
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】ドライバビリティを悪化させることなく、減速中にエンジンのトルクが「0」になると直ちに燃料噴射を停止させること。
【解決手段】エンジン10と電動機13とを有し、エンジン10もしくは電動機13、またはエンジン10と電動機13とが協働して走行可能であり、少なくとも減速中に、電動機13により回生発電が可能であるハイブリッド自動車1のハイブリッドECU18において、エンジン10の回転軸がハイブリッド自動車1を加速させるトルクを発生していないときには、エンジン10の燃料噴射を停止させると共に、エンジン10の回転を電動機13の所定のトルクによってアシストするような制御を行う。
【解決手段】エンジン10と電動機13とを有し、エンジン10もしくは電動機13、またはエンジン10と電動機13とが協働して走行可能であり、少なくとも減速中に、電動機13により回生発電が可能であるハイブリッド自動車1のハイブリッドECU18において、エンジン10の回転軸がハイブリッド自動車1を加速させるトルクを発生していないときには、エンジン10の燃料噴射を停止させると共に、エンジン10の回転を電動機13の所定のトルクによってアシストするような制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御装置、ハイブリッド自動車および制御方法、並びにプログラムに関する。
【背景技術】
【0002】
エンジンと電動機とが協働して走行するハイブリッド自動車では、減速中に、車輪側からのトルクによって、電動機の回転軸が回されるため、電動機を発電機として動作させる回生発電を行うことができる(たとえば特許文献1参照)。このとき、ハイブリッド自動車では、エンジンのアクセル開度が0度になると、回生発電が実施されるように制御される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−223421号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、自動車が減速する際には、運転者は、アクセルペダルを深く踏み込んだ状態(踏込量が大きい状態)から徐々に踏み込みが浅く(踏込量が小さい状態)なるように、アクセルペダルを操作する。このときエンジンのトルクについてもアクセルペダルの踏込量の減少にしたがって減少する。自動車が減速しているときには、車輪側からエンジンの回転軸を回そうとするトルクとエンジンのトルクとが等しくなった時点で、エンジンのトルクは0Nm(ゼロニュートンメートル)になる。すなわちエンジンのトルクが0Nmである状態とは、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していない状態である。このとき、アクセルペダルは、まだ少し踏み込まれた状態であり、エンジンのトルクは0Nmであるにもかかわらず、燃料の噴射は行われている。
【0005】
このように、既にエンジンのトルクが0Nmであるにも係わらず、燃料の噴射が行われているといった状態は、燃費の観点から好ましい状態ではない。しかしながら、エンジンのトルクが0Nmになった時点で、直ちに燃料噴射を停止させると、エンジンブレーキによる急制動がかかり、ドライバビリティが悪化する。
【0006】
本発明は、このような背景の下に行われたものであって、ドライバビリティを悪化させることなく、減速中にエンジンのトルクが0Nmになると直ちに燃料噴射を停止させることができる制御装置、ハイブリッド自動車および制御方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の1つの観点は、制御装置としての観点である。本発明の制御装置は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御装置において、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御手段を有するものである。
【0008】
さらに、ハイブリッド自動車の重量を推定する重量推定手段をさらに有し、制御手段は、重量推定手段による推定結果およびギア段数に基づいて前記所定のトルクを決定することができる。
【0009】
さらに、制御手段は、所定のトルクを、ワイパー作動継続時間に基づいて変更することができる。
【0010】
本発明の他の観点は、ハイブリッド自動車としての観点である。本発明のハイブリッド自動車は、本発明の制御装置を有するものである。
【0011】
本発明のさらに他の観点は、制御方法としての観点である。本発明の制御方法は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御方法において、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御ステップを有するものである。
【0012】
本発明のさらに他の観点は、プログラムとしての観点である。本発明のプログラムは、コンピュータ装置に、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御機能を実現させるプログラムにおいて、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御機能を実現させるものである。
【発明の効果】
【0013】
本発明によれば、ドライバビリティを悪化させることなく、減速中にエンジンのトルクが0Nmになると直ちに燃料噴射を停止させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図2】図1のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図3】図2の制御部の処理を示すフローチャートである。
【図4】第一の実施の形態のギア段数(1速〜4速)と重量推定値とアシストトルクの大きさとの対応関係を示す図である。
【図5】比較例としての従来の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図6】第一の実施の形態において、アシスト無しの場合の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図7】第一の実施の形態において、アシスト実施の場合の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図8】本発明の第二の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図9】図8のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図10】図9の制御部の処理を示すフローチャートである。
【図11】第二の実施の形態のギア段数(1速〜4速)と重量推定値と雨天補正有無との対応関係を示す図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態のハイブリッド自動車について、図1〜図11を参照しながら説明する。
【0016】
(概要について)
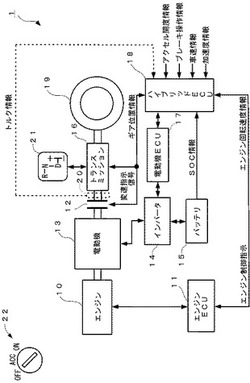
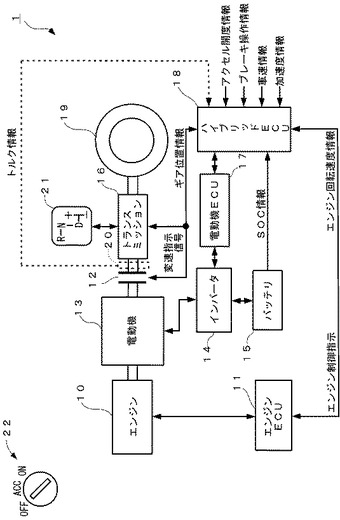
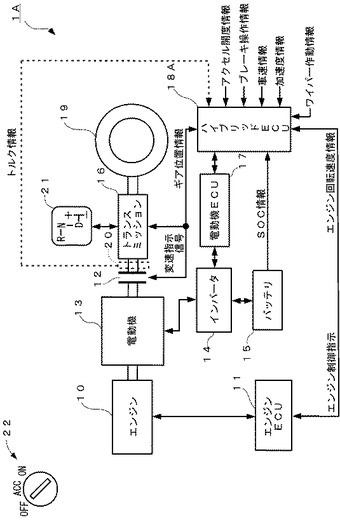
図1は、ハイブリッド自動車1の構成の例を示すブロック図である。ハイブリッド自動車1は、車両の一例である。ハイブリッド自動車1は、半自動トランスミッションの変速機を介したエンジン(内燃機関)10および/または電動機13によって駆動される。ハイブリッド自動車1の減速時には、トルク検出部20の検出結果が0Nm以下になった時点で、燃料噴射を直ちに停止させる。このとき、エンジンブレーキによる急制動を緩和するために、エンジン10の回転を電動機13の所定のトルクによってアシストする。なお、半自動トランスミッションとは、マニュアルトランスミッションと同じ構成を有しながら自動化されたクラッチ12と協働して変速操作を自動的に行うことができるトランスミッションである。
【0017】
(本発明の第一の実施の形態のハイブリッド自動車1の構成について)
ハイブリッド自動車1は、エンジン10、エンジンECU(Electronic Control Unit)11、クラッチ12、電動機13、インバータ14、バッテリ15、トランスミッション16、電動機ECU17、ハイブリッドECU18(請求項でいう制御手段および重量推定手段)、車輪19、トルク検出部20、シフト部21、およびキースイッチ22を有して構成される。なお、トランスミッション16は、上述した半自動トランスミッションを有し、ドライブレンジ(以下では、D(Drive)レンジと記す)を有するシフト部21により操作される。シフト部21がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0018】
エンジン10は、内燃機関の一例であり、エンジンECU11によって制御され、ガソリン、軽油、CNG(Compressed Natural Gas)、LPG(Liquefied Petroleum Gas)、または代替燃料等を内部で燃焼させて、軸を回転させる動力を発生させ、発生した動力を、電動機13を介してクラッチ12に伝達する。
【0019】
エンジンECU11はコンピュータであり、ハイブリッドECU18からの指示に従って電動機ECU17と連携動作し、燃料噴射量やバルブタイミングなど、エンジン10を制御する。たとえば、エンジンECU11は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、マイクロプロセッサ(マイクロコンピュータ)、DSP(Digital Signal Processor)などにより構成され、内部に、演算部、メモリ、およびI/O(Input/Output)ポートなどを有する。
【0020】
クラッチ12は、ハイブリッドECU18からの変速指示信号に基づき電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態にするものである。なお、クラッチ12の機構自体は、運転者がクラッチペダルを操作して電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態に操作するものと同じものである。また、運転者が不図示のクラッチペダルを操作することにより、ハイブリッドECU18による制御の他に、電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態に操作できるようにしてもよい。
【0021】
電動機13は、いわゆる、モータジェネレータであり、インバータ14から供給された電力により、軸を回転させる動力を発生させて、その軸出力をクラッチ12を介してトランスミッション16に供給するか、またはトランスミッション16からクラッチ12を介して供給された軸を回転させる動力によって発電し、その電力をインバータ14に供給する。たとえば、ハイブリッド自動車1が加速しているとき、または定速で走行しているときにおいて、電動機13は、軸を回転させる動力を発生させて、その軸出力をクラッチ12を介してトランスミッション16に供給し、エンジン10と協働してハイブリッド自動車1を走行させる。また、たとえば、電動機13がエンジン10によって駆動されているとき、またはハイブリッド自動車1が減速しているとき、もしくは下り坂を走行しているときなどにおいて、電動機13は、発電機として動作し、この場合、トランスミッション16からクラッチ12を介して供給された軸を回転させる動力によって発電して、電力をインバータ14に供給し、バッテリ15が充電される。このとき、電動機13は、回生電力に応じた大きさの回生トルクをフリクショントルクとして発生する。
【0022】
インバータ14は、電動機ECU17によって制御され、バッテリ15からの直流電圧を交流電圧に変換するか、または電動機13からの交流電圧を直流電圧に変換する。電動機13が動力を発生させる場合、インバータ14は、バッテリ15の直流電圧を交流電圧に変換して、電動機13に電力を供給する。電動機13が発電する場合、インバータ14は、電動機13からの交流電圧を直流電圧に変換する。すなわち、この場合、インバータ14は、バッテリ15に直流電圧を供給するための整流器および電圧調整装置としての役割を果たす。
【0023】
バッテリ15は、充放電可能な二次電池であり、電動機13が動力を発生させるとき、電動機13にインバータ14を介して電力を供給するか、または電動機13が発電しているとき、電動機13が発電する電力によって充電される。バッテリ15には、適切な充電状態(以下では、SOC(State of Charge)と称する)の範囲が決められており、ハイブリッドECU18および電動機ECU17によって、SOCがその範囲を外れないように管理されている。
【0024】
トランスミッション16は、ハイブリッドECU18からの変速指示信号に従って、複数のギア比(変速比)のいずれかを選択する半自動トランスミッション(図示せず)を有し、変速比を切り換えて、変速されたエンジン10の動力および/または電動機13の動力を車輪19に伝達する。また、減速しているとき、もしくは下り坂を走行しているときなど、トランスミッション16は、車輪19からの動力をクラッチ12を介して電動機13に伝達する。また、トランスミッション16が変速する際には、クラッチ12がいったん断状態に制御される。このように、ハイブリッドECU18は、トランスミッション16とクラッチ12とを協働させてハイブリッド自動車1の自動変速を実施する。なお、半自動トランスミッションは、運転者がシフト部21を操作して手動で任意のギア段にギア位置を変更することもできる。
【0025】
電動機ECU17は、ハイブリッドECU18からの指示に従うことにより、エンジンECU11と連携動作するコンピュータであり、インバータ14を制御することによって電動機13を制御する。たとえば、電動機ECU17は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0026】
ハイブリッドECU18は、コンピュータの一例であり、ハイブリッド走行のために、アクセル開度情報、ブレーキ操作情報、車速情報、加速度情報、ギア位置情報、エンジン回転速度情報、およびSOC情報を取得する。取得したこれらの情報に基づいて、ハイブリッドECU18は、変速指示信号を供給することでクラッチ12およびトランスミッション16を制御し、電動機ECU17に対して電動機13およびインバータ14の制御指示を与え、エンジンECU11に対してエンジン10の制御指示を与える。これらの制御指示には、後述するアシスト制御指示および燃料噴射制御指示も含まれる。たとえば、ハイブリッドECU18は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0027】
なお、エンジンECU11、電動機ECU17、およびハイブリッドECU18によって実行されるプログラムは、たとえば、エンジンECU11、電動機ECU17、およびハイブリッドECU18の内部の不揮発性のメモリにあらかじめ記憶しておくことで、コンピュータであるエンジンECU11、電動機ECU17、およびハイブリッドECU18にあらかじめインストールしておくことができる。
【0028】
エンジンECU11、電動機ECU17、およびハイブリッドECU18は、CAN(Control Area Network)などの規格に準拠したバスなどにより相互に接続されている。
【0029】
車輪19は、路面に駆動力を伝達する駆動輪である。なお、図1には、1つの車輪19のみが図示されているが、実際には、ハイブリッド自動車1は、複数の車輪19を有する。
【0030】
トルク検出部20は、トランスミッション16の入力軸の角加速度を測定することにより、入力軸のトルクを検出する。すなわち、トルクN、慣性モーメントI、角加速度αとしたときに、トルクNは、N=Iαにより求めることができる。ここで、入力軸の慣性モーメントIは一定であるので、入力軸の角加速度αを測定すれば、入力軸のトルクNを検出することができる。また、トランスミッション16の入力軸のトルクを検出することにより、クラッチ12、電動機13を介してエンジン10の回転軸のトルクを検出することができる。
【0031】
なお、トルク検出部20の検出結果がプラス側であるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を加速させるトルクを発生していることを意味している。また、クラッチ12が接状態であり、トルク検出部20の検出結果が0Nmであるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を加速も減速もさせないことを意味している。また、トルク検出部20の検出結果がマイナス側であるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を減速させるトルク(すなわちフリクショントルク)を発生していることを意味している。
【0032】
シフト部21は、既に説明したように、トランスミッション16の半自動トランスミッションに運転者からの指示を与えるものであり、シフト部21がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0033】
キースイッチ22は、運転を開始するときにユーザにより、たとえばキーが差し込まれてON/OFFされるスイッチであり、これがON状態になることによってハイブリッド自動車1の各部は起動し、キースイッチ22がOFF状態になることによってハイブリッド自動車1の各部は停止する。
【0034】
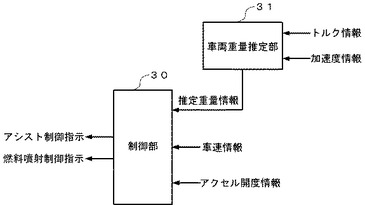
図2は、プログラムを実行するハイブリッドECU18において実現される機能の構成の例を示すブロック図である。すなわち、ハイブリッドECU18がプログラムを実行すると、ハイブリッドECU18に、制御部30(請求項でいう制御手段)および車両重量推定部31(請求項でいう重量推定手段)の機能が実現される。
【0035】
制御部30は、車速情報、アクセル開度情報、および推定重量情報に基づいてエンジンECU11に燃料噴射制御指示を行い、電動機ECU17にアシスト制御指示を行う機能である。
【0036】
車両重量推定部31は、トルク情報および加速度情報に基づいてハイブリッド自動車1の重量を推定する機能である。すなわち、ニュートンの運動方程式によれば、重量m、力(トルク)F、加速度βとしたときに、重量mは、m=F/βにより求めることができる。これにより、ハイブリッド自動車1の加速度とエンジン10の出力トルクとを計測することによって、ハイブリッド自動車1の重量を推定することができる。なお、トルク情報は、トルク検出部20が検出するトランスミッション16の入力軸のトルクを示す情報であり、加速度情報は、車速情報に基づき車速の変化から取得したり、あるいは不図示の加速度センサなどによって検出するものとする。これにより、ハイブリッド自動車1が、たとえばトラックである場合、荷台が空積、半積、定積の場合で重量は大きく変化するが、車両重量推定部31は、このような重量の変化を検出することができる。
【0037】
(ハイブリッドECU18の動作について)
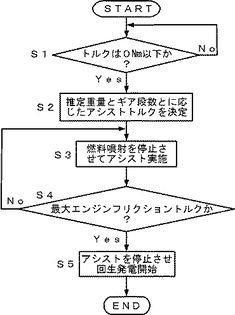
次に、図3のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる燃料噴射制御およびアシスト制御の処理を説明する。なお、図3のステップS1〜S5の手続きによる処理は1周期分の処理であり、キースイッチ22がON状態である限り処理は繰り返し実行されるものとする。
【0038】
図3のフローチャートの処理が実行される前提となる状態は、キースイッチ22がON状態であり、ハイブリッドECU18がプログラムを実行し、ハイブリッドECU18に制御部30および車両重量推定部31の機能が実現されている状態であるとする。さらに、ハイブリッド自動車1は、減速中であり、電動機13は、トルクを発生させていない状態であり、クラッチ12は、接続状態であるとすると、図3の「START」の条件が満足される。このとき、トルク検出部20の検出結果は、そのままエンジン10の回転軸のトルクになる。このような状態であるときに、手続きはステップS1に進む。
【0039】
ステップS1において、制御部30は、トルク検出部20の検出結果が0Nm以下か否かを判定する。ステップS1において、0Nm以下と判定されると、手続きはステップS2に進む。一方、ステップS1において、0Nmを超えていると判定されると、手続きはステップS1を繰り返す。
【0040】
ステップS2において、制御部30は、車両重量推定部31が推定したハイブリッド自動車1の重量とハイブリッド自動車1のギア段数とに応じたアシストトルクを決定し、手続きはステップS3に進む。なお、推定重量とギア段数とに応じたアシストトルクについては後述する。
【0041】
ステップS3において、制御部30は、エンジンECU11に対して燃料噴射を停止させる指示を行い、電動機ECU17に対してステップS2で決定したアシストトルクによるアシスト実施を指示し、手続きはステップS4に進む。
【0042】
ステップS4において、制御部30は、トルク検出部20の検出結果が最大エンジンフリクショントルクであるか否かを判定する。すなわち制御部30は、トルク検出部20が検出するトランスミッション16の入力軸の角加速度がマイナスの値であり、その値が最大エンジンフリクショントルクと等しいか否かを判定する。ステップS4において、最大エンジンフリクショントルクであると判定されると、手続きはステップS5に進む。一方、ステップS4において、最大エンジンフリクショントルクでないと判定されると、手続きは、ステップS3に戻る。
【0043】
ステップS5において、制御部30は、電動機ECU17にアシスト停止を指示すると共に、回生発電の開始を指示して1周期分の処理を終了する(END)。
【0044】
ここで、アシストトルクの増減の制御について、図4の表を参照して説明する。図4の表は、ギア段数(1速〜4速)と重量推定値(W〜X、X〜Y、Y〜Z)とアシストトルクの大きさとの対応関係を示している。図4の表中の括弧内の数字は、アシストトルクの大きさの順位を示している。すなわち、(1)〜(12)の中で、(1)が最大のアシストトルクであり、(12)が最小のアシストトルクである。
【0045】
たとえば、重量推定値が軽く空積相当(W〜X)であり、ギア段数が1速であれば、ギア比が大きいためエンジンブレーキの効きが良く、その上に、車体の慣性力が小さいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も大きい。したがって、この場合には最大のアシストトルクによって、アシストを実施する。一方、重量推定値が重く定積相当(Y〜Z)であり、ギア段数が4速であれば、ギア比が小さいためエンジンブレーキの効きが悪く、その上に、車体の慣性力が大きいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も小さい。したがって、この場合には最小のアシストトルクによって、アシストを実施する。
【0046】
(効果について)
制御部30の制御によれば、エンジン10のトルクが0Nmであるとき(すなわちエンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないとき)、エンジン10の燃料噴射を停止させると共に、エンジン10の回転を電動機13の所定のトルクによってアシストを行うようにしたので、ドライバビリティを悪化させることなく、減速中にエンジン10のトルクが0Nmになると直ちに燃料噴射を停止させることができる。
【0047】
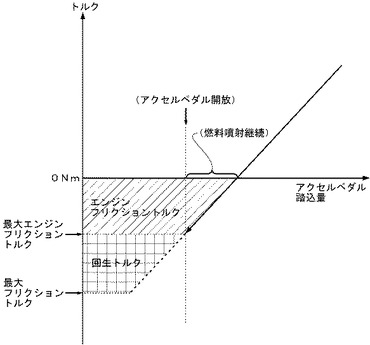
ここで、比較例として、従来の減速時のアクセルペダルの踏込量とトルクとの関係を図5に示す。図5は、横軸にアクセルペダルの踏込量をとり、縦軸にトルク検出部20が検出したトルクをとる。
【0048】
図5の左下向きの矢印はアクセルペダルの踏込量が徐々に小さくなるに従ってエンジン10の燃料噴射量は少なくなり、エンジン10の回転軸のトルクが小さくなる状態を示している。
【0049】
従来においては、アクセルペダルの踏込量が小さくなり、アクセルペダルが開放されると、ここで燃料噴射も停止し、エンジン10のフリクショントルクは、最大になる。その後、電動機13は回生発電を開始し、回生トルクが発生する。電動機13の最大回生トルクとエンジン10の最大フリクショントルク(最大エンジンフリクショントルクとして図示)とが加算されると最大フリクショントルクになる。このとき、従来は、図5の例のように、エンジン10の回転軸のトルク0Nmになっても燃料噴射は継続される。
【0050】
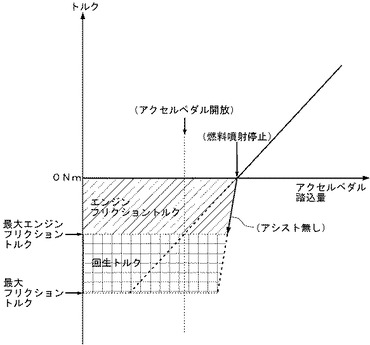
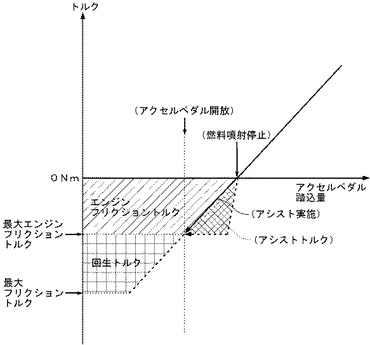
これに対して、制御部30によるハイブリッド自動車1の減速時の制御では、図6および図7に示すように、トルク検出部20の検出結果が0Nmになった時点で、速やかに、燃料噴射を停止させる。これにより、燃料消費を節約することができる。
【0051】
また、このときに、必要に応じて、図7に示すように、エンジン10の回転を電動機13によりアシストする。図7における斜線が交差するハッチング領域は、電動機13によるアシストトルクを示している。これにより、燃料噴射が急に停止されたことによるエンジンブレーキの急制動を緩和させることができる。図6の例は、推定重量が大きく、ギア段数がHIGH側(3速または4速)にあり、アシストを必要としない場合(アシスト無し)の例であり、図7の例は、推定重量が小さく、ギア段数がLOW側(1速または2速)にあり、アシストを必要とする場合(アシスト実施)の例である。なお、図4で説明したように、ハイブリッド自動車1の推定重量およびギア段数に応じてアシストトルクを適宜変更可能であるので、最適なアシストトルクによって、アシストを実施することができる。
【0052】
(本発明の第二の実施の形態のハイブリッド自動車1Aについて)
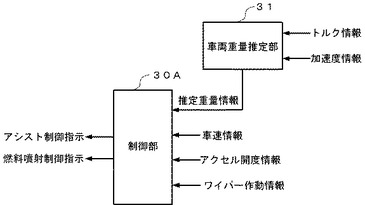
ハイブリッド自動車1Aについて、図8〜図11を参照して説明する。ハイブリッド自動車1Aの構成は、図8に示すように、ハイブリッド自動車1と基本的には同じであり、ハイブリッドECU18Aの機能が異なる。ハイブリッドECU18Aの入力情報は、ハイブリッド自動車18の入力情報に加え、ワイパー作動情報が追加されている。
【0053】
ハイブリッドECU18Aの制御部30Aは、図9に示すように、推定重量情報、車速情報、アクセル開度情報に加え、ワイパー作動情報を取り込み、アシスト制御指示および燃料噴射制御指示を送出する。
【0054】
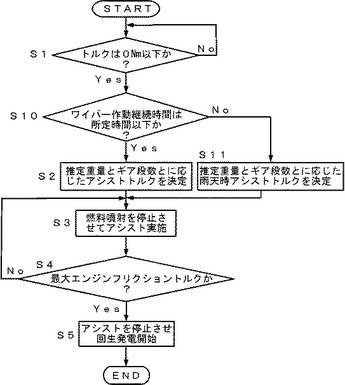
制御部30Aによる制御は、図10に示すように、制御部30のステップS1〜S5の手続きに加え、ステップS10およびステップS11の手続きが追加されている。ステップS10によれば、制御部30Aは、ワイパー作動情報に基づいて、ワイパー作動継続時間が所定時間以下か否かを判定する。ステップS10によりワイパー作動継続時間が所定時間以下と判定されると、手続きはステップS2に進む。一方、ステップS10によりワイパー作動継続時間が所定時間を超えていると判定されると、手続きはステップS11に進む。
【0055】
ステップS11によれば、制御部30Aは、推定重量とギア段数とに応じた雨天時アシストトルクを決定し、手続きはステップS3に進む。以下は、図3のフローチャートと同様である。
【0056】
雨天時は、晴天時に比べて車輪19がスリップを起こし易いため、晴天時以上に急制動を避ける必要性が高くなる。このため、雨天時は、晴天時に比べてハイブリッド自動車1Aの減速に伴うエンジン10の回転軸のトルクの減少が緩やかになるように、晴天時のアシストトルクに比べて雨天時のアシストトルクは、アシストトルクをさらに一定量増加させている。
【0057】
ここで、アシストトルクの雨天補正について、図11の表を参照して説明する。図11の表は、ギア段数(1速〜4速)と重量推定値と雨天補正の有無との対応関係を示している。たとえば、重量推定値が軽く空積相当であり、ギア段数が1速であれば、ギア比が大きいためエンジンブレーキの効きが良く、その上に、車体の慣性力が小さいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も大きい。したがって、この場合には雨天補正を実施する(「有」と図示)。一方、重量推定値が重く定積相当であり、ギア段数が4速であれば、ギア比が小さいためエンジンブレーキの効きが悪く、その上に、車体の慣性力が大きいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も小さい。したがって、この場合には雨天補正は実施しない(「無」と図示)。なお、半積時には、車速が小さい1速時では雨天補正は実施しない。
【0058】
(効果について)
制御部30Aによれば、アシストトルクの雨天時補正が行われ、晴天時と比べてアシストトルクがさらに増加する。これにより、雨天時には、晴天時よりも燃料噴射を速やかに停止させる際のエンジンブレーキによる急制動を、アシストにより晴天時よりもさらに緩和し、車輪19がスリップすることを避けることができる。
【0059】
(その他の実施の形態)
図3および図10のフローチャートの説明において、「以上」は、「超える」とし、「以下」は、「未満」とするなど、判定の境界値については様々に変更してもよい。
【0060】
エンジン10は、内燃機関であると説明したが、外燃機関を含む熱機関であってもよい。
【0061】
また、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18にあらかじめインストールされると説明したが、プログラムが記録されている(プログラムを記憶している)リムーバブルメディアを図示せぬドライブなどに装着し、リムーバブルメディアから読み出したプログラムをハイブリッドECU18の内部の不揮発性のメモリに記憶することにより、または、有線または無線の伝送媒体を介して送信されてきたプログラムを、図示せぬ通信部で受信し、ハイブリッドECU18の内部の不揮発性のメモリに記憶することで、コンピュータであるハイブリッドECU18にインストールすることができる。
【0062】
また、各ECUは、これらを1つにまとめたECUにより実現してもよいし、あるいは、各ECUの機能をさらに細分化したECUを新たに設けてもよい。
【0063】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであってもよいし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであってもよい。
【0064】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0065】
1,1A…ハイブリッド自動車、10…エンジン、11…エンジンECU、12…クラッチ、13…電動機、14…インバータ、15…バッテリ、16…トランスミッション、17…電動機ECU、18,18A…ハイブリッドECU、19…車輪、20…トルク検出部、30…回生制御部(制御手段)、31…車両重量推定部(重量推定手段)
【技術分野】
【0001】
本発明は、制御装置、ハイブリッド自動車および制御方法、並びにプログラムに関する。
【背景技術】
【0002】
エンジンと電動機とが協働して走行するハイブリッド自動車では、減速中に、車輪側からのトルクによって、電動機の回転軸が回されるため、電動機を発電機として動作させる回生発電を行うことができる(たとえば特許文献1参照)。このとき、ハイブリッド自動車では、エンジンのアクセル開度が0度になると、回生発電が実施されるように制御される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−223421号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、自動車が減速する際には、運転者は、アクセルペダルを深く踏み込んだ状態(踏込量が大きい状態)から徐々に踏み込みが浅く(踏込量が小さい状態)なるように、アクセルペダルを操作する。このときエンジンのトルクについてもアクセルペダルの踏込量の減少にしたがって減少する。自動車が減速しているときには、車輪側からエンジンの回転軸を回そうとするトルクとエンジンのトルクとが等しくなった時点で、エンジンのトルクは0Nm(ゼロニュートンメートル)になる。すなわちエンジンのトルクが0Nmである状態とは、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していない状態である。このとき、アクセルペダルは、まだ少し踏み込まれた状態であり、エンジンのトルクは0Nmであるにもかかわらず、燃料の噴射は行われている。
【0005】
このように、既にエンジンのトルクが0Nmであるにも係わらず、燃料の噴射が行われているといった状態は、燃費の観点から好ましい状態ではない。しかしながら、エンジンのトルクが0Nmになった時点で、直ちに燃料噴射を停止させると、エンジンブレーキによる急制動がかかり、ドライバビリティが悪化する。
【0006】
本発明は、このような背景の下に行われたものであって、ドライバビリティを悪化させることなく、減速中にエンジンのトルクが0Nmになると直ちに燃料噴射を停止させることができる制御装置、ハイブリッド自動車および制御方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の1つの観点は、制御装置としての観点である。本発明の制御装置は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御装置において、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御手段を有するものである。
【0008】
さらに、ハイブリッド自動車の重量を推定する重量推定手段をさらに有し、制御手段は、重量推定手段による推定結果およびギア段数に基づいて前記所定のトルクを決定することができる。
【0009】
さらに、制御手段は、所定のトルクを、ワイパー作動継続時間に基づいて変更することができる。
【0010】
本発明の他の観点は、ハイブリッド自動車としての観点である。本発明のハイブリッド自動車は、本発明の制御装置を有するものである。
【0011】
本発明のさらに他の観点は、制御方法としての観点である。本発明の制御方法は、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御方法において、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御ステップを有するものである。
【0012】
本発明のさらに他の観点は、プログラムとしての観点である。本発明のプログラムは、コンピュータ装置に、エンジンと電動機とを有し、エンジンもしくは電動機、またはエンジンと電動機とが協働して走行可能であり、少なくとも減速中に、電動機により回生発電が可能であるハイブリッド自動車の制御機能を実現させるプログラムにおいて、エンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないときには、エンジンの燃料噴射を停止させると共に、エンジンの回転を電動機の所定のトルクによってアシストする制御機能を実現させるものである。
【発明の効果】
【0013】
本発明によれば、ドライバビリティを悪化させることなく、減速中にエンジンのトルクが0Nmになると直ちに燃料噴射を停止させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図2】図1のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図3】図2の制御部の処理を示すフローチャートである。
【図4】第一の実施の形態のギア段数(1速〜4速)と重量推定値とアシストトルクの大きさとの対応関係を示す図である。
【図5】比較例としての従来の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図6】第一の実施の形態において、アシスト無しの場合の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図7】第一の実施の形態において、アシスト実施の場合の減速時のアクセルペダルの踏込量とトルクと燃料噴射量との関係を示す図である。
【図8】本発明の第二の実施の形態のハイブリッド自動車の構成の例を示すブロック図である。
【図9】図8のハイブリッドECUにおいて実現される機能の構成の例を示すブロック図である。
【図10】図9の制御部の処理を示すフローチャートである。
【図11】第二の実施の形態のギア段数(1速〜4速)と重量推定値と雨天補正有無との対応関係を示す図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態のハイブリッド自動車について、図1〜図11を参照しながら説明する。
【0016】
(概要について)
図1は、ハイブリッド自動車1の構成の例を示すブロック図である。ハイブリッド自動車1は、車両の一例である。ハイブリッド自動車1は、半自動トランスミッションの変速機を介したエンジン(内燃機関)10および/または電動機13によって駆動される。ハイブリッド自動車1の減速時には、トルク検出部20の検出結果が0Nm以下になった時点で、燃料噴射を直ちに停止させる。このとき、エンジンブレーキによる急制動を緩和するために、エンジン10の回転を電動機13の所定のトルクによってアシストする。なお、半自動トランスミッションとは、マニュアルトランスミッションと同じ構成を有しながら自動化されたクラッチ12と協働して変速操作を自動的に行うことができるトランスミッションである。
【0017】
(本発明の第一の実施の形態のハイブリッド自動車1の構成について)
ハイブリッド自動車1は、エンジン10、エンジンECU(Electronic Control Unit)11、クラッチ12、電動機13、インバータ14、バッテリ15、トランスミッション16、電動機ECU17、ハイブリッドECU18(請求項でいう制御手段および重量推定手段)、車輪19、トルク検出部20、シフト部21、およびキースイッチ22を有して構成される。なお、トランスミッション16は、上述した半自動トランスミッションを有し、ドライブレンジ(以下では、D(Drive)レンジと記す)を有するシフト部21により操作される。シフト部21がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0018】
エンジン10は、内燃機関の一例であり、エンジンECU11によって制御され、ガソリン、軽油、CNG(Compressed Natural Gas)、LPG(Liquefied Petroleum Gas)、または代替燃料等を内部で燃焼させて、軸を回転させる動力を発生させ、発生した動力を、電動機13を介してクラッチ12に伝達する。
【0019】
エンジンECU11はコンピュータであり、ハイブリッドECU18からの指示に従って電動機ECU17と連携動作し、燃料噴射量やバルブタイミングなど、エンジン10を制御する。たとえば、エンジンECU11は、CPU(Central Processing Unit)、ASIC(Application Specific Integrated Circuit)、マイクロプロセッサ(マイクロコンピュータ)、DSP(Digital Signal Processor)などにより構成され、内部に、演算部、メモリ、およびI/O(Input/Output)ポートなどを有する。
【0020】
クラッチ12は、ハイブリッドECU18からの変速指示信号に基づき電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態にするものである。なお、クラッチ12の機構自体は、運転者がクラッチペダルを操作して電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態に操作するものと同じものである。また、運転者が不図示のクラッチペダルを操作することにより、ハイブリッドECU18による制御の他に、電動機13の回転軸とトランスミッション16の入力軸とを接状態または断状態に操作できるようにしてもよい。
【0021】
電動機13は、いわゆる、モータジェネレータであり、インバータ14から供給された電力により、軸を回転させる動力を発生させて、その軸出力をクラッチ12を介してトランスミッション16に供給するか、またはトランスミッション16からクラッチ12を介して供給された軸を回転させる動力によって発電し、その電力をインバータ14に供給する。たとえば、ハイブリッド自動車1が加速しているとき、または定速で走行しているときにおいて、電動機13は、軸を回転させる動力を発生させて、その軸出力をクラッチ12を介してトランスミッション16に供給し、エンジン10と協働してハイブリッド自動車1を走行させる。また、たとえば、電動機13がエンジン10によって駆動されているとき、またはハイブリッド自動車1が減速しているとき、もしくは下り坂を走行しているときなどにおいて、電動機13は、発電機として動作し、この場合、トランスミッション16からクラッチ12を介して供給された軸を回転させる動力によって発電して、電力をインバータ14に供給し、バッテリ15が充電される。このとき、電動機13は、回生電力に応じた大きさの回生トルクをフリクショントルクとして発生する。
【0022】
インバータ14は、電動機ECU17によって制御され、バッテリ15からの直流電圧を交流電圧に変換するか、または電動機13からの交流電圧を直流電圧に変換する。電動機13が動力を発生させる場合、インバータ14は、バッテリ15の直流電圧を交流電圧に変換して、電動機13に電力を供給する。電動機13が発電する場合、インバータ14は、電動機13からの交流電圧を直流電圧に変換する。すなわち、この場合、インバータ14は、バッテリ15に直流電圧を供給するための整流器および電圧調整装置としての役割を果たす。
【0023】
バッテリ15は、充放電可能な二次電池であり、電動機13が動力を発生させるとき、電動機13にインバータ14を介して電力を供給するか、または電動機13が発電しているとき、電動機13が発電する電力によって充電される。バッテリ15には、適切な充電状態(以下では、SOC(State of Charge)と称する)の範囲が決められており、ハイブリッドECU18および電動機ECU17によって、SOCがその範囲を外れないように管理されている。
【0024】
トランスミッション16は、ハイブリッドECU18からの変速指示信号に従って、複数のギア比(変速比)のいずれかを選択する半自動トランスミッション(図示せず)を有し、変速比を切り換えて、変速されたエンジン10の動力および/または電動機13の動力を車輪19に伝達する。また、減速しているとき、もしくは下り坂を走行しているときなど、トランスミッション16は、車輪19からの動力をクラッチ12を介して電動機13に伝達する。また、トランスミッション16が変速する際には、クラッチ12がいったん断状態に制御される。このように、ハイブリッドECU18は、トランスミッション16とクラッチ12とを協働させてハイブリッド自動車1の自動変速を実施する。なお、半自動トランスミッションは、運転者がシフト部21を操作して手動で任意のギア段にギア位置を変更することもできる。
【0025】
電動機ECU17は、ハイブリッドECU18からの指示に従うことにより、エンジンECU11と連携動作するコンピュータであり、インバータ14を制御することによって電動機13を制御する。たとえば、電動機ECU17は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0026】
ハイブリッドECU18は、コンピュータの一例であり、ハイブリッド走行のために、アクセル開度情報、ブレーキ操作情報、車速情報、加速度情報、ギア位置情報、エンジン回転速度情報、およびSOC情報を取得する。取得したこれらの情報に基づいて、ハイブリッドECU18は、変速指示信号を供給することでクラッチ12およびトランスミッション16を制御し、電動機ECU17に対して電動機13およびインバータ14の制御指示を与え、エンジンECU11に対してエンジン10の制御指示を与える。これらの制御指示には、後述するアシスト制御指示および燃料噴射制御指示も含まれる。たとえば、ハイブリッドECU18は、CPU、ASIC、マイクロプロセッサ(マイクロコンピュータ)、DSPなどにより構成され、内部に、演算部、メモリ、およびI/Oポートなどを有する。
【0027】
なお、エンジンECU11、電動機ECU17、およびハイブリッドECU18によって実行されるプログラムは、たとえば、エンジンECU11、電動機ECU17、およびハイブリッドECU18の内部の不揮発性のメモリにあらかじめ記憶しておくことで、コンピュータであるエンジンECU11、電動機ECU17、およびハイブリッドECU18にあらかじめインストールしておくことができる。
【0028】
エンジンECU11、電動機ECU17、およびハイブリッドECU18は、CAN(Control Area Network)などの規格に準拠したバスなどにより相互に接続されている。
【0029】
車輪19は、路面に駆動力を伝達する駆動輪である。なお、図1には、1つの車輪19のみが図示されているが、実際には、ハイブリッド自動車1は、複数の車輪19を有する。
【0030】
トルク検出部20は、トランスミッション16の入力軸の角加速度を測定することにより、入力軸のトルクを検出する。すなわち、トルクN、慣性モーメントI、角加速度αとしたときに、トルクNは、N=Iαにより求めることができる。ここで、入力軸の慣性モーメントIは一定であるので、入力軸の角加速度αを測定すれば、入力軸のトルクNを検出することができる。また、トランスミッション16の入力軸のトルクを検出することにより、クラッチ12、電動機13を介してエンジン10の回転軸のトルクを検出することができる。
【0031】
なお、トルク検出部20の検出結果がプラス側であるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を加速させるトルクを発生していることを意味している。また、クラッチ12が接状態であり、トルク検出部20の検出結果が0Nmであるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を加速も減速もさせないことを意味している。また、トルク検出部20の検出結果がマイナス側であるときには、トランスミッション16の入力軸のトルク(すなわちエンジン10および/または電動機13の回転軸のトルク)がハイブリッド自動車1を減速させるトルク(すなわちフリクショントルク)を発生していることを意味している。
【0032】
シフト部21は、既に説明したように、トランスミッション16の半自動トランスミッションに運転者からの指示を与えるものであり、シフト部21がDレンジにあるときには、半自動トランスミッションの変速操作が自動化される。
【0033】
キースイッチ22は、運転を開始するときにユーザにより、たとえばキーが差し込まれてON/OFFされるスイッチであり、これがON状態になることによってハイブリッド自動車1の各部は起動し、キースイッチ22がOFF状態になることによってハイブリッド自動車1の各部は停止する。
【0034】
図2は、プログラムを実行するハイブリッドECU18において実現される機能の構成の例を示すブロック図である。すなわち、ハイブリッドECU18がプログラムを実行すると、ハイブリッドECU18に、制御部30(請求項でいう制御手段)および車両重量推定部31(請求項でいう重量推定手段)の機能が実現される。
【0035】
制御部30は、車速情報、アクセル開度情報、および推定重量情報に基づいてエンジンECU11に燃料噴射制御指示を行い、電動機ECU17にアシスト制御指示を行う機能である。
【0036】
車両重量推定部31は、トルク情報および加速度情報に基づいてハイブリッド自動車1の重量を推定する機能である。すなわち、ニュートンの運動方程式によれば、重量m、力(トルク)F、加速度βとしたときに、重量mは、m=F/βにより求めることができる。これにより、ハイブリッド自動車1の加速度とエンジン10の出力トルクとを計測することによって、ハイブリッド自動車1の重量を推定することができる。なお、トルク情報は、トルク検出部20が検出するトランスミッション16の入力軸のトルクを示す情報であり、加速度情報は、車速情報に基づき車速の変化から取得したり、あるいは不図示の加速度センサなどによって検出するものとする。これにより、ハイブリッド自動車1が、たとえばトラックである場合、荷台が空積、半積、定積の場合で重量は大きく変化するが、車両重量推定部31は、このような重量の変化を検出することができる。
【0037】
(ハイブリッドECU18の動作について)
次に、図3のフローチャートを参照して、プログラムを実行するハイブリッドECU18において行われる燃料噴射制御およびアシスト制御の処理を説明する。なお、図3のステップS1〜S5の手続きによる処理は1周期分の処理であり、キースイッチ22がON状態である限り処理は繰り返し実行されるものとする。
【0038】
図3のフローチャートの処理が実行される前提となる状態は、キースイッチ22がON状態であり、ハイブリッドECU18がプログラムを実行し、ハイブリッドECU18に制御部30および車両重量推定部31の機能が実現されている状態であるとする。さらに、ハイブリッド自動車1は、減速中であり、電動機13は、トルクを発生させていない状態であり、クラッチ12は、接続状態であるとすると、図3の「START」の条件が満足される。このとき、トルク検出部20の検出結果は、そのままエンジン10の回転軸のトルクになる。このような状態であるときに、手続きはステップS1に進む。
【0039】
ステップS1において、制御部30は、トルク検出部20の検出結果が0Nm以下か否かを判定する。ステップS1において、0Nm以下と判定されると、手続きはステップS2に進む。一方、ステップS1において、0Nmを超えていると判定されると、手続きはステップS1を繰り返す。
【0040】
ステップS2において、制御部30は、車両重量推定部31が推定したハイブリッド自動車1の重量とハイブリッド自動車1のギア段数とに応じたアシストトルクを決定し、手続きはステップS3に進む。なお、推定重量とギア段数とに応じたアシストトルクについては後述する。
【0041】
ステップS3において、制御部30は、エンジンECU11に対して燃料噴射を停止させる指示を行い、電動機ECU17に対してステップS2で決定したアシストトルクによるアシスト実施を指示し、手続きはステップS4に進む。
【0042】
ステップS4において、制御部30は、トルク検出部20の検出結果が最大エンジンフリクショントルクであるか否かを判定する。すなわち制御部30は、トルク検出部20が検出するトランスミッション16の入力軸の角加速度がマイナスの値であり、その値が最大エンジンフリクショントルクと等しいか否かを判定する。ステップS4において、最大エンジンフリクショントルクであると判定されると、手続きはステップS5に進む。一方、ステップS4において、最大エンジンフリクショントルクでないと判定されると、手続きは、ステップS3に戻る。
【0043】
ステップS5において、制御部30は、電動機ECU17にアシスト停止を指示すると共に、回生発電の開始を指示して1周期分の処理を終了する(END)。
【0044】
ここで、アシストトルクの増減の制御について、図4の表を参照して説明する。図4の表は、ギア段数(1速〜4速)と重量推定値(W〜X、X〜Y、Y〜Z)とアシストトルクの大きさとの対応関係を示している。図4の表中の括弧内の数字は、アシストトルクの大きさの順位を示している。すなわち、(1)〜(12)の中で、(1)が最大のアシストトルクであり、(12)が最小のアシストトルクである。
【0045】
たとえば、重量推定値が軽く空積相当(W〜X)であり、ギア段数が1速であれば、ギア比が大きいためエンジンブレーキの効きが良く、その上に、車体の慣性力が小さいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も大きい。したがって、この場合には最大のアシストトルクによって、アシストを実施する。一方、重量推定値が重く定積相当(Y〜Z)であり、ギア段数が4速であれば、ギア比が小さいためエンジンブレーキの効きが悪く、その上に、車体の慣性力が大きいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も小さい。したがって、この場合には最小のアシストトルクによって、アシストを実施する。
【0046】
(効果について)
制御部30の制御によれば、エンジン10のトルクが0Nmであるとき(すなわちエンジンの回転軸がハイブリッド自動車を加速させるトルクを発生していないとき)、エンジン10の燃料噴射を停止させると共に、エンジン10の回転を電動機13の所定のトルクによってアシストを行うようにしたので、ドライバビリティを悪化させることなく、減速中にエンジン10のトルクが0Nmになると直ちに燃料噴射を停止させることができる。
【0047】
ここで、比較例として、従来の減速時のアクセルペダルの踏込量とトルクとの関係を図5に示す。図5は、横軸にアクセルペダルの踏込量をとり、縦軸にトルク検出部20が検出したトルクをとる。
【0048】
図5の左下向きの矢印はアクセルペダルの踏込量が徐々に小さくなるに従ってエンジン10の燃料噴射量は少なくなり、エンジン10の回転軸のトルクが小さくなる状態を示している。
【0049】
従来においては、アクセルペダルの踏込量が小さくなり、アクセルペダルが開放されると、ここで燃料噴射も停止し、エンジン10のフリクショントルクは、最大になる。その後、電動機13は回生発電を開始し、回生トルクが発生する。電動機13の最大回生トルクとエンジン10の最大フリクショントルク(最大エンジンフリクショントルクとして図示)とが加算されると最大フリクショントルクになる。このとき、従来は、図5の例のように、エンジン10の回転軸のトルク0Nmになっても燃料噴射は継続される。
【0050】
これに対して、制御部30によるハイブリッド自動車1の減速時の制御では、図6および図7に示すように、トルク検出部20の検出結果が0Nmになった時点で、速やかに、燃料噴射を停止させる。これにより、燃料消費を節約することができる。
【0051】
また、このときに、必要に応じて、図7に示すように、エンジン10の回転を電動機13によりアシストする。図7における斜線が交差するハッチング領域は、電動機13によるアシストトルクを示している。これにより、燃料噴射が急に停止されたことによるエンジンブレーキの急制動を緩和させることができる。図6の例は、推定重量が大きく、ギア段数がHIGH側(3速または4速)にあり、アシストを必要としない場合(アシスト無し)の例であり、図7の例は、推定重量が小さく、ギア段数がLOW側(1速または2速)にあり、アシストを必要とする場合(アシスト実施)の例である。なお、図4で説明したように、ハイブリッド自動車1の推定重量およびギア段数に応じてアシストトルクを適宜変更可能であるので、最適なアシストトルクによって、アシストを実施することができる。
【0052】
(本発明の第二の実施の形態のハイブリッド自動車1Aについて)
ハイブリッド自動車1Aについて、図8〜図11を参照して説明する。ハイブリッド自動車1Aの構成は、図8に示すように、ハイブリッド自動車1と基本的には同じであり、ハイブリッドECU18Aの機能が異なる。ハイブリッドECU18Aの入力情報は、ハイブリッド自動車18の入力情報に加え、ワイパー作動情報が追加されている。
【0053】
ハイブリッドECU18Aの制御部30Aは、図9に示すように、推定重量情報、車速情報、アクセル開度情報に加え、ワイパー作動情報を取り込み、アシスト制御指示および燃料噴射制御指示を送出する。
【0054】
制御部30Aによる制御は、図10に示すように、制御部30のステップS1〜S5の手続きに加え、ステップS10およびステップS11の手続きが追加されている。ステップS10によれば、制御部30Aは、ワイパー作動情報に基づいて、ワイパー作動継続時間が所定時間以下か否かを判定する。ステップS10によりワイパー作動継続時間が所定時間以下と判定されると、手続きはステップS2に進む。一方、ステップS10によりワイパー作動継続時間が所定時間を超えていると判定されると、手続きはステップS11に進む。
【0055】
ステップS11によれば、制御部30Aは、推定重量とギア段数とに応じた雨天時アシストトルクを決定し、手続きはステップS3に進む。以下は、図3のフローチャートと同様である。
【0056】
雨天時は、晴天時に比べて車輪19がスリップを起こし易いため、晴天時以上に急制動を避ける必要性が高くなる。このため、雨天時は、晴天時に比べてハイブリッド自動車1Aの減速に伴うエンジン10の回転軸のトルクの減少が緩やかになるように、晴天時のアシストトルクに比べて雨天時のアシストトルクは、アシストトルクをさらに一定量増加させている。
【0057】
ここで、アシストトルクの雨天補正について、図11の表を参照して説明する。図11の表は、ギア段数(1速〜4速)と重量推定値と雨天補正の有無との対応関係を示している。たとえば、重量推定値が軽く空積相当であり、ギア段数が1速であれば、ギア比が大きいためエンジンブレーキの効きが良く、その上に、車体の慣性力が小さいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も大きい。したがって、この場合には雨天補正を実施する(「有」と図示)。一方、重量推定値が重く定積相当であり、ギア段数が4速であれば、ギア比が小さいためエンジンブレーキの効きが悪く、その上に、車体の慣性力が大きいため、燃料噴射が停止される際の急なフリクション増加による制動のショックは最も小さい。したがって、この場合には雨天補正は実施しない(「無」と図示)。なお、半積時には、車速が小さい1速時では雨天補正は実施しない。
【0058】
(効果について)
制御部30Aによれば、アシストトルクの雨天時補正が行われ、晴天時と比べてアシストトルクがさらに増加する。これにより、雨天時には、晴天時よりも燃料噴射を速やかに停止させる際のエンジンブレーキによる急制動を、アシストにより晴天時よりもさらに緩和し、車輪19がスリップすることを避けることができる。
【0059】
(その他の実施の形態)
図3および図10のフローチャートの説明において、「以上」は、「超える」とし、「以下」は、「未満」とするなど、判定の境界値については様々に変更してもよい。
【0060】
エンジン10は、内燃機関であると説明したが、外燃機関を含む熱機関であってもよい。
【0061】
また、ハイブリッドECU18によって実行されるプログラムは、ハイブリッドECU18にあらかじめインストールされると説明したが、プログラムが記録されている(プログラムを記憶している)リムーバブルメディアを図示せぬドライブなどに装着し、リムーバブルメディアから読み出したプログラムをハイブリッドECU18の内部の不揮発性のメモリに記憶することにより、または、有線または無線の伝送媒体を介して送信されてきたプログラムを、図示せぬ通信部で受信し、ハイブリッドECU18の内部の不揮発性のメモリに記憶することで、コンピュータであるハイブリッドECU18にインストールすることができる。
【0062】
また、各ECUは、これらを1つにまとめたECUにより実現してもよいし、あるいは、各ECUの機能をさらに細分化したECUを新たに設けてもよい。
【0063】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであってもよいし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであってもよい。
【0064】
また、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【符号の説明】
【0065】
1,1A…ハイブリッド自動車、10…エンジン、11…エンジンECU、12…クラッチ、13…電動機、14…インバータ、15…バッテリ、16…トランスミッション、17…電動機ECU、18,18A…ハイブリッドECU、19…車輪、20…トルク検出部、30…回生制御部(制御手段)、31…車両重量推定部(重量推定手段)
【特許請求の範囲】
【請求項1】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御装置において、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御手段を有する、
ことを特徴とする制御装置。
【請求項2】
請求項1記載の制御装置であって、
前記ハイブリッド自動車の重量を推定する重量推定手段をさらに有し、
前記制御手段は、前記重量推定手段による推定結果およびギア段数に基づいて前記所定のトルクを決定する、
ことを特徴とする制御装置。
【請求項3】
請求項1または2記載の制御装置であって、
前記制御手段は、前記所定のトルクを、ワイパー作動継続時間に基づいて変更する、
ことを特徴とする制御装置。
【請求項4】
請求項1から3のいずれか1項記載の制御装置を有することを特徴とするハイブリッド自動車。
【請求項5】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御方法において、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御ステップを有する、
ことを特徴とする制御方法。
【請求項6】
コンピュータ装置に、
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御機能を実現させるプログラムにおいて、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御機能を実現させる、
ことを特徴とするプログラム。
【請求項1】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御装置において、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御手段を有する、
ことを特徴とする制御装置。
【請求項2】
請求項1記載の制御装置であって、
前記ハイブリッド自動車の重量を推定する重量推定手段をさらに有し、
前記制御手段は、前記重量推定手段による推定結果およびギア段数に基づいて前記所定のトルクを決定する、
ことを特徴とする制御装置。
【請求項3】
請求項1または2記載の制御装置であって、
前記制御手段は、前記所定のトルクを、ワイパー作動継続時間に基づいて変更する、
ことを特徴とする制御装置。
【請求項4】
請求項1から3のいずれか1項記載の制御装置を有することを特徴とするハイブリッド自動車。
【請求項5】
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御方法において、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御ステップを有する、
ことを特徴とする制御方法。
【請求項6】
コンピュータ装置に、
エンジンと電動機とを有し、前記エンジンもしくは前記電動機、または前記エンジンと前記電動機とが協働して走行可能であり、少なくとも減速中に、前記電動機により回生発電が可能であるハイブリッド自動車の制御機能を実現させるプログラムにおいて、
前記エンジンの回転軸が前記ハイブリッド自動車を加速させるトルクを発生していないときには、前記エンジンの燃料噴射を停止させると共に、前記エンジンの回転を前記電動機の所定のトルクによってアシストする制御機能を実現させる、
ことを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−228998(P2012−228998A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−99775(P2011−99775)
【出願日】平成23年4月27日(2011.4.27)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月27日(2011.4.27)
【出願人】(000005463)日野自動車株式会社 (1,484)
【Fターム(参考)】
[ Back to top ]