
力学量測定装置及び方法
【課題】振動や動ひずみが計測可能なワイヤレスひずみセンサにおいて、低ノイズで高精度な測定を実現しながら、同時に消費電力を低減し、バッテリ取り替え寿命の低減や、微小容量の電源での駆動を実現する。
【解決手段】ワイヤレスひずみセンサモジュールで動ひずみを測定する際に、ひずみセンサからの出力を、フィルタでフィルタリングし、整流・平滑化回路で整流・平滑化してから、CPUでデータ処理をして、無線通信を行うことにより、データ処理CPUのサンプリング周期を長くでき、また、無線通信するデータ量が小さくなるので、CPU,無線通信の消費電力を低減することができる。
【解決手段】ワイヤレスひずみセンサモジュールで動ひずみを測定する際に、ひずみセンサからの出力を、フィルタでフィルタリングし、整流・平滑化回路で整流・平滑化してから、CPUでデータ処理をして、無線通信を行うことにより、データ処理CPUのサンプリング周期を長くでき、また、無線通信するデータ量が小さくなるので、CPU,無線通信の消費電力を低減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、センサで得た情報を伝送して、力学量の計測を行うシステムに関する。
【背景技術】
【0002】
従来、構造物の寿命評価や異常診断のために動ひずみの計測が行われてきた。橋桁等の構造物では、測定者の容易に近付けない場所での計測も必要となることから、ひずみセンサと送信機から構成されるセンサモジュールを被測定物に取り付け、測定者の近くに受信機と解析装置を置いて、ワイヤレスで測定されることも多い。また、モータやエンジンで駆動して移動する装置などに取り付けて、離れたところから異常監視を行うことも行われている。
【0003】
【特許文献1】特開2005−114443号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
これらの場合には被測定物近傍に適当な電源線が無く、ひずみセンサと送信機はバッテリで駆動することが多い。動ひずみを測定する場合にはセンサモジュール内のCPU等の制御部や通信部を絶えず動作させる必要があり、バッテリの消耗が激しいという問題があった。例えば、ゆっくりしたひずみの変化を計測するためには、計測の制御装置や通信部等を間欠動作させることによって、バッテリの消耗を防止することができる。しかしながら、比較的速い周期的なひずみの変化や不定期に起こる現象を計測する場合には、ひずみのピーク値を取り逃がさないように、計測の制御装置や通信部等を常に動作させる必要があるためにバッテリの消耗が激しくなる。よってバッテリの取り替えを頻繁に行わなければならない等の問題がある。また同様に、従来はセンサモジュールの消費電力が大きいため、太陽電池等の微小容量電源での駆動が不可能であった。
【0005】
よって動ひずみをワイヤレスで測定する場合でも、低消費電力で動作し、バッテリの取り替えの頻度が低いシステムが望まれている。
【0006】
よって本発明は、前記課題の何れかを抑制することができる動ひずみ計測システムを提供する。特に振動等、周期的で比較的速いひずみ振幅を取得するのに、低消費電力でバッテリの取り替え頻度が低く、太陽電池等の微小容量電源での駆動も可能である動ひずみ計測システムを提供する。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、センサモジュール内にひずみセンサからの出力をフィルタリングするバンドパスもしくはハイパスフィルタを設け、さらに該フィルタからの出力を整流し、平滑化する回路を設け、この平滑化された値を送信機で送信する。これによって、ひずみセンサで得た周期的な動ひずみのうち、特定の周波数帯域、もしくは特定の周波数以上の帯域のみを取り出し、これを整流,平滑化することで、その周波数帯域の振幅の大きさのみを取り出すことができる。ある周波数帯域における周期的な動ひずみを計測する場合には、該動ひずみの振幅に比例した一定の直流電圧が得られるため、センサモジュールが間欠的にセンシングや通信を行った場合でも、精度の高い計測が可能となる。よって間欠通信が可能となるために、バッテリの取り替え頻度を極端に短くすることや、太陽電池等の微小容量電源での駆動が可能となった。なお、以下では力学量センサの代表例であるひずみセンサについて主に説明する。
【発明の効果】
【0008】
本発明により、送受信部が送信する計測データを少なくすることができ、電力消費量が特に大きい送受信部の消費量を低減することができる。また、測定に用いるCPU等の消費電力を低減させることができる。これによって、バッテリ消費量を低減し、バッテリ充電や交換回数の低減をする、または、バッテリを小型化してセンサチップを有する力学量測定装置を小型化することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【実施例1】
【0010】
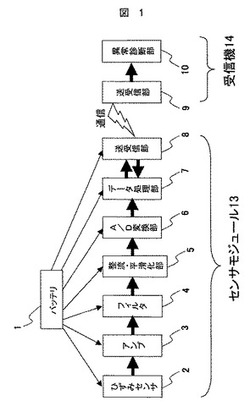
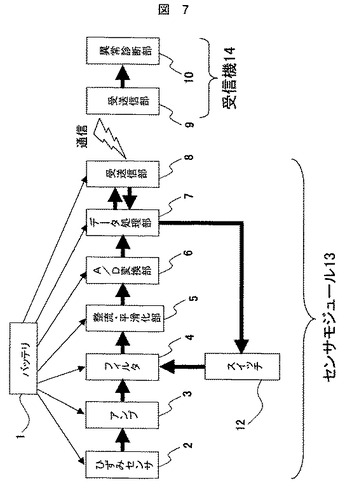
図1に本発明における動ひずみ計測システムを示す。本実施例では、ほぼ周期的なひずみ変動を持つ構造物や機器に、該計測システムを取り付ける。該システムは、図1に示すように、センサモジュール13に備えられたバッテリ1,ひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5,A/D変換部6,データ処理部7,送受信部8,受信機
14に備えられた送受信部9,異常診断部10から構成されている。本システムは、その計測仕様等によって、若干はその構成が変更されることがあるが、その場合でも、ひずみセンサ2,フィルタ4,整流・平滑化部5,データ処理部7,送受信部8は必要である。ひずみセンサ2は、従来からひずみゲージとして知られる、フィルム上に薄膜の細線が形成されたものや、圧電素子を用いたものでもよいが、シリコンチップ上にひずみセンサが形成されたものであれば、耐ノイズ性,感度,消費電力低減の観点から最も良い。また、フィルタ4はバンドパスフィルタが望ましいが、用途によっては低周波成分のみをカットするハイパスフィルタでも良い。また、フィルタ4を構成する素子のうち、その幾つかはシリコンチップ外に外付け部品として取り付けられても良い。
【0011】
被測定物のひずみは、比測定物の表面や内部に設けられた該ひずみセンサ2によって電気的信号としてセンシングされる。該センシングデータはアンプ3で増幅された後、フィルタ4によって特定周波数領域の信号だけ取り出される。さらに整流・平滑化部5によって、該動ひずみの振幅に比例した一定の直流電圧を得る。この値をA/D変換部6によってデジタル化し、このデジタル値をデータ処理部7と送受信部8で間欠的に送信する。なお、A/D変換部6とデータ処理部7は、市販の1チップCPUを用いても良く、その場合には消費電力をより小さく出来るという利点が生じる。
【0012】
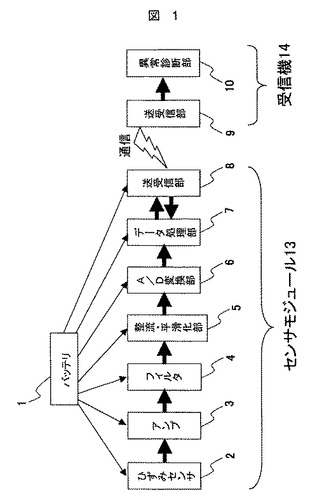
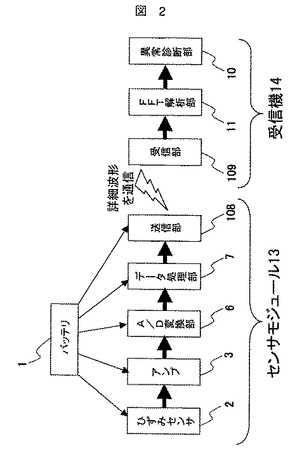
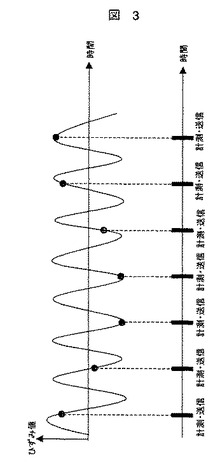
ここで、本発明との比較を行うために、図2を用いて従来のシステムの詳細を説明する。従来は、ひずみセンサ2からの出力はアンプ3を通してA/D変換部6に入力され、
CPU等のデータ処理部7と受送信部8の連携によりほぼ連続的に動作していた。すなわち、比較的高周波の動ひずみを計測する場合には、ほぼ常時、CPU等のデータ処理部7を動作させて、細かい波形全体の計測を行わないと高精度な測定は不可能となる。例えば、図3に示すように周期的な高周波ひずみ振幅を計測しようとする場合において、間欠的なセンシングを行うと、ピーク位置がセンシング出来ない場合があるため、正確にひずみ振幅を求めることが出来ない。そこでひずみの変化を正確にトレースするようにセンシングする必要があり、そのためにはひずみセンサ2とCPU等のA/D変換部6やデータ処理部7をほぼ常時動かして、ひずみ波形を詳細に取得することが必須となる。このようにCPU等のA/D変換部6やデータ処理部7やひずみセンサ2を常時動かすためにバッテリの消耗が早く、バッテリの早期交換を余儀なくされてきた。さらに常時センシングしたデータはセンサモジュール13内で蓄積、もしくは処理しようとしても限界があるために、外部に頻繁に送信し、受信機14内でFFT(Fast Fourier Transform)解析部11によって周波数分析を行う必要がある。このように、通信を頻繁に行うことによってさらにバッテリの消耗が早くなり、バッテリの早期交換を余儀なくされてきた。
【0013】
よって従来のシステムでは、高精度な計測と低消費電力なセンシングを両立させることが難しかった。
【0014】
これに対して本実施例では、フィルタ4と整流・平滑化部5によって、ひずみ振幅に比例した直流信号に変換できるので、ある短時間だけCPU等のA/D変換部6やデータ処理部7を動かすだけで、ひずみ振幅の値を直流値として得ることが出来る。よって、ひずみ振幅の測定精度はCPU等のA/D変換部6のサンプリング周期の影響を受け難く、間欠的にセンシングを行った場合においても高精度にひずみ振幅の情報を得ることが可能となる。すなわち従来のようにひずみ値の時々刻々の変化をすべてセンシングして、その膨大なデータを送信するのではなく、本実施例ではひずみ振幅の値のみをCPU等のA/D変換部6やデータ処理部7で間欠的に扱ってRAM等の記憶手段(図示せず)に記録し、記憶手段に蓄えたデータを送受信部8で間欠的に通信できるので、データ処理や通信に必要なエネルギも少なくて済むという利点がある。すなわち、従来と比較して、CPUや通信部で取り扱う情報量が非常に小さくなるので、結果的にセンサモジュールの消費電力を非常に小さく出来、バッテリの長寿命化を可能とすることができる。さらに、ひずみセンサ2の直後でフィルタリング処理や整流・平滑化処理をしているために、ノイズに強いという利点も生じる。さらに本実施例では、FFT解析を受信側で行う必要が無いので、受信機14もコンパクトに出来るという利点が生じる。
【0015】
なお本実施例では、送受信はワイヤレスで行っているが、有線で送受信をおこなっても、ノイズに強いという利点がある。また、バッテリのような電力供給手段としては、電池,充電電池,キャパシタ,コンデンサ等内部に電力を蓄えるものがあり、太陽光や振動で発電する発電手段を設けてもよい。いずれでも、消費電力低減による電力供給手段の長寿命化やコンパクト化の効果がある。
【0016】
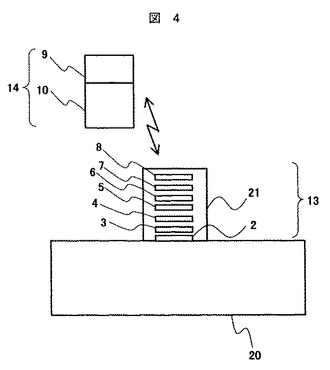
図4には、本システムの実装形態を示す。被測定物20表面近傍にひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍にアンプ3,フィルタ4,整流・平滑化部5,A/D変換部6,データ処理部7,送受信部8,バッテリ1を有し、これらを容器21が覆っている。被測定物20に発生するひずみが大きい場合にはこのような実装方法が望ましい。本実施例によれば、センサモジュール13の消費電流が小さくできるため、バッテリ1も小型で済み、全体的に場所を取らないで設置できるという利点が生じる。ひずみの変化の最も大きい場所は角部等の応力集中箇所であることが多く、システムが小型に出来るため、角部等の狭い場所にも設置することができるという利点が生じる。
【実施例2】
【0017】
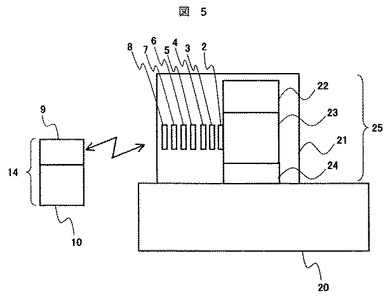
さらに図5には微小振動を計測するのに適したシステムの実装形態を示す。本実施例では、被測定物20の振動を計測するために、被測定物20に接触して、取り付け部24が接着,接合,埋め込み、の何れかの手法で設けられており、バネ様物質23にその振動が伝達される。バネ様物質は、例えばつる巻き状のバネ,板バネや弾性物質等であり、被測定物20や半導体チップ15よりもバネ剛性の低い物体である。バネ様物質23では、バネ様物質23より密度の大きい重量物質22に接続されていることから、重量物質22の慣性力が働くために、振動が大きなひずみに変換される。バネ様物質23表面近傍にはひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、バネ様物質23のひずみの変化を捉えることで振動を検知する。本実施例によれば、微小振動を大きな振動に変換してからひずみセンサ2で検出し、センサモジュール13の消費電流が小さくできるため、バッテリ1も小型で済み、全体的に場所を取らないで設置できるという利点が生じる。
【0018】
被測定物20として、モータやエンジンを具備した装置を考えると、そのモータやエンジンに固有の振動周波数をセンシングできるようにフィルタ4の遮断周波数や中心周波数を決定しておくことにより、モータやエンジンの異常検知が可能になるという利点がある。すなわち、モータやエンジンの異常時には、発生する振動周波数が変化することから、本システムにおいて計測するひずみ振幅の値が変化するため、本システムのセンシングデータを受信することで、異常を検知することが可能となる。従来では加速度計やひずみセンサからの信号をワイヤレス電送した後に、FFT解析等により分析するという複雑な処理が必要であったが、本システムを用いれば簡単な処理で済むため低消費電力で小型なシステムを実現できるという利点が生じる。
【0019】
なお、図4と図5においては、各回路要素2〜8を積み上げるようにして実装する場合を示したが、1つのボードに実装しても良いし、各要素が接続されていれば良い。
【実施例3】
【0020】
<複数フィルタ>
図6には、フィルタ4a,4bを複数設けた実施例を示す。本実施例では、フィルタの遮断周波数や中心周波数を変えたフィルタ4a,4bを複数設けてあり、フィルタ4aの出力を整流・平滑化手段5aが整流・平滑化し、フィルタ4bの出力を整流・平滑化手段5bが整流・平滑化する。本実施例によれば、各種の周波数ひずみ変動が混在したセンシングデータから、特定の周波数帯域のひずみ変動を取り出して、そのひずみ振幅を直流信号で得られ、かつその周波数を変えた場合のひずみ振幅の値を送信することができる。すなわち、実施例1のCPUや通信部で取り扱う情報量が非常に小さくなるので、結果的にセンサモジュールの消費電力を非常に小さく出来、バッテリの長寿命化を可能とすることができるという利点を備え、かつ複数の周波数域のひずみ振幅を測定して、より複雑で高精度な測定を行うことができるという利点を本実施例では有する。
【実施例4】
【0021】
なお、図7に示すように、フィルタ4の遮断周波数や中心周波数をスイッチで切り替えられるようにして、単一のフィルタ4で複数の周波数域の振動を取り出すようにしても良い。具体的にはフィルタ4を構成する抵抗(図示せず)の値やコンデンサ(図示せず)の容量をスイッチ12で切り替えても良い。この場合にはフィルタ4が1つで済むので、消費電力が低減できるという利点,装置を小型化できるという利点、予め固有振動数等の測定したい周波数がいくつか決まっている場合に、柔軟にその周波数だけ選択して測定することが出来、他の周波数領域まで測定しなくても良い分、エネルギ消費量を減少させることが出来るという利点等が生じる。また、一つのフィルタ4で、多くの周波数帯域を測定することができるので、木目細やかな測定を行うことができる。
【0022】
フィルタ4が測定を行う周波数は、あらかじめセンサモジュール13内のROMやRAM等に記憶された周波数帯域に従って順番に切り替えても良い。この場合、ある周波数帯域を所定の時間,ひずみ測定を行った後、周波数域を変更し、別の周波数域のひずみ測定を行う。また、受信機14を操作し、受信機14からセンサモジュール13に指令を送信してフィルタ4の周波数域を変更しても良い。
【実施例5】
【0023】
図8には、半導体チップ15上にひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5を形成した実施例を示す。ひずみの変化をひずみセンサ2で計測し、アンプ3で増幅し、その値をフィルタ4においてフィルタリングし、これを整流・平滑化部5で直流化した後にパッド16に出力する。フィルタ4はバンドパスフィルタでも良いし、ハイパスフィルタでも良い。また、フィルタ4の後段にアンプ(図示せず)を設けても良いし、整流・平滑下部5の後段にアンプを設けても良い。システムの用途と入力されるひずみ信号レベルに応じて、アンプは必要な箇所に設けられるのが望ましい。
【0024】
フィルタ4がバンドパスフィルタである場合には、その周波数帯域の信号のみを取り出すことが出来ることから、固有振動数等の測定したい振動数が明確である場合に非常に有効である。測定したい振動数のひずみ振幅の増減で、異常検知が可能である。また、ハイパスフィルタである場合には、明確な振動数は決まっていないが、異常時に高周波振動が増えることが明らかになっているモータやエンジン等の場合に適し、高周波振動の増減で機器の状態を把握するのに好適である。
【0025】
本実施例におけるひずみセンサ2としては、半導体基板表面に局所的に不純物拡散層を設けたものを用いる。これによって半導体基板上にトランジスタやダイオード等の素子と該ひずみセンサを混載でき、ほぼ同じ製造プロセスで作成できることから、高感度,低消費電力とノイズ耐性を両立させることができる。すなわち、微小な高周波ひずみを検知したい場合に、高感度なひずみセンサ2で微小なひずみの変化を検知し、同じ半導体基板上でアンプ3を用いてノイズが最小になるように信号を増幅し、同じ半導体基板上のフィルタ4で目的となる周波数帯域の信号だけ選別できる。ひずみセンサ2とアンプ3が別チップになっている場合には、ここでノイズが入りやすく、フィルタ4でフィルタリングしてもノイズを拾うことになりかねない。また、アンプ3とフィルタ4が別チップになっている場合、およびフィルタ4と整流・平滑化部5が別チップになっている場合のいずれかでも、実際上前段のアンプ3の倍率を高く出来ないことから、ノイズが混入しやすく高精度な計測が実現出来ない。すなわち、ひずみセンサ2、アンプ3,フィルタ4,整流・平滑化部5までの回路を1つの半導体基板上に構成して半導体チップ15とすることではじめて、微小なひずみ変化を計測する場合においても十分なノイズ耐性を有し、高精度な動ひずみ計測が可能なシステムとすることが出来る。
【0026】
本チップを用いることにより、基板ボード上に各種の電子パーツを混載してはんだ付けした場合に比べて、各種の利点が生じる。本実施例では、半導体基板から構成される半導体チップ15上に各種の電子回路と微小なひずみセンサを形成しているので、外部ノイズの混入が少なく、耐ノイズ性に優れるという利点がある。よって、微小なひずみ信号でも高精度に測定が可能であり、高精度な動ひずみ計測や異常診断が可能となる。また、回路を形成する各素子が低消費電力で動作するので、全体としてセンサモジュール13の消費電力を低減することが出来、さらにバッテリの消耗を抑えることが出来るという利点がある。さらに、1チップ化することで小型化が図れることから、応力集中場等の微小部のひずみ計測にも適用できるようになるという利点も生じる。
【0027】
なお、比較的低周波領域を遮断周波数とするフィルタを用いる場合には、半導体チップ15に外付けするコンデンサや抵抗が必要になる場合もあるが、その場でも上記と同様な利点がある。
【0028】
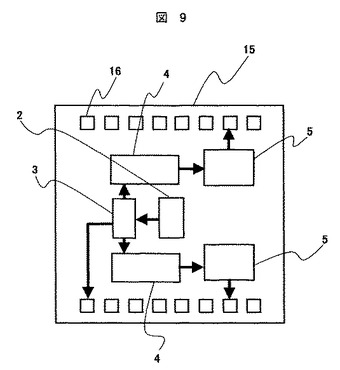
図9には、半導体チップ15上に複数チャンネルのフィルタ4を設けた例を示したものである。この場合にはフィルタ4の遮断周波数や中心周波数をそれぞれ異なるものに設定し、フィルタリングした各出力は異なるパッド16から出力される。本発明の実施例1のフィルタを複数設けた場合と同様な利点がある。さらに本実施例では、1チップに全ての回路を形成しているので、複数チャンネル設けても消費電力の増加が抑えられるという利点がある。さらに複数チャンネル設けても、装置が大型化することがないという利点がある。また、チャンネル数を多数設けることで、半導体チップ15上でFFT解析と同様な機能を持たせることが可能となる。すなわち、周波数ごとの振動強度やひずみ強度を半導体チップ15上の複数のパッド16からそれぞれ出力することが可能となる。この出力を別に設けたA/D変換部6,データ処理部7,送受信部8に接続することで、チャネル毎の振動強度やひずみ強度を送信することが出来る。これにより実際のひずみ波形をそのまま高速に送信する場合と比較してデータの情報量を少なくすることが出来、通信に要するエネルギを小さくすることが可能である。また、受信側でFFT処理を行わなくても良いために、受信側の装置が、例えば低速CPUを用いた携帯端末等の限られたデータ処理機能を持つものでもよいという利点も生じる。
【0029】
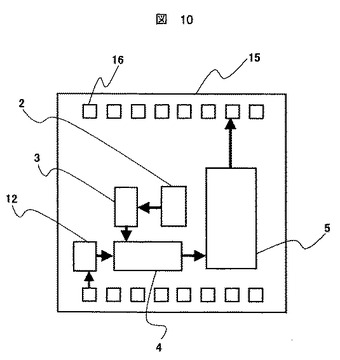
図10には、フィルタ4は1種類であるが、スイッチを用いてその遮断周波数もしくは中心周波数を変更できる機能を持った半導体チップ15を示す。具体的にはフィルタ4に付随するコンデンサ容量や抵抗をスイッチで切り替える、もしくは可変にすることで、任意の周波数を選択し、そのひずみ強度や振動強度を計測するものである。本方法は、図8に示した実施例に比べて回路が簡単になる、より低消費電力で動作させることができるというメリットがある。
【0030】
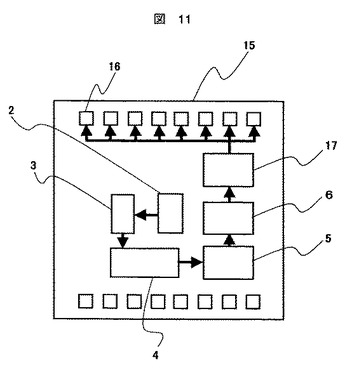
図11は半導体チップ15上にひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5,CPU17を形成した実施例を示す。図8に示した実施例の利点に加え、さらに低消費電力化が図れるというメリットがある。すなわち、図8に示した実施例では、整流・平滑化部5からA/D変換部6の間にアンプが必要な場合が多かったが、図11に示すシステムでは半導体チップ15上に全て混載できることから、アンプの数を減らすことが出来、その分だけ消費電力を低減することが出来る。
【0031】
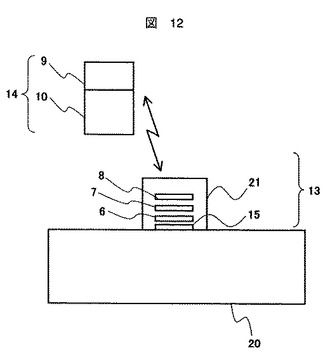
図12には本システムの実装形態を示す。被測定物20表面近傍に半導体チップ15が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍に半導体チップ15,A/D変換部6,データ処理部7,送受信部8,バッテリ1を有し、これらを容器21が覆っている。図4で説明した事項と同様な利点があるが、さらに半導体チップ
15を用いたことでコンパクト,低消費電力となるというメリットが生じる。さらに図
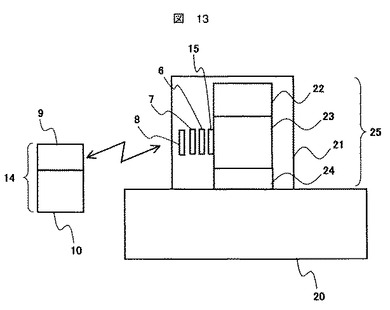
13には微小振動を計測するのに適した実装形態を示す。これも図5で説明したのと同様なメリットがあるが、さらに半導体チップ15を用いたことでコンパクト,低消費電力となるというメリットが生じる。
【0032】
なお、図12と図13においては、各回路要素を積み上げるようにして実装する場合を示したが、半導体チップ15以外は1つのボードに実装しても良いし、各要素が接続されていれば良い。半導体チップ15はひずみを測定する箇所であるので、他の部材から拘束されることのないように配置するのが望ましい。
【実施例6】
【0033】
以下では、0.1Hz から10Hz程度の中程度の変化速度を持つ動ひずみを計測し、その計測値から寿命評価を行うという用途についての実施例を示す。図14にシステム構成を示す。図4または図5に示すものと同様に、被測定物20表面近傍にひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍にアンプ3,A/D変換部6,ひずみ頻度解析部18,送受信部8,バッテリ1を有し、容器21がこれらを覆っている。通常、被測定物20のひずみをひずみセンサ2で計測し、アンプ3でこれを増幅し、さらにA/D変換部6でデジタルデータに変換する。そして一定時間内に観察されたひずみ振幅を、その大きさに応じて分類し、頻度分布としてひずみ頻度解析部18にてカウントする。この、ひずみレベルと頻度分布の組み合わせを、送受信部8から送信する。A/D変換部6,ひずみ頻度解析部18はCPUとして1つのデバイスであることが望ましい。
【0034】
このような寿命評価を行うためのシステム自体は、例えば特開2002−357487号公報に記載されているように、バッテリ消費量の低減が課題となっている。すなわち、このような中速の動ひずみを計測して、頻度分布を得るには、A/D変換部やCPUを常時動かしておく必要があり、そのためにバッテリ1の消耗が激しいという問題があった。
【0035】
さらに該システムは中程度の変化速度を持つひずみを専用で計測するシステムであったが、該システムで計測できない高速の動ひずみ変化によって構造物の異常が見つかる実例も出てきている。すなわち、高周波の範囲のひずみ変化と中程度のひずみ変化を持つ場合の両者を計測する必要が出てきた。
【0036】
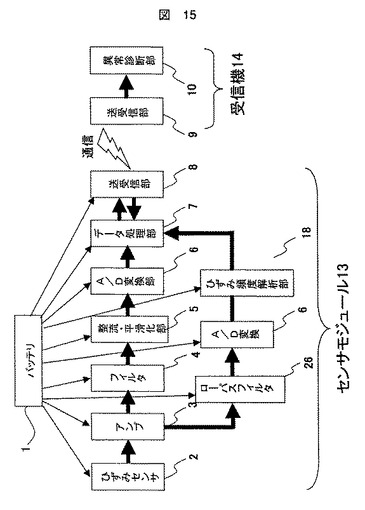
図15には、この課題を解決した本発明の実施例を示す。ひずみセンサ2からの出力はアンプ3で増幅され、一方はフィルタ4を通り、整流・平滑化部5に接続される。他のアンプ3からの出力は、ローパスフィルタ26を通り、そのままA/D変換部6に接続される。また、用途によってはローパスフィルタ26が不要である場合もある。フィルタ4はバンドパスフィルタかハイパスフィルタが望ましい。本実施例によれば、高周波の範囲のひずみ変化は、フィルタ4により取り出し、整流・平滑化部5によって直流化してからA/D変換してデータ処理部7で間欠的に計測することができる一方で、低速度から中速度域のひずみ変化に対するひずみ計測は、比較的測定頻度が少なくて済むので、測定波形を整流・平滑化部5で直流化せずに直接A/D変換してデータ処理部7でほぼ連続的にデータ処理を行うことが出来る。すなわち、従来の方法では、高周波の範囲のひずみ変化と低から中速程度のひずみ変化を持つ場合の両者を計測する場合には、両者とも連続してCPUを動かしてセンシングを行う必要があるために、1つのCPUで同時に測定することは困難であった。すなわち、1つのCPUは中速程度のひずみ変化を計測して、ひずみ振幅のレベルに分類しながらカウントすることを連続して行い、また他のCPUは、高速の動ひずみを、その波形を忠実に計測するために連続して計測動作する必要があった。しかしながら本実施例では、間欠的に高速の動ひずみを計測することが可能なため、独立した2つのCPUが無くても計測できることから、その分だけバッテリの消耗が少なく、小型のシステムを実現できるという利点がある。また、1つのセンサを被測定物に設置するだけでよいので作業性や信頼性が格段に向上するという利点がある。なお、図15ではひずみセンサ2は1つであるが、高速用と低・中速用の2つのセンサを設けても良い。
【実施例7】
【0037】
構造物の寿命評価を行う目的で、低中速の動ひずみを計測して頻度分布をカウントするワイヤレス通信モジュールにおいては、A/D変換部やCPUを常時動かしておく必要があり、そのためにバッテリ1の消耗が激しいという問題があった。
【0038】
通常、このようなシステムの消費電力低減のためには、モジュールの間欠動作を行うことが一般的に行われる。これはCPUに内蔵されたタイマやカウンタを利用して一定時間ごとにCPUのメイン回路やセンサ回路,アンプ回路等に電源を入れて計測を行い、計測終了後にはカウンタやタイマ等をセットして休止動作に入るものである。しかしながら、休止期間に大きなひずみ変動があると不正確な計測結果にならざるを得ないために、従来は構造物の寿命評価において間欠動作は採用されなかった。
【0039】
以下では、動ひずみを計測して寿命評価を行うシステムにおいて、間欠動作を取り入れることでバッテリの消費量を減少させるとともに、精度の高い計測が可能となる本発明の実施例を示す。
【0040】
我々は、鉄橋,橋脚等の大型構造物や建築物の動ひずみ計測を行った結果、全体の計測時間のうち、数百με以下のひずみの低い時間の割合が大部分であることを見つけた。また、大きなひずみが負荷される場合には、その前兆として秒オーダで事前にひずみ上昇の予兆が見られることがわかった。すなわち、橋脚等の大型構造物では車や鉄道車両が近づくために事前にひずみの上昇が見られることや、橋脚自体の固有振動数が小さいことから、大きなひずみ変化の予兆が秒オーダで事前に現れることがわかった。ここで、大型構造物とは、例えば、橋(鉄橋,コンクリート橋,橋脚等含む),大型建造物(ゲート,ビル,ダム,トンネル,堤防等含む)等のことである。
【0041】
本発明ではこの知見を利用し、ひずみが十分小さくて、それが維持される場合には、間欠動作を行って監視し、ひずみが上昇し始めたことを検知した時点で連続動作に移行することで、低消費電力と高精度計測とを両立させることに成功した。以下に詳細を示す。
【0042】
図16には本実施例におけるセンサモジュール13の動作フローを示す。まず、寿命を推定するために計測する期間(計測時間)をセンサモジュール13に入力し、さらに間欠動作モードでのセンシング休止時間と、CPUを連続動作モードとするためのひずみセンサ計測値の変化量をセンサモジュールに入力する。計測が開始されるとセンサモジュールは間欠的にセンシングを行い、センシング値の変化量が予め設定された変化値を超えた場合には連続動作モードに入ることを特徴とする。その後、連続的にセンシングを行ってひずみの波形を測定し、ピーク値やひずみ振幅の計測を行う。さらにこのひずみ振幅の値を幾つかのレベルに分けて、そのレベルでの回数をカウントする。そのカウント方法は、一般的にレインフロー法や応力レベルクロスカウント法と呼ばれるものと同様である。さらに、ある一定期間において計測値の変化量が予め設定された変化値を下回った場合には、間欠動作モードに移行する。この動作を計測時間終了するまで、繰り返して行う。そして計測時間終了後には、ひずみレベル毎にそのレベルのひずみ振幅が何回起こったか、すなわち頻度データをワイヤレスで送信する。
【0043】
このとき、間欠動作モードでのセンシング休止時間と、CPUを連続動作モードとするためのひずみセンサ計測値の変化量の値をどのように設定するか、が正確な測定を行う上で重要となる。本発明においては、間欠動作モードのセンシング休止時間を0.1 秒以上と長めに設定して、消費電力の低減を図っている。センシング休止時間を長くすることにより、ひずみが大きくなってから連続動作モードに移行するまでの時間が長くなるが、前述したように大型構造物や建築物では大きなひずみ変化が起きる前には前兆として秒オーダーでひずみの上昇が起きるため、0.1 秒以上の時間間隔で前兆のひずみ上昇を検知してゆっくりと連続動作モードに移行しても、大きなひずみを逃さずに測定できるからである。連続動作モードに移行するための閾値は、この大きなひずみの前兆のひずみ上昇を検出するような値に設定することが望ましい。また、ピーク値が閾値付近のひずみは、連続動作モードに移行せずに検出できないこともあるが、ひずみ検出においては、構造物等の寿命に影響を与える大きなひずみを検出することが重要であり、比較的小さなひずみの検出を逃しても、ひずみ測定データの評価に与える影響は小さい。なお、ひずみ上昇が秒オーダーで起きることを考慮すると、センシング休止時間の上限は、10秒にすることが望ましい。
【0044】
また、本実施例では、連続動作モードとするためのトリガを、ひずみ計測値の変化量としたが、これをひずみセンサの絶対値とすると、半導体チップからなるひずみセンサでは大きな問題が発生する。周囲温度が変化するとひずみセンサがシリコン等の半導体チップであるために被測定物との間に大きな熱応力が発生し、見かけ上の無ひずみ点がシフトしてしまい、ひずみが生じていないのに大きなひずみ値がひずみ測定値にかかったままの状態になってしまうからである。よってひずみセンサの絶対値をしきい値とした場合には、トリガがかからない、もしくは連続モードで動作し続けるという誤動作が発生する。本実施例ではひずみの変化量を判断基準としていることから、無ひずみ点がシフトした場合でも、大きなひずみ振幅の計測を正しく行うことが出来る。
【0045】
さらに本実施例では連続計測モードとするためのトリガを、ひずみ計測値の変化量としているため、間欠動作の最中に、最大値がしきい値をわずかに上回る様な、小さなひずみ振幅が生じ、これを検出出来なかったとしても、小さなひずみ振幅が短時間作用するだけなので寿命評価には大きな影響を与えないため、精度低下にはつながらないという利点がある。また、急激なひずみ変化には敏感に反応するため、大きなひずみは連続動作モードで精度良く検出することができる。すなわち、本実施例によれば、間欠動作によるバッテリの節約と測定精度の維持を両立させることが出来るという利点が生じる。
【0046】
また、本実施例によれば、測定精度を落とすことなく間欠動作が可能となるので、バッテリの消耗を防止することが出来、長時間バッテリを取り替えずに計測できるという利点が生まれる。
【0047】
なお、この実施例は、図1に示す実施例1のひずみセンサを用いても、図2に示す従来のひずみセンサを用いても実施が可能である。
【0048】
また、本実施例では計測時間終了後の頻度データの送り方は、以下のように行う。
【0049】
本発明におけるシステムでは、一定時間計測した後、計測期間内の測定データをワイヤレスで電送する機能を有する。しかしながら、電送はそれ自体、非常にバッテリを消費する行為であるため、この低消費電力化はバッテリ寿命に大きく影響を及ぼす。そこで本実施例においては、送信するデータをできるだけ小さくすることで送信時間を短縮し、送信に必要な電力量を少なくした。すなわち、図17に示すように計測終了時には、頻度データがセンサモジュール内のメモリに蓄えられた状態にあるが、そのうち一番大きなひずみレベルを示すものを探し出し、それと同等およびそれ以下のひずみレベルのもののみを送信し、それ以上のひずみレベルのものは送信しないようにする。本実施例によれば、送信に必要なエネルギを節約できるため、バッテリの取り替え回数を低減することが可能となる。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図2】従来例の構成を説明したブロック図である。
【図3】従来技術の技術課題を説明した図である。
【図4】本発明の力学量測定システムの実装例を示す模式図である。
【図5】本発明の力学量測定システムの実装例を示す模式図である。
【図6】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図7】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図8】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図9】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図10】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図11】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図12】本発明の力学量測定システムの実装例を示す模式図である。
【図13】本発明の力学量測定システムの実装例を示す模式図である。
【図14】従来例の構成を説明したブロック図である。
【図15】本発明の力学量測定システムの構成を示すブロック図である。
【図16】本発明の力学量測定システムの動作を示すフロー図である。
【符号の説明】
【0051】
1…バッテリ、2…ひずみセンサ、3…アンプ、4…フィルタ、5…整流・平滑化部、6…A/D変換部、7…データ処理部、8,9…送受信部、10…異常診断部、11…
FFT解析部、12…スイッチ、13…センサモジュール、14…受信機、15…半導体チップ、16…パッド、17…CPU、18…ひずみ頻度解析部、19…寿命評価部、
20…被測定物、21…容器、22…重量物質、23…バネ様物質、24…取り付け部、25…振動検知装置、26…ローパスフィルタ。
【技術分野】
【0001】
本発明は、センサで得た情報を伝送して、力学量の計測を行うシステムに関する。
【背景技術】
【0002】
従来、構造物の寿命評価や異常診断のために動ひずみの計測が行われてきた。橋桁等の構造物では、測定者の容易に近付けない場所での計測も必要となることから、ひずみセンサと送信機から構成されるセンサモジュールを被測定物に取り付け、測定者の近くに受信機と解析装置を置いて、ワイヤレスで測定されることも多い。また、モータやエンジンで駆動して移動する装置などに取り付けて、離れたところから異常監視を行うことも行われている。
【0003】
【特許文献1】特開2005−114443号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
これらの場合には被測定物近傍に適当な電源線が無く、ひずみセンサと送信機はバッテリで駆動することが多い。動ひずみを測定する場合にはセンサモジュール内のCPU等の制御部や通信部を絶えず動作させる必要があり、バッテリの消耗が激しいという問題があった。例えば、ゆっくりしたひずみの変化を計測するためには、計測の制御装置や通信部等を間欠動作させることによって、バッテリの消耗を防止することができる。しかしながら、比較的速い周期的なひずみの変化や不定期に起こる現象を計測する場合には、ひずみのピーク値を取り逃がさないように、計測の制御装置や通信部等を常に動作させる必要があるためにバッテリの消耗が激しくなる。よってバッテリの取り替えを頻繁に行わなければならない等の問題がある。また同様に、従来はセンサモジュールの消費電力が大きいため、太陽電池等の微小容量電源での駆動が不可能であった。
【0005】
よって動ひずみをワイヤレスで測定する場合でも、低消費電力で動作し、バッテリの取り替えの頻度が低いシステムが望まれている。
【0006】
よって本発明は、前記課題の何れかを抑制することができる動ひずみ計測システムを提供する。特に振動等、周期的で比較的速いひずみ振幅を取得するのに、低消費電力でバッテリの取り替え頻度が低く、太陽電池等の微小容量電源での駆動も可能である動ひずみ計測システムを提供する。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、センサモジュール内にひずみセンサからの出力をフィルタリングするバンドパスもしくはハイパスフィルタを設け、さらに該フィルタからの出力を整流し、平滑化する回路を設け、この平滑化された値を送信機で送信する。これによって、ひずみセンサで得た周期的な動ひずみのうち、特定の周波数帯域、もしくは特定の周波数以上の帯域のみを取り出し、これを整流,平滑化することで、その周波数帯域の振幅の大きさのみを取り出すことができる。ある周波数帯域における周期的な動ひずみを計測する場合には、該動ひずみの振幅に比例した一定の直流電圧が得られるため、センサモジュールが間欠的にセンシングや通信を行った場合でも、精度の高い計測が可能となる。よって間欠通信が可能となるために、バッテリの取り替え頻度を極端に短くすることや、太陽電池等の微小容量電源での駆動が可能となった。なお、以下では力学量センサの代表例であるひずみセンサについて主に説明する。
【発明の効果】
【0008】
本発明により、送受信部が送信する計測データを少なくすることができ、電力消費量が特に大きい送受信部の消費量を低減することができる。また、測定に用いるCPU等の消費電力を低減させることができる。これによって、バッテリ消費量を低減し、バッテリ充電や交換回数の低減をする、または、バッテリを小型化してセンサチップを有する力学量測定装置を小型化することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【実施例1】
【0010】
図1に本発明における動ひずみ計測システムを示す。本実施例では、ほぼ周期的なひずみ変動を持つ構造物や機器に、該計測システムを取り付ける。該システムは、図1に示すように、センサモジュール13に備えられたバッテリ1,ひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5,A/D変換部6,データ処理部7,送受信部8,受信機
14に備えられた送受信部9,異常診断部10から構成されている。本システムは、その計測仕様等によって、若干はその構成が変更されることがあるが、その場合でも、ひずみセンサ2,フィルタ4,整流・平滑化部5,データ処理部7,送受信部8は必要である。ひずみセンサ2は、従来からひずみゲージとして知られる、フィルム上に薄膜の細線が形成されたものや、圧電素子を用いたものでもよいが、シリコンチップ上にひずみセンサが形成されたものであれば、耐ノイズ性,感度,消費電力低減の観点から最も良い。また、フィルタ4はバンドパスフィルタが望ましいが、用途によっては低周波成分のみをカットするハイパスフィルタでも良い。また、フィルタ4を構成する素子のうち、その幾つかはシリコンチップ外に外付け部品として取り付けられても良い。
【0011】
被測定物のひずみは、比測定物の表面や内部に設けられた該ひずみセンサ2によって電気的信号としてセンシングされる。該センシングデータはアンプ3で増幅された後、フィルタ4によって特定周波数領域の信号だけ取り出される。さらに整流・平滑化部5によって、該動ひずみの振幅に比例した一定の直流電圧を得る。この値をA/D変換部6によってデジタル化し、このデジタル値をデータ処理部7と送受信部8で間欠的に送信する。なお、A/D変換部6とデータ処理部7は、市販の1チップCPUを用いても良く、その場合には消費電力をより小さく出来るという利点が生じる。
【0012】
ここで、本発明との比較を行うために、図2を用いて従来のシステムの詳細を説明する。従来は、ひずみセンサ2からの出力はアンプ3を通してA/D変換部6に入力され、
CPU等のデータ処理部7と受送信部8の連携によりほぼ連続的に動作していた。すなわち、比較的高周波の動ひずみを計測する場合には、ほぼ常時、CPU等のデータ処理部7を動作させて、細かい波形全体の計測を行わないと高精度な測定は不可能となる。例えば、図3に示すように周期的な高周波ひずみ振幅を計測しようとする場合において、間欠的なセンシングを行うと、ピーク位置がセンシング出来ない場合があるため、正確にひずみ振幅を求めることが出来ない。そこでひずみの変化を正確にトレースするようにセンシングする必要があり、そのためにはひずみセンサ2とCPU等のA/D変換部6やデータ処理部7をほぼ常時動かして、ひずみ波形を詳細に取得することが必須となる。このようにCPU等のA/D変換部6やデータ処理部7やひずみセンサ2を常時動かすためにバッテリの消耗が早く、バッテリの早期交換を余儀なくされてきた。さらに常時センシングしたデータはセンサモジュール13内で蓄積、もしくは処理しようとしても限界があるために、外部に頻繁に送信し、受信機14内でFFT(Fast Fourier Transform)解析部11によって周波数分析を行う必要がある。このように、通信を頻繁に行うことによってさらにバッテリの消耗が早くなり、バッテリの早期交換を余儀なくされてきた。
【0013】
よって従来のシステムでは、高精度な計測と低消費電力なセンシングを両立させることが難しかった。
【0014】
これに対して本実施例では、フィルタ4と整流・平滑化部5によって、ひずみ振幅に比例した直流信号に変換できるので、ある短時間だけCPU等のA/D変換部6やデータ処理部7を動かすだけで、ひずみ振幅の値を直流値として得ることが出来る。よって、ひずみ振幅の測定精度はCPU等のA/D変換部6のサンプリング周期の影響を受け難く、間欠的にセンシングを行った場合においても高精度にひずみ振幅の情報を得ることが可能となる。すなわち従来のようにひずみ値の時々刻々の変化をすべてセンシングして、その膨大なデータを送信するのではなく、本実施例ではひずみ振幅の値のみをCPU等のA/D変換部6やデータ処理部7で間欠的に扱ってRAM等の記憶手段(図示せず)に記録し、記憶手段に蓄えたデータを送受信部8で間欠的に通信できるので、データ処理や通信に必要なエネルギも少なくて済むという利点がある。すなわち、従来と比較して、CPUや通信部で取り扱う情報量が非常に小さくなるので、結果的にセンサモジュールの消費電力を非常に小さく出来、バッテリの長寿命化を可能とすることができる。さらに、ひずみセンサ2の直後でフィルタリング処理や整流・平滑化処理をしているために、ノイズに強いという利点も生じる。さらに本実施例では、FFT解析を受信側で行う必要が無いので、受信機14もコンパクトに出来るという利点が生じる。
【0015】
なお本実施例では、送受信はワイヤレスで行っているが、有線で送受信をおこなっても、ノイズに強いという利点がある。また、バッテリのような電力供給手段としては、電池,充電電池,キャパシタ,コンデンサ等内部に電力を蓄えるものがあり、太陽光や振動で発電する発電手段を設けてもよい。いずれでも、消費電力低減による電力供給手段の長寿命化やコンパクト化の効果がある。
【0016】
図4には、本システムの実装形態を示す。被測定物20表面近傍にひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍にアンプ3,フィルタ4,整流・平滑化部5,A/D変換部6,データ処理部7,送受信部8,バッテリ1を有し、これらを容器21が覆っている。被測定物20に発生するひずみが大きい場合にはこのような実装方法が望ましい。本実施例によれば、センサモジュール13の消費電流が小さくできるため、バッテリ1も小型で済み、全体的に場所を取らないで設置できるという利点が生じる。ひずみの変化の最も大きい場所は角部等の応力集中箇所であることが多く、システムが小型に出来るため、角部等の狭い場所にも設置することができるという利点が生じる。
【実施例2】
【0017】
さらに図5には微小振動を計測するのに適したシステムの実装形態を示す。本実施例では、被測定物20の振動を計測するために、被測定物20に接触して、取り付け部24が接着,接合,埋め込み、の何れかの手法で設けられており、バネ様物質23にその振動が伝達される。バネ様物質は、例えばつる巻き状のバネ,板バネや弾性物質等であり、被測定物20や半導体チップ15よりもバネ剛性の低い物体である。バネ様物質23では、バネ様物質23より密度の大きい重量物質22に接続されていることから、重量物質22の慣性力が働くために、振動が大きなひずみに変換される。バネ様物質23表面近傍にはひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、バネ様物質23のひずみの変化を捉えることで振動を検知する。本実施例によれば、微小振動を大きな振動に変換してからひずみセンサ2で検出し、センサモジュール13の消費電流が小さくできるため、バッテリ1も小型で済み、全体的に場所を取らないで設置できるという利点が生じる。
【0018】
被測定物20として、モータやエンジンを具備した装置を考えると、そのモータやエンジンに固有の振動周波数をセンシングできるようにフィルタ4の遮断周波数や中心周波数を決定しておくことにより、モータやエンジンの異常検知が可能になるという利点がある。すなわち、モータやエンジンの異常時には、発生する振動周波数が変化することから、本システムにおいて計測するひずみ振幅の値が変化するため、本システムのセンシングデータを受信することで、異常を検知することが可能となる。従来では加速度計やひずみセンサからの信号をワイヤレス電送した後に、FFT解析等により分析するという複雑な処理が必要であったが、本システムを用いれば簡単な処理で済むため低消費電力で小型なシステムを実現できるという利点が生じる。
【0019】
なお、図4と図5においては、各回路要素2〜8を積み上げるようにして実装する場合を示したが、1つのボードに実装しても良いし、各要素が接続されていれば良い。
【実施例3】
【0020】
<複数フィルタ>
図6には、フィルタ4a,4bを複数設けた実施例を示す。本実施例では、フィルタの遮断周波数や中心周波数を変えたフィルタ4a,4bを複数設けてあり、フィルタ4aの出力を整流・平滑化手段5aが整流・平滑化し、フィルタ4bの出力を整流・平滑化手段5bが整流・平滑化する。本実施例によれば、各種の周波数ひずみ変動が混在したセンシングデータから、特定の周波数帯域のひずみ変動を取り出して、そのひずみ振幅を直流信号で得られ、かつその周波数を変えた場合のひずみ振幅の値を送信することができる。すなわち、実施例1のCPUや通信部で取り扱う情報量が非常に小さくなるので、結果的にセンサモジュールの消費電力を非常に小さく出来、バッテリの長寿命化を可能とすることができるという利点を備え、かつ複数の周波数域のひずみ振幅を測定して、より複雑で高精度な測定を行うことができるという利点を本実施例では有する。
【実施例4】
【0021】
なお、図7に示すように、フィルタ4の遮断周波数や中心周波数をスイッチで切り替えられるようにして、単一のフィルタ4で複数の周波数域の振動を取り出すようにしても良い。具体的にはフィルタ4を構成する抵抗(図示せず)の値やコンデンサ(図示せず)の容量をスイッチ12で切り替えても良い。この場合にはフィルタ4が1つで済むので、消費電力が低減できるという利点,装置を小型化できるという利点、予め固有振動数等の測定したい周波数がいくつか決まっている場合に、柔軟にその周波数だけ選択して測定することが出来、他の周波数領域まで測定しなくても良い分、エネルギ消費量を減少させることが出来るという利点等が生じる。また、一つのフィルタ4で、多くの周波数帯域を測定することができるので、木目細やかな測定を行うことができる。
【0022】
フィルタ4が測定を行う周波数は、あらかじめセンサモジュール13内のROMやRAM等に記憶された周波数帯域に従って順番に切り替えても良い。この場合、ある周波数帯域を所定の時間,ひずみ測定を行った後、周波数域を変更し、別の周波数域のひずみ測定を行う。また、受信機14を操作し、受信機14からセンサモジュール13に指令を送信してフィルタ4の周波数域を変更しても良い。
【実施例5】
【0023】
図8には、半導体チップ15上にひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5を形成した実施例を示す。ひずみの変化をひずみセンサ2で計測し、アンプ3で増幅し、その値をフィルタ4においてフィルタリングし、これを整流・平滑化部5で直流化した後にパッド16に出力する。フィルタ4はバンドパスフィルタでも良いし、ハイパスフィルタでも良い。また、フィルタ4の後段にアンプ(図示せず)を設けても良いし、整流・平滑下部5の後段にアンプを設けても良い。システムの用途と入力されるひずみ信号レベルに応じて、アンプは必要な箇所に設けられるのが望ましい。
【0024】
フィルタ4がバンドパスフィルタである場合には、その周波数帯域の信号のみを取り出すことが出来ることから、固有振動数等の測定したい振動数が明確である場合に非常に有効である。測定したい振動数のひずみ振幅の増減で、異常検知が可能である。また、ハイパスフィルタである場合には、明確な振動数は決まっていないが、異常時に高周波振動が増えることが明らかになっているモータやエンジン等の場合に適し、高周波振動の増減で機器の状態を把握するのに好適である。
【0025】
本実施例におけるひずみセンサ2としては、半導体基板表面に局所的に不純物拡散層を設けたものを用いる。これによって半導体基板上にトランジスタやダイオード等の素子と該ひずみセンサを混載でき、ほぼ同じ製造プロセスで作成できることから、高感度,低消費電力とノイズ耐性を両立させることができる。すなわち、微小な高周波ひずみを検知したい場合に、高感度なひずみセンサ2で微小なひずみの変化を検知し、同じ半導体基板上でアンプ3を用いてノイズが最小になるように信号を増幅し、同じ半導体基板上のフィルタ4で目的となる周波数帯域の信号だけ選別できる。ひずみセンサ2とアンプ3が別チップになっている場合には、ここでノイズが入りやすく、フィルタ4でフィルタリングしてもノイズを拾うことになりかねない。また、アンプ3とフィルタ4が別チップになっている場合、およびフィルタ4と整流・平滑化部5が別チップになっている場合のいずれかでも、実際上前段のアンプ3の倍率を高く出来ないことから、ノイズが混入しやすく高精度な計測が実現出来ない。すなわち、ひずみセンサ2、アンプ3,フィルタ4,整流・平滑化部5までの回路を1つの半導体基板上に構成して半導体チップ15とすることではじめて、微小なひずみ変化を計測する場合においても十分なノイズ耐性を有し、高精度な動ひずみ計測が可能なシステムとすることが出来る。
【0026】
本チップを用いることにより、基板ボード上に各種の電子パーツを混載してはんだ付けした場合に比べて、各種の利点が生じる。本実施例では、半導体基板から構成される半導体チップ15上に各種の電子回路と微小なひずみセンサを形成しているので、外部ノイズの混入が少なく、耐ノイズ性に優れるという利点がある。よって、微小なひずみ信号でも高精度に測定が可能であり、高精度な動ひずみ計測や異常診断が可能となる。また、回路を形成する各素子が低消費電力で動作するので、全体としてセンサモジュール13の消費電力を低減することが出来、さらにバッテリの消耗を抑えることが出来るという利点がある。さらに、1チップ化することで小型化が図れることから、応力集中場等の微小部のひずみ計測にも適用できるようになるという利点も生じる。
【0027】
なお、比較的低周波領域を遮断周波数とするフィルタを用いる場合には、半導体チップ15に外付けするコンデンサや抵抗が必要になる場合もあるが、その場でも上記と同様な利点がある。
【0028】
図9には、半導体チップ15上に複数チャンネルのフィルタ4を設けた例を示したものである。この場合にはフィルタ4の遮断周波数や中心周波数をそれぞれ異なるものに設定し、フィルタリングした各出力は異なるパッド16から出力される。本発明の実施例1のフィルタを複数設けた場合と同様な利点がある。さらに本実施例では、1チップに全ての回路を形成しているので、複数チャンネル設けても消費電力の増加が抑えられるという利点がある。さらに複数チャンネル設けても、装置が大型化することがないという利点がある。また、チャンネル数を多数設けることで、半導体チップ15上でFFT解析と同様な機能を持たせることが可能となる。すなわち、周波数ごとの振動強度やひずみ強度を半導体チップ15上の複数のパッド16からそれぞれ出力することが可能となる。この出力を別に設けたA/D変換部6,データ処理部7,送受信部8に接続することで、チャネル毎の振動強度やひずみ強度を送信することが出来る。これにより実際のひずみ波形をそのまま高速に送信する場合と比較してデータの情報量を少なくすることが出来、通信に要するエネルギを小さくすることが可能である。また、受信側でFFT処理を行わなくても良いために、受信側の装置が、例えば低速CPUを用いた携帯端末等の限られたデータ処理機能を持つものでもよいという利点も生じる。
【0029】
図10には、フィルタ4は1種類であるが、スイッチを用いてその遮断周波数もしくは中心周波数を変更できる機能を持った半導体チップ15を示す。具体的にはフィルタ4に付随するコンデンサ容量や抵抗をスイッチで切り替える、もしくは可変にすることで、任意の周波数を選択し、そのひずみ強度や振動強度を計測するものである。本方法は、図8に示した実施例に比べて回路が簡単になる、より低消費電力で動作させることができるというメリットがある。
【0030】
図11は半導体チップ15上にひずみセンサ2,アンプ3,フィルタ4,整流・平滑化部5,CPU17を形成した実施例を示す。図8に示した実施例の利点に加え、さらに低消費電力化が図れるというメリットがある。すなわち、図8に示した実施例では、整流・平滑化部5からA/D変換部6の間にアンプが必要な場合が多かったが、図11に示すシステムでは半導体チップ15上に全て混載できることから、アンプの数を減らすことが出来、その分だけ消費電力を低減することが出来る。
【0031】
図12には本システムの実装形態を示す。被測定物20表面近傍に半導体チップ15が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍に半導体チップ15,A/D変換部6,データ処理部7,送受信部8,バッテリ1を有し、これらを容器21が覆っている。図4で説明した事項と同様な利点があるが、さらに半導体チップ
15を用いたことでコンパクト,低消費電力となるというメリットが生じる。さらに図
13には微小振動を計測するのに適した実装形態を示す。これも図5で説明したのと同様なメリットがあるが、さらに半導体チップ15を用いたことでコンパクト,低消費電力となるというメリットが生じる。
【0032】
なお、図12と図13においては、各回路要素を積み上げるようにして実装する場合を示したが、半導体チップ15以外は1つのボードに実装しても良いし、各要素が接続されていれば良い。半導体チップ15はひずみを測定する箇所であるので、他の部材から拘束されることのないように配置するのが望ましい。
【実施例6】
【0033】
以下では、0.1Hz から10Hz程度の中程度の変化速度を持つ動ひずみを計測し、その計測値から寿命評価を行うという用途についての実施例を示す。図14にシステム構成を示す。図4または図5に示すものと同様に、被測定物20表面近傍にひずみセンサ2が接着,接合、もしくは埋め込みの何れかの方法で設けられており、その近傍にアンプ3,A/D変換部6,ひずみ頻度解析部18,送受信部8,バッテリ1を有し、容器21がこれらを覆っている。通常、被測定物20のひずみをひずみセンサ2で計測し、アンプ3でこれを増幅し、さらにA/D変換部6でデジタルデータに変換する。そして一定時間内に観察されたひずみ振幅を、その大きさに応じて分類し、頻度分布としてひずみ頻度解析部18にてカウントする。この、ひずみレベルと頻度分布の組み合わせを、送受信部8から送信する。A/D変換部6,ひずみ頻度解析部18はCPUとして1つのデバイスであることが望ましい。
【0034】
このような寿命評価を行うためのシステム自体は、例えば特開2002−357487号公報に記載されているように、バッテリ消費量の低減が課題となっている。すなわち、このような中速の動ひずみを計測して、頻度分布を得るには、A/D変換部やCPUを常時動かしておく必要があり、そのためにバッテリ1の消耗が激しいという問題があった。
【0035】
さらに該システムは中程度の変化速度を持つひずみを専用で計測するシステムであったが、該システムで計測できない高速の動ひずみ変化によって構造物の異常が見つかる実例も出てきている。すなわち、高周波の範囲のひずみ変化と中程度のひずみ変化を持つ場合の両者を計測する必要が出てきた。
【0036】
図15には、この課題を解決した本発明の実施例を示す。ひずみセンサ2からの出力はアンプ3で増幅され、一方はフィルタ4を通り、整流・平滑化部5に接続される。他のアンプ3からの出力は、ローパスフィルタ26を通り、そのままA/D変換部6に接続される。また、用途によってはローパスフィルタ26が不要である場合もある。フィルタ4はバンドパスフィルタかハイパスフィルタが望ましい。本実施例によれば、高周波の範囲のひずみ変化は、フィルタ4により取り出し、整流・平滑化部5によって直流化してからA/D変換してデータ処理部7で間欠的に計測することができる一方で、低速度から中速度域のひずみ変化に対するひずみ計測は、比較的測定頻度が少なくて済むので、測定波形を整流・平滑化部5で直流化せずに直接A/D変換してデータ処理部7でほぼ連続的にデータ処理を行うことが出来る。すなわち、従来の方法では、高周波の範囲のひずみ変化と低から中速程度のひずみ変化を持つ場合の両者を計測する場合には、両者とも連続してCPUを動かしてセンシングを行う必要があるために、1つのCPUで同時に測定することは困難であった。すなわち、1つのCPUは中速程度のひずみ変化を計測して、ひずみ振幅のレベルに分類しながらカウントすることを連続して行い、また他のCPUは、高速の動ひずみを、その波形を忠実に計測するために連続して計測動作する必要があった。しかしながら本実施例では、間欠的に高速の動ひずみを計測することが可能なため、独立した2つのCPUが無くても計測できることから、その分だけバッテリの消耗が少なく、小型のシステムを実現できるという利点がある。また、1つのセンサを被測定物に設置するだけでよいので作業性や信頼性が格段に向上するという利点がある。なお、図15ではひずみセンサ2は1つであるが、高速用と低・中速用の2つのセンサを設けても良い。
【実施例7】
【0037】
構造物の寿命評価を行う目的で、低中速の動ひずみを計測して頻度分布をカウントするワイヤレス通信モジュールにおいては、A/D変換部やCPUを常時動かしておく必要があり、そのためにバッテリ1の消耗が激しいという問題があった。
【0038】
通常、このようなシステムの消費電力低減のためには、モジュールの間欠動作を行うことが一般的に行われる。これはCPUに内蔵されたタイマやカウンタを利用して一定時間ごとにCPUのメイン回路やセンサ回路,アンプ回路等に電源を入れて計測を行い、計測終了後にはカウンタやタイマ等をセットして休止動作に入るものである。しかしながら、休止期間に大きなひずみ変動があると不正確な計測結果にならざるを得ないために、従来は構造物の寿命評価において間欠動作は採用されなかった。
【0039】
以下では、動ひずみを計測して寿命評価を行うシステムにおいて、間欠動作を取り入れることでバッテリの消費量を減少させるとともに、精度の高い計測が可能となる本発明の実施例を示す。
【0040】
我々は、鉄橋,橋脚等の大型構造物や建築物の動ひずみ計測を行った結果、全体の計測時間のうち、数百με以下のひずみの低い時間の割合が大部分であることを見つけた。また、大きなひずみが負荷される場合には、その前兆として秒オーダで事前にひずみ上昇の予兆が見られることがわかった。すなわち、橋脚等の大型構造物では車や鉄道車両が近づくために事前にひずみの上昇が見られることや、橋脚自体の固有振動数が小さいことから、大きなひずみ変化の予兆が秒オーダで事前に現れることがわかった。ここで、大型構造物とは、例えば、橋(鉄橋,コンクリート橋,橋脚等含む),大型建造物(ゲート,ビル,ダム,トンネル,堤防等含む)等のことである。
【0041】
本発明ではこの知見を利用し、ひずみが十分小さくて、それが維持される場合には、間欠動作を行って監視し、ひずみが上昇し始めたことを検知した時点で連続動作に移行することで、低消費電力と高精度計測とを両立させることに成功した。以下に詳細を示す。
【0042】
図16には本実施例におけるセンサモジュール13の動作フローを示す。まず、寿命を推定するために計測する期間(計測時間)をセンサモジュール13に入力し、さらに間欠動作モードでのセンシング休止時間と、CPUを連続動作モードとするためのひずみセンサ計測値の変化量をセンサモジュールに入力する。計測が開始されるとセンサモジュールは間欠的にセンシングを行い、センシング値の変化量が予め設定された変化値を超えた場合には連続動作モードに入ることを特徴とする。その後、連続的にセンシングを行ってひずみの波形を測定し、ピーク値やひずみ振幅の計測を行う。さらにこのひずみ振幅の値を幾つかのレベルに分けて、そのレベルでの回数をカウントする。そのカウント方法は、一般的にレインフロー法や応力レベルクロスカウント法と呼ばれるものと同様である。さらに、ある一定期間において計測値の変化量が予め設定された変化値を下回った場合には、間欠動作モードに移行する。この動作を計測時間終了するまで、繰り返して行う。そして計測時間終了後には、ひずみレベル毎にそのレベルのひずみ振幅が何回起こったか、すなわち頻度データをワイヤレスで送信する。
【0043】
このとき、間欠動作モードでのセンシング休止時間と、CPUを連続動作モードとするためのひずみセンサ計測値の変化量の値をどのように設定するか、が正確な測定を行う上で重要となる。本発明においては、間欠動作モードのセンシング休止時間を0.1 秒以上と長めに設定して、消費電力の低減を図っている。センシング休止時間を長くすることにより、ひずみが大きくなってから連続動作モードに移行するまでの時間が長くなるが、前述したように大型構造物や建築物では大きなひずみ変化が起きる前には前兆として秒オーダーでひずみの上昇が起きるため、0.1 秒以上の時間間隔で前兆のひずみ上昇を検知してゆっくりと連続動作モードに移行しても、大きなひずみを逃さずに測定できるからである。連続動作モードに移行するための閾値は、この大きなひずみの前兆のひずみ上昇を検出するような値に設定することが望ましい。また、ピーク値が閾値付近のひずみは、連続動作モードに移行せずに検出できないこともあるが、ひずみ検出においては、構造物等の寿命に影響を与える大きなひずみを検出することが重要であり、比較的小さなひずみの検出を逃しても、ひずみ測定データの評価に与える影響は小さい。なお、ひずみ上昇が秒オーダーで起きることを考慮すると、センシング休止時間の上限は、10秒にすることが望ましい。
【0044】
また、本実施例では、連続動作モードとするためのトリガを、ひずみ計測値の変化量としたが、これをひずみセンサの絶対値とすると、半導体チップからなるひずみセンサでは大きな問題が発生する。周囲温度が変化するとひずみセンサがシリコン等の半導体チップであるために被測定物との間に大きな熱応力が発生し、見かけ上の無ひずみ点がシフトしてしまい、ひずみが生じていないのに大きなひずみ値がひずみ測定値にかかったままの状態になってしまうからである。よってひずみセンサの絶対値をしきい値とした場合には、トリガがかからない、もしくは連続モードで動作し続けるという誤動作が発生する。本実施例ではひずみの変化量を判断基準としていることから、無ひずみ点がシフトした場合でも、大きなひずみ振幅の計測を正しく行うことが出来る。
【0045】
さらに本実施例では連続計測モードとするためのトリガを、ひずみ計測値の変化量としているため、間欠動作の最中に、最大値がしきい値をわずかに上回る様な、小さなひずみ振幅が生じ、これを検出出来なかったとしても、小さなひずみ振幅が短時間作用するだけなので寿命評価には大きな影響を与えないため、精度低下にはつながらないという利点がある。また、急激なひずみ変化には敏感に反応するため、大きなひずみは連続動作モードで精度良く検出することができる。すなわち、本実施例によれば、間欠動作によるバッテリの節約と測定精度の維持を両立させることが出来るという利点が生じる。
【0046】
また、本実施例によれば、測定精度を落とすことなく間欠動作が可能となるので、バッテリの消耗を防止することが出来、長時間バッテリを取り替えずに計測できるという利点が生まれる。
【0047】
なお、この実施例は、図1に示す実施例1のひずみセンサを用いても、図2に示す従来のひずみセンサを用いても実施が可能である。
【0048】
また、本実施例では計測時間終了後の頻度データの送り方は、以下のように行う。
【0049】
本発明におけるシステムでは、一定時間計測した後、計測期間内の測定データをワイヤレスで電送する機能を有する。しかしながら、電送はそれ自体、非常にバッテリを消費する行為であるため、この低消費電力化はバッテリ寿命に大きく影響を及ぼす。そこで本実施例においては、送信するデータをできるだけ小さくすることで送信時間を短縮し、送信に必要な電力量を少なくした。すなわち、図17に示すように計測終了時には、頻度データがセンサモジュール内のメモリに蓄えられた状態にあるが、そのうち一番大きなひずみレベルを示すものを探し出し、それと同等およびそれ以下のひずみレベルのもののみを送信し、それ以上のひずみレベルのものは送信しないようにする。本実施例によれば、送信に必要なエネルギを節約できるため、バッテリの取り替え回数を低減することが可能となる。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図2】従来例の構成を説明したブロック図である。
【図3】従来技術の技術課題を説明した図である。
【図4】本発明の力学量測定システムの実装例を示す模式図である。
【図5】本発明の力学量測定システムの実装例を示す模式図である。
【図6】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図7】本発明の一実施例である力学量測定システムの構成を示すブロック図である。
【図8】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図9】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図10】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図11】本発明の一実施例である半導体チップの回路構成を示すブロック図である。
【図12】本発明の力学量測定システムの実装例を示す模式図である。
【図13】本発明の力学量測定システムの実装例を示す模式図である。
【図14】従来例の構成を説明したブロック図である。
【図15】本発明の力学量測定システムの構成を示すブロック図である。
【図16】本発明の力学量測定システムの動作を示すフロー図である。
【符号の説明】
【0051】
1…バッテリ、2…ひずみセンサ、3…アンプ、4…フィルタ、5…整流・平滑化部、6…A/D変換部、7…データ処理部、8,9…送受信部、10…異常診断部、11…
FFT解析部、12…スイッチ、13…センサモジュール、14…受信機、15…半導体チップ、16…パッド、17…CPU、18…ひずみ頻度解析部、19…寿命評価部、
20…被測定物、21…容器、22…重量物質、23…バネ様物質、24…取り付け部、25…振動検知装置、26…ローパスフィルタ。
【特許請求の範囲】
【請求項1】
被測定物に設置して力学量を測定し、測定結果を送信する力学量測定装置において、
力学量を検出して信号を出力する力学量検出手段と、
前記信号から第一の特定周波数の信号を取り出す第一のフィルタリング手段と、
前記取り出された信号を整流・平滑化する第一の整流・平滑化手段と、
前記整流・平滑化された信号をデータ処理するデータ処理手段と、
前記データ処理された信号を送信する送信手段とを備えた力学量測定装置。
【請求項2】
請求項1において、
前記送信手段は、無線送信を行うことを特徴とする力学量測定装置。
【請求項3】
請求項1において、
前記力学量検出手段が出力した信号から、前記第一のフィルタ手段が取り出した信号と異なる第二の特定周波数の信号を取り出す第二のフィルタリング手段と、
該取り出された信号を整流・平滑化する第二の整流・平滑化手段と、
前記第一の整流・平滑化手段により整流・平滑化された信号及び前記第二の整流・平滑化手段により整流・平滑化された信号をデータ処理するデータ処理手段とを備えた力学量測定装置。
【請求項4】
請求項1において、
電力を蓄えまたは電力を発生させ、前記送信手段に電力を供給する電力供給手段をその内部に備えたことを特徴とする力学量測定装置。
【請求項5】
請求項1において、
前記力学量検出手段,フィルタリング手段,整流・平滑化手段,データ処理手段を単一の半導体基板上に備えたことを特徴とする力学量測定装置。
【請求項6】
請求項1において、
前記フィルタリング手段が取り出す特定周波数は、可変であることを特徴とする力学量測定装置。
【請求項7】
請求項1において、
前記データ処理手段を間欠的に動作させることを特徴とする力学量計測装置。
【請求項8】
請求項1において、
前記力学量検出手段は、半導体基板上に形成されており、
前記半導体基板よりもバネ剛性の小さな物体を介して、前記被測定物に接続されることを特徴とする力学量計測装置。
【請求項9】
請求項1において、
前記データ処理手段は、
前記整流・平滑化された信号と、
前記力学量検出手段から出力され、整流・平滑化手段により整流・平滑化されない信号とをデータ処理することを特徴とする力学量測定装置。
【請求項10】
請求項1において、
前記力学量検出手段が出力した信号から、前記第一のフィルタ手段が取り出した信号と異なる第三の特定周波数の信号を取り出す第三のフィルタリング手段と、
前記第三のフィルタリング手段が取り出した信号をデータ処理するデータ処理手段とを備えたことを特徴とする力学量測定装置。
【請求項11】
請求項1において、
前記データ処理手段は、力学量の大きさで分類して、力学量の大きさごとの頻度をカウントすることを特徴とする力学量測定。
【請求項12】
被測定物に設置して力学量を測定し、測定結果を送信する力学量測定方法において、
力学量をセンシングして信号を出力し、
前記信号から特定周波数を取り出し、
前記取り出された信号を整流・平滑化し、
前記整流・平滑化された信号をデータ処理し、
前記データ処理された信号を送信する力学量測定方法。
【請求項13】
請求項11において、
前記送信は、無線送信であることを特徴とする力学量測定方法。
【請求項14】
被測定物に設置してひずみを測定し、測定結果を送信する力学量測定方法において、
第一の測定モードと、
前記第一の測定モードよりも測定頻度が多い第二の測定モードを有し、
前記第一の測定モードで測定したひずみ測定値の変化量が所定の値よりも大きいときに、前記第二の測定モードで測定を行うことを特徴とする力学量測定方法。
【請求項15】
大型構造物または建築物のひずみを測定し、測定結果を送信する力学量測定方法において、
測定の時間間隔が0.1 秒以上である第一の測定モードと、
前記第一の測定モードよりも測定頻度の多い第二の測定モードを有し、
前記第一の測定モードで測定した測定値の大きさに応じて、前記第二の測定モードで測定へ切り替えることを特徴とする力学量測定方法。
【請求項16】
請求項15において、
前記第一の測定モードで測定したひずみ測定値の変化量が所定の値よりも大きいときに、前記第二の測定モードで測定を行うことを特徴とする力学量測定装置。
【請求項17】
被測定物に設置してひずみを測定し、測定結果を送信する力学量測定方法において、
ひずみを測定し、
測定されたひずみの大きさごとの頻度をカウントし、
前記測定されたひずみのうち、大きさ最大のひずみ及びそれ以下の大きさひずみの頻度を送信し、前記最大のひずみより大きいひずみの頻度を送信しないことを特徴とする力学量測定方法。
【請求項1】
被測定物に設置して力学量を測定し、測定結果を送信する力学量測定装置において、
力学量を検出して信号を出力する力学量検出手段と、
前記信号から第一の特定周波数の信号を取り出す第一のフィルタリング手段と、
前記取り出された信号を整流・平滑化する第一の整流・平滑化手段と、
前記整流・平滑化された信号をデータ処理するデータ処理手段と、
前記データ処理された信号を送信する送信手段とを備えた力学量測定装置。
【請求項2】
請求項1において、
前記送信手段は、無線送信を行うことを特徴とする力学量測定装置。
【請求項3】
請求項1において、
前記力学量検出手段が出力した信号から、前記第一のフィルタ手段が取り出した信号と異なる第二の特定周波数の信号を取り出す第二のフィルタリング手段と、
該取り出された信号を整流・平滑化する第二の整流・平滑化手段と、
前記第一の整流・平滑化手段により整流・平滑化された信号及び前記第二の整流・平滑化手段により整流・平滑化された信号をデータ処理するデータ処理手段とを備えた力学量測定装置。
【請求項4】
請求項1において、
電力を蓄えまたは電力を発生させ、前記送信手段に電力を供給する電力供給手段をその内部に備えたことを特徴とする力学量測定装置。
【請求項5】
請求項1において、
前記力学量検出手段,フィルタリング手段,整流・平滑化手段,データ処理手段を単一の半導体基板上に備えたことを特徴とする力学量測定装置。
【請求項6】
請求項1において、
前記フィルタリング手段が取り出す特定周波数は、可変であることを特徴とする力学量測定装置。
【請求項7】
請求項1において、
前記データ処理手段を間欠的に動作させることを特徴とする力学量計測装置。
【請求項8】
請求項1において、
前記力学量検出手段は、半導体基板上に形成されており、
前記半導体基板よりもバネ剛性の小さな物体を介して、前記被測定物に接続されることを特徴とする力学量計測装置。
【請求項9】
請求項1において、
前記データ処理手段は、
前記整流・平滑化された信号と、
前記力学量検出手段から出力され、整流・平滑化手段により整流・平滑化されない信号とをデータ処理することを特徴とする力学量測定装置。
【請求項10】
請求項1において、
前記力学量検出手段が出力した信号から、前記第一のフィルタ手段が取り出した信号と異なる第三の特定周波数の信号を取り出す第三のフィルタリング手段と、
前記第三のフィルタリング手段が取り出した信号をデータ処理するデータ処理手段とを備えたことを特徴とする力学量測定装置。
【請求項11】
請求項1において、
前記データ処理手段は、力学量の大きさで分類して、力学量の大きさごとの頻度をカウントすることを特徴とする力学量測定。
【請求項12】
被測定物に設置して力学量を測定し、測定結果を送信する力学量測定方法において、
力学量をセンシングして信号を出力し、
前記信号から特定周波数を取り出し、
前記取り出された信号を整流・平滑化し、
前記整流・平滑化された信号をデータ処理し、
前記データ処理された信号を送信する力学量測定方法。
【請求項13】
請求項11において、
前記送信は、無線送信であることを特徴とする力学量測定方法。
【請求項14】
被測定物に設置してひずみを測定し、測定結果を送信する力学量測定方法において、
第一の測定モードと、
前記第一の測定モードよりも測定頻度が多い第二の測定モードを有し、
前記第一の測定モードで測定したひずみ測定値の変化量が所定の値よりも大きいときに、前記第二の測定モードで測定を行うことを特徴とする力学量測定方法。
【請求項15】
大型構造物または建築物のひずみを測定し、測定結果を送信する力学量測定方法において、
測定の時間間隔が0.1 秒以上である第一の測定モードと、
前記第一の測定モードよりも測定頻度の多い第二の測定モードを有し、
前記第一の測定モードで測定した測定値の大きさに応じて、前記第二の測定モードで測定へ切り替えることを特徴とする力学量測定方法。
【請求項16】
請求項15において、
前記第一の測定モードで測定したひずみ測定値の変化量が所定の値よりも大きいときに、前記第二の測定モードで測定を行うことを特徴とする力学量測定装置。
【請求項17】
被測定物に設置してひずみを測定し、測定結果を送信する力学量測定方法において、
ひずみを測定し、
測定されたひずみの大きさごとの頻度をカウントし、
前記測定されたひずみのうち、大きさ最大のひずみ及びそれ以下の大きさひずみの頻度を送信し、前記最大のひずみより大きいひずみの頻度を送信しないことを特徴とする力学量測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−241583(P2007−241583A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2006−61978(P2006−61978)
【出願日】平成18年3月8日(2006.3.8)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成18年3月8日(2006.3.8)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]