
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フィードフォワード制御およびフィードバック制御により、要求される車両の前後方向の加速度が得られるようにする前後加速度制御装置に関するものである。
【背景技術】
【0002】
従来、車両の前後方向の加速度を所望の車両加速度に自動的に調整することができる装置として、特許文献1に示される車両走行制御装置がある。この特許文献1の車両走行制御装置では、スリップの発生を確実に抑制して車両を自動走行させる。この自動走行では、車輪の接地荷重や路面の摩擦係数に基づき、車輪に付与した際に車輪にスリップが生じない許容トルクを演算すると共に、演算された許容トルクを車輪に付与した場合に車両に作用させ得る制限加速度を求め、制限加速度と要求加速度との比較結果に基づき、現実に車両に作用させる加速度に対応するフィードフォワードトルクを求めている。
【0003】
そして、各車輪の接地荷重が路面勾配によって変化し、例えば、登り勾配においては前輪荷重が減少して後輪荷重が増加し、下り勾配ではその逆となることから、路面勾配によって求まる動的な荷重配分をも考慮して車輪の接地荷重を求めることで、各種の路面状態に対応した車両の自動走行が行えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−051310号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したフィードフォワードトルクは、要求加速度に対応する要求トルクと路面勾配に対応した接地荷重に含まれる推定勾配トルクとを足し合わせることにより算出される。このため、何らかの要因によって推定勾配トルクの算出精度が低下すれば、それだけフィードフォワードトルクの精度も低下するという問題がある。
【0006】
本発明は上記点に鑑みて、推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できる前後加速度制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、フィードフォワード制御器(3c)から出力されるフィードフォワードトルクとフィードバック制御器(3f)から出力されるフィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置において、推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて、フィードバック制御器のゲインを高くする補正を行うことで、フィードバックトルクを補正するフィードバックトルク補正部(3i)とを備えることを特徴としている。
【0008】
このように、推定勾配信頼度を演算すると共に、推定勾配信頼度の低下に応じてフィードバック制御器のゲインが高くなるようにする補正を行っている。これにより、推定勾配信頼度に応じて補正したフィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【0009】
請求項2に記載の発明では、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、フィードフォワード制御器は、推定勾配トルク補正部にて補正された後の推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴としている。
【0010】
請求項2に記載の発明では、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて推定勾配トルク補正部(3k)を有し、フィードフォワード制御器は、推定勾配トルク補正部にて補正された後の推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴としている。
【0011】
このように推定勾配トルクを推定勾配信頼度に応じて補正し、補正後の推定勾配トルクを用いてフィードフォワードトルクを演算している。この場合、推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対しても推定勾配信頼度に応じた補正を行うことで、フィードフォワードトルク自身の精度低下を抑制し、フィードフォワード制御の精度低下を小さくすることが可能となる。
【0012】
例えば請求項3に記載したように、請求項1に示される前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下応じて、前記推定勾配トルクを補正する推定勾配トルク補正部(3k)に加え、前記推定勾配トルク補正部にて補正された後の前期推定勾配トルクに基づいて前記フィードフォワードトルクを算出するフィードフォワード制御器の両方を具備するようにしても良い。
【0013】
この場合、フィードフォワードトルク自身の精度低下を小さくすることに加え、フィードバック側で残った誤差を反映した実加速度などの実値を取得して補正するため、フィードフォワードトルクの補正のみを行った場合に対し精度よく補正することができ、フィードフォワード制御の精度低下を確実に抑制することができる。
【0014】
例えば、請求項4に記載したように、推定勾配トルク補正部にて、推定勾配信頼度算出部が算出した推定勾配信頼度の低下に応じて、推定勾配トルクの絶対値が小さくなるように、該推定勾配トルクを補正することができる。
【0015】
このように、推定勾配信頼度の低下に合せて推定勾配トルクの絶対値が小さくなるようにすれば、推定勾配トルクの関与する割合を減らすことができ、推定勾配の誤差の影響を小さくすることができる。
【0016】
また、請求項5に記載したように、推定勾配トルク補正部にて、推定勾配信頼度算出部が算出した推定勾配信頼度の低下に応じて、推定勾配トルクの誤差幅を算出し、推定勾配トルクを誤差幅に応じて補正することもできる。
【0017】
このように、推定勾配トルクを誤差幅に応じて補正すれば、誤差幅を検証した上で推定勾配トルクを小さくする範囲を決めることができるため、適切な補正量で推定勾配トルクを補正することができる。
【0018】
さらに、請求項6に記載したように、フィードバックトルク補正部では、推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を備えておき、該マップもしくは関数式に基づいて、算出された推定勾配信頼度に対応するフィードバック用信頼性係数を求めると共に、該フィードバック用信頼性係数に基づいてフィードバックトルクを補正することができる。
【0019】
このように、シミュレーションや実車走行などで求めた推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を用いてフィードバック用信頼性係数を求めることで、フィードバックトルクを適正に補正することができる。
【0020】
さらに、請求項7に記載したようにフィードバックトルク補正部は、要求車軸トルクと補正後推定勾配トルクに基づいて、例えばこれらの絶対値の比率に基づいて、推定勾配信頼度に対応するフィードバック用信頼性係数を求めるようにして、推定勾配トルクの影響度と信頼度の両方に応じて、フィードバックトルクを補正することができる。
【0021】
請求項8に示したように、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合が小さい場合よりも大きい場合のほうが、推定勾配信頼度に対するフィードバック用信頼性係数が大きくなるように補正することで、フィードバックトルクを適切に補正することができる。
【0022】
また、推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップを用いてフィードバック用信頼性係数を求める場合は、請求項9に記載したように、フィードバックトルク補正部は、推定勾配信頼度とフィードバック用信頼性係数との関係が異なるマップを複数有し、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合によってマップを選択し、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合が小さい場合に選択されるマップ対し、大きい場合に選択されるマップの方が、推定勾配信頼度に対するフィードバック用信頼性係数が大きくなるように推定勾配信頼度とフィードバック用信頼性係数との関係を設定することで、複雑な演算を行うことなくフィードバック用信頼性係数を補正することができる。
【0023】
例えば、請求項10に記載したように、推定勾配トルクとして、路面勾配によって車両に発生する前後方向の加速度である推定路面加速度をトルク換算したものを用いることができ、フィードバック制御器にて、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させ、フィードフォワード制御器にて、要求トルクに相当する車両の前後方向の加速度の制御を行うための要求車軸トルクと、推定勾配トルクを推定勾配トルク補正部によって補正した補正後推定勾配トルクとからフィードフォワードトルクを演算することができる。
【0024】
推定勾配の誤差の発生により、駆動と制動の交互の断続的作動を招き易くなる。このため、要求車軸トルクと路面勾配トルクとからフィードフォワードトルクを演算し、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させるような前後加速度制御装置に対して、上記各請求項に記載の発明を適用すると特に効果が大きい。
【0025】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態にかかる車両制駆動力制御システムのブロック図である。
【図2】前後方向制御部3の内部構造を模式的に示したブロック図である。
【図3】推定勾配信頼度算出部3hの内部構造を模式的に示したブロック図である。
【図4】経年劣化と推定勾配信頼度との関係の一例を示した図である。
【図5】加速度センサ温度と推定勾配信頼度の関係の一例を示した図である。
【図6】積載量の学習の度合いと推定勾配信頼度との関係の一例を示した図である。
【図7】悪路レベルと推定勾配信頼度との関係の一例を示した図である。
【図8】フィードバックトルク補正部3iの内部構造を模式的に示したブロック図である。
【図9】推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。
【図10】推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。
【図11】推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。
【図12】推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。
【図13】推定勾配トルク補正部3kの内部構造を模式的に示したブロック図である。
【図14】(a)は、各項目別の誤差幅の演算に用いる推定勾配信頼度と誤差幅の関係を示したマップであり、(b)は、各項目別の誤差最大幅を示した図表である。
【図15】推定勾配信頼度が低い場合(誤差幅0.13G)と高い場合(誤差幅0.01G)の推定勾配トルクと補正後推定勾配トルクの関係を示したグラフである。
【図16】本発明の第2実施形態にかかる車両制駆動力制御システムのフィードバック制御器3fおよびフィードバックトルク補正部3iの構造例を示したブロック図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0028】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、本発明の一実施形態における前後加速度制御装置が適用された車両制駆動力制御システムを例に挙げて、本発明の前後加速度制御装置について説明する。
【0029】
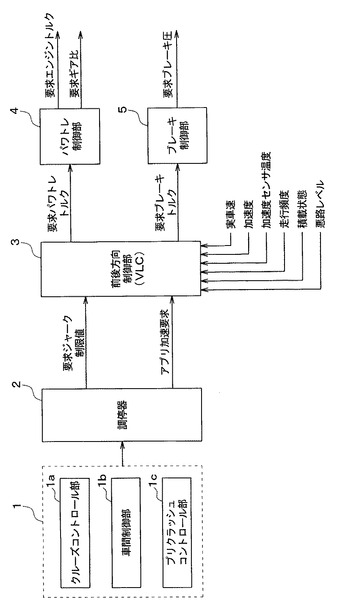
図1は、車両制駆動力制御システムのブロック図である。この図に示されるように、車両制駆動力制御システムは、加速度要求部1、調停器2、前後方向制御部3、パワトレ制御部4およびブレーキ制御部5を有している。これらのうちの前後方向制御部3が前後加速度制御装置に相当する。
【0030】
加速度要求部1は、車両前後加速度制御を行う各アプリケーションからの要求に従って、車両状態に応じた加速度の要求信号を出力する。本実施形態の場合、加速度要求部1は、各アプリケーションを実行するクルーズコントロール部1a、車間制御部1b、プリクラッシュコントロール部1cを備えている。クルーズコントロール部1aは、車両の走行速度を一定値に制御するために必要な加速度の要求信号を出力する。車間制御部1bは、前方車両との車間距離が予め決められた値となるようにするために必要な加速度の要求信号を出力する。プリクラッシュコントロール部1cは、前方車両との衝突を回避するために必要な加速度の要求信号を出力する。
【0031】
調停器2は、加速度要求部1から入力される要求信号が示す加速度を調停し、一制御周期内での加速度の要求値の変化量、つまり車両前後方向における要求加速度の微分値であるジャークをアプリ加速度要求として出力する。また、調停器2は、車両状態に応じたジャークの制限値を演算し、要求ジャーク制限値として出力する。
【0032】
前後方向制御部3は、調停器2が出力するアプリ加速度要求および要求ジャーク制限値を受け取ると共に、実車速、経年劣化、加速度(加速度センサ値)、加速度センサ温度、積載状態、悪路レベルなどに関するデータを受け取ることで、要求パワトレトルクおよび要求ブレーキトルクを求める。例えば、実車速に関するデータについては、図示しないメータECU等から受け取ることができる。加速度や加速度センサ温度に関するデータについては、図示しない温度検出機能付き加速度センサから受け取ることができる。経年劣化に関するデータについては、加速度センサへの通電を制御する図示しないECU等から受け取ることができる。積載情報については、ヘッドライト調整等で用いられている車高センサの検出信号もしくはエンジントルクと実加速度との関係に基づいて積載量の演算を行っているECU等から受け取ることができる。悪路レベルに関するデータについては、図示しないブレーキECU等から受け取ることができる。
【0033】
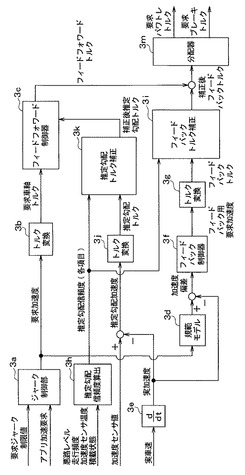
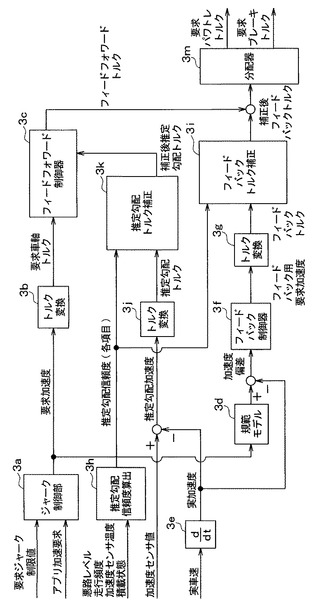
具体的には、前後方向制御部3は、アプリ加速度要求、要求ジャーク制限値、および、受け取った上記各データに基づいてフィードフォワード制御およびフィードバック制御を行い、要求パワトレトルクおよび要求ブレーキトルクを求める。図2は、この前後方向制御部3の内部構造を模式的に示したブロック図である。
【0034】
図2に示されるように、前後方向制御部3は、ジャーク制御部3a、トルク変換部3b、フィードフォワード制御器3c、規範モデル記憶部3d、微分器3e、フィードバック制御器3f、トルク変換部3g、推定勾配信頼度算出部3h、フィードバックトルク補正部3i、トルク変換部3j、推定勾配トルク補正部3kおよび分配器3mを有している。
【0035】
ジャーク制御部3aは、調停器2が出力するアプリ加速度要求に対応する要求加速度を演算する。このとき、ジャーク制御部3aは、調停器2が出力する要求ジャーク制限値にて加速度変化量を制限しつつ要求加速度を演算する。例えばアプリ加速度要求が車両を加速させる要求、つまり正の値であれば要求加速度は正の値となり、逆にアプリ加速度要求が車両を減速させる要求、つまり負の値であれば要求加速度は負の値となる。
【0036】
トルク変換部3bは、ジャーク制御部3aで演算された要求加速度をトルク換算し、要求加速度と対応する要求車軸トルクに変換する。加速度と車軸トルクとの関係は、車両の運動方程式および車両諸元から予め求められており、その関係に基づいて要求加速度のトルク換算を行っている。
【0037】
フィードフォワード制御器3cは、実際の加速度がアプリ加速度要求に近づくようにフィードフォワード制御を行う。具体的には、フィードフォワード制御器3cは、トルク変換部3bから出力される要求車軸トルクと、後述する推定勾配トルク補正部3kで演算された補正後推定勾配トルクに基づき、入力された要求車軸トルクに対して入力された補正後推定勾配トルクを加算することにより、フィードフォワードトルクを演算する。なお、ここでは図示していないが、フィードフォワード制御器3cには、推定ブレーキトルクや推定パワトレトルクも入力されており、これらに基づいてフィードフォワードトルクとして、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクを演算している。
【0038】
規範モデル記憶部3dは、フィードバック制御を行うための規範モデルを記憶しており、規範モデルに従い、入力された要求加速度に対応した規範モデルから求められる要求加速度を設定する。ここで用いられる規範モデルは車両特性などに合せて個々に設定される。規範モデルとしては、パワトレ規範モデルやブレーキ規範モデルがあり、パワトレ規範モデルに基づいて要求パワトレ加速度を設定し、ブレーキ規範モデルに基づいて要求ブレーキ加速度を設定している。
【0039】
微分器3eは、データ入力された実車速を微分することにより、実際に発生した加速度(以下、実加速度という)を演算する。実車速に関するデータについては、例えば図示しないメータECU等から車内LANを通じて入力することができる。なお、ここでは微分器3eにて実加速度を演算するようにしているが、図示しない他のECU等において既に実加速度が演算されている場合には、その演算結果が前後方向制御部3に入力されるようにしても良い。
【0040】
フィードバック制御器3fは、実加速度が要求加速度に近づくようにフィードバック制御を行う。具体的には、フィードバック制御器3fは、規範モデル記憶部3dで設定された要求加速度から実加速度を減算することによって得られる加速度偏差が0に近づくようにフィードバック用要求加速度、すなわちパワトレフィードバック要求加速度やブレーキフィードバック要求加速度を演算する。このフィードバック用要求加速度の演算手法については、一般的なフィードバック制御の演算で用いられるようなPID制御等を用いることができる。
【0041】
トルク変換部3gは、フィードバック制御器3fで演算されたフィードバック用要求加速度をトルク換算し、フィードバック用要求加速度と対応するフィードバックトルクを求める。これにより、パワトレフィードバック要求加速度やブレーキフィードバック要求加速度がトルク換算され、パワトレフィードバックトルクやブレーキフィードバックトルクが演算される。
【0042】
推定勾配信頼度算出部3hは、データ入力された経年劣化、加速度センサ温度、積載状態、悪路レベルに基づいて推定勾配信頼度を算出する。この推定勾配信頼度の算出方法については、後で詳細に説明する。
【0043】
フィードバックトルク補正部3iは、推定勾配信頼度算出部3hで算出された推定勾配信頼度に基づいて、トルク変換部3gでトルク変換されたフィードバックトルクを補正し、補正後フィードバックトルクを演算する。この補正後フィードバックトルクの演算方法についても、後で詳細に説明する。
【0044】
トルク変換部3jは、加速度センサから入力された加速度(加速度センサ値)と微分器3eで演算された実加速度との偏差、つまり路面勾配に応じて発生する重力成分の加速度(以下、推定勾配加速度という)をトルク換算することで、推定勾配トルクを演算する。
【0045】
推定勾配トルク補正部3kは、推定勾配信頼度算出部3hで算出された推定勾配信頼度に基づいて、トルク変換部3jでトルク変換された推定勾配トルクを補正し、補正後推定勾配トルクを演算する。この補正後推定勾配トルクについても、後で詳細に説明する。
【0046】
分配器3mは、フィードバックトルク補正部3iで求められた補正後のフィードバックトルクと、フィードフォワード制御器3cで演算されたフィードフォワードトルクとの加算値から実際に出力する制駆動力配分を設定する。この制駆動力配分が、要求パワトレトルクと要求ブレーキトルクとしてパワトレ制御部4およびブレーキ制御部5に伝えられる。
【0047】
パワトレ制御部4は、パワトレECU等により構成されるもので、要求パワトレトルクに応じて、エンジンに対するトルク要求値(要求エンジントルク)や自動変速装置に対するギア比の要求値(要求ギア比)を出力する。ブレーキ制御部5は、ブレーキECU等により構成されるもので、要求ブレーキトルクに応じて、ブレーキ制御用のアクチュエータが発生させるホイールシリンダ圧の要求値を出力する。これにより、制駆動力配分に応じた駆動力および制動力が発生させられ、所望の加速度を得ることができる。
【0048】
次に、上記のように構成された車両制駆動力制御システムにおける推定勾配信頼度算出部3h、フィードバックトルク補正部3iおよび推定勾配トルク補正部3kによる推定勾配信頼度の算出方法やフィードバックトルクおよび推定勾配トルクの補正方法について説明する。
【0049】
まず、推定勾配信頼度算出部3hによる推定勾配信頼度の算出方法について説明する。上述したように、推定勾配信頼度は、データ入力された経年劣化、加速度センサ温度、積載状態、悪路レベルに基づいて算出される。推定勾配信頼度は、様々な要因によって変化するが、その要因として経年劣化、加速度センサ温度、積載状態、悪路レベルが挙げられる。このため、これらに基づいて推定勾配信頼度を算出する。
【0050】
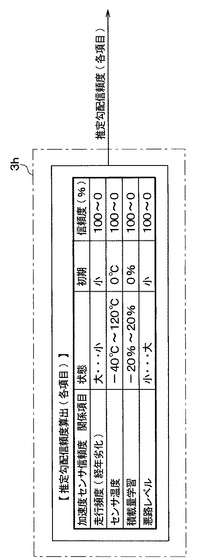
図3は、推定勾配信頼度算出部3hの内部構造を模式的に示したブロック図である。この図に示されるように、推定勾配信頼度算出部3hでは、推定勾配の信頼性に影響を与える外乱要因について調べ、それに応じた推定勾配信頼度を得る。本実施形態では、推定勾配信頼度算出部3hは、推定勾配信頼度の関連項目に対応する各種状態、初期状態および信頼度のマップを有しており、各項目ごとの信頼度を選択して出力する。
【0051】
具体的には、図3中に示したように、推定勾配信頼度の関連項目としては、経年劣化、加速度センサ温度、積載状態、悪路レベルなどがある。
【0052】
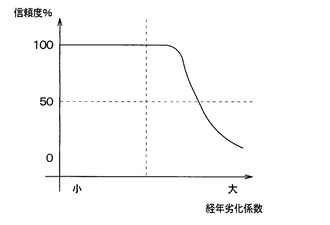
経年劣化については、経年劣化が大きいほど推定勾配信頼度が低くなる関係となる。 図4は、経年劣化と推定勾配信頼度との関係の一例を示した図である。この図に示されるように、経年劣化係数が例えば0.5までは推定勾配信頼度を100%とし、それを超えると、経年劣化係数が大きくなるほど推定勾配信頼度が低下するような関係とすることができる。経年劣化は、様々な要因をパラメータとして定義されるが、例えば、経年劣化を数値化した経年劣化係数は、以下のような数式で表される。
【0053】
(数1)
経年劣化係数=通電劣化係数×通電時間+走行距離劣化係数×走行距離+経過時間劣化係数+経過時間
ここで、通電劣化係数とは、加速度センサへの通電による劣化を表す係数である。走行距離劣化係数とは、車両の走行距離に応じた加速度センサの劣化を表す係数である。経過時間劣化係数とは、加速度センサの新品の状態からの経過時間に応じた劣化を表す係数である。これら各係数は、加速度センサの種類や車両への加速度センサの搭載位置等によって異なる。通電時間は加速度センサへ通電を行ったトータルの時間であり、イグニッションスイッチがオンされていた時間を算出することで求められる。走行距離は、ODOメータの積算距離に関するデータをメータECUから受け取ることにより求められる。経過時間は、加速度センサの製造からの経過時間を想定し、ナビゲーションシステムにて最初の起動時間からの経過時間を計測させておき、そのデータを受け取ることにより求められる。
【0054】
例えば、通電劣化係数を0.1、走行距離劣化係数を0.05、経過時間劣化係数を0.02とし、通電時間については1000Hを1、走行距離については1万kmを1、経過時間については1年を1として経年劣化係数が演算される。通電時間1000H、走行距離5万km、経過時間5年であれば、経年劣化係数は0.45(=0.1×1+0.05×5+0.02×5)となる。よって、この場合には、経年劣化に対する推定勾配信頼度は100%となる。
【0055】
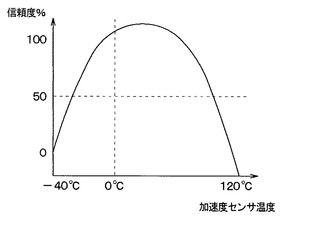
加速度センサ温度については、常温近辺においては推定勾配信頼度が高いが、温度が低くなればなるほど、また、温度が高くなればなるほど、推定勾配信頼度が低くなる。このため、初期値を0℃とし、加速度センサ温度に応じて推定勾配信頼度を100〜0%に設定している。
【0056】
図5は、加速度センサ温度と推定勾配信頼度の関係の一例を示した図である。この図に示されるように、車両の使用環境、つまり加速度センサの搭載場所の温度として想定される温度を例えば−40℃〜120℃、常温(例えば27℃)を信頼度100%とし、そこを中心として、温度が低くなるほど、または、温度が高くなるほど、徐々に信頼度が低下するように設定することができる。このような加速度センサ温度と推定勾配信頼度との関係は、加速度センサの温度特性を予め実験によって調べておくことによって求めることができる。
【0057】
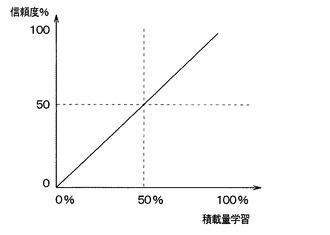
積載状態については、積載量の学習の度合いによって推定勾配信頼度が変化し、その度合いが高くなればなるほど推定勾配信頼度も高くなる。このため、積載量の学習の度合いの初期値を0%とし、その度合い100〜0%に対応して推定勾配信頼度を100〜0%に設定している。
【0058】
図6は、積載量の学習の度合いと推定勾配信頼度との関係の一例を示した図である。この図に示されるように、積載量の学習の度合いに比例して推定勾配信頼度を高くするようにしている。積載量の学習は、例えば、一度のイグニッションスイッチのオン毎に行われ、走行してからの時間などをパラメータとして、車高センサの検出信号もしくはエンジントルクと実加速度との関係等に基づいて積載量を演算すると共に、走行してからの経過時間を考慮した積載量の確からしさを学習の度合いとして表したものであるが、周知のものであるため、ここでは説明を省略する。
【0059】
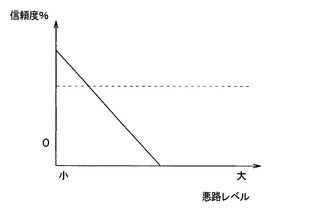
悪路レベルについては、悪路レベルが大きいほど車輪の浮き上がりの影響などを受けて推定勾配信頼度を低下させることになる。このため、悪路レベルの初期値を小とし、悪路レベルが大きくなるほど推定勾配信頼度が低下するように、悪路レベルに対応して推定勾配信頼度を100〜0%に設定している。
【0060】
図7は、悪路レベルと推定勾配信頼度との関係の一例を示した図である。この図に示されるように、悪路レベルが大きくなるほど推定勾配信頼度が直線的に低下するようにすることができる。
【0061】
このようにして、推定勾配信頼度算出部3hにおいて、推定勾配信頼度の変動要因となる各項目別に、推定勾配信頼度が演算される。そして、この各項目毎の推定勾配信頼度がフィードバックトルク補正部3iおよび推定勾配トルク補正部3kに伝えられる。
【0062】
次に、フィードバックトルク補正部3iによるフィードバックトルクの補正方法について説明する。上述したように、フィードフォワード制御器3cは、要求車軸トルクに対して推定勾配トルクを足し合わせることによってフィードフォワードトルクを演算している。このため、推定勾配トルクの信頼度が低下すれば、フィードフォワードトルクの精度が低下する。したがって、フィードバックトルク補正部3iにより、推定勾配信頼度算出部3hで演算された推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完し、総合的に精度低下を防ぐ。
【0063】
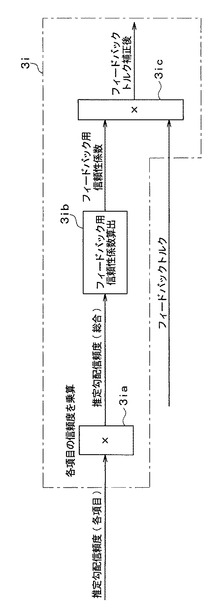
図8は、フィードバックトルク補正部3iの内部構造を模式的に示したブロック図である。この図に示されるように、フィードバックトルク補正部3iには、乗算器3ia、フィードバック用信頼性係数算出部3ibおよび乗算器3icが備えられている。
【0064】
乗算器3iaは、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度を掛け合わせることにより、各項目すべてを考慮した総合的な推定勾配信頼度を演算する。
【0065】
フィードバック用信頼性係数算出部3ibは、総合的な推定勾配信頼度に基づいてフィードバック用信頼性係数を求める。フィードバック用信頼性係数は、推定勾配信頼度に対応してフィードバックトルクを補正するときの重み付け量に相当する。推定勾配信頼度に対するフィードバック用信頼性係数の関係は、例えばマップもしくは関数式(四則演算式)として予め記憶されており、それらを使用してフィードバック用信頼性係数を求めることができる。このマップや関数式はシミュレーションや実車走行などにより予め求めておくことができ、このようなマップもしくは関係式を用いてフィードバック用信頼性係数を求めることで、フィードバックトルクを適正に補正することができる。
【0066】
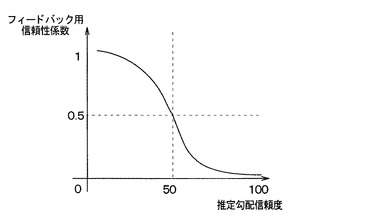
図9は、推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。この図に示されるように、推定勾配信頼度が100%のときにフィードバック用信頼性係数が最も小さな値となり、推定勾配信頼度が100%未満になるとフィードバック用信頼性係数が徐々に大きくなって、推定勾配信頼度が50%のときにフィードバック用信頼性係数が0.5、さらに推定勾配信頼度が低下するとフィードバック用信頼性係数が1に近づくような関係とすることができる。
【0067】
さらに、推定勾配信頼度に加え、フィードフォワード演算で演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率に基づいてフィードバック用信頼性係数を求めても良い。これにより、推定勾配トルクの影響度と信頼度の両方に応じて、最適のフィードバック用信頼性係数を設定することができる。
【0068】
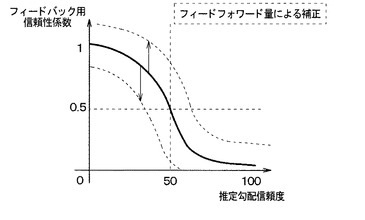
例えば、推定勾配信頼度に対するフィードバック用信頼性係数の関係は、推定勾配信頼度が100%のときにフィードバック用信頼性係数が最も小さな値となり、推定勾配信頼度が100%未満になるとフィードバック用信頼性係数が徐々に大きくなるように設される。このような推定勾配信頼度に対するフィードバック用信頼性係数の関係が異なるマップを複数用意し、フィードフォワード演算で演算した要求車軸トルクと補正後推定勾配トルクに基づいて、具体的にはこれらの絶対値の比率に基づいて、マップを選択することでフィードバック用信頼性係数を補正することができる。
【0069】
図10の例では、平坦路を規定の速度で定常走行している状態での要求車軸トルクの絶対値に対する補正後推定勾配トルクの絶対値の比率を基準値として、演算した比率が基準値から規定の範囲にある場合は図10の実線で示されたマップを用いる。ここで、走行路面の路面傾斜が大きくなるなどして、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率が基準値から規定の範囲より大きくなったときは、推定勾配信頼度に対するフィードバック用信頼性係数が基準値のマップに比べ大きくなるように設定された図10の実線より上の破線に示されるマップを選択する。一方、定常走行から加速走行に移るなどして、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率が基準値から規定の範囲より小さくなったときは、推定勾配信頼度に対するフィードバック用信頼性係数が基準値のマップに比べ小さくなるように設定された図10の実線より下の破線に示されるマップを選択する。
【0070】
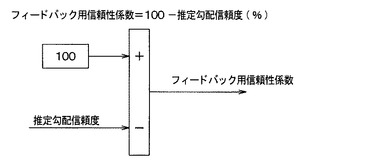
図11は、推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。この図に示されるように、四則演算を用いる場合、例えば、得られた推定勾配信頼度の逆数(=100/推定勾配信頼度(%))を算出することにより、フィードバック用信頼性係数とすることができる。
【0071】
さらに、推定勾配信頼度に加え、フィードフォワード演算で演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率に基づいてフィードバック用信頼性係数を補正しても良い。これにより、推定勾配トルクの影響度と信頼度の両方に応じて、最適のフィードバック用信頼性係数を設定することができる。
【0072】
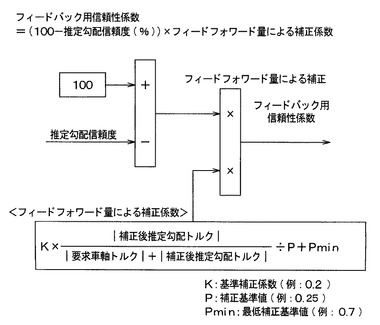
例えば、図12に示すように、基準補正係数K、補正基準値P、要求車軸トルク、補正後推定勾配トルクを用いた次の数式2に示す補正係数演算式を用いて演算した補正係数をフィードバック用信頼性係数に掛けることで補正を行うことができる。
【0073】
(数2)
補正係数=K×(|補正後推定勾配トルク|/(|要求車軸トルク|+|補正後推定勾配トルク|)/P)+最低補正基準値
ここで、基準補正係数K、および補正基準値Pは、走行実験やシミュレーションの結果から最適値を設定することが可能である。
【0074】
仮に基準補正係数Kを0.2、補正基準値Pを0.25、要求車軸トルクが2000Nmの場合、想定勾配トルク補正後が200Nmの緩斜面を走行した場合は、上記数式2より、補正係数は、0.2×((200/2000)/0.25)+0.7=0.78と求められる。また、推定勾配トルク補正後が1000Nmの急斜面を走行した場合は、補正係数は、上記数式2より、0.2×((1000/2000)/0.25)+0.7=1.5と求められる。
【0075】
このように、数式2を用いて補正係数を演算し、この補正係数をフィードバック用信頼性係数に掛けることで補正することにより、要求車軸トルクの絶対値に対する補正後推定勾配トルクの絶対値の比率が小さいときに比べ大きいときの方が、フィードバック用信頼性係数が高くなるように補正することができる。
【0076】
なお、フィードバック用信頼性係数の補正係数は、要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率ごとに補正係数演算式を使って演算した演算結果を予め補正係数マップとして記憶し、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率と、補正係数マップからフィードバック用信頼性係数の補正係数を求めるようにしても良い。
【0077】
また、補正されるフィードバック用信頼性係数は図12に示すように四則演算を用いて算出することに限らず、図9のような推定勾配信頼度に対するフィードバック用信頼性係数の関係を示すマップから求めても良い。
【0078】
このように、推定勾配信頼度が低下するほどフィードバック用信頼性係数が大きな値に設定される。
【0079】
乗算器3icは、フィードバック用信頼性係数算出部3ibで求められたフィードバック用信頼性係数とフィードバック制御器3fで演算されたフィードバックトルクとを掛け合わせることにより、フィードバックトルクを補正する。このとき、フィードバック用信頼性係数が推定勾配信頼度に対応した重み付け量とされているため、フィードバックトルクの補正の度合いは、推定勾配信頼度が低いほど大きくなり、推定勾配信頼度が高いほど小さくなる。このようにして、推定勾配信頼度の低下に応じてフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。
【0080】
次に、推定勾配トルク補正部3kによる推定勾配トルクの補正方法について説明する。上述したように、トルク変換部3jにおいて、推定勾配に応じて発生する推定勾配加速度をトルク変換することで推定勾配トルクを演算しているが、推定勾配加速度は推定勾配信頼度に応じた精度となっている。このため、推定勾配加速度からトルク変換した推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対して推定勾配信頼度に応じた補正を行う。具体的には、推定勾配信頼度の低下に合せて推定勾配トルクの絶対値が小さくなるようにすることで、推定勾配トルクの関与する割合を減らし、推定勾配の誤差の影響を小さくする。これにより、フィードフォワードトルクの精度低下を防ぐ。
【0081】
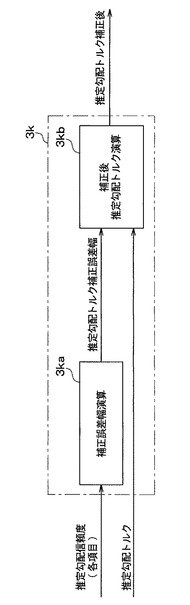
図13は、推定勾配トルク補正部3kの内部構造を模式的に示したブロック図である。この図に示されるように、推定勾配トルク補正部3kには、補正誤差幅演算部3ka、補正後推定勾配トルク算出部3kbが備えられている。
【0082】
補正誤差幅演算部3kaは、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度に基づいて、各項目別の誤差幅を求めると共に、各項目すべてに対応する誤差幅を足し合わせることにより、総合的な誤差幅を演算する。誤差幅とは、各項目別に予め実験などによって調べておいた推定勾配トルク(推定勾配加速度)の誤差の許容範囲であり、許容範囲内の誤差幅であれば推定勾配トルクの補正を行う程の必要がないことを意味している。
【0083】
各項目別に推定勾配信頼度が求められているが、各項目別に推定勾配トルクの誤差の許容範囲は異なっているため、補正誤差幅演算部3kaでは、各項目別に誤差幅を求めることにより各項目に対応して想定される誤差の許容範囲を演算する。そして、演算した各誤差幅の総和を取ることで、各項目すべてを考慮したときの推定勾配トルクの誤差幅を演算し、誤差幅以内であれば推定勾配トルクの誤差として許容範囲内であるとして、推定勾配トルクの補正を行わない不感帯を設定すると共に、その許容範囲外であれば推定勾配トルクの補正を行う。このように、推定勾配トルクを誤差幅に応じて補正すれば、誤差幅を検証した上で推定勾配トルクを小さくする範囲を決めることができるため、適切な補正量で推定勾配トルクを補正することができる。
【0084】
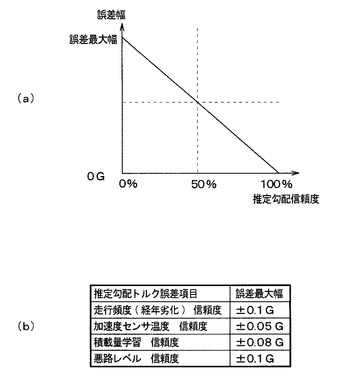
図14(a)は、各項目別の誤差幅の演算に用いる推定勾配信頼度と誤差幅の関係を示したマップであり、図14(b)は、各項目別の誤差最大幅を示した図表である。
【0085】
図14(a)に示されるように、例えば推定勾配信頼度が0%のときを誤差最大幅に設定すると共に、推定勾配信頼度が100%のときを誤差幅0に設定し、推定勾配信頼度が低下するほど誤差幅が誤差最大幅に近づくマップとなっている。このマップの誤差最大幅に対して、図14(b)に示される各項目別の誤差最大幅を代入し、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度と対応する誤差幅をマップから選択する。例えば、経年劣化に対応する推定勾配信頼度が20%であれば、経年劣化に対応する誤差最大幅0.1G×(1−20%/100%)=0.08Gが経年劣化に対応する誤差幅となる。
【0086】
このようにして各項目別の誤差幅を演算し、各項目別の誤差幅の総和を求める。例えば、経年劣化に対応する推定勾配信頼度が20%のときの誤差幅0.08Gと、加速度センサ温度に対応する推定勾配信頼度が0%のときの誤差幅0.05Gと、積載量学習に対応する推定勾配信頼度が100%のときの誤差幅0.00Gと、悪路レベルに対応する推定勾配信頼度が0%のときの誤差幅0.00Gとの総和は、0.13Gとなる。この値が、各項目すべてを考慮した総合的な誤差幅となる。
【0087】
補正後推定勾配トルク算出部3kbは、補正誤差幅演算部3kaで演算された総合的な誤差幅に基づいて補正後推定勾配トルクを演算する。例えば、補正後推定勾配トルクを次式にて演算している。
【0088】
(数3)
補正後推定勾配トルク=推定勾配トルク−誤差幅
ただし、|推定勾配トルク|≧|誤差幅|の場合にのみ、上記数式により補正後推定勾配トルクの演算を行う。また、路面が上り坂であるか下り坂になるかによって加速度の符号の正負が変わり、推定勾配トルクの符号も加速度の正負の符号と対応するものとなるため、誤差幅の符号も推定勾配トルクの符号と同じ符号とする。また、|推定勾配トルク|<|誤差幅|の場合は、補正後勾配トルクを0にする。
【0089】
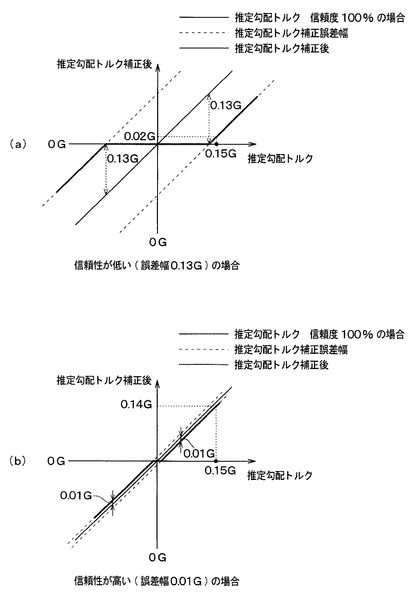
このようにして補正後推定勾配トルクを演算する場合の具体例について、図15を参照して説明する。図15(a)、(b)は、それぞれ、推定勾配信頼度が低い場合(誤差幅0.13G)と高い場合(誤差幅0.01G)の推定勾配トルクと補正後推定勾配トルクの関係を示したグラフである。
【0090】
図15(a)に示されるように、誤差幅が0.13と推定勾配信頼度が低い場合には、推定勾配トルクの補正を行わなくても良い許容範囲が広くなる。このため、例えば、トルク変換部3jから入力された推定勾配トルクが0.15Gであったとしても、誤差幅0.13G分が差し引かれるため、補正後推定勾配トルクは0.02Gと小さな値になる。これに対し、誤差幅0.01と推定勾配信頼度が高い場合には、推定勾配トルクの補正を行わなくても良い許容範囲が狭くなる。このため、例えば、トルク変換部3jから入力された推定勾配トルクが0.15Gであれば、誤差幅0.01G分が差し引かれても、補正後推定勾配トルクが0.14Gと大きな値になる。
【0091】
すなわち、推定勾配信頼度が低ければ、仮に推定勾配トルクが大きな値であったとしても、誤差幅が大きいため、その誤差幅を見込んだ小さな値の補正後推定勾配トルクが演算される。逆に、推定勾配信頼度が高ければ、推定勾配トルクの誤差幅が小さいため、あまり補正されることなく補正後推定勾配トルクが演算される。
【0092】
このようにして、推定勾配信頼度を加味した補正後推定勾配トルクが演算されるため、フィードフォワード制御器3cでは、この補正後推定勾配トルクを用いて、次式によりフィードフォワードトルクが演算されることになる。
【0093】
(数4)
フィードフォワードトルク=要求車軸トルク−補正後推定勾配トルク
このようにして本実施形態の車両制駆動力制御システムが構成されている。このように構成された車両制駆動力制御システムでは、加速度要求部1から出力される車両状態に応じた加速度の要求信号に基づいて調停器2がアプリ加速度要求および要求ジャーク制限値を発生させる。また、前後方向制御部3がアプリ加速度要求および要求ジャーク制限値に基づき要求車軸トルクに対するフィードフォワード制御およびフィードバック制御を行いながら要求パワトレトルクおよび要求ブレーキトルクを演算する。そして、要求パワトレトルクに基づいてパワトレ制御部4からエンジンに対するトルク要求値(要求エンジントルク)や自動変速装置に対するギア比の要求値(要求ギア比)を出力することで、エンジン出力および変速制御が行われる。また、要求ブレーキトルクに基づいてブレーキ制御部5がブレーキ制御用のアクチュエータが発生させるホイールシリンダ圧の要求値を出力する。これにより、制駆動力配分に応じた駆動力および制動力が発生させられ、所望の加速度を得ることができる。
【0094】
以上説明した本実施形態の車両制駆動力制御システムによれば以下の効果を得ることができる。
【0095】
すなわち、本実施形態の車両制駆動力制御システムでは、推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正している。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。
【0096】
したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【0097】
さらに、推定勾配、具体的には推定勾配に相当する物理量である推定勾配加速度をトルク変換した推定勾配トルクを推定勾配信頼度に応じて補正し、補正後推定勾配トルクを用いてフィードフォワードトルクを演算している。このように、推定勾配加速度からトルク変換した推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対して推定勾配信頼度に応じた補正を行うことで、フィードフォワードトルク自身の精度低下も防ぐことが可能となる。
【0098】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してフィードバック制御器3fの出力に対するフィードバックトルク補正部3iによる補正手法を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0099】
図16は、本実施形態にかかる車両制駆動力制御システムのフィードバック制御器3fおよびフィードバックトルク補正部3iの構造例を示したブロック図である。なお、本図ではトルク変換部3gについては省略してあるが、フィードバック制御器3fの出力をトルク換算しても良いし、フィードバックトルク補正部3iでトルク変換前のフィードバック用の加速度を補正し、その後、それをトルク変換する形態としても良い。
【0100】
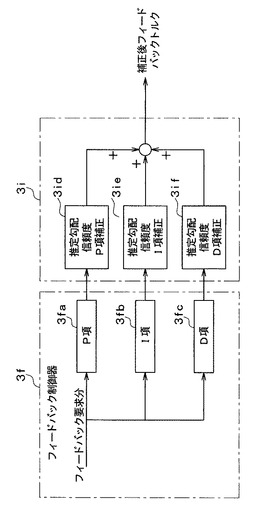
この図に示されるように、フィードバック制御器3fは、PID制御によってフィードバック制御を行うものであり、規範モデル記憶部3dで設定された要求加速度から実加速度を減算することによって得られる加速度偏差に対してP項3fa、I項3fb、D項3fcそれぞれでフィードバックトルクを算出する。そして、本実施形態では、このフィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcそれぞれで算出された各フィードバックトルクに対して、フィードバックトルク補正部3iによる補正を行う。
【0101】
具体的には、本実施形態では、フィードバックトルク補正部3iを推定勾配信頼度P項補正部3id、推定勾配信頼度I項補正部3ie、推定勾配信頼度D項補正部3ifに分けている。各項補正部3id〜3ifは、各項それぞれに対応した信頼度を設定している。各項補正部3id〜3ifの内部構成については、例えば第1実施形態で説明した図8と同様の構成とされるが、推定勾配信頼性の関係項目の内容や信頼度の振り分け方などを各項3fa〜3fcの特性に応じて変更している。
【0102】
このように、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcそれぞれのフィードバックトルクに対して別々に設定されたフィードバック用補正係数を掛けて補正することもできる。そして、これら各項の補正後のフィードバックトルクを足し合わせることにより、フィードバックトルク補正部3i全体としての補正後のフィードバックトルクを得ることができる。
【0103】
このように、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcの各項で演算されたフィードバックトルクを別々に補正することもできる。このようにすれば、例えば応答性重視にするなど、各項の特性に合せて各項のフィードバックトルクを補正することができる。
【0104】
(他の実施形態)
(1)上記実施形態では、規範モデル記憶部3dやフィードバック制御器3fおよびトルク変換部3gをパワトレトルクとブレーキトルクのフィードバック制御の双方を行うものとして使用したが、これらをパワトレトルクのフィードバック制御用とブレーキトルクのフィードバック制御用に別々に備えていても良い。
【0105】
(2)上記第1実施形態では、フィードバックトルク補正部3iにてフィードバック制御器3f全体としての出力に対してフィードバック用信頼性係数を掛けることで補正後のフィードバックトルクを求めた。一方、第2実施形態では、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcの各項で演算されたフィードバックトルクを各項補正部3id〜3ifで別々に設定されたフィードバック用補正係数を掛けることで補正し、補正後のフィードバックトルクを求めた。
【0106】
これに対し、これらを組み合わせてフィードバックトルクの補正を行うようにしても良い。すなわち、第2実施形態のように各項で演算されたフィードバックトルクを別々に補正したのち、各項の補正後のフィードバックトルクを足し合わせ、その後さらに、第1実施形態のようにフィードバック用信頼性係数を掛けることで補正を行うことにより、最終的な補正後のフィードバックトルクを求めるようにしても良い。
【0107】
(3)また、上記各実施形態では、推定勾配信頼度の算出に経年劣化、加速度センサ温度、積載状態、悪路レベルを例に挙げて説明したが、その他にも、推定勾配信頼度を変化させる要因となるパラメータに基づいて推定勾配信頼度を算出することもできる。
【0108】
(4)フィードフォワード制御を行うために入力される要求トルクとして要求車軸トルクを用いると共に要求車軸トルクを示す所定のパラメータとして加速度を用いている。また、フィードバック制御が行われる所定のパラメータとして加速度を用いている。しかしながら、フィードフォワード制御とフィードバック制御が共に行われるような前後加速度制御装置において、所定のパラメータとして他のものが用いられているような場合においても、本発明を適用することが可能である。
【0109】
ただし、推定勾配の誤差の発生により、駆動と制動の交互の断続的作動を招き易くなる。このため、要求車軸トルクと路面勾配トルクとからフィードフォワードトルクを演算し、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させるような前後加速度制御装置に対して、上記各請求項に記載の発明を適用すると特に効果が大きい。
【符号の説明】
【0110】
1…加速度要求部、2…調停器、3…前後方向制御部、3a…ジャーク制御部、3b…トルク変換部、3c…フィードフォワード制御器、3d…規範モデル記憶部、3e…微分器、3f…フィードバック制御器、3g…トルク変換部、3h…推定勾配信頼度算出部、3i…フィードバックトルク補正部、3j…トルク変換部、3k…推定勾配トルク補正部、3m…分配器、4…パワトレ制御部、5…ブレーキ制御部
【技術分野】
【0001】
本発明は、フィードフォワード制御およびフィードバック制御により、要求される車両の前後方向の加速度が得られるようにする前後加速度制御装置に関するものである。
【背景技術】
【0002】
従来、車両の前後方向の加速度を所望の車両加速度に自動的に調整することができる装置として、特許文献1に示される車両走行制御装置がある。この特許文献1の車両走行制御装置では、スリップの発生を確実に抑制して車両を自動走行させる。この自動走行では、車輪の接地荷重や路面の摩擦係数に基づき、車輪に付与した際に車輪にスリップが生じない許容トルクを演算すると共に、演算された許容トルクを車輪に付与した場合に車両に作用させ得る制限加速度を求め、制限加速度と要求加速度との比較結果に基づき、現実に車両に作用させる加速度に対応するフィードフォワードトルクを求めている。
【0003】
そして、各車輪の接地荷重が路面勾配によって変化し、例えば、登り勾配においては前輪荷重が減少して後輪荷重が増加し、下り勾配ではその逆となることから、路面勾配によって求まる動的な荷重配分をも考慮して車輪の接地荷重を求めることで、各種の路面状態に対応した車両の自動走行が行えるようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−051310号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したフィードフォワードトルクは、要求加速度に対応する要求トルクと路面勾配に対応した接地荷重に含まれる推定勾配トルクとを足し合わせることにより算出される。このため、何らかの要因によって推定勾配トルクの算出精度が低下すれば、それだけフィードフォワードトルクの精度も低下するという問題がある。
【0006】
本発明は上記点に鑑みて、推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できる前後加速度制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、フィードフォワード制御器(3c)から出力されるフィードフォワードトルクとフィードバック制御器(3f)から出力されるフィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置において、推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて、フィードバック制御器のゲインを高くする補正を行うことで、フィードバックトルクを補正するフィードバックトルク補正部(3i)とを備えることを特徴としている。
【0008】
このように、推定勾配信頼度を演算すると共に、推定勾配信頼度の低下に応じてフィードバック制御器のゲインが高くなるようにする補正を行っている。これにより、推定勾配信頼度に応じて補正したフィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【0009】
請求項2に記載の発明では、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、フィードフォワード制御器は、推定勾配トルク補正部にて補正された後の推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴としている。
【0010】
請求項2に記載の発明では、推定勾配信頼度算出部にて算出された推定勾配信頼度の低下に応じて推定勾配トルク補正部(3k)を有し、フィードフォワード制御器は、推定勾配トルク補正部にて補正された後の推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴としている。
【0011】
このように推定勾配トルクを推定勾配信頼度に応じて補正し、補正後の推定勾配トルクを用いてフィードフォワードトルクを演算している。この場合、推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対しても推定勾配信頼度に応じた補正を行うことで、フィードフォワードトルク自身の精度低下を抑制し、フィードフォワード制御の精度低下を小さくすることが可能となる。
【0012】
例えば請求項3に記載したように、請求項1に示される前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下応じて、前記推定勾配トルクを補正する推定勾配トルク補正部(3k)に加え、前記推定勾配トルク補正部にて補正された後の前期推定勾配トルクに基づいて前記フィードフォワードトルクを算出するフィードフォワード制御器の両方を具備するようにしても良い。
【0013】
この場合、フィードフォワードトルク自身の精度低下を小さくすることに加え、フィードバック側で残った誤差を反映した実加速度などの実値を取得して補正するため、フィードフォワードトルクの補正のみを行った場合に対し精度よく補正することができ、フィードフォワード制御の精度低下を確実に抑制することができる。
【0014】
例えば、請求項4に記載したように、推定勾配トルク補正部にて、推定勾配信頼度算出部が算出した推定勾配信頼度の低下に応じて、推定勾配トルクの絶対値が小さくなるように、該推定勾配トルクを補正することができる。
【0015】
このように、推定勾配信頼度の低下に合せて推定勾配トルクの絶対値が小さくなるようにすれば、推定勾配トルクの関与する割合を減らすことができ、推定勾配の誤差の影響を小さくすることができる。
【0016】
また、請求項5に記載したように、推定勾配トルク補正部にて、推定勾配信頼度算出部が算出した推定勾配信頼度の低下に応じて、推定勾配トルクの誤差幅を算出し、推定勾配トルクを誤差幅に応じて補正することもできる。
【0017】
このように、推定勾配トルクを誤差幅に応じて補正すれば、誤差幅を検証した上で推定勾配トルクを小さくする範囲を決めることができるため、適切な補正量で推定勾配トルクを補正することができる。
【0018】
さらに、請求項6に記載したように、フィードバックトルク補正部では、推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を備えておき、該マップもしくは関数式に基づいて、算出された推定勾配信頼度に対応するフィードバック用信頼性係数を求めると共に、該フィードバック用信頼性係数に基づいてフィードバックトルクを補正することができる。
【0019】
このように、シミュレーションや実車走行などで求めた推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を用いてフィードバック用信頼性係数を求めることで、フィードバックトルクを適正に補正することができる。
【0020】
さらに、請求項7に記載したようにフィードバックトルク補正部は、要求車軸トルクと補正後推定勾配トルクに基づいて、例えばこれらの絶対値の比率に基づいて、推定勾配信頼度に対応するフィードバック用信頼性係数を求めるようにして、推定勾配トルクの影響度と信頼度の両方に応じて、フィードバックトルクを補正することができる。
【0021】
請求項8に示したように、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合が小さい場合よりも大きい場合のほうが、推定勾配信頼度に対するフィードバック用信頼性係数が大きくなるように補正することで、フィードバックトルクを適切に補正することができる。
【0022】
また、推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップを用いてフィードバック用信頼性係数を求める場合は、請求項9に記載したように、フィードバックトルク補正部は、推定勾配信頼度とフィードバック用信頼性係数との関係が異なるマップを複数有し、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合によってマップを選択し、要求車軸トルクの絶対値に対する勾配トルク絶対値の割合が小さい場合に選択されるマップ対し、大きい場合に選択されるマップの方が、推定勾配信頼度に対するフィードバック用信頼性係数が大きくなるように推定勾配信頼度とフィードバック用信頼性係数との関係を設定することで、複雑な演算を行うことなくフィードバック用信頼性係数を補正することができる。
【0023】
例えば、請求項10に記載したように、推定勾配トルクとして、路面勾配によって車両に発生する前後方向の加速度である推定路面加速度をトルク換算したものを用いることができ、フィードバック制御器にて、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させ、フィードフォワード制御器にて、要求トルクに相当する車両の前後方向の加速度の制御を行うための要求車軸トルクと、推定勾配トルクを推定勾配トルク補正部によって補正した補正後推定勾配トルクとからフィードフォワードトルクを演算することができる。
【0024】
推定勾配の誤差の発生により、駆動と制動の交互の断続的作動を招き易くなる。このため、要求車軸トルクと路面勾配トルクとからフィードフォワードトルクを演算し、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させるような前後加速度制御装置に対して、上記各請求項に記載の発明を適用すると特に効果が大きい。
【0025】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態にかかる車両制駆動力制御システムのブロック図である。
【図2】前後方向制御部3の内部構造を模式的に示したブロック図である。
【図3】推定勾配信頼度算出部3hの内部構造を模式的に示したブロック図である。
【図4】経年劣化と推定勾配信頼度との関係の一例を示した図である。
【図5】加速度センサ温度と推定勾配信頼度の関係の一例を示した図である。
【図6】積載量の学習の度合いと推定勾配信頼度との関係の一例を示した図である。
【図7】悪路レベルと推定勾配信頼度との関係の一例を示した図である。
【図8】フィードバックトルク補正部3iの内部構造を模式的に示したブロック図である。
【図9】推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。
【図10】推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。
【図11】推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。
【図12】推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。
【図13】推定勾配トルク補正部3kの内部構造を模式的に示したブロック図である。
【図14】(a)は、各項目別の誤差幅の演算に用いる推定勾配信頼度と誤差幅の関係を示したマップであり、(b)は、各項目別の誤差最大幅を示した図表である。
【図15】推定勾配信頼度が低い場合(誤差幅0.13G)と高い場合(誤差幅0.01G)の推定勾配トルクと補正後推定勾配トルクの関係を示したグラフである。
【図16】本発明の第2実施形態にかかる車両制駆動力制御システムのフィードバック制御器3fおよびフィードバックトルク補正部3iの構造例を示したブロック図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0028】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、本発明の一実施形態における前後加速度制御装置が適用された車両制駆動力制御システムを例に挙げて、本発明の前後加速度制御装置について説明する。
【0029】
図1は、車両制駆動力制御システムのブロック図である。この図に示されるように、車両制駆動力制御システムは、加速度要求部1、調停器2、前後方向制御部3、パワトレ制御部4およびブレーキ制御部5を有している。これらのうちの前後方向制御部3が前後加速度制御装置に相当する。
【0030】
加速度要求部1は、車両前後加速度制御を行う各アプリケーションからの要求に従って、車両状態に応じた加速度の要求信号を出力する。本実施形態の場合、加速度要求部1は、各アプリケーションを実行するクルーズコントロール部1a、車間制御部1b、プリクラッシュコントロール部1cを備えている。クルーズコントロール部1aは、車両の走行速度を一定値に制御するために必要な加速度の要求信号を出力する。車間制御部1bは、前方車両との車間距離が予め決められた値となるようにするために必要な加速度の要求信号を出力する。プリクラッシュコントロール部1cは、前方車両との衝突を回避するために必要な加速度の要求信号を出力する。
【0031】
調停器2は、加速度要求部1から入力される要求信号が示す加速度を調停し、一制御周期内での加速度の要求値の変化量、つまり車両前後方向における要求加速度の微分値であるジャークをアプリ加速度要求として出力する。また、調停器2は、車両状態に応じたジャークの制限値を演算し、要求ジャーク制限値として出力する。
【0032】
前後方向制御部3は、調停器2が出力するアプリ加速度要求および要求ジャーク制限値を受け取ると共に、実車速、経年劣化、加速度(加速度センサ値)、加速度センサ温度、積載状態、悪路レベルなどに関するデータを受け取ることで、要求パワトレトルクおよび要求ブレーキトルクを求める。例えば、実車速に関するデータについては、図示しないメータECU等から受け取ることができる。加速度や加速度センサ温度に関するデータについては、図示しない温度検出機能付き加速度センサから受け取ることができる。経年劣化に関するデータについては、加速度センサへの通電を制御する図示しないECU等から受け取ることができる。積載情報については、ヘッドライト調整等で用いられている車高センサの検出信号もしくはエンジントルクと実加速度との関係に基づいて積載量の演算を行っているECU等から受け取ることができる。悪路レベルに関するデータについては、図示しないブレーキECU等から受け取ることができる。
【0033】
具体的には、前後方向制御部3は、アプリ加速度要求、要求ジャーク制限値、および、受け取った上記各データに基づいてフィードフォワード制御およびフィードバック制御を行い、要求パワトレトルクおよび要求ブレーキトルクを求める。図2は、この前後方向制御部3の内部構造を模式的に示したブロック図である。
【0034】
図2に示されるように、前後方向制御部3は、ジャーク制御部3a、トルク変換部3b、フィードフォワード制御器3c、規範モデル記憶部3d、微分器3e、フィードバック制御器3f、トルク変換部3g、推定勾配信頼度算出部3h、フィードバックトルク補正部3i、トルク変換部3j、推定勾配トルク補正部3kおよび分配器3mを有している。
【0035】
ジャーク制御部3aは、調停器2が出力するアプリ加速度要求に対応する要求加速度を演算する。このとき、ジャーク制御部3aは、調停器2が出力する要求ジャーク制限値にて加速度変化量を制限しつつ要求加速度を演算する。例えばアプリ加速度要求が車両を加速させる要求、つまり正の値であれば要求加速度は正の値となり、逆にアプリ加速度要求が車両を減速させる要求、つまり負の値であれば要求加速度は負の値となる。
【0036】
トルク変換部3bは、ジャーク制御部3aで演算された要求加速度をトルク換算し、要求加速度と対応する要求車軸トルクに変換する。加速度と車軸トルクとの関係は、車両の運動方程式および車両諸元から予め求められており、その関係に基づいて要求加速度のトルク換算を行っている。
【0037】
フィードフォワード制御器3cは、実際の加速度がアプリ加速度要求に近づくようにフィードフォワード制御を行う。具体的には、フィードフォワード制御器3cは、トルク変換部3bから出力される要求車軸トルクと、後述する推定勾配トルク補正部3kで演算された補正後推定勾配トルクに基づき、入力された要求車軸トルクに対して入力された補正後推定勾配トルクを加算することにより、フィードフォワードトルクを演算する。なお、ここでは図示していないが、フィードフォワード制御器3cには、推定ブレーキトルクや推定パワトレトルクも入力されており、これらに基づいてフィードフォワードトルクとして、パワトレフィードフォワードトルクやブレーキフィードフォワードトルクを演算している。
【0038】
規範モデル記憶部3dは、フィードバック制御を行うための規範モデルを記憶しており、規範モデルに従い、入力された要求加速度に対応した規範モデルから求められる要求加速度を設定する。ここで用いられる規範モデルは車両特性などに合せて個々に設定される。規範モデルとしては、パワトレ規範モデルやブレーキ規範モデルがあり、パワトレ規範モデルに基づいて要求パワトレ加速度を設定し、ブレーキ規範モデルに基づいて要求ブレーキ加速度を設定している。
【0039】
微分器3eは、データ入力された実車速を微分することにより、実際に発生した加速度(以下、実加速度という)を演算する。実車速に関するデータについては、例えば図示しないメータECU等から車内LANを通じて入力することができる。なお、ここでは微分器3eにて実加速度を演算するようにしているが、図示しない他のECU等において既に実加速度が演算されている場合には、その演算結果が前後方向制御部3に入力されるようにしても良い。
【0040】
フィードバック制御器3fは、実加速度が要求加速度に近づくようにフィードバック制御を行う。具体的には、フィードバック制御器3fは、規範モデル記憶部3dで設定された要求加速度から実加速度を減算することによって得られる加速度偏差が0に近づくようにフィードバック用要求加速度、すなわちパワトレフィードバック要求加速度やブレーキフィードバック要求加速度を演算する。このフィードバック用要求加速度の演算手法については、一般的なフィードバック制御の演算で用いられるようなPID制御等を用いることができる。
【0041】
トルク変換部3gは、フィードバック制御器3fで演算されたフィードバック用要求加速度をトルク換算し、フィードバック用要求加速度と対応するフィードバックトルクを求める。これにより、パワトレフィードバック要求加速度やブレーキフィードバック要求加速度がトルク換算され、パワトレフィードバックトルクやブレーキフィードバックトルクが演算される。
【0042】
推定勾配信頼度算出部3hは、データ入力された経年劣化、加速度センサ温度、積載状態、悪路レベルに基づいて推定勾配信頼度を算出する。この推定勾配信頼度の算出方法については、後で詳細に説明する。
【0043】
フィードバックトルク補正部3iは、推定勾配信頼度算出部3hで算出された推定勾配信頼度に基づいて、トルク変換部3gでトルク変換されたフィードバックトルクを補正し、補正後フィードバックトルクを演算する。この補正後フィードバックトルクの演算方法についても、後で詳細に説明する。
【0044】
トルク変換部3jは、加速度センサから入力された加速度(加速度センサ値)と微分器3eで演算された実加速度との偏差、つまり路面勾配に応じて発生する重力成分の加速度(以下、推定勾配加速度という)をトルク換算することで、推定勾配トルクを演算する。
【0045】
推定勾配トルク補正部3kは、推定勾配信頼度算出部3hで算出された推定勾配信頼度に基づいて、トルク変換部3jでトルク変換された推定勾配トルクを補正し、補正後推定勾配トルクを演算する。この補正後推定勾配トルクについても、後で詳細に説明する。
【0046】
分配器3mは、フィードバックトルク補正部3iで求められた補正後のフィードバックトルクと、フィードフォワード制御器3cで演算されたフィードフォワードトルクとの加算値から実際に出力する制駆動力配分を設定する。この制駆動力配分が、要求パワトレトルクと要求ブレーキトルクとしてパワトレ制御部4およびブレーキ制御部5に伝えられる。
【0047】
パワトレ制御部4は、パワトレECU等により構成されるもので、要求パワトレトルクに応じて、エンジンに対するトルク要求値(要求エンジントルク)や自動変速装置に対するギア比の要求値(要求ギア比)を出力する。ブレーキ制御部5は、ブレーキECU等により構成されるもので、要求ブレーキトルクに応じて、ブレーキ制御用のアクチュエータが発生させるホイールシリンダ圧の要求値を出力する。これにより、制駆動力配分に応じた駆動力および制動力が発生させられ、所望の加速度を得ることができる。
【0048】
次に、上記のように構成された車両制駆動力制御システムにおける推定勾配信頼度算出部3h、フィードバックトルク補正部3iおよび推定勾配トルク補正部3kによる推定勾配信頼度の算出方法やフィードバックトルクおよび推定勾配トルクの補正方法について説明する。
【0049】
まず、推定勾配信頼度算出部3hによる推定勾配信頼度の算出方法について説明する。上述したように、推定勾配信頼度は、データ入力された経年劣化、加速度センサ温度、積載状態、悪路レベルに基づいて算出される。推定勾配信頼度は、様々な要因によって変化するが、その要因として経年劣化、加速度センサ温度、積載状態、悪路レベルが挙げられる。このため、これらに基づいて推定勾配信頼度を算出する。
【0050】
図3は、推定勾配信頼度算出部3hの内部構造を模式的に示したブロック図である。この図に示されるように、推定勾配信頼度算出部3hでは、推定勾配の信頼性に影響を与える外乱要因について調べ、それに応じた推定勾配信頼度を得る。本実施形態では、推定勾配信頼度算出部3hは、推定勾配信頼度の関連項目に対応する各種状態、初期状態および信頼度のマップを有しており、各項目ごとの信頼度を選択して出力する。
【0051】
具体的には、図3中に示したように、推定勾配信頼度の関連項目としては、経年劣化、加速度センサ温度、積載状態、悪路レベルなどがある。
【0052】
経年劣化については、経年劣化が大きいほど推定勾配信頼度が低くなる関係となる。 図4は、経年劣化と推定勾配信頼度との関係の一例を示した図である。この図に示されるように、経年劣化係数が例えば0.5までは推定勾配信頼度を100%とし、それを超えると、経年劣化係数が大きくなるほど推定勾配信頼度が低下するような関係とすることができる。経年劣化は、様々な要因をパラメータとして定義されるが、例えば、経年劣化を数値化した経年劣化係数は、以下のような数式で表される。
【0053】
(数1)
経年劣化係数=通電劣化係数×通電時間+走行距離劣化係数×走行距離+経過時間劣化係数+経過時間
ここで、通電劣化係数とは、加速度センサへの通電による劣化を表す係数である。走行距離劣化係数とは、車両の走行距離に応じた加速度センサの劣化を表す係数である。経過時間劣化係数とは、加速度センサの新品の状態からの経過時間に応じた劣化を表す係数である。これら各係数は、加速度センサの種類や車両への加速度センサの搭載位置等によって異なる。通電時間は加速度センサへ通電を行ったトータルの時間であり、イグニッションスイッチがオンされていた時間を算出することで求められる。走行距離は、ODOメータの積算距離に関するデータをメータECUから受け取ることにより求められる。経過時間は、加速度センサの製造からの経過時間を想定し、ナビゲーションシステムにて最初の起動時間からの経過時間を計測させておき、そのデータを受け取ることにより求められる。
【0054】
例えば、通電劣化係数を0.1、走行距離劣化係数を0.05、経過時間劣化係数を0.02とし、通電時間については1000Hを1、走行距離については1万kmを1、経過時間については1年を1として経年劣化係数が演算される。通電時間1000H、走行距離5万km、経過時間5年であれば、経年劣化係数は0.45(=0.1×1+0.05×5+0.02×5)となる。よって、この場合には、経年劣化に対する推定勾配信頼度は100%となる。
【0055】
加速度センサ温度については、常温近辺においては推定勾配信頼度が高いが、温度が低くなればなるほど、また、温度が高くなればなるほど、推定勾配信頼度が低くなる。このため、初期値を0℃とし、加速度センサ温度に応じて推定勾配信頼度を100〜0%に設定している。
【0056】
図5は、加速度センサ温度と推定勾配信頼度の関係の一例を示した図である。この図に示されるように、車両の使用環境、つまり加速度センサの搭載場所の温度として想定される温度を例えば−40℃〜120℃、常温(例えば27℃)を信頼度100%とし、そこを中心として、温度が低くなるほど、または、温度が高くなるほど、徐々に信頼度が低下するように設定することができる。このような加速度センサ温度と推定勾配信頼度との関係は、加速度センサの温度特性を予め実験によって調べておくことによって求めることができる。
【0057】
積載状態については、積載量の学習の度合いによって推定勾配信頼度が変化し、その度合いが高くなればなるほど推定勾配信頼度も高くなる。このため、積載量の学習の度合いの初期値を0%とし、その度合い100〜0%に対応して推定勾配信頼度を100〜0%に設定している。
【0058】
図6は、積載量の学習の度合いと推定勾配信頼度との関係の一例を示した図である。この図に示されるように、積載量の学習の度合いに比例して推定勾配信頼度を高くするようにしている。積載量の学習は、例えば、一度のイグニッションスイッチのオン毎に行われ、走行してからの時間などをパラメータとして、車高センサの検出信号もしくはエンジントルクと実加速度との関係等に基づいて積載量を演算すると共に、走行してからの経過時間を考慮した積載量の確からしさを学習の度合いとして表したものであるが、周知のものであるため、ここでは説明を省略する。
【0059】
悪路レベルについては、悪路レベルが大きいほど車輪の浮き上がりの影響などを受けて推定勾配信頼度を低下させることになる。このため、悪路レベルの初期値を小とし、悪路レベルが大きくなるほど推定勾配信頼度が低下するように、悪路レベルに対応して推定勾配信頼度を100〜0%に設定している。
【0060】
図7は、悪路レベルと推定勾配信頼度との関係の一例を示した図である。この図に示されるように、悪路レベルが大きくなるほど推定勾配信頼度が直線的に低下するようにすることができる。
【0061】
このようにして、推定勾配信頼度算出部3hにおいて、推定勾配信頼度の変動要因となる各項目別に、推定勾配信頼度が演算される。そして、この各項目毎の推定勾配信頼度がフィードバックトルク補正部3iおよび推定勾配トルク補正部3kに伝えられる。
【0062】
次に、フィードバックトルク補正部3iによるフィードバックトルクの補正方法について説明する。上述したように、フィードフォワード制御器3cは、要求車軸トルクに対して推定勾配トルクを足し合わせることによってフィードフォワードトルクを演算している。このため、推定勾配トルクの信頼度が低下すれば、フィードフォワードトルクの精度が低下する。したがって、フィードバックトルク補正部3iにより、推定勾配信頼度算出部3hで演算された推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完し、総合的に精度低下を防ぐ。
【0063】
図8は、フィードバックトルク補正部3iの内部構造を模式的に示したブロック図である。この図に示されるように、フィードバックトルク補正部3iには、乗算器3ia、フィードバック用信頼性係数算出部3ibおよび乗算器3icが備えられている。
【0064】
乗算器3iaは、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度を掛け合わせることにより、各項目すべてを考慮した総合的な推定勾配信頼度を演算する。
【0065】
フィードバック用信頼性係数算出部3ibは、総合的な推定勾配信頼度に基づいてフィードバック用信頼性係数を求める。フィードバック用信頼性係数は、推定勾配信頼度に対応してフィードバックトルクを補正するときの重み付け量に相当する。推定勾配信頼度に対するフィードバック用信頼性係数の関係は、例えばマップもしくは関数式(四則演算式)として予め記憶されており、それらを使用してフィードバック用信頼性係数を求めることができる。このマップや関数式はシミュレーションや実車走行などにより予め求めておくことができ、このようなマップもしくは関係式を用いてフィードバック用信頼性係数を求めることで、フィードバックトルクを適正に補正することができる。
【0066】
図9は、推定勾配信頼度に対するフィードバック用信頼性係数の関係の一例を示したマップである。この図に示されるように、推定勾配信頼度が100%のときにフィードバック用信頼性係数が最も小さな値となり、推定勾配信頼度が100%未満になるとフィードバック用信頼性係数が徐々に大きくなって、推定勾配信頼度が50%のときにフィードバック用信頼性係数が0.5、さらに推定勾配信頼度が低下するとフィードバック用信頼性係数が1に近づくような関係とすることができる。
【0067】
さらに、推定勾配信頼度に加え、フィードフォワード演算で演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率に基づいてフィードバック用信頼性係数を求めても良い。これにより、推定勾配トルクの影響度と信頼度の両方に応じて、最適のフィードバック用信頼性係数を設定することができる。
【0068】
例えば、推定勾配信頼度に対するフィードバック用信頼性係数の関係は、推定勾配信頼度が100%のときにフィードバック用信頼性係数が最も小さな値となり、推定勾配信頼度が100%未満になるとフィードバック用信頼性係数が徐々に大きくなるように設される。このような推定勾配信頼度に対するフィードバック用信頼性係数の関係が異なるマップを複数用意し、フィードフォワード演算で演算した要求車軸トルクと補正後推定勾配トルクに基づいて、具体的にはこれらの絶対値の比率に基づいて、マップを選択することでフィードバック用信頼性係数を補正することができる。
【0069】
図10の例では、平坦路を規定の速度で定常走行している状態での要求車軸トルクの絶対値に対する補正後推定勾配トルクの絶対値の比率を基準値として、演算した比率が基準値から規定の範囲にある場合は図10の実線で示されたマップを用いる。ここで、走行路面の路面傾斜が大きくなるなどして、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率が基準値から規定の範囲より大きくなったときは、推定勾配信頼度に対するフィードバック用信頼性係数が基準値のマップに比べ大きくなるように設定された図10の実線より上の破線に示されるマップを選択する。一方、定常走行から加速走行に移るなどして、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率が基準値から規定の範囲より小さくなったときは、推定勾配信頼度に対するフィードバック用信頼性係数が基準値のマップに比べ小さくなるように設定された図10の実線より下の破線に示されるマップを選択する。
【0070】
図11は、推定勾配信頼度に基づきフィードバック用信頼性係数を四則演算にて算出する場合のブロック構成の一例を示した図である。この図に示されるように、四則演算を用いる場合、例えば、得られた推定勾配信頼度の逆数(=100/推定勾配信頼度(%))を算出することにより、フィードバック用信頼性係数とすることができる。
【0071】
さらに、推定勾配信頼度に加え、フィードフォワード演算で演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率に基づいてフィードバック用信頼性係数を補正しても良い。これにより、推定勾配トルクの影響度と信頼度の両方に応じて、最適のフィードバック用信頼性係数を設定することができる。
【0072】
例えば、図12に示すように、基準補正係数K、補正基準値P、要求車軸トルク、補正後推定勾配トルクを用いた次の数式2に示す補正係数演算式を用いて演算した補正係数をフィードバック用信頼性係数に掛けることで補正を行うことができる。
【0073】
(数2)
補正係数=K×(|補正後推定勾配トルク|/(|要求車軸トルク|+|補正後推定勾配トルク|)/P)+最低補正基準値
ここで、基準補正係数K、および補正基準値Pは、走行実験やシミュレーションの結果から最適値を設定することが可能である。
【0074】
仮に基準補正係数Kを0.2、補正基準値Pを0.25、要求車軸トルクが2000Nmの場合、想定勾配トルク補正後が200Nmの緩斜面を走行した場合は、上記数式2より、補正係数は、0.2×((200/2000)/0.25)+0.7=0.78と求められる。また、推定勾配トルク補正後が1000Nmの急斜面を走行した場合は、補正係数は、上記数式2より、0.2×((1000/2000)/0.25)+0.7=1.5と求められる。
【0075】
このように、数式2を用いて補正係数を演算し、この補正係数をフィードバック用信頼性係数に掛けることで補正することにより、要求車軸トルクの絶対値に対する補正後推定勾配トルクの絶対値の比率が小さいときに比べ大きいときの方が、フィードバック用信頼性係数が高くなるように補正することができる。
【0076】
なお、フィードバック用信頼性係数の補正係数は、要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率ごとに補正係数演算式を使って演算した演算結果を予め補正係数マップとして記憶し、演算した要求車軸トルクの絶対値と補正後推定勾配トルクの絶対値の比率と、補正係数マップからフィードバック用信頼性係数の補正係数を求めるようにしても良い。
【0077】
また、補正されるフィードバック用信頼性係数は図12に示すように四則演算を用いて算出することに限らず、図9のような推定勾配信頼度に対するフィードバック用信頼性係数の関係を示すマップから求めても良い。
【0078】
このように、推定勾配信頼度が低下するほどフィードバック用信頼性係数が大きな値に設定される。
【0079】
乗算器3icは、フィードバック用信頼性係数算出部3ibで求められたフィードバック用信頼性係数とフィードバック制御器3fで演算されたフィードバックトルクとを掛け合わせることにより、フィードバックトルクを補正する。このとき、フィードバック用信頼性係数が推定勾配信頼度に対応した重み付け量とされているため、フィードバックトルクの補正の度合いは、推定勾配信頼度が低いほど大きくなり、推定勾配信頼度が高いほど小さくなる。このようにして、推定勾配信頼度の低下に応じてフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。
【0080】
次に、推定勾配トルク補正部3kによる推定勾配トルクの補正方法について説明する。上述したように、トルク変換部3jにおいて、推定勾配に応じて発生する推定勾配加速度をトルク変換することで推定勾配トルクを演算しているが、推定勾配加速度は推定勾配信頼度に応じた精度となっている。このため、推定勾配加速度からトルク変換した推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対して推定勾配信頼度に応じた補正を行う。具体的には、推定勾配信頼度の低下に合せて推定勾配トルクの絶対値が小さくなるようにすることで、推定勾配トルクの関与する割合を減らし、推定勾配の誤差の影響を小さくする。これにより、フィードフォワードトルクの精度低下を防ぐ。
【0081】
図13は、推定勾配トルク補正部3kの内部構造を模式的に示したブロック図である。この図に示されるように、推定勾配トルク補正部3kには、補正誤差幅演算部3ka、補正後推定勾配トルク算出部3kbが備えられている。
【0082】
補正誤差幅演算部3kaは、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度に基づいて、各項目別の誤差幅を求めると共に、各項目すべてに対応する誤差幅を足し合わせることにより、総合的な誤差幅を演算する。誤差幅とは、各項目別に予め実験などによって調べておいた推定勾配トルク(推定勾配加速度)の誤差の許容範囲であり、許容範囲内の誤差幅であれば推定勾配トルクの補正を行う程の必要がないことを意味している。
【0083】
各項目別に推定勾配信頼度が求められているが、各項目別に推定勾配トルクの誤差の許容範囲は異なっているため、補正誤差幅演算部3kaでは、各項目別に誤差幅を求めることにより各項目に対応して想定される誤差の許容範囲を演算する。そして、演算した各誤差幅の総和を取ることで、各項目すべてを考慮したときの推定勾配トルクの誤差幅を演算し、誤差幅以内であれば推定勾配トルクの誤差として許容範囲内であるとして、推定勾配トルクの補正を行わない不感帯を設定すると共に、その許容範囲外であれば推定勾配トルクの補正を行う。このように、推定勾配トルクを誤差幅に応じて補正すれば、誤差幅を検証した上で推定勾配トルクを小さくする範囲を決めることができるため、適切な補正量で推定勾配トルクを補正することができる。
【0084】
図14(a)は、各項目別の誤差幅の演算に用いる推定勾配信頼度と誤差幅の関係を示したマップであり、図14(b)は、各項目別の誤差最大幅を示した図表である。
【0085】
図14(a)に示されるように、例えば推定勾配信頼度が0%のときを誤差最大幅に設定すると共に、推定勾配信頼度が100%のときを誤差幅0に設定し、推定勾配信頼度が低下するほど誤差幅が誤差最大幅に近づくマップとなっている。このマップの誤差最大幅に対して、図14(b)に示される各項目別の誤差最大幅を代入し、推定勾配信頼度算出部3hで求められた各項目別の推定勾配信頼度と対応する誤差幅をマップから選択する。例えば、経年劣化に対応する推定勾配信頼度が20%であれば、経年劣化に対応する誤差最大幅0.1G×(1−20%/100%)=0.08Gが経年劣化に対応する誤差幅となる。
【0086】
このようにして各項目別の誤差幅を演算し、各項目別の誤差幅の総和を求める。例えば、経年劣化に対応する推定勾配信頼度が20%のときの誤差幅0.08Gと、加速度センサ温度に対応する推定勾配信頼度が0%のときの誤差幅0.05Gと、積載量学習に対応する推定勾配信頼度が100%のときの誤差幅0.00Gと、悪路レベルに対応する推定勾配信頼度が0%のときの誤差幅0.00Gとの総和は、0.13Gとなる。この値が、各項目すべてを考慮した総合的な誤差幅となる。
【0087】
補正後推定勾配トルク算出部3kbは、補正誤差幅演算部3kaで演算された総合的な誤差幅に基づいて補正後推定勾配トルクを演算する。例えば、補正後推定勾配トルクを次式にて演算している。
【0088】
(数3)
補正後推定勾配トルク=推定勾配トルク−誤差幅
ただし、|推定勾配トルク|≧|誤差幅|の場合にのみ、上記数式により補正後推定勾配トルクの演算を行う。また、路面が上り坂であるか下り坂になるかによって加速度の符号の正負が変わり、推定勾配トルクの符号も加速度の正負の符号と対応するものとなるため、誤差幅の符号も推定勾配トルクの符号と同じ符号とする。また、|推定勾配トルク|<|誤差幅|の場合は、補正後勾配トルクを0にする。
【0089】
このようにして補正後推定勾配トルクを演算する場合の具体例について、図15を参照して説明する。図15(a)、(b)は、それぞれ、推定勾配信頼度が低い場合(誤差幅0.13G)と高い場合(誤差幅0.01G)の推定勾配トルクと補正後推定勾配トルクの関係を示したグラフである。
【0090】
図15(a)に示されるように、誤差幅が0.13と推定勾配信頼度が低い場合には、推定勾配トルクの補正を行わなくても良い許容範囲が広くなる。このため、例えば、トルク変換部3jから入力された推定勾配トルクが0.15Gであったとしても、誤差幅0.13G分が差し引かれるため、補正後推定勾配トルクは0.02Gと小さな値になる。これに対し、誤差幅0.01と推定勾配信頼度が高い場合には、推定勾配トルクの補正を行わなくても良い許容範囲が狭くなる。このため、例えば、トルク変換部3jから入力された推定勾配トルクが0.15Gであれば、誤差幅0.01G分が差し引かれても、補正後推定勾配トルクが0.14Gと大きな値になる。
【0091】
すなわち、推定勾配信頼度が低ければ、仮に推定勾配トルクが大きな値であったとしても、誤差幅が大きいため、その誤差幅を見込んだ小さな値の補正後推定勾配トルクが演算される。逆に、推定勾配信頼度が高ければ、推定勾配トルクの誤差幅が小さいため、あまり補正されることなく補正後推定勾配トルクが演算される。
【0092】
このようにして、推定勾配信頼度を加味した補正後推定勾配トルクが演算されるため、フィードフォワード制御器3cでは、この補正後推定勾配トルクを用いて、次式によりフィードフォワードトルクが演算されることになる。
【0093】
(数4)
フィードフォワードトルク=要求車軸トルク−補正後推定勾配トルク
このようにして本実施形態の車両制駆動力制御システムが構成されている。このように構成された車両制駆動力制御システムでは、加速度要求部1から出力される車両状態に応じた加速度の要求信号に基づいて調停器2がアプリ加速度要求および要求ジャーク制限値を発生させる。また、前後方向制御部3がアプリ加速度要求および要求ジャーク制限値に基づき要求車軸トルクに対するフィードフォワード制御およびフィードバック制御を行いながら要求パワトレトルクおよび要求ブレーキトルクを演算する。そして、要求パワトレトルクに基づいてパワトレ制御部4からエンジンに対するトルク要求値(要求エンジントルク)や自動変速装置に対するギア比の要求値(要求ギア比)を出力することで、エンジン出力および変速制御が行われる。また、要求ブレーキトルクに基づいてブレーキ制御部5がブレーキ制御用のアクチュエータが発生させるホイールシリンダ圧の要求値を出力する。これにより、制駆動力配分に応じた駆動力および制動力が発生させられ、所望の加速度を得ることができる。
【0094】
以上説明した本実施形態の車両制駆動力制御システムによれば以下の効果を得ることができる。
【0095】
すなわち、本実施形態の車両制駆動力制御システムでは、推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正している。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。
【0096】
したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
【0097】
さらに、推定勾配、具体的には推定勾配に相当する物理量である推定勾配加速度をトルク変換した推定勾配トルクを推定勾配信頼度に応じて補正し、補正後推定勾配トルクを用いてフィードフォワードトルクを演算している。このように、推定勾配加速度からトルク変換した推定勾配トルクをそのまま用いるのではなく、推定勾配トルクに対して推定勾配信頼度に応じた補正を行うことで、フィードフォワードトルク自身の精度低下も防ぐことが可能となる。
【0098】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してフィードバック制御器3fの出力に対するフィードバックトルク補正部3iによる補正手法を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0099】
図16は、本実施形態にかかる車両制駆動力制御システムのフィードバック制御器3fおよびフィードバックトルク補正部3iの構造例を示したブロック図である。なお、本図ではトルク変換部3gについては省略してあるが、フィードバック制御器3fの出力をトルク換算しても良いし、フィードバックトルク補正部3iでトルク変換前のフィードバック用の加速度を補正し、その後、それをトルク変換する形態としても良い。
【0100】
この図に示されるように、フィードバック制御器3fは、PID制御によってフィードバック制御を行うものであり、規範モデル記憶部3dで設定された要求加速度から実加速度を減算することによって得られる加速度偏差に対してP項3fa、I項3fb、D項3fcそれぞれでフィードバックトルクを算出する。そして、本実施形態では、このフィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcそれぞれで算出された各フィードバックトルクに対して、フィードバックトルク補正部3iによる補正を行う。
【0101】
具体的には、本実施形態では、フィードバックトルク補正部3iを推定勾配信頼度P項補正部3id、推定勾配信頼度I項補正部3ie、推定勾配信頼度D項補正部3ifに分けている。各項補正部3id〜3ifは、各項それぞれに対応した信頼度を設定している。各項補正部3id〜3ifの内部構成については、例えば第1実施形態で説明した図8と同様の構成とされるが、推定勾配信頼性の関係項目の内容や信頼度の振り分け方などを各項3fa〜3fcの特性に応じて変更している。
【0102】
このように、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcそれぞれのフィードバックトルクに対して別々に設定されたフィードバック用補正係数を掛けて補正することもできる。そして、これら各項の補正後のフィードバックトルクを足し合わせることにより、フィードバックトルク補正部3i全体としての補正後のフィードバックトルクを得ることができる。
【0103】
このように、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcの各項で演算されたフィードバックトルクを別々に補正することもできる。このようにすれば、例えば応答性重視にするなど、各項の特性に合せて各項のフィードバックトルクを補正することができる。
【0104】
(他の実施形態)
(1)上記実施形態では、規範モデル記憶部3dやフィードバック制御器3fおよびトルク変換部3gをパワトレトルクとブレーキトルクのフィードバック制御の双方を行うものとして使用したが、これらをパワトレトルクのフィードバック制御用とブレーキトルクのフィードバック制御用に別々に備えていても良い。
【0105】
(2)上記第1実施形態では、フィードバックトルク補正部3iにてフィードバック制御器3f全体としての出力に対してフィードバック用信頼性係数を掛けることで補正後のフィードバックトルクを求めた。一方、第2実施形態では、フィードバック制御器3fにおけるP項3fa、I項3fb、D項3fcの各項で演算されたフィードバックトルクを各項補正部3id〜3ifで別々に設定されたフィードバック用補正係数を掛けることで補正し、補正後のフィードバックトルクを求めた。
【0106】
これに対し、これらを組み合わせてフィードバックトルクの補正を行うようにしても良い。すなわち、第2実施形態のように各項で演算されたフィードバックトルクを別々に補正したのち、各項の補正後のフィードバックトルクを足し合わせ、その後さらに、第1実施形態のようにフィードバック用信頼性係数を掛けることで補正を行うことにより、最終的な補正後のフィードバックトルクを求めるようにしても良い。
【0107】
(3)また、上記各実施形態では、推定勾配信頼度の算出に経年劣化、加速度センサ温度、積載状態、悪路レベルを例に挙げて説明したが、その他にも、推定勾配信頼度を変化させる要因となるパラメータに基づいて推定勾配信頼度を算出することもできる。
【0108】
(4)フィードフォワード制御を行うために入力される要求トルクとして要求車軸トルクを用いると共に要求車軸トルクを示す所定のパラメータとして加速度を用いている。また、フィードバック制御が行われる所定のパラメータとして加速度を用いている。しかしながら、フィードフォワード制御とフィードバック制御が共に行われるような前後加速度制御装置において、所定のパラメータとして他のものが用いられているような場合においても、本発明を適用することが可能である。
【0109】
ただし、推定勾配の誤差の発生により、駆動と制動の交互の断続的作動を招き易くなる。このため、要求車軸トルクと路面勾配トルクとからフィードフォワードトルクを演算し、フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力させるような前後加速度制御装置に対して、上記各請求項に記載の発明を適用すると特に効果が大きい。
【符号の説明】
【0110】
1…加速度要求部、2…調停器、3…前後方向制御部、3a…ジャーク制御部、3b…トルク変換部、3c…フィードフォワード制御器、3d…規範モデル記憶部、3e…微分器、3f…フィードバック制御器、3g…トルク変換部、3h…推定勾配信頼度算出部、3i…フィードバックトルク補正部、3j…トルク変換部、3k…推定勾配トルク補正部、3m…分配器、4…パワトレ制御部、5…ブレーキ制御部
【特許請求の範囲】
【請求項1】
所定のパラメータに対応する要求トルクと路面の推定勾配から算出された推定勾配トルクに基づいてフィードフォワード制御を実行し、フィードフォワードトルクを出力するフィードフォワード制御器(3c)と、
前記所定のパラメータに基づいてフィードバック制御を実行し、フィードバックトルクを出力するフィードバック制御器(3f)とを有し、
前記フィードフォワードトルクと前記フィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置であって、
前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下に応じて、前記フィードバック制御器のゲインを高くする補正を行うことで、前記フィードバックトルクを補正するフィードバックトルク補正部(3i)と、を具備することを特徴とする前後加速度制御装置。
【請求項2】
所定のパラメータに対応する要求トルクと路面の推定勾配から算出された推定勾配トルクに基づいてフィードフォワード制御を実行し、フィードフォワードトルクを出力するフィードフォワード制御器(3c)と、
前記所定のパラメータに基づいてフィードバック制御を実行し、フィードバックトルクを出力するフィードバック制御器(3f)とを有し、
前記フィードフォワードトルクと前記フィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置であって、
前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下応じて、前記推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、
前記フィードフォワード制御器は、前記推定勾配トルク補正部にて補正された後の前記推定勾配トルクに基づいて前記フィードフォワードトルクを算出することを特徴とする前後加速度制御装置。
【請求項3】
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下に応じて前記推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、
前記フィードフォワード制御器は、前記推定勾配トルク補正部にて補正された後の前記推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴とする請求項1に記載の前後加速度制御装置。
【請求項4】
前記推定勾配トルク補正部は、前記推定勾配信頼度算出部が算出した前記推定勾配信頼度の低下に応じて、前記推定勾配トルクの絶対値が小さくなるように、該推定勾配トルクを補正することを特徴とする請求項2または3に記載の前後加速度制御装置。
【請求項5】
前記推定勾配トルク補正部は、前記推定勾配信頼度算出部が算出した前記推定勾配信頼度の低下に応じて、前記推定勾配トルクの誤差幅を算出し、前記推定勾配トルクを前記誤差幅に応じて補正することを特徴とする請求項2ないし4のいずれか1つに記載の前後加速度制御装置。
【請求項6】
前記フィードバックトルク補正部は、前記推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を有し、該マップもしくは前記関数式に基づいて、算出された前記推定勾配信頼度に対応するフィードバック用信頼性係数を求めると共に、該フィードバック用信頼性係数に基づいて前記フィードバックトルクを補正することを特徴とする請求項1または3に記載の前後加速度制御装置。
【請求項7】
前記フィードフォワード制御器は、前記要求トルクに相当する前記車両の前後方向の加速度の制御を行うための要求車軸トルクと前記推定勾配トルクを前記推定勾配トルク補正部によって補正した補正後推定勾配トルクとから前記フィードフォワードトルクを演算し、
前記フィードバックトルク補正部は、前記要求車軸トルクと前記補正後推定勾配トルクに基づいて、前記フィードバックトルクを補正することを特徴とする請求項1、3および6のいずれか1つに記載の前後加速度制御装置。
【請求項8】
前記フィードバックトルク補正部は、前記フィードバック用信頼性係数を前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合が小さい場合よりも大きい場合のほうが、前記推定勾配信頼度に対する前記フィードバック用信頼性係数が大きくなるように補正することを特徴とする請求項7に記載の前後加速度制御装置。
【請求項9】
前記フィードバックトルク補正部は、前記推定勾配信頼度とフィードバック用信頼性係数との関係が異なるマップを複数有し、該マップは、前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合によって選択され、前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合が小さい場合に選択される前記マップ対し、大きい場合に選択される前記マップの方が、前記推定勾配信頼度に対する前記フィードバック用信頼性係数が大きくなるように前記推定勾配信頼度とフィードバック用信頼性係数との関係が設定されていることを特徴とする請求項8に記載の前後加速度制御装置。
【請求項10】
前記推定勾配トルクは、路面勾配によって前記車両に発生する前後方向の加速度である推定路面加速度をトルク換算したものであり、
前記フィードバック制御器は、前記フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力し、
前記フィードフォワード制御器は、前記要求トルクに相当する前記車両の前後方向の加速度の制御を行うための要求車軸トルクと前記路面勾配トルクを前記推定勾配トルク補正部によって補正した補正後推定勾配トルクとから前記フィードフォワードトルクを演算することを特徴とする請求項3ないし9のいずれか1つに記載の前後加速度制御装置。
【請求項1】
所定のパラメータに対応する要求トルクと路面の推定勾配から算出された推定勾配トルクに基づいてフィードフォワード制御を実行し、フィードフォワードトルクを出力するフィードフォワード制御器(3c)と、
前記所定のパラメータに基づいてフィードバック制御を実行し、フィードバックトルクを出力するフィードバック制御器(3f)とを有し、
前記フィードフォワードトルクと前記フィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置であって、
前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下に応じて、前記フィードバック制御器のゲインを高くする補正を行うことで、前記フィードバックトルクを補正するフィードバックトルク補正部(3i)と、を具備することを特徴とする前後加速度制御装置。
【請求項2】
所定のパラメータに対応する要求トルクと路面の推定勾配から算出された推定勾配トルクに基づいてフィードフォワード制御を実行し、フィードフォワードトルクを出力するフィードフォワード制御器(3c)と、
前記所定のパラメータに基づいてフィードバック制御を実行し、フィードバックトルクを出力するフィードバック制御器(3f)とを有し、
前記フィードフォワードトルクと前記フィードバックトルクに基づいて車両の前後方向の加速度を制御するための最終的な要求トルクを出力する前後加速度制御装置であって、
前記推定勾配の信頼度である推定勾配信頼度を算出する推定勾配信頼度算出部(3h)と、
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下応じて、前記推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、
前記フィードフォワード制御器は、前記推定勾配トルク補正部にて補正された後の前記推定勾配トルクに基づいて前記フィードフォワードトルクを算出することを特徴とする前後加速度制御装置。
【請求項3】
前記推定勾配信頼度算出部にて算出された前記推定勾配信頼度の低下に応じて前記推定勾配トルクを補正する推定勾配トルク補正部(3k)を有し、
前記フィードフォワード制御器は、前記推定勾配トルク補正部にて補正された後の前記推定勾配トルクに基づいて前記フィードフォワードトルクを演算することを特徴とする請求項1に記載の前後加速度制御装置。
【請求項4】
前記推定勾配トルク補正部は、前記推定勾配信頼度算出部が算出した前記推定勾配信頼度の低下に応じて、前記推定勾配トルクの絶対値が小さくなるように、該推定勾配トルクを補正することを特徴とする請求項2または3に記載の前後加速度制御装置。
【請求項5】
前記推定勾配トルク補正部は、前記推定勾配信頼度算出部が算出した前記推定勾配信頼度の低下に応じて、前記推定勾配トルクの誤差幅を算出し、前記推定勾配トルクを前記誤差幅に応じて補正することを特徴とする請求項2ないし4のいずれか1つに記載の前後加速度制御装置。
【請求項6】
前記フィードバックトルク補正部は、前記推定勾配信頼度とフィードバック用信頼性係数との関係を示すマップもしくは関係式を有し、該マップもしくは前記関数式に基づいて、算出された前記推定勾配信頼度に対応するフィードバック用信頼性係数を求めると共に、該フィードバック用信頼性係数に基づいて前記フィードバックトルクを補正することを特徴とする請求項1または3に記載の前後加速度制御装置。
【請求項7】
前記フィードフォワード制御器は、前記要求トルクに相当する前記車両の前後方向の加速度の制御を行うための要求車軸トルクと前記推定勾配トルクを前記推定勾配トルク補正部によって補正した補正後推定勾配トルクとから前記フィードフォワードトルクを演算し、
前記フィードバックトルク補正部は、前記要求車軸トルクと前記補正後推定勾配トルクに基づいて、前記フィードバックトルクを補正することを特徴とする請求項1、3および6のいずれか1つに記載の前後加速度制御装置。
【請求項8】
前記フィードバックトルク補正部は、前記フィードバック用信頼性係数を前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合が小さい場合よりも大きい場合のほうが、前記推定勾配信頼度に対する前記フィードバック用信頼性係数が大きくなるように補正することを特徴とする請求項7に記載の前後加速度制御装置。
【請求項9】
前記フィードバックトルク補正部は、前記推定勾配信頼度とフィードバック用信頼性係数との関係が異なるマップを複数有し、該マップは、前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合によって選択され、前記要求車軸トルクの絶対値に対する前記勾配トルク絶対値の割合が小さい場合に選択される前記マップ対し、大きい場合に選択される前記マップの方が、前記推定勾配信頼度に対する前記フィードバック用信頼性係数が大きくなるように前記推定勾配信頼度とフィードバック用信頼性係数との関係が設定されていることを特徴とする請求項8に記載の前後加速度制御装置。
【請求項10】
前記推定勾配トルクは、路面勾配によって前記車両に発生する前後方向の加速度である推定路面加速度をトルク換算したものであり、
前記フィードバック制御器は、前記フィードバックトルクとしてパワトレフィードバックトルクおよびブレーキフィードバックトルクを出力し、
前記フィードフォワード制御器は、前記要求トルクに相当する前記車両の前後方向の加速度の制御を行うための要求車軸トルクと前記路面勾配トルクを前記推定勾配トルク補正部によって補正した補正後推定勾配トルクとから前記フィードフォワードトルクを演算することを特徴とする請求項3ないし9のいずれか1つに記載の前後加速度制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−25914(P2011−25914A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2010−129080(P2010−129080)
【出願日】平成22年6月4日(2010.6.4)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成22年6月4日(2010.6.4)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]