
制御装置、光受信装置および制御方法
【課題】特性の制御を安定させること。
【解決手段】制御装置120は、第1演算器122と、更新制御回路123と、取得部125と、第2演算器126と、を備えている。第1演算器122は、処理装置の第1特性の検出結果に基づいて、第1特性を変化させる処理装置のパラメータを操作する。更新制御回路123は、第1演算器122の機能を更新する場合に、第1演算器122によるパラメータの操作を停止させる。取得部125は、パラメータの操作量と、第1特性を変化させる処理装置の第2特性の変化量との関係を示す関係情報を取得する。第2演算器126は、更新制御回路123によって第1演算器122によるパラメータの操作が停止している場合に、取得部125によって取得された関係情報と、第2特性の検出結果の変化量と、に基づく操作量によってパラメータを操作する。
【解決手段】制御装置120は、第1演算器122と、更新制御回路123と、取得部125と、第2演算器126と、を備えている。第1演算器122は、処理装置の第1特性の検出結果に基づいて、第1特性を変化させる処理装置のパラメータを操作する。更新制御回路123は、第1演算器122の機能を更新する場合に、第1演算器122によるパラメータの操作を停止させる。取得部125は、パラメータの操作量と、第1特性を変化させる処理装置の第2特性の変化量との関係を示す関係情報を取得する。第2演算器126は、更新制御回路123によって第1演算器122によるパラメータの操作が停止している場合に、取得部125によって取得された関係情報と、第2特性の検出結果の変化量と、に基づく操作量によってパラメータを操作する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特性を制御する制御装置、光受信装置および制御方法に関する。
【背景技術】
【0002】
たとえば通信装置などの処理装置に含まれる演算器(演算回路)の機能を、処理装置の運転中に更新できるようにするFWDL(Firm−Ware Down−Load)が知られている。更新対象の演算器は、PLD(ProgrammAble Logic Device)、FPGA(Field Programmable Gate Array)、CPU(Central Processing Unit)などのプログラマブルなデバイスである。このような演算器は、たとえば、処理装置における特性の補償のためのフィードバック制御などで用いられている。
【0003】
また、処理装置における特性の補償のために、フィードバック制御とフィードフォワード制御を併用する構成が知られている。たとえば、光アンプモジュールの制御構成などにおいて、フィードバック制御のみでは制御困難な高速な変動をフィードフォワード制御により補償する構成が知られている。
【0004】
フィードバック制御においては、たとえば、補償対象の特性を検出し、検出結果に基づいて、補償対象の特性を変化させる操作値を調整する。フィードフォワード制御においては、たとえば、補償対象の特性を変化させる外乱などの特性を検出し、検出結果に基づいて、補償対象の特性を変化させる操作値を調整する。
【0005】
たとえば、処理装置の運転中に、フィードバック制御を行う演算器の機能を更新する場合は、操作値が過渡的に予期せぬ値に変動することを回避するために、フィードバック制御を一時停止させることが考えられる。また、たとえば更新対象の演算器が大規模である場合や、定義ファイルをダウンロードすることによって演算器の更新を行う場合は、更新に時間がかかり、たとえば更新に数十秒程度かかる場合がある。
【0006】
フィードバック制御を用いる処理装置としては、たとえば、信号光を受信するコヒーレント光受信装置がある。コヒーレント光受信装置においては、たとえば、信号光と局発光との位相差を補償するために、フィードバック制御によって局発光の周波数を調整する構成が知られている(たとえば、下記特許文献1〜4参照。)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−135930号公報
【特許文献2】特開2010−109847号公報
【特許文献3】特開2009−253971号公報
【特許文献4】特開2009−49613号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した従来技術では、フィードバック制御を行う演算器を停止させる際に、誤差(たとえば系統誤差)の大きいフィードフォワード制御だけでは、外乱などによる特性のばらつきを補償しきれなくなることがある。このため、フィードバック制御を行う演算器の機能を更新する場合に、処理装置の特性の制御を安定させることができないという問題がある。
【0009】
本発明は、上述した従来技術による問題点を解消するため、特性の制御を安定させることができる制御装置、光受信装置および制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決し、目的を達成するため、本発明の一側面によれば、第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、前記第1演算器による前記パラメータの操作が停止している場合に、取得した関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する制御装置、光受信装置および制御方法が提案される。
【発明の効果】
【0011】
本発明の一側面によれば、特性の制御を安定させることができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施の形態1にかかる制御装置の構成例を示す図である。
【図2】図2は、更新制御回路による更新制御の一例を示すフローチャートである。
【図3−1】図3−1は、第1演算器の動作時の制御状態の一例を示す図である。
【図3−2】図3−2は、第1演算器の停止時に第2演算器の制御を変更しないと仮定した場合の制御状態の一例を示す参考図である。
【図3−3】図3−3は、第1演算器の停止時に第2演算器の制御を変更する場合の制御状態の一例を示す図である。
【図4】図4は、更新制御回路による更新制御の変形例を示すフローチャートである。
【図5】図5は、実施の形態2にかかる光受信装置の構成例を示す図である。
【図6】図6は、LDの特性の一例を示す図である。
【図7】図7は、更新制御回路による更新制御の例1を示すフローチャートである。
【図8】図8は、更新制御回路による更新制御の例2を示すフローチャートである。
【図9】図9は、実施の形態3にかかる光受信装置の構成例を示す図である。
【図10】図10は、光位相調整素子の温度に対する光位相の特性の一例を示す図である。
【図11】図11は、図9に示した光受信装置の変形例を示す図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照して、本発明にかかる制御装置、光受信装置および制御方法の実施の形態を詳細に説明する。
【0014】
(実施の形態1)
(制御装置の構成例)
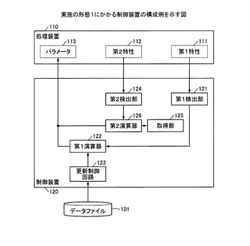
図1は、実施の形態1にかかる制御装置の構成例を示す図である。図1に示す制御装置120は、処理装置110の第1特性111の変動を、処理装置110のパラメータ113を操作することによって補償する制御装置である。具体的には、制御装置120は、第1検出部121と、第1演算器122と、更新制御回路123と、第2検出部124と、取得部125と、第2演算器126と、を備えている。
【0015】
第1検出部121は、処理装置110の第1特性111を検出する。第1特性111は、制御装置120による制御対象(補償対象)の特性である。第1検出部121は、第1特性111の検出結果を第1演算器122へ出力する。
【0016】
第1演算器122は、第1検出部121から出力された第1特性111の検出結果に基づいて、処理装置110のパラメータ113を操作するフィードバック制御を行う。たとえば、第1演算器122は、パラメータ113の操作を指示する操作値を処理装置110へ出力することでパラメータ113を増加または低下させる。
【0017】
パラメータ113は、第1特性111を変化させるパラメータである。また、パラメータ113は、第1特性111を変化させる複数のパラメータ(たとえば第1パラメータと第2パラメータ)を含んでいてもよい。たとえば、第1演算器122は、第1特性111の検出結果が所定の範囲内になるまでパラメータ113を変化させる。
【0018】
また、第1演算器122は、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスである。具体的には、第1演算器122は、更新制御回路123によって新たなデータファイルを適用されることによって機能を更新可能である。
【0019】
更新制御回路123は、第1演算器122の機能を更新する更新制御部である。第1演算器122の機能の更新は、たとえば、第1演算器122によって行う演算に用いるアルゴリズムやデータの調整などである。また、更新制御回路123は、第1演算器122の機能を更新する場合に、第1演算器122によるパラメータ113の制御を停止させる。たとえば、更新制御回路123は、第1演算器122によるパラメータ113の操作値を固定させる。
【0020】
たとえば、更新制御回路123は、データファイル101をネットワークを介してダウンロードし、ダウンロードしたデータファイル101を第1演算器122に適用することで第1演算器122の機能を更新する。または、更新制御回路123は、記憶媒体に記憶されたデータファイル101を読み取り、読み取ったデータファイル101を第1演算器122に適用することで第1演算器122の機能を更新してもよい。また、更新制御回路123は、たとえばシリアル通信が可能なI2Cインターフェイス(マイクロワイア)を介して第1演算器122の機能を更新する。
【0021】
第2検出部124は、処理装置110の第2特性112を検出する。第2特性112は、第1特性111とは異なる処理装置110の特性であり、第1特性111を変化させる(第1特性111に作用する)特性である。また、第2特性112は、第1特性111を変化させる複数の特性(たとえば第3特性および第4特性)を含んでいてもよい。第2検出部124は、第2特性112の検出結果を第2演算器126へ出力する。
【0022】
取得部125は、パラメータ113の操作量(マイナスの操作量も含む)と、第2特性112の変化量(マイナスの変化量も含む)との関係を示す関係情報を取得する。関係情報は、たとえば、パラメータ113の操作値と第2特性112との比率を示す情報(関数)である。または、関係情報は、パラメータ113の操作量と、第2特性112の変化量と、を対応付けるテーブルなどであってもよい。
【0023】
たとえば、関係情報は制御装置120のメモリに記憶されており、取得部125は、メモリから関係情報を取得する。また、取得部125は、第2演算器126の動作時に外部(たとえば更新制御回路123)から関係情報を取得してもよい。なお、取得部125は、第2演算器126と同一の回路によって実現してもよい。
【0024】
第2演算器126は、更新制御回路123によって第1演算器122によるパラメータ113の制御が停止している場合に、確度の高いフィードフォワード制御によって第2特性112の変動を補償する。フィードフォワード制御の確度とは、ある一定の条件下で制御した値に生じうる誤差の度合いであり、制御の目標値に近いことを示す尺度である。具体的には、第2演算器126は、取得部125により取得された関係情報と、第2演算器126から出力された第2特性112の検出結果の変化量と、に基づく操作量によってパラメータ113を操作する。たとえば、第2演算器126は、パラメータ113の操作を指示する操作値を処理装置110へ出力することでパラメータ113を操作する。
【0025】
具体的には、第2演算器126は、関係情報に基づいて、第2特性112の検出結果の変化量を補償(相殺)するパラメータ113の操作量を導出する。そして、第2演算器126は、導出した操作量によってパラメータ113を操作する。たとえば、第2特性112の検出結果がΔ1だけ増加した場合は、第2特性112をΔ1だけ低下させる操作量Δ2を関係情報に基づいて導出する。そして、第2演算器126は、導出した操作量Δ2によってパラメータ113を操作する。
【0026】
これにより、第2特性112がΔ1だけ低下して元に戻る。このように、関係情報を用いることにより、第2特性112の変化量を補償するパラメータ113の操作量を導出することができる。このため、確度の高い制御によってパラメータ113を操作し、第2特性112の変動を補償することができる。
【0027】
したがって、第1演算器122による制御が停止していても、第2演算器126によって、第1特性111を変化させる第2特性112の変動を抑え、第1特性111の変動を抑えることができる。なお、第1演算器122による制御が停止していない場合は、第2演算器126は、関係情報を用いた制御を行ってもよいし、関係情報を用いない制御を行ってもよい。たとえば、第2演算器126は、関係情報を用いない制御として、第2特性112の検出結果が所定の範囲内になるまでパラメータ113を変化させる制御を行う。
【0028】
また、パラメータ113が複数のパラメータ(たとえば第1パラメータと第2パラメータ)を含む場合は、第2演算器126は、パラメータ113に含まれる複数のパラメータのうちの少なくともいずれかを操作する。この場合は、取得部125は、パラメータ113に含まれる複数のパラメータのそれぞれに関する関係情報を取得する。
【0029】
このように、制御装置120においては、フィードバック制御を行う第1演算器122の機能の更新中に第2演算器126により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器122の更新中の第1特性111の制御を安定させることができる。
【0030】
(更新制御回路による更新制御)
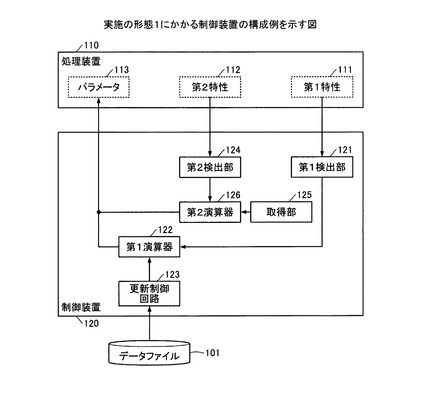
図2は、更新制御回路による更新制御の一例を示すフローチャートである。更新制御回路123は、第1演算器122の機能を更新する場合に、たとえば図2に示す各ステップを実行する。ここでは、第2演算器126が、第1演算器122の停止時には関係情報を用いた制御を行い、第1演算器122の動作時には関係情報を用いた制御を行わないとする。まず、更新制御回路123は、第1演算器122に制御を停止させる(ステップS201)。具体的には、更新制御回路123は、第1演算器122が出力する操作値を保持させる。
【0031】
つぎに、更新制御回路123は、第2演算器126による制御が安定したか否かを判断する(ステップS202)。たとえば、更新制御回路123は、第2演算器126から出力される操作値を一定の時間間隔で取得し、取得した操作値の変化量を算出する。そして更新制御回路123は、変化量が閾値より高ければ第2演算器126による制御が安定していないと判断し、変化量が閾値以下であれば第2演算器126による制御が安定したと判断する。
【0032】
ステップS202において、更新制御回路123は、第2演算器126による制御が安定するまで待つ(ステップS202:Noのループ)。第2演算器126による制御が安定すると(ステップS202:Yes)、更新制御回路123は、第1演算器122の機能の更新を開始する(ステップS203)。つぎに、更新制御回路123は、第2演算器126に、関係情報を用いた制御を開始させる(ステップS204)。
【0033】
つぎに、更新制御回路123は、ステップS203によって開始した第1演算器122の機能の更新が終了したか否かを判断し(ステップS205)、第1演算器122の機能の更新が終了するまで待つ(ステップS205:Noのループ)。第1演算器122の機能の更新が終了した場合(ステップS205:Yes)は、更新制御回路123は、第2演算器126に、関係情報を用いた制御を停止させる(ステップS206)。
【0034】
つぎに、更新制御回路123は、第1演算器122に制御を開始させ(ステップS207)、一連の更新制御を終了する。以上の各ステップにより、第1特性111の制御を行いながら、第1演算器122の機能を更新することができる。また、第1演算器122を更新している間は、第2演算器126によって関係情報を用いた制御を行うことで、第1特性111の制御を安定して行うことができる。
【0035】
また、第1演算器122の制御を停止させた後、第2演算器126による制御が安定するのを待ってから第2演算器126に関係情報を用いた制御を開始させることで、第2演算器126による関係情報を用いた制御のばたつきを抑えることができる。
【0036】
なお、第1演算器122による制御中も第2演算器126に関係情報を用いた制御を実行させる場合は、ステップS204,S206を省いてもよい。また、第1演算器122によるフィードバック制御の応答速度より、第2演算器126による関係情報を用いない制御の応答速度の方が十分に速い(たとえば10倍以上速い)場合には、各制御が互いに干渉を起こさない。このため、ステップS206を省いても、第2演算器126による関係情報を用いた制御のばたつきを抑えることができる。
【0037】
(制御状態の例)
ここでは、第2演算器126が、第1演算器122の動作時には関係情報を用いた制御を行い、第1演算器122の停止時には関係情報を用いない制御を行う場合の第1特性111の制御状態の例について説明する。
【0038】
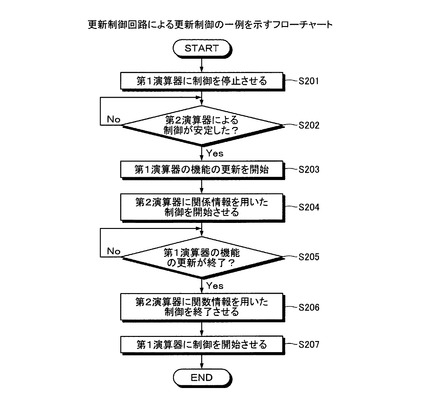
図3−1は、第1演算器の動作時の制御状態の一例を示す図である。図3−1において、横軸は時間を示し、縦軸は第1特性111の補償値を示している。補償値変化301は、第1演算器122のフィードバック制御による補償値の変化を示している。補償値変化302は、関係情報を用いずに第2演算器126が行う制御による補償値の変化を示している。補償値変化303は、第1特性111の実際の補償値であり、補償値変化301と補償値変化302を加算した補償値の変化である。
【0039】
許容範囲304は、処理装置110において許容される第1特性111の補償値の範囲である。第2演算器126による関係情報を用いない制御は、確度が悪いため、補償値変化302は許容範囲304から逸脱している。一方、第1演算器122の確度がよいため、補償値変化301は補償値変化302を補償するように変化している。このため、補償値変化303に示すように、実際の補償値は許容範囲304に収まっている。
【0040】
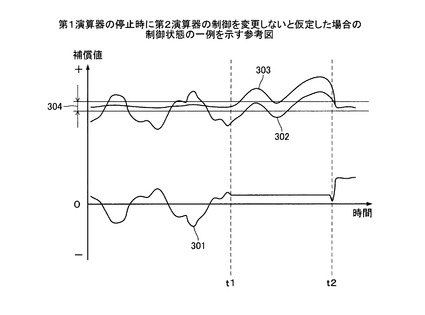
図3−2は、第1演算器の停止時に第2演算器の制御を変更しないと仮定した場合の制御状態の一例を示す参考図である。図3−2において、図3−1に示した部分と同様の部分については説明を省略する。時点t1から時点t2までの期間において、第1演算器122の機能の更新を行い、補償値変化301に示すように、第1演算器122によるフィードバック制御を停止したとする。
【0041】
そして、時点t1から時点t2までの期間において、第2演算器126の制御を、関係情報を用いた制御に変更しないと仮定する。この場合は、図3−2の補償値変化303に示すように、外乱などによって第2演算器126による制御が動作するにつれて、補償値変化303が許容範囲304から外れていく。
【0042】
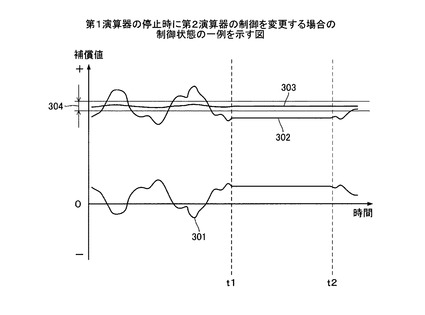
図3−3は、第1演算器の停止時に第2演算器の制御を変更する場合の制御状態の一例を示す図である。図3−3において、図3−2に示した部分と同様の部分については説明を省略する。更新制御回路123は、時点t1から時点t2までの期間において、第2演算器126の制御を、関係情報を用いた制御に変更する。
【0043】
また、切り替え後の第2演算器126のフィードフォワード制御は、第1演算器を停止させた時点t1における検出値を基準値とし、検出値を基準値に保つように行う制御とする。これにより、補償値変化303に示すように、実際の補償値は許容範囲304に収まっている。また、更新制御回路123は、時点t2において第1演算器122によるフィードバック制御を再開すると、第2演算器126の制御を元に戻す。
【0044】
(更新制御の変形例)
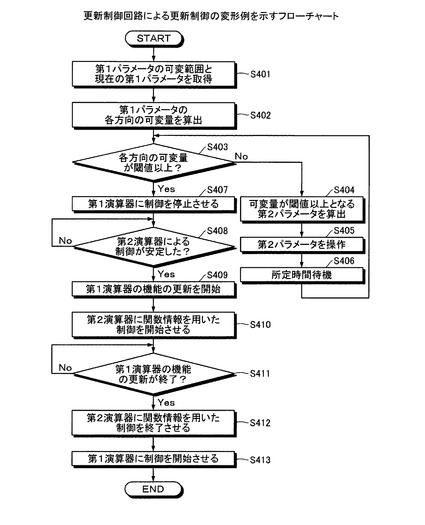
図4は、更新制御回路による更新制御の変形例を示すフローチャートである。更新制御回路123は、第1演算器122の機能を更新する場合に、たとえば図4に示す各ステップを実行する。ここでは、第2演算器126が、第1演算器122の停止時には関係情報を用いた制御を行い、第1演算器122の動作時には関係情報を用いた制御を行わないとする。また、パラメータ113は、第1パラメータと第2パラメータを含むとする。
【0045】
まず、更新制御回路123は、第1パラメータの可変範囲と、現在の第1パラメータと、を取得する(ステップS401)。たとえば、第1パラメータの可変範囲は、制御装置120のメモリにあらかじめ記憶されており、更新制御回路123はメモリから第1パラメータの可変範囲を取得する。また、更新制御回路123は、処理装置110へ出力される第1パラメータを取得することによって現在の第1パラメータを取得する。
【0046】
つぎに、更新制御回路123は、ステップS401によって取得した第1パラメータの可変範囲と現在の第1パラメータとに基づいて、現在の第1パラメータの各方向(増加方向と減少方向)の可変量を算出する(ステップS402)。たとえば、第1パラメータの上限と現在の第1パラメータの差分を算出することにより、現在の第1パラメータの増加方向の可変量を算出することができる。また、第1パラメータの下限と現在の第1パラメータの差分を算出することにより、現在の第1パラメータの減少方向の可変量を算出することができる。
【0047】
つぎに、更新制御回路123は、ステップS402によって算出した各方向の可変量が閾値以上か否かを判断する(ステップS403)。少なくともいずれかの方向の可変量が閾値以上でない場合(ステップS403:No)は、更新制御回路123は、可変量が閾値以上でない方向の可変量が閾値以上となる第2パラメータを算出する(ステップS404)。つぎに、更新制御回路123は、ステップS404によって算出した第2パラメータとなるように処理装置110の第2パラメータを操作する(ステップS405)。
【0048】
つぎに、更新制御回路123は、所定時間待機し(ステップS406)、ステップS403へ戻る。ステップS406によって待機する所定時間は、たとえば、第2パラメータの操作による第1パラメータの変化が収束するのに十分な時間とする。
【0049】
ステップS403において、ステップS402によって算出した各方向の可変量が閾値以上である場合(ステップS403:Yes)は、更新制御回路123は、ステップS407へ移行する。図4に示すステップS407〜S413は、図2に示したステップS201〜S207と同様である。
【0050】
以上の各ステップにより、第1演算器122を停止する時の第1パラメータと、第1パラメータの可変範囲と、に基づいて第1パラメータおよび第2パラメータを調整してから第1演算器122を停止することができる。具体的には、第2演算器126が操作する第1パラメータの増加方向と減少方向の各可変範囲が閾値以上になるように第1パラメータおよび第2パラメータを調整する。
【0051】
第1パラメータおよび第2パラメータはともに第1特性111を変化させるパラメータであるため、第2パラメータを調整することで第1パラメータを変化させることができる。これにより、第2演算器126による制御における第1パラメータの増加方向と減少方向の各可変範囲を確保し、第1特性111を安定して制御することができる。
【0052】
また、第2特性112が第3特性と第4特性を含み、第1パラメータは第3特性を変化させ、第2パラメータは第4特性を含むパラメータである場合について説明する。この場合は、第1演算器122を停止する時の第2特性112の検出結果と第2特性112の可変範囲とに基づいて第1パラメータおよび第2パラメータを調整してもよい(たとえば図8参照)。
【0053】
第1パラメータおよび第2パラメータはともに第1特性111を変化させるパラメータであるため、第2パラメータを調整することで第1パラメータを変化させることができる。これにより、第2演算器126による制御における第2特性112の増加方向と減少方向の各可変範囲を確保し、第1特性111を安定して制御することができる。
【0054】
このように、実施の形態1にかかる制御装置120においては、フィードバック制御を行う第1演算器122の機能の更新中に第2演算器126により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。関係情報を用いることで、検出値の変化量をキャンセルできる操作量を導出することができるため、フィードフォワード制御の確度を向上させる(系統誤差を小さくする)ことができる。このため、第1演算器122の更新中の第1特性111の制御を安定させることができる。
【0055】
また、第1演算器122によるパラメータ113の制御が停止される時の第2特性112の検出結果を基準値として、第2特性112の検出結果の基準値からの変動を補償するパラメータ113の操作量を導出してもよい。これにより、第1演算器122による制御が停止中の第2特性112を、第1演算器122による制御が停止した時の状態に維持することができる。このため、第1演算器122による制御が停止中の第1特性111の変動を抑えることができる。
【0056】
また、第1演算器122の制御を停止させる前に第1パラメータを調整しておけば、第1パラメータの増加方向と減少方向の各可変範囲を確保して第2演算器126によるフィードフォワード制御を行うことができる。このため、第1特性111をさらに安定して制御することができる。
【0057】
また、更新制御回路123が、第1演算器122の更新のタイミングに基づいて第2演算器126の制御を切り替えることで、第1演算器122による制御と、第2演算器126による制御と、の干渉を抑え、第1特性111の制御を安定させることができる。
【0058】
(実施の形態2)
(光受信装置の構成例)
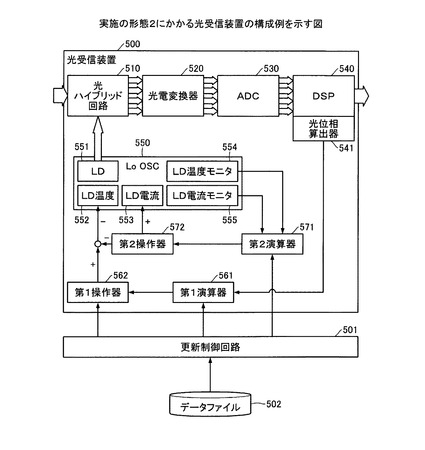
図5は、実施の形態2にかかる光受信装置の構成例を示す図である。図5に示す光受信装置500は、図1に示した制御装置120を適用した光受信装置である。光受信装置500は、イントラダイン検波方式(Intradyne method)によって信号光を受信するコヒーレント光受信装置である。光受信装置500は、光ハイブリッド回路510と、光電変換器520と、ADC530と、DSP540と、ローカルオシレータ550と、第1演算器561と、第1操作器562と、第2演算器571と、第2操作器572と、を備えている。
【0059】
<光受信回路について>
光ハイブリッド回路510、光電変換器520、ADC530、DSP540およびローカルオシレータ550は、図1に示した処理装置110に対応する構成であり、イントラダイン検波方式によって信号光を受信する光受信回路である。
【0060】
光ハイブリッド回路510は、光受信装置500へ入力された信号光と、ローカルオシレータ550から出力された局発光と、を複数の異なる位相で干渉させる(混合する)。たとえば、光ハイブリッド回路510は、信号光と局発光とを0°と90°の位相で干渉させる90°ハイブリッド回路である(90deg Hybrid)。光ハイブリッド回路510は、干渉により得られた各ビート信号光(干渉結果)を光電変換器520へ出力する。各ビート信号光は、光受信装置500へ入力された信号光の振幅と位相を示す信号となる。
【0061】
光電変換器520は、光ハイブリッド回路510から出力された各ビート信号光を光電変換し、光電変換した各ビート信号をADC530へ出力する。ADC530(Analog/Digital Converter)は、光電変換器520から出力された各ビート信号をデジタル信号に変換する。ADC530は、デジタル信号に変換した各ビート信号をDSP540へ出力する。
【0062】
DSP540(Digital Signal Processor)は、ADC530から出力された各ビート信号のデジタル処理を行うことで、各ビート信号を復調し、光受信装置500へ入力された信号光が示すデータを識別する。また、DSP540は、光位相算出器541を有する。光位相算出器541は、ADC530から出力された各ビート信号のデジタル処理により、ローカルオシレータ550から出力される局発光と、光受信装置500へ入力される信号光と、の位相差(位相ズレ)を算出(推定)する。
【0063】
光位相算出器541は、図1に示した第1検出部121に対応する構成である。局発光と信号光との位相差は、図1に示した第1特性111に対応する補償対象の特性である。また、局発光と信号光との位相差は、ローカルオシレータ550から出力される局発光の周波数と、信号光のキャリア中心周波数と、のズレによって生じる。信号光のキャリア中心周波数は、送信側の光源の発振周波数によって決まる。光位相算出器541は、算出した位相差を示す位相差算出値を第1演算器561へ出力する。
【0064】
<ローカルオシレータについて>
ローカルオシレータ550(Lo OSC)は、LD551と、LD温度調整部552と、LD電流調整部553と、LD温度モニタ554と、LD電流モニタ555と、を備えている。LD温度モニタ554およびLD電流モニタ555は、図1に示した第2検出部124に対応する構成である。
【0065】
LD551(Laser Diode:半導体レーザ)は、局発光(局部発振光)を発振して光ハイブリッド回路510へ出力する。LD551が発振する局発光は、たとえばCW光(Continuous Wave:連続光)である。LD551の温度およびLD551へ供給される駆動電流の大きさは、図1で説明した第2特性112に対応する特性である。たとえばLD551の温度は第3特性に対応し、LD551へ供給される駆動電流の大きさは第4特性に対応する。
【0066】
LD551は、たとえばDFB(Distributed Feed−Back:分布帰還型)レーザである。または、LD551は、DBR(Distributed Bragg Reflector:分布反射型)レーザなどであってもよい。LD551が発振する局発光の周波数は、LD551の温度や、LD551を駆動する駆動電流の大きさによって変化する(たとえば特開平8−316576号公報参照)。
【0067】
LD温度調整部552は、入力される温度操作値に応じてLD551の温度を調整する。LD温度調整部552は、たとえば、ヒータなどの加熱素子やペルチェ素子などの加熱および冷却ができる素子である。
【0068】
LD電流調整部553は、入力される操作値に応じてLD551へ供給される駆動電流の大きさを調整する。たとえば、LD電流調整部553には、駆動電流が操作値として入力される。この場合は、LD電流調整部553は、入力された駆動電流をLD551へ供給する。また、LD電流調整部553には、操作値として駆動電流の大きさを指示する制御信号が入力されてもよい。この場合は、LD電流調整部553は、入力された制御信号に基づいて、電源からLD551へ供給される駆動電流を調整する。
【0069】
LD温度モニタ554は、LD551の温度をモニタする。LD温度モニタ554は、温度のモニタ結果を示す温度モニタ値を第2演算器571へ出力する。LD電流モニタ555は、LD551の駆動電流の大きさをモニタする。LD電流モニタ555は、駆動電流の大きさのモニタ結果を示す電流モニタ値を第2演算器571へ出力する。
【0070】
<第1演算器および第1操作器について>
第1演算器561および第1操作器562は、図1に示した第1演算器122に対応する構成である。第1演算器561は、光位相算出器541から出力された位相差算出値に基づいて、ローカルオシレータ550から出力される局発光の周波数を制御し、局発光と信号光との位相差を補償するフィードバック制御を行う。
【0071】
具体的には、第1演算器561は、位相差算出値が示す位相差が所定の範囲になるように局発光の周波数を制御する。また、第1演算器561は、局発光の周波数の制御を、LD551の温度を制御することによって行う。また、第1演算器561は、LD551の温度の制御を、第1操作器562がローカルオシレータ550へ出力する温度操作値を制御することによって行う。
【0072】
たとえば、第1演算器561は、位相差算出値に基づいて、局発光の周波数が信号光の周波数より高い場合は、局発光の周波数が一定量低下するようにLD551の温度を制御する。また、第1演算器561は、局発光の周波数が信号光の周波数より低い場合は、局発光の周波数が一定量増加するようにLD551の温度を制御する。第1演算器561によるフィードバック制御は、たとえば、信号光と局発光との間の100[MHz]程度以下の周波数のズレを補償可能な確度によって行われる。
【0073】
また、第1演算器561は、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスである。具体的には、第1演算器561は、更新制御回路501からの制御によって機構を更新可能である。
【0074】
第1操作器562は、第1演算器561からの制御にしたがって、温度操作値をLD温度調整部552へ出力することでLD551の温度を操作する。たとえば、第1演算器561は第1操作器562へデジタル信号の温度操作値を出力する。第1操作器562は、第1演算器561から出力された温度操作値をアナログ信号に変換してLD温度調整部552へ出力する。また、第1操作器562は、更新制御回路501からの制御にしたがって、LD温度調整部552へ出力する温度操作値を固定可能である。温度操作値は、図1で説明したパラメータ113の第1パラメータに対応するパラメータである。
【0075】
<第2演算器および第2操作器について>
第2演算器571および第2操作器572は、図1に示した第2演算器126に対応する構成である。第2演算器571は、ローカルオシレータ550から出力されるモニタ値に基づいて、ローカルオシレータ550から出力される局発光の周波数を制御し、局発光と信号光との位相差を補償するフィードフォワード制御を行う。ローカルオシレータ550から出力されるモニタ値は、たとえば、温度情報および電流情報の少なくともいずれかである。
【0076】
具体的には、第2演算器571は、局発光の周波数の制御を、LD551の温度および駆動電流の少なくともいずれかを制御することによって行う。また、第2演算器571は、LD551の温度の制御を、第2操作器572がローカルオシレータ550へ出力する温度操作値を制御することによって行う。また、第2演算器571は、LD551の駆動電流の制御を、第2操作器572がローカルオシレータ550へ出力する電流操作値を制御することによって行う。
【0077】
また、第2演算器571は、モニタ値に基づく局発光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。たとえば、第2演算器571は、第1制御および第2制御を実行する機能を有しており、更新制御回路501からの制御信号によって第1制御と第2制御とを切り替えて実行する。または、第2演算器571は、更新制御回路501によって機能を更新(書き換え)可能な回路であり、更新制御回路501による更新によって第1制御と第2制御とを切り替えて実行してもよい。
【0078】
第1制御においては、第2演算器571は、モニタ値が所定の範囲に収まっていない場合に、操作値(温度操作値および電流操作値の少なくともいずれか)を変化させるように第2操作器572を制御する。第1制御においては、第2演算器571によるフィードフォワード制御は、たとえば、信号光と局発光との間の100[MHz]程度の周波数のズレおよび100[MHz]程度以下の周波数のズレを補償可能な確度より低い確度によって行われる。
【0079】
第2制御においては、第2演算器571は、モニタ値の変化量に基づく操作値(温度操作値および電流操作値の少なくともいずれか)の変化量を導出し、導出した変化量によって操作値を変化させるように第2操作器572を制御する。具体的には、第2演算器571には、モニタ値と操作値との関係(たとえば比率)を示す関係情報が記憶されている。第2演算器571は、ローカルオシレータ550から出力されたモニタ値の変化量を補償する操作値の変化量を関係情報に基づいて導出し、導出した操作値の変化量に基づいて第2操作器572を制御する。
【0080】
また、関係情報は、たとえば、モニタ値と局発光の周波数との関係を示す第1関係情報と、局発光の周波数と操作値とを対応付ける第2関係情報と、の組み合わせであって、モニタ値と操作値との関係を間接的に示す情報でもよい。または、関係情報は、たとえば、モニタ値と操作値との関係を直接的に対応付ける関係情報であってもよい。
【0081】
このように、第2制御においては、関係情報を用いることにより、第1制御よりも高い確度によって局発光と信号光との位相差を補償することができる。第2演算器571は、たとえば、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスによって実現することができる。
【0082】
第2操作器572は、第2演算器571からの制御にしたがって温度操作値をLD温度調整部552へ出力することで、ローカルオシレータ550のLD551の温度を操作する。また、第2操作器572は、第2演算器571からの制御にしたがって電流操作値をLD電流調整部553へ入力することでLD551の駆動電流を操作する。
【0083】
たとえば、第2演算器571は第2操作器572へデジタル信号の温度操作値を出力する。第2操作器572は、第2演算器571から出力された温度操作値をアナログ信号に変換してLD温度調整部552へ出力する。また、たとえば、第2演算器571は第2操作器572へデジタル信号の電流操作値を出力する。第2操作器572は、第2演算器571から出力された電流操作値をアナログ信号に変換してLD電流調整部553へ出力する。また、電流操作値は、図1で説明したパラメータ113の第2パラメータに対応するパラメータである。
【0084】
<更新制御回路について>
更新制御回路501は、図1に示した更新制御回路123に対応する構成である。第1演算器561の機能を更新する。たとえば、更新制御回路501は、ネットワークからデータファイル502をダウンロードし、ダウンロードしたデータファイル502に基づいて第1演算器561の機能を更新する。また、更新制御回路501は、第1演算器561の機能を更新する場合に、第1演算器561によるフィードバック制御を停止させる。
【0085】
また、更新制御回路501は、第1演算器561によるフィードバック制御を停止させる期間は、第1操作器562が出力する温度操作値を保持するように第1操作器562を制御する。また、更新制御回路501は、第1演算器561のフィードバック制御の実行中は第2演算器571による制御を第1制御に設定し、第1演算器561のフィードバック制御の停止中は第2演算器571による制御を第2制御にする。更新制御回路501は、たとえば外部から機能を更新可能なPLD、FPGA、CPUなどによって実現することができる。
【0086】
(LDの特性)
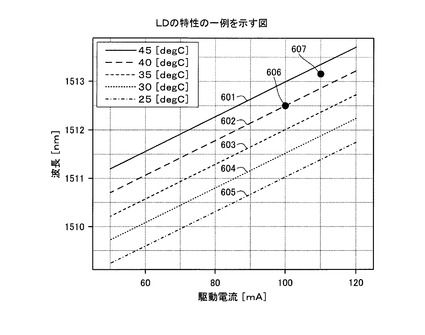
図6は、LDの特性の一例を示す図である。図6においては、一例としてDFBレーザを適用したLD551の特性について説明する。図6の横軸はLD551へ供給される駆動電流[mA]を示し、縦軸はLD551から出力される局発光の波長[nm]を示している。特性601〜605は、それぞれLD551の温度が45,40,35,30,25[degC]である場合の、駆動電流に対する局発光の波長の特性を示している。
【0087】
特性601〜605に示すように、LD551から出力される局発光の波長は、駆動電流が大きくなるほど長くなる。したがって、LD551から出力される局発光の周波数は、駆動電流が大きくなるほど低くなる。また、LD551から出力される局発光の波長は、LD551の温度が高くなるほど長くなる。したがって、LD551から出力される局発光の周波数は、LD551の温度が高くなるほど低くなる。
【0088】
たとえば、LD551から出力される局発光の波長の目標値を1512.5[nm]とすると、座標点606に示すように、LD551の温度を40[degC]、駆動電流を100[mA]とすればよい。これに対して、たとえば、外乱などによってLD551の温度が43[degC]、駆動電流が110[mA]となると、座標点607に示すように、局発光の波長はおよそ1513.2[nm]となる。
【0089】
(第2演算器による第2制御の具体例)
つぎに、第2演算器571による第2制御の一例について説明する。ここでは、光受信装置500の通常運転時に、第1演算器561のフィードバック制御によって、第1操作器562から出力される温度操作値は+1[degC]に収束しているものとする。
【0090】
また、LD551から出力される局発光の波長の目標値を1512.5[nm]とする。この場合は、第2演算器571によるフィードフォワード制御によって、LD551の温度を40[degC]、駆動電流を100[mA](図6の座標点606を参照)とするように各操作値を制御する。ここで、第2演算器571に対して、LD551の温度が43[degC]であることを示す温度モニタ値と、駆動電流が110[mA]であることを示す電流モニタ値と、が入力されたとする(図6の座標点607を参照)。
【0091】
第1演算器561によるフィードフォワード制御による操作値とフィードバック制御による操作値を単純に加算するとLD温度は40+1=41[degC]、LD電流は100[mA]となる。ただし、ここでは、絶対値の確度がないため、それぞれ+2[degC]、+10[mA]のズレが生じている状態とする。
【0092】
第2演算器571には、LD551の温度と局発光の周波数との関係を示す関数と、LD551の駆動電流と局発光の周波数との関係を示す関数と、があらかじめ記憶されている。たとえば、図6に示したように、LD551の温度と局発光の波長との比率が0.5[nm]/5[degC]=0.1[nm/degC]であるとする。また、光周波数の変化Δ100[GHz]に対する光波長変化を−Δ0.8[nm]とすると、LD551の温度と局発光の周波数との比率は−12.5[GHz/degC]となる。
【0093】
また、図6に示したように、LD551の駆動電流と局発光の波長との比率が1.5[nm]/40[mA]=0.035[nm/mA]であるとする。また、光周波数の変化Δ100[GHz]に対する光波長変化を−Δ0.8[nm]とすると、LD551の駆動電流と局発光の周波数との比率は−4.375[GHz/mA]となる。
【0094】
たとえば、光周波数100[MHz]の分解能によって制御を行うためには、LD温度モニタ554および第2操作器572は少なくとも80[mdegC]の分解能を有するようにする。また、LD電流モニタ555および第2操作器572は少なくとも23[uA]の分解能を有するようにする。
【0095】
第1演算器561の停止中における第2演算器571による第2制御において、LD551の温度基準値は、第1演算器561のフィードバック制御を停止させた時の温度モニタ値とする。また、第1演算器561の停止中における第2演算器571による第2制御において、電流基準値は、第1演算器561のフィードバック制御を停止させた時の電流モニタ値とする。第2演算器571は、周期的に、第1演算器561のフィードバック制御を停止させた時の局発光の周波数に対する現在の局発光の周波数の変化量を算出する。
【0096】
たとえば、第2演算器571は、LD551の温度の変化による局発光の周波数の変化量を、たとえば下記(1)式によって算出することができる。また、第2演算器571は、LD551の駆動電流の変化による局発光の周波数の変化量を、たとえば下記(2)式によって算出することができる。
【0097】
((現在の温度モニタ値)−(温度基準値))*(−12.5) …(1)
【0098】
((現在の電流モニタ値)−(電流基準値))*(−4.375) …(2)
【0099】
第2演算器571は、上記(1)式および(2)式の算出結果を加算することで、第1演算器561のフィードバック制御を停止させた時の局発光の周波数に対する、現在の局発光の周波数の変化(ズレ)を算出することができる。第2演算器571は、算出した周波数の変化量を補償するための温度操作値および電流操作値の少なくとも一方の変化量を算出し、算出した変化量に基づいて第2操作器572を制御する。
【0100】
たとえば、第2演算器571には、LD温度調整部552へ入力する温度操作値とLD551の温度との関係(たとえば比率)を示す関係情報が記憶されている。また、第2演算器571には、LD電流調整部553へ入力する電流操作値とLD551の駆動電流との関係(たとえば比率)を示す関係情報が記憶されている。
【0101】
第2演算器571は、記憶された関係情報に基づいて、周波数の変化を補償するための温度操作値および電流操作値の少なくとも一方の変化量を算出することができる。これにより、局発光の周波数を、高い確度により、第1演算器561のフィードバック制御を停止させた時の周波数に維持することができる。
【0102】
(更新制御回路による更新制御)
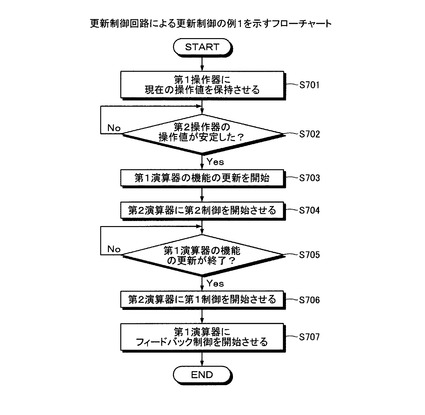
図7は、更新制御回路による更新制御の例1を示すフローチャートである。更新制御回路501は、第1演算器561の機能を更新する場合に、たとえば図7に示す各ステップを実行する。初期状態においては、第2演算器571は、第1制御を行っているとする。まず、更新制御回路501は、第1操作器562に現在の操作値を保持させる(ステップS701)。つぎに、更新制御回路501は、第2操作器572から出力される操作値(温度操作値および電流操作値)が安定したか否かを判断する(ステップS702)。
【0103】
たとえば、更新制御回路501は、第2操作器572から出力される各操作値を一定の時間間隔で取得し、取得した操作値の変化量を算出する。そして、更新制御回路501は、算出した変化量が閾値より高ければ操作値が安定していないと判断し、算出した変化量が閾値以下であれば操作値が安定したと判断する。
【0104】
ステップS702において、更新制御回路501は、操作値が安定するまで待つ(ステップS702:Noのループ)。操作値が安定すると(ステップS702:Yes)、更新制御回路501は、第1演算器561の機能の更新を開始する(ステップS703)。つぎに、更新制御回路501は、第2演算器571に第2制御を開始させる(ステップS704)。これにより、第2演算器571は、関係情報を用いた確度のよいフィードフォワード制御を開始する。
【0105】
つぎに、更新制御回路501は、ステップS703によって開始した第1演算器561の機能の更新が終了したか否かを判断し(ステップS705)、第1演算器561の機能の更新が終了するまで待つ(ステップS705:Noのループ)。第1演算器561の機能の更新が終了した場合(ステップS705:Yes)は、更新制御回路501は、第2演算器571に第1制御を開始させる(ステップS706)。これにより、第2演算器571によるフィードフォワード制御は、通常時の第1制御に戻る。
【0106】
つぎに、更新制御回路501は、第1演算器561にフィードバック制御を開始させ(ステップS707)、一連の制御を終了する。以上の各ステップにより、光受信装置500による光受信を行いながら、第1演算器561の機能を更新することができる。また、第1操作器562を更新している間は、第2演算器571に確度のよいフィードフォワード制御を実行させることで、第1操作器562によるフィードバック制御を停止しても位相差の補償を安定して行うことができる。
【0107】
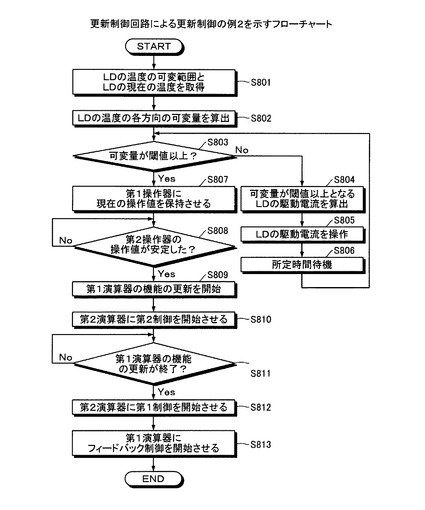
図8は、更新制御回路による更新制御の例2を示すフローチャートである。更新制御回路501は、第1演算器561の機能を更新する場合に、たとえば図8に示す各ステップを実行してもよい。まず、更新制御回路501は、LD551の温度の可変範囲と、LD551の現在の温度と、を取得する(ステップS801)。たとえば、LD551の温度の可変範囲は、光受信装置500のメモリにあらかじめ記憶されており、更新制御回路501はメモリからLD551の温度の可変範囲を取得する。また、更新制御回路501は、LD温度モニタ554から出力される温度モニタ値を取得することによって取得する。
【0108】
つぎに、更新制御回路501は、ステップS801によって取得した温度の可変範囲と現在の温度とに基づいて、LD551の温度の各方向(増加方向と減少方向)の可変量を算出する(ステップS802)。たとえば、LD551の温度の上限と現在のLD551の温度の差分を算出することにより、現在のLD551の温度の増加方向の可変量を算出することができる。また、LD551の温度の下限と現在のLD551の温度の差分を算出することにより、現在のLD551の温度の減少方向の可変量を算出することができる。つぎに、更新制御回路501は、ステップS802によって算出した各方向の可変量が閾値以上か否かを判断する(ステップS803)。
【0109】
ステップS803において、少なくともいずれかの方向の可変量が閾値以上でない場合(ステップS803:No)は、更新制御回路501は、可変量が閾値以上でない方向の可変量が閾値以上となるLD551の駆動電流を算出する(ステップS804)。つぎに、更新制御回路501は、第2操作器572を制御して、ステップS804によって算出した駆動電流となるようにLD551の駆動電流を操作する(ステップS805)。
【0110】
つぎに、更新制御回路501は、所定時間待機し(ステップS806)、ステップS803へ戻る。ステップS806によって待機する所定時間は、たとえば、LD551の駆動電流の操作によるLD551の温度の変化が収束するのに十分な時間とする。
【0111】
ステップS803において、ステップS802によって算出した各方向の可変量が閾値以上である場合(ステップS803:Yes)は、更新制御回路501は、ステップS807へ移行する。図8に示すステップS807〜S813は、図7に示したステップS701〜S707と同様である。
【0112】
以上の各ステップにより、第1演算器561を停止する時のLD551の温度の検出結果とLD551の温度の可変範囲とに基づいてLD551の温度および駆動電流の大きさを調整してから第1演算器561を停止することができる。具体的には、LD551の温度の増加方向と減少方向の各可変範囲が閾値以上になるようにLD551の温度および駆動電流の大きさを調整する。
【0113】
LD551の温度および駆動電流の大きさはともに局発光の周波数を変化させるパラメータであるため、駆動電流の大きさを調整することでLD551の温度を変化させることができる。これにより、第2演算器571による制御におけるLD551の温度の増加方向と減少方向の各可変範囲を確保し、局発光と信号光との位相差を安定して制御することができる。
【0114】
(駆動電流の大きさの調整の具体例)
たとえば、上記のように、第2演算器571による操作値について、LD551の温度を40[degC]、駆動電流を100[mA]に設定したとする。また、第2演算器571の制御によるLD551の温度の可変範囲は36〜40.5[degC]とする。また、第2演算器571の制御によるLD551の駆動電流の可変範囲は90〜105[mA]とする。
【0115】
この場合は、第2演算器571は、現在設定しているLD551の温度をΔ−4〜Δ+0.5[degC]の幅で更新可能である。また、第2演算器571は、現在設定しているLD551の駆動電流をΔ−10[mA]〜Δ+5[mA]の幅で更新可能である。したがって、たとえばLD551の温度の増加方向への可変量がΔ+0.5[degC]と小さい状態である。
【0116】
これに対して、たとえば、LD551の駆動電流を操作することで、LD551の温度を2[degC]だけ低下させて38[degC]として、第2演算器571による第2制御を行う。これにより、第2演算器571は、第2制御において、現在設定しているLD551の温度をΔ−2〜Δ+2.5[degC]の幅で更新可能になる。このため、外乱によってたとえば温度が2.5[degC]低下しても、第2演算器571は、LD551の温度を2.5[degC]増加させることができるため、LD551の温度を一定に保つことができる。
【0117】
このように、実施の形態2にかかる光受信装置500によれば、フィードバック制御を行う第1演算器561の機能の更新中に第2演算器571により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器561の更新中においても局発光と信号光との位相差の制御を安定させることができる。このため、通信品質を向上させることができる。
【0118】
また、たとえば、図5に示したローカルオシレータ550、第2演算器571および第2操作器572は、ITLA(Integrable Tunable Laser Assembly:波長可変レーザアセンブリ)モジュールによって実現される。これに対して、第1演算器561および第1操作器562は、たとえば、ITLAモジュールとは別に構成されるプログラマブルなデバイスであり、大規模な構成となる。
【0119】
これに対して、光受信装置500は、第1演算器561および第1操作器562によるフィードバック制御の停止中に行う確度のよい制御を第2演算器571および第2操作器572によるフィードフォワード制御によって実現する。このため、たとえばITLAモジュールとは別に第1演算器561および第1操作器562と同様のフィードバック制御を行う回路を設ける場合に比べて、回路規模を小さくすることができる。
【0120】
(実施の形態3)
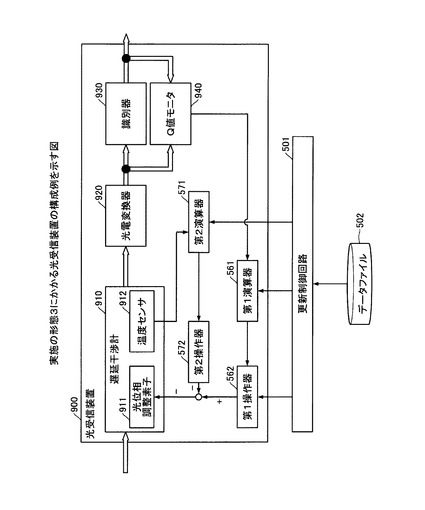
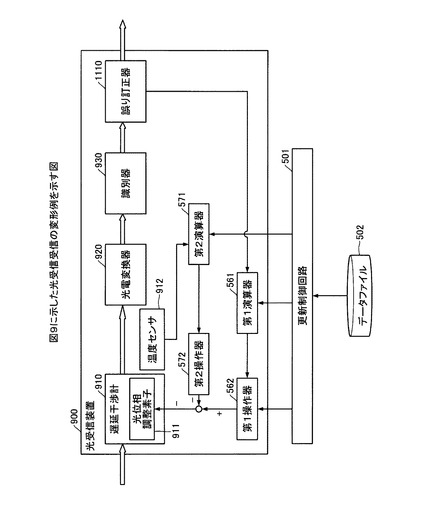
図9は、実施の形態3にかかる光受信装置の構成例を示す図である。図9において、図5に示した部分と同様の部分については同一の符号を付して説明を省略する。図9に示す光受信装置900は、図1に示した制御装置120を適用した光受信装置である。光受信装置900は、遅延干渉計910と、光電変換器920と、識別器930と、Q値モニタ940と、第1演算器561と、第1操作器562と、第2演算器571と、第2操作器572と、を備えている。
【0121】
<光受信回路について>
遅延干渉計910、光電変換器920および識別器930は、図1に示した処理装置110に対応する構成であり、たとえばDQPSK(Differential Quadrature Phase Shift Keying:差動四位相偏移変調)などにより変調された信号光を受信する光受信回路である。
【0122】
遅延干渉計910は、光受信装置900へ入力された信号光を分岐し、分岐した各信号光にたとえば1シンボル分の位相差を与え、位相差を与えた各信号光を干渉させて光電変換器920へ出力する。遅延干渉計910は、光位相調整素子911と、温度センサ912と、を備えている。
【0123】
光位相調整素子911は、分岐された各信号光に位相差を与える。たとえば、光位相調整素子911は、分岐された各信号光の一方の光位相(遅延量)を、入力された位相操作値に応じた光位相に調整することで、分岐された各信号光に位相差を与える。たとえば、光位相調整素子911は、分岐された各信号光の一方が通過する光導波路の温度を変化させることで、分岐された各信号光の一方の光位相を変化させる。
【0124】
温度センサ912は、遅延干渉計910の温度(たとえばケース温度)を検出する。温度センサ912は、検出した温度を示す温度検出値を第2演算器571へ出力する。温度センサ912は、図1に示した第2検出部124に対応する構成である。遅延干渉計910の温度は、図1で説明した第2特性112に対応する特性である。
【0125】
光電変換器920は、遅延干渉計910から出力された信号光を光電変換し、電気信号に変換した信号を識別器930へ出力する。識別器930は、光電変換器920から出力された信号が示すデータを識別する。識別器930は、識別したデータを出力する。
【0126】
Q値モニタ940は、光電変換器920から出力された信号と、識別器930から出力されたデータと、に基づいて、光受信装置900が受信した信号光のQ値(受信品質)を検出する。Q値モニタ940は、図1に示した第1検出部121に対応する構成である。Q値は、図1に示した第1特性111に対応する補償対象の特性であり、光受信装置900による信号光の受信品質を示す。
【0127】
Q値モニタ940は、検出したQ値を第1演算器561へ出力する。Q値モニタ940によって検出されるQ値は、光位相調整素子911において分岐された各信号光の位相差によって変化する。具体的には、Q値モニタ940によって検出されるQ値は、光位相調整素子911において分岐された各信号光の位相差が所定の位相差(たとえば1シンボル分の位相差)に近づくほど高くなる。
【0128】
<第1演算器および第1操作器について>
第1演算器561は、Q値モニタ940から出力されたQ値に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードバック制御を行う。具体的には、第1演算器561は、Q値が所定の範囲になるように光位相調整素子911の光位相を制御する。また、第1演算器561は、光位相調整素子911の光位相の制御を、第1操作器562が光位相調整素子911へ出力する位相操作値を制御することによって行う。
【0129】
たとえば、第1演算器561は、光位相調整素子911の光位相を適当な方向に変化させ、Q値が向上したか否かを判断する。第1演算器561は、Q値が向上した場合は光位相を同一の方向にさらに変化させ、Q値が劣化した場合は光位相を逆の方向に変化させる制御を繰り返す。第1演算器561によるフィードバック制御は、たとえば、遅延干渉計910において分岐された各信号光の位相差の100[MHz]程度のズレおよび100[MHz]程度以下のズレを補償可能な確度によって行われる。
【0130】
第1操作器562は、第1演算器561からの制御にしたがって、位相操作値を光位相調整素子911へ出力することで光位相調整素子911の光位相を操作する。たとえば、第1演算器561は第1操作器562へデジタル信号の位相操作値を出力する。第1操作器562は、第1演算器561から出力された位相操作値をアナログ信号に変換して光位相調整素子911へ出力する。また、第1操作器562は、更新制御回路501からの制御にしたがって、光位相調整素子911へ出力する位相操作値を固定可能である。位相操作値は、図1で説明したパラメータ113に対応するパラメータである。
【0131】
<第2演算器および第2操作器について>
第2演算器571は、温度センサ912から出力される温度検出値に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードフォワード制御を行う。具体的には、第2演算器571は、Q値が所定の範囲になるように光位相調整素子911の光位相を制御する。また、第1演算器561は、光位相調整素子911の光位相の制御を、第1操作器562が光位相調整素子911へ出力する位相操作値を制御することによって行う。また、第2演算器571は、イントロダイン検波方式の場合は、温度検出値に基づく局発光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。
【0132】
第1制御においては、第2演算器571は、温度検出値が所定の範囲に収まっていない場合に、位相操作値を変化させるように第2操作器572を制御する。第1制御においては、第2演算器571によるフィードフォワード制御は、イントロダイン検波方式の場合は、たとえば、信号光と局発光との間のMHzオーダの周波数のズレを補償可能な確度より低い確度によって行われる。
【0133】
なお、遅延干渉計910を用いた直接検波方式の場合は、第2演算器571は、温度検出値に基づく信号光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。また、第1制御においては、第2演算器571によるフィードフォワード制御は、たとえば、信号光のMHzオーダの周波数のズレを補償可能な確度より低い確度によって行われる。
【0134】
第2制御においては、第2演算器571は、温度検出値の変化量に基づく位相操作値を導出し、導出した位相操作値を出力するように第2操作器572を制御する。具体的には、第2演算器571には、温度検出値の変化量と位相操作値の変化量との関係を示す関係情報が記憶されている。第2演算器571は、温度センサ912から出力された温度検出値の変化量を補償する位相操作値の変化量を関係情報に基づいて導出し、導出した操作値の変化量に基づいて第2操作器572を制御する。
【0135】
第2操作器572は、第2演算器571からの制御にしたがって位相操作値を光位相調整素子911へ出力することで、光位相調整素子911の光位相を操作する。たとえば、第2演算器571は第2操作器572へデジタル信号の位相操作値を出力する。第2操作器572は、第2演算器571から出力された位相操作値をアナログ信号に変換して光位相調整素子911へ出力する。
【0136】
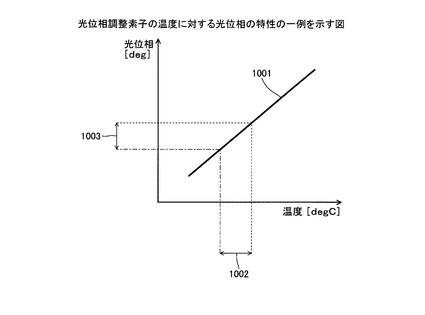
図10は、光位相調整素子の温度に対する光位相の特性の一例を示す図である。図10において、横軸は、光位相調整素子911の温度[degC]を示している。縦軸は、光位相調整素子911によって調整された信号光の光位相[deg]を示している。特性1001は、光位相調整素子911の温度に対する光位相の特性を示している。
【0137】
たとえば光位相調整素子911の光導波路がガラスである場合は、特性1001のように、光位相調整素子911は、温度に対して光位相(遅延量)がほぼ線形に変化する。したがって、光位相調整素子911の温度変化量1002に対する光位相のズレ量1003の比率(特性1001の傾き)はほぼ一定になる。
【0138】
(第2演算器による第2制御の具体例)
第1演算器561の停止中における第2演算器571による第2制御において、LD551の温度基準値は、第1演算器561のフィードバック制御を停止させた時の温度検出値とする。第2演算器571は、周期的に、第1演算器561のフィードバック制御を停止させた時の光位相調整素子911の温度(温度基準値)に対する現在の光位相調整素子911の温度の変化量を算出する。
【0139】
ここで、図10に示した光位相調整素子911の温度変化量1002に対する光位相のズレ量1003の比率(特性1001の傾き)を1/0.2=5[deg/degC]とする。たとえば、第2演算器571は、第1演算器561のフィードバック制御を停止させた時の光位相調整素子911の光位相を基準値とする光位相調整素子911の現在の光位相の変化量(ズレ量)を、たとえば下記(3)式によって算出することができる。
【0140】
((現在の温度検出値)−(温度基準値))×5 …(3)
【0141】
第2演算器571は、算出した光位相の変化量を補償するための位相操作値を算出し、算出した操作値となるように第2操作器572を制御する。たとえば、第2演算器571には、光位相調整素子911へ入力する位相操作値と光位相調整素子911の光位相との関係(たとえば比率)を示す関係情報が記憶されている。
【0142】
第2演算器571は、記憶された関係情報に基づいて、光位相調整素子911の光位相の変化を補償するための位相操作値の変化量を算出することができる。これにより、光位相調整素子911の光位相を、高い確度により、第1演算器561のフィードバック制御を停止させた時の光位相に維持することができる。
【0143】
なお、たとえば、遅延干渉計910の温度変化の最大値を2/60[degC/sec]とし、光位相調整素子911の光位相のズレの許容量を1[deg]とすると、位相操作値の更新は少なくとも6[sec]間隔で行うことが望ましい。
【0144】
また、第2演算器571は、算出した変化量によって位相操作値を変化させる場合に、光位相調整素子911の温度の変化に対する温度検出値の応答速度に応じた時定数によって位相操作値を変化させるとよい。光位相調整素子911の温度の変化に対する温度検出値の応答速度は、たとえば熱の伝達特性によって決まる。
【0145】
熱の伝達特性は、熱抵抗や熱容量によって決まり、たとえば電気回路モデルのRCフィルタなどによって近似することができる。したがって、第2演算器571は、熱の伝達特性に応じた時定数によって位相操作値を変化させるとよい。これにより、熱の伝達特性に起因する位相操作値の制御のばたつきを抑えることができる。
【0146】
(更新制御回路による更新制御)
図9に示した更新制御回路501による更新制御については、たとえば図7に示した更新制御と同様である。
【0147】
(光受信装置の変形例)
図11は、図9に示した光受信装置の変形例を示す図である。図11において、図9に示した部分と同様の部分については同一の符号を付して説明を省略する。図11に示すように、光受信装置900は、図9に示したQ値モニタ940に代えて誤り訂正器1110を備えていてもよい。識別器930は、データを誤り訂正器1110へ出力する。
【0148】
誤り訂正器1110は、識別器930から出力されたデータの誤り訂正を行う。誤り訂正器1110は、誤り訂正を行ったデータを出力する。また、誤り訂正器1110は、識別器930から出力されたデータの誤り数を第1演算器561へ出力する。データの誤り数は、図1に示した第1特性111に対応する補償対象の特性であり、光受信装置900による信号光の受信品質を示す。
【0149】
第1演算器561は、図9に示したQ値に代えて、誤り訂正器1110から出力された誤り数に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードバック制御を行う。また、図11に示すように、温度センサ912は、遅延干渉計910の外部に設けられ、遅延干渉計910の雰囲気温度を検出してもよい。この場合も、光位相調整素子911の温度を間接的に検出することができる。
【0150】
このように、実施の形態3にかかる光受信装置900によれば、フィードバック制御を行う第1演算器561の機能の更新中に第2演算器571により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器561の更新中においても光位相調整素子911における位相差の制御を安定させることができる。このため、通信品質を向上させることができる。
【0151】
以上説明したように、制御装置、光受信装置および制御方法においては、フィードバック制御を行う第1演算器122の機能の更新中に行う第2演算器126によるフィードフォワード制御において、検出値と操作量との関係情報を用いて操作量を導出する。これにより、確度の高い(系統誤差が小さい)制御を行い、第1演算器122の更新中の制御を安定させることができる。上述した各実施の形態に関し、さらに以下の付記を開示する。
【0152】
(付記1)処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作する第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させる更新制御部と、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記パラメータの操作が停止している場合に、前記取得部によって取得された関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する第2演算器と、
を備えることを特徴とする制御装置。
【0153】
(付記2)前記第2演算器は、前記関係情報に基づいて、前記第2特性の検出結果の変化量を補償する前記パラメータの操作量を導出し、導出した操作量によって前記パラメータを操作することを特徴とする付記1に記載の制御装置。
【0154】
(付記3)前記第2演算器は、前記第1演算器による前記パラメータの操作が停止される時の前記第2特性の検出結果を基準値として、前記第2特性の検出結果の前記基準値からの変動を補償する前記操作量を導出することを特徴とする付記2に記載の制御装置。
【0155】
(付記4)前記パラメータは第1パラメータおよび第2パラメータを含み、
前記更新制御部は、前記第1演算器による前記パラメータの操作が停止される時の前記第1パラメータと前記第1パラメータの可変範囲とに基づいて前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記1〜3のいずれか一つに記載の制御装置。
【0156】
(付記5)前記更新制御部は、前記第1パラメータの増加方向と減少方向の各可変範囲が閾値以上になるように前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記4に記載の制御装置。
【0157】
(付記6)前記第2特性は、第3特性および第4特性を含み、
前記パラメータは、前記第3特性を変化させる第1パラメータと、前記第4特性を変化させる第2パラメータと、を含み、
前記更新制御部は、前記第1演算器による前記パラメータの操作が停止される時の前記第3特性の検出結果と前記第3特性の可変範囲とに基づいて前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記1〜3のいずれか一つに記載の制御装置。
【0158】
(付記7)前記更新制御部は、前記第3特性の増加方向と減少方向の各可変範囲が閾値以上になるように前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記6に記載の制御装置。
【0159】
(付記8)前記更新制御部は、
前記第1演算器の機能を更新しない期間に、前記関係情報を用いずに前記パラメータを操作する第1制御を前記第2演算器に実行させ、
前記第1演算器の機能を更新する期間に、前記関係情報と前記第2特性の検出結果の変化量とに基づく操作量によって前記パラメータを操作する第2制御を前記第2演算器に実行させることを特徴とする付記1〜7のいずれか一つに記載の制御装置。
【0160】
(付記9)信号光と局発光とを干渉させ、干渉結果をデジタル処理する光受信装置において、
前記信号光と前記局発光との位相差の検出結果に基づいて、前記局発光を発振する半導体レーザの温度および前記半導体レーザの駆動電流の少なくともいずれかの操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記温度および前記半導体レーザの駆動電流の大きさの少なくともいずれかの変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度および前記駆動電流の大きさの少なくともいずれかの検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【0161】
(付記10)前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする付記9に記載の光受信装置。
【0162】
(付記11)信号光を分岐し、分岐した各信号光の位相差を調整して干渉させる遅延干渉計を有し、前記遅延干渉計による干渉結果に基づいて前記信号光が示すデータを識別する光受信装置において、
前記干渉結果に基づく前記信号光の受信品質の検出結果に基づいて、前記位相差の操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記遅延干渉計の温度の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度の検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【0163】
(付記12)前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする付記11に記載の光受信装置。
【0164】
(付記13)第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、
前記第1演算器による前記パラメータの操作が停止している場合に、取得した前記関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する、
ことを特徴とする制御方法。
【符号の説明】
【0165】
301〜303 補償値変化
304 許容範囲
550 ローカルオシレータ
552 LD温度調整部
553 LD電流調整部
940 Q値モニタ
1002 温度変化量
1003 ズレ量
【技術分野】
【0001】
本発明は、特性を制御する制御装置、光受信装置および制御方法に関する。
【背景技術】
【0002】
たとえば通信装置などの処理装置に含まれる演算器(演算回路)の機能を、処理装置の運転中に更新できるようにするFWDL(Firm−Ware Down−Load)が知られている。更新対象の演算器は、PLD(ProgrammAble Logic Device)、FPGA(Field Programmable Gate Array)、CPU(Central Processing Unit)などのプログラマブルなデバイスである。このような演算器は、たとえば、処理装置における特性の補償のためのフィードバック制御などで用いられている。
【0003】
また、処理装置における特性の補償のために、フィードバック制御とフィードフォワード制御を併用する構成が知られている。たとえば、光アンプモジュールの制御構成などにおいて、フィードバック制御のみでは制御困難な高速な変動をフィードフォワード制御により補償する構成が知られている。
【0004】
フィードバック制御においては、たとえば、補償対象の特性を検出し、検出結果に基づいて、補償対象の特性を変化させる操作値を調整する。フィードフォワード制御においては、たとえば、補償対象の特性を変化させる外乱などの特性を検出し、検出結果に基づいて、補償対象の特性を変化させる操作値を調整する。
【0005】
たとえば、処理装置の運転中に、フィードバック制御を行う演算器の機能を更新する場合は、操作値が過渡的に予期せぬ値に変動することを回避するために、フィードバック制御を一時停止させることが考えられる。また、たとえば更新対象の演算器が大規模である場合や、定義ファイルをダウンロードすることによって演算器の更新を行う場合は、更新に時間がかかり、たとえば更新に数十秒程度かかる場合がある。
【0006】
フィードバック制御を用いる処理装置としては、たとえば、信号光を受信するコヒーレント光受信装置がある。コヒーレント光受信装置においては、たとえば、信号光と局発光との位相差を補償するために、フィードバック制御によって局発光の周波数を調整する構成が知られている(たとえば、下記特許文献1〜4参照。)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2009−135930号公報
【特許文献2】特開2010−109847号公報
【特許文献3】特開2009−253971号公報
【特許文献4】特開2009−49613号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した従来技術では、フィードバック制御を行う演算器を停止させる際に、誤差(たとえば系統誤差)の大きいフィードフォワード制御だけでは、外乱などによる特性のばらつきを補償しきれなくなることがある。このため、フィードバック制御を行う演算器の機能を更新する場合に、処理装置の特性の制御を安定させることができないという問題がある。
【0009】
本発明は、上述した従来技術による問題点を解消するため、特性の制御を安定させることができる制御装置、光受信装置および制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した課題を解決し、目的を達成するため、本発明の一側面によれば、第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、前記第1演算器による前記パラメータの操作が停止している場合に、取得した関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する制御装置、光受信装置および制御方法が提案される。
【発明の効果】
【0011】
本発明の一側面によれば、特性の制御を安定させることができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施の形態1にかかる制御装置の構成例を示す図である。
【図2】図2は、更新制御回路による更新制御の一例を示すフローチャートである。
【図3−1】図3−1は、第1演算器の動作時の制御状態の一例を示す図である。
【図3−2】図3−2は、第1演算器の停止時に第2演算器の制御を変更しないと仮定した場合の制御状態の一例を示す参考図である。
【図3−3】図3−3は、第1演算器の停止時に第2演算器の制御を変更する場合の制御状態の一例を示す図である。
【図4】図4は、更新制御回路による更新制御の変形例を示すフローチャートである。
【図5】図5は、実施の形態2にかかる光受信装置の構成例を示す図である。
【図6】図6は、LDの特性の一例を示す図である。
【図7】図7は、更新制御回路による更新制御の例1を示すフローチャートである。
【図8】図8は、更新制御回路による更新制御の例2を示すフローチャートである。
【図9】図9は、実施の形態3にかかる光受信装置の構成例を示す図である。
【図10】図10は、光位相調整素子の温度に対する光位相の特性の一例を示す図である。
【図11】図11は、図9に示した光受信装置の変形例を示す図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照して、本発明にかかる制御装置、光受信装置および制御方法の実施の形態を詳細に説明する。
【0014】
(実施の形態1)
(制御装置の構成例)
図1は、実施の形態1にかかる制御装置の構成例を示す図である。図1に示す制御装置120は、処理装置110の第1特性111の変動を、処理装置110のパラメータ113を操作することによって補償する制御装置である。具体的には、制御装置120は、第1検出部121と、第1演算器122と、更新制御回路123と、第2検出部124と、取得部125と、第2演算器126と、を備えている。
【0015】
第1検出部121は、処理装置110の第1特性111を検出する。第1特性111は、制御装置120による制御対象(補償対象)の特性である。第1検出部121は、第1特性111の検出結果を第1演算器122へ出力する。
【0016】
第1演算器122は、第1検出部121から出力された第1特性111の検出結果に基づいて、処理装置110のパラメータ113を操作するフィードバック制御を行う。たとえば、第1演算器122は、パラメータ113の操作を指示する操作値を処理装置110へ出力することでパラメータ113を増加または低下させる。
【0017】
パラメータ113は、第1特性111を変化させるパラメータである。また、パラメータ113は、第1特性111を変化させる複数のパラメータ(たとえば第1パラメータと第2パラメータ)を含んでいてもよい。たとえば、第1演算器122は、第1特性111の検出結果が所定の範囲内になるまでパラメータ113を変化させる。
【0018】
また、第1演算器122は、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスである。具体的には、第1演算器122は、更新制御回路123によって新たなデータファイルを適用されることによって機能を更新可能である。
【0019】
更新制御回路123は、第1演算器122の機能を更新する更新制御部である。第1演算器122の機能の更新は、たとえば、第1演算器122によって行う演算に用いるアルゴリズムやデータの調整などである。また、更新制御回路123は、第1演算器122の機能を更新する場合に、第1演算器122によるパラメータ113の制御を停止させる。たとえば、更新制御回路123は、第1演算器122によるパラメータ113の操作値を固定させる。
【0020】
たとえば、更新制御回路123は、データファイル101をネットワークを介してダウンロードし、ダウンロードしたデータファイル101を第1演算器122に適用することで第1演算器122の機能を更新する。または、更新制御回路123は、記憶媒体に記憶されたデータファイル101を読み取り、読み取ったデータファイル101を第1演算器122に適用することで第1演算器122の機能を更新してもよい。また、更新制御回路123は、たとえばシリアル通信が可能なI2Cインターフェイス(マイクロワイア)を介して第1演算器122の機能を更新する。
【0021】
第2検出部124は、処理装置110の第2特性112を検出する。第2特性112は、第1特性111とは異なる処理装置110の特性であり、第1特性111を変化させる(第1特性111に作用する)特性である。また、第2特性112は、第1特性111を変化させる複数の特性(たとえば第3特性および第4特性)を含んでいてもよい。第2検出部124は、第2特性112の検出結果を第2演算器126へ出力する。
【0022】
取得部125は、パラメータ113の操作量(マイナスの操作量も含む)と、第2特性112の変化量(マイナスの変化量も含む)との関係を示す関係情報を取得する。関係情報は、たとえば、パラメータ113の操作値と第2特性112との比率を示す情報(関数)である。または、関係情報は、パラメータ113の操作量と、第2特性112の変化量と、を対応付けるテーブルなどであってもよい。
【0023】
たとえば、関係情報は制御装置120のメモリに記憶されており、取得部125は、メモリから関係情報を取得する。また、取得部125は、第2演算器126の動作時に外部(たとえば更新制御回路123)から関係情報を取得してもよい。なお、取得部125は、第2演算器126と同一の回路によって実現してもよい。
【0024】
第2演算器126は、更新制御回路123によって第1演算器122によるパラメータ113の制御が停止している場合に、確度の高いフィードフォワード制御によって第2特性112の変動を補償する。フィードフォワード制御の確度とは、ある一定の条件下で制御した値に生じうる誤差の度合いであり、制御の目標値に近いことを示す尺度である。具体的には、第2演算器126は、取得部125により取得された関係情報と、第2演算器126から出力された第2特性112の検出結果の変化量と、に基づく操作量によってパラメータ113を操作する。たとえば、第2演算器126は、パラメータ113の操作を指示する操作値を処理装置110へ出力することでパラメータ113を操作する。
【0025】
具体的には、第2演算器126は、関係情報に基づいて、第2特性112の検出結果の変化量を補償(相殺)するパラメータ113の操作量を導出する。そして、第2演算器126は、導出した操作量によってパラメータ113を操作する。たとえば、第2特性112の検出結果がΔ1だけ増加した場合は、第2特性112をΔ1だけ低下させる操作量Δ2を関係情報に基づいて導出する。そして、第2演算器126は、導出した操作量Δ2によってパラメータ113を操作する。
【0026】
これにより、第2特性112がΔ1だけ低下して元に戻る。このように、関係情報を用いることにより、第2特性112の変化量を補償するパラメータ113の操作量を導出することができる。このため、確度の高い制御によってパラメータ113を操作し、第2特性112の変動を補償することができる。
【0027】
したがって、第1演算器122による制御が停止していても、第2演算器126によって、第1特性111を変化させる第2特性112の変動を抑え、第1特性111の変動を抑えることができる。なお、第1演算器122による制御が停止していない場合は、第2演算器126は、関係情報を用いた制御を行ってもよいし、関係情報を用いない制御を行ってもよい。たとえば、第2演算器126は、関係情報を用いない制御として、第2特性112の検出結果が所定の範囲内になるまでパラメータ113を変化させる制御を行う。
【0028】
また、パラメータ113が複数のパラメータ(たとえば第1パラメータと第2パラメータ)を含む場合は、第2演算器126は、パラメータ113に含まれる複数のパラメータのうちの少なくともいずれかを操作する。この場合は、取得部125は、パラメータ113に含まれる複数のパラメータのそれぞれに関する関係情報を取得する。
【0029】
このように、制御装置120においては、フィードバック制御を行う第1演算器122の機能の更新中に第2演算器126により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器122の更新中の第1特性111の制御を安定させることができる。
【0030】
(更新制御回路による更新制御)
図2は、更新制御回路による更新制御の一例を示すフローチャートである。更新制御回路123は、第1演算器122の機能を更新する場合に、たとえば図2に示す各ステップを実行する。ここでは、第2演算器126が、第1演算器122の停止時には関係情報を用いた制御を行い、第1演算器122の動作時には関係情報を用いた制御を行わないとする。まず、更新制御回路123は、第1演算器122に制御を停止させる(ステップS201)。具体的には、更新制御回路123は、第1演算器122が出力する操作値を保持させる。
【0031】
つぎに、更新制御回路123は、第2演算器126による制御が安定したか否かを判断する(ステップS202)。たとえば、更新制御回路123は、第2演算器126から出力される操作値を一定の時間間隔で取得し、取得した操作値の変化量を算出する。そして更新制御回路123は、変化量が閾値より高ければ第2演算器126による制御が安定していないと判断し、変化量が閾値以下であれば第2演算器126による制御が安定したと判断する。
【0032】
ステップS202において、更新制御回路123は、第2演算器126による制御が安定するまで待つ(ステップS202:Noのループ)。第2演算器126による制御が安定すると(ステップS202:Yes)、更新制御回路123は、第1演算器122の機能の更新を開始する(ステップS203)。つぎに、更新制御回路123は、第2演算器126に、関係情報を用いた制御を開始させる(ステップS204)。
【0033】
つぎに、更新制御回路123は、ステップS203によって開始した第1演算器122の機能の更新が終了したか否かを判断し(ステップS205)、第1演算器122の機能の更新が終了するまで待つ(ステップS205:Noのループ)。第1演算器122の機能の更新が終了した場合(ステップS205:Yes)は、更新制御回路123は、第2演算器126に、関係情報を用いた制御を停止させる(ステップS206)。
【0034】
つぎに、更新制御回路123は、第1演算器122に制御を開始させ(ステップS207)、一連の更新制御を終了する。以上の各ステップにより、第1特性111の制御を行いながら、第1演算器122の機能を更新することができる。また、第1演算器122を更新している間は、第2演算器126によって関係情報を用いた制御を行うことで、第1特性111の制御を安定して行うことができる。
【0035】
また、第1演算器122の制御を停止させた後、第2演算器126による制御が安定するのを待ってから第2演算器126に関係情報を用いた制御を開始させることで、第2演算器126による関係情報を用いた制御のばたつきを抑えることができる。
【0036】
なお、第1演算器122による制御中も第2演算器126に関係情報を用いた制御を実行させる場合は、ステップS204,S206を省いてもよい。また、第1演算器122によるフィードバック制御の応答速度より、第2演算器126による関係情報を用いない制御の応答速度の方が十分に速い(たとえば10倍以上速い)場合には、各制御が互いに干渉を起こさない。このため、ステップS206を省いても、第2演算器126による関係情報を用いた制御のばたつきを抑えることができる。
【0037】
(制御状態の例)
ここでは、第2演算器126が、第1演算器122の動作時には関係情報を用いた制御を行い、第1演算器122の停止時には関係情報を用いない制御を行う場合の第1特性111の制御状態の例について説明する。
【0038】
図3−1は、第1演算器の動作時の制御状態の一例を示す図である。図3−1において、横軸は時間を示し、縦軸は第1特性111の補償値を示している。補償値変化301は、第1演算器122のフィードバック制御による補償値の変化を示している。補償値変化302は、関係情報を用いずに第2演算器126が行う制御による補償値の変化を示している。補償値変化303は、第1特性111の実際の補償値であり、補償値変化301と補償値変化302を加算した補償値の変化である。
【0039】
許容範囲304は、処理装置110において許容される第1特性111の補償値の範囲である。第2演算器126による関係情報を用いない制御は、確度が悪いため、補償値変化302は許容範囲304から逸脱している。一方、第1演算器122の確度がよいため、補償値変化301は補償値変化302を補償するように変化している。このため、補償値変化303に示すように、実際の補償値は許容範囲304に収まっている。
【0040】
図3−2は、第1演算器の停止時に第2演算器の制御を変更しないと仮定した場合の制御状態の一例を示す参考図である。図3−2において、図3−1に示した部分と同様の部分については説明を省略する。時点t1から時点t2までの期間において、第1演算器122の機能の更新を行い、補償値変化301に示すように、第1演算器122によるフィードバック制御を停止したとする。
【0041】
そして、時点t1から時点t2までの期間において、第2演算器126の制御を、関係情報を用いた制御に変更しないと仮定する。この場合は、図3−2の補償値変化303に示すように、外乱などによって第2演算器126による制御が動作するにつれて、補償値変化303が許容範囲304から外れていく。
【0042】
図3−3は、第1演算器の停止時に第2演算器の制御を変更する場合の制御状態の一例を示す図である。図3−3において、図3−2に示した部分と同様の部分については説明を省略する。更新制御回路123は、時点t1から時点t2までの期間において、第2演算器126の制御を、関係情報を用いた制御に変更する。
【0043】
また、切り替え後の第2演算器126のフィードフォワード制御は、第1演算器を停止させた時点t1における検出値を基準値とし、検出値を基準値に保つように行う制御とする。これにより、補償値変化303に示すように、実際の補償値は許容範囲304に収まっている。また、更新制御回路123は、時点t2において第1演算器122によるフィードバック制御を再開すると、第2演算器126の制御を元に戻す。
【0044】
(更新制御の変形例)
図4は、更新制御回路による更新制御の変形例を示すフローチャートである。更新制御回路123は、第1演算器122の機能を更新する場合に、たとえば図4に示す各ステップを実行する。ここでは、第2演算器126が、第1演算器122の停止時には関係情報を用いた制御を行い、第1演算器122の動作時には関係情報を用いた制御を行わないとする。また、パラメータ113は、第1パラメータと第2パラメータを含むとする。
【0045】
まず、更新制御回路123は、第1パラメータの可変範囲と、現在の第1パラメータと、を取得する(ステップS401)。たとえば、第1パラメータの可変範囲は、制御装置120のメモリにあらかじめ記憶されており、更新制御回路123はメモリから第1パラメータの可変範囲を取得する。また、更新制御回路123は、処理装置110へ出力される第1パラメータを取得することによって現在の第1パラメータを取得する。
【0046】
つぎに、更新制御回路123は、ステップS401によって取得した第1パラメータの可変範囲と現在の第1パラメータとに基づいて、現在の第1パラメータの各方向(増加方向と減少方向)の可変量を算出する(ステップS402)。たとえば、第1パラメータの上限と現在の第1パラメータの差分を算出することにより、現在の第1パラメータの増加方向の可変量を算出することができる。また、第1パラメータの下限と現在の第1パラメータの差分を算出することにより、現在の第1パラメータの減少方向の可変量を算出することができる。
【0047】
つぎに、更新制御回路123は、ステップS402によって算出した各方向の可変量が閾値以上か否かを判断する(ステップS403)。少なくともいずれかの方向の可変量が閾値以上でない場合(ステップS403:No)は、更新制御回路123は、可変量が閾値以上でない方向の可変量が閾値以上となる第2パラメータを算出する(ステップS404)。つぎに、更新制御回路123は、ステップS404によって算出した第2パラメータとなるように処理装置110の第2パラメータを操作する(ステップS405)。
【0048】
つぎに、更新制御回路123は、所定時間待機し(ステップS406)、ステップS403へ戻る。ステップS406によって待機する所定時間は、たとえば、第2パラメータの操作による第1パラメータの変化が収束するのに十分な時間とする。
【0049】
ステップS403において、ステップS402によって算出した各方向の可変量が閾値以上である場合(ステップS403:Yes)は、更新制御回路123は、ステップS407へ移行する。図4に示すステップS407〜S413は、図2に示したステップS201〜S207と同様である。
【0050】
以上の各ステップにより、第1演算器122を停止する時の第1パラメータと、第1パラメータの可変範囲と、に基づいて第1パラメータおよび第2パラメータを調整してから第1演算器122を停止することができる。具体的には、第2演算器126が操作する第1パラメータの増加方向と減少方向の各可変範囲が閾値以上になるように第1パラメータおよび第2パラメータを調整する。
【0051】
第1パラメータおよび第2パラメータはともに第1特性111を変化させるパラメータであるため、第2パラメータを調整することで第1パラメータを変化させることができる。これにより、第2演算器126による制御における第1パラメータの増加方向と減少方向の各可変範囲を確保し、第1特性111を安定して制御することができる。
【0052】
また、第2特性112が第3特性と第4特性を含み、第1パラメータは第3特性を変化させ、第2パラメータは第4特性を含むパラメータである場合について説明する。この場合は、第1演算器122を停止する時の第2特性112の検出結果と第2特性112の可変範囲とに基づいて第1パラメータおよび第2パラメータを調整してもよい(たとえば図8参照)。
【0053】
第1パラメータおよび第2パラメータはともに第1特性111を変化させるパラメータであるため、第2パラメータを調整することで第1パラメータを変化させることができる。これにより、第2演算器126による制御における第2特性112の増加方向と減少方向の各可変範囲を確保し、第1特性111を安定して制御することができる。
【0054】
このように、実施の形態1にかかる制御装置120においては、フィードバック制御を行う第1演算器122の機能の更新中に第2演算器126により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。関係情報を用いることで、検出値の変化量をキャンセルできる操作量を導出することができるため、フィードフォワード制御の確度を向上させる(系統誤差を小さくする)ことができる。このため、第1演算器122の更新中の第1特性111の制御を安定させることができる。
【0055】
また、第1演算器122によるパラメータ113の制御が停止される時の第2特性112の検出結果を基準値として、第2特性112の検出結果の基準値からの変動を補償するパラメータ113の操作量を導出してもよい。これにより、第1演算器122による制御が停止中の第2特性112を、第1演算器122による制御が停止した時の状態に維持することができる。このため、第1演算器122による制御が停止中の第1特性111の変動を抑えることができる。
【0056】
また、第1演算器122の制御を停止させる前に第1パラメータを調整しておけば、第1パラメータの増加方向と減少方向の各可変範囲を確保して第2演算器126によるフィードフォワード制御を行うことができる。このため、第1特性111をさらに安定して制御することができる。
【0057】
また、更新制御回路123が、第1演算器122の更新のタイミングに基づいて第2演算器126の制御を切り替えることで、第1演算器122による制御と、第2演算器126による制御と、の干渉を抑え、第1特性111の制御を安定させることができる。
【0058】
(実施の形態2)
(光受信装置の構成例)
図5は、実施の形態2にかかる光受信装置の構成例を示す図である。図5に示す光受信装置500は、図1に示した制御装置120を適用した光受信装置である。光受信装置500は、イントラダイン検波方式(Intradyne method)によって信号光を受信するコヒーレント光受信装置である。光受信装置500は、光ハイブリッド回路510と、光電変換器520と、ADC530と、DSP540と、ローカルオシレータ550と、第1演算器561と、第1操作器562と、第2演算器571と、第2操作器572と、を備えている。
【0059】
<光受信回路について>
光ハイブリッド回路510、光電変換器520、ADC530、DSP540およびローカルオシレータ550は、図1に示した処理装置110に対応する構成であり、イントラダイン検波方式によって信号光を受信する光受信回路である。
【0060】
光ハイブリッド回路510は、光受信装置500へ入力された信号光と、ローカルオシレータ550から出力された局発光と、を複数の異なる位相で干渉させる(混合する)。たとえば、光ハイブリッド回路510は、信号光と局発光とを0°と90°の位相で干渉させる90°ハイブリッド回路である(90deg Hybrid)。光ハイブリッド回路510は、干渉により得られた各ビート信号光(干渉結果)を光電変換器520へ出力する。各ビート信号光は、光受信装置500へ入力された信号光の振幅と位相を示す信号となる。
【0061】
光電変換器520は、光ハイブリッド回路510から出力された各ビート信号光を光電変換し、光電変換した各ビート信号をADC530へ出力する。ADC530(Analog/Digital Converter)は、光電変換器520から出力された各ビート信号をデジタル信号に変換する。ADC530は、デジタル信号に変換した各ビート信号をDSP540へ出力する。
【0062】
DSP540(Digital Signal Processor)は、ADC530から出力された各ビート信号のデジタル処理を行うことで、各ビート信号を復調し、光受信装置500へ入力された信号光が示すデータを識別する。また、DSP540は、光位相算出器541を有する。光位相算出器541は、ADC530から出力された各ビート信号のデジタル処理により、ローカルオシレータ550から出力される局発光と、光受信装置500へ入力される信号光と、の位相差(位相ズレ)を算出(推定)する。
【0063】
光位相算出器541は、図1に示した第1検出部121に対応する構成である。局発光と信号光との位相差は、図1に示した第1特性111に対応する補償対象の特性である。また、局発光と信号光との位相差は、ローカルオシレータ550から出力される局発光の周波数と、信号光のキャリア中心周波数と、のズレによって生じる。信号光のキャリア中心周波数は、送信側の光源の発振周波数によって決まる。光位相算出器541は、算出した位相差を示す位相差算出値を第1演算器561へ出力する。
【0064】
<ローカルオシレータについて>
ローカルオシレータ550(Lo OSC)は、LD551と、LD温度調整部552と、LD電流調整部553と、LD温度モニタ554と、LD電流モニタ555と、を備えている。LD温度モニタ554およびLD電流モニタ555は、図1に示した第2検出部124に対応する構成である。
【0065】
LD551(Laser Diode:半導体レーザ)は、局発光(局部発振光)を発振して光ハイブリッド回路510へ出力する。LD551が発振する局発光は、たとえばCW光(Continuous Wave:連続光)である。LD551の温度およびLD551へ供給される駆動電流の大きさは、図1で説明した第2特性112に対応する特性である。たとえばLD551の温度は第3特性に対応し、LD551へ供給される駆動電流の大きさは第4特性に対応する。
【0066】
LD551は、たとえばDFB(Distributed Feed−Back:分布帰還型)レーザである。または、LD551は、DBR(Distributed Bragg Reflector:分布反射型)レーザなどであってもよい。LD551が発振する局発光の周波数は、LD551の温度や、LD551を駆動する駆動電流の大きさによって変化する(たとえば特開平8−316576号公報参照)。
【0067】
LD温度調整部552は、入力される温度操作値に応じてLD551の温度を調整する。LD温度調整部552は、たとえば、ヒータなどの加熱素子やペルチェ素子などの加熱および冷却ができる素子である。
【0068】
LD電流調整部553は、入力される操作値に応じてLD551へ供給される駆動電流の大きさを調整する。たとえば、LD電流調整部553には、駆動電流が操作値として入力される。この場合は、LD電流調整部553は、入力された駆動電流をLD551へ供給する。また、LD電流調整部553には、操作値として駆動電流の大きさを指示する制御信号が入力されてもよい。この場合は、LD電流調整部553は、入力された制御信号に基づいて、電源からLD551へ供給される駆動電流を調整する。
【0069】
LD温度モニタ554は、LD551の温度をモニタする。LD温度モニタ554は、温度のモニタ結果を示す温度モニタ値を第2演算器571へ出力する。LD電流モニタ555は、LD551の駆動電流の大きさをモニタする。LD電流モニタ555は、駆動電流の大きさのモニタ結果を示す電流モニタ値を第2演算器571へ出力する。
【0070】
<第1演算器および第1操作器について>
第1演算器561および第1操作器562は、図1に示した第1演算器122に対応する構成である。第1演算器561は、光位相算出器541から出力された位相差算出値に基づいて、ローカルオシレータ550から出力される局発光の周波数を制御し、局発光と信号光との位相差を補償するフィードバック制御を行う。
【0071】
具体的には、第1演算器561は、位相差算出値が示す位相差が所定の範囲になるように局発光の周波数を制御する。また、第1演算器561は、局発光の周波数の制御を、LD551の温度を制御することによって行う。また、第1演算器561は、LD551の温度の制御を、第1操作器562がローカルオシレータ550へ出力する温度操作値を制御することによって行う。
【0072】
たとえば、第1演算器561は、位相差算出値に基づいて、局発光の周波数が信号光の周波数より高い場合は、局発光の周波数が一定量低下するようにLD551の温度を制御する。また、第1演算器561は、局発光の周波数が信号光の周波数より低い場合は、局発光の周波数が一定量増加するようにLD551の温度を制御する。第1演算器561によるフィードバック制御は、たとえば、信号光と局発光との間の100[MHz]程度以下の周波数のズレを補償可能な確度によって行われる。
【0073】
また、第1演算器561は、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスである。具体的には、第1演算器561は、更新制御回路501からの制御によって機構を更新可能である。
【0074】
第1操作器562は、第1演算器561からの制御にしたがって、温度操作値をLD温度調整部552へ出力することでLD551の温度を操作する。たとえば、第1演算器561は第1操作器562へデジタル信号の温度操作値を出力する。第1操作器562は、第1演算器561から出力された温度操作値をアナログ信号に変換してLD温度調整部552へ出力する。また、第1操作器562は、更新制御回路501からの制御にしたがって、LD温度調整部552へ出力する温度操作値を固定可能である。温度操作値は、図1で説明したパラメータ113の第1パラメータに対応するパラメータである。
【0075】
<第2演算器および第2操作器について>
第2演算器571および第2操作器572は、図1に示した第2演算器126に対応する構成である。第2演算器571は、ローカルオシレータ550から出力されるモニタ値に基づいて、ローカルオシレータ550から出力される局発光の周波数を制御し、局発光と信号光との位相差を補償するフィードフォワード制御を行う。ローカルオシレータ550から出力されるモニタ値は、たとえば、温度情報および電流情報の少なくともいずれかである。
【0076】
具体的には、第2演算器571は、局発光の周波数の制御を、LD551の温度および駆動電流の少なくともいずれかを制御することによって行う。また、第2演算器571は、LD551の温度の制御を、第2操作器572がローカルオシレータ550へ出力する温度操作値を制御することによって行う。また、第2演算器571は、LD551の駆動電流の制御を、第2操作器572がローカルオシレータ550へ出力する電流操作値を制御することによって行う。
【0077】
また、第2演算器571は、モニタ値に基づく局発光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。たとえば、第2演算器571は、第1制御および第2制御を実行する機能を有しており、更新制御回路501からの制御信号によって第1制御と第2制御とを切り替えて実行する。または、第2演算器571は、更新制御回路501によって機能を更新(書き換え)可能な回路であり、更新制御回路501による更新によって第1制御と第2制御とを切り替えて実行してもよい。
【0078】
第1制御においては、第2演算器571は、モニタ値が所定の範囲に収まっていない場合に、操作値(温度操作値および電流操作値の少なくともいずれか)を変化させるように第2操作器572を制御する。第1制御においては、第2演算器571によるフィードフォワード制御は、たとえば、信号光と局発光との間の100[MHz]程度の周波数のズレおよび100[MHz]程度以下の周波数のズレを補償可能な確度より低い確度によって行われる。
【0079】
第2制御においては、第2演算器571は、モニタ値の変化量に基づく操作値(温度操作値および電流操作値の少なくともいずれか)の変化量を導出し、導出した変化量によって操作値を変化させるように第2操作器572を制御する。具体的には、第2演算器571には、モニタ値と操作値との関係(たとえば比率)を示す関係情報が記憶されている。第2演算器571は、ローカルオシレータ550から出力されたモニタ値の変化量を補償する操作値の変化量を関係情報に基づいて導出し、導出した操作値の変化量に基づいて第2操作器572を制御する。
【0080】
また、関係情報は、たとえば、モニタ値と局発光の周波数との関係を示す第1関係情報と、局発光の周波数と操作値とを対応付ける第2関係情報と、の組み合わせであって、モニタ値と操作値との関係を間接的に示す情報でもよい。または、関係情報は、たとえば、モニタ値と操作値との関係を直接的に対応付ける関係情報であってもよい。
【0081】
このように、第2制御においては、関係情報を用いることにより、第1制御よりも高い確度によって局発光と信号光との位相差を補償することができる。第2演算器571は、たとえば、外部から機能を更新可能なPLD、FPGA、CPUなどのプログラマブルなデバイスによって実現することができる。
【0082】
第2操作器572は、第2演算器571からの制御にしたがって温度操作値をLD温度調整部552へ出力することで、ローカルオシレータ550のLD551の温度を操作する。また、第2操作器572は、第2演算器571からの制御にしたがって電流操作値をLD電流調整部553へ入力することでLD551の駆動電流を操作する。
【0083】
たとえば、第2演算器571は第2操作器572へデジタル信号の温度操作値を出力する。第2操作器572は、第2演算器571から出力された温度操作値をアナログ信号に変換してLD温度調整部552へ出力する。また、たとえば、第2演算器571は第2操作器572へデジタル信号の電流操作値を出力する。第2操作器572は、第2演算器571から出力された電流操作値をアナログ信号に変換してLD電流調整部553へ出力する。また、電流操作値は、図1で説明したパラメータ113の第2パラメータに対応するパラメータである。
【0084】
<更新制御回路について>
更新制御回路501は、図1に示した更新制御回路123に対応する構成である。第1演算器561の機能を更新する。たとえば、更新制御回路501は、ネットワークからデータファイル502をダウンロードし、ダウンロードしたデータファイル502に基づいて第1演算器561の機能を更新する。また、更新制御回路501は、第1演算器561の機能を更新する場合に、第1演算器561によるフィードバック制御を停止させる。
【0085】
また、更新制御回路501は、第1演算器561によるフィードバック制御を停止させる期間は、第1操作器562が出力する温度操作値を保持するように第1操作器562を制御する。また、更新制御回路501は、第1演算器561のフィードバック制御の実行中は第2演算器571による制御を第1制御に設定し、第1演算器561のフィードバック制御の停止中は第2演算器571による制御を第2制御にする。更新制御回路501は、たとえば外部から機能を更新可能なPLD、FPGA、CPUなどによって実現することができる。
【0086】
(LDの特性)
図6は、LDの特性の一例を示す図である。図6においては、一例としてDFBレーザを適用したLD551の特性について説明する。図6の横軸はLD551へ供給される駆動電流[mA]を示し、縦軸はLD551から出力される局発光の波長[nm]を示している。特性601〜605は、それぞれLD551の温度が45,40,35,30,25[degC]である場合の、駆動電流に対する局発光の波長の特性を示している。
【0087】
特性601〜605に示すように、LD551から出力される局発光の波長は、駆動電流が大きくなるほど長くなる。したがって、LD551から出力される局発光の周波数は、駆動電流が大きくなるほど低くなる。また、LD551から出力される局発光の波長は、LD551の温度が高くなるほど長くなる。したがって、LD551から出力される局発光の周波数は、LD551の温度が高くなるほど低くなる。
【0088】
たとえば、LD551から出力される局発光の波長の目標値を1512.5[nm]とすると、座標点606に示すように、LD551の温度を40[degC]、駆動電流を100[mA]とすればよい。これに対して、たとえば、外乱などによってLD551の温度が43[degC]、駆動電流が110[mA]となると、座標点607に示すように、局発光の波長はおよそ1513.2[nm]となる。
【0089】
(第2演算器による第2制御の具体例)
つぎに、第2演算器571による第2制御の一例について説明する。ここでは、光受信装置500の通常運転時に、第1演算器561のフィードバック制御によって、第1操作器562から出力される温度操作値は+1[degC]に収束しているものとする。
【0090】
また、LD551から出力される局発光の波長の目標値を1512.5[nm]とする。この場合は、第2演算器571によるフィードフォワード制御によって、LD551の温度を40[degC]、駆動電流を100[mA](図6の座標点606を参照)とするように各操作値を制御する。ここで、第2演算器571に対して、LD551の温度が43[degC]であることを示す温度モニタ値と、駆動電流が110[mA]であることを示す電流モニタ値と、が入力されたとする(図6の座標点607を参照)。
【0091】
第1演算器561によるフィードフォワード制御による操作値とフィードバック制御による操作値を単純に加算するとLD温度は40+1=41[degC]、LD電流は100[mA]となる。ただし、ここでは、絶対値の確度がないため、それぞれ+2[degC]、+10[mA]のズレが生じている状態とする。
【0092】
第2演算器571には、LD551の温度と局発光の周波数との関係を示す関数と、LD551の駆動電流と局発光の周波数との関係を示す関数と、があらかじめ記憶されている。たとえば、図6に示したように、LD551の温度と局発光の波長との比率が0.5[nm]/5[degC]=0.1[nm/degC]であるとする。また、光周波数の変化Δ100[GHz]に対する光波長変化を−Δ0.8[nm]とすると、LD551の温度と局発光の周波数との比率は−12.5[GHz/degC]となる。
【0093】
また、図6に示したように、LD551の駆動電流と局発光の波長との比率が1.5[nm]/40[mA]=0.035[nm/mA]であるとする。また、光周波数の変化Δ100[GHz]に対する光波長変化を−Δ0.8[nm]とすると、LD551の駆動電流と局発光の周波数との比率は−4.375[GHz/mA]となる。
【0094】
たとえば、光周波数100[MHz]の分解能によって制御を行うためには、LD温度モニタ554および第2操作器572は少なくとも80[mdegC]の分解能を有するようにする。また、LD電流モニタ555および第2操作器572は少なくとも23[uA]の分解能を有するようにする。
【0095】
第1演算器561の停止中における第2演算器571による第2制御において、LD551の温度基準値は、第1演算器561のフィードバック制御を停止させた時の温度モニタ値とする。また、第1演算器561の停止中における第2演算器571による第2制御において、電流基準値は、第1演算器561のフィードバック制御を停止させた時の電流モニタ値とする。第2演算器571は、周期的に、第1演算器561のフィードバック制御を停止させた時の局発光の周波数に対する現在の局発光の周波数の変化量を算出する。
【0096】
たとえば、第2演算器571は、LD551の温度の変化による局発光の周波数の変化量を、たとえば下記(1)式によって算出することができる。また、第2演算器571は、LD551の駆動電流の変化による局発光の周波数の変化量を、たとえば下記(2)式によって算出することができる。
【0097】
((現在の温度モニタ値)−(温度基準値))*(−12.5) …(1)
【0098】
((現在の電流モニタ値)−(電流基準値))*(−4.375) …(2)
【0099】
第2演算器571は、上記(1)式および(2)式の算出結果を加算することで、第1演算器561のフィードバック制御を停止させた時の局発光の周波数に対する、現在の局発光の周波数の変化(ズレ)を算出することができる。第2演算器571は、算出した周波数の変化量を補償するための温度操作値および電流操作値の少なくとも一方の変化量を算出し、算出した変化量に基づいて第2操作器572を制御する。
【0100】
たとえば、第2演算器571には、LD温度調整部552へ入力する温度操作値とLD551の温度との関係(たとえば比率)を示す関係情報が記憶されている。また、第2演算器571には、LD電流調整部553へ入力する電流操作値とLD551の駆動電流との関係(たとえば比率)を示す関係情報が記憶されている。
【0101】
第2演算器571は、記憶された関係情報に基づいて、周波数の変化を補償するための温度操作値および電流操作値の少なくとも一方の変化量を算出することができる。これにより、局発光の周波数を、高い確度により、第1演算器561のフィードバック制御を停止させた時の周波数に維持することができる。
【0102】
(更新制御回路による更新制御)
図7は、更新制御回路による更新制御の例1を示すフローチャートである。更新制御回路501は、第1演算器561の機能を更新する場合に、たとえば図7に示す各ステップを実行する。初期状態においては、第2演算器571は、第1制御を行っているとする。まず、更新制御回路501は、第1操作器562に現在の操作値を保持させる(ステップS701)。つぎに、更新制御回路501は、第2操作器572から出力される操作値(温度操作値および電流操作値)が安定したか否かを判断する(ステップS702)。
【0103】
たとえば、更新制御回路501は、第2操作器572から出力される各操作値を一定の時間間隔で取得し、取得した操作値の変化量を算出する。そして、更新制御回路501は、算出した変化量が閾値より高ければ操作値が安定していないと判断し、算出した変化量が閾値以下であれば操作値が安定したと判断する。
【0104】
ステップS702において、更新制御回路501は、操作値が安定するまで待つ(ステップS702:Noのループ)。操作値が安定すると(ステップS702:Yes)、更新制御回路501は、第1演算器561の機能の更新を開始する(ステップS703)。つぎに、更新制御回路501は、第2演算器571に第2制御を開始させる(ステップS704)。これにより、第2演算器571は、関係情報を用いた確度のよいフィードフォワード制御を開始する。
【0105】
つぎに、更新制御回路501は、ステップS703によって開始した第1演算器561の機能の更新が終了したか否かを判断し(ステップS705)、第1演算器561の機能の更新が終了するまで待つ(ステップS705:Noのループ)。第1演算器561の機能の更新が終了した場合(ステップS705:Yes)は、更新制御回路501は、第2演算器571に第1制御を開始させる(ステップS706)。これにより、第2演算器571によるフィードフォワード制御は、通常時の第1制御に戻る。
【0106】
つぎに、更新制御回路501は、第1演算器561にフィードバック制御を開始させ(ステップS707)、一連の制御を終了する。以上の各ステップにより、光受信装置500による光受信を行いながら、第1演算器561の機能を更新することができる。また、第1操作器562を更新している間は、第2演算器571に確度のよいフィードフォワード制御を実行させることで、第1操作器562によるフィードバック制御を停止しても位相差の補償を安定して行うことができる。
【0107】
図8は、更新制御回路による更新制御の例2を示すフローチャートである。更新制御回路501は、第1演算器561の機能を更新する場合に、たとえば図8に示す各ステップを実行してもよい。まず、更新制御回路501は、LD551の温度の可変範囲と、LD551の現在の温度と、を取得する(ステップS801)。たとえば、LD551の温度の可変範囲は、光受信装置500のメモリにあらかじめ記憶されており、更新制御回路501はメモリからLD551の温度の可変範囲を取得する。また、更新制御回路501は、LD温度モニタ554から出力される温度モニタ値を取得することによって取得する。
【0108】
つぎに、更新制御回路501は、ステップS801によって取得した温度の可変範囲と現在の温度とに基づいて、LD551の温度の各方向(増加方向と減少方向)の可変量を算出する(ステップS802)。たとえば、LD551の温度の上限と現在のLD551の温度の差分を算出することにより、現在のLD551の温度の増加方向の可変量を算出することができる。また、LD551の温度の下限と現在のLD551の温度の差分を算出することにより、現在のLD551の温度の減少方向の可変量を算出することができる。つぎに、更新制御回路501は、ステップS802によって算出した各方向の可変量が閾値以上か否かを判断する(ステップS803)。
【0109】
ステップS803において、少なくともいずれかの方向の可変量が閾値以上でない場合(ステップS803:No)は、更新制御回路501は、可変量が閾値以上でない方向の可変量が閾値以上となるLD551の駆動電流を算出する(ステップS804)。つぎに、更新制御回路501は、第2操作器572を制御して、ステップS804によって算出した駆動電流となるようにLD551の駆動電流を操作する(ステップS805)。
【0110】
つぎに、更新制御回路501は、所定時間待機し(ステップS806)、ステップS803へ戻る。ステップS806によって待機する所定時間は、たとえば、LD551の駆動電流の操作によるLD551の温度の変化が収束するのに十分な時間とする。
【0111】
ステップS803において、ステップS802によって算出した各方向の可変量が閾値以上である場合(ステップS803:Yes)は、更新制御回路501は、ステップS807へ移行する。図8に示すステップS807〜S813は、図7に示したステップS701〜S707と同様である。
【0112】
以上の各ステップにより、第1演算器561を停止する時のLD551の温度の検出結果とLD551の温度の可変範囲とに基づいてLD551の温度および駆動電流の大きさを調整してから第1演算器561を停止することができる。具体的には、LD551の温度の増加方向と減少方向の各可変範囲が閾値以上になるようにLD551の温度および駆動電流の大きさを調整する。
【0113】
LD551の温度および駆動電流の大きさはともに局発光の周波数を変化させるパラメータであるため、駆動電流の大きさを調整することでLD551の温度を変化させることができる。これにより、第2演算器571による制御におけるLD551の温度の増加方向と減少方向の各可変範囲を確保し、局発光と信号光との位相差を安定して制御することができる。
【0114】
(駆動電流の大きさの調整の具体例)
たとえば、上記のように、第2演算器571による操作値について、LD551の温度を40[degC]、駆動電流を100[mA]に設定したとする。また、第2演算器571の制御によるLD551の温度の可変範囲は36〜40.5[degC]とする。また、第2演算器571の制御によるLD551の駆動電流の可変範囲は90〜105[mA]とする。
【0115】
この場合は、第2演算器571は、現在設定しているLD551の温度をΔ−4〜Δ+0.5[degC]の幅で更新可能である。また、第2演算器571は、現在設定しているLD551の駆動電流をΔ−10[mA]〜Δ+5[mA]の幅で更新可能である。したがって、たとえばLD551の温度の増加方向への可変量がΔ+0.5[degC]と小さい状態である。
【0116】
これに対して、たとえば、LD551の駆動電流を操作することで、LD551の温度を2[degC]だけ低下させて38[degC]として、第2演算器571による第2制御を行う。これにより、第2演算器571は、第2制御において、現在設定しているLD551の温度をΔ−2〜Δ+2.5[degC]の幅で更新可能になる。このため、外乱によってたとえば温度が2.5[degC]低下しても、第2演算器571は、LD551の温度を2.5[degC]増加させることができるため、LD551の温度を一定に保つことができる。
【0117】
このように、実施の形態2にかかる光受信装置500によれば、フィードバック制御を行う第1演算器561の機能の更新中に第2演算器571により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器561の更新中においても局発光と信号光との位相差の制御を安定させることができる。このため、通信品質を向上させることができる。
【0118】
また、たとえば、図5に示したローカルオシレータ550、第2演算器571および第2操作器572は、ITLA(Integrable Tunable Laser Assembly:波長可変レーザアセンブリ)モジュールによって実現される。これに対して、第1演算器561および第1操作器562は、たとえば、ITLAモジュールとは別に構成されるプログラマブルなデバイスであり、大規模な構成となる。
【0119】
これに対して、光受信装置500は、第1演算器561および第1操作器562によるフィードバック制御の停止中に行う確度のよい制御を第2演算器571および第2操作器572によるフィードフォワード制御によって実現する。このため、たとえばITLAモジュールとは別に第1演算器561および第1操作器562と同様のフィードバック制御を行う回路を設ける場合に比べて、回路規模を小さくすることができる。
【0120】
(実施の形態3)
図9は、実施の形態3にかかる光受信装置の構成例を示す図である。図9において、図5に示した部分と同様の部分については同一の符号を付して説明を省略する。図9に示す光受信装置900は、図1に示した制御装置120を適用した光受信装置である。光受信装置900は、遅延干渉計910と、光電変換器920と、識別器930と、Q値モニタ940と、第1演算器561と、第1操作器562と、第2演算器571と、第2操作器572と、を備えている。
【0121】
<光受信回路について>
遅延干渉計910、光電変換器920および識別器930は、図1に示した処理装置110に対応する構成であり、たとえばDQPSK(Differential Quadrature Phase Shift Keying:差動四位相偏移変調)などにより変調された信号光を受信する光受信回路である。
【0122】
遅延干渉計910は、光受信装置900へ入力された信号光を分岐し、分岐した各信号光にたとえば1シンボル分の位相差を与え、位相差を与えた各信号光を干渉させて光電変換器920へ出力する。遅延干渉計910は、光位相調整素子911と、温度センサ912と、を備えている。
【0123】
光位相調整素子911は、分岐された各信号光に位相差を与える。たとえば、光位相調整素子911は、分岐された各信号光の一方の光位相(遅延量)を、入力された位相操作値に応じた光位相に調整することで、分岐された各信号光に位相差を与える。たとえば、光位相調整素子911は、分岐された各信号光の一方が通過する光導波路の温度を変化させることで、分岐された各信号光の一方の光位相を変化させる。
【0124】
温度センサ912は、遅延干渉計910の温度(たとえばケース温度)を検出する。温度センサ912は、検出した温度を示す温度検出値を第2演算器571へ出力する。温度センサ912は、図1に示した第2検出部124に対応する構成である。遅延干渉計910の温度は、図1で説明した第2特性112に対応する特性である。
【0125】
光電変換器920は、遅延干渉計910から出力された信号光を光電変換し、電気信号に変換した信号を識別器930へ出力する。識別器930は、光電変換器920から出力された信号が示すデータを識別する。識別器930は、識別したデータを出力する。
【0126】
Q値モニタ940は、光電変換器920から出力された信号と、識別器930から出力されたデータと、に基づいて、光受信装置900が受信した信号光のQ値(受信品質)を検出する。Q値モニタ940は、図1に示した第1検出部121に対応する構成である。Q値は、図1に示した第1特性111に対応する補償対象の特性であり、光受信装置900による信号光の受信品質を示す。
【0127】
Q値モニタ940は、検出したQ値を第1演算器561へ出力する。Q値モニタ940によって検出されるQ値は、光位相調整素子911において分岐された各信号光の位相差によって変化する。具体的には、Q値モニタ940によって検出されるQ値は、光位相調整素子911において分岐された各信号光の位相差が所定の位相差(たとえば1シンボル分の位相差)に近づくほど高くなる。
【0128】
<第1演算器および第1操作器について>
第1演算器561は、Q値モニタ940から出力されたQ値に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードバック制御を行う。具体的には、第1演算器561は、Q値が所定の範囲になるように光位相調整素子911の光位相を制御する。また、第1演算器561は、光位相調整素子911の光位相の制御を、第1操作器562が光位相調整素子911へ出力する位相操作値を制御することによって行う。
【0129】
たとえば、第1演算器561は、光位相調整素子911の光位相を適当な方向に変化させ、Q値が向上したか否かを判断する。第1演算器561は、Q値が向上した場合は光位相を同一の方向にさらに変化させ、Q値が劣化した場合は光位相を逆の方向に変化させる制御を繰り返す。第1演算器561によるフィードバック制御は、たとえば、遅延干渉計910において分岐された各信号光の位相差の100[MHz]程度のズレおよび100[MHz]程度以下のズレを補償可能な確度によって行われる。
【0130】
第1操作器562は、第1演算器561からの制御にしたがって、位相操作値を光位相調整素子911へ出力することで光位相調整素子911の光位相を操作する。たとえば、第1演算器561は第1操作器562へデジタル信号の位相操作値を出力する。第1操作器562は、第1演算器561から出力された位相操作値をアナログ信号に変換して光位相調整素子911へ出力する。また、第1操作器562は、更新制御回路501からの制御にしたがって、光位相調整素子911へ出力する位相操作値を固定可能である。位相操作値は、図1で説明したパラメータ113に対応するパラメータである。
【0131】
<第2演算器および第2操作器について>
第2演算器571は、温度センサ912から出力される温度検出値に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードフォワード制御を行う。具体的には、第2演算器571は、Q値が所定の範囲になるように光位相調整素子911の光位相を制御する。また、第1演算器561は、光位相調整素子911の光位相の制御を、第1操作器562が光位相調整素子911へ出力する位相操作値を制御することによって行う。また、第2演算器571は、イントロダイン検波方式の場合は、温度検出値に基づく局発光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。
【0132】
第1制御においては、第2演算器571は、温度検出値が所定の範囲に収まっていない場合に、位相操作値を変化させるように第2操作器572を制御する。第1制御においては、第2演算器571によるフィードフォワード制御は、イントロダイン検波方式の場合は、たとえば、信号光と局発光との間のMHzオーダの周波数のズレを補償可能な確度より低い確度によって行われる。
【0133】
なお、遅延干渉計910を用いた直接検波方式の場合は、第2演算器571は、温度検出値に基づく信号光の周波数の制御を、確度の異なる第1制御と第2制御とを切り替えて実行可能である。また、第1制御においては、第2演算器571によるフィードフォワード制御は、たとえば、信号光のMHzオーダの周波数のズレを補償可能な確度より低い確度によって行われる。
【0134】
第2制御においては、第2演算器571は、温度検出値の変化量に基づく位相操作値を導出し、導出した位相操作値を出力するように第2操作器572を制御する。具体的には、第2演算器571には、温度検出値の変化量と位相操作値の変化量との関係を示す関係情報が記憶されている。第2演算器571は、温度センサ912から出力された温度検出値の変化量を補償する位相操作値の変化量を関係情報に基づいて導出し、導出した操作値の変化量に基づいて第2操作器572を制御する。
【0135】
第2操作器572は、第2演算器571からの制御にしたがって位相操作値を光位相調整素子911へ出力することで、光位相調整素子911の光位相を操作する。たとえば、第2演算器571は第2操作器572へデジタル信号の位相操作値を出力する。第2操作器572は、第2演算器571から出力された位相操作値をアナログ信号に変換して光位相調整素子911へ出力する。
【0136】
図10は、光位相調整素子の温度に対する光位相の特性の一例を示す図である。図10において、横軸は、光位相調整素子911の温度[degC]を示している。縦軸は、光位相調整素子911によって調整された信号光の光位相[deg]を示している。特性1001は、光位相調整素子911の温度に対する光位相の特性を示している。
【0137】
たとえば光位相調整素子911の光導波路がガラスである場合は、特性1001のように、光位相調整素子911は、温度に対して光位相(遅延量)がほぼ線形に変化する。したがって、光位相調整素子911の温度変化量1002に対する光位相のズレ量1003の比率(特性1001の傾き)はほぼ一定になる。
【0138】
(第2演算器による第2制御の具体例)
第1演算器561の停止中における第2演算器571による第2制御において、LD551の温度基準値は、第1演算器561のフィードバック制御を停止させた時の温度検出値とする。第2演算器571は、周期的に、第1演算器561のフィードバック制御を停止させた時の光位相調整素子911の温度(温度基準値)に対する現在の光位相調整素子911の温度の変化量を算出する。
【0139】
ここで、図10に示した光位相調整素子911の温度変化量1002に対する光位相のズレ量1003の比率(特性1001の傾き)を1/0.2=5[deg/degC]とする。たとえば、第2演算器571は、第1演算器561のフィードバック制御を停止させた時の光位相調整素子911の光位相を基準値とする光位相調整素子911の現在の光位相の変化量(ズレ量)を、たとえば下記(3)式によって算出することができる。
【0140】
((現在の温度検出値)−(温度基準値))×5 …(3)
【0141】
第2演算器571は、算出した光位相の変化量を補償するための位相操作値を算出し、算出した操作値となるように第2操作器572を制御する。たとえば、第2演算器571には、光位相調整素子911へ入力する位相操作値と光位相調整素子911の光位相との関係(たとえば比率)を示す関係情報が記憶されている。
【0142】
第2演算器571は、記憶された関係情報に基づいて、光位相調整素子911の光位相の変化を補償するための位相操作値の変化量を算出することができる。これにより、光位相調整素子911の光位相を、高い確度により、第1演算器561のフィードバック制御を停止させた時の光位相に維持することができる。
【0143】
なお、たとえば、遅延干渉計910の温度変化の最大値を2/60[degC/sec]とし、光位相調整素子911の光位相のズレの許容量を1[deg]とすると、位相操作値の更新は少なくとも6[sec]間隔で行うことが望ましい。
【0144】
また、第2演算器571は、算出した変化量によって位相操作値を変化させる場合に、光位相調整素子911の温度の変化に対する温度検出値の応答速度に応じた時定数によって位相操作値を変化させるとよい。光位相調整素子911の温度の変化に対する温度検出値の応答速度は、たとえば熱の伝達特性によって決まる。
【0145】
熱の伝達特性は、熱抵抗や熱容量によって決まり、たとえば電気回路モデルのRCフィルタなどによって近似することができる。したがって、第2演算器571は、熱の伝達特性に応じた時定数によって位相操作値を変化させるとよい。これにより、熱の伝達特性に起因する位相操作値の制御のばたつきを抑えることができる。
【0146】
(更新制御回路による更新制御)
図9に示した更新制御回路501による更新制御については、たとえば図7に示した更新制御と同様である。
【0147】
(光受信装置の変形例)
図11は、図9に示した光受信装置の変形例を示す図である。図11において、図9に示した部分と同様の部分については同一の符号を付して説明を省略する。図11に示すように、光受信装置900は、図9に示したQ値モニタ940に代えて誤り訂正器1110を備えていてもよい。識別器930は、データを誤り訂正器1110へ出力する。
【0148】
誤り訂正器1110は、識別器930から出力されたデータの誤り訂正を行う。誤り訂正器1110は、誤り訂正を行ったデータを出力する。また、誤り訂正器1110は、識別器930から出力されたデータの誤り数を第1演算器561へ出力する。データの誤り数は、図1に示した第1特性111に対応する補償対象の特性であり、光受信装置900による信号光の受信品質を示す。
【0149】
第1演算器561は、図9に示したQ値に代えて、誤り訂正器1110から出力された誤り数に基づいて、遅延干渉計910において分岐された各信号光の位相差を制御し、Q値を向上させるフィードバック制御を行う。また、図11に示すように、温度センサ912は、遅延干渉計910の外部に設けられ、遅延干渉計910の雰囲気温度を検出してもよい。この場合も、光位相調整素子911の温度を間接的に検出することができる。
【0150】
このように、実施の形態3にかかる光受信装置900によれば、フィードバック制御を行う第1演算器561の機能の更新中に第2演算器571により行うフィードフォワード制御において、検出値と操作値との関係情報を用いる。これにより、フィードフォワード制御の確度を向上させ、第1演算器561の更新中においても光位相調整素子911における位相差の制御を安定させることができる。このため、通信品質を向上させることができる。
【0151】
以上説明したように、制御装置、光受信装置および制御方法においては、フィードバック制御を行う第1演算器122の機能の更新中に行う第2演算器126によるフィードフォワード制御において、検出値と操作量との関係情報を用いて操作量を導出する。これにより、確度の高い(系統誤差が小さい)制御を行い、第1演算器122の更新中の制御を安定させることができる。上述した各実施の形態に関し、さらに以下の付記を開示する。
【0152】
(付記1)処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作する第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させる更新制御部と、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記パラメータの操作が停止している場合に、前記取得部によって取得された関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する第2演算器と、
を備えることを特徴とする制御装置。
【0153】
(付記2)前記第2演算器は、前記関係情報に基づいて、前記第2特性の検出結果の変化量を補償する前記パラメータの操作量を導出し、導出した操作量によって前記パラメータを操作することを特徴とする付記1に記載の制御装置。
【0154】
(付記3)前記第2演算器は、前記第1演算器による前記パラメータの操作が停止される時の前記第2特性の検出結果を基準値として、前記第2特性の検出結果の前記基準値からの変動を補償する前記操作量を導出することを特徴とする付記2に記載の制御装置。
【0155】
(付記4)前記パラメータは第1パラメータおよび第2パラメータを含み、
前記更新制御部は、前記第1演算器による前記パラメータの操作が停止される時の前記第1パラメータと前記第1パラメータの可変範囲とに基づいて前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記1〜3のいずれか一つに記載の制御装置。
【0156】
(付記5)前記更新制御部は、前記第1パラメータの増加方向と減少方向の各可変範囲が閾値以上になるように前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記4に記載の制御装置。
【0157】
(付記6)前記第2特性は、第3特性および第4特性を含み、
前記パラメータは、前記第3特性を変化させる第1パラメータと、前記第4特性を変化させる第2パラメータと、を含み、
前記更新制御部は、前記第1演算器による前記パラメータの操作が停止される時の前記第3特性の検出結果と前記第3特性の可変範囲とに基づいて前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記1〜3のいずれか一つに記載の制御装置。
【0158】
(付記7)前記更新制御部は、前記第3特性の増加方向と減少方向の各可変範囲が閾値以上になるように前記第1パラメータおよび前記第2パラメータを調整することを特徴とする付記6に記載の制御装置。
【0159】
(付記8)前記更新制御部は、
前記第1演算器の機能を更新しない期間に、前記関係情報を用いずに前記パラメータを操作する第1制御を前記第2演算器に実行させ、
前記第1演算器の機能を更新する期間に、前記関係情報と前記第2特性の検出結果の変化量とに基づく操作量によって前記パラメータを操作する第2制御を前記第2演算器に実行させることを特徴とする付記1〜7のいずれか一つに記載の制御装置。
【0160】
(付記9)信号光と局発光とを干渉させ、干渉結果をデジタル処理する光受信装置において、
前記信号光と前記局発光との位相差の検出結果に基づいて、前記局発光を発振する半導体レーザの温度および前記半導体レーザの駆動電流の少なくともいずれかの操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記温度および前記半導体レーザの駆動電流の大きさの少なくともいずれかの変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度および前記駆動電流の大きさの少なくともいずれかの検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【0161】
(付記10)前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする付記9に記載の光受信装置。
【0162】
(付記11)信号光を分岐し、分岐した各信号光の位相差を調整して干渉させる遅延干渉計を有し、前記遅延干渉計による干渉結果に基づいて前記信号光が示すデータを識別する光受信装置において、
前記干渉結果に基づく前記信号光の受信品質の検出結果に基づいて、前記位相差の操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記遅延干渉計の温度の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度の検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【0163】
(付記12)前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする付記11に記載の光受信装置。
【0164】
(付記13)第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、
前記第1演算器による前記パラメータの操作が停止している場合に、取得した前記関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する、
ことを特徴とする制御方法。
【符号の説明】
【0165】
301〜303 補償値変化
304 許容範囲
550 ローカルオシレータ
552 LD温度調整部
553 LD電流調整部
940 Q値モニタ
1002 温度変化量
1003 ズレ量
【特許請求の範囲】
【請求項1】
処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作する第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させる更新制御部と、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記パラメータの操作が停止している場合に、前記取得部によって取得された関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する第2演算器と、
を備えることを特徴とする制御装置。
【請求項2】
前記第2演算器は、前記関係情報に基づいて、前記第2特性の検出結果の変化量を補償する前記パラメータの操作量を導出し、導出した操作量によって前記パラメータを操作することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記更新制御部は、
前記第1演算器の機能を更新しない期間に、前記関係情報を用いずに前記パラメータを操作する第1制御を前記第2演算器に実行させ、
前記第1演算器の機能を更新する期間に、前記関係情報と前記第2特性の検出結果の変化量とに基づく操作量によって前記パラメータを操作する第2制御を前記第2演算器に実行させることを特徴とする請求項1または2に記載の制御装置。
【請求項4】
信号光と局発光とを干渉させ、干渉結果をデジタル処理する光受信装置において、
前記信号光と前記局発光との位相差の検出結果に基づいて、前記局発光を発振する半導体レーザの温度および前記半導体レーザの駆動電流の少なくともいずれかの操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記温度および前記半導体レーザの駆動電流の大きさの少なくともいずれかの変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度および前記駆動電流の大きさの少なくともいずれかの検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【請求項5】
信号光を分岐し、分岐した各信号光の位相差を調整して干渉させる遅延干渉計を有し、前記遅延干渉計による干渉結果に基づいて前記信号光が示すデータを識別する光受信装置において、
前記干渉結果に基づく前記信号光の受信品質の検出結果に基づいて、前記位相差の操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記遅延干渉計の温度の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度の検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【請求項6】
前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする請求項5に記載の光受信装置。
【請求項7】
第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、
前記第1演算器による前記パラメータの操作が停止している場合に、取得した前記関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する、
ことを特徴とする制御方法。
【請求項1】
処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作する第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させる更新制御部と、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記パラメータの操作が停止している場合に、前記取得部によって取得された関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する第2演算器と、
を備えることを特徴とする制御装置。
【請求項2】
前記第2演算器は、前記関係情報に基づいて、前記第2特性の検出結果の変化量を補償する前記パラメータの操作量を導出し、導出した操作量によって前記パラメータを操作することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記更新制御部は、
前記第1演算器の機能を更新しない期間に、前記関係情報を用いずに前記パラメータを操作する第1制御を前記第2演算器に実行させ、
前記第1演算器の機能を更新する期間に、前記関係情報と前記第2特性の検出結果の変化量とに基づく操作量によって前記パラメータを操作する第2制御を前記第2演算器に実行させることを特徴とする請求項1または2に記載の制御装置。
【請求項4】
信号光と局発光とを干渉させ、干渉結果をデジタル処理する光受信装置において、
前記信号光と前記局発光との位相差の検出結果に基づいて、前記局発光を発振する半導体レーザの温度および前記半導体レーザの駆動電流の少なくともいずれかの操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記温度および前記半導体レーザの駆動電流の大きさの少なくともいずれかの変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度および前記駆動電流の大きさの少なくともいずれかの検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【請求項5】
信号光を分岐し、分岐した各信号光の位相差を調整して干渉させる遅延干渉計を有し、前記遅延干渉計による干渉結果に基づいて前記信号光が示すデータを識別する光受信装置において、
前記干渉結果に基づく前記信号光の受信品質の検出結果に基づいて、前記位相差の操作を指示する操作値を変化させる第1演算器と、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記操作値の操作を停止させる更新制御部と、
前記操作値の操作量と、前記遅延干渉計の温度の変化量との関係を示す関係情報を取得する取得部と、
前記更新制御部によって前記第1演算器による前記操作値の操作が停止している場合に、前記取得部によって取得された関係情報と、前記温度の検出結果の変化量と、に基づく操作量によって前記操作値を変化させる第2演算器と、
を備えることを特徴とする光受信装置。
【請求項6】
前記第2演算器は、所定の時定数によって前記操作値を変化させることを特徴とする請求項5に記載の光受信装置。
【請求項7】
第1演算器によって、処理装置の第1特性の検出結果に基づいて、前記処理装置における前記第1特性を変化させるパラメータを操作し、
前記第1演算器の機能を更新する場合に、前記第1演算器による前記パラメータの操作を停止させ、
前記パラメータの操作量と、前記第1特性を変化させる前記処理装置の第2特性の変化量との関係を示す関係情報を取得し、
前記第1演算器による前記パラメータの操作が停止している場合に、取得した前記関係情報と、前記第2特性の検出結果の変化量と、に基づく操作量によって前記パラメータを操作する、
ことを特徴とする制御方法。
【図1】


【図2】
【図3−1】
【図3−2】
【図3−3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3−1】
【図3−2】
【図3−3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−12847(P2013−12847A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143272(P2011−143272)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]