
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、前輪駆動装置と後輪駆動装置とを備えた前後輪駆動車両に関する。
【背景技術】
【0002】
特許文献1に記載の車両100は、図16に示すように、前輪がエンジン等の主駆動源(図示せず)により駆動されるようになっており、後輪102が補助駆動源である電動機103により動力伝達機構104を介して駆動されるようになっている。
【0003】
この動力伝達機構104は、電動機103からの動力を入力する減速機構105と、減速機構105から出力される動力を左右の後輪102,102に分配する差動歯車106とから構成されている。減速機構105は、電動機103の出力軸に固定された第1ギヤ105aと、第1ギヤ105aに噛合する第2ギヤ105bと、差動歯車106の入力ギヤ106aに噛合する第3ギヤ105cとからなる減速ギヤ列で構成されている。そして、第2ギヤ105bと第3ギヤ105cとの間には油圧クラッチ107が設けられており、油圧クラッチ107を係合したときに第2ギヤ105bと第3ギヤ105cとが連結されて、動力伝達機構104を介して電動機103の動力を後輪102に伝達可能になり、油圧クラッチ107を解放したときに第2ギヤ105bと第3ギヤ105cとの連結が解かれて、電動機103の動力の後輪102への伝達が遮断される。
【0004】
しかしながら、特許文献1に記載の動力伝達機構104では、電動機103の動力を後輪102に伝達するためには、油圧クラッチ107を動力伝達可能に強固に係合させてトルク容量の大きい状態に維持する必要があるため、例えば油温が低い場合などに応答遅れが生じる虞があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−258279号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
その対策として、例えば動力伝達機構104にさらに一方向クラッチを設け、車両が前進する際に係合するように構成することが考えられるが、電動機103が停止状態でエンジン等の主駆動源により前輪駆動で車両が後進すると、一方向クラッチはその構造上係合してしまう。この一方向クラッチの意図しない係合により、車両後進時には電動機103が連れまわされ車両エネルギ効率の悪化等が生じるおそれがあった。
【0007】
本発明は、上記課題に鑑みてなされたものであり、車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1に記載の発明は、
前輪および後輪の一方である第1駆動輪(例えば、後述の実施形態の後輪Wr)を駆動する第1駆動装置(例えば、後述の実施形態の後輪駆動装置1)と、該前輪および後輪の他方である第2駆動輪(例えば、後述の実施形態の前輪Wf)を駆動する第2駆動装置(例えば、後述の実施形態の前輪駆動装置6)と、を備えた前後輪駆動車両(例えば、後述の実施形態の車両3)であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機(例えば、後述の実施形態の電動機2A、2B、2C)と、
前記電動機を制御する電動機制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段(例えば、後述の実施形態の油圧ブレーキ60A、60B)と、
前記断接手段を制御する断接手段制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段(例えば、後述の実施形態の一方向クラッチ50)と、を備え、
車両後進時には、少なくとも前記第1駆動装置に後進駆動力を発生させて後進させ、
前記第1駆動装置に後進駆動力を発生させるときに、前記断接手段制御装置は前記断接手段を締結して電動機側と第1駆動輪側とを接続状態にし、前記電動機制御装置は前記電動機を逆方向の回転動力が発生するよう駆動することを特徴とする。
【0009】
また、請求項2に記載の発明は、請求項1に記載の構成に加えて、
車両後進時に、前記第1駆動装置のみに後進駆動力を発生させる一方輪後進状態(例えば、後述の実施形態の後輪後進状態)と、前記第1駆動装置及び前記第2駆動装置に後進駆動力を発生させる前後輪後進状態(例えば、後述の実施形態の前後輪後進状態)とを切り替える後進制御装置(例えば、後述の実施形態のECU45)を備えることを特徴とする。
【0010】
また、請求項3に記載の発明は、請求項2に記載の構成に加えて、
路面状態を推定または検出する路面状態取得手段をさらに備え、
前記後進制御装置は、路面状態に基づいて前記切り替えを行うことを特徴とする。
【0011】
また、請求項4に記載の発明は、請求項3に記載の構成に加えて、
前記路面状態は路面の傾斜状態であって、前記路面の傾斜状態に基づいて前記切り替えを行うことを特徴とする。
【0012】
また、請求項5に記載の発明は、請求項4に記載の構成に加えて、
前記後進制御装置は、後進方向の傾斜が所定値より大きいときに、前記前後輪後進状態とすることを特徴とする。
【0013】
また、請求項6に記載の発明は、請求項3に記載の構成に加えて、
前記路面状態は路面の摩擦状態であって、前記路面の摩擦状態に基づいて前記切り替えを行うことを特徴とする。
【0014】
また、請求項7に記載の発明は、請求項6に記載の構成に加えて、
前記後進制御装置は、所定の摩擦状態よりも低い低摩擦状態のときに、前記前後輪後進状態とすることを特徴とする。
【0015】
また、請求項8に記載の発明は、請求項2〜7のいずれか1項に記載の構成に加えて、
車両運転者の後進意思を検出または推定する後進意思取得手段をさらに備え、
前記後進制御装置は、前記後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことを特徴とする。
【0016】
また、請求項9に記載の発明は、請求項2〜8のいずれか1項に記載の構成に加えて、
前記一方輪後進状態での後進時に、前記第1駆動輪のスリップを推定もしくは検出するスリップ状態取得手段をさらに備え、
前記後進制御装置は、スリップ状態が取得されたときに前記前後輪後進状態に切り替えることを特徴とする。
【0017】
また、請求項10に記載の発明は、請求項2〜9のいずれか1項に記載の構成に加えて、
前記第2駆動装置は、車両の駆動力を発生する内燃機関(例えば、後述の実施形態の内燃機関4)と他の電動機(例えば、後述の実施形態の電動機5)とを備え、
前記前後輪駆動車両は、前記電動機及び前記他の電動機へ電力を供給する蓄電装置(例えば、後述の実施形態のバッテリ9)の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記後進制御装置は、前記前後輪後進状態での後進時に、前記蓄電状態に基づいて前記第2駆動装置の前記内燃機関と前記他の電動機とを制御することを特徴とする。
【0018】
また、請求項11に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値より低いときに、前記後進制御装置は、前記内燃機関のみから駆動力を発生させるように前記第2駆動装置を制御することを特徴とする。
【0019】
また、請求項12に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値以上のときに、前記後進制御装置は、少なくとも前記他の電動機から駆動力を発生させるように前記第2駆動装置を制御することを特徴とする。
【0020】
また、請求項13に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値以上のときに、前記後進制御装置は、前記電動機から駆動力を発生させかつ前記内燃機関を停止させるように前記第2駆動装置を制御することを特徴とする。
【0021】
また、請求項14に記載の発明は、請求項1〜9のいずれか1項に記載の構成に加えて、
前記第2駆動装置は、車両の駆動力を発生する内燃機関(例えば、後述の実施形態の内燃機関4)と他の電動機(例えば、後述の実施形態の電動機5)とを備え、
前記前後輪駆動車両は、前記他の電動機による発電電力を蓄電する蓄電装置(例えば、後述の実施形態のバッテリ9)と、前記電動機への電力供給を制御する電力供給制御装置(例えば、後述の実施形態のECU45)と、をさらに備え、
前記電動機は、前記他の電動機の発電電力と前記蓄電装置の電力の少なくとも一方を消費して駆動されることを特徴とする。
【0022】
また、請求項15に記載の発明は、請求項14に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の温度を推定もしくは検出する蓄電装置温度取得手段をさらに備え、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力を超えないように制御することを特徴とする。
【0023】
また、請求項16に記載の発明は、請求項15に記載の構成に加えて、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力と前記電動機による消費電力とが等しくなるように制御することを特徴とする。
【0024】
また、請求項17に記載の発明は、請求項14に記載の構成に加えて、
前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力よりも大きくなるように制御することを特徴とする。
【0025】
また、請求項18に記載の発明は、請求項14に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が電動機による消費電力よりも大きくなるように制御することを特徴とする。
【0026】
また、請求項19に記載の発明は、請求項14に記載の構成に加えて、
前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする。
【0027】
また、請求項20に記載の発明は、請求項19に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする。
【0028】
上記の目的を達成するために、請求項21に記載の発明は、
前輪および後輪の一方である第1駆動輪(例えば、後述の実施形態の後輪Wr)を駆動する第1駆動装置(例えば、後述の実施形態の後輪駆動装置1)と、該前輪および後輪の他方である第2駆動輪(例えば、後述の実施形態の前輪Wf)を駆動する第2駆動装置(例えば、後述の実施形態の前輪駆動装置6)と、を備えた前後輪駆動車両(例えば、後述の実施形態の車両3)であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機(例えば、後述の実施形態の電動機2A、2B、2C)と、
前記電動機を制御する電動機制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段(例えば、後述の実施形態の油圧ブレーキ60A、60B)と、
前記断接手段を制御する断接手段制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段(例えば、後述の実施形態の一方向クラッチ50)と、を備え、
車両後進時に、前記第2駆動装置の駆動力のみによる後進駆動を禁止する後進禁止手段を備えることを特徴とする。
【発明の効果】
【0029】
請求項1に記載の発明によれば、車両後進時に第2駆動装置の後進駆動力のみで後進すると一方向動力伝達手段が係合状態となって、電動機のフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるが、少なくとも第1駆動装置の後進駆動力を発生させて後進することにより、車両エネルギ効率(燃費・電費)や後進走行性能の悪化を抑制できる。
【0030】
請求項2に記載の発明によれば、一方輪後進と前後輪後進とを切り替えて用いることで、車両エネルギ効率や走行状況に応じた適切な後進を行うことができる。
【0031】
請求項3に記載の発明によれば、路面状態に基づいて切り替えを行うことで、さらに適切な後進が可能となる。
【0032】
請求項4に記載の発明によれば、路面の傾斜状態に基づいて切り替えを行うことで、傾斜状態に応じた適切な切り替えをすることが可能となる。
【0033】
請求項5に記載の発明によれば、後進登坂が所定値より大きいときに、前後輪後進状態とすることで、スリップの発生や、登坂できなくなることを防止、又は抑制できる。また、所定値以下のときには、一方輪後進とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0034】
請求項6に記載の発明によれば、路面の摩擦状態に基づいて切り替えを行うことで、摩擦状態に応じた適切な切り替えをすることが可能となる。
【0035】
請求項7に記載の発明によれば、雪道等の低摩擦状態のときに、前後輪後進とすることで、スリップの発生を防止、又は抑制できる。また、高摩擦状態のときには、一方輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0036】
請求項8に記載の発明によれば、後進開始前に切り替え判定をするので、後進開始時のスリップを抑制できる。
【0037】
請求項9に記載の発明によれば、一方輪後進状態での後進走行中にスリップを検出したときに、前後輪後進状態による後進走行とすることでスリップを早期に解消できる。
【0038】
請求項10に記載の発明によれば、蓄電装置の蓄電状態に基づいて第2駆動装置の内燃機関と他の電動機とを制御することで、車両エネルギ効率、走破性などを適切に制御することができる。
【0039】
請求項11に記載の発明によれば、蓄電状態が所定値より低い場合に、第2駆動装置の他の電動機からは駆動力を発生させず、蓄電装置の電力を第1駆動装置の電動機のみに供給可能となるので、蓄電状態が低い場合にも前後輪後進が可能となる。
【0040】
請求項12に記載の発明によれば、蓄電状態が所定値以上のときに、少なくとも第2駆動装置の他の電動機から駆動力を発生させることでエンジンの負荷を低減でき、車両エネルギ効率を向上できる。
【0041】
請求項13に記載の発明によれば、蓄電状態が所定値以上のときに、内燃機関を停止させることで、さらに車両エネルギ効率を向上できる。
【0042】
請求項14に記載の発明によれば、電力供給制御装置によって第1駆動装置の電動機への電力供給源を制御することによって、蓄電装置の状態や第2駆動装置の他の電動機の状態に応じて第1駆動装置の電動機の駆動を適切に行うことができる。
【0043】
請求項15に記載の発明によれば、発電電力が消費電力に対し過剰とならないので、低温時にバッテリに電力が流入することを抑制することができる。
【0044】
請求項16に記載の発明によれば、発電電力が消費電力に対し不足とならないので、第1駆動装置の電動機で所望の駆動力を出力することができる。
【0045】
請求項17に記載の発明によれば、第2駆動装置の他の電動機による発電電力が第1駆動装置の電動機の消費電力よりも大きくなるので、第1駆動装置の電動機で所望の駆動力を出力しつつ蓄電装置を充電することができる。
【0046】
請求項18に記載の発明によれば、低蓄電状態のときに蓄電装置を充電することが可能で、蓄電装置の蓄電状態を適切な範囲に維持することができる。
【0047】
請求項19に記載の発明によれば、蓄電装置から電力を持ち出すことなく、第1駆動装置の電動機を駆動することができる。
【0048】
請求項20に記載の発明によれば、低蓄電状態のときに第1駆動装置の電動機への電力供給を第2駆動装置の他の電動機の発電電力のみとすることで、それ以上の蓄電状態の低下を抑制できる。
【0049】
請求項21に記載の発明によれば、車両後進時に第2駆動装置の後進駆動力のみで後進すると一方向動力伝達手段が係合状態となって、電動機のフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるため、これを禁止することで車両エネルギ効率や後進走行性能の悪化を抑制できる。
【図面の簡単な説明】
【0050】
【図1】本発明に係る前後輪駆動車両の一実施形態であるハイブリッド車両の概略構成を示すブロック図である。
【図2】第1実施形態の後輪駆動装置の縦断面図である。
【図3】図2に示す後輪駆動装置の部分拡大図である。
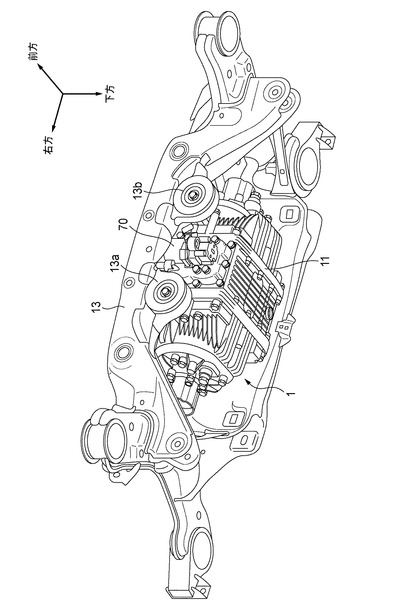
【図4】後輪駆動装置がフレームに搭載された状態を示す斜視図である。
【図5】各車両状態における前輪駆動装置、後輪駆動装置、電動機、一方向クラッチ、油圧ブレーキの状態を記載した表である。
【図6】停車中の後輪駆動装置の速度共線図である。
【図7】前進低車速時の後輪駆動装置の速度共線図である。
【図8】前進中車速時の後輪駆動装置の速度共線図である。
【図9】減速回生時の後輪駆動装置の速度共線図である。
【図10】前進高車速時の後輪駆動装置の速度共線図である。
【図11】後進時の後輪駆動装置の速度共線図である。
【図12】車両後進時の制御フローを示すフロー図である。
【図13】後輪後進時の電力制御フローを示すフロー図である。
【図14】車両走行におけるタイミングチャートである。
【図15】変形例に係る後輪駆動装置を搭載した車両の概略構成を示すブロック図である。
【図16】特許文献1に記載の車両用駆動装置の概略図である。
【発明を実施するための形態】
【0051】
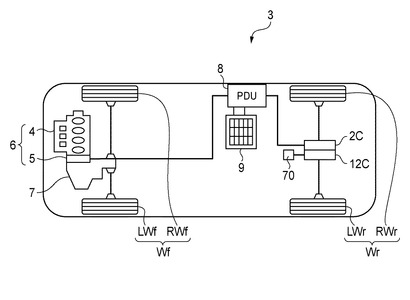
先ず、本発明に係る前後輪駆動車両の一実施形態を図1に基づいて説明する。
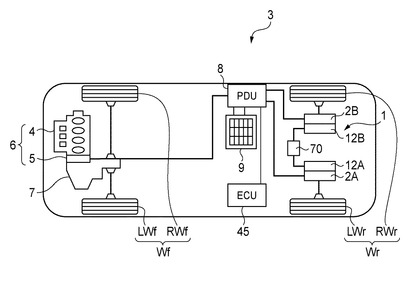
本発明に係る前後輪駆動車両3(以下、車両と呼ぶ。)は、図1に示すように、内燃機関4と電動機5が直列に接続された駆動装置6(以下、前輪駆動装置と呼ぶ。)を車両前部に有するハイブリッド車両であり、この前輪駆動装置6の動力がトランスミッション7を介して前輪Wf(RWf、LWf)に伝達される一方で、この前輪駆動装置6と別に車両後部に設けられた駆動装置1(以下、後輪駆動装置と呼ぶ。)の動力が後輪Wr(RWr、LWr)に伝達されるようになっている。前輪駆動装置6の電動機5と後輪Wr側の後輪駆動装置1の電動機2A、2Bは、PDU8(パワードライブユニット)を介してバッテリ9に接続され、バッテリ9からの電力供給と、バッテリ9へのエネルギー回生がPDU8を介して行われるようになっている。PDU8は後述するECU45に接続されている。なお、本実施形態では、駆動装置1を後輪駆動用とし駆動装置6を前輪駆動用として説明するが、駆動装置1を前輪駆動用とし駆動装置6を後輪駆動用としてもよい。
【0052】
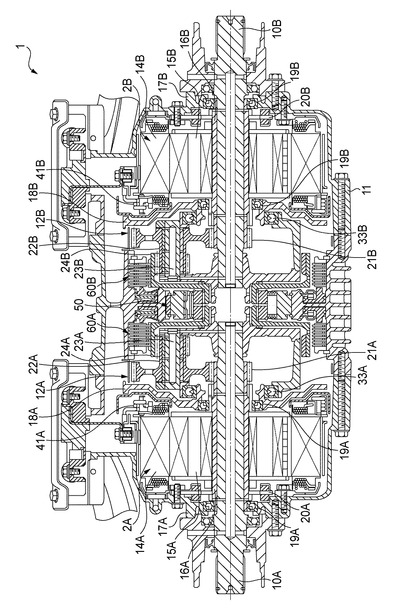
図2は、後輪駆動装置1の全体の縦断面図を示すものであり、同図において、10A、10Bは、車両の後輪Wr側の左右の車軸であり、車幅方向に同軸上に配置されている。後輪駆動装置1の減速機ケース11は全体が略円筒状に形成され、その内部には、車軸駆動用の電動機2A、2Bと、この電動機2A、2Bの駆動回転を減速する遊星歯車式減速機12A、12Bとが、車軸10A、10Bと同軸上に配置されている。この電動機2A及び遊星歯車式減速機12Aは左後輪LWrを制御し、電動機2B及び遊星歯車式減速機12Bは右後輪RWrを制御し、電動機2A及び遊星歯車式減速機12Aと電動機2B及び遊星歯車式減速機12Bは、減速機ケース11内で車幅方向に左右対称に配置されている。そして、減速機ケース11は、図4に示すように、車両3の骨格となるフレームの一部であるフレーム部材13の支持部13a、13bと、不図示の後輪駆動装置1のフレームで支持されている。支持部13a、13bは、車幅方向でフレーム部材13の中心に対し左右に設けられている。なお、図4中の矢印は、後輪駆動装置1が車両に搭載された状態における位置関係を示している。
【0053】
減速機ケース11の左右両端側内部には、それぞれ電動機2A、2Bのステータ14A、14Bが固定され、このステータ14A、14Bの内周側に環状のロータ15A、15Bが回転可能に配置されている。ロータ15A、15Bの内周部には車軸10A、10Bの外周を囲繞する円筒軸16A、16Bが結合され、この円筒軸16A、16Bが車軸10A、10Bと同軸で相対回転可能となるように減速機ケース11の端部壁17A、17Bと中間壁18A、18Bに軸受19A、19Bを介して支持されている。また、円筒軸16A、16Bの一端側の外周であって減速機ケース11の端部壁17A、17Bには、ロータ15A、15Bの回転位置情報を電動機2A、2Bの制御コントローラ(図示せず)にフィードバックするためのレゾルバ20A、20Bが設けられている。
【0054】
また、遊星歯車式減速機12A、12Bは、サンギヤ21A、21Bと、このサンギヤ21に噛合される複数のプラネタリギヤ22A、22Bと、これらのプラネタリギヤ22A、22Bを支持するプラネタリキャリア23A、23Bと、プラネタリギヤ22A、22Bの外周側に噛合されるリングギヤ24A、24Bと、を備え、サンギヤ21A、21Bから電動機2A、2Bの駆動力が入力され、減速された駆動力がプラネタリキャリア23A、23Bを通して出力されるようになっている。
【0055】
サンギヤ21A、21Bは円筒軸16A、16Bに一体に形成されている。また、プラネタリギヤ22A、22Bは、例えば図3に示すように、サンギヤ21A、21Bに直接噛合される大径の第1ピニオン26A、26Bと、この第1ピニオン26A、26Bよりも小径の第2ピニオン27A、27Bを有する2連ピニオンであり、これらの第1ピニオン26A、26Bと第2ピニオン27A、27Bが同軸にかつ軸方向にオフセットした状態で一体に形成されている。このプラネタリギヤ22A、22Bはプラネタリキャリア23A、23Bに支持され、プラネタリキャリア23A、23Bは、軸方向内側端部が径方向内側に伸びて車軸10A、10Bにスプライン嵌合され一体回転可能に支持されるとともに、軸受33A、33Bを介して中間壁18A、18Bに支持されている。
【0056】
なお、中間壁18A、18Bは電動機2A、2Bを収容する電動機収容空間と遊星歯車式減速機12A、12Bを収容する減速機空間とを隔て、外径側から内径側に互いの軸方向間隔が広がるように屈曲して構成されている。そして、中間壁18A、18Bの内径側、且つ、遊星歯車式減速機12A、12B側にはプラネタリキャリア23A、23Bを支持する軸受33A、33Bが配置されるとともに中間壁18A、18Bの外径側、且つ、電動機2A、2B側にはステータ14A、14B用のバスリング41A、41Bが配置されている(図2参照)。
【0057】
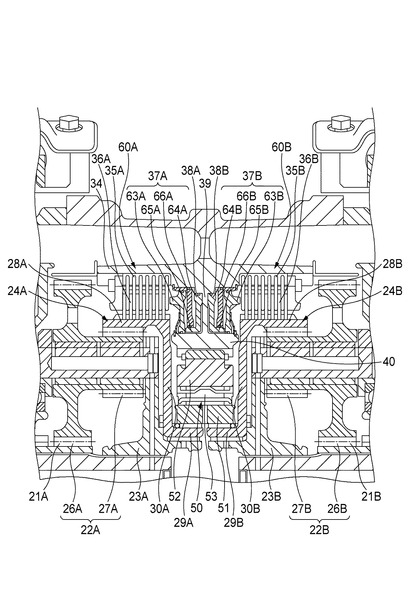
リングギヤ24A、24Bは、その内周面が小径の第2ピニオン27A、27Bに噛合されるギヤ部28A、28Bと、ギヤ部28A、28Bより小径で減速機ケース11の中間位置で互いに対向配置される小径部29A、29Bと、ギヤ部28A、28Bの軸方向内側端部と小径部29A、29Bの軸方向外側端部を径方向に連結する連結部30A、30Bとを備えて構成されている。この実施形態の場合、リングギヤ24A、24Bの最大半径は、第1ピニオン26A、26Bの車軸10A、10Bの中心からの最大距離よりも小さくなるように設定されている。小径部29A、29Bは、それぞれ後述する一方向クラッチ50のインナーレース51とスプライン嵌合し、リングギヤ24A、24Bは一方向クラッチ50のインナーレース51と一体回転するように構成されている。
【0058】
ところで、減速機ケース11とリングギヤ24A、24Bの間には円筒状の空間部が確保され、その空間部内に、リングギヤ24A、24Bに対する制動手段を構成する油圧ブレーキ60A、60Bが第1ピニオン26A、26Bと径方向でオーバーラップし、第2ピニオン27A、27Bと軸方向でオーバーラップして配置されている。油圧ブレーキ60A、60Bは、減速機ケース11の内径側で軸方向に伸びる筒状の外径側支持部34の内周面にスプライン嵌合された複数の固定プレート35A、35Bと、リングギヤ24A、24Bの外周面にスプライン嵌合された複数の回転プレート36A、36Bが軸方向に交互に配置され、これらのプレート35A、35B,36A、36Bが環状のピストン37A、37Bによって締結及び解放操作されるようになっている。ピストン37A、37Bは、減速機ケース11の中間位置から内径側に延設された左右分割壁39と、左右分割壁39によって連結された外径側支持部34と内径側支持部40間に形成された環状のシリンダ室38A、38Bに進退自在に収容されており、シリンダ室38A、38Bへの高圧オイルの導入によってピストン37A、37Bを前進させ、シリンダ室38A、38Bからオイルを排出することによってピストン37A、37Bを後進させる。なお、油圧ブレーキ60A、60Bは図4に示すように、前述したフレーム部材13の支持部13a、13b間に配置された電動オイルポンプ70に接続されている。
【0059】
また、さらに詳細には、ピストン37A、37Bは、軸方向前後に第1ピストン壁63A、63Bと第2ピストン壁64A、64Bを有し、これらのピストン壁63A、63B、64A、64Bが円筒状の内周壁65A、65Bによって連結されている。したがって、第1ピストン壁63A、63Bと第2ピストン壁64A、64Bの間には径方向外側に開口する環状空間が形成されているが、この環状空間は、シリンダ室38A、38Bの外壁内周面に固定された仕切部材66A、66Bによって軸方向左右に仕切られている。減速機ケース11の左右分割壁39と第2ピストン壁64A、64Bの間は高圧オイルが直接導入される第1作動室S1(図5参照)とされ、仕切部材66A、66Bと第1ピストン壁63A、63Bの間は、内周壁65A、65Bに形成された貫通孔を通して第1作動室S1と導通する第2作動室S2(図5参照)とされている。第2ピストン壁64A、64Bと仕切部材66A、66Bの間は大気圧に導通している。
【0060】
この油圧ブレーキ60A、60Bでは、第1作動室S1と第2作動室S2に不図示の油圧回路からオイルが導入され、第1ピストン壁63A、63Bと第2ピストン壁64A、64Bに作用するオイルの圧力によって固定プレート35A、35Bと回転プレート36A、36Bを相互に押し付けが可能である。したがって、軸方向左右の第1,第2ピストン壁63A、63B、64A、64Bによって大きな受圧面積を稼ぐことができるため、ピストン37A、37Bの径方向の面積を抑えたまま固定プレート35A、35Bと回転プレート36A、36Bに対する大きな押し付け力を得ることができる。
【0061】
この油圧ブレーキ60A、60Bの場合、固定プレート35A、35Bが減速機ケース11から伸びる外径側支持部34に支持される一方で、回転プレート36A、36Bがリングギヤ24A、24Bに支持されているため、両プレート35A、35B、36A、36Bがピストン37A、37Bによって押し付けられると、両プレート35A、35B、36A、36B間の摩擦締結によってリングギヤ24A、24Bに制動力が作用し固定され、その状態からピストン37A、37Bによる締結が解放されると、リングギヤ24A、24Bの自由な回転が許容される。
【0062】
また、軸方向で対向するリングギヤ24A、24Bの連結部30A、30B間にも空間部が確保され、その空間部内に、リングギヤ24A、24Bに対し一方向の動力のみを伝達し他方向の動力を遮断する一方向クラッチ50が配置されている。一方向クラッチ50は、インナーレース51とアウターレース52との間に多数のスプラグ53を介在させたものであって、そのインナーレース51がスプライン嵌合によりリングギヤ24A、24Bの小径部29A、29Bと一体回転するように構成されている。またアウターレース52は、内径側支持部40により位置決めされるとともに、回り止めされている。一方向クラッチ50は、車両3が電動機2A、2Bの動力で前進する際に係合してリングギヤ24A、24Bの回転をロックするように構成されている。より具体的に説明すると、一方向クラッチ50は、電動機2A、2B側の順方向(車両3を前進させる際の回転方向)の回転動力が後輪Wr側に入力されるときに係合状態となるとともに電動機2A、2B側の逆方向の回転動力が後輪Wr側に入力されるときに非係合状態となり、後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときに非係合状態となるとともに後輪Wr側の逆方向の回転動力が電動機2A、2B側に入力されるときに係合状態となる。
【0063】
このように本実施形態の後輪駆動装置1では、電動機2A、2Bと後輪Wrとの動力伝達経路上に一方向クラッチ50と油圧ブレーキ60A、60Bとが並列に設けられている。なお、油圧ブレーキ60は、不図示の油圧回路に接続され、車両の走行状態や一方向クラッチ50の係合・非係合状態に応じて、オイルポンプ70から油圧回路を介して供給されるオイルの圧力により、解放状態、弱締結状態、締結状態に制御される。
【0064】
ここで、ECU45(図1参照)は、車両全体の各種制御をするための制御装置であり、ECU45には車速、操舵角、アクセルペダル開度AP、シフトポジション、蓄電状態(State of Charge 以下、SOCと呼ぶことがある。)などが入力される一方、ECU45からは、内燃機関4を制御する信号、電動機2A、2B、5を制御する信号、バッテリ9における充電状態・放電状態などを示す信号、油圧回路(不図示)を制御する信号、電動オイルポンプ70を制御する制御信号などが出力される。
【0065】
即ち、ECU45は、前輪駆動装置6による前輪駆動を行なうか、後輪駆動装置1による後輪駆動を行なうか、又は前輪駆動装置6と後輪駆動装置1による四輪駆動を行なうかを制御する前後進制御装置(前進時は前進制御装置、後進時は後進制御装置)としての機能と、電動機2A、2Bを制御する電動機制御装置としての機能と、断接手段としての油圧ブレーキ60A、60Bを制御する断接手段制御装置としての機能と、内燃機関4と電動機5を制御する前輪駆動源制御装置としての機能と、バッテリ9と電動機2A、2B、5間の電力供給及び電動機2A、2Bと電動機5間の電力供給を制御する電力供給制御装置としての機能とを、少なくとも備えている。
【0066】
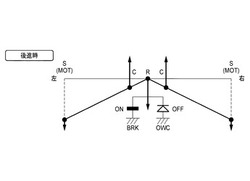
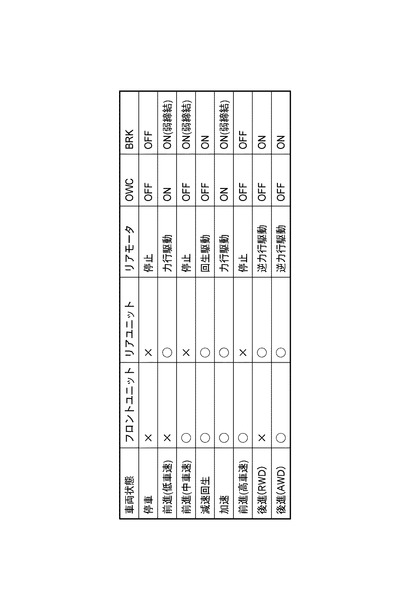
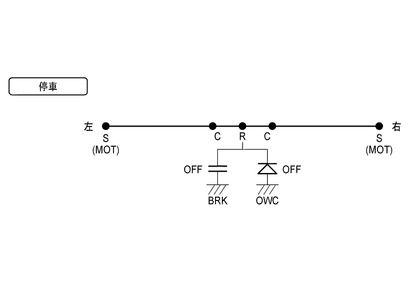
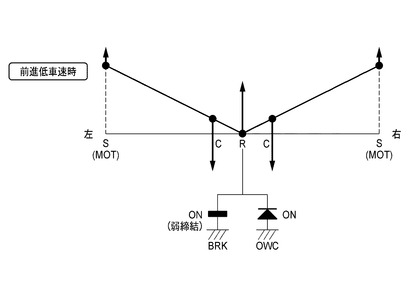
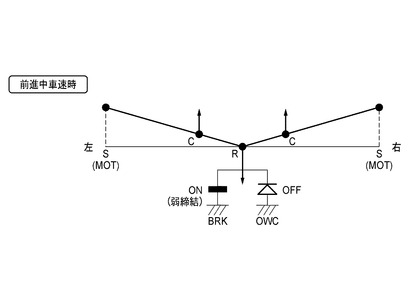
図5は、各車両状態における前輪駆動装置6、後輪駆動装置1、電動機2A、2B、一方向クラッチ50、油圧ブレーキ60A、60Bの状態を記載した表である。図中、フロントユニットは前輪駆動装置6、リアユニットは後輪駆動装置1、リアモータは電動機2A、2B、OWCは一方向クラッチ50、BRKは油圧ブレーキ60A、60Bを表わす。また、図6〜図11は後輪駆動装置1の各状態における速度共線図を表わし、左側のS、Cはそれぞれ電動機2Aに連結された遊星歯車式減速機12Aのサンギヤ21A、車軸10Aに連結されたプラネタリキャリア23A、右側のS、Cはそれぞれ電動機2Bに連結された遊星歯車式減速機12Bのサンギヤ21B、車軸10Bに連結されたプラネタリキャリア23B、Rはリングギヤ24A、24B、BRKは油圧ブレーキ60A、60B、OWCは一方向クラッチ50を表わす。以下の説明において電動機2A、2Bによる車両前進時のサンギヤ21A、21Bの回転方向を順方向とする。また、図中、停車中の状態から上方が順方向の回転、下方が逆方向の回転であり、矢印は、上方が順方向のトルクを表し、下方が逆方向のトルクを表す。
【0067】
停車中は、前輪駆動装置6も後輪駆動装置1も駆動していない。従って、図6に示すように、後輪駆動装置1の電動機2A、2Bは停止しており、車軸10A、10Bも停止しているため、いずれの要素にもトルクは作用していない。この車両の停車中においては、油圧ブレーキ60A、60Bは解放(OFF)されている。また、一方向クラッチ50は、電動機2A、2Bが非駆動のため係合していない(OFF)。
【0068】
そして、イグニッションをONにした後、EV発進、EVクルーズなどモータ効率のよい前進低車速時は、後輪駆動装置1による後輪駆動となる。図7に示すように、電動機2A、2Bが順方向に回転するように力行駆動すると、サンギヤ21A、21Bには順方向のトルクが付加される。このとき、前述したように一方向クラッチ50が係合しリングギヤ24A、24Bがロックされる。これによりプラネタリキャリア23A、23Bは順方向に回転し前進走行がなされる。なお、プラネタリキャリア23A、23Bには車軸10A、10Bからの走行抵抗が逆方向に作用している。このように車両の発進時には、イグニッションをONにして電動機2A、2Bのトルクをあげることで、一方向クラッチ50が機械的に係合してリングギヤ24A、24Bがロックされる。
【0069】
このとき油圧ブレーキ60A、60Bは弱締結状態となるように制御される。電動機2A、2Bの順方向の回転動力が車輪Wr側に入力されるときには一方向クラッチ50が係合状態となり、一方向クラッチ50のみで動力伝達可能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bも弱締結状態とし電動機2A、2B側と後輪Wr側とを接続状態としておくことで、電動機2A、2B側からの順方向の回転動力の入力が一時的に低下して一方向クラッチ50が非係合状態となった場合にも、電動機2A、2B側と後輪Wr側とで動力伝達不能になることを抑制できる。また、後述する減速回生への移行時に電動機2A、2B側と後輪Wr側とを接続状態とするための回転数制御が不要となる。このときの油圧ブレーキ60A、60Bの締結力は、後述する減速回生時や後進時と比べて弱い締結力となっている。一方向クラッチ50が係合状態のときの油圧ブレーキ60A、60Bの締結力を一方向クラッチ50が非係合状態のときの油圧ブレーキ60A、60Bの締結力よりも弱くすることにより、油圧ブレーキ60A、60Bの締結のための消費電力が低減される。
【0070】
前進低車速走行から車速があがりエンジン効率のよい前進中車速走行に至ると、後輪駆動装置1による後輪駆動から前輪駆動装置6による前輪駆動となる。図8に示すように、電動機2A、2Bの力行駆動が停止すると、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行しようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0071】
このとき油圧ブレーキ60A、60Bは弱締結状態となるように制御される。後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときには一方向クラッチ50は非係合状態となり、一方向クラッチ50のみで動力伝達不能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bを弱締結させ、電動機2A、2B側と後輪Wr側とを接続状態としておくことで動力伝達可能な状態に保つことができ、後述する減速回生時への移行時に回転数制御が不要となる。なお、このときの油圧ブレーキ60A、60Bの締結力も、後述する減速回生時や後進時と比べて弱い締結力となっている。
【0072】
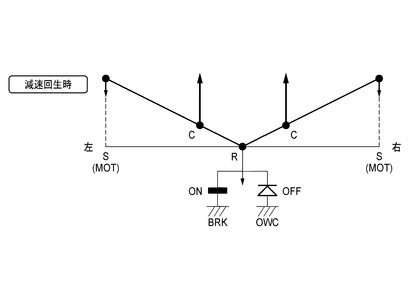
図7の状態から電動機2A、2Bを回生駆動しようすると、図9に示すように、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行を続けようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0073】
このとき油圧ブレーキ60A、60Bは締結状態(ON)となるように制御される。従って、リングギヤ24A、24Bが固定されるとともに電動機2A、2Bには逆方向の回生制動トルクが作用し、電動機2A、2Bで減速回生がなされる。後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときには一方向クラッチ50は非係合状態となり、一方向クラッチ50のみで動力伝達不能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bを締結させ、電動機2A、2B側と後輪Wr側とを接続状態としておくことで動力伝達可能な状態に保つことができ、この状態で電動機2A、2Bを回生駆動状態に制御することにより、車両のエネルギーを回生することができる。
【0074】
続いて加速時には、前輪駆動装置6と後輪駆動装置1の四輪駆動となり、後輪駆動装置1は、図7に示す前進低車速時と同じ状態となる。
【0075】
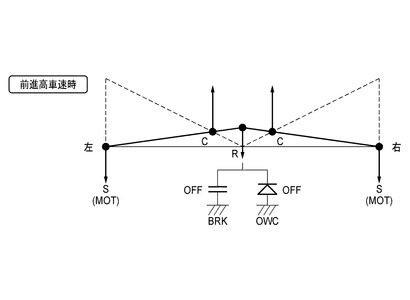
前進高車速時には、前輪駆動装置6による前輪駆動となる。図10に示すように、電動機2A、2Bが力行駆動を停止すると、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行しようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0076】
このとき油圧ブレーキ60A、60Bは解放状態(OFF)となるように制御される。従って、電動機2A、2Bの連れ回りが防止され、前輪駆動装置6による高車速時に電動機2A、2Bが過回転となるのが防止される。
【0077】
次に、本実施形態の車両3における後進走行について詳細に説明する。
車両3を後進させる方法としては、機構上、前輪駆動装置6による前輪駆動を行なうか、後輪駆動装置1による後輪駆動を行なうか、又は前輪駆動装置6と後輪駆動装置1による四輪駆動を行なうことが考えられる。しかしながら、一方向クラッチ50は、後輪Wr側の逆方向の回転動力が電動機2A、2B側に入力されるときに係合状態となるため、前輪駆動装置6による前輪駆動で後進した場合には、電動機2A、2Bが連れまわされるため電動機2A、2Bのフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞がある。そこで、本発明においては、後進走行時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させる、言い換えると、後輪駆動装置1による後輪駆動(以下、後輪後進状態とも呼ぶ。)か、又は前輪駆動装置6と後輪駆動装置1による四輪駆動で後進させる(以下、前後輪後進状態とも呼ぶ。)こととし、前輪駆動装置6の駆動力のみによる後進駆動を禁止している。
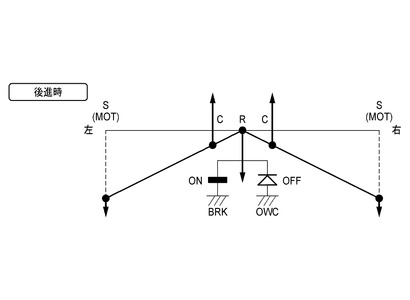
【0078】
従って後進時に、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させるため電動機2A、2Bを逆力行駆動すると、図11に示すように、サンギヤ21A、21Bには逆方向のトルクが付加される。このとき、一方向クラッチ50が非係合状態となるとともに、油圧ブレーキ60A、60Bは締結状態となるように制御される。従って、リングギヤ24A、24Bが固定されて、プラネタリキャリア23A、23Bは逆方向に回転し後進走行がなされる。なお、プラネタリキャリア23A、23Bには車軸10A、10Bからの走行抵抗が順方向に作用している。
【0079】
また、前後進制御装置としてのECU45は、好ましくは、路面状態取得手段と、後進意思取得手段と、スリップ状態取得手段と、蓄電状態取得手段、蓄電装置温度取得手段とから情報を取得可能に構成され、路面状態取得手段から得られた路面の傾斜状態や摩擦状態、スリップ状態取得手段から得られたスリップ状態等に基づいて後輪後進状態と前後輪後進状態との切り替えを制御している。また、ECU45は、前後輪後進状態又は後輪後進状態で後進する際には、蓄電状態取得手段から得られたバッテリ9のSOCに応じて前輪駆動装置6の内燃機関4と電動機5とを制御したり、蓄電装置温度取得手段から得られたバッテリ9の温度に応じて前輪駆動装置6の電動機5の発電電力量を制御している。なお、「取得」とは、「推定」又は「検出」による取得の両者を含む概念である。
【0080】
ここで、路面状態取得手段は、不図示の傾斜センサ及び/又はGPS衛星から受信した位置情報とメモリに記憶された地図データ等から傾斜状態を取得可能に構成され、さらに駆動輪(前輪走行時では前輪Wf,後輪走行時では後輪Wr、四輪走行時では前後輪Wf,Wr)の駆動力を検出する駆動力検出部と、駆動輪のスリップ率を検出するスリップ率検出部と、駆動輪の駆動力とスリップ率の相関関係に基づいて路面のμ(摩擦係数)を検出するμ検出部から路面の摩擦状態を検出可能に構成される。
【0081】
スリップ状態取得手段は、各車輪に設けられた車輪速度センサから例えば前輪Wfと後輪Wrの速度差を算出し、該速度差が所定の閾値以下であればスリップなしと判定し、閾値を超えた場合にはスリップありと判定することで車両3のスリップ状態が検出される。後進意思取得手段は、シフトポジションがリバース位置にあるか否かにより運転者の後進意思を判定するものであり、蓄電状態取得手段は、バッテリ9に設けられた公知の蓄電状態又は残容量状態を検出する検出器である。蓄電装置温度取得手段は、バッテリ9に設けられたバッテリ温度を検出する検出器である。
【0082】
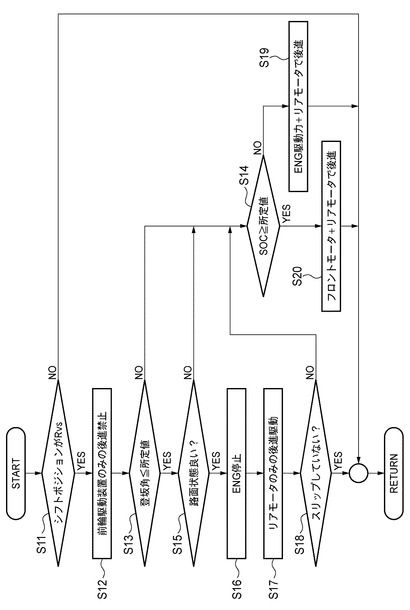
次に車両後進時の制御フローについて図12を参照して説明する。
先ず、シフトポジションがリバース(Rvs)位置にあるか否かを検出する(S11)。その結果、シフトポジションがリバース位置になければ処理を終了する。また、シフトポジションがリバース位置にあれば、ECU45は前輪駆動装置6による前輪駆動を禁止し(S12)、路面傾斜状態判定処理(S13)に進む。路面傾斜状態判定処理(S13)では、ECU45は、路面状態取得手段から取得した登坂角が所定値以下か否かを検出する(S13)。その結果、登坂角が所定値以下でない、即ち登坂角が所定値より大きい登坂であると判定された場合にはSOC判定処理に進む(S14)。一方、登坂角が所定値以下、即ち平地と判定された場合には路面摩擦状態取得処理に進む(S15)。
【0083】
路面摩擦状態取得処理(S15)では、路面状態取得手段から取得したμから滑りやすさを判定し、滑りやすいと判定された場合にはSOC判定処理に進む(S14)。一方、滑りにくいと判定された場合には内燃機関4が駆動中であれば停止(ENG停止)し、非駆動であれば停止(ENG停止)を維持し(S16)、後輪駆動装置1の電動機2A、2B(リヤモータ)のみの後輪後進状態で後進する(S17)。後輪後進状態で後進中には、スリップ状態判定処理(S18)が行なわれる。スリップ状態判定処理(S18)では、スリップ状態取得手段から取得したスリップ状態に基づいて、スリップが検出された場合にはSOC判定処理に進む(S14)。また、スリップ状態が検出されなければ後輪後進状態を維持する。
【0084】
SOC判定処理(S14)では、ECU45は、SOCが所定値以上か否かの判定を行い、SOCが所定値以上でない、即ちSOCが所定値より少ない場合には、前輪駆動装置6の内燃機関4と後輪駆動装置1の電動機2A、2Bとの前後輪後進状態(AWD後進)で後進する(S19)。一方、SOCが所定値以上である場合には、前輪駆動装置6の電動機5と後輪駆動装置1の電動機2A、2Bとの前後輪後進状態(AWD後進)で後進する(S20)。
【0085】
なお、図12に記載した制御フローは、必ずしもこれに限定されるものではなく、例えばS15の路面摩擦状態判定処理とS18のスリップ状態判定はいずれか一方を備えていればよい。さらに、S12、S15、S16、S18は省略することもできる。
【0086】
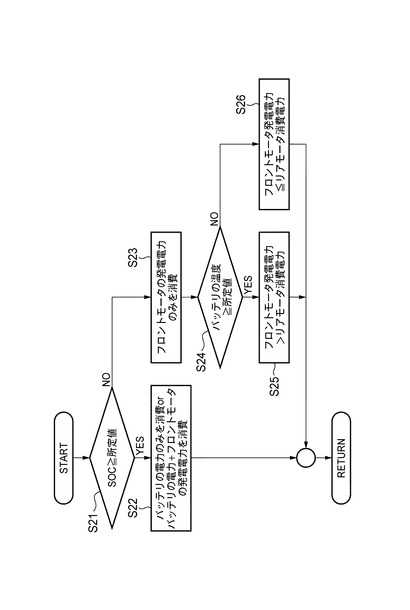
次に後輪後進状態(S17)における電力制御について図13を参照して説明する。
先ず、SOC判定処理(S21)では、ECU45は、SOCが所定値以上か否かの判定を行い、SOCが所定値以上である場合には、後輪駆動装置1の電動機2A、2Bはバッテリ9からの電力のみ、又は、バッテリ9からの電力と前輪駆動装置6の電動機5の発電電力を足し合わせた電力を消費して駆動される(S22)。
【0087】
一方、SOCが所定値以上でない、即ちSOCが所定値より少ない(低蓄電状態)場合には、前輪駆動装置6の電動機5の発電電力のみを消費して駆動される(S23)。なお、SOC判定処理(S21)での所定値は、SOC判定処理(S14)での所定値とは異なるものである。続いて、バッテリ9の温度検出処理がなされる(S24)。その結果、バッテリ温度が所定値以上であれば、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力よりも大きくなるように制御される(S25)。これにより、前輪駆動装置6の電動機5の発電電力から後輪駆動装置1の電動機2A、2Bによる消費電力を差し引いた電力がバッテリ9に蓄電される。
【0088】
一方、温度検出処理(S24)の結果、バッテリ温度が所定値より低い(低蓄電装置温度)場合、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力を超えないように制御される。これにより、低温時におけるバッテリ9の不具合を防止できる。なお、このとき、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力と後輪駆動装置1の電動機2A、2Bによる消費電力とが等しくなるように制御されることが好ましい。
【0089】
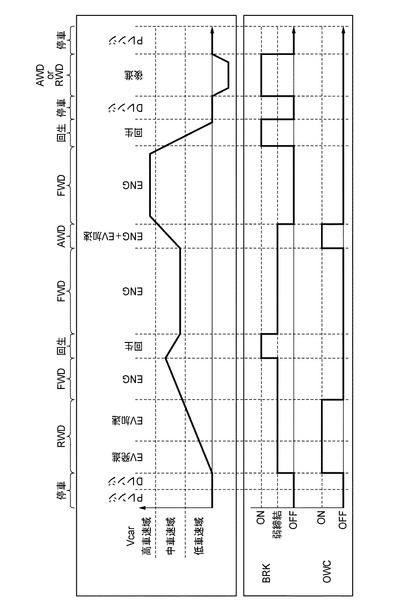
図14は、車両が停車中の状態からEV発進→EV加速→エンジン加速→減速回生→中速クルーズ→加速→高速クルーズ→減速回生→停車→後進→停車に至る際の電動オイルポンプ70(EOP)と、一方向クラッチ50(OWC)、油圧ブレーキ60A、60B(BRK)のタイミングチャートである。
【0090】
先ず、イグニッションをONにしてシフトがPレンジからDレンジに変更され、アクセルペダルが踏まれるまでは、一方向クラッチ50は非係合(OFF)、油圧ブレーキ60A、60Bは解放(OFF)状態を維持するように制御される。そこから、アクセルペダルが踏まれると後輪駆動(RWD)で後輪駆動装置1によるEV発進、EV加速がなされる。このとき、一方向クラッチ50が係合(ON)し、油圧ブレーキ60A、60Bは弱締結状態に制御される。そして、車速が低車速域から中車速域に至って後輪駆動から前輪駆動になると内燃機関4によるENG走行(FWD)がなされる。このとき、一方向クラッチ50が非係合(OFF)となり、油圧ブレーキ60A、60Bはそのままの状態が維持される。そして、ブレーキが踏まれるなど減速回生時には、一方向クラッチ50が非係合(OFF)のまま、油圧ブレーキ60A、60Bが締結(ON)状態に制御される。内燃機関4による中速クルーズ中は、上述のENG走行と同様の状態となる。続いて、さらにアクセルペダルが踏まれて前輪駆動から四輪駆動(AWD)になると、再び一方向クラッチ50が係合(ON)する。そして、車速が中車速域から高車速域に至ると、再び内燃機関4によるENG走行(FWD)がなされる。このとき、一方向クラッチ50が非係合(OFF)となり、油圧ブレーキ60A、60Bが解放(OFF)状態に制御される。そして、減速回生時には、上述した減速回生時と同様の状態となる。そして、車両が停止すると、一方向クラッチ50は非係合(OFF)、油圧ブレーキ60A、60Bは解放(OFF)状態に制御される。
【0091】
続いて、後進走行時には、後輪駆動(RWD)又は四輪駆動(AWD)とすることで一方向クラッチ50は非係合(OFF)のまま、油圧ブレーキ60A、60Bが締結(ON)状態に制御される。そして、車両が停止すると、再び一方向クラッチ50は非係合(OFF)となり、油圧ブレーキ60A、60Bは解放(OFF)状態に制御される。
【0092】
以上説明したように、本実施形態によれば、車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、その際、ECU45は、油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。言い換えると、ECU45は、車両後進時に前輪駆動装置6の駆動力のみによる後進駆動を禁止する。従って、前輪駆動装置6の後進禁止手段としての機能も有している。車両後進時に前輪駆動装置6の後進駆動力のみで後進すると一方向クラッチ50が係合状態となって、電動機2A、2Bのフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるが、少なくとも後輪駆動装置1の後進駆動力を発生させて後進することにより、車両エネルギ効率や後進走行性能の悪化を抑制できる。
【0093】
また、本実施形態によれば、ECU45は、車両後進時に、後輪駆動装置1のみに後進駆動力を発生させる後輪後進状態と、後輪駆動装置1及び前輪駆動装置6に後進駆動力を発生させる前後輪後進状態とを切り替えることにより、車両エネルギ効率や走行状況に応じた適切な後進を行うことができる。
【0094】
また、本実施形態によれば、ECU45は路面状態を推定または検出する路面状態取得手段からの路面状態に基づいて切り替えを行うことにより、さらに適切な後進が可能となる。路面状態は、路面の傾斜状態としてもよく、その際、後進方向の傾斜が所定値より大きいときに前後輪後進状態とすることにより、急な登坂であってもスリップの発生や、登坂できなくなることを防止、又は抑制できる。また、所定値以下のときには、後輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0095】
さらに、路面状態は、路面の摩擦状態としてもよく、その際、所定の摩擦状態よりも低い低摩擦状態のときに前後輪後進状態とすることにより、雪道等であってもスリップの発生を防止、又は抑制できる。また、高摩擦状態のときには、後輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0096】
また、本実施形態によれば、ECU45は車両運転者の後進意思を検出または推定する後進意思取得手段からの後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことにより、後進開始時のスリップを抑制できる。
【0097】
また、本実施形態によれば、ECU45は後輪後進状態での後進時に、後輪Wrのスリップを推定もしくは検出するスリップ状態取得手段からスリップ状態が取得されたときに前後輪後進状態に切り替えるので、後輪後進状態での後進走行中のスリップを早期に解消できる。
【0098】
また、本実施形態によれば、ECU45は電動機2A、2B及び電動機5へ電力を供給するバッテリ9のSOCを推定もしくは検出する蓄電状態取得手段からのSOCに基づいて前輪駆動装置6の内燃機関4と電動機5とを制御するので、車両エネルギ効率、走破性などを適切に制御することができる。特に、SOCが所定値より低いときに、ECU45は、内燃機関4のみから駆動力を発生させるように前輪駆動装置6を制御することにより、前輪駆動装置6の電動機5からは駆動力を発生させず、バッテリ9の電力を後輪駆動装置1の電動機2A、2Bのみに供給可能となるので、SOCが低い場合にも前後輪後進が可能となる。また、SOCが所定値以上のときに、少なくとも電動機5から駆動力を発生させるように前輪駆動装置6を制御することにより、内燃機関4の負荷を低減でき、車両エネルギ効率を向上できる。この際、電動機5から駆動力を発生させかつ内燃機関4を停止させるように前輪駆動装置6を制御してもよい。内燃機関4を停止させることで、さらに車両エネルギ効率を向上できる。
【0099】
また、本実施形態によれば、ECU45は後輪後進状態での後進時に、後輪駆動装置1の電動機2A、2Bを、前輪駆動装置6の電動機5の発電電力とバッテリ9の電力の少なくとも一方を選択的に消費して駆動するので、バッテリ9の状態や前輪駆動装置6の電動機5の状態に応じて後輪駆動装置1の電動機2A、2Bの駆動を適切に行うことができる。例えば、バッテリ温度が所定値より低いときに、ECU45は、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力を超えないように制御することにより、発電電力が消費電力に対し過剰とならないので、低温時にバッテリ9に電力が流入することを抑制することができる。このとき、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力と後輪駆動装置1の電動機2A、2Bによる消費電力とが等しくなるように制御することで、発電電力が消費電力に対し不足とならないので、後輪駆動装置1の電動機2A、2Bで所望の駆動力を出力することができる。
【0100】
また、例えばバッテリ9が低蓄電状態のときに、ECU45は前輪駆動装置6の電動機5による発電電力のみを後輪駆動装置1の電動機2A、2Bへ供給するよう制御することにより、バッテリ9から電力を持ち出すことなく、後輪駆動装置1の電動機2A、2Bを駆動することができる。さらに、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力よりも大きくなるように制御することにより、後輪駆動装置1の電動機2A、2Bで所望の駆動力を出力しつつバッテリ9を充電することができる。
【0101】
尚、本発明は、上述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。
例えば、本実施形態の後輪駆動装置1は、2つの電動機2A、2Bにそれぞれ遊星歯車式減速機12A、12Bを設け、それぞれ左後輪LWrと右後輪RWrの制御するように構成したが、これに限定されず、図15に示すように1つの電動機2Cと1つの減速機12Cを不図示の差動装置に接続して構成してもよい。
【0102】
また、例えば、本実施形態の後輪駆動装置1は、電動機2A、2Bと後輪Wr(RWr、LWr)との伝達系路上に遊星歯車式減速機12A、12Bを備えたものを例示したが、必ずしも遊星歯車式減速機12A、12B等の変速機を備えている必要はない。
また、断接手段として油圧ブレーキ60A、60Bを例示したが、機械式等公知の断接手段を用いてもよい。
【0103】
また、車両3は、前輪駆動装置6を内燃機関4を用いずに電動機5を唯一の駆動源とする電気自動車でもよい。
また、ECU45は、後輪駆動装置1の電動機2A、2Bと油圧ブレーキ60A、60Bを制御する駆動装置1用のECUと、駆動装置6の内燃機関4と電動機5とを制御する駆動装置6用のECUと、駆動装置1と駆動装置6とを制御する前後進制御装置としてのECUとをそれぞれ備えていてもよい。さらに、駆動装置1用のECUは、電動機2A,2Bを制御する電動機ECUと、油圧ブレーキ60A、60Bを制御する断接手段ECUをそれぞれ備えていてもよい。
また、前輪駆動装置6の電動機5と後輪Wr側の後輪駆動装置1の電動機2A、2Bは、異なるバッテリに接続されていてもよい。
【符号の説明】
【0104】
1 後輪駆動装置(第1駆動装置)
2A、2B、2C 電動機
4 内燃機関
5 電動機(他の電動機)
6 前輪駆動装置(第2駆動装置)
9 バッテリ
45 ECU(電動機制御装置、断接手段制御装置、後進制御装置)
50 一方向クラッチ(一方向動力伝達手段)
60A、60B 油圧ブレーキ(断接手段)
LWr 左後輪(第1駆動輪)
RWr 右後輪(第1駆動輪)
Wr 後輪(第1駆動輪)
LWf 左前輪(第2駆動輪)
RWf 右前輪(第2駆動輪)
Wf 前輪(第2駆動輪)
【技術分野】
【0001】
本発明は、前輪駆動装置と後輪駆動装置とを備えた前後輪駆動車両に関する。
【背景技術】
【0002】
特許文献1に記載の車両100は、図16に示すように、前輪がエンジン等の主駆動源(図示せず)により駆動されるようになっており、後輪102が補助駆動源である電動機103により動力伝達機構104を介して駆動されるようになっている。
【0003】
この動力伝達機構104は、電動機103からの動力を入力する減速機構105と、減速機構105から出力される動力を左右の後輪102,102に分配する差動歯車106とから構成されている。減速機構105は、電動機103の出力軸に固定された第1ギヤ105aと、第1ギヤ105aに噛合する第2ギヤ105bと、差動歯車106の入力ギヤ106aに噛合する第3ギヤ105cとからなる減速ギヤ列で構成されている。そして、第2ギヤ105bと第3ギヤ105cとの間には油圧クラッチ107が設けられており、油圧クラッチ107を係合したときに第2ギヤ105bと第3ギヤ105cとが連結されて、動力伝達機構104を介して電動機103の動力を後輪102に伝達可能になり、油圧クラッチ107を解放したときに第2ギヤ105bと第3ギヤ105cとの連結が解かれて、電動機103の動力の後輪102への伝達が遮断される。
【0004】
しかしながら、特許文献1に記載の動力伝達機構104では、電動機103の動力を後輪102に伝達するためには、油圧クラッチ107を動力伝達可能に強固に係合させてトルク容量の大きい状態に維持する必要があるため、例えば油温が低い場合などに応答遅れが生じる虞があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−258279号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
その対策として、例えば動力伝達機構104にさらに一方向クラッチを設け、車両が前進する際に係合するように構成することが考えられるが、電動機103が停止状態でエンジン等の主駆動源により前輪駆動で車両が後進すると、一方向クラッチはその構造上係合してしまう。この一方向クラッチの意図しない係合により、車両後進時には電動機103が連れまわされ車両エネルギ効率の悪化等が生じるおそれがあった。
【0007】
本発明は、上記課題に鑑みてなされたものであり、車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1に記載の発明は、
前輪および後輪の一方である第1駆動輪(例えば、後述の実施形態の後輪Wr)を駆動する第1駆動装置(例えば、後述の実施形態の後輪駆動装置1)と、該前輪および後輪の他方である第2駆動輪(例えば、後述の実施形態の前輪Wf)を駆動する第2駆動装置(例えば、後述の実施形態の前輪駆動装置6)と、を備えた前後輪駆動車両(例えば、後述の実施形態の車両3)であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機(例えば、後述の実施形態の電動機2A、2B、2C)と、
前記電動機を制御する電動機制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段(例えば、後述の実施形態の油圧ブレーキ60A、60B)と、
前記断接手段を制御する断接手段制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段(例えば、後述の実施形態の一方向クラッチ50)と、を備え、
車両後進時には、少なくとも前記第1駆動装置に後進駆動力を発生させて後進させ、
前記第1駆動装置に後進駆動力を発生させるときに、前記断接手段制御装置は前記断接手段を締結して電動機側と第1駆動輪側とを接続状態にし、前記電動機制御装置は前記電動機を逆方向の回転動力が発生するよう駆動することを特徴とする。
【0009】
また、請求項2に記載の発明は、請求項1に記載の構成に加えて、
車両後進時に、前記第1駆動装置のみに後進駆動力を発生させる一方輪後進状態(例えば、後述の実施形態の後輪後進状態)と、前記第1駆動装置及び前記第2駆動装置に後進駆動力を発生させる前後輪後進状態(例えば、後述の実施形態の前後輪後進状態)とを切り替える後進制御装置(例えば、後述の実施形態のECU45)を備えることを特徴とする。
【0010】
また、請求項3に記載の発明は、請求項2に記載の構成に加えて、
路面状態を推定または検出する路面状態取得手段をさらに備え、
前記後進制御装置は、路面状態に基づいて前記切り替えを行うことを特徴とする。
【0011】
また、請求項4に記載の発明は、請求項3に記載の構成に加えて、
前記路面状態は路面の傾斜状態であって、前記路面の傾斜状態に基づいて前記切り替えを行うことを特徴とする。
【0012】
また、請求項5に記載の発明は、請求項4に記載の構成に加えて、
前記後進制御装置は、後進方向の傾斜が所定値より大きいときに、前記前後輪後進状態とすることを特徴とする。
【0013】
また、請求項6に記載の発明は、請求項3に記載の構成に加えて、
前記路面状態は路面の摩擦状態であって、前記路面の摩擦状態に基づいて前記切り替えを行うことを特徴とする。
【0014】
また、請求項7に記載の発明は、請求項6に記載の構成に加えて、
前記後進制御装置は、所定の摩擦状態よりも低い低摩擦状態のときに、前記前後輪後進状態とすることを特徴とする。
【0015】
また、請求項8に記載の発明は、請求項2〜7のいずれか1項に記載の構成に加えて、
車両運転者の後進意思を検出または推定する後進意思取得手段をさらに備え、
前記後進制御装置は、前記後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことを特徴とする。
【0016】
また、請求項9に記載の発明は、請求項2〜8のいずれか1項に記載の構成に加えて、
前記一方輪後進状態での後進時に、前記第1駆動輪のスリップを推定もしくは検出するスリップ状態取得手段をさらに備え、
前記後進制御装置は、スリップ状態が取得されたときに前記前後輪後進状態に切り替えることを特徴とする。
【0017】
また、請求項10に記載の発明は、請求項2〜9のいずれか1項に記載の構成に加えて、
前記第2駆動装置は、車両の駆動力を発生する内燃機関(例えば、後述の実施形態の内燃機関4)と他の電動機(例えば、後述の実施形態の電動機5)とを備え、
前記前後輪駆動車両は、前記電動機及び前記他の電動機へ電力を供給する蓄電装置(例えば、後述の実施形態のバッテリ9)の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記後進制御装置は、前記前後輪後進状態での後進時に、前記蓄電状態に基づいて前記第2駆動装置の前記内燃機関と前記他の電動機とを制御することを特徴とする。
【0018】
また、請求項11に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値より低いときに、前記後進制御装置は、前記内燃機関のみから駆動力を発生させるように前記第2駆動装置を制御することを特徴とする。
【0019】
また、請求項12に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値以上のときに、前記後進制御装置は、少なくとも前記他の電動機から駆動力を発生させるように前記第2駆動装置を制御することを特徴とする。
【0020】
また、請求項13に記載の発明は、請求項10に記載の構成に加えて、
前記蓄電状態が所定値以上のときに、前記後進制御装置は、前記電動機から駆動力を発生させかつ前記内燃機関を停止させるように前記第2駆動装置を制御することを特徴とする。
【0021】
また、請求項14に記載の発明は、請求項1〜9のいずれか1項に記載の構成に加えて、
前記第2駆動装置は、車両の駆動力を発生する内燃機関(例えば、後述の実施形態の内燃機関4)と他の電動機(例えば、後述の実施形態の電動機5)とを備え、
前記前後輪駆動車両は、前記他の電動機による発電電力を蓄電する蓄電装置(例えば、後述の実施形態のバッテリ9)と、前記電動機への電力供給を制御する電力供給制御装置(例えば、後述の実施形態のECU45)と、をさらに備え、
前記電動機は、前記他の電動機の発電電力と前記蓄電装置の電力の少なくとも一方を消費して駆動されることを特徴とする。
【0022】
また、請求項15に記載の発明は、請求項14に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の温度を推定もしくは検出する蓄電装置温度取得手段をさらに備え、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力を超えないように制御することを特徴とする。
【0023】
また、請求項16に記載の発明は、請求項15に記載の構成に加えて、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力と前記電動機による消費電力とが等しくなるように制御することを特徴とする。
【0024】
また、請求項17に記載の発明は、請求項14に記載の構成に加えて、
前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力よりも大きくなるように制御することを特徴とする。
【0025】
また、請求項18に記載の発明は、請求項14に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が電動機による消費電力よりも大きくなるように制御することを特徴とする。
【0026】
また、請求項19に記載の発明は、請求項14に記載の構成に加えて、
前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする。
【0027】
また、請求項20に記載の発明は、請求項19に記載の構成に加えて、
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする。
【0028】
上記の目的を達成するために、請求項21に記載の発明は、
前輪および後輪の一方である第1駆動輪(例えば、後述の実施形態の後輪Wr)を駆動する第1駆動装置(例えば、後述の実施形態の後輪駆動装置1)と、該前輪および後輪の他方である第2駆動輪(例えば、後述の実施形態の前輪Wf)を駆動する第2駆動装置(例えば、後述の実施形態の前輪駆動装置6)と、を備えた前後輪駆動車両(例えば、後述の実施形態の車両3)であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機(例えば、後述の実施形態の電動機2A、2B、2C)と、
前記電動機を制御する電動機制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段(例えば、後述の実施形態の油圧ブレーキ60A、60B)と、
前記断接手段を制御する断接手段制御装置(例えば、後述の実施形態のECU45)と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段(例えば、後述の実施形態の一方向クラッチ50)と、を備え、
車両後進時に、前記第2駆動装置の駆動力のみによる後進駆動を禁止する後進禁止手段を備えることを特徴とする。
【発明の効果】
【0029】
請求項1に記載の発明によれば、車両後進時に第2駆動装置の後進駆動力のみで後進すると一方向動力伝達手段が係合状態となって、電動機のフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるが、少なくとも第1駆動装置の後進駆動力を発生させて後進することにより、車両エネルギ効率(燃費・電費)や後進走行性能の悪化を抑制できる。
【0030】
請求項2に記載の発明によれば、一方輪後進と前後輪後進とを切り替えて用いることで、車両エネルギ効率や走行状況に応じた適切な後進を行うことができる。
【0031】
請求項3に記載の発明によれば、路面状態に基づいて切り替えを行うことで、さらに適切な後進が可能となる。
【0032】
請求項4に記載の発明によれば、路面の傾斜状態に基づいて切り替えを行うことで、傾斜状態に応じた適切な切り替えをすることが可能となる。
【0033】
請求項5に記載の発明によれば、後進登坂が所定値より大きいときに、前後輪後進状態とすることで、スリップの発生や、登坂できなくなることを防止、又は抑制できる。また、所定値以下のときには、一方輪後進とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0034】
請求項6に記載の発明によれば、路面の摩擦状態に基づいて切り替えを行うことで、摩擦状態に応じた適切な切り替えをすることが可能となる。
【0035】
請求項7に記載の発明によれば、雪道等の低摩擦状態のときに、前後輪後進とすることで、スリップの発生を防止、又は抑制できる。また、高摩擦状態のときには、一方輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0036】
請求項8に記載の発明によれば、後進開始前に切り替え判定をするので、後進開始時のスリップを抑制できる。
【0037】
請求項9に記載の発明によれば、一方輪後進状態での後進走行中にスリップを検出したときに、前後輪後進状態による後進走行とすることでスリップを早期に解消できる。
【0038】
請求項10に記載の発明によれば、蓄電装置の蓄電状態に基づいて第2駆動装置の内燃機関と他の電動機とを制御することで、車両エネルギ効率、走破性などを適切に制御することができる。
【0039】
請求項11に記載の発明によれば、蓄電状態が所定値より低い場合に、第2駆動装置の他の電動機からは駆動力を発生させず、蓄電装置の電力を第1駆動装置の電動機のみに供給可能となるので、蓄電状態が低い場合にも前後輪後進が可能となる。
【0040】
請求項12に記載の発明によれば、蓄電状態が所定値以上のときに、少なくとも第2駆動装置の他の電動機から駆動力を発生させることでエンジンの負荷を低減でき、車両エネルギ効率を向上できる。
【0041】
請求項13に記載の発明によれば、蓄電状態が所定値以上のときに、内燃機関を停止させることで、さらに車両エネルギ効率を向上できる。
【0042】
請求項14に記載の発明によれば、電力供給制御装置によって第1駆動装置の電動機への電力供給源を制御することによって、蓄電装置の状態や第2駆動装置の他の電動機の状態に応じて第1駆動装置の電動機の駆動を適切に行うことができる。
【0043】
請求項15に記載の発明によれば、発電電力が消費電力に対し過剰とならないので、低温時にバッテリに電力が流入することを抑制することができる。
【0044】
請求項16に記載の発明によれば、発電電力が消費電力に対し不足とならないので、第1駆動装置の電動機で所望の駆動力を出力することができる。
【0045】
請求項17に記載の発明によれば、第2駆動装置の他の電動機による発電電力が第1駆動装置の電動機の消費電力よりも大きくなるので、第1駆動装置の電動機で所望の駆動力を出力しつつ蓄電装置を充電することができる。
【0046】
請求項18に記載の発明によれば、低蓄電状態のときに蓄電装置を充電することが可能で、蓄電装置の蓄電状態を適切な範囲に維持することができる。
【0047】
請求項19に記載の発明によれば、蓄電装置から電力を持ち出すことなく、第1駆動装置の電動機を駆動することができる。
【0048】
請求項20に記載の発明によれば、低蓄電状態のときに第1駆動装置の電動機への電力供給を第2駆動装置の他の電動機の発電電力のみとすることで、それ以上の蓄電状態の低下を抑制できる。
【0049】
請求項21に記載の発明によれば、車両後進時に第2駆動装置の後進駆動力のみで後進すると一方向動力伝達手段が係合状態となって、電動機のフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるため、これを禁止することで車両エネルギ効率や後進走行性能の悪化を抑制できる。
【図面の簡単な説明】
【0050】
【図1】本発明に係る前後輪駆動車両の一実施形態であるハイブリッド車両の概略構成を示すブロック図である。
【図2】第1実施形態の後輪駆動装置の縦断面図である。
【図3】図2に示す後輪駆動装置の部分拡大図である。
【図4】後輪駆動装置がフレームに搭載された状態を示す斜視図である。
【図5】各車両状態における前輪駆動装置、後輪駆動装置、電動機、一方向クラッチ、油圧ブレーキの状態を記載した表である。
【図6】停車中の後輪駆動装置の速度共線図である。
【図7】前進低車速時の後輪駆動装置の速度共線図である。
【図8】前進中車速時の後輪駆動装置の速度共線図である。
【図9】減速回生時の後輪駆動装置の速度共線図である。
【図10】前進高車速時の後輪駆動装置の速度共線図である。
【図11】後進時の後輪駆動装置の速度共線図である。
【図12】車両後進時の制御フローを示すフロー図である。
【図13】後輪後進時の電力制御フローを示すフロー図である。
【図14】車両走行におけるタイミングチャートである。
【図15】変形例に係る後輪駆動装置を搭載した車両の概略構成を示すブロック図である。
【図16】特許文献1に記載の車両用駆動装置の概略図である。
【発明を実施するための形態】
【0051】
先ず、本発明に係る前後輪駆動車両の一実施形態を図1に基づいて説明する。
本発明に係る前後輪駆動車両3(以下、車両と呼ぶ。)は、図1に示すように、内燃機関4と電動機5が直列に接続された駆動装置6(以下、前輪駆動装置と呼ぶ。)を車両前部に有するハイブリッド車両であり、この前輪駆動装置6の動力がトランスミッション7を介して前輪Wf(RWf、LWf)に伝達される一方で、この前輪駆動装置6と別に車両後部に設けられた駆動装置1(以下、後輪駆動装置と呼ぶ。)の動力が後輪Wr(RWr、LWr)に伝達されるようになっている。前輪駆動装置6の電動機5と後輪Wr側の後輪駆動装置1の電動機2A、2Bは、PDU8(パワードライブユニット)を介してバッテリ9に接続され、バッテリ9からの電力供給と、バッテリ9へのエネルギー回生がPDU8を介して行われるようになっている。PDU8は後述するECU45に接続されている。なお、本実施形態では、駆動装置1を後輪駆動用とし駆動装置6を前輪駆動用として説明するが、駆動装置1を前輪駆動用とし駆動装置6を後輪駆動用としてもよい。
【0052】
図2は、後輪駆動装置1の全体の縦断面図を示すものであり、同図において、10A、10Bは、車両の後輪Wr側の左右の車軸であり、車幅方向に同軸上に配置されている。後輪駆動装置1の減速機ケース11は全体が略円筒状に形成され、その内部には、車軸駆動用の電動機2A、2Bと、この電動機2A、2Bの駆動回転を減速する遊星歯車式減速機12A、12Bとが、車軸10A、10Bと同軸上に配置されている。この電動機2A及び遊星歯車式減速機12Aは左後輪LWrを制御し、電動機2B及び遊星歯車式減速機12Bは右後輪RWrを制御し、電動機2A及び遊星歯車式減速機12Aと電動機2B及び遊星歯車式減速機12Bは、減速機ケース11内で車幅方向に左右対称に配置されている。そして、減速機ケース11は、図4に示すように、車両3の骨格となるフレームの一部であるフレーム部材13の支持部13a、13bと、不図示の後輪駆動装置1のフレームで支持されている。支持部13a、13bは、車幅方向でフレーム部材13の中心に対し左右に設けられている。なお、図4中の矢印は、後輪駆動装置1が車両に搭載された状態における位置関係を示している。
【0053】
減速機ケース11の左右両端側内部には、それぞれ電動機2A、2Bのステータ14A、14Bが固定され、このステータ14A、14Bの内周側に環状のロータ15A、15Bが回転可能に配置されている。ロータ15A、15Bの内周部には車軸10A、10Bの外周を囲繞する円筒軸16A、16Bが結合され、この円筒軸16A、16Bが車軸10A、10Bと同軸で相対回転可能となるように減速機ケース11の端部壁17A、17Bと中間壁18A、18Bに軸受19A、19Bを介して支持されている。また、円筒軸16A、16Bの一端側の外周であって減速機ケース11の端部壁17A、17Bには、ロータ15A、15Bの回転位置情報を電動機2A、2Bの制御コントローラ(図示せず)にフィードバックするためのレゾルバ20A、20Bが設けられている。
【0054】
また、遊星歯車式減速機12A、12Bは、サンギヤ21A、21Bと、このサンギヤ21に噛合される複数のプラネタリギヤ22A、22Bと、これらのプラネタリギヤ22A、22Bを支持するプラネタリキャリア23A、23Bと、プラネタリギヤ22A、22Bの外周側に噛合されるリングギヤ24A、24Bと、を備え、サンギヤ21A、21Bから電動機2A、2Bの駆動力が入力され、減速された駆動力がプラネタリキャリア23A、23Bを通して出力されるようになっている。
【0055】
サンギヤ21A、21Bは円筒軸16A、16Bに一体に形成されている。また、プラネタリギヤ22A、22Bは、例えば図3に示すように、サンギヤ21A、21Bに直接噛合される大径の第1ピニオン26A、26Bと、この第1ピニオン26A、26Bよりも小径の第2ピニオン27A、27Bを有する2連ピニオンであり、これらの第1ピニオン26A、26Bと第2ピニオン27A、27Bが同軸にかつ軸方向にオフセットした状態で一体に形成されている。このプラネタリギヤ22A、22Bはプラネタリキャリア23A、23Bに支持され、プラネタリキャリア23A、23Bは、軸方向内側端部が径方向内側に伸びて車軸10A、10Bにスプライン嵌合され一体回転可能に支持されるとともに、軸受33A、33Bを介して中間壁18A、18Bに支持されている。
【0056】
なお、中間壁18A、18Bは電動機2A、2Bを収容する電動機収容空間と遊星歯車式減速機12A、12Bを収容する減速機空間とを隔て、外径側から内径側に互いの軸方向間隔が広がるように屈曲して構成されている。そして、中間壁18A、18Bの内径側、且つ、遊星歯車式減速機12A、12B側にはプラネタリキャリア23A、23Bを支持する軸受33A、33Bが配置されるとともに中間壁18A、18Bの外径側、且つ、電動機2A、2B側にはステータ14A、14B用のバスリング41A、41Bが配置されている(図2参照)。
【0057】
リングギヤ24A、24Bは、その内周面が小径の第2ピニオン27A、27Bに噛合されるギヤ部28A、28Bと、ギヤ部28A、28Bより小径で減速機ケース11の中間位置で互いに対向配置される小径部29A、29Bと、ギヤ部28A、28Bの軸方向内側端部と小径部29A、29Bの軸方向外側端部を径方向に連結する連結部30A、30Bとを備えて構成されている。この実施形態の場合、リングギヤ24A、24Bの最大半径は、第1ピニオン26A、26Bの車軸10A、10Bの中心からの最大距離よりも小さくなるように設定されている。小径部29A、29Bは、それぞれ後述する一方向クラッチ50のインナーレース51とスプライン嵌合し、リングギヤ24A、24Bは一方向クラッチ50のインナーレース51と一体回転するように構成されている。
【0058】
ところで、減速機ケース11とリングギヤ24A、24Bの間には円筒状の空間部が確保され、その空間部内に、リングギヤ24A、24Bに対する制動手段を構成する油圧ブレーキ60A、60Bが第1ピニオン26A、26Bと径方向でオーバーラップし、第2ピニオン27A、27Bと軸方向でオーバーラップして配置されている。油圧ブレーキ60A、60Bは、減速機ケース11の内径側で軸方向に伸びる筒状の外径側支持部34の内周面にスプライン嵌合された複数の固定プレート35A、35Bと、リングギヤ24A、24Bの外周面にスプライン嵌合された複数の回転プレート36A、36Bが軸方向に交互に配置され、これらのプレート35A、35B,36A、36Bが環状のピストン37A、37Bによって締結及び解放操作されるようになっている。ピストン37A、37Bは、減速機ケース11の中間位置から内径側に延設された左右分割壁39と、左右分割壁39によって連結された外径側支持部34と内径側支持部40間に形成された環状のシリンダ室38A、38Bに進退自在に収容されており、シリンダ室38A、38Bへの高圧オイルの導入によってピストン37A、37Bを前進させ、シリンダ室38A、38Bからオイルを排出することによってピストン37A、37Bを後進させる。なお、油圧ブレーキ60A、60Bは図4に示すように、前述したフレーム部材13の支持部13a、13b間に配置された電動オイルポンプ70に接続されている。
【0059】
また、さらに詳細には、ピストン37A、37Bは、軸方向前後に第1ピストン壁63A、63Bと第2ピストン壁64A、64Bを有し、これらのピストン壁63A、63B、64A、64Bが円筒状の内周壁65A、65Bによって連結されている。したがって、第1ピストン壁63A、63Bと第2ピストン壁64A、64Bの間には径方向外側に開口する環状空間が形成されているが、この環状空間は、シリンダ室38A、38Bの外壁内周面に固定された仕切部材66A、66Bによって軸方向左右に仕切られている。減速機ケース11の左右分割壁39と第2ピストン壁64A、64Bの間は高圧オイルが直接導入される第1作動室S1(図5参照)とされ、仕切部材66A、66Bと第1ピストン壁63A、63Bの間は、内周壁65A、65Bに形成された貫通孔を通して第1作動室S1と導通する第2作動室S2(図5参照)とされている。第2ピストン壁64A、64Bと仕切部材66A、66Bの間は大気圧に導通している。
【0060】
この油圧ブレーキ60A、60Bでは、第1作動室S1と第2作動室S2に不図示の油圧回路からオイルが導入され、第1ピストン壁63A、63Bと第2ピストン壁64A、64Bに作用するオイルの圧力によって固定プレート35A、35Bと回転プレート36A、36Bを相互に押し付けが可能である。したがって、軸方向左右の第1,第2ピストン壁63A、63B、64A、64Bによって大きな受圧面積を稼ぐことができるため、ピストン37A、37Bの径方向の面積を抑えたまま固定プレート35A、35Bと回転プレート36A、36Bに対する大きな押し付け力を得ることができる。
【0061】
この油圧ブレーキ60A、60Bの場合、固定プレート35A、35Bが減速機ケース11から伸びる外径側支持部34に支持される一方で、回転プレート36A、36Bがリングギヤ24A、24Bに支持されているため、両プレート35A、35B、36A、36Bがピストン37A、37Bによって押し付けられると、両プレート35A、35B、36A、36B間の摩擦締結によってリングギヤ24A、24Bに制動力が作用し固定され、その状態からピストン37A、37Bによる締結が解放されると、リングギヤ24A、24Bの自由な回転が許容される。
【0062】
また、軸方向で対向するリングギヤ24A、24Bの連結部30A、30B間にも空間部が確保され、その空間部内に、リングギヤ24A、24Bに対し一方向の動力のみを伝達し他方向の動力を遮断する一方向クラッチ50が配置されている。一方向クラッチ50は、インナーレース51とアウターレース52との間に多数のスプラグ53を介在させたものであって、そのインナーレース51がスプライン嵌合によりリングギヤ24A、24Bの小径部29A、29Bと一体回転するように構成されている。またアウターレース52は、内径側支持部40により位置決めされるとともに、回り止めされている。一方向クラッチ50は、車両3が電動機2A、2Bの動力で前進する際に係合してリングギヤ24A、24Bの回転をロックするように構成されている。より具体的に説明すると、一方向クラッチ50は、電動機2A、2B側の順方向(車両3を前進させる際の回転方向)の回転動力が後輪Wr側に入力されるときに係合状態となるとともに電動機2A、2B側の逆方向の回転動力が後輪Wr側に入力されるときに非係合状態となり、後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときに非係合状態となるとともに後輪Wr側の逆方向の回転動力が電動機2A、2B側に入力されるときに係合状態となる。
【0063】
このように本実施形態の後輪駆動装置1では、電動機2A、2Bと後輪Wrとの動力伝達経路上に一方向クラッチ50と油圧ブレーキ60A、60Bとが並列に設けられている。なお、油圧ブレーキ60は、不図示の油圧回路に接続され、車両の走行状態や一方向クラッチ50の係合・非係合状態に応じて、オイルポンプ70から油圧回路を介して供給されるオイルの圧力により、解放状態、弱締結状態、締結状態に制御される。
【0064】
ここで、ECU45(図1参照)は、車両全体の各種制御をするための制御装置であり、ECU45には車速、操舵角、アクセルペダル開度AP、シフトポジション、蓄電状態(State of Charge 以下、SOCと呼ぶことがある。)などが入力される一方、ECU45からは、内燃機関4を制御する信号、電動機2A、2B、5を制御する信号、バッテリ9における充電状態・放電状態などを示す信号、油圧回路(不図示)を制御する信号、電動オイルポンプ70を制御する制御信号などが出力される。
【0065】
即ち、ECU45は、前輪駆動装置6による前輪駆動を行なうか、後輪駆動装置1による後輪駆動を行なうか、又は前輪駆動装置6と後輪駆動装置1による四輪駆動を行なうかを制御する前後進制御装置(前進時は前進制御装置、後進時は後進制御装置)としての機能と、電動機2A、2Bを制御する電動機制御装置としての機能と、断接手段としての油圧ブレーキ60A、60Bを制御する断接手段制御装置としての機能と、内燃機関4と電動機5を制御する前輪駆動源制御装置としての機能と、バッテリ9と電動機2A、2B、5間の電力供給及び電動機2A、2Bと電動機5間の電力供給を制御する電力供給制御装置としての機能とを、少なくとも備えている。
【0066】
図5は、各車両状態における前輪駆動装置6、後輪駆動装置1、電動機2A、2B、一方向クラッチ50、油圧ブレーキ60A、60Bの状態を記載した表である。図中、フロントユニットは前輪駆動装置6、リアユニットは後輪駆動装置1、リアモータは電動機2A、2B、OWCは一方向クラッチ50、BRKは油圧ブレーキ60A、60Bを表わす。また、図6〜図11は後輪駆動装置1の各状態における速度共線図を表わし、左側のS、Cはそれぞれ電動機2Aに連結された遊星歯車式減速機12Aのサンギヤ21A、車軸10Aに連結されたプラネタリキャリア23A、右側のS、Cはそれぞれ電動機2Bに連結された遊星歯車式減速機12Bのサンギヤ21B、車軸10Bに連結されたプラネタリキャリア23B、Rはリングギヤ24A、24B、BRKは油圧ブレーキ60A、60B、OWCは一方向クラッチ50を表わす。以下の説明において電動機2A、2Bによる車両前進時のサンギヤ21A、21Bの回転方向を順方向とする。また、図中、停車中の状態から上方が順方向の回転、下方が逆方向の回転であり、矢印は、上方が順方向のトルクを表し、下方が逆方向のトルクを表す。
【0067】
停車中は、前輪駆動装置6も後輪駆動装置1も駆動していない。従って、図6に示すように、後輪駆動装置1の電動機2A、2Bは停止しており、車軸10A、10Bも停止しているため、いずれの要素にもトルクは作用していない。この車両の停車中においては、油圧ブレーキ60A、60Bは解放(OFF)されている。また、一方向クラッチ50は、電動機2A、2Bが非駆動のため係合していない(OFF)。
【0068】
そして、イグニッションをONにした後、EV発進、EVクルーズなどモータ効率のよい前進低車速時は、後輪駆動装置1による後輪駆動となる。図7に示すように、電動機2A、2Bが順方向に回転するように力行駆動すると、サンギヤ21A、21Bには順方向のトルクが付加される。このとき、前述したように一方向クラッチ50が係合しリングギヤ24A、24Bがロックされる。これによりプラネタリキャリア23A、23Bは順方向に回転し前進走行がなされる。なお、プラネタリキャリア23A、23Bには車軸10A、10Bからの走行抵抗が逆方向に作用している。このように車両の発進時には、イグニッションをONにして電動機2A、2Bのトルクをあげることで、一方向クラッチ50が機械的に係合してリングギヤ24A、24Bがロックされる。
【0069】
このとき油圧ブレーキ60A、60Bは弱締結状態となるように制御される。電動機2A、2Bの順方向の回転動力が車輪Wr側に入力されるときには一方向クラッチ50が係合状態となり、一方向クラッチ50のみで動力伝達可能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bも弱締結状態とし電動機2A、2B側と後輪Wr側とを接続状態としておくことで、電動機2A、2B側からの順方向の回転動力の入力が一時的に低下して一方向クラッチ50が非係合状態となった場合にも、電動機2A、2B側と後輪Wr側とで動力伝達不能になることを抑制できる。また、後述する減速回生への移行時に電動機2A、2B側と後輪Wr側とを接続状態とするための回転数制御が不要となる。このときの油圧ブレーキ60A、60Bの締結力は、後述する減速回生時や後進時と比べて弱い締結力となっている。一方向クラッチ50が係合状態のときの油圧ブレーキ60A、60Bの締結力を一方向クラッチ50が非係合状態のときの油圧ブレーキ60A、60Bの締結力よりも弱くすることにより、油圧ブレーキ60A、60Bの締結のための消費電力が低減される。
【0070】
前進低車速走行から車速があがりエンジン効率のよい前進中車速走行に至ると、後輪駆動装置1による後輪駆動から前輪駆動装置6による前輪駆動となる。図8に示すように、電動機2A、2Bの力行駆動が停止すると、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行しようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0071】
このとき油圧ブレーキ60A、60Bは弱締結状態となるように制御される。後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときには一方向クラッチ50は非係合状態となり、一方向クラッチ50のみで動力伝達不能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bを弱締結させ、電動機2A、2B側と後輪Wr側とを接続状態としておくことで動力伝達可能な状態に保つことができ、後述する減速回生時への移行時に回転数制御が不要となる。なお、このときの油圧ブレーキ60A、60Bの締結力も、後述する減速回生時や後進時と比べて弱い締結力となっている。
【0072】
図7の状態から電動機2A、2Bを回生駆動しようすると、図9に示すように、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行を続けようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0073】
このとき油圧ブレーキ60A、60Bは締結状態(ON)となるように制御される。従って、リングギヤ24A、24Bが固定されるとともに電動機2A、2Bには逆方向の回生制動トルクが作用し、電動機2A、2Bで減速回生がなされる。後輪Wr側の順方向の回転動力が電動機2A、2B側に入力されるときには一方向クラッチ50は非係合状態となり、一方向クラッチ50のみで動力伝達不能であるが、一方向クラッチ50と並列に設けられた油圧ブレーキ60A、60Bを締結させ、電動機2A、2B側と後輪Wr側とを接続状態としておくことで動力伝達可能な状態に保つことができ、この状態で電動機2A、2Bを回生駆動状態に制御することにより、車両のエネルギーを回生することができる。
【0074】
続いて加速時には、前輪駆動装置6と後輪駆動装置1の四輪駆動となり、後輪駆動装置1は、図7に示す前進低車速時と同じ状態となる。
【0075】
前進高車速時には、前輪駆動装置6による前輪駆動となる。図10に示すように、電動機2A、2Bが力行駆動を停止すると、プラネタリキャリア23A、23Bには車軸10A、10Bから前進走行しようとする順方向のトルクが作用するので、前述したように一方向クラッチ50が非係合状態となる。
【0076】
このとき油圧ブレーキ60A、60Bは解放状態(OFF)となるように制御される。従って、電動機2A、2Bの連れ回りが防止され、前輪駆動装置6による高車速時に電動機2A、2Bが過回転となるのが防止される。
【0077】
次に、本実施形態の車両3における後進走行について詳細に説明する。
車両3を後進させる方法としては、機構上、前輪駆動装置6による前輪駆動を行なうか、後輪駆動装置1による後輪駆動を行なうか、又は前輪駆動装置6と後輪駆動装置1による四輪駆動を行なうことが考えられる。しかしながら、一方向クラッチ50は、後輪Wr側の逆方向の回転動力が電動機2A、2B側に入力されるときに係合状態となるため、前輪駆動装置6による前輪駆動で後進した場合には、電動機2A、2Bが連れまわされるため電動機2A、2Bのフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞がある。そこで、本発明においては、後進走行時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させる、言い換えると、後輪駆動装置1による後輪駆動(以下、後輪後進状態とも呼ぶ。)か、又は前輪駆動装置6と後輪駆動装置1による四輪駆動で後進させる(以下、前後輪後進状態とも呼ぶ。)こととし、前輪駆動装置6の駆動力のみによる後進駆動を禁止している。
【0078】
従って後進時に、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させるため電動機2A、2Bを逆力行駆動すると、図11に示すように、サンギヤ21A、21Bには逆方向のトルクが付加される。このとき、一方向クラッチ50が非係合状態となるとともに、油圧ブレーキ60A、60Bは締結状態となるように制御される。従って、リングギヤ24A、24Bが固定されて、プラネタリキャリア23A、23Bは逆方向に回転し後進走行がなされる。なお、プラネタリキャリア23A、23Bには車軸10A、10Bからの走行抵抗が順方向に作用している。
【0079】
また、前後進制御装置としてのECU45は、好ましくは、路面状態取得手段と、後進意思取得手段と、スリップ状態取得手段と、蓄電状態取得手段、蓄電装置温度取得手段とから情報を取得可能に構成され、路面状態取得手段から得られた路面の傾斜状態や摩擦状態、スリップ状態取得手段から得られたスリップ状態等に基づいて後輪後進状態と前後輪後進状態との切り替えを制御している。また、ECU45は、前後輪後進状態又は後輪後進状態で後進する際には、蓄電状態取得手段から得られたバッテリ9のSOCに応じて前輪駆動装置6の内燃機関4と電動機5とを制御したり、蓄電装置温度取得手段から得られたバッテリ9の温度に応じて前輪駆動装置6の電動機5の発電電力量を制御している。なお、「取得」とは、「推定」又は「検出」による取得の両者を含む概念である。
【0080】
ここで、路面状態取得手段は、不図示の傾斜センサ及び/又はGPS衛星から受信した位置情報とメモリに記憶された地図データ等から傾斜状態を取得可能に構成され、さらに駆動輪(前輪走行時では前輪Wf,後輪走行時では後輪Wr、四輪走行時では前後輪Wf,Wr)の駆動力を検出する駆動力検出部と、駆動輪のスリップ率を検出するスリップ率検出部と、駆動輪の駆動力とスリップ率の相関関係に基づいて路面のμ(摩擦係数)を検出するμ検出部から路面の摩擦状態を検出可能に構成される。
【0081】
スリップ状態取得手段は、各車輪に設けられた車輪速度センサから例えば前輪Wfと後輪Wrの速度差を算出し、該速度差が所定の閾値以下であればスリップなしと判定し、閾値を超えた場合にはスリップありと判定することで車両3のスリップ状態が検出される。後進意思取得手段は、シフトポジションがリバース位置にあるか否かにより運転者の後進意思を判定するものであり、蓄電状態取得手段は、バッテリ9に設けられた公知の蓄電状態又は残容量状態を検出する検出器である。蓄電装置温度取得手段は、バッテリ9に設けられたバッテリ温度を検出する検出器である。
【0082】
次に車両後進時の制御フローについて図12を参照して説明する。
先ず、シフトポジションがリバース(Rvs)位置にあるか否かを検出する(S11)。その結果、シフトポジションがリバース位置になければ処理を終了する。また、シフトポジションがリバース位置にあれば、ECU45は前輪駆動装置6による前輪駆動を禁止し(S12)、路面傾斜状態判定処理(S13)に進む。路面傾斜状態判定処理(S13)では、ECU45は、路面状態取得手段から取得した登坂角が所定値以下か否かを検出する(S13)。その結果、登坂角が所定値以下でない、即ち登坂角が所定値より大きい登坂であると判定された場合にはSOC判定処理に進む(S14)。一方、登坂角が所定値以下、即ち平地と判定された場合には路面摩擦状態取得処理に進む(S15)。
【0083】
路面摩擦状態取得処理(S15)では、路面状態取得手段から取得したμから滑りやすさを判定し、滑りやすいと判定された場合にはSOC判定処理に進む(S14)。一方、滑りにくいと判定された場合には内燃機関4が駆動中であれば停止(ENG停止)し、非駆動であれば停止(ENG停止)を維持し(S16)、後輪駆動装置1の電動機2A、2B(リヤモータ)のみの後輪後進状態で後進する(S17)。後輪後進状態で後進中には、スリップ状態判定処理(S18)が行なわれる。スリップ状態判定処理(S18)では、スリップ状態取得手段から取得したスリップ状態に基づいて、スリップが検出された場合にはSOC判定処理に進む(S14)。また、スリップ状態が検出されなければ後輪後進状態を維持する。
【0084】
SOC判定処理(S14)では、ECU45は、SOCが所定値以上か否かの判定を行い、SOCが所定値以上でない、即ちSOCが所定値より少ない場合には、前輪駆動装置6の内燃機関4と後輪駆動装置1の電動機2A、2Bとの前後輪後進状態(AWD後進)で後進する(S19)。一方、SOCが所定値以上である場合には、前輪駆動装置6の電動機5と後輪駆動装置1の電動機2A、2Bとの前後輪後進状態(AWD後進)で後進する(S20)。
【0085】
なお、図12に記載した制御フローは、必ずしもこれに限定されるものではなく、例えばS15の路面摩擦状態判定処理とS18のスリップ状態判定はいずれか一方を備えていればよい。さらに、S12、S15、S16、S18は省略することもできる。
【0086】
次に後輪後進状態(S17)における電力制御について図13を参照して説明する。
先ず、SOC判定処理(S21)では、ECU45は、SOCが所定値以上か否かの判定を行い、SOCが所定値以上である場合には、後輪駆動装置1の電動機2A、2Bはバッテリ9からの電力のみ、又は、バッテリ9からの電力と前輪駆動装置6の電動機5の発電電力を足し合わせた電力を消費して駆動される(S22)。
【0087】
一方、SOCが所定値以上でない、即ちSOCが所定値より少ない(低蓄電状態)場合には、前輪駆動装置6の電動機5の発電電力のみを消費して駆動される(S23)。なお、SOC判定処理(S21)での所定値は、SOC判定処理(S14)での所定値とは異なるものである。続いて、バッテリ9の温度検出処理がなされる(S24)。その結果、バッテリ温度が所定値以上であれば、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力よりも大きくなるように制御される(S25)。これにより、前輪駆動装置6の電動機5の発電電力から後輪駆動装置1の電動機2A、2Bによる消費電力を差し引いた電力がバッテリ9に蓄電される。
【0088】
一方、温度検出処理(S24)の結果、バッテリ温度が所定値より低い(低蓄電装置温度)場合、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力を超えないように制御される。これにより、低温時におけるバッテリ9の不具合を防止できる。なお、このとき、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力と後輪駆動装置1の電動機2A、2Bによる消費電力とが等しくなるように制御されることが好ましい。
【0089】
図14は、車両が停車中の状態からEV発進→EV加速→エンジン加速→減速回生→中速クルーズ→加速→高速クルーズ→減速回生→停車→後進→停車に至る際の電動オイルポンプ70(EOP)と、一方向クラッチ50(OWC)、油圧ブレーキ60A、60B(BRK)のタイミングチャートである。
【0090】
先ず、イグニッションをONにしてシフトがPレンジからDレンジに変更され、アクセルペダルが踏まれるまでは、一方向クラッチ50は非係合(OFF)、油圧ブレーキ60A、60Bは解放(OFF)状態を維持するように制御される。そこから、アクセルペダルが踏まれると後輪駆動(RWD)で後輪駆動装置1によるEV発進、EV加速がなされる。このとき、一方向クラッチ50が係合(ON)し、油圧ブレーキ60A、60Bは弱締結状態に制御される。そして、車速が低車速域から中車速域に至って後輪駆動から前輪駆動になると内燃機関4によるENG走行(FWD)がなされる。このとき、一方向クラッチ50が非係合(OFF)となり、油圧ブレーキ60A、60Bはそのままの状態が維持される。そして、ブレーキが踏まれるなど減速回生時には、一方向クラッチ50が非係合(OFF)のまま、油圧ブレーキ60A、60Bが締結(ON)状態に制御される。内燃機関4による中速クルーズ中は、上述のENG走行と同様の状態となる。続いて、さらにアクセルペダルが踏まれて前輪駆動から四輪駆動(AWD)になると、再び一方向クラッチ50が係合(ON)する。そして、車速が中車速域から高車速域に至ると、再び内燃機関4によるENG走行(FWD)がなされる。このとき、一方向クラッチ50が非係合(OFF)となり、油圧ブレーキ60A、60Bが解放(OFF)状態に制御される。そして、減速回生時には、上述した減速回生時と同様の状態となる。そして、車両が停止すると、一方向クラッチ50は非係合(OFF)、油圧ブレーキ60A、60Bは解放(OFF)状態に制御される。
【0091】
続いて、後進走行時には、後輪駆動(RWD)又は四輪駆動(AWD)とすることで一方向クラッチ50は非係合(OFF)のまま、油圧ブレーキ60A、60Bが締結(ON)状態に制御される。そして、車両が停止すると、再び一方向クラッチ50は非係合(OFF)となり、油圧ブレーキ60A、60Bは解放(OFF)状態に制御される。
【0092】
以上説明したように、本実施形態によれば、車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、その際、ECU45は、油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。言い換えると、ECU45は、車両後進時に前輪駆動装置6の駆動力のみによる後進駆動を禁止する。従って、前輪駆動装置6の後進禁止手段としての機能も有している。車両後進時に前輪駆動装置6の後進駆動力のみで後進すると一方向クラッチ50が係合状態となって、電動機2A、2Bのフリクションによる車両エネルギ効率の悪化や、後進走行性能(走破性)の悪化の虞があるが、少なくとも後輪駆動装置1の後進駆動力を発生させて後進することにより、車両エネルギ効率や後進走行性能の悪化を抑制できる。
【0093】
また、本実施形態によれば、ECU45は、車両後進時に、後輪駆動装置1のみに後進駆動力を発生させる後輪後進状態と、後輪駆動装置1及び前輪駆動装置6に後進駆動力を発生させる前後輪後進状態とを切り替えることにより、車両エネルギ効率や走行状況に応じた適切な後進を行うことができる。
【0094】
また、本実施形態によれば、ECU45は路面状態を推定または検出する路面状態取得手段からの路面状態に基づいて切り替えを行うことにより、さらに適切な後進が可能となる。路面状態は、路面の傾斜状態としてもよく、その際、後進方向の傾斜が所定値より大きいときに前後輪後進状態とすることにより、急な登坂であってもスリップの発生や、登坂できなくなることを防止、又は抑制できる。また、所定値以下のときには、後輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0095】
さらに、路面状態は、路面の摩擦状態としてもよく、その際、所定の摩擦状態よりも低い低摩擦状態のときに前後輪後進状態とすることにより、雪道等であってもスリップの発生を防止、又は抑制できる。また、高摩擦状態のときには、後輪後進状態とすることが可能となるので後進時の車両エネルギ効率を向上できる。
【0096】
また、本実施形態によれば、ECU45は車両運転者の後進意思を検出または推定する後進意思取得手段からの後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことにより、後進開始時のスリップを抑制できる。
【0097】
また、本実施形態によれば、ECU45は後輪後進状態での後進時に、後輪Wrのスリップを推定もしくは検出するスリップ状態取得手段からスリップ状態が取得されたときに前後輪後進状態に切り替えるので、後輪後進状態での後進走行中のスリップを早期に解消できる。
【0098】
また、本実施形態によれば、ECU45は電動機2A、2B及び電動機5へ電力を供給するバッテリ9のSOCを推定もしくは検出する蓄電状態取得手段からのSOCに基づいて前輪駆動装置6の内燃機関4と電動機5とを制御するので、車両エネルギ効率、走破性などを適切に制御することができる。特に、SOCが所定値より低いときに、ECU45は、内燃機関4のみから駆動力を発生させるように前輪駆動装置6を制御することにより、前輪駆動装置6の電動機5からは駆動力を発生させず、バッテリ9の電力を後輪駆動装置1の電動機2A、2Bのみに供給可能となるので、SOCが低い場合にも前後輪後進が可能となる。また、SOCが所定値以上のときに、少なくとも電動機5から駆動力を発生させるように前輪駆動装置6を制御することにより、内燃機関4の負荷を低減でき、車両エネルギ効率を向上できる。この際、電動機5から駆動力を発生させかつ内燃機関4を停止させるように前輪駆動装置6を制御してもよい。内燃機関4を停止させることで、さらに車両エネルギ効率を向上できる。
【0099】
また、本実施形態によれば、ECU45は後輪後進状態での後進時に、後輪駆動装置1の電動機2A、2Bを、前輪駆動装置6の電動機5の発電電力とバッテリ9の電力の少なくとも一方を選択的に消費して駆動するので、バッテリ9の状態や前輪駆動装置6の電動機5の状態に応じて後輪駆動装置1の電動機2A、2Bの駆動を適切に行うことができる。例えば、バッテリ温度が所定値より低いときに、ECU45は、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力を超えないように制御することにより、発電電力が消費電力に対し過剰とならないので、低温時にバッテリ9に電力が流入することを抑制することができる。このとき、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力と後輪駆動装置1の電動機2A、2Bによる消費電力とが等しくなるように制御することで、発電電力が消費電力に対し不足とならないので、後輪駆動装置1の電動機2A、2Bで所望の駆動力を出力することができる。
【0100】
また、例えばバッテリ9が低蓄電状態のときに、ECU45は前輪駆動装置6の電動機5による発電電力のみを後輪駆動装置1の電動機2A、2Bへ供給するよう制御することにより、バッテリ9から電力を持ち出すことなく、後輪駆動装置1の電動機2A、2Bを駆動することができる。さらに、前輪駆動装置6の電動機5から後輪駆動装置1の電動機2A、2Bへ供給する発電電力が後輪駆動装置1の電動機2A、2Bによる消費電力よりも大きくなるように制御することにより、後輪駆動装置1の電動機2A、2Bで所望の駆動力を出力しつつバッテリ9を充電することができる。
【0101】
尚、本発明は、上述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。
例えば、本実施形態の後輪駆動装置1は、2つの電動機2A、2Bにそれぞれ遊星歯車式減速機12A、12Bを設け、それぞれ左後輪LWrと右後輪RWrの制御するように構成したが、これに限定されず、図15に示すように1つの電動機2Cと1つの減速機12Cを不図示の差動装置に接続して構成してもよい。
【0102】
また、例えば、本実施形態の後輪駆動装置1は、電動機2A、2Bと後輪Wr(RWr、LWr)との伝達系路上に遊星歯車式減速機12A、12Bを備えたものを例示したが、必ずしも遊星歯車式減速機12A、12B等の変速機を備えている必要はない。
また、断接手段として油圧ブレーキ60A、60Bを例示したが、機械式等公知の断接手段を用いてもよい。
【0103】
また、車両3は、前輪駆動装置6を内燃機関4を用いずに電動機5を唯一の駆動源とする電気自動車でもよい。
また、ECU45は、後輪駆動装置1の電動機2A、2Bと油圧ブレーキ60A、60Bを制御する駆動装置1用のECUと、駆動装置6の内燃機関4と電動機5とを制御する駆動装置6用のECUと、駆動装置1と駆動装置6とを制御する前後進制御装置としてのECUとをそれぞれ備えていてもよい。さらに、駆動装置1用のECUは、電動機2A,2Bを制御する電動機ECUと、油圧ブレーキ60A、60Bを制御する断接手段ECUをそれぞれ備えていてもよい。
また、前輪駆動装置6の電動機5と後輪Wr側の後輪駆動装置1の電動機2A、2Bは、異なるバッテリに接続されていてもよい。
【符号の説明】
【0104】
1 後輪駆動装置(第1駆動装置)
2A、2B、2C 電動機
4 内燃機関
5 電動機(他の電動機)
6 前輪駆動装置(第2駆動装置)
9 バッテリ
45 ECU(電動機制御装置、断接手段制御装置、後進制御装置)
50 一方向クラッチ(一方向動力伝達手段)
60A、60B 油圧ブレーキ(断接手段)
LWr 左後輪(第1駆動輪)
RWr 右後輪(第1駆動輪)
Wr 後輪(第1駆動輪)
LWf 左前輪(第2駆動輪)
RWf 右前輪(第2駆動輪)
Wf 前輪(第2駆動輪)
【特許請求の範囲】
【請求項1】
前輪および後輪の一方である第1駆動輪を駆動する第1駆動装置と、該前輪および後輪の他方である第2駆動輪を駆動する第2駆動装置と、を備えた前後輪駆動車両であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機と、
前記電動機を制御する電動機制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段と、
前記断接手段を制御する断接手段制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段と、を備え、
車両後進時には、少なくとも前記第1駆動装置に後進駆動力を発生させて後進させ、
前記第1駆動装置に後進駆動力を発生させるときに、前記断接手段制御装置は前記断接手段を締結して電動機側と第1駆動輪側とを接続状態にし、前記電動機制御装置は前記電動機を逆方向の回転動力が発生するよう駆動することを特徴とする前後輪駆動車両。
【請求項2】
車両後進時に、前記第1駆動装置のみに後進駆動力を発生させる一方輪後進状態と、前記第1駆動装置及び前記第2駆動装置に後進駆動力を発生させる前後輪後進状態とを切り替える後進制御装置を備えることを特徴とする請求項1に記載の前後輪駆動車両。
【請求項3】
路面状態を推定または検出する路面状態取得手段をさらに備え、
前記後進制御装置は、路面状態に基づいて前記切り替えを行うことを特徴とする請求項2に記載の前後輪駆動車両。
【請求項4】
前記路面状態は路面の傾斜状態であって、前記路面の傾斜状態に基づいて前記切り替えを行うことを特徴とする請求項3に記載の前後輪駆動車両。
【請求項5】
前記後進制御装置は、後進方向の傾斜が所定値より大きいときに、前記前後輪後進状態とすることを特徴とする請求項4に記載の前後輪駆動車両。
【請求項6】
前記路面状態は路面の摩擦状態であって、前記路面の摩擦状態に基づいて前記切り替えを行うことを特徴とする請求項3に記載の前後輪駆動車両。
【請求項7】
前記後進制御装置は、所定の摩擦状態よりも低い低摩擦状態のときに、前記前後輪後進状態とすることを特徴とする請求項6に記載の前後輪駆動車両。
【請求項8】
車両運転者の後進意思を検出または推定する後進意思取得手段をさらに備え、
前記後進制御装置は、前記後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことを特徴とする請求項2〜7のいずれか1項に記載の前後輪駆動車両。
【請求項9】
前記一方輪後進状態での後進時に、前記第1駆動輪のスリップを推定もしくは検出するスリップ状態取得手段をさらに備え、
前記後進制御装置は、スリップ状態が取得されたときに前記前後輪後進状態に切り替えることを特徴とする請求項2〜8のいずれか1項に記載の前後輪駆動車両。
【請求項10】
前記第2駆動装置は、車両の駆動力を発生する内燃機関と他の電動機とを備え、
前記前後輪駆動車両は、前記電動機及び前記他の電動機へ電力を供給する蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記後進制御装置は、前記前後輪後進状態での後進時に、前記蓄電状態に基づいて前記第2駆動装置の前記内燃機関と前記他の電動機とを制御することを特徴とする請求項2〜9のいずれか1項に記載の前後輪駆動車両。
【請求項11】
前記蓄電状態が所定値より低いときに、前記後進制御装置は、前記内燃機関のみから駆動力を発生させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項12】
前記蓄電状態が所定値以上のときに、前記後進制御装置は、少なくとも前記他の電動機から駆動力を発生させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項13】
前記蓄電状態が所定値以上のときに、前記後進制御装置は、前記電動機から駆動力を発生させかつ前記内燃機関を停止させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項14】
前記第2駆動装置は、車両の駆動力を発生する内燃機関と他の電動機とを備え、
前記前後輪駆動車両は、前記他の電動機による発電電力を蓄電する蓄電装置と、前記電動機への電力供給を制御する電力供給制御装置と、をさらに備え、
前記電動機は、前記他の電動機の発電電力と前記蓄電装置の電力の少なくとも一方を消費して駆動されることを特徴とする請求項1〜9のいずれか1項に記載の前後輪駆動車両。
【請求項15】
前記前後輪駆動車両は、前記蓄電装置の温度を推定もしくは検出する蓄電装置温度取得手段をさらに備え、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力を超えないように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項16】
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力と前記電動機による消費電力とが等しくなるように制御することを特徴とする請求項15に記載の前後輪駆動車両。
【請求項17】
前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力よりも大きくなるように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項18】
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が電動機による消費電力よりも大きくなるように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項19】
前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項20】
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする請求項19に記載の前後輪駆動車両。
【請求項21】
前輪および後輪の一方である第1駆動輪を駆動する第1駆動装置と、該前輪および後輪の他方である第2駆動輪を駆動する第2駆動装置と、を備えた前後輪駆動車両であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機と、
前記電動機を制御する電動機制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段と、
前記断接手段を制御する断接手段制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段と、を備え、
車両後進時に、前記第2駆動装置の駆動力のみによる後進駆動を禁止する後進禁止手段を備えることを特徴とする前後輪駆動車両。
【請求項1】
前輪および後輪の一方である第1駆動輪を駆動する第1駆動装置と、該前輪および後輪の他方である第2駆動輪を駆動する第2駆動装置と、を備えた前後輪駆動車両であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機と、
前記電動機を制御する電動機制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段と、
前記断接手段を制御する断接手段制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段と、を備え、
車両後進時には、少なくとも前記第1駆動装置に後進駆動力を発生させて後進させ、
前記第1駆動装置に後進駆動力を発生させるときに、前記断接手段制御装置は前記断接手段を締結して電動機側と第1駆動輪側とを接続状態にし、前記電動機制御装置は前記電動機を逆方向の回転動力が発生するよう駆動することを特徴とする前後輪駆動車両。
【請求項2】
車両後進時に、前記第1駆動装置のみに後進駆動力を発生させる一方輪後進状態と、前記第1駆動装置及び前記第2駆動装置に後進駆動力を発生させる前後輪後進状態とを切り替える後進制御装置を備えることを特徴とする請求項1に記載の前後輪駆動車両。
【請求項3】
路面状態を推定または検出する路面状態取得手段をさらに備え、
前記後進制御装置は、路面状態に基づいて前記切り替えを行うことを特徴とする請求項2に記載の前後輪駆動車両。
【請求項4】
前記路面状態は路面の傾斜状態であって、前記路面の傾斜状態に基づいて前記切り替えを行うことを特徴とする請求項3に記載の前後輪駆動車両。
【請求項5】
前記後進制御装置は、後進方向の傾斜が所定値より大きいときに、前記前後輪後進状態とすることを特徴とする請求項4に記載の前後輪駆動車両。
【請求項6】
前記路面状態は路面の摩擦状態であって、前記路面の摩擦状態に基づいて前記切り替えを行うことを特徴とする請求項3に記載の前後輪駆動車両。
【請求項7】
前記後進制御装置は、所定の摩擦状態よりも低い低摩擦状態のときに、前記前後輪後進状態とすることを特徴とする請求項6に記載の前後輪駆動車両。
【請求項8】
車両運転者の後進意思を検出または推定する後進意思取得手段をさらに備え、
前記後進制御装置は、前記後進意思を取得した後でかつ車両後進開始前に切り替え判定を行うことを特徴とする請求項2〜7のいずれか1項に記載の前後輪駆動車両。
【請求項9】
前記一方輪後進状態での後進時に、前記第1駆動輪のスリップを推定もしくは検出するスリップ状態取得手段をさらに備え、
前記後進制御装置は、スリップ状態が取得されたときに前記前後輪後進状態に切り替えることを特徴とする請求項2〜8のいずれか1項に記載の前後輪駆動車両。
【請求項10】
前記第2駆動装置は、車両の駆動力を発生する内燃機関と他の電動機とを備え、
前記前後輪駆動車両は、前記電動機及び前記他の電動機へ電力を供給する蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記後進制御装置は、前記前後輪後進状態での後進時に、前記蓄電状態に基づいて前記第2駆動装置の前記内燃機関と前記他の電動機とを制御することを特徴とする請求項2〜9のいずれか1項に記載の前後輪駆動車両。
【請求項11】
前記蓄電状態が所定値より低いときに、前記後進制御装置は、前記内燃機関のみから駆動力を発生させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項12】
前記蓄電状態が所定値以上のときに、前記後進制御装置は、少なくとも前記他の電動機から駆動力を発生させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項13】
前記蓄電状態が所定値以上のときに、前記後進制御装置は、前記電動機から駆動力を発生させかつ前記内燃機関を停止させるように前記第2駆動装置を制御することを特徴とする請求項10に記載の前後輪駆動車両。
【請求項14】
前記第2駆動装置は、車両の駆動力を発生する内燃機関と他の電動機とを備え、
前記前後輪駆動車両は、前記他の電動機による発電電力を蓄電する蓄電装置と、前記電動機への電力供給を制御する電力供給制御装置と、をさらに備え、
前記電動機は、前記他の電動機の発電電力と前記蓄電装置の電力の少なくとも一方を消費して駆動されることを特徴とする請求項1〜9のいずれか1項に記載の前後輪駆動車両。
【請求項15】
前記前後輪駆動車両は、前記蓄電装置の温度を推定もしくは検出する蓄電装置温度取得手段をさらに備え、
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力を超えないように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項16】
前記蓄電装置温度が所定値より低い低蓄電装置温度のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力と前記電動機による消費電力とが等しくなるように制御することを特徴とする請求項15に記載の前後輪駆動車両。
【請求項17】
前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が前記電動機による消費電力よりも大きくなるように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項18】
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置および前記電動機制御装置は、前記他の電動機から前記電動機へ供給する発電電力が電動機による消費電力よりも大きくなるように制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項19】
前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする請求項14に記載の前後輪駆動車両。
【請求項20】
前記前後輪駆動車両は、前記蓄電装置の蓄電状態を推定もしくは検出する蓄電状態取得手段をさらに備え、
前記蓄電状態が所定値より低い低蓄電状態のときに、前記電力供給制御装置は前記他の電動機による発電電力のみを前記電動機へ供給するよう制御することを特徴とする請求項19に記載の前後輪駆動車両。
【請求項21】
前輪および後輪の一方である第1駆動輪を駆動する第1駆動装置と、該前輪および後輪の他方である第2駆動輪を駆動する第2駆動装置と、を備えた前後輪駆動車両であって、
前記第1駆動装置は、
車両の駆動力を発生する電動機と、
前記電動機を制御する電動機制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と第1駆動輪側とを遮断状態又は接続状態にする断接手段と、
前記断接手段を制御する断接手段制御装置と、
前記電動機と前記第1駆動輪との動力伝達経路上に前記断接手段と並列に設けられ、電動機側の順方向の回転動力が第1駆動輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が第1駆動輪側に入力されるときに非係合状態となり、第1駆動輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに第1駆動輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向動力伝達手段と、を備え、
車両後進時に、前記第2駆動装置の駆動力のみによる後進駆動を禁止する後進禁止手段を備えることを特徴とする前後輪駆動車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−91766(P2012−91766A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−290697(P2010−290697)
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]