
力覚提示装置及びそのポジショニング方法
【課題】ポジショニングを迅速に完了する、力覚提示装置及びそのポジショニング方法を提供する。
【解決手段】力覚提示装置及びそのポジショニング方法は、マイクロプロセッサ30によりモーター23の正方向または逆方向の定速回転を制御し、不等間隔のブロッキング回折格子28を動かして検出器25を通過させ、オン信号またはオフ信号を生成し、タイマー装置31により検出器のオン信号またはオフ信号の時間を測定して、ブロッキング回折格子が通過した角度を計算し、メモリ装置32に保存された絶対角度と照合して、ブロッキング回折格子の絶対角度を決定し、ジョイスティック21のポジショニングを完了する。
【解決手段】力覚提示装置及びそのポジショニング方法は、マイクロプロセッサ30によりモーター23の正方向または逆方向の定速回転を制御し、不等間隔のブロッキング回折格子28を動かして検出器25を通過させ、オン信号またはオフ信号を生成し、タイマー装置31により検出器のオン信号またはオフ信号の時間を測定して、ブロッキング回折格子が通過した角度を計算し、メモリ装置32に保存された絶対角度と照合して、ブロッキング回折格子の絶対角度を決定し、ジョイスティック21のポジショニングを完了する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は力覚提示装置に関し、特に、制御用の力覚提示装置であって、力覚提示装置の起動時にジョイスティックの所在位置のポジショニングを決定する構造及びその方法に関するものである。
【背景技術】
【0002】
力覚提示装置(Force Feedback Device)は主に、複数の異なる制御機能の制御棒、ボタン、またはつまみを統合して1つのジョイスティックとし、かつジョイスティックの移動範囲を複数の制御機能区域に区分して、異なる制御機能区域に異なる力覚提示型態を付与し、ジョイスティックの現在の制御機能を提示して、制御方式と構造を簡略化している。
【0003】
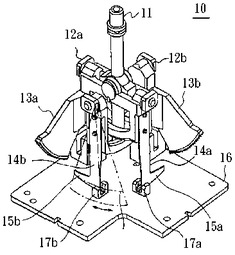
図1に米国で公告されたUS7490530特許案を示す。この先行技術が開示する力覚提示装置10は、ジョイスティック11が2つの次元の回転軸12a、12bを同時に操作し、各次元の回転軸の一端に扇形ギア13a、13bが設置され、それぞれがモーター(図示しない)により駆動され、力覚を提供する。2つの次元の回転軸12a、12bの他端にそれぞれ揺動部材14a、14bが設置され、揺動部材14a、14bのL字形ブロック部15a、15bの長さは、揺動部材14a、14bの揺動角度の半分である。揺動部材14a、14bが揺動するとき、L字形ブロック部15a、15bがそれぞれ基座16上に設置されたフォトインタラプタ17a、17bを通過し、フォトインタラプタ17a、17bを遮断してオフ信号を発生する。逆に、L字形ブロック部15a、15bが通過しないときは、フォトインタラプタ17a、17bが遮断されず、オン信号を発生する。
【0004】
使用者がジョイスティック11をうっかり移動させたり、誤って動かしたりすると力覚提示装置10が起動時にジョイスティック11の停留位置を確定できないため、ポジショニング確認を行う必要がある。力覚提示装置10のポジショニング時は、モーターにより扇形ギア13a、13bを駆動し、回転軸12a、12bを回動させて、揺動部材14a、14bを揺動させ、ジョイスティック11を移動させてポジショニングを行う。揺動角度の半分を占めるL字形ブロック部15a、15bがフォトインタラプタ17a、17bを通過した、またはそれらに進入すると、フォトインタラプタ17a、17bがオン信号またはオフ信号の変化を生じ、ジョイスティック11がちょうど揺動角度の中心に位置していることを確認でき、ポジショニングが完了する。
【0005】
しかしながら、先行技術はL字形ブロック部15a、15bを揺動の中心まで回動させ、フォトインタラプタ17aを通過またはそれらに進入させて、オン信号またはオフ信号の変化を生じさせなければポジショニングを完了できない。揺動角度の半分を占めるL字形ブロック部15a、15bの移動角度が比較的大きいため、ポジショニング完了により長い時間がかかる。モーターがL字形ブロック部15a、15bを駆動したとき誤った方向に回動されると往復回動が必要になるため、ポジショニング完了にさらに時間がかかる。このため、力覚提示装置をオンにした後待つ必要があり、使用者が装置をオンにした後すぐに使用したがる習性を満たすことができず、使用上不便である。
【0006】
このため、力覚提示装置はポジショニングの構造と方法において、解決されるべき問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許公告第7490530号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、揺動部材に不等間隔のブロッキング回折格子を設置し、定速回転モーターを利用して、検出器を遮断または開放する時間の長さを生成し、ポジショニングを迅速に完了する、力覚提示装置及びそのポジショニング方法を提供することにある。
【0009】
本発明の別の目的は、多次元の揺動部材に不等間隔のブロッキング回折格子を設置して、多次元の力覚提示装置のポジショニングに適用する、力覚提示装置及びそのポジショニング方法を提供することにある。
【課題を解決するための手段】
【0010】
前述の発明の目的を達するため、本発明の力覚提示装置は、少なくとも1つの次元の回転軸の中間部に駆動溝が設けられ、ジョイスティックの一端が前記駆動溝に穿通されて、移動可能に力覚提示装置に枢設され、モーターが回転軸の一端を回動させ、回転軸の他端に不等間隔のブロッキング回折格子が設けられた揺動部材が固定され、検出器がブロッキング回折格子のルート上に設置され、ブロッキング回折格子を検出してオン信号またはオフ信号を発生し、メモリ装置にブロッキング回折格子の絶対角度が保存され、マイクロプロセッサがモーターの正方向または逆方向の定速回転を制御して、不等間隔のブロッキング回折格子を動かし、検出器を通過させて、オン信号またはオフ信号を発生させ、タイマー装置によりオン信号またはオフ信号の持続時間を測定し、ブロッキング回折格子が通過した角度を計算して、メモリ装置に保存された絶対角度と照合し、ブロッキング回折格子の絶対角度を決定して、ジョイスティックのポジショニングを完了する。
【0011】
本発明の力覚提示装置のポジショニング方法は、まずモーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器で一定速度で移動させる工程と、検出器のオン/オフ信号の変化発生を検査して、時間の計測を開始する工程と、再度モーターの回転方向を検出し、且つ検出器のオン信号またはオフ信号を検出する工程と、検出器の再度のオン/オフ信号の変化発生を検査して、時間計測を停止する工程と、検出したモーター回転方向、検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合し、ジョイスティックの1次元の位置を取得する工程と、別の次元のモーターを起動して、次の次元のポジショニングを行い、ジョイスティックの各次元のポジショニングを行なって、ポジショニングのプロセスを完了する工程を含む。
【発明の効果】
【0012】
以上のことから、本発明は、先行技術が長い時間をかけてポジショニングを完了させていたことを、迅速に完了することで課題を克服し、さらに多次元の力覚提示装置のポジショニングを実現することができる。
【図面の簡単な説明】
【0013】
【図1】先行技術の力覚提示装置の立体図である。
【図2】本発明の実施例1の力覚提示装置の立体図である。
【図3】本発明の揺動部材の凹部のブロッキング回折格子の構造を示す平面図である。
【図4】本発明の揺動部材の凸部のブロッキング回折格子の構造を示す平面図である。
【図5】本発明のブロッキング回折格子の絶対位置を示す概略図である。
【図6】本発明のブロッキング回折格子の検出を示す概略図である。
【図7】本発明の実施例1の力覚提示装置ポジショニング方法のフローチャートである。
【図8】本発明の実施例2の力覚提示装置の立体図である。
【図9】本発明の実施例2の力覚提示装置ポジショニング方法のフローチャートである。
【発明を実施するための形態】
【0014】
本発明が上述の目的を達するために採用した技術手段及びその効果について、最良の実施例と図面を組み合わせ、以下で説明する。
【実施例1】
【0015】
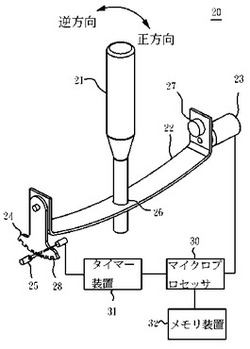
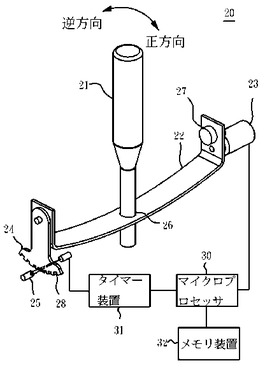
図2、図3、図4、図5を同時に参照する。図2は本発明の実施例1の力覚提示装置、図3及び図4は本発明の揺動部材、図5は本発明のブロッキング回折格子の絶対位置をそれぞれ示す。図2に示すように、本発明の実施例1の力覚提示装置20は一次元形式であり、主に、ジョイスティック21、回転軸22、モーター23、揺動部材24、検出器25を含む。そのうち、ジョイスティック21は一端が回転軸22中間部の駆動溝26に穿通され、移動可能に力覚提示装置20上に枢設される。回転軸22の一端がモーター23に連結され、回転軸22が正方向と逆方向に回動され、あらかじめ定めた角度範囲内で往復揺動される。回転軸22の適切な回動速度を取得するため、モーター23は減速ギアセット27を経由して回転軸22を駆動することができる。
【0016】
揺動部材24は回転軸22の他端に固定され、回転軸22と同期して揺動部材24が回動され、揺動する。揺動部材24の一端に不等間隔のブロッキング回折格子28が設けられ、ブロッキング回折格子28の揺動ルート上に、力覚提示装置20に固定された検出器25が設置され、ブロッキング回折格子28の遮断または開放を検出して、オン信号またはオフ信号を発生する。本実施例の検出器25は、光検出器を例とし、検出器25の投射する光束の遮断または開放を利用してオン信号またはオフ信号を発生するが、これに限定されず、ブロッキング回折格子28の遮断または開放を検出できる検出器であれば、例えば磁気検出器等も適用することができる。このほか、本発明の力覚提示装置20は、マイクロプロセッサ30を含み、モーター23の正方向と逆方向の定速回転を制御・検出し、検出器25のオン/オフ信号の変化を検出するために用いられ、同時にタイマー装置31で検出器25のオン信号またはオフ信号の持続時間を計測する。
【0017】
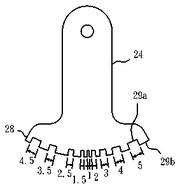
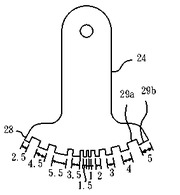
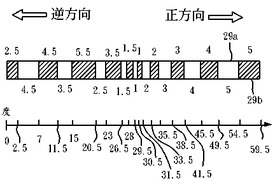
図3に示すように、揺動部材24は一端に一列の凹部29aと凸部29bが交互に間を隔てて設けられ、不等間隔のブロッキング回折格子28が形成される。そのうち、各凹部29aは異なる間隔距離を備え、例えば図4に示すように、異なる間隔距離の凸部29bのように、等間隔または異なる間隔距離の凸部29bに対応する。あらかじめ設定された基準点、例えば揺動部材24の最大揺動角度の一側を基準点0度とし、図5に示すように揺動部材24の凹部29aと凸部29bを順に配列して、座標軸に示すような各凹部29a両側端点の絶対角度を取得することができ、かつブロッキング回折格子28の絶対角度を力覚提示装置20のメモリ装置32に保存する。
【0018】
同時に図2と図6を参照する。図6は本発明のブロッキング回折格子の検出を示す図である。本発明の力覚提示装置20がポジショニングを行うとき、マイクロプロセッサ30がモーター23を制御して一定の回転速度で回転させ、減速ギアセット27を経由して回転軸22の回動を駆動し、同時に揺動部材24を動かして揺動させ、揺動部材24のブロッキング回折格子28を検出器25内で一定速度で移動させる。実例を挙げて説明すると、図6に示すように、起動時に検出器25が投射する光束がブロッキング回折格子28の4.5度の凸部29bに当たると仮定すると、光束が遮断されるため、検出器25はオフ信号(off)を発生する。モーター23の回転方向に従い、光束は矢印に沿って、ブロッキング回折格子28の3.5度の凹部29aに向かって移動する。光束が4.5度の凸部29bを離れて3.5度の凹部29aに進入すると、光束が開放され、検出器25がオン信号(on)を発生し、1回のオン/オフの変化が形成される。マイクロプロセッサ30は検出器25のオン/オフ信号の変化を検出すると、タイマー装置31により検出器25のオン信号持続時間の計測を開始し、かつモーター23の回転方向、例えば正方向回転を検出する。光束が3.5度の凹部29aを離れて5.5度の凸部29bに進入すると、光束が再度遮断され、マイクロプロセッサ30が再度検出器25のオン/オフ信号の変化を検出すると、時間計測が停止される。マイクロプロセッサ30は2回のオン/オフ信号の変化の間の測定時間を利用して、定速で回転するモーター23から、ブロッキング回折格子28が通過した角度を計算し、かつオン信号に基づき、メモリ装置32に保存されたブロッキング回折格子28の絶対角度と照合して、3.5度の凹部29aを取得し、さらにモーター23の正方向回転に基づき、時間計測の終点が3.5度の凹部29aの正方向回転側、即ち絶対角度15度の位置と決定し、ジョイスティック21のポジショニングが完了する。
【0019】
同様の理で、前述においてモーター23の回転方向が逆方向回転と検出されたと仮定すると、時間計測の終点を3.5度の凹部29aの逆方向回転側、即ち絶対角度11.5度の位置と決定することができる。計測したのが検出器25のオフ信号とすると、メモリ装置32に保存されたブロッキング回折格子28の絶対角度と照合して、3.5度の凸部29bを得ることができる。このため、本発明はブロッキング回折格子28中の1つの凹部または凸部の小角度を移動して検出するだけで、迅速にポジショニングを完了できる。
【0020】
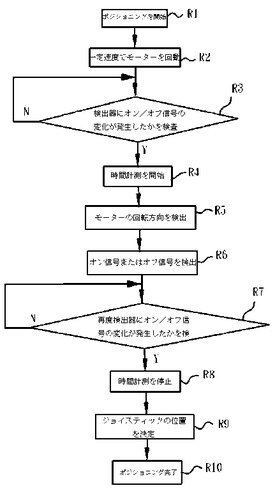
図7に本発明の実施例1の力覚提示装置ポジショニング方法のフローチャートを示す。本発明の実施例1で、不等間隔のブロッキング回折格子を利用してポジショニングを行う詳細な工程は次の通りである。工程R1では、力覚提示装置がポジショニングを開始する。工程R2では、モーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器内で一定速度で移動させる。工程R3では、検出器がオン/オフ信号の変化を発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程R4に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程R4では、時間計測を開始する。工程R5では、モーターの回転方向を検出する。続いて工程R6では、検出器のオン信号またはオフ信号を検出する。工程R7では、検出器に再度オン/オフ信号の変化が発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程R8に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程R8では時間計測を停止する。工程R9では、工程R5で検出したモーターの回転方向、工程R6で検出した検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合してジョイスティックの位置を取得し、最後に工程R10で、ポジショニングプロセスが完了する。
【0021】
このため、本発明の実施例1の力覚提示装置及びそのポジショニング方法は、揺動部材に不等間隔のブロッキング回折格子を設け、定速回転モーターを利用し、その揺動ルートで検出器を通過させ、小さな角度で揺動させるだけで、検出器を遮断または開放する時間の長さを生成し、迅速に力覚提示装置のポジショニングを完了するという目的を達することができる。
【実施例2】
【0022】
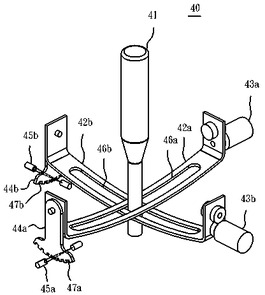
図8に本発明の実施例2の力覚提示装置40を示す。本発明の実施例2の力覚提示装置40は、実施例1の力覚提示装置と同様にマイクロプロセッサ、タイマー装置、メモリ装置を含む。2つの実施例の異なる点は、本発明の実施例2の力覚提示装置40は、実施例1の一次元の力覚提示装置を拡張して二次元にした点である。このため、本発明の実施例2の力覚提示装置40は、1つのジョイスティック41を維持しているほか、実施例2の力覚提示装置40中の各1次元のポジショニング構造に含まれる回転軸42a、42b、モーター43a、43b、揺動部材44a、44b、検出器45a、45bはいずれも実施例1の力覚提示装置のポジショニング構造とほぼ同じである。主な違いは、各1次元の回転軸42a、42bの駆動溝46a、46bを細長い形状の溝とし、2つの次元の回転軸42a、42bの駆動溝46a、46bを交差させて設置して、ジョイスティック41を駆動溝46a、46bに同時に穿通させ、2つの次元の回転軸42a、42bをそれぞれ回動させる点である。揺動部材44a、44bの不等間隔のブロッキング回折格子47a、47bを駆動して、検出器45a、45b内で揺動させ、それぞれ検出器を遮断または開放するオン/オフの変化を生じさせて、力覚提示装置40の二次元ポジショニングが完了する。
【0023】
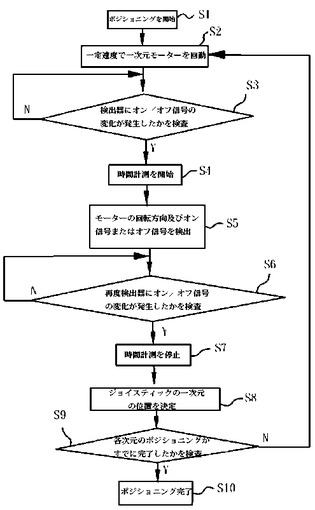
図9に本発明の実施例2の力覚提示装置ポジショニング方法のフローチャートを示す。本発明の実施例2でポジショニングを行う詳細な工程は次の通りである。工程S1では、力覚提示装置がポジショニングを開始する。工程S2では、順に1次元のモーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器内で一定速度で移動させる。工程S3では、検出器がオン/オフ信号の変化を発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程S4に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程S4では、時間計測を開始する。工程S5では、モーターの回転方向及び検出器のオン信号またはオフ信号を検出する。工程S6では、再度検出器にオン/オフ信号の変化が発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程S7に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程S7では時間計測を停止する。続いて工程S8では、工程S5で検出したモーターの回転方向及び検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合してジョイスティックの1次元の位置を取得し、再度工程S9に進み、各次元のポジショニングがすでに完了したかを検査する。各次元のポジショニングが完了していない場合、工程S2に戻り、別の次元のモーターを起動して、次の次元のポジショニングを行い、各次元のポジショニングがすでに完了している場合、S10に進み、ポジショニングのプロセスを終了する。
【0024】
このため、本発明の実施例2の力覚提示装置及びそのポジショニング方法は、多次元の力覚提示装置の揺動部材に不等間隔のブロッキング回折格子を設置し、少なくとも1つの次元以上の多次元力覚提示装置のポジショニングに適用することができる。
【0025】
以上の説明は、本発明の最良の実施例を説明したまでであり、本発明の範囲はこれら最良の実施例に限定されず、本発明に基づいて本発明の要旨を逸脱せずに行なったあらゆる変更は、すべて本発明の特許請求の範囲に含まれる。
【符号の説明】
【0026】
20、40 力覚提示装置
21、41 ジョイスティック
22、42a、42b 回転軸
23、43a、43b モーター
24、44a、44b 揺動部材
25、45a、45b 検出器
26、46a、46b 駆動溝
27 減速ギアセット
28、47a、47b ブロッキング回折格子
29a 凹部
29b 凸部
30 マイクロプロセッサ
31 タイマー装置
32 メモリ装置
【技術分野】
【0001】
本発明は力覚提示装置に関し、特に、制御用の力覚提示装置であって、力覚提示装置の起動時にジョイスティックの所在位置のポジショニングを決定する構造及びその方法に関するものである。
【背景技術】
【0002】
力覚提示装置(Force Feedback Device)は主に、複数の異なる制御機能の制御棒、ボタン、またはつまみを統合して1つのジョイスティックとし、かつジョイスティックの移動範囲を複数の制御機能区域に区分して、異なる制御機能区域に異なる力覚提示型態を付与し、ジョイスティックの現在の制御機能を提示して、制御方式と構造を簡略化している。
【0003】
図1に米国で公告されたUS7490530特許案を示す。この先行技術が開示する力覚提示装置10は、ジョイスティック11が2つの次元の回転軸12a、12bを同時に操作し、各次元の回転軸の一端に扇形ギア13a、13bが設置され、それぞれがモーター(図示しない)により駆動され、力覚を提供する。2つの次元の回転軸12a、12bの他端にそれぞれ揺動部材14a、14bが設置され、揺動部材14a、14bのL字形ブロック部15a、15bの長さは、揺動部材14a、14bの揺動角度の半分である。揺動部材14a、14bが揺動するとき、L字形ブロック部15a、15bがそれぞれ基座16上に設置されたフォトインタラプタ17a、17bを通過し、フォトインタラプタ17a、17bを遮断してオフ信号を発生する。逆に、L字形ブロック部15a、15bが通過しないときは、フォトインタラプタ17a、17bが遮断されず、オン信号を発生する。
【0004】
使用者がジョイスティック11をうっかり移動させたり、誤って動かしたりすると力覚提示装置10が起動時にジョイスティック11の停留位置を確定できないため、ポジショニング確認を行う必要がある。力覚提示装置10のポジショニング時は、モーターにより扇形ギア13a、13bを駆動し、回転軸12a、12bを回動させて、揺動部材14a、14bを揺動させ、ジョイスティック11を移動させてポジショニングを行う。揺動角度の半分を占めるL字形ブロック部15a、15bがフォトインタラプタ17a、17bを通過した、またはそれらに進入すると、フォトインタラプタ17a、17bがオン信号またはオフ信号の変化を生じ、ジョイスティック11がちょうど揺動角度の中心に位置していることを確認でき、ポジショニングが完了する。
【0005】
しかしながら、先行技術はL字形ブロック部15a、15bを揺動の中心まで回動させ、フォトインタラプタ17aを通過またはそれらに進入させて、オン信号またはオフ信号の変化を生じさせなければポジショニングを完了できない。揺動角度の半分を占めるL字形ブロック部15a、15bの移動角度が比較的大きいため、ポジショニング完了により長い時間がかかる。モーターがL字形ブロック部15a、15bを駆動したとき誤った方向に回動されると往復回動が必要になるため、ポジショニング完了にさらに時間がかかる。このため、力覚提示装置をオンにした後待つ必要があり、使用者が装置をオンにした後すぐに使用したがる習性を満たすことができず、使用上不便である。
【0006】
このため、力覚提示装置はポジショニングの構造と方法において、解決されるべき問題がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許公告第7490530号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、揺動部材に不等間隔のブロッキング回折格子を設置し、定速回転モーターを利用して、検出器を遮断または開放する時間の長さを生成し、ポジショニングを迅速に完了する、力覚提示装置及びそのポジショニング方法を提供することにある。
【0009】
本発明の別の目的は、多次元の揺動部材に不等間隔のブロッキング回折格子を設置して、多次元の力覚提示装置のポジショニングに適用する、力覚提示装置及びそのポジショニング方法を提供することにある。
【課題を解決するための手段】
【0010】
前述の発明の目的を達するため、本発明の力覚提示装置は、少なくとも1つの次元の回転軸の中間部に駆動溝が設けられ、ジョイスティックの一端が前記駆動溝に穿通されて、移動可能に力覚提示装置に枢設され、モーターが回転軸の一端を回動させ、回転軸の他端に不等間隔のブロッキング回折格子が設けられた揺動部材が固定され、検出器がブロッキング回折格子のルート上に設置され、ブロッキング回折格子を検出してオン信号またはオフ信号を発生し、メモリ装置にブロッキング回折格子の絶対角度が保存され、マイクロプロセッサがモーターの正方向または逆方向の定速回転を制御して、不等間隔のブロッキング回折格子を動かし、検出器を通過させて、オン信号またはオフ信号を発生させ、タイマー装置によりオン信号またはオフ信号の持続時間を測定し、ブロッキング回折格子が通過した角度を計算して、メモリ装置に保存された絶対角度と照合し、ブロッキング回折格子の絶対角度を決定して、ジョイスティックのポジショニングを完了する。
【0011】
本発明の力覚提示装置のポジショニング方法は、まずモーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器で一定速度で移動させる工程と、検出器のオン/オフ信号の変化発生を検査して、時間の計測を開始する工程と、再度モーターの回転方向を検出し、且つ検出器のオン信号またはオフ信号を検出する工程と、検出器の再度のオン/オフ信号の変化発生を検査して、時間計測を停止する工程と、検出したモーター回転方向、検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合し、ジョイスティックの1次元の位置を取得する工程と、別の次元のモーターを起動して、次の次元のポジショニングを行い、ジョイスティックの各次元のポジショニングを行なって、ポジショニングのプロセスを完了する工程を含む。
【発明の効果】
【0012】
以上のことから、本発明は、先行技術が長い時間をかけてポジショニングを完了させていたことを、迅速に完了することで課題を克服し、さらに多次元の力覚提示装置のポジショニングを実現することができる。
【図面の簡単な説明】
【0013】
【図1】先行技術の力覚提示装置の立体図である。
【図2】本発明の実施例1の力覚提示装置の立体図である。
【図3】本発明の揺動部材の凹部のブロッキング回折格子の構造を示す平面図である。
【図4】本発明の揺動部材の凸部のブロッキング回折格子の構造を示す平面図である。
【図5】本発明のブロッキング回折格子の絶対位置を示す概略図である。
【図6】本発明のブロッキング回折格子の検出を示す概略図である。
【図7】本発明の実施例1の力覚提示装置ポジショニング方法のフローチャートである。
【図8】本発明の実施例2の力覚提示装置の立体図である。
【図9】本発明の実施例2の力覚提示装置ポジショニング方法のフローチャートである。
【発明を実施するための形態】
【0014】
本発明が上述の目的を達するために採用した技術手段及びその効果について、最良の実施例と図面を組み合わせ、以下で説明する。
【実施例1】
【0015】
図2、図3、図4、図5を同時に参照する。図2は本発明の実施例1の力覚提示装置、図3及び図4は本発明の揺動部材、図5は本発明のブロッキング回折格子の絶対位置をそれぞれ示す。図2に示すように、本発明の実施例1の力覚提示装置20は一次元形式であり、主に、ジョイスティック21、回転軸22、モーター23、揺動部材24、検出器25を含む。そのうち、ジョイスティック21は一端が回転軸22中間部の駆動溝26に穿通され、移動可能に力覚提示装置20上に枢設される。回転軸22の一端がモーター23に連結され、回転軸22が正方向と逆方向に回動され、あらかじめ定めた角度範囲内で往復揺動される。回転軸22の適切な回動速度を取得するため、モーター23は減速ギアセット27を経由して回転軸22を駆動することができる。
【0016】
揺動部材24は回転軸22の他端に固定され、回転軸22と同期して揺動部材24が回動され、揺動する。揺動部材24の一端に不等間隔のブロッキング回折格子28が設けられ、ブロッキング回折格子28の揺動ルート上に、力覚提示装置20に固定された検出器25が設置され、ブロッキング回折格子28の遮断または開放を検出して、オン信号またはオフ信号を発生する。本実施例の検出器25は、光検出器を例とし、検出器25の投射する光束の遮断または開放を利用してオン信号またはオフ信号を発生するが、これに限定されず、ブロッキング回折格子28の遮断または開放を検出できる検出器であれば、例えば磁気検出器等も適用することができる。このほか、本発明の力覚提示装置20は、マイクロプロセッサ30を含み、モーター23の正方向と逆方向の定速回転を制御・検出し、検出器25のオン/オフ信号の変化を検出するために用いられ、同時にタイマー装置31で検出器25のオン信号またはオフ信号の持続時間を計測する。
【0017】
図3に示すように、揺動部材24は一端に一列の凹部29aと凸部29bが交互に間を隔てて設けられ、不等間隔のブロッキング回折格子28が形成される。そのうち、各凹部29aは異なる間隔距離を備え、例えば図4に示すように、異なる間隔距離の凸部29bのように、等間隔または異なる間隔距離の凸部29bに対応する。あらかじめ設定された基準点、例えば揺動部材24の最大揺動角度の一側を基準点0度とし、図5に示すように揺動部材24の凹部29aと凸部29bを順に配列して、座標軸に示すような各凹部29a両側端点の絶対角度を取得することができ、かつブロッキング回折格子28の絶対角度を力覚提示装置20のメモリ装置32に保存する。
【0018】
同時に図2と図6を参照する。図6は本発明のブロッキング回折格子の検出を示す図である。本発明の力覚提示装置20がポジショニングを行うとき、マイクロプロセッサ30がモーター23を制御して一定の回転速度で回転させ、減速ギアセット27を経由して回転軸22の回動を駆動し、同時に揺動部材24を動かして揺動させ、揺動部材24のブロッキング回折格子28を検出器25内で一定速度で移動させる。実例を挙げて説明すると、図6に示すように、起動時に検出器25が投射する光束がブロッキング回折格子28の4.5度の凸部29bに当たると仮定すると、光束が遮断されるため、検出器25はオフ信号(off)を発生する。モーター23の回転方向に従い、光束は矢印に沿って、ブロッキング回折格子28の3.5度の凹部29aに向かって移動する。光束が4.5度の凸部29bを離れて3.5度の凹部29aに進入すると、光束が開放され、検出器25がオン信号(on)を発生し、1回のオン/オフの変化が形成される。マイクロプロセッサ30は検出器25のオン/オフ信号の変化を検出すると、タイマー装置31により検出器25のオン信号持続時間の計測を開始し、かつモーター23の回転方向、例えば正方向回転を検出する。光束が3.5度の凹部29aを離れて5.5度の凸部29bに進入すると、光束が再度遮断され、マイクロプロセッサ30が再度検出器25のオン/オフ信号の変化を検出すると、時間計測が停止される。マイクロプロセッサ30は2回のオン/オフ信号の変化の間の測定時間を利用して、定速で回転するモーター23から、ブロッキング回折格子28が通過した角度を計算し、かつオン信号に基づき、メモリ装置32に保存されたブロッキング回折格子28の絶対角度と照合して、3.5度の凹部29aを取得し、さらにモーター23の正方向回転に基づき、時間計測の終点が3.5度の凹部29aの正方向回転側、即ち絶対角度15度の位置と決定し、ジョイスティック21のポジショニングが完了する。
【0019】
同様の理で、前述においてモーター23の回転方向が逆方向回転と検出されたと仮定すると、時間計測の終点を3.5度の凹部29aの逆方向回転側、即ち絶対角度11.5度の位置と決定することができる。計測したのが検出器25のオフ信号とすると、メモリ装置32に保存されたブロッキング回折格子28の絶対角度と照合して、3.5度の凸部29bを得ることができる。このため、本発明はブロッキング回折格子28中の1つの凹部または凸部の小角度を移動して検出するだけで、迅速にポジショニングを完了できる。
【0020】
図7に本発明の実施例1の力覚提示装置ポジショニング方法のフローチャートを示す。本発明の実施例1で、不等間隔のブロッキング回折格子を利用してポジショニングを行う詳細な工程は次の通りである。工程R1では、力覚提示装置がポジショニングを開始する。工程R2では、モーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器内で一定速度で移動させる。工程R3では、検出器がオン/オフ信号の変化を発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程R4に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程R4では、時間計測を開始する。工程R5では、モーターの回転方向を検出する。続いて工程R6では、検出器のオン信号またはオフ信号を検出する。工程R7では、検出器に再度オン/オフ信号の変化が発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程R8に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程R8では時間計測を停止する。工程R9では、工程R5で検出したモーターの回転方向、工程R6で検出した検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合してジョイスティックの位置を取得し、最後に工程R10で、ポジショニングプロセスが完了する。
【0021】
このため、本発明の実施例1の力覚提示装置及びそのポジショニング方法は、揺動部材に不等間隔のブロッキング回折格子を設け、定速回転モーターを利用し、その揺動ルートで検出器を通過させ、小さな角度で揺動させるだけで、検出器を遮断または開放する時間の長さを生成し、迅速に力覚提示装置のポジショニングを完了するという目的を達することができる。
【実施例2】
【0022】
図8に本発明の実施例2の力覚提示装置40を示す。本発明の実施例2の力覚提示装置40は、実施例1の力覚提示装置と同様にマイクロプロセッサ、タイマー装置、メモリ装置を含む。2つの実施例の異なる点は、本発明の実施例2の力覚提示装置40は、実施例1の一次元の力覚提示装置を拡張して二次元にした点である。このため、本発明の実施例2の力覚提示装置40は、1つのジョイスティック41を維持しているほか、実施例2の力覚提示装置40中の各1次元のポジショニング構造に含まれる回転軸42a、42b、モーター43a、43b、揺動部材44a、44b、検出器45a、45bはいずれも実施例1の力覚提示装置のポジショニング構造とほぼ同じである。主な違いは、各1次元の回転軸42a、42bの駆動溝46a、46bを細長い形状の溝とし、2つの次元の回転軸42a、42bの駆動溝46a、46bを交差させて設置して、ジョイスティック41を駆動溝46a、46bに同時に穿通させ、2つの次元の回転軸42a、42bをそれぞれ回動させる点である。揺動部材44a、44bの不等間隔のブロッキング回折格子47a、47bを駆動して、検出器45a、45b内で揺動させ、それぞれ検出器を遮断または開放するオン/オフの変化を生じさせて、力覚提示装置40の二次元ポジショニングが完了する。
【0023】
図9に本発明の実施例2の力覚提示装置ポジショニング方法のフローチャートを示す。本発明の実施例2でポジショニングを行う詳細な工程は次の通りである。工程S1では、力覚提示装置がポジショニングを開始する。工程S2では、順に1次元のモーターを起動して一定の回転速度で1次元の回転軸を回動させ、ブロッキング回折格子を動かして検出器内で一定速度で移動させる。工程S3では、検出器がオン/オフ信号の変化を発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程S4に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程S4では、時間計測を開始する。工程S5では、モーターの回転方向及び検出器のオン信号またはオフ信号を検出する。工程S6では、再度検出器にオン/オフ信号の変化が発生したかを検査する。検出器にオン/オフ信号の変化が発生した場合、工程S7に進み、そうでなければ検出器のオン/オフ信号の変化の検査を継続する。工程S7では時間計測を停止する。続いて工程S8では、工程S5で検出したモーターの回転方向及び検出器のオン信号またはオフ信号、及び計測された時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合してジョイスティックの1次元の位置を取得し、再度工程S9に進み、各次元のポジショニングがすでに完了したかを検査する。各次元のポジショニングが完了していない場合、工程S2に戻り、別の次元のモーターを起動して、次の次元のポジショニングを行い、各次元のポジショニングがすでに完了している場合、S10に進み、ポジショニングのプロセスを終了する。
【0024】
このため、本発明の実施例2の力覚提示装置及びそのポジショニング方法は、多次元の力覚提示装置の揺動部材に不等間隔のブロッキング回折格子を設置し、少なくとも1つの次元以上の多次元力覚提示装置のポジショニングに適用することができる。
【0025】
以上の説明は、本発明の最良の実施例を説明したまでであり、本発明の範囲はこれら最良の実施例に限定されず、本発明に基づいて本発明の要旨を逸脱せずに行なったあらゆる変更は、すべて本発明の特許請求の範囲に含まれる。
【符号の説明】
【0026】
20、40 力覚提示装置
21、41 ジョイスティック
22、42a、42b 回転軸
23、43a、43b モーター
24、44a、44b 揺動部材
25、45a、45b 検出器
26、46a、46b 駆動溝
27 減速ギアセット
28、47a、47b ブロッキング回折格子
29a 凹部
29b 凸部
30 マイクロプロセッサ
31 タイマー装置
32 メモリ装置
【特許請求の範囲】
【請求項1】
力覚提示装置であって、
少なくとも1つの次元の回転軸の中間部に設けられた駆動溝と、
一端が前記駆動溝に穿通され、移動可能に前記力覚提示装置に枢設されたジョイスティックと、
前記回転軸の一端に連結され、前記回転軸の回動を駆動するモーターと、
不等間隔のブロッキング回折格子(non−equidistant blocking grating)が設けられ、前記回転軸の他端に固定されて、前記回転軸と同期して回動する揺動部材と、
前記ブロッキング回折格子のルート上に設置され、前記不等間隔のブロッキング回折格子を検出してオン信号またはオフ信号を発生する検出器と、
前記ブロッキング回折格子の絶対角度を保存したメモリ装置と、
前記モーターの回転を制御し、かつタイマー装置により前記検出器のオン信号またはオフ信号の時間を計測するために用いられるマイクロプロセッサと、
を含み、そのうち、前記マイクロプロセッサが前記モーターの正方向または逆方向の定速回転を制御して、不等間隔の前記ブロッキング回折格子を動かし、前記検出器を通過させて、オン信号またはオフ信号を発生させ、前記タイマー装置によりオン信号またはオフ信号の持続時間を計測して、前記ブロッキング回折格子が通過した角度を計算し、前記メモリ装置に保存された絶対角度と照合して、前記ブロッキング回折格子の絶対角度を決定し、前記ジョイスティックのポジショニングを完了することを特徴とする、力覚提示装置。
【請求項2】
請求項1に記載の力覚提示装置において、前記揺動部材の一端に一列の凹部及び凸部が交互に間を隔てて設けられ、不等間隔の前記ブロッキング回折格子が形成されたことを特徴とする、力覚提示装置。
【請求項3】
請求項3に記載の力覚提示装置において、前記各凹部が異なる間隔距離を備え、等間隔または異なる間隔距離の凸部を隔てていることを特徴とする、力覚提示装置。
【請求項4】
請求項3に記載の力覚提示装置において、前記検出器が光検出器であることを特徴とする、力覚提示装置。
【請求項5】
請求項4に記載の力覚提示装置において、前記凹部が前記検出器を開放してオン信号を形成し、前記凸部が前記検出器を遮断してオフ信号を形成し、前記オン信号またはオフ信号により凹部または凸部が前記検出器を通過したことを決定し、前記モーターの正方向または逆方向の回転に基づいて、時間計測の終点が前記凹部または前記凸部の正方向回転または逆方向回転側の位置であることを決定することを特徴とする、力覚提示装置。
【請求項6】
請求項1に記載の力覚提示装置において、前記絶対角度の基準点が、前記揺動部材の最大揺動角度の一側に設けられたことを特徴とする、力覚提示装置。
【請求項7】
請求項1に記載の力覚提示装置において、前記マイクロプロセッサが前記検出器の2回のオン/オフ信号の変化の間の時間計測を利用して、前記ブロッキング回折格子が前記検出器を通過した角度を計算することを特徴とする、力覚提示装置。
【請求項8】
請求項1に記載の力覚提示装置において、前記力覚提示装置が、2つの次元の回転軸を備え、前記2つの次元の回転軸の駆動溝が交差して設置され、前記ジョイスティックが前記2つの駆動溝に同時に穿通され、前記2つの次元の回転軸がそれぞれ回動されることを特徴とする、力覚提示装置。
【請求項9】
力覚提示装置のポジショニング方法であって、
(1) モータを起動して一定の回転速度で1次元の回転軸を回転させ、ブロッキング回折格子を動かして検出器内で一定の速度で移動させる工程と、
(2) 検出器がオン/オフ信号の変化を発生したかを検査し、検出器がオン/オフ信号の変化を発生した場合は、工程(3)に進み、そうでない場合は検出器のオン/オフ信号の変化の検査を継続する工程と、
(3) 時間計測を開始する工程と、
(4) モーターの回転方向を検出し、且つ検出器のオン信号またはオフ信号を検出する工程と、
(5) 検出器が再度オン/オフ信号の変化を発生したかを検査し、検出器がオン/オフ信号の変化を発生した場合は、工程(6)に進み、そうでない場合は検出器のオン/オフ信号の変化の検査を継続する工程と、
(6) 時間計測を停止する工程と、
(7) 検出したモーターの回転方向、検出器のオン信号またはオフ信号、及び計測した時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合し、ジョイスティックの1次元の位置を取得する工程と、
(8)ポジショニングを完了する工程と、
を含むことを特徴とする、力覚提示装置のポジショニング方法。
【請求項10】
請求項9に記載の力覚提示装置のポジショニング方法において、前記工程(7)でジョイスティックの1次元のポジショニングを完了した後、さらに工程(7A)ジョイスティックの各次元のポジショニングを完了したかを検査し、完了していない場合は工程(1)に戻って別の次元のモーターを起動し、次の次元のポジショニングを行い、完了している場合は、工程(8)のポジショニングを終了するプロセスに至ることを含むことを特徴とする、力覚提示装置のポジショニング方法。
【請求項1】
力覚提示装置であって、
少なくとも1つの次元の回転軸の中間部に設けられた駆動溝と、
一端が前記駆動溝に穿通され、移動可能に前記力覚提示装置に枢設されたジョイスティックと、
前記回転軸の一端に連結され、前記回転軸の回動を駆動するモーターと、
不等間隔のブロッキング回折格子(non−equidistant blocking grating)が設けられ、前記回転軸の他端に固定されて、前記回転軸と同期して回動する揺動部材と、
前記ブロッキング回折格子のルート上に設置され、前記不等間隔のブロッキング回折格子を検出してオン信号またはオフ信号を発生する検出器と、
前記ブロッキング回折格子の絶対角度を保存したメモリ装置と、
前記モーターの回転を制御し、かつタイマー装置により前記検出器のオン信号またはオフ信号の時間を計測するために用いられるマイクロプロセッサと、
を含み、そのうち、前記マイクロプロセッサが前記モーターの正方向または逆方向の定速回転を制御して、不等間隔の前記ブロッキング回折格子を動かし、前記検出器を通過させて、オン信号またはオフ信号を発生させ、前記タイマー装置によりオン信号またはオフ信号の持続時間を計測して、前記ブロッキング回折格子が通過した角度を計算し、前記メモリ装置に保存された絶対角度と照合して、前記ブロッキング回折格子の絶対角度を決定し、前記ジョイスティックのポジショニングを完了することを特徴とする、力覚提示装置。
【請求項2】
請求項1に記載の力覚提示装置において、前記揺動部材の一端に一列の凹部及び凸部が交互に間を隔てて設けられ、不等間隔の前記ブロッキング回折格子が形成されたことを特徴とする、力覚提示装置。
【請求項3】
請求項3に記載の力覚提示装置において、前記各凹部が異なる間隔距離を備え、等間隔または異なる間隔距離の凸部を隔てていることを特徴とする、力覚提示装置。
【請求項4】
請求項3に記載の力覚提示装置において、前記検出器が光検出器であることを特徴とする、力覚提示装置。
【請求項5】
請求項4に記載の力覚提示装置において、前記凹部が前記検出器を開放してオン信号を形成し、前記凸部が前記検出器を遮断してオフ信号を形成し、前記オン信号またはオフ信号により凹部または凸部が前記検出器を通過したことを決定し、前記モーターの正方向または逆方向の回転に基づいて、時間計測の終点が前記凹部または前記凸部の正方向回転または逆方向回転側の位置であることを決定することを特徴とする、力覚提示装置。
【請求項6】
請求項1に記載の力覚提示装置において、前記絶対角度の基準点が、前記揺動部材の最大揺動角度の一側に設けられたことを特徴とする、力覚提示装置。
【請求項7】
請求項1に記載の力覚提示装置において、前記マイクロプロセッサが前記検出器の2回のオン/オフ信号の変化の間の時間計測を利用して、前記ブロッキング回折格子が前記検出器を通過した角度を計算することを特徴とする、力覚提示装置。
【請求項8】
請求項1に記載の力覚提示装置において、前記力覚提示装置が、2つの次元の回転軸を備え、前記2つの次元の回転軸の駆動溝が交差して設置され、前記ジョイスティックが前記2つの駆動溝に同時に穿通され、前記2つの次元の回転軸がそれぞれ回動されることを特徴とする、力覚提示装置。
【請求項9】
力覚提示装置のポジショニング方法であって、
(1) モータを起動して一定の回転速度で1次元の回転軸を回転させ、ブロッキング回折格子を動かして検出器内で一定の速度で移動させる工程と、
(2) 検出器がオン/オフ信号の変化を発生したかを検査し、検出器がオン/オフ信号の変化を発生した場合は、工程(3)に進み、そうでない場合は検出器のオン/オフ信号の変化の検査を継続する工程と、
(3) 時間計測を開始する工程と、
(4) モーターの回転方向を検出し、且つ検出器のオン信号またはオフ信号を検出する工程と、
(5) 検出器が再度オン/オフ信号の変化を発生したかを検査し、検出器がオン/オフ信号の変化を発生した場合は、工程(6)に進み、そうでない場合は検出器のオン/オフ信号の変化の検査を継続する工程と、
(6) 時間計測を停止する工程と、
(7) 検出したモーターの回転方向、検出器のオン信号またはオフ信号、及び計測した時間に基づいて、保存されたブロッキング回折格子の絶対角度と照合し、ジョイスティックの1次元の位置を取得する工程と、
(8)ポジショニングを完了する工程と、
を含むことを特徴とする、力覚提示装置のポジショニング方法。
【請求項10】
請求項9に記載の力覚提示装置のポジショニング方法において、前記工程(7)でジョイスティックの1次元のポジショニングを完了した後、さらに工程(7A)ジョイスティックの各次元のポジショニングを完了したかを検査し、完了していない場合は工程(1)に戻って別の次元のモーターを起動し、次の次元のポジショニングを行い、完了している場合は、工程(8)のポジショニングを終了するプロセスに至ることを含むことを特徴とする、力覚提示装置のポジショニング方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−243306(P2012−243306A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2012−94447(P2012−94447)
【出願日】平成24年4月18日(2012.4.18)
【出願人】(512101785)廣明光電股▲ふん▼有限公司 (1)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成24年4月18日(2012.4.18)
【出願人】(512101785)廣明光電股▲ふん▼有限公司 (1)
【Fターム(参考)】
[ Back to top ]