
力覚型ヒューマンナビゲーションシステム
【課題】ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、触覚感覚・力覚感覚を利用して利用者に進行すべき方向を直感的に理解しやすい形で提示する。
【解決手段】誘導用の地図を見ないでも人を目的地に誘導するための装置として、目的地入力装置102、位置・方位測定装置103、地図地理情報記憶装置105、ルート検索装置106、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113、外部記憶装置109、通信装置107を備える。方向感覚提示用デバイスとして、赤外線通信等を介してワイヤレスに制御される掌サイズの力覚情報提示デバイスを実現し、このデバイスを利用して利用者に目的地への方向を直感的に提示する。
【解決手段】誘導用の地図を見ないでも人を目的地に誘導するための装置として、目的地入力装置102、位置・方位測定装置103、地図地理情報記憶装置105、ルート検索装置106、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113、外部記憶装置109、通信装置107を備える。方向感覚提示用デバイスとして、赤外線通信等を介してワイヤレスに制御される掌サイズの力覚情報提示デバイスを実現し、このデバイスを利用して利用者に目的地への方向を直感的に提示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、力覚情報提示デバイスを利用して人を目的地に誘導する力覚型ヒューマンナビゲーションシステムに関する。
【背景技術】
【0002】
近年、カーナビ(カーナビゲーションシステム)が普及し、その装置の低価格化・高機能化が進んでいる。運転者は運転を始める前に目的地をカーナビ装置に入力すると、ディスプレイ画面上に現在位置、進行方向が表示され、分岐点・交差点においては詳細図がポップアップされたり、音声ガイドが注意を促してくれるサービスを受けることができる。運転者は運転をしながら瞬間的な判断で次への経路を選んでいくことは大変なストレスであり、そのためカーナビは特に初めての地を訪れる時などは抜群の利便性を発揮してくれる。
【0003】
しかし、運転者は運転時に、ディスプレイ画面上に表示された地名・住所やランドマークを手がかりに、地図と現実空間を照合するなどの「地図を読む能力」が必要とされるため、加齢にともなう視力や空間認識力の低下によって、読地図能力の低下や標識などの見落としが増えてくる。また、複雑な交差点にさしかかった時にはディスプレイ画面に詳細図がポップアップされるが、ディスプレイ画面を見るために、運転中に脇見をすることは好ましいことではない。また、5差路や直交していない道路などでは音声ガイドでは十分に説明できない時がある。
【0004】
最近では、カーナビの利便性が認知されるにともない、GPS(Global Positioning System)モジュールが装備できるPDA−GPSやGPS機能が搭載された携帯電話機が発売されるなど、所謂「ヒューマンナビ」「ウォーキングナビ」「ヒトナビ」などと呼ばれる手の平サイズの携帯型ナビゲーション環境が整いつつある。また、カーナビとPDA(Personal Digital Assistant)間でナビ情報(ナビゲーション情報)を共有してカーナビ・ヒトナビが連携したシームレスな環境も提供されてきている。
【0005】
しかしながら、カーナビの運転時の視認性問題と同様に、携帯型のヒトナビを利用する場合にも、ユーザがチラチラとナビの画面に視線を落としながら見知らぬ街を歩くことは容易なことではない。また、ユーザが店舗のショーウィンドウや仲間との会話を楽しみながら目的地を目指す場合には、視覚情報及び聴覚情報だけに頼ったナビは適当ではない。
【0006】
これらの問題を解決するために、視覚や音声によることなくルート案内を行うナビゲーション装置が提案されてきている。例えば、運転中に左折または右折すべき交差点を振動手段によって知らせる装置(特許文献1)や、右折すべき場所でハンドルに右回転の衝撃を与えたり、左右に配置された振動手段のうち右側の振動手段のみを振動させて右折を知らせたりする装置(特許文献2)が提案されている。また、前後左右の4つに可動ペグを配置し、進行方向に対応した可動ペグを上昇させる方向指示キューを備えた触覚方向指示装置(特許文献3)も提案されている。しかし、これらは歩行時の使用には適当ではなく、触覚感覚を用いた方向指示装置は方向分解能が低く、直感的に進行すべき方向が理解し難い。
【0007】
ヒューマンナビゲーションシステムでは、携帯が可能であり、人が歩きながら使用するためにも小型で非接地型が望ましく、方向を指示するには触覚感覚を利用するよりもトルクなどの力覚感覚を用いた方が直感的で理解しやすい。非接地型の力覚情報提示デバイスとしては、ジャイロモーメントとジンバル構造を用いたトルク提示装置が開発され、これと赤外線距離センサを組み合わせた領域提示システムによってバーチャルな壁を知覚させることで人を誘導する方法が提案されている(非特許文献1)。しかし、ジンバル構造では提示できるトルク方向が制限されており、また、構造が複雑になり制御が煩雑となる問題点もある。
【0008】
これに対して、3軸直交座標に配置された3つのジャイロモータの回転を独立に制御することで任意の方向・大きさにトルクを呈示することができる非接地・可搬型の力覚情報提示デバイス(非特許文献2)が提案されている。3つのジャイロモータによって発生された角運動量合成ベクトルを制御することでトルクを発生させているため、構造が比較的に簡単であり、制御も容易である。しかし、質量および慣性モーメントのバランス、人の自然な動きによって発生する擾乱トルクが解決すべき点となっている。
【0009】
【特許文献1】特開平11−160087号公報
【特許文献2】特開平09−133545号公報
【特許文献3】特開2000−352521号公報
【非特許文献1】吉江 将之、矢野博明、岩田 洋夫、「ジャイロモーメントを用いた非設置型力覚提示装置の開発」、ヒューマンインタフェース学会研究報告集、vol.3, No.5,pp. 25-30 (2000)
【非特許文献2】田中洋吉、酒井勝隆、河野優香、福井幸男、山下樹里、中村則雄、“Mobile Torque Display andHaptic Characteristics of Human Palm”, INTERNATIONAL CONFERENCE ON ARTIFICIALREALITY AND TELEXISTENCE, pp.115-120(2001/12)
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述のように、運転時にカーナビの視認性および音声ガイドの理解度が問題であるのと同様に、携帯型のヒューマンナビゲーションシステムを利用する場合にも、チラチラとナビの画面に視線を落としながら見知らぬ街を歩くことは容易なことではなく、また、店舗のショーウィンドウや仲間との会話を楽しみながら目的地を目指す場合には視覚情報及び聴覚情報だけに頼ったナビは適当ではない。
【0011】
そこで、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、触覚・力覚感覚などを利用して進行すべき方向を直感的に理解しやすい形で提示することが必要である。
【0012】
本発明の目的は、上述のような従来技術の課題に鑑み、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、力覚感覚を利用して進行すべき方向を直感的に理解しやすい形で提示する力覚型ヒューマンナビゲーションシステムを提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明のヒューマンナビゲーションシステムは、ユーザが目的地の位置情報を入力するための目的地入力手段と、現在位置を測位する位置及び方位測定手段と、時刻表と乗り換え情報、及び地図地理情報を予め格納している地図地理情報記憶手段と、前記目的地入力手段から得られる前記目的地の位置情報と前記位置及び方位測定手段から得られる前記現在位置の位置情報とを前記地図地理情報記憶手段に格納されている前記地図地理情報に照らし合わせ、評価基準を基に最適ルートを検索するルート検索手段と、前記最適ルートの位置及び方位情報と前記現在位置の位置及び方位情報とからユーザが現在進むべき進行方向を算出する演算手段と、前記演算手段で算出された方向の情報に応じてその方向に向かう力をユーザに対し提示することで前記目的地までユーザを誘導する力覚情報出力手段と、を有する。前記力覚情報出力手段は、複数個のジャイロモータ、もしくは重心近くで対峙させた複数組のツイン・ジャイロモータ、もしくはジンバル構造のジャイロモータを独立に制御することで、任意の方向及び大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させる。前記力覚情報出力手段は、一対のツイン・ジャイロモータを、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる。
【発明の効果】
【0014】
以上説明したように,本発明によれば、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、力覚感覚を利用して進行すべき方向を直感的に理解しやすい形で提示する力覚型ヒューマンナビゲーションシステムが実現できる。
【0015】
よって、本発明のヒューマンナビゲーションシステムを用いれば、次の効果が得られる。
(1)霧の中や暗闇などの視界が悪い場所でもナビゲーションシステムの利用が効果的になる。
(2)森林・原野などのランドマークがない場所でもナビゲーションシステムの利用が効果的になる。
(3)地震によってビルなどが倒壊した場合の災害時においても有効である。
(4)更に、視覚情報提示装置・聴覚情報提示装置・触覚情報提示装置・力覚情報提示装置の少なくともいずれか一つとそれ以外の装置群をワイヤレスに接続することで装着感・操作性を向上させることができる。
【0016】
このように、本発明のヒューマンナビゲーションシステムは、視覚障害者、聴覚障害者および晴眼者にも効果的な誘導デバイスである。また、本発明のヒューマンナビゲーションシステムは、人を目的地に誘導する他に、ロボットの誘導およびカーナビとしても利用することができる。
【0017】
また、ヒューマンナビゲーションシステムで用いる本発明の力覚情報提示デバイスとしては、以下の利点がある。
(a)制御方式として、複数のジャイロモータを独立に制御することで、任意の方向・大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させる方法を用いているため、制御が容易であり、変化に富んだ3次元力覚感覚を提示できる。
(b)また、慣性質量部分を重心近くで対峙させた3組のツイン・ジャイロモータ方式を用いたり、モータ固定用のフレーム形状を点対称構造である球形に近づけることで、質量バランスや慣性モーメントが向上している。慣性質量を重心に集中させることで、人の動きで生じる余計な慣性力の低減が図られている。
(c)ジンバル構造を用いた場合には、ジンバル構造自身が余計な慣性モーメントを持ち擾乱トルクを発生させる。また、ジンバルの可動部分の構造が煩雑となる。これに対して、本発明の複数のジャイロモータを固定した方法では、構造が単純となり、力学的に強い強度が得られる。また、小型化した場合にも構造が単純なため加工が容易である。
(d)非接地型のため、従来のように接地用アームやワイヤが不要であり、身体の動きを拘束しない。複数の力覚情報入出力装置が干渉せずに共存できる。ユーザの動作・行動への制限が少なく、小型・携帯性に優れており、屋内・屋外を含む広範囲での使用が可能である。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
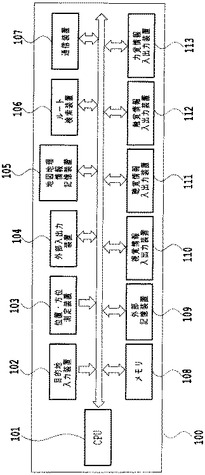
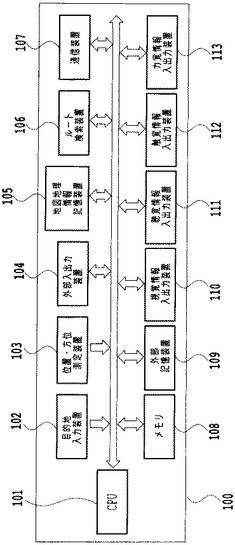
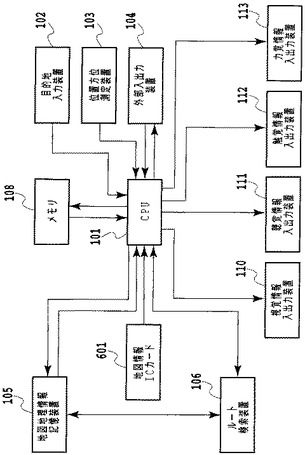
図1は、本発明の一実施形態における力覚型ヒューマンナビゲーションシステム(以下、ハプティックナビと称する)の概略構成を示す。ハプティックナビ100は、目的地入力装置102により目的地の位置情報がユーザにより入力される。入力された目的地の位置情報は位置・方位測定装置103により測位された現在位置情報と比較され、その比較結果と地図地理情報記憶装置105に予め記憶されている電車・地下鉄・バスなどの時刻表・乗り換え情報、および駅構内や駅ビルなどの立体地図を含む地図地理情報をもとに、ルート検索装置106によって、最短時間、最短距離、最低料金、歩行スピードなどの評価基準に照らし合わせて最適ルートの候補が計算される。
【0019】
デイスプレイと撮像デバイスとを含む視覚情報入出力装置110、スピーカとマイクを含む聴覚情報入出力装置111、もしくは触覚情報出力デバイスと触覚センサを含む触覚情報入出力装置112の少なくともいずれか一つに提示された上記最適ルートの候補から、ユーザにより希望する最適ルートが後述の図5に示すような外部入出力装置104を用いて選択される。選択された最適ルートに関する情報がメモリ108に一時記憶される。
【0020】
ユーザ(すなわち、ハプティックナビ100)の移動に伴った現在位置の更新に伴い、CPU101においてユーザの誘導に関する情報が計算され、それにより得られた誘導情報が、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報提示デバイスと力覚センサとを含む力覚情報入出力装置113の少なくともいずれか一つを介してユーザに提示される。ユーザは提示されたこれらの誘導情報をもとに目的地に無事にたどり着くことができる。
【0021】
特に、力覚情報入出力装置113は、3次元の任意の方向を指し示すことができ、これにより高さ方向の情報が提示することができ、そのため、地図上では同じ位置で表わされる路面を歩くこと、と陸橋・歩道橋を歩くこと、地下を歩くこと、とを区別して誘導することができる。
【0022】
目的地までのルート途中において、視覚情報入出力装置110のカメラ(図示しない)によって撮像された街並みなどの環境映像、聴覚情報入出力装置111のマイク(図示しない)によってユーザが道を尋ねた時の会話や環境音などが収集され、これら環境映像や環境音などが、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112の少なくともいずれか一つによって提示された情報、および力覚情報入出力装置113によって提示された情報、CPU101の時刻情報、位置・方位測定装置103の位置情報、方位情報、外部入出力装置104の入力情報などと一緒に、メモリカード(図示しない)のような外部記憶装置109に誘導記録情報として記録される。外部記憶装置109に記録された誘導記録情報は、目的地到着後に、通信装置107を介してインターネットに接続された個人のホームサーバなどに自動的に転送・保存することもできる。
【0023】
外部記憶装置109に記録された情報は、ルート途中でも目的地到着後でも、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つを介して参照することができる。
【0024】
通信装置107は、図2で後述するように、遠隔地にある他のハプティックナビとインターネットのような通信回線を介して情報およびデータ交換を行う際に使用される。例えば、目的地の情報を遠隔のハプティックナビから入力したり、外部記憶装置109に逐次記録されている誘導記録情報を通信装置107を介して遠隔地のハプティックナビの視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つで参照したりすることができる。また、遠隔地のハプティックナビの視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つを介して遠隔地にいる被誘導対象者を適確に誘導することもできる。
【0025】
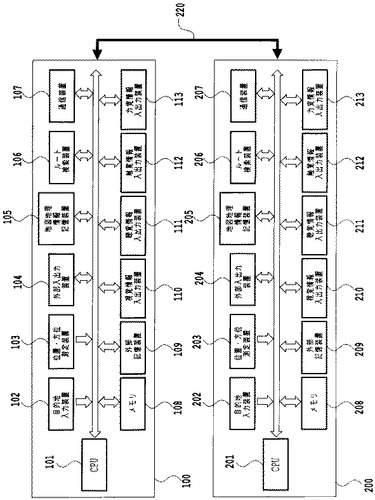
図2は、2つ以上のハプティックナビ間の通信方法を示す。通信装置107、207と通信回線220を介して、複数のハプティックナビ100、200間で情報およびデータ交換が可能である。通信装置107、207と通信回線220を通じて、遠隔地にあるハプティックナビ200の視覚情報入出力装置210および聴覚情報入出力装置211により収集した遠隔地の街並みの映像や環境音を、通信相手のハプティックナビ100の視覚情報入出力装置110および聴覚情報入出力装置111でモニタしたり、聴覚情報入出力装置111と211を介して遠隔地にいるユーザと音声会話をすることで遠隔地の誘導先の状況を理解し、遠隔操作で遠隔地の視覚情報入出力装置210および聴覚情報入出力装置211に遠隔誘導に必要な情報を提示したり、遠隔地の触覚情報入出力装置212および力覚情報入出力装置213を制御することで、遠隔地にいる被誘導ユーザを正しく目的地まで遠隔誘導することができる。この誘導方法は、視覚障害者、聴覚障害者や、ボケ老人、幼児、あるいは観光客等の誘導などに適している。インターネットに接続されているサーバ(図示しない)にアップロードされたリアルタイムな各種情報などを本発明のハプティックナビで逐次モニタ・検索してダウンロードし、例えばあらたな道路や橋、地下道、鉄道等が開通した、道路工事などである道路が通行止めになっている、お祭りなどのイベントである道路が夕刻まで非常に混雑しているなどの日々変化する、あるいは時々刻々変化する最新情報も適切に反映することができる。同様なことはナビゲーションに関わるアプリケーション・プログラムや機能についても最新版に更新することができる。
【0026】
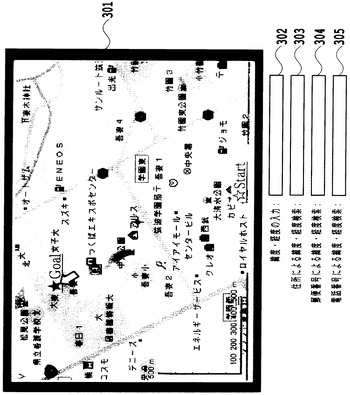
図3は、図1の目的地入力装置102を用いた目的地の位置情報の入力方法を示す。上記の視覚情報入出力装置110のタッチパネルと一体のディスプレイ(図示しない)に表示された地図画面301上の目的地を、マウス(図示しない)でクリックするか、ペン(図示しない)や指でタッチすることにより目的地(星印と白抜きの矢印で示す)が選択され、目的地の対応する緯度・経度の位置情報が地図地理情報記憶装置105から読み出される。また、視覚情報入出力装置110に表示された「経度・緯度の入力」欄302、「住所による緯度・経度検索」欄303、「郵便番号による緯度・経度検索」欄304、「電話番号による緯度・経度検索」欄305を用いて、位置情報を、後述の図5に示すような外部入手出力装置104や操作キー(図示しない)から入力することもできる。以上の検索内容を聴覚IF902の音声認識を用いて入力することも可能である。
【0027】
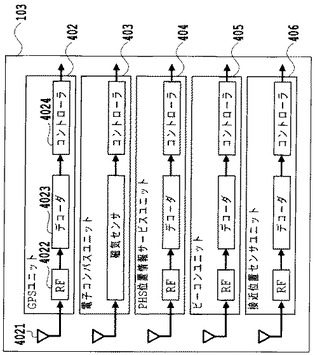
図4は、図1の位置・方位測定装置103を用いて位置・方位情報を測定する方法を示す。位置・方位測定装置103は、GPSユニット402、電子コンパスユニット403、PHS(Personal Handyphone System)位置情報サービスユニット404、ビーコンユニット405、近接位置センサユニット406から構成されている。GPSユニット402は、いわゆるGPS(Global Positioning System)信号を受信し、受信したGPSデータが図1のCPU101に送られる。GPS衛星からの信号はアンテナ4021で受信され、RF(無線周波数増幅器)4022で増幅され、デコーダ4023でデコード(復号化)される。同様に、電子コンパスユニット403では測定された地磁気をもとに得られた方位データがCPU101に送られ、PHS位置情報サービスユニット404でアンテナ基地局との通信から得られた位置データがCPU101に送られ、ビーコンユニット405で得られたいわゆるビーコンデータがCPU101に送られる。近接位置センサユニット406では、電磁波、赤外線、超音波などを用いた位置測定機器で測定された位置データがCPU101に送られる。
【0028】
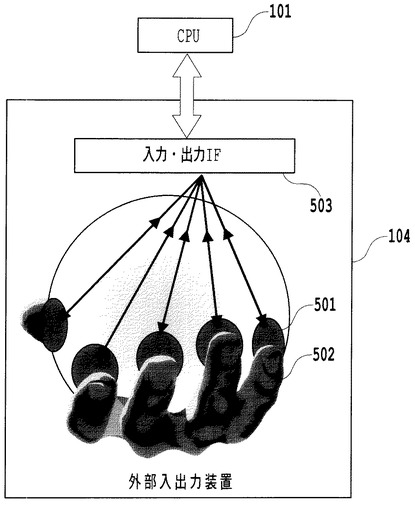
図5は、図1の外部入出力装置104を用いてデータの入力および出力を行う方法を示す。外部入出力装置104の表面の指502が添えられる部分に複数のアクチュエータおよび圧力センサ(例えば、圧電素子)を備えた入出力デバイス501が配置されている。これら入出力デバイス501を指502などで押すことで、視覚情報入出力装置110上のメニュー項目を選択することができる。また、入出力デバイス501は点字ディスプレイなどで使われるペグが取り付けられており、点字情報などを提示することができる。外部入出力装置104として、これらアクチュエータおよび圧力センサなど以外のもの、たとえば電磁スイッチ、マイクロスイッチ、弾性部材等を利用したものを接続しても良い。
【0029】
図6は、図1の地図地理情報記憶装置105を用いて地図および地理情報の読み出し、および書き込み保存を行うときの情報の流れを示す。
地図情報ICカード601がセットされると、CPU101を通じて地図地理情報記憶装置105に地図地理情報が記憶され、記憶された地図地理情報はその後、CPU101を介して呼び出され、視覚情報入出力装置110等に出力されることができる。
【0030】
目的地入力装置102から目的地が入力されると、CPU101は地図地理情報記憶装置105から目的地を含む地図を視覚情報入出力装置110に表示し、地図地理情報記憶装置105から目的地設定に関連する参考情報があればそれを読み出して、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。
【0031】
その後、位置・方位測定装置103で現在位置・方位が入力されると、CPU101はルート検索装置106に制御を渡し、ルート検索装置106はメモリ108に格納してある目的地の位置情報とその入力された位置・方位情報とを地図地理情報記憶装置105に格納されている地図地理情報に照らし合わせ、外部入出力装置104からユーザに入力させた最短時間、最短距離、最低料金、歩行スピードなどの評価基準を基に最適ルートの候補を検索し、検索した結果を最適ルートの候補をCPU101に報告する。CPU101は報告された最適ルートの候補を視覚情報入力出力装置110に表示すると共に、その候補情報を聴覚情報入出力装置111、触覚情報入出力装置112の少なくともいずれか一つ、必要ならば力覚情報入出力装置113にも出力する。
【0032】
最適ルートの候補が外部入出力装置104を通じてユーザにより選定されると、CPU101は選定されたルートを視覚情報入出力装置110の表示図面上に太線、フラッシュなどで強調表示すると共に、そのルートについての参考情報を地図地理情報記憶装置105から読み出して、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。
【0033】
ユーザが移動して、位置・方位測定装置103から入力する現在位置・方位が変わるに従い、逐次、CPU101は視覚情報入力出力装置110の表示図面上のルートの強調表示上の現在位置を移動すると共に、ルート検索装置106が目的地の位置情報と最適ルートの位置・方位情報と現在位置の位置・方位情報とからユーザが現在進むべき進行方向(即ち、誘導方向)と目的地までの距離、および最適な歩行スピードとを算出し、その算出結果をCPU101が視覚情報入力出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。歩行スピードは、振動センサで測定された歩くピッチと前記位置情報から求まる移動速度から歩幅を推定し、その歩幅で所要時間で目的地に到達できる歩行ピッチを推定して、電車などの乗換えを考慮した最適な目標歩行スピード、今の歩行スピード、不足スピードの少なくともいずれかが上記入出力装置に出力される。同時に、CPU101は地図地理情報記憶装置105からユーザの誘導に役立つ参考情報があればそれを読み出して、読み出した参考情報を視覚情報入力出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか一つに出力する。
【0034】
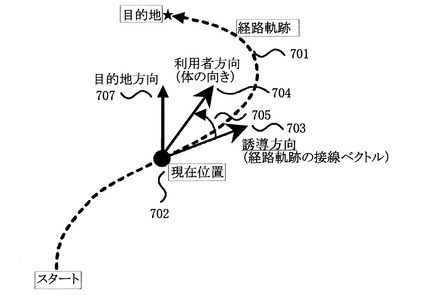
図7は、図1のルート検索装置106を用いて目的地までのルート検索および誘導情報の計算方法を示す。目的地入力装置102から入力した目的地情報および位置・方位測定装置103から入力する位置情報・方位情報、および地図地理情報記憶装置105から読み出される地図・地理情報をもとに、ルート検索装置106において、最適なルート候補が計算・検索される。
【0035】
最適なルート候補からユーザにより所望のルートが選択され、その選択されたルートの経路軌跡701上の現在位置702における接線ベクトル703および法線ベクトルが、ルート検索装置106において、微分や差分などによって求められる。接線ベクトル703はその地点での進行方向を示しており、また、法線ベクトル(図示しない)の反対のベクトルがカーブを曲がるための求心力、つまり、物体の進行方向を力学的に修正するために必要な力ベクトルを意味している。そのため、人を誘導するために必要な方位情報は、人間の感覚特性を考慮して、この接線ベクトルおよび法線ベクトルから算出される。
【0036】

【0037】
さらに、ルート検索装置106において、電子コンパスユニット403などから求められたユーザの体の向き704と接線ベクトル703および法線ベクトルが比較されて、それによりユーザの体の向きに対する誘導すべき角度705が求められる。
【0038】
人は、車とは異なり、装置で決定された経路をなぞるように歩くことはなく、路上の障害物や人を避けたり、目を引くものには近づいたりしながら目的地を目指す。つまり、ユーザは、目的地に向かって、カーナビ用およびヒューマンナビ用の電子地図で探索された経路以外を歩くことも行うため、目的地の大まかな方向706が提示されるだけでも十分に利用価値があると考えられる。
【0039】
目的地までの距離情報も図1の力覚感覚入出力装置113の力覚感覚の強度に関連付けることができる。例えば、音源に近づけば音量が大きくなるように、目的地に近づけば力覚感覚の強度が大きくなる提示の仕方や、反対に、目的地を起点にしてゴムを伸ばした時のように目的地から遠くなれば強度が大きくなるという提示の仕方がある。この2通りのやり方は、それぞれに一長一短があり、前者の場合は、犬が臭いを頼りに探索するように自然法則に合致しているが、遠くに離れて目視が難しい時ほど力覚強度が弱くなり、迷いやすいという問題点もあるが、例えば、力覚感覚出力の最大強度および最小強度を予め設定し、力覚感覚出力が最大強度を超えないように、かつまた最小強度よりも小さくならないように制御することで、効果的な提示も可能である。また、距離に依存させず一定の力覚強度を提示する方法もある。
【0040】
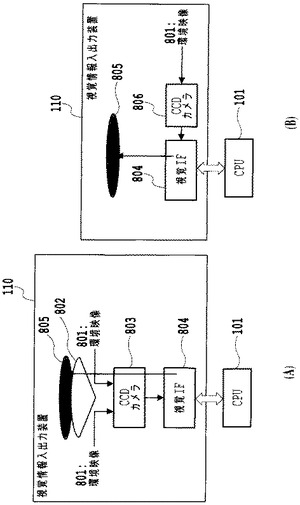
図8は、図1の視覚情報入出力装置110を用いたナビゲーション情報の提示方法および街並みなどの環境映像を記録する方法を示す。図8の(A)は、視覚情報入出力装置110の全方位型の環境映像の記録方法の一構成例を示し、同図に示すように、360度視野角の環境映像801が液晶ディスプレイ805の例えば裏面等に取り付けた円錐形反射鏡802を介してCCDカメラ803で読み込まれる。読み込まれた環境映像のデータは、視覚IF(インターフェース装置)804を介してCPU101に送られて利用されたり、図1の外部記憶装置109に記録される。また、ナビゲーション用の地図301(図3参照)および情報が液晶ディスプレイ805に提示される。
【0041】
図8の(B)は、視覚情報入出力装置110の単方位型の環境映像の記録方法の一構成例を示し、上記の円錐形反射鏡802とCCDカメラ803の代わりに、単一のCCDカメラ806に置換した構成のものである。この場合は、一方向の環境映像がCCDカメラ806により読み込まれ、読み込まれた環境映像のデータは、上記と同様に、視覚IF804を介してCPU101に送られて利用されたり、外部記憶装置109に記録される。
【0042】
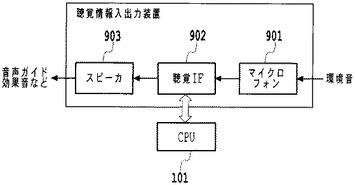
図9は、図1の聴覚情報入出力装置111を用いてナビゲーション用音声ガイドおよび報知音・警告音などの音響情報を提示する方法および環境音を記録する方法を示す。聴覚情報入出力装置111は、マイクロフォン901、聴覚IF(インターフェース装置)902、スピーカ903を有する。音響および音声ガイドは聴覚IF902で合成され、スピーカ903を介してユーザに提示される。環境音はマイクロフォン901および聴覚IF902を介して、CPU101に送られて利用されたり、外部記憶装置109に記録される。聴覚IF902の音声認識機能を用いて入力装置にもなる。
【0043】
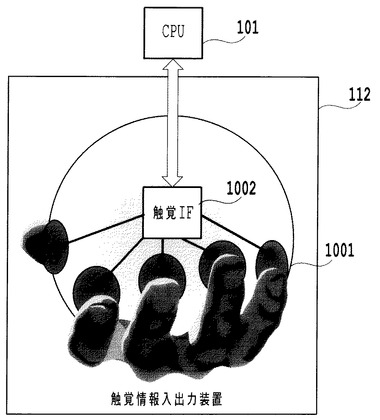
図10は、図1の触覚情報入出力装置112を用いてナビゲーション用点字情報の提示方法を示す。入出力デバイス1001は図5に示した外部入出力装置104の入出力デバイス501と同一物とすることもできる。触覚情報入出力装置112の表面の指が添えられる部分に複数のアクチュエータおよび圧力センサを備えた入出力デバイス1001が配置されている。この入出力デバイス1001は点字ディスプレイなどで使われるペグが取り付けられており、CPU101から送られてきたナビゲーション用情報が触覚IF(インターフェース装置)1002を介して駆動力に変換されて入出力デバイス1001に送られ、点字による文字・シンボル・図形を含む点字情報などの触覚情報によって提示することができる。
【0044】
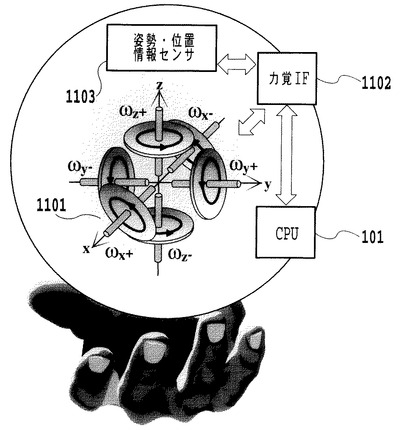
図11は、図1の力覚情報入出力装置113を用いてナビゲーション用力覚情報を提示する方法を示す。力覚情報の提示には、空間に配置・固定された複数個のジャイロモータ1101を力覚IF(インターフェース装置)1102を介して各ジャイロモータを独立に駆動制御することで、任意の方向・大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させることができる。この時、複数のジャイロモータ1101はx、y、z系の直交座標に固定される方が効率的である。力覚情報入出力装置113の姿勢・位置情報はその内部の姿勢・位置情報センサ1103によって測定され、力覚情報入出力装置113自身の動きによって発生する擾乱トルクがCPU101によって計算され、力覚IF1102を介して擾乱トルクがキャンセルするように複数のジャイロモータ1101が制御される。姿勢・位置情報センサ1103には歩くピッチを測定するための振動センサ(図示しない)が含まれる。
【0045】
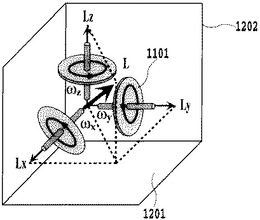
図12は、力覚情報入出力装置113のトルク発生手段として、3個のジャイロモータ1101を利用したデバイス1201を示す。x軸、y軸、z軸に固定された3個の回転子の回転数 ωx、ωy、ωz を独立に制御して、それぞれの回転子が発生する角運動量を合成することで、任意の方向に角運動量ベクトルを発生させる。そして、モータを加減速させた時に伴う角運動量の変化によって発生するトルクの反作用として外部にトルクを取り出す。
【0046】
【0047】
ここで、x、y、z軸方向の角速度の比ωx:ωy:ωzを変えることで任意の方向に角運動量ベクトルの発生方向を制御することができる。この制御方法は制御が容易であり、変化に富んだ3次元力覚感覚を提示できる利点がある。
【0048】
このように、3個のジャイロモータ1101を利用したデバイス1201は、3次元の任意の方向を指し示すことができ、これにより高さ方向の情報が提示することができので、前述のように、地図上では同じ位置で表わされる路面を歩くことと、陸橋・歩道橋を歩くこと、地下を歩くこと、とを区別して誘導することができる利点を有する。
【0049】
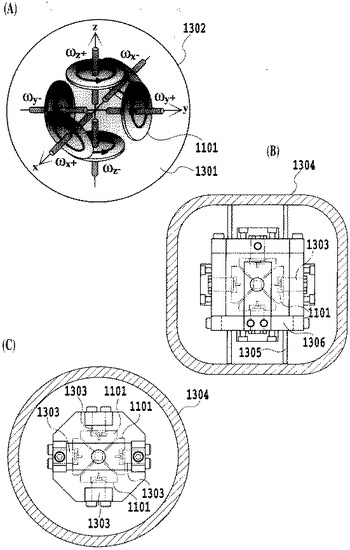
図13は、力覚情報入出力装置113のトルク発生手段として、3組のツイン・ジャイロモータ1101を利用した力覚情報提示デバイス1301を示す。図13の(A)はその力覚情報提示デバイス1301の構成の原理を示す模式図であり、図13の(B)と(C)は実際に作成したデバイス1301の詳細な構成を示し、同図(B)はモータ固定用のフレーム1302に相当するハウジング(筐体)1304のみを断面の切り欠きで示した正面図、同図(C)はその平面図である。1303はジャイロモータ1101の電動モータ部分であり、1305は支持部材、1306は指示枠材である。フレーム1302は例えば円筒形、あるいは球形に形成され、ユーザの手に握られる。
【0050】
図12の例では3個のモータ1101が同図に示すようにねじれの位置に配置させていたが、質量バランスや慣性モーメントの向上を図るために、図13に示すように慣性質量部分を重心近くで対峙させた3組のツイン・ジャイロモータ方式のデバイスを本発明者らは考え出した。また、モータ固定用のフレーム1302、1304の形状も、フレーム自体の慣性モーメントが小さくなるように、図12に示すような立方体形状1202から点対称構造である球形に近づけた。慣性質量を重心に集中させることで、人の動きで生じる余計な慣性力の低減を図っている。このツイン・ジャイロモータは、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを電磁ブレーキなどによって急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる。
【0051】
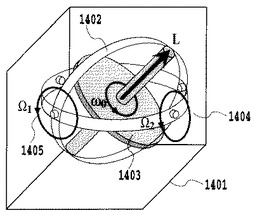
図14は、力覚情報入出力装置113のトルク発生手段として、ジンバル構造1402を用いたデバイス1401を示す。ジャイロスコープのようにジンバル構造1402を用いて角速度ω0で回転する回転子1403の姿勢を2つのジンバル軸1404、1405の周りに回転角Ω1、Ω2で制御する。この構成では、大きな1つのジャイロモータを使用するので、図12および図13に示した構成に比べて比較的大きなトルクを発生させることができるが、構造が複雑になったり、力学的強度が低下したり、提示できるトルクに制限がある。
【0052】
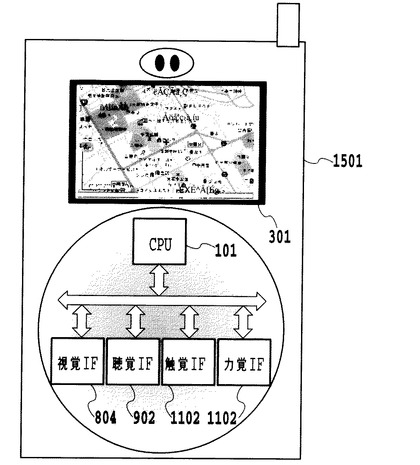
図15と図16は、図1の通信装置107を用いたハプティックナビ100の利用形態を示す。ハプティックナビ100の第1の利用形態としては、図15に示すように、GPS受信機、電子コンパス、および地図地理情報が内蔵された携帯電話機、PHS電話機、およびPDAなどのモバイル機器にハプティックナビ100を内蔵させた一体型モバイル機器1501が挙げられる。
【0053】
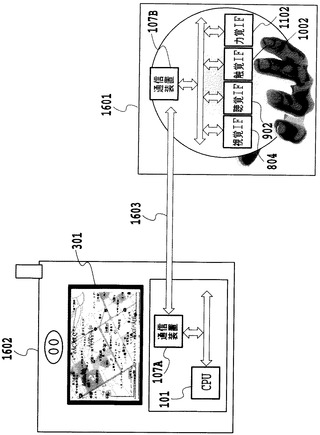
ハプティックナビ100の第2の利用の形態としては、図16に示すように、GPS受信機、電子コンパス、および地図地理情報が内蔵された携帯電話機、PHS電話機、およびPDAなどのモバイル機器1602と、それとは別個の1つのケースに納めたハプティックナビ100の少なくとも入出力装置部分1601とを、通信装置107A、107Bを介して電波、赤外線、超音波、ケーブル、コネクタなどの伝送手段で接続する別体型の形態が挙げられる。
【0054】
ここでは、第1の利用形態である一体型モバイル機器1501が扱いやすく望ましいが、力覚情報入出力が内蔵されたデバイス自身の重量が増えると力覚情報を提示した時のトルクに対する感覚が低下するので、第2の利用形態である分離型デバイス1601も効果的である。
【0055】
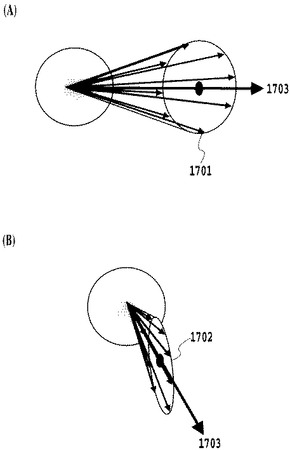
図17は、図1の力覚情報入出力装置113を用いて力覚情報を提示する方法およびその制御方法の1例を示す。角運動量ベクトルを図17の(A)に示すように円軌道1701をトレースするように変化させ、また、図17の(B)に示すように、楕円軌道1702をトレースするように変化させることで目的地の方向1703や誘導すべき方向や知りたい方位を提示することができる。ここで、単振動軌道は楕円軌道1702に含まれる。
【0056】
(他の実施の形態)
以上、本発明の実施形態を詳述したが、本発明は、前述した実施形態の機能を実現するソフトウエアのプログラムを、システム或いは装置に直接或いは遠隔から供給し、そのシステム或いは装置のコンピュータがその供給されたプログラムを読み出して実行することによっても達成される場合を含む。プログラムを供給するための記録媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、MO、CD−ROM、CD−R、CD−RW、磁気テープ、不揮発性のメモリカード(ICメモリカード)、ROM、DVD(DVD−ROM、DVD−R)などがある。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施形態の力覚型ヒューマンナビゲーションシステム(ハプティックナビ)の概略構成を示すブロック図である。
【図2】2つ以上のハプティックナビ間の通信方法を説明するブロック図である。
【図3】図1の目的地入力装置を用いて目的地の位置情報を入力する方法を説明する平面図である。
【図4】位置・方位情報を測定する図1の位置・方位測定装置の構成例を示すブロック図である。
【図5】図1の外部入出力装置を用いてデータの入力および出力を行う方法を説明する概念図である。
【図6】図1の地図地理情報記憶装置を用いて地図および地理情報の読み出し、および書き込み保存を行うときの情報の流れを示すブロック図である。
【図7】図1のルート検索装置を用いて目的地までのルート検索および誘導情報の計算を行う方法を説明する概念図である。
【図8】ナビゲーション情報を提示および街並みなどの環境映像を記録する図1の視覚情報入出力装置の構成例を示すブロック図である。
【図9】ナビゲーション用音響および音声ガイド情報を提示し、環境音を記録する図1の聴覚情報入出力装置の構成例を示すブロック図である。
【図10】図1の触覚情報入出力装置を用いてナビゲーション用点字情報などの触覚情報を提示する方法を説明する概念図である。
【図11】図1の力覚情報入出力装置を用いてナビゲーション用力覚情報を提示する方法を説明する概念図である。
【図12】図1の力覚情報入出力装置のトルク発生手段として、3つのジャイロモータを利用した構成例を示す模式図である。
【図13】図1の力覚情報入出力装置のトルク発生手段として、3組みのジャイロモータを利用した構成例を示し、(A)は模式図、(B)はハウジングのみ切り欠きで示した力覚情報提示デバイスの正面図、(C)は同じく平面図である。
【図14】図1の力覚情報入出力装置のトルク発生手段として、ジンバル構造を利用した構成例を示す模式図である。
【図15】図1のハプティックナビの利用形態として一体型ユニットの一例を示す概念図である。
【図16】図1のハプティックナビの別の利用形態として通信装置を用いた分離型ユニットの一例示す概念図である。
【図17】図1の力覚情報入出力装置を用いて力覚情報を提示する方法および制御する方法を説明する概念図である。
【符号の説明】
【0058】
100 ハプティックナビ(力覚型ヒューマンナビゲーションシステム)
101 CPU
102 目的地入力装置
103 位置・方位測定装置
104 外部入出力装置
105 地図地理情報記憶装置
106 ルート検索装置
107 通信装置
108 メモリ
109 外部記憶装置
110 視覚情報入出力装置
111 聴覚情報入出力装置
112 触覚情報入出力装置
113 力覚情報入出力装置
210 視覚情報入出力装置
211 聴覚情報入出力装置
213 力覚情報入出力装置
301 地図画面
302 経度・緯度の入力表示欄
303 住所による緯度・経度検索表示欄
304 郵便番号による緯度・経度検索表示欄
305 電話番号による緯度・経度検索表示欄
402 GPSユニット
403 電子コンパスユニット
404 PHS位置情報サービスユニット
405 ビーコンユニット
406 近接位置センサユニット
501 入出力デバイス
701 ルートの経路軌跡
702 現在位置
703 接線ベクトル
704 ユーザの体の向き
705 誘導すべき角度
801 環境映像
802 円錐形反射鏡
803 CCDカメラ
804 視覚IF
805 液晶ディスプレイ
806 CCDカメラ
901 マイクロフォン
902 聴覚IF
903 スピーカ
1001 入出力デバイス
1002 触覚IF
1101 ジャイロモータ
1102 力覚IF
1103 姿勢・位置情報センサ
1201 3つのジャイロモータを利用した力覚情報提示デバイス
1301 3組のツイン・ジャイロモータを利用した力覚情報提示デバイス
1401 ジンバル構造を利用した力覚情報提示デバイス
1402 ジンバル構造
1403 角速度ω0で回転する回転子
1404 回転角Ω1のジンバル軸
1405 回転角Ω2のジンバル軸
1501 ハプティックナビがモバイル機器に内蔵された形態のデバイス
1601 ハプティックナビがモバイル機器と分離した形態のデバイス
1701 角運動量ベクトルの円軌道
1702 角運動量ベクトルの楕円軌道
1703 目的地の方向
【技術分野】
【0001】
本発明は、力覚情報提示デバイスを利用して人を目的地に誘導する力覚型ヒューマンナビゲーションシステムに関する。
【背景技術】
【0002】
近年、カーナビ(カーナビゲーションシステム)が普及し、その装置の低価格化・高機能化が進んでいる。運転者は運転を始める前に目的地をカーナビ装置に入力すると、ディスプレイ画面上に現在位置、進行方向が表示され、分岐点・交差点においては詳細図がポップアップされたり、音声ガイドが注意を促してくれるサービスを受けることができる。運転者は運転をしながら瞬間的な判断で次への経路を選んでいくことは大変なストレスであり、そのためカーナビは特に初めての地を訪れる時などは抜群の利便性を発揮してくれる。
【0003】
しかし、運転者は運転時に、ディスプレイ画面上に表示された地名・住所やランドマークを手がかりに、地図と現実空間を照合するなどの「地図を読む能力」が必要とされるため、加齢にともなう視力や空間認識力の低下によって、読地図能力の低下や標識などの見落としが増えてくる。また、複雑な交差点にさしかかった時にはディスプレイ画面に詳細図がポップアップされるが、ディスプレイ画面を見るために、運転中に脇見をすることは好ましいことではない。また、5差路や直交していない道路などでは音声ガイドでは十分に説明できない時がある。
【0004】
最近では、カーナビの利便性が認知されるにともない、GPS(Global Positioning System)モジュールが装備できるPDA−GPSやGPS機能が搭載された携帯電話機が発売されるなど、所謂「ヒューマンナビ」「ウォーキングナビ」「ヒトナビ」などと呼ばれる手の平サイズの携帯型ナビゲーション環境が整いつつある。また、カーナビとPDA(Personal Digital Assistant)間でナビ情報(ナビゲーション情報)を共有してカーナビ・ヒトナビが連携したシームレスな環境も提供されてきている。
【0005】
しかしながら、カーナビの運転時の視認性問題と同様に、携帯型のヒトナビを利用する場合にも、ユーザがチラチラとナビの画面に視線を落としながら見知らぬ街を歩くことは容易なことではない。また、ユーザが店舗のショーウィンドウや仲間との会話を楽しみながら目的地を目指す場合には、視覚情報及び聴覚情報だけに頼ったナビは適当ではない。
【0006】
これらの問題を解決するために、視覚や音声によることなくルート案内を行うナビゲーション装置が提案されてきている。例えば、運転中に左折または右折すべき交差点を振動手段によって知らせる装置(特許文献1)や、右折すべき場所でハンドルに右回転の衝撃を与えたり、左右に配置された振動手段のうち右側の振動手段のみを振動させて右折を知らせたりする装置(特許文献2)が提案されている。また、前後左右の4つに可動ペグを配置し、進行方向に対応した可動ペグを上昇させる方向指示キューを備えた触覚方向指示装置(特許文献3)も提案されている。しかし、これらは歩行時の使用には適当ではなく、触覚感覚を用いた方向指示装置は方向分解能が低く、直感的に進行すべき方向が理解し難い。
【0007】
ヒューマンナビゲーションシステムでは、携帯が可能であり、人が歩きながら使用するためにも小型で非接地型が望ましく、方向を指示するには触覚感覚を利用するよりもトルクなどの力覚感覚を用いた方が直感的で理解しやすい。非接地型の力覚情報提示デバイスとしては、ジャイロモーメントとジンバル構造を用いたトルク提示装置が開発され、これと赤外線距離センサを組み合わせた領域提示システムによってバーチャルな壁を知覚させることで人を誘導する方法が提案されている(非特許文献1)。しかし、ジンバル構造では提示できるトルク方向が制限されており、また、構造が複雑になり制御が煩雑となる問題点もある。
【0008】
これに対して、3軸直交座標に配置された3つのジャイロモータの回転を独立に制御することで任意の方向・大きさにトルクを呈示することができる非接地・可搬型の力覚情報提示デバイス(非特許文献2)が提案されている。3つのジャイロモータによって発生された角運動量合成ベクトルを制御することでトルクを発生させているため、構造が比較的に簡単であり、制御も容易である。しかし、質量および慣性モーメントのバランス、人の自然な動きによって発生する擾乱トルクが解決すべき点となっている。
【0009】
【特許文献1】特開平11−160087号公報
【特許文献2】特開平09−133545号公報
【特許文献3】特開2000−352521号公報
【非特許文献1】吉江 将之、矢野博明、岩田 洋夫、「ジャイロモーメントを用いた非設置型力覚提示装置の開発」、ヒューマンインタフェース学会研究報告集、vol.3, No.5,pp. 25-30 (2000)
【非特許文献2】田中洋吉、酒井勝隆、河野優香、福井幸男、山下樹里、中村則雄、“Mobile Torque Display andHaptic Characteristics of Human Palm”, INTERNATIONAL CONFERENCE ON ARTIFICIALREALITY AND TELEXISTENCE, pp.115-120(2001/12)
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述のように、運転時にカーナビの視認性および音声ガイドの理解度が問題であるのと同様に、携帯型のヒューマンナビゲーションシステムを利用する場合にも、チラチラとナビの画面に視線を落としながら見知らぬ街を歩くことは容易なことではなく、また、店舗のショーウィンドウや仲間との会話を楽しみながら目的地を目指す場合には視覚情報及び聴覚情報だけに頼ったナビは適当ではない。
【0011】
そこで、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、触覚・力覚感覚などを利用して進行すべき方向を直感的に理解しやすい形で提示することが必要である。
【0012】
本発明の目的は、上述のような従来技術の課題に鑑み、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、力覚感覚を利用して進行すべき方向を直感的に理解しやすい形で提示する力覚型ヒューマンナビゲーションシステムを提供することにある。
【課題を解決するための手段】
【0013】
上記目的を達成するため、本発明のヒューマンナビゲーションシステムは、ユーザが目的地の位置情報を入力するための目的地入力手段と、現在位置を測位する位置及び方位測定手段と、時刻表と乗り換え情報、及び地図地理情報を予め格納している地図地理情報記憶手段と、前記目的地入力手段から得られる前記目的地の位置情報と前記位置及び方位測定手段から得られる前記現在位置の位置情報とを前記地図地理情報記憶手段に格納されている前記地図地理情報に照らし合わせ、評価基準を基に最適ルートを検索するルート検索手段と、前記最適ルートの位置及び方位情報と前記現在位置の位置及び方位情報とからユーザが現在進むべき進行方向を算出する演算手段と、前記演算手段で算出された方向の情報に応じてその方向に向かう力をユーザに対し提示することで前記目的地までユーザを誘導する力覚情報出力手段と、を有する。前記力覚情報出力手段は、複数個のジャイロモータ、もしくは重心近くで対峙させた複数組のツイン・ジャイロモータ、もしくはジンバル構造のジャイロモータを独立に制御することで、任意の方向及び大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させる。前記力覚情報出力手段は、一対のツイン・ジャイロモータを、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる。
【発明の効果】
【0014】
以上説明したように,本発明によれば、ディスプレイや音声ガイドによる視覚・聴覚情報に加えて、力覚感覚を利用して進行すべき方向を直感的に理解しやすい形で提示する力覚型ヒューマンナビゲーションシステムが実現できる。
【0015】
よって、本発明のヒューマンナビゲーションシステムを用いれば、次の効果が得られる。
(1)霧の中や暗闇などの視界が悪い場所でもナビゲーションシステムの利用が効果的になる。
(2)森林・原野などのランドマークがない場所でもナビゲーションシステムの利用が効果的になる。
(3)地震によってビルなどが倒壊した場合の災害時においても有効である。
(4)更に、視覚情報提示装置・聴覚情報提示装置・触覚情報提示装置・力覚情報提示装置の少なくともいずれか一つとそれ以外の装置群をワイヤレスに接続することで装着感・操作性を向上させることができる。
【0016】
このように、本発明のヒューマンナビゲーションシステムは、視覚障害者、聴覚障害者および晴眼者にも効果的な誘導デバイスである。また、本発明のヒューマンナビゲーションシステムは、人を目的地に誘導する他に、ロボットの誘導およびカーナビとしても利用することができる。
【0017】
また、ヒューマンナビゲーションシステムで用いる本発明の力覚情報提示デバイスとしては、以下の利点がある。
(a)制御方式として、複数のジャイロモータを独立に制御することで、任意の方向・大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させる方法を用いているため、制御が容易であり、変化に富んだ3次元力覚感覚を提示できる。
(b)また、慣性質量部分を重心近くで対峙させた3組のツイン・ジャイロモータ方式を用いたり、モータ固定用のフレーム形状を点対称構造である球形に近づけることで、質量バランスや慣性モーメントが向上している。慣性質量を重心に集中させることで、人の動きで生じる余計な慣性力の低減が図られている。
(c)ジンバル構造を用いた場合には、ジンバル構造自身が余計な慣性モーメントを持ち擾乱トルクを発生させる。また、ジンバルの可動部分の構造が煩雑となる。これに対して、本発明の複数のジャイロモータを固定した方法では、構造が単純となり、力学的に強い強度が得られる。また、小型化した場合にも構造が単純なため加工が容易である。
(d)非接地型のため、従来のように接地用アームやワイヤが不要であり、身体の動きを拘束しない。複数の力覚情報入出力装置が干渉せずに共存できる。ユーザの動作・行動への制限が少なく、小型・携帯性に優れており、屋内・屋外を含む広範囲での使用が可能である。
【発明を実施するための最良の形態】
【0018】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
図1は、本発明の一実施形態における力覚型ヒューマンナビゲーションシステム(以下、ハプティックナビと称する)の概略構成を示す。ハプティックナビ100は、目的地入力装置102により目的地の位置情報がユーザにより入力される。入力された目的地の位置情報は位置・方位測定装置103により測位された現在位置情報と比較され、その比較結果と地図地理情報記憶装置105に予め記憶されている電車・地下鉄・バスなどの時刻表・乗り換え情報、および駅構内や駅ビルなどの立体地図を含む地図地理情報をもとに、ルート検索装置106によって、最短時間、最短距離、最低料金、歩行スピードなどの評価基準に照らし合わせて最適ルートの候補が計算される。
【0019】
デイスプレイと撮像デバイスとを含む視覚情報入出力装置110、スピーカとマイクを含む聴覚情報入出力装置111、もしくは触覚情報出力デバイスと触覚センサを含む触覚情報入出力装置112の少なくともいずれか一つに提示された上記最適ルートの候補から、ユーザにより希望する最適ルートが後述の図5に示すような外部入出力装置104を用いて選択される。選択された最適ルートに関する情報がメモリ108に一時記憶される。
【0020】
ユーザ(すなわち、ハプティックナビ100)の移動に伴った現在位置の更新に伴い、CPU101においてユーザの誘導に関する情報が計算され、それにより得られた誘導情報が、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報提示デバイスと力覚センサとを含む力覚情報入出力装置113の少なくともいずれか一つを介してユーザに提示される。ユーザは提示されたこれらの誘導情報をもとに目的地に無事にたどり着くことができる。
【0021】
特に、力覚情報入出力装置113は、3次元の任意の方向を指し示すことができ、これにより高さ方向の情報が提示することができ、そのため、地図上では同じ位置で表わされる路面を歩くこと、と陸橋・歩道橋を歩くこと、地下を歩くこと、とを区別して誘導することができる。
【0022】
目的地までのルート途中において、視覚情報入出力装置110のカメラ(図示しない)によって撮像された街並みなどの環境映像、聴覚情報入出力装置111のマイク(図示しない)によってユーザが道を尋ねた時の会話や環境音などが収集され、これら環境映像や環境音などが、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112の少なくともいずれか一つによって提示された情報、および力覚情報入出力装置113によって提示された情報、CPU101の時刻情報、位置・方位測定装置103の位置情報、方位情報、外部入出力装置104の入力情報などと一緒に、メモリカード(図示しない)のような外部記憶装置109に誘導記録情報として記録される。外部記憶装置109に記録された誘導記録情報は、目的地到着後に、通信装置107を介してインターネットに接続された個人のホームサーバなどに自動的に転送・保存することもできる。
【0023】
外部記憶装置109に記録された情報は、ルート途中でも目的地到着後でも、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つを介して参照することができる。
【0024】
通信装置107は、図2で後述するように、遠隔地にある他のハプティックナビとインターネットのような通信回線を介して情報およびデータ交換を行う際に使用される。例えば、目的地の情報を遠隔のハプティックナビから入力したり、外部記憶装置109に逐次記録されている誘導記録情報を通信装置107を介して遠隔地のハプティックナビの視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つで参照したりすることができる。また、遠隔地のハプティックナビの視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、および力覚情報入出力装置113の少なくともいずれか一つを介して遠隔地にいる被誘導対象者を適確に誘導することもできる。
【0025】
図2は、2つ以上のハプティックナビ間の通信方法を示す。通信装置107、207と通信回線220を介して、複数のハプティックナビ100、200間で情報およびデータ交換が可能である。通信装置107、207と通信回線220を通じて、遠隔地にあるハプティックナビ200の視覚情報入出力装置210および聴覚情報入出力装置211により収集した遠隔地の街並みの映像や環境音を、通信相手のハプティックナビ100の視覚情報入出力装置110および聴覚情報入出力装置111でモニタしたり、聴覚情報入出力装置111と211を介して遠隔地にいるユーザと音声会話をすることで遠隔地の誘導先の状況を理解し、遠隔操作で遠隔地の視覚情報入出力装置210および聴覚情報入出力装置211に遠隔誘導に必要な情報を提示したり、遠隔地の触覚情報入出力装置212および力覚情報入出力装置213を制御することで、遠隔地にいる被誘導ユーザを正しく目的地まで遠隔誘導することができる。この誘導方法は、視覚障害者、聴覚障害者や、ボケ老人、幼児、あるいは観光客等の誘導などに適している。インターネットに接続されているサーバ(図示しない)にアップロードされたリアルタイムな各種情報などを本発明のハプティックナビで逐次モニタ・検索してダウンロードし、例えばあらたな道路や橋、地下道、鉄道等が開通した、道路工事などである道路が通行止めになっている、お祭りなどのイベントである道路が夕刻まで非常に混雑しているなどの日々変化する、あるいは時々刻々変化する最新情報も適切に反映することができる。同様なことはナビゲーションに関わるアプリケーション・プログラムや機能についても最新版に更新することができる。
【0026】
図3は、図1の目的地入力装置102を用いた目的地の位置情報の入力方法を示す。上記の視覚情報入出力装置110のタッチパネルと一体のディスプレイ(図示しない)に表示された地図画面301上の目的地を、マウス(図示しない)でクリックするか、ペン(図示しない)や指でタッチすることにより目的地(星印と白抜きの矢印で示す)が選択され、目的地の対応する緯度・経度の位置情報が地図地理情報記憶装置105から読み出される。また、視覚情報入出力装置110に表示された「経度・緯度の入力」欄302、「住所による緯度・経度検索」欄303、「郵便番号による緯度・経度検索」欄304、「電話番号による緯度・経度検索」欄305を用いて、位置情報を、後述の図5に示すような外部入手出力装置104や操作キー(図示しない)から入力することもできる。以上の検索内容を聴覚IF902の音声認識を用いて入力することも可能である。
【0027】
図4は、図1の位置・方位測定装置103を用いて位置・方位情報を測定する方法を示す。位置・方位測定装置103は、GPSユニット402、電子コンパスユニット403、PHS(Personal Handyphone System)位置情報サービスユニット404、ビーコンユニット405、近接位置センサユニット406から構成されている。GPSユニット402は、いわゆるGPS(Global Positioning System)信号を受信し、受信したGPSデータが図1のCPU101に送られる。GPS衛星からの信号はアンテナ4021で受信され、RF(無線周波数増幅器)4022で増幅され、デコーダ4023でデコード(復号化)される。同様に、電子コンパスユニット403では測定された地磁気をもとに得られた方位データがCPU101に送られ、PHS位置情報サービスユニット404でアンテナ基地局との通信から得られた位置データがCPU101に送られ、ビーコンユニット405で得られたいわゆるビーコンデータがCPU101に送られる。近接位置センサユニット406では、電磁波、赤外線、超音波などを用いた位置測定機器で測定された位置データがCPU101に送られる。
【0028】
図5は、図1の外部入出力装置104を用いてデータの入力および出力を行う方法を示す。外部入出力装置104の表面の指502が添えられる部分に複数のアクチュエータおよび圧力センサ(例えば、圧電素子)を備えた入出力デバイス501が配置されている。これら入出力デバイス501を指502などで押すことで、視覚情報入出力装置110上のメニュー項目を選択することができる。また、入出力デバイス501は点字ディスプレイなどで使われるペグが取り付けられており、点字情報などを提示することができる。外部入出力装置104として、これらアクチュエータおよび圧力センサなど以外のもの、たとえば電磁スイッチ、マイクロスイッチ、弾性部材等を利用したものを接続しても良い。
【0029】
図6は、図1の地図地理情報記憶装置105を用いて地図および地理情報の読み出し、および書き込み保存を行うときの情報の流れを示す。
地図情報ICカード601がセットされると、CPU101を通じて地図地理情報記憶装置105に地図地理情報が記憶され、記憶された地図地理情報はその後、CPU101を介して呼び出され、視覚情報入出力装置110等に出力されることができる。
【0030】
目的地入力装置102から目的地が入力されると、CPU101は地図地理情報記憶装置105から目的地を含む地図を視覚情報入出力装置110に表示し、地図地理情報記憶装置105から目的地設定に関連する参考情報があればそれを読み出して、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。
【0031】
その後、位置・方位測定装置103で現在位置・方位が入力されると、CPU101はルート検索装置106に制御を渡し、ルート検索装置106はメモリ108に格納してある目的地の位置情報とその入力された位置・方位情報とを地図地理情報記憶装置105に格納されている地図地理情報に照らし合わせ、外部入出力装置104からユーザに入力させた最短時間、最短距離、最低料金、歩行スピードなどの評価基準を基に最適ルートの候補を検索し、検索した結果を最適ルートの候補をCPU101に報告する。CPU101は報告された最適ルートの候補を視覚情報入力出力装置110に表示すると共に、その候補情報を聴覚情報入出力装置111、触覚情報入出力装置112の少なくともいずれか一つ、必要ならば力覚情報入出力装置113にも出力する。
【0032】
最適ルートの候補が外部入出力装置104を通じてユーザにより選定されると、CPU101は選定されたルートを視覚情報入出力装置110の表示図面上に太線、フラッシュなどで強調表示すると共に、そのルートについての参考情報を地図地理情報記憶装置105から読み出して、視覚情報入出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。
【0033】
ユーザが移動して、位置・方位測定装置103から入力する現在位置・方位が変わるに従い、逐次、CPU101は視覚情報入力出力装置110の表示図面上のルートの強調表示上の現在位置を移動すると共に、ルート検索装置106が目的地の位置情報と最適ルートの位置・方位情報と現在位置の位置・方位情報とからユーザが現在進むべき進行方向(即ち、誘導方向)と目的地までの距離、および最適な歩行スピードとを算出し、その算出結果をCPU101が視覚情報入力出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか1つに出力する。歩行スピードは、振動センサで測定された歩くピッチと前記位置情報から求まる移動速度から歩幅を推定し、その歩幅で所要時間で目的地に到達できる歩行ピッチを推定して、電車などの乗換えを考慮した最適な目標歩行スピード、今の歩行スピード、不足スピードの少なくともいずれかが上記入出力装置に出力される。同時に、CPU101は地図地理情報記憶装置105からユーザの誘導に役立つ参考情報があればそれを読み出して、読み出した参考情報を視覚情報入力出力装置110、聴覚情報入出力装置111、触覚情報入出力装置112、力覚情報入出力装置113の少なくともいずれか一つに出力する。
【0034】
図7は、図1のルート検索装置106を用いて目的地までのルート検索および誘導情報の計算方法を示す。目的地入力装置102から入力した目的地情報および位置・方位測定装置103から入力する位置情報・方位情報、および地図地理情報記憶装置105から読み出される地図・地理情報をもとに、ルート検索装置106において、最適なルート候補が計算・検索される。
【0035】
最適なルート候補からユーザにより所望のルートが選択され、その選択されたルートの経路軌跡701上の現在位置702における接線ベクトル703および法線ベクトルが、ルート検索装置106において、微分や差分などによって求められる。接線ベクトル703はその地点での進行方向を示しており、また、法線ベクトル(図示しない)の反対のベクトルがカーブを曲がるための求心力、つまり、物体の進行方向を力学的に修正するために必要な力ベクトルを意味している。そのため、人を誘導するために必要な方位情報は、人間の感覚特性を考慮して、この接線ベクトルおよび法線ベクトルから算出される。
【0036】
【0037】
さらに、ルート検索装置106において、電子コンパスユニット403などから求められたユーザの体の向き704と接線ベクトル703および法線ベクトルが比較されて、それによりユーザの体の向きに対する誘導すべき角度705が求められる。
【0038】
人は、車とは異なり、装置で決定された経路をなぞるように歩くことはなく、路上の障害物や人を避けたり、目を引くものには近づいたりしながら目的地を目指す。つまり、ユーザは、目的地に向かって、カーナビ用およびヒューマンナビ用の電子地図で探索された経路以外を歩くことも行うため、目的地の大まかな方向706が提示されるだけでも十分に利用価値があると考えられる。
【0039】
目的地までの距離情報も図1の力覚感覚入出力装置113の力覚感覚の強度に関連付けることができる。例えば、音源に近づけば音量が大きくなるように、目的地に近づけば力覚感覚の強度が大きくなる提示の仕方や、反対に、目的地を起点にしてゴムを伸ばした時のように目的地から遠くなれば強度が大きくなるという提示の仕方がある。この2通りのやり方は、それぞれに一長一短があり、前者の場合は、犬が臭いを頼りに探索するように自然法則に合致しているが、遠くに離れて目視が難しい時ほど力覚強度が弱くなり、迷いやすいという問題点もあるが、例えば、力覚感覚出力の最大強度および最小強度を予め設定し、力覚感覚出力が最大強度を超えないように、かつまた最小強度よりも小さくならないように制御することで、効果的な提示も可能である。また、距離に依存させず一定の力覚強度を提示する方法もある。
【0040】
図8は、図1の視覚情報入出力装置110を用いたナビゲーション情報の提示方法および街並みなどの環境映像を記録する方法を示す。図8の(A)は、視覚情報入出力装置110の全方位型の環境映像の記録方法の一構成例を示し、同図に示すように、360度視野角の環境映像801が液晶ディスプレイ805の例えば裏面等に取り付けた円錐形反射鏡802を介してCCDカメラ803で読み込まれる。読み込まれた環境映像のデータは、視覚IF(インターフェース装置)804を介してCPU101に送られて利用されたり、図1の外部記憶装置109に記録される。また、ナビゲーション用の地図301(図3参照)および情報が液晶ディスプレイ805に提示される。
【0041】
図8の(B)は、視覚情報入出力装置110の単方位型の環境映像の記録方法の一構成例を示し、上記の円錐形反射鏡802とCCDカメラ803の代わりに、単一のCCDカメラ806に置換した構成のものである。この場合は、一方向の環境映像がCCDカメラ806により読み込まれ、読み込まれた環境映像のデータは、上記と同様に、視覚IF804を介してCPU101に送られて利用されたり、外部記憶装置109に記録される。
【0042】
図9は、図1の聴覚情報入出力装置111を用いてナビゲーション用音声ガイドおよび報知音・警告音などの音響情報を提示する方法および環境音を記録する方法を示す。聴覚情報入出力装置111は、マイクロフォン901、聴覚IF(インターフェース装置)902、スピーカ903を有する。音響および音声ガイドは聴覚IF902で合成され、スピーカ903を介してユーザに提示される。環境音はマイクロフォン901および聴覚IF902を介して、CPU101に送られて利用されたり、外部記憶装置109に記録される。聴覚IF902の音声認識機能を用いて入力装置にもなる。
【0043】
図10は、図1の触覚情報入出力装置112を用いてナビゲーション用点字情報の提示方法を示す。入出力デバイス1001は図5に示した外部入出力装置104の入出力デバイス501と同一物とすることもできる。触覚情報入出力装置112の表面の指が添えられる部分に複数のアクチュエータおよび圧力センサを備えた入出力デバイス1001が配置されている。この入出力デバイス1001は点字ディスプレイなどで使われるペグが取り付けられており、CPU101から送られてきたナビゲーション用情報が触覚IF(インターフェース装置)1002を介して駆動力に変換されて入出力デバイス1001に送られ、点字による文字・シンボル・図形を含む点字情報などの触覚情報によって提示することができる。
【0044】
図11は、図1の力覚情報入出力装置113を用いてナビゲーション用力覚情報を提示する方法を示す。力覚情報の提示には、空間に配置・固定された複数個のジャイロモータ1101を力覚IF(インターフェース装置)1102を介して各ジャイロモータを独立に駆動制御することで、任意の方向・大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させることができる。この時、複数のジャイロモータ1101はx、y、z系の直交座標に固定される方が効率的である。力覚情報入出力装置113の姿勢・位置情報はその内部の姿勢・位置情報センサ1103によって測定され、力覚情報入出力装置113自身の動きによって発生する擾乱トルクがCPU101によって計算され、力覚IF1102を介して擾乱トルクがキャンセルするように複数のジャイロモータ1101が制御される。姿勢・位置情報センサ1103には歩くピッチを測定するための振動センサ(図示しない)が含まれる。
【0045】
図12は、力覚情報入出力装置113のトルク発生手段として、3個のジャイロモータ1101を利用したデバイス1201を示す。x軸、y軸、z軸に固定された3個の回転子の回転数 ωx、ωy、ωz を独立に制御して、それぞれの回転子が発生する角運動量を合成することで、任意の方向に角運動量ベクトルを発生させる。そして、モータを加減速させた時に伴う角運動量の変化によって発生するトルクの反作用として外部にトルクを取り出す。
【0046】
【0047】
ここで、x、y、z軸方向の角速度の比ωx:ωy:ωzを変えることで任意の方向に角運動量ベクトルの発生方向を制御することができる。この制御方法は制御が容易であり、変化に富んだ3次元力覚感覚を提示できる利点がある。
【0048】
このように、3個のジャイロモータ1101を利用したデバイス1201は、3次元の任意の方向を指し示すことができ、これにより高さ方向の情報が提示することができので、前述のように、地図上では同じ位置で表わされる路面を歩くことと、陸橋・歩道橋を歩くこと、地下を歩くこと、とを区別して誘導することができる利点を有する。
【0049】
図13は、力覚情報入出力装置113のトルク発生手段として、3組のツイン・ジャイロモータ1101を利用した力覚情報提示デバイス1301を示す。図13の(A)はその力覚情報提示デバイス1301の構成の原理を示す模式図であり、図13の(B)と(C)は実際に作成したデバイス1301の詳細な構成を示し、同図(B)はモータ固定用のフレーム1302に相当するハウジング(筐体)1304のみを断面の切り欠きで示した正面図、同図(C)はその平面図である。1303はジャイロモータ1101の電動モータ部分であり、1305は支持部材、1306は指示枠材である。フレーム1302は例えば円筒形、あるいは球形に形成され、ユーザの手に握られる。
【0050】
図12の例では3個のモータ1101が同図に示すようにねじれの位置に配置させていたが、質量バランスや慣性モーメントの向上を図るために、図13に示すように慣性質量部分を重心近くで対峙させた3組のツイン・ジャイロモータ方式のデバイスを本発明者らは考え出した。また、モータ固定用のフレーム1302、1304の形状も、フレーム自体の慣性モーメントが小さくなるように、図12に示すような立方体形状1202から点対称構造である球形に近づけた。慣性質量を重心に集中させることで、人の動きで生じる余計な慣性力の低減を図っている。このツイン・ジャイロモータは、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを電磁ブレーキなどによって急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる。
【0051】
図14は、力覚情報入出力装置113のトルク発生手段として、ジンバル構造1402を用いたデバイス1401を示す。ジャイロスコープのようにジンバル構造1402を用いて角速度ω0で回転する回転子1403の姿勢を2つのジンバル軸1404、1405の周りに回転角Ω1、Ω2で制御する。この構成では、大きな1つのジャイロモータを使用するので、図12および図13に示した構成に比べて比較的大きなトルクを発生させることができるが、構造が複雑になったり、力学的強度が低下したり、提示できるトルクに制限がある。
【0052】
図15と図16は、図1の通信装置107を用いたハプティックナビ100の利用形態を示す。ハプティックナビ100の第1の利用形態としては、図15に示すように、GPS受信機、電子コンパス、および地図地理情報が内蔵された携帯電話機、PHS電話機、およびPDAなどのモバイル機器にハプティックナビ100を内蔵させた一体型モバイル機器1501が挙げられる。
【0053】
ハプティックナビ100の第2の利用の形態としては、図16に示すように、GPS受信機、電子コンパス、および地図地理情報が内蔵された携帯電話機、PHS電話機、およびPDAなどのモバイル機器1602と、それとは別個の1つのケースに納めたハプティックナビ100の少なくとも入出力装置部分1601とを、通信装置107A、107Bを介して電波、赤外線、超音波、ケーブル、コネクタなどの伝送手段で接続する別体型の形態が挙げられる。
【0054】
ここでは、第1の利用形態である一体型モバイル機器1501が扱いやすく望ましいが、力覚情報入出力が内蔵されたデバイス自身の重量が増えると力覚情報を提示した時のトルクに対する感覚が低下するので、第2の利用形態である分離型デバイス1601も効果的である。
【0055】
図17は、図1の力覚情報入出力装置113を用いて力覚情報を提示する方法およびその制御方法の1例を示す。角運動量ベクトルを図17の(A)に示すように円軌道1701をトレースするように変化させ、また、図17の(B)に示すように、楕円軌道1702をトレースするように変化させることで目的地の方向1703や誘導すべき方向や知りたい方位を提示することができる。ここで、単振動軌道は楕円軌道1702に含まれる。
【0056】
(他の実施の形態)
以上、本発明の実施形態を詳述したが、本発明は、前述した実施形態の機能を実現するソフトウエアのプログラムを、システム或いは装置に直接或いは遠隔から供給し、そのシステム或いは装置のコンピュータがその供給されたプログラムを読み出して実行することによっても達成される場合を含む。プログラムを供給するための記録媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、MO、CD−ROM、CD−R、CD−RW、磁気テープ、不揮発性のメモリカード(ICメモリカード)、ROM、DVD(DVD−ROM、DVD−R)などがある。
【図面の簡単な説明】
【0057】
【図1】本発明の一実施形態の力覚型ヒューマンナビゲーションシステム(ハプティックナビ)の概略構成を示すブロック図である。
【図2】2つ以上のハプティックナビ間の通信方法を説明するブロック図である。
【図3】図1の目的地入力装置を用いて目的地の位置情報を入力する方法を説明する平面図である。
【図4】位置・方位情報を測定する図1の位置・方位測定装置の構成例を示すブロック図である。
【図5】図1の外部入出力装置を用いてデータの入力および出力を行う方法を説明する概念図である。
【図6】図1の地図地理情報記憶装置を用いて地図および地理情報の読み出し、および書き込み保存を行うときの情報の流れを示すブロック図である。
【図7】図1のルート検索装置を用いて目的地までのルート検索および誘導情報の計算を行う方法を説明する概念図である。
【図8】ナビゲーション情報を提示および街並みなどの環境映像を記録する図1の視覚情報入出力装置の構成例を示すブロック図である。
【図9】ナビゲーション用音響および音声ガイド情報を提示し、環境音を記録する図1の聴覚情報入出力装置の構成例を示すブロック図である。
【図10】図1の触覚情報入出力装置を用いてナビゲーション用点字情報などの触覚情報を提示する方法を説明する概念図である。
【図11】図1の力覚情報入出力装置を用いてナビゲーション用力覚情報を提示する方法を説明する概念図である。
【図12】図1の力覚情報入出力装置のトルク発生手段として、3つのジャイロモータを利用した構成例を示す模式図である。
【図13】図1の力覚情報入出力装置のトルク発生手段として、3組みのジャイロモータを利用した構成例を示し、(A)は模式図、(B)はハウジングのみ切り欠きで示した力覚情報提示デバイスの正面図、(C)は同じく平面図である。
【図14】図1の力覚情報入出力装置のトルク発生手段として、ジンバル構造を利用した構成例を示す模式図である。
【図15】図1のハプティックナビの利用形態として一体型ユニットの一例を示す概念図である。
【図16】図1のハプティックナビの別の利用形態として通信装置を用いた分離型ユニットの一例示す概念図である。
【図17】図1の力覚情報入出力装置を用いて力覚情報を提示する方法および制御する方法を説明する概念図である。
【符号の説明】
【0058】
100 ハプティックナビ(力覚型ヒューマンナビゲーションシステム)
101 CPU
102 目的地入力装置
103 位置・方位測定装置
104 外部入出力装置
105 地図地理情報記憶装置
106 ルート検索装置
107 通信装置
108 メモリ
109 外部記憶装置
110 視覚情報入出力装置
111 聴覚情報入出力装置
112 触覚情報入出力装置
113 力覚情報入出力装置
210 視覚情報入出力装置
211 聴覚情報入出力装置
213 力覚情報入出力装置
301 地図画面
302 経度・緯度の入力表示欄
303 住所による緯度・経度検索表示欄
304 郵便番号による緯度・経度検索表示欄
305 電話番号による緯度・経度検索表示欄
402 GPSユニット
403 電子コンパスユニット
404 PHS位置情報サービスユニット
405 ビーコンユニット
406 近接位置センサユニット
501 入出力デバイス
701 ルートの経路軌跡
702 現在位置
703 接線ベクトル
704 ユーザの体の向き
705 誘導すべき角度
801 環境映像
802 円錐形反射鏡
803 CCDカメラ
804 視覚IF
805 液晶ディスプレイ
806 CCDカメラ
901 マイクロフォン
902 聴覚IF
903 スピーカ
1001 入出力デバイス
1002 触覚IF
1101 ジャイロモータ
1102 力覚IF
1103 姿勢・位置情報センサ
1201 3つのジャイロモータを利用した力覚情報提示デバイス
1301 3組のツイン・ジャイロモータを利用した力覚情報提示デバイス
1401 ジンバル構造を利用した力覚情報提示デバイス
1402 ジンバル構造
1403 角速度ω0で回転する回転子
1404 回転角Ω1のジンバル軸
1405 回転角Ω2のジンバル軸
1501 ハプティックナビがモバイル機器に内蔵された形態のデバイス
1601 ハプティックナビがモバイル機器と分離した形態のデバイス
1701 角運動量ベクトルの円軌道
1702 角運動量ベクトルの楕円軌道
1703 目的地の方向
【特許請求の範囲】
【請求項1】
ユーザが目的地の位置情報を入力するための目的地入力手段と、
現在位置を測位する位置及び方位測定手段と、
時刻表と乗り換え情報、及び地図地理情報を予め格納している地図地理情報記憶手段と、
前記目的地入力手段から得られる前記目的地の位置情報と前記位置及び方位測定手段から得られる前記現在位置の位置情報とを前記地図地理情報記憶手段に格納されている前記地図地理情報に照らし合わせ、評価基準を基に最適ルートを検索するルート検索手段と、
前記最適ルートの位置及び方位情報と前記現在位置の位置及び方位情報とからユーザが現在進むべき進行方向を算出する演算手段と、
前記演算手段で算出された方向の情報に応じてその方向に向かう力をユーザに対し提示することで前記目的地までユーザを誘導する力覚情報出力手段と、を有し、
前記力覚情報出力手段は、複数個のジャイロモータ、もしくは重心近くで対峙させた複数組のツイン・ジャイロモータ、もしくはジンバル構造のジャイロモータを独立に制御することで、任意の方向及び大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させることを特徴とするヒューマンナビゲーションシステム。
【請求項2】
前記力覚情報出力手段は、一対のツイン・ジャイロモータを、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる請求項1に記載のヒューマンナビゲーションシステム。
【請求項1】
ユーザが目的地の位置情報を入力するための目的地入力手段と、
現在位置を測位する位置及び方位測定手段と、
時刻表と乗り換え情報、及び地図地理情報を予め格納している地図地理情報記憶手段と、
前記目的地入力手段から得られる前記目的地の位置情報と前記位置及び方位測定手段から得られる前記現在位置の位置情報とを前記地図地理情報記憶手段に格納されている前記地図地理情報に照らし合わせ、評価基準を基に最適ルートを検索するルート検索手段と、
前記最適ルートの位置及び方位情報と前記現在位置の位置及び方位情報とからユーザが現在進むべき進行方向を算出する演算手段と、
前記演算手段で算出された方向の情報に応じてその方向に向かう力をユーザに対し提示することで前記目的地までユーザを誘導する力覚情報出力手段と、を有し、
前記力覚情報出力手段は、複数個のジャイロモータ、もしくは重心近くで対峙させた複数組のツイン・ジャイロモータ、もしくはジンバル構造のジャイロモータを独立に制御することで、任意の方向及び大きさに角運動量ベクトルを合成し、その時間微分によってトルクを発生させることを特徴とするヒューマンナビゲーションシステム。
【請求項2】
前記力覚情報出力手段は、一対のツイン・ジャイロモータを、同一方向、および反対方向に回転させることが可能で、反対方向に回転させることで角運動量の合成が打ち消され、ジャイロモータが回転していても見かけ上は回転していないのと同じ状態になり、トルクを発生させないまま反対方向に高速回転させた状態から片方のジャイロモータだけを急峻な制動をかけることによって大きな角運動量の変化が生じ、大きなトルクを提示することができる請求項1に記載のヒューマンナビゲーションシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2007−248478(P2007−248478A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2007−163580(P2007−163580)
【出願日】平成19年6月21日(2007.6.21)
【分割の表示】特願2002−346686(P2002−346686)の分割
【原出願日】平成14年11月29日(2002.11.29)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成19年6月21日(2007.6.21)
【分割の表示】特願2002−346686(P2002−346686)の分割
【原出願日】平成14年11月29日(2002.11.29)
【出願人】(301021533)独立行政法人産業技術総合研究所 (6,529)
【Fターム(参考)】
[ Back to top ]