
力覚提示装置
【課題】ユーザに直感的な力覚を提示可能な力覚提示装置を提供する。
【解決手段】力覚提示装置は、本体と、第1の可動部と、第1の駆動機構とを具備する。
上記本体は、第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む。上記第1の可動部は、上記把持部の少なくとも一部を被覆し、上記本体に対して上記第1の軸と交差する第2の軸方向へ変位可能である。上記第1の駆動機構は、上記本体に設けられ、上記本体に対して上記第1の可動部を上記第2の軸方向へ変位させることで上記第1の軸及び上記第2の軸に各々に交差する第3の軸回りのモーメントを上記把持部に発生させる。
【解決手段】力覚提示装置は、本体と、第1の可動部と、第1の駆動機構とを具備する。
上記本体は、第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む。上記第1の可動部は、上記把持部の少なくとも一部を被覆し、上記本体に対して上記第1の軸と交差する第2の軸方向へ変位可能である。上記第1の駆動機構は、上記本体に設けられ、上記本体に対して上記第1の可動部を上記第2の軸方向へ変位させることで上記第1の軸及び上記第2の軸に各々に交差する第3の軸回りのモーメントを上記把持部に発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、ユーザに力覚を提示する力覚提示装置に関する。
【背景技術】
【0002】
従来、ユーザに対して力覚を提示することが可能な種々の装置が知られている。例えば軸の周りに傾動、回動可能な操作レバー、この操作レバーを傾動、回動させるためのモータ、障害物との距離等を検出するセンサ、モータを制御する制御部等を備えたジョイスティックが知られている。この技術では、ジョイスティックは、車椅子やクレーンに取り付けられて用いられ、ジョイスティックが障害物に近づいたことをセンサが検出したとき等に、制御部がモータの回転を制御することで、ユーザの操作する力に対する反力をユーザに付与することが可能に構成されている(特許文献1 段落0008,0009,0022参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−59934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した技術では、ジョイスティックは、例えば車椅子やクレーンに取り付けられて用いられる接地型の装置であり、非接地型の装置ではない。非接地型の電子機器として、例えばゲーム等で用いられる空間操作型のコントローラが知られている。このようなコントローラでは、ゲームのリアリティー向上のためにゲーム中に直感的な力覚をユーザに提示することが望まれている。
【0005】
以上のような事情に鑑み、本技術の目的は、ユーザに直感的な力覚を提示可能な力覚提示装置を提供することにある。
【課題を解決するための手段】
【0006】
本技術の一形態に係る力覚提示装置は、本体と、第1の可動部と、第1の駆動機構とを具備する。
上記本体は、第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む。
上記第1の可動部は、上記把持部の少なくとも一部を被覆し、上記本体に対して上記第1の軸と交差する第2の軸方向へ変位可能である。
上記第1の駆動機構は、上記本体に設けられ、上記本体に対して上記第1の可動部を上記第2の軸方向へ変位させることで上記第1の軸及び上記第2の軸に各々に交差する第3の軸回りのモーメントを上記把持部に発生させる。
【0007】
上記力覚提示装置は、第1の駆動機構により、本体に対して第1の可動部を第2の軸方向へ変位させることで第3の軸回りのモーメントを把持部に発生させることができるので、把持部を把持するユーザに直感的な力覚を提示することができる。
【0008】
上記第1の駆動機構は、上記第1の軸方向に離間して配置された複数の駆動源を有するようにしてもよい。これにより、第1の軸方向に離間した位置で第1の可動部に力を付与し第1の可動部を第2の軸方向へ変位させることができる。
【0009】
上記第1の可動部は、上記第1の軸方向に長手方向を有する板状部材であり、上記第1の駆動機構は、上記複数の駆動源の駆動により上記第3の軸回りに上記板状部材を傾動させることが可能な傾動機構部をさらに有するようにしてもよい。これにより、傾動機構部により第3の軸回りに板状部材を傾動させ、第3の軸回りのモーメントを把持部に発生させることができる。
【0010】
上記板状部材は、上記第1の軸方向に相互に離間する第1の端部と第2の端部とを有してもよい。この場合、上記傾動機構部は、第1の駆動源と、第2の駆動源と、連結部とを有する。上記第1の駆動源は、上記第1の端部を移動させることが可能である。上記第2の駆動源は、上記第2の端部を上記第1の端部の移動方向とは反対方向へ移動させることが可能である。上記連結部は、上記第1の駆動源と上記第2の駆動源との間に配置され、上記板状部材を上記第3の軸に平行な軸回りに回動可能に支持する。
【0011】
一方、上記第1の可動部は、上記第1の軸方向に長手方向を有する第1の板状部材と、上記本体を挟んで上記第1の板状部材と上記第2の軸方向に対向する第2の板状部材とを有してもよい。この場合、上記第1の駆動機構は、上記複数の駆動源の駆動により上記第3の軸回りに上記第1の板状部材及び上記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む。
【0012】
これにより、第3の軸回りに第1の板状部材及び第2の板状部材をそれぞれ傾動させ、第3の軸回りのモーメントを把持部に発生させることができるので、ユーザにより直感的な力覚を提示することができる。
【0013】
上記第1の可動部は、上記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、上記第1の駆動機構は、直動機構部を含んでもよい。上記直動機構部は、上記複数の駆動源の駆動により上記第1の板状部材と上記第2の板状部材とを上記第2の軸方向に沿って相互に逆方向に移動させる。
【0014】
これにより、第1の板状部材と、第2の板状部材とを第2の軸方向に沿って相互に逆方向に移動させることができ、把持部に第3の軸周りのモーメントを発生させることができる。
【0015】
上記第1の可動部は、上記本体を挟んで上記第1の板状部材と対向する第3の板状部材と、上記本体を挟んで上記第2の板状部材と対向する第4の板状部材とをさらに有してもよい。この場合、上記第1の駆動機構は、上記第3の板状部材を上記第1の板状部材と同一方向へ移動させ、上記第4の板状部材を上記第2の板状部材と同一方向へ移動させる。
【0016】
これにより、第1〜第4の板状部材を用いて第3の軸周りのモーメントの大きさをより大きくすることができ、より直感的な力覚をユーザに提示することができる。
【0017】
上記複数の駆動源は、直動式アクチュエータで構成されるようにしてもよい。これにより、直動シリンダにより第1の可動部に力を付与し、第1の可動部を変位させることができる。
【0018】
上記複数の駆動源は、振動モータで構成されるようにしてもよい。これにより、振動モータにより第1の可動部を振動させることで、ユーザに直感的な力覚を提示することができる。
【0019】
上記力覚提示装置は、第2の可動部と、第2の駆動機構とをさらに具備してもよい。上記第2の可動部は、上記把持部の他の一部を被覆し、上記本体に対して上記第3の軸方向へ変位可能である。
上記第2の駆動機構は、上記本体に設けられ、上記本体に対して上記第2の可動部を上記第3の軸方向へ変位させることで上記第2の軸回りのモーメントを上記把持部に発生させる。
【0020】
これにより、複数の軸周りのモーメントを把持部に発生させることができるので、ユーザにより多様な力覚を提示することができる。
【発明の効果】
【0021】
以上のように本技術によれば、ユーザに直感的な力覚を提示することができる。
【図面の簡単な説明】
【0022】
【図1】本技術の第1の実施形態に係る力覚提示装置を用いたシステム構成を示す図である。
【図2】図1に示す力覚提示装置がユーザに把持された状態を示す斜視図である。
【図3】図2に示す力覚提示装置の斜視図である。
【図4】図3に示す力覚提示装置の側面図である。
【図5】図4に示す力覚提示装置の可動部の一状態を示す側面図である。
【図6】図4に示す力覚提示装置の可動部の他の状態を示す側面図である。
【図7】図4に示す力覚提示装置の一動作例を説明するフローチャートである。
【図8】本技術の第2の実施形態に係る力覚提示装置の斜視図である。
【図9】図8に示す力覚提示装置の側面図である。
【図10】図9に示す力覚提示装置の一状態を示す側面図である。
【図11】図9に示す力覚提示装置の他の状態を示す側面図である。
【図12】本技術の第3の実施形態に係る力覚提示装置を示す斜視図である。
【図13】図12に示す力覚提示装置の側面図である。
【図14】図13に示す力覚提示装置の一状態を示す側面図である。
【図15】図13に示す力覚提示装置の他の状態を示す側面図である。
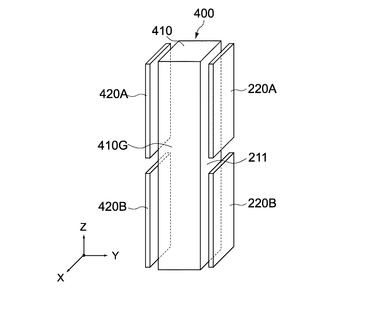
【図16】本技術の第4の実施形態に係る力覚提示装置を示す斜視図である。
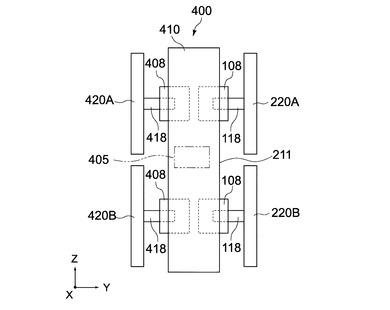
【図17】図16に示す力覚提示装置の側面図である。
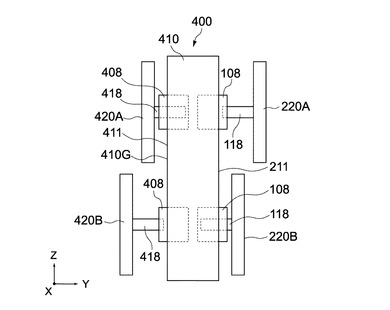
【図18】図17に示す力覚提示装置の一状態を示す側面図である。
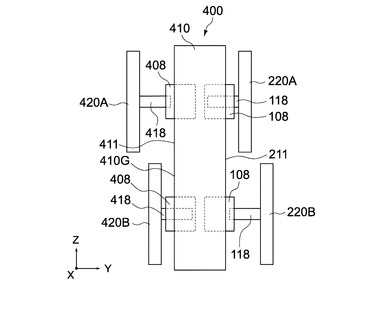
【図19】図17に示す力覚提示装置の他の状態を示す側面図である。
【図20】本技術の第5の実施形態に係る力覚提示装置を示す斜視図である。
【図21】本技術の第6の実施形態に係る力覚提示装置を示す斜視図である。
【図22】本技術の第7の実施形態に係る力覚提示装置の把持された状態を示す斜視図である。
【図23】図22に示す力覚提示装置の斜視図である。
【図24】図23に示す力覚提示装置の本体を示す斜視図である。
【図25】図23に示す力覚提示装置の複数の可動部を示す斜視図である。
【図26】図23に示す力覚提示装置の可動部の可動状態を示す側面図である。
【図27】第1の変形例の力覚提示装置を説明するための図である。
【図28】第2の変形例の力覚提示装置を説明するための図である。
【図29】図28に示す力覚提示装置を説明するための図である。
【発明を実施するための形態】
【0023】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
<第1の実施形態>
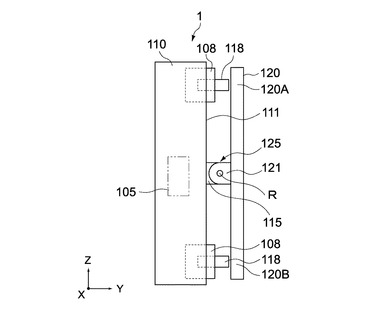
図1は、本技術の第1の実施形態に係る力覚提示装置を用いたシステム構成を示す図、図2は、図1に示す力覚提示装置がユーザに把持された状態を示す斜視図である。図3は、図2に示す力覚提示装置1の斜視図、図4は、図3に示す力覚提示装置1の概略側面図であり、説明を分かり易くするため要部の構成は誇張して示されている。なお図3,4においてX,Y,Z軸は、互いに直交する3軸方向をそれぞれ示している。
【0024】
本実施形態の力覚提示装置1は、例えば制御装置2と、あるいは制御装置2及び表示装置3と組み合わされることで、力覚提示システムを構成することが可能である。
【0025】
(力覚提示装置)
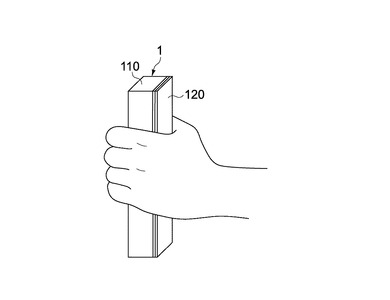
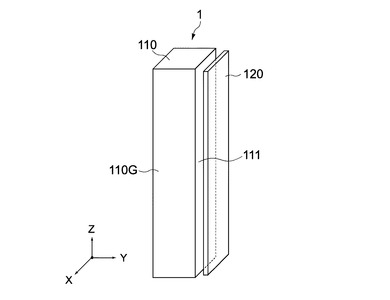
力覚提示装置1は、ユーザが把持できる大きさであり(図2参照)、例えばZ軸方向に長手方向を有する略直方体形状である。本実施形態において、力覚提示装置1は、主として、ゲームに用いられる空間操作型のコントローラとして構成されている。力覚提示装置1は、空間内でユーザが力覚提示装置1を動かしたとき、この移動に関する情報を含む操作信号を生成し、制御装置2へ送信するように構成されている。力覚提示装置1は、後述するように制御装置2から信号を受信し、この信号に応じてユーザに力覚を提示可能に構成されている。
【0026】
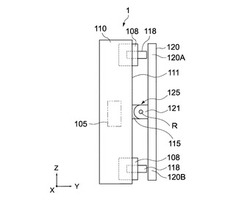
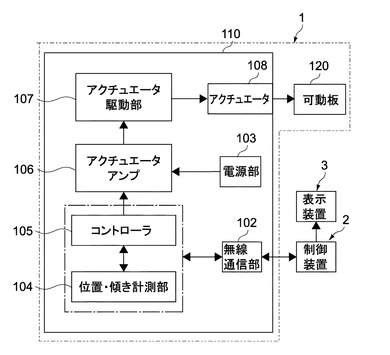
力覚提示装置1は、ユーザに把持される把持部110Gを有する本体110と、後述する可動板120(第1の可動部)とを備えている。本体110は、Z軸方向に長手方向を有する略四角柱状に形成されている。本体110の内部には、無線通信部102と、電源部103と、位置・傾き計測部104と、制御部105と、アクチュエータアンプ106と、アクチュエータ駆動部107と、複数の駆動源としての複数のアクチュエータ108A,108B(以下、個別に説明する場合を除き、アクチュエータ108と総称する。)とが収容されている。
【0027】
本体110は、Z軸方向に長手方向を有する略直方体で形成されている。制御部105、アクチュエータ駆動部107、複数のアクチュエータ108等は、本体110に対して可動板120をY軸方向へ変位させることで把持部110GにX軸回りのモーメントを発生させる「第1の駆動機構」を構成する。
【0028】
無線通信部102は、制御装置2の無線通信部との間で双方向の通信を可能とする無線通信モジュールで構成されるが、有線通信でもよい。通信方式は特に制限されず、「ZigBee」(登録商標)、「Bluetooth」(登録商標)などの機器間通信でもよいし、インターネットを経由した通信でもよい。
【0029】
電源部103は、力覚提示装置1の電源を構成し、本体110内部の各部へ必要な電力を供給する。電源部103は、典型的にはバッテリで構成される。バッテリは一次電池でもよいし、二次電池でもよい。また電源部103は、太陽電池で構成されてもよい。なお、有線やワイヤレス給電の場合、電源部103は不要である。
【0030】
位置・傾き計測部104は、空間内で操作される力覚提示装置1の位置、傾き等を計測するためのセンサを含む。センサとして、典型的には、加速度センサ、角速度センサが挙げられる。位置・傾き計測部104は、X、Y及びZの各軸方向の本体110の動きを検出可能に構成されるが、その構成は特に限定されない。例えば、各方向に沿って加速度センサが配置されてもよいし、単数又は複数の角速度センサを組み合わせて構成されてもよい。その他、地磁気センサや圧力センサ等が併用されてもよい。
【0031】
無線通信部102、電源部103、位置・傾き計測部104等は、本体110の内部ではなく、力覚提示装置1の外部装置として構成されてもよい。
【0032】
制御部105は、ROM、RAM、CPU(MPU)を含むコンピュータで構成され、無線通信部102を介して例えばゲームの各種情報を取得可能に構成されている。このゲームの各種情報には、例えばユーザの操作対象(例えば野球ゲームにおけるバット、釣りゲームにおける釣竿、料理ゲームにおけるフライパン等)と、この操作対象に力を付与する物体(例えば上記各種ゲームにおけるボール、魚、具材等)との間の当たり判定の結果情報が含まれる。ここで上記当たり判定とは、画面において上記操作対象と上記物体とが接触等の所定の関係にあるかどうかの判定をいう。
【0033】
制御部105は、位置・傾き計測部104の出力信号を取得しこの出力信号に基づいて操作信号を生成し、無線通信部102に出力可能に構成されている。この位置・傾き計測部104の出力信号には、位置・傾き計測部104で計測された本体110の加速度、角速度、これらの値を用いて演算されたユーザの操作対象の位置等の本体110の動きに関する情報が含まれる。この操作信号は、無線通信部102により制御装置2へ送信される。
【0034】
制御部105は、無線通信部102を介して取得したゲームの各種情報(上記の当たり判定の結果情報を含む。)に基づき、アクチュエータアンプ106に所定の駆動信号を出力するように構成されている。
【0035】
アクチュエータアンプ106は、制御部105から受信した駆動信号を増幅してアクチュエータ駆動部107に出力するように構成されている。
【0036】
アクチュエータ駆動部107は、アクチュエータアンプ106からの駆動信号に基づいて複数のアクチュエータ108に駆動信号を出力する。
【0037】
複数のアクチュエータ108は、アクチュエータ駆動部107からの駆動信号に基づいて駆動し、本体110に対して可動板120を変位させることができるように構成されている。
【0038】
可動板120は、把持部110Gの一部を被覆し、本体110の側面111側に設けられている。可動板120は、本体110に対してY軸方向に変位可能に構成されている。
【0039】
本実施形態において可動板120は、本体110の長手方向と同じZ軸方向に長手方向を有する板状部材であり、連結部125を介して本体110に対して傾動可能に支持されている。連結部125と、複数のアクチュエータ108は、可動板120をX軸回りに傾動させるための「傾動機構部」を構成する。
【0040】
連結部125は、可動板120をX軸に平行な軸Rの周りに回動可能に支持している。連結部125は、本体110に設けられた連結突部115と、可動板120に設けられた連結突部121とを有する。連結突部115は、本体110の側面111側に側面111から突出するように設けられ、連結突部115は、本体110の長手方向の中央に設けられている。連結突部121は、可動板120の長手方向の中央に設けられている。連結突部121は、可動板120の長手方向の両端部である第1の端部120Aと第2の端部120Bとが側面111に近づいたり離れたりすることが可能となるように連結突部115に連結されている。
【0041】
複数のアクチュエータ108は、本体110の側面111側に埋設されるように設けられている。複数のアクチュエータ108は、Z軸方向に相互に離間して本体110の両端部に配設された2つのアクチュエータ108A(第1の駆動源),108B(第2の駆動源)で構成される。一方のアクチュエータ108Aは、可動板120の第1の端部120Aを移動させ、他方のアクチュエータ108Bは、可動板120の第2の端部120Bを移動させる。
【0042】
各アクチュエータ108A,108Bは、駆動軸118A,118Bを有する。各駆動軸118A,118Bは、本体110の側面111に直交するY軸方向に移動可能に設けられている。各駆動軸118は、図3、図4に示す初期位置に位置するときに、例えば各駆動軸118の先端が可動板120に当接するように調整されている。各駆動軸118が初期位置に位置しているときに、可動板120は筐体101の側面111に対して平行に配置されている。
【0043】
アクチュエータ108A,108Bには、例えば、直動モータや直動シリンダ等の直動式アクチュエータが用いられる。各駆動軸118A,118Bの移動量は、例えばアクチュエータ108A,108Bに通電される電流によって制御される。各駆動軸118A,118Bの移動の方向は、例えばアクチュエータ108に通電される電流の向きによって制御される。なお後述するように、アクチュエータ108として、ボイスコイルモータ等の振動モータが用いられてもよい。
【0044】
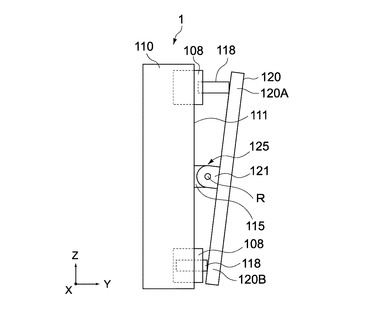
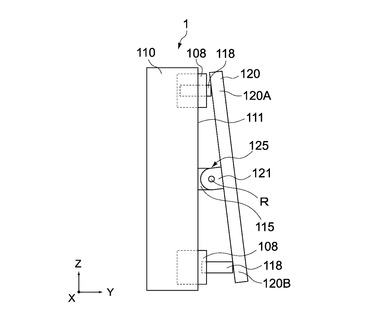
図5は、図4に示す力覚提示装置1の第1の可動部120の一状態を示す側面図、図6は、図4に示す力覚提示装置1の第1の可動部120の他の状態を示す側面図である。
【0045】
制御部105は、複数の駆動軸118A,118Bのうち一方の駆動軸118AをY軸方向プラス向き(図中右方)に移動させるときは、他方の駆動軸118をY軸方向マイナス向き(図中左方)に移動させるようにアクチュエータ108A,108Bを駆動する。これにより、図5に示すように可動板120の第1の端部120Aが本体110の側面111から離れ、可動板120の第2の端部120Bが本体110の側面111に近づくことで、可動板120が図5にように本体110の側面111に対して斜めに傾いた状態となる。
【0046】
同様に、制御部105は、一方の駆動軸118AをY軸方向マイナス向きに移動させるときは、他方の駆動軸118BをY軸方向プラス向きに移動させるようにアクチュエータ108A,108Bを駆動する。これにより、図6に示すように可動板120第1の端部120Aが本体110の側面111に近づき、可動板120の第2の端部120Bが本体110の側面111から離れることで、可動板120が図6に示すように本体110の側面111に対して斜めに傾いた状態となる。
【0047】
(制御装置)
制御装置2は、例えば、ビデオRAMと、表示制御部と、MPUと、RAMと、ROMと、無線通信部とを有する。
制御装置2の無線通信部は、例えばゲームの各種の情報を含む信号を力覚提示装置1に送信可能に構成されていると共に、力覚提示装置1から送信された後述する操作信号を受信可能に構成されている。MPUは、力覚提示装置1からの操作信号を解析し、RAM、及びROMに格納された各種設定値及びプログラムを用いて各種の演算処理を行う。演算処理の一例として、MPUは、この操作信号に基づいて、表示装置3の画面に表示されるユーザの操作対象の位置を算出(更新)する。表示制御部は、MPUの制御に応じて、主に、表示装置3の画面に表示するための画面データを生成する。画面データとしては、ポインタ、アイコン、ゲームにおけるユーザの操作対象等の画面データが含まれる。ビデオRAMは、表示制御部の作業領域となり、生成された画面データを一時的に格納する。
制御装置2は、例えばゲーム機器であるが、力覚提示装置1に専用の機器であってもよいし、PC(パーソナルコンピュータ)等の一般的な情報処理装置であってもよい。また、制御装置2は、表示装置3と一体となったコンピュータであってもよい。制御装置2による制御対象機器は、オーディオ/ビジュアル機器、プロジェクタ、カーナビゲーション機器等であってもよい。
【0048】
(表示装置)
表示装置3は、例えば制御装置2からの出力情報に基づいて画面に例えばユーザの操作対象の画像等を表示する。表示装置3は、例えば液晶ディスプレイ、EL(Electro-Luminescence)ディスプレイ等が挙げられるが、これらに限られない。表示装置3は、テレビジョン放送等を受信できるディスプレイと一体となった装置でもよい。表示装置3は、画面上に3次元映像を表示することが可能な、例えば3Dテレビジョンで構成されてもよい。
【0049】
(動作)
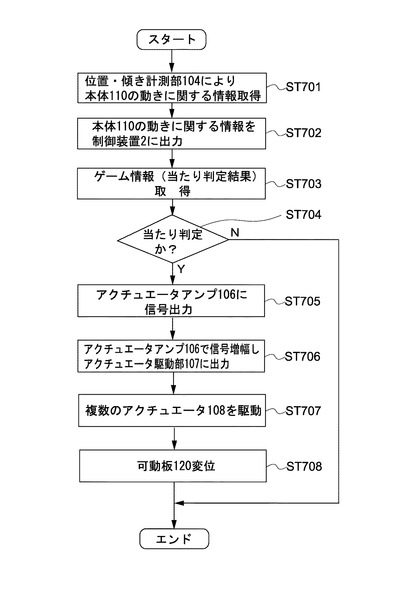
図7は、図4に示す力覚提示装置1の一動作例を説明するフローチャートである。
本動作例は、例えば種々のゲームにおけるユーザの操作対象(例えばバット、釣竿、フライパン等)と、この操作対象に力を付与する物体(例えばボール、魚、具材等、以下、当たり判定対象、という。)との間の当たり判定の結果に応じて、力覚提示装置1が可動板120を変位させることで、ユーザに力覚を提示する動作例について説明する。
【0050】
ユーザは、可動板120の上から本体110の把持部110Gを把持して、表示装置3の画面に表示される映像を見ながら、力覚提示装置1を空中で操作する。制御部105は、位置・傾き計測部104から、本体110の動きに関する情報を取得する(ST701)。この動きに関する情報には、例えばユーザの操作対象の位置、力覚提示装置1の加速度、角速度等の情報が含まれている。
【0051】
制御部105は、ST701で取得した動きに関する情報に基づき、ユーザの操作対象の最新の位置を演算し、この位置等の情報を無線通信部102を介して制御装置2に送信する(ST702)。
【0052】
一方、制御装置2では、ST702で力覚提示装置1から送信された信号を受信し、ユーザの操作対象の位置を更新する。また、制御装置2では、当たり判定対象の位置を演算し更新する。そして、制御装置2は、これら2つの位置情報及び画像データを表示装置3に送信する。これにより、表示装置3の画面の所定の位置に更新されたユーザの操作対象と、更新された当たり判定対象とが表示される。制御装置2では、例えば更新されたユーザの操作対象の位置と、更新された当たり判定対象の位置とが同じであるか否かを判定し(当たり判定)、当たり判定の結果情報を力覚提示装置1に送信する。
【0053】
制御部105は、無線通信部102を介して、制御装置2から当たり判定の結果情報等を含むゲームの各種の情報を取得する(ST703)。
【0054】
制御部105は、ST703で取得した当たり判定の結果情報に基づき、制御装置2での当たり判定結果が肯定判定か否かを判定する(ST704)。ST704で否定判定のときには、処理を終了し、ST704で肯定判定のときには、ST705に進む。
【0055】
ST704で当たりと判定したときには、制御部105は、アクチュエータアンプ106へ所定の駆動信号を出力する(ST705)。具体的には、この所定の駆動信号には、複数の駆動軸118の移動量、移動方向等の情報が含まれている。このとき、制御部105は、両方の駆動軸118の移動速度及び移動量が同じになると共に、移動の向きが反対になるように駆動信号を出力する。
【0056】
アクチュエータアンプ106は、制御部105から受信したこれらの駆動信号を増幅してアクチュエータ駆動部107に出力する(ST706)。
【0057】
アクチュエータ駆動部107は、アクチュエータアンプ106からの駆動信号に基づいて駆動信号を生成して複数のアクチュエータ108に出力する(ST707)。これにより、一方の駆動軸118が所定の長さY軸方向プラス向きに移動すると共に他方の駆動軸118を同じ所定の長さY軸方向マイナス向きに移動したり、一方の駆動軸118が所定の長さY軸方向マイナス向きに移動すると共に他方の駆動軸118を同じ所定の長さY軸方向プラス向きに移動したりする。
【0058】
これにより、図5又は図6に示すように一方又は他方の駆動軸118が可動板120に力を付与することで、可動板120は、軸Rを中心として回動する(ST708)。このようにして、軸Rを中心とした力のモーメントが把持部110Gに発生する。
【0059】
このように本実施形態の力覚提示装置1は、本体110と、本体110に対してY軸方向に変位可能に設けられた第1の可動部120と、第1の可動部120をY軸方向に変位させることで、X軸周りのモーメントを把持部120Aに発生させる複数のアクチュエータ108と、複数のアクチュエータ108の駆動を制御する制御部105とを備える。力覚提示装置1は、例えばゲームにおいて、ユーザの操作対象(例えばバット)と、当たり判定対象(例えばボール)との間の当たり判定の結果に基づき、複数の駆動軸118を駆動し、可動板120の両端部の位置をY軸方向に変位させる。これにより、把持部110GにX軸回りのモーメントを発生させて、力覚提示装置1を把持するユーザに対して直感的な力覚を提示することができる。また、表示映像に準じて力覚提示装置1にモーメントを発生させることができるので、操作性の向上とより臨場感の高いインタラクションを実現することができる。
【0060】
また、複数のアクチュエータ108がZ軸方向に離間して本体110の長手方向の両端部に配設されている。このため、複数の駆動軸118A,118Bにより可動板120の第1の端部120A、第2の端部120Bに直接的に力を付与することができるので、確実に可動板120を軸Rを回動軸としてY軸方向に変位させることができる。
【0061】
ゲームにおける具体例としては、ユーザの操作対象がゲームにおけるバットやラケットであり、バットやラケットに力を付与する物体がボールである場合が挙げられる。この場合には、バットやラケットにボールがヒットしたときに(当たりの判定)、その反力に相当するモーメントが把持部110Gに発生するように可動板120を傾動させる。これにより、ボールを打つ瞬間のリアリティーのある力覚をユーザに提示することができる。
【0062】
また、ゲームにおけるユーザの操作対象が釣竿であり、釣竿に力を付与する物体が魚である場合には、魚がヒットしたときに、第1の端部120Aを下方へ引き込むような回転力(モーメント)を本体110に作用させるべく、可動板120の位置を変位させる。この際、対象とする魚の種類等に応じて大きさの異なるモーメントが発生するようにアクチュエータ108の駆動力を制御することで、ユーザに対しよりリアリティーのある力覚を提示することができる。
【0063】
また、力覚提示装置1を各種のトレーニング用のゲームのために用いるようにしてもよい。
例えば、ドラム等の打楽器を練習するためのゲームに用いることができる。具体的には、表示装置3の表示画面にドラムの画像を表示しておき、スティックの代わりに力覚提示装置1を用いる。この場合、ゲームにおけるユーザの操作対象がスティックであり、スティックに力を付与する物体がドラムである。そして、ドラムにスティックが当たったときに(当たりの判定)、その反力に相当するモーメントが把持部110Gに発生するように可動板120を傾動させることで、実際のドラム演奏の練習と同様のリアリティーのある力覚をユーザに提示することができる。特に、現実のドラム等の楽器の練習においては、楽器の準備が大掛かりになるが、力覚提示装置1を用いることで、ドラムの練習を容易に行うことができる。
【0064】
また、力覚提示装置1は、料理の練習をするためのゲームにも用いることができる。具体的には、表示装置3の表示画面に野菜等の食材と、まな板と、包丁とを表示しておき、ユーザは包丁の代わりに力覚提示装置1を用いる。ゲームにおけるユーザの操作対象が包丁であり、包丁に力を付与する物体が野菜やまな板である。この場合には、包丁に野菜やまな板が当たったときに(当たりの判定)、食材の種類やまな板の質感に応じたモーメントが把持部110Gに発生するように可動板120を傾動させることで、ユーザに食材を切る瞬間のリアリティーのある力覚を提示することができる。特に、現実に料理の練習においては、食材が有限であるが、力覚提示装置1を用いることで、何回でも反復してリアリティーのある練習することができる。
【0065】
<第2の実施形態>
図8は、本技術の第2の実施形態に係る力覚提示装置の斜視図、図9は、図8に示す力覚提示装置の側面図であり、説明を分かり易くするため要部の構成は誇張して示されている。なお、本実施形態では、上記実施形態に比べて、複数のアクチュエータの配設位置及び可動部の構成が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0066】
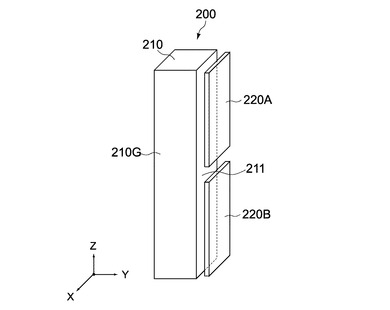
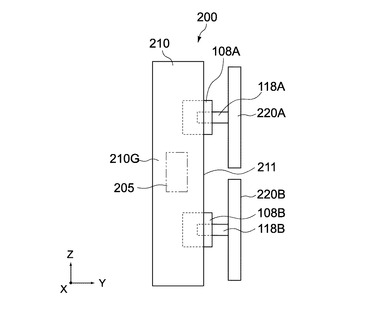
本実施形態の力覚提示装置200は、第1の実施形態の本体110と同様に構成された本体210を有する。本体210には複数のアクチュエータ108A,108Bと制御部205等が設けられている。制御部205は、制御部105と同様の構成を有し、複数のアクチュエータ108A,108Bの駆動を制御する。アクチュエータ108A,108Bの駆動軸118A,118Bの先端には、それぞれ第1の可動板220A、第2の可動板220Bが接続されている。第1,第2の可動板220A,220Bは、ともに板状形状を有した板状部材(第1の可動部)であり、本体210の把持部210Gの一部を被覆する。第1,第2の可動板220A,220Bは、本体210の長手方向(図9のZ軸方向)に離間して、本体210の側面211に平行になるように配設されている。
【0067】
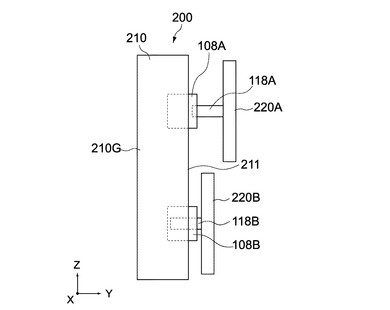
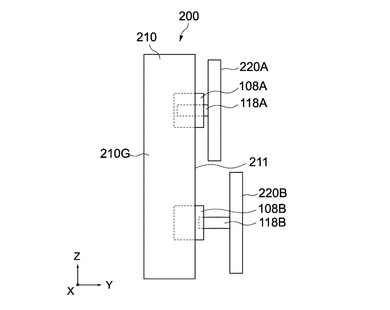
図10は、図9に示す力覚提示装置200の一状態を示す側面図、図11は、図9に示す力覚提示装置200の他の状態を示す側面図である。
制御部205は、アクチュエータ108A,108Bの駆動軸118A,118Bを相互に逆方へ移動させる(直線機構部)。すなわち制御部205は、図10に示すように駆動軸118AをY軸方向プラス向きに移動させるときには駆動軸118BをY軸方向マイナス向きに移動させ、図11に示すように駆動軸118AをY軸方向マイナス向きに移動させるときには駆動軸118BをY軸方向プラス向きに移動させる。これにより第1,第2の可動板220A,220Bは相互に逆方向へ移動し、X軸回りに時計方向あるいは反時計方向へのモーメントを把持部210Gに発生させる。
【0068】
本実施形態によれば、上述の第1の実施形態と同様の作用効果を得ることができるので、本体210の操作に応じた所定の力覚をユーザに提示することができる。
【0069】
本実施形態の力覚提示装置200において、第1の可動板220Aのみ、あるいは第2の可動板220BのみがY軸方向へ移動するように構成されてもよい。これにより、ユーザに局所的に力を付与することができる。また、このとき、力覚提示装置200の把持部210Gに力のモーメントを発生させることができる。
【0070】
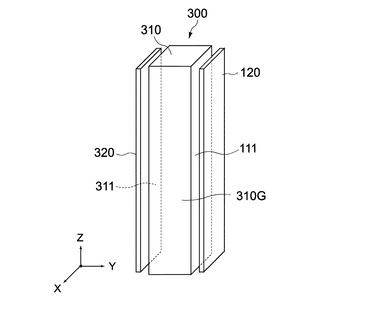
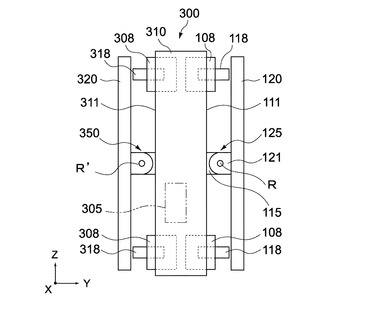
<第3の実施形態>
図12は、本技術の第3の実施形態に係る力覚提示装置を示す斜視図、図13は、図12に示す力覚提示装置の側面図、図14は、図13に示す力覚提示装置の一状態を示す側面図、図15は、図13に示す力覚提示装置の他の状態を示す側面図である。各図において、説明を分かり易くするため要部の構成は誇張して示されている。
【0071】
本実施形態の力覚提示装置300は、本体310を挟んでY軸方向に相互に対向した配置された第1の可動板120と第2の可動板320とを有する。力覚提示装置300は、第2の可動板320に動力を伝達可能な複数のアクチュエータ308と、アクチュエータ108,308の駆動を制御する制御部305とを備えている。制御部305は、制御部105と同様の構成を有し、上記以外の構成は上記第1の実施形態と同様に構成されているので、同一の部材等には同一の符号を付し、説明を省略する。
【0072】
第2の可動板320は、Z軸方向に長手方向を有する板状部材であり、長手方向の両端部の位置が本体310の側面111側とは反対側の側面311に対して変位可能となるように本体310の側面311側に設けられている。第2の可動板320は、本体310に対して軸R’の回りに回動可能に連結部350で連結されている。複数のアクチュエータ308は第2の可動板320の両端部をY軸方向に押動可能に本体310にそれぞれ配置され、それらの駆動は制御部305によって制御される。
【0073】
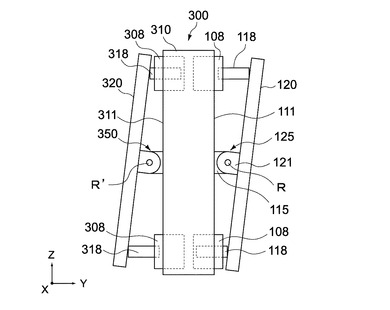
図14は、図13に示す力覚提示装置300の一状態を示す側面図、図15は、図13に示す力覚提示装置300の他の状態を示す側面図である。
制御部305は、第1の可動板120を駆動する2つのアクチュエータ108の駆動軸118を相互に逆方向へ移動させ、第2の可動板320を駆動する2つのアクチュエータ308の駆動軸318を相互に逆方向へ移動させる。また制御部305は、アクチュエータ108,308の駆動軸118,318を相互に逆方向へ移動させる。
【0074】
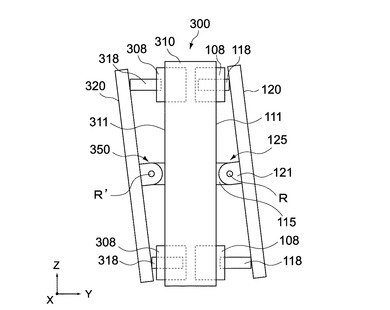
すなわち制御部305は、図14に示すように第1の可動板120を軸Rの回りに時計方向へ傾動させるときには、第2の可動板320をも軸R’の回りに時計方向へ傾動させるようにアクチュエータ108,308を駆動する。一方、制御部305は、図15に示すように第1の可動板120を軸Rの回りに反時計方向へ傾動させるときには、第2の可動板320をも軸R’の回りに反時計方向へ傾動させるようにアクチュエータ108,308を駆動する。これによりX軸回りに時計方向あるいは反時計方向へのモーメントを本体310の把持部310Gに発生させることが可能となる。
【0075】
以上のように構成される本実施形態の力覚提示装置300によれば、第1の実施形態と同様の作用効果を得ることができるので、本体310の操作に応じた所定の力覚をユーザに提示することができる。本実施形態によれば、本体310を挟むように2つの可動板120,320がそれぞれ配置されているため、ユーザによって把持される領域をこれら可動板で占める領域が大きくなる。これによりユーザへ的確に所望の力覚を提示することが可能となる。
【0076】
<第4の実施形態>
図16は、本技術の第4の実施形態に係る力覚提示装置を示す斜視図、図17は、図16に示す力覚提示装置の側面図、図18は、図17に示す力覚提示装置の一状態を示す側面図、図19は、図17に示す力覚提示装置の他の状態を示す側面図である。なお、本実施形態では、第2の実施形態と同様に構成されているので、同一の部材等には同一の符号を付し、説明を省略する。また各図において、説明を分かり易くするため要部の構成は誇張して示されている。
【0077】
力覚提示装置400は、本体410を挟んで第1の可動板220AとY軸方向に対向する第3の可動板420Aと、本体410を挟んで第2の可動板220BとY軸方向に対向する第4の可動板420Bとを有する。力覚提示装置400は、第1,第2の可動板220A,220Bに動力を伝達可能な複数のアクチュエータ108のほか、第3,第4の可動板420A,420Bに動力を伝達可能な複数のアクチュエータ408と、アクチュエータ108,408の駆動を制御する制御部405とを備えている。制御部405は、制御部105と同様の構成を有し、上記以外の構成は上記第1の実施形態と同様に構成されている。
【0078】
第3の可動板420Aと第4の可動板420Bは、Z軸方向に相互に離間するように本体410の側面411にそれぞれ配置された板状部材で構成される。本体410には、これら第3,第4の可動板420A,420Bにそれぞれ連結された駆動軸418をそれぞれ有する複数のアクチュエータ408が設けられている。
【0079】
制御部405は、第1,第2の可動板220A,220Bを駆動する2つのアクチュエータ108の駆動軸118を相互に逆方向へ移動させ、第3,第4の可動板420A,420Bを駆動する2つのアクチュエータ408の駆動軸418を相互に逆方向へ移動させる。また制御部405は、第3の可動板420Aを駆動するアクチュエータ408の駆動軸418を第1の可動板220Aを駆動するアクチュエータ108の駆動軸118と同一方向へ移動させ、第4の可動板420Bを駆動するアクチュエータ408の駆動軸418を第2の可動板220Bを駆動するアクチュエータ108の駆動軸118と同一方向へ移動させる。
【0080】
以上のように構成される本実施形態の力覚提示装置400によれば、第2の実施形態と同様の作用効果を得ることができるので、本体410の操作に応じた所定の力覚をユーザに提示することができる。本実施形態によれば、本体410を挟むように4つの可動板220A,220B,420A,420Bがそれぞれ配置されているため、ユーザによって把持される領域をこれら可動板で占める領域が大きくなる。これによりユーザへ的確に所望の力覚を提示することが可能となる。
【0081】
<第5の実施形態>
図20は、本技術の第5の実施形態に係る力覚提示装置を示す斜視図である。
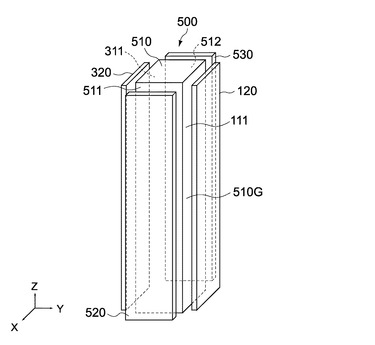
本実施形態の力覚提示装置500は、Z軸方向に長手方向を有する略四角柱状の本体510を有する。本体510の相対向する一方の2つの側面111、側面311と、相対向する他方の2つの側面511,512とを有する。側面111,311には第1の可動板120,320(第1の可動部)がそれぞれ取り付けられ、側面511,512には第2の可動板520,530(第2の可動部)がそれぞれ取り付けられている。各可動板は、本体510の把持部を全周にわたって被覆し、各可動板の略中央部がユーザにより把持される把持部510Gを形成する。
【0082】
可動板120,320,520,530はそれぞれほぼ同一の構成を有しており、Z軸方向に長手方向を有する長方形状に形成されている。各々の可動板120,320,520,530は、第1及び第3の実施形態で説明した可動板と同様に構成されており、長手方向の略中央部において図示しない連結部を介して本体510に対して傾動可能に取り付けられている。この例では、第1の可動板120,320は、本体410に対してX軸のまわりに傾動し、第2の可動板520,530は、本体410に対してY軸のまわりに傾動するように構成される。
【0083】
本体510の内部には、各可動板を上述のように傾動させる図示しない複数のアクチュエータと、これら複数のアクチュエータの駆動を制御する図示しない制御部が設けられている。複数のアクチュエータは、例えば、本体510の4側面の各端部に計8個設けられている。上記制御部は、制御装置2(図1)から送信される制御信号に基づいて複数のアクチュエータのうち任意のアクチュエータを駆動する。例えば、力覚提示装置500に対してX軸回りのモーメントを発生させる場合には、上述の第3の実施形態と同様に第1の可動板120,320を所定の向きへ傾動させるように、対応する複数のアクチュエータを駆動する。一方、力覚提示装置500に対してY軸回りのモーメントを発生させる場合には、第2の可動板520,530を所定の向きへ傾動させるように、対応する複数のアクチュエータを駆動する。
【0084】
以上のように、本実施形態の力覚提示装置500によれば、相互に直交する2軸(X軸、Y軸)のまわりに所定の大きさのモーメントを発生させることができ、より高機能で複合的な操作感をユーザへ提供することが可能となる。
【0085】
また本実施形態によれば、本体510の全周囲が可動板120,320,520,530で被覆されているため、ユーザに把持される力覚提示装置500の姿勢に大きく依存せず、所望の向きのモーメントをユーザへ提示することが可能となる。
【0086】
<第6の実施形態>
図21は、本技術の第6の実施形態に係る力覚提示装置を示す斜視図である。
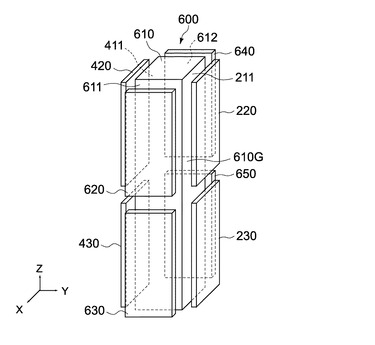
本実施形態の力覚提示装置600は、Z軸方向に長手方向を有する略四角柱状の本体610を有する。本体610の相対向する一方の2つの側面211、側面411と、相対向する他方の2つの側面611,612とを有する。側面211,411には第1の可動板220,230,420,430(第1の可動部)がそれぞれ取り付けられ、側面611,612には第2の可動板620,630,640,650(第2の可動部)がそれぞれ取り付けられている。各可動板は、本体610の把持部を全周にわたって被覆し、各可動板の略中央部がユーザにより把持される把持部610Gを形成する。
【0087】
可動板220,230,420,430,620,630,640,650はそれぞれほぼ同一の構成を有しており、Z軸方向に長手方向を有する長方形状に形成されている。各々の可動板は、第2及び第4の実施形態で説明した可動板と同様に構成されており、Y軸方向あるいはX軸方向にそれぞれ移動可能に本体610に取り付けられている。この例では、第1の可動板220,230,420,430は、本体610に対してY軸方向に移動可能であり、第2の可動板620,630,640,650は、本体610に対してX軸方向に移動可能に構成される。
【0088】
本体610の内部には、各可動板を上述のように移動させる図示しない複数のアクチュエータと、これら複数のアクチュエータの駆動を制御する図示しない制御部が設けられている。複数のアクチュエータは、例えば、本体610の4側面の所定位置に計8個設けられている。上記制御部は、制御装置2(図1)から送信される制御信号に基づいて複数のアクチュエータのうち任意のアクチュエータを駆動する。例えば、力覚提示装置600に対してX軸回りのモーメントを発生させる場合には、上述の第4の実施形態と同様に第1の可動板220,230,420,430を所定の向きへ移動させるように、対応する複数のアクチュエータを駆動する。一方、力覚提示装置600に対してY軸回りのモーメントを発生させる場合には、第2の可動板620,630,640,650を所定の向きへ移動させるように、対応する複数のアクチュエータを駆動する。
【0089】
以上のように、本実施形態の力覚提示装置600によれば、相互に直交する2軸(X軸、Y軸)のまわりに所定の大きさのモーメントを発生させることができ、より高機能で複合的な操作感をユーザへ提供することが可能となる。
【0090】
また本実施形態によれば、本体610の全周囲が可動板220,230,420,430,620,630,640,650で被覆されているため、ユーザに把持される力覚提示装置600の姿勢に大きく依存せず、所望の向きのモーメントをユーザへ提示することが可能となる。
【0091】
<第7の実施形態>
図22は、本技術の第7の実施形態に係る力覚提示装置の把持された状態を示す斜視図である。図23は、図22に示す力覚提示装置の斜視図である。本実施形態では、上記第5の実施形態に比べて、本体の形状及び複数の可動部の形状が異なるので、同一の部材等には同一の符号を付しその説明を省略し,異なる箇所を中心に説明する。
【0092】
本実施形態の力覚提示装置700は、Z軸方向に長手方向を有していると共に、ユーザが把持可能な略円柱形状を有している。
【0093】
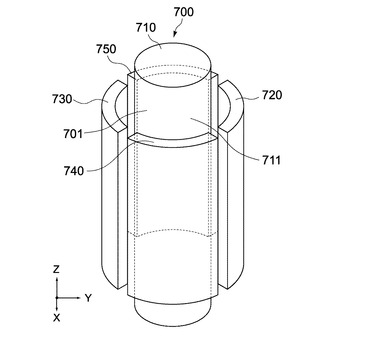
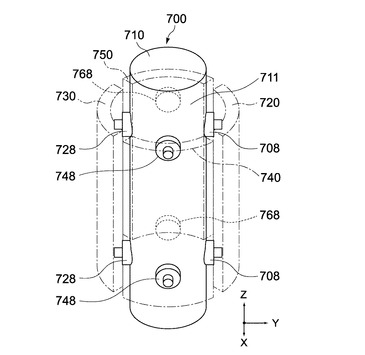
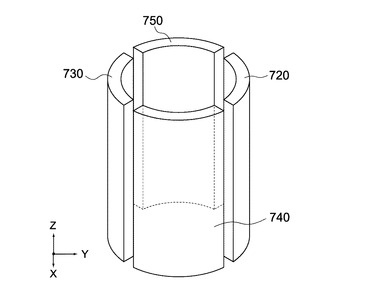
本実施形態の力覚提示装置700は、円柱形状の本体710と、本体710に対して変位可能に設けられた第1の可動板720、第2の可動板730、第3の可動板740及び第4の可動板750とを有する。これらの可動板は、Z軸方向に長手方向を有し、本体710と同心的な円弧状に形成されている。
【0094】
図24は、図23に示す力覚提示装置700の本体710を示す斜視図である。
本体710の側周面711には、本体710を挟んでY軸方向に対向する複数のアクチュエータ708,728と、本体710を挟んでX軸方向に対向する複数のアクチュエータ748,768とをそれぞれ有する。アクチュエータ708は、Z軸方向に離間してそれぞれ一対配置され、第1の可動板720に連結される。同様に、アクチュエータ728,748,768はZ軸方向に離間してそれぞれ一対ずつ配置され、第2の可動板730、第3の可動板740及び第4の可動板750にそれぞれ連結される。各可動板720,730,740,750は、本体710に対して図示しない連結部を介して傾動可能に支持される。
【0095】
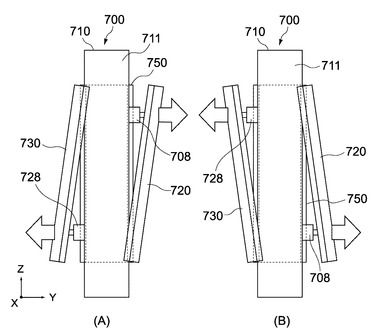
図25は、図23に示す力覚提示装置700の第1〜第4の可動板720,730,740,750を示す斜視図、図26(A),(B)は、図23に示す力覚提示装置700の第1の可動板720及び第2の可動板730の可動状態を示す側面図である。なお、図26では、第3の可動部740の図示を省略した。
【0096】
第1の可動板720及び第2の可動板730は、第3の実施形態と同様に、X軸回りに同一方向へ傾動することで、X軸を中心とする所定のモーメントを発生させる。一方、第3の可動板740及び第4の可動板750は、Y軸回りに同一方向へ傾動することで、Y軸を中心とする所定のモーメントを発生させる。これにより第5の実施形態と同様の作用が得られ、X軸及びY軸の2軸回りのモーメントをユーザへ提示することができる。
【0097】
本実施形態の力覚提示装置700は略円柱形状を有しているため、ユーザにとって把持しやすく、例えばバットやラケット、釣竿等を握ったときの感覚を提示することができる。さらに、上記複数のアクチュエータの駆動力を適宜の大きさに調整することで、操作時において把持部に硬質性や柔軟性を付与することも可能となる。
【0098】
<第1の変形例>
図27は、当該実施形態の第1の変形例の力覚提示装置を説明するための図である。なお、図27では、説明を分かり易くするために第1の可動板720、第2の可動板730、第3の可動板740及び第4の可動板750の図示を省略した。
【0099】
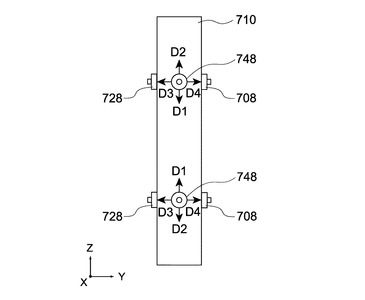
本変形例では、上記第7の実施形態に比べて、複数のアクチュエータ708、728、748、768は、本体710の側周面711上において本体710の長手方向及びこの長手方向に直交する方向(図27に示す矢印方向)に、電気的に又は手動で移動可能に設けられている。
【0100】
このような構成によれば、複数のアクチュエータ708、728、748、768の位置を本体710の長手方向の中央位置に近づける方向D1に移動させると、アクチュエータが同一のストロークで駆動される場合、可動板720,730,740,750の変位量を大きくすることができる。つまり、各可動部の傾きをより大きくすることができる。一方、上記アクチュエータの位置を本体710の両端に近づける方向D2に移動させると、各稼動板の変位量を小さくできる。また、上記アクチュエータの位置を側周面711に沿う方向D3又は方向D4へ移動させることで、Z軸回りのモーメントを発生させるようにしてもよい。このように、同一のアクチュエータで、異なる大きさのモーメントを発生させることが可能となり、多様な力覚をユーザに提示することができる。
【0101】
<第2の変形例>
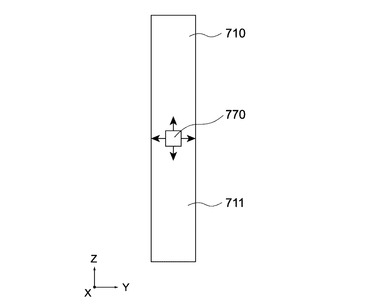
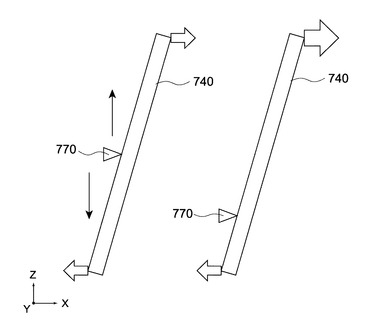
図28は、当該実施形態の第2の変形例の力覚提示装置を説明するための図、図29は、図28に示す力覚提示装置を説明するための図である。なお、図28においては、本体710と、第3の可動部740とを連結する連結部770を除く構成については、上記第1の変形例と同様であるので、図示を省略した。
【0102】
図28、図29では、連結部770を模式的に示したが、連結部770は、上記実施形態と同様に、本体710に設けられた連結突部と、可動板740に設けられた連結突部とがY軸に平行な同一の軸を回動軸として連結されている。本変形例では、連結部770の位置は、本体710の側周面711上において本体710の長手方向及びこの長手方向に直交する方向(図28に示す矢印方向)に、電気的に又は手動で移動可能に構成されている。
【0103】
具体的には、図29に示すように、連結部770の位置が本体710の長手方向(Z軸方向)の中央に位置しているときには、アクチュエータ748の駆動軸のうち一方の駆動軸が所定の長さ伸び、他方の駆動軸が所定の長さ縮む(図27参照)。このとき、連結部770の軸の周りの力のモーメントの大きさは、可動板740の両端部で同じ大きさとなる。これに対して、連結部770の位置が本体710の長手方向(Z軸方向)の中央から一方に(図29では下方に)ずらされているときには、例えば一方のアクチュエータ748の位置を長手方向下方にずらし当該アクチュエータ748の駆動軸が可動板740に力を付与することができるようにしてもよい。
【0104】
このような構成によれば、連結部770の位置を調整することで、上記変形例に用いられたアクチュエータ748と同じアクチュエータ748を用いて、可動板740の変位量の最大値を調整することができる。つまり、可動板740の変位によりユーザに提示可能な力のモーメントの最大値を調整することができる。
【0105】
なお、本変形例では、本体710と、第3の可動板740とを連結する連結部770について説明したが、本体710と、第1の可動板720、第2の可動板730、第4の可動板750とを連結する連結部についても同様に移動可能に構成することができる。
【0106】
以上、本技術の実施形態について説明したが、本技術は上述の実施形態及び上記変形例にのみ限定されるものではなく、本技術の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0107】
上記各実施形態及び上記各変形例では、各可動板を所定の長さY軸方向あるいはX軸方向へ移動させることで本体に対して所定のモーメントを発生させる例を示したが、これに限定されない。例えば、所定の周波数、振幅で各可動板を振動させることで、本体に対して所定のモーメントを発生させるようにしてもよい。これにより、ゲームの場面によっては、よりリアリティーのある力覚をユーザに提示することができる。例えばバットにボールが当たった瞬間や釣竿に魚がヒットした瞬間等には効果的である。
【0108】
上記各実施形態及び上記各変形例では、制御装置2側で当たり判定を行い、力覚提示装置1側ではこの判定結果に基づいて処理を分岐する例を示したが、これに限定されない。例えば力覚提示装置1が、ユーザの操作対象の位置情報と、当たり判定対象の位置情報を制御装置2から取得し、位置・傾き計測部104により検出した本体110の動きの情報を基に最新の操作対象の位置を演算し、このユーザの操作対象の位置情報と当たり判定対象の位置情報と比較することで、力覚提示装置1側で当たり判定を行うようにしてもよい。
【0109】
上記各実施形態及び上記各変形例では、力覚提示装置1でユーザの操作対象の位置を演算する例を示した。しかし、これに限定されず、例えば力覚提示装置で位置・傾き計測部104により検出した力覚提示装置の動きの情報を用いてユーザの操作対象の位置を演算せずに、位置・傾き計測部104により検出した力覚提示装置の動きの情報を制御装置2側に送信して、制御装置2側で力覚提示装置の動きの情報を用いてユーザの操作対象の位置を演算するようにしてもよい。このようにすることで、力覚提示装置の制御部の負荷を低減することができる。
【0110】
上記第1〜第6の実施の形態では、第1の可動板120等が板状部材である例を示した。しかし、第1の可動部120等の形状はこれに限定されない。例えばユーザがこれらの可動部を把持し易すくするために、これらの可動部の形状をユーザの手にフィットするような形状にしてもよい。
【0111】
なお、本技術は以下のような構成も採ることができる。
(1)第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む本体と、
前記把持部の少なくとも一部を被覆し、前記本体に対して前記第1の軸と交差する第2の軸方向へ変位可能な第1の可動部と、
前記本体に設けられ、前記本体に対して前記第1の可動部を前記第2の軸方向へ変位させることで前記第1の軸及び前記第2の軸に各々に交差する第3の軸回りのモーメントを前記把持部に発生させる第1の駆動機構と
を具備する力覚提示装置。
(2)上記(1)に記載の力覚提示装置であって、
前記第1の駆動機構は、前記第1の軸方向に離間して配置された複数の駆動源を有する
力覚提示装置。
(3)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に長手方向を有する板状部材であり、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記板状部材を傾動させることが可能な傾動機構部をさらに有する
力覚提示装置。
(4)上記(3)に記載の力覚提示装置であって、
前記板状部材は、前記第1の軸方向に相互に離間する第1の端部と第2の端部とを有し、
前記傾動機構部は、
前記第1の端部を移動させることが可能な第1の駆動源と、
前記第2の端部を前記第1の端部の移動方向とは反対方向へ移動させることが可能な第2の駆動源と、
前記第1の駆動源と前記第2の駆動源との間に配置され、前記板状部材を前記第3の軸に平行な軸回りに回動可能に支持する連結部とを有する
力覚提示装置。
(5)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、
前記第1の軸方向に長手方向を有する第1の板状部材と、
前記本体を挟んで前記第1の板状部材と前記第2の軸方向に対向する第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記第1の板状部材及び前記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む
力覚提示装置。
(6)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第1の板状部材と前記第2の板状部材とを前記第2の軸方向に沿って相互に逆方向に移動させる直動機構部を含む
力覚提示装置。
(7)上記(6)に記載の力覚提示装置であって、
前記第1の可動部は、
前記本体を挟んで前記第1の板状部材と対向する第3の板状部材と、
前記本体を挟んで前記第2の板状部材と対向する第4の板状部材とをさらに有し、
前記第1の駆動機構は、前記第3の板状部材を前記第1の板状部材と同一方向へ移動させ、前記第4の板状部材を前記第2の板状部材と同一方向へ移動させる
力覚提示装置。
(8)上記(2)〜(7)のいずれか一つに記載の力覚提示装置であって、
前記複数の駆動源は、直動シリンダで構成される
力覚提示装置。
(9)上記(2)〜(7)のいずれか一つに記載の力覚提示装置であって、
前記複数の駆動源は、振動モータで構成される
力覚提示装置。
(10)上記(1)〜(9)のいずれか一つに記載の力覚提示装置であって、
前記把持部の他の一部を被覆し、前記本体に対して前記第3の軸方向へ変位可能な第2の可動部と、
前記本体に設けられ、前記本体に対して前記第2の可動部を前記第3の軸方向へ変位させることで前記第2の軸回りのモーメントを前記把持部に発生させる第2の駆動機構とを更に具備する
力覚提示装置。
【符号の説明】
【0112】
1,200,300,400,500,600,700…力覚提示装置
2…制御装置
3…表示装置
105…制御部
107…アクチュエータ駆動部
108,308,408,708,728,748,768…アクチュエータ
110,310,410,510,610,710…本体
110G,210G,410G,610G…把持部
120,220A,220B,230,320,420A,420B,430,520,530,620,630,640,650,720,730,740,750…可動板
【技術分野】
【0001】
本技術は、ユーザに力覚を提示する力覚提示装置に関する。
【背景技術】
【0002】
従来、ユーザに対して力覚を提示することが可能な種々の装置が知られている。例えば軸の周りに傾動、回動可能な操作レバー、この操作レバーを傾動、回動させるためのモータ、障害物との距離等を検出するセンサ、モータを制御する制御部等を備えたジョイスティックが知られている。この技術では、ジョイスティックは、車椅子やクレーンに取り付けられて用いられ、ジョイスティックが障害物に近づいたことをセンサが検出したとき等に、制御部がモータの回転を制御することで、ユーザの操作する力に対する反力をユーザに付与することが可能に構成されている(特許文献1 段落0008,0009,0022参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−59934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した技術では、ジョイスティックは、例えば車椅子やクレーンに取り付けられて用いられる接地型の装置であり、非接地型の装置ではない。非接地型の電子機器として、例えばゲーム等で用いられる空間操作型のコントローラが知られている。このようなコントローラでは、ゲームのリアリティー向上のためにゲーム中に直感的な力覚をユーザに提示することが望まれている。
【0005】
以上のような事情に鑑み、本技術の目的は、ユーザに直感的な力覚を提示可能な力覚提示装置を提供することにある。
【課題を解決するための手段】
【0006】
本技術の一形態に係る力覚提示装置は、本体と、第1の可動部と、第1の駆動機構とを具備する。
上記本体は、第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む。
上記第1の可動部は、上記把持部の少なくとも一部を被覆し、上記本体に対して上記第1の軸と交差する第2の軸方向へ変位可能である。
上記第1の駆動機構は、上記本体に設けられ、上記本体に対して上記第1の可動部を上記第2の軸方向へ変位させることで上記第1の軸及び上記第2の軸に各々に交差する第3の軸回りのモーメントを上記把持部に発生させる。
【0007】
上記力覚提示装置は、第1の駆動機構により、本体に対して第1の可動部を第2の軸方向へ変位させることで第3の軸回りのモーメントを把持部に発生させることができるので、把持部を把持するユーザに直感的な力覚を提示することができる。
【0008】
上記第1の駆動機構は、上記第1の軸方向に離間して配置された複数の駆動源を有するようにしてもよい。これにより、第1の軸方向に離間した位置で第1の可動部に力を付与し第1の可動部を第2の軸方向へ変位させることができる。
【0009】
上記第1の可動部は、上記第1の軸方向に長手方向を有する板状部材であり、上記第1の駆動機構は、上記複数の駆動源の駆動により上記第3の軸回りに上記板状部材を傾動させることが可能な傾動機構部をさらに有するようにしてもよい。これにより、傾動機構部により第3の軸回りに板状部材を傾動させ、第3の軸回りのモーメントを把持部に発生させることができる。
【0010】
上記板状部材は、上記第1の軸方向に相互に離間する第1の端部と第2の端部とを有してもよい。この場合、上記傾動機構部は、第1の駆動源と、第2の駆動源と、連結部とを有する。上記第1の駆動源は、上記第1の端部を移動させることが可能である。上記第2の駆動源は、上記第2の端部を上記第1の端部の移動方向とは反対方向へ移動させることが可能である。上記連結部は、上記第1の駆動源と上記第2の駆動源との間に配置され、上記板状部材を上記第3の軸に平行な軸回りに回動可能に支持する。
【0011】
一方、上記第1の可動部は、上記第1の軸方向に長手方向を有する第1の板状部材と、上記本体を挟んで上記第1の板状部材と上記第2の軸方向に対向する第2の板状部材とを有してもよい。この場合、上記第1の駆動機構は、上記複数の駆動源の駆動により上記第3の軸回りに上記第1の板状部材及び上記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む。
【0012】
これにより、第3の軸回りに第1の板状部材及び第2の板状部材をそれぞれ傾動させ、第3の軸回りのモーメントを把持部に発生させることができるので、ユーザにより直感的な力覚を提示することができる。
【0013】
上記第1の可動部は、上記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、上記第1の駆動機構は、直動機構部を含んでもよい。上記直動機構部は、上記複数の駆動源の駆動により上記第1の板状部材と上記第2の板状部材とを上記第2の軸方向に沿って相互に逆方向に移動させる。
【0014】
これにより、第1の板状部材と、第2の板状部材とを第2の軸方向に沿って相互に逆方向に移動させることができ、把持部に第3の軸周りのモーメントを発生させることができる。
【0015】
上記第1の可動部は、上記本体を挟んで上記第1の板状部材と対向する第3の板状部材と、上記本体を挟んで上記第2の板状部材と対向する第4の板状部材とをさらに有してもよい。この場合、上記第1の駆動機構は、上記第3の板状部材を上記第1の板状部材と同一方向へ移動させ、上記第4の板状部材を上記第2の板状部材と同一方向へ移動させる。
【0016】
これにより、第1〜第4の板状部材を用いて第3の軸周りのモーメントの大きさをより大きくすることができ、より直感的な力覚をユーザに提示することができる。
【0017】
上記複数の駆動源は、直動式アクチュエータで構成されるようにしてもよい。これにより、直動シリンダにより第1の可動部に力を付与し、第1の可動部を変位させることができる。
【0018】
上記複数の駆動源は、振動モータで構成されるようにしてもよい。これにより、振動モータにより第1の可動部を振動させることで、ユーザに直感的な力覚を提示することができる。
【0019】
上記力覚提示装置は、第2の可動部と、第2の駆動機構とをさらに具備してもよい。上記第2の可動部は、上記把持部の他の一部を被覆し、上記本体に対して上記第3の軸方向へ変位可能である。
上記第2の駆動機構は、上記本体に設けられ、上記本体に対して上記第2の可動部を上記第3の軸方向へ変位させることで上記第2の軸回りのモーメントを上記把持部に発生させる。
【0020】
これにより、複数の軸周りのモーメントを把持部に発生させることができるので、ユーザにより多様な力覚を提示することができる。
【発明の効果】
【0021】
以上のように本技術によれば、ユーザに直感的な力覚を提示することができる。
【図面の簡単な説明】
【0022】
【図1】本技術の第1の実施形態に係る力覚提示装置を用いたシステム構成を示す図である。
【図2】図1に示す力覚提示装置がユーザに把持された状態を示す斜視図である。
【図3】図2に示す力覚提示装置の斜視図である。
【図4】図3に示す力覚提示装置の側面図である。
【図5】図4に示す力覚提示装置の可動部の一状態を示す側面図である。
【図6】図4に示す力覚提示装置の可動部の他の状態を示す側面図である。
【図7】図4に示す力覚提示装置の一動作例を説明するフローチャートである。
【図8】本技術の第2の実施形態に係る力覚提示装置の斜視図である。
【図9】図8に示す力覚提示装置の側面図である。
【図10】図9に示す力覚提示装置の一状態を示す側面図である。
【図11】図9に示す力覚提示装置の他の状態を示す側面図である。
【図12】本技術の第3の実施形態に係る力覚提示装置を示す斜視図である。
【図13】図12に示す力覚提示装置の側面図である。
【図14】図13に示す力覚提示装置の一状態を示す側面図である。
【図15】図13に示す力覚提示装置の他の状態を示す側面図である。
【図16】本技術の第4の実施形態に係る力覚提示装置を示す斜視図である。
【図17】図16に示す力覚提示装置の側面図である。
【図18】図17に示す力覚提示装置の一状態を示す側面図である。
【図19】図17に示す力覚提示装置の他の状態を示す側面図である。
【図20】本技術の第5の実施形態に係る力覚提示装置を示す斜視図である。
【図21】本技術の第6の実施形態に係る力覚提示装置を示す斜視図である。
【図22】本技術の第7の実施形態に係る力覚提示装置の把持された状態を示す斜視図である。
【図23】図22に示す力覚提示装置の斜視図である。
【図24】図23に示す力覚提示装置の本体を示す斜視図である。
【図25】図23に示す力覚提示装置の複数の可動部を示す斜視図である。
【図26】図23に示す力覚提示装置の可動部の可動状態を示す側面図である。
【図27】第1の変形例の力覚提示装置を説明するための図である。
【図28】第2の変形例の力覚提示装置を説明するための図である。
【図29】図28に示す力覚提示装置を説明するための図である。
【発明を実施するための形態】
【0023】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
<第1の実施形態>
図1は、本技術の第1の実施形態に係る力覚提示装置を用いたシステム構成を示す図、図2は、図1に示す力覚提示装置がユーザに把持された状態を示す斜視図である。図3は、図2に示す力覚提示装置1の斜視図、図4は、図3に示す力覚提示装置1の概略側面図であり、説明を分かり易くするため要部の構成は誇張して示されている。なお図3,4においてX,Y,Z軸は、互いに直交する3軸方向をそれぞれ示している。
【0024】
本実施形態の力覚提示装置1は、例えば制御装置2と、あるいは制御装置2及び表示装置3と組み合わされることで、力覚提示システムを構成することが可能である。
【0025】
(力覚提示装置)
力覚提示装置1は、ユーザが把持できる大きさであり(図2参照)、例えばZ軸方向に長手方向を有する略直方体形状である。本実施形態において、力覚提示装置1は、主として、ゲームに用いられる空間操作型のコントローラとして構成されている。力覚提示装置1は、空間内でユーザが力覚提示装置1を動かしたとき、この移動に関する情報を含む操作信号を生成し、制御装置2へ送信するように構成されている。力覚提示装置1は、後述するように制御装置2から信号を受信し、この信号に応じてユーザに力覚を提示可能に構成されている。
【0026】
力覚提示装置1は、ユーザに把持される把持部110Gを有する本体110と、後述する可動板120(第1の可動部)とを備えている。本体110は、Z軸方向に長手方向を有する略四角柱状に形成されている。本体110の内部には、無線通信部102と、電源部103と、位置・傾き計測部104と、制御部105と、アクチュエータアンプ106と、アクチュエータ駆動部107と、複数の駆動源としての複数のアクチュエータ108A,108B(以下、個別に説明する場合を除き、アクチュエータ108と総称する。)とが収容されている。
【0027】
本体110は、Z軸方向に長手方向を有する略直方体で形成されている。制御部105、アクチュエータ駆動部107、複数のアクチュエータ108等は、本体110に対して可動板120をY軸方向へ変位させることで把持部110GにX軸回りのモーメントを発生させる「第1の駆動機構」を構成する。
【0028】
無線通信部102は、制御装置2の無線通信部との間で双方向の通信を可能とする無線通信モジュールで構成されるが、有線通信でもよい。通信方式は特に制限されず、「ZigBee」(登録商標)、「Bluetooth」(登録商標)などの機器間通信でもよいし、インターネットを経由した通信でもよい。
【0029】
電源部103は、力覚提示装置1の電源を構成し、本体110内部の各部へ必要な電力を供給する。電源部103は、典型的にはバッテリで構成される。バッテリは一次電池でもよいし、二次電池でもよい。また電源部103は、太陽電池で構成されてもよい。なお、有線やワイヤレス給電の場合、電源部103は不要である。
【0030】
位置・傾き計測部104は、空間内で操作される力覚提示装置1の位置、傾き等を計測するためのセンサを含む。センサとして、典型的には、加速度センサ、角速度センサが挙げられる。位置・傾き計測部104は、X、Y及びZの各軸方向の本体110の動きを検出可能に構成されるが、その構成は特に限定されない。例えば、各方向に沿って加速度センサが配置されてもよいし、単数又は複数の角速度センサを組み合わせて構成されてもよい。その他、地磁気センサや圧力センサ等が併用されてもよい。
【0031】
無線通信部102、電源部103、位置・傾き計測部104等は、本体110の内部ではなく、力覚提示装置1の外部装置として構成されてもよい。
【0032】
制御部105は、ROM、RAM、CPU(MPU)を含むコンピュータで構成され、無線通信部102を介して例えばゲームの各種情報を取得可能に構成されている。このゲームの各種情報には、例えばユーザの操作対象(例えば野球ゲームにおけるバット、釣りゲームにおける釣竿、料理ゲームにおけるフライパン等)と、この操作対象に力を付与する物体(例えば上記各種ゲームにおけるボール、魚、具材等)との間の当たり判定の結果情報が含まれる。ここで上記当たり判定とは、画面において上記操作対象と上記物体とが接触等の所定の関係にあるかどうかの判定をいう。
【0033】
制御部105は、位置・傾き計測部104の出力信号を取得しこの出力信号に基づいて操作信号を生成し、無線通信部102に出力可能に構成されている。この位置・傾き計測部104の出力信号には、位置・傾き計測部104で計測された本体110の加速度、角速度、これらの値を用いて演算されたユーザの操作対象の位置等の本体110の動きに関する情報が含まれる。この操作信号は、無線通信部102により制御装置2へ送信される。
【0034】
制御部105は、無線通信部102を介して取得したゲームの各種情報(上記の当たり判定の結果情報を含む。)に基づき、アクチュエータアンプ106に所定の駆動信号を出力するように構成されている。
【0035】
アクチュエータアンプ106は、制御部105から受信した駆動信号を増幅してアクチュエータ駆動部107に出力するように構成されている。
【0036】
アクチュエータ駆動部107は、アクチュエータアンプ106からの駆動信号に基づいて複数のアクチュエータ108に駆動信号を出力する。
【0037】
複数のアクチュエータ108は、アクチュエータ駆動部107からの駆動信号に基づいて駆動し、本体110に対して可動板120を変位させることができるように構成されている。
【0038】
可動板120は、把持部110Gの一部を被覆し、本体110の側面111側に設けられている。可動板120は、本体110に対してY軸方向に変位可能に構成されている。
【0039】
本実施形態において可動板120は、本体110の長手方向と同じZ軸方向に長手方向を有する板状部材であり、連結部125を介して本体110に対して傾動可能に支持されている。連結部125と、複数のアクチュエータ108は、可動板120をX軸回りに傾動させるための「傾動機構部」を構成する。
【0040】
連結部125は、可動板120をX軸に平行な軸Rの周りに回動可能に支持している。連結部125は、本体110に設けられた連結突部115と、可動板120に設けられた連結突部121とを有する。連結突部115は、本体110の側面111側に側面111から突出するように設けられ、連結突部115は、本体110の長手方向の中央に設けられている。連結突部121は、可動板120の長手方向の中央に設けられている。連結突部121は、可動板120の長手方向の両端部である第1の端部120Aと第2の端部120Bとが側面111に近づいたり離れたりすることが可能となるように連結突部115に連結されている。
【0041】
複数のアクチュエータ108は、本体110の側面111側に埋設されるように設けられている。複数のアクチュエータ108は、Z軸方向に相互に離間して本体110の両端部に配設された2つのアクチュエータ108A(第1の駆動源),108B(第2の駆動源)で構成される。一方のアクチュエータ108Aは、可動板120の第1の端部120Aを移動させ、他方のアクチュエータ108Bは、可動板120の第2の端部120Bを移動させる。
【0042】
各アクチュエータ108A,108Bは、駆動軸118A,118Bを有する。各駆動軸118A,118Bは、本体110の側面111に直交するY軸方向に移動可能に設けられている。各駆動軸118は、図3、図4に示す初期位置に位置するときに、例えば各駆動軸118の先端が可動板120に当接するように調整されている。各駆動軸118が初期位置に位置しているときに、可動板120は筐体101の側面111に対して平行に配置されている。
【0043】
アクチュエータ108A,108Bには、例えば、直動モータや直動シリンダ等の直動式アクチュエータが用いられる。各駆動軸118A,118Bの移動量は、例えばアクチュエータ108A,108Bに通電される電流によって制御される。各駆動軸118A,118Bの移動の方向は、例えばアクチュエータ108に通電される電流の向きによって制御される。なお後述するように、アクチュエータ108として、ボイスコイルモータ等の振動モータが用いられてもよい。
【0044】
図5は、図4に示す力覚提示装置1の第1の可動部120の一状態を示す側面図、図6は、図4に示す力覚提示装置1の第1の可動部120の他の状態を示す側面図である。
【0045】
制御部105は、複数の駆動軸118A,118Bのうち一方の駆動軸118AをY軸方向プラス向き(図中右方)に移動させるときは、他方の駆動軸118をY軸方向マイナス向き(図中左方)に移動させるようにアクチュエータ108A,108Bを駆動する。これにより、図5に示すように可動板120の第1の端部120Aが本体110の側面111から離れ、可動板120の第2の端部120Bが本体110の側面111に近づくことで、可動板120が図5にように本体110の側面111に対して斜めに傾いた状態となる。
【0046】
同様に、制御部105は、一方の駆動軸118AをY軸方向マイナス向きに移動させるときは、他方の駆動軸118BをY軸方向プラス向きに移動させるようにアクチュエータ108A,108Bを駆動する。これにより、図6に示すように可動板120第1の端部120Aが本体110の側面111に近づき、可動板120の第2の端部120Bが本体110の側面111から離れることで、可動板120が図6に示すように本体110の側面111に対して斜めに傾いた状態となる。
【0047】
(制御装置)
制御装置2は、例えば、ビデオRAMと、表示制御部と、MPUと、RAMと、ROMと、無線通信部とを有する。
制御装置2の無線通信部は、例えばゲームの各種の情報を含む信号を力覚提示装置1に送信可能に構成されていると共に、力覚提示装置1から送信された後述する操作信号を受信可能に構成されている。MPUは、力覚提示装置1からの操作信号を解析し、RAM、及びROMに格納された各種設定値及びプログラムを用いて各種の演算処理を行う。演算処理の一例として、MPUは、この操作信号に基づいて、表示装置3の画面に表示されるユーザの操作対象の位置を算出(更新)する。表示制御部は、MPUの制御に応じて、主に、表示装置3の画面に表示するための画面データを生成する。画面データとしては、ポインタ、アイコン、ゲームにおけるユーザの操作対象等の画面データが含まれる。ビデオRAMは、表示制御部の作業領域となり、生成された画面データを一時的に格納する。
制御装置2は、例えばゲーム機器であるが、力覚提示装置1に専用の機器であってもよいし、PC(パーソナルコンピュータ)等の一般的な情報処理装置であってもよい。また、制御装置2は、表示装置3と一体となったコンピュータであってもよい。制御装置2による制御対象機器は、オーディオ/ビジュアル機器、プロジェクタ、カーナビゲーション機器等であってもよい。
【0048】
(表示装置)
表示装置3は、例えば制御装置2からの出力情報に基づいて画面に例えばユーザの操作対象の画像等を表示する。表示装置3は、例えば液晶ディスプレイ、EL(Electro-Luminescence)ディスプレイ等が挙げられるが、これらに限られない。表示装置3は、テレビジョン放送等を受信できるディスプレイと一体となった装置でもよい。表示装置3は、画面上に3次元映像を表示することが可能な、例えば3Dテレビジョンで構成されてもよい。
【0049】
(動作)
図7は、図4に示す力覚提示装置1の一動作例を説明するフローチャートである。
本動作例は、例えば種々のゲームにおけるユーザの操作対象(例えばバット、釣竿、フライパン等)と、この操作対象に力を付与する物体(例えばボール、魚、具材等、以下、当たり判定対象、という。)との間の当たり判定の結果に応じて、力覚提示装置1が可動板120を変位させることで、ユーザに力覚を提示する動作例について説明する。
【0050】
ユーザは、可動板120の上から本体110の把持部110Gを把持して、表示装置3の画面に表示される映像を見ながら、力覚提示装置1を空中で操作する。制御部105は、位置・傾き計測部104から、本体110の動きに関する情報を取得する(ST701)。この動きに関する情報には、例えばユーザの操作対象の位置、力覚提示装置1の加速度、角速度等の情報が含まれている。
【0051】
制御部105は、ST701で取得した動きに関する情報に基づき、ユーザの操作対象の最新の位置を演算し、この位置等の情報を無線通信部102を介して制御装置2に送信する(ST702)。
【0052】
一方、制御装置2では、ST702で力覚提示装置1から送信された信号を受信し、ユーザの操作対象の位置を更新する。また、制御装置2では、当たり判定対象の位置を演算し更新する。そして、制御装置2は、これら2つの位置情報及び画像データを表示装置3に送信する。これにより、表示装置3の画面の所定の位置に更新されたユーザの操作対象と、更新された当たり判定対象とが表示される。制御装置2では、例えば更新されたユーザの操作対象の位置と、更新された当たり判定対象の位置とが同じであるか否かを判定し(当たり判定)、当たり判定の結果情報を力覚提示装置1に送信する。
【0053】
制御部105は、無線通信部102を介して、制御装置2から当たり判定の結果情報等を含むゲームの各種の情報を取得する(ST703)。
【0054】
制御部105は、ST703で取得した当たり判定の結果情報に基づき、制御装置2での当たり判定結果が肯定判定か否かを判定する(ST704)。ST704で否定判定のときには、処理を終了し、ST704で肯定判定のときには、ST705に進む。
【0055】
ST704で当たりと判定したときには、制御部105は、アクチュエータアンプ106へ所定の駆動信号を出力する(ST705)。具体的には、この所定の駆動信号には、複数の駆動軸118の移動量、移動方向等の情報が含まれている。このとき、制御部105は、両方の駆動軸118の移動速度及び移動量が同じになると共に、移動の向きが反対になるように駆動信号を出力する。
【0056】
アクチュエータアンプ106は、制御部105から受信したこれらの駆動信号を増幅してアクチュエータ駆動部107に出力する(ST706)。
【0057】
アクチュエータ駆動部107は、アクチュエータアンプ106からの駆動信号に基づいて駆動信号を生成して複数のアクチュエータ108に出力する(ST707)。これにより、一方の駆動軸118が所定の長さY軸方向プラス向きに移動すると共に他方の駆動軸118を同じ所定の長さY軸方向マイナス向きに移動したり、一方の駆動軸118が所定の長さY軸方向マイナス向きに移動すると共に他方の駆動軸118を同じ所定の長さY軸方向プラス向きに移動したりする。
【0058】
これにより、図5又は図6に示すように一方又は他方の駆動軸118が可動板120に力を付与することで、可動板120は、軸Rを中心として回動する(ST708)。このようにして、軸Rを中心とした力のモーメントが把持部110Gに発生する。
【0059】
このように本実施形態の力覚提示装置1は、本体110と、本体110に対してY軸方向に変位可能に設けられた第1の可動部120と、第1の可動部120をY軸方向に変位させることで、X軸周りのモーメントを把持部120Aに発生させる複数のアクチュエータ108と、複数のアクチュエータ108の駆動を制御する制御部105とを備える。力覚提示装置1は、例えばゲームにおいて、ユーザの操作対象(例えばバット)と、当たり判定対象(例えばボール)との間の当たり判定の結果に基づき、複数の駆動軸118を駆動し、可動板120の両端部の位置をY軸方向に変位させる。これにより、把持部110GにX軸回りのモーメントを発生させて、力覚提示装置1を把持するユーザに対して直感的な力覚を提示することができる。また、表示映像に準じて力覚提示装置1にモーメントを発生させることができるので、操作性の向上とより臨場感の高いインタラクションを実現することができる。
【0060】
また、複数のアクチュエータ108がZ軸方向に離間して本体110の長手方向の両端部に配設されている。このため、複数の駆動軸118A,118Bにより可動板120の第1の端部120A、第2の端部120Bに直接的に力を付与することができるので、確実に可動板120を軸Rを回動軸としてY軸方向に変位させることができる。
【0061】
ゲームにおける具体例としては、ユーザの操作対象がゲームにおけるバットやラケットであり、バットやラケットに力を付与する物体がボールである場合が挙げられる。この場合には、バットやラケットにボールがヒットしたときに(当たりの判定)、その反力に相当するモーメントが把持部110Gに発生するように可動板120を傾動させる。これにより、ボールを打つ瞬間のリアリティーのある力覚をユーザに提示することができる。
【0062】
また、ゲームにおけるユーザの操作対象が釣竿であり、釣竿に力を付与する物体が魚である場合には、魚がヒットしたときに、第1の端部120Aを下方へ引き込むような回転力(モーメント)を本体110に作用させるべく、可動板120の位置を変位させる。この際、対象とする魚の種類等に応じて大きさの異なるモーメントが発生するようにアクチュエータ108の駆動力を制御することで、ユーザに対しよりリアリティーのある力覚を提示することができる。
【0063】
また、力覚提示装置1を各種のトレーニング用のゲームのために用いるようにしてもよい。
例えば、ドラム等の打楽器を練習するためのゲームに用いることができる。具体的には、表示装置3の表示画面にドラムの画像を表示しておき、スティックの代わりに力覚提示装置1を用いる。この場合、ゲームにおけるユーザの操作対象がスティックであり、スティックに力を付与する物体がドラムである。そして、ドラムにスティックが当たったときに(当たりの判定)、その反力に相当するモーメントが把持部110Gに発生するように可動板120を傾動させることで、実際のドラム演奏の練習と同様のリアリティーのある力覚をユーザに提示することができる。特に、現実のドラム等の楽器の練習においては、楽器の準備が大掛かりになるが、力覚提示装置1を用いることで、ドラムの練習を容易に行うことができる。
【0064】
また、力覚提示装置1は、料理の練習をするためのゲームにも用いることができる。具体的には、表示装置3の表示画面に野菜等の食材と、まな板と、包丁とを表示しておき、ユーザは包丁の代わりに力覚提示装置1を用いる。ゲームにおけるユーザの操作対象が包丁であり、包丁に力を付与する物体が野菜やまな板である。この場合には、包丁に野菜やまな板が当たったときに(当たりの判定)、食材の種類やまな板の質感に応じたモーメントが把持部110Gに発生するように可動板120を傾動させることで、ユーザに食材を切る瞬間のリアリティーのある力覚を提示することができる。特に、現実に料理の練習においては、食材が有限であるが、力覚提示装置1を用いることで、何回でも反復してリアリティーのある練習することができる。
【0065】
<第2の実施形態>
図8は、本技術の第2の実施形態に係る力覚提示装置の斜視図、図9は、図8に示す力覚提示装置の側面図であり、説明を分かり易くするため要部の構成は誇張して示されている。なお、本実施形態では、上記実施形態に比べて、複数のアクチュエータの配設位置及び可動部の構成が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0066】
本実施形態の力覚提示装置200は、第1の実施形態の本体110と同様に構成された本体210を有する。本体210には複数のアクチュエータ108A,108Bと制御部205等が設けられている。制御部205は、制御部105と同様の構成を有し、複数のアクチュエータ108A,108Bの駆動を制御する。アクチュエータ108A,108Bの駆動軸118A,118Bの先端には、それぞれ第1の可動板220A、第2の可動板220Bが接続されている。第1,第2の可動板220A,220Bは、ともに板状形状を有した板状部材(第1の可動部)であり、本体210の把持部210Gの一部を被覆する。第1,第2の可動板220A,220Bは、本体210の長手方向(図9のZ軸方向)に離間して、本体210の側面211に平行になるように配設されている。
【0067】
図10は、図9に示す力覚提示装置200の一状態を示す側面図、図11は、図9に示す力覚提示装置200の他の状態を示す側面図である。
制御部205は、アクチュエータ108A,108Bの駆動軸118A,118Bを相互に逆方へ移動させる(直線機構部)。すなわち制御部205は、図10に示すように駆動軸118AをY軸方向プラス向きに移動させるときには駆動軸118BをY軸方向マイナス向きに移動させ、図11に示すように駆動軸118AをY軸方向マイナス向きに移動させるときには駆動軸118BをY軸方向プラス向きに移動させる。これにより第1,第2の可動板220A,220Bは相互に逆方向へ移動し、X軸回りに時計方向あるいは反時計方向へのモーメントを把持部210Gに発生させる。
【0068】
本実施形態によれば、上述の第1の実施形態と同様の作用効果を得ることができるので、本体210の操作に応じた所定の力覚をユーザに提示することができる。
【0069】
本実施形態の力覚提示装置200において、第1の可動板220Aのみ、あるいは第2の可動板220BのみがY軸方向へ移動するように構成されてもよい。これにより、ユーザに局所的に力を付与することができる。また、このとき、力覚提示装置200の把持部210Gに力のモーメントを発生させることができる。
【0070】
<第3の実施形態>
図12は、本技術の第3の実施形態に係る力覚提示装置を示す斜視図、図13は、図12に示す力覚提示装置の側面図、図14は、図13に示す力覚提示装置の一状態を示す側面図、図15は、図13に示す力覚提示装置の他の状態を示す側面図である。各図において、説明を分かり易くするため要部の構成は誇張して示されている。
【0071】
本実施形態の力覚提示装置300は、本体310を挟んでY軸方向に相互に対向した配置された第1の可動板120と第2の可動板320とを有する。力覚提示装置300は、第2の可動板320に動力を伝達可能な複数のアクチュエータ308と、アクチュエータ108,308の駆動を制御する制御部305とを備えている。制御部305は、制御部105と同様の構成を有し、上記以外の構成は上記第1の実施形態と同様に構成されているので、同一の部材等には同一の符号を付し、説明を省略する。
【0072】
第2の可動板320は、Z軸方向に長手方向を有する板状部材であり、長手方向の両端部の位置が本体310の側面111側とは反対側の側面311に対して変位可能となるように本体310の側面311側に設けられている。第2の可動板320は、本体310に対して軸R’の回りに回動可能に連結部350で連結されている。複数のアクチュエータ308は第2の可動板320の両端部をY軸方向に押動可能に本体310にそれぞれ配置され、それらの駆動は制御部305によって制御される。
【0073】
図14は、図13に示す力覚提示装置300の一状態を示す側面図、図15は、図13に示す力覚提示装置300の他の状態を示す側面図である。
制御部305は、第1の可動板120を駆動する2つのアクチュエータ108の駆動軸118を相互に逆方向へ移動させ、第2の可動板320を駆動する2つのアクチュエータ308の駆動軸318を相互に逆方向へ移動させる。また制御部305は、アクチュエータ108,308の駆動軸118,318を相互に逆方向へ移動させる。
【0074】
すなわち制御部305は、図14に示すように第1の可動板120を軸Rの回りに時計方向へ傾動させるときには、第2の可動板320をも軸R’の回りに時計方向へ傾動させるようにアクチュエータ108,308を駆動する。一方、制御部305は、図15に示すように第1の可動板120を軸Rの回りに反時計方向へ傾動させるときには、第2の可動板320をも軸R’の回りに反時計方向へ傾動させるようにアクチュエータ108,308を駆動する。これによりX軸回りに時計方向あるいは反時計方向へのモーメントを本体310の把持部310Gに発生させることが可能となる。
【0075】
以上のように構成される本実施形態の力覚提示装置300によれば、第1の実施形態と同様の作用効果を得ることができるので、本体310の操作に応じた所定の力覚をユーザに提示することができる。本実施形態によれば、本体310を挟むように2つの可動板120,320がそれぞれ配置されているため、ユーザによって把持される領域をこれら可動板で占める領域が大きくなる。これによりユーザへ的確に所望の力覚を提示することが可能となる。
【0076】
<第4の実施形態>
図16は、本技術の第4の実施形態に係る力覚提示装置を示す斜視図、図17は、図16に示す力覚提示装置の側面図、図18は、図17に示す力覚提示装置の一状態を示す側面図、図19は、図17に示す力覚提示装置の他の状態を示す側面図である。なお、本実施形態では、第2の実施形態と同様に構成されているので、同一の部材等には同一の符号を付し、説明を省略する。また各図において、説明を分かり易くするため要部の構成は誇張して示されている。
【0077】
力覚提示装置400は、本体410を挟んで第1の可動板220AとY軸方向に対向する第3の可動板420Aと、本体410を挟んで第2の可動板220BとY軸方向に対向する第4の可動板420Bとを有する。力覚提示装置400は、第1,第2の可動板220A,220Bに動力を伝達可能な複数のアクチュエータ108のほか、第3,第4の可動板420A,420Bに動力を伝達可能な複数のアクチュエータ408と、アクチュエータ108,408の駆動を制御する制御部405とを備えている。制御部405は、制御部105と同様の構成を有し、上記以外の構成は上記第1の実施形態と同様に構成されている。
【0078】
第3の可動板420Aと第4の可動板420Bは、Z軸方向に相互に離間するように本体410の側面411にそれぞれ配置された板状部材で構成される。本体410には、これら第3,第4の可動板420A,420Bにそれぞれ連結された駆動軸418をそれぞれ有する複数のアクチュエータ408が設けられている。
【0079】
制御部405は、第1,第2の可動板220A,220Bを駆動する2つのアクチュエータ108の駆動軸118を相互に逆方向へ移動させ、第3,第4の可動板420A,420Bを駆動する2つのアクチュエータ408の駆動軸418を相互に逆方向へ移動させる。また制御部405は、第3の可動板420Aを駆動するアクチュエータ408の駆動軸418を第1の可動板220Aを駆動するアクチュエータ108の駆動軸118と同一方向へ移動させ、第4の可動板420Bを駆動するアクチュエータ408の駆動軸418を第2の可動板220Bを駆動するアクチュエータ108の駆動軸118と同一方向へ移動させる。
【0080】
以上のように構成される本実施形態の力覚提示装置400によれば、第2の実施形態と同様の作用効果を得ることができるので、本体410の操作に応じた所定の力覚をユーザに提示することができる。本実施形態によれば、本体410を挟むように4つの可動板220A,220B,420A,420Bがそれぞれ配置されているため、ユーザによって把持される領域をこれら可動板で占める領域が大きくなる。これによりユーザへ的確に所望の力覚を提示することが可能となる。
【0081】
<第5の実施形態>
図20は、本技術の第5の実施形態に係る力覚提示装置を示す斜視図である。
本実施形態の力覚提示装置500は、Z軸方向に長手方向を有する略四角柱状の本体510を有する。本体510の相対向する一方の2つの側面111、側面311と、相対向する他方の2つの側面511,512とを有する。側面111,311には第1の可動板120,320(第1の可動部)がそれぞれ取り付けられ、側面511,512には第2の可動板520,530(第2の可動部)がそれぞれ取り付けられている。各可動板は、本体510の把持部を全周にわたって被覆し、各可動板の略中央部がユーザにより把持される把持部510Gを形成する。
【0082】
可動板120,320,520,530はそれぞれほぼ同一の構成を有しており、Z軸方向に長手方向を有する長方形状に形成されている。各々の可動板120,320,520,530は、第1及び第3の実施形態で説明した可動板と同様に構成されており、長手方向の略中央部において図示しない連結部を介して本体510に対して傾動可能に取り付けられている。この例では、第1の可動板120,320は、本体410に対してX軸のまわりに傾動し、第2の可動板520,530は、本体410に対してY軸のまわりに傾動するように構成される。
【0083】
本体510の内部には、各可動板を上述のように傾動させる図示しない複数のアクチュエータと、これら複数のアクチュエータの駆動を制御する図示しない制御部が設けられている。複数のアクチュエータは、例えば、本体510の4側面の各端部に計8個設けられている。上記制御部は、制御装置2(図1)から送信される制御信号に基づいて複数のアクチュエータのうち任意のアクチュエータを駆動する。例えば、力覚提示装置500に対してX軸回りのモーメントを発生させる場合には、上述の第3の実施形態と同様に第1の可動板120,320を所定の向きへ傾動させるように、対応する複数のアクチュエータを駆動する。一方、力覚提示装置500に対してY軸回りのモーメントを発生させる場合には、第2の可動板520,530を所定の向きへ傾動させるように、対応する複数のアクチュエータを駆動する。
【0084】
以上のように、本実施形態の力覚提示装置500によれば、相互に直交する2軸(X軸、Y軸)のまわりに所定の大きさのモーメントを発生させることができ、より高機能で複合的な操作感をユーザへ提供することが可能となる。
【0085】
また本実施形態によれば、本体510の全周囲が可動板120,320,520,530で被覆されているため、ユーザに把持される力覚提示装置500の姿勢に大きく依存せず、所望の向きのモーメントをユーザへ提示することが可能となる。
【0086】
<第6の実施形態>
図21は、本技術の第6の実施形態に係る力覚提示装置を示す斜視図である。
本実施形態の力覚提示装置600は、Z軸方向に長手方向を有する略四角柱状の本体610を有する。本体610の相対向する一方の2つの側面211、側面411と、相対向する他方の2つの側面611,612とを有する。側面211,411には第1の可動板220,230,420,430(第1の可動部)がそれぞれ取り付けられ、側面611,612には第2の可動板620,630,640,650(第2の可動部)がそれぞれ取り付けられている。各可動板は、本体610の把持部を全周にわたって被覆し、各可動板の略中央部がユーザにより把持される把持部610Gを形成する。
【0087】
可動板220,230,420,430,620,630,640,650はそれぞれほぼ同一の構成を有しており、Z軸方向に長手方向を有する長方形状に形成されている。各々の可動板は、第2及び第4の実施形態で説明した可動板と同様に構成されており、Y軸方向あるいはX軸方向にそれぞれ移動可能に本体610に取り付けられている。この例では、第1の可動板220,230,420,430は、本体610に対してY軸方向に移動可能であり、第2の可動板620,630,640,650は、本体610に対してX軸方向に移動可能に構成される。
【0088】
本体610の内部には、各可動板を上述のように移動させる図示しない複数のアクチュエータと、これら複数のアクチュエータの駆動を制御する図示しない制御部が設けられている。複数のアクチュエータは、例えば、本体610の4側面の所定位置に計8個設けられている。上記制御部は、制御装置2(図1)から送信される制御信号に基づいて複数のアクチュエータのうち任意のアクチュエータを駆動する。例えば、力覚提示装置600に対してX軸回りのモーメントを発生させる場合には、上述の第4の実施形態と同様に第1の可動板220,230,420,430を所定の向きへ移動させるように、対応する複数のアクチュエータを駆動する。一方、力覚提示装置600に対してY軸回りのモーメントを発生させる場合には、第2の可動板620,630,640,650を所定の向きへ移動させるように、対応する複数のアクチュエータを駆動する。
【0089】
以上のように、本実施形態の力覚提示装置600によれば、相互に直交する2軸(X軸、Y軸)のまわりに所定の大きさのモーメントを発生させることができ、より高機能で複合的な操作感をユーザへ提供することが可能となる。
【0090】
また本実施形態によれば、本体610の全周囲が可動板220,230,420,430,620,630,640,650で被覆されているため、ユーザに把持される力覚提示装置600の姿勢に大きく依存せず、所望の向きのモーメントをユーザへ提示することが可能となる。
【0091】
<第7の実施形態>
図22は、本技術の第7の実施形態に係る力覚提示装置の把持された状態を示す斜視図である。図23は、図22に示す力覚提示装置の斜視図である。本実施形態では、上記第5の実施形態に比べて、本体の形状及び複数の可動部の形状が異なるので、同一の部材等には同一の符号を付しその説明を省略し,異なる箇所を中心に説明する。
【0092】
本実施形態の力覚提示装置700は、Z軸方向に長手方向を有していると共に、ユーザが把持可能な略円柱形状を有している。
【0093】
本実施形態の力覚提示装置700は、円柱形状の本体710と、本体710に対して変位可能に設けられた第1の可動板720、第2の可動板730、第3の可動板740及び第4の可動板750とを有する。これらの可動板は、Z軸方向に長手方向を有し、本体710と同心的な円弧状に形成されている。
【0094】
図24は、図23に示す力覚提示装置700の本体710を示す斜視図である。
本体710の側周面711には、本体710を挟んでY軸方向に対向する複数のアクチュエータ708,728と、本体710を挟んでX軸方向に対向する複数のアクチュエータ748,768とをそれぞれ有する。アクチュエータ708は、Z軸方向に離間してそれぞれ一対配置され、第1の可動板720に連結される。同様に、アクチュエータ728,748,768はZ軸方向に離間してそれぞれ一対ずつ配置され、第2の可動板730、第3の可動板740及び第4の可動板750にそれぞれ連結される。各可動板720,730,740,750は、本体710に対して図示しない連結部を介して傾動可能に支持される。
【0095】
図25は、図23に示す力覚提示装置700の第1〜第4の可動板720,730,740,750を示す斜視図、図26(A),(B)は、図23に示す力覚提示装置700の第1の可動板720及び第2の可動板730の可動状態を示す側面図である。なお、図26では、第3の可動部740の図示を省略した。
【0096】
第1の可動板720及び第2の可動板730は、第3の実施形態と同様に、X軸回りに同一方向へ傾動することで、X軸を中心とする所定のモーメントを発生させる。一方、第3の可動板740及び第4の可動板750は、Y軸回りに同一方向へ傾動することで、Y軸を中心とする所定のモーメントを発生させる。これにより第5の実施形態と同様の作用が得られ、X軸及びY軸の2軸回りのモーメントをユーザへ提示することができる。
【0097】
本実施形態の力覚提示装置700は略円柱形状を有しているため、ユーザにとって把持しやすく、例えばバットやラケット、釣竿等を握ったときの感覚を提示することができる。さらに、上記複数のアクチュエータの駆動力を適宜の大きさに調整することで、操作時において把持部に硬質性や柔軟性を付与することも可能となる。
【0098】
<第1の変形例>
図27は、当該実施形態の第1の変形例の力覚提示装置を説明するための図である。なお、図27では、説明を分かり易くするために第1の可動板720、第2の可動板730、第3の可動板740及び第4の可動板750の図示を省略した。
【0099】
本変形例では、上記第7の実施形態に比べて、複数のアクチュエータ708、728、748、768は、本体710の側周面711上において本体710の長手方向及びこの長手方向に直交する方向(図27に示す矢印方向)に、電気的に又は手動で移動可能に設けられている。
【0100】
このような構成によれば、複数のアクチュエータ708、728、748、768の位置を本体710の長手方向の中央位置に近づける方向D1に移動させると、アクチュエータが同一のストロークで駆動される場合、可動板720,730,740,750の変位量を大きくすることができる。つまり、各可動部の傾きをより大きくすることができる。一方、上記アクチュエータの位置を本体710の両端に近づける方向D2に移動させると、各稼動板の変位量を小さくできる。また、上記アクチュエータの位置を側周面711に沿う方向D3又は方向D4へ移動させることで、Z軸回りのモーメントを発生させるようにしてもよい。このように、同一のアクチュエータで、異なる大きさのモーメントを発生させることが可能となり、多様な力覚をユーザに提示することができる。
【0101】
<第2の変形例>
図28は、当該実施形態の第2の変形例の力覚提示装置を説明するための図、図29は、図28に示す力覚提示装置を説明するための図である。なお、図28においては、本体710と、第3の可動部740とを連結する連結部770を除く構成については、上記第1の変形例と同様であるので、図示を省略した。
【0102】
図28、図29では、連結部770を模式的に示したが、連結部770は、上記実施形態と同様に、本体710に設けられた連結突部と、可動板740に設けられた連結突部とがY軸に平行な同一の軸を回動軸として連結されている。本変形例では、連結部770の位置は、本体710の側周面711上において本体710の長手方向及びこの長手方向に直交する方向(図28に示す矢印方向)に、電気的に又は手動で移動可能に構成されている。
【0103】
具体的には、図29に示すように、連結部770の位置が本体710の長手方向(Z軸方向)の中央に位置しているときには、アクチュエータ748の駆動軸のうち一方の駆動軸が所定の長さ伸び、他方の駆動軸が所定の長さ縮む(図27参照)。このとき、連結部770の軸の周りの力のモーメントの大きさは、可動板740の両端部で同じ大きさとなる。これに対して、連結部770の位置が本体710の長手方向(Z軸方向)の中央から一方に(図29では下方に)ずらされているときには、例えば一方のアクチュエータ748の位置を長手方向下方にずらし当該アクチュエータ748の駆動軸が可動板740に力を付与することができるようにしてもよい。
【0104】
このような構成によれば、連結部770の位置を調整することで、上記変形例に用いられたアクチュエータ748と同じアクチュエータ748を用いて、可動板740の変位量の最大値を調整することができる。つまり、可動板740の変位によりユーザに提示可能な力のモーメントの最大値を調整することができる。
【0105】
なお、本変形例では、本体710と、第3の可動板740とを連結する連結部770について説明したが、本体710と、第1の可動板720、第2の可動板730、第4の可動板750とを連結する連結部についても同様に移動可能に構成することができる。
【0106】
以上、本技術の実施形態について説明したが、本技術は上述の実施形態及び上記変形例にのみ限定されるものではなく、本技術の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0107】
上記各実施形態及び上記各変形例では、各可動板を所定の長さY軸方向あるいはX軸方向へ移動させることで本体に対して所定のモーメントを発生させる例を示したが、これに限定されない。例えば、所定の周波数、振幅で各可動板を振動させることで、本体に対して所定のモーメントを発生させるようにしてもよい。これにより、ゲームの場面によっては、よりリアリティーのある力覚をユーザに提示することができる。例えばバットにボールが当たった瞬間や釣竿に魚がヒットした瞬間等には効果的である。
【0108】
上記各実施形態及び上記各変形例では、制御装置2側で当たり判定を行い、力覚提示装置1側ではこの判定結果に基づいて処理を分岐する例を示したが、これに限定されない。例えば力覚提示装置1が、ユーザの操作対象の位置情報と、当たり判定対象の位置情報を制御装置2から取得し、位置・傾き計測部104により検出した本体110の動きの情報を基に最新の操作対象の位置を演算し、このユーザの操作対象の位置情報と当たり判定対象の位置情報と比較することで、力覚提示装置1側で当たり判定を行うようにしてもよい。
【0109】
上記各実施形態及び上記各変形例では、力覚提示装置1でユーザの操作対象の位置を演算する例を示した。しかし、これに限定されず、例えば力覚提示装置で位置・傾き計測部104により検出した力覚提示装置の動きの情報を用いてユーザの操作対象の位置を演算せずに、位置・傾き計測部104により検出した力覚提示装置の動きの情報を制御装置2側に送信して、制御装置2側で力覚提示装置の動きの情報を用いてユーザの操作対象の位置を演算するようにしてもよい。このようにすることで、力覚提示装置の制御部の負荷を低減することができる。
【0110】
上記第1〜第6の実施の形態では、第1の可動板120等が板状部材である例を示した。しかし、第1の可動部120等の形状はこれに限定されない。例えばユーザがこれらの可動部を把持し易すくするために、これらの可動部の形状をユーザの手にフィットするような形状にしてもよい。
【0111】
なお、本技術は以下のような構成も採ることができる。
(1)第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む本体と、
前記把持部の少なくとも一部を被覆し、前記本体に対して前記第1の軸と交差する第2の軸方向へ変位可能な第1の可動部と、
前記本体に設けられ、前記本体に対して前記第1の可動部を前記第2の軸方向へ変位させることで前記第1の軸及び前記第2の軸に各々に交差する第3の軸回りのモーメントを前記把持部に発生させる第1の駆動機構と
を具備する力覚提示装置。
(2)上記(1)に記載の力覚提示装置であって、
前記第1の駆動機構は、前記第1の軸方向に離間して配置された複数の駆動源を有する
力覚提示装置。
(3)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に長手方向を有する板状部材であり、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記板状部材を傾動させることが可能な傾動機構部をさらに有する
力覚提示装置。
(4)上記(3)に記載の力覚提示装置であって、
前記板状部材は、前記第1の軸方向に相互に離間する第1の端部と第2の端部とを有し、
前記傾動機構部は、
前記第1の端部を移動させることが可能な第1の駆動源と、
前記第2の端部を前記第1の端部の移動方向とは反対方向へ移動させることが可能な第2の駆動源と、
前記第1の駆動源と前記第2の駆動源との間に配置され、前記板状部材を前記第3の軸に平行な軸回りに回動可能に支持する連結部とを有する
力覚提示装置。
(5)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、
前記第1の軸方向に長手方向を有する第1の板状部材と、
前記本体を挟んで前記第1の板状部材と前記第2の軸方向に対向する第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記第1の板状部材及び前記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む
力覚提示装置。
(6)上記(2)に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第1の板状部材と前記第2の板状部材とを前記第2の軸方向に沿って相互に逆方向に移動させる直動機構部を含む
力覚提示装置。
(7)上記(6)に記載の力覚提示装置であって、
前記第1の可動部は、
前記本体を挟んで前記第1の板状部材と対向する第3の板状部材と、
前記本体を挟んで前記第2の板状部材と対向する第4の板状部材とをさらに有し、
前記第1の駆動機構は、前記第3の板状部材を前記第1の板状部材と同一方向へ移動させ、前記第4の板状部材を前記第2の板状部材と同一方向へ移動させる
力覚提示装置。
(8)上記(2)〜(7)のいずれか一つに記載の力覚提示装置であって、
前記複数の駆動源は、直動シリンダで構成される
力覚提示装置。
(9)上記(2)〜(7)のいずれか一つに記載の力覚提示装置であって、
前記複数の駆動源は、振動モータで構成される
力覚提示装置。
(10)上記(1)〜(9)のいずれか一つに記載の力覚提示装置であって、
前記把持部の他の一部を被覆し、前記本体に対して前記第3の軸方向へ変位可能な第2の可動部と、
前記本体に設けられ、前記本体に対して前記第2の可動部を前記第3の軸方向へ変位させることで前記第2の軸回りのモーメントを前記把持部に発生させる第2の駆動機構とを更に具備する
力覚提示装置。
【符号の説明】
【0112】
1,200,300,400,500,600,700…力覚提示装置
2…制御装置
3…表示装置
105…制御部
107…アクチュエータ駆動部
108,308,408,708,728,748,768…アクチュエータ
110,310,410,510,610,710…本体
110G,210G,410G,610G…把持部
120,220A,220B,230,320,420A,420B,430,520,530,620,630,640,650,720,730,740,750…可動板
【特許請求の範囲】
【請求項1】
第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む本体と、
前記把持部の少なくとも一部を被覆し、前記本体に対して前記第1の軸と交差する第2の軸方向へ変位可能な第1の可動部と、
前記本体に設けられ、前記本体に対して前記第1の可動部を前記第2の軸方向へ変位させることで前記第1の軸及び前記第2の軸に各々に交差する第3の軸回りのモーメントを前記把持部に発生させる第1の駆動機構と
を具備する力覚提示装置。
【請求項2】
請求項1に記載の力覚提示装置であって、
前記第1の駆動機構は、前記第1の軸方向に離間して配置された複数の駆動源を有する
力覚提示装置。
【請求項3】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に長手方向を有する板状部材であり、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記板状部材を傾動させることが可能な傾動機構部をさらに有する
力覚提示装置。
【請求項4】
請求項3に記載の力覚提示装置であって、
前記板状部材は、前記第1の軸方向に相互に離間する第1の端部と第2の端部とを有し、
前記傾動機構部は、
前記第1の端部を移動させることが可能な第1の駆動源と、
前記第2の端部を前記第1の端部の移動方向とは反対方向へ移動させることが可能な第2の駆動源と、
前記第1の駆動源と前記第2の駆動源との間に配置され、前記板状部材を前記第3の軸に平行な軸回りに回動可能に支持する連結部とを有する
力覚提示装置。
【請求項5】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、
前記第1の軸方向に長手方向を有する第1の板状部材と、
前記本体を挟んで前記第1の板状部材と前記第2の軸方向に対向する第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記第1の板状部材及び前記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む
力覚提示装置。
【請求項6】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第1の板状部材と前記第2の板状部材とを前記第2の軸方向に沿って相互に逆方向に移動させる直動機構部を含む
力覚提示装置。
【請求項7】
請求項6に記載の力覚提示装置であって、
前記第1の可動部は、
前記本体を挟んで前記第1の板状部材と対向する第3の板状部材と、
前記本体を挟んで前記第2の板状部材と対向する第4の板状部材とをさらに有し、
前記第1の駆動機構は、前記第3の板状部材を前記第1の板状部材と同一方向へ移動させ、前記第4の板状部材を前記第2の板状部材と同一方向へ移動させる
力覚提示装置。
【請求項8】
請求項2に記載の力覚提示装置であって、
前記複数の駆動源は、直動式アクチュエータで構成される
力覚提示装置。
【請求項9】
請求項2に記載の力覚提示装置であって、
前記複数の駆動源は、振動モータで構成される
力覚提示装置。
【請求項10】
請求項1に記載の力覚提示装置であって、
前記把持部の他の一部を被覆し、前記本体に対して前記第3の軸方向へ変位可能な第2の可動部と、
前記本体に設けられ、前記本体に対して前記第2の可動部を前記第3の軸方向へ変位させることで前記第2の軸回りのモーメントを前記把持部に発生させる第2の駆動機構とをさらに具備する
力覚提示装置。
【請求項1】
第1の軸方向に長手方向を有し、ユーザによって把持される把持部を含む本体と、
前記把持部の少なくとも一部を被覆し、前記本体に対して前記第1の軸と交差する第2の軸方向へ変位可能な第1の可動部と、
前記本体に設けられ、前記本体に対して前記第1の可動部を前記第2の軸方向へ変位させることで前記第1の軸及び前記第2の軸に各々に交差する第3の軸回りのモーメントを前記把持部に発生させる第1の駆動機構と
を具備する力覚提示装置。
【請求項2】
請求項1に記載の力覚提示装置であって、
前記第1の駆動機構は、前記第1の軸方向に離間して配置された複数の駆動源を有する
力覚提示装置。
【請求項3】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に長手方向を有する板状部材であり、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記板状部材を傾動させることが可能な傾動機構部をさらに有する
力覚提示装置。
【請求項4】
請求項3に記載の力覚提示装置であって、
前記板状部材は、前記第1の軸方向に相互に離間する第1の端部と第2の端部とを有し、
前記傾動機構部は、
前記第1の端部を移動させることが可能な第1の駆動源と、
前記第2の端部を前記第1の端部の移動方向とは反対方向へ移動させることが可能な第2の駆動源と、
前記第1の駆動源と前記第2の駆動源との間に配置され、前記板状部材を前記第3の軸に平行な軸回りに回動可能に支持する連結部とを有する
力覚提示装置。
【請求項5】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、
前記第1の軸方向に長手方向を有する第1の板状部材と、
前記本体を挟んで前記第1の板状部材と前記第2の軸方向に対向する第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第3の軸回りに前記第1の板状部材及び前記第2の板状部材をそれぞれ傾動させることが可能な傾動機構部を含む
力覚提示装置。
【請求項6】
請求項2に記載の力覚提示装置であって、
前記第1の可動部は、前記第1の軸方向に相互に離間する第1の板状部材と第2の板状部材とを有し、
前記第1の駆動機構は、前記複数の駆動源の駆動により前記第1の板状部材と前記第2の板状部材とを前記第2の軸方向に沿って相互に逆方向に移動させる直動機構部を含む
力覚提示装置。
【請求項7】
請求項6に記載の力覚提示装置であって、
前記第1の可動部は、
前記本体を挟んで前記第1の板状部材と対向する第3の板状部材と、
前記本体を挟んで前記第2の板状部材と対向する第4の板状部材とをさらに有し、
前記第1の駆動機構は、前記第3の板状部材を前記第1の板状部材と同一方向へ移動させ、前記第4の板状部材を前記第2の板状部材と同一方向へ移動させる
力覚提示装置。
【請求項8】
請求項2に記載の力覚提示装置であって、
前記複数の駆動源は、直動式アクチュエータで構成される
力覚提示装置。
【請求項9】
請求項2に記載の力覚提示装置であって、
前記複数の駆動源は、振動モータで構成される
力覚提示装置。
【請求項10】
請求項1に記載の力覚提示装置であって、
前記把持部の他の一部を被覆し、前記本体に対して前記第3の軸方向へ変位可能な第2の可動部と、
前記本体に設けられ、前記本体に対して前記第2の可動部を前記第3の軸方向へ変位させることで前記第2の軸回りのモーメントを前記把持部に発生させる第2の駆動機構とをさらに具備する
力覚提示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2013−80327(P2013−80327A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−219224(P2011−219224)
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]