
制御装置及びコンピュータプログラム
【課題】 撮像装置を遠隔制御する制御装置であって、撮影時に画像に別々に記録された複数のゴミ補正データを利用して、画像ファイルのみから複数の組み合わせにより、ゴミ除去の効果を確認できるようにすることにより、ゴミ除去にかかる負荷を低減することを課題とする。
【解決手段】 第1のゴミ位置情報として、白紙を撮影することで検出されたゴミ補正データを保持する撮像装置において、撮影画像撮影時に第1のゴミ補正データを情報として付加するカメラにおいて、第2のゴミ補正データとして、PCにて第1のゴミ補正データにより画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、第2のゴミ補正データをカメラに入力すると、第1と第2のゴミ補正データを画像に付加する。
【解決手段】 第1のゴミ位置情報として、白紙を撮影することで検出されたゴミ補正データを保持する撮像装置において、撮影画像撮影時に第1のゴミ補正データを情報として付加するカメラにおいて、第2のゴミ補正データとして、PCにて第1のゴミ補正データにより画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、第2のゴミ補正データをカメラに入力すると、第1と第2のゴミ補正データを画像に付加する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、CCDやCMOSセンサ等の撮像素子を用いた撮像装置における、光学ローパスフィルター等の表面に付着した異物による画質劣化を抑制する技術に関する。
【背景技術】
【0002】
近年、デジタルカメラやデジタルビデオカメラなどのように、CCD等の撮像素子を用いて画像信号を生成し、それをデータとして記録する撮像装置が数多く出回るようになってきている。デジタルカメラでは、従来記録媒体として使用していた感光フィルムが不要になり、これに代わって半導体メモリカードやハードディスク装置等のデータ記録媒体にデータ化された画像を記録する。これらのデータ記録媒体はフィルムと違って何度でも書き込み、消去が可能であるので、消耗品にかかる経費が少なくて済み、大変便利である。
【0003】
通常、デジタルカメラには撮像画像を随時表示可能なLCD(液晶表示器)モニタ装置と、着脱可能な大容量記憶装置が搭載されている。
【0004】
これら二つの装置を備えたデジタルカメラを利用すると、従来消耗品として使用してきた記録媒体であるフィルムが不要になるばかりでなく、撮像した画像をLCDモニタ装置に表示してその場で直ちに確認できる。したがって、満足の得られない画像データはその場で消去したり、必要に応じて再撮影したりすることが可能となり、フィルムを用いる銀塩カメラと比較すると、写真撮影の効率が飛躍的に高まったと言える。
【0005】
このような利便性と撮像素子の多画素化などの技術革新により、デジタルカメラの利用範囲は拡大しており、近年では一眼レフ方式などレンズ交換が可能なデジタルカメラも多くなってきている。
【0006】
しかしながら、デジタルカメラでは、撮像素子前方の撮影光軸上に配置された撮像素子保護ガラス、光学フィルタ等の表面上や光学系(以下、まとめて撮像素子光学系部品)にゴミ、ほこりなどの異物(以下、単にゴミ)が付着する場合がある。このように撮像素子光学系部品にゴミが付着すると、そのゴミによって光が遮られ、その部分が撮影されないなど、撮影した画像の品質が低下するという問題があった。
【0007】
したがって、撮影者は撮像素子光学系部品へのゴミの付着に常時気を使わねばならず、ゴミのチェックや清掃に多くの労力を費やしていた。特に撮像素子は、カメラ内部の比較的奥まったところに配置されているため、清掃やゴミの確認は容易ではない。
【0008】
さらにレンズ交換式のデジタルカメラでは、レンズ着脱によりゴミの侵入が容易であるばかりでなく、レンズ交換式デジタルカメラの多くは撮像素子の直前にフォーカルプレーンシャッターを配置しており、撮像素子光学系部品上にゴミが付着しやすい。
【0009】
このようなゴミは、通常撮像素子の表面にではなく、保護用のガラスや光学フィルタ上に付着しているため、撮影レンズの絞り値や撮影レンズの瞳から撮像面までの距離により結像状態が異なる。即ち、絞りが開放値に近いとぼやけてしまい、小さいゴミが付着していたとしてもほとんど影響が無くなるが、逆に絞り値が大きくなるとはっきり結像し画像に影響を与えてしまう。
【0010】
そこで、レンズの絞りを絞った状態で白い壁などを撮影し、撮像素子上のゴミだけが写った画像を予め用意して通常撮影画像と組み合わせて使用することで、ゴミを目立たなくする方法が知られている(特許文献1参照)。しかし、この方法では、ゴミ検出用に撮影した画像と、それに関連付ける本撮影画像群との対応付けを常に意識しなくてはならず、煩わしい。
【0011】
そこで、白い壁などを撮影してゴミの位置を取得した後これをデジタルカメラ上で保持しておき、通常撮影時の画像データにゴミの位置や大きさのリストを添付することが考えられる。例えば別途用意された画像処理装置を用い、添付されたゴミの位置から撮影データ上のゴミ位置を解析し、解析された領域を周囲の画素で補間処理することにより目立たなくすることができる。
【0012】
ただし、このような処理によって、画像上に写り込んだすべてのゴミを目立たなくすることは困難である。なぜなら、デジタルカメラで白い壁などを撮影してゴミの位置を取得する際に、周辺減光の影響などによりゴミの位置の取得に失敗する場合があるからである。この場合には、ゴミの位置や大きさのリストにそのゴミが登録されないため、前述の画像処理装置を用いた解析、補間処理では、そのゴミを目立たなくするということはできない。
【0013】
このように、ゴミのリストに登録されなかったゴミは、前述したようなゴミのリストを利用した画像処理では目立たなくすることはできない。そこで、そのようなゴミはユーザが自らの手によって撮影画像上のゴミの位置を指定し、リペア処理等を施すことによって目立たなく方法が知られている(特許文献2参照)。これによれば、ゴミの位置や大きさのリストをファイル情報、あるいはカメラ内の情報として追加登録できる仕組みとなっている。しかしながら、撮影画像が複数枚存在するような場合には、ユーザはすべての画像に対して、リペア処理を行うために、リストを用いることになるため、常にファイルを適用する必要があり、ユーザ負荷が大きくなってしまうという問題がある。さらに、カメラ内の情報としてリストを保持していた場合にも、同様の問題が発生する。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2004−222231号公報
【特許文献2】特開2008−244867号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
本発明は、前述した課題に鑑みてなされたものであり、その目的は、撮像装置を遠隔制御する制御装置において、撮像素子の前方に配置された保護ガラス、フィルタ等にゴミが付着した場合でも、撮影画像への影響を効率よく抑制できるようにすることである。
【課題を解決するための手段】
【0016】
上記のような課題を解決するために、本発明に係る制御装置は、第1のゴミ位置情報として、白紙を撮影することで検出されたゴミ補正データを保持する撮像装置において、撮影画像撮影時に第1のゴミ補正データを情報として付加するカメラにおいて、第2のゴミ補正データとして、PCにて第1のゴミ補正データにより画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、第2のゴミ補正データをカメラに入力すると、第1と第2のゴミ補正データを画像に付加することを特徴とする。
【発明の効果】
【0017】
本発明によれば、撮像素子の前方に配置された保護ガラス、フィルタ等にゴミが付着した場合でも、撮影画像への影響を効率よく抑制することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態1から3に係る制御システムの一例を示す図である。
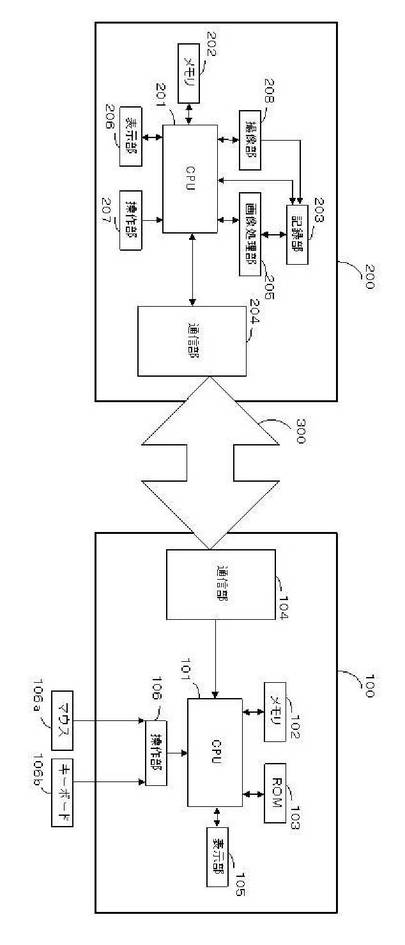
【図2】本発明の実施形態1から3に係る制御システムの概略構成の一例を示すブロック図である。
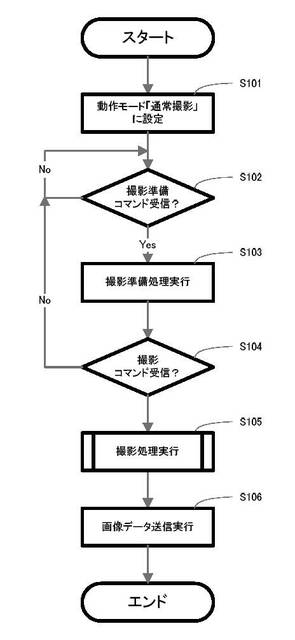
【図3(a)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図3(b)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図3(c)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図4(a)】本発明の実施形態1から3に係るゴミ補正データ(400)、および追加ゴミ補正データ(400)の一例を示す図である。
【図4(b)】本発明の実施形態1から3に係るゴミ補正データ(410)、および追加ゴミ補正データ(410)の一例を示す図である。
【図5(a)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図5(b)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図5(c)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図6(a)】本発明の実施形態1に係るカメラコントロール画面(500)の一例を示す図である。
【図6(b)】本発明の実施形態3に係るカメラコントロール画面(500)の一例を示す図である。
【図7】本発明の実施形態1から3に係る送信コマンド(700)の一例を示す図である。
【図8】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【図9(a)】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【図9(b)】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の好適な実施形態について、図面を参照して詳細に説明する。
【0020】
[実施例1]
図1は、本発明の実施形態1に係る遠隔制御システムの概略構成の一例を示す図である。図2は、本発明の実施形態1に係る遠隔制御システムの一例を示すブロック図である。
【0021】
実施形態1に係る通信システムは、図1及び図2に示すように、制御装置(100)、インターフェース(300)、撮像装置(200)を有する。制御装置(100)と撮像装置(200)は、インターフェース(300)を介して接続されている。インターフェース(300)の一例として、USB(Universal Serial Bus)接続ケーブルを用いる。以下では、接続ケーブルを「USBケーブル」として説明する。
【0022】
次に、PC(100)の構成の一例を説明する。
【0023】
PC(100)は、図2に示すように、CPU(Central Processing Unit)(101)、メモリ(102)、通信部(104)、表示部(105)、操作部(106)を有する。
【0024】
表示部(105)は、液晶ディスプレイ等の表示器により構成される。表示部(105)は、メモリ(102)及び通信部(104)の少なくとも一つから供給された映像データを表示することができる。また、表示部(105)は、メモリ(102)に記憶されているグラフィカルユーザインターフェースであるメニュー画面を表示することもできる。メニュー画面は、PC(100)を制御するためのPC制御画面、PC(100)の設定を変更するためのPC設定画面、または、撮像装置(200)を制御するためのカメラコントロール画面(500)等を含む。
【0025】
なお、これらのメニュー画面が表示部(105)に表示されている場合、CPU(201)はマウスカーソル(矢印の形状のアイコン)(600)をメニュー画面に重畳して表示する。
【0026】
また、表示部(105)は、CPU(101)から供給されたカメラコントロール画面(500)の所定の領域に、通信部(104)から供給された映像データを表示する。カメラコントロール画面(500)の説明は後述する。
【0027】
操作部(106)は、PC(100)を操作するためのユーザインターフェースである。また、操作部(106)は、PC(100)を操作するための操作手段として、マウス(106a)やタブレット、トラックボール等のポインティングデバイスやキーボード(106b)を有する。これらのポインティングデバイスをユーザが操作することによって、メニュー画面に重畳されたマウスカーソル(600)をメニュー画面上で操作を行うことができる。
【0028】
メニュー画面上において、ポインティングデバイスの位置情報に応じてマウスカーソル(600)はメニュー画面上を移動し、ポインティングデバイスが押下されると、マウスカーソル(600)は検出された領域に応じて処理を行う。
【0029】
次に撮像装置(200)の構成の一例を説明する。
【0030】
撮像装置(200)は、図2に示すように、CPU(201)、メモリ(202)、記録部(203)、通信部(204)、画像処理部(205)、表示部(206)、操作部(207)、撮像部(208)を有する。
【0031】
撮像装置(200)は、撮影モード、再生モード、ゴミ検出モード、ゴミ補正データ登録モード等の動作モードを有する。撮像装置(200)の動作モードが撮影モードである場合、撮像装置(200)は、被写体の撮影が可能になり、撮影された映像(動画、静止画のいずれでもよい)を記録媒体に記録することができる。撮像装置(200)の動作モードが再生モードである場合、ユーザによって選択された映像(動画、静止画のいずれでもよい)を記録媒体から再生することができる。撮像装置(200)の動作モードがゴミ検出モードである場合、撮像装置(200)は、静止画を撮影し、画像からゴミ補正データ(400)を検出し、メモリ(202)にゴミ補正データ(400)を記録する。撮像装置(200)の動作モードがゴミ補正データ登録モードである場合、撮像装置(200)は、USBケーブル(300)を介してPC(100)から転送されたゴミ補正データ(400)を取得してメモリ(202)に追加ゴミ補正データ(400)を記録する。
【0032】
ゴミ補正データ(400)、および追加ゴミ補正データ(400)の説明は、図4(a)、図4(b)を用いて後に説明する。
【0033】
メモリ(202)に記憶される情報には、撮像装置(200)を制御するコンピュータプログラム、表示部(206)に表示される所定の画像データやアイコン、ゴミ補正データ(400)、追加ゴミ補正データ(400)等がある。
【0034】
撮像装置(200)の動作モードが撮影モードである場合、撮像部(208)は、被写体を撮影し、当該被写体の光学像から映像データを生成する。この際、メモリ(202)にゴミ補正データ(400)、追加ゴミ補正データ(400)が記録されていれば、映像データのMakerNote内にゴミ補正データ(400)、追加ゴミ補正データ(400)を記録する。撮像部(208)によって生成された映像データは、通信部(204)、画像処理部(205)及び表示部(206)に供給される。不図示のマイクロフォン部が生成した音声データも、記録部(203)及び通信部(204)に供給される。
【0035】
さらに、撮像装置(200)の動作モードが撮影モードである場合、記録部(203)は、画像処理部(205)でさまざまな画像処理が行なわれた映像データと、不図示のマイクロフォン部が生成した音声データとを記録媒体に記録することができる。この際、メモリ(202)にゴミ補正データ(400)、追加ゴミ補正データ(400)が記録されていれば、映像データのMakerNote内にゴミ補正データ(400)、追加ゴミ補正データ(400)を記録する。
【0036】
また、撮像装置(200)の動作モードが再生モードである場合、記録部(203)は、ユーザによって選択された映像データ及び音声データを記録媒体から再生することができる。記録媒体から再生された映像データは、表示部(206)及び通信部(204)に供給される。一方、記録媒体から再生された音声データは、通信部(204)及び不図示のスピーカ部に供給される。
【0037】
表示部(206)は、液晶ディスプレイ等により構成される。撮像装置(200)の動作モードが撮影モードである場合、表示部(206)は、撮像部(208)が生成した映像データを表示する。撮像装置(200)の動作モードが再生モードである場合、表示部(206)は、記録部(203)が記録媒体から再生した映像データを表示する。
【0038】
操作部(207)は、撮像装置(200)を操作するためのユーザインターフェースであり、撮像装置(200)を操作するための複数のボタンを有する。ユーザからの指示は、操作部(207)を介してCPU(201)に入力される。操作部(207)内の各ボタンは、スイッチ、タッチパネル等により構成される。
【0039】
操作部(207)は、シャッターボタン、電源ボタン、スタート/ストップボタン、モード変更ボタン、メニューボタン、十字ボタン、SETボタン等を有する。
【0040】
シャッターボタンは、シャッターボタンの半押しされた状態であるS1とシャッターボタンの全押しされた状態であるS2の2つの状態を持つ。撮像装置(200)の動作モードが撮影モードの場合、シャッターボタンが押下されたときにシャッターボタンがS2の状態では、CPU(201)は撮像部(208)に一連の撮影処理の動作開始を指示する。シャッターボタンがS2の状態のときに撮像部(208)が行う撮影処理については、後述する。
【0041】
スタート/ストップボタンは、撮像部(208)によって生成された映像データ等の記録媒体への記録の開始又は一時停止をCPU(201)に指示するボタンである。モード変更ボタンは、撮像装置(200)の動作モードを撮影モード、再生モード、ゴミ検出モード、ゴミ補正データ登録モード等のいずれかに変更することをCPU(201)に指示するボタンである。
【0042】
メニューボタンは、撮像装置(200)のメニュー画面の表示又は非表示をCPU(201)に指示するボタンである。撮像装置(200)のメニュー画面は、撮像装置(200)を制御するためのメニュー画面、撮像装置(200)の設定を変更するためのメニュー画面を含む。これらのメニュー画面は、メモリ(202)に記憶されている。
【0043】
また、操作部(207)は、再生ボタン、停止ボタン、一時停止ボタン、早送りボタン、巻き戻しボタン等を有する。これらのボタンは、記録媒体に記録された映像データの再生(play)、停止(Stop)、一時停止(pauSe)、早送り(fast forward)及び巻き戻し(rewind)の実行をCPU(201)に指示するボタンである。
【0044】
次に、撮影処理について説明を行う。
【0045】
撮影処理とは撮像装置(200)のシャッターボタンが全押しされてS2の状態になった場合、通常カメラで行われる処理のことである。
【0046】
この処理では、撮像素子から出力されたアナログデータがA/D変換部でデジタルデータに変換された後、画像処理部(205)で圧縮を行い、記録部(203)に画像データを書き込む。この際、通常撮影時には、撮影時のカメラ設定値等と共に図5に示したゴミ補正データ(400)、追加ゴミ補正データ(400)を画像データに関連付けて記録部(203)に画像データを書き込む。ゴミ検出時には、撮影によって得られた画像データから図5に示したゴミを検出し、ゴミ補正データ(400)としてメモリ(202)へ書き込む。
【0047】
次に、図1、図2及び図3(a)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われる撮影処理の一例を示すフローチャートである。
【0048】
図3のフローチャートが示す処理は、PC(100)と撮像装置(200)とがUSBケーブル(300)を介して接続され、PC(100)及び撮像装置(200)が電源オン状態であるときに実行される処理である。なお、図3のフローチャートに示す処理は、CPU(201)がメモリ(202)に記憶されているコンピュータプログラムを実行することによって制御される。
【0049】
ステップS101において、撮像装置(200)の動作モードが操作部(207)で撮影モードに設定された場合、CPU(201)は通信部(204)に撮影モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS101からステップS102に進む。
【0050】
ステップS102において、CPU(201)は通信部(204)が撮影準備コマンドを受信したか否かを判定する。CPU(201)が撮影準備コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影準備フラグを設定する。この場合、本フローチャートはステップS102からステップS103に進む。CPU(201)が撮影準備コマンドを受信しなかったと判定した場合は、本フローチャートはステップS102からステップS102に戻る。
【0051】
ステップS103において、CPU(201)は撮影準備処理を撮像部(208)に実行させるように指示を出す。撮影準備処理が行なわれた場合、本フローチャートはステップS103からステップS104に進む。
【0052】
ステップS104において、CPU(201)は通信部(204)がPC(100)からの撮影コマンドを受信したか否かを判定する。CPU(201)は通信部(204)が撮影コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影フラグをセットする。この場合、本フローチャートはステップS104からステップS105に進む。CPU(201)は通信部(204)が撮影コマンドを受信しなかったと判定した場合は、CPU(201)はメモリ(202)の撮影準備フラグをリセットする。この場合、本フローチャートはステップS104からステップS102に戻る。
【0053】
ステップS105において、CPU(201)は撮影処理を撮像部(208)に実行させるように指示を出す。ここで、ゴミ補正データ(400)、もしくは追加ゴミ補正データ(400)が、メモリ(202)内に記録されている場合には、図5に示したゴミ補正データ(400)、追加ゴミ補正データ(400)を画像データに関連付けて記録部(203)に画像データを書き込む。
撮影処理が行なわれた場合、CPU(201)はメモリ(202)の撮影準備フラグ及び撮影フラグをリセットする。この場合、本フローチャートはステップS105からステップS106に進む。
【0054】
ステップS106において、撮影処理が完了した後、CPU(201)は通信部(204)に画像データの送信準備が完了したことを示す準備完了信号を生成させ、PC(100)に送信するように指示を出す。PC(100)に準備完了信号が送信された後、CPU(201)は記録部(203)から画像データを読み出して、通信部に読み出した画像データをPCに送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0055】
次に、図1、図2及び図3(b)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われるゴミ検出処理の一例を示すフローチャートである。
【0056】
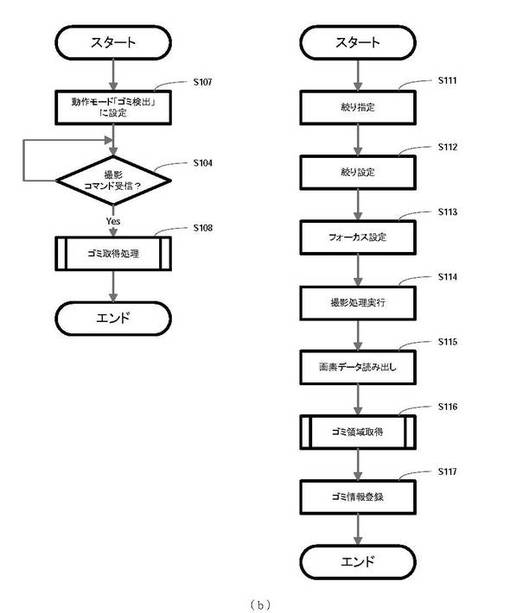
ステップS107において、撮像装置(200)の動作モードが操作部(207)でゴミ検出モードに設定された場合、CPU(201)は通信部(204)にゴミ検出モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS107からステップS104に進む。
【0057】
ステップS104において、CPU(201)は通信部(204)がPC(100)からの撮影コマンドを受信したか否かを判定する。CPU(201)は通信部(204)が撮影コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影フラグをセットする。この場合、本フローチャートはステップS104からステップS108に進む。
【0058】
ステップS108において、ゴミ取得処理が完了した後、CPU(201)は通信部(204)にゴミ取得処理が完了したことを示すゴミ取得完了信号を生成させ、PC(100)に送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0059】
次に、ステップS108で行われるゴミ取得処理について説明する。このゴミ検出処理は、画像に写り込んだ、不図示の撮像素子の前方に配置された不図示の光学部材の表面に付着したゴミの影の位置、大きさ等を検出する処理である。ゴミ検出処理は、ゴミ検出用画像を撮像することにより行われる。ゴミ検出処理を行う場合、面光源装置の出射面や白い壁などの均一な色を持つ面に不図示のレンズの撮影光軸を向けてカメラを設置し、ゴミ検出の準備を行う。本実施形態においてゴミ検出用画像は、均一な色を有する画像である。準備が終了した後、例えば操作部(207)からゴミ検出処理の開始が指示されると、CPU201は、まず絞りの設定を行う。撮像素子近傍のゴミはレンズの絞り値によって結像状態が変わり、レンズの瞳位置によって位置が変化する。したがって、ゴミ補正データ(400)にはゴミの位置や大きさに加え、検出時の絞り値とレンズの瞳位置を保持する必要がある。ここで瞳位置とは、射出瞳の撮像面(焦点面)からの距離をいう。ただし、ゴミ補正データ(400)を作成する段階で、異なるレンズを用いたとしても常に同じ絞り値を使うことを予め決めておけば、必ずしもゴミ補正データ(400)内に絞り値を保持する必要はない。
【0060】
ステップS111において、不図示の撮影レンズの絞り値が指定される。ここでは、例えばF22を指定する。この場合、本フローチャートはステップS111からステップS112に進む。
【0061】
ステップS112において、CPU201は不図示のレンズ制御回路に対し、不図示の撮影レンズの絞り羽根制御を行わせ、ステップS111で指定された絞り値に絞りを設定する。この場合、本フローチャートはステップS112からステップS113に進む。
【0062】
ステップS113において、フォーカス位置を無限遠に設定する。この場合、本フローチャートはステップS113からステップS114に進む。
【0063】
ステップS114において、撮影レンズの絞り値とフォーカス位置が設定されると、ゴミ検出モードでの撮影を実行する。撮影された画像データは、メモリ202に格納される。この場合、本フローチャートはステップS114からステップS115に進む。
【0064】
ステップS115において、撮影が終了すると、画像処理部207にメモリ202に記憶されている撮影画像の各画素に対応するデータを呼び出す。この場合、本フローチャートはステップS115からステップS116に進む。
【0065】
ステップS116において、画像処理部205は、ゴミ領域取得処理を行い、ゴミ領域(ゴミの影)が存在する画素の位置と大きさを取得する。この場合、本フローチャートはステップS116からステップS117に進む。ゴミ領域取得処理は、文献2の(ゴミ取得ルーチン)の説明と同等である。
【0066】
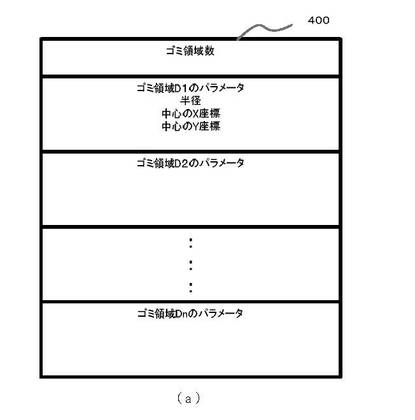
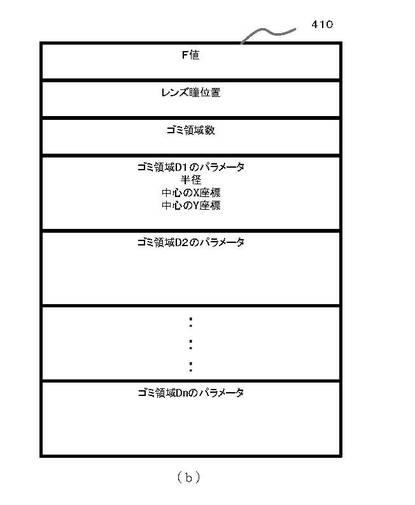
ステップS117において、ステップS116で取得したゴミ領域が存在する画素の位置と大きさを、メモリ202に登録する。ここで、ステップS117において、予め画素不良位置メモリに記録されている製造時からの不良画素の位置と、読み出した画素データの位置を比べて画素不良であるかどうかを確認する。そして、画素不良によるものでは無いと判断された領域のみ、メモリ202に位置を登録しても良い。メモリ202に格納されるゴミ補正データ(400)のデータ形式例を図4(a)に示す。図4(a)に示した通り、ゴミ補正データ(400)には、ゴミ検出用画像撮影時の、ゴミの位置、大きさの情報が格納される。このゴミ補正データ(400)は、通常撮影時に画像データの撮影時情報と共に画像に付加し、ゴミ除去処理、補間処理で利用される。ゴミ除去処理、文献2の(ゴミ除去処理)の説明と同等である。補間処理は、文献2の(補間ルーチン)の説明と同等である。具体的には、記憶領域に検出したゴミ領域の数(整数値)を格納し、これに続き、個々の具体的なゴミ領域のパラメータを、ゴミ領域の数だけ繰返して格納する。ゴミ領域のパラメータは、ゴミ領域の半径(例えば2バイト)、有効画像領域における中心のx座標(例えば2バイト)、おなじく中心のy座標(例えば2バイト)の3つの数値のセットである。メモリ202の大きさ等によりゴミ補正データサイズに制限がある場合、ゴミ領域の先頭から優先してデータを格納する。これは、ステップS117のゴミ領域取得ルーチン内では、ゴミ領域を、目立つゴミの順にソートするからである。ここで、ゴミ補正データ(400)のデータ形式は、図4(b)のように、ゴミ補正データ(400)には、検出画像撮影時のレンズ情報として、検出画像撮影時における実際の絞り値(F値)と、そのときのレンズ瞳位置を格納するようにしても良い。
【0067】
次に、図1、図2及び図3(c)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われるゴミ補正データ登録処理の一例を示すフローチャートである。
【0068】
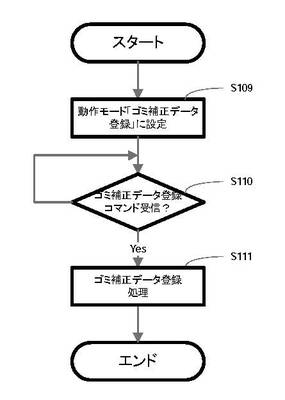
ステップS109において、撮像装置(200)の動作モードが操作部(207)でゴミ補正データ登録モードに設定された場合、CPU(201)は通信部(204)にゴミ補正データ登録モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS109からステップS110に進む。
【0069】
ステップS110において、CPU(201)は通信部(204)がPC(100)からのゴミ補正データ登録コマンドを受信したか否かを判定する。CPU(201)は通信部(204)がゴミ補正データ登録コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)にゴミ補正データ登録フラグをセットする。この場合、本フローチャートはステップS110からステップS111に進む。
【0070】
ステップS111において、追加ゴミ補正データ(400)の登録処理が完了した後、CPU(201)は通信部(204)に追加ゴミ補正データ(400)の登録処理が完了したことを示すゴミ補正データ(400)の登録完了信号を生成させ、PC(100)に送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0071】
次に、図1、図2及び図5(a)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(a)は実施形態1に係るPC(100)で行われる撮影処理の一例を示すフローチャートである。図5(a)のフローチャートが示す処理は、PC(100)と撮像装置(200)とがUSBケーブル(300)を介して接続され、PC(100)及び撮像装置(200)が電源オン状態であるときに実行される処理である。なお、図5(a)のフローチャートに示す処理は、CPU(101)がメモリ(102)に記憶されているコンピュータプログラムを実行することによって制御される。
【0072】
通信部(104)が撮像装置(200)から撮影モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「撮影モード」に設定する。
【0073】
その後、CPU(101)はメモリ(102)からカメラコントロール画面(500)を読み出して、表示部(105)に表示させる。
【0074】
同様にして、通信部(104)が撮像装置(200)からゴミ検出モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「ゴミ検出モード」に設定する。
【0075】
同様にして、通信部(104)が撮像装置(200)からゴミ補正データ登録モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「ゴミ補正データ登録モード」に設定する。
【0076】
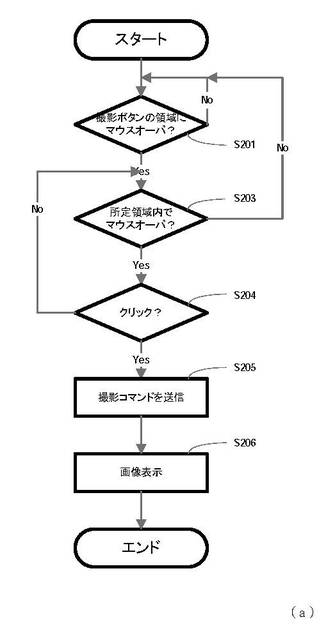
ステップS201において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS201からステップS203に進む。CPU(101)によって、マウスカーソル(600)が撮影ボタン(502)の領域上で検出されなかった場合、本フローチャートは、ステップS201からステップS201に戻る。
【0077】
ステップS203において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上マウスオーバされているか否かを判定する。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出したと判定した場合、本フローチャートは、ステップS203からステップS204に進む。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出しなかった場合、本フローチャートは、ステップS203からステップS201に戻る。
【0078】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS205に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS203に戻る。
【0079】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)に撮影コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは、ステップS205からステップS206に進む。ステップS205を実行後、図3(a)のフローチャートのステップS105により撮影処理を実行し、ステップS106により画像データ送信を実行し、PC(100)に画像データが送られてくる。
【0080】
ステップS206において、CPU(101)は撮像装置(200)から送られた画像データを、表示部(105)に表示させる。ここで、本フローチャートは終了する。
【0081】
このように、マウス(106a)を操作することによってマウスカーソル(600)が撮影ボタン(502)の領域上にマウスオーバするとPC(100)は撮像装置(200)に撮影準備処理を指示する。その後、マウスカーソル(600)がマウスオーバされた撮影ボタン(502)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)に撮影処理を指示する。さらに、撮像装置(200)からPC(100)へ送られた画像データを表示する。
【0082】
次に、図1、図2及び図5(b)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(b)は実施形態1に係るPC(100)で行われるゴミ検出処理の一例を示すフローチャートである。
【0083】
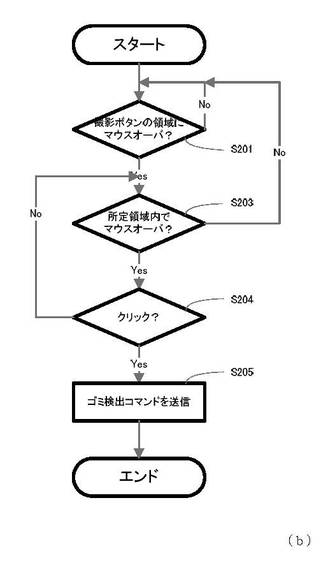
ステップS201において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS201からステップS203に進む。CPU(101)によって、マウスカーソル(600)が撮影ボタン(502)の領域上で検出されなかった場合、本フローチャートは、ステップS201からステップS201に戻る。
【0084】
ステップS203において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上マウスオーバされているか否かを判定する。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出したと判定した場合、本フローチャートは、ステップS203からステップS204に進む。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出しなかった場合、本フローチャートは、ステップS203からステップS201に戻る。
【0085】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS205に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS203に戻る。
【0086】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)にゴミ検出コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは終了する。
【0087】
ステップS205を実行後、図3(b)のフローチャートのステップS108によりゴミ検出処理を実行し、メモリ(202)にゴミ補正データ(400)を記録する。
【0088】
このように、マウスカーソル(600)がマウスオーバされた撮影ボタン(502)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)にゴミ検出処理を指示する。
【0089】
次に、図1、図2及び図5(c)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(c)は実施形態1に係るPC(100)で行われるゴミ補正データ登録処理の一例を示すフローチャートである。
【0090】
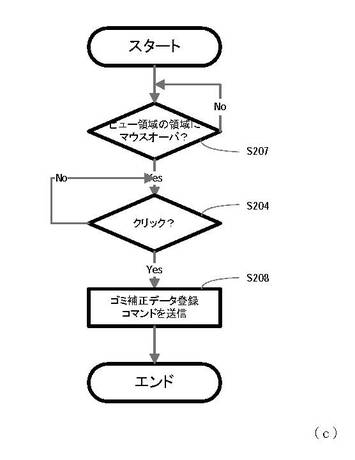
ここでは、ビュー領域(501)の領域上のにあるゴミを指定することで、カメラに追加ゴミ補正情報を登録する流れに限定して説明するが、具体的な操作の流れについては、後述する図6(a)に示すメニュー画面の一例であるカメラコントロール画面(500)の中で説明する。
【0091】
ステップS207において、CPU(101)は第1の判定手段としてマウスカーソル(600)がビュー領域(501)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS207からステップS204に進む。CPU(101)によって、マウスカーソル(600)がビュー領域(501)の領域上で検出されなかった場合、本フローチャートは、ステップS207からステップS207に戻る。
【0092】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS208に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS204に戻る。
【0093】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)にゴミ検出コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは終了する。
【0094】
ステップS205を実行後、図3(c)のフローチャートのステップS111によりゴミ補正データ登録処理を実行し、メモリ(202)に追加ゴミ補正データ(400)を記録する。
【0095】
このように、マウスカーソル(600)がマウスオーバされたビュー領域(501)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)にゴミ補正データ登録処理を指示する。
【0096】
なお、実施形態1では不図示のファインダーを通して撮影対象を確認して撮像装置(200)を遠隔制御する形だが、ライブビュー映像をPC(100)の表示部(105)に表示して、撮影対象を確認しながら、撮像装置(200)を遠隔制御する形でもよい。
【0097】
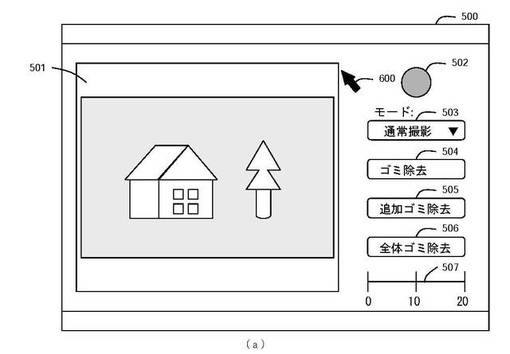
図6(a)は、メニュー画面の一例であるカメラコントロール画面(500)を表すもので、パソコンのOSで標準的に採用されているようなウィンドウシステム上に構成したものである。
【0098】
また、カメラコントロール画面(500)の機能として、画像編集機能を持ち、ゴミ除去処理、補間処理を実行可能である。ゴミ除去処理は、特許文献2の(ゴミ除去処理)の説明と同等である。補間処理は、特許文献2の(補間ルーチン)の説明と同等である。
【0099】
カメラコントロール画面(500)はカメラの遠隔制御するためのウィンドウで、映像データを表示するビュー領域(501)、撮影ボタン(502)、パラメータ領域(503)、ゴミ除去画像表示ボタン(504)、追加ゴミ除去画像表示ボタン(505)、全体ゴミ除去画像表示ボタン(506)、半径スライダ(507)等がある。
【0100】
ビュー領域(501)は、撮像装置(200)から通信部(104)で連続的に受信したライブビュー映像、もしくは撮影動作により受信した静止画像、もしくは再生動作により受信した動画像、および静止画像を表示している。
【0101】
撮影ボタン(502)は、シャッターボタンの半押しされた状態であるS1とシャッターボタンの全押しされた状態であるS2の2つの状態の撮影処理を行う。マウスカーソル(600)が撮影ボタン(502)上に移動した時、撮像装置(200)の動作モードが通常撮影モードの場合、PC(100)から撮像装置(200)に対して撮影準備処理の開始を指示する。マウスカーソル(600)が撮影ボタン(502)上にある状態でクリックした時、撮像装置(200)の動作モードが通常撮影モードの場合、PC(100)から撮像装置(200)に対して一連の撮影処理の動作開始を指示する。
【0102】
パラメータ領域(503)には、撮影モード等が表示されている。これらの値は、撮像装置(200)から受信する補助データに含まれている。なお、パラメータ領域(503)はこれ以外の補助データを表示するものであっても良い。また、操作によりパラメータ領域(503)上の値が変更された場合には、CPU(101)は通信部(104)に補助データ設定用のコマンド(700)を生成させ、撮像装置(200)に送信する。これにより、撮像装置のパラメータが変更される。
【0103】
CPU(101)は通信部(104)で撮像装置(200)から受信したデータをそれぞれビュー領域(501)、パラメータ領域(503)に表示するように制御している。
【0104】
ゴミ除去画像表示ボタン(504)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0105】
追加ゴミ除去画像表示ボタン(505)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けた追加ゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0106】
全体ゴミ除去画像表示ボタン(506)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)、および追加ゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0107】
半径スライダ(507)は、補間処理の適用範囲を指定するスライダである。スライダをマウスカーソル(600)により移動させることで半径を変更する。
【0108】
また、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指定された半径に基づき、表示画像の補間処理を行う。さらに、CPU(101)は通信部(104)に追加ゴミ補正データ登録用のコマンド(700)を生成させ、撮像装置(200)へ送信することにより、ゴミ領域の座標と半径をカメラ内の追加ゴミ補正データ(400)として登録する。
【0109】
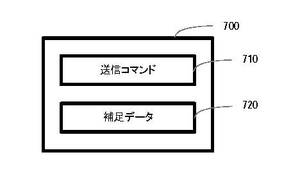
図7は、コマンド(700)について、図示している。
【0110】
コマンド(700)は、カメラを制御するための送信コマンド(710)、補足データ(720)で構成される。例えば、補助データを登録する場合には、送信コマンド(710)として、補助データの登録コマンドが設定され、追加ゴミ補正データ(400)を登録する場合には、送信コマンド(710)として、追加ゴミ補正データ(400)の登録コマンドが設定され、補足データ(720)として、ゴミ領域の座標と半径が設定される。
【0111】
上記の画像編集機能におけるゴミ除去処理では、ゴミ補正データ(400)に登録されていなかったゴミを除去することはできない。そこで、ここでは、ゴミ補正データ(400)に登録されていないゴミのデータを、カメラ内に追加ゴミ補正データ(400)として登録する方法について述べる。
【0112】
本実施形態では、ゴミ除去処理を実行した後に、ゴミ除去処理で補正できなかったゴミの情報を追加ゴミ補正データ(400)として登録する。この処理は、ゴミ除去処理で補正できなかったゴミ領域を、ユーザが手動によりゴミ領域を指定して補間処理した際に、そのゴミ領域の情報を追加ゴミ補正データ(400)として登録するものである。
【0113】
ここでは、図5(c)で説明したフローチャートのステップS208について説明する。
【0114】
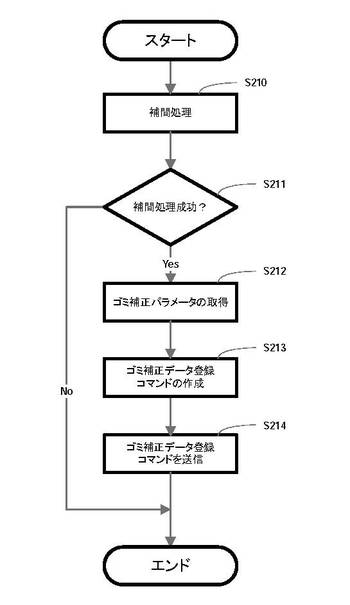
図8は、実施形態1に係るPC(100)で行われるゴミ補正データ登録処理の一例を示すフローチャートにおける、ステップS208の詳細を示したフローチャートである。
【0115】
ステップS210において、ゴミ補正データ(400)を用いたゴミ除去処理で補正できなかったゴミに対して、手動による補間処理を実行する。手動による補間処理に遷移すると、CPU(101)は、ユーザによるマウス(106a)からの指示を待つ。ユーザは、ビュー領域(501)を見て、ゴミ補正データ(400)を用いたゴミ除去処理では処理されなかったゴミ領域を探し、見つけた場合には、上述のように、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)から、座標と大きさを入力することによりゴミ領域を指定する。ゴミ補正データ(400)を用いたゴミ除去処理では処理されなかったゴミ領域が複数ある場合には、これを繰り返す。CPU(101)は、ユーザから指示を受けた領域に対して補間処理を実行する。この場合、本フローチャートはステップS210からステップS211に進む。
【0116】
ステップS211において、間処理が成功したかどうかを判定する。成功した場合はステップS306へ進み、失敗した場合は処理を終了する。具体的には、上述のゴミ領域判定を、ユーザによって指定されたゴミ領域に対して行い、ゴミ領域と判定されなかった場合には失敗として扱う。この場合、本フローチャートはステップS211からステップS212に進む。
【0117】
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径である。この場合、本フローチャートはステップS212からステップS213に進む。
【0118】
ステップS213において、ステップS212のゴミ領域の座標とゴミ領域の半径から追加ゴミ補正データ登録のコマンド(700)を作成する。この場合、本フローチャートはステップS213からステップS214に進む。
【0119】
ステップS214において、追加ゴミ補正データ登録のコマンド(700)を撮像装置(200)へ送信するすることにより、図3(c)のフローチャートのステップS111によりゴミ補正データ登録処理を実行し、メモリ(202)に追加ゴミ補正データ(400)を記録する。なお、ユーザによって指定されたゴミ領域が複数存在する場合には、ステップS210からステップS214をその数だけ繰り返せばよい。
【0120】
このようにして、追加ゴミ補正データ(400)に未登録のゴミを登録することができる。
【0121】
これにより、以後の撮影の際には、画像ファイルのヘッダ領域であるMakerNote領域にゴミ補正データ(400)、追加ゴミ補正データ(400)を追記することで、関連付けされるため、ゴミ除去画像表示ボタン(502)を押して、ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。さらに、追加ゴミ除去画像表示ボタン(503)を押して、追加ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。さらに、全体ゴミ除去画像表示ボタン(504)を押して、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。
【0122】
本実施形態では、手動によるゴミ除去処理が成功したときのみゴミ補正データ(400)へのゴミ情報の追加登録を行っている。しかし、手動によるゴミ除去処理に限らず、ゴミの位置を指定して追加ゴミ補正データ(400)を登録するための指示ができれば、他の方法を使用してもよい。
【0123】
また、手動によるゴミ除去処理などによりゴミの位置を指定して追加ゴミ補正データ(400)を登録する際に、そのゴミ情報がすでにゴミ補正データ(400)に登録されているかどうかを判定してから、登録処理を行ってもよい。この判定は、例えば、ゴミ補正データ(400)内の全てのエントリと追加指定されたゴミ領域の情報とを比較することで行う。
【0124】
また、ユーザによって指定されたゴミ領域が複数存在する場合には、ステップS210からステップS214をその数だけ繰り返していたが、追加ゴミ補正情報を1つ登録するたびに、カメラへのコマンド送信を行うのではなく、複数の追加ゴミ補正情報をまとめて、1回のカメラへの通信コマンドで行ってもよい。
【0125】
[実施例2]
実施例1では、ビュー領域として、1画面分のビュー領域(501)を表示し、ゴミ除去画像表示ボタン(504)、追加ゴミ除去画像表示ボタン(505)、全体ゴミ除去画像表示ボタン(506)を押下することで、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認していた。
【0126】
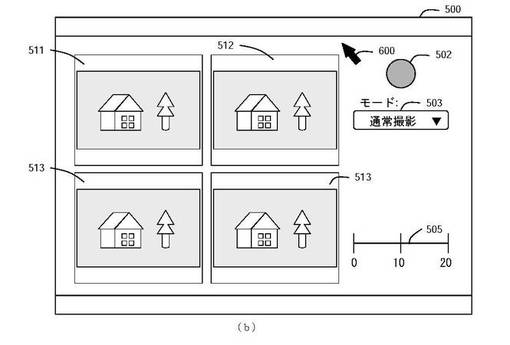
実施例2におけるメニュー画面の一例であるカメラコントロール画面(500)を図6(b)を用いて説明すると、ビュー領域をビュー領域1(511)、ビュー領域2(512)、ビュー領域3(513)、ビュー領域4(514)のように、4画面分を表示し、
ゴミ除去画像表示ボタン(504)を押すことで得られる、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域2(512)に表示し、
追加ゴミ除去画像表示ボタン(505)を押すことで得られる、デジタルカメラの本体で画像データに関連付けた追加ゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域3(513)表示し、
追加ゴミ除去画像表示ボタン(505)を押すことで得られる、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400))、および追加ゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域4(514)表示するようにしてもよい。
【0127】
これにより、ゴミ除去画像表示ボタン(502)、追加ゴミ除去画像表示ボタン(503)、全体ゴミ除去画像表示ボタン(504)を押して、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認するのではなく、各ボタンを押すことで確認できる画像をビュー領域1(511)、ビュー領域2(512)、ビュー領域3(513)、ビュー領域4(514)にすべて表示することができるようになる。
【0128】
[実施例3]
実施例1、および実施例2では、追加ゴミ補正データ(400)の登録の際に、ゴミの量にかかわらず、カメラに対して登録を行っていた。
【0129】
しかし、ゴミの量が許容できる範囲を超えた場合には、アラートを表示し、ユーザに対して、撮像素子のクリーニングを促したほうがいい場合もある。
【0130】
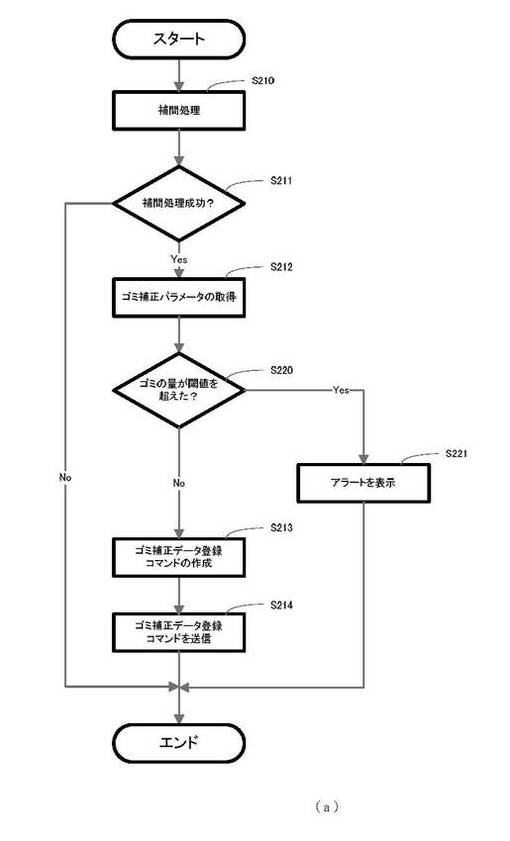
そこで、実施例3のゴミ補正データ登録処理の一例を示すフローチャートを、図9(a)を用いて説明する。
【0131】
実施例1、2と異なる部分のみ説明すると、
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径と、画像ファイルのヘッダ領域であるMakerNote領域に含まれるゴミ補正データ(400)、追加ゴミ補正データ(400)である。この場合、本フローチャートはステップS212からステップS220に進む。
【0132】
ステップS220において、ゴミ補正パラメータのゴミの量(個数、面積など)が閾値を超ええたかを判断し、超えたと判断された場合には、ステップS221に進み、超えていないと判断された場合には、ステップS213に進む。
【0133】
ステップS221において、アラートを表示する。この場合、本フローチャートは終了する。
【0134】
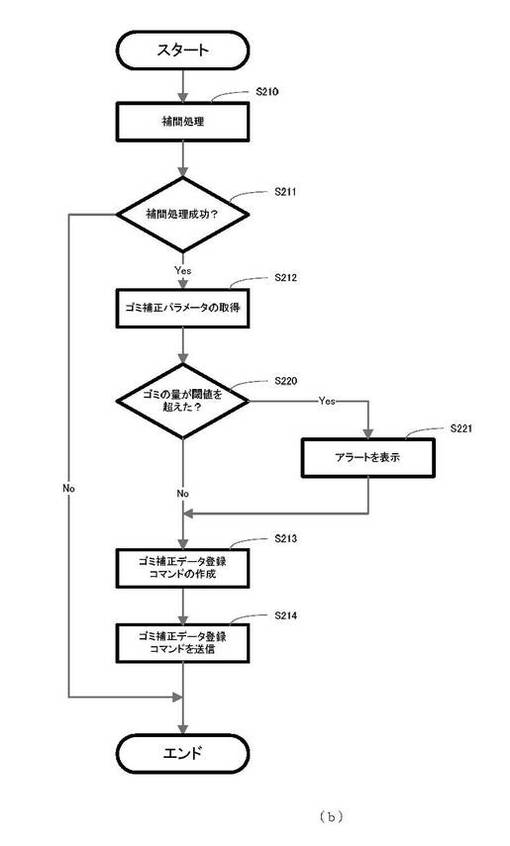
実施例3のゴミ補正データ登録処理の一例を示すフローチャートを、図9(b)を用いて説明する。
【0135】
実施例1、2と異なる部分のみ説明すると、
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径と、画像ファイルのヘッダ領域であるMakerNote領域に含まれるゴミ補正データ(400)、追加ゴミ補正データ(400)である。この場合、本フローチャートはステップS212からステップS220に進む。
【0136】
ステップS220において、ゴミ補正パラメータのゴミの量(個数、面積など)が閾値を超ええたかを判断し、超えたと判断された場合には、ステップS221に進み、超えていないと判断された場合には、ステップS213に進む。
【0137】
ステップS221において、アラートを表示する。本フローチャートはステップS221からステップS213に進む。
【0138】
これにより、ユーザが、ゴミを追加登録している際に、ゴミの量が許容できる範囲を超えた場合には、アラートを表示し、ユーザに対して、撮像素子のクリーニングなどの手続きを促すことができるようになる。
【符号の説明】
【0139】
100 制御装置
101 CPU
102 メモリ
103 ROM
104 通信部
105 表示部
106 操作部
106a マウス
106b キーボード
200 撮像装置
201 CPU
202 メモリ
203 記録部
204 通信部
205 画像処理部
206 表示部
207 操作部
208 撮像部
300 USBケーブル
400 ゴミ補正データ
410 ゴミ補正データ
500 カメラコントロール画面
501 ビュー領域
502 撮影ボタン
503 パラメータ領域
504 ゴミ除去ボタン
505 追加ゴミ除去ボタン
506 全体ゴミ除去ボタン
507 半径スライダー
511 ビュー領域1
512 ビュー領域2
513 ビュー領域3
514 ビュー領域4
600 マウスカーソル
700 コマンド
710 送信コマンド
720 補足データ
【技術分野】
【0001】
本発明は、CCDやCMOSセンサ等の撮像素子を用いた撮像装置における、光学ローパスフィルター等の表面に付着した異物による画質劣化を抑制する技術に関する。
【背景技術】
【0002】
近年、デジタルカメラやデジタルビデオカメラなどのように、CCD等の撮像素子を用いて画像信号を生成し、それをデータとして記録する撮像装置が数多く出回るようになってきている。デジタルカメラでは、従来記録媒体として使用していた感光フィルムが不要になり、これに代わって半導体メモリカードやハードディスク装置等のデータ記録媒体にデータ化された画像を記録する。これらのデータ記録媒体はフィルムと違って何度でも書き込み、消去が可能であるので、消耗品にかかる経費が少なくて済み、大変便利である。
【0003】
通常、デジタルカメラには撮像画像を随時表示可能なLCD(液晶表示器)モニタ装置と、着脱可能な大容量記憶装置が搭載されている。
【0004】
これら二つの装置を備えたデジタルカメラを利用すると、従来消耗品として使用してきた記録媒体であるフィルムが不要になるばかりでなく、撮像した画像をLCDモニタ装置に表示してその場で直ちに確認できる。したがって、満足の得られない画像データはその場で消去したり、必要に応じて再撮影したりすることが可能となり、フィルムを用いる銀塩カメラと比較すると、写真撮影の効率が飛躍的に高まったと言える。
【0005】
このような利便性と撮像素子の多画素化などの技術革新により、デジタルカメラの利用範囲は拡大しており、近年では一眼レフ方式などレンズ交換が可能なデジタルカメラも多くなってきている。
【0006】
しかしながら、デジタルカメラでは、撮像素子前方の撮影光軸上に配置された撮像素子保護ガラス、光学フィルタ等の表面上や光学系(以下、まとめて撮像素子光学系部品)にゴミ、ほこりなどの異物(以下、単にゴミ)が付着する場合がある。このように撮像素子光学系部品にゴミが付着すると、そのゴミによって光が遮られ、その部分が撮影されないなど、撮影した画像の品質が低下するという問題があった。
【0007】
したがって、撮影者は撮像素子光学系部品へのゴミの付着に常時気を使わねばならず、ゴミのチェックや清掃に多くの労力を費やしていた。特に撮像素子は、カメラ内部の比較的奥まったところに配置されているため、清掃やゴミの確認は容易ではない。
【0008】
さらにレンズ交換式のデジタルカメラでは、レンズ着脱によりゴミの侵入が容易であるばかりでなく、レンズ交換式デジタルカメラの多くは撮像素子の直前にフォーカルプレーンシャッターを配置しており、撮像素子光学系部品上にゴミが付着しやすい。
【0009】
このようなゴミは、通常撮像素子の表面にではなく、保護用のガラスや光学フィルタ上に付着しているため、撮影レンズの絞り値や撮影レンズの瞳から撮像面までの距離により結像状態が異なる。即ち、絞りが開放値に近いとぼやけてしまい、小さいゴミが付着していたとしてもほとんど影響が無くなるが、逆に絞り値が大きくなるとはっきり結像し画像に影響を与えてしまう。
【0010】
そこで、レンズの絞りを絞った状態で白い壁などを撮影し、撮像素子上のゴミだけが写った画像を予め用意して通常撮影画像と組み合わせて使用することで、ゴミを目立たなくする方法が知られている(特許文献1参照)。しかし、この方法では、ゴミ検出用に撮影した画像と、それに関連付ける本撮影画像群との対応付けを常に意識しなくてはならず、煩わしい。
【0011】
そこで、白い壁などを撮影してゴミの位置を取得した後これをデジタルカメラ上で保持しておき、通常撮影時の画像データにゴミの位置や大きさのリストを添付することが考えられる。例えば別途用意された画像処理装置を用い、添付されたゴミの位置から撮影データ上のゴミ位置を解析し、解析された領域を周囲の画素で補間処理することにより目立たなくすることができる。
【0012】
ただし、このような処理によって、画像上に写り込んだすべてのゴミを目立たなくすることは困難である。なぜなら、デジタルカメラで白い壁などを撮影してゴミの位置を取得する際に、周辺減光の影響などによりゴミの位置の取得に失敗する場合があるからである。この場合には、ゴミの位置や大きさのリストにそのゴミが登録されないため、前述の画像処理装置を用いた解析、補間処理では、そのゴミを目立たなくするということはできない。
【0013】
このように、ゴミのリストに登録されなかったゴミは、前述したようなゴミのリストを利用した画像処理では目立たなくすることはできない。そこで、そのようなゴミはユーザが自らの手によって撮影画像上のゴミの位置を指定し、リペア処理等を施すことによって目立たなく方法が知られている(特許文献2参照)。これによれば、ゴミの位置や大きさのリストをファイル情報、あるいはカメラ内の情報として追加登録できる仕組みとなっている。しかしながら、撮影画像が複数枚存在するような場合には、ユーザはすべての画像に対して、リペア処理を行うために、リストを用いることになるため、常にファイルを適用する必要があり、ユーザ負荷が大きくなってしまうという問題がある。さらに、カメラ内の情報としてリストを保持していた場合にも、同様の問題が発生する。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2004−222231号公報
【特許文献2】特開2008−244867号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
本発明は、前述した課題に鑑みてなされたものであり、その目的は、撮像装置を遠隔制御する制御装置において、撮像素子の前方に配置された保護ガラス、フィルタ等にゴミが付着した場合でも、撮影画像への影響を効率よく抑制できるようにすることである。
【課題を解決するための手段】
【0016】
上記のような課題を解決するために、本発明に係る制御装置は、第1のゴミ位置情報として、白紙を撮影することで検出されたゴミ補正データを保持する撮像装置において、撮影画像撮影時に第1のゴミ補正データを情報として付加するカメラにおいて、第2のゴミ補正データとして、PCにて第1のゴミ補正データにより画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、第2のゴミ補正データをカメラに入力すると、第1と第2のゴミ補正データを画像に付加することを特徴とする。
【発明の効果】
【0017】
本発明によれば、撮像素子の前方に配置された保護ガラス、フィルタ等にゴミが付着した場合でも、撮影画像への影響を効率よく抑制することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態1から3に係る制御システムの一例を示す図である。
【図2】本発明の実施形態1から3に係る制御システムの概略構成の一例を示すブロック図である。
【図3(a)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図3(b)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図3(c)】本発明の実施形態1から3に係る撮像装置で行われる処理の一例を示すフローチャートである。
【図4(a)】本発明の実施形態1から3に係るゴミ補正データ(400)、および追加ゴミ補正データ(400)の一例を示す図である。
【図4(b)】本発明の実施形態1から3に係るゴミ補正データ(410)、および追加ゴミ補正データ(410)の一例を示す図である。
【図5(a)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図5(b)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図5(c)】本発明の実施形態1から3に係る制御装置で行われる処理の一例を示すフローチャートである。
【図6(a)】本発明の実施形態1に係るカメラコントロール画面(500)の一例を示す図である。
【図6(b)】本発明の実施形態3に係るカメラコントロール画面(500)の一例を示す図である。
【図7】本発明の実施形態1から3に係る送信コマンド(700)の一例を示す図である。
【図8】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【図9(a)】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【図9(b)】本発明の実施形態1から3に係る制御装置、および撮像装置で行われる追加ゴミ補正データ(400)の登録処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の好適な実施形態について、図面を参照して詳細に説明する。
【0020】
[実施例1]
図1は、本発明の実施形態1に係る遠隔制御システムの概略構成の一例を示す図である。図2は、本発明の実施形態1に係る遠隔制御システムの一例を示すブロック図である。
【0021】
実施形態1に係る通信システムは、図1及び図2に示すように、制御装置(100)、インターフェース(300)、撮像装置(200)を有する。制御装置(100)と撮像装置(200)は、インターフェース(300)を介して接続されている。インターフェース(300)の一例として、USB(Universal Serial Bus)接続ケーブルを用いる。以下では、接続ケーブルを「USBケーブル」として説明する。
【0022】
次に、PC(100)の構成の一例を説明する。
【0023】
PC(100)は、図2に示すように、CPU(Central Processing Unit)(101)、メモリ(102)、通信部(104)、表示部(105)、操作部(106)を有する。
【0024】
表示部(105)は、液晶ディスプレイ等の表示器により構成される。表示部(105)は、メモリ(102)及び通信部(104)の少なくとも一つから供給された映像データを表示することができる。また、表示部(105)は、メモリ(102)に記憶されているグラフィカルユーザインターフェースであるメニュー画面を表示することもできる。メニュー画面は、PC(100)を制御するためのPC制御画面、PC(100)の設定を変更するためのPC設定画面、または、撮像装置(200)を制御するためのカメラコントロール画面(500)等を含む。
【0025】
なお、これらのメニュー画面が表示部(105)に表示されている場合、CPU(201)はマウスカーソル(矢印の形状のアイコン)(600)をメニュー画面に重畳して表示する。
【0026】
また、表示部(105)は、CPU(101)から供給されたカメラコントロール画面(500)の所定の領域に、通信部(104)から供給された映像データを表示する。カメラコントロール画面(500)の説明は後述する。
【0027】
操作部(106)は、PC(100)を操作するためのユーザインターフェースである。また、操作部(106)は、PC(100)を操作するための操作手段として、マウス(106a)やタブレット、トラックボール等のポインティングデバイスやキーボード(106b)を有する。これらのポインティングデバイスをユーザが操作することによって、メニュー画面に重畳されたマウスカーソル(600)をメニュー画面上で操作を行うことができる。
【0028】
メニュー画面上において、ポインティングデバイスの位置情報に応じてマウスカーソル(600)はメニュー画面上を移動し、ポインティングデバイスが押下されると、マウスカーソル(600)は検出された領域に応じて処理を行う。
【0029】
次に撮像装置(200)の構成の一例を説明する。
【0030】
撮像装置(200)は、図2に示すように、CPU(201)、メモリ(202)、記録部(203)、通信部(204)、画像処理部(205)、表示部(206)、操作部(207)、撮像部(208)を有する。
【0031】
撮像装置(200)は、撮影モード、再生モード、ゴミ検出モード、ゴミ補正データ登録モード等の動作モードを有する。撮像装置(200)の動作モードが撮影モードである場合、撮像装置(200)は、被写体の撮影が可能になり、撮影された映像(動画、静止画のいずれでもよい)を記録媒体に記録することができる。撮像装置(200)の動作モードが再生モードである場合、ユーザによって選択された映像(動画、静止画のいずれでもよい)を記録媒体から再生することができる。撮像装置(200)の動作モードがゴミ検出モードである場合、撮像装置(200)は、静止画を撮影し、画像からゴミ補正データ(400)を検出し、メモリ(202)にゴミ補正データ(400)を記録する。撮像装置(200)の動作モードがゴミ補正データ登録モードである場合、撮像装置(200)は、USBケーブル(300)を介してPC(100)から転送されたゴミ補正データ(400)を取得してメモリ(202)に追加ゴミ補正データ(400)を記録する。
【0032】
ゴミ補正データ(400)、および追加ゴミ補正データ(400)の説明は、図4(a)、図4(b)を用いて後に説明する。
【0033】
メモリ(202)に記憶される情報には、撮像装置(200)を制御するコンピュータプログラム、表示部(206)に表示される所定の画像データやアイコン、ゴミ補正データ(400)、追加ゴミ補正データ(400)等がある。
【0034】
撮像装置(200)の動作モードが撮影モードである場合、撮像部(208)は、被写体を撮影し、当該被写体の光学像から映像データを生成する。この際、メモリ(202)にゴミ補正データ(400)、追加ゴミ補正データ(400)が記録されていれば、映像データのMakerNote内にゴミ補正データ(400)、追加ゴミ補正データ(400)を記録する。撮像部(208)によって生成された映像データは、通信部(204)、画像処理部(205)及び表示部(206)に供給される。不図示のマイクロフォン部が生成した音声データも、記録部(203)及び通信部(204)に供給される。
【0035】
さらに、撮像装置(200)の動作モードが撮影モードである場合、記録部(203)は、画像処理部(205)でさまざまな画像処理が行なわれた映像データと、不図示のマイクロフォン部が生成した音声データとを記録媒体に記録することができる。この際、メモリ(202)にゴミ補正データ(400)、追加ゴミ補正データ(400)が記録されていれば、映像データのMakerNote内にゴミ補正データ(400)、追加ゴミ補正データ(400)を記録する。
【0036】
また、撮像装置(200)の動作モードが再生モードである場合、記録部(203)は、ユーザによって選択された映像データ及び音声データを記録媒体から再生することができる。記録媒体から再生された映像データは、表示部(206)及び通信部(204)に供給される。一方、記録媒体から再生された音声データは、通信部(204)及び不図示のスピーカ部に供給される。
【0037】
表示部(206)は、液晶ディスプレイ等により構成される。撮像装置(200)の動作モードが撮影モードである場合、表示部(206)は、撮像部(208)が生成した映像データを表示する。撮像装置(200)の動作モードが再生モードである場合、表示部(206)は、記録部(203)が記録媒体から再生した映像データを表示する。
【0038】
操作部(207)は、撮像装置(200)を操作するためのユーザインターフェースであり、撮像装置(200)を操作するための複数のボタンを有する。ユーザからの指示は、操作部(207)を介してCPU(201)に入力される。操作部(207)内の各ボタンは、スイッチ、タッチパネル等により構成される。
【0039】
操作部(207)は、シャッターボタン、電源ボタン、スタート/ストップボタン、モード変更ボタン、メニューボタン、十字ボタン、SETボタン等を有する。
【0040】
シャッターボタンは、シャッターボタンの半押しされた状態であるS1とシャッターボタンの全押しされた状態であるS2の2つの状態を持つ。撮像装置(200)の動作モードが撮影モードの場合、シャッターボタンが押下されたときにシャッターボタンがS2の状態では、CPU(201)は撮像部(208)に一連の撮影処理の動作開始を指示する。シャッターボタンがS2の状態のときに撮像部(208)が行う撮影処理については、後述する。
【0041】
スタート/ストップボタンは、撮像部(208)によって生成された映像データ等の記録媒体への記録の開始又は一時停止をCPU(201)に指示するボタンである。モード変更ボタンは、撮像装置(200)の動作モードを撮影モード、再生モード、ゴミ検出モード、ゴミ補正データ登録モード等のいずれかに変更することをCPU(201)に指示するボタンである。
【0042】
メニューボタンは、撮像装置(200)のメニュー画面の表示又は非表示をCPU(201)に指示するボタンである。撮像装置(200)のメニュー画面は、撮像装置(200)を制御するためのメニュー画面、撮像装置(200)の設定を変更するためのメニュー画面を含む。これらのメニュー画面は、メモリ(202)に記憶されている。
【0043】
また、操作部(207)は、再生ボタン、停止ボタン、一時停止ボタン、早送りボタン、巻き戻しボタン等を有する。これらのボタンは、記録媒体に記録された映像データの再生(play)、停止(Stop)、一時停止(pauSe)、早送り(fast forward)及び巻き戻し(rewind)の実行をCPU(201)に指示するボタンである。
【0044】
次に、撮影処理について説明を行う。
【0045】
撮影処理とは撮像装置(200)のシャッターボタンが全押しされてS2の状態になった場合、通常カメラで行われる処理のことである。
【0046】
この処理では、撮像素子から出力されたアナログデータがA/D変換部でデジタルデータに変換された後、画像処理部(205)で圧縮を行い、記録部(203)に画像データを書き込む。この際、通常撮影時には、撮影時のカメラ設定値等と共に図5に示したゴミ補正データ(400)、追加ゴミ補正データ(400)を画像データに関連付けて記録部(203)に画像データを書き込む。ゴミ検出時には、撮影によって得られた画像データから図5に示したゴミを検出し、ゴミ補正データ(400)としてメモリ(202)へ書き込む。
【0047】
次に、図1、図2及び図3(a)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われる撮影処理の一例を示すフローチャートである。
【0048】
図3のフローチャートが示す処理は、PC(100)と撮像装置(200)とがUSBケーブル(300)を介して接続され、PC(100)及び撮像装置(200)が電源オン状態であるときに実行される処理である。なお、図3のフローチャートに示す処理は、CPU(201)がメモリ(202)に記憶されているコンピュータプログラムを実行することによって制御される。
【0049】
ステップS101において、撮像装置(200)の動作モードが操作部(207)で撮影モードに設定された場合、CPU(201)は通信部(204)に撮影モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS101からステップS102に進む。
【0050】
ステップS102において、CPU(201)は通信部(204)が撮影準備コマンドを受信したか否かを判定する。CPU(201)が撮影準備コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影準備フラグを設定する。この場合、本フローチャートはステップS102からステップS103に進む。CPU(201)が撮影準備コマンドを受信しなかったと判定した場合は、本フローチャートはステップS102からステップS102に戻る。
【0051】
ステップS103において、CPU(201)は撮影準備処理を撮像部(208)に実行させるように指示を出す。撮影準備処理が行なわれた場合、本フローチャートはステップS103からステップS104に進む。
【0052】
ステップS104において、CPU(201)は通信部(204)がPC(100)からの撮影コマンドを受信したか否かを判定する。CPU(201)は通信部(204)が撮影コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影フラグをセットする。この場合、本フローチャートはステップS104からステップS105に進む。CPU(201)は通信部(204)が撮影コマンドを受信しなかったと判定した場合は、CPU(201)はメモリ(202)の撮影準備フラグをリセットする。この場合、本フローチャートはステップS104からステップS102に戻る。
【0053】
ステップS105において、CPU(201)は撮影処理を撮像部(208)に実行させるように指示を出す。ここで、ゴミ補正データ(400)、もしくは追加ゴミ補正データ(400)が、メモリ(202)内に記録されている場合には、図5に示したゴミ補正データ(400)、追加ゴミ補正データ(400)を画像データに関連付けて記録部(203)に画像データを書き込む。
撮影処理が行なわれた場合、CPU(201)はメモリ(202)の撮影準備フラグ及び撮影フラグをリセットする。この場合、本フローチャートはステップS105からステップS106に進む。
【0054】
ステップS106において、撮影処理が完了した後、CPU(201)は通信部(204)に画像データの送信準備が完了したことを示す準備完了信号を生成させ、PC(100)に送信するように指示を出す。PC(100)に準備完了信号が送信された後、CPU(201)は記録部(203)から画像データを読み出して、通信部に読み出した画像データをPCに送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0055】
次に、図1、図2及び図3(b)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われるゴミ検出処理の一例を示すフローチャートである。
【0056】
ステップS107において、撮像装置(200)の動作モードが操作部(207)でゴミ検出モードに設定された場合、CPU(201)は通信部(204)にゴミ検出モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS107からステップS104に進む。
【0057】
ステップS104において、CPU(201)は通信部(204)がPC(100)からの撮影コマンドを受信したか否かを判定する。CPU(201)は通信部(204)が撮影コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)に撮影フラグをセットする。この場合、本フローチャートはステップS104からステップS108に進む。
【0058】
ステップS108において、ゴミ取得処理が完了した後、CPU(201)は通信部(204)にゴミ取得処理が完了したことを示すゴミ取得完了信号を生成させ、PC(100)に送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0059】
次に、ステップS108で行われるゴミ取得処理について説明する。このゴミ検出処理は、画像に写り込んだ、不図示の撮像素子の前方に配置された不図示の光学部材の表面に付着したゴミの影の位置、大きさ等を検出する処理である。ゴミ検出処理は、ゴミ検出用画像を撮像することにより行われる。ゴミ検出処理を行う場合、面光源装置の出射面や白い壁などの均一な色を持つ面に不図示のレンズの撮影光軸を向けてカメラを設置し、ゴミ検出の準備を行う。本実施形態においてゴミ検出用画像は、均一な色を有する画像である。準備が終了した後、例えば操作部(207)からゴミ検出処理の開始が指示されると、CPU201は、まず絞りの設定を行う。撮像素子近傍のゴミはレンズの絞り値によって結像状態が変わり、レンズの瞳位置によって位置が変化する。したがって、ゴミ補正データ(400)にはゴミの位置や大きさに加え、検出時の絞り値とレンズの瞳位置を保持する必要がある。ここで瞳位置とは、射出瞳の撮像面(焦点面)からの距離をいう。ただし、ゴミ補正データ(400)を作成する段階で、異なるレンズを用いたとしても常に同じ絞り値を使うことを予め決めておけば、必ずしもゴミ補正データ(400)内に絞り値を保持する必要はない。
【0060】
ステップS111において、不図示の撮影レンズの絞り値が指定される。ここでは、例えばF22を指定する。この場合、本フローチャートはステップS111からステップS112に進む。
【0061】
ステップS112において、CPU201は不図示のレンズ制御回路に対し、不図示の撮影レンズの絞り羽根制御を行わせ、ステップS111で指定された絞り値に絞りを設定する。この場合、本フローチャートはステップS112からステップS113に進む。
【0062】
ステップS113において、フォーカス位置を無限遠に設定する。この場合、本フローチャートはステップS113からステップS114に進む。
【0063】
ステップS114において、撮影レンズの絞り値とフォーカス位置が設定されると、ゴミ検出モードでの撮影を実行する。撮影された画像データは、メモリ202に格納される。この場合、本フローチャートはステップS114からステップS115に進む。
【0064】
ステップS115において、撮影が終了すると、画像処理部207にメモリ202に記憶されている撮影画像の各画素に対応するデータを呼び出す。この場合、本フローチャートはステップS115からステップS116に進む。
【0065】
ステップS116において、画像処理部205は、ゴミ領域取得処理を行い、ゴミ領域(ゴミの影)が存在する画素の位置と大きさを取得する。この場合、本フローチャートはステップS116からステップS117に進む。ゴミ領域取得処理は、文献2の(ゴミ取得ルーチン)の説明と同等である。
【0066】
ステップS117において、ステップS116で取得したゴミ領域が存在する画素の位置と大きさを、メモリ202に登録する。ここで、ステップS117において、予め画素不良位置メモリに記録されている製造時からの不良画素の位置と、読み出した画素データの位置を比べて画素不良であるかどうかを確認する。そして、画素不良によるものでは無いと判断された領域のみ、メモリ202に位置を登録しても良い。メモリ202に格納されるゴミ補正データ(400)のデータ形式例を図4(a)に示す。図4(a)に示した通り、ゴミ補正データ(400)には、ゴミ検出用画像撮影時の、ゴミの位置、大きさの情報が格納される。このゴミ補正データ(400)は、通常撮影時に画像データの撮影時情報と共に画像に付加し、ゴミ除去処理、補間処理で利用される。ゴミ除去処理、文献2の(ゴミ除去処理)の説明と同等である。補間処理は、文献2の(補間ルーチン)の説明と同等である。具体的には、記憶領域に検出したゴミ領域の数(整数値)を格納し、これに続き、個々の具体的なゴミ領域のパラメータを、ゴミ領域の数だけ繰返して格納する。ゴミ領域のパラメータは、ゴミ領域の半径(例えば2バイト)、有効画像領域における中心のx座標(例えば2バイト)、おなじく中心のy座標(例えば2バイト)の3つの数値のセットである。メモリ202の大きさ等によりゴミ補正データサイズに制限がある場合、ゴミ領域の先頭から優先してデータを格納する。これは、ステップS117のゴミ領域取得ルーチン内では、ゴミ領域を、目立つゴミの順にソートするからである。ここで、ゴミ補正データ(400)のデータ形式は、図4(b)のように、ゴミ補正データ(400)には、検出画像撮影時のレンズ情報として、検出画像撮影時における実際の絞り値(F値)と、そのときのレンズ瞳位置を格納するようにしても良い。
【0067】
次に、図1、図2及び図3(c)を参照し、実施形態1に係る撮像装置(200)で行われる処理を説明する。図3は実施形態1に係る撮像装置(200)で行われるゴミ補正データ登録処理の一例を示すフローチャートである。
【0068】
ステップS109において、撮像装置(200)の動作モードが操作部(207)でゴミ補正データ登録モードに設定された場合、CPU(201)は通信部(204)にゴミ補正データ登録モードを示す動作モード信号を生成させ、USBケーブル(300)を介してPC(100)の通信部(104)に送信するように指示を行う。この場合、本フローチャートはステップS109からステップS110に進む。
【0069】
ステップS110において、CPU(201)は通信部(204)がPC(100)からのゴミ補正データ登録コマンドを受信したか否かを判定する。CPU(201)は通信部(204)がゴミ補正データ登録コマンドを受信したと判定した場合は、CPU(201)はメモリ(202)にゴミ補正データ登録フラグをセットする。この場合、本フローチャートはステップS110からステップS111に進む。
【0070】
ステップS111において、追加ゴミ補正データ(400)の登録処理が完了した後、CPU(201)は通信部(204)に追加ゴミ補正データ(400)の登録処理が完了したことを示すゴミ補正データ(400)の登録完了信号を生成させ、PC(100)に送信するように指示を出す。この場合、本フローチャートで行われる撮像装置(200)の処理は終了する。
【0071】
次に、図1、図2及び図5(a)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(a)は実施形態1に係るPC(100)で行われる撮影処理の一例を示すフローチャートである。図5(a)のフローチャートが示す処理は、PC(100)と撮像装置(200)とがUSBケーブル(300)を介して接続され、PC(100)及び撮像装置(200)が電源オン状態であるときに実行される処理である。なお、図5(a)のフローチャートに示す処理は、CPU(101)がメモリ(102)に記憶されているコンピュータプログラムを実行することによって制御される。
【0072】
通信部(104)が撮像装置(200)から撮影モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「撮影モード」に設定する。
【0073】
その後、CPU(101)はメモリ(102)からカメラコントロール画面(500)を読み出して、表示部(105)に表示させる。
【0074】
同様にして、通信部(104)が撮像装置(200)からゴミ検出モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「ゴミ検出モード」に設定する。
【0075】
同様にして、通信部(104)が撮像装置(200)からゴミ補正データ登録モードを示す動作モード信号を受信した場合、CPU(101)はメモリ(102)に動作モードフラグを「ゴミ補正データ登録モード」に設定する。
【0076】
ステップS201において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS201からステップS203に進む。CPU(101)によって、マウスカーソル(600)が撮影ボタン(502)の領域上で検出されなかった場合、本フローチャートは、ステップS201からステップS201に戻る。
【0077】
ステップS203において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上マウスオーバされているか否かを判定する。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出したと判定した場合、本フローチャートは、ステップS203からステップS204に進む。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出しなかった場合、本フローチャートは、ステップS203からステップS201に戻る。
【0078】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS205に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS203に戻る。
【0079】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)に撮影コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは、ステップS205からステップS206に進む。ステップS205を実行後、図3(a)のフローチャートのステップS105により撮影処理を実行し、ステップS106により画像データ送信を実行し、PC(100)に画像データが送られてくる。
【0080】
ステップS206において、CPU(101)は撮像装置(200)から送られた画像データを、表示部(105)に表示させる。ここで、本フローチャートは終了する。
【0081】
このように、マウス(106a)を操作することによってマウスカーソル(600)が撮影ボタン(502)の領域上にマウスオーバするとPC(100)は撮像装置(200)に撮影準備処理を指示する。その後、マウスカーソル(600)がマウスオーバされた撮影ボタン(502)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)に撮影処理を指示する。さらに、撮像装置(200)からPC(100)へ送られた画像データを表示する。
【0082】
次に、図1、図2及び図5(b)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(b)は実施形態1に係るPC(100)で行われるゴミ検出処理の一例を示すフローチャートである。
【0083】
ステップS201において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS201からステップS203に進む。CPU(101)によって、マウスカーソル(600)が撮影ボタン(502)の領域上で検出されなかった場合、本フローチャートは、ステップS201からステップS201に戻る。
【0084】
ステップS203において、CPU(101)は第1の判定手段としてマウスカーソル(600)が撮影ボタン(502)の領域上マウスオーバされているか否かを判定する。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出したと判定した場合、本フローチャートは、ステップS203からステップS204に進む。CPU(101)がマウスカーソル(600)を撮影ボタン(502)の領域上で検出しなかった場合、本フローチャートは、ステップS203からステップS201に戻る。
【0085】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS205に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS203に戻る。
【0086】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)にゴミ検出コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは終了する。
【0087】
ステップS205を実行後、図3(b)のフローチャートのステップS108によりゴミ検出処理を実行し、メモリ(202)にゴミ補正データ(400)を記録する。
【0088】
このように、マウスカーソル(600)がマウスオーバされた撮影ボタン(502)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)にゴミ検出処理を指示する。
【0089】
次に、図1、図2及び図5(c)を参照し、実施形態1に係るPC(100)で行われる処理を説明する。図5(c)は実施形態1に係るPC(100)で行われるゴミ補正データ登録処理の一例を示すフローチャートである。
【0090】
ここでは、ビュー領域(501)の領域上のにあるゴミを指定することで、カメラに追加ゴミ補正情報を登録する流れに限定して説明するが、具体的な操作の流れについては、後述する図6(a)に示すメニュー画面の一例であるカメラコントロール画面(500)の中で説明する。
【0091】
ステップS207において、CPU(101)は第1の判定手段としてマウスカーソル(600)がビュー領域(501)の領域上で検出されたか否か判定する。この場合、本フローチャートはステップS207からステップS204に進む。CPU(101)によって、マウスカーソル(600)がビュー領域(501)の領域上で検出されなかった場合、本フローチャートは、ステップS207からステップS207に戻る。
【0092】
ステップS204において、CPU(101)は第2の判定手段としてマウスカーソル(600)を操作する操作部(106)のマウス(106a)のボタンがクリックされたか否かを判定する。CPU(101)がマウス(106a)のボタンがクリックされたと判定した場合、本フローチャートは、ステップS204からステップS208に進む。CPU(101)がマウス(106a)のボタンがクリックされたと判定しなかった場合、本フローチャートはステップS204からステップS204に戻る。
【0093】
ステップS205において、CPU(101)によってマウスカーソル(600)が撮影ボタン(502)の領域上にある場合にマウス(106a)のボタンがクリックされると、CPU(101)は第2の指示手段として通信部(104)にゴミ検出コマンドを生成させ、撮像装置(200)に送信する。ここで、本フローチャートは終了する。
【0094】
ステップS205を実行後、図3(c)のフローチャートのステップS111によりゴミ補正データ登録処理を実行し、メモリ(202)に追加ゴミ補正データ(400)を記録する。
【0095】
このように、マウスカーソル(600)がマウスオーバされたビュー領域(501)の領域上にある場合、マウス(106a)がクリックされるとPC(100)は撮像装置(200)にゴミ補正データ登録処理を指示する。
【0096】
なお、実施形態1では不図示のファインダーを通して撮影対象を確認して撮像装置(200)を遠隔制御する形だが、ライブビュー映像をPC(100)の表示部(105)に表示して、撮影対象を確認しながら、撮像装置(200)を遠隔制御する形でもよい。
【0097】
図6(a)は、メニュー画面の一例であるカメラコントロール画面(500)を表すもので、パソコンのOSで標準的に採用されているようなウィンドウシステム上に構成したものである。
【0098】
また、カメラコントロール画面(500)の機能として、画像編集機能を持ち、ゴミ除去処理、補間処理を実行可能である。ゴミ除去処理は、特許文献2の(ゴミ除去処理)の説明と同等である。補間処理は、特許文献2の(補間ルーチン)の説明と同等である。
【0099】
カメラコントロール画面(500)はカメラの遠隔制御するためのウィンドウで、映像データを表示するビュー領域(501)、撮影ボタン(502)、パラメータ領域(503)、ゴミ除去画像表示ボタン(504)、追加ゴミ除去画像表示ボタン(505)、全体ゴミ除去画像表示ボタン(506)、半径スライダ(507)等がある。
【0100】
ビュー領域(501)は、撮像装置(200)から通信部(104)で連続的に受信したライブビュー映像、もしくは撮影動作により受信した静止画像、もしくは再生動作により受信した動画像、および静止画像を表示している。
【0101】
撮影ボタン(502)は、シャッターボタンの半押しされた状態であるS1とシャッターボタンの全押しされた状態であるS2の2つの状態の撮影処理を行う。マウスカーソル(600)が撮影ボタン(502)上に移動した時、撮像装置(200)の動作モードが通常撮影モードの場合、PC(100)から撮像装置(200)に対して撮影準備処理の開始を指示する。マウスカーソル(600)が撮影ボタン(502)上にある状態でクリックした時、撮像装置(200)の動作モードが通常撮影モードの場合、PC(100)から撮像装置(200)に対して一連の撮影処理の動作開始を指示する。
【0102】
パラメータ領域(503)には、撮影モード等が表示されている。これらの値は、撮像装置(200)から受信する補助データに含まれている。なお、パラメータ領域(503)はこれ以外の補助データを表示するものであっても良い。また、操作によりパラメータ領域(503)上の値が変更された場合には、CPU(101)は通信部(104)に補助データ設定用のコマンド(700)を生成させ、撮像装置(200)に送信する。これにより、撮像装置のパラメータが変更される。
【0103】
CPU(101)は通信部(104)で撮像装置(200)から受信したデータをそれぞれビュー領域(501)、パラメータ領域(503)に表示するように制御している。
【0104】
ゴミ除去画像表示ボタン(504)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0105】
追加ゴミ除去画像表示ボタン(505)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けた追加ゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0106】
全体ゴミ除去画像表示ボタン(506)は、ボタン領域上でマウスカーソル(600)押下することで、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)、および追加ゴミ補正データ(400)を用い、指定された座標に対してゴミ除去処理を実行し、処理後の画像をビュー領域(501)に表示する。
【0107】
半径スライダ(507)は、補間処理の適用範囲を指定するスライダである。スライダをマウスカーソル(600)により移動させることで半径を変更する。
【0108】
また、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指定された半径に基づき、表示画像の補間処理を行う。さらに、CPU(101)は通信部(104)に追加ゴミ補正データ登録用のコマンド(700)を生成させ、撮像装置(200)へ送信することにより、ゴミ領域の座標と半径をカメラ内の追加ゴミ補正データ(400)として登録する。
【0109】
図7は、コマンド(700)について、図示している。
【0110】
コマンド(700)は、カメラを制御するための送信コマンド(710)、補足データ(720)で構成される。例えば、補助データを登録する場合には、送信コマンド(710)として、補助データの登録コマンドが設定され、追加ゴミ補正データ(400)を登録する場合には、送信コマンド(710)として、追加ゴミ補正データ(400)の登録コマンドが設定され、補足データ(720)として、ゴミ領域の座標と半径が設定される。
【0111】
上記の画像編集機能におけるゴミ除去処理では、ゴミ補正データ(400)に登録されていなかったゴミを除去することはできない。そこで、ここでは、ゴミ補正データ(400)に登録されていないゴミのデータを、カメラ内に追加ゴミ補正データ(400)として登録する方法について述べる。
【0112】
本実施形態では、ゴミ除去処理を実行した後に、ゴミ除去処理で補正できなかったゴミの情報を追加ゴミ補正データ(400)として登録する。この処理は、ゴミ除去処理で補正できなかったゴミ領域を、ユーザが手動によりゴミ領域を指定して補間処理した際に、そのゴミ領域の情報を追加ゴミ補正データ(400)として登録するものである。
【0113】
ここでは、図5(c)で説明したフローチャートのステップS208について説明する。
【0114】
図8は、実施形態1に係るPC(100)で行われるゴミ補正データ登録処理の一例を示すフローチャートにおける、ステップS208の詳細を示したフローチャートである。
【0115】
ステップS210において、ゴミ補正データ(400)を用いたゴミ除去処理で補正できなかったゴミに対して、手動による補間処理を実行する。手動による補間処理に遷移すると、CPU(101)は、ユーザによるマウス(106a)からの指示を待つ。ユーザは、ビュー領域(501)を見て、ゴミ補正データ(400)を用いたゴミ除去処理では処理されなかったゴミ領域を探し、見つけた場合には、上述のように、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)から、座標と大きさを入力することによりゴミ領域を指定する。ゴミ補正データ(400)を用いたゴミ除去処理では処理されなかったゴミ領域が複数ある場合には、これを繰り返す。CPU(101)は、ユーザから指示を受けた領域に対して補間処理を実行する。この場合、本フローチャートはステップS210からステップS211に進む。
【0116】
ステップS211において、間処理が成功したかどうかを判定する。成功した場合はステップS306へ進み、失敗した場合は処理を終了する。具体的には、上述のゴミ領域判定を、ユーザによって指定されたゴミ領域に対して行い、ゴミ領域と判定されなかった場合には失敗として扱う。この場合、本フローチャートはステップS211からステップS212に進む。
【0117】
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径である。この場合、本フローチャートはステップS212からステップS213に進む。
【0118】
ステップS213において、ステップS212のゴミ領域の座標とゴミ領域の半径から追加ゴミ補正データ登録のコマンド(700)を作成する。この場合、本フローチャートはステップS213からステップS214に進む。
【0119】
ステップS214において、追加ゴミ補正データ登録のコマンド(700)を撮像装置(200)へ送信するすることにより、図3(c)のフローチャートのステップS111によりゴミ補正データ登録処理を実行し、メモリ(202)に追加ゴミ補正データ(400)を記録する。なお、ユーザによって指定されたゴミ領域が複数存在する場合には、ステップS210からステップS214をその数だけ繰り返せばよい。
【0120】
このようにして、追加ゴミ補正データ(400)に未登録のゴミを登録することができる。
【0121】
これにより、以後の撮影の際には、画像ファイルのヘッダ領域であるMakerNote領域にゴミ補正データ(400)、追加ゴミ補正データ(400)を追記することで、関連付けされるため、ゴミ除去画像表示ボタン(502)を押して、ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。さらに、追加ゴミ除去画像表示ボタン(503)を押して、追加ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。さらに、全体ゴミ除去画像表示ボタン(504)を押して、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認することができるようになる。
【0122】
本実施形態では、手動によるゴミ除去処理が成功したときのみゴミ補正データ(400)へのゴミ情報の追加登録を行っている。しかし、手動によるゴミ除去処理に限らず、ゴミの位置を指定して追加ゴミ補正データ(400)を登録するための指示ができれば、他の方法を使用してもよい。
【0123】
また、手動によるゴミ除去処理などによりゴミの位置を指定して追加ゴミ補正データ(400)を登録する際に、そのゴミ情報がすでにゴミ補正データ(400)に登録されているかどうかを判定してから、登録処理を行ってもよい。この判定は、例えば、ゴミ補正データ(400)内の全てのエントリと追加指定されたゴミ領域の情報とを比較することで行う。
【0124】
また、ユーザによって指定されたゴミ領域が複数存在する場合には、ステップS210からステップS214をその数だけ繰り返していたが、追加ゴミ補正情報を1つ登録するたびに、カメラへのコマンド送信を行うのではなく、複数の追加ゴミ補正情報をまとめて、1回のカメラへの通信コマンドで行ってもよい。
【0125】
[実施例2]
実施例1では、ビュー領域として、1画面分のビュー領域(501)を表示し、ゴミ除去画像表示ボタン(504)、追加ゴミ除去画像表示ボタン(505)、全体ゴミ除去画像表示ボタン(506)を押下することで、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認していた。
【0126】
実施例2におけるメニュー画面の一例であるカメラコントロール画面(500)を図6(b)を用いて説明すると、ビュー領域をビュー領域1(511)、ビュー領域2(512)、ビュー領域3(513)、ビュー領域4(514)のように、4画面分を表示し、
ゴミ除去画像表示ボタン(504)を押すことで得られる、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域2(512)に表示し、
追加ゴミ除去画像表示ボタン(505)を押すことで得られる、デジタルカメラの本体で画像データに関連付けた追加ゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域3(513)表示し、
追加ゴミ除去画像表示ボタン(505)を押すことで得られる、デジタルカメラの本体で画像データに関連付けたゴミ補正データ(400))、および追加ゴミ補正データ(400)を用いたゴミ除去処理後の画像をビュー領域4(514)表示するようにしてもよい。
【0127】
これにより、ゴミ除去画像表示ボタン(502)、追加ゴミ除去画像表示ボタン(503)、全体ゴミ除去画像表示ボタン(504)を押して、ゴミ補正データ(400)、および追加ゴミ補正データ(400)によるゴミ除去効果を確認するのではなく、各ボタンを押すことで確認できる画像をビュー領域1(511)、ビュー領域2(512)、ビュー領域3(513)、ビュー領域4(514)にすべて表示することができるようになる。
【0128】
[実施例3]
実施例1、および実施例2では、追加ゴミ補正データ(400)の登録の際に、ゴミの量にかかわらず、カメラに対して登録を行っていた。
【0129】
しかし、ゴミの量が許容できる範囲を超えた場合には、アラートを表示し、ユーザに対して、撮像素子のクリーニングを促したほうがいい場合もある。
【0130】
そこで、実施例3のゴミ補正データ登録処理の一例を示すフローチャートを、図9(a)を用いて説明する。
【0131】
実施例1、2と異なる部分のみ説明すると、
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径と、画像ファイルのヘッダ領域であるMakerNote領域に含まれるゴミ補正データ(400)、追加ゴミ補正データ(400)である。この場合、本フローチャートはステップS212からステップS220に進む。
【0132】
ステップS220において、ゴミ補正パラメータのゴミの量(個数、面積など)が閾値を超ええたかを判断し、超えたと判断された場合には、ステップS221に進み、超えていないと判断された場合には、ステップS213に進む。
【0133】
ステップS221において、アラートを表示する。この場合、本フローチャートは終了する。
【0134】
実施例3のゴミ補正データ登録処理の一例を示すフローチャートを、図9(b)を用いて説明する。
【0135】
実施例1、2と異なる部分のみ説明すると、
ステップS212において、ゴミ補正パラメータの取得を行う。ここで言うゴミ補正パラメータとは、ユーザが、ビュー領域(501)のマウスカーソル(600)の操作と半径スライダ(505)で指示したゴミ領域の座標とゴミ領域の半径と、画像ファイルのヘッダ領域であるMakerNote領域に含まれるゴミ補正データ(400)、追加ゴミ補正データ(400)である。この場合、本フローチャートはステップS212からステップS220に進む。
【0136】
ステップS220において、ゴミ補正パラメータのゴミの量(個数、面積など)が閾値を超ええたかを判断し、超えたと判断された場合には、ステップS221に進み、超えていないと判断された場合には、ステップS213に進む。
【0137】
ステップS221において、アラートを表示する。本フローチャートはステップS221からステップS213に進む。
【0138】
これにより、ユーザが、ゴミを追加登録している際に、ゴミの量が許容できる範囲を超えた場合には、アラートを表示し、ユーザに対して、撮像素子のクリーニングなどの手続きを促すことができるようになる。
【符号の説明】
【0139】
100 制御装置
101 CPU
102 メモリ
103 ROM
104 通信部
105 表示部
106 操作部
106a マウス
106b キーボード
200 撮像装置
201 CPU
202 メモリ
203 記録部
204 通信部
205 画像処理部
206 表示部
207 操作部
208 撮像部
300 USBケーブル
400 ゴミ補正データ
410 ゴミ補正データ
500 カメラコントロール画面
501 ビュー領域
502 撮影ボタン
503 パラメータ領域
504 ゴミ除去ボタン
505 追加ゴミ除去ボタン
506 全体ゴミ除去ボタン
507 半径スライダー
511 ビュー領域1
512 ビュー領域2
513 ビュー領域3
514 ビュー領域4
600 マウスカーソル
700 コマンド
710 送信コマンド
720 補足データ
【特許請求の範囲】
【請求項1】
撮像装置(200)を遠隔制御する制御装置(100)であって、
前記撮像装置(200)から送信された画像をカメラコントロール画面(500)に表示するように制御する表示制御手段(105)と、
前記カメラコントロール画面(500)に表示されている所定領域と、ポインティングデバイス(106a)を用いて操作されるマウスカーソル(600)とが重なっているか否かを判定する第1の判定手段(101)と、
前記所定領域と前記マウスカーソル(600)とが重なっている場合、撮影準備処理を前記撮像装置に行わせるコマンド(700)を前記撮像装置(200)に送信する第1の指示手段(101)と、
前記所定領域と前記マウスカーソル(600)とが重なっている場合に、前記ポインティングデバイス(106a)がクリックされた否かを判定する第2の判定手段(101)と、
前記ポインティングデバイス(106a)がクリックされた場合、前記撮影処理を前記撮像装置(200)に行わせるコマンド(700)を前記撮像装置(200)に送信する第2の指示手段(101)と、
を有することを特徴とする制御装置。
【請求項2】
前記制御装置に加え、
第1のゴミ位置情報(400)として、白紙を撮影することで検出されたゴミ補正データ(400)を保持する撮像装置において、
撮影画像撮影時に第1のゴミ補正データ(400)を情報として付加するカメラにおいて、
第2のゴミ補正データ(400)として、PCにて第1のゴミ補正データ(400)により画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、
第2のゴミ補正データ(400)をカメラに入力すると、第1と第2のゴミ補正データ(400)を画像に付加することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)により画像からゴミを取り除いた効果を確認できるビュー領域(501)を1つ持つことを特徴とする請求項2に記載の制御装置。
【請求項4】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)により画像からゴミを取り除いた効果を確認できるビュー領域(511)、ビュー領域(512)、ビュー領域(513)、ビュー領域(514)をそれぞれ持つことを特徴とする請求項2に記載の制御装置。
【請求項5】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)のゴミのパラメータが、閾値以上になった場合に、アラートを表示することを特徴とする請求項1乃至請求項4の何れか1項に記載の制御装置。
【請求項6】
前記制御装置に加え、
ゴミのパラメータは、個数であることを特徴とする請求項5に記載の制御装置。
【請求項7】
前記制御装置に加え、
ゴミのパラメータは、面積であることを特徴とする請求項5に記載の制御装置。
【請求項1】
撮像装置(200)を遠隔制御する制御装置(100)であって、
前記撮像装置(200)から送信された画像をカメラコントロール画面(500)に表示するように制御する表示制御手段(105)と、
前記カメラコントロール画面(500)に表示されている所定領域と、ポインティングデバイス(106a)を用いて操作されるマウスカーソル(600)とが重なっているか否かを判定する第1の判定手段(101)と、
前記所定領域と前記マウスカーソル(600)とが重なっている場合、撮影準備処理を前記撮像装置に行わせるコマンド(700)を前記撮像装置(200)に送信する第1の指示手段(101)と、
前記所定領域と前記マウスカーソル(600)とが重なっている場合に、前記ポインティングデバイス(106a)がクリックされた否かを判定する第2の判定手段(101)と、
前記ポインティングデバイス(106a)がクリックされた場合、前記撮影処理を前記撮像装置(200)に行わせるコマンド(700)を前記撮像装置(200)に送信する第2の指示手段(101)と、
を有することを特徴とする制御装置。
【請求項2】
前記制御装置に加え、
第1のゴミ位置情報(400)として、白紙を撮影することで検出されたゴミ補正データ(400)を保持する撮像装置において、
撮影画像撮影時に第1のゴミ補正データ(400)を情報として付加するカメラにおいて、
第2のゴミ補正データ(400)として、PCにて第1のゴミ補正データ(400)により画像からゴミを取り除いた後で再度画像をスキャンして残りのゴミ位置情報を取得し、
第2のゴミ補正データ(400)をカメラに入力すると、第1と第2のゴミ補正データ(400)を画像に付加することを特徴とする請求項1に記載の制御装置。
【請求項3】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)により画像からゴミを取り除いた効果を確認できるビュー領域(501)を1つ持つことを特徴とする請求項2に記載の制御装置。
【請求項4】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)により画像からゴミを取り除いた効果を確認できるビュー領域(511)、ビュー領域(512)、ビュー領域(513)、ビュー領域(514)をそれぞれ持つことを特徴とする請求項2に記載の制御装置。
【請求項5】
前記制御装置に加え、
第1のゴミ位置情報(400)、第2のゴミ補正データ(400)のゴミのパラメータが、閾値以上になった場合に、アラートを表示することを特徴とする請求項1乃至請求項4の何れか1項に記載の制御装置。
【請求項6】
前記制御装置に加え、
ゴミのパラメータは、個数であることを特徴とする請求項5に記載の制御装置。
【請求項7】
前記制御装置に加え、
ゴミのパラメータは、面積であることを特徴とする請求項5に記載の制御装置。
【図1】


【図2】
【図3(a)】
【図3(b)】
【図3(c)】
【図4(a)】
【図4(b)】
【図5(a)】
【図5(b)】
【図5(c)】
【図6(a)】
【図6(b)】
【図7】
【図8】
【図9(a)】
【図9(b)】
【図2】
【図3(a)】
【図3(b)】
【図3(c)】
【図4(a)】
【図4(b)】
【図5(a)】
【図5(b)】
【図5(c)】
【図6(a)】
【図6(b)】
【図7】
【図8】
【図9(a)】
【図9(b)】
【公開番号】特開2012−156884(P2012−156884A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−15600(P2011−15600)
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月27日(2011.1.27)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]