
刺激的な運動のための方法及び装置
【課題】ストレスを減少させる、休養を向上させる、多感覚の処理、調整および認識能力を向上させる物理的および感覚的治療の治療的介入と同様に、前庭、聴覚、視覚、触覚、圧迫、神経筋肉の刺激及び運動の刺激を提供可能な多感覚応用の刺激装置を提供する。
【解決手段】多感覚刺激を実行するための装置は、参加者を支えるためのサポートプラットホーム(32)を備える。水平線形アクチュエータ(11)は水平軸上にサポートプラットホーム(32)を動かす。垂直線形アクチュエータ(6)は、垂直軸上にサポートプラットホーム(32)を動かす。感覚前庭入力は、2つの独立な軸でサポートプラットホームを動かすことによって提供され、制御の水平軸と垂直軸は、最上の任意の二重軸動作プロファイルの中に挿入される。
【解決手段】多感覚刺激を実行するための装置は、参加者を支えるためのサポートプラットホーム(32)を備える。水平線形アクチュエータ(11)は水平軸上にサポートプラットホーム(32)を動かす。垂直線形アクチュエータ(6)は、垂直軸上にサポートプラットホーム(32)を動かす。感覚前庭入力は、2つの独立な軸でサポートプラットホームを動かすことによって提供され、制御の水平軸と垂直軸は、最上の任意の二重軸動作プロファイルの中に挿入される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運動装置、運動の方法及びシステムの分野に関し、これらは利用者が感覚系と運動系の両方を同時に同期して、運動することを可能とする。本発明は、さらに感覚刺激変数の用途の中に変化を機器またはオペレータが作ることを導き、バイオフィードバック、生理学的モニタリング、および再評価手順を通して導かれる。これらの感覚刺激変数は、前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激を含む。
【背景技術】
【0002】
システムは、感覚刺激の目的のため作られたが、視覚、嗅覚及び聴覚系の刺激変数のために設計された(特許文献1参照)。これらのシステムは、気分効用、ストレス解放、ある場合では治療上の用途と同様に娯楽のためである。これらのシステムの応用の方法は、主に異なった刺激環境を生成するために設計されている。これらのシステムは、非常に特別な多感覚運動手続きで結合されるため、前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激の結合した感覚及び運動入力を可能にしない。従って、ストレスを減少させる、休養を向上させる、多感覚の処理、調整および認識能力を向上させる物理的および感覚的治療の治療的介入と同様に娯楽目的のため、前庭、聴覚、視覚、触覚、圧迫、神経筋肉の刺激及び運動の刺激を提供可能な多感覚応用の刺激装置とこれらの刺激変数の応用の方法とに需要がある。
【0003】
【特許文献1】米国特許 6、702、767号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は多感覚刺激システム及びそのようなシステムの使用方法であり、システムは、先行技術の感覚刺激装置の欠点を解決するように設計され、さらに、運動変数として前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激、バイオフィードバック及び視聴覚の同調/神経刺激を使用している柔軟な、個人にあわせた多感覚刺激プログラムが適応されたものであり、多感覚刺激プログラム開発のための上記変数の応用の方法でもある。
【課題を解決するための手段】
【0005】
定義
この実施例の目的のため:
「システム制御」は、視覚、聴覚、動作、圧迫、振動、電気刺激、グラフィックディスプレイ出力及び生理学的反応センサを含んでいるシステムの制御および/または記録を含んでいるカテゴリとして定義される。
「運動」刺激は、動作運動と定義される。
「二重動作」プラットホームは、お互いに取り付けられた上部動作プラットホームと下部回転動作プラットホームと言及される。
【0006】
システムは、水平軸まわりでの回転平面動作、純粋な線形動作またはU字型前庭刺激パタンを提供する第2の上部動作プラットホームと同様に、垂直軸まわりでの回転平面動作の前庭刺激を提供する二重動作プラットホームを含んでおり、カスタムプロファイルは、好ましい動作の組み合わせの中ですべての3つの軸をプログラミングすることによって結合されることができる。ある実施形態の中で、刺激変数(触覚、圧迫、運動及び神経の刺激)のいくつかと同様に垂直軸まわりでの回転動作プラットホームは排除される。システムは一意に設計され、マスタ制御システムが回転プラットホームに固定されているのと同様に、視覚光学ライト機器は下部回転動作プラットホームに取り付けられる関節アームと取付ポールに定着され、1つのように動き、両者は手動的にシステムの制御と安全機能にアクセスを可能としている間、オペレータと参加者を直列に一緒に動かすことを可能とする整流リングを通して動力を供給する。オペレータは制御パネルにアクセスする2つの座席のサイトのうちの1つに座っている。制御パネルは、回転プラットホームに取り付けられたポールと関節アームに定着され、前記関節アームと同様に取り付けられたコンピュータモニタ、コンピュータシステムとキーボードを持っている。オペレータは関節アームを旋回することが可能で、それによって、制御パネル、コンピュータシステム、キーボードとモニタを視線の列に置くことができる。
【0007】
視覚光学ライト機器は、関節アームに付けられた回転軸のまわりで光を回転させるか、位置のために関節アームを動かすことによって、参加者の視線の列に置かれる。視覚光学ライト機器は、第1のマスタ制御システムまたは第2の制御システムを通して制御されるLED球を有する。光は参加者の頭上に置かれて、任意の筐体の中に囲まれない視覚経験における要因である環境変数を可能とする。視覚光学ライト機器は、色つきレンズとそれらの背後のガラス拡散体を有する円形である。視覚とき、マスクは異なる形状をつくるために視覚光学ライト機器の上にオプションで適用される。光に適用されるプログラムは、第1のマスタ制御システムまたは第2の制御システムで予めプログラムされる。様々な視覚刺激プログラムは、視覚追跡シーケンス、カラースペクトルの一端で始まり他端で終わるカラーシーケンス、または視覚光学ライト機器のある位置での参加者の色で変化する。視覚光学ライト機器の設置は、参加者に影響と衝撃を及ぼして、参加者の頭上の水平面のどんな位置にでも置かれることができ、それは下に傾けられることもでき、座った位置で参加者を視線の位置と平行のままにできる。視覚光学ライト機器に加えて、視線に置かれることができるビデオモニタまたは認識と実行運動と同様にバイオフィードバック運動のため彼らの目の上に置かれるビデオヘッドセットがある。
【0008】
サポートプラットホームは上部運動プラットホームに取り付けられて、背骨の下部、上部の左肩、上部の右肩、下部の左大腿と下部の右大腿に置かれた最低5台の変換器を含む。これは、オペレータの検出と推薦に基づいて適用される各変換器の個々の選択を可能と視、ある実施形態ではこの特徴は除外される。変換器は外部アンプから電力供給され、第1のマスタ制御システム、第2の制御システムまたは任意の外部音声再生装置から、サウンドジャックに対する入力を受ける。機能的に、変換器はサウンドファイルを通して動かされ、あるサウンドファイルは、音、光およびサポート経験が統合され、望ましい反応が特定されるような光プログラムと関連している特別なサウンドファイルを有する。
【0009】
マスタ制御オペレーティングシステムは、参加者が光と音のプログラムの選択と実行を可能とするGUIグラフィカルユーザインタフェースを含む。動作制御が自動モードとして選択されたとき、サウンドファイルはWAVファイルであり、動作制御と同様に光プログラムのためマスタタイムコードソースとして働く。一旦サウンドファイルが選択されると、参加者の頭の後に取り付けられたヘッドフォン、振動変換器またはスピーカに出力される。自動モードで、動作制御ファイルがMIDIファイルの時、一度選択されたファイルはアナログ信号に変換され、動作制御命令のため動作コントローラに送られ、動作制御ファイルはサウンドファイルに対する従属と見なされる。光プログラムはMIDIファイルで、ファイルライブラリに保存され、一旦GUIによって選択されたら、それらはdmxファイルにソフトウェアコードによって変換され、オペレーターからアプリケーションの方法に基づいて選択される。それから、LEDを動かすために視覚光学ライト機器に送られ、それらは、マスタサウンドファイルに対する従属ファイルと見なされる。
【0010】
感覚刺激システムは、下部と下部の二重動作制御プラットホームの方向と速度を独立に制御することを可能とする備え付けられているHMI−人間機械インターフェースに関する動作の手動制御を有する。追加で、動作コントローラは、勘定が釣り合っていないときに発生し、動作を不可能にする1時間ごとのカウントログを許す。さらに手動制御は、圧迫、神経筋肉の刺激、視聴覚同調/神経刺激、EEGおよびバイオフィードバックセンサのアプリケーションのために存在し、これらの制御は、この装置から感覚刺激のアプリケーションの方法の一部として評価と検出に基づいて選択される。
【0011】
現在の発明はしたがって、方法と装置を開示し、この装置は臨床的検出と方法の応用に基づいたバイオフィードバック入力、評価検出およびデシジョンツリーを通してさらに伝えられる運動として、感覚刺激と運動刺激を提供する。
【0012】
運動の方法は、異なった種類の感覚と運動の刺激を可能とする同期プロセスおよび前記刺激と同時に行われる反応と同時に、参加者の感覚と運動系を訓練することをユーザに可能とし、その結果ユーザの感覚と運動系が訓練される。同期プロセスは、空間に装置の位置を結合するマスタ制御システムによって実行され、同期して感覚と運動のための装置変数のいくつかの制御を可能とする。同期システムは、いくつかの異なるモードで運動の同期を実行する。
1)オペレータ−ユーザは命令セットを定義し、
2)予めプログラムされた運動プロトコルと、
3)バイオフィードバック、これは、以下の1つまたは複数の手動または自動反応を含むことができる。
a)EEG(脳波図)
b)EMG(筋電図)
c)ECG(心電図)
d)EOG(眼電図)
e)SCP(遅い皮質電位)
f)GSR(皮膚電気反応−皮膚コンダクタンス)
g)呼吸
h)パルス酸素濃度
i)高分解能温度
j)BVP(フォトプレチスモグラフィー)
k)迷走神経緊張
1)HRV(心拍変動性)
b.脳波図(EEG)
c.皮膚コンダクタンス
d.能力からの応答時間
【発明の効果】
【0013】
提供される運動の方法は、運動変数の同期を可能にする第1のマスタ制御システムを通して制御される。さらに、この運動方法は、オペレータのため、予めプログラムされたまたはバイオフィードバック反応が導かれた方法のアプリケーションとプロトコルに適用されることが可能である。この装置は、脳卒中、外傷脳損傷、自閉症、アルツハイマーとパーキンソン、脊髄障害、切断、同調、ストレス減少、ピークパフォーマンストレーニングのような発達上の遅れ、学習障害、脳損傷、変性神経障害、神経病学的怪我がある子供たちと大人に役立ち、スポーツパフォーマンスを強化する。
【発明を実施するための最良の形態】
【0014】
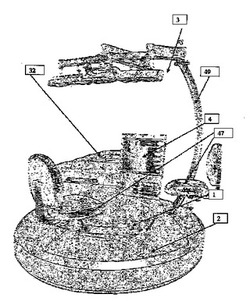
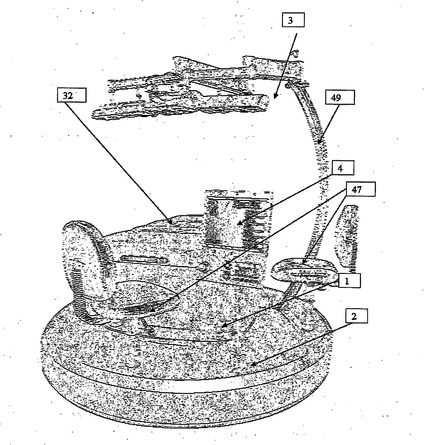
図1および図2は運動装置の側面図を示す。人間はサポートプラットホーム(図15)32に上に置かれ、座ったか横たわっている位置に置かれる。テーブル32は完全な仰向けの(平らな)位置に直立した着席のために置かれる。視覚光学ライト機器(図1b)3は、上部回転取付フレーム(図5)18に取り付けられた取付ポール49に取り付けられる関節アーム組み立て部品48に取り付けられる。視覚光学ライト機器3は、人間の頭と視線の上に位置する。視覚光学ライト機器3は、ライト機器の異なった球で異なった色の刺激を提供する。これはオペレータによって決定される。
【0015】
サポートプラットホーム32は、水平取付プレート(図3a)10に備え付けられる。水平取付プレート10は、線形すべり(図3a)8と水平線形アクチュエータ/ネジ機能(図3a)11の手段によって内部フレーム組み立て部品(図3a)(9)に取り付けられる。この取付はテーブルが水平軸に線形な方法で動くことを可能にする。さらにまた、サポートプラットホーム32は、水平線形アクチュエータ/ネジ機能に関してサポートプラットホーム32の位置を基にしてテーブルの中で左から右への線形の動作、または頭から足への線形の動作で動くことが可能な水平取付プレート10上の位置で回転することが可能である。図3bで示されているように、上部滑車システム12は水平線形アクチュエータ/ネジ機能11に取り付けられ、上部動作プラットホームの中で線形運動の動作を提供する。図3cの中で水平正面図は上部滑車システム12と線形すべりレール8の詳細の表示を示している。
【0016】
サポートプラットホーム32は、動作の垂直面成分も提供する。これは、図3dの中で見られ、垂直軸モータ15は垂直軸モータマウント16に取り付けられて、垂直軸線形アクチュエータ/ネジ機能6を上下に動かす垂直軸下部滑車システム5を駆動する。垂直軸線形アクチュエータ6は、垂直軸線形すべりレール(図3e)17を有する内部フレーム9に取り付けられる。オペレータが動作コントローラ図9から異なる動作プロフィールを選択した時、水平線形アクチュエータ/ネジ機能11と垂直線形アクチュエータ/ネジ機能6は制御され、水平軸の周りの円、U字型、完全な線形、完全な垂直と正弦波に限定されない異なった動作プロファイルを作成する。
【0017】
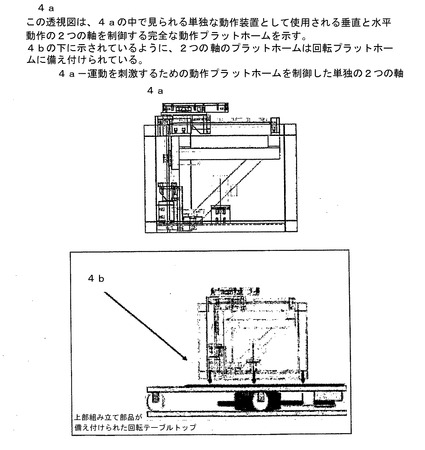
図4aに示されているように、2つの軸のプラットホームはある実施形態で単独な動作プラットホームとして使用されることができる。図4bの中で2つの軸のプラットホームは回転プラットホーム(図5)2の1番上に備え付けられている。図5は、中心ハブ組み立て部品20に取り付けられた上部フレーム18と下部フレーム19の2つの取付フレームを有する回転プラットホーム2を示している。上部フレーム18の取付は、その上に置かれる重りの支持を助ける6つのホイールである。回転ベース2は、装置の全てのシステム制御を実行するための電力を供給する中心ハブ20の中に備え付けられている整流リング21を有している。上部回転ベースプラットホーム(18)の取付は、上部回転ベース18を中心軸の周りに回転することを可能にする鎖組み立て部品(23)に取り付けられたモータと回転ギア駆動組み立て部品(22)である。上部フレーム組み立て部品(18)は回転し、下部プラットホーム(19)は固定のままである。それゆえ、モータとギア駆動組み立て部品(22)は上部プラットホーム(18)で回転する。図4bで見たように、垂直および水平軸プラットホーム1が回転プラットホーム2に取り付けられたとき、サポートプラットホーム32上で参加者に適用される多くの異なった動作の組み合わせがある。
【0018】
図6で見られる制御システムに戻る。手動モードの光制御は、dmxコード27に変換され、視覚光学ライト機器3に送られるMIDIソフトウェアコード26を制御する第1の制御オペレーティングシステム24を使用する。第1の制御オペレーティングシステム24は、光プログラムに対するMIDIソフトウェアコードの選択を可能とするGUIタッチスクリーンインターフェース(図18)39を使用する。第2の制御オペレーティングシステム25は、MIDIソフトウェアコード26に含まれている光プログラムを選択し実行する別の方法のために提供される。
【0019】
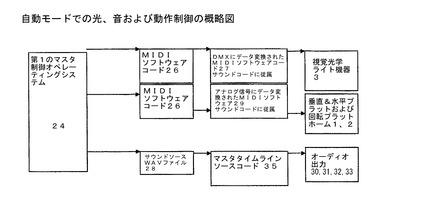
図7は、自動モードが選択されたとき、光、音および動作が制御されることを示す。第1のマスタ制御システム24は、dmx27に変換されたMIDIソフトウェアコード26を送り、その後視覚光学ライト機器3、垂直および水平、および回転プラットホーム1、2に送る。さらに第1のマスタ制御システム24は、視覚光学ライト機器3、水平および垂直動作プラットホーム1、および回転プラットホーム2に対してマスタタイムラインソースコード35として動作するサウンドソースwavファイル28または同様な同等物を送り、同様にヘッドフォン30、スピーカ31、サポートプラットホーム32と変換器33に供給する。
【0020】
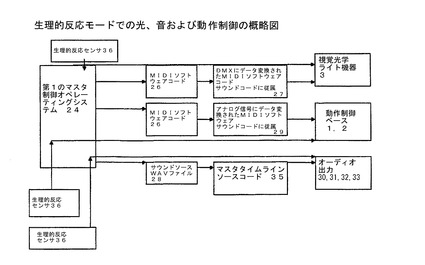
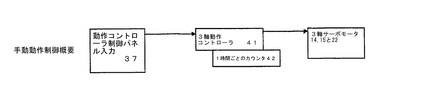
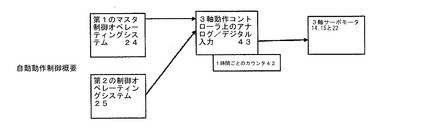
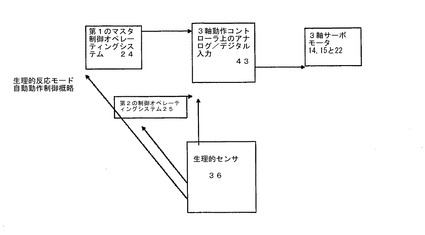
図8は、生理的反応センサ36を統合するマスタ制御システム24を示し、直接視覚光学ライト機器3に、直接動作制御ベース1または2、直接オーディオ出力装置、ヘッドフォン30、スピーカ31、サポートプラットホーム32と変換器33にそれを出力し導く。図9は3軸の動作コントローラ41を制御して、同様に1時間ごとのカウンタ42を制御する手動動作制御入力37を示し、さらに、信号は垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22に導かれる。図10は、第1のマスタ制御プラットホーム24または第2の制御オペレーティングシステム25から信号を受け取ることによって、自動動作制御がどのように働くかを示し、信号は3軸の動作コントローラ43のアナログ/デジタル入力へ送られ、それから、サーボモータ(垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22)を制御する。図11は、第2のオペレーティングシステム25と第1のマスタ制御オペレーティングシステム24に信号を送る生理的センサ36によって、動作制御がどのように影響を受けるかを示し、第1のマスタ制御オペレーティングシステム24は、その信号を3軸の動作コントローラのアナログ/デジタル入力へ送り、垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22を制御する。
【0021】
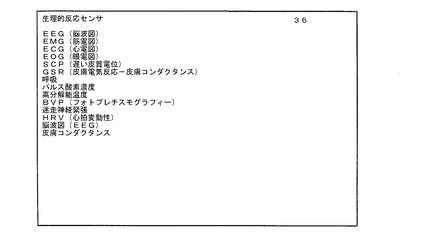
図12は、オペレータが選択した好みに基づいて参加者の四肢が置かれる圧迫ポンプ/血管空気圧装置44を表す。図13は、TENS/神経筋肉刺激ユニット45を表し、これはクライアントの四肢が置かれる電極に電流を供給する。図14は、オペレータプログラムの変更またはシステム制御の自動制御のための目的変数として使用される生理反応センサ36を表す。
【0022】
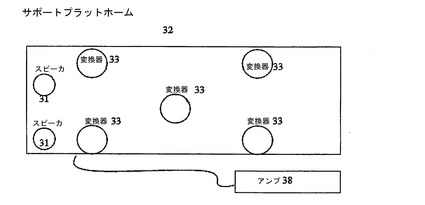
図15は、テーブルの頭に置かれた5台の変換器33と2つのスピーカ31を有しているサポートプラットホーム32の上面透視図である。変換器33はアンプ38から電力供給され、個々に制御され、どんな組合せででもオン/オフされるように調整されている。中心の変換器は、常にオンである。スピーカ31は、第1のマスタ制御システム24またはアンプ38または任意の第三者の音声出力装置からの入力を受け取る。
【0023】
図16は、参加者が動作プラットホーム内にいて、認識運動と同様に異なる種類のバイオフィードバック運動を実行している間、参加者に付けられるビデオヘッドセットを表す。
【0024】
図17は、第1のマスタ制御システム24、第2のマスタ制御システム25または任意の第三者の音声出力装置から入力を受け取るヘッドホンを表す。
【0025】
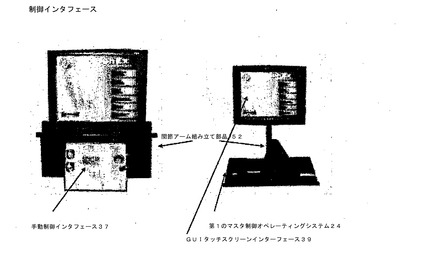
図18は、手動制御インターフェース37とGUIタッチスクリーンインターフェース39と第1のマスタ制御オペレーティングシステム24を備え付ける関節アーム52を表す。手動制御インターフェース37は、電源オン、電源オフと非常停止ボタンを含む。第2の制御オペレーティングシステム25が選択されない限り、すべての参加者のプログラミングは、第1のマスタ制御インターフェース24と手動制御インターフェース37を通して行われる。
【0026】
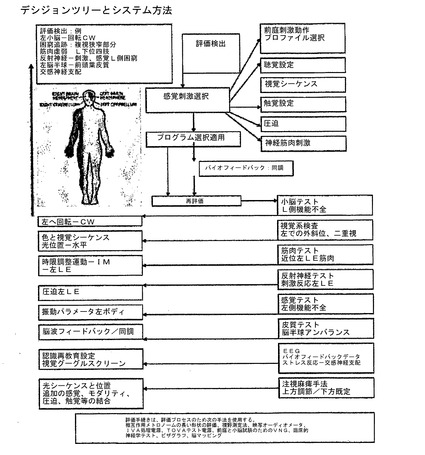
図19は、デシジョンツリーと概略の形のシステム方法46と、制御と選択基準が多感覚トレーニングシステムの変数のためどのように作成されるかの例を表す。
【図面の簡単な説明】
【0027】
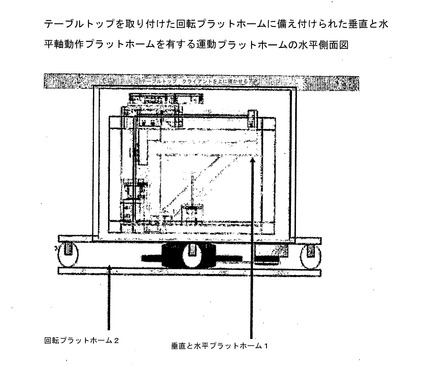
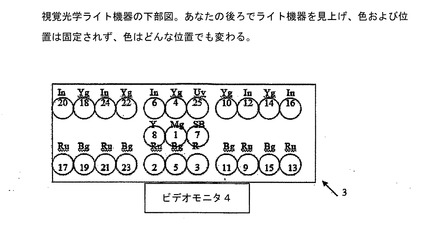
【図1】本発明のすべての特徴を集めた運動動作プラットホームの側面図を示す。図1aは、テーブルトップを取り付けた回転プラットホームに備え付けられた垂直と水平軸動作プラットホームを有する運動プラットホームの水平側面図を示す。図1bは、LEDの数が1−25である視覚光学ライト機器と参加者の視線に置かれることができるビデオモニタの下部図を示す。
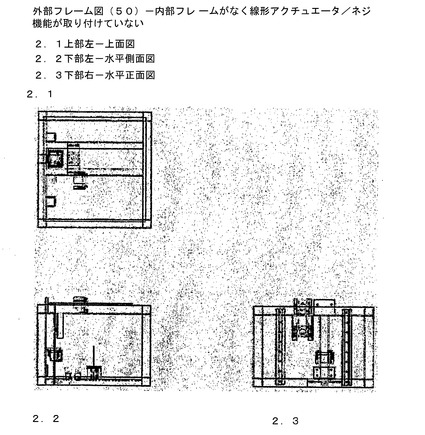
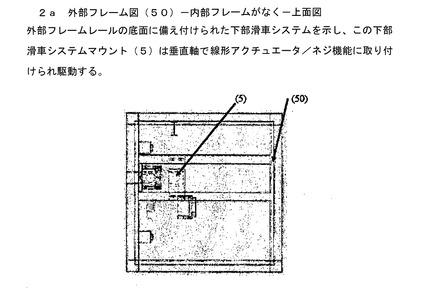
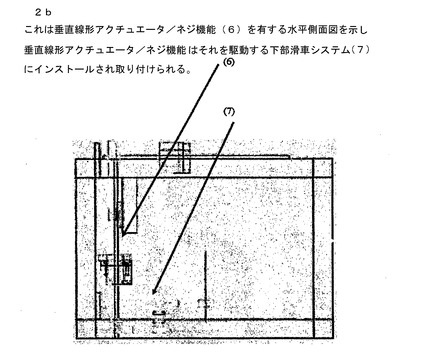
【図2】2.1上部左−上面図、2.2下部左−水平側面図、2.3下部右−水平正面図が付属している、内部フレームがなく線形アクチュエータ/ネジ機能がない外部サポートフレームの立面図を透視的に示す。この透視図で図2aは、内部フレームがない外部フレームを示し、上面図はフレームレールの底面に備え付けられた下部滑車システムを示し、この下部滑車システム(5)は垂直軸で線形アクチュエータ/ネジ機能に取り付けられ駆動する。この透視図で図2bは、垂直線形アクチュエータ/ネジ機能を駆動する下部滑車システム(7)にインストールされ取り付けられた垂直線形アクチュエータ/ネジ機能(6)を有する横側面図に示す。
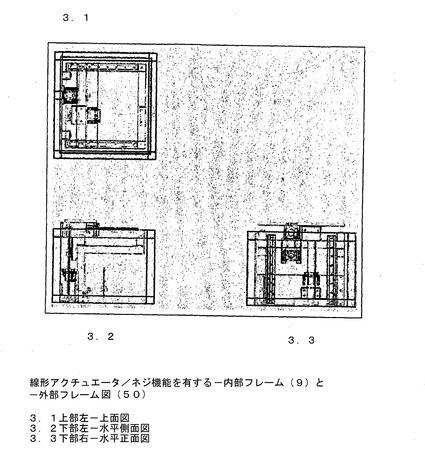
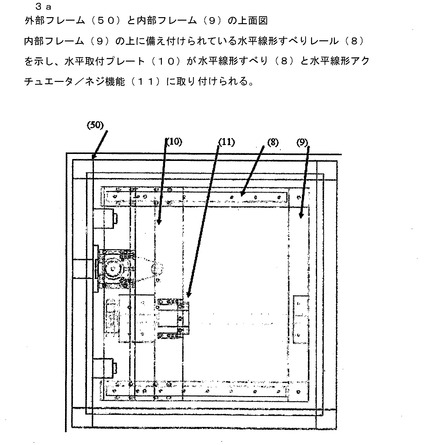
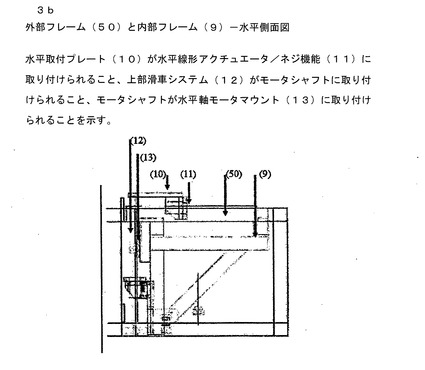
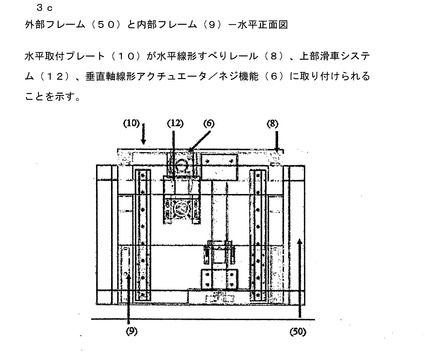
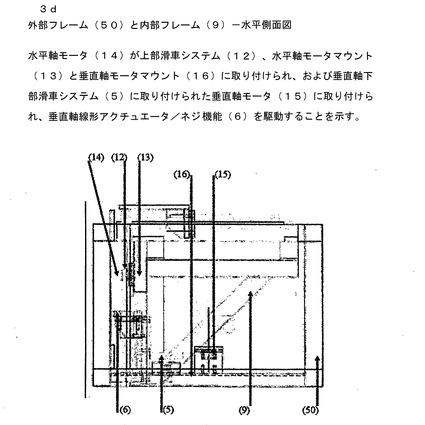
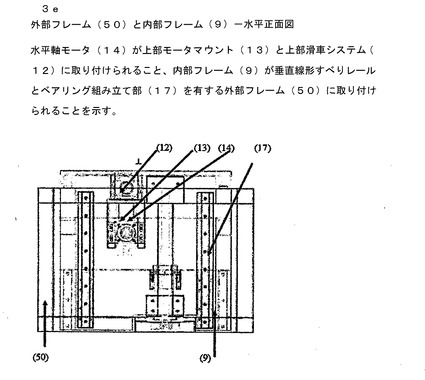
【図3】3.1上部左−上面図、3.2下部左−水平側面図、3.3下部右−水平正面図が付属している、線形アクチュエータ/ネジ機能を有する外部フレーム図(50)と内部フレーム(9)を透視的に示す。図3aは、外部フレーム(50)と内部フレーム(9)の上面図であり、水平線形すべりレール(8)が内部フレーム(9)の上に備え付けられていることと、水平取付プレート(10)が水平線形すべり(8)と水平線形アクチュエータ/ネジ機能(11)に取り付けられることを示している。この透視図で図3bは、外部フレーム(50)と内部フレーム(9)の水平側面図であり、水平取付プレート(10)が水平線形アクチュエータ/ネジ機能(11)に取り付けられること、上部滑車システム(12)がモータシャフトに取り付けられること、モータシャフトが水平軸モータマウント(13)に取り付けられることを示している。この透視図で図3cは、外部フレーム(50)と内部フレーム(9)の水平正面図であり、水平取付プレート(10)が水平線形すべりレール(8)、上部滑車システム(12)、垂直軸線形アクチュエータ/ネジ機能(6)に取り付けられることを示している。この透視図で図3dは、外部フレーム(50)と内部フレーム(9)の水平側面図であり、水平軸モータ(14)が上部滑車システム(12)、水平軸モータマウント(13)と垂直軸モータマウント(16)に取り付けられ、および垂直軸下部滑車システム(5)に取り付けられた垂直軸モータ(15)に取り付けられ、垂直軸線形アクチュエータとネジ機能(6)を駆動することを示している。この透視図で図3eは、外部フレーム(50)と内部フレーム(9)の水平正面図であり、水平軸モータ(14)が上部モータマウント(13)と上部滑車システム(12)に取り付けられること、内部フレーム(9)が垂直線形すべりレールとベアリング組み立て部(17)を有する外部フレーム(50)に取り付けられることを示している。
【図4】図4aは、4aの中で見られる単独な動作装置として使用される垂直と水平動作の2つの軸を制御する完全な動作プラットホームを示す透視図である。図4bは、4bの下に示されているように、回転プラットホームに備え付けられた、4a中で見られるような上部2軸組み立て部を示す透視図である。
【図5】回転テーブルが、中心軸のまわりの回転を可能とする中心ハブ(20)の上および下に2つの取付フレーム(上部フレーム(18)と下部フレーム(19))を有することを示す水平図である。上部フレーム(18)への取付は、その上に置かれる重りの支持を助ける6つのホイールである。さらに、回転ベースは電流をそれを通して流す整流リング(21)を有している。 上部回転ベースプラットホームの取付は、回転ベースを中心軸の周りに回転することを可能にする鎖組み立て部品(23)に取り付けられたモータと回転ギア駆動組み立て部品(22)である。上部フレーム組み立て部品(18)は回転し、下部プラットホーム(19)は固定のままである。それゆえ、モータとギア駆動組み立て部品(22)は上部プラットホーム(18)で回転する。
【図6】手動モードでの光制御の概略を示す。
【図7】自動モードでの光、音および動作制御の概略を示す。
【図8】生理的反応モードでの光、音および動作制御の概略を示す。
【図9】手動動作制御入力を示す。
【図10】自動動作制御の概略を示す。
【図11】生理的反応モードを使用した自動動作制御の概略を示す。
【図12】血管空気圧ポンプ/圧迫装置の概略を示す。
【図13】経皮電気的神経刺激(TENS)/神経筋肉刺激、これはクライアントの四肢に置かれる電極に電流を提供する。
【図14】生理反応入力として取り入れられる生理反応センサのリストを示す。
【図15】サポートプラットホームの頂部図を示し、クライアントはテーブルの上で横たわって、変換器は、両側の肩の範囲、下の背骨と各足に置かれている。テーブルの中でスピーカは頭が置かれる位置を示している。
【図16】ユーザの目の上に置かれるビデオヘッドセットを示す。
【図17】運動プログラムの間に使用される感覚刺激変数の実現を記載するデシジョンツリーを示す。
【符号の説明】
【0028】
1 垂直および水平プラットホーム
2 回転プラットホーム
3 視覚光学ライト機器
4 ビデオモニタ
5 下部滑車システムマウント
6 垂直線形アクチュエータ/ネジ機能
7 下部滑車システム
8 水平線形すべりレール
9 内部フレーム
10 水平取付プレート
11 水平ネジ機能
12 上部滑車システム
13 水平軸モータマウント
14 水平軸モータ
15 垂直軸モータ
16 垂直軸モータマウント
17 垂直線形すべり
18 取付フレーム上部
19 取付フレーム下部
20 センタハブ
21 整流リング
22 回転サーボモータとギア駆動組み立て部品
23 鎖組み立て部品
24 第1のマスタ制御オペレーティングシステム
25 第2の制御オペレーティングシステム
26 MIDIソフトウェアコード
27 DMX変換ソフトウェア
28 サウンドwavファイル
29 アナログ信号ソフトウェア変換
30 ヘッドフォン
31 スピーカ
32 サポートプラットホーム
33 変換器
35 マスタタイムラインコード
36 生理的反応センサ
37 手動制御インタフェース
38 触覚アンプ
39 GUIタッチスクリーンインターフェース
40 ビデオヘッドセット
41 動作コントローラ図9
42 1時間ごとのカウンタ
43 動作コントローラ図10上のアナログ入力出力カード
44 圧迫ポンプ/血管空気圧ポンプ
45 TENS/神経筋肉刺激
46 デシジョンツリーとシステム方法概観
47 オペレータ座席装置
48 視覚光学ライト機器のための関節アーム組み立て部品
49 関節アーム組み立て部品のための取付ポール
50 外部フレーム組み立て部品
51 回転動作プラットホーム
52 関節アーム組み立て部品
【技術分野】
【0001】
本発明は、運動装置、運動の方法及びシステムの分野に関し、これらは利用者が感覚系と運動系の両方を同時に同期して、運動することを可能とする。本発明は、さらに感覚刺激変数の用途の中に変化を機器またはオペレータが作ることを導き、バイオフィードバック、生理学的モニタリング、および再評価手順を通して導かれる。これらの感覚刺激変数は、前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激を含む。
【背景技術】
【0002】
システムは、感覚刺激の目的のため作られたが、視覚、嗅覚及び聴覚系の刺激変数のために設計された(特許文献1参照)。これらのシステムは、気分効用、ストレス解放、ある場合では治療上の用途と同様に娯楽のためである。これらのシステムの応用の方法は、主に異なった刺激環境を生成するために設計されている。これらのシステムは、非常に特別な多感覚運動手続きで結合されるため、前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激の結合した感覚及び運動入力を可能にしない。従って、ストレスを減少させる、休養を向上させる、多感覚の処理、調整および認識能力を向上させる物理的および感覚的治療の治療的介入と同様に娯楽目的のため、前庭、聴覚、視覚、触覚、圧迫、神経筋肉の刺激及び運動の刺激を提供可能な多感覚応用の刺激装置とこれらの刺激変数の応用の方法とに需要がある。
【0003】
【特許文献1】米国特許 6、702、767号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は多感覚刺激システム及びそのようなシステムの使用方法であり、システムは、先行技術の感覚刺激装置の欠点を解決するように設計され、さらに、運動変数として前庭、聴覚、視覚、触覚、圧迫、運動及び神経筋肉の刺激、バイオフィードバック及び視聴覚の同調/神経刺激を使用している柔軟な、個人にあわせた多感覚刺激プログラムが適応されたものであり、多感覚刺激プログラム開発のための上記変数の応用の方法でもある。
【課題を解決するための手段】
【0005】
定義
この実施例の目的のため:
「システム制御」は、視覚、聴覚、動作、圧迫、振動、電気刺激、グラフィックディスプレイ出力及び生理学的反応センサを含んでいるシステムの制御および/または記録を含んでいるカテゴリとして定義される。
「運動」刺激は、動作運動と定義される。
「二重動作」プラットホームは、お互いに取り付けられた上部動作プラットホームと下部回転動作プラットホームと言及される。
【0006】
システムは、水平軸まわりでの回転平面動作、純粋な線形動作またはU字型前庭刺激パタンを提供する第2の上部動作プラットホームと同様に、垂直軸まわりでの回転平面動作の前庭刺激を提供する二重動作プラットホームを含んでおり、カスタムプロファイルは、好ましい動作の組み合わせの中ですべての3つの軸をプログラミングすることによって結合されることができる。ある実施形態の中で、刺激変数(触覚、圧迫、運動及び神経の刺激)のいくつかと同様に垂直軸まわりでの回転動作プラットホームは排除される。システムは一意に設計され、マスタ制御システムが回転プラットホームに固定されているのと同様に、視覚光学ライト機器は下部回転動作プラットホームに取り付けられる関節アームと取付ポールに定着され、1つのように動き、両者は手動的にシステムの制御と安全機能にアクセスを可能としている間、オペレータと参加者を直列に一緒に動かすことを可能とする整流リングを通して動力を供給する。オペレータは制御パネルにアクセスする2つの座席のサイトのうちの1つに座っている。制御パネルは、回転プラットホームに取り付けられたポールと関節アームに定着され、前記関節アームと同様に取り付けられたコンピュータモニタ、コンピュータシステムとキーボードを持っている。オペレータは関節アームを旋回することが可能で、それによって、制御パネル、コンピュータシステム、キーボードとモニタを視線の列に置くことができる。
【0007】
視覚光学ライト機器は、関節アームに付けられた回転軸のまわりで光を回転させるか、位置のために関節アームを動かすことによって、参加者の視線の列に置かれる。視覚光学ライト機器は、第1のマスタ制御システムまたは第2の制御システムを通して制御されるLED球を有する。光は参加者の頭上に置かれて、任意の筐体の中に囲まれない視覚経験における要因である環境変数を可能とする。視覚光学ライト機器は、色つきレンズとそれらの背後のガラス拡散体を有する円形である。視覚とき、マスクは異なる形状をつくるために視覚光学ライト機器の上にオプションで適用される。光に適用されるプログラムは、第1のマスタ制御システムまたは第2の制御システムで予めプログラムされる。様々な視覚刺激プログラムは、視覚追跡シーケンス、カラースペクトルの一端で始まり他端で終わるカラーシーケンス、または視覚光学ライト機器のある位置での参加者の色で変化する。視覚光学ライト機器の設置は、参加者に影響と衝撃を及ぼして、参加者の頭上の水平面のどんな位置にでも置かれることができ、それは下に傾けられることもでき、座った位置で参加者を視線の位置と平行のままにできる。視覚光学ライト機器に加えて、視線に置かれることができるビデオモニタまたは認識と実行運動と同様にバイオフィードバック運動のため彼らの目の上に置かれるビデオヘッドセットがある。
【0008】
サポートプラットホームは上部運動プラットホームに取り付けられて、背骨の下部、上部の左肩、上部の右肩、下部の左大腿と下部の右大腿に置かれた最低5台の変換器を含む。これは、オペレータの検出と推薦に基づいて適用される各変換器の個々の選択を可能と視、ある実施形態ではこの特徴は除外される。変換器は外部アンプから電力供給され、第1のマスタ制御システム、第2の制御システムまたは任意の外部音声再生装置から、サウンドジャックに対する入力を受ける。機能的に、変換器はサウンドファイルを通して動かされ、あるサウンドファイルは、音、光およびサポート経験が統合され、望ましい反応が特定されるような光プログラムと関連している特別なサウンドファイルを有する。
【0009】
マスタ制御オペレーティングシステムは、参加者が光と音のプログラムの選択と実行を可能とするGUIグラフィカルユーザインタフェースを含む。動作制御が自動モードとして選択されたとき、サウンドファイルはWAVファイルであり、動作制御と同様に光プログラムのためマスタタイムコードソースとして働く。一旦サウンドファイルが選択されると、参加者の頭の後に取り付けられたヘッドフォン、振動変換器またはスピーカに出力される。自動モードで、動作制御ファイルがMIDIファイルの時、一度選択されたファイルはアナログ信号に変換され、動作制御命令のため動作コントローラに送られ、動作制御ファイルはサウンドファイルに対する従属と見なされる。光プログラムはMIDIファイルで、ファイルライブラリに保存され、一旦GUIによって選択されたら、それらはdmxファイルにソフトウェアコードによって変換され、オペレーターからアプリケーションの方法に基づいて選択される。それから、LEDを動かすために視覚光学ライト機器に送られ、それらは、マスタサウンドファイルに対する従属ファイルと見なされる。
【0010】
感覚刺激システムは、下部と下部の二重動作制御プラットホームの方向と速度を独立に制御することを可能とする備え付けられているHMI−人間機械インターフェースに関する動作の手動制御を有する。追加で、動作コントローラは、勘定が釣り合っていないときに発生し、動作を不可能にする1時間ごとのカウントログを許す。さらに手動制御は、圧迫、神経筋肉の刺激、視聴覚同調/神経刺激、EEGおよびバイオフィードバックセンサのアプリケーションのために存在し、これらの制御は、この装置から感覚刺激のアプリケーションの方法の一部として評価と検出に基づいて選択される。
【0011】
現在の発明はしたがって、方法と装置を開示し、この装置は臨床的検出と方法の応用に基づいたバイオフィードバック入力、評価検出およびデシジョンツリーを通してさらに伝えられる運動として、感覚刺激と運動刺激を提供する。
【0012】
運動の方法は、異なった種類の感覚と運動の刺激を可能とする同期プロセスおよび前記刺激と同時に行われる反応と同時に、参加者の感覚と運動系を訓練することをユーザに可能とし、その結果ユーザの感覚と運動系が訓練される。同期プロセスは、空間に装置の位置を結合するマスタ制御システムによって実行され、同期して感覚と運動のための装置変数のいくつかの制御を可能とする。同期システムは、いくつかの異なるモードで運動の同期を実行する。
1)オペレータ−ユーザは命令セットを定義し、
2)予めプログラムされた運動プロトコルと、
3)バイオフィードバック、これは、以下の1つまたは複数の手動または自動反応を含むことができる。
a)EEG(脳波図)
b)EMG(筋電図)
c)ECG(心電図)
d)EOG(眼電図)
e)SCP(遅い皮質電位)
f)GSR(皮膚電気反応−皮膚コンダクタンス)
g)呼吸
h)パルス酸素濃度
i)高分解能温度
j)BVP(フォトプレチスモグラフィー)
k)迷走神経緊張
1)HRV(心拍変動性)
b.脳波図(EEG)
c.皮膚コンダクタンス
d.能力からの応答時間
【発明の効果】
【0013】
提供される運動の方法は、運動変数の同期を可能にする第1のマスタ制御システムを通して制御される。さらに、この運動方法は、オペレータのため、予めプログラムされたまたはバイオフィードバック反応が導かれた方法のアプリケーションとプロトコルに適用されることが可能である。この装置は、脳卒中、外傷脳損傷、自閉症、アルツハイマーとパーキンソン、脊髄障害、切断、同調、ストレス減少、ピークパフォーマンストレーニングのような発達上の遅れ、学習障害、脳損傷、変性神経障害、神経病学的怪我がある子供たちと大人に役立ち、スポーツパフォーマンスを強化する。
【発明を実施するための最良の形態】
【0014】
図1および図2は運動装置の側面図を示す。人間はサポートプラットホーム(図15)32に上に置かれ、座ったか横たわっている位置に置かれる。テーブル32は完全な仰向けの(平らな)位置に直立した着席のために置かれる。視覚光学ライト機器(図1b)3は、上部回転取付フレーム(図5)18に取り付けられた取付ポール49に取り付けられる関節アーム組み立て部品48に取り付けられる。視覚光学ライト機器3は、人間の頭と視線の上に位置する。視覚光学ライト機器3は、ライト機器の異なった球で異なった色の刺激を提供する。これはオペレータによって決定される。
【0015】
サポートプラットホーム32は、水平取付プレート(図3a)10に備え付けられる。水平取付プレート10は、線形すべり(図3a)8と水平線形アクチュエータ/ネジ機能(図3a)11の手段によって内部フレーム組み立て部品(図3a)(9)に取り付けられる。この取付はテーブルが水平軸に線形な方法で動くことを可能にする。さらにまた、サポートプラットホーム32は、水平線形アクチュエータ/ネジ機能に関してサポートプラットホーム32の位置を基にしてテーブルの中で左から右への線形の動作、または頭から足への線形の動作で動くことが可能な水平取付プレート10上の位置で回転することが可能である。図3bで示されているように、上部滑車システム12は水平線形アクチュエータ/ネジ機能11に取り付けられ、上部動作プラットホームの中で線形運動の動作を提供する。図3cの中で水平正面図は上部滑車システム12と線形すべりレール8の詳細の表示を示している。
【0016】
サポートプラットホーム32は、動作の垂直面成分も提供する。これは、図3dの中で見られ、垂直軸モータ15は垂直軸モータマウント16に取り付けられて、垂直軸線形アクチュエータ/ネジ機能6を上下に動かす垂直軸下部滑車システム5を駆動する。垂直軸線形アクチュエータ6は、垂直軸線形すべりレール(図3e)17を有する内部フレーム9に取り付けられる。オペレータが動作コントローラ図9から異なる動作プロフィールを選択した時、水平線形アクチュエータ/ネジ機能11と垂直線形アクチュエータ/ネジ機能6は制御され、水平軸の周りの円、U字型、完全な線形、完全な垂直と正弦波に限定されない異なった動作プロファイルを作成する。
【0017】
図4aに示されているように、2つの軸のプラットホームはある実施形態で単独な動作プラットホームとして使用されることができる。図4bの中で2つの軸のプラットホームは回転プラットホーム(図5)2の1番上に備え付けられている。図5は、中心ハブ組み立て部品20に取り付けられた上部フレーム18と下部フレーム19の2つの取付フレームを有する回転プラットホーム2を示している。上部フレーム18の取付は、その上に置かれる重りの支持を助ける6つのホイールである。回転ベース2は、装置の全てのシステム制御を実行するための電力を供給する中心ハブ20の中に備え付けられている整流リング21を有している。上部回転ベースプラットホーム(18)の取付は、上部回転ベース18を中心軸の周りに回転することを可能にする鎖組み立て部品(23)に取り付けられたモータと回転ギア駆動組み立て部品(22)である。上部フレーム組み立て部品(18)は回転し、下部プラットホーム(19)は固定のままである。それゆえ、モータとギア駆動組み立て部品(22)は上部プラットホーム(18)で回転する。図4bで見たように、垂直および水平軸プラットホーム1が回転プラットホーム2に取り付けられたとき、サポートプラットホーム32上で参加者に適用される多くの異なった動作の組み合わせがある。
【0018】
図6で見られる制御システムに戻る。手動モードの光制御は、dmxコード27に変換され、視覚光学ライト機器3に送られるMIDIソフトウェアコード26を制御する第1の制御オペレーティングシステム24を使用する。第1の制御オペレーティングシステム24は、光プログラムに対するMIDIソフトウェアコードの選択を可能とするGUIタッチスクリーンインターフェース(図18)39を使用する。第2の制御オペレーティングシステム25は、MIDIソフトウェアコード26に含まれている光プログラムを選択し実行する別の方法のために提供される。
【0019】
図7は、自動モードが選択されたとき、光、音および動作が制御されることを示す。第1のマスタ制御システム24は、dmx27に変換されたMIDIソフトウェアコード26を送り、その後視覚光学ライト機器3、垂直および水平、および回転プラットホーム1、2に送る。さらに第1のマスタ制御システム24は、視覚光学ライト機器3、水平および垂直動作プラットホーム1、および回転プラットホーム2に対してマスタタイムラインソースコード35として動作するサウンドソースwavファイル28または同様な同等物を送り、同様にヘッドフォン30、スピーカ31、サポートプラットホーム32と変換器33に供給する。
【0020】
図8は、生理的反応センサ36を統合するマスタ制御システム24を示し、直接視覚光学ライト機器3に、直接動作制御ベース1または2、直接オーディオ出力装置、ヘッドフォン30、スピーカ31、サポートプラットホーム32と変換器33にそれを出力し導く。図9は3軸の動作コントローラ41を制御して、同様に1時間ごとのカウンタ42を制御する手動動作制御入力37を示し、さらに、信号は垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22に導かれる。図10は、第1のマスタ制御プラットホーム24または第2の制御オペレーティングシステム25から信号を受け取ることによって、自動動作制御がどのように働くかを示し、信号は3軸の動作コントローラ43のアナログ/デジタル入力へ送られ、それから、サーボモータ(垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22)を制御する。図11は、第2のオペレーティングシステム25と第1のマスタ制御オペレーティングシステム24に信号を送る生理的センサ36によって、動作制御がどのように影響を受けるかを示し、第1のマスタ制御オペレーティングシステム24は、その信号を3軸の動作コントローラのアナログ/デジタル入力へ送り、垂直軸サーボモータ15と水平軸サーボモータ14と動作プラットホームの回転サーボモータ22を制御する。
【0021】
図12は、オペレータが選択した好みに基づいて参加者の四肢が置かれる圧迫ポンプ/血管空気圧装置44を表す。図13は、TENS/神経筋肉刺激ユニット45を表し、これはクライアントの四肢が置かれる電極に電流を供給する。図14は、オペレータプログラムの変更またはシステム制御の自動制御のための目的変数として使用される生理反応センサ36を表す。
【0022】
図15は、テーブルの頭に置かれた5台の変換器33と2つのスピーカ31を有しているサポートプラットホーム32の上面透視図である。変換器33はアンプ38から電力供給され、個々に制御され、どんな組合せででもオン/オフされるように調整されている。中心の変換器は、常にオンである。スピーカ31は、第1のマスタ制御システム24またはアンプ38または任意の第三者の音声出力装置からの入力を受け取る。
【0023】
図16は、参加者が動作プラットホーム内にいて、認識運動と同様に異なる種類のバイオフィードバック運動を実行している間、参加者に付けられるビデオヘッドセットを表す。
【0024】
図17は、第1のマスタ制御システム24、第2のマスタ制御システム25または任意の第三者の音声出力装置から入力を受け取るヘッドホンを表す。
【0025】
図18は、手動制御インターフェース37とGUIタッチスクリーンインターフェース39と第1のマスタ制御オペレーティングシステム24を備え付ける関節アーム52を表す。手動制御インターフェース37は、電源オン、電源オフと非常停止ボタンを含む。第2の制御オペレーティングシステム25が選択されない限り、すべての参加者のプログラミングは、第1のマスタ制御インターフェース24と手動制御インターフェース37を通して行われる。
【0026】
図19は、デシジョンツリーと概略の形のシステム方法46と、制御と選択基準が多感覚トレーニングシステムの変数のためどのように作成されるかの例を表す。
【図面の簡単な説明】
【0027】
【図1】本発明のすべての特徴を集めた運動動作プラットホームの側面図を示す。図1aは、テーブルトップを取り付けた回転プラットホームに備え付けられた垂直と水平軸動作プラットホームを有する運動プラットホームの水平側面図を示す。図1bは、LEDの数が1−25である視覚光学ライト機器と参加者の視線に置かれることができるビデオモニタの下部図を示す。
【図2】2.1上部左−上面図、2.2下部左−水平側面図、2.3下部右−水平正面図が付属している、内部フレームがなく線形アクチュエータ/ネジ機能がない外部サポートフレームの立面図を透視的に示す。この透視図で図2aは、内部フレームがない外部フレームを示し、上面図はフレームレールの底面に備え付けられた下部滑車システムを示し、この下部滑車システム(5)は垂直軸で線形アクチュエータ/ネジ機能に取り付けられ駆動する。この透視図で図2bは、垂直線形アクチュエータ/ネジ機能を駆動する下部滑車システム(7)にインストールされ取り付けられた垂直線形アクチュエータ/ネジ機能(6)を有する横側面図に示す。
【図3】3.1上部左−上面図、3.2下部左−水平側面図、3.3下部右−水平正面図が付属している、線形アクチュエータ/ネジ機能を有する外部フレーム図(50)と内部フレーム(9)を透視的に示す。図3aは、外部フレーム(50)と内部フレーム(9)の上面図であり、水平線形すべりレール(8)が内部フレーム(9)の上に備え付けられていることと、水平取付プレート(10)が水平線形すべり(8)と水平線形アクチュエータ/ネジ機能(11)に取り付けられることを示している。この透視図で図3bは、外部フレーム(50)と内部フレーム(9)の水平側面図であり、水平取付プレート(10)が水平線形アクチュエータ/ネジ機能(11)に取り付けられること、上部滑車システム(12)がモータシャフトに取り付けられること、モータシャフトが水平軸モータマウント(13)に取り付けられることを示している。この透視図で図3cは、外部フレーム(50)と内部フレーム(9)の水平正面図であり、水平取付プレート(10)が水平線形すべりレール(8)、上部滑車システム(12)、垂直軸線形アクチュエータ/ネジ機能(6)に取り付けられることを示している。この透視図で図3dは、外部フレーム(50)と内部フレーム(9)の水平側面図であり、水平軸モータ(14)が上部滑車システム(12)、水平軸モータマウント(13)と垂直軸モータマウント(16)に取り付けられ、および垂直軸下部滑車システム(5)に取り付けられた垂直軸モータ(15)に取り付けられ、垂直軸線形アクチュエータとネジ機能(6)を駆動することを示している。この透視図で図3eは、外部フレーム(50)と内部フレーム(9)の水平正面図であり、水平軸モータ(14)が上部モータマウント(13)と上部滑車システム(12)に取り付けられること、内部フレーム(9)が垂直線形すべりレールとベアリング組み立て部(17)を有する外部フレーム(50)に取り付けられることを示している。
【図4】図4aは、4aの中で見られる単独な動作装置として使用される垂直と水平動作の2つの軸を制御する完全な動作プラットホームを示す透視図である。図4bは、4bの下に示されているように、回転プラットホームに備え付けられた、4a中で見られるような上部2軸組み立て部を示す透視図である。
【図5】回転テーブルが、中心軸のまわりの回転を可能とする中心ハブ(20)の上および下に2つの取付フレーム(上部フレーム(18)と下部フレーム(19))を有することを示す水平図である。上部フレーム(18)への取付は、その上に置かれる重りの支持を助ける6つのホイールである。さらに、回転ベースは電流をそれを通して流す整流リング(21)を有している。 上部回転ベースプラットホームの取付は、回転ベースを中心軸の周りに回転することを可能にする鎖組み立て部品(23)に取り付けられたモータと回転ギア駆動組み立て部品(22)である。上部フレーム組み立て部品(18)は回転し、下部プラットホーム(19)は固定のままである。それゆえ、モータとギア駆動組み立て部品(22)は上部プラットホーム(18)で回転する。
【図6】手動モードでの光制御の概略を示す。
【図7】自動モードでの光、音および動作制御の概略を示す。
【図8】生理的反応モードでの光、音および動作制御の概略を示す。
【図9】手動動作制御入力を示す。
【図10】自動動作制御の概略を示す。
【図11】生理的反応モードを使用した自動動作制御の概略を示す。
【図12】血管空気圧ポンプ/圧迫装置の概略を示す。
【図13】経皮電気的神経刺激(TENS)/神経筋肉刺激、これはクライアントの四肢に置かれる電極に電流を提供する。
【図14】生理反応入力として取り入れられる生理反応センサのリストを示す。
【図15】サポートプラットホームの頂部図を示し、クライアントはテーブルの上で横たわって、変換器は、両側の肩の範囲、下の背骨と各足に置かれている。テーブルの中でスピーカは頭が置かれる位置を示している。
【図16】ユーザの目の上に置かれるビデオヘッドセットを示す。
【図17】運動プログラムの間に使用される感覚刺激変数の実現を記載するデシジョンツリーを示す。
【符号の説明】
【0028】
1 垂直および水平プラットホーム
2 回転プラットホーム
3 視覚光学ライト機器
4 ビデオモニタ
5 下部滑車システムマウント
6 垂直線形アクチュエータ/ネジ機能
7 下部滑車システム
8 水平線形すべりレール
9 内部フレーム
10 水平取付プレート
11 水平ネジ機能
12 上部滑車システム
13 水平軸モータマウント
14 水平軸モータ
15 垂直軸モータ
16 垂直軸モータマウント
17 垂直線形すべり
18 取付フレーム上部
19 取付フレーム下部
20 センタハブ
21 整流リング
22 回転サーボモータとギア駆動組み立て部品
23 鎖組み立て部品
24 第1のマスタ制御オペレーティングシステム
25 第2の制御オペレーティングシステム
26 MIDIソフトウェアコード
27 DMX変換ソフトウェア
28 サウンドwavファイル
29 アナログ信号ソフトウェア変換
30 ヘッドフォン
31 スピーカ
32 サポートプラットホーム
33 変換器
35 マスタタイムラインコード
36 生理的反応センサ
37 手動制御インタフェース
38 触覚アンプ
39 GUIタッチスクリーンインターフェース
40 ビデオヘッドセット
41 動作コントローラ図9
42 1時間ごとのカウンタ
43 動作コントローラ図10上のアナログ入力出力カード
44 圧迫ポンプ/血管空気圧ポンプ
45 TENS/神経筋肉刺激
46 デシジョンツリーとシステム方法概観
47 オペレータ座席装置
48 視覚光学ライト機器のための関節アーム組み立て部品
49 関節アーム組み立て部品のための取付ポール
50 外部フレーム組み立て部品
51 回転動作プラットホーム
52 関節アーム組み立て部品
【特許請求の範囲】
【請求項1】
複数の感覚入力によって参加者に多感覚刺激を実行するための装置であって、概装置は、
回転動作プラットホームと、
関節アームに定着された視覚光学ライト機器と、該関節アームは取付ポールに取り付けられ、この取付ポールは回転動作プラットホームに取り付けられ、覚光学ライト機器は回転動作プラットホームに関して固定した位置のままであり、それゆえ、プラットホームの回転の間、回転動作プラットホームに関して静止したままに視覚入力を可能にし、
参加者を支えるためのサポートプラットホームと、
水平軸上にサポートプラットホームを動かすための水平線形アクチュエータと、
垂直軸上にサポートプラットホームを動かすための垂直線形アクチュエータと、
を備え、
感覚前庭入力は、2つの独立な軸でサポートプラットホームを動かすことによって提供され、制御の水平軸と垂直軸は最上の任意の二重軸動作プロファイルの中に挿入されることができ、
前記装置はアナログ/デジタル入力と出力機能を有する動作コントローラおよび動作のすべての3つの軸の独立制御を可能としている動作制御インターフェースによって制御される。
【請求項2】
サポートプラットホームは位置が調節でき、
視覚光学ライト機器は円形と幾何学的な形状の視覚ポートを有する筐体を持ち、視覚光学ライト機器はサポートプラットホーム上で回転する軸を有し、関節アーム上に位置し、
複数の感覚入力は、
回転動作プラットホームと、
視覚光学ライト機器と、
水平線形アクチュエータと、
垂直線形アクチュエータと、
ヘッドフォンセット、外部備え付けスピーカ、またはサポートテーブル変換器により提供される聴覚刺激と、
四肢の任意またはすべてに関節または筋肉圧迫を提供するための血管空気圧装置と、該血管空気圧装置は圧迫、熱または氷を同時に提供でき、
四肢の任意またはすべてに与えられる神経と筋肉の刺激と、
感覚入力の自動コントローラと、概自動コントローラはバイオフィードバック反応を基にしたセンサに反応し、
手動コンピュータプログラム選択インターフェースを有する感覚入力の手動コントローラと、
参加者の配置のため点滅するLEDライトを有するガラスまたは前記視覚光学ライト機器のどちらかを備えている視聴覚同調のための手段と、該視覚光学ライト機器は同調プロセッサから入力を受けとり、
視覚ヘッドセット装置が動作している間、参加者は周辺環境をみることができなく、大きなスクリーンイメージに投影される視覚ヘッドセットで提供される視覚情報のための手段と、
ヘッドフォンまたはスピーカによる聴覚刺激と光学視覚フィードバックを使用するソフトウェアベースの時限調整反復運動を統合し備え付けるための手段と、
プログラム選択のため予めプログラムされたパラメータでタッチスクリーンインターフェイスを組み込む第1のマスタ制御オペレーティングシステムのための手段と、
先端研究プログラムの柔軟性を有する第2の制御オペレーティングシステムのための手段と、
感覚入力変数と前記多感覚刺激装置に特別な臨床的テストデシジョンツリーを基にしたプログラムパラメータ選択と決定方法のための手段と、
を備えている請求項1に記載された多感覚装置。
【請求項3】
二重動作プラットホームのすべての3軸のアナログ/デジタル制御を可能とする自動制御モードをさらに備えている請求項1に記載の動作コントローラ。
【請求項4】
自動モードはアナログ/デジタルインターフェイスを含み、マスタ制御システムと結合し、該マスタ制御システムは二重動作プラットホームの動作制御を制御するためMIDI外部信号を提供する請求項3に記載の動作コントローラ。
【請求項5】
動作コントローラの中の入力に基づいて、アナログ/デジタルセンサを通してバイオフィードバックモジュールの中に統合される動作コントローラであって、
動作コントローラに送られる信号は動作コントローラの中のソフトウェアコードで計算され、バイオフィードバックモジュールから受け取ったバイオフィードバック信号に基づいて、二重動作プラットホームの速度の調整をする請求項3に記載の動作コントローラ。
【請求項6】
サポートプラットホームが3つの関節の位置で調節可能であり、その位置は、
下部四肢のための2つの位置と、
胴のための1つの位置とであり、
多感覚刺激を受けるために、
座ることと、
仰向けと、
持ち上げた足と、
横臥位と、
うつぶせと、
の位置を参加者に可能とする請求項2に記載の多感覚刺激システム。
【請求項7】
複数の寝る位置と座る位置は、サポートプラットホームを回転させる回転機能の中で実行され、水平軸に沿った90度範囲にロックされ、前記サポートプラットホームは、特別な目標とされた触覚センサ入力を提供するため複数の位置にサウンド変換器を持っている請求項6に記載のサポートプラットホーム。
【請求項8】
多感覚システムに備え付けられて、第1のマスタ制御システムのサウンドソースコードを通して、または、外部に備え付けられ、外部アンプで使用可能に選択された振動触覚変換器にオーディオ信号を送る、CD、DVD、MP3、ハードディスク、フラッシュメモリまたは同等のオーディオ再生装置を含むオーディオ再生装置を通して、制御された外部アンプをさらに含み、変換器選択オプションは、サポートプラットホーム上の仰向きにしている参加者に基づき、前記選択オプション上に位置している5台より少ない変換器を用いて、上部左、上部右、仙骨、下部左、下部右またはそれらの任意の組合せである請求項7に記載のサポートプラットホーム。
【請求項9】
視覚光学ライト機器は、段階的な方法で水平から垂直まで視覚の面の調整が可能であり、前記視覚光学ライト機器は、前記動作プラットホームの下部回転軸に取り付けられ、1つまたは複数の軸の前庭刺激が提供されている間、固定の位置のままでいることが可能であり、前記視覚光学ライト機器は前記下部回転動作プラットホームと回転する請求項1に記載の多感覚刺激システム。
【請求項10】
前記視覚光学ライト機器は、サポートプラットホームの間で、選択され、プログラムされ、視覚される異なる光スペクトル/色、調光範囲と点滅率を有する25の視覚ポートをさらに備えている請求項1に記載の多感覚刺激システム。
【請求項11】
LED球は一端がしっかりと圧縮されているゴム管状材料のなかに収容されており、ゴム管状材料は、機械加工プレートの中に挿入され、該プレートは透明ガラスレンズ、色つきレンズ、白ガラス反射器を収容し、円形の機械加工凹部は、ゴム管状材料を前記プレートの中にかみ合うように圧縮することができ、これらの25のゴム管状材料LEDの固定は、支持パネルでしっかり閉じられ、LED球は、25の球の配列の中に戦略的に置かれ、あらかじめプログラムされた選択を通して、またはカスタマイズした設定とソフトウェアと通して第2の制御オペレーティングシステムを通してマスタ制御オペレーティングシステムで制御される、前記LED球を備える請求項1に記載の視覚光学ライト機器。
【請求項12】
視覚刺激プログラムはクライアントの中心視野の中に置かれた停止をプログラムし、視覚光学ライト機器はクライアントの正面に置かれ、サポートプラットホームに基づいて位置され、前記視覚刺激プログラムを提供する請求項1に記載の視覚光学ライト機器。
【請求項13】
視覚刺激プログラムは、視覚追跡、前庭動眼反射回転プログラム、指向性攻撃と認識能力から構成され、予めプログラミングされた特別の色のスペクトルの視覚刺激を作成し、フラッシュ率は、全ての4象限のなかで、左から右へまたは右から左、上から下または下から上、または斜め左と右または右と左に動き、光は、視覚機器の完全な長さの予めプログラムされた列の中、または選択されたLEDに基づいた制限された範囲の中を動き、視覚光学ライト機器は、視覚追跡の際、方向の優先位置の中で回転されることが可能であり、同様にクライアントの胃や背と水平な面、またはクライアントが直立して座った位置またはその間の任意の位置と垂直な面のどこにでも位置可能であり、前記視覚刺激プログラムを提供する請求項1に記載の視覚光学ライト機器。
【請求項14】
LED光装置は、それ自身のコンピュータネットワークアドレスでアドレス指定され、この一意なアドレスは、前記LEDが第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムによって、無限の照明効果および性能特徴でプログラミングすることを可能にさせる、前記LED光装置を備える請求項1に記載の視覚光学ライト機器。
【請求項15】
LED光プログラム選択はクライアント性能目的のために定義され、MIDIおよびdmxソフトウェアコードを用いて第1のマスタ制御システムを通して制御され、第1のマスタ制御システムからの該ソフトウェア命令コードは、調光効果、点滅効果、色変化、LED位置変化および前記LED装置の指定時間で動作するプログラミングの順序づけを可能とする、請求項13に記載の視覚光学ライト機器。
【請求項16】
タッチスクリーンインターフェースは、LED照明効果、LED位置変化および前記LED装置の指定時間で動作するプログラミングの順序づけのために選択されたファイルを割り当て、格納し、読み出すためのテーブルファイルを使用し、第1のマスタ制御システムは該タッチスクリーンインターフェースを備えている請求項15に記載のソフトウェアコード。
【請求項17】
ヘッドホン、サポートテーブル、外部スピーカまたはそれらの任意の組合せを提供する第1のマスタ制御オペレーティングシステムを通して制御される聴覚刺激手段を備えている請求項3に記載の多感覚刺激システム。
【請求項18】
左右のサイドチャンネルのフィルタ周波数を独立に入力、サウンドに適用される変調タイプを選択し、左右のサイドチャンネルのバランスを選択する第1のマスタ制御オペレーティングシステムをさらに含んでいる請求項17に記載の聴覚刺激手段。
【請求項19】
左右のサイドチャンネルのフィルタ周波数を独立に入力、サウンドが適用される変調タイプを選択し、左右のサイドチャンネルのバランスを選択する第2の制御オペレーティングシステムをさらに含んでいる請求項18に記載の聴覚刺激手段。
【請求項20】
第2の制御オペレーティングシステムが、第1のマスタ制御オペレーティングシステムと同時に走行し、視覚光学ライト機器LED、二重動作プラットホームおよび聴覚刺激を制御する手段を含んでいる請求項1に記載の第2の制御オペレーティングシステム。
【請求項21】
第2の制御オペレーティングシステムが、多感覚刺激装置に取り付けられた第2のコンピュータ制御システム上で実行し、視覚光学ライト機器LED、二重動作プラットホーム、指示プラットホームおよび聴覚刺激を制御する手段を含んでいる請求項1に記載の第2の制御オペレーティングシステム。
【請求項22】
選択変数として熱または寒さを有し、外部に取り付けられた血管空気圧ポンプを用いる装置を有する圧迫手段を備えている請求項1に記載の多感覚刺激装置。
【請求項23】
第1のマスタ制御オペレーティングシステムおよび第2の制御オペレーティングシステムを通して、選択された解剖学的領域に神経筋肉刺激のための制御の手段を備えている請求項1に記載の多感覚刺激装置。
【請求項24】
選択された解剖学的領域に神経筋肉刺激のための手動制御の手段を備えている請求項1に記載の多感覚刺激装置。
【請求項25】
動作コントローラへの少なくとも1つのバイオフィードバックセンサ入力からのバイオフィードバック制御手段を備え、3軸の動作制御はバイオフィードバックセンサ入力を通して、独立または同時に制御される請求項1に記載の多感覚刺激装置。
【請求項26】
電気物理的信号のセンサのグループから選択されたセンサを用いるバイオフィードバック制御の手段を備え、該信号は、EEG(脳波図)、EMG(筋電図)、ECG(心電図)、EOG(眼電図)、SCP(遅い皮質電位)、GSR(皮膚電気反応−皮膚コンダクタンス)、呼吸、パルス酸素濃度、高分解能温度、BVP(フォトプレチスモグラフィー)、迷走神経緊張、HRV(心拍変動性)を含み、これらは動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、電気物理的フィードバックと多感覚刺激装置センサ入力の手動制御を可能とする請求項1に記載の多感覚刺激装置。
【請求項27】
電気物理的信号のセンサのグループから選択されたセンサを用いるバイオフィードバック制御の手段を備え、該信号は、EEG(脳波図)、EMG(筋電図)、ECG(心電図)、EOG(眼電図)、SCP(遅い皮質電位)、GSR(皮膚電気反応−皮膚コンダクタンス)、呼吸、パルス酸素濃度、高分解能温度、BVP(フォトプレチスモグラフィー)、迷走神経緊張、HRV(心拍変動性)を含み、これらは電気物理的フィードバックと動作コントローラの自動制御と3軸の動作を可能とする請求項1に記載の多感覚刺激装置。
【請求項28】
透明、色つき、または不透明ガラスとヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置によってモニタされ、動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、前記多感覚刺激装置の感覚刺激入力の手動制御が可能になる請求項1に記載の多感覚刺激装置。
【請求項29】
透明、色つき、または不透明ガラスとヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置によってモニタされ、バイオフィードバック制御装置の手段と、3軸の動作制御と命令のための動作コントローラへの入力を提供する電気物理的フィードバックによって、可能になる請求項1に記載の多感覚刺激装置。
【請求項30】
視覚光学ライト機器への入力手段とヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置の手段によってモニタされ、動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、前記多感覚刺激装置の感覚刺激入力の手動制御が可能になる請求項1に記載の多感覚刺激装置。
【請求項31】
刺激のため選択される感覚および運動系の完全性を評価する神経学および教育的評価プロセスを通して、参加者を評価し、
個別のプログラムの開発は、
i 行動パターンと不平の履歴を決定するため、クライアントの履歴を観察し受けとり、
ii 視野をテストし、
iii 聴覚をテストし、
iv 1.視覚システムと、
2.全ての反射神経と、
3.協調と、
4.筋肉骨格系と、
5.感覚システムと、
の神経学の検査をし、
v パラメータと感覚刺激選択のためデシジョンツリーの中にデータと検出事項を定量化する、
各ステップを含み、
二重動作プラットホーム上に参加者を設置し、該二重動作プラットホームは、
オペレータシートと、
第1のマスタ制御システムと、
第2の制御システムと、
動作コントローラインタフェース局と
を提供し、
サポートプラットホーム上に参加者を横たわったまたは座った位置に位置付け、
前記評価に基づいて適切な刺激を
参加者への感覚触覚刺激と、
視覚入力に対する参加者の前面の視覚光学ライト機器と、
聴覚刺激入力手段をしてヘッドフォンまたは外部スピーカのような聴覚入力ソースと、
圧迫感覚入力のための手段として最上の選択された四肢の血管空気圧ポンプスリーブと、
神経筋肉感覚刺激入力手段として参加者上の神経筋肉刺激パッドと、
脳波フィードバック同調感覚入力を提供するバイオフィードバック電気物理的測定と、から選択し
バイオフィードバックをモニタし、それに応じて感覚入力を制御する、
ステップを含んでいるシステムを用い、参加者に多感覚刺激を提供する方法。
【請求項32】
行動パターンと履歴のための定量化ステップは、中枢神経系アンバランスおよび大脳皮質葉アンバランスの一般化された理論的な位置を決定する請求項31に記載の方法。
【請求項33】
視野テストのための定量化ステップは、視野測定、および/または、視野の反射テストと視野の形状および大きさと盲点とを備えている請求項31に記載の方法。
【請求項34】
定量化ステップは、左右の耳の周波数反応をマッピングする純音閾値テストである請求項31に記載の方法。
【請求項35】
神経学試験のための定量化ステップは、大脳半球、大脳葉、脳幹、小脳、中枢神経系または末梢神経系構成のいずれかが理論的に機能不全であることを決定する請求項31に記載の方法。
【請求項36】
感覚刺激パラメータの初期設定の我々の評価と決定の客観的検出が前記多感覚刺激装置上で使用され、聴覚刺激手段、視覚光学ライト機器視覚刺激手段、神経筋肉刺激手段、指示プラットホーム手段と二重動作プラットホーム前庭入力手段のための設定を定め、該二重動作プラットホーム前庭入力手段は、第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムを通して制御され、第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムは、二重動作プラットホームの位置と視聴覚刺激ペアに基づいた前記刺激手段の非常に正確なタイミングシーケンスでクロスモーダルペアの制御の手段を提供する請求項31に記載の方法。
【請求項37】
時間とともに観察、測定、定量化およびパラメータ選択プロセスを繰り返すステップをさらに含んでいる請求項35に記載の方法。
【請求項38】
視覚と聴覚のキューおよび反応記録ソフトウェアを用いる時限調整プログラムを含んでいる請求項1に記載の多感覚刺激システム。
【請求項39】
視覚光学ライト機器への入力手段とヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置の手段によってモニタされ、3軸の動作制御と命令のための動作コントローラへのバイオフィードバックセンサ入力が可能になる請求項1に記載の多感覚刺激装置。
【請求項1】
複数の感覚入力によって参加者に多感覚刺激を実行するための装置であって、概装置は、
回転動作プラットホームと、
関節アームに定着された視覚光学ライト機器と、該関節アームは取付ポールに取り付けられ、この取付ポールは回転動作プラットホームに取り付けられ、覚光学ライト機器は回転動作プラットホームに関して固定した位置のままであり、それゆえ、プラットホームの回転の間、回転動作プラットホームに関して静止したままに視覚入力を可能にし、
参加者を支えるためのサポートプラットホームと、
水平軸上にサポートプラットホームを動かすための水平線形アクチュエータと、
垂直軸上にサポートプラットホームを動かすための垂直線形アクチュエータと、
を備え、
感覚前庭入力は、2つの独立な軸でサポートプラットホームを動かすことによって提供され、制御の水平軸と垂直軸は最上の任意の二重軸動作プロファイルの中に挿入されることができ、
前記装置はアナログ/デジタル入力と出力機能を有する動作コントローラおよび動作のすべての3つの軸の独立制御を可能としている動作制御インターフェースによって制御される。
【請求項2】
サポートプラットホームは位置が調節でき、
視覚光学ライト機器は円形と幾何学的な形状の視覚ポートを有する筐体を持ち、視覚光学ライト機器はサポートプラットホーム上で回転する軸を有し、関節アーム上に位置し、
複数の感覚入力は、
回転動作プラットホームと、
視覚光学ライト機器と、
水平線形アクチュエータと、
垂直線形アクチュエータと、
ヘッドフォンセット、外部備え付けスピーカ、またはサポートテーブル変換器により提供される聴覚刺激と、
四肢の任意またはすべてに関節または筋肉圧迫を提供するための血管空気圧装置と、該血管空気圧装置は圧迫、熱または氷を同時に提供でき、
四肢の任意またはすべてに与えられる神経と筋肉の刺激と、
感覚入力の自動コントローラと、概自動コントローラはバイオフィードバック反応を基にしたセンサに反応し、
手動コンピュータプログラム選択インターフェースを有する感覚入力の手動コントローラと、
参加者の配置のため点滅するLEDライトを有するガラスまたは前記視覚光学ライト機器のどちらかを備えている視聴覚同調のための手段と、該視覚光学ライト機器は同調プロセッサから入力を受けとり、
視覚ヘッドセット装置が動作している間、参加者は周辺環境をみることができなく、大きなスクリーンイメージに投影される視覚ヘッドセットで提供される視覚情報のための手段と、
ヘッドフォンまたはスピーカによる聴覚刺激と光学視覚フィードバックを使用するソフトウェアベースの時限調整反復運動を統合し備え付けるための手段と、
プログラム選択のため予めプログラムされたパラメータでタッチスクリーンインターフェイスを組み込む第1のマスタ制御オペレーティングシステムのための手段と、
先端研究プログラムの柔軟性を有する第2の制御オペレーティングシステムのための手段と、
感覚入力変数と前記多感覚刺激装置に特別な臨床的テストデシジョンツリーを基にしたプログラムパラメータ選択と決定方法のための手段と、
を備えている請求項1に記載された多感覚装置。
【請求項3】
二重動作プラットホームのすべての3軸のアナログ/デジタル制御を可能とする自動制御モードをさらに備えている請求項1に記載の動作コントローラ。
【請求項4】
自動モードはアナログ/デジタルインターフェイスを含み、マスタ制御システムと結合し、該マスタ制御システムは二重動作プラットホームの動作制御を制御するためMIDI外部信号を提供する請求項3に記載の動作コントローラ。
【請求項5】
動作コントローラの中の入力に基づいて、アナログ/デジタルセンサを通してバイオフィードバックモジュールの中に統合される動作コントローラであって、
動作コントローラに送られる信号は動作コントローラの中のソフトウェアコードで計算され、バイオフィードバックモジュールから受け取ったバイオフィードバック信号に基づいて、二重動作プラットホームの速度の調整をする請求項3に記載の動作コントローラ。
【請求項6】
サポートプラットホームが3つの関節の位置で調節可能であり、その位置は、
下部四肢のための2つの位置と、
胴のための1つの位置とであり、
多感覚刺激を受けるために、
座ることと、
仰向けと、
持ち上げた足と、
横臥位と、
うつぶせと、
の位置を参加者に可能とする請求項2に記載の多感覚刺激システム。
【請求項7】
複数の寝る位置と座る位置は、サポートプラットホームを回転させる回転機能の中で実行され、水平軸に沿った90度範囲にロックされ、前記サポートプラットホームは、特別な目標とされた触覚センサ入力を提供するため複数の位置にサウンド変換器を持っている請求項6に記載のサポートプラットホーム。
【請求項8】
多感覚システムに備え付けられて、第1のマスタ制御システムのサウンドソースコードを通して、または、外部に備え付けられ、外部アンプで使用可能に選択された振動触覚変換器にオーディオ信号を送る、CD、DVD、MP3、ハードディスク、フラッシュメモリまたは同等のオーディオ再生装置を含むオーディオ再生装置を通して、制御された外部アンプをさらに含み、変換器選択オプションは、サポートプラットホーム上の仰向きにしている参加者に基づき、前記選択オプション上に位置している5台より少ない変換器を用いて、上部左、上部右、仙骨、下部左、下部右またはそれらの任意の組合せである請求項7に記載のサポートプラットホーム。
【請求項9】
視覚光学ライト機器は、段階的な方法で水平から垂直まで視覚の面の調整が可能であり、前記視覚光学ライト機器は、前記動作プラットホームの下部回転軸に取り付けられ、1つまたは複数の軸の前庭刺激が提供されている間、固定の位置のままでいることが可能であり、前記視覚光学ライト機器は前記下部回転動作プラットホームと回転する請求項1に記載の多感覚刺激システム。
【請求項10】
前記視覚光学ライト機器は、サポートプラットホームの間で、選択され、プログラムされ、視覚される異なる光スペクトル/色、調光範囲と点滅率を有する25の視覚ポートをさらに備えている請求項1に記載の多感覚刺激システム。
【請求項11】
LED球は一端がしっかりと圧縮されているゴム管状材料のなかに収容されており、ゴム管状材料は、機械加工プレートの中に挿入され、該プレートは透明ガラスレンズ、色つきレンズ、白ガラス反射器を収容し、円形の機械加工凹部は、ゴム管状材料を前記プレートの中にかみ合うように圧縮することができ、これらの25のゴム管状材料LEDの固定は、支持パネルでしっかり閉じられ、LED球は、25の球の配列の中に戦略的に置かれ、あらかじめプログラムされた選択を通して、またはカスタマイズした設定とソフトウェアと通して第2の制御オペレーティングシステムを通してマスタ制御オペレーティングシステムで制御される、前記LED球を備える請求項1に記載の視覚光学ライト機器。
【請求項12】
視覚刺激プログラムはクライアントの中心視野の中に置かれた停止をプログラムし、視覚光学ライト機器はクライアントの正面に置かれ、サポートプラットホームに基づいて位置され、前記視覚刺激プログラムを提供する請求項1に記載の視覚光学ライト機器。
【請求項13】
視覚刺激プログラムは、視覚追跡、前庭動眼反射回転プログラム、指向性攻撃と認識能力から構成され、予めプログラミングされた特別の色のスペクトルの視覚刺激を作成し、フラッシュ率は、全ての4象限のなかで、左から右へまたは右から左、上から下または下から上、または斜め左と右または右と左に動き、光は、視覚機器の完全な長さの予めプログラムされた列の中、または選択されたLEDに基づいた制限された範囲の中を動き、視覚光学ライト機器は、視覚追跡の際、方向の優先位置の中で回転されることが可能であり、同様にクライアントの胃や背と水平な面、またはクライアントが直立して座った位置またはその間の任意の位置と垂直な面のどこにでも位置可能であり、前記視覚刺激プログラムを提供する請求項1に記載の視覚光学ライト機器。
【請求項14】
LED光装置は、それ自身のコンピュータネットワークアドレスでアドレス指定され、この一意なアドレスは、前記LEDが第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムによって、無限の照明効果および性能特徴でプログラミングすることを可能にさせる、前記LED光装置を備える請求項1に記載の視覚光学ライト機器。
【請求項15】
LED光プログラム選択はクライアント性能目的のために定義され、MIDIおよびdmxソフトウェアコードを用いて第1のマスタ制御システムを通して制御され、第1のマスタ制御システムからの該ソフトウェア命令コードは、調光効果、点滅効果、色変化、LED位置変化および前記LED装置の指定時間で動作するプログラミングの順序づけを可能とする、請求項13に記載の視覚光学ライト機器。
【請求項16】
タッチスクリーンインターフェースは、LED照明効果、LED位置変化および前記LED装置の指定時間で動作するプログラミングの順序づけのために選択されたファイルを割り当て、格納し、読み出すためのテーブルファイルを使用し、第1のマスタ制御システムは該タッチスクリーンインターフェースを備えている請求項15に記載のソフトウェアコード。
【請求項17】
ヘッドホン、サポートテーブル、外部スピーカまたはそれらの任意の組合せを提供する第1のマスタ制御オペレーティングシステムを通して制御される聴覚刺激手段を備えている請求項3に記載の多感覚刺激システム。
【請求項18】
左右のサイドチャンネルのフィルタ周波数を独立に入力、サウンドに適用される変調タイプを選択し、左右のサイドチャンネルのバランスを選択する第1のマスタ制御オペレーティングシステムをさらに含んでいる請求項17に記載の聴覚刺激手段。
【請求項19】
左右のサイドチャンネルのフィルタ周波数を独立に入力、サウンドが適用される変調タイプを選択し、左右のサイドチャンネルのバランスを選択する第2の制御オペレーティングシステムをさらに含んでいる請求項18に記載の聴覚刺激手段。
【請求項20】
第2の制御オペレーティングシステムが、第1のマスタ制御オペレーティングシステムと同時に走行し、視覚光学ライト機器LED、二重動作プラットホームおよび聴覚刺激を制御する手段を含んでいる請求項1に記載の第2の制御オペレーティングシステム。
【請求項21】
第2の制御オペレーティングシステムが、多感覚刺激装置に取り付けられた第2のコンピュータ制御システム上で実行し、視覚光学ライト機器LED、二重動作プラットホーム、指示プラットホームおよび聴覚刺激を制御する手段を含んでいる請求項1に記載の第2の制御オペレーティングシステム。
【請求項22】
選択変数として熱または寒さを有し、外部に取り付けられた血管空気圧ポンプを用いる装置を有する圧迫手段を備えている請求項1に記載の多感覚刺激装置。
【請求項23】
第1のマスタ制御オペレーティングシステムおよび第2の制御オペレーティングシステムを通して、選択された解剖学的領域に神経筋肉刺激のための制御の手段を備えている請求項1に記載の多感覚刺激装置。
【請求項24】
選択された解剖学的領域に神経筋肉刺激のための手動制御の手段を備えている請求項1に記載の多感覚刺激装置。
【請求項25】
動作コントローラへの少なくとも1つのバイオフィードバックセンサ入力からのバイオフィードバック制御手段を備え、3軸の動作制御はバイオフィードバックセンサ入力を通して、独立または同時に制御される請求項1に記載の多感覚刺激装置。
【請求項26】
電気物理的信号のセンサのグループから選択されたセンサを用いるバイオフィードバック制御の手段を備え、該信号は、EEG(脳波図)、EMG(筋電図)、ECG(心電図)、EOG(眼電図)、SCP(遅い皮質電位)、GSR(皮膚電気反応−皮膚コンダクタンス)、呼吸、パルス酸素濃度、高分解能温度、BVP(フォトプレチスモグラフィー)、迷走神経緊張、HRV(心拍変動性)を含み、これらは動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、電気物理的フィードバックと多感覚刺激装置センサ入力の手動制御を可能とする請求項1に記載の多感覚刺激装置。
【請求項27】
電気物理的信号のセンサのグループから選択されたセンサを用いるバイオフィードバック制御の手段を備え、該信号は、EEG(脳波図)、EMG(筋電図)、ECG(心電図)、EOG(眼電図)、SCP(遅い皮質電位)、GSR(皮膚電気反応−皮膚コンダクタンス)、呼吸、パルス酸素濃度、高分解能温度、BVP(フォトプレチスモグラフィー)、迷走神経緊張、HRV(心拍変動性)を含み、これらは電気物理的フィードバックと動作コントローラの自動制御と3軸の動作を可能とする請求項1に記載の多感覚刺激装置。
【請求項28】
透明、色つき、または不透明ガラスとヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置によってモニタされ、動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、前記多感覚刺激装置の感覚刺激入力の手動制御が可能になる請求項1に記載の多感覚刺激装置。
【請求項29】
透明、色つき、または不透明ガラスとヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置によってモニタされ、バイオフィードバック制御装置の手段と、3軸の動作制御と命令のための動作コントローラへの入力を提供する電気物理的フィードバックによって、可能になる請求項1に記載の多感覚刺激装置。
【請求項30】
視覚光学ライト機器への入力手段とヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置の手段によってモニタされ、動作制御入力インターフェースの手段、第1のマスタ制御オペレーティングシステムと第2の制御オペレーティングシステムによって、前記多感覚刺激装置の感覚刺激入力の手動制御が可能になる請求項1に記載の多感覚刺激装置。
【請求項31】
刺激のため選択される感覚および運動系の完全性を評価する神経学および教育的評価プロセスを通して、参加者を評価し、
個別のプログラムの開発は、
i 行動パターンと不平の履歴を決定するため、クライアントの履歴を観察し受けとり、
ii 視野をテストし、
iii 聴覚をテストし、
iv 1.視覚システムと、
2.全ての反射神経と、
3.協調と、
4.筋肉骨格系と、
5.感覚システムと、
の神経学の検査をし、
v パラメータと感覚刺激選択のためデシジョンツリーの中にデータと検出事項を定量化する、
各ステップを含み、
二重動作プラットホーム上に参加者を設置し、該二重動作プラットホームは、
オペレータシートと、
第1のマスタ制御システムと、
第2の制御システムと、
動作コントローラインタフェース局と
を提供し、
サポートプラットホーム上に参加者を横たわったまたは座った位置に位置付け、
前記評価に基づいて適切な刺激を
参加者への感覚触覚刺激と、
視覚入力に対する参加者の前面の視覚光学ライト機器と、
聴覚刺激入力手段をしてヘッドフォンまたは外部スピーカのような聴覚入力ソースと、
圧迫感覚入力のための手段として最上の選択された四肢の血管空気圧ポンプスリーブと、
神経筋肉感覚刺激入力手段として参加者上の神経筋肉刺激パッドと、
脳波フィードバック同調感覚入力を提供するバイオフィードバック電気物理的測定と、から選択し
バイオフィードバックをモニタし、それに応じて感覚入力を制御する、
ステップを含んでいるシステムを用い、参加者に多感覚刺激を提供する方法。
【請求項32】
行動パターンと履歴のための定量化ステップは、中枢神経系アンバランスおよび大脳皮質葉アンバランスの一般化された理論的な位置を決定する請求項31に記載の方法。
【請求項33】
視野テストのための定量化ステップは、視野測定、および/または、視野の反射テストと視野の形状および大きさと盲点とを備えている請求項31に記載の方法。
【請求項34】
定量化ステップは、左右の耳の周波数反応をマッピングする純音閾値テストである請求項31に記載の方法。
【請求項35】
神経学試験のための定量化ステップは、大脳半球、大脳葉、脳幹、小脳、中枢神経系または末梢神経系構成のいずれかが理論的に機能不全であることを決定する請求項31に記載の方法。
【請求項36】
感覚刺激パラメータの初期設定の我々の評価と決定の客観的検出が前記多感覚刺激装置上で使用され、聴覚刺激手段、視覚光学ライト機器視覚刺激手段、神経筋肉刺激手段、指示プラットホーム手段と二重動作プラットホーム前庭入力手段のための設定を定め、該二重動作プラットホーム前庭入力手段は、第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムを通して制御され、第1のマスタ制御オペレーティングシステムまたは第2の制御オペレーティングシステムは、二重動作プラットホームの位置と視聴覚刺激ペアに基づいた前記刺激手段の非常に正確なタイミングシーケンスでクロスモーダルペアの制御の手段を提供する請求項31に記載の方法。
【請求項37】
時間とともに観察、測定、定量化およびパラメータ選択プロセスを繰り返すステップをさらに含んでいる請求項35に記載の方法。
【請求項38】
視覚と聴覚のキューおよび反応記録ソフトウェアを用いる時限調整プログラムを含んでいる請求項1に記載の多感覚刺激システム。
【請求項39】
視覚光学ライト機器への入力手段とヘッドフォンジャックからのサウンド入力が適用された視聴覚同調刺激の手段を備え、同調システムはバイオフィードバック制御装置の手段によってモニタされ、3軸の動作制御と命令のための動作コントローラへのバイオフィードバックセンサ入力が可能になる請求項1に記載の多感覚刺激装置。
【図1】


【図1a】
【図1b】
【図2】
【図2a】
【図2b】
【図3】
【図3a】
【図3b】
【図3c】
【図3d】
【図3e】
【図4】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図1a】
【図1b】
【図2】
【図2a】
【図2b】
【図3】
【図3a】
【図3b】
【図3c】
【図3d】
【図3e】
【図4】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2009−502363(P2009−502363A)
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願番号】特願2008−524251(P2008−524251)
【出願日】平成18年7月31日(2006.7.31)
【国際出願番号】PCT/US2006/029698
【国際公開番号】WO2007/016471
【国際公開日】平成19年2月8日(2007.2.8)
【出願人】(508027718)
【氏名又は名称原語表記】STEINERT, John, William
【Fターム(参考)】
【公表日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願日】平成18年7月31日(2006.7.31)
【国際出願番号】PCT/US2006/029698
【国際公開番号】WO2007/016471
【国際公開日】平成19年2月8日(2007.2.8)
【出願人】(508027718)
【氏名又は名称原語表記】STEINERT, John, William
【Fターム(参考)】
[ Back to top ]