
制御装置、制御方法及びプログラム
【課題】制御系の動作を確保しつつ、アイドルストップ機能を動作させる。
【解決手段】バッテリー80の出力電圧が低下し、制御ユニット11が、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することが困難になった場合には、予め記憶されていた情報に基づいて、制御信号を生成し出力する。これにより、制御ユニット11は、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができる。また、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができるので、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【解決手段】バッテリー80の出力電圧が低下し、制御ユニット11が、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することが困難になった場合には、予め記憶されていた情報に基づいて、制御信号を生成し出力する。これにより、制御ユニット11は、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができる。また、バッテリー80の出力電圧が低下したとしても、制御系100の動作を継続して行うことができるので、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御装置、制御方法及びプログラムに関し、更に詳しくは、バッテリーから供給されるパワーによって動作する制御装置、制御対象機器を制御するための制御方法及びプログラムに関する。
【背景技術】
【0002】
近年の地球温暖化や、世界規模で進行する経済産業の発展にともない、CO2排出量の削減、或いはエネルギー消費量の削減を目的とする取り組みが重要視されている。このような背景から、停止しているときにはエンジンを停止する機能(アイドルストップ機能)をもった車両が実用化されている。
【0003】
一般に、エンジンの始動時の突入電流は、定格電流よりもかなり大きなものとなる。このため、アイドルストップ機能によって、エンジンの始動と停止が頻繁に繰り返されると、バッテリーの電圧が、一時的に制御系の最低動作電圧以下に低下してしまうことがある。この場合、車両の制御装置は、動作を継続することができなくなる。
【0004】
そこで、この種の電圧の低下を抑制するための技術が種々提案されている(例えば特許文献1参照)。特許文献1に記載されたアイドルストップ装置は、バッテリーの残量が多い場合には、通常通り、車両の停止時にエンジンを停止する。一方、エンジンの始動と停止が頻繁に繰り返されることによって、バッテリーの電圧が低下すると、車両の停止中もエンジンの運転を継続し、バッテリーへの充電を優先的に行う。そして、同時にバッテリーへの充電が必要であることを示す情報を記憶する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2009−220747号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたアイドルストップ装置は、バッテリーへの充電が必要であることを示す情報を記憶する。このため、エンジンが停止して、アイドルストップ装置がリセットされたとしても、当該アイドルストップ装置は、リセット後に、予め記憶された情報を読み込むことで、バッテリーへの充電が必要であることを認識することができる。したがって、バッテリーに蓄積されたパワーの残量が少なくなった場合には、アイドルストップ機能によって、エンジンが停止するのを防ぐことが可能となる。これにより、バッテリーの電圧の低下を抑制することができる。
【0007】
しかしながら、特許文献1に記載のアイドルストップ装置は、例えば経年劣化によって、バッテリーの電圧が低下してくると、アイドルストップ機能が動作しなくなり、車両の燃費を向上させることができなくなると考えられる。
【0008】
本発明は、上述の事情の下になされたもので、制御系の動作を確保しつつ、アイドルストップ機能を動作させることを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の第1の観点に係る制御装置は、
バッテリーから供給されるパワーによって動作する制御装置であって、
外部から入力される電気信号の値を保持する保持手段と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する生成手段と、
を備える。
【0010】
本発明の第2の観点にかかる制御方法は、
バッテリーから供給されるパワーによって動作する制御装置を用いて、制御対象機器を制御する制御方法であって、
外部から入力される電気信号の値を保持する工程と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する工程と、
を含む。
【0011】
本発明の第3の観点に係るプログラムは、
バッテリーから供給されるパワーによって動作するコンピュータに、
外部から入力される電気信号の値を保持する手順と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する手順と、
を実行させる。
【発明の効果】
【0012】
本発明によれば、外部から入力される電気信号の値が保持される。そして、バッテリーの電圧が低下した場合には、保持された電気信号の値に基づいて、制御対象機器を制御するための制御信号が生成される。このため、電圧が低下することによって、入力される電気信号の値が変化したり、値の読み込みに不具合が発生したとしても、制御系は正確な動作を継続する。また、制御系は、電圧が低下しても正確に動作する。このため、アイドルストップ機能によるエンジンの停止及び始動を必要に応じて行うことができる。したがって、車両の燃費を向上させることが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施形態に係る制御系のブロック図である。
【図2】制御装置のブロック図である。
【図3】制御ユニットの動作電圧、通信ユニットの動作電圧、及び接点の判定可能電圧を模式的に示す図である。
【図4】バッテリーの出力電圧の推移を表す曲線を示す図(その1)である。
【図5】バッテリーの出力電圧の推移を表す曲線を示す図(その2)である。
【図6】バッテリーの出力電圧の推移を表す曲線を示す図(その3)である。
【図7】エンジンの回転数の推移を説明するための図である。
【発明を実施するための形態】
【0014】
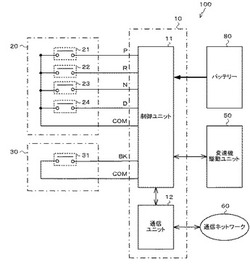
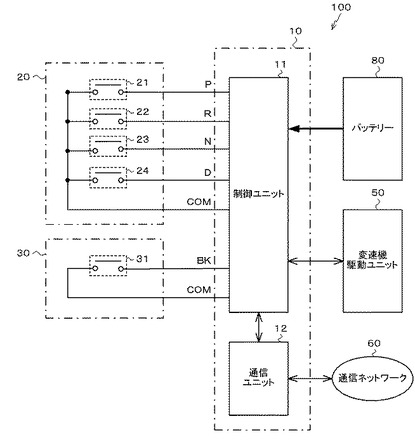
以下、本発明の一実施形態を、図面を参照しつつ説明する。図1は本実施形態に係る制御系100を示すブロック図である。この制御系100は、制御対象機器としての変速機を制御するための制御系であり、例えばアイドルストップ機能を有する車両に搭載される。
【0015】
図1に示されるように、制御系100は、シフト位置検出ユニット20、ブレーキ状態検出ユニット30、変速機駆動ユニット50、車両を構成する各機器によって構成される通信ネットワーク60、及び変速機駆動ユニット50を制御する制御装置10を有している。これらの制御系を構成する各部は、バッテリー80から供給されるパワーによって動作する。
【0016】
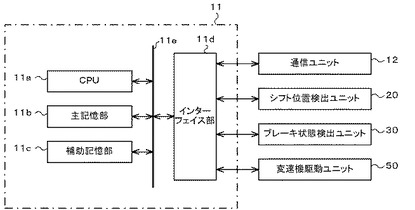
制御装置10は、制御ユニット11と通信ユニット12を備えている。図2は、制御ユニット11のブロック図である。図2に示されるように、制御ユニット11は、CPU(Central Processing Unit)11a、主記憶部11b、補助記憶部11c、及びインターフェイス部11dを有するマイクロコンピュータである。
【0017】
CPU11aは、補助記憶部11cに記憶されているプログラムに従って、変速機駆動ユニット50を制御するための制御信号を生成し、変速機駆動ユニット50へ出力する。この制御信号は、変速機駆動ユニット50を構成するコイルを駆動するための信号である。
【0018】
主記憶部11bは、RAM(Random Access Memory)を有している。主記憶部11bは、CPU11aの作業領域として用いられる。
【0019】
補助記憶部11cは、ROM(Read Only Memory)、磁気ディスク、半導体メモリ等の不揮発性メモリを有している。補助記憶部11cは、CPU11aが実行するプログラム、及び各種パラメータなどを記憶している。また、CPU11aの処理結果を記憶する。
【0020】
インターフェイス部11dは、シリアルインターフェイスまたはLAN(Local Area Network)インターフェイス、及びアナログインターフェイスを有している。上述した通信ユニット12、シフト位置検出ユニット20、ブレーキ状態検出ユニット30、及び変速機駆動ユニット50は、このインターフェイス部11dを介して、システムバス11eに接続される。
【0021】
図1に戻り、通信ユニット12は、通信ネットワーク60と通信を行うための装置である。制御ユニット11は、通信ユニット12を介して通信ネットワーク60に接続される。
【0022】
通信ネットワーク60は、例えばCAN(Controller Area Network)、LIN(Local Interconnect Network)等の車載ネットワークである。この通信ネットワーク60と通信を行うことによって、例えば車両の速度や、エンジンの回転数等の情報を取得することができる。
【0023】
シフト位置検出ユニット20は、車両のドライブポジションを変更するためのシフトレバーの位置を検出するユニットである。このシフト位置検出ユニット20は、例えば4つの接点21〜24を有している。各接点21〜24は、ノーマルオープンの接点であり、ラインP,R,N,Dと、ラインCOMとによって、制御ユニット11に接続されている。そして、各接点21〜24がオンになると、ラインP,R,N,Dと、ラインCOMが短絡する。また、各接点21〜24がオフになると、ラインP,R,N,Dと、ラインCOMが開放される。
【0024】
シフト位置検出ユニット20では、シフトレバーの位置に対応した接点21〜24がオンとなる。制御ユニット11は、ラインCOMと短絡されるラインP,R,N,Dから、シフトレバーの位置を特定することができる。
【0025】
ブレーキ状態検出ユニット30は、ブレーキペダルの位置を検出するユニットである。このブレーキ状態検出ユニット30は、接点31を有している。接点31は、ノーマルオープンの接点であり、ラインBKと、ラインCOMによって、制御ユニット11に接続されている。そして、接点31がオンになると、ラインBKと、ラインCOMが短絡する。また、接点31がオフになると、ラインBKと、ラインCMが開放される。
【0026】
ブレーキ位置検出ユニットでは、ドライバによってブレーキペダルがある程度踏み込まれると、接点31がオンとなる。制御ユニット11は、ラインBKとラインCONとが短絡されると、ブレーキペダルが踏み込まれたと判定する。
【0027】
変速機駆動ユニット50は、制御ユニット11から出力される制御信号に基づいて、変速機を駆動する。
【0028】
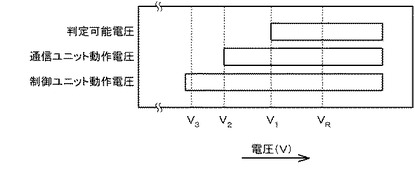
図3は、制御ユニット11の動作電圧の範囲、通信ユニット12の動作電圧の範囲、接点21〜24、31の判定可能電圧の範囲を模式的に示す図である。
【0029】
図3に示されるように、制御ユニット11の動作電圧の範囲は、制御系100の定格電圧VRから、この定格電圧VRよりも低い電圧V3に渡っている。通信ユニット動作電圧の範囲は、制御系100の定格電圧VRより高い電圧から、電圧V2までである。この通信ユニット12の最低動作電圧V2は、制御ユニット11の最低動作電圧よりも高い。
【0030】
判定可能電圧とは、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定するのに必要な電圧である。バッテリー80の出力電圧が、判定可能電圧よりも低下すると、制御ユニット11は、接点21〜24,31の状態を正確に判定することができなくなる。このため従来は、バッテリー80の出力電圧が定格電圧VRから電圧V1近傍まで低下した場合には、制御ユニット11の動作をリセットさせていた。
【0031】
上述の判定可能電圧の範囲は、制御系100の定格電圧より高い電圧から、電圧V1までである。この判定可能電圧の最低動作電圧V1は、制御ユニット11の最低動作電圧及び通信ユニット12の最低動作電圧V2よりも高い。
【0032】
次に、上述のように構成された制御装置10の動作について説明する。制御装置10を構成する制御ユニット11は、シフト位置検出ユニット20の接点21〜24の動作状態から、シフトレバーの位置を検出する。また、ブレーキ状態検出ユニット30の接点31の動作状態から、ドライバによるブレーキ操作の有無を判定する。
【0033】
そして、制御ユニット11は、通信ネットワーク60から、通信ユニット12を介して現在の車両の速度、加速度等を取得し、これらの情報を加味して、ブレーキの状況とシフトレバーの位置とに基づいて、変速機を動作させるための制御信号を生成し出力する。
【0034】
また、制御ユニット11は、制御信号の生成と同時に、当該制御信号を生成する基礎となる基礎データを主記憶部11b或いは補助記憶部11cに記憶する。この基礎データは、シフト位置検出ユニット20の各接点21〜24の動作状態、ブレーキ状態検出ユニット30の接点31の動作状態、通信ユニット12を介して、通信ネットワーク60から取得した情報を含む。そして、シフト位置検出ユニット20の各接点21〜24の動作状態等は、例えば[0001]等のコードとして保存される。このコードは例えば、0が接点が開である状態を示し、1が接点が閉である状態を示す。
【0035】
制御ユニット11は、上述の動作と並行して、バッテリー80の電圧を監視する。そして、例えばアイドルストップ機能により停止したエンジンを始動する際に、バッテリー80の電圧が低下した場合には、制御ユニット11は、状況に応じた動作を行う。
【0036】
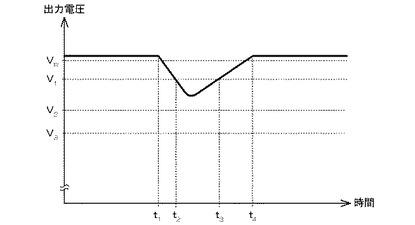
例えば、図4には、バッテリー80の出力電圧の推移を表す曲線が示されている。この曲線は、時刻t1に、エンジンの始動が行われたときの出力電圧の推移を示している。図4を参照するとわかるように、アイドルストップ機能によって停止しているエンジンが時刻t1に始動すると、時刻t2にバッテリー80の出力電圧が一旦電圧V1以下となる。なお、ここでは、出力電圧は、電圧V2以上である。そして、出力電圧は、時刻t2から時刻t3まで、電圧V1を下回った後、時刻t4に電圧が低下する前の電圧に復帰する。
【0037】
上述したように、出力電圧が電圧V1以下となると、制御ユニット11は、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することができなくなる。
【0038】
そこで、制御ユニット11は、図4に示されるように、バッテリー80の出力電圧が、電圧V1以下に低下した場合には、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを示す基礎データを、主記憶部11b或いは補助記憶部11cから読み出す。そして、読み出した基礎データと、通信ユニット12を介して通信ネットワーク60から取得した情報に基づいて、制御信号を生成し、変速機駆動ユニット50へ出力する。
【0039】
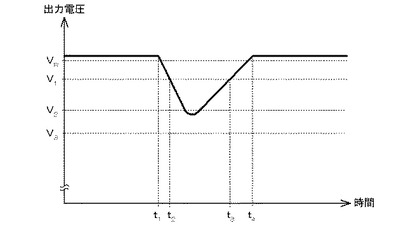
また、図5に示される曲線は、バッテリー80の出力電圧が、電圧V2以下まで低下したときの当該出力電圧の推移を示している。出力電圧が電圧V2以下のときには、制御ユニット11は、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することができなくなる。また、通信ユニット12も正常に動作しなくなる。
【0040】
そこで、制御ユニット11は、図5に示されるように、バッテリー80の出力電圧が、電圧V2以下に低下した場合には、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを示す情報と、通信ユニット12を介して取得した情報とを含む基礎データを、主記憶部11b或いは補助記憶部11cから読み出す。そして、読み出した基礎データに基づいて、制御信号を生成し、変速機駆動ユニット50へ出力する。
【0041】
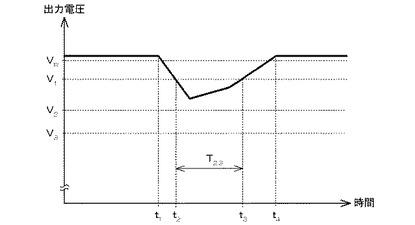
また、図6に示される曲線は、バッテリー80の出力電圧が、電圧V1以下まで低下した状態が、予め設定された時間(時間T23)だけ継続したときの当該出力電圧の推移を示している。図6を参照するとわかるように、バッテリー80の出力電圧が、一定時間以上、電圧V1を下回った場合には、制御ユニット11は、主記憶部11b及び補助記憶部11cに記憶された基礎データを消去する。同時に、通信ユニット12等をリセットする。これにより、制御系100が起動時の状態にリセットされる。
【0042】
以上説明したように、本実施形態では、バッテリー80の出力電圧が、電圧V1以下になることによって、制御ユニット11が、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、或いはオフであるかを判定することが困難になった場合には、予め記憶されていた情報に基づいて、制御信号が生成され出力される。
【0043】
したがって、制御ユニット11は、バッテリー80の出力電圧が、電圧V1(判定可能電圧)以下に低下したとしても、制御系100の動作を継続して正確に行うことができる。また、バッテリー80の出力電圧が判定可能電圧以下に低下したとしても、制御系100の動作が継続して正確に行われる。このため、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【0044】
バッテリー80の出力電圧が、通信ユニット12の最低動作電圧V2より大きい場合には、通信ユニット12を介して、通信ネットワーク60から取得した情報は、信頼性が高いと考えられる。本実施形態では、バッテリー80の出力電圧が最低動作電圧V2よりも大きい場合には、通信ネットワーク60から取得した情報に基づいて、制御信号が生成され出力される。これにより、精度よく制御信号を生成することができる。
【0045】
本実施形態では、バッテリー80の出力電圧が、電圧V2以下になると、制御ユニット11は、接点21〜24,31がオンであるか、或いはオフであるかを判定することが困難になる。また、バッテリー80の出力電圧が、電圧V2以下になると、通信ユニット12が、正常に動作しなくなる。この場合には、予め記憶されていた情報に基づいて、制御信号が生成され出力される。
【0046】
したがって、制御ユニット11は、バッテリー80の出力電圧が電圧V2以下に低下したとしても、制御系100の動作を継続して正確に行うことができる。また、バッテリー80の出力電圧が電圧V2以下に低下したとしても、制御系100の動作が継続して正確に行われる。このため、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【0047】
本実施形態では、バッテリー80の出力電圧が、一定時間以上、電圧V1を下回った場合には、記憶された基礎データが消去される。そして、通信ユニット12等がリセットされる。これにより、制御系100が起動時の状態にリセットされる。したがって、記憶された基礎データの内容と、実際のシフトレバーの位置等に代表される車両情報の内容とが乖離していたとしても、バッテリー80の出力電圧が復帰した後に、誤動作が誘発されることがなく、精度よく制御対象物を駆動することができる。
【0048】
以上、本発明の実施形態について説明したが、本発明は上記実施形態によって限定されるものではない。例えば本実施形態では、制御ユニット11にシフト位置検出ユニット20及びブレーキ状態検出ユニット30が接続されている場合について説明した。これに限らず、接点を有する他のユニットが、制御ユニット11に接続されていてもよい。他のユニットとしては、例えば車両のステアリングの位置を検出するユニット等が考えられる。
【0049】
制御ユニット11は、通信ユニット12を介して、情報を送信する場合には、当該情報を受信する制御対象機器の誤動作を回避するための内容を付加した後、情報の送信を実行することとしてもよい。
【0050】
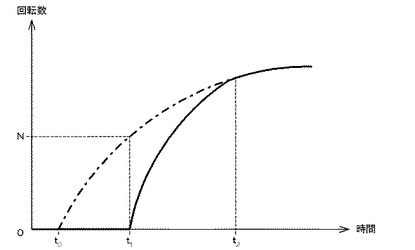
制御ユニット11は、制御系100がリセットされた後は、不図示のセンサや、通信ユニット12を介して取得した情報に基づいて生成する出力を補正することとしてもよい。例えば、図7を参照するとわかるように、時刻t0でエンジンが始動した場合は、図中の仮想線で示されるように、エンジンの回転数が推移する。このため、時刻t0から一定時間経過した時刻t1で制御系100が復帰すると、制御系100は、回転数の初期値をNと認識し、この初期値に基づいて制御対象機器の制御を開始する。
【0051】
しかしながら、エンジンの回転数の初期値は零であるため、初期値をNとした制御を行うと、制御対象機器の動作が急峻になってしまうことがある。このため、制御ユニット11は、制御系100が復帰した時刻t1から時刻t2までの間は、図7に実線で示されるように回転数を補正し、補正後の回転数に関する情報を出力することとしてもよい。
【0052】
例えば、上記実施形態では、CPU11aが補助記憶部に記憶されたプログラムを実行することとした。これに限らず、制御ユニット11を、ハードウェアによって構成してもよい。
【0053】
また、制御装置10の補助記憶部11cに記憶されているプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータで読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールすることにより、上述の処理を実行する装置を構成することとしてもよい。
【0054】
なお、本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。
【産業上の利用可能性】
【0055】
本発明の制御装置、制御方法及びプログラムは、バッテリーから供給されるパワーによって動作する制御対象物の制御に適している。
【符号の説明】
【0056】
10 制御装置
11 制御ユニット
11a CPU
11b 主記憶部
11c 補助記憶部
11d インターフェイス部
11e システムバス
12 通信ユニット
20 シフト位置検出ユニット
21〜24 接点
30 ブレーキ状態検出ユニット
31 接点
50 変速機駆動ユニット
60 通信ネットワーク
80 バッテリー
100 制御系
【技術分野】
【0001】
本発明は、制御装置、制御方法及びプログラムに関し、更に詳しくは、バッテリーから供給されるパワーによって動作する制御装置、制御対象機器を制御するための制御方法及びプログラムに関する。
【背景技術】
【0002】
近年の地球温暖化や、世界規模で進行する経済産業の発展にともない、CO2排出量の削減、或いはエネルギー消費量の削減を目的とする取り組みが重要視されている。このような背景から、停止しているときにはエンジンを停止する機能(アイドルストップ機能)をもった車両が実用化されている。
【0003】
一般に、エンジンの始動時の突入電流は、定格電流よりもかなり大きなものとなる。このため、アイドルストップ機能によって、エンジンの始動と停止が頻繁に繰り返されると、バッテリーの電圧が、一時的に制御系の最低動作電圧以下に低下してしまうことがある。この場合、車両の制御装置は、動作を継続することができなくなる。
【0004】
そこで、この種の電圧の低下を抑制するための技術が種々提案されている(例えば特許文献1参照)。特許文献1に記載されたアイドルストップ装置は、バッテリーの残量が多い場合には、通常通り、車両の停止時にエンジンを停止する。一方、エンジンの始動と停止が頻繁に繰り返されることによって、バッテリーの電圧が低下すると、車両の停止中もエンジンの運転を継続し、バッテリーへの充電を優先的に行う。そして、同時にバッテリーへの充電が必要であることを示す情報を記憶する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平2009−220747号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたアイドルストップ装置は、バッテリーへの充電が必要であることを示す情報を記憶する。このため、エンジンが停止して、アイドルストップ装置がリセットされたとしても、当該アイドルストップ装置は、リセット後に、予め記憶された情報を読み込むことで、バッテリーへの充電が必要であることを認識することができる。したがって、バッテリーに蓄積されたパワーの残量が少なくなった場合には、アイドルストップ機能によって、エンジンが停止するのを防ぐことが可能となる。これにより、バッテリーの電圧の低下を抑制することができる。
【0007】
しかしながら、特許文献1に記載のアイドルストップ装置は、例えば経年劣化によって、バッテリーの電圧が低下してくると、アイドルストップ機能が動作しなくなり、車両の燃費を向上させることができなくなると考えられる。
【0008】
本発明は、上述の事情の下になされたもので、制御系の動作を確保しつつ、アイドルストップ機能を動作させることを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の第1の観点に係る制御装置は、
バッテリーから供給されるパワーによって動作する制御装置であって、
外部から入力される電気信号の値を保持する保持手段と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する生成手段と、
を備える。
【0010】
本発明の第2の観点にかかる制御方法は、
バッテリーから供給されるパワーによって動作する制御装置を用いて、制御対象機器を制御する制御方法であって、
外部から入力される電気信号の値を保持する工程と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する工程と、
を含む。
【0011】
本発明の第3の観点に係るプログラムは、
バッテリーから供給されるパワーによって動作するコンピュータに、
外部から入力される電気信号の値を保持する手順と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する手順と、
を実行させる。
【発明の効果】
【0012】
本発明によれば、外部から入力される電気信号の値が保持される。そして、バッテリーの電圧が低下した場合には、保持された電気信号の値に基づいて、制御対象機器を制御するための制御信号が生成される。このため、電圧が低下することによって、入力される電気信号の値が変化したり、値の読み込みに不具合が発生したとしても、制御系は正確な動作を継続する。また、制御系は、電圧が低下しても正確に動作する。このため、アイドルストップ機能によるエンジンの停止及び始動を必要に応じて行うことができる。したがって、車両の燃費を向上させることが可能となる。
【図面の簡単な説明】
【0013】
【図1】本実施形態に係る制御系のブロック図である。
【図2】制御装置のブロック図である。
【図3】制御ユニットの動作電圧、通信ユニットの動作電圧、及び接点の判定可能電圧を模式的に示す図である。
【図4】バッテリーの出力電圧の推移を表す曲線を示す図(その1)である。
【図5】バッテリーの出力電圧の推移を表す曲線を示す図(その2)である。
【図6】バッテリーの出力電圧の推移を表す曲線を示す図(その3)である。
【図7】エンジンの回転数の推移を説明するための図である。
【発明を実施するための形態】
【0014】
以下、本発明の一実施形態を、図面を参照しつつ説明する。図1は本実施形態に係る制御系100を示すブロック図である。この制御系100は、制御対象機器としての変速機を制御するための制御系であり、例えばアイドルストップ機能を有する車両に搭載される。
【0015】
図1に示されるように、制御系100は、シフト位置検出ユニット20、ブレーキ状態検出ユニット30、変速機駆動ユニット50、車両を構成する各機器によって構成される通信ネットワーク60、及び変速機駆動ユニット50を制御する制御装置10を有している。これらの制御系を構成する各部は、バッテリー80から供給されるパワーによって動作する。
【0016】
制御装置10は、制御ユニット11と通信ユニット12を備えている。図2は、制御ユニット11のブロック図である。図2に示されるように、制御ユニット11は、CPU(Central Processing Unit)11a、主記憶部11b、補助記憶部11c、及びインターフェイス部11dを有するマイクロコンピュータである。
【0017】
CPU11aは、補助記憶部11cに記憶されているプログラムに従って、変速機駆動ユニット50を制御するための制御信号を生成し、変速機駆動ユニット50へ出力する。この制御信号は、変速機駆動ユニット50を構成するコイルを駆動するための信号である。
【0018】
主記憶部11bは、RAM(Random Access Memory)を有している。主記憶部11bは、CPU11aの作業領域として用いられる。
【0019】
補助記憶部11cは、ROM(Read Only Memory)、磁気ディスク、半導体メモリ等の不揮発性メモリを有している。補助記憶部11cは、CPU11aが実行するプログラム、及び各種パラメータなどを記憶している。また、CPU11aの処理結果を記憶する。
【0020】
インターフェイス部11dは、シリアルインターフェイスまたはLAN(Local Area Network)インターフェイス、及びアナログインターフェイスを有している。上述した通信ユニット12、シフト位置検出ユニット20、ブレーキ状態検出ユニット30、及び変速機駆動ユニット50は、このインターフェイス部11dを介して、システムバス11eに接続される。
【0021】
図1に戻り、通信ユニット12は、通信ネットワーク60と通信を行うための装置である。制御ユニット11は、通信ユニット12を介して通信ネットワーク60に接続される。
【0022】
通信ネットワーク60は、例えばCAN(Controller Area Network)、LIN(Local Interconnect Network)等の車載ネットワークである。この通信ネットワーク60と通信を行うことによって、例えば車両の速度や、エンジンの回転数等の情報を取得することができる。
【0023】
シフト位置検出ユニット20は、車両のドライブポジションを変更するためのシフトレバーの位置を検出するユニットである。このシフト位置検出ユニット20は、例えば4つの接点21〜24を有している。各接点21〜24は、ノーマルオープンの接点であり、ラインP,R,N,Dと、ラインCOMとによって、制御ユニット11に接続されている。そして、各接点21〜24がオンになると、ラインP,R,N,Dと、ラインCOMが短絡する。また、各接点21〜24がオフになると、ラインP,R,N,Dと、ラインCOMが開放される。
【0024】
シフト位置検出ユニット20では、シフトレバーの位置に対応した接点21〜24がオンとなる。制御ユニット11は、ラインCOMと短絡されるラインP,R,N,Dから、シフトレバーの位置を特定することができる。
【0025】
ブレーキ状態検出ユニット30は、ブレーキペダルの位置を検出するユニットである。このブレーキ状態検出ユニット30は、接点31を有している。接点31は、ノーマルオープンの接点であり、ラインBKと、ラインCOMによって、制御ユニット11に接続されている。そして、接点31がオンになると、ラインBKと、ラインCOMが短絡する。また、接点31がオフになると、ラインBKと、ラインCMが開放される。
【0026】
ブレーキ位置検出ユニットでは、ドライバによってブレーキペダルがある程度踏み込まれると、接点31がオンとなる。制御ユニット11は、ラインBKとラインCONとが短絡されると、ブレーキペダルが踏み込まれたと判定する。
【0027】
変速機駆動ユニット50は、制御ユニット11から出力される制御信号に基づいて、変速機を駆動する。
【0028】
図3は、制御ユニット11の動作電圧の範囲、通信ユニット12の動作電圧の範囲、接点21〜24、31の判定可能電圧の範囲を模式的に示す図である。
【0029】
図3に示されるように、制御ユニット11の動作電圧の範囲は、制御系100の定格電圧VRから、この定格電圧VRよりも低い電圧V3に渡っている。通信ユニット動作電圧の範囲は、制御系100の定格電圧VRより高い電圧から、電圧V2までである。この通信ユニット12の最低動作電圧V2は、制御ユニット11の最低動作電圧よりも高い。
【0030】
判定可能電圧とは、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定するのに必要な電圧である。バッテリー80の出力電圧が、判定可能電圧よりも低下すると、制御ユニット11は、接点21〜24,31の状態を正確に判定することができなくなる。このため従来は、バッテリー80の出力電圧が定格電圧VRから電圧V1近傍まで低下した場合には、制御ユニット11の動作をリセットさせていた。
【0031】
上述の判定可能電圧の範囲は、制御系100の定格電圧より高い電圧から、電圧V1までである。この判定可能電圧の最低動作電圧V1は、制御ユニット11の最低動作電圧及び通信ユニット12の最低動作電圧V2よりも高い。
【0032】
次に、上述のように構成された制御装置10の動作について説明する。制御装置10を構成する制御ユニット11は、シフト位置検出ユニット20の接点21〜24の動作状態から、シフトレバーの位置を検出する。また、ブレーキ状態検出ユニット30の接点31の動作状態から、ドライバによるブレーキ操作の有無を判定する。
【0033】
そして、制御ユニット11は、通信ネットワーク60から、通信ユニット12を介して現在の車両の速度、加速度等を取得し、これらの情報を加味して、ブレーキの状況とシフトレバーの位置とに基づいて、変速機を動作させるための制御信号を生成し出力する。
【0034】
また、制御ユニット11は、制御信号の生成と同時に、当該制御信号を生成する基礎となる基礎データを主記憶部11b或いは補助記憶部11cに記憶する。この基礎データは、シフト位置検出ユニット20の各接点21〜24の動作状態、ブレーキ状態検出ユニット30の接点31の動作状態、通信ユニット12を介して、通信ネットワーク60から取得した情報を含む。そして、シフト位置検出ユニット20の各接点21〜24の動作状態等は、例えば[0001]等のコードとして保存される。このコードは例えば、0が接点が開である状態を示し、1が接点が閉である状態を示す。
【0035】
制御ユニット11は、上述の動作と並行して、バッテリー80の電圧を監視する。そして、例えばアイドルストップ機能により停止したエンジンを始動する際に、バッテリー80の電圧が低下した場合には、制御ユニット11は、状況に応じた動作を行う。
【0036】
例えば、図4には、バッテリー80の出力電圧の推移を表す曲線が示されている。この曲線は、時刻t1に、エンジンの始動が行われたときの出力電圧の推移を示している。図4を参照するとわかるように、アイドルストップ機能によって停止しているエンジンが時刻t1に始動すると、時刻t2にバッテリー80の出力電圧が一旦電圧V1以下となる。なお、ここでは、出力電圧は、電圧V2以上である。そして、出力電圧は、時刻t2から時刻t3まで、電圧V1を下回った後、時刻t4に電圧が低下する前の電圧に復帰する。
【0037】
上述したように、出力電圧が電圧V1以下となると、制御ユニット11は、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することができなくなる。
【0038】
そこで、制御ユニット11は、図4に示されるように、バッテリー80の出力電圧が、電圧V1以下に低下した場合には、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを示す基礎データを、主記憶部11b或いは補助記憶部11cから読み出す。そして、読み出した基礎データと、通信ユニット12を介して通信ネットワーク60から取得した情報に基づいて、制御信号を生成し、変速機駆動ユニット50へ出力する。
【0039】
また、図5に示される曲線は、バッテリー80の出力電圧が、電圧V2以下まで低下したときの当該出力電圧の推移を示している。出力電圧が電圧V2以下のときには、制御ユニット11は、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを判定することができなくなる。また、通信ユニット12も正常に動作しなくなる。
【0040】
そこで、制御ユニット11は、図5に示されるように、バッテリー80の出力電圧が、電圧V2以下に低下した場合には、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、オフであるかを示す情報と、通信ユニット12を介して取得した情報とを含む基礎データを、主記憶部11b或いは補助記憶部11cから読み出す。そして、読み出した基礎データに基づいて、制御信号を生成し、変速機駆動ユニット50へ出力する。
【0041】
また、図6に示される曲線は、バッテリー80の出力電圧が、電圧V1以下まで低下した状態が、予め設定された時間(時間T23)だけ継続したときの当該出力電圧の推移を示している。図6を参照するとわかるように、バッテリー80の出力電圧が、一定時間以上、電圧V1を下回った場合には、制御ユニット11は、主記憶部11b及び補助記憶部11cに記憶された基礎データを消去する。同時に、通信ユニット12等をリセットする。これにより、制御系100が起動時の状態にリセットされる。
【0042】
以上説明したように、本実施形態では、バッテリー80の出力電圧が、電圧V1以下になることによって、制御ユニット11が、シフト位置検出ユニット20の接点21〜24、及びブレーキ状態検出ユニット30の接点31がオンであるか、或いはオフであるかを判定することが困難になった場合には、予め記憶されていた情報に基づいて、制御信号が生成され出力される。
【0043】
したがって、制御ユニット11は、バッテリー80の出力電圧が、電圧V1(判定可能電圧)以下に低下したとしても、制御系100の動作を継続して正確に行うことができる。また、バッテリー80の出力電圧が判定可能電圧以下に低下したとしても、制御系100の動作が継続して正確に行われる。このため、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【0044】
バッテリー80の出力電圧が、通信ユニット12の最低動作電圧V2より大きい場合には、通信ユニット12を介して、通信ネットワーク60から取得した情報は、信頼性が高いと考えられる。本実施形態では、バッテリー80の出力電圧が最低動作電圧V2よりも大きい場合には、通信ネットワーク60から取得した情報に基づいて、制御信号が生成され出力される。これにより、精度よく制御信号を生成することができる。
【0045】
本実施形態では、バッテリー80の出力電圧が、電圧V2以下になると、制御ユニット11は、接点21〜24,31がオンであるか、或いはオフであるかを判定することが困難になる。また、バッテリー80の出力電圧が、電圧V2以下になると、通信ユニット12が、正常に動作しなくなる。この場合には、予め記憶されていた情報に基づいて、制御信号が生成され出力される。
【0046】
したがって、制御ユニット11は、バッテリー80の出力電圧が電圧V2以下に低下したとしても、制御系100の動作を継続して正確に行うことができる。また、バッテリー80の出力電圧が電圧V2以下に低下したとしても、制御系100の動作が継続して正確に行われる。このため、アイドルストップ機能による動作を必要に応じて行うことができる。これにより、車両の燃費を向上させることができる。
【0047】
本実施形態では、バッテリー80の出力電圧が、一定時間以上、電圧V1を下回った場合には、記憶された基礎データが消去される。そして、通信ユニット12等がリセットされる。これにより、制御系100が起動時の状態にリセットされる。したがって、記憶された基礎データの内容と、実際のシフトレバーの位置等に代表される車両情報の内容とが乖離していたとしても、バッテリー80の出力電圧が復帰した後に、誤動作が誘発されることがなく、精度よく制御対象物を駆動することができる。
【0048】
以上、本発明の実施形態について説明したが、本発明は上記実施形態によって限定されるものではない。例えば本実施形態では、制御ユニット11にシフト位置検出ユニット20及びブレーキ状態検出ユニット30が接続されている場合について説明した。これに限らず、接点を有する他のユニットが、制御ユニット11に接続されていてもよい。他のユニットとしては、例えば車両のステアリングの位置を検出するユニット等が考えられる。
【0049】
制御ユニット11は、通信ユニット12を介して、情報を送信する場合には、当該情報を受信する制御対象機器の誤動作を回避するための内容を付加した後、情報の送信を実行することとしてもよい。
【0050】
制御ユニット11は、制御系100がリセットされた後は、不図示のセンサや、通信ユニット12を介して取得した情報に基づいて生成する出力を補正することとしてもよい。例えば、図7を参照するとわかるように、時刻t0でエンジンが始動した場合は、図中の仮想線で示されるように、エンジンの回転数が推移する。このため、時刻t0から一定時間経過した時刻t1で制御系100が復帰すると、制御系100は、回転数の初期値をNと認識し、この初期値に基づいて制御対象機器の制御を開始する。
【0051】
しかしながら、エンジンの回転数の初期値は零であるため、初期値をNとした制御を行うと、制御対象機器の動作が急峻になってしまうことがある。このため、制御ユニット11は、制御系100が復帰した時刻t1から時刻t2までの間は、図7に実線で示されるように回転数を補正し、補正後の回転数に関する情報を出力することとしてもよい。
【0052】
例えば、上記実施形態では、CPU11aが補助記憶部に記憶されたプログラムを実行することとした。これに限らず、制御ユニット11を、ハードウェアによって構成してもよい。
【0053】
また、制御装置10の補助記憶部11cに記憶されているプログラムは、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto-Optical disk)等のコンピュータで読み取り可能な記録媒体に格納して配布し、そのプログラムをコンピュータにインストールすることにより、上述の処理を実行する装置を構成することとしてもよい。
【0054】
なお、本発明は、本発明の広義の精神と範囲を逸脱することなく、様々な実施形態及び変形が可能とされるものである。また、上述した実施形態は、本発明を説明するためのものであり、本発明の範囲を限定するものではない。
【産業上の利用可能性】
【0055】
本発明の制御装置、制御方法及びプログラムは、バッテリーから供給されるパワーによって動作する制御対象物の制御に適している。
【符号の説明】
【0056】
10 制御装置
11 制御ユニット
11a CPU
11b 主記憶部
11c 補助記憶部
11d インターフェイス部
11e システムバス
12 通信ユニット
20 シフト位置検出ユニット
21〜24 接点
30 ブレーキ状態検出ユニット
31 接点
50 変速機駆動ユニット
60 通信ネットワーク
80 バッテリー
100 制御系
【特許請求の範囲】
【請求項1】
バッテリーから供給されるパワーによって動作する制御装置であって、
外部から入力される電気信号の値を保持する保持手段と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する生成手段と、
を備える制御装置。
【請求項2】
前記電気信号は、2値の信号である請求項1に記載の制御装置。
【請求項3】
前記閾値よりも動作電圧が低く、外部からの情報を受信する通信手段を備え、
前記生成手段は、前記バッテリーの電圧が前記閾値以下で、前記動作電圧よりも大きい場合に、前記通信手段によって受信された情報に基づいて、前記対象機器を制御するための制御信号を生成する請求項1又は2に記載の制御装置。
【請求項4】
前記通信手段は、前記バッテリーの電圧が前記閾値以下に低下した場合に、前記制御対象機器が誤動作しない情報を出力する請求項3に記載の制御装置。
【請求項5】
前記バッテリーの電圧が前記閾値以下に低下した状態が、一定期間以上継続した場合に、前記保持手段によって保持された前記電気信号の値をリセットするリセット手段を備える請求項1乃至4のいずれか一項に記載の制御装置。
【請求項6】
前記生成手段は、
前記リセット手段によってリセットが実行された後に、前記制御信号を補正して出力する請求項5に記載の制御装置。
【請求項7】
バッテリーから供給されるパワーによって動作する制御装置を用いて、制御対象機器を制御する制御方法であって、
外部から入力される電気信号の値を保持する工程と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する工程と、
を含む制御方法。
【請求項8】
バッテリーから供給されるパワーによって動作するコンピュータに、
外部から入力される電気信号の値を保持する手順と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する手順と、
を実行させるプログラム。
【請求項1】
バッテリーから供給されるパワーによって動作する制御装置であって、
外部から入力される電気信号の値を保持する保持手段と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する生成手段と、
を備える制御装置。
【請求項2】
前記電気信号は、2値の信号である請求項1に記載の制御装置。
【請求項3】
前記閾値よりも動作電圧が低く、外部からの情報を受信する通信手段を備え、
前記生成手段は、前記バッテリーの電圧が前記閾値以下で、前記動作電圧よりも大きい場合に、前記通信手段によって受信された情報に基づいて、前記対象機器を制御するための制御信号を生成する請求項1又は2に記載の制御装置。
【請求項4】
前記通信手段は、前記バッテリーの電圧が前記閾値以下に低下した場合に、前記制御対象機器が誤動作しない情報を出力する請求項3に記載の制御装置。
【請求項5】
前記バッテリーの電圧が前記閾値以下に低下した状態が、一定期間以上継続した場合に、前記保持手段によって保持された前記電気信号の値をリセットするリセット手段を備える請求項1乃至4のいずれか一項に記載の制御装置。
【請求項6】
前記生成手段は、
前記リセット手段によってリセットが実行された後に、前記制御信号を補正して出力する請求項5に記載の制御装置。
【請求項7】
バッテリーから供給されるパワーによって動作する制御装置を用いて、制御対象機器を制御する制御方法であって、
外部から入力される電気信号の値を保持する工程と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する工程と、
を含む制御方法。
【請求項8】
バッテリーから供給されるパワーによって動作するコンピュータに、
外部から入力される電気信号の値を保持する手順と、
前記バッテリーの電圧が閾値以下に低下した場合に、前記バッテリーの電圧が低下する前に、前記保持手段に保持された前記電気信号の値に基づいて、制御対象機器を制御するための制御信号を生成する手順と、
を実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−15036(P2013−15036A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−146540(P2011−146540)
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]