
削孔ロッドの配置角管理システム及び配置角管理方法
【課題】削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステムを提供する。
【解決手段】地盤Gを削孔するに先立ち当該地盤G上に配置された削孔ロッド3の配置角を管理するシステム1であって、削孔ロッド3に装着可能とされ、かつ当該装着状態において削孔ロッド3の傾斜角α及び真方位角を計測可能とされたモノリシックリングレーザジャイロ10と、このジャイロ3によって計測された計測傾斜角及び予め計画された計画傾斜角、並びにジャイロ10によって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段20と、を有する。
【解決手段】地盤Gを削孔するに先立ち当該地盤G上に配置された削孔ロッド3の配置角を管理するシステム1であって、削孔ロッド3に装着可能とされ、かつ当該装着状態において削孔ロッド3の傾斜角α及び真方位角を計測可能とされたモノリシックリングレーザジャイロ10と、このジャイロ3によって計測された計測傾斜角及び予め計画された計画傾斜角、並びにジャイロ10によって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段20と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステム及び方法に関するものである。
【背景技術】
【0002】
土木等の技術分野においては、各種の目的で地盤を削孔する。例えば、地盤中の水を排水するための集水管(排水管)や、下水管、水道管、ガス管、各種ケーブルを通すための埋設管等を地盤に建て込む際に地盤を削孔する。また、薬液注入工法、液状化対策工法、汚染地盤の浄化対策工法、アンカー設置工法等の各種工法においても地盤を掘削する。
【0003】
そして、目的による程度の差は存在するが、地盤を削孔するに際しては、削孔の精度、すなわち計画削孔位置に対して実削孔位置がどの程度ずれているのかが問題となる。そこで、本出願人は、削孔ロッドに角速度検出器や傾斜角検出器を設け、これらの検出器によって検出された方位角変化量及び傾斜角を用いて、実削孔位置を算出する方法を提案している(例えば、特許文献1参照。)。
【0004】
もっとも、このようにして実削孔位置を算出したとしても、この算出結果から実削孔位置を具体的にイメージするのは容易なことではない。特に、実削孔位置が計画削孔位置からどの程度ずれているのかをイメージするのは困難である。そこで、本出願人は、実削孔位置を容易にイメージすることができ、また、実削孔位置が計画削孔位置からどの程度ずれているのかも容易にイメージすることができる方法を提案している(例えば、特許文献2参照。)。
【0005】
このような方法の提案によって、現在では、精度が極めて高い削孔を行うことができるようになっている。しかしながら、いまだ次に示す問題が残っている。
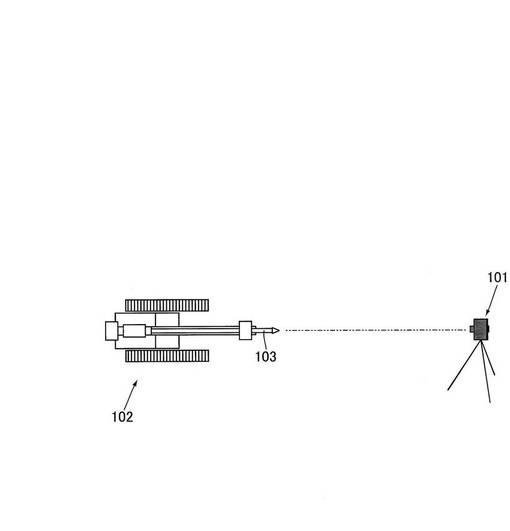
すなわち、上記した方法においては、削孔開始時における削孔ロッドの配置角(姿勢)を基準に検出、演算等の作業を行うことになるため、削孔開始時における削孔ロッドの配置角を正確に管理しなければならない。しかるに、従来、この配置角の管理は、トランシット等の測量器を用いて行っていた(例えば、特許文献3の「背景技術」参照。)。これは、例えば、図4に示すように、計画削孔線の法線上にトランシットや光波測量器等の測量器101を設置し、この測量器101によって削孔機102によって保持された削孔ロッド103の通りを合わせるというものである。したがって、緻密な作業が要求され作業効率が悪いとの問題や、誤差が生じる可能性があるとの問題がある。
【0006】
この点、特許文献3は、これらの問題が解決されるとする提案であるが、特殊な検知装置(方位傾斜角検知装置)の使用を前提するものであり、しかも基準方位の算出にトランシットを必要とする。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−183375号公報
【特許文献2】特開2003−85594号公報
【特許文献3】特開2006−90025号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明が解決しようとする主たる課題は、削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステム及び方法を提供することにある。
【課題を解決するための手段】
【0009】
この課題を解決した本発明は、次の通りである。
〔請求項1記載の発明〕
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステムであって、
前記削孔ロッドに装着可能とされ、かつ当該装着状態において前記削孔ロッドの傾斜角及び真方位角を計測可能とされたモノリシックリングレーザジャイロと、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段と、を有する、
ことを特徴とする削孔ロッドの配置角管理システム。
【0010】
〔請求項2記載の発明〕
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理する方法であって、
前記削孔ロッドに傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロを装着するとともに、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段を設置する、
ことを特徴とする削孔ロッドの配置角管理方法。
【0011】
(主な作用効果)
リングレーザジャイロは可動部を有しないため振動に強いとの特性を有する。また、モノリシックリングレーザジャイロは3軸一体構造であるため振動が加わった際に各軸に生じる振動パターンが近似するとの特性、各軸のリングレーザの配置が重心点に対して対象になっているためシステム誤差が少ないと特性を有する。つまり、モノリシックリングレーザジャイロは、極めて振動に強く、しかも精度が高いとの特性を有する。したがって、削孔ロッドの配置角調節に際して当該削孔ロッドに装着されたモノリシックリングレーザジャイロに振動が生じたとしても、高い精度で削孔ロッドの傾斜角及び真方位角を計測することができる。結果、削孔ロッドの配置角を配置角表示手段にリアルタイムに表示し(モニタリング)、当該表示手段を目視しながら配置角の確認や調節等の管理を行うことができる。しかも、この管理は作業者(オペレータ)一人で行うことができる。
また、削孔ロッドにモノリシックリングレーザジャイロを装着するシステム・方法は極めて汎用的であり、しかも、計画削孔線の法線上に建屋が存在したり、海や川等が存在したりして測量器を設置することができない場合であっても、適用することができる。
なお、傾斜計等の検出器は、動いている物体の計測を高精度で行うことができない。したがって、傾斜計等の検出器を使用して削孔ロッドの配置角をモニタリングしながら当該削孔ロッドの配置角を調節するということはできない。
【発明の効果】
【0012】
本発明によると、削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステム及び方法となる。
【図面の簡単な説明】
【0013】
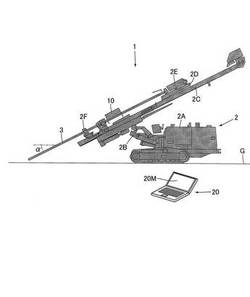
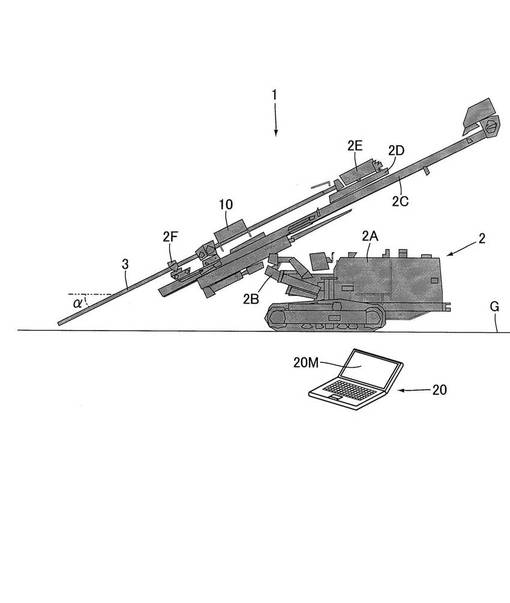
【図1】配置角管理システムの概念側面図である。
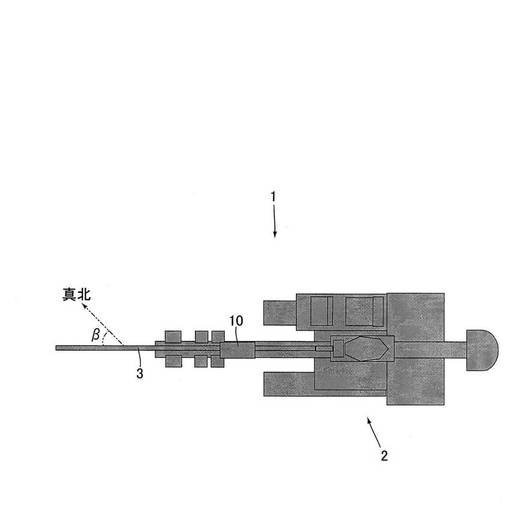
【図2】配置角管理システムの概念平面図である。ただし、配置角表示手段は図示していない。
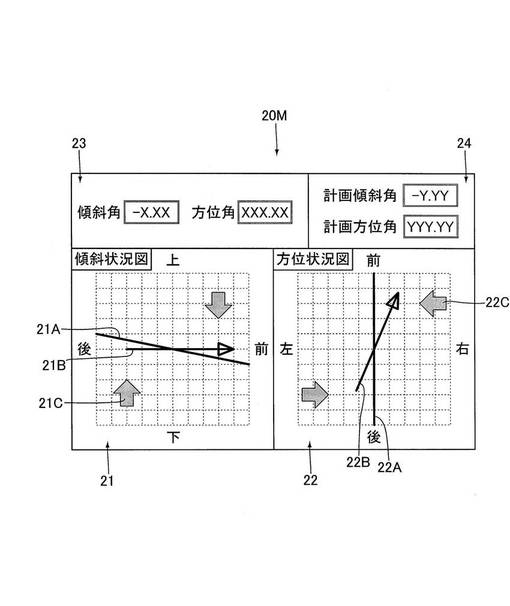
【図3】配置角表示手段による表示例である。
【図4】従来の測量器を用いた削孔ロッドの配置角管理システムの概念図である。
【発明を実施するための形態】
【0014】
次に、本発明の実施の形態を説明する。
図1及び図2に、地盤Gを削孔する削孔ロッド3の配置角管理システム1を示した。削孔ロッド3は、先端部に図示しない削孔ビッドが備えられた削孔管等からなり、削孔機2によって保持されている。
【0015】
具体的には、まず、削孔機2は、地盤G上を移動可能な本体部2Aを有し、この本体部2Aからはアーム部2Bが延出している。アーム部2Bは棒状のガイドセル2Cを保持しており、このガイドセル2C上に当該ガイドセル2Cの延在(長手)方向に移動可能とされたスライド手段2Dが備えられている。このスライド手段2D上には回転・打撃手段2Eが備えられており、この回転・打撃手段2Eの先端部に削孔ロッド3の後端部が保持されている。削孔ロッド3は、スライド手段2Dがガイドセル2C上を延在方向に移動すると、この移動に伴ってガイドセル2Cの延在方向に移動する。また、削孔ロッド3は、削孔時において回転・打撃手段2Eによって軸心回りに回転させられ、かつ軸方向(削孔方向)への衝撃が与えられる。なお、削孔ロッド3の先端部側は、ガイドセル2Cの先端部上に備えられたチャック部2Fによって軸心回りの回転が可能となるように、かつ軸方向への移動が可能となるように保持されている。
【0016】
このようにしてなる削孔機2を用いて削孔ロッド3の配置位置や配置角を調節するにあたっては、本体部2Aを削孔開始位置近くまで移動し、作業者(オペレータ)が削孔機2の側面等に備わる配置角調節レバー群等を適宜操作してアーム部2Bを操作する。
【0017】
以上のように保持された削孔ロッド3には、傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロ(MRLG)10を装着する。このモノリシックリングレーザジャイロ10は、前述したように振動に極めて強く、しかも精度が高いとの特性を有する。したがって、削孔ロッド3の配置角を後述するパーソナルコンピュータ20にリアルタイムに表示し(モニタリング)、当該パーソナルコンピュータ20を目視しながら配置角の確認や調節等の管理を行うことができる。また、図1及び図2から明らかにように、本配置角管理システム1においては、削孔機2の前方に何ら機器を設置する必要がないため、計画削孔線の法線上に建屋が存在したり、海や川等が存在したりする場合であっても、配置角を管理することができる。
【0018】
モノリシックリングレーザジャイロ10としては、例えば、KEARFOTT社製のT−16E、T−16B、T−24等を使用することができる。これらのジャイロは、地球の自転の水平分力を検出し、この検出値から真方位角を演算するものであり、極めて高い検出精度を有する。
【0019】
モノリシックリングレーザジャイロ10は、金属製のケース等に収納して直接的に、又は他の部材を介して間接的に、削孔ロッド3に装着する。図示例では、モノリシックリングレーザジャイロ10が削孔ロッド3の上に備え置かれ、適宜の部材を用いて削孔ロッド3に固定されている。
【0020】
本形態の配置角管理システム1には、配置角表示手段の一例としてパーソナルコンピュータ20が備えられている。このパーソナルコンピュータ20のモニター(表示部)20Mには、傾斜角や真方位角等の各種情報が表示される。具体的には、モノリシックリングレーザジャイロ10によって計測された計測傾斜角及び予め計画された計画傾斜角、並びにジャイロ10によって計測された計測真方位角及び予め計画された計画真方位角が、それぞれ対照可能に表示される。
【0021】
この表示の方法としては様々な形態が考えられ、例えば、図3に示すように、計測表示部23に計測傾斜角及び計測真方位角を左右に並べて表示し、計画表示部24に計画傾斜角及び計画真方位角を上下に並べて表示することができる。この表示方法によっても作業者は、計測傾斜角及び計画傾斜角、並びに計測真方位角及び計画真方位角をそれぞれ比較し、この比較結果に基づいて削孔ロッド3の配置角を調節することができる。
【0022】
もっとも、この方法によると、計測傾斜角及び計測真方位角がそれぞれ計画傾斜角及び計画真方位角からどの程度ずれているのかを具体的にイメージするのが容易ではない。そこで、本形態においては、表示部20Mに傾斜角や真方位角を2次元的な直線状の図形として表示する傾斜状況図(部)21及び方位状況図(部)22を設けている。傾斜状況図21は、計測傾斜角を直線矢印で示す計測傾斜線21B及び計画傾斜角を直線で示す計画傾斜線21Aを重ねて表示する2次元図面であり、方位状況図22は、計測真方位角を直線矢印で示す計測真方位線22B及び計画真方位角を直線で示す計画真方位線22Aを重ねて表示する2次元図面である。この表示方法であれば、計測傾斜角及び計測真方位角がそれぞれ計画傾斜角及び計画真方位角からどの程度ずれているのかを視覚的に確認することができ、具体的にイメージすることができる。特に本形態においては、傾斜状況図21に傾斜角の修正方向を示す操作指示矢印21Cが表示され、方位状況図22に真方位角の修正方向を示す操作指示矢印22Cが表示される。したがって、作業者Pは、当該矢印21C,22Cに従って、当該矢印21C,22Cが示す方向に配置角調節レバー群を操作すれば足りる。
【0023】
次に、本形態の配置角管理システム1を使用して削孔ロッド3の配置角を管理する方法について説明する。
図1及び図2に示すように、まず、削孔ロッド3を削孔開示時の削孔方向に沿うように削孔機2によって保持する。この際の削孔ロッド3の配置角(傾斜角α及び真方位角β)はおおよそで足り、また、単に水平方向に保持するのでもよい。
【0024】
次に、このようにして配置した削孔ロッド3に、モノリシックリングレーザイジャイロ10を装着する。この装着は、上記削孔機2による削孔ロッド3の保持に先立って行うこともできる。
【0025】
一方、これらの作業と同時に、あるいは前後してパーソナルコンピュータ20を設置する。この設置は、例えば、削孔機2の側部等に備わる図示しない配置角調節レバー群の近くに設置台を設置し、この設置台上にパーソナルコンピュータ20を設置する形態によると好適である。
【0026】
以上のようにしてモノリシックリングレーザジャイロ10の装着及びパーソナルコンピュータ20の設置が終了したら、これらの電源等を入れて両装置10,20を起動し、モノリシックリングレーザジャイロ10によって計測された傾斜角及び真方位角をパーソナルコンピュータ20の表示部20Mに表示させる。なお、モノリシックリングレーザジャイロ10からパーソナルコンピュータ20への計測情報(出力情報)の送信は、有線で行うことも、無線で行うこともできる。
【0027】
パーソナルコンピュータ20が受信した計測情報は、パーソナルコンピュータ20の図示しない演算部等において図形表示情報に変換する。この変換に際しては、カルマンフィルターの原理等を利用して表示情報を補正することもできる。適宜補正等が行われた図形表示情報に基づいて、表示部20Mの傾斜状況図21や方位状況図22には、各種情報が表示される。本形態においては、各種情報の1つとして、前述したように操作指示矢印21C,22Cが表示されるため、作業者Pは、当該矢印21C,22Cに従って配置角調節レバー群を操作し、削孔ロッド3の配置角を調節する。
【0028】
この配置角の調節が終了したら、削孔ロッド3による削孔を開始する。モノリシックリングレーザジャイロ10は、当該削孔の開始に先立って取り外すこともできる。
【産業上の利用可能性】
【0029】
本発明は、地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステム及び方法として適用可能である。
【符号の説明】
【0030】
1…配置角管理システム、2…削孔機、2A…本体部、2B…アーム部、2C…ガイドセル、2D…スライド手段、2E…回転・打撃手段、2F…チャック部、10…モノリシックリングレーザジャイロ、20…パーソナルコンピュータ、20M…モニター、21…傾斜状況図、22…方位状況図、23…計測表示部、24…計画表示部、101…測量器、102…削孔機、103…削孔ロッド、G…地盤。
【技術分野】
【0001】
本発明は、地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステム及び方法に関するものである。
【背景技術】
【0002】
土木等の技術分野においては、各種の目的で地盤を削孔する。例えば、地盤中の水を排水するための集水管(排水管)や、下水管、水道管、ガス管、各種ケーブルを通すための埋設管等を地盤に建て込む際に地盤を削孔する。また、薬液注入工法、液状化対策工法、汚染地盤の浄化対策工法、アンカー設置工法等の各種工法においても地盤を掘削する。
【0003】
そして、目的による程度の差は存在するが、地盤を削孔するに際しては、削孔の精度、すなわち計画削孔位置に対して実削孔位置がどの程度ずれているのかが問題となる。そこで、本出願人は、削孔ロッドに角速度検出器や傾斜角検出器を設け、これらの検出器によって検出された方位角変化量及び傾斜角を用いて、実削孔位置を算出する方法を提案している(例えば、特許文献1参照。)。
【0004】
もっとも、このようにして実削孔位置を算出したとしても、この算出結果から実削孔位置を具体的にイメージするのは容易なことではない。特に、実削孔位置が計画削孔位置からどの程度ずれているのかをイメージするのは困難である。そこで、本出願人は、実削孔位置を容易にイメージすることができ、また、実削孔位置が計画削孔位置からどの程度ずれているのかも容易にイメージすることができる方法を提案している(例えば、特許文献2参照。)。
【0005】
このような方法の提案によって、現在では、精度が極めて高い削孔を行うことができるようになっている。しかしながら、いまだ次に示す問題が残っている。
すなわち、上記した方法においては、削孔開始時における削孔ロッドの配置角(姿勢)を基準に検出、演算等の作業を行うことになるため、削孔開始時における削孔ロッドの配置角を正確に管理しなければならない。しかるに、従来、この配置角の管理は、トランシット等の測量器を用いて行っていた(例えば、特許文献3の「背景技術」参照。)。これは、例えば、図4に示すように、計画削孔線の法線上にトランシットや光波測量器等の測量器101を設置し、この測量器101によって削孔機102によって保持された削孔ロッド103の通りを合わせるというものである。したがって、緻密な作業が要求され作業効率が悪いとの問題や、誤差が生じる可能性があるとの問題がある。
【0006】
この点、特許文献3は、これらの問題が解決されるとする提案であるが、特殊な検知装置(方位傾斜角検知装置)の使用を前提するものであり、しかも基準方位の算出にトランシットを必要とする。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2004−183375号公報
【特許文献2】特開2003−85594号公報
【特許文献3】特開2006−90025号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明が解決しようとする主たる課題は、削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステム及び方法を提供することにある。
【課題を解決するための手段】
【0009】
この課題を解決した本発明は、次の通りである。
〔請求項1記載の発明〕
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステムであって、
前記削孔ロッドに装着可能とされ、かつ当該装着状態において前記削孔ロッドの傾斜角及び真方位角を計測可能とされたモノリシックリングレーザジャイロと、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段と、を有する、
ことを特徴とする削孔ロッドの配置角管理システム。
【0010】
〔請求項2記載の発明〕
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理する方法であって、
前記削孔ロッドに傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロを装着するとともに、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段を設置する、
ことを特徴とする削孔ロッドの配置角管理方法。
【0011】
(主な作用効果)
リングレーザジャイロは可動部を有しないため振動に強いとの特性を有する。また、モノリシックリングレーザジャイロは3軸一体構造であるため振動が加わった際に各軸に生じる振動パターンが近似するとの特性、各軸のリングレーザの配置が重心点に対して対象になっているためシステム誤差が少ないと特性を有する。つまり、モノリシックリングレーザジャイロは、極めて振動に強く、しかも精度が高いとの特性を有する。したがって、削孔ロッドの配置角調節に際して当該削孔ロッドに装着されたモノリシックリングレーザジャイロに振動が生じたとしても、高い精度で削孔ロッドの傾斜角及び真方位角を計測することができる。結果、削孔ロッドの配置角を配置角表示手段にリアルタイムに表示し(モニタリング)、当該表示手段を目視しながら配置角の確認や調節等の管理を行うことができる。しかも、この管理は作業者(オペレータ)一人で行うことができる。
また、削孔ロッドにモノリシックリングレーザジャイロを装着するシステム・方法は極めて汎用的であり、しかも、計画削孔線の法線上に建屋が存在したり、海や川等が存在したりして測量器を設置することができない場合であっても、適用することができる。
なお、傾斜計等の検出器は、動いている物体の計測を高精度で行うことができない。したがって、傾斜計等の検出器を使用して削孔ロッドの配置角をモニタリングしながら当該削孔ロッドの配置角を調節するということはできない。
【発明の効果】
【0012】
本発明によると、削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステム及び方法となる。
【図面の簡単な説明】
【0013】
【図1】配置角管理システムの概念側面図である。
【図2】配置角管理システムの概念平面図である。ただし、配置角表示手段は図示していない。
【図3】配置角表示手段による表示例である。
【図4】従来の測量器を用いた削孔ロッドの配置角管理システムの概念図である。
【発明を実施するための形態】
【0014】
次に、本発明の実施の形態を説明する。
図1及び図2に、地盤Gを削孔する削孔ロッド3の配置角管理システム1を示した。削孔ロッド3は、先端部に図示しない削孔ビッドが備えられた削孔管等からなり、削孔機2によって保持されている。
【0015】
具体的には、まず、削孔機2は、地盤G上を移動可能な本体部2Aを有し、この本体部2Aからはアーム部2Bが延出している。アーム部2Bは棒状のガイドセル2Cを保持しており、このガイドセル2C上に当該ガイドセル2Cの延在(長手)方向に移動可能とされたスライド手段2Dが備えられている。このスライド手段2D上には回転・打撃手段2Eが備えられており、この回転・打撃手段2Eの先端部に削孔ロッド3の後端部が保持されている。削孔ロッド3は、スライド手段2Dがガイドセル2C上を延在方向に移動すると、この移動に伴ってガイドセル2Cの延在方向に移動する。また、削孔ロッド3は、削孔時において回転・打撃手段2Eによって軸心回りに回転させられ、かつ軸方向(削孔方向)への衝撃が与えられる。なお、削孔ロッド3の先端部側は、ガイドセル2Cの先端部上に備えられたチャック部2Fによって軸心回りの回転が可能となるように、かつ軸方向への移動が可能となるように保持されている。
【0016】
このようにしてなる削孔機2を用いて削孔ロッド3の配置位置や配置角を調節するにあたっては、本体部2Aを削孔開始位置近くまで移動し、作業者(オペレータ)が削孔機2の側面等に備わる配置角調節レバー群等を適宜操作してアーム部2Bを操作する。
【0017】
以上のように保持された削孔ロッド3には、傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロ(MRLG)10を装着する。このモノリシックリングレーザジャイロ10は、前述したように振動に極めて強く、しかも精度が高いとの特性を有する。したがって、削孔ロッド3の配置角を後述するパーソナルコンピュータ20にリアルタイムに表示し(モニタリング)、当該パーソナルコンピュータ20を目視しながら配置角の確認や調節等の管理を行うことができる。また、図1及び図2から明らかにように、本配置角管理システム1においては、削孔機2の前方に何ら機器を設置する必要がないため、計画削孔線の法線上に建屋が存在したり、海や川等が存在したりする場合であっても、配置角を管理することができる。
【0018】
モノリシックリングレーザジャイロ10としては、例えば、KEARFOTT社製のT−16E、T−16B、T−24等を使用することができる。これらのジャイロは、地球の自転の水平分力を検出し、この検出値から真方位角を演算するものであり、極めて高い検出精度を有する。
【0019】
モノリシックリングレーザジャイロ10は、金属製のケース等に収納して直接的に、又は他の部材を介して間接的に、削孔ロッド3に装着する。図示例では、モノリシックリングレーザジャイロ10が削孔ロッド3の上に備え置かれ、適宜の部材を用いて削孔ロッド3に固定されている。
【0020】
本形態の配置角管理システム1には、配置角表示手段の一例としてパーソナルコンピュータ20が備えられている。このパーソナルコンピュータ20のモニター(表示部)20Mには、傾斜角や真方位角等の各種情報が表示される。具体的には、モノリシックリングレーザジャイロ10によって計測された計測傾斜角及び予め計画された計画傾斜角、並びにジャイロ10によって計測された計測真方位角及び予め計画された計画真方位角が、それぞれ対照可能に表示される。
【0021】
この表示の方法としては様々な形態が考えられ、例えば、図3に示すように、計測表示部23に計測傾斜角及び計測真方位角を左右に並べて表示し、計画表示部24に計画傾斜角及び計画真方位角を上下に並べて表示することができる。この表示方法によっても作業者は、計測傾斜角及び計画傾斜角、並びに計測真方位角及び計画真方位角をそれぞれ比較し、この比較結果に基づいて削孔ロッド3の配置角を調節することができる。
【0022】
もっとも、この方法によると、計測傾斜角及び計測真方位角がそれぞれ計画傾斜角及び計画真方位角からどの程度ずれているのかを具体的にイメージするのが容易ではない。そこで、本形態においては、表示部20Mに傾斜角や真方位角を2次元的な直線状の図形として表示する傾斜状況図(部)21及び方位状況図(部)22を設けている。傾斜状況図21は、計測傾斜角を直線矢印で示す計測傾斜線21B及び計画傾斜角を直線で示す計画傾斜線21Aを重ねて表示する2次元図面であり、方位状況図22は、計測真方位角を直線矢印で示す計測真方位線22B及び計画真方位角を直線で示す計画真方位線22Aを重ねて表示する2次元図面である。この表示方法であれば、計測傾斜角及び計測真方位角がそれぞれ計画傾斜角及び計画真方位角からどの程度ずれているのかを視覚的に確認することができ、具体的にイメージすることができる。特に本形態においては、傾斜状況図21に傾斜角の修正方向を示す操作指示矢印21Cが表示され、方位状況図22に真方位角の修正方向を示す操作指示矢印22Cが表示される。したがって、作業者Pは、当該矢印21C,22Cに従って、当該矢印21C,22Cが示す方向に配置角調節レバー群を操作すれば足りる。
【0023】
次に、本形態の配置角管理システム1を使用して削孔ロッド3の配置角を管理する方法について説明する。
図1及び図2に示すように、まず、削孔ロッド3を削孔開示時の削孔方向に沿うように削孔機2によって保持する。この際の削孔ロッド3の配置角(傾斜角α及び真方位角β)はおおよそで足り、また、単に水平方向に保持するのでもよい。
【0024】
次に、このようにして配置した削孔ロッド3に、モノリシックリングレーザイジャイロ10を装着する。この装着は、上記削孔機2による削孔ロッド3の保持に先立って行うこともできる。
【0025】
一方、これらの作業と同時に、あるいは前後してパーソナルコンピュータ20を設置する。この設置は、例えば、削孔機2の側部等に備わる図示しない配置角調節レバー群の近くに設置台を設置し、この設置台上にパーソナルコンピュータ20を設置する形態によると好適である。
【0026】
以上のようにしてモノリシックリングレーザジャイロ10の装着及びパーソナルコンピュータ20の設置が終了したら、これらの電源等を入れて両装置10,20を起動し、モノリシックリングレーザジャイロ10によって計測された傾斜角及び真方位角をパーソナルコンピュータ20の表示部20Mに表示させる。なお、モノリシックリングレーザジャイロ10からパーソナルコンピュータ20への計測情報(出力情報)の送信は、有線で行うことも、無線で行うこともできる。
【0027】
パーソナルコンピュータ20が受信した計測情報は、パーソナルコンピュータ20の図示しない演算部等において図形表示情報に変換する。この変換に際しては、カルマンフィルターの原理等を利用して表示情報を補正することもできる。適宜補正等が行われた図形表示情報に基づいて、表示部20Mの傾斜状況図21や方位状況図22には、各種情報が表示される。本形態においては、各種情報の1つとして、前述したように操作指示矢印21C,22Cが表示されるため、作業者Pは、当該矢印21C,22Cに従って配置角調節レバー群を操作し、削孔ロッド3の配置角を調節する。
【0028】
この配置角の調節が終了したら、削孔ロッド3による削孔を開始する。モノリシックリングレーザジャイロ10は、当該削孔の開始に先立って取り外すこともできる。
【産業上の利用可能性】
【0029】
本発明は、地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステム及び方法として適用可能である。
【符号の説明】
【0030】
1…配置角管理システム、2…削孔機、2A…本体部、2B…アーム部、2C…ガイドセル、2D…スライド手段、2E…回転・打撃手段、2F…チャック部、10…モノリシックリングレーザジャイロ、20…パーソナルコンピュータ、20M…モニター、21…傾斜状況図、22…方位状況図、23…計測表示部、24…計画表示部、101…測量器、102…削孔機、103…削孔ロッド、G…地盤。
【特許請求の範囲】
【請求項1】
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステムであって、
前記削孔ロッドに装着可能とされ、かつ当該装着状態において前記削孔ロッドの傾斜角及び真方位角を計測可能とされたモノリシックリングレーザジャイロと、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段と、を有する、
ことを特徴とする削孔ロッドの配置角管理システム。
【請求項2】
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理する方法であって、
前記削孔ロッドに傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロを装着するとともに、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段を設置する、
ことを特徴とする削孔ロッドの配置角管理方法。
【請求項1】
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理するシステムであって、
前記削孔ロッドに装着可能とされ、かつ当該装着状態において前記削孔ロッドの傾斜角及び真方位角を計測可能とされたモノリシックリングレーザジャイロと、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段と、を有する、
ことを特徴とする削孔ロッドの配置角管理システム。
【請求項2】
地盤を削孔するに先立ち当該地盤上に配置された削孔ロッドの配置角を管理する方法であって、
前記削孔ロッドに傾斜角及び真方位角を計測可能なモノリシックリングレーザジャイロを装着するとともに、
このジャイロによって計測された計測傾斜角及び予め計画された計画傾斜角、並びに前記ジャイロによって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段を設置する、
ことを特徴とする削孔ロッドの配置角管理方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−241379(P2012−241379A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−111083(P2011−111083)
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000115463)ライト工業株式会社 (137)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000115463)ライト工業株式会社 (137)
【Fターム(参考)】
[ Back to top ]