
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することにある。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制駆動力制御装置に関する。
【背景技術】
【0002】
車両には、コーナリング時等にヨーレイト偏差に応じて、左右輪のそれぞれに加える制動力を調整する制御を行い、挙動を安定させる制駆動力制御装置を備えるものがある。例えば、特許文献1には、前後左右の4輪のそれぞれに制動力を加えるホイールシリンダに供給するブレーキ液圧を車輪毎に独立して制御する運動制御装置(制駆動力制御装置)が記載されている。この制駆動力制御装置は、測定した実ヨーレイトと目標ヨーレイトとの差分を検出し、その結果に基づいて各ホイールシリンダに供給するブレーキ液圧を調整する。また、ブレーキペダルの入力の有無に基づいて加える制動力を調整している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3058172号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車輪に供給するブレーキ液圧を車輪毎に調整できる構成では、特許文献1に記載された制駆動力制御装置のように、車輪毎にブレーキ液圧を調整することで車両の挙動を安定化することができる。
【0005】
ここで、車両には、後輪側の左右輪にブレーキ液圧を供給する液圧を共通化した構成、つまり後輪の制動制御を1チャンネル(共通の制動力制御機構)とした構成の車両もある。このように、後輪の制動制御が1チャンネルの構成では、前輪の左右輪に供給するブレーキ圧を制御することで、左右輪に制動力差を生じさせることができる。しかしながら、前輪の左右輪のみの制動力の制御では生じさせる制動力差が4輪を独立して制御する場合よりも小さくなるため、車両の挙動を十分に安定化できない場合がある。
【0006】
本発明は上記の事情に鑑みてなされたものであって、後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、前記車両の実旋回状態量を検出する挙動検出部と、前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両の挙動を判定する挙動判定部と、前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする。
【0008】
ここで、前記制御部は、前記目標旋回状態量と前記実旋回状態量との差が第1閾値以上である場合は前記第1制御モードで制動力を調整し、前記目標旋回状態量と前記実旋回状態量との差が第1閾値未満第2閾値以上である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0009】
また、前記挙動判定部は、前記車両の挙動としてオーバーステアの状態を判定し、前記制御部は、前記オーバーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記オーバーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0010】
また、前記制御部は、前記第2制御モードで、前輪の制動力を調整することが好ましい。
【0011】
また、前記挙動判定部は、前記車両の挙動としてアンダーステアの状態を判定し、前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0012】
また、前記制御部は、前記第2制御モードで、後輪の制動力を調整することが好ましい。
【0013】
また、前記制御部は、前記第2制御モードで、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整することが好ましい。
【0014】
また、前記制御部は、前記第2制御モードで、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整し、アンダーステアが一定値未満の場合は、後輪の制動力を調整することが好ましい。
【0015】
また、前記挙動判定部は、前記目標旋回状態量と前記実旋回状態量との差が第2閾値未満第3閾値以上である場合は、駆動源の駆動力を低減させて制駆動力を調整する第3制御モードで駆動力を調整することが好ましい。
【0016】
本発明は、車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、前記車両の実旋回状態量を検出する挙動検出部と、前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両のアンダーステアの状態を判定する挙動判定部と、前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部のいずれか一方および前記第3制動力調整部で前輪の一方及び後輪の制動力を調整する第1制御モードと、前記第3制動力調整部で後輪の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする。
【0017】
ここで、前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【発明の効果】
【0018】
本発明に係る制駆動力制御装置は、後輪の左右輪を共通の制動力制御機構で制御した場合でも、車両の挙動に合わせて制動力を調整することができ、車両の挙動を安定化することができるという効果を奏する。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の制駆動力制御装置を有する実施形態に係る車両の概略構成を示す模式図である。
【図2】図2は、図1に示すブレーキ油圧回路の概略構成を表す模式図である。
【図3】図3は、図1に示す車両のECUの概略構成を示すブロック図である。
【図4】図4は、制駆動力制御装置による処理の流れを表すフロー図である。
【図5】図5は、制駆動力制御装置による処理の流れを表すフロー図である。
【発明を実施するための形態】
【0020】
以下に、本発明に係る制駆動力制御装置の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。
【0021】
〔実施形態〕
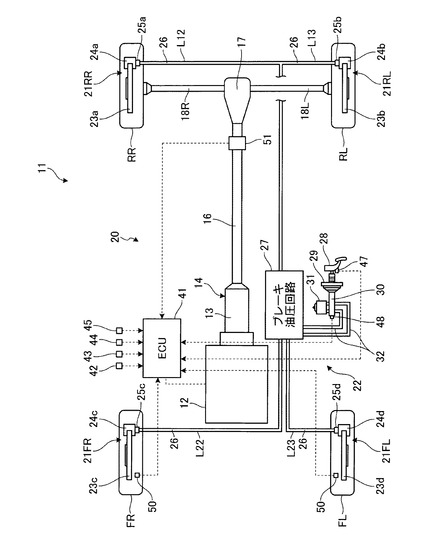
図1は、本発明の制駆動力制御装置を有する実施形態に係る車両の概略構成を示す模式図である。図2は、図1に示すブレーキ油圧回路の概略構成を表す模式図である。図3は、図1に示す車両のECUの概略構成を示すブロック図である。なお、本実施形態では、エンジン12で駆動する車両11として説明するが、これには限定されない。車両は、エンジン12に代えて電気モータを搭載した電気自動車、内燃機関及び電気モータを搭載したハイブリッド車両であってもよい。
【0022】
以下、本実施形態の車両の制駆動力制御装置について詳細に説明する。図1に示すように、車両11は、4つの車輪FL,FR,RL,RRを有している。ここで、車輪FRは運転席から見て前方右側、車輪FLは前方左側、車輪RRは後方右側、車輪RLは後方左側の車輪をそれぞれ表している。また、この車両11は、ガソリンエンジンまたはディーゼルエンジンであるエンジン(内燃機関)12と、自動変速機または無段変速機である変速機13を含むトランスアクスル14と、アウトプットシャフト16と、リヤデファレンシャル17と、ドライブシャフト18L,18Rと、制駆動力制御装置20と、電子制御ユニット(ECU)41と、を有する。なお、電子制御ユニット(ECU)41は、制駆動力制御装置20の一部でもある。また、制駆動力制御装置20を構成する各部は、車両11の他の機能の実現時にも使用される。
【0023】
本実施形態の車両11は、FR方式(フロントエンジン・リアドライブ方式)の車両として構成されている。したがってエンジン12は、車両11の前後方向において、前輪(車輪FL,FR)側に配置されている。トランスアクスル14のアウトプットシャフト16は、リヤデファレンシャル17に接続されており、このリヤデファレンシャル17に、ドライブシャフト18L,18Rを介して後輪側の車輪RL,RRが連結されている。そのため、車両11は、後輪側の車輪RL,RRに、アウトプットシャフト16、リヤデファレンシャル17、ドライブシャフト18L,18Rを介して、エンジン12から動力が伝達される。
【0024】
本実施形態の制駆動力制御装置20は、制動装置22と、液圧ライン26と、ブレーキ油圧回路27と、ブレーキペダル28と、マスタシリンダ30と、リザーバタンク31と、液圧供給通路32と、を有する。また、制駆動力制御装置20は、さらに各種センサも有するがセンサについては後述する。制駆動力制御装置20は、制動装置として、ブレーキペダルから入力されたブレーキ操作量などに対して、車両の制動力、つまり、制動力を発生させるホイールシリンダへ供給する油圧を電気的に制御する電子制御式制動装置である。具体的に、この電子制御式制動装置としては、ブレーキ操作量に応じて目標制動油圧を設定し、アキュムレータに蓄えられた油圧を調圧してから、ホイールシリンダへ供給することで、制動力を制御するECB(Electronically Controlled Brake)である。
【0025】
このECBでは、ドライバがブレーキペダルを踏み込むと、マスタシリンダがその操作量に応じた油圧を発生すると共に、作動油の一部がストロークシミュレータに流れ込み、ブレーキペダルストロークを吸収すると共に、ブレーキペダルにブレーキ反力を付与することで、ブレーキペダルの操作量が調整される。一方、制御部は、ブレーキ操作量に応じて車両の目標制動力、つまり、目標制動油圧を設定し、調圧機構によりアキュムレータの油圧を調圧して各ホイールシリンダに供給することで、乗員が所望する制動力が得られる。また、制駆動力制御装置20は、エンジンの駆動力を制限して制動力を発生させる電子制御式制動装置でもある。
【0026】
また、本実施形態の制駆動力制御装置20は、運転席から見て前方右側の車輪FRと前方左側の車輪FLに加える制動力は独立して制御し、運転席から見て後方右側の車輪RRと後方左側の車輪RLとに加える制動力は共通して制御する。つまり、4つの車輪FL,FR,RL,RRのそれぞれに制動力を加える装置のうち、後輪の2つの車輪RL,RRに制動力を加える装置を共通の装置とし、3つの装置で4つの車輪FL,FR,RL,RRに加える制動力を制御する。
【0027】
制動装置22は、車輪FR〜RLごとに設けられたディスクブレーキユニット21FR,21FL,21RR,21RLを有している。この制動装置22は、所謂、EBD(Electronic Brake force Distribution:電子制動力分配制御)付きのABS(Antilock Brake System:アンチロックブレーキ装置)として構成されている。各ディスクブレーキユニット21FR〜21RLは、それぞれブレーキディスク23a〜23dとブレーキキャリパ24a〜24dを有し、各ブレーキキャリパ24a〜24dは、ホイールシリンダ25a〜25dを内蔵している。なお、ブレーキディスク23aとブレーキキャリパ24aとホイールシリンダ25aとは車輪RRに設けられており、ブレーキディスク23bとブレーキキャリパ24bとホイールシリンダ25bとは車輪RLに設けられており、ブレーキディスク23cとブレーキキャリパ24cとホイールシリンダ25cとは車輪FRに設けられており、ブレーキディスク23dとブレーキキャリパ24dとホイールシリンダ25dとは車輪FLに設けられている。
【0028】
液圧ライン26は、ブレーキキャリパ24a〜24dのホイールシリンダ25a〜25dとブレーキ油圧回路27と後述するマスタシリンダ30とを接続する油圧配管のユニットである。液圧ライン26は、ブレーキキャリパ24a、24bのホイールシリンダ25a、25bとブレーキ油圧回路27とを共通の油圧配管(繋がった油圧配管)で接続している。また、液圧ライン26は、ブレーキキャリパ24c、24dのホイールシリンダ25c、25dとブレーキ油圧回路27とをそれぞれ独立の油圧配管で接続している。液圧ライン26の詳細については後述する。
【0029】
ブレーキ油圧回路27は、共通の液圧ライン26を介してホイールシリンダ25a、25bと接続している。また、ブレーキ油圧回路27は、それぞれ独立の液圧ライン26を介してホイールシリンダ25c、25dと接続している。ブレーキ油圧回路27は、ドライバによるブレーキペダル28の踏み込み量に応じてブレーキ油圧を生成し、このブレーキ油圧を各液圧ライン26からホイールシリンダ25に供給し、この各ホイールシリンダ25a〜25dを作動させることで、制動装置22により車輪FR〜RLに対してブレーキ力を付与し、車両11に制動力を作用させることができる。また、ブレーキ油圧回路27は、ECU41が制御することで各ホイールシリンダ25a〜25dに供給する油圧を調整する。ブレーキ油圧回路27の詳細については後述する。
【0030】
ブレーキペダル28は、ドライバが踏み込み可能に支持され、ブレーキブースタ29が接続され、このブレーキブースタ29にマスタシリンダ30が固定されている。ブレーキブースタ29は、ドライバによるブレーキペダル28の踏み込み操作に対して所定の倍力比を有するアシスト力を発生することができる。マスタシリンダ30は、内部に図示しないピストンが移動自在に支持されることで、2つの油圧室を有しており、各油圧室には、ブレーキ踏力とアシスト力を合わせたマスタシリンダ圧を発生させることができる。マスタシリンダ30の上部には、リザーバタンク31が設けられており、このマスタシリンダ30とリザーバタンク31とは、ブレーキペダル28が踏み込まれていない状態で連通し、ブレーキペダル28が踏み込まれると閉鎖され、マスタシリンダ30の油圧室が加圧される。マスタシリンダ30は、各油圧室がそれぞれ油圧供給通路32を介してブレーキ油圧回路27に接続されている。
【0031】
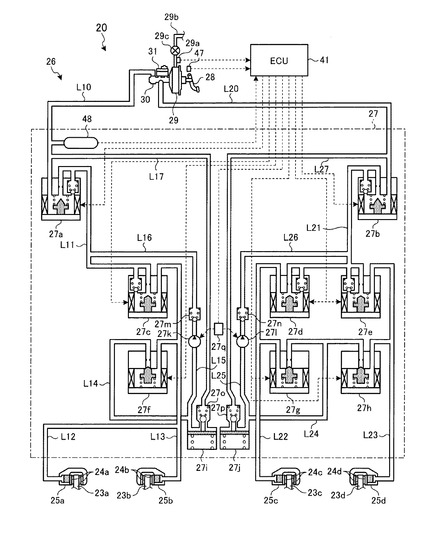
以下、図2を用いて液圧ライン26およびブレーキ油圧回路27について詳細に説明する。なお、図2には、ブレーキ油圧回路27が油圧を供給する各車輪のブレーキディスク23、ブレーキキャリパ24、ホイールシリンダ25や、ブレーキペダル28、ブレーキブースタ29、マスタシリンダ30、ECU41等も示す。
【0032】
まず、ブレーキブースタ29の構成について説明する。図2に示すように、ブレーキブースタ29は、真空式倍力装置であり、図示しない内燃機関により発生する負圧により、運転者がブレーキペダル28を踏み込むことでブレーキペダル28に作用する踏力を増幅するものである。ブレーキブースタ29は、負圧配管29bおよび逆止弁29cを介して、図示しない内燃機関の吸気経路と接続されている。ブレーキブースタ29は、内燃機関の吸気経路に発生する負圧と外気による圧力との差圧により図示しないダイヤフラムに作用する力により踏力を増幅する。実施形態では、ブレーキブースタ29により増幅されたブレーキペダル28に作用する踏力に応じて、マスタシリンダ30によりブレーキオイルが加圧され、ブレーキオイルに操作圧力が付与される。また、操作圧力は、運転者の踏力と内燃機関の負圧に応じたものとなる。また、負圧配管29bには、負圧センサ29aが配置されている。負圧センサ29aは、負圧配管29b内の圧力を負圧PVとして検出する。負圧センサ29aは、ECU41に接続されており、負圧センサ29aが検出した負圧PVは、ECU41に出力される。
【0033】
液圧ライン26は、油圧配管L10〜L17,L20〜L27を有し、マスタシリンダ30とブレーキ油圧回路27の各部とを接続し、ブレーキ油圧回路27を構成する各部品同士を接続し、ブレーキ油圧回路27を構成する各部品と各ホイールシリンダ25とを接続する。
【0034】
ブレーキ油圧回路27は、マスタシリンダ30によりブレーキオイルに付与されたマスタシリンダ圧PMCに応じて各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを制御、あるいはマスタシリンダ30によりブレーキオイルにマスタシリンダ圧PMCが付与されているか否かにかかわらず各ホイールシリンダ25a〜25dにホイールシリンダ圧PWCを作用させるものである。ブレーキ油圧回路27は、マスタカットソレノイドバルブ27a,27bと、保持ソレノイドバルブ27c,27d,27eと、減圧ソレノイドバルブ27f,27g,27hと、リザーバ27i,27jと、加圧ポンプ27k,27lと、逆止弁27m,27n,27o,27pと、駆動用モータ27qと、を有する。
【0035】
各マスタカットソレノイドバルブ27a,27bは、加圧手段を構成する調圧手段であり、加圧圧力を調圧するものである。マスタカットソレノイドバルブ27aは、油圧配管L10と油圧配管L11とに接続されている。マスタカットソレノイドバルブ27aは、油圧配管L10と油圧配管L11との連通、連通の解除や、連通時におけるマスタカットソレノイドバルブ27aの上流側と下流側との差圧を調圧する。つまり、マスタカットソレノイドバルブ27aは、加圧ポンプ27kにより加圧された作動流体(作動油)の圧力とマスタシリンダ圧PMCとの差圧を加圧圧力として調整する。また、マスタカットソレノイドバルブ27bは、油圧配管L20と油圧配管L21とに接続されている。マスタカットソレノイドバルブ27bは、油圧配管L20と油圧配管L21との連通、連通の解除や、連通時におけるマスタカットソレノイドバルブ27bの上流側と下流側との差圧を調整する。つまり、マスタカットソレノイドバルブ27bは、加圧ポンプ27lにより加圧されたブレーキオイルの圧力とマスタシリンダ圧PMCとの差圧を加圧圧力として調整するものである。マスタカットソレノイドバルブ27a,27bは、リニアソレノイドバルブであり、ECU41に接続されている。各マスタカットソレノイドバルブ27a,27bは、ECU41からの制御指令(本実施形態では指令電流値)に基づいて制御され、開度を制御する開度制御がそれぞれ行われる。マスタカットソレノイドバルブ27a,27bは、ECU41の指令電流値に基づいて供給される電流で加圧圧力を調圧する。なお、各マスタカットソレノイドバルブ27a,27bは、電流が供給されていない、すなわち非通電時に全開となっている。
【0036】
保持ソレノイドバルブ27cは、マスタカットソレノイドバルブ27aを介してマスタシリンダ30に接続する油圧配管L11とホイールシリンダ25aに接続する油圧配管L12とホイールシリンダ25bに接続する油圧配管L13とに接続されている。保持ソレノイドバルブ27cは、油圧配管L11と油圧配管L12および油圧配管L13との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25aおよびホイールシリンダ25bとの接続、接続の解除を行う。ここで、油圧配管L12と油圧配管L13とは、保持ソレノイドバルブ27cと接続している配管が共通となっている。つまり、保持ソレノイドバルブ27cと接続している油圧配管は、途中で分岐し、一方が油圧配管L12となり、他方が油圧配管L13となる。これにより、油圧配管L11から流れ、ソレノイドバルブ27cを通過した作動流体は、油圧配管L12と油圧配管L13の両方に流れる。
【0037】
また、保持ソレノイドバルブ27dは、マスタカットソレノイドバルブ27bを介してマスタシリンダ30に接続する油圧配管L21とホイールシリンダ25cに接続する油圧配管L22と接続されている。保持ソレノイドバルブ27dは、油圧配管L21と油圧配管L22との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25cとの接続、接続の解除を行う。また、保持ソレノイドバルブ27eは、マスタカットソレノイドバルブ27bを介してマスタシリンダ30に接続する油圧配管L21とホイールシリンダ25dに接続する油圧配管L23と接続されている。保持ソレノイドバルブ27eは、油圧配管L21と油圧配管L23との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25dとの接続、接続の解除を行う。
【0038】
各保持ソレノイドバルブ27c〜27eは、常開型ソレノイドバルブであり、ECU41に接続されている。従って、各保持ソレノイドバルブ27c〜27eは、ECU41によりON/OFF制御されることで、開閉がそれぞれ制御されるものである。各保持ソレノイドバルブ27c〜27eは、ECU41によりONされると通電状態となり、通電時は全閉となる。一方、ECU41によりOFFされると非通電状態となり、非通電時は全開となる。各保持ソレノイドバルブ27c〜27eは、通電時に各ホイールシリンダ25a〜25dに作用する合計圧力、すなわちホイールシリンダ圧が油圧配管L11,L21内のブレーキオイルの圧力よりも高い場合には、ブレーキオイルを各保持ソレノイドバルブ27c〜27eの上流側(油圧配管L11,L21側)に戻す逆止弁27m〜27pがそれぞれ設けられている。
【0039】
また、減圧ソレノイドバルブ27fは、ホイールシリンダ25aに接続する油圧配管L12およびホイールシリンダ25bに接続する油圧配管L13とリザーバ27iに接続する油圧配管L14と接続されている。減圧ソレノイドバルブ27fは、油圧配管L12および油圧配管L13と油圧配管L14との連通、連通の解除を行い、ホイールシリンダ25aおよびホイールシリンダ25bとリザーバ27iとの接続、接続の解除を行う。
【0040】
また、減圧ソレノイドバルブ27gは、ホイールシリンダ25cに接続する油圧配管L22とリザーバ27jに接続する油圧配管L24と接続されている。減圧ソレノイドバルブ27gは、油圧配管L22と油圧配管L24との連通、連通の解除を行い、ホイールシリンダ25cとリザーバ27jとの接続、接続の解除を行う。また、減圧ソレノイドバルブ27hは、ホイールシリンダ25dに接続する油圧配管L23とリザーバ27jに接続する油圧配管L24と接続されている。減圧ソレノイドバルブ27hは、油圧配管L23と油圧配管L24との連通、連通の解除を行い、ホイールシリンダ25dとリザーバ27jとの接続、接続の解除を行う。
【0041】
各減圧ソレノイドバルブ27f〜27hは、常閉型ソレノイドバルブであり、ECU41に接続されている。従って、各減圧ソレノイドバルブ27f〜27hは、ECU41によりON/OFF制御されることで、開閉がそれぞれ制御されるものである。各減圧ソレノイドバルブ27f〜27hは、ECU41によりONされると通電状態となり、通電時は全開となる。一方、ECU41によりOFFされると非通電状態となり、非通電時は全閉となる。
【0042】
リザーバ27iは、油圧配管L14および加圧ポンプ27kに接続する油圧配管L15と、油圧配管L10に逆止弁27oを介して連通する油圧配管L17と接続されている。リザーバ27iには、減圧ソレノイドバルブ27fからのブレーキオイル、あるいは油圧配管L10、すなわちマスタカットソレノイドバルブ27aの上流側のブレーキオイルが導入される。リザーバ27jは、油圧配管L24および加圧ポンプ27lに接続する油圧配管L25と、油圧配管L20に逆止弁27pを介して連通する油圧配管L27と接続されている。リザーバ27jには、減圧ソレノイドバルブ27g,27hからのブレーキオイル、あるいは油圧配管L20、すなわちマスタカットソレノイドバルブ27bの上流側のブレーキオイルが導入される。
【0043】
各加圧ポンプ27k,27lは、ブレーキオイルを加圧するものである。加圧ポンプ27kは、リザーバ27iに接続する油圧配管L15と、油圧配管L11に逆止弁27mを介して連通する油圧配管L16とに接続されている。加圧ポンプ27kは、リザーバ27iを介してマスタカットソレノイドバルブ27aの上流側のブレーキオイルを吸引し、加圧して油圧配管L11、すなわちマスタカットソレノイドバルブ27aの下流側に吐出する。また、加圧ポンプ27lは、リザーバ27jに接続する油圧配管L25と、油圧配管L21に逆止弁27nを介して連通する油圧配管L26とに接続されている。加圧ポンプ27lは、リザーバ27jを介してマスタカットソレノイドバルブ27bの上流側のブレーキオイルを吸引し、加圧して油圧配管L21、すなわちマスタカットソレノイドバルブ27bの下流側に吐出する。ここで、各加圧ポンプ27k,27lは、駆動用モータ27qにより駆動される。駆動用モータ27qは、ECU41に接続されている。従って、各加圧ポンプ27k,27lは、ECU41により駆動用モータ27qが駆動制御されることで、駆動制御される。このように、ブレーキ油圧回路27は、各加圧ポンプ27k,27lによりブレーキオイルを加圧し、加圧されたブレーキオイルの圧力とマスタシリンダ圧PMCとの差圧を各マスタカットソレノイドバルブ27a,27bがそれぞれ調圧することで、加圧圧力をブレーキオイルに付与する。
【0044】
次に、ブレーキ油圧回路27の動作について説明する。ブレーキ油圧回路27が増圧モード時では、各マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが非通電、各減圧ソレノイドバルブ27f〜27hが非通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。増圧モード時は、マスタシリンダ30と、各ホイールシリンダ25a〜25dが油圧配管L10,L20、各マスタカットソレノイドバルブ27a,27b、油圧配管L11,L21、各保持ソレノイドバルブ27c〜27eおよび油圧配管L12,L13,L22,L23を介して接続される。従って、マスタシリンダ30によりブレーキオイルに付与された操作圧力であるマスタシリンダ圧PMCは、ホイールシリンダ圧PWCとして各ホイールシリンダ25a〜25dに直接作用する。これにより、マスタシリンダ圧PMCに応じて各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを制御することができる。なお、マスタシリンダ30によりブレーキオイルに付与されたマスタシリンダ圧PMCが減少すると、ホイールシリンダ圧PWCも減少する。このとき、各ホイールシリンダ25a〜25d内のブレーキオイルは、油圧配管L12,L13,L22,L23、各保持ソレノイドバルブ27c〜27e、油圧配管L11,L21、各マスタカットソレノイドバルブ27a,27bおよび油圧配管L10,L20を介してマスタシリンダ30に戻され、リザーバタンク31に貯留される。
【0045】
次に、ブレーキ油圧回路27が保持モード時では、マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが通電、各減圧ソレノイドバルブ27f〜27hが非通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。保持モード時は、各保持ソレノイドバルブ27c〜27eと各ホイールシリンダ25a〜25dとの間でブレーキオイルが保持されるため、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを一定に維持できる。また、ブレーキ油圧回路27が減圧モード時では、マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが通電、各減圧ソレノイドバルブ27f〜27hが通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。減圧モード時は、各保持ソレノイドバルブ27c〜27eと各ホイールシリンダ25a〜25dとの間で保持されていたブレーキオイルが油圧配管L14,L24および油圧配管L15,L25を介してリザーバ27i,27jに貯留されるため、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを減少できる。これにより、ブレーキ油圧回路27は、図示しない前後輪のいずれかがロックして路面に対してスリップすることを抑制するアンチロックブレーキ制御を行うことができる。
【0046】
なお、ブレーキ油圧回路27が増圧モード時では、ブレーキオイルに加圧圧力を付与することができる。例えば、マスタカットソレノイドバルブ27a,27bがECU41からの指令電流値に基づいて開度制御され、開度が全開時よりも小さくなり、加圧ポンプ27k,27lを駆動する駆動用モータ27qがECU41からの駆動指令値に基づいて駆動制御されると、各マスタカットソレノイドバルブ27a,27bの上流側、すなわち油圧配管L10,L20から各リザーバ27i,27jにブレーキオイルが導入される。各リザーバ27i,27jに導入されたブレーキオイルは、加圧ポンプ27k,27lにより加圧され、油圧配管L11,L21、各保持ソレノイドバルブ27c〜27eおよび油圧配管L12,L13,L22,L23を介して各ホイールシリンダ25a〜25dに充填される。ここで、各マスタカットソレノイドバルブ27a,27bは、各マスタカットソレノイドバルブ27a,27bの下流側のブレーキオイル、すなわち各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCと、各マスタカットソレノイドバルブ27a,27bの上流側のブレーキオイル、すなわちマスタシリンダ30により発生するマスタシリンダ圧PMCとの差圧を加圧圧力として調圧しているので、ホイールシリンダ圧PWCは、マスタシリンダ圧PMCと加圧圧力との合計圧力となる。つまり、合計圧力は、ホイールシリンダ圧として各ホイールシリンダ25a〜25dに作用する。
【0047】
また、ブレーキ油圧回路27は、保持ソレノイドバルブ27dと、減圧ソレノイドバルブ27gとの開閉(通電、非通電)を切り換えることで、ホイールシリンダ25cに供給するホイールシリンダ圧を調整することができ、保持ソレノイドバルブ27eと、減圧ソレノイドバルブ27hとの開閉(通電、非通電)を切り換えることで、ホイールシリンダ25dに供給するホイールシリンダ圧を調整することができる。これにより、ホイールシリンダ25cに供給するホイールシリンダ圧と、ホイールシリンダ25dに供給するホイールシリンダ圧とを異なるホイールシリンダ圧とすることができる。
【0048】
また、ブレーキ油圧回路27は、運転者によるブレーキペダル28の操作を行わない場合でも、ECU41により、ブレーキオイルの加圧を行うことができる。このとき、上述した保持モード、減圧モードとなるように、ECU41によりブレーキ油圧回路27を制御すれば、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを調整することができる。これにより、ブレーキ油圧回路27は、前後輪のいずれかが駆動力を路面に伝達している際に、路面に対してスリップすることを抑制するトラクションコントロールや、車両が旋回中に、車輪FL,FR,RL,RRのいずれかが横滑りをすることを抑制する姿勢安定化制御(VSC)などを行うことができる。
【0049】
このように、ブレーキ油圧回路27は、マスタカットソレノイドバルブ27bと保持ソレノイドバルブ27dと減圧ソレノイドバルブ27gとを含む第1制動力調整部でホイールシリンダ25cに供給するホイールシリンダ圧を制御する。また、ブレーキ油圧回路27は、マスタカットソレノイドバルブ27bと保持ソレノイドバルブ27eと減圧ソレノイドバルブ27hとを含む第2制動力調整部でホイールシリンダ25dに供給するホイールシリンダ圧を制御する。ブレーキ油圧回路27は、マスタカットソレノイドバルブ27aと保持ソレノイドバルブ27cと減圧ソレノイドバルブ27fとを含む第3制動力調整部でホイールシリンダ25aとホイールシリンダ25bとに供給するホイールシリンダ圧を、制御する。以上より、ブレーキ油圧回路27は、各ホイールシリンダ25a〜25dに供給するホイールシリンダ圧を、ホイールシリンダ25aとホイールシリンダ25bとに供給するホイールシリンダ圧、ホイールシリンダ25cに供給するホイールシリンダ圧、ホイールシリンダ25dに供給するホイールシリンダ圧の3系統(第1制動力調整部、第2制動力調整部、第3制動力調整部)で制御することができる。
【0050】
次に、電子制御ユニット(ECU)41は、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROMと、データを一時的に記憶するRAMと、入出力ポート及び通信ポートを有している。従って、このECU41は、エンジン12、変速機13、ブレーキ油圧回路27などを制御可能となっている。
【0051】
また、車両11は、車両の挙動を検出するためのセンサや運転手による操作を検出するためのセンサとして、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51とを有する。
【0052】
横Gセンサ42は、車両11の横Gを検出するものである。横Gセンサ42は、ECU41に接続されており、検出した横GをECU41に送信する。前後Gセンサ43は、車両の前後Gを検出するものである。前後Gセンサ43は、ECU41に接続されており、検出した前後GをECU41に送信する。ヨーレイトセンサ44は、車両のヨーレイトを検出する。ヨーレイトセンサ44は、ECU41に接続されており、検出したヨーレイトをECU41に送信する。
【0053】
操舵角センサ45は、操舵量検出手段であり、車両11の操舵量を検出するものである。ここで、操舵角センサ45は、例えば操舵装置のステアリングアームに対向して配置され、ステアリングアームの軸周りの変位量を光学的あるいは力学的に検出する。操舵角センサ45は、車両11の操舵量として、操舵角を検出するものである。操舵角センサ45は、ECU41に接続されており、検出した車両11の操舵量である車両11の操舵角をECU41に送信する。
【0054】
ブレーキストロークセンサ47は、ブレーキペダル28の踏み込み量(ブレーキペダルストローク)を検出するものである。ブレーキストロークセンサ47は、ECU41に接続されており、検出したブレーキペダルストロークをECU41に送信している。
【0055】
マスタシリンダ圧センサ48は、操作圧力検出手段であり、操作圧力を検出するものである。マスタシリンダ圧センサ48は、実施形態では、マスタシリンダ30とブレーキ油圧回路27のマスタカットソレノイドバルブ27aとを接続する油圧配管L10の途中に設けられている。つまり、マスタシリンダ圧センサ48は、油圧配管L10内のブレーキオイルの圧力を操作圧力、すなわちマスタシリンダ圧PMCとして検出するものである。マスタシリンダ圧センサ48は、ECU41に接続されており、検出したマスタシリンダ圧PMCをECU41に送信する。
【0056】
車輪速センサ50は、前輪の2つの車輪FR,FLのそれぞれに配置されており、それぞれの車輪の車輪速を検出するものである。車輪速センサ50は、それぞれ検出した車輪FRの車輪速または車輪FLの車輪速をECU41に送信する。
【0057】
車速センサ51は、車両の走行速度(車速)を検出するものである。車速センサ51は、アウトプットシャフト16の回転を検出し、アウトプットシャフト16の回転から車輪RR、RLの回転を算出して車速を検出する。車速センサ51は、検出した車速をECU41に送信する。車速センサ51は、後輪の2つの車輪RR、RLに動力を伝達し回転させるアウトプットシャフト16の回転を検出することで、車輪RR、RLの回転の平均値を検出することができる。これにより、1つの計測装置で車速を検出することができる。なお、車速センサ51は、リヤデファレンシャル17に設け、リヤデファレンシャル17の回転を検出し、リヤデファレンシャル17の回転から車速を検出してもよい。また、本実施形態では、車速センサ51を設けたが、各車輪速センサの検出値に基づいて公知の方法で演算により算出してもよい。つまり、車速センサ51は、別途を検出素子を設けずに、車輪速センサ50の結果から演算のみで車速を算出するようにしてもよい。
【0058】
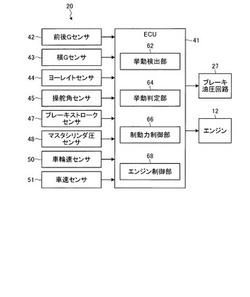
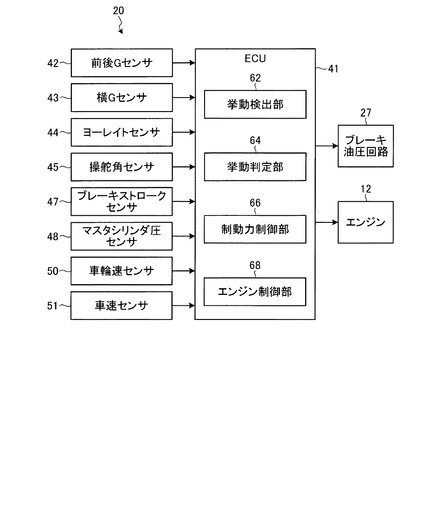
次に、図3を用いて、ECU41による各部の制御について説明する。ECU41は、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51と接続しており、各センサで検出した検出値を受け取る(受信する)。また、ECU41は、エンジン12およびブレーキ油圧回路27と接続しており、各センサで検出した検出値に基づいてエンジン12およびブレーキ油圧回路27の動作を制御する。ここで、ECU41は、挙動検出部62と挙動判定部64と制動力制御部66とエンジン制御部68とを有する。なお、以下では、ECU41による、制駆動動作、主に制動動作の制御について説明するが、ECU41は、並行して車両11の走行で行う各種制御も行う。
【0059】
挙動検出部62は、主にヨーレイトセンサ44の検出値に基づいて、車両11の挙動を検出する。挙動検出部62は、ヨーレイトセンサ44の検出結果に基づいて、実ヨーレイト(実旋回状態量)を検出する。ここで、実ヨーレイトとは、車両11に作用しているヨーレイトである。なお、挙動検出部62は、前後Gセンサ42と横Gセンサ43との少なくとも一つ検出値も加味して、実ヨーレイト(実旋回状態量)を検出してもよい。また、本実施形態では実ヨーレイトをヨーレイトセンサ44により検出したが、実ヨーレイトの検出方法はこれに限定されない。
【0060】
挙動判定部64は、車両11の挙動を判定する。挙動判定部64は、まず操舵角センサ45で検出した操舵角に基づいて、目標ヨーレイト(目標旋回状態量)を算出する。ここで、目標ヨーレイトとは、走行条件、入力操作等に基づいて算出される車両11に作用していると想定されるヨーレイトである。つまり、目標ヨーレイトは、入力された条件に基づいて算出されるヨーレイトである。なお、挙動判定部64は、操舵角センサ45の検出結果に加え、ブレーキストロークセンサ47の検出結果も加味して目標ヨーレイトを検出してもよい。
【0061】
挙動判定部64は、挙動検出部62で検出した実ヨーレイトと、算出した目標ヨーレイトとの差分を検出し、ヨーレイトの偏差、つまり目標ヨーレイトと実ヨーレイトとのずれを検出する。挙動判定部64は、さらに、検出したヨーレイトの偏差に基づいて車両11の挙動を判定する。ここで、挙動判定部64は、ヨーレイトの偏差の数値範囲を複数記憶しており、検出したヨーレイトの偏差がその数値範囲に入るかを判定する。本実施形態の挙動判定部64は、車両11がオーバーステアである場合のヨーレイトの偏差の数値範囲と、車両11がアンダーステアである場合のヨーレイトの偏差の数値範囲とを記憶している。なお、オーバーステアとは、実ヨーレイトが目標ヨーレイトよりも大きい場合、つまり車両11が目標よりも曲がっている(旋回量が多い)場合であり、アンダーステアとは、目標ヨーレイトが実ヨーレイトよりも大きい場合つまり車両11が目標よりも曲がっていない(旋回量が少ない)場合である。
【0062】
本実施形態の挙動判定部64は、車両11がオーバーステアである場合のヨーレイトの偏差の数値範囲を3種類記憶しており、車両11がアンダーステアである場合のヨーレイトの偏差の数値範囲を3種類記憶している。具体的には、挙動判定部64は、オーバーステアである場合の数値範囲として、第1オーバーステア挙動の数値範囲と第2オーバーステア挙動の数値範囲と第3オーバーステア挙動の数値範囲とを記憶している。ここで、第1オーバーステア挙動の数値範囲は、第2オーバーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲であり、第2オーバーステア挙動の数値範囲は、第3オーバーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲である。また、挙動判定部64は、アンダーステアである場合の数値範囲として、第1アンダーステア挙動の数値範囲と第2アンダーステア挙動の数値範囲と第3アンダーステア挙動の数値範囲とを記憶している。ここで、第1アンダーステア挙動の数値範囲は、第2アンダーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲であり、第2アンダーステア挙動の数値範囲は、第3アンダーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲である。なお、第1オーバーステア挙動の数値範囲および第1アンダーステア挙動の数値範囲のヨーレイト偏差の上限値は、基本的に、車両11で想定されるヨーレイト偏差の最大値よりも大きい値である。なお、第1オーバーステア挙動の数値範囲および第1アンダーステア挙動の数値範囲のヨーレイト偏差の上限値は設定しなくてもよい、つまり無限大を上限値としてもよい。
【0063】
制動力制御部66は、挙動判定部64で検出(判定)したヨーレイトの偏差または挙動判定部64で特定された数値範囲に基づいて、制動装置、具体的にはブレーキ油圧回路27の動作を制御し、各車輪に加える制動力を制御する。
【0064】
エンジン制御部68は、挙動判定部64で検出したヨーレイトの偏差または挙動判定部64で特定された数値範囲に基づいて、エンジン12の駆動量を制御する。
【0065】
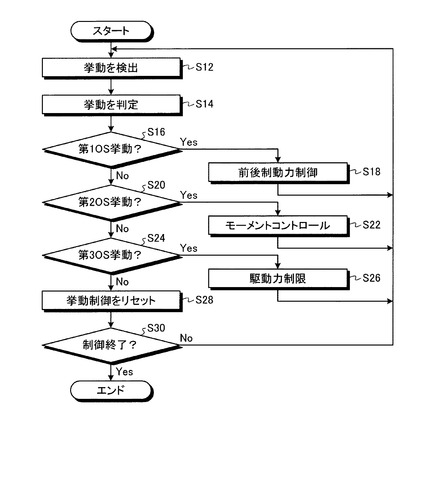
次に、図4を用いて本実施形態の車両の制駆動力制御装置20による処理の流れを説明する。ここで、図4は、制駆動力制御装置による処理の流れを表すフロー図である。なお、図4は、車両11の挙動としてオーバーステアが検出された場合の処理の一例を示している。また、制駆動力制御装置20による処理は、基本的にECU41の制御により実行される。
【0066】
まず、ECU41は、ステップS12として、挙動判定部64で車両11の挙動を検出する。つまり、ECU41は、挙動判定部64によりヨーレイトセンサ44での検出結果に基づいて実ヨーレイトを検出する。ECU41は、ステップS12で車両11の挙動を検出したら、ステップS14として、挙動判定部64で車両11の挙動を判定する。つまり、ECU41は、挙動判定部64により、ステップS12で検出した実ヨーレイトと算出した目標ヨーレイトとの差分であるヨーレイトの偏差を検出し、検出したヨーレイトの偏差が第1オーバーステア挙動の数値範囲か、第2オーバーステア挙動の数値範囲か、第3オーバーステア挙動の数値範囲か、いずれの数値範囲にも含まれないかを判定する。
【0067】
その後、ECU41は、ステップS16として、挙動判定部642第1オーバーステア挙動(第1OS挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれているかを判定する。
【0068】
ECU41は、ステップS16で第1OS挙動である(Yes)、つまりヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS18として、前後制動力制御を実行する。ここで、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させる制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25a〜25dのホイールシリンダ圧の圧力を高くし、ディスクブレーキユニット21FR〜21RLから各車輪FR〜RLに制動力を付与する。このように、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させ、車両11を減速させる制御である。なお、制動力制御部66は、前後制動力制御において、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する制動力を算出すればよい。制動力制御部66は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。ECU41は、ステップS18の処理を行ったらステップS12に進む。
【0069】
ECU41は、ステップS16で第1OS挙動ではない(No)、つまりヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS20として、挙動判定部64で第2オーバーステア挙動(第2OS挙動)であるかを判定する。つまり、ECU41は、挙動検出部62により検出したヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれているかを判定する。
【0070】
ECU41は、ステップS20で第2OS挙動である(Yes)、つまりヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS22として、モーメントコントロールを実行する。ここで、モーメントコントロールとは、前輪の2つの車輪FL,FRに作用させる制動力を調整する制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25c、25dのホイールシリンダ圧の圧力を調整し、ディスクブレーキユニット21FRが車輪FRに付与する制動力とディスクブレーキユニット21FLが車輪FLに付与する制動力とを調整する。制動力制御部66は、例えば、実ヨーレイトが目標ヨーレイトよりも大きいオーバーステア状態、つまり曲がりすぎの状態であるため、旋回方向の外側の車輪(外輪)に付与する制動力を旋回方向内側の車輪(内輪)に付与する制動力よりも大きくする。このように制動力を調整することで、車両11が曲がりすぎている状態(旋回しすぎている)を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。なお、制動力制御部66は、モーメントコントロールにおいて、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する2つの前輪に付与する制動力を算出すればよい。ECU41は、ステップS22の処理を行ったらステップS12に進む。
【0071】
ECU41は、ステップS20で第2OS挙動ではない(No)、つまりヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS24として、挙動判定部64で第3オーバーステア挙動(第3OS挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれているかを判定する。
【0072】
ECU41は、ステップS24で第3OS挙動である(Yes)、つまりヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS26として、駆動力制限を実行する。ここで、駆動力制限とは、エンジン12の駆動力を制御し、エンジントルクにより制動力を発生させる制御である。なお、ECU41は、駆動力制限の制御時に、さらにブレーキ油圧回路27を作動させ後輪の2輪に制動力を作用させ、車輪をスリップさせるようにしてもよい。このようにエンジントルクにより制動力を付与することで、車輪に作用している駆動力を路面に伝達しやすくすることで、車両11が曲がりすぎている状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。ECU41は、ステップS24の処理を行ったらステップS12に進む。
【0073】
次に、ECU41は、ステップS24で第3OS挙動ではない(No)、つまりヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS28として、挙動制御をリセットする。つまり、ECU41は、ステップS24でNoとなる場合は、第1OS挙動、第2OS挙動、第3OS挙動のいずれにも含まれていない状態であり、車両11の挙動として設定された数値範囲のオーバーステアが発生していないと判定し、挙動制御(ステップS18、ステップS22、ステップS26の制御)を終了する。なお、ECU41は、挙動制御を行っていない場合、そのまま次の処理に進む。
【0074】
ECU41は、ステップS28の処理を行ったら、ステップS30として、制御終了であるかを判定する。つまり、ECU41は、制駆動力制御装置20による制御を終了するかを判定する。なお、制駆動力制御装置20は、例えばパーキングブレーキにより車両11が停止している場合やエンジン12が停止している場合等、車両11が走行しない状態である場合に制御を終了すると判定する。ECU41は、ステップS30で処理を終了しない(No)と判定したら、ステップS12に進む。また、ECU41は、ステップS30で制御終了(Yes)と判定したら、本処理を終了する。
【0075】
制駆動力制御装置20は、車両11の挙動であるヨーレイトの偏差の値、本実施形態ではオーバーステアの大きさに基づいて実行する車両11の挙動の制御を切り換えることで、車両11の挙動に適した制御を実行することができる。これにより、本実施形態のように制動力を3系統で制御する構成(後輪の制動力を1つの油圧系統で制御する構成)でも、オーバーステアを抑制し、車両11の挙動を安定させることができる。つまり制駆動力制御装置20は、ヨーレイトの偏差に応じて、4つの車輪の全ての制動力を調整する制御(減速を優先させる制御)と前輪の制動力のみを調整する制御(ヨーレイトの偏差の低減を優先させる制御)とを切り換えることで車両11の挙動を安定させることができる。
【0076】
本実施形態では、オーバーステアが最も大きい範囲である第1OS挙動である場合は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。また、オーバーステアが第1OS挙動よりも小さい第2OS挙動である場合は、前輪の2輪のそれぞれに付与する制動力を調整し、左右の制動力差によるモーメントコントロールを行うことで、オーバーステアを抑制することができる。また、オーバーステアが第2OS挙動よりも小さい第3OS挙動である場合は、制動装置22ではなくエンジン12のエンジントルクにより車両11の加速度を減少させる(つまりエンジンブレーキにより減速させる、加速量を低減させる)ことで、車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。
【0077】
また、制駆動力制御装置20は、オーバーステアが小さくなるに従って、第1OS挙動の制御、第2OS挙動の制御、第3OS挙動の制御に順次切り替わる。これにより、減速を優先させる制御を行う場合でも、オーバーステアが一定程度小さくなったら、ヨーレイトの偏差の低減を優先させる制御に切り替わる。これにより、制動装置22により制動力を作用させて減速した場合でも一定程度減速されたら、制動力の付与が低減または無くなり、走行状態を維持することができる。
【0078】
このように、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成では十分にモーメントコントロールができない第1OS挙動の場合は、車両を減速させることでオーバーステアを抑制することができる。また、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成でも十分にモーメントコントロールができる第2OS挙動の場合は、モーメントコントロールでオーバーステアを抑制することができる。また、制駆動力制御装置20は、左右の制動力差でモーメントコントロールするまでもない第3OS挙動の場合は、エンジントルクを制御することで、オーバーステアを抑制することができる。
【0079】
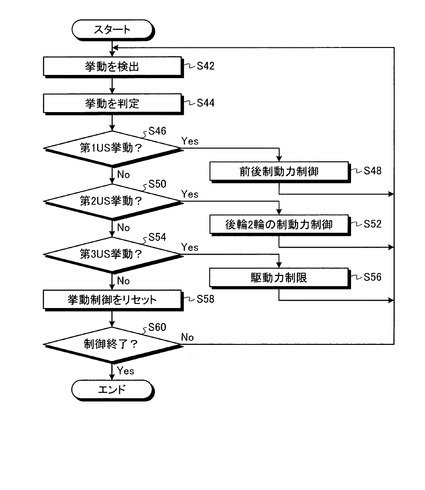
次に、図5を用いて本実施形態の車両の制駆動力制御装置20による他の処理の流れを説明する。ここで、図5は、制駆動力制御装置による処理の流れを表すフロー図である。なお、図5は、車両11の挙動としてアンダーステアが検出された場合の処理の一例を示している。また、制駆動力制御装置20による処理は、基本的にECU41の制御により実行される。
【0080】
まず、ECU41は、ステップS42として、挙動検出部62で車両11の挙動を検出する。つまり、ECU41は、挙動検出部62によりヨーレイトセンサ44での検出結果に基づいて実ヨーレイトを検出する。ECU41は、ステップS42で車両11の挙動を検出したら、ステップS44として、挙動判定部64で車両11の挙動を判定する。つまり、ECU41は、挙動判定部64により、ステップS42で検出した実ヨーレイトと算出した目標ヨーレイトとの差分であるヨーレイトの偏差を検出し、検出したヨーレイトの偏差が第1アンダーステア挙動の数値範囲か、第2アンダーステア挙動の数値範囲か、第3アンダーステア挙動の数値範囲か、いずれの数値範囲にも含まれないかを判定する。
【0081】
その後、ECU41は、ステップS46として、挙動判定部64で第1アンダーステア挙動(第1US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれているかを判定する。
【0082】
ECU41は、ステップS46で第1US挙動である(Yes)、つまりヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS48として、前後制動力制御を実行する。ここで、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させる制御である。なお、前後制動力制御は、上述したステップS18の前後制動力制御と同様の制御である。制動力制御部66は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。ECU41は、ステップS48の処理を行ったらステップS42に進む。
【0083】
ECU41は、ステップS46で第1US挙動ではない(No)、つまりヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS50として、挙動判定部64で第2アンダーステア挙動(第2US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれているかを判定する。
【0084】
ECU41は、ステップS50で第2US挙動である(Yes)、つまりヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS52として、後輪2輪の制動力制御を実行する。ここで、後輪2輪の制動力制御とは、後輪の2つの車輪RL,RRに制動力を付与する制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25a、25bのホイールシリンダ圧の圧力を増加し、ディスクブレーキユニット21RRが車輪RRに付与する制動力とディスクブレーキユニット21RLが車輪RLに付与する制動力とを増加する。制動力制御部66は、後輪の2つの車輪に制動力を付与することで車両11を減速させることができる。これにより、前輪の2つの車輪が操舵されることで車両に付与する横力によって車両11が曲がりやすい状態とすることができ、旋回量を大きくすることができる。このように後輪の2つの車輪に制動力を付与することで、車両11が曲がっていない状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。なお、制動力制御部66は、後輪2輪の制動力制御において、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する2つの後輪に付与する制動力を算出すればよい。ECU41は、ステップS52の処理を行ったらステップS42に進む。
【0085】
ECU41は、ステップS50で第2US挙動ではない(No)、つまりヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS54として、挙動判定部64で第3アンダーステア挙動(第3US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれているかを判定する。
【0086】
ECU41は、ステップS54で第3US挙動である(Yes)、つまりヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS56として、駆動力制限を実行する。ここで、駆動力制限は、上述したステップS26の制御と同様である。このようにエンジントルクにより制動力を付与することで、車輪に作用している駆動力を路面に伝達しやすくすることで、車両11が曲がっていない状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。ECU41は、ステップS56の処理を行ったらステップS42に進む。
【0087】
次に、ECU41は、ステップS54で第3US挙動ではない(No)、つまりヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS58として、挙動制御をリセットする。つまり、ECU41は、ステップS54でNoとなる場合は、第1US挙動、第2US挙動、第3US挙動のいずれにも含まれていない状態であり、車両11の挙動として設定された数値範囲のアンダーステアが発生していないと判定し、挙動制御(ステップS48、ステップS52、ステップS56の制御)を終了する。なお、ECU41は、挙動制御を行っていない場合、そのまま次の処理に進む。
【0088】
ECU41は、ステップS58の処理を行ったら、ステップS60として、制御終了であるかを判定する。ECU41は、ステップS60で処理を終了しない(No)と判定したら、ステップS42に進む。また、ECU41は、ステップS60で制御終了(Yes)と判定したら、本処理を終了する。
【0089】
制駆動力制御装置20は、車両11の挙動であるヨーレイトの偏差の値、本実施形態ではアンダーステアの大きさに基づいて実行する車両11の挙動の制御を切り換えることで、車両11の挙動に適した制御を実行することができる。これにより、本実施形態のように制動力を3系統で制御する構成(後輪の制動力を1つの油圧系統で制御する構成)でも、アンダーステアを抑制し、車両11の挙動を安定させることができる。つまり制駆動力制御装置20は、ヨーレイトの偏差に応じて、4つの車輪の全ての制動力を調整する制御(減速を優先させる制御)と、後輪の制動力のみを調整する制御(ヨーレイト偏差の低減を優先させる制御)とを切り換えることで車両11の挙動を安定させることができる。
【0090】
本実施形態では、アンダーステアが最も大きい範囲である第1US挙動である場合は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。また、アンダーステアが第1US挙動よりも小さい第2US挙動である場合は、後輪の2輪に制動力を付与することで、車両11を曲がりやすくすることができアンダーステアを抑制することができる。また、アンダーステアが第2US挙動よりも小さい第3US挙動である場合は、制動装置22ではなくエンジン12のエンジントルクにより車両11の加速度を減少させる(減速させる、加速量を低減する)ことで、車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。
【0091】
このように、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成では、モーメントコントロールができない第1US挙動の場合は、車両を減速させることでアンダーステアを抑制することができる。また、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成でも十分にモーメントコントロールができる第2US挙動の場合は、後輪2輪の制動力制御でアンダーステアを抑制することができる。また、制駆動力制御装置20は、後輪2輪の制動力を付与するまでもない第3US挙動の場合は、エンジントルクを制御することで、アンダーステアを抑制することができる。また、第3US挙動の場合は、ブレーキ油圧回路27を駆動させずにアンダーステアを抑制できるため車両11の制御が簡単になる。
【0092】
また、制駆動力制御装置20は、アンダーステアが小さくなるに従って、第1US挙動の制御、第2US挙動の制御、第3US挙動の制御に順次切り替わる。これにより、減速を優先させる制御を行う場合でも、アンダーステアが一定程度小さくなったら、ヨーレイトの偏差の低減を優先させる制御に切り換わる。これにより、制動装置22により制動力を作用させて減速した場合でも一定程度減速されたら、制動力の付与が低減または無くなり、走行状態を維持することができる。
【0093】
なお、図5に示すようにアンダーステアを制御する場合、制駆動力制御装置20は、前輪の2つの車輪に付与する制動力を調整し、左右の車輪に付与する制動力に差を与え、モーメントコントロールを行うことが好ましい。このように、前輪の2つの車輪に付与する制動力でモーメントコントロールを行うことで、車両11の挙動をより適切に制御することができ、アンダーステアを抑制することができる。なお、前輪の2つの車輪に付与する制動力でモーメントコントロールを行う制御は、第1US挙動の場合の制御、第2US挙動の場合の制御、第3US挙動の制御のいずれの場合でも実行することが好ましい。
【0094】
また、図5に示すようにアンダーステアを制御する場合、上記実施形態では第1US挙動の場合の制御と第2US挙動の場合との2つの場合に分けたがこれに限定されない。制駆動力制御装置20は、ヨーレイトの偏差の大きさ、つまりアンダーステアの大きさに基づいて第1US挙動の場合の制御と第2US挙動の場合の制御とで前輪の2つの車輪に付与する制動力と、後輪の2つの車輪に付与する制動力のバランス(比)を調整するようにしてもよい。具体的には、アンダーステアの大きさが大きくなるに従って前輪に付与する制動力の大きさを大きくするようにしてもよい。このように、アンダーステアの大きさに基づいて前輪と後輪に付与する制動力のバランスを調整することで、車両11の挙動つまりアンダーステアをより適切に抑制することができる。この場合は、第1US挙動の場合に前輪と後輪に付与する制動力のバランスを調整すればよい。
【0095】
また、本実施形態では、駆動源としてエンジン12を用いているため、第3OS挙動、第3US挙動の場合に、エンジントルクを制御して駆動力の制限を実行したが、駆動源としてエンジン以外を用いる場合も駆動源の駆動力を制限すればよい。つまり、モータの場合はモータの出力を制限(低減)すればよい。
【0096】
また、制駆動力制御装置20は、図4に示す処理と、図5に示す処理の両方を並列で実行することが好ましいが、いずれか一方の処理のみを実行してもよい。
【0097】
ここで、制駆動力制御装置20は、第1OS挙動の場合の制御と第1US挙動の場合の制御として4つの車輪に付与する制動力としては、種々の値の制動力とすることができるが、最大の制動力を付与することが好ましい。これにより、オーバーステア、アンダーステアが大きい場合に車両11を迅速に減速させることができ、車両11の挙動をより迅速に安定化することができる。
【0098】
また、上記実施形態では、第2US制御として後輪2輪の制動力を制御したが、後輪2輪に加え、前輪の一方の車輪の制動力も制御してもよい。つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力を調整し、4つの車輪のうち3つの車輪に付与する制動力を調整してもよい。なお、制駆動力制御装置20は、第2US制御として後輪2輪の制動力に換えて、前輪の一方の車輪と後輪2輪の制動力の制御を行うことに限定されない。制駆動力制御装置20は、車両の挙動によって、前輪、後輪の前輪の制動力を調整する制御と、前輪の一方と後輪の制動力を調整する制御と、後輪の制動力を調整する制御とを、切り換えるようにしてもよい。例えば、制駆動力制御装置20は、第2US制御として、アンダーステアの値によりさらに実行する制御を切り換えるようにしてもよく、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力(つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力)を調整し、アンダーステアが一定値未満の場合は、後輪の制動力(第3制動力調整部で制動力)を調整してもよい。また、単に、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力(つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力)を調整し、アンダーステアが一定値未満の場合は、後輪の制動力(第3制動力調整部で制動力)を調整してもよい。つまり、4つの車輪の全ての制動力を調整する制御を行わずに、アンダーステアの値に応じて4つの車輪のうち3つの車輪に付与する制動力を調整する制御モードと、後輪2輪の制動力を調整する制御モードを選択するようにしてもよい。
【0099】
また、制駆動力制御装置20は、第1OS挙動の場合の制御、第2OS挙動の場合の制御、第1US挙動の場合の制御及び第2US挙動の場合の制御として、さらに駆動力制限を行うようにしてもよい。これにより、制動装置22による制動力の制御に加え、車両11を減速させることができ、車両11の挙動をより迅速に安定化することができる。
【0100】
また、上記実施形態では、第3OS挙動、第3US挙動の場合に、駆動力制限を制御して車両の挙動を制御したが、エンジントルクの制御は必ずしも行わなくてもよい。つまり、第1OS挙動の場合の制御と第2OS挙動の場合の制御のみ、また、第1US挙動の場合の制御、第2US挙動の場合の制御のみを行ってもよい。
【符号の説明】
【0101】
11 車両
12 エンジン
20 制駆動力制御装置
22 制動装置
41 電子制御ユニット(ECU)
62 挙動検出部
64 挙動判定部
66 制動力制御部
68 エンジン制御部
【技術分野】
【0001】
本発明は、車両の制駆動力制御装置に関する。
【背景技術】
【0002】
車両には、コーナリング時等にヨーレイト偏差に応じて、左右輪のそれぞれに加える制動力を調整する制御を行い、挙動を安定させる制駆動力制御装置を備えるものがある。例えば、特許文献1には、前後左右の4輪のそれぞれに制動力を加えるホイールシリンダに供給するブレーキ液圧を車輪毎に独立して制御する運動制御装置(制駆動力制御装置)が記載されている。この制駆動力制御装置は、測定した実ヨーレイトと目標ヨーレイトとの差分を検出し、その結果に基づいて各ホイールシリンダに供給するブレーキ液圧を調整する。また、ブレーキペダルの入力の有無に基づいて加える制動力を調整している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3058172号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車輪に供給するブレーキ液圧を車輪毎に調整できる構成では、特許文献1に記載された制駆動力制御装置のように、車輪毎にブレーキ液圧を調整することで車両の挙動を安定化することができる。
【0005】
ここで、車両には、後輪側の左右輪にブレーキ液圧を供給する液圧を共通化した構成、つまり後輪の制動制御を1チャンネル(共通の制動力制御機構)とした構成の車両もある。このように、後輪の制動制御が1チャンネルの構成では、前輪の左右輪に供給するブレーキ圧を制御することで、左右輪に制動力差を生じさせることができる。しかしながら、前輪の左右輪のみの制動力の制御では生じさせる制動力差が4輪を独立して制御する場合よりも小さくなるため、車両の挙動を十分に安定化できない場合がある。
【0006】
本発明は上記の事情に鑑みてなされたものであって、後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、前記車両の実旋回状態量を検出する挙動検出部と、前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両の挙動を判定する挙動判定部と、前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする。
【0008】
ここで、前記制御部は、前記目標旋回状態量と前記実旋回状態量との差が第1閾値以上である場合は前記第1制御モードで制動力を調整し、前記目標旋回状態量と前記実旋回状態量との差が第1閾値未満第2閾値以上である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0009】
また、前記挙動判定部は、前記車両の挙動としてオーバーステアの状態を判定し、前記制御部は、前記オーバーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記オーバーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0010】
また、前記制御部は、前記第2制御モードで、前輪の制動力を調整することが好ましい。
【0011】
また、前記挙動判定部は、前記車両の挙動としてアンダーステアの状態を判定し、前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【0012】
また、前記制御部は、前記第2制御モードで、後輪の制動力を調整することが好ましい。
【0013】
また、前記制御部は、前記第2制御モードで、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整することが好ましい。
【0014】
また、前記制御部は、前記第2制御モードで、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整し、アンダーステアが一定値未満の場合は、後輪の制動力を調整することが好ましい。
【0015】
また、前記挙動判定部は、前記目標旋回状態量と前記実旋回状態量との差が第2閾値未満第3閾値以上である場合は、駆動源の駆動力を低減させて制駆動力を調整する第3制御モードで駆動力を調整することが好ましい。
【0016】
本発明は、車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、前記車両の実旋回状態量を検出する挙動検出部と、前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両のアンダーステアの状態を判定する挙動判定部と、前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部のいずれか一方および前記第3制動力調整部で前輪の一方及び後輪の制動力を調整する第1制御モードと、前記第3制動力調整部で後輪の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする。
【0017】
ここで、前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することが好ましい。
【発明の効果】
【0018】
本発明に係る制駆動力制御装置は、後輪の左右輪を共通の制動力制御機構で制御した場合でも、車両の挙動に合わせて制動力を調整することができ、車両の挙動を安定化することができるという効果を奏する。
【図面の簡単な説明】
【0019】
【図1】図1は、本発明の制駆動力制御装置を有する実施形態に係る車両の概略構成を示す模式図である。
【図2】図2は、図1に示すブレーキ油圧回路の概略構成を表す模式図である。
【図3】図3は、図1に示す車両のECUの概略構成を示すブロック図である。
【図4】図4は、制駆動力制御装置による処理の流れを表すフロー図である。
【図5】図5は、制駆動力制御装置による処理の流れを表すフロー図である。
【発明を実施するための形態】
【0020】
以下に、本発明に係る制駆動力制御装置の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。
【0021】
〔実施形態〕
図1は、本発明の制駆動力制御装置を有する実施形態に係る車両の概略構成を示す模式図である。図2は、図1に示すブレーキ油圧回路の概略構成を表す模式図である。図3は、図1に示す車両のECUの概略構成を示すブロック図である。なお、本実施形態では、エンジン12で駆動する車両11として説明するが、これには限定されない。車両は、エンジン12に代えて電気モータを搭載した電気自動車、内燃機関及び電気モータを搭載したハイブリッド車両であってもよい。
【0022】
以下、本実施形態の車両の制駆動力制御装置について詳細に説明する。図1に示すように、車両11は、4つの車輪FL,FR,RL,RRを有している。ここで、車輪FRは運転席から見て前方右側、車輪FLは前方左側、車輪RRは後方右側、車輪RLは後方左側の車輪をそれぞれ表している。また、この車両11は、ガソリンエンジンまたはディーゼルエンジンであるエンジン(内燃機関)12と、自動変速機または無段変速機である変速機13を含むトランスアクスル14と、アウトプットシャフト16と、リヤデファレンシャル17と、ドライブシャフト18L,18Rと、制駆動力制御装置20と、電子制御ユニット(ECU)41と、を有する。なお、電子制御ユニット(ECU)41は、制駆動力制御装置20の一部でもある。また、制駆動力制御装置20を構成する各部は、車両11の他の機能の実現時にも使用される。
【0023】
本実施形態の車両11は、FR方式(フロントエンジン・リアドライブ方式)の車両として構成されている。したがってエンジン12は、車両11の前後方向において、前輪(車輪FL,FR)側に配置されている。トランスアクスル14のアウトプットシャフト16は、リヤデファレンシャル17に接続されており、このリヤデファレンシャル17に、ドライブシャフト18L,18Rを介して後輪側の車輪RL,RRが連結されている。そのため、車両11は、後輪側の車輪RL,RRに、アウトプットシャフト16、リヤデファレンシャル17、ドライブシャフト18L,18Rを介して、エンジン12から動力が伝達される。
【0024】
本実施形態の制駆動力制御装置20は、制動装置22と、液圧ライン26と、ブレーキ油圧回路27と、ブレーキペダル28と、マスタシリンダ30と、リザーバタンク31と、液圧供給通路32と、を有する。また、制駆動力制御装置20は、さらに各種センサも有するがセンサについては後述する。制駆動力制御装置20は、制動装置として、ブレーキペダルから入力されたブレーキ操作量などに対して、車両の制動力、つまり、制動力を発生させるホイールシリンダへ供給する油圧を電気的に制御する電子制御式制動装置である。具体的に、この電子制御式制動装置としては、ブレーキ操作量に応じて目標制動油圧を設定し、アキュムレータに蓄えられた油圧を調圧してから、ホイールシリンダへ供給することで、制動力を制御するECB(Electronically Controlled Brake)である。
【0025】
このECBでは、ドライバがブレーキペダルを踏み込むと、マスタシリンダがその操作量に応じた油圧を発生すると共に、作動油の一部がストロークシミュレータに流れ込み、ブレーキペダルストロークを吸収すると共に、ブレーキペダルにブレーキ反力を付与することで、ブレーキペダルの操作量が調整される。一方、制御部は、ブレーキ操作量に応じて車両の目標制動力、つまり、目標制動油圧を設定し、調圧機構によりアキュムレータの油圧を調圧して各ホイールシリンダに供給することで、乗員が所望する制動力が得られる。また、制駆動力制御装置20は、エンジンの駆動力を制限して制動力を発生させる電子制御式制動装置でもある。
【0026】
また、本実施形態の制駆動力制御装置20は、運転席から見て前方右側の車輪FRと前方左側の車輪FLに加える制動力は独立して制御し、運転席から見て後方右側の車輪RRと後方左側の車輪RLとに加える制動力は共通して制御する。つまり、4つの車輪FL,FR,RL,RRのそれぞれに制動力を加える装置のうち、後輪の2つの車輪RL,RRに制動力を加える装置を共通の装置とし、3つの装置で4つの車輪FL,FR,RL,RRに加える制動力を制御する。
【0027】
制動装置22は、車輪FR〜RLごとに設けられたディスクブレーキユニット21FR,21FL,21RR,21RLを有している。この制動装置22は、所謂、EBD(Electronic Brake force Distribution:電子制動力分配制御)付きのABS(Antilock Brake System:アンチロックブレーキ装置)として構成されている。各ディスクブレーキユニット21FR〜21RLは、それぞれブレーキディスク23a〜23dとブレーキキャリパ24a〜24dを有し、各ブレーキキャリパ24a〜24dは、ホイールシリンダ25a〜25dを内蔵している。なお、ブレーキディスク23aとブレーキキャリパ24aとホイールシリンダ25aとは車輪RRに設けられており、ブレーキディスク23bとブレーキキャリパ24bとホイールシリンダ25bとは車輪RLに設けられており、ブレーキディスク23cとブレーキキャリパ24cとホイールシリンダ25cとは車輪FRに設けられており、ブレーキディスク23dとブレーキキャリパ24dとホイールシリンダ25dとは車輪FLに設けられている。
【0028】
液圧ライン26は、ブレーキキャリパ24a〜24dのホイールシリンダ25a〜25dとブレーキ油圧回路27と後述するマスタシリンダ30とを接続する油圧配管のユニットである。液圧ライン26は、ブレーキキャリパ24a、24bのホイールシリンダ25a、25bとブレーキ油圧回路27とを共通の油圧配管(繋がった油圧配管)で接続している。また、液圧ライン26は、ブレーキキャリパ24c、24dのホイールシリンダ25c、25dとブレーキ油圧回路27とをそれぞれ独立の油圧配管で接続している。液圧ライン26の詳細については後述する。
【0029】
ブレーキ油圧回路27は、共通の液圧ライン26を介してホイールシリンダ25a、25bと接続している。また、ブレーキ油圧回路27は、それぞれ独立の液圧ライン26を介してホイールシリンダ25c、25dと接続している。ブレーキ油圧回路27は、ドライバによるブレーキペダル28の踏み込み量に応じてブレーキ油圧を生成し、このブレーキ油圧を各液圧ライン26からホイールシリンダ25に供給し、この各ホイールシリンダ25a〜25dを作動させることで、制動装置22により車輪FR〜RLに対してブレーキ力を付与し、車両11に制動力を作用させることができる。また、ブレーキ油圧回路27は、ECU41が制御することで各ホイールシリンダ25a〜25dに供給する油圧を調整する。ブレーキ油圧回路27の詳細については後述する。
【0030】
ブレーキペダル28は、ドライバが踏み込み可能に支持され、ブレーキブースタ29が接続され、このブレーキブースタ29にマスタシリンダ30が固定されている。ブレーキブースタ29は、ドライバによるブレーキペダル28の踏み込み操作に対して所定の倍力比を有するアシスト力を発生することができる。マスタシリンダ30は、内部に図示しないピストンが移動自在に支持されることで、2つの油圧室を有しており、各油圧室には、ブレーキ踏力とアシスト力を合わせたマスタシリンダ圧を発生させることができる。マスタシリンダ30の上部には、リザーバタンク31が設けられており、このマスタシリンダ30とリザーバタンク31とは、ブレーキペダル28が踏み込まれていない状態で連通し、ブレーキペダル28が踏み込まれると閉鎖され、マスタシリンダ30の油圧室が加圧される。マスタシリンダ30は、各油圧室がそれぞれ油圧供給通路32を介してブレーキ油圧回路27に接続されている。
【0031】
以下、図2を用いて液圧ライン26およびブレーキ油圧回路27について詳細に説明する。なお、図2には、ブレーキ油圧回路27が油圧を供給する各車輪のブレーキディスク23、ブレーキキャリパ24、ホイールシリンダ25や、ブレーキペダル28、ブレーキブースタ29、マスタシリンダ30、ECU41等も示す。
【0032】
まず、ブレーキブースタ29の構成について説明する。図2に示すように、ブレーキブースタ29は、真空式倍力装置であり、図示しない内燃機関により発生する負圧により、運転者がブレーキペダル28を踏み込むことでブレーキペダル28に作用する踏力を増幅するものである。ブレーキブースタ29は、負圧配管29bおよび逆止弁29cを介して、図示しない内燃機関の吸気経路と接続されている。ブレーキブースタ29は、内燃機関の吸気経路に発生する負圧と外気による圧力との差圧により図示しないダイヤフラムに作用する力により踏力を増幅する。実施形態では、ブレーキブースタ29により増幅されたブレーキペダル28に作用する踏力に応じて、マスタシリンダ30によりブレーキオイルが加圧され、ブレーキオイルに操作圧力が付与される。また、操作圧力は、運転者の踏力と内燃機関の負圧に応じたものとなる。また、負圧配管29bには、負圧センサ29aが配置されている。負圧センサ29aは、負圧配管29b内の圧力を負圧PVとして検出する。負圧センサ29aは、ECU41に接続されており、負圧センサ29aが検出した負圧PVは、ECU41に出力される。
【0033】
液圧ライン26は、油圧配管L10〜L17,L20〜L27を有し、マスタシリンダ30とブレーキ油圧回路27の各部とを接続し、ブレーキ油圧回路27を構成する各部品同士を接続し、ブレーキ油圧回路27を構成する各部品と各ホイールシリンダ25とを接続する。
【0034】
ブレーキ油圧回路27は、マスタシリンダ30によりブレーキオイルに付与されたマスタシリンダ圧PMCに応じて各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを制御、あるいはマスタシリンダ30によりブレーキオイルにマスタシリンダ圧PMCが付与されているか否かにかかわらず各ホイールシリンダ25a〜25dにホイールシリンダ圧PWCを作用させるものである。ブレーキ油圧回路27は、マスタカットソレノイドバルブ27a,27bと、保持ソレノイドバルブ27c,27d,27eと、減圧ソレノイドバルブ27f,27g,27hと、リザーバ27i,27jと、加圧ポンプ27k,27lと、逆止弁27m,27n,27o,27pと、駆動用モータ27qと、を有する。
【0035】
各マスタカットソレノイドバルブ27a,27bは、加圧手段を構成する調圧手段であり、加圧圧力を調圧するものである。マスタカットソレノイドバルブ27aは、油圧配管L10と油圧配管L11とに接続されている。マスタカットソレノイドバルブ27aは、油圧配管L10と油圧配管L11との連通、連通の解除や、連通時におけるマスタカットソレノイドバルブ27aの上流側と下流側との差圧を調圧する。つまり、マスタカットソレノイドバルブ27aは、加圧ポンプ27kにより加圧された作動流体(作動油)の圧力とマスタシリンダ圧PMCとの差圧を加圧圧力として調整する。また、マスタカットソレノイドバルブ27bは、油圧配管L20と油圧配管L21とに接続されている。マスタカットソレノイドバルブ27bは、油圧配管L20と油圧配管L21との連通、連通の解除や、連通時におけるマスタカットソレノイドバルブ27bの上流側と下流側との差圧を調整する。つまり、マスタカットソレノイドバルブ27bは、加圧ポンプ27lにより加圧されたブレーキオイルの圧力とマスタシリンダ圧PMCとの差圧を加圧圧力として調整するものである。マスタカットソレノイドバルブ27a,27bは、リニアソレノイドバルブであり、ECU41に接続されている。各マスタカットソレノイドバルブ27a,27bは、ECU41からの制御指令(本実施形態では指令電流値)に基づいて制御され、開度を制御する開度制御がそれぞれ行われる。マスタカットソレノイドバルブ27a,27bは、ECU41の指令電流値に基づいて供給される電流で加圧圧力を調圧する。なお、各マスタカットソレノイドバルブ27a,27bは、電流が供給されていない、すなわち非通電時に全開となっている。
【0036】
保持ソレノイドバルブ27cは、マスタカットソレノイドバルブ27aを介してマスタシリンダ30に接続する油圧配管L11とホイールシリンダ25aに接続する油圧配管L12とホイールシリンダ25bに接続する油圧配管L13とに接続されている。保持ソレノイドバルブ27cは、油圧配管L11と油圧配管L12および油圧配管L13との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25aおよびホイールシリンダ25bとの接続、接続の解除を行う。ここで、油圧配管L12と油圧配管L13とは、保持ソレノイドバルブ27cと接続している配管が共通となっている。つまり、保持ソレノイドバルブ27cと接続している油圧配管は、途中で分岐し、一方が油圧配管L12となり、他方が油圧配管L13となる。これにより、油圧配管L11から流れ、ソレノイドバルブ27cを通過した作動流体は、油圧配管L12と油圧配管L13の両方に流れる。
【0037】
また、保持ソレノイドバルブ27dは、マスタカットソレノイドバルブ27bを介してマスタシリンダ30に接続する油圧配管L21とホイールシリンダ25cに接続する油圧配管L22と接続されている。保持ソレノイドバルブ27dは、油圧配管L21と油圧配管L22との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25cとの接続、接続の解除を行う。また、保持ソレノイドバルブ27eは、マスタカットソレノイドバルブ27bを介してマスタシリンダ30に接続する油圧配管L21とホイールシリンダ25dに接続する油圧配管L23と接続されている。保持ソレノイドバルブ27eは、油圧配管L21と油圧配管L23との連通、連通の解除を行い、マスタシリンダ30とホイールシリンダ25dとの接続、接続の解除を行う。
【0038】
各保持ソレノイドバルブ27c〜27eは、常開型ソレノイドバルブであり、ECU41に接続されている。従って、各保持ソレノイドバルブ27c〜27eは、ECU41によりON/OFF制御されることで、開閉がそれぞれ制御されるものである。各保持ソレノイドバルブ27c〜27eは、ECU41によりONされると通電状態となり、通電時は全閉となる。一方、ECU41によりOFFされると非通電状態となり、非通電時は全開となる。各保持ソレノイドバルブ27c〜27eは、通電時に各ホイールシリンダ25a〜25dに作用する合計圧力、すなわちホイールシリンダ圧が油圧配管L11,L21内のブレーキオイルの圧力よりも高い場合には、ブレーキオイルを各保持ソレノイドバルブ27c〜27eの上流側(油圧配管L11,L21側)に戻す逆止弁27m〜27pがそれぞれ設けられている。
【0039】
また、減圧ソレノイドバルブ27fは、ホイールシリンダ25aに接続する油圧配管L12およびホイールシリンダ25bに接続する油圧配管L13とリザーバ27iに接続する油圧配管L14と接続されている。減圧ソレノイドバルブ27fは、油圧配管L12および油圧配管L13と油圧配管L14との連通、連通の解除を行い、ホイールシリンダ25aおよびホイールシリンダ25bとリザーバ27iとの接続、接続の解除を行う。
【0040】
また、減圧ソレノイドバルブ27gは、ホイールシリンダ25cに接続する油圧配管L22とリザーバ27jに接続する油圧配管L24と接続されている。減圧ソレノイドバルブ27gは、油圧配管L22と油圧配管L24との連通、連通の解除を行い、ホイールシリンダ25cとリザーバ27jとの接続、接続の解除を行う。また、減圧ソレノイドバルブ27hは、ホイールシリンダ25dに接続する油圧配管L23とリザーバ27jに接続する油圧配管L24と接続されている。減圧ソレノイドバルブ27hは、油圧配管L23と油圧配管L24との連通、連通の解除を行い、ホイールシリンダ25dとリザーバ27jとの接続、接続の解除を行う。
【0041】
各減圧ソレノイドバルブ27f〜27hは、常閉型ソレノイドバルブであり、ECU41に接続されている。従って、各減圧ソレノイドバルブ27f〜27hは、ECU41によりON/OFF制御されることで、開閉がそれぞれ制御されるものである。各減圧ソレノイドバルブ27f〜27hは、ECU41によりONされると通電状態となり、通電時は全開となる。一方、ECU41によりOFFされると非通電状態となり、非通電時は全閉となる。
【0042】
リザーバ27iは、油圧配管L14および加圧ポンプ27kに接続する油圧配管L15と、油圧配管L10に逆止弁27oを介して連通する油圧配管L17と接続されている。リザーバ27iには、減圧ソレノイドバルブ27fからのブレーキオイル、あるいは油圧配管L10、すなわちマスタカットソレノイドバルブ27aの上流側のブレーキオイルが導入される。リザーバ27jは、油圧配管L24および加圧ポンプ27lに接続する油圧配管L25と、油圧配管L20に逆止弁27pを介して連通する油圧配管L27と接続されている。リザーバ27jには、減圧ソレノイドバルブ27g,27hからのブレーキオイル、あるいは油圧配管L20、すなわちマスタカットソレノイドバルブ27bの上流側のブレーキオイルが導入される。
【0043】
各加圧ポンプ27k,27lは、ブレーキオイルを加圧するものである。加圧ポンプ27kは、リザーバ27iに接続する油圧配管L15と、油圧配管L11に逆止弁27mを介して連通する油圧配管L16とに接続されている。加圧ポンプ27kは、リザーバ27iを介してマスタカットソレノイドバルブ27aの上流側のブレーキオイルを吸引し、加圧して油圧配管L11、すなわちマスタカットソレノイドバルブ27aの下流側に吐出する。また、加圧ポンプ27lは、リザーバ27jに接続する油圧配管L25と、油圧配管L21に逆止弁27nを介して連通する油圧配管L26とに接続されている。加圧ポンプ27lは、リザーバ27jを介してマスタカットソレノイドバルブ27bの上流側のブレーキオイルを吸引し、加圧して油圧配管L21、すなわちマスタカットソレノイドバルブ27bの下流側に吐出する。ここで、各加圧ポンプ27k,27lは、駆動用モータ27qにより駆動される。駆動用モータ27qは、ECU41に接続されている。従って、各加圧ポンプ27k,27lは、ECU41により駆動用モータ27qが駆動制御されることで、駆動制御される。このように、ブレーキ油圧回路27は、各加圧ポンプ27k,27lによりブレーキオイルを加圧し、加圧されたブレーキオイルの圧力とマスタシリンダ圧PMCとの差圧を各マスタカットソレノイドバルブ27a,27bがそれぞれ調圧することで、加圧圧力をブレーキオイルに付与する。
【0044】
次に、ブレーキ油圧回路27の動作について説明する。ブレーキ油圧回路27が増圧モード時では、各マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが非通電、各減圧ソレノイドバルブ27f〜27hが非通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。増圧モード時は、マスタシリンダ30と、各ホイールシリンダ25a〜25dが油圧配管L10,L20、各マスタカットソレノイドバルブ27a,27b、油圧配管L11,L21、各保持ソレノイドバルブ27c〜27eおよび油圧配管L12,L13,L22,L23を介して接続される。従って、マスタシリンダ30によりブレーキオイルに付与された操作圧力であるマスタシリンダ圧PMCは、ホイールシリンダ圧PWCとして各ホイールシリンダ25a〜25dに直接作用する。これにより、マスタシリンダ圧PMCに応じて各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを制御することができる。なお、マスタシリンダ30によりブレーキオイルに付与されたマスタシリンダ圧PMCが減少すると、ホイールシリンダ圧PWCも減少する。このとき、各ホイールシリンダ25a〜25d内のブレーキオイルは、油圧配管L12,L13,L22,L23、各保持ソレノイドバルブ27c〜27e、油圧配管L11,L21、各マスタカットソレノイドバルブ27a,27bおよび油圧配管L10,L20を介してマスタシリンダ30に戻され、リザーバタンク31に貯留される。
【0045】
次に、ブレーキ油圧回路27が保持モード時では、マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが通電、各減圧ソレノイドバルブ27f〜27hが非通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。保持モード時は、各保持ソレノイドバルブ27c〜27eと各ホイールシリンダ25a〜25dとの間でブレーキオイルが保持されるため、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを一定に維持できる。また、ブレーキ油圧回路27が減圧モード時では、マスタカットソレノイドバルブ27a,27bが非通電、各保持ソレノイドバルブ27c〜27eが通電、各減圧ソレノイドバルブ27f〜27hが通電、各加圧ポンプ27k,27lが非駆動となるように、ECU41がブレーキ油圧回路27を制御する。減圧モード時は、各保持ソレノイドバルブ27c〜27eと各ホイールシリンダ25a〜25dとの間で保持されていたブレーキオイルが油圧配管L14,L24および油圧配管L15,L25を介してリザーバ27i,27jに貯留されるため、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを減少できる。これにより、ブレーキ油圧回路27は、図示しない前後輪のいずれかがロックして路面に対してスリップすることを抑制するアンチロックブレーキ制御を行うことができる。
【0046】
なお、ブレーキ油圧回路27が増圧モード時では、ブレーキオイルに加圧圧力を付与することができる。例えば、マスタカットソレノイドバルブ27a,27bがECU41からの指令電流値に基づいて開度制御され、開度が全開時よりも小さくなり、加圧ポンプ27k,27lを駆動する駆動用モータ27qがECU41からの駆動指令値に基づいて駆動制御されると、各マスタカットソレノイドバルブ27a,27bの上流側、すなわち油圧配管L10,L20から各リザーバ27i,27jにブレーキオイルが導入される。各リザーバ27i,27jに導入されたブレーキオイルは、加圧ポンプ27k,27lにより加圧され、油圧配管L11,L21、各保持ソレノイドバルブ27c〜27eおよび油圧配管L12,L13,L22,L23を介して各ホイールシリンダ25a〜25dに充填される。ここで、各マスタカットソレノイドバルブ27a,27bは、各マスタカットソレノイドバルブ27a,27bの下流側のブレーキオイル、すなわち各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCと、各マスタカットソレノイドバルブ27a,27bの上流側のブレーキオイル、すなわちマスタシリンダ30により発生するマスタシリンダ圧PMCとの差圧を加圧圧力として調圧しているので、ホイールシリンダ圧PWCは、マスタシリンダ圧PMCと加圧圧力との合計圧力となる。つまり、合計圧力は、ホイールシリンダ圧として各ホイールシリンダ25a〜25dに作用する。
【0047】
また、ブレーキ油圧回路27は、保持ソレノイドバルブ27dと、減圧ソレノイドバルブ27gとの開閉(通電、非通電)を切り換えることで、ホイールシリンダ25cに供給するホイールシリンダ圧を調整することができ、保持ソレノイドバルブ27eと、減圧ソレノイドバルブ27hとの開閉(通電、非通電)を切り換えることで、ホイールシリンダ25dに供給するホイールシリンダ圧を調整することができる。これにより、ホイールシリンダ25cに供給するホイールシリンダ圧と、ホイールシリンダ25dに供給するホイールシリンダ圧とを異なるホイールシリンダ圧とすることができる。
【0048】
また、ブレーキ油圧回路27は、運転者によるブレーキペダル28の操作を行わない場合でも、ECU41により、ブレーキオイルの加圧を行うことができる。このとき、上述した保持モード、減圧モードとなるように、ECU41によりブレーキ油圧回路27を制御すれば、各ホイールシリンダ25a〜25dに作用するホイールシリンダ圧PWCを調整することができる。これにより、ブレーキ油圧回路27は、前後輪のいずれかが駆動力を路面に伝達している際に、路面に対してスリップすることを抑制するトラクションコントロールや、車両が旋回中に、車輪FL,FR,RL,RRのいずれかが横滑りをすることを抑制する姿勢安定化制御(VSC)などを行うことができる。
【0049】
このように、ブレーキ油圧回路27は、マスタカットソレノイドバルブ27bと保持ソレノイドバルブ27dと減圧ソレノイドバルブ27gとを含む第1制動力調整部でホイールシリンダ25cに供給するホイールシリンダ圧を制御する。また、ブレーキ油圧回路27は、マスタカットソレノイドバルブ27bと保持ソレノイドバルブ27eと減圧ソレノイドバルブ27hとを含む第2制動力調整部でホイールシリンダ25dに供給するホイールシリンダ圧を制御する。ブレーキ油圧回路27は、マスタカットソレノイドバルブ27aと保持ソレノイドバルブ27cと減圧ソレノイドバルブ27fとを含む第3制動力調整部でホイールシリンダ25aとホイールシリンダ25bとに供給するホイールシリンダ圧を、制御する。以上より、ブレーキ油圧回路27は、各ホイールシリンダ25a〜25dに供給するホイールシリンダ圧を、ホイールシリンダ25aとホイールシリンダ25bとに供給するホイールシリンダ圧、ホイールシリンダ25cに供給するホイールシリンダ圧、ホイールシリンダ25dに供給するホイールシリンダ圧の3系統(第1制動力調整部、第2制動力調整部、第3制動力調整部)で制御することができる。
【0050】
次に、電子制御ユニット(ECU)41は、CPUを中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROMと、データを一時的に記憶するRAMと、入出力ポート及び通信ポートを有している。従って、このECU41は、エンジン12、変速機13、ブレーキ油圧回路27などを制御可能となっている。
【0051】
また、車両11は、車両の挙動を検出するためのセンサや運転手による操作を検出するためのセンサとして、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51とを有する。
【0052】
横Gセンサ42は、車両11の横Gを検出するものである。横Gセンサ42は、ECU41に接続されており、検出した横GをECU41に送信する。前後Gセンサ43は、車両の前後Gを検出するものである。前後Gセンサ43は、ECU41に接続されており、検出した前後GをECU41に送信する。ヨーレイトセンサ44は、車両のヨーレイトを検出する。ヨーレイトセンサ44は、ECU41に接続されており、検出したヨーレイトをECU41に送信する。
【0053】
操舵角センサ45は、操舵量検出手段であり、車両11の操舵量を検出するものである。ここで、操舵角センサ45は、例えば操舵装置のステアリングアームに対向して配置され、ステアリングアームの軸周りの変位量を光学的あるいは力学的に検出する。操舵角センサ45は、車両11の操舵量として、操舵角を検出するものである。操舵角センサ45は、ECU41に接続されており、検出した車両11の操舵量である車両11の操舵角をECU41に送信する。
【0054】
ブレーキストロークセンサ47は、ブレーキペダル28の踏み込み量(ブレーキペダルストローク)を検出するものである。ブレーキストロークセンサ47は、ECU41に接続されており、検出したブレーキペダルストロークをECU41に送信している。
【0055】
マスタシリンダ圧センサ48は、操作圧力検出手段であり、操作圧力を検出するものである。マスタシリンダ圧センサ48は、実施形態では、マスタシリンダ30とブレーキ油圧回路27のマスタカットソレノイドバルブ27aとを接続する油圧配管L10の途中に設けられている。つまり、マスタシリンダ圧センサ48は、油圧配管L10内のブレーキオイルの圧力を操作圧力、すなわちマスタシリンダ圧PMCとして検出するものである。マスタシリンダ圧センサ48は、ECU41に接続されており、検出したマスタシリンダ圧PMCをECU41に送信する。
【0056】
車輪速センサ50は、前輪の2つの車輪FR,FLのそれぞれに配置されており、それぞれの車輪の車輪速を検出するものである。車輪速センサ50は、それぞれ検出した車輪FRの車輪速または車輪FLの車輪速をECU41に送信する。
【0057】
車速センサ51は、車両の走行速度(車速)を検出するものである。車速センサ51は、アウトプットシャフト16の回転を検出し、アウトプットシャフト16の回転から車輪RR、RLの回転を算出して車速を検出する。車速センサ51は、検出した車速をECU41に送信する。車速センサ51は、後輪の2つの車輪RR、RLに動力を伝達し回転させるアウトプットシャフト16の回転を検出することで、車輪RR、RLの回転の平均値を検出することができる。これにより、1つの計測装置で車速を検出することができる。なお、車速センサ51は、リヤデファレンシャル17に設け、リヤデファレンシャル17の回転を検出し、リヤデファレンシャル17の回転から車速を検出してもよい。また、本実施形態では、車速センサ51を設けたが、各車輪速センサの検出値に基づいて公知の方法で演算により算出してもよい。つまり、車速センサ51は、別途を検出素子を設けずに、車輪速センサ50の結果から演算のみで車速を算出するようにしてもよい。
【0058】
次に、図3を用いて、ECU41による各部の制御について説明する。ECU41は、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51と接続しており、各センサで検出した検出値を受け取る(受信する)。また、ECU41は、エンジン12およびブレーキ油圧回路27と接続しており、各センサで検出した検出値に基づいてエンジン12およびブレーキ油圧回路27の動作を制御する。ここで、ECU41は、挙動検出部62と挙動判定部64と制動力制御部66とエンジン制御部68とを有する。なお、以下では、ECU41による、制駆動動作、主に制動動作の制御について説明するが、ECU41は、並行して車両11の走行で行う各種制御も行う。
【0059】
挙動検出部62は、主にヨーレイトセンサ44の検出値に基づいて、車両11の挙動を検出する。挙動検出部62は、ヨーレイトセンサ44の検出結果に基づいて、実ヨーレイト(実旋回状態量)を検出する。ここで、実ヨーレイトとは、車両11に作用しているヨーレイトである。なお、挙動検出部62は、前後Gセンサ42と横Gセンサ43との少なくとも一つ検出値も加味して、実ヨーレイト(実旋回状態量)を検出してもよい。また、本実施形態では実ヨーレイトをヨーレイトセンサ44により検出したが、実ヨーレイトの検出方法はこれに限定されない。
【0060】
挙動判定部64は、車両11の挙動を判定する。挙動判定部64は、まず操舵角センサ45で検出した操舵角に基づいて、目標ヨーレイト(目標旋回状態量)を算出する。ここで、目標ヨーレイトとは、走行条件、入力操作等に基づいて算出される車両11に作用していると想定されるヨーレイトである。つまり、目標ヨーレイトは、入力された条件に基づいて算出されるヨーレイトである。なお、挙動判定部64は、操舵角センサ45の検出結果に加え、ブレーキストロークセンサ47の検出結果も加味して目標ヨーレイトを検出してもよい。
【0061】
挙動判定部64は、挙動検出部62で検出した実ヨーレイトと、算出した目標ヨーレイトとの差分を検出し、ヨーレイトの偏差、つまり目標ヨーレイトと実ヨーレイトとのずれを検出する。挙動判定部64は、さらに、検出したヨーレイトの偏差に基づいて車両11の挙動を判定する。ここで、挙動判定部64は、ヨーレイトの偏差の数値範囲を複数記憶しており、検出したヨーレイトの偏差がその数値範囲に入るかを判定する。本実施形態の挙動判定部64は、車両11がオーバーステアである場合のヨーレイトの偏差の数値範囲と、車両11がアンダーステアである場合のヨーレイトの偏差の数値範囲とを記憶している。なお、オーバーステアとは、実ヨーレイトが目標ヨーレイトよりも大きい場合、つまり車両11が目標よりも曲がっている(旋回量が多い)場合であり、アンダーステアとは、目標ヨーレイトが実ヨーレイトよりも大きい場合つまり車両11が目標よりも曲がっていない(旋回量が少ない)場合である。
【0062】
本実施形態の挙動判定部64は、車両11がオーバーステアである場合のヨーレイトの偏差の数値範囲を3種類記憶しており、車両11がアンダーステアである場合のヨーレイトの偏差の数値範囲を3種類記憶している。具体的には、挙動判定部64は、オーバーステアである場合の数値範囲として、第1オーバーステア挙動の数値範囲と第2オーバーステア挙動の数値範囲と第3オーバーステア挙動の数値範囲とを記憶している。ここで、第1オーバーステア挙動の数値範囲は、第2オーバーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲であり、第2オーバーステア挙動の数値範囲は、第3オーバーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲である。また、挙動判定部64は、アンダーステアである場合の数値範囲として、第1アンダーステア挙動の数値範囲と第2アンダーステア挙動の数値範囲と第3アンダーステア挙動の数値範囲とを記憶している。ここで、第1アンダーステア挙動の数値範囲は、第2アンダーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲であり、第2アンダーステア挙動の数値範囲は、第3アンダーステア挙動の数値範囲よりもヨーレイトの偏差が大きい数値範囲である。なお、第1オーバーステア挙動の数値範囲および第1アンダーステア挙動の数値範囲のヨーレイト偏差の上限値は、基本的に、車両11で想定されるヨーレイト偏差の最大値よりも大きい値である。なお、第1オーバーステア挙動の数値範囲および第1アンダーステア挙動の数値範囲のヨーレイト偏差の上限値は設定しなくてもよい、つまり無限大を上限値としてもよい。
【0063】
制動力制御部66は、挙動判定部64で検出(判定)したヨーレイトの偏差または挙動判定部64で特定された数値範囲に基づいて、制動装置、具体的にはブレーキ油圧回路27の動作を制御し、各車輪に加える制動力を制御する。
【0064】
エンジン制御部68は、挙動判定部64で検出したヨーレイトの偏差または挙動判定部64で特定された数値範囲に基づいて、エンジン12の駆動量を制御する。
【0065】
次に、図4を用いて本実施形態の車両の制駆動力制御装置20による処理の流れを説明する。ここで、図4は、制駆動力制御装置による処理の流れを表すフロー図である。なお、図4は、車両11の挙動としてオーバーステアが検出された場合の処理の一例を示している。また、制駆動力制御装置20による処理は、基本的にECU41の制御により実行される。
【0066】
まず、ECU41は、ステップS12として、挙動判定部64で車両11の挙動を検出する。つまり、ECU41は、挙動判定部64によりヨーレイトセンサ44での検出結果に基づいて実ヨーレイトを検出する。ECU41は、ステップS12で車両11の挙動を検出したら、ステップS14として、挙動判定部64で車両11の挙動を判定する。つまり、ECU41は、挙動判定部64により、ステップS12で検出した実ヨーレイトと算出した目標ヨーレイトとの差分であるヨーレイトの偏差を検出し、検出したヨーレイトの偏差が第1オーバーステア挙動の数値範囲か、第2オーバーステア挙動の数値範囲か、第3オーバーステア挙動の数値範囲か、いずれの数値範囲にも含まれないかを判定する。
【0067】
その後、ECU41は、ステップS16として、挙動判定部642第1オーバーステア挙動(第1OS挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれているかを判定する。
【0068】
ECU41は、ステップS16で第1OS挙動である(Yes)、つまりヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS18として、前後制動力制御を実行する。ここで、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させる制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25a〜25dのホイールシリンダ圧の圧力を高くし、ディスクブレーキユニット21FR〜21RLから各車輪FR〜RLに制動力を付与する。このように、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させ、車両11を減速させる制御である。なお、制動力制御部66は、前後制動力制御において、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する制動力を算出すればよい。制動力制御部66は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。ECU41は、ステップS18の処理を行ったらステップS12に進む。
【0069】
ECU41は、ステップS16で第1OS挙動ではない(No)、つまりヨーレイトの偏差が第1オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS20として、挙動判定部64で第2オーバーステア挙動(第2OS挙動)であるかを判定する。つまり、ECU41は、挙動検出部62により検出したヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれているかを判定する。
【0070】
ECU41は、ステップS20で第2OS挙動である(Yes)、つまりヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS22として、モーメントコントロールを実行する。ここで、モーメントコントロールとは、前輪の2つの車輪FL,FRに作用させる制動力を調整する制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25c、25dのホイールシリンダ圧の圧力を調整し、ディスクブレーキユニット21FRが車輪FRに付与する制動力とディスクブレーキユニット21FLが車輪FLに付与する制動力とを調整する。制動力制御部66は、例えば、実ヨーレイトが目標ヨーレイトよりも大きいオーバーステア状態、つまり曲がりすぎの状態であるため、旋回方向の外側の車輪(外輪)に付与する制動力を旋回方向内側の車輪(内輪)に付与する制動力よりも大きくする。このように制動力を調整することで、車両11が曲がりすぎている状態(旋回しすぎている)を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。なお、制動力制御部66は、モーメントコントロールにおいて、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する2つの前輪に付与する制動力を算出すればよい。ECU41は、ステップS22の処理を行ったらステップS12に進む。
【0071】
ECU41は、ステップS20で第2OS挙動ではない(No)、つまりヨーレイトの偏差が第2オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS24として、挙動判定部64で第3オーバーステア挙動(第3OS挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれているかを判定する。
【0072】
ECU41は、ステップS24で第3OS挙動である(Yes)、つまりヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれていると判定したら、ステップS26として、駆動力制限を実行する。ここで、駆動力制限とは、エンジン12の駆動力を制御し、エンジントルクにより制動力を発生させる制御である。なお、ECU41は、駆動力制限の制御時に、さらにブレーキ油圧回路27を作動させ後輪の2輪に制動力を作用させ、車輪をスリップさせるようにしてもよい。このようにエンジントルクにより制動力を付与することで、車輪に作用している駆動力を路面に伝達しやすくすることで、車両11が曲がりすぎている状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。ECU41は、ステップS24の処理を行ったらステップS12に進む。
【0073】
次に、ECU41は、ステップS24で第3OS挙動ではない(No)、つまりヨーレイトの偏差が第3オーバーステア挙動の数値範囲に含まれていないと判定したら、ステップS28として、挙動制御をリセットする。つまり、ECU41は、ステップS24でNoとなる場合は、第1OS挙動、第2OS挙動、第3OS挙動のいずれにも含まれていない状態であり、車両11の挙動として設定された数値範囲のオーバーステアが発生していないと判定し、挙動制御(ステップS18、ステップS22、ステップS26の制御)を終了する。なお、ECU41は、挙動制御を行っていない場合、そのまま次の処理に進む。
【0074】
ECU41は、ステップS28の処理を行ったら、ステップS30として、制御終了であるかを判定する。つまり、ECU41は、制駆動力制御装置20による制御を終了するかを判定する。なお、制駆動力制御装置20は、例えばパーキングブレーキにより車両11が停止している場合やエンジン12が停止している場合等、車両11が走行しない状態である場合に制御を終了すると判定する。ECU41は、ステップS30で処理を終了しない(No)と判定したら、ステップS12に進む。また、ECU41は、ステップS30で制御終了(Yes)と判定したら、本処理を終了する。
【0075】
制駆動力制御装置20は、車両11の挙動であるヨーレイトの偏差の値、本実施形態ではオーバーステアの大きさに基づいて実行する車両11の挙動の制御を切り換えることで、車両11の挙動に適した制御を実行することができる。これにより、本実施形態のように制動力を3系統で制御する構成(後輪の制動力を1つの油圧系統で制御する構成)でも、オーバーステアを抑制し、車両11の挙動を安定させることができる。つまり制駆動力制御装置20は、ヨーレイトの偏差に応じて、4つの車輪の全ての制動力を調整する制御(減速を優先させる制御)と前輪の制動力のみを調整する制御(ヨーレイトの偏差の低減を優先させる制御)とを切り換えることで車両11の挙動を安定させることができる。
【0076】
本実施形態では、オーバーステアが最も大きい範囲である第1OS挙動である場合は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。また、オーバーステアが第1OS挙動よりも小さい第2OS挙動である場合は、前輪の2輪のそれぞれに付与する制動力を調整し、左右の制動力差によるモーメントコントロールを行うことで、オーバーステアを抑制することができる。また、オーバーステアが第2OS挙動よりも小さい第3OS挙動である場合は、制動装置22ではなくエンジン12のエンジントルクにより車両11の加速度を減少させる(つまりエンジンブレーキにより減速させる、加速量を低減させる)ことで、車輪の力が路面に伝達しやすい状態とすることができ、オーバーステアを抑制することができる。
【0077】
また、制駆動力制御装置20は、オーバーステアが小さくなるに従って、第1OS挙動の制御、第2OS挙動の制御、第3OS挙動の制御に順次切り替わる。これにより、減速を優先させる制御を行う場合でも、オーバーステアが一定程度小さくなったら、ヨーレイトの偏差の低減を優先させる制御に切り替わる。これにより、制動装置22により制動力を作用させて減速した場合でも一定程度減速されたら、制動力の付与が低減または無くなり、走行状態を維持することができる。
【0078】
このように、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成では十分にモーメントコントロールができない第1OS挙動の場合は、車両を減速させることでオーバーステアを抑制することができる。また、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成でも十分にモーメントコントロールができる第2OS挙動の場合は、モーメントコントロールでオーバーステアを抑制することができる。また、制駆動力制御装置20は、左右の制動力差でモーメントコントロールするまでもない第3OS挙動の場合は、エンジントルクを制御することで、オーバーステアを抑制することができる。
【0079】
次に、図5を用いて本実施形態の車両の制駆動力制御装置20による他の処理の流れを説明する。ここで、図5は、制駆動力制御装置による処理の流れを表すフロー図である。なお、図5は、車両11の挙動としてアンダーステアが検出された場合の処理の一例を示している。また、制駆動力制御装置20による処理は、基本的にECU41の制御により実行される。
【0080】
まず、ECU41は、ステップS42として、挙動検出部62で車両11の挙動を検出する。つまり、ECU41は、挙動検出部62によりヨーレイトセンサ44での検出結果に基づいて実ヨーレイトを検出する。ECU41は、ステップS42で車両11の挙動を検出したら、ステップS44として、挙動判定部64で車両11の挙動を判定する。つまり、ECU41は、挙動判定部64により、ステップS42で検出した実ヨーレイトと算出した目標ヨーレイトとの差分であるヨーレイトの偏差を検出し、検出したヨーレイトの偏差が第1アンダーステア挙動の数値範囲か、第2アンダーステア挙動の数値範囲か、第3アンダーステア挙動の数値範囲か、いずれの数値範囲にも含まれないかを判定する。
【0081】
その後、ECU41は、ステップS46として、挙動判定部64で第1アンダーステア挙動(第1US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれているかを判定する。
【0082】
ECU41は、ステップS46で第1US挙動である(Yes)、つまりヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS48として、前後制動力制御を実行する。ここで、前後制動力制御とは、4つの車輪FL,FR,RL,RRの全てに制動力を作用させる制御である。なお、前後制動力制御は、上述したステップS18の前後制動力制御と同様の制御である。制動力制御部66は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。ECU41は、ステップS48の処理を行ったらステップS42に進む。
【0083】
ECU41は、ステップS46で第1US挙動ではない(No)、つまりヨーレイトの偏差が第1アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS50として、挙動判定部64で第2アンダーステア挙動(第2US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれているかを判定する。
【0084】
ECU41は、ステップS50で第2US挙動である(Yes)、つまりヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS52として、後輪2輪の制動力制御を実行する。ここで、後輪2輪の制動力制御とは、後輪の2つの車輪RL,RRに制動力を付与する制御である。具体的には、ECU41は、ブレーキ油圧回路27によりホイールシリンダ25a、25bのホイールシリンダ圧の圧力を増加し、ディスクブレーキユニット21RRが車輪RRに付与する制動力とディスクブレーキユニット21RLが車輪RLに付与する制動力とを増加する。制動力制御部66は、後輪の2つの車輪に制動力を付与することで車両11を減速させることができる。これにより、前輪の2つの車輪が操舵されることで車両に付与する横力によって車両11が曲がりやすい状態とすることができ、旋回量を大きくすることができる。このように後輪の2つの車輪に制動力を付与することで、車両11が曲がっていない状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。なお、制動力制御部66は、後輪2輪の制動力制御において、前後Gセンサ42と横Gセンサ43とヨーレイトセンサ44と操舵角センサ45とブレーキストロークセンサ47とマスタシリンダ圧センサ48と車輪速センサ50と車速センサ51との検出値のうち適宜必要な検出値を用いて付与する2つの後輪に付与する制動力を算出すればよい。ECU41は、ステップS52の処理を行ったらステップS42に進む。
【0085】
ECU41は、ステップS50で第2US挙動ではない(No)、つまりヨーレイトの偏差が第2アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS54として、挙動判定部64で第3アンダーステア挙動(第3US挙動)であるかを判定する。つまり、ECU41は、挙動判定部64により検出したヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれているかを判定する。
【0086】
ECU41は、ステップS54で第3US挙動である(Yes)、つまりヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれていると判定したら、ステップS56として、駆動力制限を実行する。ここで、駆動力制限は、上述したステップS26の制御と同様である。このようにエンジントルクにより制動力を付与することで、車輪に作用している駆動力を路面に伝達しやすくすることで、車両11が曲がっていない状態を解消することができ、目標ヨーレイトと実ヨーレイトとの偏差を小さくすることができる。ECU41は、ステップS56の処理を行ったらステップS42に進む。
【0087】
次に、ECU41は、ステップS54で第3US挙動ではない(No)、つまりヨーレイトの偏差が第3アンダーステア挙動の数値範囲に含まれていないと判定したら、ステップS58として、挙動制御をリセットする。つまり、ECU41は、ステップS54でNoとなる場合は、第1US挙動、第2US挙動、第3US挙動のいずれにも含まれていない状態であり、車両11の挙動として設定された数値範囲のアンダーステアが発生していないと判定し、挙動制御(ステップS48、ステップS52、ステップS56の制御)を終了する。なお、ECU41は、挙動制御を行っていない場合、そのまま次の処理に進む。
【0088】
ECU41は、ステップS58の処理を行ったら、ステップS60として、制御終了であるかを判定する。ECU41は、ステップS60で処理を終了しない(No)と判定したら、ステップS42に進む。また、ECU41は、ステップS60で制御終了(Yes)と判定したら、本処理を終了する。
【0089】
制駆動力制御装置20は、車両11の挙動であるヨーレイトの偏差の値、本実施形態ではアンダーステアの大きさに基づいて実行する車両11の挙動の制御を切り換えることで、車両11の挙動に適した制御を実行することができる。これにより、本実施形態のように制動力を3系統で制御する構成(後輪の制動力を1つの油圧系統で制御する構成)でも、アンダーステアを抑制し、車両11の挙動を安定させることができる。つまり制駆動力制御装置20は、ヨーレイトの偏差に応じて、4つの車輪の全ての制動力を調整する制御(減速を優先させる制御)と、後輪の制動力のみを調整する制御(ヨーレイト偏差の低減を優先させる制御)とを切り換えることで車両11の挙動を安定させることができる。
【0090】
本実施形態では、アンダーステアが最も大きい範囲である第1US挙動である場合は、前輪の2輪と後輪の2輪、つまり4つの車輪の全てに制動力を付与し車両11を減速させることで車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。また、アンダーステアが第1US挙動よりも小さい第2US挙動である場合は、後輪の2輪に制動力を付与することで、車両11を曲がりやすくすることができアンダーステアを抑制することができる。また、アンダーステアが第2US挙動よりも小さい第3US挙動である場合は、制動装置22ではなくエンジン12のエンジントルクにより車両11の加速度を減少させる(減速させる、加速量を低減する)ことで、車輪の力が路面に伝達しやすい状態とすることができ、アンダーステアを抑制することができる。
【0091】
このように、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成では、モーメントコントロールができない第1US挙動の場合は、車両を減速させることでアンダーステアを抑制することができる。また、制駆動力制御装置20は、制動力を3系統で制御し左右の制動力差を前輪の左右輪のみで制御する構成でも十分にモーメントコントロールができる第2US挙動の場合は、後輪2輪の制動力制御でアンダーステアを抑制することができる。また、制駆動力制御装置20は、後輪2輪の制動力を付与するまでもない第3US挙動の場合は、エンジントルクを制御することで、アンダーステアを抑制することができる。また、第3US挙動の場合は、ブレーキ油圧回路27を駆動させずにアンダーステアを抑制できるため車両11の制御が簡単になる。
【0092】
また、制駆動力制御装置20は、アンダーステアが小さくなるに従って、第1US挙動の制御、第2US挙動の制御、第3US挙動の制御に順次切り替わる。これにより、減速を優先させる制御を行う場合でも、アンダーステアが一定程度小さくなったら、ヨーレイトの偏差の低減を優先させる制御に切り換わる。これにより、制動装置22により制動力を作用させて減速した場合でも一定程度減速されたら、制動力の付与が低減または無くなり、走行状態を維持することができる。
【0093】
なお、図5に示すようにアンダーステアを制御する場合、制駆動力制御装置20は、前輪の2つの車輪に付与する制動力を調整し、左右の車輪に付与する制動力に差を与え、モーメントコントロールを行うことが好ましい。このように、前輪の2つの車輪に付与する制動力でモーメントコントロールを行うことで、車両11の挙動をより適切に制御することができ、アンダーステアを抑制することができる。なお、前輪の2つの車輪に付与する制動力でモーメントコントロールを行う制御は、第1US挙動の場合の制御、第2US挙動の場合の制御、第3US挙動の制御のいずれの場合でも実行することが好ましい。
【0094】
また、図5に示すようにアンダーステアを制御する場合、上記実施形態では第1US挙動の場合の制御と第2US挙動の場合との2つの場合に分けたがこれに限定されない。制駆動力制御装置20は、ヨーレイトの偏差の大きさ、つまりアンダーステアの大きさに基づいて第1US挙動の場合の制御と第2US挙動の場合の制御とで前輪の2つの車輪に付与する制動力と、後輪の2つの車輪に付与する制動力のバランス(比)を調整するようにしてもよい。具体的には、アンダーステアの大きさが大きくなるに従って前輪に付与する制動力の大きさを大きくするようにしてもよい。このように、アンダーステアの大きさに基づいて前輪と後輪に付与する制動力のバランスを調整することで、車両11の挙動つまりアンダーステアをより適切に抑制することができる。この場合は、第1US挙動の場合に前輪と後輪に付与する制動力のバランスを調整すればよい。
【0095】
また、本実施形態では、駆動源としてエンジン12を用いているため、第3OS挙動、第3US挙動の場合に、エンジントルクを制御して駆動力の制限を実行したが、駆動源としてエンジン以外を用いる場合も駆動源の駆動力を制限すればよい。つまり、モータの場合はモータの出力を制限(低減)すればよい。
【0096】
また、制駆動力制御装置20は、図4に示す処理と、図5に示す処理の両方を並列で実行することが好ましいが、いずれか一方の処理のみを実行してもよい。
【0097】
ここで、制駆動力制御装置20は、第1OS挙動の場合の制御と第1US挙動の場合の制御として4つの車輪に付与する制動力としては、種々の値の制動力とすることができるが、最大の制動力を付与することが好ましい。これにより、オーバーステア、アンダーステアが大きい場合に車両11を迅速に減速させることができ、車両11の挙動をより迅速に安定化することができる。
【0098】
また、上記実施形態では、第2US制御として後輪2輪の制動力を制御したが、後輪2輪に加え、前輪の一方の車輪の制動力も制御してもよい。つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力を調整し、4つの車輪のうち3つの車輪に付与する制動力を調整してもよい。なお、制駆動力制御装置20は、第2US制御として後輪2輪の制動力に換えて、前輪の一方の車輪と後輪2輪の制動力の制御を行うことに限定されない。制駆動力制御装置20は、車両の挙動によって、前輪、後輪の前輪の制動力を調整する制御と、前輪の一方と後輪の制動力を調整する制御と、後輪の制動力を調整する制御とを、切り換えるようにしてもよい。例えば、制駆動力制御装置20は、第2US制御として、アンダーステアの値によりさらに実行する制御を切り換えるようにしてもよく、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力(つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力)を調整し、アンダーステアが一定値未満の場合は、後輪の制動力(第3制動力調整部で制動力)を調整してもよい。また、単に、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力(つまり、第1制動力調整部と第2制動力調整部のいずれか一方と第3制動力調整部とで制動力)を調整し、アンダーステアが一定値未満の場合は、後輪の制動力(第3制動力調整部で制動力)を調整してもよい。つまり、4つの車輪の全ての制動力を調整する制御を行わずに、アンダーステアの値に応じて4つの車輪のうち3つの車輪に付与する制動力を調整する制御モードと、後輪2輪の制動力を調整する制御モードを選択するようにしてもよい。
【0099】
また、制駆動力制御装置20は、第1OS挙動の場合の制御、第2OS挙動の場合の制御、第1US挙動の場合の制御及び第2US挙動の場合の制御として、さらに駆動力制限を行うようにしてもよい。これにより、制動装置22による制動力の制御に加え、車両11を減速させることができ、車両11の挙動をより迅速に安定化することができる。
【0100】
また、上記実施形態では、第3OS挙動、第3US挙動の場合に、駆動力制限を制御して車両の挙動を制御したが、エンジントルクの制御は必ずしも行わなくてもよい。つまり、第1OS挙動の場合の制御と第2OS挙動の場合の制御のみ、また、第1US挙動の場合の制御、第2US挙動の場合の制御のみを行ってもよい。
【符号の説明】
【0101】
11 車両
12 エンジン
20 制駆動力制御装置
22 制動装置
41 電子制御ユニット(ECU)
62 挙動検出部
64 挙動判定部
66 制動力制御部
68 エンジン制御部
【特許請求の範囲】
【請求項1】
車両の制駆動力を制御する制駆動力制御装置であって、
前輪の右輪の制動力を調整する第1制動力調整部と、
前輪の左輪の制動力を調整する第2制動力調整部と、
後輪の左右輪の制動力を同時に調整する第3制動力調整部と、
前記車両の実旋回状態量を検出する挙動検出部と、
前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両の挙動を判定する挙動判定部と、
前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする制駆動力制御装置。
【請求項2】
前記制御部は、前記目標旋回状態量と前記実旋回状態量との差が第1閾値以上である場合は前記第1制御モードで制動力を調整し、前記目標旋回状態量と前記実旋回状態量との差が第1閾値未満第2閾値以上である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項1に記載の制駆動力制御装置。
【請求項3】
前記挙動判定部は、前記車両の挙動としてオーバーステアの状態を判定し、
前記制御部は、前記オーバーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記オーバーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項2に記載の制駆動力制御装置。
【請求項4】
前記制御部は、前記第2制御モードで、前輪の制動力を調整することを特徴とする請求項3に記載の制駆動力制御装置。
【請求項5】
前記挙動判定部は、前記車両の挙動としてアンダーステアの状態を判定し、
前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項2に記載の制駆動力制御装置。
【請求項6】
前記制御部は、前記第2制御モードで、後輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項7】
前記制御部は、前記第2制御モードで、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項8】
前記制御部は、前記第2制御モードで、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整し、アンダーステアが一定値未満の場合は、後輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項9】
前記挙動判定部は、前記目標旋回状態量と前記実旋回状態量との差が第2閾値未満第3閾値以上である場合は、駆動源の駆動力を低減させて制駆動力を調整する第3制御モードで駆動力を調整することを特徴とする請求項2から8のいずれか一項に記載の制駆動力制御装置。
【請求項10】
車両の制駆動力を制御する制駆動力制御装置であって、
前輪の右輪の制動力を調整する第1制動力調整部と、
前輪の左輪の制動力を調整する第2制動力調整部と、
後輪の左右輪の制動力を同時に調整する第3制動力調整部と、
前記車両の実旋回状態量を検出する挙動検出部と、
前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両のアンダーステアの状態を判定する挙動判定部と、
前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部のいずれか一方および前記第3制動力調整部で前輪の一方及び後輪の制動力を調整する第1制御モードと、前記第3制動力調整部で後輪の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする制駆動力制御装置。
【請求項11】
前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項10に記載の制駆動力制御装置。
【請求項1】
車両の制駆動力を制御する制駆動力制御装置であって、
前輪の右輪の制動力を調整する第1制動力調整部と、
前輪の左輪の制動力を調整する第2制動力調整部と、
後輪の左右輪の制動力を同時に調整する第3制動力調整部と、
前記車両の実旋回状態量を検出する挙動検出部と、
前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両の挙動を判定する挙動判定部と、
前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、前記第1制動力調整部と前記第2制動力調整部と前記第3制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする制駆動力制御装置。
【請求項2】
前記制御部は、前記目標旋回状態量と前記実旋回状態量との差が第1閾値以上である場合は前記第1制御モードで制動力を調整し、前記目標旋回状態量と前記実旋回状態量との差が第1閾値未満第2閾値以上である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項1に記載の制駆動力制御装置。
【請求項3】
前記挙動判定部は、前記車両の挙動としてオーバーステアの状態を判定し、
前記制御部は、前記オーバーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記オーバーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項2に記載の制駆動力制御装置。
【請求項4】
前記制御部は、前記第2制御モードで、前輪の制動力を調整することを特徴とする請求項3に記載の制駆動力制御装置。
【請求項5】
前記挙動判定部は、前記車両の挙動としてアンダーステアの状態を判定し、
前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項2に記載の制駆動力制御装置。
【請求項6】
前記制御部は、前記第2制御モードで、後輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項7】
前記制御部は、前記第2制御モードで、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項8】
前記制御部は、前記第2制御モードで、アンダーステアが一定値以上の場合は、後輪の制動力及び前輪のいずれか一方の車輪の制動力を調整し、アンダーステアが一定値未満の場合は、後輪の制動力を調整することを特徴とする請求項5に記載の制駆動力制御装置。
【請求項9】
前記挙動判定部は、前記目標旋回状態量と前記実旋回状態量との差が第2閾値未満第3閾値以上である場合は、駆動源の駆動力を低減させて制駆動力を調整する第3制御モードで駆動力を調整することを特徴とする請求項2から8のいずれか一項に記載の制駆動力制御装置。
【請求項10】
車両の制駆動力を制御する制駆動力制御装置であって、
前輪の右輪の制動力を調整する第1制動力調整部と、
前輪の左輪の制動力を調整する第2制動力調整部と、
後輪の左右輪の制動力を同時に調整する第3制動力調整部と、
前記車両の実旋回状態量を検出する挙動検出部と、
前記車両の目標旋回状態量を算出し、当該目標旋回状態量と前記実旋回状態量とを比較し、前記車両のアンダーステアの状態を判定する挙動判定部と、
前記挙動判定部で判定した結果に基づいて、前記第1制動力調整部と前記第2制動力調整部のいずれか一方および前記第3制動力調整部で前輪の一方及び後輪の制動力を調整する第1制御モードと、前記第3制動力調整部で後輪の制動力を調整する第2制御モードとを切り換える制御部と、を備えることを特徴とする制駆動力制御装置。
【請求項11】
前記制御部は、前記アンダーステアが閾値以上である場合は前記第1制御モードで制動力を調整し、前記アンダーステアが閾値未満である場合は、前記第2制御モードで制動力を調整することを特徴とする請求項10に記載の制駆動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−166701(P2012−166701A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−29618(P2011−29618)
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]