
削岩リグ、岩盤穿孔方法および削岩リグの制御システム

本発明は、削岩リグ、削岩方法、および削岩リグの制御システムに関する。削岩リグ(1)は、穿孔穴(21)を穿孔穴パターンとして穿孔する穿孔ユニット(6)を含む。穿孔ユニットの位置が決められ、制御装置(16)は、与えられた目標位置に基づいて操作部材(19)を使って、穿孔ユニットの位置に影響を与えるアクチュエータ(19)を制御するように構成されている。操作部材のそれぞれ個々の操作方向は、1つの座標もしくは方向角についてのみ目標位置に影響を与えるように構成されている。さらに、操作部材の操作方向は穿孔ユニットの運動方向に対して直感的であるように構成されている。
【発明の詳細な説明】
【発明の背景】
【0001】
本発明は、1本以上の穿孔ブームを備えた可動キャリアを含む削岩リグに関するものである。穿孔ブームには、岩盤に穿孔穴を穿孔する削岩機を含む穿孔ユニットが設けられている。削岩リグは穿孔穴を所望のパターンとして穿孔するのに用いることができる。
【0002】
さらに本発明は、削岩リグを用いてドリル穴を所望の穿孔パターンとして穿孔する削岩方法および削岩用の制御システムに関するものである。
【0003】
本発明の分野は、本願の独立請求項の前提部においてより詳細に明らかになる。
【0004】
岩盤を円形に穿孔することがある。その場合まず、穿孔穴を岩盤に穿孔し、その後、穿孔穴に装薬して発破する。種々のトンネル、地下倉庫ホール、貯蔵施設、駐車場または他の同様な岩盤洞穴を掘削によって岩盤内に形成できる。しかし、このような岩盤洞穴が掘削される岩盤が常に、そのままで十分に堅く、均一で、安定しているわけではない。また、円形部を発破することにより、岩盤洞穴を形成する岩盤を破壊したり、そうでなくても弱くなったりして、掘削後に岩盤の堅さが不十分となる場合がある。したがって、岩盤洞穴の天井および壁、ときには床も、補強しなければならないことは、むしろ通常のことである。補強は、複数の補強穴を岩盤に穿孔し、そこに岩盤ボルト、ケーブルまたは同様の補強部材もしくは補強材料を入れることで行なうことができる。補強穴は通常、トンネル線に対して横断する向きになるように扇状パターンとして穿孔される。扇状穿孔において、穿孔ユニットはトンネルに対して横断する向きに配置される。穿孔穴は、補強穴のためばかりでなく、いわゆるプロダクション削岩リグによって掘削穴をプロダクショントンネルの壁および天井に穿孔する場合も、扇状に穿孔される。扇形穿孔穴の穿孔において見られる1つの問題は、穿孔ユニットの位置決め動作により通常、他の位置決め方向も変更する必要が生ずることである。したがって、ドリルブームを動かし穿孔ユニットを位置決めすることは、操作者にとって難しいと見られていた。
【発明の簡単な説明】
【0005】
本発明は、穿孔穴を穿孔穴パターンとして穿孔する新規で改善された削岩リグ、ならびに岩盤穿孔の方法および制御システムを提供することを目的とする。
【0006】
本発明による削岩リグは以下の点を特徴とする。すなわち、制御装置は少なくとも1つの穿孔モードを含み、このモードにおいて、操作部材のそれぞれ個々の操作方向は、穿孔パターンにて決められた1つの座標もしくは方向角についてのみ穿孔ユニットの物理的位置決め動作を生成するように構成され、他の座標および方向は不変を維持し、操作部材の影響方向を穿孔モードにおいて選択し、穿孔ユニットの直感的運動方向に対応させ、これによって操作部材を1つの操作方向に動かして削岩ユニットの実際の動きを操作部材の動きに対応した方向に生成することである。
【0007】
本発明による方法は以下の点を特徴とする。すなわち、手操作部材のそれぞれ個々の操作方向を関連付けて、1つの座標もしくは方向角についてのみ削岩ユニットの位置に影響を与え、目標位置および操作部材を動かす場合は直感的接続を用い、これによって穿孔ユニットおよび操作部材の実際の動きの方向を互いに一致させることである。
【0008】
本発明による制御システムは以下の点を特徴とする。すなわち、制御システムは少なくとも1つの穿孔モードを含み、このモードでは、操作部材のそれぞれ個々の操作方向を拘束して穿孔ユニットを1つの座標もしくは方向角に制御し、操作部材の操作方向を穿孔モードにおいて選択して、制御装置の直感的運動方向に対応させることである。
【0009】
一概念によれば、削岩リグの制御システムは1つ以上の穿孔モードを含み、穿孔すべき穿孔穴の開始点に手動で穿孔ユニットを操作者の操作の下に位置決めする。穿孔ユニットは操作部材の動きに対応して動く。手動操作部材を動かすことによって、穿孔ユニットの位置および方向に制御システムが影響を与えるように構成され、これにより操作部材が個々のアクチュエータもしくは継手を何ら直接制御することはない。制御システムは、ブームの継手について目標位置を決め、穿孔ユニットの位置決めに影響を与えるアクチュエータをそれに応じて制御する。穿孔モードに接続されると、手操作部材を動かすことで穿孔ユニットを1つの座標もしくは方向角に対する位置決め動作を生ずる。残りの座標および方向は不変に維持される。さらに、操作部材の操作方向を各穿孔モードごとに選択し、穿孔ユニットの直感的運動方向に対応させる。
【0010】
1つの利点は、穿孔モードを手動位置決めに使用する場合、削岩リグは従前より効率的に使用できることである。操作者は、操作部材によって穿孔ユニットに新たな目標位置を指示し、制御システムは要求された動作に応え、これによって操作者の示した目標を実際に達成する。操作者は、ブームの継手もしくは動力学を考える必要なく穿孔ユニットの所望の動きを達成し、制御システムに穿孔ユニットの目標位置を与えることにのみ専念することができる。これに従って、制御システムは要求された動きを自動的に行なう。操作者は、穿孔ユニットを例えば一度に1つの座標方向および方向角ずつ位置決めすることができる。穿孔ユニットの目標を動かしても、その時に操作部材により影響を受けない座標および方向は、不変に維持される。扇形穿孔モードにおいて、例えば操作者は、誤って穿孔ユニットを扇形平面の外に位置決めすることなく、穿孔する扇形平面上に穿孔ユニットを位置決めすることができる。これによって操作者の精神的負担が軽減され、操作が促進される。操作部材の操作方向を各穿孔モードごとに選択して穿孔ユニットの直感的運動方向に対応させることによって、操作はさらに実質的に容易になり、促進される。したがって、操作者は、選択した操作方向に操作部材を動かせばどの方向に穿孔ユニットが動くかを常時、知ることが容易になる。直感的制御であるため、操作者は削岩機の制御システムの経験をほとんど必要としない。
【0011】
一実施例に概念によれば、トンネル切羽における掘削穿孔穴の穿孔と補強扇形部の穿孔の両方に同じ削岩リグを使用する。
【0012】
一実施例の概念によれば、制御モードにおいて穿孔ユニットを動かしてそのモードによって決まる穿孔方向に自然になるように構成する。扇形穿孔モードでは、例えば、穿孔ユニットを動かして穿孔を上方および横方向に自然に向くようにする。手操作部材の影響を生ずる方向を選択して穿孔ユニットの論理的運動方向に一致させ、これによって操作部材を1つの操作方向に動かして穿孔ユニットの実際の動きを操作部材の操作方向に生成する。こうして、制御装置に直感的行動が達成され、これによって操作者の作業がかなり容易になる。
【0013】
一実施例の概念によれば、手動操作部材は、前方および後方と両側すなわち左右の操作運動を有するジョイスティックである。さらに、上述の操作運動中に補助スイッチによって他の機能を選択すると制御指令の数が2倍もしくは複数倍になるものでもよい。一般に、穿孔ブームとその穿孔ユニットを制御するこのような2本のジョイスティックがある。操作者は、ディスプレイ装置にて、例えば特定の場合ごとにどのブームおよび穿孔ユニットを制御すべきか、ジョイスティックで選択することができる。
【0014】
一実施例の概念によれば、切羽および補強孔の穿孔を意図した削岩リグは2本以上のブームを有し、そのそれぞれに穿孔ユニットが設けられている。この削岩リグを使用すれば、岩盤洞穴の切羽において掘削穿孔穴を1つ以上の穿孔ユニットで穿孔し、これと同時に1つ以上の穿孔ユニットで扇形補強穴を穿孔することができる。したがって、1つの位置の削岩リグで同時に2つの作業工程を賄うことができ、これによって、削岩リグを個々に位置決めしナビゲートして補強穴を穿孔する必要がないので、時間の節約になる。
【0015】
一実施例の概念によれば、削岩リグはプロダクション削岩リグであり、これは、トンネルもしくは同様の岩盤洞穴の天井および壁に掘削穴を穿孔パターンとして穿孔できる。被穿孔穴の数、場所、寸法、奥行きおよび方向と、穿孔に必要な他の情報は、穿孔パターンにおいて決めてよい。
【0016】
一実施例の概念では、穿孔ユニットは扇形穿孔リグであり、これは、削岩リグが穿孔扇形面上で回動可能であり、穿孔扇形部における被穿孔穴を回転角の方向に向けることができる。穿孔ユニットの回動はいわゆる枢軸点に対して行なうことができ、その位置は操作者が穿孔扇形部平面上で決めることができる。
【0017】
一実施例の概念によれば、扇形穿孔リグにおいてドリルビットの前端部に枢軸点があるよう決め、これによって次の被穿孔穴の回転角を枢軸点に対して変えることができる。
【0018】
一実施例の概念によれば、扇形穿孔において穿孔扇形部のすべてもしくは複数の穿孔穴の中心軸の仮想延長線が1つの枢軸点を通過するようにこれらの穿孔穴を方向付けることができる。ここで、穿孔穴は削岩リグにより穿孔されるが、その場合、穿孔ユニットは穿孔扇形平面上で枢軸点を中心として回動する。扇形平面上の枢軸点の位置は操作部材によって移動させることができる。操作者は、新たな目標位置を枢軸点に与え、その後、制御装置はブーム継手に新しい目標値を決め、ブームに影響を与えるアクチュエータを制御して操作者の指示した目標位置へ枢軸点が移動するようにする。1つの座標方向における操作部材の動きを拘束して、扇形平面上で1つの座標についてのみ枢軸点を移動させる。操作部材をx方向に動かすと、枢軸点も同様にx方向に移動し、また操作部材をz方向に動かすと、枢軸点はz方向に移動する。操作部材の操作方向は、枢軸点の実際の動きの方向について操作部材が直感的動作をとるように構成することができる。
【0019】
一実施例の概念によれば、削岩リグの制御装置のユーザインタフェースは少なくとも1つのディスプレイ装置を含み、ディスプレイ装置は、表示画面を表示して手動位置決めを容易にすることができる。この表示画面は、穿孔パターンにて決定された穿孔ユニットの位置および穿孔穴の場所を操作者に示す視覚ツールである。手動操作部材の操作方向は表示画面に示される方向に拘束される。したがって、手動操作部材の1つの操作方向は、表示画面に示された1つの方向に穿孔ユニットの目標位置を制御するように構成されている。
【0020】
一実施例の概念によれば、ディスプレイ装置は、互いに異なる画像を有する少なくとも2つの分割画面を含む表示画面を提示する。すなわち、各分割画面において見る方向が異なるものである。分割画面は、被穿孔穴の開始点を位置決めするxz方向の扇形平面に対して決定された穿孔ユニットの位置および方向を表示することができる。分割画面は表示画面において同時にアクティブである。したがってディスプレイ装置は、穿孔ユニットの位置決めに関するすべての必要情報を単一の表示画面に同時に表示する。第1の分割画面は、トンネル線の方向の扇形平面のxz画像でよい。すなわち、扇形平面をy方向から見ている。第2の分割画面は、扇形平面を上から、すなわちz軸の方向から見た同じ扇形平面のxy面の方向における画像でよい。したがって第1の分割画面は、扇形平面の方向における穿孔ユニットの位置を示し、第2の分割画面は、奥行きの方向における穿孔ユニットの位置を示す。これにより操作者は、単一の表示画面において穿孔ユニットの位置決めに影響を与えるすべての座標方向を同時に見ることができる。さらに、第1の分割画面および第2の分割画面は、表示画面においてディスプレイ装置の垂直方向に上下に同時に表示することができる。さらに、垂直方向に上下に配置された分割画面には、穿孔ユニットを示す記号を横方向から見て同じ場所に表示することができる。このような表示画面はとくに図式的であり、状況の明瞭なイメージを操作者に提供する。この適用例は、扇形穿孔ばかりでなく、例えばベンチ穿孔などの表面穿孔にも利用することができる。
【0021】
一実施例の概念によれば、先ず扇形穿孔において穿孔扇形平面の場所を決め、穿孔ユニットをその穿孔扇形平面上に位置決めする。次いで、穿孔ユニットをその扇形平面上に保ち、穿孔ユニットの位置がy座標の方向で変わることなく以降の位置決めもしくは照準工程を行なう。ここで、目標位置は、穿孔扇形平面に影響を及ぼすことなく操作部材によって穿孔扇形平面の方向に動く。扇形平面上での穿孔ユニットの位置決めは位置決めの第1段階、すなわち粗い位置決めと考えてよく、また、扇形平面上での移動は第2の位置決め、すなわち細かい位置決めと考えてよい。
【0022】
一実施例の概念によれば、先ず扇形穿孔において穿孔扇形の場所を決定し、穿孔ユニットをその穿孔扇形平面上に位置決めする。次いで、制御装置に指令を出して穿孔ユニットの移動をロックし、穿孔ユニットは、次に行なわれる位置決め動作中、扇形平面上の位置を保つ。このようにして、操作者が誤って穿孔ユニットをy座標の方向に扇形平面から離れるように動かす状況が回避される。
【0023】
一実施例の概念によれば、穿孔扇形平面に対する扇形穿孔リグのキャリアの位置決め誤差は制御装置で考慮する。したがって、削岩リグを穿孔扇形平面に対して垂直に位置決めする必要はなく、削岩リグを扇形平面に対して斜めの位置に保ってもよい。キャリアの位置誤差はナビゲーションに関連して判定され、これによって制御装置は、位置誤差を考慮に入れて穿孔ユニットを穿孔パターンにおける決められた方向に案内する。
【0024】
一実施例の概念によれば、削岩リグは表層掘削リグである。表層掘削リグにより、例えばベンチ穿孔を行なう場合、所望の穿孔穴パターンが穿孔される。穿孔穴パターンは複数の穿孔穴を含み、これらは一般に、所望の角度で下方へ、もしくは斜め下方へ向けられている。このような穿孔穴パターンに対して穿孔パターンを事前に設計し、例えば穿孔穴の数、開始点の位置、穿孔穴の奥行き、ならびに方向を決めることができる。穿孔パターンは、削岩リグの制御装置に入力することができ、本願に記載の方式で操作者に提示することができる。操作者はまた、穿孔パターン、もしくは個々の穴の位置および方向と各穴に関する他の情報とを自身で決めてもよく、さらに各穴の穿孔に際し、本願で上述したように補助手段として制御装置のディスプレイ装置を方向付けおよび位置決めに利用してもよい。さらに、表層掘削リグには、本願に記載した種類の穿孔モードが設けられ、穿孔モードでは、穿孔ユニットは操作者の手動操作で被穿孔穴の開始点に位置決めすることができる。削岩ユニットは操作部材の動きに応じて動く。手動操作部材を動かすと、穿孔ユニットの位置および方向が制御システムにより影響を受けるように構成され、このため操作部材が個々のアクチュエータもしくは継手を直接制御することはない。制御システムはブーム継手の目標位置を決定し、穿孔ユニットの位置決めに影響を与えるアクチュエータをそれに応じて制御する。穿孔モードがオンの場合、手動操作部材を1つの方向に動かせば、1つの座標もしくは方向角に対する穿孔ユニットの位置決め動作が発生する。残りの座標および方向は変化しない。これは、いわゆる座標制御である。さらに、表層掘削モードにおいて操作部材の操作方向を選択し、穿孔ユニットの直感的運動方向に一致させる。
【0025】
一実施例の概念によれば、削岩リグは表層掘削リグであり、その制御システムはジョイスティックなどの2つの操作部材を含む。第1のジョイスティックは、ドリルビットの位置を直交座標系におけるx-y平面上で制御するのに用いられる。この位置は、例えば一回に1座標ずつ変更することができる。ドリルビットの高さ位置、すなわちz座標は、例えば押しボタンによって変更してもよい。第2のジョイスティックは、実質的に垂直に向けられた送りビームを前後に傾斜させたり、また削岩リグの横方向に傾斜させたりする制御に用いられる。送りビームを傾斜させても、ドリルビットの位置は変わらない。表層掘削モードであるため、第1の操作部材を1つの方向に動かすことによって1つの座標に対するドリルビットの位置決め動作が発生するが、残りの座標は変わらない。第2の操作部材を1つの操作方向に動かすことによって、表層掘削モードでは、ドリルビットの位置もしくは他の方向角に影響を及ぼすことなく送りビームの1つの方向角に変化が生ずる。さらに、操作部材により生ずる実際の制御動作の変化率が操作部材の傾斜度に直接比例するように構成してもよい。
【0026】
一実施例の概念によれば、削岩リグは表層掘削リグであり、その制御システムは、制御に際して、鉱山の座標系やプロジェクト座標系に代えて、削岩リグについてリグ固有の別の座標系を利用する。削岩リグのキャリアの傾きは1つ以上のセンサもしくは測定装置によって判定する。同様に、ブームの全継手角度もセンサもしくは測定装置によって判定する。したがって制御システムは、ドリルビットの前端部の正確な位置および送りビームの傾斜を連続的に計算することができる。制御装置は、操作者の手動制御指令を考慮に入れて必要なアクチュエータを制御し、操作者により示されたドリルビットの目標位置および方向を自動的に実現する。したがって、位置決めの際に操作者が個々のアクチュエータを操作するのではなく、制御装置が座標制御を自動的に行なう。
【図面の簡単な説明】
【0027】
本発明のいくつかの実施例を添付図面にて、より詳細に説明する。
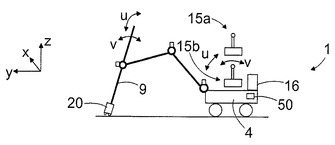
【図1】岩盤穿孔ユニットがトンネル線の方向に穿孔穴を穿孔し、またトンネル線に対して横断方向に穿孔穴を穿孔することが可能な削岩リグを示す模式的側面図である。
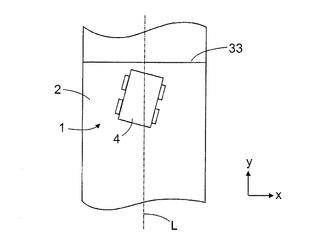
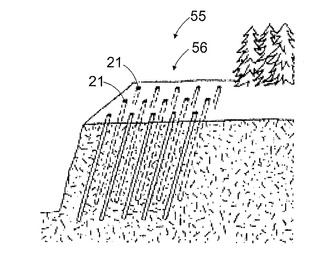
【図2】トンネル切羽内に配置された穿孔パターンおよびトンネルの掘削された部分に配置されたボルト打設パターンを示す斜視図である。
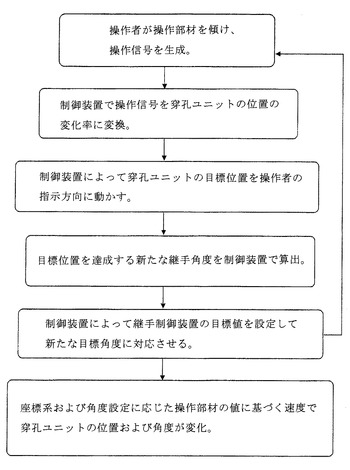
【図3】制御システムの機能を示す模式的フローチャートである。
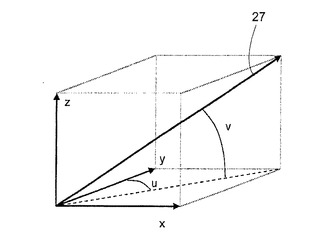
【図4】掘削穿孔穴の穿孔において用いられるx、y、z直交座標系と方向角uおよびvを示す模式図である。
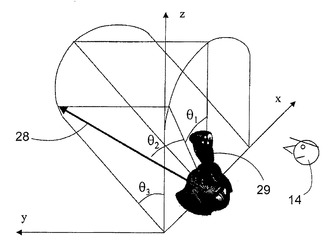
【図5】操作部材と、x、y、z直交座標系と、扇形を穿孔する際に用いられる方向角θ1およびθ2とを示す模式図である。
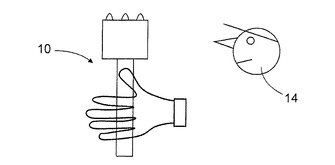
【図6】操作の直感的動作原理を非常に簡略化して示す模式図である。
【図7】補強モードにおける穿孔ユニットの位置決め作業を示す模式図である。
【図8】扇形穿孔を意図した削岩リグのユーザインタフェースおよびその接続を示す模式図である。
【図9】ディスプレイ装置に表示され上下に配置された2つの分割画面を有する表示画面の模式図であり、観察中の穿孔扇形部の平面および穿孔ユニットが2つの異なる画像で示されている。
【図10】プロダクション掘削リグの扇形穿孔ユニットを示す図である。
【図11】第2のプロダクション掘削リグの扇形穿孔ユニットをトンネル線の方向から見た模式図である。
【図12】扇形平面に対して斜めの位置に配置された削岩リグの模式的上面図である。
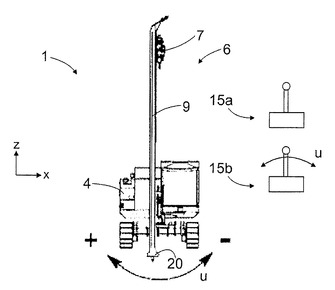
【図13】表層掘削モードにおける表層削岩リグの前面とその送りビームのリグの横方向における傾斜を示す模式図である。
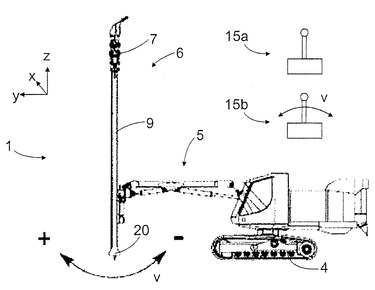
【図14】表層穿孔モードにおける表層掘削リグの側面とその送りビームの前後方向における傾斜を示す模式図である
【図15a】穿孔モードにおいてドリルビットを座標制御により先ずx-y平面上に、次いで上方向、すなわちz方向に位置決めすることを示す模式的側面図である。
【図15b】穿孔モードにおいて座標制御により送りビームを方向付け、これによって方向付け中はドリルビットの位置が変わらないことを示す模式的側面図であり。
【図16】表層掘削の適用の一対象であるベンチ穿孔の原理を示す模式図である。
【0028】
明瞭にするため、本発明の実施例を簡略化して示す。各図において同様の部分は同じ参照番号で示す。
【発明のいくつかの実施例の詳細な説明】
【0029】
図1は、トンネルもしくは同様の岩盤洞穴の切羽3においてナビゲートされる削岩リグ1を示す。削岩リグ1は、1本以上の穿孔ブーム5を備えた可動キャリア4を有し、各ブームはそれぞれ、その最外端部に岩盤穿孔ユニット6を有している。岩盤穿孔ユニット6は削岩機7を有し、これは、送り装置8によって動いて、送りビーム9によって案内することができる。削岩機7は、削岩機に取り付けた工具10に対して衝撃パルスを与える衝撃装置を有してもよい。さらに、削岩機7は工具10を回転させる回転装置を有してもよい。穿孔ユニット6は、ブーム5を動かすことによって所期の穿孔穴の開始位置11aに配置することができる。穿孔パターンを穿孔用にあらかじめ設計することができ、パターンは、被穿孔穴の開始位置、終了点、方向、長さおよび寸法を穿孔パターンの座標系により決めることができる。円形12の穿孔用およびロックボルト扇形部13用に別々に穿孔パターンを設計してもよい。削岩リグ1を穿孔場所へ移動させる場合、先ず削岩リグの座標系を作業現場の座標系に接続するナビゲーションを行なう。さらに、穿孔パターンの座標系は、削岩リグの座標系および作業現場の座標系、すなわち、いわゆるプロジェクト座標系に接続してもよい。
【0030】
まず穿孔パターンにより決められた開始位置および方向に穿孔ユニット6を位置決めした後、実際の穿孔サイクルを各穿孔穴に対して自動的に行なうことができる。穿孔ユニット6は手動で位置決めしてもよい。そこで操作者は、操作部材15により穿孔ユニット6に新しい目標位置を与え、これに基づいて制御システムは、ブーム5の各継手の目標位置および必要な動作を決定し、アクチュエータによって継手を新しい目標へ導く。制御システムは1台以上の制御装置16を有してよく、これは、ブームの物理的構造および現在位置に基づいて必要な動きを決定することができるコンピュータもしくはプロセッサでよい。ブーム5は、継手17aにより互いに接続された2つ以上のブーム部品5a、5bからなっていてもよい。さらに、ブーム5は継手17bによってキャリアに、また継手17cによって穿孔ユニット6に接続されている。穿孔ブーム5は、図1では明瞭にするため非常に簡略化したブームのみを示すが、多様に動かすことができる構造体である。継手17に関連して、センサ18もしくは同様の測定装置が配され、これらから得られた位置情報に基づいて制御装置16はブームの位置を判定することができる。ブーム5およびその各部は、アクチュエータによって動かすことができ、アクチュエータは、操作者14により指示された目標位置およびブーム5の位置情報に基づいて制御装置16により制御することができる。明瞭にするため、図1はセンサおよびアクチュエータを1つのみ示している。
【0031】
位置決めの際に、穿孔ユニット5の位置は、工具10の最外端部にあるドリルビット20の位置に基づいて観察することができる。なぜなら、ドリルビット20を被穿孔穴の開始位置11aへ導くのが目的だからである。方向は工具10の長手方向軸として観察することができる。図1において、穿孔ユニット5は、岩盤洞穴の切羽内の穿孔すべき掘削穿孔穴21の点に配置されている。トンネル2は、その切羽3において複数の掘削穿孔穴21を実質的にトンネル線Lの方向に穿孔することによって掘削され、各穴は穿孔後に装薬される。発破作業では、岩盤材料は円形部12の分だけ岩盤から取り除かれる。もちろん、掘削穿孔穴は、例えばいわゆる見張り角の分だけ幾分斜めに向けてもよい。切羽穿孔パターンにおける掘削穿孔穴21は、例えばプロファイル穴、フィールド穴およびカット穴を含む。掘削穴21の唯一の目的は、円形を所望の奥行長に形成し、計画通り妥当な大きさの破片として岩盤を剥離することを確実に行なうことである。円形部を発破すると、トンネルを画成する岩盤に損傷を与える可能性があり、または安全なトンネルを保証するには岩盤の固さが本来不十分である可能性がある。したがって、トンネル2の天井22および壁23を補強する必要があることがある。岩盤は、ロックボルトもしくは同様の補強材を打設可能な複数の隣接する補強穿孔穴24を所定のパターンに従って穿孔することによって、強化することができる。補強穿孔穴24の数、奥行き、直径、開始位置および方向は、ある形の穿孔パターンを表す補強パターンにて決めることができる。補強穿孔穴24は扇形に穿孔してもよく、これによってトンネルの壁23および天井22の両方に穿孔穴ができる。または、補強穿孔穴24を天井22にのみ扇状に穿孔して、頭上ビームを設けてもよい。補強パターンは、トンネル線Lに対して横断方向、一般には垂直方向であるxz方向に向いた平面を決め、これに補強穿孔穴24の開始位置11bを配置する。したがって、補強穴24の方向はトンネル線Lに対して横断方向になる。しかし、穿孔ブーム5は、穿孔ユニット6を補強穴24の開始位置11b内に上方に、横方向に、または、ときには下方にさえ向けて配置できるように構成されている。
【0032】
掘削穿孔穴21を穿孔する場合、操作者14は制御装置15を切羽穿孔モードに接続し、また、その穿孔ユニット6を使用して補強穿孔穴24を穿孔する場合、操作者14は補強モードを選択する。これらのモードによって、制御装置16が操作者14の手動操作に応じて穿孔ユニット5の実際の位置決め動作を行なうやり方に影響を与えることができる。操作部材15はジョイスティックでよく、これを所定の方向に倒すと、補強モードでは切羽穿孔モードと異なる動作を穿孔ユニット6に行なわせることができる。
【0033】
制御システムはさらに、ディスプレイ装置25を有してもよく、これによって穿孔パターンおよび被穿孔穴に対する穿孔ユニット6の位置を示すことができる。操作者14は、図8および図9に関連して以下に説明するように、ディスプレイ装置25から得られた情報に基づいて手動操作を行なうことができる。
【0034】
図2の目的は、トンネル2内で行なわれる穿孔をさらに説明するものである。掘削穿孔穴21をトンネルの切羽において実質的にトンネル線Lの方向に穿孔して円形部12を掘削してもよい。同図はまた、補強穿孔穴24によって形成されトンネル線Lに対して横断方向に位置する穿孔穴扇形部26も示している。このような複数の扇形部26は、これらがトンネル線Lの方向から見て互いに所定の距離で離間するように穿孔してもよい。切羽3の穿孔および扇形26の穿孔は別々の段階として行なってもよく、その場合、削岩リグ1は各段階ごとに別個に位置決めおよびナビゲートされる。または、切羽3の穿孔および扇形26の穿孔の両方を同じ位置決めおよびナビゲーションを使用して削岩リグで行なってもよい。ときには、岩盤の固さが弱く、新たな円形部を穿孔できる前に岩盤を補強する必要がある。
【0035】
図3は、穿孔ユニットを位置決めする際の制御システムの作動原理を説明するフローチャートを示す。操作者は、ディスプレイ装置において穿孔ユニットの位置および被穿孔穴の開始場所を見つけ、次いで、操作部材、例えばジョイスティックを傾けて操作を行なう。制御装置は操作部材から操作信号を受けて、これを穿孔ユニット位置の変化率に変換する。この後、制御装置は、穿孔ユニットの目標位置を操作者の望む方向に動かし、ブームの継手角度を計算して目標位置を達成する。さらに、制御装置は、アクチュエータの目標値を設定して新たな目標角に一致させ、これによって穿孔ユニットの位置および角度が操作部材の値に従った速度で変わる。
【0036】
図4は、切羽穿孔に用いられる座標系と方向角uおよびyを示す。穴の方向27も同図に示す。次いで、図5は扇形穿孔モードにおいて使用される座標系を示す。見て分かるように、切羽穿孔および扇形穿孔には直交座標を使用してもよく、その各軸は同じにして決めてよい。しかし、方向角の定義は互いに異なっている。工具の方向は図5に参照番号28で示す。
【0037】
図5はさらにジョイスティック29を示すが、これは前後および両側に動かすことができる。制御を補強モードに接続してジョイスティック29を前方に、すなわち操作者14から離れる方向に押すと、穿孔ユニットおよびその中の工具は、被穿孔補強穴がトンネルの切羽の方へ角度θ2で斜めに向くよう回動する。ジョイスティック29を操作者14の方へ引くと、工具は、被穿孔補強穴がトンネルの切羽から離れて斜めに向くよう方向付けられる。円錐頂角θ2は、ジョイスティック29が前方に押し出されると正の値に到達し、ジョイスティック29が後方に引かれると負の値に到達する。穿孔ユニットは、xz平面上でジョイスティック29を右へ動かすことで時計回りに回動させることができ、これによって、回転角θ1は正の値を得、被穿孔穴は右へ方向付けられる。ジョイスティック29を左に倒すと、穿孔ユニットは反時計回りに回動し、回転角θ1は負の値を得、これによって被穿孔穴は左へ方向付けられる。
【0038】
図6は補強モードにおける直感的操作原理を示す。操作者14は、ジョイスティックとは、穿孔ユニットを移動させる新たな目標位置を制御装置に与えたいときに動かす穿孔工具10であるかのように、イメージすることができる。例えば、操作者は、穿孔ユニットおよびその中の工具を回転角θ1の方向に回動させたい場合、操作部材を左もしくは右に回す。さらに、被穿孔穴を前方斜めに向けたい場合、操作者はジョイスティックを前方へ押し、また同様に、被穿孔穴を後方斜めに向けたい場合、ジョイスティックを後方へ引く。操作者14が操作部材の動きの影響を直ちに理解するのは容易である。同様の直感的操作原理をプロダクション削岩リグの制御システム内に配設して、掘削穴の扇状パターンとしての穿孔を容易化することができる。
【0039】
図7は、2つのジョイスティック15aおよび15bによる穿孔ユニット6の手動位置決めを示す。同図はジョイスティックを操作する方向を矢印で示し、この矢印に関連して、穿孔ユニット6の位置および方向に対する操作の効果を示す。操作中にスイッチ30が選択された時の操作方向の効果を括弧内に示す。別の機能をスイッチ30で選択することができる。同図で分かるように、ジョイスティック15a、15bの操作方向は、穿孔ユニット6の実際の運動方向に対して理論的に関連している。掘削モードが選択されると、動きの制御に違いがでてくる。スイッチ30が選択された場合、左側のジョイスティック15aを前方または後方に動かすと、掘削モードでは工具によって示す方向に穿孔ユニット6が動く。さらに、右側のジョイスティック15bを横方向に動かすと角度uが変化し、前後に動かすと角度vが変化する。
【0040】
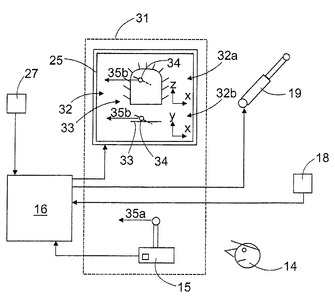
図8はさらに、削岩リグの制御装置16のユーザインタフェース31およびその接続を示す。ユーザインタフェース31はディスプレイパネルなどの1台以上のディスプレイ装置25と、ジョイスティックなどの1つ以上の操作部材15とを有している。ユーザインタフェース31によって操作者14は、制御装置16およびそのプログラムと作動原理を利用して、穿孔ユニットで所望のように作業することができる。
【0041】
ディスプレイ装置25は、被穿孔扇形部の扇形パターンを示すのに使用してもよい。補強穴を穿孔する場合は、補強パターンを制御装置16にロードし、また扇状プロダクション穴を穿孔する場合は、掘削パターンを制御装置16にロードする。ディスプレイ装置25の表示画面32は、穿孔扇形平面33および穿孔ユニットの記号34を別々の方向から見て表示する2つ以上の分割画面を含んでよい。したがって操作者14は、表示画面32で位置決め状況を見て、操作部材15によって制御指令を制御装置16に与えることができ、そこで制御装置は、1つ以上のアクチュエータを制御して、制御指令に応じた穿孔ユニットの位置もしくは方向の変化を物理的に実現する。操作者14は、個々のアクチュエータ19を制御するのではなく、制御装置に対して目標位置もしくは方向、すなわち目標位置を与え、これが制御装置により実現される。操作部材15の1つの操作方向を拘束して、ディスプレイ装置25に表示された1つの方向に対して穿孔ユニットを制御する。穿孔ユニットの位置および方向は、1つ以上のセンサ18もしくは同様の測定装置によって判定され、その測定情報を制御装置16へ送る。
【0042】
図8はさらに、操作部材15を動かす効果も表示画面32に示す。操作部材15の操作方向は、操作部材15を左へ矢印35aの方向に動かすと、これに応じて表示画面32内の記号34が矢印35bで示すように左へ動くよう、直感的に決めることができる。したがって、操作部材15のこの動きはx座標のみ値を変えるが、残りの座標、すなわちyおよびzと方向角は変化しない。
【0043】
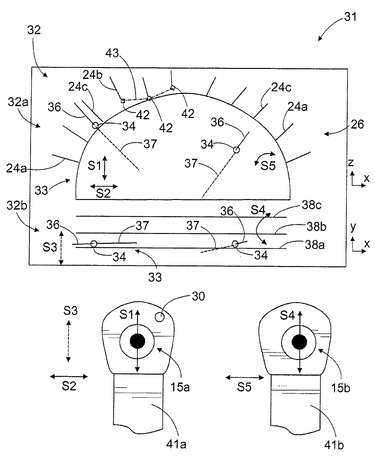
図9は、上下に配された2つの分割画面33aおよび33bを有する表示画面32を模式的に示す。第1の分割画面32aはy方向から見た穿孔扇形部26を示し、第2の分割画面32bは同じ穿孔扇形部26をz方向から見て示している。したがって穿孔扇形部26のxz平面は、両分割画面で扇形平面を形成している。第1の分割画面32aは、xz平面上での穿孔穴24の位置および方向と穿孔ユニット6の位置を示している。計画した穿孔穴24aは、穿孔パターンのプロファイルから延びる線として示してもよい。穿孔済みの穴24bは、施工した位置に四角形などのマークを用いて開始点を示してもよい。穿孔すべき計画穿孔穴24cを次に肉太で示してもよい。第2の分割画面32bは奥行き図として用いてもよい。換言すれば、穿孔ユニット6の位置は、画面内で扇形平面、すなわち穿孔扇形部のxz平面に対するものとして見ることができる。穿孔ユニット6は、表示画面32において適切な記号で示してもよい。図9では、穿孔ユニット6の記号34は丸印であり、そこから実線36が延び、この線は、穿孔ユニット6の現在位置および方向に穿孔を開始したとすれば形成されるであろう仮想穿孔穴を示す。さらに、表示画面32は送りビームを破線37で示してもよく、これに基づいて操作者は穿孔に必要なスペースにアクセスできる。上述の記号34と関連の穴線36および送りビームの線37に代わって、他の適した記号および表示方式を使用してもよい。第2の分割画面32bでは、円錐頂角の値を数値として表示することができる。さらに、第2の分割画面32bは、第1の分割画面32aに対応する扇形平面を横線38aとして示してもよい。穿孔パターンが補強パターンである場合、そのパターンに含まれる可能性のある他の補強扇形部の扇形平面も、横線38bおよび38cとして示してよい。図9による表示画面32は、分割画面32aおよび32bが垂直方向に上下に配されているが、これは明瞭で図式的であり、これによって操作者の作業が容易になる。
【0044】
図9における図形表示画面32のような画面は、操作者の作業を容易にする視覚ツールであり、補強扇形部およびプロダクション扇形部を穿孔するのに適用することができる。例えば、表示画面32のように、穿孔ユニットの記号34が被穿孔穴の開始点より下にある場合、操作部材34により記号34を真上に動かし、これによって制御装置は、他の座標もしくは方向角を何ら変えることなしに穿孔ユニットをz方向に動かす。同様に、見掛けは正確でないが穿孔ユニット記号34をすぐ左へ動かす必要があることが表示画面から明らかになれば、操作者は、操作部材によってその記号をx方向へ動かす。すなわち、穿孔ユニットに新たな目標位置を与える。操作部材は穿孔ユニットの物理的動きを案内するが、その場合、穿孔ユニットのx座標のみが変わり、残りの座標および方向角は変わらない。記号34の穴線37と穿孔パターンにて決定された穿孔穴を示す線24cが両分割画面32aおよび32bで重なっていれば、穿孔ユニットは正しく位置決めされ方向付けられている。
【0045】
図9はさらに、表示画面32の下方に、ユーザインタフェース31に含まれる操作部材15aおよび15bを上から見た状態で示す。操作部材はジョイスティックでよく、これは、操作席に関連して、例えば制御盤41a、41bに取り付けてもよい。同図は、ジョイスティック15aの動きを矢印S1およびS2で示し、穿孔ユニットが表示画面内で動く様子を示している。スイッチ30を選択すると、同図の分割画面32bに矢印S3で示すように穿孔ユニットのy座標に影響を与えることができる。右側のジョイスティック15bを使えば、矢印S4およびS5で示すように方向角に影響を与えることができる。
【0046】
図9はまた、施工した穴24bの開始点、すなわち、いわゆる岩盤識別点42も表示画面32内に表示することができることを示す。岩盤識別点42に関する情報は、制御装置に記憶し処理してもよい。さらに、表示画面32は岩盤識別点42を通る図形43を示してもよい。これは、観察下にある扇形部の1点に岩盤表層が実際に位置する箇所を示す。実際の岩盤表層に関する情報を記憶し、これを処理して削岩リグ内もしくは外部で利用してもよい。
【0047】
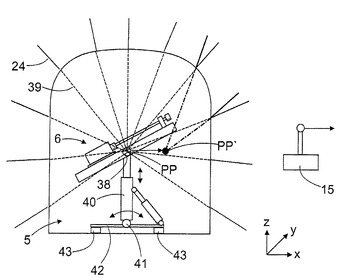
図10はプロダクション削岩リグに使用されるブーム5を示し、穿孔ユニット6はスイベルジョイント38によりブーム上に配設されて、穿孔ユニット6がトンネル線に対して横断方向に回動できるようになっている。スイベルジョイント38の1点には、いわゆる枢軸点PPがあり、これには穿孔穴24の仮想延長線39が通っている。ブーム5は伸縮可能な垂直アーム40を含んでよく、その下端部は継手41によりブームの水平ビーム42に連結してよい。ビームは、さらに枝様のブーム部43で支持し、ブーム部は地面に支持してよい。枢軸点PPはz方向、すなわち上方もしくは下方に、また横方向に動くことができる。枢軸点PPのx方向における水平の動きは、垂直アーム40の回動と長さの変化の複合効果によって達成することができる。垂直アーム40と水平ビーム42との間には線形ガイドを配設することもでき、これによって横の動きが可能になる。枢軸点PPの扇形平面33上の位置は、操作部材15によって制御指令を制御装置に与えることで変えることができる。操作部材15を1つの方向に動かすと、1つの座標に対する枢軸点PPの動きが形成される。これを同図に示す。操作部材15を同図における右方へ動かすと、枢軸点の目標位置も、矢印で示すようにx座標の方向における右方へ動く。制御装置は、継手制御装置の目標値を決めて、枢軸点の位置に影響を与えるアクチュエータを制御し、操作者の与えた目標値が達成されるようにする。枢軸点PP'が正しい位置をとると、扇形部の穿孔を開始することができ、穿孔ユニットは、穿孔パターンにて決められた穿孔穴の方向にこれを回すことによって枢軸点の周囲に位置決めされる。
【0048】
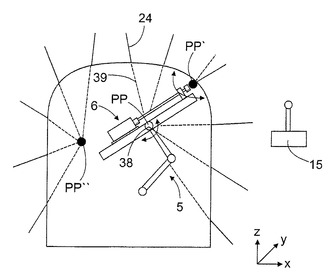
図11はプロダクション穿孔に適用可能な第2の構造を示し、これは、1つ以上のブーム部品から成る穿孔ブーム5の最外端部にスイベルジョイント38を有し、これを中心として穿孔ユニット6は扇形平面上で回動することができる。したがって、扇形平面上の枢軸点PPは上記ジョイントの位置に位置することができる。枢軸点PPの位置は上述のように動かすことができる。さらに、図10および図11の両方の方式では、穿孔ユニットの中心部に位置するジョイント以外の他の場所に枢軸点の位置を決めることができる。そこで、枢軸点PP'の新たな位置は、例えばドリルビットの前端部になるように決めてもよい。さらに、枢軸点PP"の扇形平面上の位置は、穿孔ブームおよび穿孔ユニットの構体とは別であってもよく、その場合、扇形平面上のいずれの位置に位置決めしてもよい。制御装置は、枢軸点の位置を考慮して、必要な位置決めの動きを決める。枢軸点PPの位置は、操作部材によって上述のように動かすことができ、ディスプレイ装置に示される表示画面を補助的に使用することができる。穿孔の際、決定した新たな枢軸点PP'もしくはPP"に対して扇形平面上で穿孔ユニット6の回動を行なう。
【0049】
図12は、扇形穿孔を削岩リグ1で行なう状態を非常に簡略化して示し、そのキャリア4は穿孔扇形平面33に対して斜めの位置へ移動されている。穿孔開始前に削岩リグ1はナビゲートされ、これによってトンネル2内におけるその位置と穿孔パターンの位置が分かる。ナビゲーションによって、削岩リグの穿孔パターンで決められた扇形平面33に対する位置を見出すことができる。制御装置は、穿孔ユニットの位置決めおよび制御の際に削岩リグ1の位置誤差を考慮に入れる。
【0050】
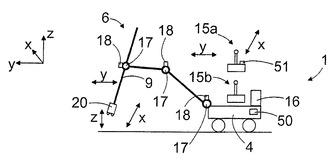
図13および図14は表層掘削用の削岩リグ1を示すが、これは、本願で先に説明した削岩リグの基本構造、制御原理および特徴を含むものであってもよい。表層削岩リグ1は、岩盤に掘削穴21を下方にもしくは斜め下方に向けて穿孔するのに用いてもよい。図16は、表層掘削の1つの適用例であるベンチ穿孔55の原理を示す。表層掘削では、キャリア4の1つの位置決め位置から岩盤に複数の穿孔穴を穿孔することができる。穿孔穴パターンを事前に設計しておいてもよい。穿孔ユニット6の位置決めには、本願に記載の穿孔モードを利用してもよく、その場合、操作者は、穿孔の目標位置および方向を制御装置に与え、その後、制御装置16は、要求されたブームの動きをアクチュエータの制御によって行なう。この制御は図3に示すチャートによってもよい。さらに、制御システムは直感的接続を有し、これは、操作部材により行なわれる動きが穿孔ユニット6の位置および方向に与える効果を操作者に理解させる助けとなる。図13ないし図15bは、操作部材15a、15bの操作がドリルビット20の位置および送りビーム9の方向に与える効果を示す。制御装置16はキャリア4の位置を考慮に入れて、これは、例えば傾斜計50により判定することができる。さらに、ジョイント17に関連して、もしくは目的に適った他の位置に、センサ18もしくは測定装置を配し、制御装置16は、これらから得たデータによりドリルビット20の位置および方向を決めるが、ドリルビットの方向は送りビーム9の方向と同じである。表層掘削の制御システムは一般に、削岩リグ自体の座標系を利用する。操作部材15aに関連してスイッチ51もしくは同様のものがあってもよく、これによってドリルビット20はz方向に動く。ドリルビット20を1つの座標の方向、例えばz方向へ移動させても、残りの座標xおよびyは不変であり、方向角uおよびvも不変である。これは座標制御の原理によるものである。
【0051】
場合によって、本願に記載の各構成要素は他の構成要素に無関係に用いてもよい。他方、本願に記載の各構成要件は、必要な場合、組み合わせてさまざまな組合せを形成してもよい。
【0052】
図面および関連説明は本発明の概念の説明のみを意図している。本発明の細部は特許請求の範囲内で変化させてもよい。
【発明の背景】
【0001】
本発明は、1本以上の穿孔ブームを備えた可動キャリアを含む削岩リグに関するものである。穿孔ブームには、岩盤に穿孔穴を穿孔する削岩機を含む穿孔ユニットが設けられている。削岩リグは穿孔穴を所望のパターンとして穿孔するのに用いることができる。
【0002】
さらに本発明は、削岩リグを用いてドリル穴を所望の穿孔パターンとして穿孔する削岩方法および削岩用の制御システムに関するものである。
【0003】
本発明の分野は、本願の独立請求項の前提部においてより詳細に明らかになる。
【0004】
岩盤を円形に穿孔することがある。その場合まず、穿孔穴を岩盤に穿孔し、その後、穿孔穴に装薬して発破する。種々のトンネル、地下倉庫ホール、貯蔵施設、駐車場または他の同様な岩盤洞穴を掘削によって岩盤内に形成できる。しかし、このような岩盤洞穴が掘削される岩盤が常に、そのままで十分に堅く、均一で、安定しているわけではない。また、円形部を発破することにより、岩盤洞穴を形成する岩盤を破壊したり、そうでなくても弱くなったりして、掘削後に岩盤の堅さが不十分となる場合がある。したがって、岩盤洞穴の天井および壁、ときには床も、補強しなければならないことは、むしろ通常のことである。補強は、複数の補強穴を岩盤に穿孔し、そこに岩盤ボルト、ケーブルまたは同様の補強部材もしくは補強材料を入れることで行なうことができる。補強穴は通常、トンネル線に対して横断する向きになるように扇状パターンとして穿孔される。扇状穿孔において、穿孔ユニットはトンネルに対して横断する向きに配置される。穿孔穴は、補強穴のためばかりでなく、いわゆるプロダクション削岩リグによって掘削穴をプロダクショントンネルの壁および天井に穿孔する場合も、扇状に穿孔される。扇形穿孔穴の穿孔において見られる1つの問題は、穿孔ユニットの位置決め動作により通常、他の位置決め方向も変更する必要が生ずることである。したがって、ドリルブームを動かし穿孔ユニットを位置決めすることは、操作者にとって難しいと見られていた。
【発明の簡単な説明】
【0005】
本発明は、穿孔穴を穿孔穴パターンとして穿孔する新規で改善された削岩リグ、ならびに岩盤穿孔の方法および制御システムを提供することを目的とする。
【0006】
本発明による削岩リグは以下の点を特徴とする。すなわち、制御装置は少なくとも1つの穿孔モードを含み、このモードにおいて、操作部材のそれぞれ個々の操作方向は、穿孔パターンにて決められた1つの座標もしくは方向角についてのみ穿孔ユニットの物理的位置決め動作を生成するように構成され、他の座標および方向は不変を維持し、操作部材の影響方向を穿孔モードにおいて選択し、穿孔ユニットの直感的運動方向に対応させ、これによって操作部材を1つの操作方向に動かして削岩ユニットの実際の動きを操作部材の動きに対応した方向に生成することである。
【0007】
本発明による方法は以下の点を特徴とする。すなわち、手操作部材のそれぞれ個々の操作方向を関連付けて、1つの座標もしくは方向角についてのみ削岩ユニットの位置に影響を与え、目標位置および操作部材を動かす場合は直感的接続を用い、これによって穿孔ユニットおよび操作部材の実際の動きの方向を互いに一致させることである。
【0008】
本発明による制御システムは以下の点を特徴とする。すなわち、制御システムは少なくとも1つの穿孔モードを含み、このモードでは、操作部材のそれぞれ個々の操作方向を拘束して穿孔ユニットを1つの座標もしくは方向角に制御し、操作部材の操作方向を穿孔モードにおいて選択して、制御装置の直感的運動方向に対応させることである。
【0009】
一概念によれば、削岩リグの制御システムは1つ以上の穿孔モードを含み、穿孔すべき穿孔穴の開始点に手動で穿孔ユニットを操作者の操作の下に位置決めする。穿孔ユニットは操作部材の動きに対応して動く。手動操作部材を動かすことによって、穿孔ユニットの位置および方向に制御システムが影響を与えるように構成され、これにより操作部材が個々のアクチュエータもしくは継手を何ら直接制御することはない。制御システムは、ブームの継手について目標位置を決め、穿孔ユニットの位置決めに影響を与えるアクチュエータをそれに応じて制御する。穿孔モードに接続されると、手操作部材を動かすことで穿孔ユニットを1つの座標もしくは方向角に対する位置決め動作を生ずる。残りの座標および方向は不変に維持される。さらに、操作部材の操作方向を各穿孔モードごとに選択し、穿孔ユニットの直感的運動方向に対応させる。
【0010】
1つの利点は、穿孔モードを手動位置決めに使用する場合、削岩リグは従前より効率的に使用できることである。操作者は、操作部材によって穿孔ユニットに新たな目標位置を指示し、制御システムは要求された動作に応え、これによって操作者の示した目標を実際に達成する。操作者は、ブームの継手もしくは動力学を考える必要なく穿孔ユニットの所望の動きを達成し、制御システムに穿孔ユニットの目標位置を与えることにのみ専念することができる。これに従って、制御システムは要求された動きを自動的に行なう。操作者は、穿孔ユニットを例えば一度に1つの座標方向および方向角ずつ位置決めすることができる。穿孔ユニットの目標を動かしても、その時に操作部材により影響を受けない座標および方向は、不変に維持される。扇形穿孔モードにおいて、例えば操作者は、誤って穿孔ユニットを扇形平面の外に位置決めすることなく、穿孔する扇形平面上に穿孔ユニットを位置決めすることができる。これによって操作者の精神的負担が軽減され、操作が促進される。操作部材の操作方向を各穿孔モードごとに選択して穿孔ユニットの直感的運動方向に対応させることによって、操作はさらに実質的に容易になり、促進される。したがって、操作者は、選択した操作方向に操作部材を動かせばどの方向に穿孔ユニットが動くかを常時、知ることが容易になる。直感的制御であるため、操作者は削岩機の制御システムの経験をほとんど必要としない。
【0011】
一実施例に概念によれば、トンネル切羽における掘削穿孔穴の穿孔と補強扇形部の穿孔の両方に同じ削岩リグを使用する。
【0012】
一実施例の概念によれば、制御モードにおいて穿孔ユニットを動かしてそのモードによって決まる穿孔方向に自然になるように構成する。扇形穿孔モードでは、例えば、穿孔ユニットを動かして穿孔を上方および横方向に自然に向くようにする。手操作部材の影響を生ずる方向を選択して穿孔ユニットの論理的運動方向に一致させ、これによって操作部材を1つの操作方向に動かして穿孔ユニットの実際の動きを操作部材の操作方向に生成する。こうして、制御装置に直感的行動が達成され、これによって操作者の作業がかなり容易になる。
【0013】
一実施例の概念によれば、手動操作部材は、前方および後方と両側すなわち左右の操作運動を有するジョイスティックである。さらに、上述の操作運動中に補助スイッチによって他の機能を選択すると制御指令の数が2倍もしくは複数倍になるものでもよい。一般に、穿孔ブームとその穿孔ユニットを制御するこのような2本のジョイスティックがある。操作者は、ディスプレイ装置にて、例えば特定の場合ごとにどのブームおよび穿孔ユニットを制御すべきか、ジョイスティックで選択することができる。
【0014】
一実施例の概念によれば、切羽および補強孔の穿孔を意図した削岩リグは2本以上のブームを有し、そのそれぞれに穿孔ユニットが設けられている。この削岩リグを使用すれば、岩盤洞穴の切羽において掘削穿孔穴を1つ以上の穿孔ユニットで穿孔し、これと同時に1つ以上の穿孔ユニットで扇形補強穴を穿孔することができる。したがって、1つの位置の削岩リグで同時に2つの作業工程を賄うことができ、これによって、削岩リグを個々に位置決めしナビゲートして補強穴を穿孔する必要がないので、時間の節約になる。
【0015】
一実施例の概念によれば、削岩リグはプロダクション削岩リグであり、これは、トンネルもしくは同様の岩盤洞穴の天井および壁に掘削穴を穿孔パターンとして穿孔できる。被穿孔穴の数、場所、寸法、奥行きおよび方向と、穿孔に必要な他の情報は、穿孔パターンにおいて決めてよい。
【0016】
一実施例の概念では、穿孔ユニットは扇形穿孔リグであり、これは、削岩リグが穿孔扇形面上で回動可能であり、穿孔扇形部における被穿孔穴を回転角の方向に向けることができる。穿孔ユニットの回動はいわゆる枢軸点に対して行なうことができ、その位置は操作者が穿孔扇形部平面上で決めることができる。
【0017】
一実施例の概念によれば、扇形穿孔リグにおいてドリルビットの前端部に枢軸点があるよう決め、これによって次の被穿孔穴の回転角を枢軸点に対して変えることができる。
【0018】
一実施例の概念によれば、扇形穿孔において穿孔扇形部のすべてもしくは複数の穿孔穴の中心軸の仮想延長線が1つの枢軸点を通過するようにこれらの穿孔穴を方向付けることができる。ここで、穿孔穴は削岩リグにより穿孔されるが、その場合、穿孔ユニットは穿孔扇形平面上で枢軸点を中心として回動する。扇形平面上の枢軸点の位置は操作部材によって移動させることができる。操作者は、新たな目標位置を枢軸点に与え、その後、制御装置はブーム継手に新しい目標値を決め、ブームに影響を与えるアクチュエータを制御して操作者の指示した目標位置へ枢軸点が移動するようにする。1つの座標方向における操作部材の動きを拘束して、扇形平面上で1つの座標についてのみ枢軸点を移動させる。操作部材をx方向に動かすと、枢軸点も同様にx方向に移動し、また操作部材をz方向に動かすと、枢軸点はz方向に移動する。操作部材の操作方向は、枢軸点の実際の動きの方向について操作部材が直感的動作をとるように構成することができる。
【0019】
一実施例の概念によれば、削岩リグの制御装置のユーザインタフェースは少なくとも1つのディスプレイ装置を含み、ディスプレイ装置は、表示画面を表示して手動位置決めを容易にすることができる。この表示画面は、穿孔パターンにて決定された穿孔ユニットの位置および穿孔穴の場所を操作者に示す視覚ツールである。手動操作部材の操作方向は表示画面に示される方向に拘束される。したがって、手動操作部材の1つの操作方向は、表示画面に示された1つの方向に穿孔ユニットの目標位置を制御するように構成されている。
【0020】
一実施例の概念によれば、ディスプレイ装置は、互いに異なる画像を有する少なくとも2つの分割画面を含む表示画面を提示する。すなわち、各分割画面において見る方向が異なるものである。分割画面は、被穿孔穴の開始点を位置決めするxz方向の扇形平面に対して決定された穿孔ユニットの位置および方向を表示することができる。分割画面は表示画面において同時にアクティブである。したがってディスプレイ装置は、穿孔ユニットの位置決めに関するすべての必要情報を単一の表示画面に同時に表示する。第1の分割画面は、トンネル線の方向の扇形平面のxz画像でよい。すなわち、扇形平面をy方向から見ている。第2の分割画面は、扇形平面を上から、すなわちz軸の方向から見た同じ扇形平面のxy面の方向における画像でよい。したがって第1の分割画面は、扇形平面の方向における穿孔ユニットの位置を示し、第2の分割画面は、奥行きの方向における穿孔ユニットの位置を示す。これにより操作者は、単一の表示画面において穿孔ユニットの位置決めに影響を与えるすべての座標方向を同時に見ることができる。さらに、第1の分割画面および第2の分割画面は、表示画面においてディスプレイ装置の垂直方向に上下に同時に表示することができる。さらに、垂直方向に上下に配置された分割画面には、穿孔ユニットを示す記号を横方向から見て同じ場所に表示することができる。このような表示画面はとくに図式的であり、状況の明瞭なイメージを操作者に提供する。この適用例は、扇形穿孔ばかりでなく、例えばベンチ穿孔などの表面穿孔にも利用することができる。
【0021】
一実施例の概念によれば、先ず扇形穿孔において穿孔扇形平面の場所を決め、穿孔ユニットをその穿孔扇形平面上に位置決めする。次いで、穿孔ユニットをその扇形平面上に保ち、穿孔ユニットの位置がy座標の方向で変わることなく以降の位置決めもしくは照準工程を行なう。ここで、目標位置は、穿孔扇形平面に影響を及ぼすことなく操作部材によって穿孔扇形平面の方向に動く。扇形平面上での穿孔ユニットの位置決めは位置決めの第1段階、すなわち粗い位置決めと考えてよく、また、扇形平面上での移動は第2の位置決め、すなわち細かい位置決めと考えてよい。
【0022】
一実施例の概念によれば、先ず扇形穿孔において穿孔扇形の場所を決定し、穿孔ユニットをその穿孔扇形平面上に位置決めする。次いで、制御装置に指令を出して穿孔ユニットの移動をロックし、穿孔ユニットは、次に行なわれる位置決め動作中、扇形平面上の位置を保つ。このようにして、操作者が誤って穿孔ユニットをy座標の方向に扇形平面から離れるように動かす状況が回避される。
【0023】
一実施例の概念によれば、穿孔扇形平面に対する扇形穿孔リグのキャリアの位置決め誤差は制御装置で考慮する。したがって、削岩リグを穿孔扇形平面に対して垂直に位置決めする必要はなく、削岩リグを扇形平面に対して斜めの位置に保ってもよい。キャリアの位置誤差はナビゲーションに関連して判定され、これによって制御装置は、位置誤差を考慮に入れて穿孔ユニットを穿孔パターンにおける決められた方向に案内する。
【0024】
一実施例の概念によれば、削岩リグは表層掘削リグである。表層掘削リグにより、例えばベンチ穿孔を行なう場合、所望の穿孔穴パターンが穿孔される。穿孔穴パターンは複数の穿孔穴を含み、これらは一般に、所望の角度で下方へ、もしくは斜め下方へ向けられている。このような穿孔穴パターンに対して穿孔パターンを事前に設計し、例えば穿孔穴の数、開始点の位置、穿孔穴の奥行き、ならびに方向を決めることができる。穿孔パターンは、削岩リグの制御装置に入力することができ、本願に記載の方式で操作者に提示することができる。操作者はまた、穿孔パターン、もしくは個々の穴の位置および方向と各穴に関する他の情報とを自身で決めてもよく、さらに各穴の穿孔に際し、本願で上述したように補助手段として制御装置のディスプレイ装置を方向付けおよび位置決めに利用してもよい。さらに、表層掘削リグには、本願に記載した種類の穿孔モードが設けられ、穿孔モードでは、穿孔ユニットは操作者の手動操作で被穿孔穴の開始点に位置決めすることができる。削岩ユニットは操作部材の動きに応じて動く。手動操作部材を動かすと、穿孔ユニットの位置および方向が制御システムにより影響を受けるように構成され、このため操作部材が個々のアクチュエータもしくは継手を直接制御することはない。制御システムはブーム継手の目標位置を決定し、穿孔ユニットの位置決めに影響を与えるアクチュエータをそれに応じて制御する。穿孔モードがオンの場合、手動操作部材を1つの方向に動かせば、1つの座標もしくは方向角に対する穿孔ユニットの位置決め動作が発生する。残りの座標および方向は変化しない。これは、いわゆる座標制御である。さらに、表層掘削モードにおいて操作部材の操作方向を選択し、穿孔ユニットの直感的運動方向に一致させる。
【0025】
一実施例の概念によれば、削岩リグは表層掘削リグであり、その制御システムはジョイスティックなどの2つの操作部材を含む。第1のジョイスティックは、ドリルビットの位置を直交座標系におけるx-y平面上で制御するのに用いられる。この位置は、例えば一回に1座標ずつ変更することができる。ドリルビットの高さ位置、すなわちz座標は、例えば押しボタンによって変更してもよい。第2のジョイスティックは、実質的に垂直に向けられた送りビームを前後に傾斜させたり、また削岩リグの横方向に傾斜させたりする制御に用いられる。送りビームを傾斜させても、ドリルビットの位置は変わらない。表層掘削モードであるため、第1の操作部材を1つの方向に動かすことによって1つの座標に対するドリルビットの位置決め動作が発生するが、残りの座標は変わらない。第2の操作部材を1つの操作方向に動かすことによって、表層掘削モードでは、ドリルビットの位置もしくは他の方向角に影響を及ぼすことなく送りビームの1つの方向角に変化が生ずる。さらに、操作部材により生ずる実際の制御動作の変化率が操作部材の傾斜度に直接比例するように構成してもよい。
【0026】
一実施例の概念によれば、削岩リグは表層掘削リグであり、その制御システムは、制御に際して、鉱山の座標系やプロジェクト座標系に代えて、削岩リグについてリグ固有の別の座標系を利用する。削岩リグのキャリアの傾きは1つ以上のセンサもしくは測定装置によって判定する。同様に、ブームの全継手角度もセンサもしくは測定装置によって判定する。したがって制御システムは、ドリルビットの前端部の正確な位置および送りビームの傾斜を連続的に計算することができる。制御装置は、操作者の手動制御指令を考慮に入れて必要なアクチュエータを制御し、操作者により示されたドリルビットの目標位置および方向を自動的に実現する。したがって、位置決めの際に操作者が個々のアクチュエータを操作するのではなく、制御装置が座標制御を自動的に行なう。
【図面の簡単な説明】
【0027】
本発明のいくつかの実施例を添付図面にて、より詳細に説明する。
【図1】岩盤穿孔ユニットがトンネル線の方向に穿孔穴を穿孔し、またトンネル線に対して横断方向に穿孔穴を穿孔することが可能な削岩リグを示す模式的側面図である。
【図2】トンネル切羽内に配置された穿孔パターンおよびトンネルの掘削された部分に配置されたボルト打設パターンを示す斜視図である。
【図3】制御システムの機能を示す模式的フローチャートである。
【図4】掘削穿孔穴の穿孔において用いられるx、y、z直交座標系と方向角uおよびvを示す模式図である。
【図5】操作部材と、x、y、z直交座標系と、扇形を穿孔する際に用いられる方向角θ1およびθ2とを示す模式図である。
【図6】操作の直感的動作原理を非常に簡略化して示す模式図である。
【図7】補強モードにおける穿孔ユニットの位置決め作業を示す模式図である。
【図8】扇形穿孔を意図した削岩リグのユーザインタフェースおよびその接続を示す模式図である。
【図9】ディスプレイ装置に表示され上下に配置された2つの分割画面を有する表示画面の模式図であり、観察中の穿孔扇形部の平面および穿孔ユニットが2つの異なる画像で示されている。
【図10】プロダクション掘削リグの扇形穿孔ユニットを示す図である。
【図11】第2のプロダクション掘削リグの扇形穿孔ユニットをトンネル線の方向から見た模式図である。
【図12】扇形平面に対して斜めの位置に配置された削岩リグの模式的上面図である。
【図13】表層掘削モードにおける表層削岩リグの前面とその送りビームのリグの横方向における傾斜を示す模式図である。
【図14】表層穿孔モードにおける表層掘削リグの側面とその送りビームの前後方向における傾斜を示す模式図である
【図15a】穿孔モードにおいてドリルビットを座標制御により先ずx-y平面上に、次いで上方向、すなわちz方向に位置決めすることを示す模式的側面図である。
【図15b】穿孔モードにおいて座標制御により送りビームを方向付け、これによって方向付け中はドリルビットの位置が変わらないことを示す模式的側面図であり。
【図16】表層掘削の適用の一対象であるベンチ穿孔の原理を示す模式図である。
【0028】
明瞭にするため、本発明の実施例を簡略化して示す。各図において同様の部分は同じ参照番号で示す。
【発明のいくつかの実施例の詳細な説明】
【0029】
図1は、トンネルもしくは同様の岩盤洞穴の切羽3においてナビゲートされる削岩リグ1を示す。削岩リグ1は、1本以上の穿孔ブーム5を備えた可動キャリア4を有し、各ブームはそれぞれ、その最外端部に岩盤穿孔ユニット6を有している。岩盤穿孔ユニット6は削岩機7を有し、これは、送り装置8によって動いて、送りビーム9によって案内することができる。削岩機7は、削岩機に取り付けた工具10に対して衝撃パルスを与える衝撃装置を有してもよい。さらに、削岩機7は工具10を回転させる回転装置を有してもよい。穿孔ユニット6は、ブーム5を動かすことによって所期の穿孔穴の開始位置11aに配置することができる。穿孔パターンを穿孔用にあらかじめ設計することができ、パターンは、被穿孔穴の開始位置、終了点、方向、長さおよび寸法を穿孔パターンの座標系により決めることができる。円形12の穿孔用およびロックボルト扇形部13用に別々に穿孔パターンを設計してもよい。削岩リグ1を穿孔場所へ移動させる場合、先ず削岩リグの座標系を作業現場の座標系に接続するナビゲーションを行なう。さらに、穿孔パターンの座標系は、削岩リグの座標系および作業現場の座標系、すなわち、いわゆるプロジェクト座標系に接続してもよい。
【0030】
まず穿孔パターンにより決められた開始位置および方向に穿孔ユニット6を位置決めした後、実際の穿孔サイクルを各穿孔穴に対して自動的に行なうことができる。穿孔ユニット6は手動で位置決めしてもよい。そこで操作者は、操作部材15により穿孔ユニット6に新しい目標位置を与え、これに基づいて制御システムは、ブーム5の各継手の目標位置および必要な動作を決定し、アクチュエータによって継手を新しい目標へ導く。制御システムは1台以上の制御装置16を有してよく、これは、ブームの物理的構造および現在位置に基づいて必要な動きを決定することができるコンピュータもしくはプロセッサでよい。ブーム5は、継手17aにより互いに接続された2つ以上のブーム部品5a、5bからなっていてもよい。さらに、ブーム5は継手17bによってキャリアに、また継手17cによって穿孔ユニット6に接続されている。穿孔ブーム5は、図1では明瞭にするため非常に簡略化したブームのみを示すが、多様に動かすことができる構造体である。継手17に関連して、センサ18もしくは同様の測定装置が配され、これらから得られた位置情報に基づいて制御装置16はブームの位置を判定することができる。ブーム5およびその各部は、アクチュエータによって動かすことができ、アクチュエータは、操作者14により指示された目標位置およびブーム5の位置情報に基づいて制御装置16により制御することができる。明瞭にするため、図1はセンサおよびアクチュエータを1つのみ示している。
【0031】
位置決めの際に、穿孔ユニット5の位置は、工具10の最外端部にあるドリルビット20の位置に基づいて観察することができる。なぜなら、ドリルビット20を被穿孔穴の開始位置11aへ導くのが目的だからである。方向は工具10の長手方向軸として観察することができる。図1において、穿孔ユニット5は、岩盤洞穴の切羽内の穿孔すべき掘削穿孔穴21の点に配置されている。トンネル2は、その切羽3において複数の掘削穿孔穴21を実質的にトンネル線Lの方向に穿孔することによって掘削され、各穴は穿孔後に装薬される。発破作業では、岩盤材料は円形部12の分だけ岩盤から取り除かれる。もちろん、掘削穿孔穴は、例えばいわゆる見張り角の分だけ幾分斜めに向けてもよい。切羽穿孔パターンにおける掘削穿孔穴21は、例えばプロファイル穴、フィールド穴およびカット穴を含む。掘削穴21の唯一の目的は、円形を所望の奥行長に形成し、計画通り妥当な大きさの破片として岩盤を剥離することを確実に行なうことである。円形部を発破すると、トンネルを画成する岩盤に損傷を与える可能性があり、または安全なトンネルを保証するには岩盤の固さが本来不十分である可能性がある。したがって、トンネル2の天井22および壁23を補強する必要があることがある。岩盤は、ロックボルトもしくは同様の補強材を打設可能な複数の隣接する補強穿孔穴24を所定のパターンに従って穿孔することによって、強化することができる。補強穿孔穴24の数、奥行き、直径、開始位置および方向は、ある形の穿孔パターンを表す補強パターンにて決めることができる。補強穿孔穴24は扇形に穿孔してもよく、これによってトンネルの壁23および天井22の両方に穿孔穴ができる。または、補強穿孔穴24を天井22にのみ扇状に穿孔して、頭上ビームを設けてもよい。補強パターンは、トンネル線Lに対して横断方向、一般には垂直方向であるxz方向に向いた平面を決め、これに補強穿孔穴24の開始位置11bを配置する。したがって、補強穴24の方向はトンネル線Lに対して横断方向になる。しかし、穿孔ブーム5は、穿孔ユニット6を補強穴24の開始位置11b内に上方に、横方向に、または、ときには下方にさえ向けて配置できるように構成されている。
【0032】
掘削穿孔穴21を穿孔する場合、操作者14は制御装置15を切羽穿孔モードに接続し、また、その穿孔ユニット6を使用して補強穿孔穴24を穿孔する場合、操作者14は補強モードを選択する。これらのモードによって、制御装置16が操作者14の手動操作に応じて穿孔ユニット5の実際の位置決め動作を行なうやり方に影響を与えることができる。操作部材15はジョイスティックでよく、これを所定の方向に倒すと、補強モードでは切羽穿孔モードと異なる動作を穿孔ユニット6に行なわせることができる。
【0033】
制御システムはさらに、ディスプレイ装置25を有してもよく、これによって穿孔パターンおよび被穿孔穴に対する穿孔ユニット6の位置を示すことができる。操作者14は、図8および図9に関連して以下に説明するように、ディスプレイ装置25から得られた情報に基づいて手動操作を行なうことができる。
【0034】
図2の目的は、トンネル2内で行なわれる穿孔をさらに説明するものである。掘削穿孔穴21をトンネルの切羽において実質的にトンネル線Lの方向に穿孔して円形部12を掘削してもよい。同図はまた、補強穿孔穴24によって形成されトンネル線Lに対して横断方向に位置する穿孔穴扇形部26も示している。このような複数の扇形部26は、これらがトンネル線Lの方向から見て互いに所定の距離で離間するように穿孔してもよい。切羽3の穿孔および扇形26の穿孔は別々の段階として行なってもよく、その場合、削岩リグ1は各段階ごとに別個に位置決めおよびナビゲートされる。または、切羽3の穿孔および扇形26の穿孔の両方を同じ位置決めおよびナビゲーションを使用して削岩リグで行なってもよい。ときには、岩盤の固さが弱く、新たな円形部を穿孔できる前に岩盤を補強する必要がある。
【0035】
図3は、穿孔ユニットを位置決めする際の制御システムの作動原理を説明するフローチャートを示す。操作者は、ディスプレイ装置において穿孔ユニットの位置および被穿孔穴の開始場所を見つけ、次いで、操作部材、例えばジョイスティックを傾けて操作を行なう。制御装置は操作部材から操作信号を受けて、これを穿孔ユニット位置の変化率に変換する。この後、制御装置は、穿孔ユニットの目標位置を操作者の望む方向に動かし、ブームの継手角度を計算して目標位置を達成する。さらに、制御装置は、アクチュエータの目標値を設定して新たな目標角に一致させ、これによって穿孔ユニットの位置および角度が操作部材の値に従った速度で変わる。
【0036】
図4は、切羽穿孔に用いられる座標系と方向角uおよびyを示す。穴の方向27も同図に示す。次いで、図5は扇形穿孔モードにおいて使用される座標系を示す。見て分かるように、切羽穿孔および扇形穿孔には直交座標を使用してもよく、その各軸は同じにして決めてよい。しかし、方向角の定義は互いに異なっている。工具の方向は図5に参照番号28で示す。
【0037】
図5はさらにジョイスティック29を示すが、これは前後および両側に動かすことができる。制御を補強モードに接続してジョイスティック29を前方に、すなわち操作者14から離れる方向に押すと、穿孔ユニットおよびその中の工具は、被穿孔補強穴がトンネルの切羽の方へ角度θ2で斜めに向くよう回動する。ジョイスティック29を操作者14の方へ引くと、工具は、被穿孔補強穴がトンネルの切羽から離れて斜めに向くよう方向付けられる。円錐頂角θ2は、ジョイスティック29が前方に押し出されると正の値に到達し、ジョイスティック29が後方に引かれると負の値に到達する。穿孔ユニットは、xz平面上でジョイスティック29を右へ動かすことで時計回りに回動させることができ、これによって、回転角θ1は正の値を得、被穿孔穴は右へ方向付けられる。ジョイスティック29を左に倒すと、穿孔ユニットは反時計回りに回動し、回転角θ1は負の値を得、これによって被穿孔穴は左へ方向付けられる。
【0038】
図6は補強モードにおける直感的操作原理を示す。操作者14は、ジョイスティックとは、穿孔ユニットを移動させる新たな目標位置を制御装置に与えたいときに動かす穿孔工具10であるかのように、イメージすることができる。例えば、操作者は、穿孔ユニットおよびその中の工具を回転角θ1の方向に回動させたい場合、操作部材を左もしくは右に回す。さらに、被穿孔穴を前方斜めに向けたい場合、操作者はジョイスティックを前方へ押し、また同様に、被穿孔穴を後方斜めに向けたい場合、ジョイスティックを後方へ引く。操作者14が操作部材の動きの影響を直ちに理解するのは容易である。同様の直感的操作原理をプロダクション削岩リグの制御システム内に配設して、掘削穴の扇状パターンとしての穿孔を容易化することができる。
【0039】
図7は、2つのジョイスティック15aおよび15bによる穿孔ユニット6の手動位置決めを示す。同図はジョイスティックを操作する方向を矢印で示し、この矢印に関連して、穿孔ユニット6の位置および方向に対する操作の効果を示す。操作中にスイッチ30が選択された時の操作方向の効果を括弧内に示す。別の機能をスイッチ30で選択することができる。同図で分かるように、ジョイスティック15a、15bの操作方向は、穿孔ユニット6の実際の運動方向に対して理論的に関連している。掘削モードが選択されると、動きの制御に違いがでてくる。スイッチ30が選択された場合、左側のジョイスティック15aを前方または後方に動かすと、掘削モードでは工具によって示す方向に穿孔ユニット6が動く。さらに、右側のジョイスティック15bを横方向に動かすと角度uが変化し、前後に動かすと角度vが変化する。
【0040】
図8はさらに、削岩リグの制御装置16のユーザインタフェース31およびその接続を示す。ユーザインタフェース31はディスプレイパネルなどの1台以上のディスプレイ装置25と、ジョイスティックなどの1つ以上の操作部材15とを有している。ユーザインタフェース31によって操作者14は、制御装置16およびそのプログラムと作動原理を利用して、穿孔ユニットで所望のように作業することができる。
【0041】
ディスプレイ装置25は、被穿孔扇形部の扇形パターンを示すのに使用してもよい。補強穴を穿孔する場合は、補強パターンを制御装置16にロードし、また扇状プロダクション穴を穿孔する場合は、掘削パターンを制御装置16にロードする。ディスプレイ装置25の表示画面32は、穿孔扇形平面33および穿孔ユニットの記号34を別々の方向から見て表示する2つ以上の分割画面を含んでよい。したがって操作者14は、表示画面32で位置決め状況を見て、操作部材15によって制御指令を制御装置16に与えることができ、そこで制御装置は、1つ以上のアクチュエータを制御して、制御指令に応じた穿孔ユニットの位置もしくは方向の変化を物理的に実現する。操作者14は、個々のアクチュエータ19を制御するのではなく、制御装置に対して目標位置もしくは方向、すなわち目標位置を与え、これが制御装置により実現される。操作部材15の1つの操作方向を拘束して、ディスプレイ装置25に表示された1つの方向に対して穿孔ユニットを制御する。穿孔ユニットの位置および方向は、1つ以上のセンサ18もしくは同様の測定装置によって判定され、その測定情報を制御装置16へ送る。
【0042】
図8はさらに、操作部材15を動かす効果も表示画面32に示す。操作部材15の操作方向は、操作部材15を左へ矢印35aの方向に動かすと、これに応じて表示画面32内の記号34が矢印35bで示すように左へ動くよう、直感的に決めることができる。したがって、操作部材15のこの動きはx座標のみ値を変えるが、残りの座標、すなわちyおよびzと方向角は変化しない。
【0043】
図9は、上下に配された2つの分割画面33aおよび33bを有する表示画面32を模式的に示す。第1の分割画面32aはy方向から見た穿孔扇形部26を示し、第2の分割画面32bは同じ穿孔扇形部26をz方向から見て示している。したがって穿孔扇形部26のxz平面は、両分割画面で扇形平面を形成している。第1の分割画面32aは、xz平面上での穿孔穴24の位置および方向と穿孔ユニット6の位置を示している。計画した穿孔穴24aは、穿孔パターンのプロファイルから延びる線として示してもよい。穿孔済みの穴24bは、施工した位置に四角形などのマークを用いて開始点を示してもよい。穿孔すべき計画穿孔穴24cを次に肉太で示してもよい。第2の分割画面32bは奥行き図として用いてもよい。換言すれば、穿孔ユニット6の位置は、画面内で扇形平面、すなわち穿孔扇形部のxz平面に対するものとして見ることができる。穿孔ユニット6は、表示画面32において適切な記号で示してもよい。図9では、穿孔ユニット6の記号34は丸印であり、そこから実線36が延び、この線は、穿孔ユニット6の現在位置および方向に穿孔を開始したとすれば形成されるであろう仮想穿孔穴を示す。さらに、表示画面32は送りビームを破線37で示してもよく、これに基づいて操作者は穿孔に必要なスペースにアクセスできる。上述の記号34と関連の穴線36および送りビームの線37に代わって、他の適した記号および表示方式を使用してもよい。第2の分割画面32bでは、円錐頂角の値を数値として表示することができる。さらに、第2の分割画面32bは、第1の分割画面32aに対応する扇形平面を横線38aとして示してもよい。穿孔パターンが補強パターンである場合、そのパターンに含まれる可能性のある他の補強扇形部の扇形平面も、横線38bおよび38cとして示してよい。図9による表示画面32は、分割画面32aおよび32bが垂直方向に上下に配されているが、これは明瞭で図式的であり、これによって操作者の作業が容易になる。
【0044】
図9における図形表示画面32のような画面は、操作者の作業を容易にする視覚ツールであり、補強扇形部およびプロダクション扇形部を穿孔するのに適用することができる。例えば、表示画面32のように、穿孔ユニットの記号34が被穿孔穴の開始点より下にある場合、操作部材34により記号34を真上に動かし、これによって制御装置は、他の座標もしくは方向角を何ら変えることなしに穿孔ユニットをz方向に動かす。同様に、見掛けは正確でないが穿孔ユニット記号34をすぐ左へ動かす必要があることが表示画面から明らかになれば、操作者は、操作部材によってその記号をx方向へ動かす。すなわち、穿孔ユニットに新たな目標位置を与える。操作部材は穿孔ユニットの物理的動きを案内するが、その場合、穿孔ユニットのx座標のみが変わり、残りの座標および方向角は変わらない。記号34の穴線37と穿孔パターンにて決定された穿孔穴を示す線24cが両分割画面32aおよび32bで重なっていれば、穿孔ユニットは正しく位置決めされ方向付けられている。
【0045】
図9はさらに、表示画面32の下方に、ユーザインタフェース31に含まれる操作部材15aおよび15bを上から見た状態で示す。操作部材はジョイスティックでよく、これは、操作席に関連して、例えば制御盤41a、41bに取り付けてもよい。同図は、ジョイスティック15aの動きを矢印S1およびS2で示し、穿孔ユニットが表示画面内で動く様子を示している。スイッチ30を選択すると、同図の分割画面32bに矢印S3で示すように穿孔ユニットのy座標に影響を与えることができる。右側のジョイスティック15bを使えば、矢印S4およびS5で示すように方向角に影響を与えることができる。
【0046】
図9はまた、施工した穴24bの開始点、すなわち、いわゆる岩盤識別点42も表示画面32内に表示することができることを示す。岩盤識別点42に関する情報は、制御装置に記憶し処理してもよい。さらに、表示画面32は岩盤識別点42を通る図形43を示してもよい。これは、観察下にある扇形部の1点に岩盤表層が実際に位置する箇所を示す。実際の岩盤表層に関する情報を記憶し、これを処理して削岩リグ内もしくは外部で利用してもよい。
【0047】
図10はプロダクション削岩リグに使用されるブーム5を示し、穿孔ユニット6はスイベルジョイント38によりブーム上に配設されて、穿孔ユニット6がトンネル線に対して横断方向に回動できるようになっている。スイベルジョイント38の1点には、いわゆる枢軸点PPがあり、これには穿孔穴24の仮想延長線39が通っている。ブーム5は伸縮可能な垂直アーム40を含んでよく、その下端部は継手41によりブームの水平ビーム42に連結してよい。ビームは、さらに枝様のブーム部43で支持し、ブーム部は地面に支持してよい。枢軸点PPはz方向、すなわち上方もしくは下方に、また横方向に動くことができる。枢軸点PPのx方向における水平の動きは、垂直アーム40の回動と長さの変化の複合効果によって達成することができる。垂直アーム40と水平ビーム42との間には線形ガイドを配設することもでき、これによって横の動きが可能になる。枢軸点PPの扇形平面33上の位置は、操作部材15によって制御指令を制御装置に与えることで変えることができる。操作部材15を1つの方向に動かすと、1つの座標に対する枢軸点PPの動きが形成される。これを同図に示す。操作部材15を同図における右方へ動かすと、枢軸点の目標位置も、矢印で示すようにx座標の方向における右方へ動く。制御装置は、継手制御装置の目標値を決めて、枢軸点の位置に影響を与えるアクチュエータを制御し、操作者の与えた目標値が達成されるようにする。枢軸点PP'が正しい位置をとると、扇形部の穿孔を開始することができ、穿孔ユニットは、穿孔パターンにて決められた穿孔穴の方向にこれを回すことによって枢軸点の周囲に位置決めされる。
【0048】
図11はプロダクション穿孔に適用可能な第2の構造を示し、これは、1つ以上のブーム部品から成る穿孔ブーム5の最外端部にスイベルジョイント38を有し、これを中心として穿孔ユニット6は扇形平面上で回動することができる。したがって、扇形平面上の枢軸点PPは上記ジョイントの位置に位置することができる。枢軸点PPの位置は上述のように動かすことができる。さらに、図10および図11の両方の方式では、穿孔ユニットの中心部に位置するジョイント以外の他の場所に枢軸点の位置を決めることができる。そこで、枢軸点PP'の新たな位置は、例えばドリルビットの前端部になるように決めてもよい。さらに、枢軸点PP"の扇形平面上の位置は、穿孔ブームおよび穿孔ユニットの構体とは別であってもよく、その場合、扇形平面上のいずれの位置に位置決めしてもよい。制御装置は、枢軸点の位置を考慮して、必要な位置決めの動きを決める。枢軸点PPの位置は、操作部材によって上述のように動かすことができ、ディスプレイ装置に示される表示画面を補助的に使用することができる。穿孔の際、決定した新たな枢軸点PP'もしくはPP"に対して扇形平面上で穿孔ユニット6の回動を行なう。
【0049】
図12は、扇形穿孔を削岩リグ1で行なう状態を非常に簡略化して示し、そのキャリア4は穿孔扇形平面33に対して斜めの位置へ移動されている。穿孔開始前に削岩リグ1はナビゲートされ、これによってトンネル2内におけるその位置と穿孔パターンの位置が分かる。ナビゲーションによって、削岩リグの穿孔パターンで決められた扇形平面33に対する位置を見出すことができる。制御装置は、穿孔ユニットの位置決めおよび制御の際に削岩リグ1の位置誤差を考慮に入れる。
【0050】
図13および図14は表層掘削用の削岩リグ1を示すが、これは、本願で先に説明した削岩リグの基本構造、制御原理および特徴を含むものであってもよい。表層削岩リグ1は、岩盤に掘削穴21を下方にもしくは斜め下方に向けて穿孔するのに用いてもよい。図16は、表層掘削の1つの適用例であるベンチ穿孔55の原理を示す。表層掘削では、キャリア4の1つの位置決め位置から岩盤に複数の穿孔穴を穿孔することができる。穿孔穴パターンを事前に設計しておいてもよい。穿孔ユニット6の位置決めには、本願に記載の穿孔モードを利用してもよく、その場合、操作者は、穿孔の目標位置および方向を制御装置に与え、その後、制御装置16は、要求されたブームの動きをアクチュエータの制御によって行なう。この制御は図3に示すチャートによってもよい。さらに、制御システムは直感的接続を有し、これは、操作部材により行なわれる動きが穿孔ユニット6の位置および方向に与える効果を操作者に理解させる助けとなる。図13ないし図15bは、操作部材15a、15bの操作がドリルビット20の位置および送りビーム9の方向に与える効果を示す。制御装置16はキャリア4の位置を考慮に入れて、これは、例えば傾斜計50により判定することができる。さらに、ジョイント17に関連して、もしくは目的に適った他の位置に、センサ18もしくは測定装置を配し、制御装置16は、これらから得たデータによりドリルビット20の位置および方向を決めるが、ドリルビットの方向は送りビーム9の方向と同じである。表層掘削の制御システムは一般に、削岩リグ自体の座標系を利用する。操作部材15aに関連してスイッチ51もしくは同様のものがあってもよく、これによってドリルビット20はz方向に動く。ドリルビット20を1つの座標の方向、例えばz方向へ移動させても、残りの座標xおよびyは不変であり、方向角uおよびvも不変である。これは座標制御の原理によるものである。
【0051】
場合によって、本願に記載の各構成要素は他の構成要素に無関係に用いてもよい。他方、本願に記載の各構成要件は、必要な場合、組み合わせてさまざまな組合せを形成してもよい。
【0052】
図面および関連説明は本発明の概念の説明のみを意図している。本発明の細部は特許請求の範囲内で変化させてもよい。
【特許請求の範囲】
【請求項1】
可動キャリア(4)と、
少なくとも1つの穿孔ブーム(5)と、
該穿孔ブーム(5)に配設され、送りビーム(9)および削岩機(7)を含む穿孔ユニット(6)と、
該穿孔ユニット(6)および前記キャリア(4)の間の複数の継手(17)、ならびに前記穿孔ユニット(6)の位置に影響を与える複数のアクチュエータ(19)と、
前記継手(17)に関連して前記穿孔ユニット(6)の位置を判定するセンサ(18)と、
前記穿孔ユニット(6)を位置決めする制御システムとを含み、
該制御システムは、少なくとも1つの操作部材(15)を含み、該操作部材(15)を手動で動かすことによって、前記穿孔ユニットの位置に影響を与えるアクチュエータを直接制御することなしに該穿孔ユニット(6)の位置および方向に関する目標を与え、
前記継手(17)の値を決めて所定の目標位置に到達させる制御装置(16)が配設され、
該制御装置(16)はさらに、前記アクチュエータ(19)を駆動することによって前記継手(17)を所定の値に設定するように構成され、これによって前記穿孔ユニット(6)は、前記所定の目標位置へ前進するように構成された削岩リグにおいて、
前記制御装置(16)は少なくとも1つの穿孔モードを含み、該モードにおいて、前記操作部材(15)のそれぞれ個々の操作方向は、1つの座標もしくは方向角に対してのみ前記穿孔ユニット(6)の物理的位置決め動作を生成し、残りの座標および方向は不変に維持されるように構成され、
前記操作部材(15)の影響を与える方向は、前記穿孔モードにおいて前記穿孔ユニット(6)の直感的運動方向に対応するように選択され、これによって、1つの操作方向に操作部材(15)を動かすと、該穿孔ユニット(6)の実際の動きを該操作部材(15)の動きに対応する方向に生成することを特徴とする削岩リグ。
【請求項2】
請求項1に記載の削岩リグにおいて、前記制御装置(16)のユーザインタフェース(31)は、少なくとも1つの表示画面(32)を備えた少なくとも1つのディスプレイ装置(25)を含み、
前記制御装置(16)は、前記表示画面(32)に図形記号(34)によって前記穿孔ユニット(6)の位置を、またさらに、穿孔穴の配置および方向を示すように構成され、
前記操作部材(15)の操作方向は、前記穿孔モードにおいて前記表示画面(32)に表示される方向に関連させ、これによって、該表示画面(32)に表示された1つの方向に前記操作部材(15)を動かすと、対応する方向に前記穿孔ユニット(6)の物理的位置決め動作が生ずるように構成されていることを特徴とする削岩リグ。
【請求項3】
請求項2に記載の削岩リグにおいて、
前記制御装置(16)は、穿孔パターンと、この中で決定されている穿孔穴の位置および方向とを前記表示画面(32)に表示するように構成されていることを特徴とする削岩リグ。
【請求項4】
前記請求項のいずれかに記載の削岩リグにおいて、
前記穿孔ブーム(5)およびこれに接続された穿孔ユニット(6)は、扇状補強穴をトンネル線(L)に対して横断する方向に穿孔する手段と、掘削穴(21)を岩盤洞穴の切羽(3)において前記トンネル線(L)の方向に穿孔する手段とを備え、
前記制御装置(16)は、切羽穿孔モードおよび扇形穿孔モードを含み、これらのモードでは、前記操作部材(15)の操作方向に対する該制御装置(16)の応動が異なることを特徴とする削岩リグ。
【請求項5】
前記請求項1ないし3のいずれかに記載の削岩リグにおいて、
前記穿孔ブーム(5)およびこれに接続された穿孔ユニット(6)には、扇状穿孔穴パターンのみを穿孔する手段が設けられ、
前記穿孔ユニット(6)は、水平に向けられたスイベルジョイント(38)によって前記穿孔ブーム(5)に連結され、また被穿孔扇形平面上で回動可能であり、前記穿孔パターンにて決められたように前記穿孔ユニット(6)を方向付け、
前記制御装置(16)は、前記穿孔ユニット(6)の枢軸点(PP)に対する前記扇形平面上での回動を制御するように構成され、該枢軸点の位置は、前記操作部材(15)を動かすことによって前記扇形平面上で自由に決めることができることを特徴とする削岩リグ。
【請求項6】
複数の穿孔穴(21)を所望のパターンとして岩盤に少なくとも1つの穿孔ユニット(6)により穿孔し、
穿孔すべき穿孔穴の点に前記穿孔ユニット(6)を穿孔ブーム(5)によって位置決めし、
位置および方向の情報を含む前記穿孔ユニット(6)の実際の位置を求め、
該穿孔ユニット(6)の位置決めを少なくとも1つの制御装置(16)により制御し、
少なくとも1つの手動操作部材(15)によって前記実際の位置に対する前記穿孔ユニット(6)の位置および方向の目標を与え、
前記操作部材(15)により与えられた目標を前記制御装置(16)へ送り、前記穿孔ユニット(6)に影響を与えるアクチュエータを直接制御することなく前記制御装置(16)内で前記目標を処理し、
前記目標位置および実際の位置を考慮に入れながら、アクチュエータ(19)の必要な制御動作を前記制御装置(16)において決定し、
該制御装置(16)により前記アクチュエータ(19)を制御し、前記穿孔ユニット(6)を所定の目標位置へ向けて動かすことを含む削岩方法において、該方法は、
前記手動操作部材(15)のそれぞれ個々の操作方向を対応させて、1つの座標もしくは方向角に対してのみ前記穿孔ユニット(6)の目標位置に影響を与え、
該目標位置および前記操作部材(15)の動きに直感的接続を用い、これによって前記穿孔ユニット(6)および操作部材(15)の実際の動きの方向が互いに一致することを特徴とする削岩方法。
【請求項7】
請求項6に記載の方法において、該方法は、
前記穿孔ユニット(6)を用いて複数の穿孔穴(21)を含む扇状パターンを穿孔し、
穿孔扇形平面の位置を決定し、
前記穿孔ユニット(6)を前記穿孔扇形平面上で位置決めし、
前記操作部材(15)によって、前記穿孔扇形平面に影響を与えることなく前記目標位置を該穿孔扇形平面の方向に動かすことを特徴とする方法。
【請求項8】
請求項6または7に記載の方法において、該方法は、
前記穿孔扇形部に関する穿孔穴情報を前記削岩リグのディスプレイ装置(25)の表示画面(32)に図式的に表示し、
少なくとも1つの穿孔穴に対する前記穿孔ユニット(6)の実際の位置を前記表示画面(32)に図形記号(34)で表示し、
該表示画面(32)内に表示されている1つの方向に前記操作部材(15)を動かすことにより、前記穿孔ユニット(6)を被穿孔穴の点に表示して、前記制御装置に新たな目標位置を与え、
該穿孔ユニット(6)を前記操作部材(15)の動きに対応する方向に前記制御装置(16)で制御して動かすことを特徴とする方法。
【請求項9】
前記請求項6ないし8のいずれかに記載の方法において、該方法は、
穿孔に関して設計された穿孔パターンを前記制御装置(16)のディスプレイ装置(25)に入力し、
該穿孔に関する穿孔パターンを前記ディスプレイ装置(25)の表示画面(32)に図式的に表示し、
前記穿孔パターンに対する前記穿孔ユニット(6)の実際の位置を前記表示画面(32)に図形記号(34)で表示し、
前記表示画面(32)に表示されている1つの方向へ前記操作部材(15)を動かして前記制御装置に新たな目標位置を与え、
前記穿孔ユニット(6)を前記操作部材(15)の動きに対応する方向に前記制御装置(16)で制御して動かすことを特徴とする方法。
【請求項10】
請求項6ないし9のいずれかに記載の方法において、該方法は、
扇形穿孔に加えて、同じ削岩リグ(1)を使用してトンネル切羽(3)内のトンネル線(L)の方向に掘削穴(21)を穿孔し、
扇形穿孔モードを用いることによって前記穿孔ユニット(6)を扇形穿孔において制御し、同様に切羽穿孔モードを用いて該穿孔ユニット(6)を切羽穿孔において制御し、両制御モードとも、該穿孔ユニット(6)を動かすことによって該制御モードに関連した穿孔方向に自然になるように構成されていることを特徴とする方法。
【請求項11】
前記請求項6ないし10のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
補強材を取り付けるための複数の穴の扇形を穿孔し、
補強パターンに従って穿孔を行なうことを特徴とする方法。
【請求項12】
前記請求項6ないし10のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
掘削のための複数の穴の扇形を穿孔し、
掘削パターンに従って穿孔を行なうことを特徴とする方法。
【請求項13】
前記請求項6ないし12のいずれかに記載の方法において、該方法は、
穿孔開始前に、前記削岩リグ(1)をナビゲートし、これによって該削岩リグ(1)の位置を決定し、座標系の必要な変更を行ない、
前記穿孔ユニット(6)を制御する際に前記穿孔扇形平面および削岩リグ(1)の相対位置を考慮に入れて、制御に必要な修正を行ない、
穿孔パターンに対する前記削岩リグ(1)の位置関係に係わりなく、前記穿孔ユニット(6)を該穿孔パターンにより決められた方向に制御することを特徴とする方法。
【請求項14】
前記請求項5ないし8のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
穿孔扇形平面の場所をトンネル線(L)上に決め、
前記穿孔ユニットを前記穿孔扇形平面上に位置決めし、
該穿孔ユニットを前記穿孔扇形平面上で回動させて穿孔扇形部内の被穿孔穴へ方向付け、
前記穿孔ユニット(6)の枢軸点(PP)に対する回動を行ない、その位置を操作者が前記穿孔扇形平面上で決めることを特徴とする方法。
【請求項15】
請求項14に記載の方法において、該方法は、
前記操作部材(15)により前記枢軸点(PP)に前記扇形平面上で新たな目標位置を与え、これによって、前記扇形平面上における該操作部材(15)のそれぞれ個々の操作方向が1つの座標についてのみ前記穿孔ユニット(6)の目標位置に影響を与えることを特徴とする方法。
【請求項16】
請求項14または15に記載の方法において、該方法は、
前記削岩リグのディスプレイ装置(25)の表示画面(32)に前記枢軸点(PP)の位置を図形記号として表示し、
前記表示画面(32)に示されている方向に前記枢軸点(PP)の位置を前記操作部材(15)によって動かすことを特徴とする方法。
【請求項17】
前記請求項14ないし16のいずれかに記載の方法において、該方法は、
前記穿孔扇形部の穿孔穴の中心軸の仮想延長線が前記枢軸点(PP)を通るように該穿孔穴を方向付けることを特徴とする方法。
【請求項18】
前記請求項14ないし16のいずれかに記載の方法において、該方法は、
前記枢軸点(PP)の位置をドリルビット(20)の前端部に決めることを特徴とする方法。
【請求項19】
削岩リグ(1)が少なくとも1つの穿孔ブーム(5)と、その上に配設されて所望の穿孔穴パターンを穿孔する穿孔ユニット(6)とを含み、
少なくとも1つの制御装置(16)と、
操作部材を動かして前記穿孔ユニットの位置および方向に目標を与える少なくとも1つの操作部材(15)と、
前記穿孔ユニット(6)の実際の位置および方向を求める手段とを含み、
前記制御装置(16)は、動きの条件を決定し、前記穿孔ユニット(6)の実際の位置と前記操作部材(15)により与えられた目標とに基づいて、該穿孔ユニット(6)の位置に影響を与えるアクチュエータ(19)を制御する削岩リグの制御システムにおいて、
該制御システムは少なくとも1つの穿孔モードを含み、該モードでは、前記操作部材(15)のそれぞれ個々の操作方向を拘束して1つの座標または方向角について前記穿孔ユニットを制御し、
前記操作部材(15)の操作方向を前記穿孔モードにおいて選択して、前記穿孔ユニット(6)の直感的運動方向に一致させることを特徴とする削岩リグの制御システム。
【請求項20】
請求項19に記載の制御システムにおいて、
該制御システムのユーザインタフェース(31)は、前記少なくとも1つの操作部材(15)に加えて、少なくとも1つのディスプレイ装置(25)を含み、
前記ディスプレイ装置(25)は、前記穿孔ユニット(6)の位置を図形記号(34)により表示し穿孔穴の位置および方向を表示する少なくとも1つの表示画面(32)を含み、これによって前記ディスプレイ装置(25)は、手動位置決めを行なう視覚ツールであることを特徴とする制御システム。
【請求項21】
請求項19または20に記載の制御システムにおいて、
該制御システムは扇形穿孔モードを含み、該モードは、トンネル線に対して横断する方向に穿孔穴を扇状に穿孔する場合に前記穿孔ユニット(6)を制御することを意図し、
該制御システムは切羽穿孔モードを含み、該モードは、掘削穴を前記トンネル線の方向に穿孔する場合に前記穿孔ユニット(6)を制御することを意図し、
該制御システムは、前記扇形穿孔モードおよび切羽穿孔モードにおいて異なる応答で前記操作部材の動きに応動するように構成されていることを特徴とする制御システム。
【請求項1】
可動キャリア(4)と、
少なくとも1つの穿孔ブーム(5)と、
該穿孔ブーム(5)に配設され、送りビーム(9)および削岩機(7)を含む穿孔ユニット(6)と、
該穿孔ユニット(6)および前記キャリア(4)の間の複数の継手(17)、ならびに前記穿孔ユニット(6)の位置に影響を与える複数のアクチュエータ(19)と、
前記継手(17)に関連して前記穿孔ユニット(6)の位置を判定するセンサ(18)と、
前記穿孔ユニット(6)を位置決めする制御システムとを含み、
該制御システムは、少なくとも1つの操作部材(15)を含み、該操作部材(15)を手動で動かすことによって、前記穿孔ユニットの位置に影響を与えるアクチュエータを直接制御することなしに該穿孔ユニット(6)の位置および方向に関する目標を与え、
前記継手(17)の値を決めて所定の目標位置に到達させる制御装置(16)が配設され、
該制御装置(16)はさらに、前記アクチュエータ(19)を駆動することによって前記継手(17)を所定の値に設定するように構成され、これによって前記穿孔ユニット(6)は、前記所定の目標位置へ前進するように構成された削岩リグにおいて、
前記制御装置(16)は少なくとも1つの穿孔モードを含み、該モードにおいて、前記操作部材(15)のそれぞれ個々の操作方向は、1つの座標もしくは方向角に対してのみ前記穿孔ユニット(6)の物理的位置決め動作を生成し、残りの座標および方向は不変に維持されるように構成され、
前記操作部材(15)の影響を与える方向は、前記穿孔モードにおいて前記穿孔ユニット(6)の直感的運動方向に対応するように選択され、これによって、1つの操作方向に操作部材(15)を動かすと、該穿孔ユニット(6)の実際の動きを該操作部材(15)の動きに対応する方向に生成することを特徴とする削岩リグ。
【請求項2】
請求項1に記載の削岩リグにおいて、前記制御装置(16)のユーザインタフェース(31)は、少なくとも1つの表示画面(32)を備えた少なくとも1つのディスプレイ装置(25)を含み、
前記制御装置(16)は、前記表示画面(32)に図形記号(34)によって前記穿孔ユニット(6)の位置を、またさらに、穿孔穴の配置および方向を示すように構成され、
前記操作部材(15)の操作方向は、前記穿孔モードにおいて前記表示画面(32)に表示される方向に関連させ、これによって、該表示画面(32)に表示された1つの方向に前記操作部材(15)を動かすと、対応する方向に前記穿孔ユニット(6)の物理的位置決め動作が生ずるように構成されていることを特徴とする削岩リグ。
【請求項3】
請求項2に記載の削岩リグにおいて、
前記制御装置(16)は、穿孔パターンと、この中で決定されている穿孔穴の位置および方向とを前記表示画面(32)に表示するように構成されていることを特徴とする削岩リグ。
【請求項4】
前記請求項のいずれかに記載の削岩リグにおいて、
前記穿孔ブーム(5)およびこれに接続された穿孔ユニット(6)は、扇状補強穴をトンネル線(L)に対して横断する方向に穿孔する手段と、掘削穴(21)を岩盤洞穴の切羽(3)において前記トンネル線(L)の方向に穿孔する手段とを備え、
前記制御装置(16)は、切羽穿孔モードおよび扇形穿孔モードを含み、これらのモードでは、前記操作部材(15)の操作方向に対する該制御装置(16)の応動が異なることを特徴とする削岩リグ。
【請求項5】
前記請求項1ないし3のいずれかに記載の削岩リグにおいて、
前記穿孔ブーム(5)およびこれに接続された穿孔ユニット(6)には、扇状穿孔穴パターンのみを穿孔する手段が設けられ、
前記穿孔ユニット(6)は、水平に向けられたスイベルジョイント(38)によって前記穿孔ブーム(5)に連結され、また被穿孔扇形平面上で回動可能であり、前記穿孔パターンにて決められたように前記穿孔ユニット(6)を方向付け、
前記制御装置(16)は、前記穿孔ユニット(6)の枢軸点(PP)に対する前記扇形平面上での回動を制御するように構成され、該枢軸点の位置は、前記操作部材(15)を動かすことによって前記扇形平面上で自由に決めることができることを特徴とする削岩リグ。
【請求項6】
複数の穿孔穴(21)を所望のパターンとして岩盤に少なくとも1つの穿孔ユニット(6)により穿孔し、
穿孔すべき穿孔穴の点に前記穿孔ユニット(6)を穿孔ブーム(5)によって位置決めし、
位置および方向の情報を含む前記穿孔ユニット(6)の実際の位置を求め、
該穿孔ユニット(6)の位置決めを少なくとも1つの制御装置(16)により制御し、
少なくとも1つの手動操作部材(15)によって前記実際の位置に対する前記穿孔ユニット(6)の位置および方向の目標を与え、
前記操作部材(15)により与えられた目標を前記制御装置(16)へ送り、前記穿孔ユニット(6)に影響を与えるアクチュエータを直接制御することなく前記制御装置(16)内で前記目標を処理し、
前記目標位置および実際の位置を考慮に入れながら、アクチュエータ(19)の必要な制御動作を前記制御装置(16)において決定し、
該制御装置(16)により前記アクチュエータ(19)を制御し、前記穿孔ユニット(6)を所定の目標位置へ向けて動かすことを含む削岩方法において、該方法は、
前記手動操作部材(15)のそれぞれ個々の操作方向を対応させて、1つの座標もしくは方向角に対してのみ前記穿孔ユニット(6)の目標位置に影響を与え、
該目標位置および前記操作部材(15)の動きに直感的接続を用い、これによって前記穿孔ユニット(6)および操作部材(15)の実際の動きの方向が互いに一致することを特徴とする削岩方法。
【請求項7】
請求項6に記載の方法において、該方法は、
前記穿孔ユニット(6)を用いて複数の穿孔穴(21)を含む扇状パターンを穿孔し、
穿孔扇形平面の位置を決定し、
前記穿孔ユニット(6)を前記穿孔扇形平面上で位置決めし、
前記操作部材(15)によって、前記穿孔扇形平面に影響を与えることなく前記目標位置を該穿孔扇形平面の方向に動かすことを特徴とする方法。
【請求項8】
請求項6または7に記載の方法において、該方法は、
前記穿孔扇形部に関する穿孔穴情報を前記削岩リグのディスプレイ装置(25)の表示画面(32)に図式的に表示し、
少なくとも1つの穿孔穴に対する前記穿孔ユニット(6)の実際の位置を前記表示画面(32)に図形記号(34)で表示し、
該表示画面(32)内に表示されている1つの方向に前記操作部材(15)を動かすことにより、前記穿孔ユニット(6)を被穿孔穴の点に表示して、前記制御装置に新たな目標位置を与え、
該穿孔ユニット(6)を前記操作部材(15)の動きに対応する方向に前記制御装置(16)で制御して動かすことを特徴とする方法。
【請求項9】
前記請求項6ないし8のいずれかに記載の方法において、該方法は、
穿孔に関して設計された穿孔パターンを前記制御装置(16)のディスプレイ装置(25)に入力し、
該穿孔に関する穿孔パターンを前記ディスプレイ装置(25)の表示画面(32)に図式的に表示し、
前記穿孔パターンに対する前記穿孔ユニット(6)の実際の位置を前記表示画面(32)に図形記号(34)で表示し、
前記表示画面(32)に表示されている1つの方向へ前記操作部材(15)を動かして前記制御装置に新たな目標位置を与え、
前記穿孔ユニット(6)を前記操作部材(15)の動きに対応する方向に前記制御装置(16)で制御して動かすことを特徴とする方法。
【請求項10】
請求項6ないし9のいずれかに記載の方法において、該方法は、
扇形穿孔に加えて、同じ削岩リグ(1)を使用してトンネル切羽(3)内のトンネル線(L)の方向に掘削穴(21)を穿孔し、
扇形穿孔モードを用いることによって前記穿孔ユニット(6)を扇形穿孔において制御し、同様に切羽穿孔モードを用いて該穿孔ユニット(6)を切羽穿孔において制御し、両制御モードとも、該穿孔ユニット(6)を動かすことによって該制御モードに関連した穿孔方向に自然になるように構成されていることを特徴とする方法。
【請求項11】
前記請求項6ないし10のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
補強材を取り付けるための複数の穴の扇形を穿孔し、
補強パターンに従って穿孔を行なうことを特徴とする方法。
【請求項12】
前記請求項6ないし10のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
掘削のための複数の穴の扇形を穿孔し、
掘削パターンに従って穿孔を行なうことを特徴とする方法。
【請求項13】
前記請求項6ないし12のいずれかに記載の方法において、該方法は、
穿孔開始前に、前記削岩リグ(1)をナビゲートし、これによって該削岩リグ(1)の位置を決定し、座標系の必要な変更を行ない、
前記穿孔ユニット(6)を制御する際に前記穿孔扇形平面および削岩リグ(1)の相対位置を考慮に入れて、制御に必要な修正を行ない、
穿孔パターンに対する前記削岩リグ(1)の位置関係に係わりなく、前記穿孔ユニット(6)を該穿孔パターンにより決められた方向に制御することを特徴とする方法。
【請求項14】
前記請求項5ないし8のいずれかに記載の方法において、該方法は、
扇形穿孔に前記削岩リグを使用し、
穿孔扇形平面の場所をトンネル線(L)上に決め、
前記穿孔ユニットを前記穿孔扇形平面上に位置決めし、
該穿孔ユニットを前記穿孔扇形平面上で回動させて穿孔扇形部内の被穿孔穴へ方向付け、
前記穿孔ユニット(6)の枢軸点(PP)に対する回動を行ない、その位置を操作者が前記穿孔扇形平面上で決めることを特徴とする方法。
【請求項15】
請求項14に記載の方法において、該方法は、
前記操作部材(15)により前記枢軸点(PP)に前記扇形平面上で新たな目標位置を与え、これによって、前記扇形平面上における該操作部材(15)のそれぞれ個々の操作方向が1つの座標についてのみ前記穿孔ユニット(6)の目標位置に影響を与えることを特徴とする方法。
【請求項16】
請求項14または15に記載の方法において、該方法は、
前記削岩リグのディスプレイ装置(25)の表示画面(32)に前記枢軸点(PP)の位置を図形記号として表示し、
前記表示画面(32)に示されている方向に前記枢軸点(PP)の位置を前記操作部材(15)によって動かすことを特徴とする方法。
【請求項17】
前記請求項14ないし16のいずれかに記載の方法において、該方法は、
前記穿孔扇形部の穿孔穴の中心軸の仮想延長線が前記枢軸点(PP)を通るように該穿孔穴を方向付けることを特徴とする方法。
【請求項18】
前記請求項14ないし16のいずれかに記載の方法において、該方法は、
前記枢軸点(PP)の位置をドリルビット(20)の前端部に決めることを特徴とする方法。
【請求項19】
削岩リグ(1)が少なくとも1つの穿孔ブーム(5)と、その上に配設されて所望の穿孔穴パターンを穿孔する穿孔ユニット(6)とを含み、
少なくとも1つの制御装置(16)と、
操作部材を動かして前記穿孔ユニットの位置および方向に目標を与える少なくとも1つの操作部材(15)と、
前記穿孔ユニット(6)の実際の位置および方向を求める手段とを含み、
前記制御装置(16)は、動きの条件を決定し、前記穿孔ユニット(6)の実際の位置と前記操作部材(15)により与えられた目標とに基づいて、該穿孔ユニット(6)の位置に影響を与えるアクチュエータ(19)を制御する削岩リグの制御システムにおいて、
該制御システムは少なくとも1つの穿孔モードを含み、該モードでは、前記操作部材(15)のそれぞれ個々の操作方向を拘束して1つの座標または方向角について前記穿孔ユニットを制御し、
前記操作部材(15)の操作方向を前記穿孔モードにおいて選択して、前記穿孔ユニット(6)の直感的運動方向に一致させることを特徴とする削岩リグの制御システム。
【請求項20】
請求項19に記載の制御システムにおいて、
該制御システムのユーザインタフェース(31)は、前記少なくとも1つの操作部材(15)に加えて、少なくとも1つのディスプレイ装置(25)を含み、
前記ディスプレイ装置(25)は、前記穿孔ユニット(6)の位置を図形記号(34)により表示し穿孔穴の位置および方向を表示する少なくとも1つの表示画面(32)を含み、これによって前記ディスプレイ装置(25)は、手動位置決めを行なう視覚ツールであることを特徴とする制御システム。
【請求項21】
請求項19または20に記載の制御システムにおいて、
該制御システムは扇形穿孔モードを含み、該モードは、トンネル線に対して横断する方向に穿孔穴を扇状に穿孔する場合に前記穿孔ユニット(6)を制御することを意図し、
該制御システムは切羽穿孔モードを含み、該モードは、掘削穴を前記トンネル線の方向に穿孔する場合に前記穿孔ユニット(6)を制御することを意図し、
該制御システムは、前記扇形穿孔モードおよび切羽穿孔モードにおいて異なる応答で前記操作部材の動きに応動するように構成されていることを特徴とする制御システム。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15a】
【図15b】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15a】
【図15b】
【図16】
【公表番号】特表2013−520591(P2013−520591A)
【公表日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−554386(P2012−554386)
【出願日】平成23年2月24日(2011.2.24)
【国際出願番号】PCT/FI2011/050166
【国際公開番号】WO2011/104441
【国際公開日】平成23年9月1日(2011.9.1)
【出願人】(506286478)サンドビク マイニング アンド コンストラクション オサケ ユキチュア (70)
【氏名又は名称原語表記】SANDVIK MINING AND CONSTRUCTION OY
【Fターム(参考)】
【公表日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【国際出願番号】PCT/FI2011/050166
【国際公開番号】WO2011/104441
【国際公開日】平成23年9月1日(2011.9.1)
【出願人】(506286478)サンドビク マイニング アンド コンストラクション オサケ ユキチュア (70)
【氏名又は名称原語表記】SANDVIK MINING AND CONSTRUCTION OY
【Fターム(参考)】
[ Back to top ]