
制御装置、及び、制御方法
【課題】EEPROM異常に起因する異常データに基づいて制御対象を制御しないようにできる技術を提供する。
【解決手段】制御対象を制御する制御装置が、前記第1記憶部の異常を判定する場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致でない場合、及び、前記第2記憶部から読み出したデータが所定の容量である場合は、前記第2記憶部のデータを前記第1記憶部へ書き込み、前記第1記憶部の異常を判定する場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致である場合、前記第2記憶部から読み出したデータが所定の容量でない場合、及び、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータが一致しない場合は、制御対象を制御することを禁止するので、前記第2記憶部のデータが正確でない場合は、そのデータが前記第1記憶部へロードされず、異常データに基づいて制御対象を制御しないようにできる。
【解決手段】制御対象を制御する制御装置が、前記第1記憶部の異常を判定する場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致でない場合、及び、前記第2記憶部から読み出したデータが所定の容量である場合は、前記第2記憶部のデータを前記第1記憶部へ書き込み、前記第1記憶部の異常を判定する場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致である場合、前記第2記憶部から読み出したデータが所定の容量でない場合、及び、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータが一致しない場合は、制御対象を制御することを禁止するので、前記第2記憶部のデータが正確でない場合は、そのデータが前記第1記憶部へロードされず、異常データに基づいて制御対象を制御しないようにできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御対象を制御する技術に関する。
【背景技術】
【0002】
従来より、制御対象を御する制御装置においては、制御対象の経年変化や固体差などの影響を受けずに、最適な制御を実行できるよう、過去の目標制御値と目標制御値に基づいて実際に制御対象が制御された実測値との差分(オフセット)を考慮した制御値(学習値)を予めEEPROMへ書き込んでおき、次の制御の際にはEEPROMのデータをRAMへロードして、RAMの学習値に基づいて制御対象を制御する、学習制御が適用されている。
【0003】
制御の際に、学習値などのパラメータを消去して書き込みする記憶媒体は、EEPROMよりもアクセス速度が速いRAMのほうが適している。しかし、RAMは電力の供給が途絶えると記憶していたデータが消去されてしまうという欠点があるため、電源から制御装置への電力供給が停止されても、電源から常に電力が供給されるSRAMを用いて、迅速な制御を実現している。
【0004】
そのようなSRAMであっても、修理の際に電力の供給線が外されたり、事故によってその電力供給が途絶するなどしてデータが消去されてしまう虞があり、また、電気的なノイズの影響によりデータ異常が発生する虞があるため、SRAMに書き込まれるパラメータは、そのような虞が少ないEEPROMへバックアップデータとして書き込んでおく方法が適用されている。
【0005】
例えば、特許文献1に、このような、SRAM異常の際にEEPROMのバックアップデータをSRAMへロードさせる技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平2006-286111号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、EEPROMに記憶されているデータも、EEPROMの故障によりデータ異常が発生してしまう虞があり、その異常データを用いて制御対象を制御すると適切な制御が実行されない虞がある。
【0008】
本発明は、上記課題に鑑みてなされたものでありSRAMデータに基づいて制御対象を制御する際に、SRAMデータ及びEEPROMの異常を特定して、EEPROM異常に起因する異常データに基づいて制御対象を制御しないようにできる技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、請求項1の発明は、制御対象を制御する制御装置であって、電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部と、電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部と、制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、前記第1記憶部に書き込まれているデータを読み出す制御対象制御手段と、前記第1記憶部に書き込まれるデータを前記第2記憶部へ書き込む書込制御手段と、前記第1記憶部の異常を判定する第1異常判定手段と、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定手段と、前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定手段と、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定手段と、前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段とによる異常判定を行って、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御手段と、前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段の異常判定を行って、異常と判定した場合は、更に、第4異常判定手段による異常判定を行って、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御手段と、を備えることを特徴とする。
【0010】
また、請求項2の発明は、請求項1に記載の制御装置において、制御装置は、エンジンを制御してアイドリングストップ制御を実行する制御装置であり、前記第2セーフ制御手段は、アイドリングストップ制御を禁止することを特徴とする制御装置。
【0011】
また、請求項3の発明は、請求項2に記載の制御装置において、前記書込制御手段は、前記第1記憶部に書き込まれるスタータモータの駆動回数のデータを前記第2記憶部へ書き込むことを特徴とする。
【0012】
また、請求項4の発明は、制御対象を制御する制御方法であって、制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部に書き込まれているデータを読み出す制御対象制御工程と、前記第1記憶部に書き込まれるデータを、電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部へ書き込む書込制御工程と、前記第1記憶部の異常を判定する第1異常判定工程と、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定工程と、前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定工程と、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定工程と、前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程とによる異常判定を実行して、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御工程と、前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程の異常判定を実行して、異常と判定した場合は、更に、第4異常判定工程による異常判定を実行して、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御工程と、を備えることを特徴とする。
【発明の効果】
【0013】
請求項1ないし4の発明によれば、制御対象を制御する制御装置が、前記第1記憶部の異常を判定した場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致でない場合、及び、前記第2記憶部から読み出したデータが所定の容量である場合は、前記第2記憶部のデータを前記第1記憶部へ書き込み、前記第1記憶部の異常を判定した場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致である場合、前記第2記憶部から読み出したデータが所定の容量でない場合、及び、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合は、制御対象を制御することを禁止するので、前記第2記憶部のデータが正確でない場合は、そのデータが前記第1記憶部へロードされず、異常データに基づいて制御対象を制御しないようにできる。
【0014】
また、請求項2の発明によれば、エンジン搭載車両のアイドリングストップ制御において、第1記憶部、及び、第2記憶部における異常データに基づいた制御を禁止することができる。
【0015】
また、請求項3の発明によれば、エンジン搭載車両のアイドリングストップ制御において、第1記憶部、及び、第2記憶部におけるスタータモータ駆動回数データの異常に基づいた制御を禁止することができる。
【図面の簡単な説明】
【0016】
【図1】図1は、車両システムを説明する図である。
【図2】図2は、制御装置のシステムブロック図である。
【図3】図3は、制御を説明するフローチャート図である。
【図4】図4は、制御を説明するフローチャート図である。
【発明を実施するための形態】
【0017】
本発明は、制御対象を制御する技術に関するものであり、制御対象を制御する全ての技術分野に適用されるものであるが、便宜上、車両の制御装置を実施の形態として、添付図面を参照しながら説明を行う。
【0018】
<代表の形態>
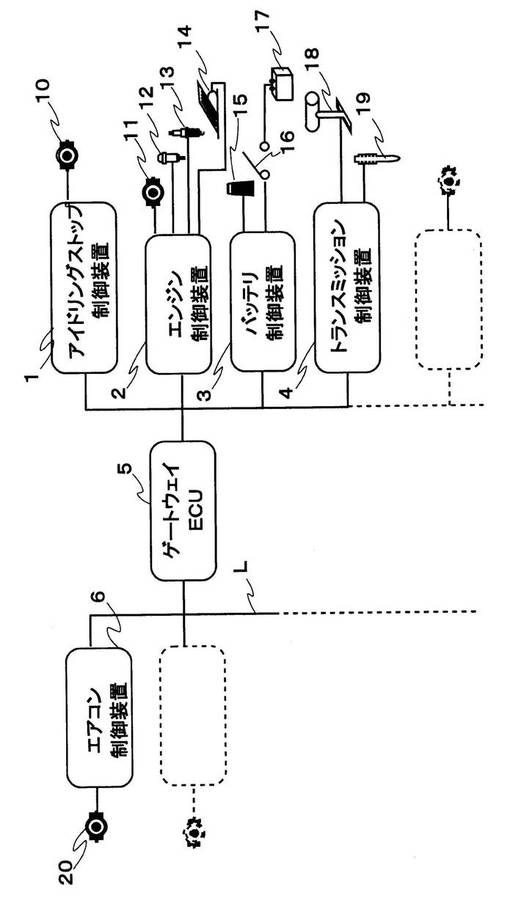
(システムブロック図)
図1は代表の形態における、車両の制御システムを示す。車両の制御システムは、例えば、CAN(Control Area Network)と呼ばれる車載ネットワークLに、複数の制御装置が接続されている。複数の制御装置は、各制御装置が制御する制御対象と接続されている。これら制御装置は、例えば、ECU(Electronic control Unit)と呼ばれる。
【0019】
複数の制御装置のうちゲートウェイ制御装置5は、複数の車載ネットワークにおいて伝送されるデータを交通制御する。複数の車載ネットワークには、車両の走行に関連する制御装置が接続されたパワー系ネットワークと、情報提供に関連する制御装置が接続された情報系ネットワークと、電装品に関連する制御装置が接続されたボディ系ネットワークなどがある。
【0020】
パワー系ネットワークには、アイドリングストップ制御装置1、エンジン制御装置2、バッテリ制御装置3、及び、トランスミッション制御装置4などの制御装置が接続されている。
【0021】
アイドリングストップ制御装置1は、制御部が主にエンジン回転数センサなどからの入力値に基づいて、車両のエンジンをクランキング制御する際にその回転力を補助させるための制御対象であるスタータモータ10を制御する。エンジン制御装置2は、制御部が主にアクセル検知部14などからの入力値に基づいて、エンジントルクを制御するための制御対象であるスロットルモータ11、インジェクタ12、及び、点火プラグ13を制御する。バッテリ制御装置3は、制御部が主にバッテリの電圧センサ15などからの入力値に基づいて、電力を蓄放電させるための制御対象であるスイッチ16を制御する。トランスミッション制御装置4は、制御部が主に変速レバーに接続される変速段センサ18などからの入力値に基づいて、変速段を変速させるための制御対象であるソレノイド19などを制御する。
【0022】
ボディ系ネットワークには、エアコン制御装置8などが接続されている。
【0023】
エアコン制御装置8は、制御部が主に温度センサなどからの入力値に基づいて、車室内の空気を調整するための制御対象であるモータ20を制御する。
【0024】
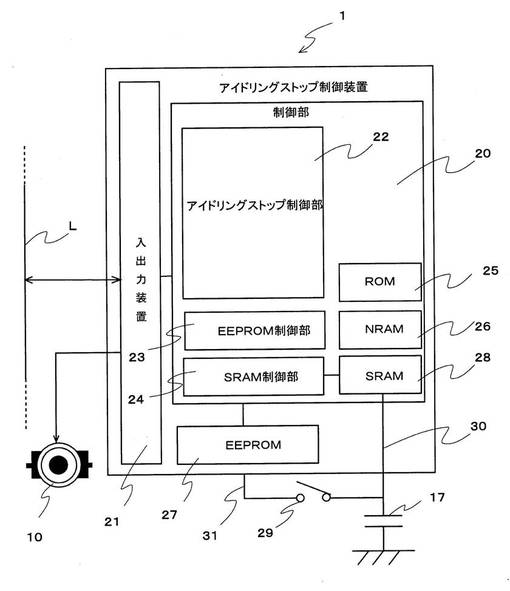
(制御装置)
図2にアイドリングストップ制御装置1のシステムブロックを示す。
【0025】
アイドリングストップ制御装置1は、学習制御値や制御履歴データなどが書込まれ、電源17から導かれる第2系統30より電力の供給を受けるRAMであって第1記憶部であるSRAM(STANDBY RAM)28、学習制御値や制御履歴データなどのバックアップデータが書込まれ、書込みと読み出しが可能な不揮発性記憶部であって第2記憶部であるEEPROM27、アイドリングストップ機能を発揮するための制御プログラムが書込まれている不揮発性記憶部であって第3記憶部であるROM25、制御部20が演算する際に一時的に値を書込む揮発性記憶部であって、第4記憶部であるNRAM26、及び、アイドリングストップ制御装置1へ入力される入力信号やその外部へ出力する出力信号を制御する入出力装置21を備える。更に、ROM25に書込まれている制御プログラムと、NRAM26やSRAM28に書き込まれている制御パラメータと、センサや車載ネットワークLなどからの入力信号と、に基づいてスタータモータ10などを制御するアイドリングストップ機能を発揮する制御部であるマイコン20を備える。
【0026】
制御部であるマイコン20は、アイドリングストップ制御部22、EEPROM制御部23、及び、SRAM制御部24を備える。
【0027】
アイドリングストップ制御部22は、後述するアイドリングストップ制御を実行して、アイドリングストップ機能を、他の電子部品や他の制御装置などの制御要素と協働することによって発揮する。
【0028】
EEPROM制御部23は、アイドリングストップ制御部22からの指示を受けてEEPROM27のデータを読み出しや、書き込みをする制御を実行する。また、後述するEEPROM27における異常判定処理を実行する。
【0029】
SRAM制御部24は、アイドリングストップ制御部22からの指示を受けてSRAM28のデータを読み出しや、書き込みをする制御を実行する。また、後述するSRAM28における異常判定処理を実行する。
【0030】
なお、アイドリングストップ制御装置1は、電源17から導かれる第1系統31より電力の供給を受けて、アイドリングストップ機能を発揮させる。この第1系統31は、ユーザによりイグニッションスイッチ、及び、プッシュスタートスイッチなどのユーザスイッチ29が操作されたことによって、車両の制御システムが起動される際に、アイドリングストップ制御装置1などの制御装置へ電力の供給を行う。他方で、第2系統30は、ユーザスイッチ29の操作に関係なくSRAM28へ電力の供給を行う。
【0031】
(アイドリングストップ機能)
アイドリングストップ機能とは、燃費を抑制するエンジン制御であって、ユーザスイッチ29の操作によりエンジンを始動させてから、ユーザによるユーザスイッチ29の操作によりエンジンを停止させるまでにおいて、車速が0になって車両が停車するなどの条件を満たすとエンジンを停止し、その後にユーザのアクセル操作を検知するなどの条件を満たすとエンジンを始動する機能をいう。
【0032】
(アイドリングストップ制御)
アイドリングストップ制御装置1における制御部20のアイドリングストップ制御部22は、図3に示すステップS100において、アイドリングストップ制御を実行する。アイドリングストップ制御は、アイドリングストップ制御におけるエンジン停止制御と、アイドリングストップ制御におけるエンジン始動制御とから構成される。これら制御とは別に、これら制御を実行する際に利用する記憶部に記憶されているデータ異常を判定する制御(データ異常判定制御)や、データ異常を判定した場合に対処する制御(フェールセーフ制御)を実行する。
【0033】
アイドリングストップ制御部22は、アイドリングストップ制御の際に利用するパラメータをNRAM26へ一時的に書き込む。そして、アイドリングストップ制御部22は、NRAM26からそのパラメータを読み出しその制御において利用する。そのパラメータが学習制御により最適化されるパラメータ、つまり、学習値が次のトリップ時のアイドリングストップ制御の際に利用するものである場合は、SRAM28へ書き込んでおき、次トリップ時のアイドリングストップ制御の際にSRAM28に書込まれている学習値を読み出して利用する。
【0034】
ここで、1トリップとは、ユーザによるユーザスイッチSWの操作によりエンジンを始動させてから、ユーザによるユーザスイッチSWの操作によりエンジンを停止させるまでを1トリップという。
【0035】
また、アイドリングストップ制御部22は、アイドリングストップ制御におけるエンジン始動制御の際に、スタータモータ10を制御してエンジンをクランキング制御すると、スタータモータを駆動させた回数をカウントし、その駆動回数をSRAM28に書込んでいる。アイドリングストップ制御部22は、エンジン始動制御においてスタータモータ10を駆動させる際は、SRAM28に書き込まれているスタータモータ駆動回数を読み出して、その回数が所定回数(数十万回)以上であるか否かを判定する。そして、その回数が所定回数以上であると判定した場合は、スタータモータが劣化していると判断し、アイドリングストップ制御を禁止する制御(セーフ制御)を実行する。他方、その回数が所定回数以上であると判定しない場合は、アイドリングストップ制御を禁止しない。これにより、制御の安全を図っている。
【0036】
更に、EEPROM制御部23はEEPROM27へSRAM28に書込んでいる学習値やスタータモータ駆動回数を書き込む。つまり、EEPROM制御部23はSRAM28に書込まれた学習値やスータータモータ駆動回数をバックアップデータとしてEEPROM27へ書込む。
【0037】
学習値やスタータモータ駆動回数をSRAM28へ書込むのは、SRAM28が、電源からの電力が制御装置へ供給されていないトリップ間においても、電源から電力が常に供給されることによってデータを保持することができ、かつ、アイドリング制御部22からのアクセス速度がEEPROM27よりも速いからである。つまり、エンジン始動制御を迅速にできるからである。
【0038】
また、EEPROM制御部23が、SRAM28へ書込まれているデータをバックアップデータとしてEEPROM27へ書込むのは、SRAM28が、修理の際に電力の供給線が外されたり、事故によってその電力供給が途絶するなどしてデータが消去されてしまう虞があり、また、電気的なノイズの影響によりデータ異常が発生する虞があるため、SRAMに書き込まれるデータを、そのような虞が少ないEEPROMへ書き込んでおく必要があるからである。
【0039】
(エンジン停止制御)
まず、エンジン停止制御について説明する。
【0040】
エンジン制御装置2が以下の(1)〜(6)までの条件(エンジン停止条件)を満たすことによりエンジンを停止するエンジン停止制御を実行する。
(1)エンジン制御装置2が車速検知部からの入力信号に基づいて、車速が0であると判断する場合。
(2)エンジン制御装置2がアクセル検知部14からの入力信号に基づいて、アクセルが操作されていないと判断する場合。
(3)エンジン制御装置2がブレーキ検知部からの入力信号に基づいて、ブレーキが操作されていると判断する場合。
(4)エンジン制御装置2がトランスミッション制御装置4からの入力信号に基づいて、変速段がドライブであると判断する場合。
(5)エンジン制御装置2がバッテリ制御装置3からの入力信号に基づいて、その容量が所定容量以上であると判断する場合。
(6)他の制御によりアイドル制御を維持しなければならない状態でない場合。
【0041】
なお、アイドリングストップ機能によるエンジン始動制御の条件は上記に限られず、アイドリングストップ機能の目的に合致する限りにおいて、種々の条件を付加するものであってもよく、上記条件の何れかを削除するものであってもよい。
【0042】
エンジン制御装置2は上記条件を満たすことによってエンジンを停止制御する。アイドリングストップ機能によるエンジンの停止制御は、点火部11、燃料噴射部12、及び、吸気部13の制御を停止してエンジン回転数を0にすることによって実現する。
【0043】
このように、アイドリングストップ制御の一部をエンジン制御装置2が担っていると言えるため、エンジン制御装置2もアイドリングストップ制御装置と考えることができる。
【0044】
(エンジン始動制御)
次に、エンジン始動制御について説明する。
【0045】
アイドリングストップ制御装置1が以下の(7)〜(9)までの条件(エンジン始動条件)を満たすことによってスタータモータ10を駆動制御してエンジンを始動するエンジン始動制御を実行する。
(7)アイドリングストップ制御装置1が、エンジン制御装置2から入力するアクセル操作検知信号に基づいて、アイドルストップ状態からアクセル操作がされたと判断する場合。
(8)アイドリングストップ制御装置1が、エンジン制御装置2から入力するブレーキ操作検知信号に基づいて、ブレーキが操作されていないと判断する場合。
(9)アイドリングストップ制御装置1が、トランスミッション制御装置4から入力する変速段検知信号に基づいて、変速段がドライブであると判断する場合。
【0046】
なお、アイドリングストップ機能によるエンジン始動制御の条件は上記に限られず、アイドリングストップ機能の目的に合致する限りにおいて、種々の条件を付加するものであってもよく、上記条件の何れかを削除するものであってもよい。
【0047】
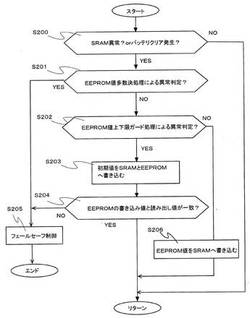
(データ異常判定制御)
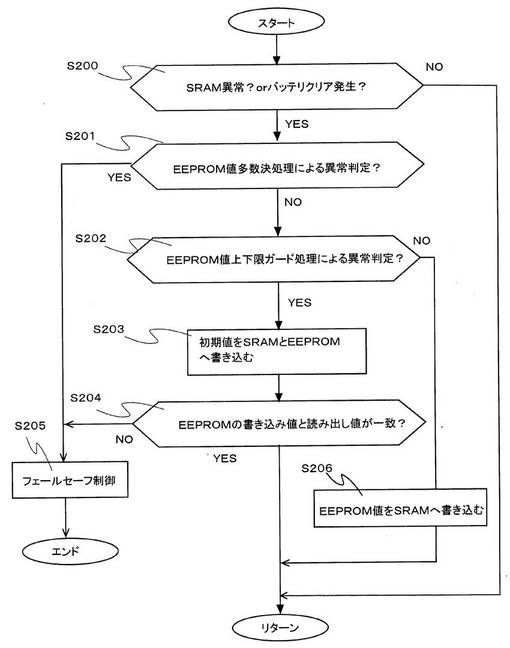
アイドリングストップ制御におけるエンジン停止制御やエンジン始動制御とは別に、これら制御を実行する際に利用する記憶部に記憶されているデータ異常を判定する制御、つまり、データ異常判定制御について図4に基づいて説明する。なお、データ異常判定制御は、制御部20が所定の周期で実行し、車両システムの終了とともに終了する。
【0048】
(第1異常判定・SRAM異常判定制御、バッテリクリア判定制御)
ステップS200において、アイドリングストップ制御装置1における制御部20のSRAM制御部24は、SRAM異常か否かを判定する。または、バッテリ17が車両システムから外されたことにより、SRAM28への電力の供給が停止したか否か、つまり、バッテリクリアがされたか否かを判定する。換言すると、SRAM制御部24は、SRAM28に書き込まれているデータが電気的なノイズが影響して化けて異常になっていないか、或いは、SRAM28への電力の供給が停止して、SRAM28に書き込まれているデータが消去されていないかを判定する第1異常判定を行う。SRAM制御部24は、SRAM28に書き込まれているデータが異常であると判定した場合、または、SRAM28に書き込まれているデータが消去されていると判定した場合は、ステップS201へ移行する。SRAM制御部24は、SRAM28に書き込まれているデータが異常であると判定しない場合、または、SRAM28に書き込まれているデータが消去されていると判定しない場合、すなわち、正常な場合は、リターンへ移行する。
【0049】
(第2異常判定・多数決制御)
ステップS201において、アイドリングストップ制御装置1におけるEEPROM制御部23は、データをEEPROM27へ書き込む際にそのデータと同一のデータを複数書き込んでおり、その書き込んだEEPROM27の同じアドレスから複数のデータを読み出して、読み出したその複数のデータが相互に一致するか否かを判定する。EEPROM制御部23は、それら全てのデータが一致する場合、または、それらデータのうち、一部が一致する場合で一致するデータ数が一致しないデータ数よりも多い場合は、EEPROM27に書き込まれているデータが異常ではないと判定する。異常であると判定しない場合は、ステップS202へ移行する。
【0050】
EEPROM制御部23は、それら全てのデータが一致しない場合、または、それらデータのうち、一部が一致する場合で一致するデータ数が一致しないデータ数よりも少ない場合は、EEPROM27に書き込まれているデータが異常であると判定する。異常であると判定した場合は、ステップS205へ移行する。
【0051】
このような第2異常判定である多数決制御を、EEPROM27に書き込まれているデータに対し行えば、EEPROM27に書き込まれているデータが電気的なノイズが影響して化けることがあっても、書き込まれた複数のデータうち一部のデータのみが化けてしまうことが多いため、化けていない正常なデータを読み出すことができるとともに、複数のデータのうち多数が異なるデータに化けてしまった際にデータ異常を判定することができる。
【0052】
(第3異常判定・上下限ガード制御)
ステップS202において、アイドリングストップ制御装置1におけるEEPROM制御部23は、EEPROM27へ書き込んだデータを2進数として加算した値が、所定の上限値以下であり、かつ、所定の下限値以上であるか(予定された値の範囲内であるか)否かを判定する。つまり、EEPROM27へ書き込んだデータが予定された容量であるか否かを判定する。EEPROM制御部23は、EEPROM27へ書き込んだデータが予定された容量であると判定しない場合、ステップS203へ移行する。EEPROM27へ書き込んだデータが予定された容量であると判定した場合、ステップS206へ移行する。
【0053】
ステップS206において、EEPROM制御部23は、EEPROM27のバックアップデータであるスタータモータ駆動回数を読み出してSRAM28へ書き込む。次に、リターンへ移行する。
【0054】
このような第3異常判定である上下限ガード制御を、EEPROM27に書き込まれているデータに対し行えば、EEPROM27に書き込まれているデータが電気的なノイズの影響により同一の複数のデータが同じように化けて第2異常判定である多数決制御において異常判定されなかった場合で、かつ、ノイズの影響によりそのデータ容量よりも大きくなったり小さくなったりする場合に、データ異常を判定することができる。
【0055】
(第4異常判定・ベリファイ制御)
ステップ203において、アイドリングストップ制御装置1における制御部20のSRAM制御部24は、ROM25から所定値(例えば、スタータモータ駆動回数であればテストデータとしての一定の値を、制御における学習値であればその初期値)を読み出して、読み出した所定値をSRAM28へ書き込む。また、EEPROM制御部23は、ROM25から所定値を読み出して、読み出した所定値をEEPROM27へ書き込む。次にステップS204へ移行する。
【0056】
ステップS204において、EEPROM制御部23は、EEPROM23へ所定値を書き込んだ同一のアドレスからデータを読み出して、書き込んだ所定値と読み出したデータが一致するか否かを判定する。一致すると判定しない場合は、ステップS205へ移行する。一致すると判定した場合は、リターンへ移行する。
【0057】
第2異常判定(ステップS201)や第3異常判定(ステップS202)において判定するデータは、その書き込みからその読み出しまでの間に相当の時間が経過している場合があり、その時間において電気的なノイズが影響してデータが化けたデータ異常の可能性があって、EEPROM27異常であるのか、単にデータが化けたデータ異常であるのかは特定できなかった。そこで、このような第4異常判定であるベリファイ制御を、EEPROM27に対して行えば、判定するデータの書き込みから読み出しまでの時間はかなり短いため、EEPROM27の故障を特定できる。
【0058】
(フェールセーフ制御)
ステップ205において、アイドリングストップ制御装置22は、EEPROM27が故障しているため、アイドリングストップ制御を禁止する。
【0059】
アイドリングストップ制御において、SRAM28のスタータモータ駆動回数が所定回以上の場合にアイドリングストップ制御を禁止して、スタータモータ10の劣化を判断するとともに、スタータモータ10の交換をユーザへ促して運転における不測の事態を回避しているが、このようなフェールセーフ制御により、SRAM28に書き込まれている学習値やスタータモータ駆動回数データのデータ異常が発生している場合と、EEPROM異常によるEEPROM27にバックアップデータとして書き込まれている学習値やスタータモータ駆動回数データのデータ異常が発生している場合に、その運転における不測の事態を回避できないという虞がなくなる。
【0060】
<変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。
【0061】
また、上記実施の形態では、プログラムに従った制御部であるマイコンの演算処理によってソフトウェア的に各種の機能が実現されると説明したが、これら機能のうちの一部は電気的なハードウェア回路により実現されても良い。また逆に、ハードウェア回路によって実現されるとした機能のうちの一部は、ソフトウェア的に実現されても良い。
【0062】
更に、制御を説明するフローチャート図における各処理は、便宜上、一の系列で示しているが、細分化された各処理を各制御部がマルチタスク制御機能により並列に処理するものであっても良い。
【符号の説明】
【0063】
1 アイドリングストップ制御装置
10 スタータモータ
20 制御部
22 アイドリングストップ制御部
23 EEPROM制御部
24 SRAM制御部
27 EEPROM
28 SRAM
【技術分野】
【0001】
本発明は、制御対象を制御する技術に関する。
【背景技術】
【0002】
従来より、制御対象を御する制御装置においては、制御対象の経年変化や固体差などの影響を受けずに、最適な制御を実行できるよう、過去の目標制御値と目標制御値に基づいて実際に制御対象が制御された実測値との差分(オフセット)を考慮した制御値(学習値)を予めEEPROMへ書き込んでおき、次の制御の際にはEEPROMのデータをRAMへロードして、RAMの学習値に基づいて制御対象を制御する、学習制御が適用されている。
【0003】
制御の際に、学習値などのパラメータを消去して書き込みする記憶媒体は、EEPROMよりもアクセス速度が速いRAMのほうが適している。しかし、RAMは電力の供給が途絶えると記憶していたデータが消去されてしまうという欠点があるため、電源から制御装置への電力供給が停止されても、電源から常に電力が供給されるSRAMを用いて、迅速な制御を実現している。
【0004】
そのようなSRAMであっても、修理の際に電力の供給線が外されたり、事故によってその電力供給が途絶するなどしてデータが消去されてしまう虞があり、また、電気的なノイズの影響によりデータ異常が発生する虞があるため、SRAMに書き込まれるパラメータは、そのような虞が少ないEEPROMへバックアップデータとして書き込んでおく方法が適用されている。
【0005】
例えば、特許文献1に、このような、SRAM異常の際にEEPROMのバックアップデータをSRAMへロードさせる技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平2006-286111号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、EEPROMに記憶されているデータも、EEPROMの故障によりデータ異常が発生してしまう虞があり、その異常データを用いて制御対象を制御すると適切な制御が実行されない虞がある。
【0008】
本発明は、上記課題に鑑みてなされたものでありSRAMデータに基づいて制御対象を制御する際に、SRAMデータ及びEEPROMの異常を特定して、EEPROM異常に起因する異常データに基づいて制御対象を制御しないようにできる技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、請求項1の発明は、制御対象を制御する制御装置であって、電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部と、電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部と、制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、前記第1記憶部に書き込まれているデータを読み出す制御対象制御手段と、前記第1記憶部に書き込まれるデータを前記第2記憶部へ書き込む書込制御手段と、前記第1記憶部の異常を判定する第1異常判定手段と、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定手段と、前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定手段と、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定手段と、前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段とによる異常判定を行って、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御手段と、前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段の異常判定を行って、異常と判定した場合は、更に、第4異常判定手段による異常判定を行って、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御手段と、を備えることを特徴とする。
【0010】
また、請求項2の発明は、請求項1に記載の制御装置において、制御装置は、エンジンを制御してアイドリングストップ制御を実行する制御装置であり、前記第2セーフ制御手段は、アイドリングストップ制御を禁止することを特徴とする制御装置。
【0011】
また、請求項3の発明は、請求項2に記載の制御装置において、前記書込制御手段は、前記第1記憶部に書き込まれるスタータモータの駆動回数のデータを前記第2記憶部へ書き込むことを特徴とする。
【0012】
また、請求項4の発明は、制御対象を制御する制御方法であって、制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部に書き込まれているデータを読み出す制御対象制御工程と、前記第1記憶部に書き込まれるデータを、電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部へ書き込む書込制御工程と、前記第1記憶部の異常を判定する第1異常判定工程と、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定工程と、前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定工程と、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定工程と、前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程とによる異常判定を実行して、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御工程と、前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程の異常判定を実行して、異常と判定した場合は、更に、第4異常判定工程による異常判定を実行して、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御工程と、を備えることを特徴とする。
【発明の効果】
【0013】
請求項1ないし4の発明によれば、制御対象を制御する制御装置が、前記第1記憶部の異常を判定した場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致でない場合、及び、前記第2記憶部から読み出したデータが所定の容量である場合は、前記第2記憶部のデータを前記第1記憶部へ書き込み、前記第1記憶部の異常を判定した場合、複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致である場合、前記第2記憶部から読み出したデータが所定の容量でない場合、及び、前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合は、制御対象を制御することを禁止するので、前記第2記憶部のデータが正確でない場合は、そのデータが前記第1記憶部へロードされず、異常データに基づいて制御対象を制御しないようにできる。
【0014】
また、請求項2の発明によれば、エンジン搭載車両のアイドリングストップ制御において、第1記憶部、及び、第2記憶部における異常データに基づいた制御を禁止することができる。
【0015】
また、請求項3の発明によれば、エンジン搭載車両のアイドリングストップ制御において、第1記憶部、及び、第2記憶部におけるスタータモータ駆動回数データの異常に基づいた制御を禁止することができる。
【図面の簡単な説明】
【0016】
【図1】図1は、車両システムを説明する図である。
【図2】図2は、制御装置のシステムブロック図である。
【図3】図3は、制御を説明するフローチャート図である。
【図4】図4は、制御を説明するフローチャート図である。
【発明を実施するための形態】
【0017】
本発明は、制御対象を制御する技術に関するものであり、制御対象を制御する全ての技術分野に適用されるものであるが、便宜上、車両の制御装置を実施の形態として、添付図面を参照しながら説明を行う。
【0018】
<代表の形態>
(システムブロック図)
図1は代表の形態における、車両の制御システムを示す。車両の制御システムは、例えば、CAN(Control Area Network)と呼ばれる車載ネットワークLに、複数の制御装置が接続されている。複数の制御装置は、各制御装置が制御する制御対象と接続されている。これら制御装置は、例えば、ECU(Electronic control Unit)と呼ばれる。
【0019】
複数の制御装置のうちゲートウェイ制御装置5は、複数の車載ネットワークにおいて伝送されるデータを交通制御する。複数の車載ネットワークには、車両の走行に関連する制御装置が接続されたパワー系ネットワークと、情報提供に関連する制御装置が接続された情報系ネットワークと、電装品に関連する制御装置が接続されたボディ系ネットワークなどがある。
【0020】
パワー系ネットワークには、アイドリングストップ制御装置1、エンジン制御装置2、バッテリ制御装置3、及び、トランスミッション制御装置4などの制御装置が接続されている。
【0021】
アイドリングストップ制御装置1は、制御部が主にエンジン回転数センサなどからの入力値に基づいて、車両のエンジンをクランキング制御する際にその回転力を補助させるための制御対象であるスタータモータ10を制御する。エンジン制御装置2は、制御部が主にアクセル検知部14などからの入力値に基づいて、エンジントルクを制御するための制御対象であるスロットルモータ11、インジェクタ12、及び、点火プラグ13を制御する。バッテリ制御装置3は、制御部が主にバッテリの電圧センサ15などからの入力値に基づいて、電力を蓄放電させるための制御対象であるスイッチ16を制御する。トランスミッション制御装置4は、制御部が主に変速レバーに接続される変速段センサ18などからの入力値に基づいて、変速段を変速させるための制御対象であるソレノイド19などを制御する。
【0022】
ボディ系ネットワークには、エアコン制御装置8などが接続されている。
【0023】
エアコン制御装置8は、制御部が主に温度センサなどからの入力値に基づいて、車室内の空気を調整するための制御対象であるモータ20を制御する。
【0024】
(制御装置)
図2にアイドリングストップ制御装置1のシステムブロックを示す。
【0025】
アイドリングストップ制御装置1は、学習制御値や制御履歴データなどが書込まれ、電源17から導かれる第2系統30より電力の供給を受けるRAMであって第1記憶部であるSRAM(STANDBY RAM)28、学習制御値や制御履歴データなどのバックアップデータが書込まれ、書込みと読み出しが可能な不揮発性記憶部であって第2記憶部であるEEPROM27、アイドリングストップ機能を発揮するための制御プログラムが書込まれている不揮発性記憶部であって第3記憶部であるROM25、制御部20が演算する際に一時的に値を書込む揮発性記憶部であって、第4記憶部であるNRAM26、及び、アイドリングストップ制御装置1へ入力される入力信号やその外部へ出力する出力信号を制御する入出力装置21を備える。更に、ROM25に書込まれている制御プログラムと、NRAM26やSRAM28に書き込まれている制御パラメータと、センサや車載ネットワークLなどからの入力信号と、に基づいてスタータモータ10などを制御するアイドリングストップ機能を発揮する制御部であるマイコン20を備える。
【0026】
制御部であるマイコン20は、アイドリングストップ制御部22、EEPROM制御部23、及び、SRAM制御部24を備える。
【0027】
アイドリングストップ制御部22は、後述するアイドリングストップ制御を実行して、アイドリングストップ機能を、他の電子部品や他の制御装置などの制御要素と協働することによって発揮する。
【0028】
EEPROM制御部23は、アイドリングストップ制御部22からの指示を受けてEEPROM27のデータを読み出しや、書き込みをする制御を実行する。また、後述するEEPROM27における異常判定処理を実行する。
【0029】
SRAM制御部24は、アイドリングストップ制御部22からの指示を受けてSRAM28のデータを読み出しや、書き込みをする制御を実行する。また、後述するSRAM28における異常判定処理を実行する。
【0030】
なお、アイドリングストップ制御装置1は、電源17から導かれる第1系統31より電力の供給を受けて、アイドリングストップ機能を発揮させる。この第1系統31は、ユーザによりイグニッションスイッチ、及び、プッシュスタートスイッチなどのユーザスイッチ29が操作されたことによって、車両の制御システムが起動される際に、アイドリングストップ制御装置1などの制御装置へ電力の供給を行う。他方で、第2系統30は、ユーザスイッチ29の操作に関係なくSRAM28へ電力の供給を行う。
【0031】
(アイドリングストップ機能)
アイドリングストップ機能とは、燃費を抑制するエンジン制御であって、ユーザスイッチ29の操作によりエンジンを始動させてから、ユーザによるユーザスイッチ29の操作によりエンジンを停止させるまでにおいて、車速が0になって車両が停車するなどの条件を満たすとエンジンを停止し、その後にユーザのアクセル操作を検知するなどの条件を満たすとエンジンを始動する機能をいう。
【0032】
(アイドリングストップ制御)
アイドリングストップ制御装置1における制御部20のアイドリングストップ制御部22は、図3に示すステップS100において、アイドリングストップ制御を実行する。アイドリングストップ制御は、アイドリングストップ制御におけるエンジン停止制御と、アイドリングストップ制御におけるエンジン始動制御とから構成される。これら制御とは別に、これら制御を実行する際に利用する記憶部に記憶されているデータ異常を判定する制御(データ異常判定制御)や、データ異常を判定した場合に対処する制御(フェールセーフ制御)を実行する。
【0033】
アイドリングストップ制御部22は、アイドリングストップ制御の際に利用するパラメータをNRAM26へ一時的に書き込む。そして、アイドリングストップ制御部22は、NRAM26からそのパラメータを読み出しその制御において利用する。そのパラメータが学習制御により最適化されるパラメータ、つまり、学習値が次のトリップ時のアイドリングストップ制御の際に利用するものである場合は、SRAM28へ書き込んでおき、次トリップ時のアイドリングストップ制御の際にSRAM28に書込まれている学習値を読み出して利用する。
【0034】
ここで、1トリップとは、ユーザによるユーザスイッチSWの操作によりエンジンを始動させてから、ユーザによるユーザスイッチSWの操作によりエンジンを停止させるまでを1トリップという。
【0035】
また、アイドリングストップ制御部22は、アイドリングストップ制御におけるエンジン始動制御の際に、スタータモータ10を制御してエンジンをクランキング制御すると、スタータモータを駆動させた回数をカウントし、その駆動回数をSRAM28に書込んでいる。アイドリングストップ制御部22は、エンジン始動制御においてスタータモータ10を駆動させる際は、SRAM28に書き込まれているスタータモータ駆動回数を読み出して、その回数が所定回数(数十万回)以上であるか否かを判定する。そして、その回数が所定回数以上であると判定した場合は、スタータモータが劣化していると判断し、アイドリングストップ制御を禁止する制御(セーフ制御)を実行する。他方、その回数が所定回数以上であると判定しない場合は、アイドリングストップ制御を禁止しない。これにより、制御の安全を図っている。
【0036】
更に、EEPROM制御部23はEEPROM27へSRAM28に書込んでいる学習値やスタータモータ駆動回数を書き込む。つまり、EEPROM制御部23はSRAM28に書込まれた学習値やスータータモータ駆動回数をバックアップデータとしてEEPROM27へ書込む。
【0037】
学習値やスタータモータ駆動回数をSRAM28へ書込むのは、SRAM28が、電源からの電力が制御装置へ供給されていないトリップ間においても、電源から電力が常に供給されることによってデータを保持することができ、かつ、アイドリング制御部22からのアクセス速度がEEPROM27よりも速いからである。つまり、エンジン始動制御を迅速にできるからである。
【0038】
また、EEPROM制御部23が、SRAM28へ書込まれているデータをバックアップデータとしてEEPROM27へ書込むのは、SRAM28が、修理の際に電力の供給線が外されたり、事故によってその電力供給が途絶するなどしてデータが消去されてしまう虞があり、また、電気的なノイズの影響によりデータ異常が発生する虞があるため、SRAMに書き込まれるデータを、そのような虞が少ないEEPROMへ書き込んでおく必要があるからである。
【0039】
(エンジン停止制御)
まず、エンジン停止制御について説明する。
【0040】
エンジン制御装置2が以下の(1)〜(6)までの条件(エンジン停止条件)を満たすことによりエンジンを停止するエンジン停止制御を実行する。
(1)エンジン制御装置2が車速検知部からの入力信号に基づいて、車速が0であると判断する場合。
(2)エンジン制御装置2がアクセル検知部14からの入力信号に基づいて、アクセルが操作されていないと判断する場合。
(3)エンジン制御装置2がブレーキ検知部からの入力信号に基づいて、ブレーキが操作されていると判断する場合。
(4)エンジン制御装置2がトランスミッション制御装置4からの入力信号に基づいて、変速段がドライブであると判断する場合。
(5)エンジン制御装置2がバッテリ制御装置3からの入力信号に基づいて、その容量が所定容量以上であると判断する場合。
(6)他の制御によりアイドル制御を維持しなければならない状態でない場合。
【0041】
なお、アイドリングストップ機能によるエンジン始動制御の条件は上記に限られず、アイドリングストップ機能の目的に合致する限りにおいて、種々の条件を付加するものであってもよく、上記条件の何れかを削除するものであってもよい。
【0042】
エンジン制御装置2は上記条件を満たすことによってエンジンを停止制御する。アイドリングストップ機能によるエンジンの停止制御は、点火部11、燃料噴射部12、及び、吸気部13の制御を停止してエンジン回転数を0にすることによって実現する。
【0043】
このように、アイドリングストップ制御の一部をエンジン制御装置2が担っていると言えるため、エンジン制御装置2もアイドリングストップ制御装置と考えることができる。
【0044】
(エンジン始動制御)
次に、エンジン始動制御について説明する。
【0045】
アイドリングストップ制御装置1が以下の(7)〜(9)までの条件(エンジン始動条件)を満たすことによってスタータモータ10を駆動制御してエンジンを始動するエンジン始動制御を実行する。
(7)アイドリングストップ制御装置1が、エンジン制御装置2から入力するアクセル操作検知信号に基づいて、アイドルストップ状態からアクセル操作がされたと判断する場合。
(8)アイドリングストップ制御装置1が、エンジン制御装置2から入力するブレーキ操作検知信号に基づいて、ブレーキが操作されていないと判断する場合。
(9)アイドリングストップ制御装置1が、トランスミッション制御装置4から入力する変速段検知信号に基づいて、変速段がドライブであると判断する場合。
【0046】
なお、アイドリングストップ機能によるエンジン始動制御の条件は上記に限られず、アイドリングストップ機能の目的に合致する限りにおいて、種々の条件を付加するものであってもよく、上記条件の何れかを削除するものであってもよい。
【0047】
(データ異常判定制御)
アイドリングストップ制御におけるエンジン停止制御やエンジン始動制御とは別に、これら制御を実行する際に利用する記憶部に記憶されているデータ異常を判定する制御、つまり、データ異常判定制御について図4に基づいて説明する。なお、データ異常判定制御は、制御部20が所定の周期で実行し、車両システムの終了とともに終了する。
【0048】
(第1異常判定・SRAM異常判定制御、バッテリクリア判定制御)
ステップS200において、アイドリングストップ制御装置1における制御部20のSRAM制御部24は、SRAM異常か否かを判定する。または、バッテリ17が車両システムから外されたことにより、SRAM28への電力の供給が停止したか否か、つまり、バッテリクリアがされたか否かを判定する。換言すると、SRAM制御部24は、SRAM28に書き込まれているデータが電気的なノイズが影響して化けて異常になっていないか、或いは、SRAM28への電力の供給が停止して、SRAM28に書き込まれているデータが消去されていないかを判定する第1異常判定を行う。SRAM制御部24は、SRAM28に書き込まれているデータが異常であると判定した場合、または、SRAM28に書き込まれているデータが消去されていると判定した場合は、ステップS201へ移行する。SRAM制御部24は、SRAM28に書き込まれているデータが異常であると判定しない場合、または、SRAM28に書き込まれているデータが消去されていると判定しない場合、すなわち、正常な場合は、リターンへ移行する。
【0049】
(第2異常判定・多数決制御)
ステップS201において、アイドリングストップ制御装置1におけるEEPROM制御部23は、データをEEPROM27へ書き込む際にそのデータと同一のデータを複数書き込んでおり、その書き込んだEEPROM27の同じアドレスから複数のデータを読み出して、読み出したその複数のデータが相互に一致するか否かを判定する。EEPROM制御部23は、それら全てのデータが一致する場合、または、それらデータのうち、一部が一致する場合で一致するデータ数が一致しないデータ数よりも多い場合は、EEPROM27に書き込まれているデータが異常ではないと判定する。異常であると判定しない場合は、ステップS202へ移行する。
【0050】
EEPROM制御部23は、それら全てのデータが一致しない場合、または、それらデータのうち、一部が一致する場合で一致するデータ数が一致しないデータ数よりも少ない場合は、EEPROM27に書き込まれているデータが異常であると判定する。異常であると判定した場合は、ステップS205へ移行する。
【0051】
このような第2異常判定である多数決制御を、EEPROM27に書き込まれているデータに対し行えば、EEPROM27に書き込まれているデータが電気的なノイズが影響して化けることがあっても、書き込まれた複数のデータうち一部のデータのみが化けてしまうことが多いため、化けていない正常なデータを読み出すことができるとともに、複数のデータのうち多数が異なるデータに化けてしまった際にデータ異常を判定することができる。
【0052】
(第3異常判定・上下限ガード制御)
ステップS202において、アイドリングストップ制御装置1におけるEEPROM制御部23は、EEPROM27へ書き込んだデータを2進数として加算した値が、所定の上限値以下であり、かつ、所定の下限値以上であるか(予定された値の範囲内であるか)否かを判定する。つまり、EEPROM27へ書き込んだデータが予定された容量であるか否かを判定する。EEPROM制御部23は、EEPROM27へ書き込んだデータが予定された容量であると判定しない場合、ステップS203へ移行する。EEPROM27へ書き込んだデータが予定された容量であると判定した場合、ステップS206へ移行する。
【0053】
ステップS206において、EEPROM制御部23は、EEPROM27のバックアップデータであるスタータモータ駆動回数を読み出してSRAM28へ書き込む。次に、リターンへ移行する。
【0054】
このような第3異常判定である上下限ガード制御を、EEPROM27に書き込まれているデータに対し行えば、EEPROM27に書き込まれているデータが電気的なノイズの影響により同一の複数のデータが同じように化けて第2異常判定である多数決制御において異常判定されなかった場合で、かつ、ノイズの影響によりそのデータ容量よりも大きくなったり小さくなったりする場合に、データ異常を判定することができる。
【0055】
(第4異常判定・ベリファイ制御)
ステップ203において、アイドリングストップ制御装置1における制御部20のSRAM制御部24は、ROM25から所定値(例えば、スタータモータ駆動回数であればテストデータとしての一定の値を、制御における学習値であればその初期値)を読み出して、読み出した所定値をSRAM28へ書き込む。また、EEPROM制御部23は、ROM25から所定値を読み出して、読み出した所定値をEEPROM27へ書き込む。次にステップS204へ移行する。
【0056】
ステップS204において、EEPROM制御部23は、EEPROM23へ所定値を書き込んだ同一のアドレスからデータを読み出して、書き込んだ所定値と読み出したデータが一致するか否かを判定する。一致すると判定しない場合は、ステップS205へ移行する。一致すると判定した場合は、リターンへ移行する。
【0057】
第2異常判定(ステップS201)や第3異常判定(ステップS202)において判定するデータは、その書き込みからその読み出しまでの間に相当の時間が経過している場合があり、その時間において電気的なノイズが影響してデータが化けたデータ異常の可能性があって、EEPROM27異常であるのか、単にデータが化けたデータ異常であるのかは特定できなかった。そこで、このような第4異常判定であるベリファイ制御を、EEPROM27に対して行えば、判定するデータの書き込みから読み出しまでの時間はかなり短いため、EEPROM27の故障を特定できる。
【0058】
(フェールセーフ制御)
ステップ205において、アイドリングストップ制御装置22は、EEPROM27が故障しているため、アイドリングストップ制御を禁止する。
【0059】
アイドリングストップ制御において、SRAM28のスタータモータ駆動回数が所定回以上の場合にアイドリングストップ制御を禁止して、スタータモータ10の劣化を判断するとともに、スタータモータ10の交換をユーザへ促して運転における不測の事態を回避しているが、このようなフェールセーフ制御により、SRAM28に書き込まれている学習値やスタータモータ駆動回数データのデータ異常が発生している場合と、EEPROM異常によるEEPROM27にバックアップデータとして書き込まれている学習値やスタータモータ駆動回数データのデータ異常が発生している場合に、その運転における不測の事態を回避できないという虞がなくなる。
【0060】
<変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。
【0061】
また、上記実施の形態では、プログラムに従った制御部であるマイコンの演算処理によってソフトウェア的に各種の機能が実現されると説明したが、これら機能のうちの一部は電気的なハードウェア回路により実現されても良い。また逆に、ハードウェア回路によって実現されるとした機能のうちの一部は、ソフトウェア的に実現されても良い。
【0062】
更に、制御を説明するフローチャート図における各処理は、便宜上、一の系列で示しているが、細分化された各処理を各制御部がマルチタスク制御機能により並列に処理するものであっても良い。
【符号の説明】
【0063】
1 アイドリングストップ制御装置
10 スタータモータ
20 制御部
22 アイドリングストップ制御部
23 EEPROM制御部
24 SRAM制御部
27 EEPROM
28 SRAM
【特許請求の範囲】
【請求項1】
制御対象を制御する制御装置であって、
電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部と、
電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部と、
制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、前記第1記憶部に書き込まれているデータを読み出す制御対象制御手段と、
前記第1記憶部に書き込まれるデータを前記第2記憶部へ書き込む書込制御手段と、
前記第1記憶部の異常を判定する第1異常判定手段と、
複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定手段と、
前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定手段と、
前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定手段と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段とによる異常判定を行って、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御手段と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段の異常判定を行って、異常と判定した場合は、更に、第4異常判定手段による異常判定を行って、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御手段と、
を備えることを特徴とする制御装置。
【請求項2】
請求項1に記載の制御装置において、
制御装置は、エンジンを制御してアイドリングストップ制御を実行する制御装置であり、
前記第2セーフ制御手段は、アイドリングストップ制御を禁止することを特徴とする制御装置。
【請求項3】
請求項2に記載の制御装置において、
前記書込制御手段は、前記第1記憶部に書き込まれるスタータモータの駆動回数のデータを前記第2記憶部へ書き込むことを特徴とする制御装置。
【請求項4】
制御対象を制御する制御方法であって、
制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、電源から導かれる電力の供給を受けることによってデータを保持するとともに読み書き可能な第1記憶部に書き込まれているデータを読み出す制御対象制御工程と、
前記第1記憶部に書き込まれるデータを、電力の供給を受けなくてもデータを保持するとともに読み書き可能な第2記憶部へ書き込む書込制御工程と、
前記第1記憶部の異常を判定する第1異常判定工程と、
複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定工程と、
前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定工程と、
前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定工程と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程とによる異常判定を実行して、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御工程と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程の異常判定を実行して、異常と判定した場合は、更に、第4異常判定工程による異常判定を実行して、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御工程と、
を備えることを特徴とする制御方法。
【請求項1】
制御対象を制御する制御装置であって、
電源から導かれる電力の供給を常に受けることによってデータを保持する、読み書き可能な第1記憶部と、
電力の供給を受けなくてもデータを保持する、読み書き可能な第2記憶部と、
制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、前記第1記憶部に書き込まれているデータを読み出す制御対象制御手段と、
前記第1記憶部に書き込まれるデータを前記第2記憶部へ書き込む書込制御手段と、
前記第1記憶部の異常を判定する第1異常判定手段と、
複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定手段と、
前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定手段と、
前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定手段と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段とによる異常判定を行って、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御手段と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定手段と前記第3異常判定手段の異常判定を行って、異常と判定した場合は、更に、第4異常判定手段による異常判定を行って、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御手段と、
を備えることを特徴とする制御装置。
【請求項2】
請求項1に記載の制御装置において、
制御装置は、エンジンを制御してアイドリングストップ制御を実行する制御装置であり、
前記第2セーフ制御手段は、アイドリングストップ制御を禁止することを特徴とする制御装置。
【請求項3】
請求項2に記載の制御装置において、
前記書込制御手段は、前記第1記憶部に書き込まれるスタータモータの駆動回数のデータを前記第2記憶部へ書き込むことを特徴とする制御装置。
【請求項4】
制御対象を制御する制御方法であって、
制御をする際に、制御に関するデータを前記第1記憶部へ書き込むとともに、電源から導かれる電力の供給を受けることによってデータを保持するとともに読み書き可能な第1記憶部に書き込まれているデータを読み出す制御対象制御工程と、
前記第1記憶部に書き込まれるデータを、電力の供給を受けなくてもデータを保持するとともに読み書き可能な第2記憶部へ書き込む書込制御工程と、
前記第1記憶部の異常を判定する第1異常判定工程と、
複数の同一データが書き込まれた前記第2記憶部におけるデータが不一致の場合に前記第2記憶部が異常とする第2異常判定工程と、
前記第2記憶部から読み出したデータが所定の容量ではない場合に前記第2記憶部が異常とする第3異常判定工程と、
前記第2記憶部へ書き込んだ所定のデータと読み出した該所定のデータとが一致しない場合に前記第2記憶部が異常とする第4異常判定工程と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程とによる異常判定を実行して、異常と判定しない場合は、前記第2記憶部のデータを前記第1記憶部へ書き込む第1セーフ制御工程と、
前記第1記憶部の異常を判定した場合に、前記第2異常判定工程と前記第3異常判定工程の異常判定を実行して、異常と判定した場合は、更に、第4異常判定工程による異常判定を実行して、異常を判定した場合は、制御対象を制御することを禁止する第2セーフ制御工程と、
を備えることを特徴とする制御方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−122501(P2011−122501A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−280059(P2009−280059)
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]