
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
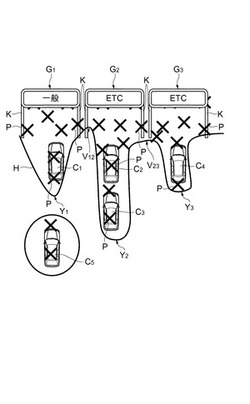
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両前方の物標の情報を検出し、自車両の前方環境を認識する前方環境認識装置、およびそれを備えた車両誘導システムに関する。
【背景技術】
【0002】
このような分野の技術として、自車両の進行方向前方に料金所が存在するか否かを判定することが可能な前方環境認識装置が知られている。特許文献1に記載の前方環境認識装置は、レーザ光を反射した複数の反射点を検出し、検出された複数の反射点のうち互いに近接した反射点が同一物体上の点であると予測することで、前方物体を検出している。この前方環境認識装置では、検出された前方物体に含まれる反射点の数を測定し、当該反射点の数量が基準値より大きい場合には、当該前方物体を料金所であると判定している。
【0003】
また、特許文献2に記載のナビゲーション装置は、推奨経路を案内する上で最も好ましい、料金所におけるゲート位置を選択し、選択したゲート位置まで自車両を誘導している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−69328号公報
【特許文献2】特開2009−31205号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の技術では、料金所の手前に車両が並んでいるような場合には、車両が邪魔になってしまうため、料金所を検出することができないという問題があった。
【0006】
本発明は、このような課題を解決するために成されたものであり、ゲートの手前に車両が並んでいる場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明による前方環境認識装置は、自車両前方の物標の情報を検出し、検出された物標の情報に基づいて、前方環境を認識する前方環境認識装置において、検出された物標の情報に基づいて、物標の平面分布形状を算出する平面分布形状算出手段と、平面分布形状算出手段によって算出された平面分布形状に基づいて、ゲートの有無を判定するゲート判定手段と、を備え、ゲート判定手段は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在し当該障害物の前方にゲートが存在すると認識することを特徴としている。
【0008】
このような前方環境認識装置では、検出された物標の情報に基づいて、物標の平面分布形状を算出する。前方環境認識装置は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在するゲートが有ると認識することが可能である。これにより、ゲートの手前に他車両などの障害物が存在する場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することができる。
【0009】
また、ゲート判定手段は、隣接する山型分布形状の間に形成された谷型形状を判別し、判別された谷型形状に対応する位置に、ゲート構造物が存在していると認識することが好ましい。これにより、ゲート間に存在するゲート構造物を認識することができる。ゲート構造物としては、「ETC」、「一般」などの表示する表示板を支持するポール、料金収集作業を行う作業員が存在する建屋などが挙げられる。
【0010】
また、ゲート判定手段は、山型分布形状から車線数量分横方向に離れた位置で、自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に障害物が存在しない他のゲートが存在すると認識することが好適である。
【0011】
また、ゲート判定手段は、山型分布形状における単位時間当たりの形状の変化率に基づいて、ゲートの種別を判定するゲート種別判定手段を有し、ゲート種別判定手段は、変化率が判定基準値より大きい場合には、ETCゲートが存在すると判定し、変化率が判定基準値より小さい場合には、一般ゲートが存在すると判定する構成としてもよい。
【0012】
また、本発明による車両誘導システムは、前方環境認識装置を備え、ゲート判定手段によって認識されたゲートを通過するように自車両を誘導することを特徴としている。
【0013】
このような前方環境認識装置では、検出された物標の情報に基づいて、物標の平面分布形状を算出する。前方環境認識装置は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在するゲートが有ると認識することが可能である。これにより、ゲートの手前に他車両などの障害物が存在する場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することができる。また、認識されたゲートを通過するように自車両を誘導することができる。
【0014】
さらに、複数のゲートのうち、自車両の車線変更量が最小となるゲートを選択し、選択されたゲートを通過するように自車両を誘導する構成としてもよい。
【発明の効果】
【0015】
本発明の前方環境認識装置、およびそれを備えた車両誘導システムによれば、ゲートの手前に車両が並んでいる場合であっても、自車両前方の物標の情報を検出してゲートを認識することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態に係る前方環境認識装置のブロック構成図である。
【図2】料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。
【図3】ECUで実行されるゲート位置認識処理の手順を示すフローチャートである。
【図4】ECUで実行されるゲート種別判定処理の手順を示すフローチャートである。
【図5】本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムである。
【図6】ECUで実行される目標通過ゲート選択処理の手順を示すフローチャートである。
【図7】料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同様の要素には同一の符号を付し、重複する説明を省略する場合がある。
【0018】
[第1実施形態]
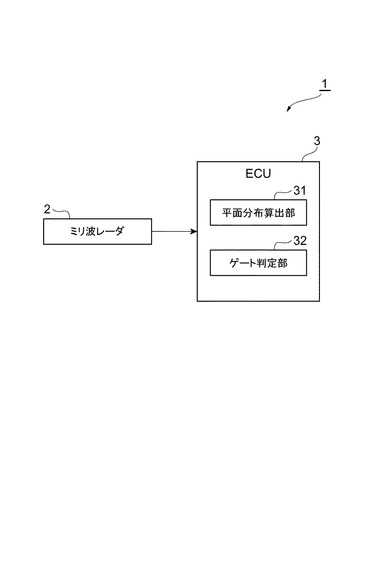
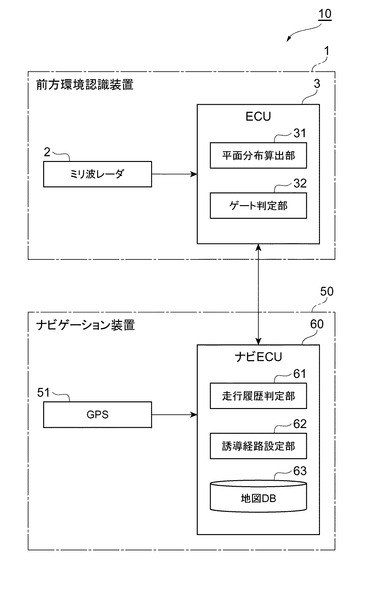
図1は、本発明の第1実施形態に係る前方環境認識装置のブロック構成図である。前方環境認識装置1は、車両に搭載され、自車両の前方環境を認識するものである。前方環境認識装置1は、自車両前方の物標の情報を検出するミリ波レーダ2、およびミリ波レーダと電気的に接続された電子制御ユニット(以下、「ECU」という。)3を備えている。
【0019】
ミリ波レーダ2は、ミリ波を利用して前方の物体を検出するレーダである。ミリ波レーダ2は、自動車の前面側の中央に取り付けられている。ミリ波レーダ2では、ミリ波を自車両から前方に向けて出射し、物体で反射したミリ波を受信する。ミリ波レーダ2は、反射したミリ波を検出することで、自車両前方の物標の情報を検出する。ミリ波レーダ2は、検出された物標の情報をECU3に出力する。物標の情報には、ミリ波が反射した点(センサ認識物標点P、図2参照)の位置情報が含まれている。
【0020】
ECU3は、演算処理を行うCPU、記憶部となるROMおよびRAM、入力信号回路、出力通信回路、電源回路などにより構成されている。ECU3は、検出された物標の情報に基づいて、物標の平面分布形状H(図2参照)を算出する平面分布算出部31、およびゲート判定部32によって算出された平面分布形状Hに基づいて、ゲートG1〜G3の有無を判定するゲート判定部32を有する。なお、ゲートG1〜G3を区別する必要がないときは、ゲートGと記す。同様に、車両C1〜C4を区別する必要がないときは、車両Cと記し、山型分布形状Y1〜Y3を区別する必要がないときは、山型分布形状Yと記す。
【0021】
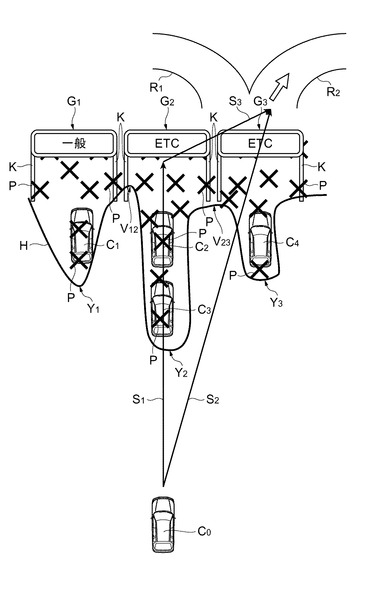
平面分布算出部31は、ミリ波レーダ2を介してセンサ認識物標点Pの位置情報を取得して、平面分布形状Hを作成する。図2に示すように、例えば、高速道路などの料金所のゲートGに車両Cが並んでいる場合には、これらの車両Cで反射したセンサ認識物標点Pが認識され、山型分布形状Yを含む平面分布形状Hが形成される。また、ゲートGに他車両Cが存在しない場合には、車両Cから反射するセンサ認識物標点Pが検出されないため、山型分布形状Yが形成されず、谷底形状が形成される。
【0022】
平面分布算出部31は、例えば、センサ認識物標点Pの分布状態を示す平面図を作成し、自車両側に分布するセンサ認識物標点Pを囲むように曲線を作成して平面分布形状Hを作成する。また、料金所手前に形成される山型分布形状Yは、車両の存在を示すものであるため、平面分布算出部31は、平面分布形状Hの作成に際し、ゲートGと車両Cの横幅(約3m)との位置関係を反映させる。また、料金所の通過待ちの車列の長さを判定することが主な目的であるため、平面分布形状Hの作成に際し、移動体(ゲートを通過する車両等)を反映させないようにする。
【0023】
また、料金所では、隣接する走行レーン間にゲート構造物Kが存在し車両が走行できない場所がある。これにより、隣接する走行レーン間では、車両Cからのセンサ認識物標点Pが検出されないため、山型分布形状Yに挟まれた谷型形状V12,V23が形成される。走行レーン間に存在するゲート構造物Kとは、例えば、「ETC」、「一般」などの表示板を支持するためのポールなどである。また、ゲート構造物Kとしては、料金収集作業を行う作業者が存在する建屋などがある。
【0024】
ゲート判定部32は、平面分布算出部31によって算出された平面分布形状Hから山型分布形状Yを判別する。ゲート判定部32は、平面分布形状Hを分析し、自車両側へ突出する形状を山型分布形状Yとして認識する。ゲート判定部32は、山型分布形状Yに対応する位置に障害物が存在し、この障害物の前方にゲートGが有ると認識する。
【0025】
また、ゲート判定部32は、平面分布形状Hを分析し谷型形状V12,V23を認識する。ゲート判定部32は、山型分布形状Yに対応する位置に、ゲート構造物Kが有ると認識する。
【0026】
また、ゲート判定部32は、山型分布形状Yから車線数量分、横方向に離れた位置で、車線方向において自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に他車両(障害物)が存在しないゲートが存在すると認識する。ゲート判定部32は、例えば、ナビ情報に基づいて、料金所における車線数量、車線幅に関する情報を取得することができる。
【0027】
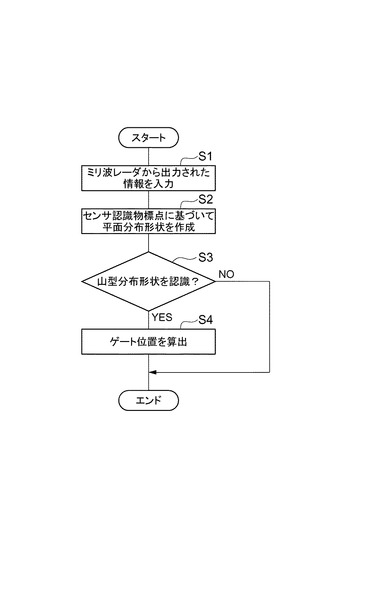
次に、図3のフローチャートを参照して、前方環境認識装置1における動作について説明する。図3は、ECUで実行されるゲート位置認識処理の手順を示すフローチャートである。まず、ECU3は、ミリ波レーダ2から出力されたセンサ認識物標点Pの位置情報を入力する(ステップS1)。次に、ECU3は、センサ認識物標点Pの位置情報に基づいて、平面分布形状Hを作成する。
【0028】
続いて、ECU3は、平面分布形状Hから山型分布形状Yを判別したか否かを判定する。山型分布形状Yを判別した場合には、ステップS4に進み、山型分布形状Yを認識しない場合には、ここでの処理を終了する。
【0029】
ステップS4では、ECU3は、山型分布形状Yに対応する位置に、車両Cが存在し、これらの車両Cの前方にゲートGが有ると認識し、処理を終了する。
【0030】
このような前方環境認識装置1によれば、検出されたセンサ認識物標点Pに基づいて、物標の平面分布形状Hを算出し、この平面分布形状Hから、自車両側(走行レーンの後方側)へ突出する山型分布形状Yを判別することができる。また、前方環境認識装置1は、判別された山型分布形状Yに対応する位置に他車両Cが存在するゲートGが有ると認識することが可能であるため、ゲートGの手前に他車両Cなどの障害物が存在する場合であっても、自車両前方の物標の情報(センサ認識物標点P)を検出して、ゲートGを認識することができる。
【0031】
また、前方環境認識装置1によれば、前方認識カメラを用いずにミリ波レーダ2のみで、車両等のノイズを分離して、料金所の正確な位置を認識することができる。また、車両Cなどの障害物に着目してゲートGの位置を認識することができる。
【0032】
[第2実施形態]
次に、本発明の第2実施形態に係る前方環境認識装置1について説明する。第2実施形態に係る前方環境認識装置1の装置構成は、第1実施形態の前方環境認識装置1と同じである。第2実施形態の前方環境認識装置1のゲート判定部32では、料金所のETCゲートG2,G3と一般ゲートG1とを判別する機能を備えている。ゲート判定部32は、山型分布形状Yの単位時間当たりの形状の変化率に基づいて、ゲートGの種別を判定する本発明のゲート種別判定手段に相当する。
【0033】
ゲート判定部32は、平面分布算出部31によって算出された平面分布形状Hの変化率を算出し、ゲートGの種別を判定する。一般的に、ETCゲートG2,G3を通過する車両C2〜C4は、ETCゲートG2,G3ではない一般ゲートG1を通過する車両C1と比較して高速で移動する。そのため、ETCゲートG2,G3の手前に形成される山型分布形状Y2,Y3の形状の変化率Q2,Q3は、一般ゲートG1の手前に形成される山型分布形状Y1の形状の変化率Q1よりも大きくなる。
【0034】
ゲート判定部32は、山型分布形状Yの変化率Qが判定基準値Qthより大きい場合には、当該山型分布形状Y2,Y3に相当するゲートG2,G3は、ETCゲートであると判定し、山型分布形状Y1の変化率Q1が判定基準値Qthよりも小さい場合には、当該山型分布形状Y1に相当するゲートG1は、一般ゲートであると判定する。
【0035】
例えば、ETCゲートG2,G3を通過する車両C2〜C4は、15km/h以上で走行し、一般ゲートG1を通過する車両C1は、15km/h未満で走行する。また、山型分布形状Yからある閾値以上離れて存在する高速移動物体は、ゲート種別を判定するための対象から除外する。例えば、山型分布形状Y1から所定距離離れて位置で走行する車両C5は、対象から除外される。
【0036】
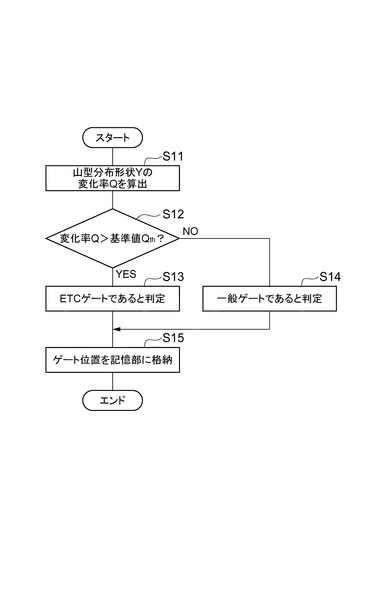
次に、図4のフローチャートを参照して、前方環境認識装置1における動作について説明する。図4は、ECUで実行されるゲート種別判定処理の手順を示すフローチャートである。ゲート種別判定処理は、ゲート位置認識処理が実行されて山型分布形状Yが判別された後に行われる。ゲート種別判定処理では、山型分布形状Yの形状の変化率Qを算出する(ステップS11)。例えば、山型分布形状Yの頂点の位置の単位時間当たりの進行方向の最大移動量を変化率として算出する。
【0037】
次に、ECU3は、算出された変化率Qが判定基準値Qthよりも大きいか否かを判定する(ステップS12)。変化率Qが判定基準値Qthよりも大きい場合には、ステップS13に進み、変化率Qが判定基準値Qthよりも小さい場合には、ステップS14に進む。
【0038】
ステップS13では、山型分布形状Yに相当するゲートは、ETCゲートであると判別し、ステップS14では、山型分布形状Yに相当するゲートは、一般ゲートであると判定する。続く、ステップS15では、ECU3は、判別されたゲート位置、およびゲート種別を記憶部に格納する。
【0039】
このように構成された前方環境認識装置1によれば、カメラ等を用いずに、ミリ波レーダ2によって取得された情報に基づいて、ゲート位置、およびゲート種別を認識することができる。前方環境認識装置1によって、ETCゲートと一般ゲートと識別することができるので、ETC搭載車であるか否かに応じて、適切なゲートを選択し誘導することができる。
【0040】
[第3実施形態]
次に、本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムについて説明する。図5は、本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムである。図5に示す車両誘導システム10は、前方環境認識装置1、およびナビゲーション装置50を備えている。前方環境認識装置1は、上記の実施形態の前方環境認識装置1と同じである。
【0041】
ナビゲーション装置50は、自車両の現在位置を取得して、目的地までの経路案内を行うものであり、自車両の現在位置を検出するGPS51、およびこのナビゲーション装置全体の制御を司るナビゲーションECU(以下、「ナビECU」という。)60を有する。ナビECU60は、前方環境認識装置1のECU3と相互にデータ交換可能な構成とされている。
【0042】
GPS(Global Positioning System)51は、GPS衛星からの信号を受信して、自車両の現在位置を検出する。検出された自車両の現在位置に関する情報は、ナビECU60に送信される。
【0043】
ナビECU60は、演算処理を行うCPU、記憶部となるROM及びRAM、入力信号回路、出力信号回路、電源回路などにより構成されている。ナビECU60は、走行履歴判定部61、誘導経路設定部62、および地図DB63を有する。
【0044】
走行履歴判定部61は、自車両の走行履歴を認識し、認識した走行履歴に関する情報(以下、「走行履歴情報」という。)を記憶部に格納する。走行履歴判定部61は、記憶部に格納された情報を参照して、自車両の走行履歴を判定する。
【0045】
走行履歴判定部61は、例えば、高速道路などの自動車専用道路を走行した場合に、自車両の走行履歴として認識し、認識した走行履歴情報を記憶部に格納する。例えば、高速道路へ進入するための入口ゲートを通過した場合には、自動車専用道路を走行したとの走行履歴情報を記憶する。
【0046】
また、走行履歴判定部61は、自動車専用道路の本線から退出路へ移動した場合に、自車両の走行履歴として認識し、認識した走行履歴情報を記憶部に格納する。例えば、車速が基準速度より低下し、所定の操舵が行われた場合には、退出路へ移動したとの走行履歴情報を記憶する。なお、退出路を走行するための運転支援制御が実行された場合に、退出路へ移動したとの走行履歴情報を記憶してもよい。
【0047】
誘導経路設定部62は、設定された目的地までの誘導経路を探索し、経路誘導を行うものである。本実施形態の誘導経路設定部62では、前方環境認識装置1からゲート位置、ゲート種別に関する情報を取得して、所定のゲートを通過するように誘導経路を設定することができる。
【0048】
地図DB63は、地図情報を記憶するデータベースである。また、地図DB63は、自車両の走行履歴情報、ゲート位置に関する情報、およびゲート種別に関する情報など、各種必要な情報を記憶する。
【0049】
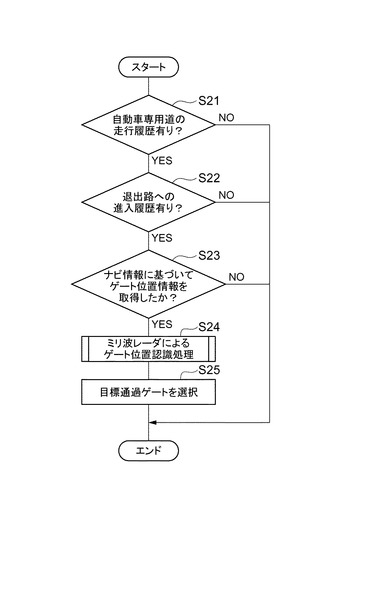
次に、図6のフローチャートを参照して、車両誘導システム10における動作について説明する。図6は、ECUで実行される目標通過ゲート選択処理の手順を示すフローチャートである。前方環境認識装置1のECU3は、ナビゲーション装置50から出力された情報を取得する。ECU3は、自動車専用道の走行履歴が有るか否かを判定する(ステップS21)。自車両が自動車専用道を走行したという走行履歴が有る場合には、ステップS22に進み、自動車専用道を走行したという走行履歴がない場合には、ここでの処理を終了する。
【0050】
ステップS22では、ECU3は、退出路への進入履歴が有るか否かを判定する。自車両が自動車専用道の本線から退出路へ移動した場合には、退出路への進入履歴があると判定し、ステップS23へ進む。自車両が本線を走行中である場合には、退出路への進入履歴がないと判定し、ここでの処理を終了する。
【0051】
ステップS23では、ECU3は、ナビゲーション装置50の地図DB63(ナビ情報)から料金所のゲート位置情報を取得したか否かを判定する。例えば、ナビ情報を参照し、自車両の現在地から距離が200m未満の範囲内に料金所のゲートGが存在すると認識した場合には、ゲート位置情報を取得したと判定し、ステップS24に進み、一方、ゲート位置情報を取得したと判定しない場合には、ここでの処理を終了する。
【0052】
ステップS24では、ECU3は、ミリ波レーダ2を用いたゲート位置認識処理を実行する。ECU3は、図3に示す処理(ステップS1〜S4)を実行し、センサ認識物標点Pに基づいて平面分布形状Hを作成し、平面分布形状Hから山型分布形状Yを認識する。ECU3は、山型分布形状Yに対応する位置に、ゲートGが存在すると認識し、ゲート位置を算出する。
【0053】
続くステップS25では、ECU3は、ステップS24で認識された複数のゲートから目標通過ゲートを選択する。ナビゲーション装置50では、前方環境認識装置1によって選択された目標通過ゲートの位置情報を取得して、当該ゲートを通過するように経路案内を行う。
【0054】
このような車両誘導システム10によれば、ナビゲーション装置50からの走行履歴情報に基づいて、料金所が有るか否かを予測したのちに、ミリ波レーダ2を用いたゲート位置認識処理を実行しているため、料金所を誤認識する可能性を低減することができる。ナビ情報を用いて料金所の存在を予め推測することで、例えば、橋、トンネル、看板など、走行車線を横切る物体を料金所として誤認識するおそれが低減される。
【0055】
[第4実施形態]
次に、本発明の第4実施形態に係る車両誘導システムについて説明する。第4実施形態に係る車両誘導システム10の装置構成は、第3実施形態の車両誘導システム10と同じである。第4実施形態のゲート判定部32では、認識された複数のゲートGから目標通過ゲートを選択する際の優先順位として、ゲートにおける混雑度よりも、車線変更移動量を重視している。すなわち、ゲート判定部32は、車線変更の移動量が少なくなるゲートを優先的に選択する機能を有する。
【0056】
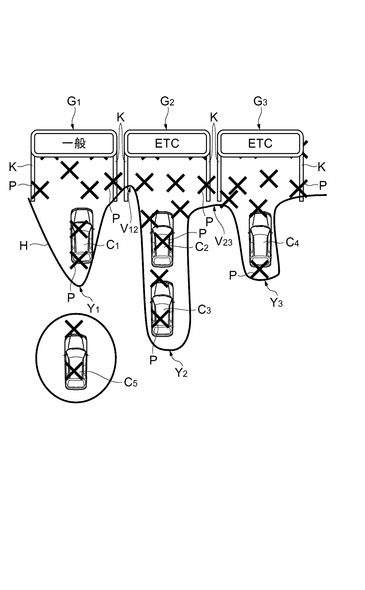
図7は、料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。ここでは、ETC搭載車両である自車両C0が、複数のゲート候補Gから通過目標ゲートを選択する場合について説明する。前方環境認識装置1は、図3に示す処理を行い、複数のゲートGの位置を算出する。さらに前方環境認識装置1は、図4に示す処理を行い、ゲート種別を識別する。
【0057】
次に、前方環境認識装置1のゲート判定部32では、自車両C0の現在位置からゲート候補G2,G3までの横方向(路幅方向)の移動量を演算し、横方向の移動量が最も少なくなるゲートを目標通過ゲートとして設定する。
【0058】
例えば、図7に示す状態では、自車両C0は、ゲートG3を通過するより、ゲートG2を通過した方が、横方向の移動量が少なくなる。このような状態では、ゲート判定部32は、横方向の移動量が少なくなるゲートG2を目標通過ゲートとして設定する。
【0059】
また、ゲート判定部32は、横方向の移動量が等しい場合には、ゲートGの混雑度を考慮して、混雑度の低いゲートGを目標通過ゲートとして設定する。そして、ナビゲーション装置50は、ゲート判定部32で設定された目標通過ゲートを通過するように経路案内を実施する。
【0060】
なお、ゲートGの混雑度を判定する場合には、山型分布形状Yにおける山の高さ(車線方向の長さ)に基づいて判定することができる。山の高さが低い方が、山の高さが高い方よりもゲートの混雑度が低いと判定する。山型分布形状Yにおける山の高さとは、車線方向の長さである。また、自車両から山型分布形状Yのピーク(凸形状)の位置までの長さに基づいて、ゲートGの混雑度を判定してもよい。例えば、自車両からピークまでの車線方向の長さが短いほど、ゲートの混雑度が高いと判定する。
【0061】
このような第4実施形態に係る車両誘導システム10では、横方向の移動量が少なくなるゲートを通過するように、経路案内することが可能である。これにより、ゲート手前での車線変更の回数を減らすことができ、自車両が他車両と接触するおそれを低減することができる。また、横方向の移動量が等しい場合には、ゲートの混雑度を考慮して、目標通過ゲートGを設定することで、ゲートを通過するまでの経過時間が短くなるように、車両誘導を行うことができる。
【0062】
[第5実施形態]
次に、本発明の第5実施形態に係る車両誘導システムについて説明する。第5実施形態に係る車両誘導システム10の装置構成は、第4実施形態の車両誘導システムと同じである。第5実施形態に係るゲート判定部32では、認識された複数のゲートGから目標通過ゲートを選択する際の優先順位として、ゲートにおける混雑度よりも、車線変更移動量を重視している。例えば、本実施形態のゲート判定部32では、料金所を通過した後の進路を考慮して、目標通過ゲートを設定することが可能である。
【0063】
ここでは、図7を参照して、料金所を通過した後の誘導経路が道路R2を通る経路である場合について説明する。図7に示すように、料金所を通過した後には、左側へ湾曲する道路R1と、右側へ湾曲する道路R2とが分岐する分岐路が形成されている。
【0064】
ゲート判定部32は、ナビゲーション装置50からナビ情報を取得して、ゲートGを通過した後の進行方向を認識する。ゲート判定部32は、自車位置C0とゲート通過後の分岐点における進路R2の車線中心とを、地図データ上で結び(例えば、直線S2)、その直線S2上のゲートG3を優先的に目標通過ゲートとして設定する。または、横方向において、直線S2と自車両C0との間で、直線S2に近い側のゲートから順に混雑度の低いゲートを目標通過ゲートとして選択してもよい。
【0065】
このように、本実施形態の車両誘導システム10では、ナビゲーション装置50から経路案内情報を取得し、ゲート通過後の進行方向を考慮してゲートを選択することができるため、ゲート通過後の横方向の移動量が最小とすることができる。これにより、車線を横切るような進路変更を防止するとともに、燃費が最適となるような案内経路を選択することが可能となる。例えば、ゲートG2を通過した後に、道路R2へ進行する場合には、直線S1に沿って直進し、ゲートG2を通過した後に、直線S3に沿って、車線変更をする必要がある。しかしながら、車両誘導システム10では、ゲート通過後の進路を考慮して、道路R2に近いゲートG2が選択されるため、ゲート通過後の横方向の移動量を減らすことができるため、他車両との接触のおそれを低減することができる。
【0066】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。また、上記実施形態では、谷型形状V12,V23を判別し、判別された谷型形状に対応する位置にゲート構造物が存在していると認識する構成としているが、谷型形状を判別、識別しない構成でもよい。要は、センサ認識物標点Pに基づいて、平面分布形状Hを作成し、平面分布形状Hから山型分布形状Yを判別してゲートGの有無を判別可能であればよい。
【0067】
また、上記実施形態の前方環境認識装置1では、前方認識を行うためのカメラを備えていない構成としているが、前方認識用のレーダの他にカメラを備える構成としてもよい。また、ミリ波レーダ2に代えて、その他の検出手段によって、センサ認識物標点Pを検出し、検出されたセンサ認識物標点Pに基づいて、平面分布形状Hを算出してもよい。
【符号の説明】
【0068】
1…前方環境認識装置、2…ミリ波レーダ、3…ECU、31…平面分布算出部(平面分布形状算出手段)、32…ゲート判定部(ゲート判定手段)、10…車両誘導システム、50…ナビゲーション装置、51…GPS、60…ナビECU、61…走行履歴判定部、62…誘導経路設定部、63…地図DB、C0…自車両、C、C1〜C4…車両、G,G1〜G3…ゲート、H…平面分布形状、K…ゲート構造物、P…センサ認識物標点、R…道路、Y,Y1〜Y3…山型分布形状、V12,V23…谷型形状。
【技術分野】
【0001】
本発明は、自車両前方の物標の情報を検出し、自車両の前方環境を認識する前方環境認識装置、およびそれを備えた車両誘導システムに関する。
【背景技術】
【0002】
このような分野の技術として、自車両の進行方向前方に料金所が存在するか否かを判定することが可能な前方環境認識装置が知られている。特許文献1に記載の前方環境認識装置は、レーザ光を反射した複数の反射点を検出し、検出された複数の反射点のうち互いに近接した反射点が同一物体上の点であると予測することで、前方物体を検出している。この前方環境認識装置では、検出された前方物体に含まれる反射点の数を測定し、当該反射点の数量が基準値より大きい場合には、当該前方物体を料金所であると判定している。
【0003】
また、特許文献2に記載のナビゲーション装置は、推奨経路を案内する上で最も好ましい、料金所におけるゲート位置を選択し、選択したゲート位置まで自車両を誘導している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−69328号公報
【特許文献2】特開2009−31205号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の技術では、料金所の手前に車両が並んでいるような場合には、車両が邪魔になってしまうため、料金所を検出することができないという問題があった。
【0006】
本発明は、このような課題を解決するために成されたものであり、ゲートの手前に車両が並んでいる場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明による前方環境認識装置は、自車両前方の物標の情報を検出し、検出された物標の情報に基づいて、前方環境を認識する前方環境認識装置において、検出された物標の情報に基づいて、物標の平面分布形状を算出する平面分布形状算出手段と、平面分布形状算出手段によって算出された平面分布形状に基づいて、ゲートの有無を判定するゲート判定手段と、を備え、ゲート判定手段は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在し当該障害物の前方にゲートが存在すると認識することを特徴としている。
【0008】
このような前方環境認識装置では、検出された物標の情報に基づいて、物標の平面分布形状を算出する。前方環境認識装置は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在するゲートが有ると認識することが可能である。これにより、ゲートの手前に他車両などの障害物が存在する場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することができる。
【0009】
また、ゲート判定手段は、隣接する山型分布形状の間に形成された谷型形状を判別し、判別された谷型形状に対応する位置に、ゲート構造物が存在していると認識することが好ましい。これにより、ゲート間に存在するゲート構造物を認識することができる。ゲート構造物としては、「ETC」、「一般」などの表示する表示板を支持するポール、料金収集作業を行う作業員が存在する建屋などが挙げられる。
【0010】
また、ゲート判定手段は、山型分布形状から車線数量分横方向に離れた位置で、自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に障害物が存在しない他のゲートが存在すると認識することが好適である。
【0011】
また、ゲート判定手段は、山型分布形状における単位時間当たりの形状の変化率に基づいて、ゲートの種別を判定するゲート種別判定手段を有し、ゲート種別判定手段は、変化率が判定基準値より大きい場合には、ETCゲートが存在すると判定し、変化率が判定基準値より小さい場合には、一般ゲートが存在すると判定する構成としてもよい。
【0012】
また、本発明による車両誘導システムは、前方環境認識装置を備え、ゲート判定手段によって認識されたゲートを通過するように自車両を誘導することを特徴としている。
【0013】
このような前方環境認識装置では、検出された物標の情報に基づいて、物標の平面分布形状を算出する。前方環境認識装置は、平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在するゲートが有ると認識することが可能である。これにより、ゲートの手前に他車両などの障害物が存在する場合であっても、自車両前方の物標の情報を検出して、ゲートを認識することができる。また、認識されたゲートを通過するように自車両を誘導することができる。
【0014】
さらに、複数のゲートのうち、自車両の車線変更量が最小となるゲートを選択し、選択されたゲートを通過するように自車両を誘導する構成としてもよい。
【発明の効果】
【0015】
本発明の前方環境認識装置、およびそれを備えた車両誘導システムによれば、ゲートの手前に車両が並んでいる場合であっても、自車両前方の物標の情報を検出してゲートを認識することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態に係る前方環境認識装置のブロック構成図である。
【図2】料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。
【図3】ECUで実行されるゲート位置認識処理の手順を示すフローチャートである。
【図4】ECUで実行されるゲート種別判定処理の手順を示すフローチャートである。
【図5】本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムである。
【図6】ECUで実行される目標通過ゲート選択処理の手順を示すフローチャートである。
【図7】料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同様の要素には同一の符号を付し、重複する説明を省略する場合がある。
【0018】
[第1実施形態]
図1は、本発明の第1実施形態に係る前方環境認識装置のブロック構成図である。前方環境認識装置1は、車両に搭載され、自車両の前方環境を認識するものである。前方環境認識装置1は、自車両前方の物標の情報を検出するミリ波レーダ2、およびミリ波レーダと電気的に接続された電子制御ユニット(以下、「ECU」という。)3を備えている。
【0019】
ミリ波レーダ2は、ミリ波を利用して前方の物体を検出するレーダである。ミリ波レーダ2は、自動車の前面側の中央に取り付けられている。ミリ波レーダ2では、ミリ波を自車両から前方に向けて出射し、物体で反射したミリ波を受信する。ミリ波レーダ2は、反射したミリ波を検出することで、自車両前方の物標の情報を検出する。ミリ波レーダ2は、検出された物標の情報をECU3に出力する。物標の情報には、ミリ波が反射した点(センサ認識物標点P、図2参照)の位置情報が含まれている。
【0020】
ECU3は、演算処理を行うCPU、記憶部となるROMおよびRAM、入力信号回路、出力通信回路、電源回路などにより構成されている。ECU3は、検出された物標の情報に基づいて、物標の平面分布形状H(図2参照)を算出する平面分布算出部31、およびゲート判定部32によって算出された平面分布形状Hに基づいて、ゲートG1〜G3の有無を判定するゲート判定部32を有する。なお、ゲートG1〜G3を区別する必要がないときは、ゲートGと記す。同様に、車両C1〜C4を区別する必要がないときは、車両Cと記し、山型分布形状Y1〜Y3を区別する必要がないときは、山型分布形状Yと記す。
【0021】
平面分布算出部31は、ミリ波レーダ2を介してセンサ認識物標点Pの位置情報を取得して、平面分布形状Hを作成する。図2に示すように、例えば、高速道路などの料金所のゲートGに車両Cが並んでいる場合には、これらの車両Cで反射したセンサ認識物標点Pが認識され、山型分布形状Yを含む平面分布形状Hが形成される。また、ゲートGに他車両Cが存在しない場合には、車両Cから反射するセンサ認識物標点Pが検出されないため、山型分布形状Yが形成されず、谷底形状が形成される。
【0022】
平面分布算出部31は、例えば、センサ認識物標点Pの分布状態を示す平面図を作成し、自車両側に分布するセンサ認識物標点Pを囲むように曲線を作成して平面分布形状Hを作成する。また、料金所手前に形成される山型分布形状Yは、車両の存在を示すものであるため、平面分布算出部31は、平面分布形状Hの作成に際し、ゲートGと車両Cの横幅(約3m)との位置関係を反映させる。また、料金所の通過待ちの車列の長さを判定することが主な目的であるため、平面分布形状Hの作成に際し、移動体(ゲートを通過する車両等)を反映させないようにする。
【0023】
また、料金所では、隣接する走行レーン間にゲート構造物Kが存在し車両が走行できない場所がある。これにより、隣接する走行レーン間では、車両Cからのセンサ認識物標点Pが検出されないため、山型分布形状Yに挟まれた谷型形状V12,V23が形成される。走行レーン間に存在するゲート構造物Kとは、例えば、「ETC」、「一般」などの表示板を支持するためのポールなどである。また、ゲート構造物Kとしては、料金収集作業を行う作業者が存在する建屋などがある。
【0024】
ゲート判定部32は、平面分布算出部31によって算出された平面分布形状Hから山型分布形状Yを判別する。ゲート判定部32は、平面分布形状Hを分析し、自車両側へ突出する形状を山型分布形状Yとして認識する。ゲート判定部32は、山型分布形状Yに対応する位置に障害物が存在し、この障害物の前方にゲートGが有ると認識する。
【0025】
また、ゲート判定部32は、平面分布形状Hを分析し谷型形状V12,V23を認識する。ゲート判定部32は、山型分布形状Yに対応する位置に、ゲート構造物Kが有ると認識する。
【0026】
また、ゲート判定部32は、山型分布形状Yから車線数量分、横方向に離れた位置で、車線方向において自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に他車両(障害物)が存在しないゲートが存在すると認識する。ゲート判定部32は、例えば、ナビ情報に基づいて、料金所における車線数量、車線幅に関する情報を取得することができる。
【0027】
次に、図3のフローチャートを参照して、前方環境認識装置1における動作について説明する。図3は、ECUで実行されるゲート位置認識処理の手順を示すフローチャートである。まず、ECU3は、ミリ波レーダ2から出力されたセンサ認識物標点Pの位置情報を入力する(ステップS1)。次に、ECU3は、センサ認識物標点Pの位置情報に基づいて、平面分布形状Hを作成する。
【0028】
続いて、ECU3は、平面分布形状Hから山型分布形状Yを判別したか否かを判定する。山型分布形状Yを判別した場合には、ステップS4に進み、山型分布形状Yを認識しない場合には、ここでの処理を終了する。
【0029】
ステップS4では、ECU3は、山型分布形状Yに対応する位置に、車両Cが存在し、これらの車両Cの前方にゲートGが有ると認識し、処理を終了する。
【0030】
このような前方環境認識装置1によれば、検出されたセンサ認識物標点Pに基づいて、物標の平面分布形状Hを算出し、この平面分布形状Hから、自車両側(走行レーンの後方側)へ突出する山型分布形状Yを判別することができる。また、前方環境認識装置1は、判別された山型分布形状Yに対応する位置に他車両Cが存在するゲートGが有ると認識することが可能であるため、ゲートGの手前に他車両Cなどの障害物が存在する場合であっても、自車両前方の物標の情報(センサ認識物標点P)を検出して、ゲートGを認識することができる。
【0031】
また、前方環境認識装置1によれば、前方認識カメラを用いずにミリ波レーダ2のみで、車両等のノイズを分離して、料金所の正確な位置を認識することができる。また、車両Cなどの障害物に着目してゲートGの位置を認識することができる。
【0032】
[第2実施形態]
次に、本発明の第2実施形態に係る前方環境認識装置1について説明する。第2実施形態に係る前方環境認識装置1の装置構成は、第1実施形態の前方環境認識装置1と同じである。第2実施形態の前方環境認識装置1のゲート判定部32では、料金所のETCゲートG2,G3と一般ゲートG1とを判別する機能を備えている。ゲート判定部32は、山型分布形状Yの単位時間当たりの形状の変化率に基づいて、ゲートGの種別を判定する本発明のゲート種別判定手段に相当する。
【0033】
ゲート判定部32は、平面分布算出部31によって算出された平面分布形状Hの変化率を算出し、ゲートGの種別を判定する。一般的に、ETCゲートG2,G3を通過する車両C2〜C4は、ETCゲートG2,G3ではない一般ゲートG1を通過する車両C1と比較して高速で移動する。そのため、ETCゲートG2,G3の手前に形成される山型分布形状Y2,Y3の形状の変化率Q2,Q3は、一般ゲートG1の手前に形成される山型分布形状Y1の形状の変化率Q1よりも大きくなる。
【0034】
ゲート判定部32は、山型分布形状Yの変化率Qが判定基準値Qthより大きい場合には、当該山型分布形状Y2,Y3に相当するゲートG2,G3は、ETCゲートであると判定し、山型分布形状Y1の変化率Q1が判定基準値Qthよりも小さい場合には、当該山型分布形状Y1に相当するゲートG1は、一般ゲートであると判定する。
【0035】
例えば、ETCゲートG2,G3を通過する車両C2〜C4は、15km/h以上で走行し、一般ゲートG1を通過する車両C1は、15km/h未満で走行する。また、山型分布形状Yからある閾値以上離れて存在する高速移動物体は、ゲート種別を判定するための対象から除外する。例えば、山型分布形状Y1から所定距離離れて位置で走行する車両C5は、対象から除外される。
【0036】
次に、図4のフローチャートを参照して、前方環境認識装置1における動作について説明する。図4は、ECUで実行されるゲート種別判定処理の手順を示すフローチャートである。ゲート種別判定処理は、ゲート位置認識処理が実行されて山型分布形状Yが判別された後に行われる。ゲート種別判定処理では、山型分布形状Yの形状の変化率Qを算出する(ステップS11)。例えば、山型分布形状Yの頂点の位置の単位時間当たりの進行方向の最大移動量を変化率として算出する。
【0037】
次に、ECU3は、算出された変化率Qが判定基準値Qthよりも大きいか否かを判定する(ステップS12)。変化率Qが判定基準値Qthよりも大きい場合には、ステップS13に進み、変化率Qが判定基準値Qthよりも小さい場合には、ステップS14に進む。
【0038】
ステップS13では、山型分布形状Yに相当するゲートは、ETCゲートであると判別し、ステップS14では、山型分布形状Yに相当するゲートは、一般ゲートであると判定する。続く、ステップS15では、ECU3は、判別されたゲート位置、およびゲート種別を記憶部に格納する。
【0039】
このように構成された前方環境認識装置1によれば、カメラ等を用いずに、ミリ波レーダ2によって取得された情報に基づいて、ゲート位置、およびゲート種別を認識することができる。前方環境認識装置1によって、ETCゲートと一般ゲートと識別することができるので、ETC搭載車であるか否かに応じて、適切なゲートを選択し誘導することができる。
【0040】
[第3実施形態]
次に、本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムについて説明する。図5は、本発明の第3実施形態に係る前方環境認識装置を備えた車両誘導システムである。図5に示す車両誘導システム10は、前方環境認識装置1、およびナビゲーション装置50を備えている。前方環境認識装置1は、上記の実施形態の前方環境認識装置1と同じである。
【0041】
ナビゲーション装置50は、自車両の現在位置を取得して、目的地までの経路案内を行うものであり、自車両の現在位置を検出するGPS51、およびこのナビゲーション装置全体の制御を司るナビゲーションECU(以下、「ナビECU」という。)60を有する。ナビECU60は、前方環境認識装置1のECU3と相互にデータ交換可能な構成とされている。
【0042】
GPS(Global Positioning System)51は、GPS衛星からの信号を受信して、自車両の現在位置を検出する。検出された自車両の現在位置に関する情報は、ナビECU60に送信される。
【0043】
ナビECU60は、演算処理を行うCPU、記憶部となるROM及びRAM、入力信号回路、出力信号回路、電源回路などにより構成されている。ナビECU60は、走行履歴判定部61、誘導経路設定部62、および地図DB63を有する。
【0044】
走行履歴判定部61は、自車両の走行履歴を認識し、認識した走行履歴に関する情報(以下、「走行履歴情報」という。)を記憶部に格納する。走行履歴判定部61は、記憶部に格納された情報を参照して、自車両の走行履歴を判定する。
【0045】
走行履歴判定部61は、例えば、高速道路などの自動車専用道路を走行した場合に、自車両の走行履歴として認識し、認識した走行履歴情報を記憶部に格納する。例えば、高速道路へ進入するための入口ゲートを通過した場合には、自動車専用道路を走行したとの走行履歴情報を記憶する。
【0046】
また、走行履歴判定部61は、自動車専用道路の本線から退出路へ移動した場合に、自車両の走行履歴として認識し、認識した走行履歴情報を記憶部に格納する。例えば、車速が基準速度より低下し、所定の操舵が行われた場合には、退出路へ移動したとの走行履歴情報を記憶する。なお、退出路を走行するための運転支援制御が実行された場合に、退出路へ移動したとの走行履歴情報を記憶してもよい。
【0047】
誘導経路設定部62は、設定された目的地までの誘導経路を探索し、経路誘導を行うものである。本実施形態の誘導経路設定部62では、前方環境認識装置1からゲート位置、ゲート種別に関する情報を取得して、所定のゲートを通過するように誘導経路を設定することができる。
【0048】
地図DB63は、地図情報を記憶するデータベースである。また、地図DB63は、自車両の走行履歴情報、ゲート位置に関する情報、およびゲート種別に関する情報など、各種必要な情報を記憶する。
【0049】
次に、図6のフローチャートを参照して、車両誘導システム10における動作について説明する。図6は、ECUで実行される目標通過ゲート選択処理の手順を示すフローチャートである。前方環境認識装置1のECU3は、ナビゲーション装置50から出力された情報を取得する。ECU3は、自動車専用道の走行履歴が有るか否かを判定する(ステップS21)。自車両が自動車専用道を走行したという走行履歴が有る場合には、ステップS22に進み、自動車専用道を走行したという走行履歴がない場合には、ここでの処理を終了する。
【0050】
ステップS22では、ECU3は、退出路への進入履歴が有るか否かを判定する。自車両が自動車専用道の本線から退出路へ移動した場合には、退出路への進入履歴があると判定し、ステップS23へ進む。自車両が本線を走行中である場合には、退出路への進入履歴がないと判定し、ここでの処理を終了する。
【0051】
ステップS23では、ECU3は、ナビゲーション装置50の地図DB63(ナビ情報)から料金所のゲート位置情報を取得したか否かを判定する。例えば、ナビ情報を参照し、自車両の現在地から距離が200m未満の範囲内に料金所のゲートGが存在すると認識した場合には、ゲート位置情報を取得したと判定し、ステップS24に進み、一方、ゲート位置情報を取得したと判定しない場合には、ここでの処理を終了する。
【0052】
ステップS24では、ECU3は、ミリ波レーダ2を用いたゲート位置認識処理を実行する。ECU3は、図3に示す処理(ステップS1〜S4)を実行し、センサ認識物標点Pに基づいて平面分布形状Hを作成し、平面分布形状Hから山型分布形状Yを認識する。ECU3は、山型分布形状Yに対応する位置に、ゲートGが存在すると認識し、ゲート位置を算出する。
【0053】
続くステップS25では、ECU3は、ステップS24で認識された複数のゲートから目標通過ゲートを選択する。ナビゲーション装置50では、前方環境認識装置1によって選択された目標通過ゲートの位置情報を取得して、当該ゲートを通過するように経路案内を行う。
【0054】
このような車両誘導システム10によれば、ナビゲーション装置50からの走行履歴情報に基づいて、料金所が有るか否かを予測したのちに、ミリ波レーダ2を用いたゲート位置認識処理を実行しているため、料金所を誤認識する可能性を低減することができる。ナビ情報を用いて料金所の存在を予め推測することで、例えば、橋、トンネル、看板など、走行車線を横切る物体を料金所として誤認識するおそれが低減される。
【0055】
[第4実施形態]
次に、本発明の第4実施形態に係る車両誘導システムについて説明する。第4実施形態に係る車両誘導システム10の装置構成は、第3実施形態の車両誘導システム10と同じである。第4実施形態のゲート判定部32では、認識された複数のゲートGから目標通過ゲートを選択する際の優先順位として、ゲートにおける混雑度よりも、車線変更移動量を重視している。すなわち、ゲート判定部32は、車線変更の移動量が少なくなるゲートを優先的に選択する機能を有する。
【0056】
図7は、料金ゲートおよび料金ゲート直前の車両群を示す概略平面図である。ここでは、ETC搭載車両である自車両C0が、複数のゲート候補Gから通過目標ゲートを選択する場合について説明する。前方環境認識装置1は、図3に示す処理を行い、複数のゲートGの位置を算出する。さらに前方環境認識装置1は、図4に示す処理を行い、ゲート種別を識別する。
【0057】
次に、前方環境認識装置1のゲート判定部32では、自車両C0の現在位置からゲート候補G2,G3までの横方向(路幅方向)の移動量を演算し、横方向の移動量が最も少なくなるゲートを目標通過ゲートとして設定する。
【0058】
例えば、図7に示す状態では、自車両C0は、ゲートG3を通過するより、ゲートG2を通過した方が、横方向の移動量が少なくなる。このような状態では、ゲート判定部32は、横方向の移動量が少なくなるゲートG2を目標通過ゲートとして設定する。
【0059】
また、ゲート判定部32は、横方向の移動量が等しい場合には、ゲートGの混雑度を考慮して、混雑度の低いゲートGを目標通過ゲートとして設定する。そして、ナビゲーション装置50は、ゲート判定部32で設定された目標通過ゲートを通過するように経路案内を実施する。
【0060】
なお、ゲートGの混雑度を判定する場合には、山型分布形状Yにおける山の高さ(車線方向の長さ)に基づいて判定することができる。山の高さが低い方が、山の高さが高い方よりもゲートの混雑度が低いと判定する。山型分布形状Yにおける山の高さとは、車線方向の長さである。また、自車両から山型分布形状Yのピーク(凸形状)の位置までの長さに基づいて、ゲートGの混雑度を判定してもよい。例えば、自車両からピークまでの車線方向の長さが短いほど、ゲートの混雑度が高いと判定する。
【0061】
このような第4実施形態に係る車両誘導システム10では、横方向の移動量が少なくなるゲートを通過するように、経路案内することが可能である。これにより、ゲート手前での車線変更の回数を減らすことができ、自車両が他車両と接触するおそれを低減することができる。また、横方向の移動量が等しい場合には、ゲートの混雑度を考慮して、目標通過ゲートGを設定することで、ゲートを通過するまでの経過時間が短くなるように、車両誘導を行うことができる。
【0062】
[第5実施形態]
次に、本発明の第5実施形態に係る車両誘導システムについて説明する。第5実施形態に係る車両誘導システム10の装置構成は、第4実施形態の車両誘導システムと同じである。第5実施形態に係るゲート判定部32では、認識された複数のゲートGから目標通過ゲートを選択する際の優先順位として、ゲートにおける混雑度よりも、車線変更移動量を重視している。例えば、本実施形態のゲート判定部32では、料金所を通過した後の進路を考慮して、目標通過ゲートを設定することが可能である。
【0063】
ここでは、図7を参照して、料金所を通過した後の誘導経路が道路R2を通る経路である場合について説明する。図7に示すように、料金所を通過した後には、左側へ湾曲する道路R1と、右側へ湾曲する道路R2とが分岐する分岐路が形成されている。
【0064】
ゲート判定部32は、ナビゲーション装置50からナビ情報を取得して、ゲートGを通過した後の進行方向を認識する。ゲート判定部32は、自車位置C0とゲート通過後の分岐点における進路R2の車線中心とを、地図データ上で結び(例えば、直線S2)、その直線S2上のゲートG3を優先的に目標通過ゲートとして設定する。または、横方向において、直線S2と自車両C0との間で、直線S2に近い側のゲートから順に混雑度の低いゲートを目標通過ゲートとして選択してもよい。
【0065】
このように、本実施形態の車両誘導システム10では、ナビゲーション装置50から経路案内情報を取得し、ゲート通過後の進行方向を考慮してゲートを選択することができるため、ゲート通過後の横方向の移動量が最小とすることができる。これにより、車線を横切るような進路変更を防止するとともに、燃費が最適となるような案内経路を選択することが可能となる。例えば、ゲートG2を通過した後に、道路R2へ進行する場合には、直線S1に沿って直進し、ゲートG2を通過した後に、直線S3に沿って、車線変更をする必要がある。しかしながら、車両誘導システム10では、ゲート通過後の進路を考慮して、道路R2に近いゲートG2が選択されるため、ゲート通過後の横方向の移動量を減らすことができるため、他車両との接触のおそれを低減することができる。
【0066】
以上、本発明をその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。また、上記実施形態では、谷型形状V12,V23を判別し、判別された谷型形状に対応する位置にゲート構造物が存在していると認識する構成としているが、谷型形状を判別、識別しない構成でもよい。要は、センサ認識物標点Pに基づいて、平面分布形状Hを作成し、平面分布形状Hから山型分布形状Yを判別してゲートGの有無を判別可能であればよい。
【0067】
また、上記実施形態の前方環境認識装置1では、前方認識を行うためのカメラを備えていない構成としているが、前方認識用のレーダの他にカメラを備える構成としてもよい。また、ミリ波レーダ2に代えて、その他の検出手段によって、センサ認識物標点Pを検出し、検出されたセンサ認識物標点Pに基づいて、平面分布形状Hを算出してもよい。
【符号の説明】
【0068】
1…前方環境認識装置、2…ミリ波レーダ、3…ECU、31…平面分布算出部(平面分布形状算出手段)、32…ゲート判定部(ゲート判定手段)、10…車両誘導システム、50…ナビゲーション装置、51…GPS、60…ナビECU、61…走行履歴判定部、62…誘導経路設定部、63…地図DB、C0…自車両、C、C1〜C4…車両、G,G1〜G3…ゲート、H…平面分布形状、K…ゲート構造物、P…センサ認識物標点、R…道路、Y,Y1〜Y3…山型分布形状、V12,V23…谷型形状。
【特許請求の範囲】
【請求項1】
自車両前方の物標の情報を検出し、検出された物標の情報に基づいて、前方環境を認識する前方環境認識装置において、
検出された物標の情報に基づいて、物標の平面分布形状を算出する平面分布形状算出手段と、
前記平面分布形状算出手段によって算出された平面分布形状に基づいて、ゲートの有無を判定するゲート判定手段と、を備え、
前記ゲート判定手段は、
前記平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在し当該障害物の前方に前記ゲートが存在すると認識することを特徴とする前方環境認識装置。
【請求項2】
前記ゲート判定手段は、
隣接する前記山型分布形状の間に形成された谷型形状を判別し、判別された谷型形状に対応する位置に、ゲート構造物が存在していると認識することを特徴とする請求項1記載の前方環境認識装置。
【請求項3】
前記ゲート判定手段は、
前記山型分布形状から車線数量分横方向に離れた位置で、自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に障害物が存在しない他のゲートが存在すると認識することを特徴とする請求項1または2記載の前方環境認識装置。
【請求項4】
前記ゲート判定手段は、
前記山型分布形状における単位時間当たりの形状の変化率に基づいて、ゲートの種別を判定するゲート種別判定手段を有し、
前記ゲート種別判定手段は、
前記変化率が判定基準値より大きい場合には、ETCゲートが存在すると判定し、
前記変化率が判定基準値より小さい場合には、一般ゲートが存在すると判定することを特徴とする請求項1〜3の何れか一項に記載の前方環境認識装置。
【請求項5】
請求項1〜4の何れか一項に記載の前方環境認識装置を備え、
前記ゲート判定手段によって認識された前記ゲートを通過するように自車両を誘導することを特徴とする車両誘導システム。
【請求項6】
複数の前記ゲートのうち、自車両の車線変更量が最小となるゲートを選択し、選択されたゲートを通過するように自車両を誘導することを特徴とする請求項5記載の車両誘導システム。
【請求項1】
自車両前方の物標の情報を検出し、検出された物標の情報に基づいて、前方環境を認識する前方環境認識装置において、
検出された物標の情報に基づいて、物標の平面分布形状を算出する平面分布形状算出手段と、
前記平面分布形状算出手段によって算出された平面分布形状に基づいて、ゲートの有無を判定するゲート判定手段と、を備え、
前記ゲート判定手段は、
前記平面分布形状から、自車両側へ突出する山型分布形状を判別し、判別された山型分布形状に対応する位置に障害物が存在し当該障害物の前方に前記ゲートが存在すると認識することを特徴とする前方環境認識装置。
【請求項2】
前記ゲート判定手段は、
隣接する前記山型分布形状の間に形成された谷型形状を判別し、判別された谷型形状に対応する位置に、ゲート構造物が存在していると認識することを特徴とする請求項1記載の前方環境認識装置。
【請求項3】
前記ゲート判定手段は、
前記山型分布形状から車線数量分横方向に離れた位置で、自車両と反対側へ凹む谷底形状が検出された場合に、当該谷底形状に対応する位置に障害物が存在しない他のゲートが存在すると認識することを特徴とする請求項1または2記載の前方環境認識装置。
【請求項4】
前記ゲート判定手段は、
前記山型分布形状における単位時間当たりの形状の変化率に基づいて、ゲートの種別を判定するゲート種別判定手段を有し、
前記ゲート種別判定手段は、
前記変化率が判定基準値より大きい場合には、ETCゲートが存在すると判定し、
前記変化率が判定基準値より小さい場合には、一般ゲートが存在すると判定することを特徴とする請求項1〜3の何れか一項に記載の前方環境認識装置。
【請求項5】
請求項1〜4の何れか一項に記載の前方環境認識装置を備え、
前記ゲート判定手段によって認識された前記ゲートを通過するように自車両を誘導することを特徴とする車両誘導システム。
【請求項6】
複数の前記ゲートのうち、自車両の車線変更量が最小となるゲートを選択し、選択されたゲートを通過するように自車両を誘導することを特徴とする請求項5記載の車両誘導システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−214914(P2011−214914A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−81628(P2010−81628)
【出願日】平成22年3月31日(2010.3.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年3月31日(2010.3.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]