
制御装置、ヘッドマウントディスプレイ装置、プログラム及び制御方法

【課題】 ヘッドマウントディスプレイ装置の作動状況に基づいて、操作に必要とされる、利用者の頭部動作の角速度を特定する閾値について、好適なものを設定する。
【解決手段】 頭部動き検出部200で検出される角速度から、利用者の頭部動作を特定し、作動状況に基づいて当該角速度を規定する閾値に、好適なものを設定し、利用者の意図する処理を、より好適に実行することが可能な制御部310を備える。当該制御部310は、動作モードと、アーム部150の方向と、を検出し、設定された好適な閾値に基づいて、利用者の頭部動作に対応する各処理を実行する。
【解決手段】 頭部動き検出部200で検出される角速度から、利用者の頭部動作を特定し、作動状況に基づいて当該角速度を規定する閾値に、好適なものを設定し、利用者の意図する処理を、より好適に実行することが可能な制御部310を備える。当該制御部310は、動作モードと、アーム部150の方向と、を検出し、設定された好適な閾値に基づいて、利用者の頭部動作に対応する各処理を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人体の動作を検出し、検出した動作に応じて処理を行う技術に関するものである。
【背景技術】
【0002】
利用者の眼前で画像を表示するヘッドマウントディスプレイ装置において、利用者の頭部の動きを検出して、特定の動きに応じて画像や映像に対する制御(再生開始、一時停止等)を行ったり、利用者の頭部動作に合わせて表示映像をスクロールさせたり、ヘッドホンの音場を動かして臨場感を向上させたりする技術が知られており、ヘッドマウントディスプレイ装置における利用者の頭部の動きの検出には、ジャイロセンサ(角速度センサ)や加速度センサ等のセンサが用いられる。
【0003】
これらのセンサを利用し、利用者の頭部動作を検出して、検出した動作に応じて特定の制御を実行するヘッドマウントディスプレイ装置が知られている(例えば、特許文献1参照)。
【0004】
【特許文献1】特開平2004−233909号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術では、センサで検出された検出値を特定の閾値と比較することで、利用者の頭部動作を検出しているが、この閾値については、ヘッドマウントディスプレイ装置の作動状況が変わった場合でも、同じ値を使用すると、利用者の操作性を著しく害する場合があった。
【0006】
そこで本発明では、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとすることで、利用者の操作性を高めることを目的とする。
【課題を解決するための手段】
【0007】
以上に記載した課題を解決するため、本発明は、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとする。
【0008】
例えば、本発明は、装置を装着している利用者の動きを検出する動き検出部と、前記動き検出部が検出した検出値に基づいて、利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御部と、を備える制御装置であって、前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすることを特徴とする。
【発明の効果】
【0009】
以上のように、本発明によれば、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとすることで、利用者の操作性を高めることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施するための最良の形態について、図面を参照して説明する。
【0011】
図1、図2に、本発明の第一の実施形態に係るヘッドマウントディスプレイ装置(以下、HMDと略記する)100を示す。図1は、本発明の第一の実施形態に係るHMD100の斜視図であり、図2は、本発明の第一の実施形態に係るHMD100の側面図である。
【0012】
図示するように、本実施形態に係るHMD100は、頭部装着帯110と、音声出力部120と、筐体130A、130Bと、支持部140と、アーム部150と、表示部160と、操作部170と、を備えている。
【0013】
頭部装着帯110は、その両端が相対向するように、湾曲した形状に形成されている。また、頭部装着帯110は、弾性を有する材質で形成されており、利用者の頭部に装着する際に、その両端に形成されているスピーカ121A、121B(これらを区別しない場合には、単に121と表記する)を利用者の頭部の内側方向に押圧することで、HMD100を利用者の頭部に着脱自在に装着することができるようにしている。
【0014】
頭部装着帯110の両端側には、筐体130A、130Bが連結されており、筐体130Aにはスピーカ121Aが、筐体130Bにはスピーカ121Bが、それぞれ設けられている。また、頭部装着帯110の内部には、スピーカ121A、121Bと、操作部170と、表示部160と、電源部180(図3参照)と、を電気的に連結するための信号線や、後述する筐体130Bに内蔵される電源部180から、電源を供給するための電力線等が配線されている。
【0015】
音声出力部120は、音声信号を音声に変換する。本実施形態では、スピーカ121A、121Bを有し、これらは利用者の両方の耳にあてがわれて使用されるいわゆるヘッドホン用のスピーカである。図1においては、向かって右側のスピーカ121Aが左耳用のスピーカ、向かって左側のスピーカ121Bが右耳用のスピーカとなっている。これらの左右の別については、利用者の操作によって、任意に決定することができるものとしても良い。また、電源部180から電源を供給するための電力線と、音声信号を供給する音声信号線が配線されている。
【0016】
筐体130A、130Bは、頭部装着帯110の長手方向両端側に設けられており、筐体130A、130Bの利用者の頭部側(相対向する側)の外壁面には、スピーカ121A、121Bがそれぞれ連結されている。本実施形態においては、筐体130Bには、制御装置300と、電源部180と、が内蔵されており、さらに、スピーカ121Bとは逆側の外壁面に、操作部170が設けられている。
【0017】
電源部180は、音声出力部120と、表示部160と、操作部170と、制御装置300と、に電力線で接続されている。筐体130Aの、スピーカ121Aとは逆側の外壁面に、HMD100の電源のオン、オフを切り替える、電源スイッチ(図示しない)が設けられている。
【0018】
電源部180と、制御装置300と、操作部170と、電源スイッチとは、筐体130A、130Bのどちらに配置されても良く、また、筐体130A、130Bが、スピーカ121A、121Bと一体となるような構成としても良い。
【0019】
支持部140は、筐体130Bに、アーム部150の一端側を回動自在に連結する。連結方法はどのようなものでも良い。よって、利用者は、スピーカ121Aと、121Bの左右が反転するようにHMD100を装着し、表示部160が眼前に配置されるよう、アーム部150を180度回動させて、使用することも可能である。このような構成により、利用者は、表示部160を左右いずれの眼前にも配置することが出来る。
【0020】
アーム部150は、頭部装着帯110を利用者の頭部に装着した際に、アーム部150の筐体130A側ではない他端側に取り付けられている表示部160が、利用者の眼前に位置するように、その長手方向において湾曲している。また、内部には、電源部180から、表示部160に電源を供給する電力線と、画像信号を供給する画像信号線と、が配線されている。
【0021】
表示部160は、アーム部150の先端に、利用者の視線に合わせて回動自在に連結されている。表示部160は、画像を表示する、表示デバイスとしてのLCD(Liquid Crystal Display)17(図12参照)と、表示された画像を拡大する光学系と、を備え、制御装置300から供給される画像信号に基づいて、画像を表示する。
【0022】
操作部170は、操作スイッチ171A、171B、171C、171D、171Eと、さらに図示しない電源スイッチと、を備えている。操作スイッチ171A、171B、171C、171D、171Eを介して、HMD100に関する機能、例えば、再生、停止、早送り、巻戻し、制御処理のキャンセル、音量の変更等の指示を入力することができるようにされている。なお、これらのスイッチを介して操作指示が入力されると、I/F部330を介して、制御部310に送信される。
【0023】
また、HMD100に関する操作が可能なリモコン(図示しない)を別途設けても良い。リモコンは無線又は有線によって、利用者が操作スイッチを見ながら操作することが可能である。また、リモコン内に制御装置300や、電源部180を内蔵しても良い。さらに、無線により操作を行う場合には、操作部170に、リモコン受信部172を設けるような構成としても良い。
【0024】
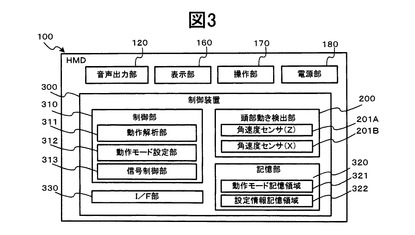
次に、本発明の第一の実施形態に係るHMD100について、図3を用いて説明する。図3は、HMD100の、機能的な構成を示すブロック図である。図示するように、HMD100は、音声出力部120と、表示部160と、操作部170と、電源部180と、制御装置300と、を備える。
【0025】
まず、制御装置300について説明する。制御装置300は、図3に示すように、頭部動き検出部200と、制御部310と、記憶部320と、I/F部330と、通信部340と、を有する。
【0026】
I/F部330は、音声出力部120と、表示部160と、操作部170と、電源部180と、を制御装置300に接続する。また、HMD100と、外部機器とをデータ転送可能に接続する汎用バスとして、USB(Universal Serial Bus)や、IEEE1394等の規格に準拠する端子を備える。さらに、I/F部330は、ネットワークに接続するための無線LANモジュール16や、Bluetooth(登録商標)等のデバイス間近距離無線通信、ワンセグ(登録商標)放送を受信可能なワンセグチューナ15を備えている(図12参照)。ワンセグ放送とは、地上デジタル放送の1チャンネルあたりの帯域(6MHz)を13のセグメントに分け、そのうちの1セグメントを利用して、テレビジョン番組、テキストデータ、静止画等を提供するものである。
【0027】
次に、頭部動き検出部200について説明する。頭部動き検出部200は、頭部の動きを検出する装置であり、角速度センサ(Z)201Aと、角速度センサ(X)201Bと(これらを区別しない場合には、単に201と表記する)、を備えている。頭部動き検出部200は、特定の基準軸から検出対象、すなわち利用者の頭部の動きに関する方向情報を、角速度として検出するものである。本発明の第一の実施形態に係る頭部動き検出部200においては、図1に示すように、垂直方向(利用者が直立する方向)をZ軸とし、Z軸と直交し利用者の一側面から他側面に向かう方向(スピーカ121A、121Bを貫通する方向)の軸をX軸とし、この2軸を基準軸として角速度の検出を実行する。
【0028】
角速度センサ201としては、筺体内のミラーやファイバーでレーザ光を周回させ、筺体が方向を変えると、内部で周回しているレーザの発光から受光のタイミングが変化することを利用した光学式ジャイロ、歳差を応用して、角速度変異を検出する機械式ジャイロ、振動(一次振動)する質量に角速度が加わると、コリオリ力でそれに直交する方向にも振動(二次振動)が発生することを利用した、振動式ジャイロ等を使用することができる。ここでは、角速度センサ(Z)201A、角速度センサ(X)201Bとして、圧電セラミックスを用いた、圧電振動ジャイロを用いることとする。
【0029】
角速度センサ(Z)201Aは、図1に示すように、ヨーイング(Yaw)方向の角速度、すなわち、Z軸回りの回転角の傾きであるヨー角を検出し、角速度センサ(X)201Bは、ピッチング(Pitch)方向の角速度、すなわち、X軸の回りの回転角の傾きであるピッチ角を検出する。このようなセンサによって、HMD100は、利用者の頭部の横振り動作と、縦振り動作とを検出することができる。本実施形態においては、角速度センサ201は所定の周期(例えば、50msec)毎にサンプリングを実行し、検出結果は角速度に比例するアナログ電圧値として出力される。出力された電圧値は、A/D変換器(図示しない)によってデジタル信号へ変換され、制御装置300の制御部310へと送信される。また、A/D変換器は、制御装置300が有するような構成としても良い。
【0030】
また、角速度センサ201の数は、上述のものに限られない。利用者が頭部をかしげる動きを検出するための、Y軸を基準軸とする角速度センサをさらに設けて、ロール角を検出できるような構成としても良く、また、1つの角速度センサによって、全ての角速度を検出できるようにしても良い。
【0031】
角速度センサ201の他にさらに加速度センサを設けても良く、角速度センサの代わりに加速度センサのみを持つような構成としても良い。
【0032】
以下、左右方向を示す角速度センサ(Z)201Aの電圧値から求められた角速度をAV(Z)、上下方向を示す角速度センサ(X)201Bの電圧値から求められた角速度をAV(X)とし、角速度AV(Z)の方向のうち、右方向をZ+、左方向をZ−、角速度AV(X)の方向のうち、上方向をX−、下方向をX+として説明する。
【0033】
記憶部320は、動作モード記憶領域321と、設定情報記憶領域322を有する。
【0034】
動作モード記憶領域321は、HMD100における動作モードを特定する情報を、動作モード情報として記憶する。
【0035】
ここで、動作モードとは、制御部310において実行されるコンテンツやアプリケーション等によって定められるHMD100の作動状況である。例えば、メニュー表示、音楽再生、動画再生、静止画表示、Web画面表示、TVの視聴、アプリケーションの再生等が挙げられる。
【0036】
設定情報記憶領域322は、設定情報テーブル700を記憶する。設定情報テーブル700は、動作モード種情報格納フィールド700aと、閾値情報格納フィールド700bと、対応処理情報格納フィールド700cと、を有する(図4参照)。
【0037】
動作モード種情報格納フィールド700aには、HMD100において実行される動作モードの種類を特定する情報が、動作モード種情報として格納されている。
【0038】
閾値情報格納フィールド700bには、動作モード種情報格納フィールド700aで特定される動作モードの種類毎に、所定の閾値と角速度との関係式が、閾値情報として格納されている。なお、図4においては、角速度をAVと表記している。
【0039】
対応処理情報格納フィールド700cには、閾値情報格納フィールド700bに格納される前記閾値情報で特定される閾値と角速度との関係を満たす場合に、実行される処理が、対応処理情報として格納されている。
【0040】
制御部310は、動作解析部311と、動作モード設定部312と、信号制御部313と、を備えている。
【0041】
動作解析部311は、角速度センサ(Z)201Aと、角速度センサ(X)201Bと、から送られる電圧値を受信すると、当該各電圧値と、予め生成された基準値とから、頭部動作の角速度AV(Z)と、AV(X)と、を算出する。そして、動作モード記憶領域321に記憶される動作モード情報を読み出して、設定情報テーブル700の、動作モード種情報格納フィールド700aに、前記読み出した動作モード情報と一致する情報が格納されるレコードを特定する。次に、特定されたレコードの中から、算出された角速度が、閾値情報格納フィールド700bに格納される閾値情報の関係式を満たすレコードを抽出して、抽出したレコードにおける対応処理情報格納フィールド700cに格納されている対応処理情報を取得する。
【0042】
例えば、図4に記載の設定情報テーブル700の例では、動作モードが静止画表示であり、算出された角速度AVが関係式Th1≦AVを満たす場合には、画面の切替処理が対応処理情報として取得される。また、動作モードが静止画表示であり、算出された角速度AVが関係式Th2<AV<Th1を満たす場合には、スクロール処理が対応処理情報として取得される。
【0043】
そして、動作解析部311は、取得した対応処理情報により特定される処理が、動作モード記憶領域321に記憶されている動作モード情報により特定される処理を変更するものである場合には、動作解析部311は、動作モード設定部312に、動作モードを対応処理情報で特定される処理に変更するよう要求する(動作モード変更要求)。
【0044】
動作モード設定部312は、動作解析部311より、動作モード変更要求を受け付けると、要求された動作モードへの変更処理を実行する。さらに、変更先の動作モードを検出して、動作モード記憶領域321に、変更先の動作モードを特定する情報を動作モード情報として格納する。また、操作部170を介して受け付けた動作モード変更指示についても、同様の処理を実行する。
【0045】
信号制御部313は、頭部動作に対応する制御信号、例えば、表示部160へ出力するための画像信号や、音声出力部120への出力するための音声信号等を生成、出力する。
【0046】
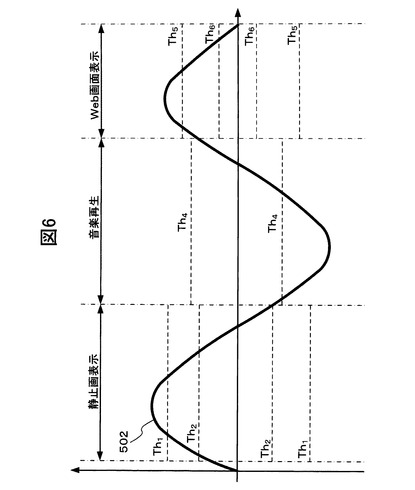
次に、制御部310が実行する処理について、図5−図7を用いて詳細に説明する。図5は、動作モードが静止画表示、および、メニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートであり、図6は、動作モードが静止画表示、音楽再生、Web画面表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【0047】
図5、図6に示すチャートにおいて、横軸は時間を、縦軸は角速度を示している。さらに、横軸より上側の座標は、頭部動作にすると下方向を、横軸より下側の座標は、頭部動作にすると上方向を示している。なお、このような態様に限定されず、例えば、横軸より上側の座標が右方向、横軸より下側の座標が左方向の角速度を示すものとしても良い。
【0048】
図5、図6において、実線501と、実線502とは、AV(X)(上下方向)、(AV(Z)(左右方向)でも良い)の角速度の経時変化を表している。従って、以降に説明する各々の閾値Thは、上下方向について定められる値として説明する。
【0049】
図5、図6において、動作モードが静止画表示である場合、利用者は頭部動作によって、画面のスクロール操作と、画面の切替操作と、を実行することが出来る。これらは、頭部動作の角速度と、その方向と、によって判断される。閾値Th1は、利用者が画面の切替操作を指示する場合に、閾値Th2は、利用者が画面のスクロール操作を指示する場合に必要な角速度であり、利用者の頭部動作の回転の速さを規定するために設けられている。
【0050】
さらに、第一の実施形態に係るHMD100においては、Th1はTh2よりも大きな値であり、画面の切替操作は、スクロール操作に比べて、頭部動作において大きな角速度が要求される。それぞれの閾値は、予め設定しておいても良いし、使用条件等によって、適宜変更が可能な構成としても良い。しかしながら、同方向の動作より異なる操作を識別するために、Th1の値と、Th2の値との差が小さい場合には、誤作動を招く可能性がある。従って、Th1の値と、Th2の値とは、利用者がその動作速度によって意図的に、画面切替操作と、スクロール操作と、の2種の操作を使い分けることが可能な範囲に設定されるのが望ましい。
【0051】
図5において、動作モードがメニュー表示である場合、利用者は、頭部動作によってメニューの決定操作を実行することが出来る。閾値Th3は、利用者がメニュー画面中の選択肢の決定操作を指示する場合に、必要とされる角速度である。
【0052】
第一の実施形態においては、動作モードがメニュー表示の場合には、利用者は頭部動作によって閾値Th3を用いた決定操作のみが実行可能である。従って、Th3の値は、Th1よりも小さく設定し、感度良く決定操作が可能な構成となっている。
【0053】
図6において、動作モードが音楽再生である場合、利用者は、頭部動作によって、音楽再生の決定操作を実行することが出来る。よって、閾値Th4は、利用者が音楽の再生を決定する操作を指示する場合に必要とされる角速度である。閾値Th4は、閾値Th3と同様に、Th1よりも小さく設定され、感度良く決定操作が可能な構成となっている。
【0054】
図6において、動作モードがWeb画面表示である場合、利用者は、頭部動作によって、決定操作と、画面のスクロール操作と、を実行することが出来る。これらは、頭部動作の角速度によって判断され、閾値Th5は、利用者がWeb画面に表示されるアイコン等を選択し、決定操作を指示する場合に、閾値Th6は、利用者がWeb画面のスクロール操作を指示する場合に、必要な角速度である。なお、一般にWeb画面は、静止画に比べて画面サイズが大きいため、Web画面表示のスクロール操作の回数は、静止画表示のスクロール操作の回数に比べて多くなる。このため、Web画面表示の閾値Th6を静止画表示の閾値Th2よりも小さく設定し、Web画面表示のスクロール操作を感度良く操作可能としている。
【0055】
第一の実施形態に係るHMD100においては、Th5はTh6よりも大きな値であり、処理の実行を決定する操作は、Web画面のスクロール操作に比べて、より頭部動作において大きな角速度が要求される。これらについても、利用者がその動作速度によって意図的に、決定操作と、スクロール操作と、の2種の操作を使い分けることが可能な範囲に閾値が設定されるのが望ましい。
【0056】
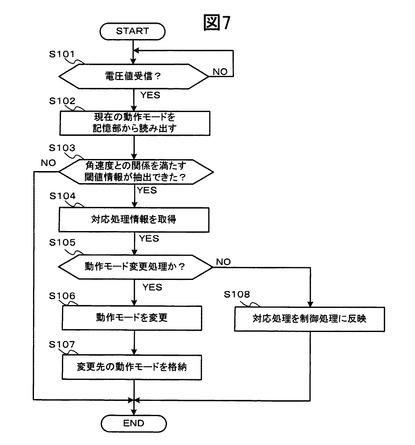
図7は、第一の実施形態に係るHMD100の制御部310が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【0057】
動作解析部311は、角速度センサ(Z)201Aと、角速度センサ(X)201Bと、から所定の周期(ここでは50msecとする)毎に検出・出力される電圧値を受け付ける(S101)。そして、動作解析部311は、受信した電圧値から、所定の基準値を減じて、頭部動作の真の変化量を算出し、角速度AV(Z)、AV(X)を求める。
【0058】
動作解析部311は、動作モード記憶領域321から、動作モード情報を読み出す(S102)。次に、動作解析部311は、設定情報テーブル700より、動作モード種情報格納フィールド700aに当該動作モード情報と一致する動作モード種情報が格納されているレコードを特定する。
【0059】
さらに、動作解析部311は、算出された角速度が、当該レコード中の閾値情報格納フィールド700bに格納される関係式を満たすレコードをさらに抽出する(S103)。角速度と閾値との関係式を満たすレコードが抽出できた場合には、ステップ104へ進み、抽出できなかった場合には、処理を終了する。
【0060】
次に、動作解析部311は、閾値情報格納フィールド700bの当該関係式に対応する対応処理情報を、対応処理情報格納フィールド700cより取得する(S104)。例えば、実行中の動作モードが静止画表示であり、角速度AV(Z)が、左右方向の何れかで閾値Th1を超過していた場合には、画面の切替処理が対応処理情報として特定される。
【0061】
そして、動作解析部311は、実行される対応処理が、動作モード記憶領域321に記憶されている動作モードと比較して、動作モードを変更する処理であるかどうかを、検出する(S105)。動作モードを変更する処理である場合には(YES)、動作解析部311は、取得した対応処理情報を動作モード設定部312に出力してステップ106へ進み、動作モードを変更する処理でない場合には(NO)、動作解析部311は、取得した対応処理情報と、角速度と、を信号制御部313へと出力して、ステップ108へと進む。
【0062】
ステップ108において、信号制御部313は、動作解析部311により出力された対応処理情報と、角速度と、を受け付けると、該角速度と、その角方向に基づいて、対応処理を実行するための制御信号を生成する。例えば、対応処理が画面のスクロール処理であった場合には、スクロールの方向や、距離等を指示するスクロール制御信号を生成する。そして、信号制御部313は、生成された制御信号を表示部160や、音声出力部120等に出力して、処理を終了する。
【0063】
ステップ106において、動作モード設定部312は、動作解析部311により出力された対応処理情報を受け付けると、対応処理情報から、変更先の動作モードを検出して、実行中の動作モードを、変更先の動作モードに変更する(S106)。そして、変更先の動作モードを特定する情報を、動作モード記憶領域321に動作モード情報として記憶して(S107)、処理を終了する。動作モードの変更処理は、例えば、変更先の動作モードがWeb画面表示であった場合には、ブラウザの起動処理を実行し、I/F部への通信開始要求と、信号制御部へブラウザを表示するための、制御信号の出力を要求することで実現可能である。
【0064】
以上のような構成により、本実施形態のHMD100は、動作モードが変更されると、該動作モードにおいて実行される処理に対応する、好適な閾値を設定することによって、利用者は操作性良く、処理の実行を指示することが可能である。
【0065】
もちろん動作モードは、上述のものに限定されない。上記以外のコンテンツの実行についても、それぞれ設定情報テーブル700に予め格納しておくことが可能である。また、予め格納された設定情報テーブル700が存在しないような動作モードである場合には、I/F部330を介して接続される外部機器や、ネットワーク等から、閾値情報や対応処理情報を取得するような構成としても良い。なお、各動作モードによって実行される処理についても、上述のものに限定されない。ゲームの操作等において使用される、その他の特殊な処理を実行することも出来る。
【0066】
また、特定の動作モード中に、特定の処理を実行する場合等にも、上記の技術を適用することが可能である。例えば、動作モードが動画再生中であれば、その停止と、動作モードが早送り中であれば、その停止と、を実行する閾値をそれぞれ異なるようにすることもできる。このような場合には、再生の停止に必要な角速度を定める閾値よりも、早送りの停止に必要な角速度を定める閾値を、小さく設定することによって、利用者は所望の位置での動画の停止操作をより容易に行うことができるようになる。即ち、動画の再生スピードよりも早送りのスピードの方が速いため、早送りを停止する指示を出す方の感度を高めることにより、所望の位置での停止指示を容易に出すことができるようになる。
【0067】
また、各閾値の値についても、上述のものに限定されない。それぞれの閾値は、予め設定しておいても良いし、使用条件等によって、適宜変更が可能な構成としても良い。例えば、動作モードに応じて、予め定められた閾値に所定の値を加算したり、減算したり、してもよい。
【0068】
ここで、HMD100のハードウェア構成について説明する。図12は、HMD100の電気的な構成を示すブロック図である。
【0069】
図12に示すように、HMD100は、各装置を集中的に制御するCPU(Central Processing Unit)11と、各種データを書換え可能に記憶するメモリ12と、各種のプログラム、プログラムの生成するデータ等を格納する不揮発性の補助メモリ13と、各デバイスとCPU11を接続するI/F部14と、を備える。制御部310は、例えば、補助メモリ13に記憶されている所定のプログラムを、メモリ12に読み込み、CPU11で実行することにより実現可能である。
【0070】
次に、本発明の第二の実施形態について説明する。ここでは、第二の実施形態であるHMD800について、第一の実施形態と比較して異なっている点に関連する事項を説明する。
【0071】
第二の実施形態に係るHMD800では、アーム部150の位置が、正位置にあるか、逆位置にあるかを検出し、各方向に好適な閾値を設定する。
【0072】
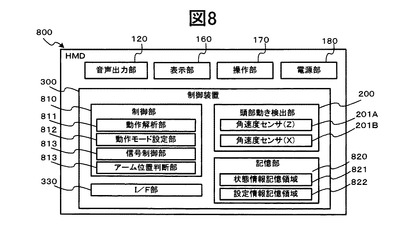
本発明の第二の実施形態に係るHMD800について、図8を用いて説明する。図8は、HMD800の、機能的な構成を示すブロック図である。
【0073】
記憶部820は、状態情報記憶領域821と、設定情報記憶領域822と、を有する。
【0074】
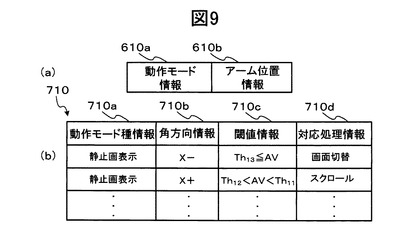
状態情報記憶領域821は、動作モード情報格納領域610aと、アーム位置情報格納領域610bと、を有する(図9(a)参照)。
【0075】
動作モード情報格納領域610aには、HMD800において実行されている動作モードを特定する情報が、動作モード情報として格納される。アーム位置情報格納領域610bには、アーム部150の位置が、正位置にあるか、逆位値にあるかを特定する情報が、アーム位置情報として格納される。アーム位置については後述する。
【0076】
設定情報記憶領域822は、設定情報テーブル710を記憶する。設定情報テーブル710は、動作モード種情報格納フィールド710aと、角方向情報格納フィールド710bと、閾値情報格納フィールド710cと、対応処理情報格納フィールド710dと、を有する(図9(b)参照)。
【0077】
動作モード種情報格納フィールド710aには、HMD800において実行される動作モードを特定する情報が、動作モード種情報として格納されている。
【0078】
角方向情報格納フィールド710bには、角速度の方向を示す情報、例えば、Z+(右方向)、Z−(左方向)、X−(上方向)、X+(下方向)が、角方向情報として格納されている(括弧内の方向は、全て正位置にアーム部150が配置されている場合の頭部動作の方向)。
【0079】
閾値情報格納フィールド710cには、前記動作モード種情報格納フィールド710aと、前記角方向情報格納フィールド710bに格納される情報に対応付けて、所定の閾値と、角速度と、の関係式が、閾値情報として格納されている。
【0080】
閾値情報における閾値は、同様の動作モードにおいて使用されるものであっても、上下左右の方向毎に異なる値が定められており、アーム部150の位置が正位置にある場合を基準として格納される。ここでは、上下左右のうち、頭部動作の容易な方向(例えば、下方向や右方向)には、それぞれの逆方向よりも大きな値の閾値が定められている。このような構成により、全ての方向で違和感無く操作を行うことが可能である。
【0081】
対応処理情報格納フィールド710dには、動作モードと、アーム部150の位置と、前記閾値情報の閾値と、検出される角速度と、の関係に基づいて実行される処理が、前記閾値情報格納フィールド710cに対応付けて格納されている。
【0082】
次に、制御部810について説明する。制御部810は、動作解析部811と、動作モード設定部812と、信号制御部813と、アーム位置判断部814と、を備えている。
【0083】
まず、アーム位置判断部814について説明する。アーム位置判断部814は、頭部装着帯110に対するアーム部150の方向、すなわち、表示部160が利用者の右左の眼の、どちらの眼前に位置しているかを判断する。アーム部150の方向は、利用者のHMD800の装着向きであり、正位置(スピーカ121Aが左耳、121Bが右耳に使用される場合)と、逆位値(スピーカ121Aが右耳、121Bが左耳に使用される場合)と、に分けて判断される。判断された方向は、アーム位置情報として、アーム位置情報格納領域610bに格納される。なお、アーム位置判断部814は、アーム部150の方向が切り替わる度に、アーム位置情報を更新し、表示部160の反転を、信号制御部813に要求する。
【0084】
アーム部150の方向の検出方法は、どのようなものでも良く、例えば、リミットスイッチ等の信号によって、判断することが可能である。
【0085】
動作解析部811は、速度AV(Z)と、AV(X)と、を算出し、アーム位置情報格納領域610bに格納される、アーム位置情報を読み出して、アーム部150の位置を取得する。そして、動作モード情報格納領域610aに格納される動作モード情報を読み出して、設定情報テーブル710の、動作モード種情報格納フィールド710aに、前記読み出した動作モード情報と一致する情報が格納されるレコードを特定する。次に、特定されたレコードの中から、角方向情報格納フィールド710bに、算出された角速度の角方向と、一致する角方向を特定する情報が格納されるレコードを抽出する。次に、抽出されたレコードの中から、さらに、算出された角速度が、当該レコード中の閾値情報格納フィールド710cに格納される閾値情報の関係式を満たすレコードを抽出して、抽出したレコードにおける対応処理情報格納フィールド710dに格納されている対応処理情報を取得する。
【0086】
閾値情報の関係式を満たすレコードの抽出は、動作モード情報格納領域610aから得られた動作モードと、検出された角速度の角方向と、の両条件を満たす閾値情報を検索することで実行される。その際、角方向がAV(X−)もしくはAV(+)であり、かつ、先にアーム位置情報格納領域610bより読み出したアーム位置が逆位値である場合には、算出した角速度の角方向とは、逆の角方向と対応付けられる閾値情報が格納されるレコードを取得する。これは、アーム方向の正逆によって、表示部160の上下と、角速度センサが検出する角速度の頭部動作の方向の上下と、が逆になることに起因する。すなわち、アーム方向が正位置と、逆位置とでは、AV(X−)(正位置:上方向、逆位置:下方向)と、AV(X+)(正位置:下方向、逆位置:上方向)が、入れ替わる。
【0087】
さらに、動作解析部811は、対応処理情報より処理を特定し、特定した処理が、状態情報記憶領域821に格納されている動作モード情報格納領域610aの動作モード情報により特定される処理を変更するものである場合には、動作解析部811は、動作モード設定部812に、動作モードを対応処理情報により特定される処理に変更するよう要求する。
【0088】
動作モード設定部812は、動作解析部811より、動作モード変更要求を受け付けると、要求された動作モードへの変更処理を実行する。さらに、対応処理情報から変更先の動作モードを検出して、動作モード情報格納領域610aに、変更先の動作モードを特定する情報を、動作モード情報として格納する。また、操作部170を介して受け付けた動作モード変更指示についても、同様の処理を実行する。
【0089】
信号制御部813は、頭部動作に対応する制御信号、例えば、表示部160へ出力するための画像信号や、音声出力部120への出力するための音声信号等を生成、出力する。また、アーム位置判断部814より、表示部160の反転要求を受け付けると、その後の表示部160への画像信号を反転させる。
【0090】
次に、制御部810が実行する処理について、図10−図11を用いて詳細に説明する。図10は、動作モードが静止画表示である際の、頭部動作の角速度の経時変化と、設定閾値と、を示すチャートである。
【0091】
図10に示すチャートにおいて、横軸は時間を、縦軸は角速度を示している。さらに、横軸より上側の座標は、頭部動作にすると下方向を、横軸より下側の座標は、頭部動作にすると上方向を示している。また、横軸より上側の座標が右方向、横軸より下側の座標が左方向の角速度を示すとしても良い。
【0092】
図10において、破線504は、AV(X)(上下方向)の角速度の経時変化を表している。
【0093】
図10において、動作モードが静止画表示である場合、第一の実施形態に係るHMD100と同様に、利用者は頭部動作によって、画面のスクロール操作と、画面の切替操作と、を実行することが可能である。
【0094】
図10において、アーム部150が、正位置にある場合、Th11の値は下方向への画面の切替操作に、Th12の値は下方向へのスクロール操作に必要な角速度AV(X+)の値であり、Th13の値は上方向への画面の切替操作に、Th14の値は上方向へのスクロール操作に必要な角速度AV(X−)の値である。
【0095】
上下のうち、頭部動作の容易な方向(ここでは、下方向)の閾値には、それぞれの逆方向よりも大きな値が定められている。もちろん、この値は使用条件等によって、適宜変更することが可能である。
【0096】
また、AV(X+)とAV(X−)の示す頭部動作の方向は、HMD800のアーム部150が、正位置にある場合と、逆位置にある場合とで入れ替わる。すなわち、アーム部150が、正位置にある場合、Th11の値は下方向への画面の切替操作に、Th12の値は下方向へのスクロール操作に必要な角速度AV(X−)の値であり、Th13の値は上方向への画面の切替操作に、Th14の値は上方向へのスクロール操作に必要な角速度AV(X+)の値となる。
【0097】
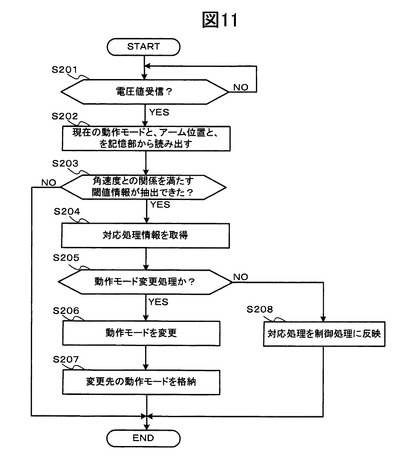
図11は、第二の実施形態に係るHMD800の制御部810が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【0098】
動作解析部811は、角速度センサ(Z)201Aと、角速度センサ(X)201Bとから所定の周期(ここでは50msecとする)毎に検出・出力される電圧値を受け付ける(S201)。そして、動作解析部811は、受信した電圧値から、所定の基準値を減じて、頭部動作の真の変化量を算出し、角速度AV(Z)、AV(X)を求める。以下、角速度AV(X)の処理について主に説明する。
【0099】
さらに、動作解析部811は、アーム位置情報格納領域610bから、アーム位置情報を読み出す。続いて、動作モード情報格納領域610aから、動作モード情報を読み出す(S202)。次に、動作解析部811は、設定情報テーブル710より、動作モード種情報格納フィールド710aに当該動作モード情報と一致する動作モード種情報が格納されているレコードを特定する。そして、角方向情報格納フィールド710bより、アーム位置が正位置の場合には、算出された角速度の角方向と、一致する角方向を特定する情報を、逆位置の場合には、算出した角速度の角方向とは、逆の角方向を特定する情報が格納されているレコードを抽出する。角速度AV(Z)については、正位置の場合でも、逆位置の場合でも、算出された角速度の角方向と一致する角方向を特定する情報が格納されているレコードを抽出する。
【0100】
次に、算出された角速度が、当該レコード中の閾値情報格納フィールド710cに格納される閾値情報の関係式を満たすレコードを、さらに抽出する(S203)。角速度と閾値との関係式を満たすレコードが抽出できた場合には、ステップ204へ進み、抽出できなかった場合には、処理を終了する。
【0101】
次に、動作解析部811は、閾値情報格納フィールド710cの当該関係式に対応する対応処理情報を、対応処理情報格納フィールド710dより取得する(S204)。
【0102】
そして、動作解析部811は、実行される対応処理が、動作モード情報格納領域610aに記憶されている動作モードと比較して、動作モードを変更する処理であるかどうかを、検出する(S205)。動作モードを変更する処理である場合には(YES)、動作解析部811は、取得した対応処理情報を動作モード設定部812に出力してステップ206へ進み、動作モードを変更する処理で無い場合には(NO)、動作解析部811は、取得した対応処理情報と、角速度と、アーム位置情報と、を信号制御部813へと出力して、ステップ208へと進む。
【0103】
ステップ208において、信号制御部813は、動作解析部811により出力された対応処理情報と、角速度と、アーム位置情報と、を受け付けると、対応処理を実行するための制御信号を生成する。その際に、アーム位置情報により影響を受ける操作、すなわち、AV(X+)もしくはAV(X−)方向に設定が必要な処理の場合には、アーム位置によって、その角方向を逆にする。例えば、対応処理が画面のスクロール処理であり、角速度がAV(X+)、アーム位置情報が逆位置の場合には、スクロール方向を角方向とは逆の、X−方向に設定し、さらに、角速度から、距離、速さ等を指示するスクロール制御信号を生成する。そして、信号制御部813は、生成された制御信号を表示部160や、音声出力部120等に出力して、処理を終了する。
【0104】
ステップ206において、動作モード設定部812は、動作解析部811により出力された対応処理情報を受け付けると、対応処理情報から、変更先の動作モードを検出して、実行中の動作モードを、変更先の動作モードに変更する(S206)。そして、変更先の動作モードを特定する情報を、動作モード情報格納領域610aに動作モード情報として記憶して(S207)、処理を終了する。
【0105】
ステップ205−ステップ208の処理は、前述した第一の実施形態に係るHMD100の制御部310が実行するステップ105−ステップ108の処理と同様であるので、説明を省略する。
【0106】
以上のような構成により、第二の実施形態に係るHMD800は、角速度の角方向である上下左右に、それぞれ別の閾値を設定することによって、利用者は違和感なく操作を実行することが可能である。また、アーム部150の方向が、どのような向きであったとしても、表示部160の上下と、検出された角速度の角方向の上下と、を入れ替えた処理を実行することによって、どちらの方向にアーム部150が配置されていたとしても、同様の操作性を保つことが出来る。
【0107】
また、以上に述べた実施形態における制御装置300の適用は、HMDに限られない。頭部検出部を備える他の装置についても、適用が可能である。
【図面の簡単な説明】
【0108】
【図1】本発明の第一の実施形態に係るHMD100の斜視図である。
【図2】本発明の第一の実施形態に係るHMD100の側面図である。
【図3】本発明の第一の実施形態に係るHMD100の機能的な構成を示すブロック図である。
【図4】本発明の第一の実施形態に係るHMD100の設定情報記憶領域322に記憶される、設定情報テーブル700の概略図である。
【図5】本発明の第一の実施形態に係るHMD100において、動作モードが静止画表示、および、メニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【図6】本発明の第一の実施形態係るHMD100において、動作モードがメニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【図7】本発明の第一の実施形態に係るHMD100の制御部310が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【図8】本発明の第二の実施形態に係るHMD800の機能的な構成を示すブロック図である。
【図9】(a)本発明の第二の実施形態に係るHMD800の状態情報記憶領域821に記憶される、状態情報の概略図である。(b)本発明の第二の実施形態に係るHMD800の設定情報記憶領域822に記憶される、設定情報テーブル710の概略図である。
【図10】発明の第二の実施形態に係るHMD800において、動作モードが静止画表示である際の、頭部動作の角速度AV(X)の経時変化と、設定閾値とを示すチャートである。
【図11】本発明の第二の実施形態に係る制御部810が、頭部動き検出部200から送信される電圧値を受信した際の処理を示すフローチャートである。
【図12】本発明の第一の実施形態に係るHMD100の電気的な構成を示すブロック図であるである。
【符号の説明】
【0109】
100、800:HMD、110:頭部装着帯、120:音声出力部、130A、130B:筐体、140:支持部、150:アーム部、160:表示部、170:操作部、171A、171B、171C、171D、171E:操作スイッチ、172:リモコン受信部、180:電源部、200:頭部動き検出部、300:制御装置、310、810:制御部、311・811:動作解析部、312・812:動作モード設定部、313・813:信号制御部、814:アーム位置判断部、320・820:記憶部、321:動作モード記憶領域、821:状態情報記憶領域、322・822:設定情報記憶領域、330:入出力インターフェース部。
【技術分野】
【0001】
本発明は、人体の動作を検出し、検出した動作に応じて処理を行う技術に関するものである。
【背景技術】
【0002】
利用者の眼前で画像を表示するヘッドマウントディスプレイ装置において、利用者の頭部の動きを検出して、特定の動きに応じて画像や映像に対する制御(再生開始、一時停止等)を行ったり、利用者の頭部動作に合わせて表示映像をスクロールさせたり、ヘッドホンの音場を動かして臨場感を向上させたりする技術が知られており、ヘッドマウントディスプレイ装置における利用者の頭部の動きの検出には、ジャイロセンサ(角速度センサ)や加速度センサ等のセンサが用いられる。
【0003】
これらのセンサを利用し、利用者の頭部動作を検出して、検出した動作に応じて特定の制御を実行するヘッドマウントディスプレイ装置が知られている(例えば、特許文献1参照)。
【0004】
【特許文献1】特開平2004−233909号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の技術では、センサで検出された検出値を特定の閾値と比較することで、利用者の頭部動作を検出しているが、この閾値については、ヘッドマウントディスプレイ装置の作動状況が変わった場合でも、同じ値を使用すると、利用者の操作性を著しく害する場合があった。
【0006】
そこで本発明では、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとすることで、利用者の操作性を高めることを目的とする。
【課題を解決するための手段】
【0007】
以上に記載した課題を解決するため、本発明は、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとする。
【0008】
例えば、本発明は、装置を装着している利用者の動きを検出する動き検出部と、前記動き検出部が検出した検出値に基づいて、利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御部と、を備える制御装置であって、前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすることを特徴とする。
【発明の効果】
【0009】
以上のように、本発明によれば、ヘッドマウントディスプレイ装置の作動状況に応じて、利用者の頭部動作を検出するための閾値を異なるものとすることで、利用者の操作性を高めることができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施するための最良の形態について、図面を参照して説明する。
【0011】
図1、図2に、本発明の第一の実施形態に係るヘッドマウントディスプレイ装置(以下、HMDと略記する)100を示す。図1は、本発明の第一の実施形態に係るHMD100の斜視図であり、図2は、本発明の第一の実施形態に係るHMD100の側面図である。
【0012】
図示するように、本実施形態に係るHMD100は、頭部装着帯110と、音声出力部120と、筐体130A、130Bと、支持部140と、アーム部150と、表示部160と、操作部170と、を備えている。
【0013】
頭部装着帯110は、その両端が相対向するように、湾曲した形状に形成されている。また、頭部装着帯110は、弾性を有する材質で形成されており、利用者の頭部に装着する際に、その両端に形成されているスピーカ121A、121B(これらを区別しない場合には、単に121と表記する)を利用者の頭部の内側方向に押圧することで、HMD100を利用者の頭部に着脱自在に装着することができるようにしている。
【0014】
頭部装着帯110の両端側には、筐体130A、130Bが連結されており、筐体130Aにはスピーカ121Aが、筐体130Bにはスピーカ121Bが、それぞれ設けられている。また、頭部装着帯110の内部には、スピーカ121A、121Bと、操作部170と、表示部160と、電源部180(図3参照)と、を電気的に連結するための信号線や、後述する筐体130Bに内蔵される電源部180から、電源を供給するための電力線等が配線されている。
【0015】
音声出力部120は、音声信号を音声に変換する。本実施形態では、スピーカ121A、121Bを有し、これらは利用者の両方の耳にあてがわれて使用されるいわゆるヘッドホン用のスピーカである。図1においては、向かって右側のスピーカ121Aが左耳用のスピーカ、向かって左側のスピーカ121Bが右耳用のスピーカとなっている。これらの左右の別については、利用者の操作によって、任意に決定することができるものとしても良い。また、電源部180から電源を供給するための電力線と、音声信号を供給する音声信号線が配線されている。
【0016】
筐体130A、130Bは、頭部装着帯110の長手方向両端側に設けられており、筐体130A、130Bの利用者の頭部側(相対向する側)の外壁面には、スピーカ121A、121Bがそれぞれ連結されている。本実施形態においては、筐体130Bには、制御装置300と、電源部180と、が内蔵されており、さらに、スピーカ121Bとは逆側の外壁面に、操作部170が設けられている。
【0017】
電源部180は、音声出力部120と、表示部160と、操作部170と、制御装置300と、に電力線で接続されている。筐体130Aの、スピーカ121Aとは逆側の外壁面に、HMD100の電源のオン、オフを切り替える、電源スイッチ(図示しない)が設けられている。
【0018】
電源部180と、制御装置300と、操作部170と、電源スイッチとは、筐体130A、130Bのどちらに配置されても良く、また、筐体130A、130Bが、スピーカ121A、121Bと一体となるような構成としても良い。
【0019】
支持部140は、筐体130Bに、アーム部150の一端側を回動自在に連結する。連結方法はどのようなものでも良い。よって、利用者は、スピーカ121Aと、121Bの左右が反転するようにHMD100を装着し、表示部160が眼前に配置されるよう、アーム部150を180度回動させて、使用することも可能である。このような構成により、利用者は、表示部160を左右いずれの眼前にも配置することが出来る。
【0020】
アーム部150は、頭部装着帯110を利用者の頭部に装着した際に、アーム部150の筐体130A側ではない他端側に取り付けられている表示部160が、利用者の眼前に位置するように、その長手方向において湾曲している。また、内部には、電源部180から、表示部160に電源を供給する電力線と、画像信号を供給する画像信号線と、が配線されている。
【0021】
表示部160は、アーム部150の先端に、利用者の視線に合わせて回動自在に連結されている。表示部160は、画像を表示する、表示デバイスとしてのLCD(Liquid Crystal Display)17(図12参照)と、表示された画像を拡大する光学系と、を備え、制御装置300から供給される画像信号に基づいて、画像を表示する。
【0022】
操作部170は、操作スイッチ171A、171B、171C、171D、171Eと、さらに図示しない電源スイッチと、を備えている。操作スイッチ171A、171B、171C、171D、171Eを介して、HMD100に関する機能、例えば、再生、停止、早送り、巻戻し、制御処理のキャンセル、音量の変更等の指示を入力することができるようにされている。なお、これらのスイッチを介して操作指示が入力されると、I/F部330を介して、制御部310に送信される。
【0023】
また、HMD100に関する操作が可能なリモコン(図示しない)を別途設けても良い。リモコンは無線又は有線によって、利用者が操作スイッチを見ながら操作することが可能である。また、リモコン内に制御装置300や、電源部180を内蔵しても良い。さらに、無線により操作を行う場合には、操作部170に、リモコン受信部172を設けるような構成としても良い。
【0024】
次に、本発明の第一の実施形態に係るHMD100について、図3を用いて説明する。図3は、HMD100の、機能的な構成を示すブロック図である。図示するように、HMD100は、音声出力部120と、表示部160と、操作部170と、電源部180と、制御装置300と、を備える。
【0025】
まず、制御装置300について説明する。制御装置300は、図3に示すように、頭部動き検出部200と、制御部310と、記憶部320と、I/F部330と、通信部340と、を有する。
【0026】
I/F部330は、音声出力部120と、表示部160と、操作部170と、電源部180と、を制御装置300に接続する。また、HMD100と、外部機器とをデータ転送可能に接続する汎用バスとして、USB(Universal Serial Bus)や、IEEE1394等の規格に準拠する端子を備える。さらに、I/F部330は、ネットワークに接続するための無線LANモジュール16や、Bluetooth(登録商標)等のデバイス間近距離無線通信、ワンセグ(登録商標)放送を受信可能なワンセグチューナ15を備えている(図12参照)。ワンセグ放送とは、地上デジタル放送の1チャンネルあたりの帯域(6MHz)を13のセグメントに分け、そのうちの1セグメントを利用して、テレビジョン番組、テキストデータ、静止画等を提供するものである。
【0027】
次に、頭部動き検出部200について説明する。頭部動き検出部200は、頭部の動きを検出する装置であり、角速度センサ(Z)201Aと、角速度センサ(X)201Bと(これらを区別しない場合には、単に201と表記する)、を備えている。頭部動き検出部200は、特定の基準軸から検出対象、すなわち利用者の頭部の動きに関する方向情報を、角速度として検出するものである。本発明の第一の実施形態に係る頭部動き検出部200においては、図1に示すように、垂直方向(利用者が直立する方向)をZ軸とし、Z軸と直交し利用者の一側面から他側面に向かう方向(スピーカ121A、121Bを貫通する方向)の軸をX軸とし、この2軸を基準軸として角速度の検出を実行する。
【0028】
角速度センサ201としては、筺体内のミラーやファイバーでレーザ光を周回させ、筺体が方向を変えると、内部で周回しているレーザの発光から受光のタイミングが変化することを利用した光学式ジャイロ、歳差を応用して、角速度変異を検出する機械式ジャイロ、振動(一次振動)する質量に角速度が加わると、コリオリ力でそれに直交する方向にも振動(二次振動)が発生することを利用した、振動式ジャイロ等を使用することができる。ここでは、角速度センサ(Z)201A、角速度センサ(X)201Bとして、圧電セラミックスを用いた、圧電振動ジャイロを用いることとする。
【0029】
角速度センサ(Z)201Aは、図1に示すように、ヨーイング(Yaw)方向の角速度、すなわち、Z軸回りの回転角の傾きであるヨー角を検出し、角速度センサ(X)201Bは、ピッチング(Pitch)方向の角速度、すなわち、X軸の回りの回転角の傾きであるピッチ角を検出する。このようなセンサによって、HMD100は、利用者の頭部の横振り動作と、縦振り動作とを検出することができる。本実施形態においては、角速度センサ201は所定の周期(例えば、50msec)毎にサンプリングを実行し、検出結果は角速度に比例するアナログ電圧値として出力される。出力された電圧値は、A/D変換器(図示しない)によってデジタル信号へ変換され、制御装置300の制御部310へと送信される。また、A/D変換器は、制御装置300が有するような構成としても良い。
【0030】
また、角速度センサ201の数は、上述のものに限られない。利用者が頭部をかしげる動きを検出するための、Y軸を基準軸とする角速度センサをさらに設けて、ロール角を検出できるような構成としても良く、また、1つの角速度センサによって、全ての角速度を検出できるようにしても良い。
【0031】
角速度センサ201の他にさらに加速度センサを設けても良く、角速度センサの代わりに加速度センサのみを持つような構成としても良い。
【0032】
以下、左右方向を示す角速度センサ(Z)201Aの電圧値から求められた角速度をAV(Z)、上下方向を示す角速度センサ(X)201Bの電圧値から求められた角速度をAV(X)とし、角速度AV(Z)の方向のうち、右方向をZ+、左方向をZ−、角速度AV(X)の方向のうち、上方向をX−、下方向をX+として説明する。
【0033】
記憶部320は、動作モード記憶領域321と、設定情報記憶領域322を有する。
【0034】
動作モード記憶領域321は、HMD100における動作モードを特定する情報を、動作モード情報として記憶する。
【0035】
ここで、動作モードとは、制御部310において実行されるコンテンツやアプリケーション等によって定められるHMD100の作動状況である。例えば、メニュー表示、音楽再生、動画再生、静止画表示、Web画面表示、TVの視聴、アプリケーションの再生等が挙げられる。
【0036】
設定情報記憶領域322は、設定情報テーブル700を記憶する。設定情報テーブル700は、動作モード種情報格納フィールド700aと、閾値情報格納フィールド700bと、対応処理情報格納フィールド700cと、を有する(図4参照)。
【0037】
動作モード種情報格納フィールド700aには、HMD100において実行される動作モードの種類を特定する情報が、動作モード種情報として格納されている。
【0038】
閾値情報格納フィールド700bには、動作モード種情報格納フィールド700aで特定される動作モードの種類毎に、所定の閾値と角速度との関係式が、閾値情報として格納されている。なお、図4においては、角速度をAVと表記している。
【0039】
対応処理情報格納フィールド700cには、閾値情報格納フィールド700bに格納される前記閾値情報で特定される閾値と角速度との関係を満たす場合に、実行される処理が、対応処理情報として格納されている。
【0040】
制御部310は、動作解析部311と、動作モード設定部312と、信号制御部313と、を備えている。
【0041】
動作解析部311は、角速度センサ(Z)201Aと、角速度センサ(X)201Bと、から送られる電圧値を受信すると、当該各電圧値と、予め生成された基準値とから、頭部動作の角速度AV(Z)と、AV(X)と、を算出する。そして、動作モード記憶領域321に記憶される動作モード情報を読み出して、設定情報テーブル700の、動作モード種情報格納フィールド700aに、前記読み出した動作モード情報と一致する情報が格納されるレコードを特定する。次に、特定されたレコードの中から、算出された角速度が、閾値情報格納フィールド700bに格納される閾値情報の関係式を満たすレコードを抽出して、抽出したレコードにおける対応処理情報格納フィールド700cに格納されている対応処理情報を取得する。
【0042】
例えば、図4に記載の設定情報テーブル700の例では、動作モードが静止画表示であり、算出された角速度AVが関係式Th1≦AVを満たす場合には、画面の切替処理が対応処理情報として取得される。また、動作モードが静止画表示であり、算出された角速度AVが関係式Th2<AV<Th1を満たす場合には、スクロール処理が対応処理情報として取得される。
【0043】
そして、動作解析部311は、取得した対応処理情報により特定される処理が、動作モード記憶領域321に記憶されている動作モード情報により特定される処理を変更するものである場合には、動作解析部311は、動作モード設定部312に、動作モードを対応処理情報で特定される処理に変更するよう要求する(動作モード変更要求)。
【0044】
動作モード設定部312は、動作解析部311より、動作モード変更要求を受け付けると、要求された動作モードへの変更処理を実行する。さらに、変更先の動作モードを検出して、動作モード記憶領域321に、変更先の動作モードを特定する情報を動作モード情報として格納する。また、操作部170を介して受け付けた動作モード変更指示についても、同様の処理を実行する。
【0045】
信号制御部313は、頭部動作に対応する制御信号、例えば、表示部160へ出力するための画像信号や、音声出力部120への出力するための音声信号等を生成、出力する。
【0046】
次に、制御部310が実行する処理について、図5−図7を用いて詳細に説明する。図5は、動作モードが静止画表示、および、メニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートであり、図6は、動作モードが静止画表示、音楽再生、Web画面表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【0047】
図5、図6に示すチャートにおいて、横軸は時間を、縦軸は角速度を示している。さらに、横軸より上側の座標は、頭部動作にすると下方向を、横軸より下側の座標は、頭部動作にすると上方向を示している。なお、このような態様に限定されず、例えば、横軸より上側の座標が右方向、横軸より下側の座標が左方向の角速度を示すものとしても良い。
【0048】
図5、図6において、実線501と、実線502とは、AV(X)(上下方向)、(AV(Z)(左右方向)でも良い)の角速度の経時変化を表している。従って、以降に説明する各々の閾値Thは、上下方向について定められる値として説明する。
【0049】
図5、図6において、動作モードが静止画表示である場合、利用者は頭部動作によって、画面のスクロール操作と、画面の切替操作と、を実行することが出来る。これらは、頭部動作の角速度と、その方向と、によって判断される。閾値Th1は、利用者が画面の切替操作を指示する場合に、閾値Th2は、利用者が画面のスクロール操作を指示する場合に必要な角速度であり、利用者の頭部動作の回転の速さを規定するために設けられている。
【0050】
さらに、第一の実施形態に係るHMD100においては、Th1はTh2よりも大きな値であり、画面の切替操作は、スクロール操作に比べて、頭部動作において大きな角速度が要求される。それぞれの閾値は、予め設定しておいても良いし、使用条件等によって、適宜変更が可能な構成としても良い。しかしながら、同方向の動作より異なる操作を識別するために、Th1の値と、Th2の値との差が小さい場合には、誤作動を招く可能性がある。従って、Th1の値と、Th2の値とは、利用者がその動作速度によって意図的に、画面切替操作と、スクロール操作と、の2種の操作を使い分けることが可能な範囲に設定されるのが望ましい。
【0051】
図5において、動作モードがメニュー表示である場合、利用者は、頭部動作によってメニューの決定操作を実行することが出来る。閾値Th3は、利用者がメニュー画面中の選択肢の決定操作を指示する場合に、必要とされる角速度である。
【0052】
第一の実施形態においては、動作モードがメニュー表示の場合には、利用者は頭部動作によって閾値Th3を用いた決定操作のみが実行可能である。従って、Th3の値は、Th1よりも小さく設定し、感度良く決定操作が可能な構成となっている。
【0053】
図6において、動作モードが音楽再生である場合、利用者は、頭部動作によって、音楽再生の決定操作を実行することが出来る。よって、閾値Th4は、利用者が音楽の再生を決定する操作を指示する場合に必要とされる角速度である。閾値Th4は、閾値Th3と同様に、Th1よりも小さく設定され、感度良く決定操作が可能な構成となっている。
【0054】
図6において、動作モードがWeb画面表示である場合、利用者は、頭部動作によって、決定操作と、画面のスクロール操作と、を実行することが出来る。これらは、頭部動作の角速度によって判断され、閾値Th5は、利用者がWeb画面に表示されるアイコン等を選択し、決定操作を指示する場合に、閾値Th6は、利用者がWeb画面のスクロール操作を指示する場合に、必要な角速度である。なお、一般にWeb画面は、静止画に比べて画面サイズが大きいため、Web画面表示のスクロール操作の回数は、静止画表示のスクロール操作の回数に比べて多くなる。このため、Web画面表示の閾値Th6を静止画表示の閾値Th2よりも小さく設定し、Web画面表示のスクロール操作を感度良く操作可能としている。
【0055】
第一の実施形態に係るHMD100においては、Th5はTh6よりも大きな値であり、処理の実行を決定する操作は、Web画面のスクロール操作に比べて、より頭部動作において大きな角速度が要求される。これらについても、利用者がその動作速度によって意図的に、決定操作と、スクロール操作と、の2種の操作を使い分けることが可能な範囲に閾値が設定されるのが望ましい。
【0056】
図7は、第一の実施形態に係るHMD100の制御部310が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【0057】
動作解析部311は、角速度センサ(Z)201Aと、角速度センサ(X)201Bと、から所定の周期(ここでは50msecとする)毎に検出・出力される電圧値を受け付ける(S101)。そして、動作解析部311は、受信した電圧値から、所定の基準値を減じて、頭部動作の真の変化量を算出し、角速度AV(Z)、AV(X)を求める。
【0058】
動作解析部311は、動作モード記憶領域321から、動作モード情報を読み出す(S102)。次に、動作解析部311は、設定情報テーブル700より、動作モード種情報格納フィールド700aに当該動作モード情報と一致する動作モード種情報が格納されているレコードを特定する。
【0059】
さらに、動作解析部311は、算出された角速度が、当該レコード中の閾値情報格納フィールド700bに格納される関係式を満たすレコードをさらに抽出する(S103)。角速度と閾値との関係式を満たすレコードが抽出できた場合には、ステップ104へ進み、抽出できなかった場合には、処理を終了する。
【0060】
次に、動作解析部311は、閾値情報格納フィールド700bの当該関係式に対応する対応処理情報を、対応処理情報格納フィールド700cより取得する(S104)。例えば、実行中の動作モードが静止画表示であり、角速度AV(Z)が、左右方向の何れかで閾値Th1を超過していた場合には、画面の切替処理が対応処理情報として特定される。
【0061】
そして、動作解析部311は、実行される対応処理が、動作モード記憶領域321に記憶されている動作モードと比較して、動作モードを変更する処理であるかどうかを、検出する(S105)。動作モードを変更する処理である場合には(YES)、動作解析部311は、取得した対応処理情報を動作モード設定部312に出力してステップ106へ進み、動作モードを変更する処理でない場合には(NO)、動作解析部311は、取得した対応処理情報と、角速度と、を信号制御部313へと出力して、ステップ108へと進む。
【0062】
ステップ108において、信号制御部313は、動作解析部311により出力された対応処理情報と、角速度と、を受け付けると、該角速度と、その角方向に基づいて、対応処理を実行するための制御信号を生成する。例えば、対応処理が画面のスクロール処理であった場合には、スクロールの方向や、距離等を指示するスクロール制御信号を生成する。そして、信号制御部313は、生成された制御信号を表示部160や、音声出力部120等に出力して、処理を終了する。
【0063】
ステップ106において、動作モード設定部312は、動作解析部311により出力された対応処理情報を受け付けると、対応処理情報から、変更先の動作モードを検出して、実行中の動作モードを、変更先の動作モードに変更する(S106)。そして、変更先の動作モードを特定する情報を、動作モード記憶領域321に動作モード情報として記憶して(S107)、処理を終了する。動作モードの変更処理は、例えば、変更先の動作モードがWeb画面表示であった場合には、ブラウザの起動処理を実行し、I/F部への通信開始要求と、信号制御部へブラウザを表示するための、制御信号の出力を要求することで実現可能である。
【0064】
以上のような構成により、本実施形態のHMD100は、動作モードが変更されると、該動作モードにおいて実行される処理に対応する、好適な閾値を設定することによって、利用者は操作性良く、処理の実行を指示することが可能である。
【0065】
もちろん動作モードは、上述のものに限定されない。上記以外のコンテンツの実行についても、それぞれ設定情報テーブル700に予め格納しておくことが可能である。また、予め格納された設定情報テーブル700が存在しないような動作モードである場合には、I/F部330を介して接続される外部機器や、ネットワーク等から、閾値情報や対応処理情報を取得するような構成としても良い。なお、各動作モードによって実行される処理についても、上述のものに限定されない。ゲームの操作等において使用される、その他の特殊な処理を実行することも出来る。
【0066】
また、特定の動作モード中に、特定の処理を実行する場合等にも、上記の技術を適用することが可能である。例えば、動作モードが動画再生中であれば、その停止と、動作モードが早送り中であれば、その停止と、を実行する閾値をそれぞれ異なるようにすることもできる。このような場合には、再生の停止に必要な角速度を定める閾値よりも、早送りの停止に必要な角速度を定める閾値を、小さく設定することによって、利用者は所望の位置での動画の停止操作をより容易に行うことができるようになる。即ち、動画の再生スピードよりも早送りのスピードの方が速いため、早送りを停止する指示を出す方の感度を高めることにより、所望の位置での停止指示を容易に出すことができるようになる。
【0067】
また、各閾値の値についても、上述のものに限定されない。それぞれの閾値は、予め設定しておいても良いし、使用条件等によって、適宜変更が可能な構成としても良い。例えば、動作モードに応じて、予め定められた閾値に所定の値を加算したり、減算したり、してもよい。
【0068】
ここで、HMD100のハードウェア構成について説明する。図12は、HMD100の電気的な構成を示すブロック図である。
【0069】
図12に示すように、HMD100は、各装置を集中的に制御するCPU(Central Processing Unit)11と、各種データを書換え可能に記憶するメモリ12と、各種のプログラム、プログラムの生成するデータ等を格納する不揮発性の補助メモリ13と、各デバイスとCPU11を接続するI/F部14と、を備える。制御部310は、例えば、補助メモリ13に記憶されている所定のプログラムを、メモリ12に読み込み、CPU11で実行することにより実現可能である。
【0070】
次に、本発明の第二の実施形態について説明する。ここでは、第二の実施形態であるHMD800について、第一の実施形態と比較して異なっている点に関連する事項を説明する。
【0071】
第二の実施形態に係るHMD800では、アーム部150の位置が、正位置にあるか、逆位置にあるかを検出し、各方向に好適な閾値を設定する。
【0072】
本発明の第二の実施形態に係るHMD800について、図8を用いて説明する。図8は、HMD800の、機能的な構成を示すブロック図である。
【0073】
記憶部820は、状態情報記憶領域821と、設定情報記憶領域822と、を有する。
【0074】
状態情報記憶領域821は、動作モード情報格納領域610aと、アーム位置情報格納領域610bと、を有する(図9(a)参照)。
【0075】
動作モード情報格納領域610aには、HMD800において実行されている動作モードを特定する情報が、動作モード情報として格納される。アーム位置情報格納領域610bには、アーム部150の位置が、正位置にあるか、逆位値にあるかを特定する情報が、アーム位置情報として格納される。アーム位置については後述する。
【0076】
設定情報記憶領域822は、設定情報テーブル710を記憶する。設定情報テーブル710は、動作モード種情報格納フィールド710aと、角方向情報格納フィールド710bと、閾値情報格納フィールド710cと、対応処理情報格納フィールド710dと、を有する(図9(b)参照)。
【0077】
動作モード種情報格納フィールド710aには、HMD800において実行される動作モードを特定する情報が、動作モード種情報として格納されている。
【0078】
角方向情報格納フィールド710bには、角速度の方向を示す情報、例えば、Z+(右方向)、Z−(左方向)、X−(上方向)、X+(下方向)が、角方向情報として格納されている(括弧内の方向は、全て正位置にアーム部150が配置されている場合の頭部動作の方向)。
【0079】
閾値情報格納フィールド710cには、前記動作モード種情報格納フィールド710aと、前記角方向情報格納フィールド710bに格納される情報に対応付けて、所定の閾値と、角速度と、の関係式が、閾値情報として格納されている。
【0080】
閾値情報における閾値は、同様の動作モードにおいて使用されるものであっても、上下左右の方向毎に異なる値が定められており、アーム部150の位置が正位置にある場合を基準として格納される。ここでは、上下左右のうち、頭部動作の容易な方向(例えば、下方向や右方向)には、それぞれの逆方向よりも大きな値の閾値が定められている。このような構成により、全ての方向で違和感無く操作を行うことが可能である。
【0081】
対応処理情報格納フィールド710dには、動作モードと、アーム部150の位置と、前記閾値情報の閾値と、検出される角速度と、の関係に基づいて実行される処理が、前記閾値情報格納フィールド710cに対応付けて格納されている。
【0082】
次に、制御部810について説明する。制御部810は、動作解析部811と、動作モード設定部812と、信号制御部813と、アーム位置判断部814と、を備えている。
【0083】
まず、アーム位置判断部814について説明する。アーム位置判断部814は、頭部装着帯110に対するアーム部150の方向、すなわち、表示部160が利用者の右左の眼の、どちらの眼前に位置しているかを判断する。アーム部150の方向は、利用者のHMD800の装着向きであり、正位置(スピーカ121Aが左耳、121Bが右耳に使用される場合)と、逆位値(スピーカ121Aが右耳、121Bが左耳に使用される場合)と、に分けて判断される。判断された方向は、アーム位置情報として、アーム位置情報格納領域610bに格納される。なお、アーム位置判断部814は、アーム部150の方向が切り替わる度に、アーム位置情報を更新し、表示部160の反転を、信号制御部813に要求する。
【0084】
アーム部150の方向の検出方法は、どのようなものでも良く、例えば、リミットスイッチ等の信号によって、判断することが可能である。
【0085】
動作解析部811は、速度AV(Z)と、AV(X)と、を算出し、アーム位置情報格納領域610bに格納される、アーム位置情報を読み出して、アーム部150の位置を取得する。そして、動作モード情報格納領域610aに格納される動作モード情報を読み出して、設定情報テーブル710の、動作モード種情報格納フィールド710aに、前記読み出した動作モード情報と一致する情報が格納されるレコードを特定する。次に、特定されたレコードの中から、角方向情報格納フィールド710bに、算出された角速度の角方向と、一致する角方向を特定する情報が格納されるレコードを抽出する。次に、抽出されたレコードの中から、さらに、算出された角速度が、当該レコード中の閾値情報格納フィールド710cに格納される閾値情報の関係式を満たすレコードを抽出して、抽出したレコードにおける対応処理情報格納フィールド710dに格納されている対応処理情報を取得する。
【0086】
閾値情報の関係式を満たすレコードの抽出は、動作モード情報格納領域610aから得られた動作モードと、検出された角速度の角方向と、の両条件を満たす閾値情報を検索することで実行される。その際、角方向がAV(X−)もしくはAV(+)であり、かつ、先にアーム位置情報格納領域610bより読み出したアーム位置が逆位値である場合には、算出した角速度の角方向とは、逆の角方向と対応付けられる閾値情報が格納されるレコードを取得する。これは、アーム方向の正逆によって、表示部160の上下と、角速度センサが検出する角速度の頭部動作の方向の上下と、が逆になることに起因する。すなわち、アーム方向が正位置と、逆位置とでは、AV(X−)(正位置:上方向、逆位置:下方向)と、AV(X+)(正位置:下方向、逆位置:上方向)が、入れ替わる。
【0087】
さらに、動作解析部811は、対応処理情報より処理を特定し、特定した処理が、状態情報記憶領域821に格納されている動作モード情報格納領域610aの動作モード情報により特定される処理を変更するものである場合には、動作解析部811は、動作モード設定部812に、動作モードを対応処理情報により特定される処理に変更するよう要求する。
【0088】
動作モード設定部812は、動作解析部811より、動作モード変更要求を受け付けると、要求された動作モードへの変更処理を実行する。さらに、対応処理情報から変更先の動作モードを検出して、動作モード情報格納領域610aに、変更先の動作モードを特定する情報を、動作モード情報として格納する。また、操作部170を介して受け付けた動作モード変更指示についても、同様の処理を実行する。
【0089】
信号制御部813は、頭部動作に対応する制御信号、例えば、表示部160へ出力するための画像信号や、音声出力部120への出力するための音声信号等を生成、出力する。また、アーム位置判断部814より、表示部160の反転要求を受け付けると、その後の表示部160への画像信号を反転させる。
【0090】
次に、制御部810が実行する処理について、図10−図11を用いて詳細に説明する。図10は、動作モードが静止画表示である際の、頭部動作の角速度の経時変化と、設定閾値と、を示すチャートである。
【0091】
図10に示すチャートにおいて、横軸は時間を、縦軸は角速度を示している。さらに、横軸より上側の座標は、頭部動作にすると下方向を、横軸より下側の座標は、頭部動作にすると上方向を示している。また、横軸より上側の座標が右方向、横軸より下側の座標が左方向の角速度を示すとしても良い。
【0092】
図10において、破線504は、AV(X)(上下方向)の角速度の経時変化を表している。
【0093】
図10において、動作モードが静止画表示である場合、第一の実施形態に係るHMD100と同様に、利用者は頭部動作によって、画面のスクロール操作と、画面の切替操作と、を実行することが可能である。
【0094】
図10において、アーム部150が、正位置にある場合、Th11の値は下方向への画面の切替操作に、Th12の値は下方向へのスクロール操作に必要な角速度AV(X+)の値であり、Th13の値は上方向への画面の切替操作に、Th14の値は上方向へのスクロール操作に必要な角速度AV(X−)の値である。
【0095】
上下のうち、頭部動作の容易な方向(ここでは、下方向)の閾値には、それぞれの逆方向よりも大きな値が定められている。もちろん、この値は使用条件等によって、適宜変更することが可能である。
【0096】
また、AV(X+)とAV(X−)の示す頭部動作の方向は、HMD800のアーム部150が、正位置にある場合と、逆位置にある場合とで入れ替わる。すなわち、アーム部150が、正位置にある場合、Th11の値は下方向への画面の切替操作に、Th12の値は下方向へのスクロール操作に必要な角速度AV(X−)の値であり、Th13の値は上方向への画面の切替操作に、Th14の値は上方向へのスクロール操作に必要な角速度AV(X+)の値となる。
【0097】
図11は、第二の実施形態に係るHMD800の制御部810が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【0098】
動作解析部811は、角速度センサ(Z)201Aと、角速度センサ(X)201Bとから所定の周期(ここでは50msecとする)毎に検出・出力される電圧値を受け付ける(S201)。そして、動作解析部811は、受信した電圧値から、所定の基準値を減じて、頭部動作の真の変化量を算出し、角速度AV(Z)、AV(X)を求める。以下、角速度AV(X)の処理について主に説明する。
【0099】
さらに、動作解析部811は、アーム位置情報格納領域610bから、アーム位置情報を読み出す。続いて、動作モード情報格納領域610aから、動作モード情報を読み出す(S202)。次に、動作解析部811は、設定情報テーブル710より、動作モード種情報格納フィールド710aに当該動作モード情報と一致する動作モード種情報が格納されているレコードを特定する。そして、角方向情報格納フィールド710bより、アーム位置が正位置の場合には、算出された角速度の角方向と、一致する角方向を特定する情報を、逆位置の場合には、算出した角速度の角方向とは、逆の角方向を特定する情報が格納されているレコードを抽出する。角速度AV(Z)については、正位置の場合でも、逆位置の場合でも、算出された角速度の角方向と一致する角方向を特定する情報が格納されているレコードを抽出する。
【0100】
次に、算出された角速度が、当該レコード中の閾値情報格納フィールド710cに格納される閾値情報の関係式を満たすレコードを、さらに抽出する(S203)。角速度と閾値との関係式を満たすレコードが抽出できた場合には、ステップ204へ進み、抽出できなかった場合には、処理を終了する。
【0101】
次に、動作解析部811は、閾値情報格納フィールド710cの当該関係式に対応する対応処理情報を、対応処理情報格納フィールド710dより取得する(S204)。
【0102】
そして、動作解析部811は、実行される対応処理が、動作モード情報格納領域610aに記憶されている動作モードと比較して、動作モードを変更する処理であるかどうかを、検出する(S205)。動作モードを変更する処理である場合には(YES)、動作解析部811は、取得した対応処理情報を動作モード設定部812に出力してステップ206へ進み、動作モードを変更する処理で無い場合には(NO)、動作解析部811は、取得した対応処理情報と、角速度と、アーム位置情報と、を信号制御部813へと出力して、ステップ208へと進む。
【0103】
ステップ208において、信号制御部813は、動作解析部811により出力された対応処理情報と、角速度と、アーム位置情報と、を受け付けると、対応処理を実行するための制御信号を生成する。その際に、アーム位置情報により影響を受ける操作、すなわち、AV(X+)もしくはAV(X−)方向に設定が必要な処理の場合には、アーム位置によって、その角方向を逆にする。例えば、対応処理が画面のスクロール処理であり、角速度がAV(X+)、アーム位置情報が逆位置の場合には、スクロール方向を角方向とは逆の、X−方向に設定し、さらに、角速度から、距離、速さ等を指示するスクロール制御信号を生成する。そして、信号制御部813は、生成された制御信号を表示部160や、音声出力部120等に出力して、処理を終了する。
【0104】
ステップ206において、動作モード設定部812は、動作解析部811により出力された対応処理情報を受け付けると、対応処理情報から、変更先の動作モードを検出して、実行中の動作モードを、変更先の動作モードに変更する(S206)。そして、変更先の動作モードを特定する情報を、動作モード情報格納領域610aに動作モード情報として記憶して(S207)、処理を終了する。
【0105】
ステップ205−ステップ208の処理は、前述した第一の実施形態に係るHMD100の制御部310が実行するステップ105−ステップ108の処理と同様であるので、説明を省略する。
【0106】
以上のような構成により、第二の実施形態に係るHMD800は、角速度の角方向である上下左右に、それぞれ別の閾値を設定することによって、利用者は違和感なく操作を実行することが可能である。また、アーム部150の方向が、どのような向きであったとしても、表示部160の上下と、検出された角速度の角方向の上下と、を入れ替えた処理を実行することによって、どちらの方向にアーム部150が配置されていたとしても、同様の操作性を保つことが出来る。
【0107】
また、以上に述べた実施形態における制御装置300の適用は、HMDに限られない。頭部検出部を備える他の装置についても、適用が可能である。
【図面の簡単な説明】
【0108】
【図1】本発明の第一の実施形態に係るHMD100の斜視図である。
【図2】本発明の第一の実施形態に係るHMD100の側面図である。
【図3】本発明の第一の実施形態に係るHMD100の機能的な構成を示すブロック図である。
【図4】本発明の第一の実施形態に係るHMD100の設定情報記憶領域322に記憶される、設定情報テーブル700の概略図である。
【図5】本発明の第一の実施形態に係るHMD100において、動作モードが静止画表示、および、メニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【図6】本発明の第一の実施形態係るHMD100において、動作モードがメニュー表示である際の、頭部動作の角速度の経時変化と、設定閾値とを示すチャートである。
【図7】本発明の第一の実施形態に係るHMD100の制御部310が、頭部動き検出部200から送られる電圧値を受信した際の処理を示すフローチャートである。
【図8】本発明の第二の実施形態に係るHMD800の機能的な構成を示すブロック図である。
【図9】(a)本発明の第二の実施形態に係るHMD800の状態情報記憶領域821に記憶される、状態情報の概略図である。(b)本発明の第二の実施形態に係るHMD800の設定情報記憶領域822に記憶される、設定情報テーブル710の概略図である。
【図10】発明の第二の実施形態に係るHMD800において、動作モードが静止画表示である際の、頭部動作の角速度AV(X)の経時変化と、設定閾値とを示すチャートである。
【図11】本発明の第二の実施形態に係る制御部810が、頭部動き検出部200から送信される電圧値を受信した際の処理を示すフローチャートである。
【図12】本発明の第一の実施形態に係るHMD100の電気的な構成を示すブロック図であるである。
【符号の説明】
【0109】
100、800:HMD、110:頭部装着帯、120:音声出力部、130A、130B:筐体、140:支持部、150:アーム部、160:表示部、170:操作部、171A、171B、171C、171D、171E:操作スイッチ、172:リモコン受信部、180:電源部、200:頭部動き検出部、300:制御装置、310、810:制御部、311・811:動作解析部、312・812:動作モード設定部、313・813:信号制御部、814:アーム位置判断部、320・820:記憶部、321:動作モード記憶領域、821:状態情報記憶領域、322・822:設定情報記憶領域、330:入出力インターフェース部。
【特許請求の範囲】
【請求項1】
装置を装着している利用者の動きを検出する動き検出部と、
前記動き検出部が検出した検出値に基づいて、利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御部と、を備える制御装置であって、
前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とする制御装置。
【請求項2】
請求項1に記載の制御装置であって、
前記制御部は、
特定の方向における前記利用者の動作の速度が、閾値に対して特定の関係にある場合に、所定の処理を実行するようにされており、
前記閾値は、前記作動状況において異なるものであること
を特徴とする制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記閾値は、前記特定の方向毎に値が定められていること
を特徴とする制御装置。
【請求項4】
請求項1から3のいずれか一項に記載の制御装置であって、
前記利用者の動作は、利用者の頭部の動作であること、
を特徴とする制御装置。
【請求項5】
請求項1から4のいずれか一項に記載の制御装置を備えることを特徴とするヘッドマウントディスプレイ装置。
【請求項6】
請求項5に記載のヘッドマウントディスプレイ装置であって、
前記利用者の装着向きを検出する装着方向検出部をさらに備え、
前記制御部は、
前記利用者の装着向きに応じて、異なる閾値を用いて処理を行うこと
を特徴とするヘッドマウントディスプレイ装置。
【請求項7】
コンピュータを、
装置を装着している利用者の動きを検出する検出手段における検出値により利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御手段、
として機能させるプログラムであって、
前記制御手段は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とするプログラム。
【請求項8】
動き検出部と、制御部と、を備える制御装置が行う制御方法であって、
前記動き検出部が、利用者の動きを検出する動き検出過程と、
前記制御部が、前記動き検出過程において検出された検出値に基づいて、利用者の動作を検出する動作検知過程と、
前記制御部が、前記動作検知過程において検出した利用者の動作に応じた処理を行う制御過程と、を備え、
前記制御過程では、前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とする制御方法。
【請求項1】
装置を装着している利用者の動きを検出する動き検出部と、
前記動き検出部が検出した検出値に基づいて、利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御部と、を備える制御装置であって、
前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とする制御装置。
【請求項2】
請求項1に記載の制御装置であって、
前記制御部は、
特定の方向における前記利用者の動作の速度が、閾値に対して特定の関係にある場合に、所定の処理を実行するようにされており、
前記閾値は、前記作動状況において異なるものであること
を特徴とする制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記閾値は、前記特定の方向毎に値が定められていること
を特徴とする制御装置。
【請求項4】
請求項1から3のいずれか一項に記載の制御装置であって、
前記利用者の動作は、利用者の頭部の動作であること、
を特徴とする制御装置。
【請求項5】
請求項1から4のいずれか一項に記載の制御装置を備えることを特徴とするヘッドマウントディスプレイ装置。
【請求項6】
請求項5に記載のヘッドマウントディスプレイ装置であって、
前記利用者の装着向きを検出する装着方向検出部をさらに備え、
前記制御部は、
前記利用者の装着向きに応じて、異なる閾値を用いて処理を行うこと
を特徴とするヘッドマウントディスプレイ装置。
【請求項7】
コンピュータを、
装置を装着している利用者の動きを検出する検出手段における検出値により利用者の動作を検出し、検出した利用者の動作に応じた処理を制御対象に対して行う制御手段、
として機能させるプログラムであって、
前記制御手段は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とするプログラム。
【請求項8】
動き検出部と、制御部と、を備える制御装置が行う制御方法であって、
前記動き検出部が、利用者の動きを検出する動き検出過程と、
前記制御部が、前記動き検出過程において検出された検出値に基づいて、利用者の動作を検出する動作検知過程と、
前記制御部が、前記動作検知過程において検出した利用者の動作に応じた処理を行う制御過程と、を備え、
前記制御過程では、前記制御部は、前記制御対象の作動状況を判断して、当該作動状況に応じて、利用者の動作を検出する感度が異なるようにすること
を特徴とする制御方法。
【図1】



【図2】

【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−122476(P2009−122476A)
【公開日】平成21年6月4日(2009.6.4)
【国際特許分類】
【出願番号】特願2007−297512(P2007−297512)
【出願日】平成19年11月16日(2007.11.16)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成21年6月4日(2009.6.4)
【国際特許分類】
【出願日】平成19年11月16日(2007.11.16)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]