
力算出システム
【課題】小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出すること。
【解決手段】本発明の力算出システム100は、所定の圧力で空気を送り出す空気送出部1と、空気送出部1から送り出された空気のための流路2と、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる受感部4と、流路2を流れる空気の流量を計測する流量計3と、受感部4が受ける外力の大きさ、および、空気送出部1から送出された空気が流路を流れる流量の対応関係を示す流量・力対応関係情報531を予め記憶する記憶部53と、流量計3が計測した流路2を流れる空気の流量、および、記憶部53に記憶された流量・力対応関係情報531に基づいて、受感部4が受けている外力の大きさを算出する処理部52と、を備える。
【解決手段】本発明の力算出システム100は、所定の圧力で空気を送り出す空気送出部1と、空気送出部1から送り出された空気のための流路2と、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる受感部4と、流路2を流れる空気の流量を計測する流量計3と、受感部4が受ける外力の大きさ、および、空気送出部1から送出された空気が流路を流れる流量の対応関係を示す流量・力対応関係情報531を予め記憶する記憶部53と、流量計3が計測した流路2を流れる空気の流量、および、記憶部53に記憶された流量・力対応関係情報531に基づいて、受感部4が受けている外力の大きさを算出する処理部52と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する技術に関する。
【背景技術】
【0002】
従来から、力を計測する技術として、電気抵抗の変化を利用したひずみゲージ(以下、「電気式ひずみセンサ」と称する。)や、受感部に圧電素子を搭載したロードセルが広く使用されている。しかし、これらは電気的な物理現象を利用したセンサであるため、MRI(Magnetic Resonance Imaging)装置などの強い電磁環境下では使用できない。また、他の電気的なデバイスと干渉し、計測の精度が悪化するという問題も起こりうる。
【0003】
そこで、光ファイバ式のひずみゲージ(以下、「光ファイバ式センサ」と称する。)が実用化されている(非特許文献1、2参照)。この技術によれば、受感部のひずみによる光の波長、周波数、位相、透過量などの変化を検出するため、前記のような電気的要素に起因する問題は起こらない。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】J. Peirs, et al., “A micro optical force sensor for force feedback during minimally invasive robotic surgery”, Sensors and Actuators A 115 (2004), pp.447-455.
【非特許文献2】P. Polygerinos, et al., “A Fibre-Optic Catheter-Tip Force Sensor with MRI Compatibility: A Feasibility Study”, 31st Annual International Conference of the IEEE EMBS Minneapolis, Minnesota, USA, September 2-6, 2009, pp.1501-1504.
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、光ファイバ式センサを使用するには、光源となる光スイッチや、信号処理のためのシグナルコンディショナが必要で、電気式ひずみセンサと比べるとシステム全体の構成が大型かつ高価なものとなる。
【0006】
そこで、本発明は、このような事情に鑑みてなされたものであり、小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システムを提供することを課題とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の力算出システムは、所定の圧力で空気を送り出す空気送出部と、前記空気送出部と接続され、前記空気送出部から送り出された空気のための流路と、前記流路における前記空気送出部と逆の端部の位置に設けられ、外力を受けると変形することで、前記流路を流れる空気の流れやすさを変化させる受感部と、前記流路を流れる空気の流量を計測する流量計と、前記受感部が受ける外力の大きさ、および、前記空気送出部から送出された空気が前記流路を流れる流量の対応関係情報を予め記憶する記憶部と、前記流量計が計測した前記流路を流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、前記受感部が受けている外力の大きさを算出する処理部と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】本実施形態の力算出システムの全体構成図である。
【図2A】チューブ挟み込み型の受感部の構成図であり、(a)は外力を受ける前の状態を示す図で、(b)は外力を受けた後の状態を示す図である。
【図2B】スリット型の受感部の構成図であり、(a)は外力を受ける前の状態を示す図で、(b)は外力を受けた後の状態を示す図である。
【図3】受感部に与えられる外力と流路を流れる空気の流量との関係を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【図4】受感部に与えられる外力と流路を流れる空気の流量との動特性を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【図5】演算装置の処理部における処理の流れを示すフローチャートである。
【図6】流路を3つ設けた場合の流路と受感部の構成を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態(以下、実施形態と称する。)に係る力算出システムについて、図面を参照しながら説明する。なお、本実施形態の力算出システム100は、例えば、内視鏡手術ロボット(以下、単に「手術ロボット」と称する。)で使用する鉗子全体にかかる、接触した内臓からの反発力や、縫合作業時の糸の張力などを算出する際に使用されることを想定している。
【0011】
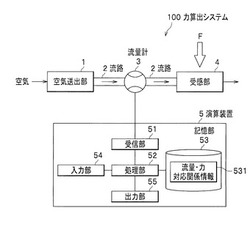
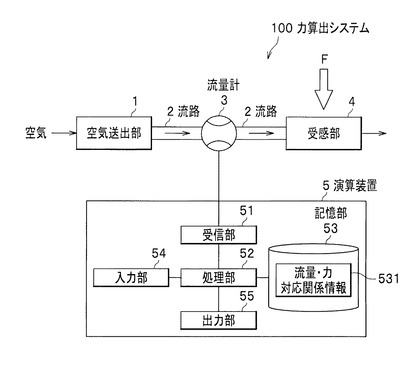
図1に示すように、力算出システム100は、空気送出部1、流路2、流量計3、受感部4および演算装置5を備えて構成される。
空気送出部1は、所定の圧力で空気を送り出す手段であり、例えば、コンプレッサと減圧弁との組み合わせにより実現することができる。
流路2は、空気送出部1と接続され、空気送出部1から送り出された空気のための流路であり、例えば、樹脂製のチューブにより実現することができる。なお、以下の説明において、流路2のうち、受感部4側を先端(部)、空気送出部1側を基端(部)とも称する。
【0012】
流量計3は、流路2を流れる空気の流量を計測する手段であり、例えば、層流型流量計(層流エレメントと両端の差圧センサ)によって実現することができる。
受感部4は、流路2の先端部に設けられ、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる手段である(詳細は後記)。
【0013】
演算装置5は、コンピュータ装置であり、受信部51、処理部52、記憶部53、入力部54および出力部55を備えて構成される。
受信部51は、流量計3からの流量の計測データを受信する手段であり、例えば、専用のIC(Integrated Circuit)によって実現することができる。
【0014】
処理部52は、各種演算処理を行う手段であり、例えば、CPU(Central Processing Unit)によって実現することができる。処理部52は、流量計3が計測した流路2を流れる空気の流量の計測データ、および、記憶部53に記憶された流量・力対応関係情報531(対応関係情報)に基づいて、受感部4が受けている外力の大きさを算出する(詳細は後記)。
【0015】
記憶部53は、情報を記憶する手段であり、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、HDD(Hard Disk Drive)等によって実現することができる。記憶部53には、受感部4が受ける外部からの力の大きさ、および、空気送出部1から送出された空気が流路2を流れる流量の対応関係を示す流量・力対応関係情報531が記憶される。流量・力対応関係情報531は、具体的には、後記する図3(a)(b)に示すグラフをデータ化した情報である。
【0016】
入力部54は、演算装置5のユーザが情報を入力する手段であり、例えば、キーボードやマウスによって実現することができる。
出力部55は、情報を出力する手段であり、例えば、外部との通信インタフェース、LCD(Liquid Crystal Display)などによって実現することができる。
【0017】
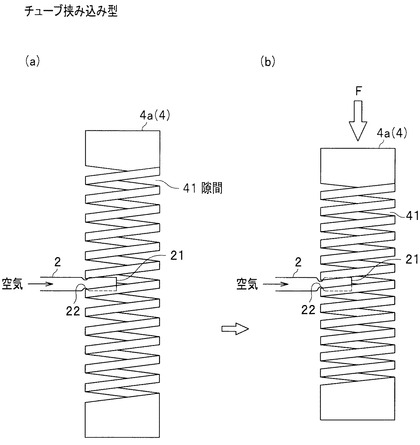
次に、受感部4について説明する。本実施形態では、受感部4として、チューブ挟み込み型とスリット型の2つのタイプについて説明する。
まず、チューブ挟み込み型の受感部4について説明する。図2A(a)に示すように、チューブ挟み込み型の受感部4a(4)は、ステンレス製で、円筒体の中間部がコイル状に形成されたコイルスプリング(弾性体)によって実現することができる。そして、受感部4aの隙間41に流路2の先端部21の付近の途中部22を挟み込んでおく。なお、ここで、流路2は弾性変形可能なチューブであることが必要である。また、受感部4aの大きさは、例えば、直径が5mm、軸方向の長さが20mm程度である。
【0018】
そして、図2A(b)に示すように、受感部4aが軸方向に力(外力)Fを受けると、隙間41の間隔が変化し、途中部22の有効断面積(空気の流通方向と垂直な面の断面積)が変化することで、流路2を流れる空気の流量が変わる。
【0019】
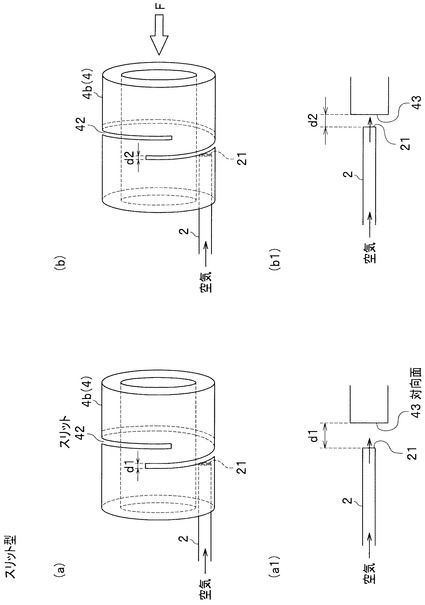
次に、スリット型の受感部4について説明する。図2B(a)に示すように、スリット型の受感部4b(4)は、全体が円筒形状のアルミニウムで構成されており、軸方向(所定方向)に外力を受けた場合に開口の間隔が変化するスリット42を有している。また、側壁の一部に流路2の先端部21をスリット42まで挿通可能な孔が設けられ、流路2は、先端部21がスリット42に開口する位置に、配置される。なお、ここでは、流路2は弾性変形可能である必要はない。また、受感部4bの大きさは、例えば、直径が10mm、軸方向の長さが15mm程度である。そして、この場合、図2B(a1)に示すように、流路2の先端部21は、スリット42の幅d1の分、対向面43と離れている。
【0020】
そして、図2B(b)に示すように、受感部4bが軸方向に力Fを受けると、スリット42の間隔がd2に変化し、流路2の先端部21から対向面43までの距離がd2に変化することで(図2B(b1)参照)、流路2を流れる空気の流量が変わる。なお、流路2の先端部21から対向面43までの距離が長いほど、流路2を流れる空気の流量は増える。
【0021】
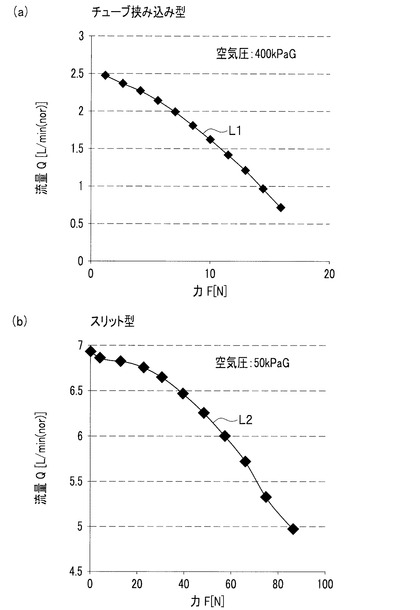
次に、外力と流量の対応関係に関する実験結果について説明する。図3(a)に示すように、チューブ挟み込み型の受感部4aを用いた実験では、空気送出部1における空気圧を400kPaG(ゲージ)(1気圧よりも400kPa高い圧力)とし、横軸に力F[N(ニュートン)]をとり、縦軸に流路2を流れる空気の流量Q[L/min(nor(0℃1気圧換算))]をとると、曲線L1という結果を得ることができた。これを見ればわかるように、受感部4aに外力を与えた場合、流路2を流れる空気の流量が有意に変化している。
【0022】
次に、図3(b)に示すように、スリット型の受感部4bを用いた実験では、空気送出部1における空気圧を50kPaGとし、横軸に力F[N]をとり、縦軸に流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L2という結果を得ることができた。これを見ればわかるように、受感部4bに外力を与えた場合、流路2を流れる空気の流量が有意に変化している。
【0023】
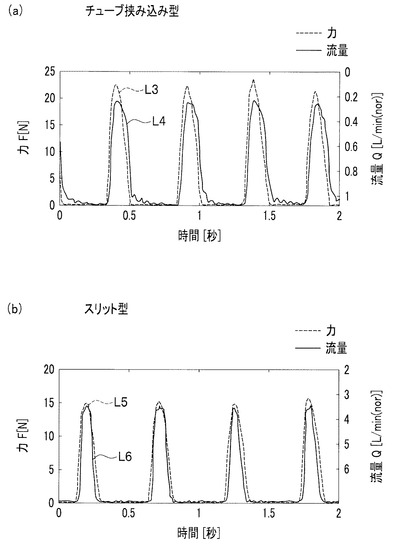
次に、受感部4の動特性(外力に対する流量変化の時間的な応答性能)に関する実験結果について説明する。図4(a)に示すように、チューブ挟み込み型の受感部4aを用いた実験では、受感部4aに20〜25N程度の外力を人間によって数回与え、横軸に時間[秒]をとり、縦軸に力F[N]および流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L3、L4という結果を得た。これを見ればわかるように、受感部4aに与える外力の時間的変化に対し、流路2を流れる空気の流量の時間的変化がほぼ追従している。
【0024】
次に、図4(b)に示すように、スリット型の受感部4bを用いた実験では、受感部4aに15〜20N程度の外力を人間によって数回与え、横軸に時間[秒]をとり、縦軸に力F[N]および流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L5、L6という結果を得た。これを見ればわかるように、受感部4bに与える外力の時間的変化に対し、流路2を流れる空気の流量の時間的変化がほぼ追従している。
【0025】
両実験に基づいて受感部4の動特性を評価すると、少なくとも、動作周波数が2〜3Hz以下のタスク(外科手術など)に受感部4を適用することを想定した場合、充分な応答性能を実現していると言える。
【0026】
次に、力算出システム100を使用する場合の演算装置5の処理について説明する。
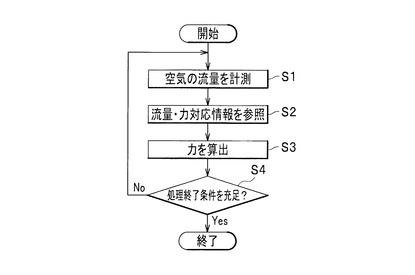
まず、演算装置5の受信部51は、流路2を流れる空気の流量を計測する(ステップS1)。具体的には、受信部51が流量計3から流路2を流れる空気の流量の計測データを受信し、その計測データに基づいて処理部52が流路2を流れる空気の流量を把握(計測)する。
【0027】
次に、処理部52は、記憶部53の流量・力対応関係情報531を参照し(ステップS2)、その流量・力対応関係情報531と、ステップS1で計測した流路2を流れる空気の流量とに基づいて、受感部4が受けている力(外力)を算出する(ステップS3)。なお、力算出システム100を手術ロボットに適用する場合、例えば、ステップS3で算出した力を遠隔で操作している医師に機械的に再現して与えるフィードバック制御を行えばよい。
【0028】
次に、処理部52は、処理終了条件を充足したか否かを判断し(ステップS4)、Yesの場合は処理を終了し、Noの場合はステップS1に戻る。なお、処理終了条件とは、例えば、ユーザによる入力部54におけるその旨の入力操作などの手動によるものでもよいし、あるいは、受感部4に対する外力が所定時間(例えば5分間)なかったという条件などの自動によるものでもよい。
【0029】
このように、本実施形態の力算出システム100によれば、流路2の先端部に設けられ、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる受感部4と、記憶部53に記憶された流量・力対応関係情報531とを用いて受感部4が受けている外力の大きさを算出することで、小型かつ安価であって、対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システム100を実現することができる。さらに具体的には、受感部4は、チューブ挟み込み型、スリット型のいずれかによって実現することができる。
【0030】
また、空気の流量を検出対象としているため、MRI装置などの電磁環境下や、原子力プラントなどの防爆環境下などにおいても、支障なく使用できる。
また、受感部4は、その構造が単純であるため、小型化でき、部品点数が少なく済み、低コストや高耐久性を実現できる。そして、手術ロボットに適用する場合、受感部4を設置する鉗子の先端部分の直径は10mm程度であるが、そのような鉗子にも受感部4を取り付けることができる。
【0031】
また、病院など、空気送出部1(空気圧源)が常設された場所においては、その空気送出部1を活用することで、全体のシステムのコンパクト化を図ることができる。
また、受感部4をステンレスやアルミニウムなどの金属で構成したことで、125℃程度の滅菌洗浄に耐えることができ、医療分野に適用することができる。
【0032】
また、受感部4と流量計3の間は空気を流通させるための流路2でつながれるので、配置の自由度が高い。つまり、光ファイバ式センサを使用すると多関節の手術ロボットに配置する光ファイバの剛性によってその手術ロボットの動きを阻害することがあるが、本実施形態では流路2として低剛性のものを使用できるので、そのような問題を容易に回避することができる。
【0033】
(変形例)
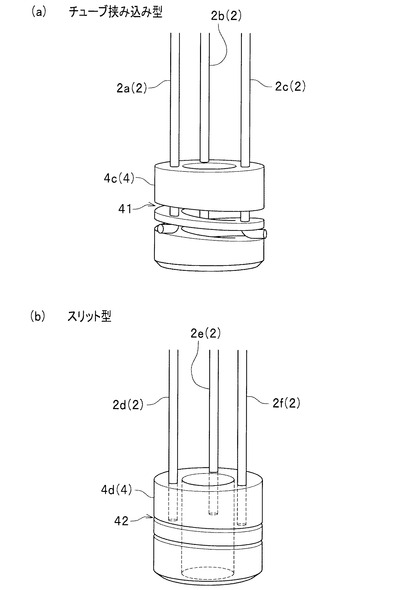
次に、受感部4の変形例について説明する。図6(a)に示すように、チューブ挟み込み型の受感部4c(4)には、3つの流路2a(2)、2b(2)、2c(2)が、異なる位置に配置されてそれぞれの隙間41に挟み込まれている。この場合、例えば、3つの流路2a、2b、2cそれぞれに別々の流量計3を配置することで、それぞれの空気の流量を計測する。
【0034】
そして、演算装置5の処理部52は、3つの流路2a、2b、2cそれぞれを流れる空気の流量と、記憶部53の流量・力対応関係情報531とに基づいて、3つの流路2a、2b、2cの先端部ごとに、受けている外力の大きさを算出することができる。そして、処理部52は、それらの情報に基づいて、受感部4cが受けている外力の大きさと向きを算出することができる。なお、3つの流路2a、2b、2cごとに、対応する流量・力対応関係情報531を別々に用意してもよい。
【0035】
また、図6(b)に示すように、スリット型の受感部4d(4)には、3つの流路2d(2)、2e(2)、2f(2)が、異なる位置に配置されている。この場合、例えば、3つの流路2d、2e、2fそれぞれに別々の流量計3を配置することで、それぞれの空気の流量を計測する。
【0036】
そして、演算装置5の処理部52は、3つの流路2d、2e、2fそれぞれを流れる空気の流量と、記憶部53の流量・力対応関係情報531とに基づいて、3つの流路2d、2e、2fの先端部ごとに、受けている外力の大きさを算出することができる。そして、処理部52は、それらの情報に基づいて、受感部4cが受けている外力の大きさと向きを算出することができる。なお、3つの流路2d、2e、2fごとに、対応する流量・力対応関係情報531を別々に用意してもよい。
【0037】
このように、変形例の受感部4によれば、流路2を複数にすることで、1つの受感部4で力の大きさと向きの算出が可能となる。
【0038】
以上で本実施形態の説明を終えるが、本発明の態様はこれらに限定されるものではない。
例えば、受感部4の材質は、前記したものに限定されず、同様の弾性変形性などを有するものであれば、チタンや樹脂など、他のものであってもよい。
【0039】
また、チューブ挟み込み型の受感部4として、コイルスプリングを例にとって説明したが、これに限定されず、流路2を挟み込む隙間を有し、外力を受けるとその隙間の大きさが変化するものであれば、リーフスプリング、トーションスプリング、あるいはスプリング以外の弾性体など、他のものでもよい。
【0040】
また、演算装置5としてコンピュータ装置の場合について説明したが、代わりに、受信部51、処理部52、記憶部53などが一体となったICやLSI(Large Scale Integration)などを用いてもよい。
また、受感部4b(図2B参照)は、全体が円筒形状でなくても角型形状などの他の形状でもよく、螺旋状のスリット42は1条強でなくても2条以上でもよく、さらに、底面部分の片方あるいは両方が閉塞されていてもよい。
【0041】
また、本実施形態では、受感部4に対して押す方向の力を与える場合について説明したが、受感部4に対して引く方向の力を与える場合(手術ロボットが縫合作業をする場合など)についても同様に実現できる。その場合、図3(a)(b)に示すグラフの情報のほかに、力Fが負の場合の力Fと流量Qとの対応関係を予め調べておけばよい。
その他、ハードウェアやフローチャートなどの具体的な構成について、本発明の趣旨を逸脱しない範囲で適宜変更が可能である。
【符号の説明】
【0042】
1 空気送出部
2 流路
3 流量計
4 受感部
5 演算装置
21 先端部
22 途中部
41 隙間
42 スリット
43 対向面
51 受信部
52 処理部
53 記憶部
54 入力部
55 出力部
100 力算出システム
531 流量・力対応関係情報
【技術分野】
【0001】
本発明は、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する技術に関する。
【背景技術】
【0002】
従来から、力を計測する技術として、電気抵抗の変化を利用したひずみゲージ(以下、「電気式ひずみセンサ」と称する。)や、受感部に圧電素子を搭載したロードセルが広く使用されている。しかし、これらは電気的な物理現象を利用したセンサであるため、MRI(Magnetic Resonance Imaging)装置などの強い電磁環境下では使用できない。また、他の電気的なデバイスと干渉し、計測の精度が悪化するという問題も起こりうる。
【0003】
そこで、光ファイバ式のひずみゲージ(以下、「光ファイバ式センサ」と称する。)が実用化されている(非特許文献1、2参照)。この技術によれば、受感部のひずみによる光の波長、周波数、位相、透過量などの変化を検出するため、前記のような電気的要素に起因する問題は起こらない。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】J. Peirs, et al., “A micro optical force sensor for force feedback during minimally invasive robotic surgery”, Sensors and Actuators A 115 (2004), pp.447-455.
【非特許文献2】P. Polygerinos, et al., “A Fibre-Optic Catheter-Tip Force Sensor with MRI Compatibility: A Feasibility Study”, 31st Annual International Conference of the IEEE EMBS Minneapolis, Minnesota, USA, September 2-6, 2009, pp.1501-1504.
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、光ファイバ式センサを使用するには、光源となる光スイッチや、信号処理のためのシグナルコンディショナが必要で、電気式ひずみセンサと比べるとシステム全体の構成が大型かつ高価なものとなる。
【0006】
そこで、本発明は、このような事情に鑑みてなされたものであり、小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システムを提供することを課題とする。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明の力算出システムは、所定の圧力で空気を送り出す空気送出部と、前記空気送出部と接続され、前記空気送出部から送り出された空気のための流路と、前記流路における前記空気送出部と逆の端部の位置に設けられ、外力を受けると変形することで、前記流路を流れる空気の流れやすさを変化させる受感部と、前記流路を流れる空気の流量を計測する流量計と、前記受感部が受ける外力の大きさ、および、前記空気送出部から送出された空気が前記流路を流れる流量の対応関係情報を予め記憶する記憶部と、前記流量計が計測した前記流路を流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、前記受感部が受けている外力の大きさを算出する処理部と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】本実施形態の力算出システムの全体構成図である。
【図2A】チューブ挟み込み型の受感部の構成図であり、(a)は外力を受ける前の状態を示す図で、(b)は外力を受けた後の状態を示す図である。
【図2B】スリット型の受感部の構成図であり、(a)は外力を受ける前の状態を示す図で、(b)は外力を受けた後の状態を示す図である。
【図3】受感部に与えられる外力と流路を流れる空気の流量との関係を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【図4】受感部に与えられる外力と流路を流れる空気の流量との動特性を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【図5】演算装置の処理部における処理の流れを示すフローチャートである。
【図6】流路を3つ設けた場合の流路と受感部の構成を示す図で、(a)はチューブ挟み込み型の場合の一例を示す図であり、(b)はスリット型の場合の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態(以下、実施形態と称する。)に係る力算出システムについて、図面を参照しながら説明する。なお、本実施形態の力算出システム100は、例えば、内視鏡手術ロボット(以下、単に「手術ロボット」と称する。)で使用する鉗子全体にかかる、接触した内臓からの反発力や、縫合作業時の糸の張力などを算出する際に使用されることを想定している。
【0011】
図1に示すように、力算出システム100は、空気送出部1、流路2、流量計3、受感部4および演算装置5を備えて構成される。
空気送出部1は、所定の圧力で空気を送り出す手段であり、例えば、コンプレッサと減圧弁との組み合わせにより実現することができる。
流路2は、空気送出部1と接続され、空気送出部1から送り出された空気のための流路であり、例えば、樹脂製のチューブにより実現することができる。なお、以下の説明において、流路2のうち、受感部4側を先端(部)、空気送出部1側を基端(部)とも称する。
【0012】
流量計3は、流路2を流れる空気の流量を計測する手段であり、例えば、層流型流量計(層流エレメントと両端の差圧センサ)によって実現することができる。
受感部4は、流路2の先端部に設けられ、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる手段である(詳細は後記)。
【0013】
演算装置5は、コンピュータ装置であり、受信部51、処理部52、記憶部53、入力部54および出力部55を備えて構成される。
受信部51は、流量計3からの流量の計測データを受信する手段であり、例えば、専用のIC(Integrated Circuit)によって実現することができる。
【0014】
処理部52は、各種演算処理を行う手段であり、例えば、CPU(Central Processing Unit)によって実現することができる。処理部52は、流量計3が計測した流路2を流れる空気の流量の計測データ、および、記憶部53に記憶された流量・力対応関係情報531(対応関係情報)に基づいて、受感部4が受けている外力の大きさを算出する(詳細は後記)。
【0015】
記憶部53は、情報を記憶する手段であり、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、HDD(Hard Disk Drive)等によって実現することができる。記憶部53には、受感部4が受ける外部からの力の大きさ、および、空気送出部1から送出された空気が流路2を流れる流量の対応関係を示す流量・力対応関係情報531が記憶される。流量・力対応関係情報531は、具体的には、後記する図3(a)(b)に示すグラフをデータ化した情報である。
【0016】
入力部54は、演算装置5のユーザが情報を入力する手段であり、例えば、キーボードやマウスによって実現することができる。
出力部55は、情報を出力する手段であり、例えば、外部との通信インタフェース、LCD(Liquid Crystal Display)などによって実現することができる。
【0017】
次に、受感部4について説明する。本実施形態では、受感部4として、チューブ挟み込み型とスリット型の2つのタイプについて説明する。
まず、チューブ挟み込み型の受感部4について説明する。図2A(a)に示すように、チューブ挟み込み型の受感部4a(4)は、ステンレス製で、円筒体の中間部がコイル状に形成されたコイルスプリング(弾性体)によって実現することができる。そして、受感部4aの隙間41に流路2の先端部21の付近の途中部22を挟み込んでおく。なお、ここで、流路2は弾性変形可能なチューブであることが必要である。また、受感部4aの大きさは、例えば、直径が5mm、軸方向の長さが20mm程度である。
【0018】
そして、図2A(b)に示すように、受感部4aが軸方向に力(外力)Fを受けると、隙間41の間隔が変化し、途中部22の有効断面積(空気の流通方向と垂直な面の断面積)が変化することで、流路2を流れる空気の流量が変わる。
【0019】
次に、スリット型の受感部4について説明する。図2B(a)に示すように、スリット型の受感部4b(4)は、全体が円筒形状のアルミニウムで構成されており、軸方向(所定方向)に外力を受けた場合に開口の間隔が変化するスリット42を有している。また、側壁の一部に流路2の先端部21をスリット42まで挿通可能な孔が設けられ、流路2は、先端部21がスリット42に開口する位置に、配置される。なお、ここでは、流路2は弾性変形可能である必要はない。また、受感部4bの大きさは、例えば、直径が10mm、軸方向の長さが15mm程度である。そして、この場合、図2B(a1)に示すように、流路2の先端部21は、スリット42の幅d1の分、対向面43と離れている。
【0020】
そして、図2B(b)に示すように、受感部4bが軸方向に力Fを受けると、スリット42の間隔がd2に変化し、流路2の先端部21から対向面43までの距離がd2に変化することで(図2B(b1)参照)、流路2を流れる空気の流量が変わる。なお、流路2の先端部21から対向面43までの距離が長いほど、流路2を流れる空気の流量は増える。
【0021】
次に、外力と流量の対応関係に関する実験結果について説明する。図3(a)に示すように、チューブ挟み込み型の受感部4aを用いた実験では、空気送出部1における空気圧を400kPaG(ゲージ)(1気圧よりも400kPa高い圧力)とし、横軸に力F[N(ニュートン)]をとり、縦軸に流路2を流れる空気の流量Q[L/min(nor(0℃1気圧換算))]をとると、曲線L1という結果を得ることができた。これを見ればわかるように、受感部4aに外力を与えた場合、流路2を流れる空気の流量が有意に変化している。
【0022】
次に、図3(b)に示すように、スリット型の受感部4bを用いた実験では、空気送出部1における空気圧を50kPaGとし、横軸に力F[N]をとり、縦軸に流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L2という結果を得ることができた。これを見ればわかるように、受感部4bに外力を与えた場合、流路2を流れる空気の流量が有意に変化している。
【0023】
次に、受感部4の動特性(外力に対する流量変化の時間的な応答性能)に関する実験結果について説明する。図4(a)に示すように、チューブ挟み込み型の受感部4aを用いた実験では、受感部4aに20〜25N程度の外力を人間によって数回与え、横軸に時間[秒]をとり、縦軸に力F[N]および流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L3、L4という結果を得た。これを見ればわかるように、受感部4aに与える外力の時間的変化に対し、流路2を流れる空気の流量の時間的変化がほぼ追従している。
【0024】
次に、図4(b)に示すように、スリット型の受感部4bを用いた実験では、受感部4aに15〜20N程度の外力を人間によって数回与え、横軸に時間[秒]をとり、縦軸に力F[N]および流路2を流れる空気の流量Q[L/min(nor)]をとると、曲線L5、L6という結果を得た。これを見ればわかるように、受感部4bに与える外力の時間的変化に対し、流路2を流れる空気の流量の時間的変化がほぼ追従している。
【0025】
両実験に基づいて受感部4の動特性を評価すると、少なくとも、動作周波数が2〜3Hz以下のタスク(外科手術など)に受感部4を適用することを想定した場合、充分な応答性能を実現していると言える。
【0026】
次に、力算出システム100を使用する場合の演算装置5の処理について説明する。
まず、演算装置5の受信部51は、流路2を流れる空気の流量を計測する(ステップS1)。具体的には、受信部51が流量計3から流路2を流れる空気の流量の計測データを受信し、その計測データに基づいて処理部52が流路2を流れる空気の流量を把握(計測)する。
【0027】
次に、処理部52は、記憶部53の流量・力対応関係情報531を参照し(ステップS2)、その流量・力対応関係情報531と、ステップS1で計測した流路2を流れる空気の流量とに基づいて、受感部4が受けている力(外力)を算出する(ステップS3)。なお、力算出システム100を手術ロボットに適用する場合、例えば、ステップS3で算出した力を遠隔で操作している医師に機械的に再現して与えるフィードバック制御を行えばよい。
【0028】
次に、処理部52は、処理終了条件を充足したか否かを判断し(ステップS4)、Yesの場合は処理を終了し、Noの場合はステップS1に戻る。なお、処理終了条件とは、例えば、ユーザによる入力部54におけるその旨の入力操作などの手動によるものでもよいし、あるいは、受感部4に対する外力が所定時間(例えば5分間)なかったという条件などの自動によるものでもよい。
【0029】
このように、本実施形態の力算出システム100によれば、流路2の先端部に設けられ、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる受感部4と、記憶部53に記憶された流量・力対応関係情報531とを用いて受感部4が受けている外力の大きさを算出することで、小型かつ安価であって、対象部分に電気的な装置を使わずに、その部分に与えられている力を算出する力算出システム100を実現することができる。さらに具体的には、受感部4は、チューブ挟み込み型、スリット型のいずれかによって実現することができる。
【0030】
また、空気の流量を検出対象としているため、MRI装置などの電磁環境下や、原子力プラントなどの防爆環境下などにおいても、支障なく使用できる。
また、受感部4は、その構造が単純であるため、小型化でき、部品点数が少なく済み、低コストや高耐久性を実現できる。そして、手術ロボットに適用する場合、受感部4を設置する鉗子の先端部分の直径は10mm程度であるが、そのような鉗子にも受感部4を取り付けることができる。
【0031】
また、病院など、空気送出部1(空気圧源)が常設された場所においては、その空気送出部1を活用することで、全体のシステムのコンパクト化を図ることができる。
また、受感部4をステンレスやアルミニウムなどの金属で構成したことで、125℃程度の滅菌洗浄に耐えることができ、医療分野に適用することができる。
【0032】
また、受感部4と流量計3の間は空気を流通させるための流路2でつながれるので、配置の自由度が高い。つまり、光ファイバ式センサを使用すると多関節の手術ロボットに配置する光ファイバの剛性によってその手術ロボットの動きを阻害することがあるが、本実施形態では流路2として低剛性のものを使用できるので、そのような問題を容易に回避することができる。
【0033】
(変形例)
次に、受感部4の変形例について説明する。図6(a)に示すように、チューブ挟み込み型の受感部4c(4)には、3つの流路2a(2)、2b(2)、2c(2)が、異なる位置に配置されてそれぞれの隙間41に挟み込まれている。この場合、例えば、3つの流路2a、2b、2cそれぞれに別々の流量計3を配置することで、それぞれの空気の流量を計測する。
【0034】
そして、演算装置5の処理部52は、3つの流路2a、2b、2cそれぞれを流れる空気の流量と、記憶部53の流量・力対応関係情報531とに基づいて、3つの流路2a、2b、2cの先端部ごとに、受けている外力の大きさを算出することができる。そして、処理部52は、それらの情報に基づいて、受感部4cが受けている外力の大きさと向きを算出することができる。なお、3つの流路2a、2b、2cごとに、対応する流量・力対応関係情報531を別々に用意してもよい。
【0035】
また、図6(b)に示すように、スリット型の受感部4d(4)には、3つの流路2d(2)、2e(2)、2f(2)が、異なる位置に配置されている。この場合、例えば、3つの流路2d、2e、2fそれぞれに別々の流量計3を配置することで、それぞれの空気の流量を計測する。
【0036】
そして、演算装置5の処理部52は、3つの流路2d、2e、2fそれぞれを流れる空気の流量と、記憶部53の流量・力対応関係情報531とに基づいて、3つの流路2d、2e、2fの先端部ごとに、受けている外力の大きさを算出することができる。そして、処理部52は、それらの情報に基づいて、受感部4cが受けている外力の大きさと向きを算出することができる。なお、3つの流路2d、2e、2fごとに、対応する流量・力対応関係情報531を別々に用意してもよい。
【0037】
このように、変形例の受感部4によれば、流路2を複数にすることで、1つの受感部4で力の大きさと向きの算出が可能となる。
【0038】
以上で本実施形態の説明を終えるが、本発明の態様はこれらに限定されるものではない。
例えば、受感部4の材質は、前記したものに限定されず、同様の弾性変形性などを有するものであれば、チタンや樹脂など、他のものであってもよい。
【0039】
また、チューブ挟み込み型の受感部4として、コイルスプリングを例にとって説明したが、これに限定されず、流路2を挟み込む隙間を有し、外力を受けるとその隙間の大きさが変化するものであれば、リーフスプリング、トーションスプリング、あるいはスプリング以外の弾性体など、他のものでもよい。
【0040】
また、演算装置5としてコンピュータ装置の場合について説明したが、代わりに、受信部51、処理部52、記憶部53などが一体となったICやLSI(Large Scale Integration)などを用いてもよい。
また、受感部4b(図2B参照)は、全体が円筒形状でなくても角型形状などの他の形状でもよく、螺旋状のスリット42は1条強でなくても2条以上でもよく、さらに、底面部分の片方あるいは両方が閉塞されていてもよい。
【0041】
また、本実施形態では、受感部4に対して押す方向の力を与える場合について説明したが、受感部4に対して引く方向の力を与える場合(手術ロボットが縫合作業をする場合など)についても同様に実現できる。その場合、図3(a)(b)に示すグラフの情報のほかに、力Fが負の場合の力Fと流量Qとの対応関係を予め調べておけばよい。
その他、ハードウェアやフローチャートなどの具体的な構成について、本発明の趣旨を逸脱しない範囲で適宜変更が可能である。
【符号の説明】
【0042】
1 空気送出部
2 流路
3 流量計
4 受感部
5 演算装置
21 先端部
22 途中部
41 隙間
42 スリット
43 対向面
51 受信部
52 処理部
53 記憶部
54 入力部
55 出力部
100 力算出システム
531 流量・力対応関係情報
【特許請求の範囲】
【請求項1】
所定の圧力で空気を送り出す空気送出部と、
前記空気送出部と接続され、前記空気送出部から送り出された空気のための流路と、
前記流路における前記空気送出部と逆の端部の位置に設けられ、外力を受けると変形することで、前記流路を流れる空気の流れやすさを変化させる受感部と、
前記流路を流れる空気の流量を計測する流量計と、
前記受感部が受ける外力の大きさ、および、前記空気送出部から送出された空気が前記流路を流れる流量の対応関係情報を予め記憶する記憶部と、
前記流量計が計測した前記流路を流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、前記受感部が受けている外力の大きさを算出する処理部と、
を備えることを特徴とする力算出システム。
【請求項2】
前記受感部は、前記流路を挟み込む隙間を有し、外力を受けると前記隙間の大きさが変化する弾性体であり、
前記流路は、弾性変形可能なチューブであって、前記空気送出部に接続される端部と逆の端部が前記弾性体の隙間に挟み込まれており、
前記弾性体が外力を受けると、前記隙間の大きさが変化することで、前記チューブを流れる空気の流量が変わる
ことを特徴とする請求項1に記載の力算出システム。
【請求項3】
前記受感部は、所定方向に前記外力を受けた場合に開口の間隔が変化するスリットを有しており、
前記流路は、チューブであって、前記空気送出部に接続される端部と逆の端部が前記受感部のスリットに開口する位置に配置されており、
前記受感部が前記所定方向に外力を受けると、前記スリットの開口の間隔が変化し、前記チューブにおける前記逆の端部からその対向面までの距離が変化することで、前記チューブを流れる空気の流量が変わる
ことを特徴とする請求項1に記載の力算出システム。
【請求項4】
前記流路は、複数設けられ、それぞれの一端が直接または間接的に前記空気送出部と接続され、それぞれ他端が前記受感部の異なる位置に配置され、
前記流量計は、複数の前記流路それぞれに対して設けられ、
前記処理部は、複数の前記流路それぞれを流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、複数の前記流路の他端の部分ごとに、受けている外力の大きさを算出する
ことを特徴とする請求項1から請求項3までのいずれか一項に記載の力算出システム。
【請求項1】
所定の圧力で空気を送り出す空気送出部と、
前記空気送出部と接続され、前記空気送出部から送り出された空気のための流路と、
前記流路における前記空気送出部と逆の端部の位置に設けられ、外力を受けると変形することで、前記流路を流れる空気の流れやすさを変化させる受感部と、
前記流路を流れる空気の流量を計測する流量計と、
前記受感部が受ける外力の大きさ、および、前記空気送出部から送出された空気が前記流路を流れる流量の対応関係情報を予め記憶する記憶部と、
前記流量計が計測した前記流路を流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、前記受感部が受けている外力の大きさを算出する処理部と、
を備えることを特徴とする力算出システム。
【請求項2】
前記受感部は、前記流路を挟み込む隙間を有し、外力を受けると前記隙間の大きさが変化する弾性体であり、
前記流路は、弾性変形可能なチューブであって、前記空気送出部に接続される端部と逆の端部が前記弾性体の隙間に挟み込まれており、
前記弾性体が外力を受けると、前記隙間の大きさが変化することで、前記チューブを流れる空気の流量が変わる
ことを特徴とする請求項1に記載の力算出システム。
【請求項3】
前記受感部は、所定方向に前記外力を受けた場合に開口の間隔が変化するスリットを有しており、
前記流路は、チューブであって、前記空気送出部に接続される端部と逆の端部が前記受感部のスリットに開口する位置に配置されており、
前記受感部が前記所定方向に外力を受けると、前記スリットの開口の間隔が変化し、前記チューブにおける前記逆の端部からその対向面までの距離が変化することで、前記チューブを流れる空気の流量が変わる
ことを特徴とする請求項1に記載の力算出システム。
【請求項4】
前記流路は、複数設けられ、それぞれの一端が直接または間接的に前記空気送出部と接続され、それぞれ他端が前記受感部の異なる位置に配置され、
前記流量計は、複数の前記流路それぞれに対して設けられ、
前記処理部は、複数の前記流路それぞれを流れる空気の流量、および、前記記憶部に記憶された対応関係情報に基づいて、複数の前記流路の他端の部分ごとに、受けている外力の大きさを算出する
ことを特徴とする請求項1から請求項3までのいずれか一項に記載の力算出システム。
【図1】


【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−229980(P2012−229980A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−98178(P2011−98178)
【出願日】平成23年4月26日(2011.4.26)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月26日(2011.4.26)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
[ Back to top ]