
制御装置
【課題】冷却効率を向上させつつ小型化することができる制御装置を提供する。
【解決手段】制御装置1は、3つの仕切壁110〜130を少なくとも有し、仕切壁110〜130により貫通するダクトDが形成されるとともに、外部から遮蔽された収容空間Sを形成する筐体100と、収容空間S内で上仕切壁110に接して配置され、移動機械を制御するための演算処理を実行するCPU基板20と、収容空間S内で下仕切壁120に接して配置され、移動機械を駆動するための電力を制御するモータドライバ30と、収容空間S内で後仕切壁130に接して配置され、CPU基板20およびモータドライバ30に電力を供給するバッテリ40と、ダクトD内に配置され、仕切壁110〜130を介してCPU基板20、モータドライバ30およびバッテリ40からの熱が伝達されるフィン50と、ダクトD内に気体の流れを形成してフィン50を冷却するファン60とを備える。
【解決手段】制御装置1は、3つの仕切壁110〜130を少なくとも有し、仕切壁110〜130により貫通するダクトDが形成されるとともに、外部から遮蔽された収容空間Sを形成する筐体100と、収容空間S内で上仕切壁110に接して配置され、移動機械を制御するための演算処理を実行するCPU基板20と、収容空間S内で下仕切壁120に接して配置され、移動機械を駆動するための電力を制御するモータドライバ30と、収容空間S内で後仕切壁130に接して配置され、CPU基板20およびモータドライバ30に電力を供給するバッテリ40と、ダクトD内に配置され、仕切壁110〜130を介してCPU基板20、モータドライバ30およびバッテリ40からの熱が伝達されるフィン50と、ダクトD内に気体の流れを形成してフィン50を冷却するファン60とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動機械に備えられる制御装置に関する。
【背景技術】
【0002】
従来、パッケージや電源などの電気部品が配置される発熱部ケースと、発熱部ケースの一側方に隣接して設けられた冷却用ダクト部と、一端が電気部品に接続され、他端が冷却用ダクト部内に露出して電気部品の発熱を冷却ダクト部内に放熱する熱伝導手段とを具備した電子機器の冷却構造が知られている(特許文献1参照)。このような冷却構造によれば、発熱部ケース内への異物の進入を防止することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−071250号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、冷却構造を備えるユニットを作業用ロボットなどの移動機械に搭載することについて考慮されていなかった。すなわち、移動機械においては、冷却構造を備えるユニットを配置するためのスペースが限られるため、ユニット(制御装置)は冷却効率を向上させつつ小型化することが求められる。
【0005】
そこで、本発明は、冷却効率を向上させつつ小型化することができる制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記した目的を達成するための本発明は、移動機械に備えられる制御装置であって、第1、第2および第3の3つの仕切壁を少なくとも有し、前記仕切壁により貫通するダクトが形成されるとともに、外部から遮蔽された収容空間を形成する筐体と、前記収容空間内で前記第1の仕切壁に接して配置され、前記移動機械を制御するための演算処理を実行する演算処理装置と、前記収容空間内で前記第2の仕切壁に接して配置され、前記移動機械を駆動するための電力を制御する電力制御装置と、前記収容空間内で前記第3の仕切壁に接して配置され、前記演算処理装置および前記電力制御装置に電力を供給する電源装置と、前記ダクト内に配置され、前記第1から第3の仕切壁を介して前記演算処理装置、前記電力制御装置および前記電源装置からの熱が伝達される放熱部材と、前記ダクト内に気体の流れを形成して前記放熱部材を冷却するファンとを備えたことを特徴とする。
【0007】
このような構成によれば、演算処理装置、電力制御装置および電源装置が、それぞれ、ダクトを形成する第1、第2または第3の仕切壁に接して配置されることで、演算処理装置、電力制御装置および電源装置からの熱をダクトの1つの壁を通してだけでなく、少なくとも3つの壁を通して広い面積でダクト内に伝えることができるので、冷却効率を向上させることができる。さらに、演算処理装置、電力制御装置および電源装置がダクトを取り囲むように配置されることになるので、ダクトの一側方で電気部品が並べて配置される構成と比較して、ユニットを小型化することができる。
【0008】
前記した制御装置において、前記放熱部材は、フィンであり、前記第1から第3の仕切壁のそれぞれから直交して延出している構成とすることができる。
【0009】
このような構成によれば、冷却気体の通路を確保しつつ、ダクト中央までの熱の伝達径路を短くすることができるので、冷却効率をさらに向上させることができる。
【0010】
また、本発明の制御装置において、前記放熱部材は、フィンであり、前記第1および第2の仕切壁のそれぞれから直交して延出しており、前記第1の仕切壁から延出するフィンと前記第2の仕切壁から延出するフィンは、それぞれ複数設けられ、交互に配置されている構成とすることができる。
【0011】
このような構成によれば、第1の仕切壁から延出する各フィンの間の間隔や、第2の仕切壁から延出する各フィンの間の間隔を広めに形成できるので、フィンを比較的容易に製造することができる。また、フィンが複数設けられているので、冷却効率をさらに向上させることができる。
【0012】
前記した各制御装置において、前記ダクトは、矩形断面に形成され、前記演算処理装置と前記電力制御装置は、前記ダクトを挟んで対向して配置される構成とすることができる。
【0013】
このような構成によれば、演算処理装置に接続される制御用配線と電力制御装置に接続される電力供給用配線とを筐体から別個に引き出す構成が容易となるので、筐体の内外における各配線の取り回し性を向上させることができる。また、制御用配線と電力供給用配線とを離した状態で筐体から引き出すことが可能となるので、電力供給用配線から出るノイズが制御用配線に影響を及ぼすことを抑制することができる。
【0014】
前記した各制御装置において、前記電源装置は、バッテリであり、前記移動機械に備えられた状態における前記ダクトの側方または下方に配置される構成とすることができる。
【0015】
一般に、電源装置としてのバッテリは、演算処理装置などと比べて重量があるので、移動機械に備えられた状態におけるダクトの上方に配置する場合、筐体を補強する必要が生じる可能性があり、これによって、筐体の構造が複雑化したり、筐体が大型化したりするおそれがある。そこで、バッテリを移動機械に備えられた状態におけるダクトの側方または下方に配置することで、補強構造を簡略化または不要とすることができるので、筐体の構造の簡略化や、筐体、すなわちユニットのさらなる小型化が可能となる。
【0016】
前記した各制御装置において、前記収容空間を形成する壁は、電磁波遮蔽機能を有する構成とすることができる。
【0017】
このような構成によれば、収容空間内への電磁波の進入、および、収容空間外(筐体の外部)への電磁波の放出を抑制することができる。
【発明の効果】
【0018】
本発明の制御装置によれば、演算処理装置、電力制御装置および電源装置が、それぞれ、ダクトを形成する第1、第2または第3の仕切壁に接して配置されていることで、冷却効率を向上させつつ小型化することができる。
【図面の簡単な説明】
【0019】
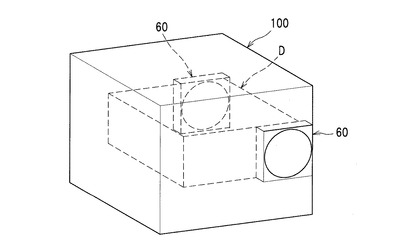
【図1】実施形態に係る制御装置の斜視図である。
【図2】実施形態に係る制御装置の内部構造を示す斜視図である。
【図3】実施形態に係る制御装置の断面図である。
【図4】実施形態に係る制御装置を右斜め前方から見た斜視図である。
【図5】第1変形例に係る制御装置の断面図(a)と、第2変形例に係る制御装置の断面図(b)である。
【図6】第3変形例に係る制御装置の断面図である。
【図7】第4変形例に係る制御装置の斜視図である。
【図8】第5変形例に係る制御装置の斜視図である。
【発明を実施するための形態】
【0020】
次に、本発明の一実施形態について、適宜図面を参照しながら詳細に説明する。
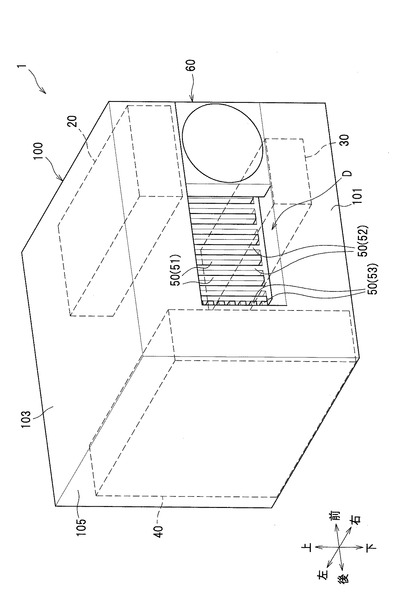
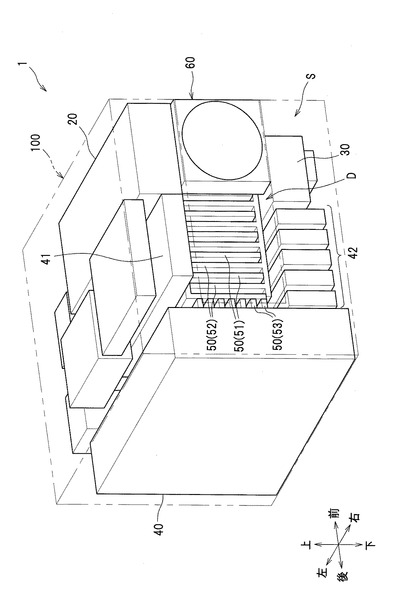
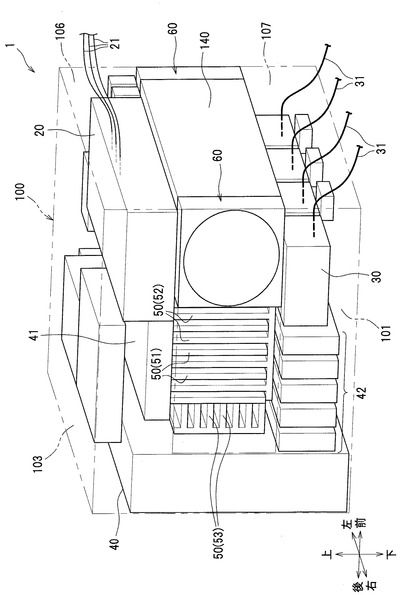
図1および図2に示すように、実施形態に係る制御装置1は、作業用ロボットや小型の重機(建設機械)などの移動機械に備えられる装置であり、筐体100と、演算処理装置の一例としてのCPU基板20と、電力制御装置の一例としてのモータドライバ30と、電源装置の一例としてのバッテリ40と、放熱部材の一例としてのフィン50と、ファン60とを主に備えている。
【0021】
ここで、以下の説明において、前後、左右および上下は、制御装置1が搭載される図示しない移動機械の前後、左右および上下を基準とする。言い換えると、以下の説明における前後、左右および上下は、制御装置1が移動機械に備えられたときの状態を基準としている。
【0022】
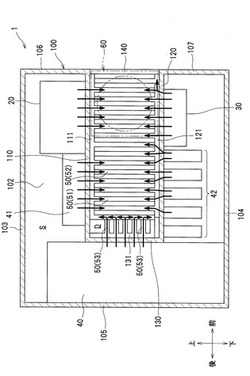
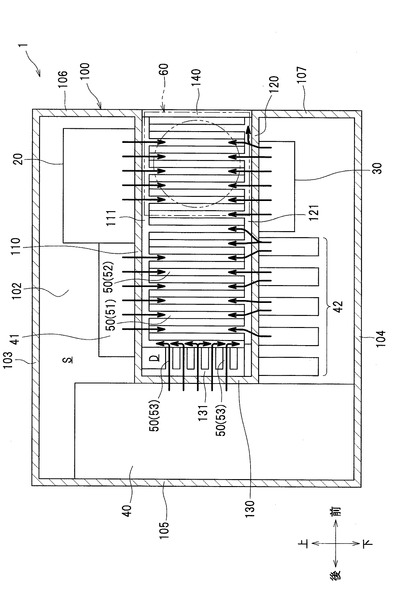
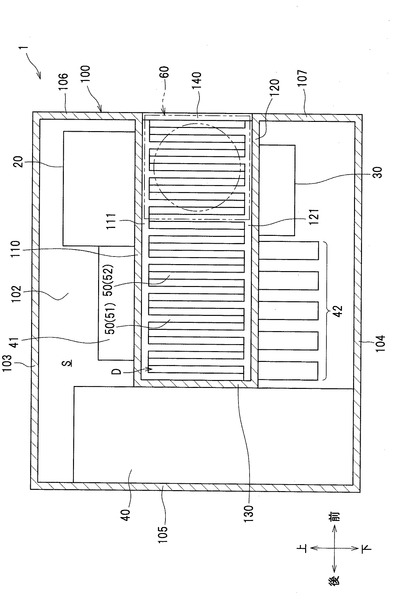
図3に示すように、筐体100は、左右方向において対向する側面視略U形状の右外壁101(図1参照)および左外壁102と、左右の外壁101,102の外側の上縁部、下縁部または後縁部をつなぐように延びる上外壁103、下外壁104および後外壁105と、左右の外壁101,102の前縁部をつなぐように延びる上前外壁106および下前外壁107と、左右の外壁101,102の内側の上縁部、下縁部または後縁部をつなぐように延びる3つの仕切壁110,120,130と、上下の仕切壁110,120の前端部の間に設けられ前仕切壁140とを有して構成されている。
【0023】
なお、本発明において、筐体100の形成方法(組立方法)は、特に限定されるものではない。例えば、各壁101〜107,110〜140を個別の部品として形成しておき、それらを溶接することなどによって筐体100を形成してもよいし、いくつかの壁が一体となった複数のパーツを予め用意しておき、それらを組み合わせることで筐体100を形成してもよい。
【0024】
このような筐体100は、CPU基板20やモータドライバ30、バッテリ40などが収容される収容空間Sと、フィン50やファン60などが配置されるダクトDとを形成している。
【0025】
収容空間Sは、左右、上下、後の外壁101〜105と、上下の前外壁106,107と、3つの仕切壁110〜130とにより形成された断面視略U形状の空間である。この収容空間Sは、各壁101〜107,110〜130により外部から遮蔽された密閉空間として形成されており、これによって、収容空間S内への粉塵や塵埃などの異物の進入が防止されている。その結果、収容空間S内に配置されたCPU基板20やモータドライバ30などへの異物の影響、例えば、回路のショートなどを防止することができるようになっている。
【0026】
ダクトDは、第1の仕切壁の一例としての上仕切壁110と、第2の仕切壁の一例としての下仕切壁120と、第3の仕切壁の一例としての後仕切壁130と、前仕切壁140とにより形成されている。さらに述べると、ダクトDは、4つの仕切壁110〜140により左右方向に貫通する断面視略矩形状に形成されている。
【0027】
本実施形態において、少なくとも、上仕切壁110、下仕切壁120および後仕切壁130は、収容空間S内で発生した熱をダクトD内(フィン50)に伝達することができるように、熱伝導性が良好な材料から形成されている。具体的には、筐体100の剛性やコスト面などを考慮して、各壁101〜107,110〜140は、金属板、例えば、熱伝導率が比較的高い種類の鋼板などから形成することができる。
【0028】
CPU基板20は、移動機械を制御するための演算処理を実行する装置である。具体的に、本実施形態においては、CPU基板20は、移動機械に設けられた図示しないカメラや照明などに接続され、カメラなどから得た情報に基づいて演算処理を実行し、その結果に基づいてモータドライバ30などを制御することで移動機械の動作を制御する。
【0029】
このようなCPU基板20は、収容空間S内のうち、ダクトDの上方で上仕切壁110の上面前寄りに接して配置されている。なお、本発明において、仕切壁に接して配置されるとは、CPU基板20などが仕切壁に直接接触した状態で配置される構成のほか、CPU基板20などが、例えば、熱伝導性が良好な弾性シートやグリスなどを介して仕切壁に間接的に接触した状態で配置される構成を含んでいる。
【0030】
図4に示すように、CPU基板20には、ハーネス21の一端が接続されており、このハーネス21は、上前外壁106を通して外部に引き出され、他端が移動機械に設けられた図示しないカメラや照明などに接続されている。
【0031】
モータドライバ30は、移動機械を駆動するための電力を制御する装置である。具体的に、本実施形態においては、モータドライバ30は、移動機械に設けられた、アクチュエータなどを駆動させるための図示しないモータに接続され、CPU基板20などからの信号に基づいてバッテリ40から供給された電力を所定の電圧に変換するなどしてモータを駆動する電力を制御する。
【0032】
このようなモータドライバ30は、図3に示すように、収容空間S内のうち、ダクトDの下方で下仕切壁120の下面の前寄りに接して配置されている。さらに述べると、本実施形態において、モータドライバ30と前記したCPU基板20とは、ダクトDを挟んで上下方向に対向して配置されている。
【0033】
図4に示すように、モータドライバ30には、ハーネス31の一端が接続されており、このハーネス31は、下前外壁107を通して外部に引き出され、他端が移動機械に設けられた図示しないモータに接続されている。
【0034】
本実施形態においては、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置されていることで、制御用のハーネス21と電力供給用のハーネス31とを筐体100から別個に引き出す構成が容易となっている。これにより、筐体100の内外におけるハーネス21,31の取り回し性を向上させることができる。また、ハーネス21,31を互いに離した状態で筐体100から引き出すことが可能となるので、電力供給用のハーネス31から出るノイズが制御用のハーネス21に影響を及ぼすことを抑制することができる。
【0035】
バッテリ40は、CPU基板20やモータドライバ30などに電力(直流電力)を供給する装置である。具体的に、本実施形態においては、バッテリ40からの電力は、制御電源装置41に供給され、CPU基板20を駆動させるための所定の電圧に変換された後にCPU基板20に供給される。また、バッテリ40からの電力は、駆動電源装置42に供給され、モータドライバ30を駆動させるための所定の電圧に変換された後にモータドライバ30に供給される。
【0036】
図3に示すように、バッテリ40は、収容空間S内のうち、ダクトDの後方で後仕切壁130の後面に接して配置されている。さらに述べると、バッテリ40は、収容空間S内の、後外壁105と後仕切壁130との間において、後外壁105に沿うように立てられた状態で、かつ、下外壁104上に載置されるように配置されている。
【0037】
ここで、バッテリ40は、CPU基板20などと比べて重量があるため、ダクトDの上方に配置する場合、筐体100を補強する必要が生じる可能性があり、その結果、筐体100の構造が複雑化したり、筐体100が大型化したりするおそれがある。本実施形態では、バッテリ40を、ダクトDの後方(側方)で下外壁104に載置するように配置することで、筐体100の補強構造を簡略化または不要とすることが可能となるので、筐体100の構造の簡略化や小型化が可能となる。
【0038】
なお、制御電源装置41は、収容空間S内のうち、ダクトDの上方で上仕切壁110の上面後寄りに接して配置されており、駆動電源装置42は、収容空間S内のうち、ダクトDの下方で下仕切壁120の下面後寄りに接して配置されている。
【0039】
フィン50は、仕切壁110〜130を介してCPU基板20やモータドライバ30、バッテリ40、制御電源装置41、駆動電源装置42などからの熱が伝達される部材であり、左右方向に延びる略矩形平板状に形成され、ダクトD内に配置されている。フィン50は、仕切壁110〜130のそれぞれから直交して延出している。
【0040】
より詳細に、本実施形態において、フィン51は、上仕切壁110の下面に接して配置された左右方向に延びる略矩形平板状の基部111と一体に形成され、基部111に対して直交するように基部111から下方に向けて延出している。フィン51は、側面視において櫛歯形状をなすように、前後方向に並んで複数設けられている。
【0041】
また、フィン52は、下仕切壁120の上面に接して配置された左右方向に延びる略矩形平板状の基部121と一体に形成され、基部121に対して直交するように基部121から上方に向けて延出している。フィン52は、側面視において櫛歯形状をなすように、前後方向に並んで複数設けられている。
【0042】
基部111(上仕切壁110)から延出するフィン51と基部121(下仕切壁120)から延出するフィン52は、櫛歯が噛み合うように交互に配置されている。これにより、各フィン51の間の間隔や各フィン52の間の間隔を広めに形成できるので、一体に形成される基部111とフィン51や、一体に形成される基部121とフィン52を比較的容易に製造することができるようになっている。
【0043】
フィン53は、後仕切壁130の前面に接して配置された左右方向に延びる略矩形平板状の基部131と一体に形成され、基部131に対して直交するように基部131から前方に向けて延出している。フィン53は、側面視において櫛歯形状をなすように、上下方向に並んで複数設けられている。
【0044】
本実施形態において、フィン51は、その先端(下端)が基部121に当接することで基部121に略密着して設けられ、フィン52は、その先端(上端)が基部111に当接することで基部111に略密着して設けられている。また、フィン53は、その先端(前端)が最も後方に配置されたフィン51に当接することで、当該フィン51に略密着して設けられている。
【0045】
このようなフィン50(およびフィン50と一体に形成された基部111〜131)は、高い熱伝導性を有する材料、例えば、アルミニウムや銅などから形成することができる。
【0046】
なお、フィン51の先端と基部121、フィン52の先端と基部111、および、フィン53の先端と最後方のフィン51との密着状態(接触面積)を確保するため、例えば、フィン50の先端と基部111,121などとの間には、熱伝導性が良好なグリスなどを塗っておいてもよい。
【0047】
また、フィン50の先端を、側面視において幅広に形成しておき、基部111,121などとの接触面積を大きくするようにしてもよい。さらに、寸法誤差を考慮して、フィン50の先端に、比較的容易に変形する突起を設けておいてもよい。これによれば、制御装置1の組立工程において、フィン50をダクトD内に配設するときに、突起は基部111,121などに当接することで変形するが、この突起により、フィン50と基部111,121などとの接触を確保することができる。
【0048】
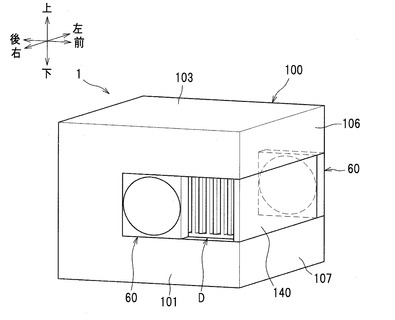
ファン60は、ダクトD内に空気(気体)の流れを形成してフィン50を冷却する装置であり、本実施形態においては、図4に示すように、トンネル状のダクトDの左右両方の開口部にそれぞれ1つずつ配置されている。なお、本実施形態において、各ファン60は、ダクトDの開口部のうち、前側に寄せて配置されている。これにより、ダクトD(フィン50)は、その一部(左右方向から見て後寄りの部分)が開放された構造となっている。
【0049】
左右2つのファン60のうち、一方は、外部の空気をダクトD内に取り込み、他方は、ダクトD内の空気を外部に排出するように取り付けられている。
【0050】
以上のように構成された制御装置1が搭載された移動機械が動作すると、CPU基板20やモータドライバ30、バッテリ40、制御電源装置41、駆動電源装置42などが駆動し、これらから熱が発生する。
【0051】
図3に示すように、CPU基板20や制御電源装置41などで発生した熱(矢印参照)は、上仕切壁110と基部111を介してフィン51や、基部111と略密着するフィン52に伝達され、フィン51,52の中央(ダクトDの中央)へ伝わっていく。また、モータドライバ30や駆動電源装置42などで発生した熱(矢印参照)は、下仕切壁120と基部121を介してフィン52や、基部121と略密着するフィン51に伝達され、ダクトDの中央へ伝わっていく。
【0052】
また、バッテリ40で発生した熱は、後仕切壁130と基部131を介してフィン53に伝達され、さらに最後方のフィン51に伝達されて、基部111,112を介してフィン51,52に伝わることで、徐々にダクトDの中央へ伝わっていく。
【0053】
そして、フィン51〜53(および基部111,121,131)は、ファン60によって形成される空気の流れによって冷却されることとなる。これにより、CPU基板20やモータドライバ30、バッテリ40などからの熱が、ダクトDの中央へ次々と伝わり、CPU基板20やモータドライバ30、バッテリ40などが冷却されることとなる。
【0054】
以上によれば、本実施形態において以下のような効果を得ることができる。
CPU基板20、モータドライバ30およびバッテリ40が、それぞれ、ダクトDを形成する仕切壁110〜130に接して配置されているので、CPU基板20、モータドライバ30およびバッテリ40からの熱をダクトDの1つの壁を通してだけでなく、3つの仕切壁110〜130を通して広い面積でダクトD内に伝えることができる。これにより、冷却効率を向上させることができる。
【0055】
また、CPU基板20、モータドライバ30およびバッテリ40が、ダクトDを取り囲むように配置されることになるので、例えば、ダクトDの一側方でCPU基板20、モータドライバ30およびバッテリ40が並べて配置される構成と比較して、制御装置1を小型化することができる。これにより、配置スペースが限られる移動機械に、制御装置1を好適に配設することができる。
【0056】
また、仕切壁110〜130のそれぞれから直交して延出するフィン50を備えているので、各フィン50の間に冷却気体である空気の通路を確保しつつ、ダクトDの中央までの熱の伝達径路を短くすることができる。これにより、冷却効率をさらに向上させることができる。
【0057】
また、フィン51とフィン52が交互に配置されているので、各フィン51の間の間隔や各フィン52の間の間隔を広めに形成することができる。これにより、一体に形成される基部111とフィン51や、一体に形成される基部121とフィン52を比較的容易に製造することができる。また、フィン51,52が複数設けられているので、冷却効率をさらに向上させることができる。
【0058】
また、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置されているので、筐体100の内外における各ハーネス21,31の取り回し性を向上させることができる。さらに、ハーネス21,31を離した状態で筐体100から引き出すことが可能となるので、ハーネス31から出るノイズがハーネス21に影響を及ぼすことを抑制することができる。
【0059】
また、重量のあるバッテリ40がダクトDの側方に配置されているので、筐体100の補強構造を簡略化または不要とすることができるため、筐体100の構造の簡略化や小型化が可能となる。そして、筐体100の小型化により、制御装置1のさらなる小型化が可能となる。
【0060】
以上に本発明の実施形態について説明したが、本発明は、前記した実施形態に限定されることなく、適宜変形して実施することができる。
例えば、収容空間Sを形成する壁101〜107,110〜130は、電波などの電磁波を遮蔽する電磁波遮蔽機能を有していてもよい。
【0061】
これによれば、収容空間内への電磁波の進入を抑制することができるので、収容空間内に配置された部品への電磁波の影響を抑制することができる。また、収容空間外(筐体の外部)への電磁波の放出を抑制することができるので、制御装置の周辺に配置された部品への電磁波の影響を抑制することができる。
【0062】
なお、収容空間を形成する壁に電磁波遮蔽機能を持たせる方法は、特に限定されるものではなく、例えば、壁自体を鉄や鉛などの電磁波遮蔽材料から形成したり、壁に薄いシート状に形成した電磁波遮蔽材料を貼り付けたり、壁に電磁波遮蔽材料を塗布したりすることなどにより電磁波遮蔽機能を持たせることができる。
【0063】
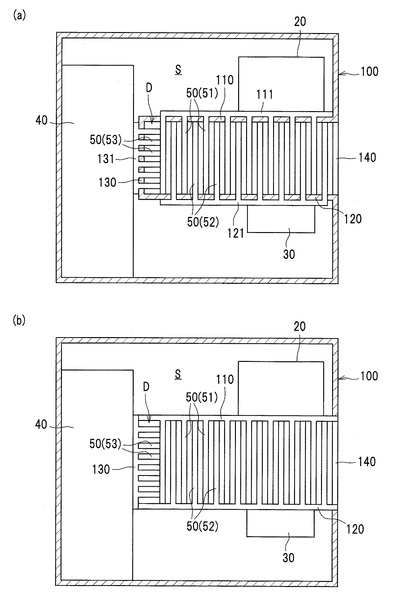
また、前記実施形態においては、フィン51〜53と一体に形成された基部111〜131が仕切壁110〜130のダクトD側の面に配置されていたが、図5(a)に示すように、基部111〜131は、収容空間S内でCPU基板20などと接して配置されていてもよい。この場合、フィン51〜53は、仕切壁110〜130を貫通してダクトD内に延出するように設けられることとなる。
【0064】
また、図5(b)に示すように、放熱部材としてのフィン51〜53は、仕切壁110〜130に直接設けられていてもよい。この場合、筐体100を形成する壁のうち、少なくとも、仕切壁110〜130は、フィン51〜53と同様に、高い熱伝導性を有する材料(アルミニウムや銅など)から形成されることが望ましい。
【0065】
図5(a),(b)に示すような変形例によれば、CPU基板20などで発生した熱を、直接的に、言い換えると、部材間の熱伝達を介さずに、フィン51〜53に伝導することができるので、冷却効率をより向上させることができる。
【0066】
前記実施形態においては、フィン50がすべての仕切壁110〜130から延出していたが、これに限定されず、例えば、フィンは、第1および第2の仕切壁だけから延出していてもよい。すなわち、図6に示すように、制御装置1は、後仕切壁130(第3の仕切壁)から延出するフィンを備えない構成であってもよい。
【0067】
前記実施形態においては、2つのファン60が、ダクトDの開口部のうちの前側に寄せて配置、すなわち、左右方向に向かい合って配置されていたが、これに限定されず、例えば、図7に示すように、2つのファン60は前後方向にずれて配置されていてもよい。より具体的に、左側のファン60は、ダクトDの開口部のうちの前側に寄せて配置され、右側のファン60は、ダクトDの開口部のうちの後側に寄せて配置されていてもよい。また、図示は省略するが、左側のファン60が、ダクトDの開口部のうちの後側に寄せて配置され、右側のファン60が、ダクトDの開口部のうちの前側に寄せて配置されていてもよい。
【0068】
なお、図7に示したような制御装置1が、例えば、前側(上下の前外壁106,107や前仕切壁140)を取付面として移動機械に取り付けられ、外部にむき出しとなるように配設される構成においては、前後方向にずれて配置された2つのファン60は、両方が外部の空気をダクトD内に取り込むように、または、両方がダクトD内の空気を外部に排出するように取り付けられているとよい。これによれば、2つのファン60で発生する気流により制御装置1にかかる推力は、略相殺されることになるので、移動機械(例えば、二足歩行ロボットなど)全体に対して不要な推力が作用することを抑制することができる。その結果、移動機械の安定性を向上させることが可能となる。
【0069】
また、逆に、ファンにより発生する推力によって移動機械を積極的に移動させるように構成してもよい。例えば、ダクトの貫通方向を移動機械の進行方向に向け、ファンで発生する気流を移動機械の進行方向後方に向けることで、移動機械を移動させるためのエネルギーを節約することができる。
【0070】
前記実施形態においては、ダクトDの一部が開放された構造となっていたが、これに限定されず、例えば、図8に示すように、ダクトDは、ファン60が取り付けられる部分以外が閉じられた構造となっていてもよい。なお、ダクトの一部が開放された構造においては、ダクトの開口部に金属製のメッシュなどを設けてもよい。これによれば、ダクト内への大きな異物の進入を抑制することができる。
【0071】
前記実施形態においては、ダクトDは左右方向に貫通して形成されていたが、これに限定されず、例えば、前後方向や上下方向に貫通して形成されていてもよい。なお、上下方向に貫通するダクトにおいて、冷却気体を下から上に向けて流すようにすれば、温かくなった気体が上方へ流れる性質と相まって、冷却効率をより向上させることができる。
【0072】
前記実施形態においては、放熱部材として、略矩形平板状に形成されたフィン50(51〜53)を例示したが、これに限定されず、例えば、各フィンは、棒状(針状)に形成されていてもよい。また、放熱部材は、フィンに限定されず、例えば、ダクトの貫通方向に沿って延びる金属製のハニカムコアなどであってもよい。
【0073】
前記実施形態においては、筐体100を鋼板などから形成することができると説明したが、筐体は、例えば、アルミニウム板などから形成することもできる。これによれば、筐体を形成する各外壁からも収容空間内で発生した熱を外部に逃がす構成が可能となる。この場合、例えば、図3を参考にして説明すると、CPU基板20と上外壁103の間や、モータドライバ30と下外壁104の間などに熱を伝導する部材を設けてもよい。なお、温かくなった気体が上方へ流れる性質を考慮すると、少なくとも上外壁103を高い熱伝導性を有する材料から形成することで、冷却性能を向上させることが可能となる。
【0074】
前記実施形態においては、制御装置1(図1参照)は、全体として略直方体形状に形成されていたが、制御装置の全体形状(外観形状)は、特定の形状に限定されるものではない。例えば、制御装置は、移動機械の配置スペースにあわせて、立方体形状に形成されていてもよいし、角錐台形状に形成されていてもよい。
【0075】
前記実施形態においては、バッテリ40がダクトDの後方(側方)に配置されていたが、これに限定されず、例えば、バッテリは、移動機械に備えられた状態におけるダクトの下方に配置されていてもよい。これによっても、筐体の補強構造を簡略化または不要とすることが可能となるので、筐体の構造の簡略化や、筐体(制御装置)の小型化が可能となる。
【0076】
なお、本発明において、バッテリの種類は特に限定されるものではない。したがって、バッテリは、一次電池であってもよいし、二次電池であってもよい。また、バッテリとして二次電池を採用する場合には、筐体の壁に、バッテリを充電するときに使用するコネクタなどを設けてもよい。
【0077】
前記実施形態においては、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置される構成において、CPU基板20が上に配置され、モータドライバ30が下に配置されていたが、これに限定されず、例えば、CPU基板20が下に配置され、モータドライバ30が上に配置されていてもよい。また、CPU基板20(またはモータドライバ30)とダクトDを挟んで対向して配置されるのは、バッテリ40(電源装置)であってもよい。
【0078】
前記実施形態においては、ファン60がダクトDの両方の開口部にそれぞれ1つずつ配置されていたが、これに限定されず、例えば、ファンは、複数並べて配置されていてもよい。また、ダクトの一方の開口部に配置されるファンの数と、ダクトの他方の開口部に配置されるファンの数とは、同じであってもよいし、異なっていてもよい。
【0079】
前記実施形態においては、ファン60がダクトDの両方の開口部(両側)にそれぞれ配置されていたが、これに限定されず、例えば、ファンは、ダクトの一方の開口部(片側)だけに配置されていてもよい。この場合、ファンは、1つだけ配置されていてもよいし、複数並べて配置されていてもよい。
【0080】
前記実施形態においては、制御装置1は、ファン60によりダクトD内に空気の流れが形成されるものであったが、これに限定されず、例えば、制御装置は、ファンによりダクト内に窒素ガスやヘリウムガス、アルゴンガスなどの不活性ガスの流れが形成されるものであってもよい。
【0081】
前記実施形態においては、ダクトDは、3つの仕切壁110〜130を介して収容空間Sと隣接していたが、これに限定されず、例えば、ダクトは、矩形断面をなす4つの仕切壁を介して収容空間と隣接していてもよい。言い換えると、ダクトは、収容空間に取り囲まれるように設けられていてもよい。これによれば、演算処理装置、電力制御装置およびバッテリ(電源装置)のほか、収容空間内で4つめの仕切壁に接して配置した装置も効率的に冷却することができる。
【0082】
なお、ダクトを形成する仕切壁(収容空間とダクトを仕切る仕切壁)は、上記したように3つや4つに限定されず、5つ以上であってもよい。また、ダクトの断面形状は、矩形状に限定されず、例えば、五角形状をなしていてもよいし、六角形状をなしていてもよい。さらに、ダクトは、筐体内で一方向に沿って真っ直ぐ延びるトンネル状に限定されず、筐体内で屈曲していてもよい。
【0083】
前記実施形態においては、演算処理装置としてのCPU基板20が、モータドライバ30などを制御することで移動機械を制御するものであったが、これに限定されず、例えば、演算処理装置は、移動機械の各部を直接制御するものであってもよい。
【0084】
前記実施形態においては、電力制御装置としてモータドライバ30を例示したが、これに限定されず、例えば、電力制御装置は、バッテリ(電源装置)から供給された電力を1種類または複数種類の所定の電圧に変換して移動機械の各部を駆動する電力を制御する装置であってもよい。
【0085】
前記実施形態においては、電源装置として、直流電力を供給するバッテリ40を例示したが、これに限定されず、例えば、電源装置は、直流電力を供給するバッテリ以外の電源装置であってもよい。具体的には、外部から入力された電力(直流電力または交流電力)を所定の電圧に変換して演算処理装置や電力制御装置に供給する、電源基板やトランスなどであってもよい。
【符号の説明】
【0086】
1 制御装置
20 CPU基板
30 モータドライバ
40 バッテリ
50 フィン
51 フィン
52 フィン
53 フィン
60 ファン
100 筐体
101 右外壁
102 左外壁
103 上外壁
104 下外壁
105 後外壁
106 上前外壁
107 下前外壁
110 上仕切壁
120 下仕切壁
130 後仕切壁
D ダクト
S 収容空間
【技術分野】
【0001】
本発明は、移動機械に備えられる制御装置に関する。
【背景技術】
【0002】
従来、パッケージや電源などの電気部品が配置される発熱部ケースと、発熱部ケースの一側方に隣接して設けられた冷却用ダクト部と、一端が電気部品に接続され、他端が冷却用ダクト部内に露出して電気部品の発熱を冷却ダクト部内に放熱する熱伝導手段とを具備した電子機器の冷却構造が知られている(特許文献1参照)。このような冷却構造によれば、発熱部ケース内への異物の進入を防止することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−071250号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、冷却構造を備えるユニットを作業用ロボットなどの移動機械に搭載することについて考慮されていなかった。すなわち、移動機械においては、冷却構造を備えるユニットを配置するためのスペースが限られるため、ユニット(制御装置)は冷却効率を向上させつつ小型化することが求められる。
【0005】
そこで、本発明は、冷却効率を向上させつつ小型化することができる制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記した目的を達成するための本発明は、移動機械に備えられる制御装置であって、第1、第2および第3の3つの仕切壁を少なくとも有し、前記仕切壁により貫通するダクトが形成されるとともに、外部から遮蔽された収容空間を形成する筐体と、前記収容空間内で前記第1の仕切壁に接して配置され、前記移動機械を制御するための演算処理を実行する演算処理装置と、前記収容空間内で前記第2の仕切壁に接して配置され、前記移動機械を駆動するための電力を制御する電力制御装置と、前記収容空間内で前記第3の仕切壁に接して配置され、前記演算処理装置および前記電力制御装置に電力を供給する電源装置と、前記ダクト内に配置され、前記第1から第3の仕切壁を介して前記演算処理装置、前記電力制御装置および前記電源装置からの熱が伝達される放熱部材と、前記ダクト内に気体の流れを形成して前記放熱部材を冷却するファンとを備えたことを特徴とする。
【0007】
このような構成によれば、演算処理装置、電力制御装置および電源装置が、それぞれ、ダクトを形成する第1、第2または第3の仕切壁に接して配置されることで、演算処理装置、電力制御装置および電源装置からの熱をダクトの1つの壁を通してだけでなく、少なくとも3つの壁を通して広い面積でダクト内に伝えることができるので、冷却効率を向上させることができる。さらに、演算処理装置、電力制御装置および電源装置がダクトを取り囲むように配置されることになるので、ダクトの一側方で電気部品が並べて配置される構成と比較して、ユニットを小型化することができる。
【0008】
前記した制御装置において、前記放熱部材は、フィンであり、前記第1から第3の仕切壁のそれぞれから直交して延出している構成とすることができる。
【0009】
このような構成によれば、冷却気体の通路を確保しつつ、ダクト中央までの熱の伝達径路を短くすることができるので、冷却効率をさらに向上させることができる。
【0010】
また、本発明の制御装置において、前記放熱部材は、フィンであり、前記第1および第2の仕切壁のそれぞれから直交して延出しており、前記第1の仕切壁から延出するフィンと前記第2の仕切壁から延出するフィンは、それぞれ複数設けられ、交互に配置されている構成とすることができる。
【0011】
このような構成によれば、第1の仕切壁から延出する各フィンの間の間隔や、第2の仕切壁から延出する各フィンの間の間隔を広めに形成できるので、フィンを比較的容易に製造することができる。また、フィンが複数設けられているので、冷却効率をさらに向上させることができる。
【0012】
前記した各制御装置において、前記ダクトは、矩形断面に形成され、前記演算処理装置と前記電力制御装置は、前記ダクトを挟んで対向して配置される構成とすることができる。
【0013】
このような構成によれば、演算処理装置に接続される制御用配線と電力制御装置に接続される電力供給用配線とを筐体から別個に引き出す構成が容易となるので、筐体の内外における各配線の取り回し性を向上させることができる。また、制御用配線と電力供給用配線とを離した状態で筐体から引き出すことが可能となるので、電力供給用配線から出るノイズが制御用配線に影響を及ぼすことを抑制することができる。
【0014】
前記した各制御装置において、前記電源装置は、バッテリであり、前記移動機械に備えられた状態における前記ダクトの側方または下方に配置される構成とすることができる。
【0015】
一般に、電源装置としてのバッテリは、演算処理装置などと比べて重量があるので、移動機械に備えられた状態におけるダクトの上方に配置する場合、筐体を補強する必要が生じる可能性があり、これによって、筐体の構造が複雑化したり、筐体が大型化したりするおそれがある。そこで、バッテリを移動機械に備えられた状態におけるダクトの側方または下方に配置することで、補強構造を簡略化または不要とすることができるので、筐体の構造の簡略化や、筐体、すなわちユニットのさらなる小型化が可能となる。
【0016】
前記した各制御装置において、前記収容空間を形成する壁は、電磁波遮蔽機能を有する構成とすることができる。
【0017】
このような構成によれば、収容空間内への電磁波の進入、および、収容空間外(筐体の外部)への電磁波の放出を抑制することができる。
【発明の効果】
【0018】
本発明の制御装置によれば、演算処理装置、電力制御装置および電源装置が、それぞれ、ダクトを形成する第1、第2または第3の仕切壁に接して配置されていることで、冷却効率を向上させつつ小型化することができる。
【図面の簡単な説明】
【0019】
【図1】実施形態に係る制御装置の斜視図である。
【図2】実施形態に係る制御装置の内部構造を示す斜視図である。
【図3】実施形態に係る制御装置の断面図である。
【図4】実施形態に係る制御装置を右斜め前方から見た斜視図である。
【図5】第1変形例に係る制御装置の断面図(a)と、第2変形例に係る制御装置の断面図(b)である。
【図6】第3変形例に係る制御装置の断面図である。
【図7】第4変形例に係る制御装置の斜視図である。
【図8】第5変形例に係る制御装置の斜視図である。
【発明を実施するための形態】
【0020】
次に、本発明の一実施形態について、適宜図面を参照しながら詳細に説明する。
図1および図2に示すように、実施形態に係る制御装置1は、作業用ロボットや小型の重機(建設機械)などの移動機械に備えられる装置であり、筐体100と、演算処理装置の一例としてのCPU基板20と、電力制御装置の一例としてのモータドライバ30と、電源装置の一例としてのバッテリ40と、放熱部材の一例としてのフィン50と、ファン60とを主に備えている。
【0021】
ここで、以下の説明において、前後、左右および上下は、制御装置1が搭載される図示しない移動機械の前後、左右および上下を基準とする。言い換えると、以下の説明における前後、左右および上下は、制御装置1が移動機械に備えられたときの状態を基準としている。
【0022】
図3に示すように、筐体100は、左右方向において対向する側面視略U形状の右外壁101(図1参照)および左外壁102と、左右の外壁101,102の外側の上縁部、下縁部または後縁部をつなぐように延びる上外壁103、下外壁104および後外壁105と、左右の外壁101,102の前縁部をつなぐように延びる上前外壁106および下前外壁107と、左右の外壁101,102の内側の上縁部、下縁部または後縁部をつなぐように延びる3つの仕切壁110,120,130と、上下の仕切壁110,120の前端部の間に設けられ前仕切壁140とを有して構成されている。
【0023】
なお、本発明において、筐体100の形成方法(組立方法)は、特に限定されるものではない。例えば、各壁101〜107,110〜140を個別の部品として形成しておき、それらを溶接することなどによって筐体100を形成してもよいし、いくつかの壁が一体となった複数のパーツを予め用意しておき、それらを組み合わせることで筐体100を形成してもよい。
【0024】
このような筐体100は、CPU基板20やモータドライバ30、バッテリ40などが収容される収容空間Sと、フィン50やファン60などが配置されるダクトDとを形成している。
【0025】
収容空間Sは、左右、上下、後の外壁101〜105と、上下の前外壁106,107と、3つの仕切壁110〜130とにより形成された断面視略U形状の空間である。この収容空間Sは、各壁101〜107,110〜130により外部から遮蔽された密閉空間として形成されており、これによって、収容空間S内への粉塵や塵埃などの異物の進入が防止されている。その結果、収容空間S内に配置されたCPU基板20やモータドライバ30などへの異物の影響、例えば、回路のショートなどを防止することができるようになっている。
【0026】
ダクトDは、第1の仕切壁の一例としての上仕切壁110と、第2の仕切壁の一例としての下仕切壁120と、第3の仕切壁の一例としての後仕切壁130と、前仕切壁140とにより形成されている。さらに述べると、ダクトDは、4つの仕切壁110〜140により左右方向に貫通する断面視略矩形状に形成されている。
【0027】
本実施形態において、少なくとも、上仕切壁110、下仕切壁120および後仕切壁130は、収容空間S内で発生した熱をダクトD内(フィン50)に伝達することができるように、熱伝導性が良好な材料から形成されている。具体的には、筐体100の剛性やコスト面などを考慮して、各壁101〜107,110〜140は、金属板、例えば、熱伝導率が比較的高い種類の鋼板などから形成することができる。
【0028】
CPU基板20は、移動機械を制御するための演算処理を実行する装置である。具体的に、本実施形態においては、CPU基板20は、移動機械に設けられた図示しないカメラや照明などに接続され、カメラなどから得た情報に基づいて演算処理を実行し、その結果に基づいてモータドライバ30などを制御することで移動機械の動作を制御する。
【0029】
このようなCPU基板20は、収容空間S内のうち、ダクトDの上方で上仕切壁110の上面前寄りに接して配置されている。なお、本発明において、仕切壁に接して配置されるとは、CPU基板20などが仕切壁に直接接触した状態で配置される構成のほか、CPU基板20などが、例えば、熱伝導性が良好な弾性シートやグリスなどを介して仕切壁に間接的に接触した状態で配置される構成を含んでいる。
【0030】
図4に示すように、CPU基板20には、ハーネス21の一端が接続されており、このハーネス21は、上前外壁106を通して外部に引き出され、他端が移動機械に設けられた図示しないカメラや照明などに接続されている。
【0031】
モータドライバ30は、移動機械を駆動するための電力を制御する装置である。具体的に、本実施形態においては、モータドライバ30は、移動機械に設けられた、アクチュエータなどを駆動させるための図示しないモータに接続され、CPU基板20などからの信号に基づいてバッテリ40から供給された電力を所定の電圧に変換するなどしてモータを駆動する電力を制御する。
【0032】
このようなモータドライバ30は、図3に示すように、収容空間S内のうち、ダクトDの下方で下仕切壁120の下面の前寄りに接して配置されている。さらに述べると、本実施形態において、モータドライバ30と前記したCPU基板20とは、ダクトDを挟んで上下方向に対向して配置されている。
【0033】
図4に示すように、モータドライバ30には、ハーネス31の一端が接続されており、このハーネス31は、下前外壁107を通して外部に引き出され、他端が移動機械に設けられた図示しないモータに接続されている。
【0034】
本実施形態においては、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置されていることで、制御用のハーネス21と電力供給用のハーネス31とを筐体100から別個に引き出す構成が容易となっている。これにより、筐体100の内外におけるハーネス21,31の取り回し性を向上させることができる。また、ハーネス21,31を互いに離した状態で筐体100から引き出すことが可能となるので、電力供給用のハーネス31から出るノイズが制御用のハーネス21に影響を及ぼすことを抑制することができる。
【0035】
バッテリ40は、CPU基板20やモータドライバ30などに電力(直流電力)を供給する装置である。具体的に、本実施形態においては、バッテリ40からの電力は、制御電源装置41に供給され、CPU基板20を駆動させるための所定の電圧に変換された後にCPU基板20に供給される。また、バッテリ40からの電力は、駆動電源装置42に供給され、モータドライバ30を駆動させるための所定の電圧に変換された後にモータドライバ30に供給される。
【0036】
図3に示すように、バッテリ40は、収容空間S内のうち、ダクトDの後方で後仕切壁130の後面に接して配置されている。さらに述べると、バッテリ40は、収容空間S内の、後外壁105と後仕切壁130との間において、後外壁105に沿うように立てられた状態で、かつ、下外壁104上に載置されるように配置されている。
【0037】
ここで、バッテリ40は、CPU基板20などと比べて重量があるため、ダクトDの上方に配置する場合、筐体100を補強する必要が生じる可能性があり、その結果、筐体100の構造が複雑化したり、筐体100が大型化したりするおそれがある。本実施形態では、バッテリ40を、ダクトDの後方(側方)で下外壁104に載置するように配置することで、筐体100の補強構造を簡略化または不要とすることが可能となるので、筐体100の構造の簡略化や小型化が可能となる。
【0038】
なお、制御電源装置41は、収容空間S内のうち、ダクトDの上方で上仕切壁110の上面後寄りに接して配置されており、駆動電源装置42は、収容空間S内のうち、ダクトDの下方で下仕切壁120の下面後寄りに接して配置されている。
【0039】
フィン50は、仕切壁110〜130を介してCPU基板20やモータドライバ30、バッテリ40、制御電源装置41、駆動電源装置42などからの熱が伝達される部材であり、左右方向に延びる略矩形平板状に形成され、ダクトD内に配置されている。フィン50は、仕切壁110〜130のそれぞれから直交して延出している。
【0040】
より詳細に、本実施形態において、フィン51は、上仕切壁110の下面に接して配置された左右方向に延びる略矩形平板状の基部111と一体に形成され、基部111に対して直交するように基部111から下方に向けて延出している。フィン51は、側面視において櫛歯形状をなすように、前後方向に並んで複数設けられている。
【0041】
また、フィン52は、下仕切壁120の上面に接して配置された左右方向に延びる略矩形平板状の基部121と一体に形成され、基部121に対して直交するように基部121から上方に向けて延出している。フィン52は、側面視において櫛歯形状をなすように、前後方向に並んで複数設けられている。
【0042】
基部111(上仕切壁110)から延出するフィン51と基部121(下仕切壁120)から延出するフィン52は、櫛歯が噛み合うように交互に配置されている。これにより、各フィン51の間の間隔や各フィン52の間の間隔を広めに形成できるので、一体に形成される基部111とフィン51や、一体に形成される基部121とフィン52を比較的容易に製造することができるようになっている。
【0043】
フィン53は、後仕切壁130の前面に接して配置された左右方向に延びる略矩形平板状の基部131と一体に形成され、基部131に対して直交するように基部131から前方に向けて延出している。フィン53は、側面視において櫛歯形状をなすように、上下方向に並んで複数設けられている。
【0044】
本実施形態において、フィン51は、その先端(下端)が基部121に当接することで基部121に略密着して設けられ、フィン52は、その先端(上端)が基部111に当接することで基部111に略密着して設けられている。また、フィン53は、その先端(前端)が最も後方に配置されたフィン51に当接することで、当該フィン51に略密着して設けられている。
【0045】
このようなフィン50(およびフィン50と一体に形成された基部111〜131)は、高い熱伝導性を有する材料、例えば、アルミニウムや銅などから形成することができる。
【0046】
なお、フィン51の先端と基部121、フィン52の先端と基部111、および、フィン53の先端と最後方のフィン51との密着状態(接触面積)を確保するため、例えば、フィン50の先端と基部111,121などとの間には、熱伝導性が良好なグリスなどを塗っておいてもよい。
【0047】
また、フィン50の先端を、側面視において幅広に形成しておき、基部111,121などとの接触面積を大きくするようにしてもよい。さらに、寸法誤差を考慮して、フィン50の先端に、比較的容易に変形する突起を設けておいてもよい。これによれば、制御装置1の組立工程において、フィン50をダクトD内に配設するときに、突起は基部111,121などに当接することで変形するが、この突起により、フィン50と基部111,121などとの接触を確保することができる。
【0048】
ファン60は、ダクトD内に空気(気体)の流れを形成してフィン50を冷却する装置であり、本実施形態においては、図4に示すように、トンネル状のダクトDの左右両方の開口部にそれぞれ1つずつ配置されている。なお、本実施形態において、各ファン60は、ダクトDの開口部のうち、前側に寄せて配置されている。これにより、ダクトD(フィン50)は、その一部(左右方向から見て後寄りの部分)が開放された構造となっている。
【0049】
左右2つのファン60のうち、一方は、外部の空気をダクトD内に取り込み、他方は、ダクトD内の空気を外部に排出するように取り付けられている。
【0050】
以上のように構成された制御装置1が搭載された移動機械が動作すると、CPU基板20やモータドライバ30、バッテリ40、制御電源装置41、駆動電源装置42などが駆動し、これらから熱が発生する。
【0051】
図3に示すように、CPU基板20や制御電源装置41などで発生した熱(矢印参照)は、上仕切壁110と基部111を介してフィン51や、基部111と略密着するフィン52に伝達され、フィン51,52の中央(ダクトDの中央)へ伝わっていく。また、モータドライバ30や駆動電源装置42などで発生した熱(矢印参照)は、下仕切壁120と基部121を介してフィン52や、基部121と略密着するフィン51に伝達され、ダクトDの中央へ伝わっていく。
【0052】
また、バッテリ40で発生した熱は、後仕切壁130と基部131を介してフィン53に伝達され、さらに最後方のフィン51に伝達されて、基部111,112を介してフィン51,52に伝わることで、徐々にダクトDの中央へ伝わっていく。
【0053】
そして、フィン51〜53(および基部111,121,131)は、ファン60によって形成される空気の流れによって冷却されることとなる。これにより、CPU基板20やモータドライバ30、バッテリ40などからの熱が、ダクトDの中央へ次々と伝わり、CPU基板20やモータドライバ30、バッテリ40などが冷却されることとなる。
【0054】
以上によれば、本実施形態において以下のような効果を得ることができる。
CPU基板20、モータドライバ30およびバッテリ40が、それぞれ、ダクトDを形成する仕切壁110〜130に接して配置されているので、CPU基板20、モータドライバ30およびバッテリ40からの熱をダクトDの1つの壁を通してだけでなく、3つの仕切壁110〜130を通して広い面積でダクトD内に伝えることができる。これにより、冷却効率を向上させることができる。
【0055】
また、CPU基板20、モータドライバ30およびバッテリ40が、ダクトDを取り囲むように配置されることになるので、例えば、ダクトDの一側方でCPU基板20、モータドライバ30およびバッテリ40が並べて配置される構成と比較して、制御装置1を小型化することができる。これにより、配置スペースが限られる移動機械に、制御装置1を好適に配設することができる。
【0056】
また、仕切壁110〜130のそれぞれから直交して延出するフィン50を備えているので、各フィン50の間に冷却気体である空気の通路を確保しつつ、ダクトDの中央までの熱の伝達径路を短くすることができる。これにより、冷却効率をさらに向上させることができる。
【0057】
また、フィン51とフィン52が交互に配置されているので、各フィン51の間の間隔や各フィン52の間の間隔を広めに形成することができる。これにより、一体に形成される基部111とフィン51や、一体に形成される基部121とフィン52を比較的容易に製造することができる。また、フィン51,52が複数設けられているので、冷却効率をさらに向上させることができる。
【0058】
また、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置されているので、筐体100の内外における各ハーネス21,31の取り回し性を向上させることができる。さらに、ハーネス21,31を離した状態で筐体100から引き出すことが可能となるので、ハーネス31から出るノイズがハーネス21に影響を及ぼすことを抑制することができる。
【0059】
また、重量のあるバッテリ40がダクトDの側方に配置されているので、筐体100の補強構造を簡略化または不要とすることができるため、筐体100の構造の簡略化や小型化が可能となる。そして、筐体100の小型化により、制御装置1のさらなる小型化が可能となる。
【0060】
以上に本発明の実施形態について説明したが、本発明は、前記した実施形態に限定されることなく、適宜変形して実施することができる。
例えば、収容空間Sを形成する壁101〜107,110〜130は、電波などの電磁波を遮蔽する電磁波遮蔽機能を有していてもよい。
【0061】
これによれば、収容空間内への電磁波の進入を抑制することができるので、収容空間内に配置された部品への電磁波の影響を抑制することができる。また、収容空間外(筐体の外部)への電磁波の放出を抑制することができるので、制御装置の周辺に配置された部品への電磁波の影響を抑制することができる。
【0062】
なお、収容空間を形成する壁に電磁波遮蔽機能を持たせる方法は、特に限定されるものではなく、例えば、壁自体を鉄や鉛などの電磁波遮蔽材料から形成したり、壁に薄いシート状に形成した電磁波遮蔽材料を貼り付けたり、壁に電磁波遮蔽材料を塗布したりすることなどにより電磁波遮蔽機能を持たせることができる。
【0063】
また、前記実施形態においては、フィン51〜53と一体に形成された基部111〜131が仕切壁110〜130のダクトD側の面に配置されていたが、図5(a)に示すように、基部111〜131は、収容空間S内でCPU基板20などと接して配置されていてもよい。この場合、フィン51〜53は、仕切壁110〜130を貫通してダクトD内に延出するように設けられることとなる。
【0064】
また、図5(b)に示すように、放熱部材としてのフィン51〜53は、仕切壁110〜130に直接設けられていてもよい。この場合、筐体100を形成する壁のうち、少なくとも、仕切壁110〜130は、フィン51〜53と同様に、高い熱伝導性を有する材料(アルミニウムや銅など)から形成されることが望ましい。
【0065】
図5(a),(b)に示すような変形例によれば、CPU基板20などで発生した熱を、直接的に、言い換えると、部材間の熱伝達を介さずに、フィン51〜53に伝導することができるので、冷却効率をより向上させることができる。
【0066】
前記実施形態においては、フィン50がすべての仕切壁110〜130から延出していたが、これに限定されず、例えば、フィンは、第1および第2の仕切壁だけから延出していてもよい。すなわち、図6に示すように、制御装置1は、後仕切壁130(第3の仕切壁)から延出するフィンを備えない構成であってもよい。
【0067】
前記実施形態においては、2つのファン60が、ダクトDの開口部のうちの前側に寄せて配置、すなわち、左右方向に向かい合って配置されていたが、これに限定されず、例えば、図7に示すように、2つのファン60は前後方向にずれて配置されていてもよい。より具体的に、左側のファン60は、ダクトDの開口部のうちの前側に寄せて配置され、右側のファン60は、ダクトDの開口部のうちの後側に寄せて配置されていてもよい。また、図示は省略するが、左側のファン60が、ダクトDの開口部のうちの後側に寄せて配置され、右側のファン60が、ダクトDの開口部のうちの前側に寄せて配置されていてもよい。
【0068】
なお、図7に示したような制御装置1が、例えば、前側(上下の前外壁106,107や前仕切壁140)を取付面として移動機械に取り付けられ、外部にむき出しとなるように配設される構成においては、前後方向にずれて配置された2つのファン60は、両方が外部の空気をダクトD内に取り込むように、または、両方がダクトD内の空気を外部に排出するように取り付けられているとよい。これによれば、2つのファン60で発生する気流により制御装置1にかかる推力は、略相殺されることになるので、移動機械(例えば、二足歩行ロボットなど)全体に対して不要な推力が作用することを抑制することができる。その結果、移動機械の安定性を向上させることが可能となる。
【0069】
また、逆に、ファンにより発生する推力によって移動機械を積極的に移動させるように構成してもよい。例えば、ダクトの貫通方向を移動機械の進行方向に向け、ファンで発生する気流を移動機械の進行方向後方に向けることで、移動機械を移動させるためのエネルギーを節約することができる。
【0070】
前記実施形態においては、ダクトDの一部が開放された構造となっていたが、これに限定されず、例えば、図8に示すように、ダクトDは、ファン60が取り付けられる部分以外が閉じられた構造となっていてもよい。なお、ダクトの一部が開放された構造においては、ダクトの開口部に金属製のメッシュなどを設けてもよい。これによれば、ダクト内への大きな異物の進入を抑制することができる。
【0071】
前記実施形態においては、ダクトDは左右方向に貫通して形成されていたが、これに限定されず、例えば、前後方向や上下方向に貫通して形成されていてもよい。なお、上下方向に貫通するダクトにおいて、冷却気体を下から上に向けて流すようにすれば、温かくなった気体が上方へ流れる性質と相まって、冷却効率をより向上させることができる。
【0072】
前記実施形態においては、放熱部材として、略矩形平板状に形成されたフィン50(51〜53)を例示したが、これに限定されず、例えば、各フィンは、棒状(針状)に形成されていてもよい。また、放熱部材は、フィンに限定されず、例えば、ダクトの貫通方向に沿って延びる金属製のハニカムコアなどであってもよい。
【0073】
前記実施形態においては、筐体100を鋼板などから形成することができると説明したが、筐体は、例えば、アルミニウム板などから形成することもできる。これによれば、筐体を形成する各外壁からも収容空間内で発生した熱を外部に逃がす構成が可能となる。この場合、例えば、図3を参考にして説明すると、CPU基板20と上外壁103の間や、モータドライバ30と下外壁104の間などに熱を伝導する部材を設けてもよい。なお、温かくなった気体が上方へ流れる性質を考慮すると、少なくとも上外壁103を高い熱伝導性を有する材料から形成することで、冷却性能を向上させることが可能となる。
【0074】
前記実施形態においては、制御装置1(図1参照)は、全体として略直方体形状に形成されていたが、制御装置の全体形状(外観形状)は、特定の形状に限定されるものではない。例えば、制御装置は、移動機械の配置スペースにあわせて、立方体形状に形成されていてもよいし、角錐台形状に形成されていてもよい。
【0075】
前記実施形態においては、バッテリ40がダクトDの後方(側方)に配置されていたが、これに限定されず、例えば、バッテリは、移動機械に備えられた状態におけるダクトの下方に配置されていてもよい。これによっても、筐体の補強構造を簡略化または不要とすることが可能となるので、筐体の構造の簡略化や、筐体(制御装置)の小型化が可能となる。
【0076】
なお、本発明において、バッテリの種類は特に限定されるものではない。したがって、バッテリは、一次電池であってもよいし、二次電池であってもよい。また、バッテリとして二次電池を採用する場合には、筐体の壁に、バッテリを充電するときに使用するコネクタなどを設けてもよい。
【0077】
前記実施形態においては、CPU基板20とモータドライバ30がダクトDを挟んで対向して配置される構成において、CPU基板20が上に配置され、モータドライバ30が下に配置されていたが、これに限定されず、例えば、CPU基板20が下に配置され、モータドライバ30が上に配置されていてもよい。また、CPU基板20(またはモータドライバ30)とダクトDを挟んで対向して配置されるのは、バッテリ40(電源装置)であってもよい。
【0078】
前記実施形態においては、ファン60がダクトDの両方の開口部にそれぞれ1つずつ配置されていたが、これに限定されず、例えば、ファンは、複数並べて配置されていてもよい。また、ダクトの一方の開口部に配置されるファンの数と、ダクトの他方の開口部に配置されるファンの数とは、同じであってもよいし、異なっていてもよい。
【0079】
前記実施形態においては、ファン60がダクトDの両方の開口部(両側)にそれぞれ配置されていたが、これに限定されず、例えば、ファンは、ダクトの一方の開口部(片側)だけに配置されていてもよい。この場合、ファンは、1つだけ配置されていてもよいし、複数並べて配置されていてもよい。
【0080】
前記実施形態においては、制御装置1は、ファン60によりダクトD内に空気の流れが形成されるものであったが、これに限定されず、例えば、制御装置は、ファンによりダクト内に窒素ガスやヘリウムガス、アルゴンガスなどの不活性ガスの流れが形成されるものであってもよい。
【0081】
前記実施形態においては、ダクトDは、3つの仕切壁110〜130を介して収容空間Sと隣接していたが、これに限定されず、例えば、ダクトは、矩形断面をなす4つの仕切壁を介して収容空間と隣接していてもよい。言い換えると、ダクトは、収容空間に取り囲まれるように設けられていてもよい。これによれば、演算処理装置、電力制御装置およびバッテリ(電源装置)のほか、収容空間内で4つめの仕切壁に接して配置した装置も効率的に冷却することができる。
【0082】
なお、ダクトを形成する仕切壁(収容空間とダクトを仕切る仕切壁)は、上記したように3つや4つに限定されず、5つ以上であってもよい。また、ダクトの断面形状は、矩形状に限定されず、例えば、五角形状をなしていてもよいし、六角形状をなしていてもよい。さらに、ダクトは、筐体内で一方向に沿って真っ直ぐ延びるトンネル状に限定されず、筐体内で屈曲していてもよい。
【0083】
前記実施形態においては、演算処理装置としてのCPU基板20が、モータドライバ30などを制御することで移動機械を制御するものであったが、これに限定されず、例えば、演算処理装置は、移動機械の各部を直接制御するものであってもよい。
【0084】
前記実施形態においては、電力制御装置としてモータドライバ30を例示したが、これに限定されず、例えば、電力制御装置は、バッテリ(電源装置)から供給された電力を1種類または複数種類の所定の電圧に変換して移動機械の各部を駆動する電力を制御する装置であってもよい。
【0085】
前記実施形態においては、電源装置として、直流電力を供給するバッテリ40を例示したが、これに限定されず、例えば、電源装置は、直流電力を供給するバッテリ以外の電源装置であってもよい。具体的には、外部から入力された電力(直流電力または交流電力)を所定の電圧に変換して演算処理装置や電力制御装置に供給する、電源基板やトランスなどであってもよい。
【符号の説明】
【0086】
1 制御装置
20 CPU基板
30 モータドライバ
40 バッテリ
50 フィン
51 フィン
52 フィン
53 フィン
60 ファン
100 筐体
101 右外壁
102 左外壁
103 上外壁
104 下外壁
105 後外壁
106 上前外壁
107 下前外壁
110 上仕切壁
120 下仕切壁
130 後仕切壁
D ダクト
S 収容空間
【特許請求の範囲】
【請求項1】
移動機械に備えられる制御装置であって、
第1、第2および第3の3つの仕切壁を少なくとも有し、前記仕切壁により貫通するダクトが形成されるとともに、外部から遮蔽された収容空間を形成する筐体と、
前記収容空間内で前記第1の仕切壁に接して配置され、前記移動機械を制御するための演算処理を実行する演算処理装置と、
前記収容空間内で前記第2の仕切壁に接して配置され、前記移動機械を駆動するための電力を制御する電力制御装置と、
前記収容空間内で前記第3の仕切壁に接して配置され、前記演算処理装置および前記電力制御装置に電力を供給する電源装置と、
前記ダクト内に配置され、前記第1から第3の仕切壁を介して前記演算処理装置、前記電力制御装置および前記電源装置からの熱が伝達される放熱部材と、
前記ダクト内に気体の流れを形成して前記放熱部材を冷却するファンとを備えたことを特徴とする制御装置。
【請求項2】
前記放熱部材は、フィンであり、前記第1から第3の仕切壁のそれぞれから直交して延出していることを特徴とする請求項1に記載の制御装置。
【請求項3】
前記放熱部材は、フィンであり、前記第1および第2の仕切壁のそれぞれから直交して延出しており、
前記第1の仕切壁から延出するフィンと前記第2の仕切壁から延出するフィンは、それぞれ複数設けられ、交互に配置されていることを特徴とする請求項1に記載の制御装置。
【請求項4】
前記ダクトは、矩形断面に形成され、
前記演算処理装置と前記電力制御装置は、前記ダクトを挟んで対向して配置されたことを特徴とする請求項1から請求項3のいずれか1項に記載の制御装置。
【請求項5】
前記電源装置は、バッテリであり、前記移動機械に備えられた状態における前記ダクトの側方または下方に配置されたことを特徴とする請求項1から請求項4のいずれか1項に記載の制御装置。
【請求項6】
前記収容空間を形成する壁は、電磁波遮蔽機能を有することを特徴とする請求項1から請求項5のいずれか1項に記載の制御装置。
【請求項1】
移動機械に備えられる制御装置であって、
第1、第2および第3の3つの仕切壁を少なくとも有し、前記仕切壁により貫通するダクトが形成されるとともに、外部から遮蔽された収容空間を形成する筐体と、
前記収容空間内で前記第1の仕切壁に接して配置され、前記移動機械を制御するための演算処理を実行する演算処理装置と、
前記収容空間内で前記第2の仕切壁に接して配置され、前記移動機械を駆動するための電力を制御する電力制御装置と、
前記収容空間内で前記第3の仕切壁に接して配置され、前記演算処理装置および前記電力制御装置に電力を供給する電源装置と、
前記ダクト内に配置され、前記第1から第3の仕切壁を介して前記演算処理装置、前記電力制御装置および前記電源装置からの熱が伝達される放熱部材と、
前記ダクト内に気体の流れを形成して前記放熱部材を冷却するファンとを備えたことを特徴とする制御装置。
【請求項2】
前記放熱部材は、フィンであり、前記第1から第3の仕切壁のそれぞれから直交して延出していることを特徴とする請求項1に記載の制御装置。
【請求項3】
前記放熱部材は、フィンであり、前記第1および第2の仕切壁のそれぞれから直交して延出しており、
前記第1の仕切壁から延出するフィンと前記第2の仕切壁から延出するフィンは、それぞれ複数設けられ、交互に配置されていることを特徴とする請求項1に記載の制御装置。
【請求項4】
前記ダクトは、矩形断面に形成され、
前記演算処理装置と前記電力制御装置は、前記ダクトを挟んで対向して配置されたことを特徴とする請求項1から請求項3のいずれか1項に記載の制御装置。
【請求項5】
前記電源装置は、バッテリであり、前記移動機械に備えられた状態における前記ダクトの側方または下方に配置されたことを特徴とする請求項1から請求項4のいずれか1項に記載の制御装置。
【請求項6】
前記収容空間を形成する壁は、電磁波遮蔽機能を有することを特徴とする請求項1から請求項5のいずれか1項に記載の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−98430(P2013−98430A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241563(P2011−241563)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]