
力覚提示装置
【課題】従来よりもいっそう小型化可能な力覚提示装置を提供する。
【解決手段】操作者によって操作される移動指示部材1と、移動指示部材1を宙吊り状態に支持する支持部材2と、支持部材2の張力を制御する張力制御手段4と、支持部材2の長さを計測する計測手段4と、張力制御手段4及び計測手段4に囲まれて位置する支柱10と、を備え、移動指示部材1と張力制御手段4とは支持部材2によって接続され、前記操作者により操作される移動指示部材1の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、支持部材2は少なくとも8つであり、移動指示部材1は、支柱10を囲んで支持部材2により支持されるリング形状部材であり、隣接する2つの支持部材2のそれぞれの一端が、移動指示部材1内壁の同位置に固定されていることを特徴とする、力覚提示装置100。
【解決手段】操作者によって操作される移動指示部材1と、移動指示部材1を宙吊り状態に支持する支持部材2と、支持部材2の張力を制御する張力制御手段4と、支持部材2の長さを計測する計測手段4と、張力制御手段4及び計測手段4に囲まれて位置する支柱10と、を備え、移動指示部材1と張力制御手段4とは支持部材2によって接続され、前記操作者により操作される移動指示部材1の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、支持部材2は少なくとも8つであり、移動指示部材1は、支柱10を囲んで支持部材2により支持されるリング形状部材であり、隣接する2つの支持部材2のそれぞれの一端が、移動指示部材1内壁の同位置に固定されていることを特徴とする、力覚提示装置100。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、力覚提示装置に関する。
【背景技術】
【0002】
近年、計算機性能の飛躍的な向上により、三次元の仮想現実(Virtual Reality)空間(以下、適宜単に「三次元空間」と言う。)内における対象物(物体)の位置制御が実行可能になってきている。ただ、このような三次元空間内での位置制御に適用可能な例えばパーソナルコンピュータ(PC)用マウス等の二次元空間用位置制御手段は、直観的な操作が困難である。そのため、前記マウスは、三次元空間用位置制御手段としては、未だ不十分である。そこで、三次元空間内位置制御手段として、力覚提示装置(ハプティックインターフェース;Haptic Interface)が注目されてきている。なお、「力覚」とは、力の感覚のことである。
【0003】
力覚提示装置は、三次元空間内で対象物の位置を操作者が制御しつつ、三次元空間内で対象物を把持した時の重み、対象物が障害物に衝突した時の感触等を、操作者が感じ取ることができるようにするものである。そのため、このような力覚提示装置に拠れば、三次元空間内での対象物の位置制御(取扱い)を、より直観的に行うことができる。そして、このような力覚提示装置は、例えば、手術用シミュレータ、組立シミュレータ、遊戯装置等、様々な分野で使用されている。
【0004】
力覚提示装置としては、例えば特許文献1に記載されているものがある。図6は、特許文献1に記載の力覚提示装置を模式的に示す斜視図である。図6に示す力覚提示装置200は立方格子状に形成されている。そして、前記立方格子の8頂点近傍に、それぞれモータ130a〜130h、プーリ160a〜160h及びロータリーエンコーダ170a〜170hが一体となって固定して設けられている。なお、これらは、フレーム120に固定されている。この際、モータ130a〜130h、プーリ160a〜160h及びロータリーエンコーダ170a〜170hは、各手段に追従して一体となって回転するようになっている。
【0005】
前記立方格子の中心付近には、球状のグリップ150が設けられている。そして、グリップ150には8本の糸140a〜140hが接続され、それぞれの糸は各プーリ160a〜160hに捲回されるようになっている。従って、グリップ150を操作者が把持してグリップ150を移動させると、それに追従して、各糸140a〜140gが各プーリ160a〜160hに捲回される。そして、当該糸の捲回量を各ロータリーエンコーダ170a〜170hが計測することにより、グリップ150の移動方向及び回転方向並びに移動量及び回転量が決定される。そして、これらの決定された値に基づいて、三次元空間内の対象物の位置制御が行われるようになっている。
【0006】
また、例えば特許文献2には、グリップとして球殻が用いられている力覚提示装置が記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−282448号公報
【特許文献2】特許4547559号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
例えば図6に示す従来の力覚提示装置は、操作者の意図する方向に意図する量で、三次元空間内での対象物を移動可能である。しかしながら、図6に示す従来の力覚提示装置は、立方格子の各頂点近傍にプーリ等が設けられている。そして、前記立方格子の中心付近に設けられているグリップと前記プーリとが糸を介して接続されている。そのため、力覚提示装置の小型化が困難であるという課題がある。
【0009】
即ち、力覚提示装置の小型化を目的として、例えば立方格子を小型化し、グリップとプーリとを接続する糸の長さを短くした場合、糸の長さが短すぎることがあり、その結果、グリップの移動可能範囲が限られることがある。そのため、三次元空間内の対象物の移動量及び移動方向が制限されることがある。
【0010】
そして、操作者は立方格子中心近傍のグリップを把持するため、通常、立方格子内に操作者が手等を挿入しなければならない。そのため、立方格子の大きさは、少なくとも操作者の手の大きさ以上でなければならず、立方格子の小型化には自ずと限界が生じる。
【0011】
さらに、操作者がグリップを把持してグリップを移動させる際、グリップに接続されている糸がグリップ操作の障害となることがある。即ち、操作者がグリップを把持しようとする際に、糸との接続部分が邪魔になることがあり、把持が困難になることがある。その結果、自在にグリップ移動を行うためには、操作者が過度の負担を強いられることがある。さらには、三次元空間内の対象物の移動量及び移動方向が制限されることもある。
【0012】
また、例えば特許文献2に記載の力覚提示装置においては、球殻のグリップが上ベースと接触することがある。その結果、三次元空間内の対象物の移動量及び移動方向が制限されることがある。また、特にグリップ部分が依然として大きいため、力覚提示装置の小型化の観点からは、未だ不十分である。
【0013】
本発明は前記課題に鑑みて為されたものであり、その目的は、従来よりもいっそう小型化可能な力覚提示装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明者らは前記課題を解決するために鋭意検討した結果、以下の知見を見出した。即ち、本発明の要旨は、操作者によって操作される移動指示部材と、該移動指示部材を宙吊り状態に支持する支持部材と、該支持部材の張力を制御する張力制御手段と、前記支持部材の長さを計測する計測手段と、前記張力制御手段及び前記計測手段に囲まれて位置する支柱と、を備え、前記移動指示部材と前記張力制御手段とは前記支持部材によって接続され、前記操作者により操作される前記移動指示部材の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、前記支持部材は少なくとも8つであり、前記移動指示部材は、前記支柱を囲んで前記支持部材により支持されるリング形状部材であり、隣接する2つの前記支持部材のそれぞれの一端が、前記移動指示部材内壁の同位置に固定されていることを特徴とする、力覚提示装置に関する(請求項1)。
【0015】
この発明に拠れば、従来よりもいっそう自由に、三次元空間内の対象物の移動方向及び移動量を制御することが可能となる。また、従来よりもいっそう正確に、三次元空間内の対象物の移動方向及び移動量を制御することが可能となる。しかも、従来よりもいっそう小型化することができる。
【0016】
また、前記支柱の上端部には上ベースが設けられ、前記支柱の下端部には下ベースが設けられ、前記支柱、前記上ベース及び前記下端部は一体に形成されているとともに、前記張力制御手段及び前記計測手段は、前記上ベース又は前記下ベースに設けられている(請求項2)。
【0017】
この発明に拠れば、張力制御手段及び計測手段の位置を、それらの大きさに併せて任意に設置することができる。そのため、操作者の操作に際して障害となることがないように、張力制御手段及び計測手段を設置することができる。
【0018】
また、全ての前記張力制御手段及び前記計測手段が、下ベースに設けられている(請求項3)。
【0019】
この発明に拠れば、力覚提示装置の小型化が特に要求される分野で、特に好適に使用可能となる。
【0020】
また、このとき、前記張力制御手段及び前記計測手段は、エンコーダ付きモータにより構成されている(請求項4)。
【0021】
この発明に拠れば、張力制御手段及び計測手段を同一の装置を用いて構成することができる。そのため、力覚提示装置のよりいっそうの小型化を図ることができる。
【0022】
さらに、前記支柱の上端部に一体に形成されている上ベースに、操作者が操作可能な操作部が設けられている(請求項5)。
【0023】
この発明に拠れば、操作者が三次元空間内の対象物の移動を行いつつ、操作部を用いた操作を片手で同時行うことができる。その結果、操作の利便性を向上させることができる。
【発明の効果】
【0024】
本発明に拠れば、従来よりもいっそう小型化可能な力覚提示装置を提供することができる。
【図面の簡単な説明】
【0025】
【図1】本実施形態に係る力覚提示装置を模式的に示す斜視図である。
【図2】本実施形態に係る力覚提示装置を模式的に示す上側面図である。
【図3】本実施形態に係る力覚提示装置における、グリップと糸との関係を模式的に示す図である。
【図4】本実施形態に係る力覚提示装置の操作形態を示す図である。
【図5】本実施形態に係る力覚提示装置における計算方法を説明するための図である。
【図6】従来の力覚提示装置を模式的に示す斜視図である。
【発明を実施するための形態】
【0026】
以下、本発明を実施するための形態(本実施形態)を図面を参照しながら説明する。ただし、本発明は以下の実施形態に何ら制限されず、本発明の要旨を逸脱しない範囲内で任意に変更して実施可能である。
【0027】
[1.構成]
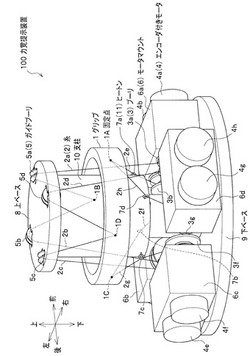
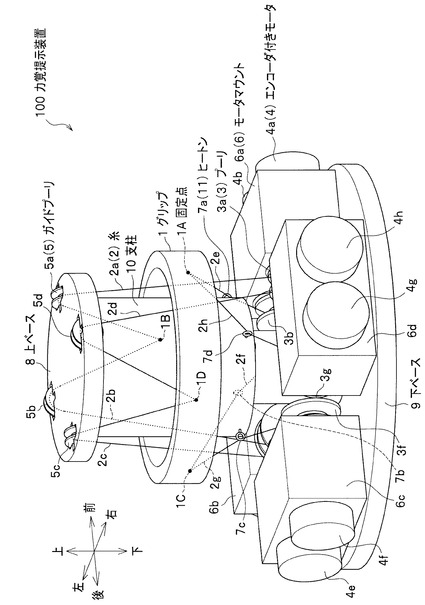
本実施形態に係る力覚提示装置の構成を図1(斜視図)及び図2(上側面図)に示す。図1に示す力覚提示装置100は、グリップ1と、糸2と、プーリ3と、エンコーダ付きモータ4と、ガイドプーリ5と、モータマウント6と、ヒートン7と、上ベース8と、下ベース9と、支柱10と、を備えてなる。
【0028】
なお、糸2としての糸2a〜2hは全て同じものであるため、それらの内の一部の説明を省略している。また、プーリ3としてのプーリ3a〜3hも全て同じものであるため、それらの内の一部の説明を省略している。さらに、エンコーダ付きモータ4としてのエンコーダ付きモータ4a〜4hも全て同じものであるため、それらのうちの一部の説明を省略している。そして、ガイドプーリ5としてのガイドプーリ5a〜5hも全て同じものであるため、それらのうちの一部の説明を省略している。また、モータマウント6としてのモータマウント6a〜6hも全て同じものであるため、それらのうちの一部の説明を省略している。
【0029】
グリップ1(移動指示部材)は、操作者によって把持及び移動されることにより、三次元空間内の対象物の位置を制御するものである。グリップ1の形状は、図1に示すようにリング形状である。そしてグリップ1は、上ベース8と下ベース9とを一体に固定する支柱10を囲んで、後記する糸2により宙吊り状態で支持されている。グリップ1の高さは、本実施形態においては2cm程度である。ただし、この長さは適宜変更可能であり、グリップ1を最大限傾けたときに、グリップ1が上ベース8及び下ベース9に接触しない程度の高さに設定すれば良い。
【0030】
グリップ1は、前記のようにリング形状を有している。そのため、従来の球形状のグリップとは異なり、操作者がグリップ1を操作する際、グリップ1が上ベース8(後記する)に接触することがない。従って、グリップ1の移動範囲が制限されず、支柱10に接触しない範囲内で自在に、作業者が三次元空間内の任意の位置に対象物を移動させることができる。
【0031】
糸2(支持部材)は、支柱10(後記する)を囲うようにして、グリップ1を宙吊り状態に支持するものである。この際、糸2はグリップ1の内壁に設けられている固定点1A〜1Dで固定され、グリップ1が支持されるようになっている。そして、力覚提示装置100においては、糸2として8本の糸2a〜2hが備えられ、これらによってグリップ1が支持されるようになっている。
【0032】
なお、本実施形態においては、各固定点1A〜1Dと各プーリ3a〜3h(後記する)との間を、それぞれ、一本の糸2a〜2hとして説明している。従って、例えば、糸2aは、ガイドプーリ5aを介して、固定点1Bとプーリ3aとを接続する糸を表している。
【0033】
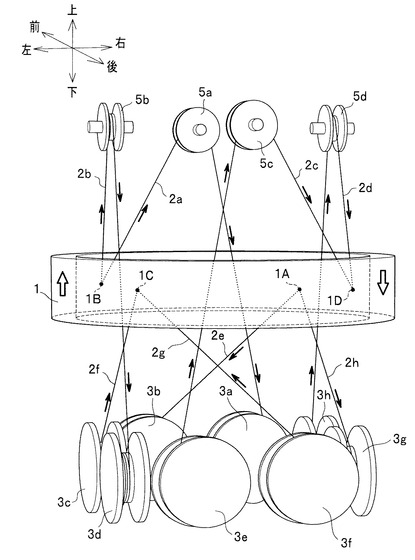
糸2による移動指示部材1の具体的な支持方法を、図3を参照しながら説明する。なお、図3中、各糸2近傍に記載している矢印は、後記する[2.動作]において説明する。また、図3においては、図示及び説明の簡略化のために、グリップ1、糸2、プーリ3及びガイドプーリ5のみを示している。
【0034】
図3に示すように、固定点1Aでは、グリップ1から下方向に伸びる糸2e及び2hの一端が固定されている。また、同様に固定点1Cでは、グリップ1から下方向に伸びる糸2f及び2gの一端が固定されている。即ち、隣接する2つの糸のそれぞれの一端が、グリップ1の内壁の同位置(固定点)で固定されている。
【0035】
一方、固定点1Bでは、グリップ1から上方向に伸びる糸2a及び2bの一端が固定されている。ただし、糸2a及び糸2bはいずれも、上ベース8に設けられているガイドプーリ5a及びガイドプーリ5bによって、下方向に向きが変化するようになっている。また、同様に固定点1Dでは、グリップ1から上方向に伸びる糸2c及び2dの一端が固定されている。そして、糸2c及び糸2dについても、上ベース8に設けられているガイドプーリ5c及びガイドプーリ5dによって、下方向に向きが変化するようになっている。
【0036】
力覚提示装置100においては、支持部材としての糸2を8本用いている。そのため、糸2が接続されるプーリ3及びそれと一体に形成されるエンコーダ付きモータ4の数も、8つとなっている。そして、力覚提示装置100を上部から見た場合、リング形状グリップ1内壁において、4つの固定点1A〜1Dは正方形の各頂点になっている。この固定点の位置は計算に拠って決定することができる。この計算方法については、[4.固定点の決定方法]において後記する。
【0037】
プーリ3は、糸2を捲回するものである。具体的には、円筒の両端面にフランジが形成され、両フランジの間に形成される溝に糸2が捲回されるようになっている。そして、プーリ3は、エンコーダ付きモータ4(後記する)と一体となって設けられている。即ち、プーリ3が回転すると、エンコーダ付きモータ4もそれに伴って回転するようになっている。
【0038】
ここで、プーリ3に糸2が捲回されるときの動作を、図1及び図3を参照しながら固定点1A〜1Dで固定されている糸2毎に説明する。前記のように、固定点1Aでは、糸2e及び糸2hの一端が固定されている。そして、糸2e及び糸2hはそれぞれ、ヒートン7a及びヒートン7dを介して、プーリ3b及びプーリ3gに捲回されるようになっている。
【0039】
また、固定点1Bでは、糸2a及び糸2bの一端が固定されている。そして、糸2a及び糸2bはいったん上方向に向かい、その後ガイドプーリ5a及びガイドプーリ5bを介して下方向に向きを変え、プーリ3a及びプーリ4dに捲回されるようになっている。
【0040】
さらに、固定点1Cでは、糸2f及び糸2gの一端が固定されている。そして、糸2f及び糸2gはそれぞれ、ヒートン7b及びヒートン7cを介して、プーリ3c及びプーリ3fに捲回されるようになっている。
【0041】
そして、固定点1Dでは、糸2c及び糸2dの一端が固定されている。そして、糸2c及び糸2dはいったん上方向に向かい、その後ガイドプーリ5c及びガイドプーリ5dを介して下方向に向きを変え、プーリ3e及びプーリ3hに捲回されるようになっている。
【0042】
エンコーダ付きモータ(張力制御手段及び計測手段)4は、糸2の張力を制御するとともに糸2の長さを計測するものである。エンコーダ付きモータ4は、下ベース9に支柱10(後記する)を囲うように設けられている。この際、エンコーダ付きモータ4は2つずつモータマウント6(後記する)によって固定され、4つのモータマウント6が前後左右方向にそれぞれに設けられている。
【0043】
エンコーダ付きモータ4は、前記のように、プーリ3と一体となって固定されている。そのため、エンコーダ付きモータ4は、プーリ3に捲回される糸2の量及び引き出される糸2の量を計測することができるようになっている。また、エンコーダ付きモータ4は、プーリ3を介して、糸2の張力を制御できるようになっている。即ち、即ち、グリップ1とエンコーダ付きモータ4とは、糸2によって間接的に接続されていることになる。
【0044】
ガイドプーリ5は上ベース8に設けられているものである。ガイドプーリ5の構成はプーリ3と同様であるが、糸2の捲回はせず、前記のように糸2の向きを変化させるようになっている。
【0045】
モータマウント6はプーリ3及びエンコーダ付きモータ4を下ベース9に設置するものである。力覚提示装置100においては、2組のプーリ及びエンコーダ付きモータ4を1つのモータマウント6で下ベース9に固定するようになっている。
【0046】
ヒートン7は、各固定点1A〜1Dから直接下方向に向かう糸2が通ずる部材である。ヒートン7は支柱10(後記する)に設けられている。ヒートン7が設けられることにより、グリップ1の移動時に、グリップ1が糸2に接触することを避けることができる。
【0047】
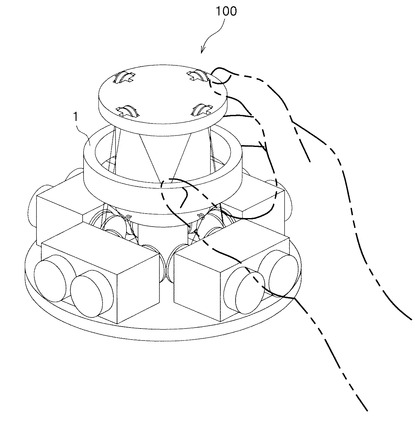
上ベース8及び下ベース9は、支柱10により一体に固定(構成)されている。そして、上ベース8及び下ベース9には、前記のように、各部材が固定されている。また、上ベース8の上表面には、操作者が操作可能な図示しない操作部(ボタン、ホイール等)が設けられている。これにより、図4に示すように、操作者が例えば親指と中指とでグリップ1を把持しつつ、人差し指で例えばボタンを押下することができる。そのため、三次元空間内の対象物の位置制御を行いつつ、例えば、ボタンを押下した時には三次元内で対象物を把持する等の任意の制御を行うことができる。
【0048】
支柱10は、上ベース8及び下ベース9を接続するものであり、前記のように、その周りにはグリップ1が設けられている。そして、支柱10は、エンコーダ付きモータ4に囲まれて位置している。力覚提示装置100における支柱10の高さは10cm程度である。ただし、グリップ1の高さに応じて、適宜変更することが可能である。
【0049】
また、支柱10の太さは、モータマウント6が設けられる近傍の太さが細く、モータマウント6の高さ以上の部位では太くなっている。このようにすることでヒートン7を安定して固定することができ、ヒートン7を通る糸2とヒートン7との摩擦を減少させることができる。また、モータマウント6が設けられる近傍を細くすることで4つのモータマウント6a〜6dを密集させて設けることができ、力覚提示装置100をより小型化することができる。
【0050】
[2.作用]
次に、図3を参照しながら、グリップ1の移動に伴う各糸2の動きを説明する。図3中の上下左右は、図1中の上下左右に対応する。また、図3中の各糸2近傍に示している矢印は、後記するグリップ1移動時の糸2の動く方向を示している。
【0051】
図3には、操作者がグリップ1を白抜き矢印に示す方向に移動させた場合を示している。即ち、グリップ1の固定点1B及び固定点1D近傍を外側から操作者が保持し、図3に示す方向にグリップ1を傾けた場合を示している。つまり、固定点1A及び固定点1Cの位置は変化しないが、固定点1Bの位置は上方向に移動し、固定点1Dの位置は下方向に移動する場合を例示する。
【0052】
操作者がグリップ1を傾ける前は、各エンコーダ付きモータ4は均等な張力で各糸2を引っ張り、グリップ1が宙吊り状態になっている。そして、この状態で操作者がグリップ1を前記の方向に傾けると、固定点1Dの位置が下方向に移動する。そうすると、固定点1Dで固定されている糸2c及び糸2dが下方向に引っ張られる。即ち、この状態においてもエンコーダ付きモータ4は糸2に対して張力を付加している状態であるので、その張力に反して、糸2c及び糸2dがそれぞれプーリ3e及びプーリ3hに捲回される。
【0053】
一方、前記のように、固定点1Bの位置は上方向に移動する。そうすると、固定点1Bで固定されている糸2a及び糸2bが上方向に動く。即ち、この状態においてもエンコーダ付きモータ4は糸2に対して張力を付加している状態であるので、その張力に従って、糸2a及び糸2bがそれぞれプーリ3a及びプーリ3dに捲回される。
【0054】
そして、各糸2の捲回及び引き出しに伴う各プーリ3の回転量をエンコーダ付きモータ4が計測することで、各糸2の移動量(即ち、プーリ3に捲回された糸2の量、及び、プーリ3から引き出された糸2の量)が計測される。即ち、エンコーダ付きモータ4が各プーリ3から各固定点1A〜1Dまでの糸2の長さを計測することになる。
【0055】
なお、図3に示す例においては、グリップ1の左右方向の2端部を単に上下方向に移動させるようにしている。そのため三次元空間内の対象物においても、当該対象物の左部が上方向に、右部が下方向に傾くようになっている。しかしながら、例えばグリップ1の上下方向の位置を変化させずにグリップ1を前方向に移動させれば、前記対象物も前方向に移動するようになる。
【0056】
即ち、前記対象物の移動量及び移動方向は、各糸2の捲回量及び引き出された量によって決定される。そして、これらは、図示しない制御部(例えばCPU(Central Processing Unit)等によって決定される。このようにグリップ1の移動と三次元空間内の対象物の位置制御とを連動させることで、操作者が直観的に操作することができる。
【0057】
[3.固定点の決定方法]
通常は、糸の数が多くなればなるほど、三次元空間内で移動できる空間の広さが拡がることになる。ただ、糸の数が多くなればなるほど、計算式が冗長なものとなる。そこで、本実施形態における糸2(支持部材)の数は少なくとも8本であるため、図5を参照しながら、8本の場合を例に計算式を例示する。ただし、糸2が9本以上の場合でも、以下に説明する式と同様に計算可能である。
【0058】
入力ベクトルと位置・姿勢ベクトルとの関係は通常は非線形であるが、複雑な非線形方程式を解く代わりに、ヤコビアンJの擬似逆行列を用いた逐次近似により位置・姿勢ベクトルを求める。この方法は機構の変更に柔軟に対応でき、汎用性が高い。現在では、更新周波数10kHzという高速な制御を用いることができる。そのため、機構の変更に柔軟に対応できる逐次近似法を用いて力覚ポインタ(グリップ1)の位置・姿勢を求めることができる。
【0059】
以下に、位置・姿勢計算を示す。m個のセンサからの入力ベクトルlと力覚ポインタの位置・姿勢ベクトルrの関係は、通常は非線形の関係となる.
【0060】
【数1】

【0061】
そして、この式(1)を時間微分して線形近似し、ヤコビアン行列(以下、ストリング行列Mと言う。)を用いた逐次計算法で力覚ポインタの位置・姿勢を求める。
【数2】
【0062】
式(2)は通常冗長な連立方程式であるため、解は一意には決定されない。そこで、最小二乗法を用いて式を得、その後Δrで偏微分して解を求める。そして、このようにして得られた解は、
【数3】
となる。ここで、各固有値λiは、それぞれの固有ベクトル方向の感度を表していると言える。つまり、固有値が大きい程、固有ベクトル方向の影響が強まる。よって、各固有値の平均を大きくし、分散が少なくなると計算の忠実性・安定性が良くなると言える。そこで評価関数を、
【数4】
とする。
【0063】
図6に示す従来の力覚提示装置200は、x軸方向とy軸方向とは糸の張り方が等しくなっている事を考慮して、フレームの長さを図5(a)に示すように設定する。なお、グリップの半径はRとする。また、力覚提示装置200における球状のグリップと糸との接続点は、図5(b)のようになっている。そのため、これに倣って、2つずつの糸のペアを図5(b)及び(c)のようにθ、φだけずらす。そして、D、D3、R、θ及びφを5つのパラメタとする。
【0064】
また、力覚提示装置200を使用するとき、グリップは静置時にホームポジションにあるため、今回はグリップがホームポジションにある時の評価関数Jを算出し最適化を行うものとする。
【0065】
具体的には、フレームの位置Qとグリップの位置Pとを行列式で表し、それらを用いて係数行列Mを求める。そして得られた係数行列Mについて、行の交換、列の交換、余因子展開等を用いて固有値を得、評価関数J1を求める。これらの結果得られた評価関数J1は、
【数5】
となる。
【0066】
ここで、計算を簡単なものにするために、図6に示す従来の力覚提示装置200に倣ってθ=φ=0とする。そして、R1=0、R2=R3=0、K1=0、K2=−D3R、K3=DR、L2=(D−R)2+D2+D32であることから、これらを評価関数J1に代入し、さらに三乗根をとって、改めて下記式(6)で表される評価関数J2を得る。そして、評価関数J2の最適化を考える。
【数6】
このとき、R及びDが定数であるとして、D3を最適化する。具体的には、評価関数J2をD3で偏微分し、
【数7】
のときが極大となる。このとき、評価関数J2は、
【数8】
となる。
【0067】
そして、式(8)の分母に注目すれば、R及びDの関係は、
【数9】
の時が最大となる。以上をまとめると、D及びD3の最適値としては、
【数10】
となる。
【0068】
そして、式(10)の結果に基づいた新たな力覚提示装置の形状としては、図1に示す力覚提示装置100になる。即ち、式(10)に基づいて、リング形状のグリップ1の内壁において、グリップ1を上面から見た時に正方形の4頂点で、糸2が固定されるようにすればよいことになる。
【0069】
[4.効果]
本発明者らの検討に拠ると、本実施形態に係る力覚提示装置(図1参照)に拠れば、従来の力覚提示装置(図6参照)と同程度に、三次元空間内で対象物を制御可能である。即ち、本実施形態に係る力覚提示装置は、従来の力覚提示装置と比べて、少なくとも同程度の位置・姿勢計算の忠実性を有している。
【0070】
しかも、本実施形態に係る力覚提示装置に拠れば、従来よりもいっそう小型化可能な力覚提示装置を提供することができる。具体的には、例えば図6に示す従来の力覚提示装置200と比べて、図1に示す力覚提示装置100は、体積比で約27%減少させることができた。そのため、本実施形態に係る力覚提示装置の設置場所が制限されず、様々な場所に設置して利用可能である。
【0071】
具体的には、例えば、本実施形態に係る力覚提示装置をデスク上にノートブック型のパーソナルコンピュータとともに備えることで、パーソナルコンピュータ用マウスと同様に操作性を備えることが可能となる。そして、このように用いることで、従来のパーソナルコンピュータ用マウスと同程度の操作性を有しながらも、パーソナルコンピュータを用いる三次元空間内での対象物の移動の態様が格段に拡がるものとなる。即ち、従来のパーソナルコンピュータ用マウスは、任意の二軸についての並進動作のみが通常は可能であったが、本実施形態に係る力覚提示装置に拠れば、任意の三軸方向の並進及び回転動作が直観的に可能となる。
【0072】
また、機械リンク機構を用いる従来の力覚提示装置においては、本来予定されていた方向以外の力が加わった場合に、接続部分が破損する可能性があった。しかしながら、本実施形態においては支持部材として糸を用いたパラレル駆動機構であるため、そのような可能性が少ない。しかも、弾力性を有する糸を用いることで、操作者による過度の力が糸に加わることを防止することができる。その結果、力覚提示装置の耐久性が向上する。
【0073】
さらに、前記したように、本実施形態に係る力覚提示装置においては、移動指示部材としてリング形状のグリップを用いている。これにより、上ベース8に操作部(ボタン、ホイール等)を設けることができる。その結果、例えば三次元空間内の対象物の移動を制御しつつ、対象物の動作についての新たな制御が可能になる。
【0074】
そして、本実施形態に係る力覚提示装置においては、図1等に示すように、グリップ1と支柱10との間を糸2が通るようになっている。従って、グリップ1の操作時、糸2がグリップ1や操作者の手に接触することがない。そのため、操作者によるグリップ1の操作を、三次元空間内の対象物の移動に対してより正確に追従させることができる。
【0075】
また、グリップ1と支柱10との間に糸2が通るようになっているため、本実施形態に係る力覚提示装置を運搬した場合でも、糸2が絡まることがない。そのため、本実施形態に係る力覚提示装置は、容易に運搬可能である。
【0076】
[5.変更例]
以上、本実施形態に係る力覚提示装置を具体例を挙げて説明したが、本実施形態に係る力覚提示装置は本発明の要旨を逸脱しない範囲で任意に変更して実施可能である。
【0077】
例えば、力覚提示装置100は張力制御手段及び計測手段としてエンコーダ付きモータを用いているが、張力制御手段及び計測手段はエンコーダ付きモータに何ら限定されるものではない。即ち、張力制御手段及び計測手段が一体に設けられる場合、エンコーダ付きモータと同様の機能を有する任意の装置を用いることができる。
【0078】
また、本実施形態においては張力制御手段及び計測手段が一体に設けられているが、これらが別体に設けられていてもよい。即ち、張力制御手段及び計測手段は同一の装置でなくてもよい。具体的には例えば、張力制御手段として糸2に張力を与えられる例えばボイスコイルモータ等を、計測手段として糸2の長さを計測可能な任意のセンサ(例えば光を用いて糸2の長さを計測する光計測センサ)等を用いてもよい。そして、例えばボイスコイルモータと光計測センサとを適宜組み合わせて用いることにより、力覚提示装置をとりわけ小型化することができる。
【0079】
また、力覚提示装置100においては、張力制御手段及び計測手段としてのエンコーダ付きモータ4の全てを下ベース9に設けているが、ガイドプーリ5に代えてエンコーダ付きモータ4を上ベース8に設けるようにしてもよい。即ち、力覚提示装置100において、上方向に向かう糸2a、2b、2c及び2dを、上ベースに設けられるエンコーダ付きモータ4にプーリを介して接続するようにしてもよい。このように構成することで、ガイドプーリにおける糸の摩擦力を減らせることができる。そのため、グリップ1の移動量及び移動方向を、三次元空間内の対象物の制御に対してより正確に反映させることができる。
【0080】
また、力覚提示装置100においては、支持部材として糸を用いているが、支持部材は糸に限定されない。即ち、例えば指示部材としては、例えば紐、繊維等の張力を付加したときに弾性しにくいものを用いればよい。
【0081】
さらに、力覚提示装置100においては、移動指示部材として円筒の一部を用いているが、例えば球の一部をリング形状となるように切断して得られたものであってもよい。また、例えば角を有するリング形状部材であってもよい。即ち、移動指示部材は、必ずしも円筒形状に限定されるものではない。
【0082】
また、上ベース8及び下ベース9の形状も円板形状に制限されず、多角形状等にすることもできる。
【0083】
さらに、グリップ1は、操作者が直接手を触れて操作する必要は必ずしも無い。即ち、操作者が、例えばマジックハンド等の装置を介して間接的にグリップ1を操作するようにしてもよい。
【0084】
また、グリップ1の移動量と前記対象物の移動量とは、必ずしも同じである必要はない。即ち、例えば移動量が1である場合に移動量を10にするように制御してもよいし、移動量が10である場合に移動量を1にするように制御してもよい。
【0085】
さらに、力覚提示装置100を構成する各部材は特に制限されず、容易に破損しないような材料を用いればよい。例えば、支持部材の材料として糸等を用いるほか、把持部材の材料としては樹脂等を用い、その他の部材としては金属等を用いればよい。
【符号の説明】
【0086】
1 グリップ(移動指示部材)
2 糸(支持部材)
3 プーリ
4 エンコーダ付きモータ(張力制御手段、計測手段)
5 ガイドプーリ
6 モータマウント
7 ヒートン
8 上ベース
9 下ベース
10 支柱
1A,1B,1C,1D 固定点
100 力覚提示装置
【技術分野】
【0001】
本発明は、力覚提示装置に関する。
【背景技術】
【0002】
近年、計算機性能の飛躍的な向上により、三次元の仮想現実(Virtual Reality)空間(以下、適宜単に「三次元空間」と言う。)内における対象物(物体)の位置制御が実行可能になってきている。ただ、このような三次元空間内での位置制御に適用可能な例えばパーソナルコンピュータ(PC)用マウス等の二次元空間用位置制御手段は、直観的な操作が困難である。そのため、前記マウスは、三次元空間用位置制御手段としては、未だ不十分である。そこで、三次元空間内位置制御手段として、力覚提示装置(ハプティックインターフェース;Haptic Interface)が注目されてきている。なお、「力覚」とは、力の感覚のことである。
【0003】
力覚提示装置は、三次元空間内で対象物の位置を操作者が制御しつつ、三次元空間内で対象物を把持した時の重み、対象物が障害物に衝突した時の感触等を、操作者が感じ取ることができるようにするものである。そのため、このような力覚提示装置に拠れば、三次元空間内での対象物の位置制御(取扱い)を、より直観的に行うことができる。そして、このような力覚提示装置は、例えば、手術用シミュレータ、組立シミュレータ、遊戯装置等、様々な分野で使用されている。
【0004】
力覚提示装置としては、例えば特許文献1に記載されているものがある。図6は、特許文献1に記載の力覚提示装置を模式的に示す斜視図である。図6に示す力覚提示装置200は立方格子状に形成されている。そして、前記立方格子の8頂点近傍に、それぞれモータ130a〜130h、プーリ160a〜160h及びロータリーエンコーダ170a〜170hが一体となって固定して設けられている。なお、これらは、フレーム120に固定されている。この際、モータ130a〜130h、プーリ160a〜160h及びロータリーエンコーダ170a〜170hは、各手段に追従して一体となって回転するようになっている。
【0005】
前記立方格子の中心付近には、球状のグリップ150が設けられている。そして、グリップ150には8本の糸140a〜140hが接続され、それぞれの糸は各プーリ160a〜160hに捲回されるようになっている。従って、グリップ150を操作者が把持してグリップ150を移動させると、それに追従して、各糸140a〜140gが各プーリ160a〜160hに捲回される。そして、当該糸の捲回量を各ロータリーエンコーダ170a〜170hが計測することにより、グリップ150の移動方向及び回転方向並びに移動量及び回転量が決定される。そして、これらの決定された値に基づいて、三次元空間内の対象物の位置制御が行われるようになっている。
【0006】
また、例えば特許文献2には、グリップとして球殻が用いられている力覚提示装置が記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−282448号公報
【特許文献2】特許4547559号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
例えば図6に示す従来の力覚提示装置は、操作者の意図する方向に意図する量で、三次元空間内での対象物を移動可能である。しかしながら、図6に示す従来の力覚提示装置は、立方格子の各頂点近傍にプーリ等が設けられている。そして、前記立方格子の中心付近に設けられているグリップと前記プーリとが糸を介して接続されている。そのため、力覚提示装置の小型化が困難であるという課題がある。
【0009】
即ち、力覚提示装置の小型化を目的として、例えば立方格子を小型化し、グリップとプーリとを接続する糸の長さを短くした場合、糸の長さが短すぎることがあり、その結果、グリップの移動可能範囲が限られることがある。そのため、三次元空間内の対象物の移動量及び移動方向が制限されることがある。
【0010】
そして、操作者は立方格子中心近傍のグリップを把持するため、通常、立方格子内に操作者が手等を挿入しなければならない。そのため、立方格子の大きさは、少なくとも操作者の手の大きさ以上でなければならず、立方格子の小型化には自ずと限界が生じる。
【0011】
さらに、操作者がグリップを把持してグリップを移動させる際、グリップに接続されている糸がグリップ操作の障害となることがある。即ち、操作者がグリップを把持しようとする際に、糸との接続部分が邪魔になることがあり、把持が困難になることがある。その結果、自在にグリップ移動を行うためには、操作者が過度の負担を強いられることがある。さらには、三次元空間内の対象物の移動量及び移動方向が制限されることもある。
【0012】
また、例えば特許文献2に記載の力覚提示装置においては、球殻のグリップが上ベースと接触することがある。その結果、三次元空間内の対象物の移動量及び移動方向が制限されることがある。また、特にグリップ部分が依然として大きいため、力覚提示装置の小型化の観点からは、未だ不十分である。
【0013】
本発明は前記課題に鑑みて為されたものであり、その目的は、従来よりもいっそう小型化可能な力覚提示装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明者らは前記課題を解決するために鋭意検討した結果、以下の知見を見出した。即ち、本発明の要旨は、操作者によって操作される移動指示部材と、該移動指示部材を宙吊り状態に支持する支持部材と、該支持部材の張力を制御する張力制御手段と、前記支持部材の長さを計測する計測手段と、前記張力制御手段及び前記計測手段に囲まれて位置する支柱と、を備え、前記移動指示部材と前記張力制御手段とは前記支持部材によって接続され、前記操作者により操作される前記移動指示部材の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、前記支持部材は少なくとも8つであり、前記移動指示部材は、前記支柱を囲んで前記支持部材により支持されるリング形状部材であり、隣接する2つの前記支持部材のそれぞれの一端が、前記移動指示部材内壁の同位置に固定されていることを特徴とする、力覚提示装置に関する(請求項1)。
【0015】
この発明に拠れば、従来よりもいっそう自由に、三次元空間内の対象物の移動方向及び移動量を制御することが可能となる。また、従来よりもいっそう正確に、三次元空間内の対象物の移動方向及び移動量を制御することが可能となる。しかも、従来よりもいっそう小型化することができる。
【0016】
また、前記支柱の上端部には上ベースが設けられ、前記支柱の下端部には下ベースが設けられ、前記支柱、前記上ベース及び前記下端部は一体に形成されているとともに、前記張力制御手段及び前記計測手段は、前記上ベース又は前記下ベースに設けられている(請求項2)。
【0017】
この発明に拠れば、張力制御手段及び計測手段の位置を、それらの大きさに併せて任意に設置することができる。そのため、操作者の操作に際して障害となることがないように、張力制御手段及び計測手段を設置することができる。
【0018】
また、全ての前記張力制御手段及び前記計測手段が、下ベースに設けられている(請求項3)。
【0019】
この発明に拠れば、力覚提示装置の小型化が特に要求される分野で、特に好適に使用可能となる。
【0020】
また、このとき、前記張力制御手段及び前記計測手段は、エンコーダ付きモータにより構成されている(請求項4)。
【0021】
この発明に拠れば、張力制御手段及び計測手段を同一の装置を用いて構成することができる。そのため、力覚提示装置のよりいっそうの小型化を図ることができる。
【0022】
さらに、前記支柱の上端部に一体に形成されている上ベースに、操作者が操作可能な操作部が設けられている(請求項5)。
【0023】
この発明に拠れば、操作者が三次元空間内の対象物の移動を行いつつ、操作部を用いた操作を片手で同時行うことができる。その結果、操作の利便性を向上させることができる。
【発明の効果】
【0024】
本発明に拠れば、従来よりもいっそう小型化可能な力覚提示装置を提供することができる。
【図面の簡単な説明】
【0025】
【図1】本実施形態に係る力覚提示装置を模式的に示す斜視図である。
【図2】本実施形態に係る力覚提示装置を模式的に示す上側面図である。
【図3】本実施形態に係る力覚提示装置における、グリップと糸との関係を模式的に示す図である。
【図4】本実施形態に係る力覚提示装置の操作形態を示す図である。
【図5】本実施形態に係る力覚提示装置における計算方法を説明するための図である。
【図6】従来の力覚提示装置を模式的に示す斜視図である。
【発明を実施するための形態】
【0026】
以下、本発明を実施するための形態(本実施形態)を図面を参照しながら説明する。ただし、本発明は以下の実施形態に何ら制限されず、本発明の要旨を逸脱しない範囲内で任意に変更して実施可能である。
【0027】
[1.構成]
本実施形態に係る力覚提示装置の構成を図1(斜視図)及び図2(上側面図)に示す。図1に示す力覚提示装置100は、グリップ1と、糸2と、プーリ3と、エンコーダ付きモータ4と、ガイドプーリ5と、モータマウント6と、ヒートン7と、上ベース8と、下ベース9と、支柱10と、を備えてなる。
【0028】
なお、糸2としての糸2a〜2hは全て同じものであるため、それらの内の一部の説明を省略している。また、プーリ3としてのプーリ3a〜3hも全て同じものであるため、それらの内の一部の説明を省略している。さらに、エンコーダ付きモータ4としてのエンコーダ付きモータ4a〜4hも全て同じものであるため、それらのうちの一部の説明を省略している。そして、ガイドプーリ5としてのガイドプーリ5a〜5hも全て同じものであるため、それらのうちの一部の説明を省略している。また、モータマウント6としてのモータマウント6a〜6hも全て同じものであるため、それらのうちの一部の説明を省略している。
【0029】
グリップ1(移動指示部材)は、操作者によって把持及び移動されることにより、三次元空間内の対象物の位置を制御するものである。グリップ1の形状は、図1に示すようにリング形状である。そしてグリップ1は、上ベース8と下ベース9とを一体に固定する支柱10を囲んで、後記する糸2により宙吊り状態で支持されている。グリップ1の高さは、本実施形態においては2cm程度である。ただし、この長さは適宜変更可能であり、グリップ1を最大限傾けたときに、グリップ1が上ベース8及び下ベース9に接触しない程度の高さに設定すれば良い。
【0030】
グリップ1は、前記のようにリング形状を有している。そのため、従来の球形状のグリップとは異なり、操作者がグリップ1を操作する際、グリップ1が上ベース8(後記する)に接触することがない。従って、グリップ1の移動範囲が制限されず、支柱10に接触しない範囲内で自在に、作業者が三次元空間内の任意の位置に対象物を移動させることができる。
【0031】
糸2(支持部材)は、支柱10(後記する)を囲うようにして、グリップ1を宙吊り状態に支持するものである。この際、糸2はグリップ1の内壁に設けられている固定点1A〜1Dで固定され、グリップ1が支持されるようになっている。そして、力覚提示装置100においては、糸2として8本の糸2a〜2hが備えられ、これらによってグリップ1が支持されるようになっている。
【0032】
なお、本実施形態においては、各固定点1A〜1Dと各プーリ3a〜3h(後記する)との間を、それぞれ、一本の糸2a〜2hとして説明している。従って、例えば、糸2aは、ガイドプーリ5aを介して、固定点1Bとプーリ3aとを接続する糸を表している。
【0033】
糸2による移動指示部材1の具体的な支持方法を、図3を参照しながら説明する。なお、図3中、各糸2近傍に記載している矢印は、後記する[2.動作]において説明する。また、図3においては、図示及び説明の簡略化のために、グリップ1、糸2、プーリ3及びガイドプーリ5のみを示している。
【0034】
図3に示すように、固定点1Aでは、グリップ1から下方向に伸びる糸2e及び2hの一端が固定されている。また、同様に固定点1Cでは、グリップ1から下方向に伸びる糸2f及び2gの一端が固定されている。即ち、隣接する2つの糸のそれぞれの一端が、グリップ1の内壁の同位置(固定点)で固定されている。
【0035】
一方、固定点1Bでは、グリップ1から上方向に伸びる糸2a及び2bの一端が固定されている。ただし、糸2a及び糸2bはいずれも、上ベース8に設けられているガイドプーリ5a及びガイドプーリ5bによって、下方向に向きが変化するようになっている。また、同様に固定点1Dでは、グリップ1から上方向に伸びる糸2c及び2dの一端が固定されている。そして、糸2c及び糸2dについても、上ベース8に設けられているガイドプーリ5c及びガイドプーリ5dによって、下方向に向きが変化するようになっている。
【0036】
力覚提示装置100においては、支持部材としての糸2を8本用いている。そのため、糸2が接続されるプーリ3及びそれと一体に形成されるエンコーダ付きモータ4の数も、8つとなっている。そして、力覚提示装置100を上部から見た場合、リング形状グリップ1内壁において、4つの固定点1A〜1Dは正方形の各頂点になっている。この固定点の位置は計算に拠って決定することができる。この計算方法については、[4.固定点の決定方法]において後記する。
【0037】
プーリ3は、糸2を捲回するものである。具体的には、円筒の両端面にフランジが形成され、両フランジの間に形成される溝に糸2が捲回されるようになっている。そして、プーリ3は、エンコーダ付きモータ4(後記する)と一体となって設けられている。即ち、プーリ3が回転すると、エンコーダ付きモータ4もそれに伴って回転するようになっている。
【0038】
ここで、プーリ3に糸2が捲回されるときの動作を、図1及び図3を参照しながら固定点1A〜1Dで固定されている糸2毎に説明する。前記のように、固定点1Aでは、糸2e及び糸2hの一端が固定されている。そして、糸2e及び糸2hはそれぞれ、ヒートン7a及びヒートン7dを介して、プーリ3b及びプーリ3gに捲回されるようになっている。
【0039】
また、固定点1Bでは、糸2a及び糸2bの一端が固定されている。そして、糸2a及び糸2bはいったん上方向に向かい、その後ガイドプーリ5a及びガイドプーリ5bを介して下方向に向きを変え、プーリ3a及びプーリ4dに捲回されるようになっている。
【0040】
さらに、固定点1Cでは、糸2f及び糸2gの一端が固定されている。そして、糸2f及び糸2gはそれぞれ、ヒートン7b及びヒートン7cを介して、プーリ3c及びプーリ3fに捲回されるようになっている。
【0041】
そして、固定点1Dでは、糸2c及び糸2dの一端が固定されている。そして、糸2c及び糸2dはいったん上方向に向かい、その後ガイドプーリ5c及びガイドプーリ5dを介して下方向に向きを変え、プーリ3e及びプーリ3hに捲回されるようになっている。
【0042】
エンコーダ付きモータ(張力制御手段及び計測手段)4は、糸2の張力を制御するとともに糸2の長さを計測するものである。エンコーダ付きモータ4は、下ベース9に支柱10(後記する)を囲うように設けられている。この際、エンコーダ付きモータ4は2つずつモータマウント6(後記する)によって固定され、4つのモータマウント6が前後左右方向にそれぞれに設けられている。
【0043】
エンコーダ付きモータ4は、前記のように、プーリ3と一体となって固定されている。そのため、エンコーダ付きモータ4は、プーリ3に捲回される糸2の量及び引き出される糸2の量を計測することができるようになっている。また、エンコーダ付きモータ4は、プーリ3を介して、糸2の張力を制御できるようになっている。即ち、即ち、グリップ1とエンコーダ付きモータ4とは、糸2によって間接的に接続されていることになる。
【0044】
ガイドプーリ5は上ベース8に設けられているものである。ガイドプーリ5の構成はプーリ3と同様であるが、糸2の捲回はせず、前記のように糸2の向きを変化させるようになっている。
【0045】
モータマウント6はプーリ3及びエンコーダ付きモータ4を下ベース9に設置するものである。力覚提示装置100においては、2組のプーリ及びエンコーダ付きモータ4を1つのモータマウント6で下ベース9に固定するようになっている。
【0046】
ヒートン7は、各固定点1A〜1Dから直接下方向に向かう糸2が通ずる部材である。ヒートン7は支柱10(後記する)に設けられている。ヒートン7が設けられることにより、グリップ1の移動時に、グリップ1が糸2に接触することを避けることができる。
【0047】
上ベース8及び下ベース9は、支柱10により一体に固定(構成)されている。そして、上ベース8及び下ベース9には、前記のように、各部材が固定されている。また、上ベース8の上表面には、操作者が操作可能な図示しない操作部(ボタン、ホイール等)が設けられている。これにより、図4に示すように、操作者が例えば親指と中指とでグリップ1を把持しつつ、人差し指で例えばボタンを押下することができる。そのため、三次元空間内の対象物の位置制御を行いつつ、例えば、ボタンを押下した時には三次元内で対象物を把持する等の任意の制御を行うことができる。
【0048】
支柱10は、上ベース8及び下ベース9を接続するものであり、前記のように、その周りにはグリップ1が設けられている。そして、支柱10は、エンコーダ付きモータ4に囲まれて位置している。力覚提示装置100における支柱10の高さは10cm程度である。ただし、グリップ1の高さに応じて、適宜変更することが可能である。
【0049】
また、支柱10の太さは、モータマウント6が設けられる近傍の太さが細く、モータマウント6の高さ以上の部位では太くなっている。このようにすることでヒートン7を安定して固定することができ、ヒートン7を通る糸2とヒートン7との摩擦を減少させることができる。また、モータマウント6が設けられる近傍を細くすることで4つのモータマウント6a〜6dを密集させて設けることができ、力覚提示装置100をより小型化することができる。
【0050】
[2.作用]
次に、図3を参照しながら、グリップ1の移動に伴う各糸2の動きを説明する。図3中の上下左右は、図1中の上下左右に対応する。また、図3中の各糸2近傍に示している矢印は、後記するグリップ1移動時の糸2の動く方向を示している。
【0051】
図3には、操作者がグリップ1を白抜き矢印に示す方向に移動させた場合を示している。即ち、グリップ1の固定点1B及び固定点1D近傍を外側から操作者が保持し、図3に示す方向にグリップ1を傾けた場合を示している。つまり、固定点1A及び固定点1Cの位置は変化しないが、固定点1Bの位置は上方向に移動し、固定点1Dの位置は下方向に移動する場合を例示する。
【0052】
操作者がグリップ1を傾ける前は、各エンコーダ付きモータ4は均等な張力で各糸2を引っ張り、グリップ1が宙吊り状態になっている。そして、この状態で操作者がグリップ1を前記の方向に傾けると、固定点1Dの位置が下方向に移動する。そうすると、固定点1Dで固定されている糸2c及び糸2dが下方向に引っ張られる。即ち、この状態においてもエンコーダ付きモータ4は糸2に対して張力を付加している状態であるので、その張力に反して、糸2c及び糸2dがそれぞれプーリ3e及びプーリ3hに捲回される。
【0053】
一方、前記のように、固定点1Bの位置は上方向に移動する。そうすると、固定点1Bで固定されている糸2a及び糸2bが上方向に動く。即ち、この状態においてもエンコーダ付きモータ4は糸2に対して張力を付加している状態であるので、その張力に従って、糸2a及び糸2bがそれぞれプーリ3a及びプーリ3dに捲回される。
【0054】
そして、各糸2の捲回及び引き出しに伴う各プーリ3の回転量をエンコーダ付きモータ4が計測することで、各糸2の移動量(即ち、プーリ3に捲回された糸2の量、及び、プーリ3から引き出された糸2の量)が計測される。即ち、エンコーダ付きモータ4が各プーリ3から各固定点1A〜1Dまでの糸2の長さを計測することになる。
【0055】
なお、図3に示す例においては、グリップ1の左右方向の2端部を単に上下方向に移動させるようにしている。そのため三次元空間内の対象物においても、当該対象物の左部が上方向に、右部が下方向に傾くようになっている。しかしながら、例えばグリップ1の上下方向の位置を変化させずにグリップ1を前方向に移動させれば、前記対象物も前方向に移動するようになる。
【0056】
即ち、前記対象物の移動量及び移動方向は、各糸2の捲回量及び引き出された量によって決定される。そして、これらは、図示しない制御部(例えばCPU(Central Processing Unit)等によって決定される。このようにグリップ1の移動と三次元空間内の対象物の位置制御とを連動させることで、操作者が直観的に操作することができる。
【0057】
[3.固定点の決定方法]
通常は、糸の数が多くなればなるほど、三次元空間内で移動できる空間の広さが拡がることになる。ただ、糸の数が多くなればなるほど、計算式が冗長なものとなる。そこで、本実施形態における糸2(支持部材)の数は少なくとも8本であるため、図5を参照しながら、8本の場合を例に計算式を例示する。ただし、糸2が9本以上の場合でも、以下に説明する式と同様に計算可能である。
【0058】
入力ベクトルと位置・姿勢ベクトルとの関係は通常は非線形であるが、複雑な非線形方程式を解く代わりに、ヤコビアンJの擬似逆行列を用いた逐次近似により位置・姿勢ベクトルを求める。この方法は機構の変更に柔軟に対応でき、汎用性が高い。現在では、更新周波数10kHzという高速な制御を用いることができる。そのため、機構の変更に柔軟に対応できる逐次近似法を用いて力覚ポインタ(グリップ1)の位置・姿勢を求めることができる。
【0059】
以下に、位置・姿勢計算を示す。m個のセンサからの入力ベクトルlと力覚ポインタの位置・姿勢ベクトルrの関係は、通常は非線形の関係となる.
【0060】
【数1】
【0061】
そして、この式(1)を時間微分して線形近似し、ヤコビアン行列(以下、ストリング行列Mと言う。)を用いた逐次計算法で力覚ポインタの位置・姿勢を求める。
【数2】
【0062】
式(2)は通常冗長な連立方程式であるため、解は一意には決定されない。そこで、最小二乗法を用いて式を得、その後Δrで偏微分して解を求める。そして、このようにして得られた解は、
【数3】
となる。ここで、各固有値λiは、それぞれの固有ベクトル方向の感度を表していると言える。つまり、固有値が大きい程、固有ベクトル方向の影響が強まる。よって、各固有値の平均を大きくし、分散が少なくなると計算の忠実性・安定性が良くなると言える。そこで評価関数を、
【数4】
とする。
【0063】
図6に示す従来の力覚提示装置200は、x軸方向とy軸方向とは糸の張り方が等しくなっている事を考慮して、フレームの長さを図5(a)に示すように設定する。なお、グリップの半径はRとする。また、力覚提示装置200における球状のグリップと糸との接続点は、図5(b)のようになっている。そのため、これに倣って、2つずつの糸のペアを図5(b)及び(c)のようにθ、φだけずらす。そして、D、D3、R、θ及びφを5つのパラメタとする。
【0064】
また、力覚提示装置200を使用するとき、グリップは静置時にホームポジションにあるため、今回はグリップがホームポジションにある時の評価関数Jを算出し最適化を行うものとする。
【0065】
具体的には、フレームの位置Qとグリップの位置Pとを行列式で表し、それらを用いて係数行列Mを求める。そして得られた係数行列Mについて、行の交換、列の交換、余因子展開等を用いて固有値を得、評価関数J1を求める。これらの結果得られた評価関数J1は、
【数5】
となる。
【0066】
ここで、計算を簡単なものにするために、図6に示す従来の力覚提示装置200に倣ってθ=φ=0とする。そして、R1=0、R2=R3=0、K1=0、K2=−D3R、K3=DR、L2=(D−R)2+D2+D32であることから、これらを評価関数J1に代入し、さらに三乗根をとって、改めて下記式(6)で表される評価関数J2を得る。そして、評価関数J2の最適化を考える。
【数6】
このとき、R及びDが定数であるとして、D3を最適化する。具体的には、評価関数J2をD3で偏微分し、
【数7】
のときが極大となる。このとき、評価関数J2は、
【数8】
となる。
【0067】
そして、式(8)の分母に注目すれば、R及びDの関係は、
【数9】
の時が最大となる。以上をまとめると、D及びD3の最適値としては、
【数10】
となる。
【0068】
そして、式(10)の結果に基づいた新たな力覚提示装置の形状としては、図1に示す力覚提示装置100になる。即ち、式(10)に基づいて、リング形状のグリップ1の内壁において、グリップ1を上面から見た時に正方形の4頂点で、糸2が固定されるようにすればよいことになる。
【0069】
[4.効果]
本発明者らの検討に拠ると、本実施形態に係る力覚提示装置(図1参照)に拠れば、従来の力覚提示装置(図6参照)と同程度に、三次元空間内で対象物を制御可能である。即ち、本実施形態に係る力覚提示装置は、従来の力覚提示装置と比べて、少なくとも同程度の位置・姿勢計算の忠実性を有している。
【0070】
しかも、本実施形態に係る力覚提示装置に拠れば、従来よりもいっそう小型化可能な力覚提示装置を提供することができる。具体的には、例えば図6に示す従来の力覚提示装置200と比べて、図1に示す力覚提示装置100は、体積比で約27%減少させることができた。そのため、本実施形態に係る力覚提示装置の設置場所が制限されず、様々な場所に設置して利用可能である。
【0071】
具体的には、例えば、本実施形態に係る力覚提示装置をデスク上にノートブック型のパーソナルコンピュータとともに備えることで、パーソナルコンピュータ用マウスと同様に操作性を備えることが可能となる。そして、このように用いることで、従来のパーソナルコンピュータ用マウスと同程度の操作性を有しながらも、パーソナルコンピュータを用いる三次元空間内での対象物の移動の態様が格段に拡がるものとなる。即ち、従来のパーソナルコンピュータ用マウスは、任意の二軸についての並進動作のみが通常は可能であったが、本実施形態に係る力覚提示装置に拠れば、任意の三軸方向の並進及び回転動作が直観的に可能となる。
【0072】
また、機械リンク機構を用いる従来の力覚提示装置においては、本来予定されていた方向以外の力が加わった場合に、接続部分が破損する可能性があった。しかしながら、本実施形態においては支持部材として糸を用いたパラレル駆動機構であるため、そのような可能性が少ない。しかも、弾力性を有する糸を用いることで、操作者による過度の力が糸に加わることを防止することができる。その結果、力覚提示装置の耐久性が向上する。
【0073】
さらに、前記したように、本実施形態に係る力覚提示装置においては、移動指示部材としてリング形状のグリップを用いている。これにより、上ベース8に操作部(ボタン、ホイール等)を設けることができる。その結果、例えば三次元空間内の対象物の移動を制御しつつ、対象物の動作についての新たな制御が可能になる。
【0074】
そして、本実施形態に係る力覚提示装置においては、図1等に示すように、グリップ1と支柱10との間を糸2が通るようになっている。従って、グリップ1の操作時、糸2がグリップ1や操作者の手に接触することがない。そのため、操作者によるグリップ1の操作を、三次元空間内の対象物の移動に対してより正確に追従させることができる。
【0075】
また、グリップ1と支柱10との間に糸2が通るようになっているため、本実施形態に係る力覚提示装置を運搬した場合でも、糸2が絡まることがない。そのため、本実施形態に係る力覚提示装置は、容易に運搬可能である。
【0076】
[5.変更例]
以上、本実施形態に係る力覚提示装置を具体例を挙げて説明したが、本実施形態に係る力覚提示装置は本発明の要旨を逸脱しない範囲で任意に変更して実施可能である。
【0077】
例えば、力覚提示装置100は張力制御手段及び計測手段としてエンコーダ付きモータを用いているが、張力制御手段及び計測手段はエンコーダ付きモータに何ら限定されるものではない。即ち、張力制御手段及び計測手段が一体に設けられる場合、エンコーダ付きモータと同様の機能を有する任意の装置を用いることができる。
【0078】
また、本実施形態においては張力制御手段及び計測手段が一体に設けられているが、これらが別体に設けられていてもよい。即ち、張力制御手段及び計測手段は同一の装置でなくてもよい。具体的には例えば、張力制御手段として糸2に張力を与えられる例えばボイスコイルモータ等を、計測手段として糸2の長さを計測可能な任意のセンサ(例えば光を用いて糸2の長さを計測する光計測センサ)等を用いてもよい。そして、例えばボイスコイルモータと光計測センサとを適宜組み合わせて用いることにより、力覚提示装置をとりわけ小型化することができる。
【0079】
また、力覚提示装置100においては、張力制御手段及び計測手段としてのエンコーダ付きモータ4の全てを下ベース9に設けているが、ガイドプーリ5に代えてエンコーダ付きモータ4を上ベース8に設けるようにしてもよい。即ち、力覚提示装置100において、上方向に向かう糸2a、2b、2c及び2dを、上ベースに設けられるエンコーダ付きモータ4にプーリを介して接続するようにしてもよい。このように構成することで、ガイドプーリにおける糸の摩擦力を減らせることができる。そのため、グリップ1の移動量及び移動方向を、三次元空間内の対象物の制御に対してより正確に反映させることができる。
【0080】
また、力覚提示装置100においては、支持部材として糸を用いているが、支持部材は糸に限定されない。即ち、例えば指示部材としては、例えば紐、繊維等の張力を付加したときに弾性しにくいものを用いればよい。
【0081】
さらに、力覚提示装置100においては、移動指示部材として円筒の一部を用いているが、例えば球の一部をリング形状となるように切断して得られたものであってもよい。また、例えば角を有するリング形状部材であってもよい。即ち、移動指示部材は、必ずしも円筒形状に限定されるものではない。
【0082】
また、上ベース8及び下ベース9の形状も円板形状に制限されず、多角形状等にすることもできる。
【0083】
さらに、グリップ1は、操作者が直接手を触れて操作する必要は必ずしも無い。即ち、操作者が、例えばマジックハンド等の装置を介して間接的にグリップ1を操作するようにしてもよい。
【0084】
また、グリップ1の移動量と前記対象物の移動量とは、必ずしも同じである必要はない。即ち、例えば移動量が1である場合に移動量を10にするように制御してもよいし、移動量が10である場合に移動量を1にするように制御してもよい。
【0085】
さらに、力覚提示装置100を構成する各部材は特に制限されず、容易に破損しないような材料を用いればよい。例えば、支持部材の材料として糸等を用いるほか、把持部材の材料としては樹脂等を用い、その他の部材としては金属等を用いればよい。
【符号の説明】
【0086】
1 グリップ(移動指示部材)
2 糸(支持部材)
3 プーリ
4 エンコーダ付きモータ(張力制御手段、計測手段)
5 ガイドプーリ
6 モータマウント
7 ヒートン
8 上ベース
9 下ベース
10 支柱
1A,1B,1C,1D 固定点
100 力覚提示装置
【特許請求の範囲】
【請求項1】
操作者によって操作される移動指示部材と、
該移動指示部材を宙吊り状態に支持する支持部材と、
該支持部材の張力を制御する張力制御手段と、
前記支持部材の長さを計測する計測手段と、
前記張力制御手段及び前記計測手段に囲まれて位置する支柱と、
を備え、
前記移動指示部材と前記張力制御手段とは前記支持部材によって接続され、
前記操作者により操作される前記移動指示部材の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、
前記支持部材は少なくとも8つであり、
前記移動指示部材は、前記支柱を囲んで前記支持部材により支持されるリング形状部材であり、
隣接する2つの前記支持部材のそれぞれの一端が、前記移動指示部材内壁の同位置に固定されている
ことを特徴とする、力覚提示装置。
【請求項2】
前記支柱の上端部には上ベースが設けられ、前記支柱の下端部には下ベースが設けられ、前記支柱、前記上ベース及び前記下端部は一体に形成されているとともに、
前記張力制御手段及び前記計測手段は、前記上ベース又は前記下ベースに設けられている
ことを特徴とする、請求項1に記載の力覚提示装置。
【請求項3】
全ての前記張力制御手段及び前記計測手段が、下ベースに設けられている
ことを特徴とする、請求項2に記載の力覚提示装置。
【請求項4】
前記張力制御手段及び前記計測手段は、エンコーダ付きモータにより構成されている
ことを特徴とする、請求項1〜3の何れか1項に記載の力覚提示装置。
【請求項5】
前記支柱の上端部に一体に形成されている上ベースに、操作者が操作可能な操作部が設けられている
ことを特徴とする、請求項1〜4の何れか1項に記載の力覚提示装置。
【請求項1】
操作者によって操作される移動指示部材と、
該移動指示部材を宙吊り状態に支持する支持部材と、
該支持部材の張力を制御する張力制御手段と、
前記支持部材の長さを計測する計測手段と、
前記張力制御手段及び前記計測手段に囲まれて位置する支柱と、
を備え、
前記移動指示部材と前記張力制御手段とは前記支持部材によって接続され、
前記操作者により操作される前記移動指示部材の移動量及び移動方向に応じて、三次元空間内における対象物の位置が制御される力覚提示装置であって、
前記支持部材は少なくとも8つであり、
前記移動指示部材は、前記支柱を囲んで前記支持部材により支持されるリング形状部材であり、
隣接する2つの前記支持部材のそれぞれの一端が、前記移動指示部材内壁の同位置に固定されている
ことを特徴とする、力覚提示装置。
【請求項2】
前記支柱の上端部には上ベースが設けられ、前記支柱の下端部には下ベースが設けられ、前記支柱、前記上ベース及び前記下端部は一体に形成されているとともに、
前記張力制御手段及び前記計測手段は、前記上ベース又は前記下ベースに設けられている
ことを特徴とする、請求項1に記載の力覚提示装置。
【請求項3】
全ての前記張力制御手段及び前記計測手段が、下ベースに設けられている
ことを特徴とする、請求項2に記載の力覚提示装置。
【請求項4】
前記張力制御手段及び前記計測手段は、エンコーダ付きモータにより構成されている
ことを特徴とする、請求項1〜3の何れか1項に記載の力覚提示装置。
【請求項5】
前記支柱の上端部に一体に形成されている上ベースに、操作者が操作可能な操作部が設けられている
ことを特徴とする、請求項1〜4の何れか1項に記載の力覚提示装置。
【図1】

【図2】

【図3】
【図4】
【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−256201(P2012−256201A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−128822(P2011−128822)
【出願日】平成23年6月9日(2011.6.9)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月9日(2011.6.9)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]