
加圧加熱モジュール
【課題】ウェハの直径が大きくなる傾向にある近年、重ねあわされる互いのウェハ全面において均一に加圧加熱することが困難になってきている。
【解決手段】ウェハを加圧加熱する加圧加熱モジュールは、軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、押圧力を受けた支柱部に押圧されるヒータプレートと、ヒータプレートに押圧及び加熱されるステージ部を備え、支柱部がヒータプレートを押圧する第1の押圧面は、ヒータプレートがステージを押圧する第2の押圧面より小さい。
【解決手段】ウェハを加圧加熱する加圧加熱モジュールは、軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、押圧力を受けた支柱部に押圧されるヒータプレートと、ヒータプレートに押圧及び加熱されるステージ部を備え、支柱部がヒータプレートを押圧する第1の押圧面は、ヒータプレートがステージを押圧する第2の押圧面より小さい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、加圧加熱モジュールに関する。
【背景技術】
【0002】
半導体装置の実効的な実装密度を向上させる技術のひとつとして、複数の半導体チップを積層させた立体構造がある。特に、半導体基板であるウェハの状態で複数枚を積層して、接合した後に個片化する手順により製造される半導体チップが、その生産性の高さから、近年注目を集めている。2枚のウェハを重ね合わせて接合する場合、互いの電極同士を接触させて加熱および加圧する(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−302858号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ウェハの直径が大きくなる傾向にある近年、重ねあわされる互いのウェハ全面において均一に加圧加熱することが困難になってきている。ウェハに加えられる圧力、温度に分布が生じると回路領域ごとに接合条件が異なることになり、一部の領域では過加圧による破損を招き、一部の領域では圧不足、温度不足による接触不良を招く。特に、ウェハ自体にも厚さのばらつきが存在するので、このようなばらつきも吸収した上で、ウェハ全体を均一に加圧加熱できる装置が望まれている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明の第1の態様における加圧加熱モジュールは、軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、押圧力を受けた支柱部に押圧されるヒータプレートと、ヒータプレートに押圧及び加熱されるステージ部を備え、支柱部がヒータプレートを押圧する第1の押圧面は、ヒータプレートがステージを押圧する第2の押圧面より小さい。
【0006】
なお、上記の発明の概要は、本発明の必要な特徴の全てを列挙したものではない。また、これらの特徴群のサブコンビネーションもまた、発明となりうる。
【図面の簡単な説明】
【0007】
【図1】貼り合わせ装置の全体構造を模式的に示す平面図である。
【図2】基板ホルダを上方から見下ろした様子を示す斜視図である。
【図3】基板ホルダを下方から見上げた様子を示す斜視図である。
【図4】加圧装置の全体構造を模式的に示す正面図である。
【図5】下部加圧モジュールの構造を概略的に示す断面図である。
【図6】ヒータプレートの形状および配置を示す下部ヒートモジュールの上面図である。
【図7】ヒータプレート、フレームおよび支柱部の位置関係を示す下部ヒートモジュールの上面図である。
【図8】ロードセルの上面図と正面図である。
【図9】電熱ヒータの配線を説明する断面図である。
【図10】昇降モジュールの構造を概略的に示す断面図である。
【図11】下部サブルームの体積を増加させてメインピストンを上昇させた様子を示す断面図である。
【発明を実施するための形態】
【0008】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0009】
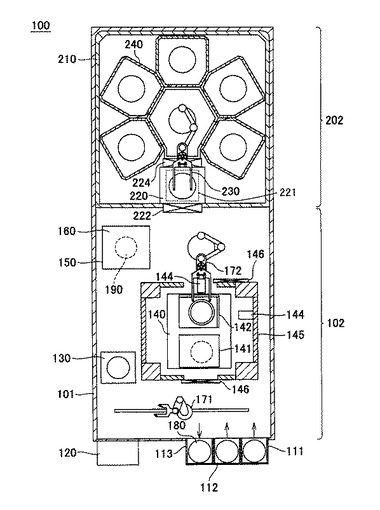
図1は、加圧装置240を含む貼り合わせ装置100の全体構造を模式的に示す平面図である。貼り合わせ装置100は、共通の筐体101の内部に形成された大気環境部102および真空環境部202を含む。
【0010】
大気環境部102は、筐体101の外部に面して、複数の基板カセット111、112、113と、制御盤120とを有する。貼り合わせ装置100に含まれる各装置の各要素は、貼り合わせ装置100全体の制御および演算を司る制御盤120、または要素ごとに設けられた制御演算部が、統合制御、協調制御を行うことにより動作する。また、制御盤120は、貼り合わせ装置100の電源投入、各種設定等をする場合にユーザが外部から操作する操作部を有する。更に、制御盤120は、配備された他の機器と接続する接続部を含む場合もある。
【0011】
基板カセット111、112、113は、貼り合わせ装置100において接合される基板180、あるいは、貼り合わせ装置100において接合された基板180を収容する。また、基板カセット111、112、113は、筐体101に対して脱着自在に装着される。これにより、複数の基板180を一括して貼り合わせ装置100に装填できる。また、貼り合わせ装置100において接合された基板180を一括して回収できる。
【0012】
大気環境部102は、筐体101の内側にそれぞれ配された、プリアライナ130、仮接合装置140、基板ホルダラック150および基板取り外し部160と、一対のロボットアーム171、172とを備える。筐体101の内部は、貼り合わせ装置100が設置された環境の室温と略同じ温度が維持されるように温度管理される。これにより、仮接合装置140の精度が安定するので、位置決めを精確にできる。
【0013】
仮接合装置140は、対向する2枚の基板180に対して精確に位置合わせを行い、互いに重ね合わせる装置であるので、その調整範囲は非常に狭い。そこで、仮接合装置140への搬入に先立ち、仮接合装置140の調整範囲に基板180の位置が収まるように、プリアライナ130で個々の基板180の位置をおよそ把握する。仮接合装置140へは、プリアライナ130でおよそ把握した位置に基づいて向きを調整しつつロボットアーム172へ搬入する。これにより、仮接合装置140における位置決めを確実にすることができる。
【0014】
基板ホルダラック150は、複数の基板ホルダ190を収容して待機させる。なお、基板ホルダ190は、静電吸着により基板180を保持するが、具体的な構成については後述する。
【0015】
仮接合装置140は、固定ステージ141、移動ステージ142および干渉計144を含む。また、仮接合装置140を包囲して断熱壁145およびシャッタ146が設けられる。断熱壁145およびシャッタ146に包囲された空間は空調機等に連通して温度管理され、仮接合装置140における位置合わせ精度を維持する。
【0016】
仮接合装置140において、移動ステージ142は、基板180または基板180を保持した基板ホルダ190を搬送する。これに対して、固定ステージ141は固定された状態で、基板ホルダ190および基板180を保持する。
【0017】
基板取り外し部160は、後述する加圧装置240から搬出された基板ホルダ190から、当該基板ホルダ190に挟まれて接合された基板180を取り出す。基板ホルダ190から取り出された基板180は、ロボットアーム172、171および移動ステージ142により基板カセット113に戻されて収容される。また、基板180を取り出された基板ホルダ190は、基板ホルダラック150に戻されて待機する。
【0018】
なお、貼り合わせ装置100に装填される基板180は、既に回路パターンが複数周期的に形成されている単体のシリコンウエハ、化合物半導体ウエハ等である。また、装填された基板180が、既に複数のウエハを積層して形成された積層基板である場合もある。
【0019】
一対のロボットアーム171、172のうち、基板カセット111、112、113に近い側に配置されたロボットアーム171は、基板カセット111、112、113、プリアライナ130および仮接合装置140の間で基板180を搬送する。また、ロボットアーム171は、接合する基板180の一方を裏返す機能も有する。これにより、基板180において回路、素子、端子等が形成された面を対向させて接合することができる。
【0020】
一方、基板カセット111、112、113から遠い側に配置されたロボットアーム172は、仮接合装置140、基板ホルダラック150、基板取り外し部160、基板ホルダラック150およびエアロックチャンバ220の間で基板180および基板ホルダ190を搬送する。また、ロボットアーム172は、基板ホルダラック150に対する基板ホルダ190の搬入および搬出も担う。
【0021】
真空環境部202は、断熱壁210、エアロックチャンバ220、ロボットアーム230および複数の加圧装置240を有する。断熱壁210は、真空環境部202を包囲して、真空環境部202の高い内部温度を維持すると共に、真空環境部202の外部への熱輻射を遮断する。これにより、真空環境部202の熱が大気環境部102に及ぼす影響を抑制できる。
【0022】
ロボットアーム230は、加圧装置240のいずれかとエアロックチャンバ220との間で基板180および基板ホルダ190を搬送する。エアロックチャンバ220は、大気環境部102側と真空環境部202側とに、交互に開閉するシャッタ222、224を有する。
【0023】
基板180および基板ホルダ190が大気環境部102から真空環境部202に搬入される場合、まず、大気環境部102側のシャッタ222が開かれ、ロボットアーム172が基板180および基板ホルダ190をエアロックチャンバ220に搬入する。次に、大気環境部102側のシャッタ222が閉じられ、真空環境部202側のシャッタ224が開かれる。
【0024】
エアロックチャンバ220にはヒータ221が設けられており、搬入される基板180および基板ホルダ190は、加圧装置240で加圧加熱されるに先立って、ヒータ221で予備加熱される。すなわち、エアロックチャンバ220において雰囲気を交換する時間を利用して、加圧装置240に搬入される前に基板180および基板ホルダ190をある程度温めることで、加圧装置240のスループットを向上させる。なお、エアロックチャンバ220内の加熱は、基板180および基板ホルダ190がエアロックチャンバ220に搬入される前から行うことが好ましい。これにより、基板180および基板ホルダ190をエアロックチャンバ220に滞留させる時間を短縮できる。
【0025】
続いて、ロボットアーム230が、エアロックチャンバ220から基板180および基板ホルダ190を搬出して、加圧装置240のいずれかに装入する。加圧装置240は、基板ホルダ190に挟まれた状態で加圧装置240に搬入された基板180を熱間で加圧する。これにより基板180は恒久的に接合される。具体的な処理及び構成については後述する。
【0026】
加圧装置240は、基板180および基板ホルダ190を加圧する本体と、本体を配置する加圧チャンバとを含む。また、ロボットアーム230は、ロボットアームチャンバに設置される。すなわち、真空環境部202を構成する複数の加圧チャンバ、ロボットアームチャンバ、エアロックチャンバ220は、それぞれ個別に仕切られ、別々に雰囲気を調整することができる。また、図に示すように、真空環境部202は、ロボットアームチャンバを中心として、複数の加圧チャンバとエアロックチャンバ220が円周方向に並べて配置されている。
【0027】
真空環境部202から大気環境部102に基板180および基板ホルダ190を搬出する場合は、上記の一連の動作を逆順で実行する。これらの一連の動作により、真空環境部202の内部雰囲気を大気環境部102側に漏らすことなく、基板180および基板ホルダ190を真空環境部202に搬入または搬出できる。
【0028】
なお、複数の加圧装置240の一つを冷却装置に置き換えることもできる。このとき、冷却装置を設置する冷却チャンバもロボットアームチャンバの周囲に配置される。冷却装置は、加圧装置240で熱せられた基板180および基板ホルダ190が搬入され、これらを一定の温度まで冷やす役割を担う。冷却装置は、熱せられた基板180および基板ホルダ190が搬入されるに先立って、冷却チャンバを予め冷却しておくことが好ましい。
【0029】
ここで、2枚の基板180が重ね合わされて一体化されるまでの流れを簡単に説明する。貼り合わせ装置100が稼動を開始すると、ロボットアーム171により基板180が一枚ずつプリアライナ130に搬入され、プリアラインされる。このとき、まず、接合面が下向きとなる基板180からプリアラインを行う。プリアラインに並行して、ロボットアーム172は、基板180を保持する面を下向きにして収納されている基板ホルダ190を基板ホルダラック150から取り出し、載置面が下向きである固定ステージ141に搬送する。固定ステージ141は、搬送されてきた基板ホルダ190を真空吸着により固定する。なお、固定ステージ141は、移動ステージ142よりも上方に位置する。
【0030】
その後、ロボットアーム171は、プリアラインされた基板180をプリアライナーから取り出し、搬送途中で反転機構を用いて接合面を下向きにして、移動ステージ142から突出された複数のプッシュアップピン上に仮置きする。プッシュアップピン上に仮置きされた基板180は、プッシュアップピンによって固定ステージ141側に持ち上げられて、既に固定ステージ141に固定されている基板ホルダ190の載置面に押し当てられる。基板ホルダ190は、固定ステージ141から電力を供給されて、基板180を静電吸着して固定する。
【0031】
次に接合面が上向きとなる基板180がプリアラインされる。これに並行して、ロボットアーム172は、基板180を保持する面が上向きである基板ホルダ190を基板ホルダラック150から取り出し、載置面が上向きである移動ステージ142に搬送する。移動ステージ142は、搬送されてきた基板ホルダ190を真空吸着により固定する。なお、基板180を保持する面が上向きである基板ホルダ190が移動ステージ142に搬送されるときには、プッシュアップピンは、移動ステージ142のステージ面から退避している。
【0032】
その後、ロボットアーム171は、プリアラインされた基板180をプリアライナーから取り出し、既に移動ステージ142に固定されている基板ホルダ190の載置面に載置する。基板ホルダ190は、移動ステージ142から電力を供給されて、基板180を静電吸着して固定する。このようにして、それぞれのステージに基板ホルダ190と基板180が、互いの接合面が対向するように固定される。
【0033】
互いの接合面が対向するように固定されると、移動ステージ142を、干渉計144によりその位置を監視しつつ精密に移動させて、載置された基板180の接合面を固定ステージ141に保持された基板180の接合面に対して位置合わせする。位置合わせが完了すると、移動ステージ142を固定ステージ141側へ移動させ、接合面同士を接触させて仮接合する。仮接合は、向かい合う2つの基板ホルダ190のそれぞれに設けられた吸着機構を作用させて一体化することにより実現する。
【0034】
仮接合されて一体化された2つの基板180と2つの基板ホルダ190は、ロボットアーム172によりエアロックチャンバ220に搬送される。エアロックチャンバ220に搬送された基板180および基板ホルダ190は、ロボットアーム230により加圧装置240に装入される。
【0035】
加圧装置240において加熱および加圧されることにより、2つの基板180は互いに接合されて恒久的に一体となる。その後、基板180および基板ホルダ190は、真空環境部202から搬出されて、基板取り外し部160に運び込まれ、基板取り外し部160で基板180と基板ホルダ190は互いに分離される。
【0036】
貼り合わされた基板180は、基板カセット113に搬送して収容される。この場合、移動ステージ142は、ロボットアーム172からロボットアーム171への搬送にも携わる。また、基板ホルダ190は、ロボットアーム172により基板ホルダラック150へ戻される。
【0037】
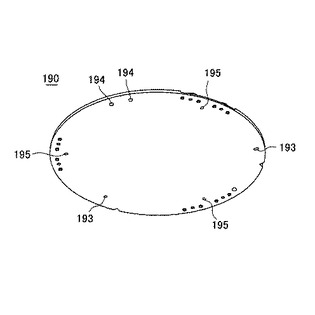
次に、基板ホルダ190について説明する。図2は、基板ホルダ190を上方から見下ろした様子を示す斜視図である。図では、基板ホルダ190の上面に基板180が保持されている。また、図3は、基板ホルダ190を下方から見上げた様子を示す斜視図である。
【0038】
基板ホルダ190は、ホルダ本体191、吸着子192および電圧印加端子194を有して、全体としては基板180よりも径がひとまわり大きな円板状をなす。ホルダ本体191は、セラミックス、金属等の高剛性材料により一体成形される。吸着子192は、強磁性体により形成され、基板180を保持する保持面において、保持した基板180よりも外側である外周領域に複数配される。図の場合、2個を一組として120度毎に合計6個の吸着子192が配されている。電圧印加端子194は、基板180を保持する面の裏面に埋設される。
【0039】
ホルダ本体191は、その保持面において高い平面性を有する。また、ホルダ本体191は、保持した基板180を静電吸着する領域の外側に、ホルダ本体191を表裏に貫通して形成された、それぞれ複数の位置決め穴193を有する。更に、ホルダ本体191は、保持した基板180を静電吸着する領域の内側に、ホルダ本体191を表裏に貫通して形成された、複数の挿通孔195を有する。挿通孔195にはプッシュアップピンが挿通され、基板180を基板ホルダ190から離脱させることができる。
【0040】
位置決め穴193は、固定ステージ141等に設けられている位置決めピンに嵌合して、基板ホルダ190の位置決めに利用される。吸着子192は、保持面と略同じ平面内に上面が位置するように、ホルダ本体191に形成された陥没領域に配設される。電圧印加端子194は、ホルダ本体191の裏面に埋め込まれる。電圧印加端子194を介して電圧を供給することにより、基板ホルダ190と基板180との間に電位差を生じさせて、基板180を基板ホルダ190に静電吸着する。固定ステージ141等にはそれぞれ電圧供給端子が設けられており、基板180と基板ホルダ190の静電吸着を維持できる。
【0041】
移動ステージ142に載置する基板ホルダ190と、固定ステージ141に載置する基板ホルダ190は、若干構成が異なる。具体的には、吸着子192に替えて、吸着子192に対向するように複数のマグネットが配されている。吸着子192とマグネットが結合することにより、2枚の基板180を挟持して2つの基板ホルダ190が一体化される。以下、一体化された2枚の基板180と2つの基板ホルダ190を基板ホルダ対と呼ぶ。
【0042】
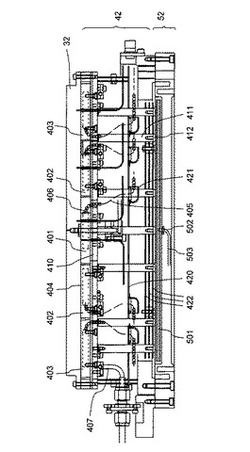
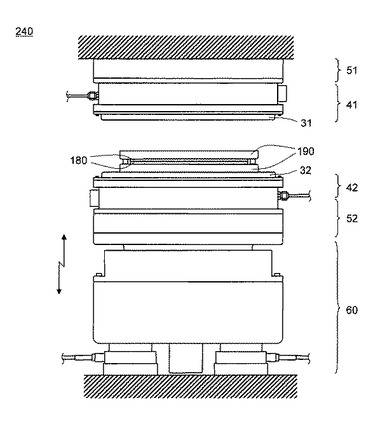
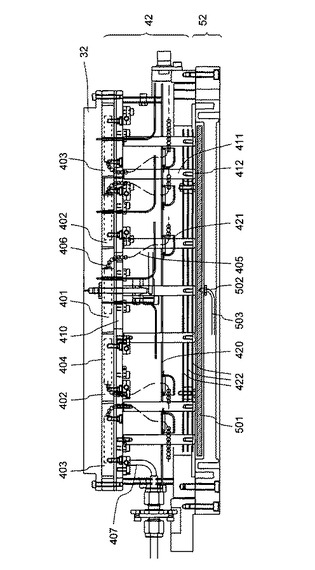
次に加圧装置240の構造について詳細に説明する。図4は、加圧装置240の全体構造を模式的に示す正面図である。加圧装置240は、上述のように真空環境下に調整された加圧チャンバ内に設置されている。加圧装置240は、天井側に設置される上部トッププレート31、上部ヒートモジュール41および上部圧力制御モジュール51と、床面側に設置される下部トッププレート32、下部ヒートモジュール42、下部圧力制御モジュール52および昇降モジュール60によって構成される。上部トッププレート31、上部ヒートモジュール41および上部圧力制御モジュール51は、上部加圧モジュールを形成し、下部トッププレート32、下部ヒートモジュール42および下部圧力制御モジュール52は、下部加圧モジュールを形成する。なお、本実施形態においては、上部ヒートモジュール41および下部ヒートモジュール42により、上部トッププレート31および下部トッププレート32を加熱する機能を有するので、上部加圧モジュールおよび下部加圧モジュールは、それぞれ加熱モジュールとしての役割も同時に担うことができる。
【0043】
下部トッププレート32には、2枚の基板180を挟持して2つの基板ホルダ190が一体化された基板ホルダ対が、ロボットアーム230によって搬入され、載置される。基板ホルダ対は、昇降モジュール60が上昇することにより上部トッププレート31と接触し、上部加圧モジュールと下部加圧モジュールに挟さまれて加圧、加熱される。
【0044】
対向して設置される上部加圧モジュールと下部加圧モジュールは、同一の構造を備えるモジュールである。そこで、下部加圧モジュールを代表としてその構造を以下に説明する。
【0045】
図5は、下部加圧モジュールの構造を概略的に示す断面図である。なお、図は主要な構造物を簡略化して一部を省略しつつ示す。
【0046】
基板ホルダ体を載置するステージ部としての役割を担う下部トッププレート32は、炭化珪素からなる円形状のプレートであり、周縁部において下部ヒートモジュール42にビス止めされる。下部ヒートモジュール42は、円筒形状の内部に、下部トッププレート32の基板ホルダ体を載置する面とは反対側の面において接する複数のヒータプレート401、402、403を備えて構成される。ヒータプレート401、402、403は、加熱部であり、例えば銅を素材として形成され、それぞれの内部に電熱ヒータ404が埋め込まれている。電熱ヒータ404は導線405により電力が供給されるが、その被覆としては高熱に耐えられるように、例えばセラミックにより形成されるビーズ406が用いられる。ビーズ406は、複数個連なって導線405を貫通させ、加熱空間から非加熱空間へ導出する。
【0047】
ヒータプレート401、402、403は、加熱制御時には電熱ヒータ404により加熱されてその熱を下部トッププレート32へ伝達させる。また、加熱終了後の冷却制御時には、クーラとして機能する冷却管407により冷却される。ヒータプレート401、402、403は、下部トッププレート32の中心を通る中心軸から放射状に形成されたフレーム410により支持、固定されている。
【0048】
フレーム410は、複数の支柱部411によりその軸方向の一端に連結されて支持されている。そして、各々の支柱部411の他端は、それぞれロードセル412に連結されている。それぞれのロードセル412は、支柱部411が連結される面とは反対側の面において、下部圧力制御モジュール52の主要な要素である中空加圧部501の外側で接するように設置される。ロードセル412は、圧力検出部であり、中空加圧部501と支柱部411に介在して中空加圧部501が支柱部411を押圧する圧力を検出する。
【0049】
下部ヒートモジュール42の内部空間は、下部トッププレート32の基板ホルダ対の載置面に対して平行に設置される遮熱プレート420により、上下に加熱空間と非加熱空間に分割される。遮熱プレート420は、ヒータプレート401、402、403によって熱せられる加熱空間の熱を、高温を嫌う中空加圧部501、ロードセル412等が設置される非加熱空間へできる限り伝えない機能を担う仕切り板である。遮熱プレート420には、支柱部411を貫通させる貫通孔が設けられている。すなわち、支柱部411は加熱空間と非加熱空間にまたがって存在する。また、遮熱プレート420には、導線405を貫通させる貫通孔も設けられており、その貫通孔の周囲には、導線405を貫通孔から引き出す方向とは異なる方向へ導出させるキャップ421が設置されている。
【0050】
遮熱プレート420と中空加圧部501の間には、遮熱プレート420と平行に、熱反射板422が互いに離間して複数設置される。熱反射板422にも、遮熱プレート420と同様に、支柱部411を貫通させる貫通孔が設けられている。これらの熱反射板422は、例えばアルミニウムなどの金属板により形成される。そして、少なくともその1枚の加熱空間側の表面には、下部トッププレート32の目標加熱温度近傍の輻射線の波長を反射する多層膜が形成される。下部トッププレート32の目標加熱温度は、例えばウェハである基板180を接合する場合には450℃〜500℃である。熱反射板422は、目標加熱温度に応じて取り替えられるように構成しても良い。これにより、ヒータプレート401、402、403から中空加圧部501への熱の伝達を緩和することができる。また、遮熱プレート420と平行に設けるだけでなく、支柱部411の軸方向と平行にも設けても良い。これにより下部ヒートモジュール42から外部への熱漏れも緩和することができる。
【0051】
中空加圧部501は、ゴムシート等から形成される袋状の圧力制御部であり、その内部は、流体により充填されている。流体としては、空気、水、オイルが用いられる。例えば、環境特性に優れたハイドロフルオロエーテルなどが用いられる。そして、内部に充填する流体量を、中空加圧部501と供給管503とに設置されたバルブ502を制御することにより調整する。具体的には、供給管503の他端は、図示しないポンプに接続されており、バルブ502と共にポンプを制御することで、中空加圧部501の内部の流体量を増減させる。中空加圧部501は、内部の流体量により膨張または収縮する。特に、下部圧力制御モジュール52が昇降モジュール60から受ける圧力との関係において、バルブ502を介して内部に流入出させる流体量を調整すると、複数のロードセル412と接する面を、フラットにしたり、周縁部を凸状にしたり、中心部を凸状にコントロールすることができる。
【0052】
中空加圧部501は、ゴムシートのような弾性素材により袋を形成するだけでなく、例えば、複数のロードセル412と接する面側を変形板とし、昇降モジュール60側と外周側を高剛性板として形成する箱状の形態であっても良い。このような形態であっても、内部を気密な袋状に保てば、外部から出入させる流体を制御して内圧を調整することができ、ロードセル412と接する面に対して圧力をコントロールすることができる。
【0053】
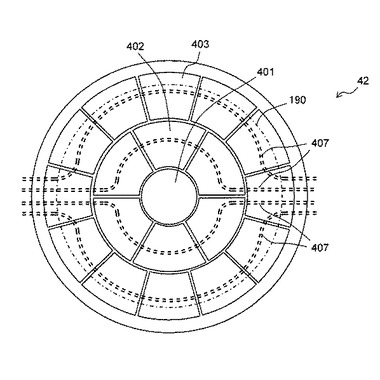
次に、ヒータプレート401、402、403の形状および配置について説明する。図6は、ヒータプレート401、402、403の形状および配置を示す下部ヒートモジュール42の上面図である。
【0054】
図示するように、下部トッププレート32の中心を通る中心軸を中心として、真中に位置する円形のヒータプレート401が1個、その外周部に扇形のヒータプレート402が6個、さらにその外周部に扇形のヒータプレート403が12個配置されている。ヒータプレート402、403の扇形は、中心のヒータプレート401と同心円の弧を有する。
【0055】
ヒータプレート401、402、403によって覆われる平面領域は、下部トッププレート32に載置される基板ホルダ190の載置面に対応する領域よりも広い。これにより、基板ホルダ190の裏面に対して均一に加熱することができる。また、ヒータプレート401、402、403のそれぞれは、互いに平行を保って離間して配置される。これにより、ヒータプレート401、402、403がそれぞれに埋め込まれている電熱ヒータ404により熱せられて膨張しても、互いに接触することを回避できる。互いの間隔は、目標加熱温度等によって予め設定されるが、例えば、ヒータプレート401、402、403が銅により形成され、下部トッププレート32の径が約330mmであって、目標加熱温度が450℃である場合には、1mm程度に設定される。
【0056】
また、それぞれのヒータプレート401、402、403の加熱面は、互いに同じ面積を有する。したがって円形および扇形の形状は、互いに同じ面積となるように径、中心角等が設計される。また、図の例では径方向を3段に設定してそれぞれ個数を定めたが、径方向の段数も、一段あたりの個数も任意に設定することができる。さらにそれぞれのヒータプレート401、402、403の厚さも同一とすれば、それぞれの熱容量も同一となるので、より好ましい。
【0057】
クーラとして機能する冷却管407は、ヒータプレート401、402、403のひとつ以上を冷却するように配管される。例えば、図示するようにヒータプレート402、403のいずれかと接するように冷却管407としてのパイプが張り巡らされ、その中を冷媒が循環するように外部のポンプが制御される。パイプの素材としては、ヒータプレート401、402、403と同じ素材が好ましい。同じ素材でなくても、線膨張率が同じであれば、接触面において温度変化による熱摺動が生じないので、パイプの素材として適用できる。
【0058】
図7は、ヒータプレート401、402、403、フレーム410および支柱部411の位置関係を示す下部ヒートモジュール42の上面図である。フレーム410は、中心部分に設けられた円環部から放射状に複数の腕部を伸ばした形状をなす。そして、円環部でビス408によりヒータプレート401を固定し、腕部で同様にビス408によりヒータプレート402、403を固定している。ビス408は、図示するように、それぞれのヒータプレート401、402、403において中心線上、回転対称または左右対称となる位置に配置することが好ましい。
【0059】
中空加圧部501からの圧力は、複数の支柱部411およびフレーム410を介してヒータプレート401、402、403に伝達される。そして、ヒータプレート401、402、403が下部トッププレート32を押圧すると共に加熱する。中空加圧部501を支柱部411の軸方向に押圧力を発生させるアクチュエータとみなせば、この押圧力は、例えば一つのヒータプレート402を押圧する支柱部411に着目すると、支柱部411→ヒータプレート402→下部トッププレート32の順に伝達される。そして、その押圧面の関係について言えば、支柱部411がヒータプレート402に対して押圧する押圧面は、ヒータプレート402が下部トッププレート32に対して押圧する押圧面よりも小さい。つまり、押圧力は伝達する方向に向かって広がりつつ伝えられる。換言すれば、局在的な圧力が、徐々に分散されて伝えられる。このようにして中空加圧部501で発生させた圧力を下部トッププレート32へ伝えることにより、下部トッププレート32上に均一な押圧力を発生させる、あるいは、基板180の全体を均一に加圧できるように下部トッププレート32上に意図的ななだらかな圧力分布を発生させることができる。なお、本実施形態においては、ヒータプレート401、402、403と支柱部411の間にはフレーム410が介在するが、それぞれの支柱部411近傍に着目すれば、局在的な圧力が徐々に分散されて伝えられることに変わりはない。
【0060】
また、本実施形態においては、内部の流体量を調整することにより膨張または収縮する単一の中空加圧部501を用いて複数の支柱部411を押圧する構成を説明するが、支柱部411のそれぞれを個別に押圧するアクチュエータを用いて構成する場合にも応用できる。すなわち、アクチュエータによって発生される押圧力が局在的であっても、徐々に押圧力を分散させて、広い面で下部トッププレート32を押圧することができる。
【0061】
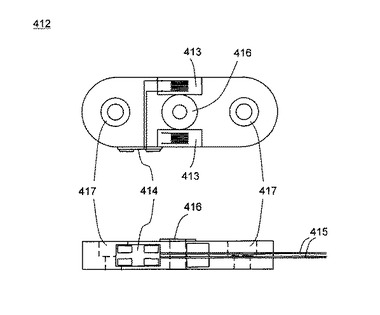
次に、中空加圧部501の外側で接して、支柱部411との間に介在するロードセル412について説明する。図8は、ロードセル412の上面図と正面図である。ロードセル412の上面の2箇所に圧電素子である歪みゲージ413を貼着し、同様に下面にも2箇所に歪みゲージ413を貼着する。4箇所に貼着された歪みゲージの出力線は、側面の端子部414にまとめられて、導線415を介して外部へ接続される。
【0062】
上面の中心付近には、支柱部411を連結するビス穴416が設けられている。また、ビス穴416に対して対称となるように、2つのビス穴417が設けられている。このビス穴417を介して、ロードセル412を中空加圧部501に固定する。
【0063】
このようにして設けられた複数のロードセル412の出力を監視することにより、それぞれの支柱部411に加えられる圧力を検出することができる。そして、検出された圧力に応じて、中空加圧部501の圧力を調整したり、昇降モジュール60の昇降を調整したりすることができる。また、想定される範囲を超える異常圧力を検出した場合には、加圧を停止する制御を行うこともできる。
【0064】
また、圧電素子は、圧力が加えられるとその大きさに応じて電位差を生じるので加えられた圧力を検出することができる一方、逆に電力を加えると物理的な変形を生じさせることができる。そこで、支柱部411の圧力を検出しつつ、特定の領域に圧力分布が生じたときには、その領域またはその領域以外の領域のロードセル412の歪みゲージ413に電力を供給して、支柱部411に加えられる圧力を増加させるように制御できる。このようにロードセル412を補助アクチュエータとして作用させることにより、より精密な圧力制御を実現することができる。特に、下部トッププレート32に載置された基板ホルダ体を均等に押圧する場合に好適である。なお、ロードセル412の配置は上記の位置に限らず、例えば昇降モジュール60の上に複数設けて、下部圧力制御モジュールに加えれらる圧力に対して圧力を調整するように構成しても良い。
【0065】
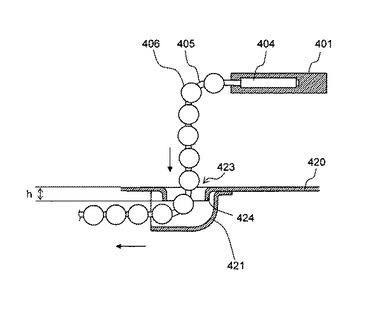
図9は、電熱ヒータ404の配線を説明する断面図である。ここでは、ヒータプレート401を代表例として説明するが、ヒータプレート402、403の構成も同様である。
【0066】
図示するように、ヒータプレート401に埋め込まれた電熱ヒータ404から導線405が引き出されている。それほど高温にならない環境下においては、導線は通常ビニール皮膜により保護されているが、本実施形態においては、ヒータプレート401は450℃〜500℃にまで熱せられるので、ビニール皮膜は用いることができない。また、導線周りの加熱空間および非加熱空間は真空雰囲気であるので、真空雰囲気下においてガスを発生する樹脂などの素材を用いることもできない。そこで、加熱空間の温度よりも高い融点を有し、かつ、真空雰囲気下でもガスを発生しない絶縁素材により形成されたビーズ406を、導線405の保護材として用いる。例えば、素材としてはセラミックが好適である。導線405を保護するビーズ406は、導線405が曲折できるように、導線405を貫通させて、加熱空間から非加熱空間に亘り複数個が連なって構成される。
【0067】
加熱空間と非加熱空間は遮熱プレート420により分割されているが、遮熱プレート420には、導線405を挿通させる貫通孔423が設けられている。そして、貫通孔423の周縁部には、フランジ424が設けられている。フランジ424は、導線405の挿通方向に折り曲げられて形成された立上部である。貫通孔423とフランジ424により貫通部を構成する。
【0068】
ビーズ406は、導線405が曲折されるように、互いに若干の隙間を持って連なっている。つまり、ビーズ406は導線405に沿って移動できるよう、それぞれ可動量を有する。ここで、可動量が、貫通部の高さhよりも大きいと、導線405が直接貫通部に接触してしまう恐れがある。そこで、この可動量は、貫通部の高さhよりも小さくなるように設定されている。
【0069】
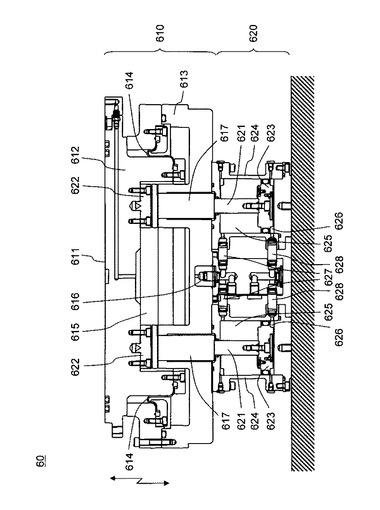
次に昇降モジュール60の構造について説明する。図10は、昇降モジュール60の構造を概略的に示す断面図である。なお、図は主要な構造物を簡略化して一部を省略しつつ示す。
【0070】
昇降モジュール60は、上下に2段の構造をとる。下部圧力制御モジュール52側のメインEV部610と床面側のサブEV部620である。メインEV部610は、ステージ611で下部圧力制御モジュール52に締結される。昇降モジュール60全体としては、このステージ611が床面に対して昇降することにより、下部圧力制御モジュール52を上下させ、ひいては基板ホルダ体に圧力を加えることができる。
【0071】
メインEV部610は、径の大きな1つのシリンダ−ピストン機構から構成され、サブEV部620は、径の小さな3つのシリンダ−ピストン機構が、上方から見たときに円周方向に120°間隔に配置されて構成される。ただし、メインEV部610とサブEV部620は、互いに独立して上下に積み重なったものではなく、相互に作用を及ぼしながらステージ611を昇降させるように工夫されている。以下にそれぞれの構造について説明する。
【0072】
メインEV部610は、ステージ611をその上面とするメインピストン612、メインピストンに外嵌するメインシリンダ613、およびメインシリンダ613に接続されメインピストン612の昇降に追従するベローズ614を備える。メインシリンダ613とメインピストン612の間に形成される空間であるメインルーム615は、メインシリンダ613が昇降しても気密に保たれる。メインルーム615に対しては、メインバルブ616が接続されており、外部から流体が流入出される。メインルーム615は流体で満たされており、この流体の流入出をメインバルブ616を制御することにより、メインルーム615の流体量を変化させることができる。メインルーム615の流体量を変化させることにより、メインピストン612を上下させることができる。
【0073】
サブEV部620は、本実施形態においては上述のように3つ備えるが、それぞれがサブピストン621、およびサブピストン621に外嵌するサブシリンダ624を備える。サブピストン621は、メインシリンダ613の外側からから、メインシリンダ613に設けられたピストンガイド617の内部に挿通され、メインルーム615内に到達している。そして、メインルーム615の内部に位置するサブピストン621の先端に、メインピストン612と固定する固定部622が設けられている。固定部622により、サブピストン621は、メインピストン612に締結されている。
【0074】
サブピストン621は、固定部622が設けられる端とは反対の端に、サブシリンダ624と外嵌するピストンディスク623を備える。そして、サブシリンダ624内の空間は、ピストンディスク623により、メインシリンダ613側に位置する上部サブルーム625と、床面側に位置する下部サブルーム626とに分割される。
【0075】
上部サブルーム625も下部サブルーム626も共に気密に保たれている。そして、上部サブルーム625に対しては、上部サブバルブ627が接続されており、外部から流体が流入出される。また、下部サブルームに626に対しては、下部サブバルブ628が接続されており、外部から流体が流入出される。上部サブルーム625と下部サブルーム626は流体で満たされている。また、上部サブルーム625と下部サブルーム626の体積の総和は常に一定であるので、上部サブバルブ627と下部サブバルブ628を協調制御して、上部サブルーム625と下部サブルーム626の体積比を変化させる。
【0076】
上部サブルーム625の体積を増やせば、下部サブルーム626の体積が減少し、サブピストン621は下降する。そして、サブピストン621はメインピストン612に接続されているので、メインピストン612も下降する。このとき、メインバルブ616も協調制御され、メインピストン612の下降に伴うメインルーム615の体積減少分だけ流体が外部に放出される。
【0077】
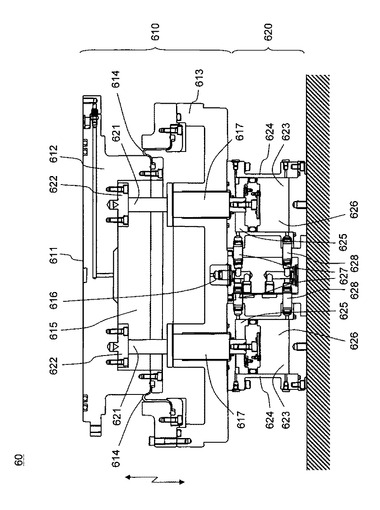
逆に、下部サブルーム626の体積を増やせば、上部サブルーム625の体積が減少し、サブピストン621は上昇する。そして、メインピストン612も上昇する。このとき、メインバルブ616も協調制御され、メインピストン612の上昇に伴うメインルーム615の体積増加分だけ流体をメインルーム615内へ流入させる。図11は、下部サブルーム626の体積を増加させてメインピストン612を上昇させた様子を示す断面図である。
【0078】
なお、メインバルブ616を用いてメインルーム615内の流体量を調整してメインピストン612を昇降させるときにも、サブピストン621が追従する。したがって、このときにも、上部サブバルブ627と下部サブバルブ628を協調制御し、サブピストン621の追従に伴う上部サブルーム625と下部サブルーム626の体積変化を許容する。
【0079】
また、メインルーム615、上部サブルーム625および下部サブルーム626に充填される流体は、空気、水、オイルが用いられる。例えば、環境特性に優れたハイドロフルオロエーテルなどが用いられる。
【0080】
このように昇降モジュール60を、メインEV部610とサブEV部620の2段で構成することにより、ステージ611をどのように昇降させたいかにより制御を異ならせることができる。具体的には、所定の速度以上の速さで移動させたいときには、小体積の流入出により大きな変位が得られるサブEV部620の流体を制御し、所定の圧力以上の圧力を加えたいときには、大体積の流入出によっても僅かな変位に留まるメインEV部610の流体を制御する。また、所定の速度未満の速さで移動させたいときにも、メインEV部610の流体を制御すれば良い。
【0081】
以上の加圧装置240の実施形態によれば、詳細に説明した加圧モジュールと同一構造を備える上部加圧モジュールを互いに対向させて配置し、昇降モジュール60により、下部加圧モジュール上に載置された基板ホルダ体を上部加圧モジュールに接触させて、加圧加熱する。しかし、実施形態はこれに限らず、例えば天井側に上部加圧モジュールを設置する代わりに平面定盤を設置して、単に下方から上方へ押し付ける構造であっても、ある程度の圧力均一性を期待することができる。
【0082】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0083】
31 上部トッププレート、32 下部トッププレート、41 上部ヒートモジュール、42 下部ヒートモジュール、51 上部圧力制御モジュール、52 下部圧力制御モジュール、60 昇降モジュール、100 貼り合わせ装置、101 筐体、102 大気環境部、111、112、113 基板カセット、120 制御盤、130 プリアライナ、140 仮接合装置、141 固定ステージ、142 移動ステージ、144 干渉計、145 断熱壁、146、222、224 シャッタ、150 基板ホルダラック、160 基板取り外し部、171、172、230 ロボットアーム、180 基板、190 基板ホルダ、191 ホルダ本体、192 吸着子、193 位置決め穴、194 電圧印加端子、195 挿通孔、202 真空環境部、210 断熱壁、220 エアロックチャンバ、221 ヒータ、240 加圧装置、401、402、403 ヒータプレート、404 電熱ヒータ、405 導線、406 ビーズ、407 冷却管、410 フレーム、411 支柱部、412 ロードセル、413 歪みゲージ、414 端子部、
415 導線、416、417 ビス穴、420 遮熱プレート、421 キャップ、422 熱反射板、423 貫通孔、424 フランジ、501 中空加圧部、502 バルブ、610 メインEV部、611 ステージ、612 メインピストン、613 メインシリンダ、614 ベローズ、615 メインルーム、616 メインバルブ、617 ピストンガイド、620 サブEV部、621 サブピストン、622 固定部、623 ピストンディスク、624 サブシリンダ、625 上部サブルーム、626 下部サブルーム、627 上部サブバルブ、628 下部サブバルブ
【技術分野】
【0001】
本発明は、加圧加熱モジュールに関する。
【背景技術】
【0002】
半導体装置の実効的な実装密度を向上させる技術のひとつとして、複数の半導体チップを積層させた立体構造がある。特に、半導体基板であるウェハの状態で複数枚を積層して、接合した後に個片化する手順により製造される半導体チップが、その生産性の高さから、近年注目を集めている。2枚のウェハを重ね合わせて接合する場合、互いの電極同士を接触させて加熱および加圧する(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−302858号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ウェハの直径が大きくなる傾向にある近年、重ねあわされる互いのウェハ全面において均一に加圧加熱することが困難になってきている。ウェハに加えられる圧力、温度に分布が生じると回路領域ごとに接合条件が異なることになり、一部の領域では過加圧による破損を招き、一部の領域では圧不足、温度不足による接触不良を招く。特に、ウェハ自体にも厚さのばらつきが存在するので、このようなばらつきも吸収した上で、ウェハ全体を均一に加圧加熱できる装置が望まれている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明の第1の態様における加圧加熱モジュールは、軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、押圧力を受けた支柱部に押圧されるヒータプレートと、ヒータプレートに押圧及び加熱されるステージ部を備え、支柱部がヒータプレートを押圧する第1の押圧面は、ヒータプレートがステージを押圧する第2の押圧面より小さい。
【0006】
なお、上記の発明の概要は、本発明の必要な特徴の全てを列挙したものではない。また、これらの特徴群のサブコンビネーションもまた、発明となりうる。
【図面の簡単な説明】
【0007】
【図1】貼り合わせ装置の全体構造を模式的に示す平面図である。
【図2】基板ホルダを上方から見下ろした様子を示す斜視図である。
【図3】基板ホルダを下方から見上げた様子を示す斜視図である。
【図4】加圧装置の全体構造を模式的に示す正面図である。
【図5】下部加圧モジュールの構造を概略的に示す断面図である。
【図6】ヒータプレートの形状および配置を示す下部ヒートモジュールの上面図である。
【図7】ヒータプレート、フレームおよび支柱部の位置関係を示す下部ヒートモジュールの上面図である。
【図8】ロードセルの上面図と正面図である。
【図9】電熱ヒータの配線を説明する断面図である。
【図10】昇降モジュールの構造を概略的に示す断面図である。
【図11】下部サブルームの体積を増加させてメインピストンを上昇させた様子を示す断面図である。
【発明を実施するための形態】
【0008】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0009】
図1は、加圧装置240を含む貼り合わせ装置100の全体構造を模式的に示す平面図である。貼り合わせ装置100は、共通の筐体101の内部に形成された大気環境部102および真空環境部202を含む。
【0010】
大気環境部102は、筐体101の外部に面して、複数の基板カセット111、112、113と、制御盤120とを有する。貼り合わせ装置100に含まれる各装置の各要素は、貼り合わせ装置100全体の制御および演算を司る制御盤120、または要素ごとに設けられた制御演算部が、統合制御、協調制御を行うことにより動作する。また、制御盤120は、貼り合わせ装置100の電源投入、各種設定等をする場合にユーザが外部から操作する操作部を有する。更に、制御盤120は、配備された他の機器と接続する接続部を含む場合もある。
【0011】
基板カセット111、112、113は、貼り合わせ装置100において接合される基板180、あるいは、貼り合わせ装置100において接合された基板180を収容する。また、基板カセット111、112、113は、筐体101に対して脱着自在に装着される。これにより、複数の基板180を一括して貼り合わせ装置100に装填できる。また、貼り合わせ装置100において接合された基板180を一括して回収できる。
【0012】
大気環境部102は、筐体101の内側にそれぞれ配された、プリアライナ130、仮接合装置140、基板ホルダラック150および基板取り外し部160と、一対のロボットアーム171、172とを備える。筐体101の内部は、貼り合わせ装置100が設置された環境の室温と略同じ温度が維持されるように温度管理される。これにより、仮接合装置140の精度が安定するので、位置決めを精確にできる。
【0013】
仮接合装置140は、対向する2枚の基板180に対して精確に位置合わせを行い、互いに重ね合わせる装置であるので、その調整範囲は非常に狭い。そこで、仮接合装置140への搬入に先立ち、仮接合装置140の調整範囲に基板180の位置が収まるように、プリアライナ130で個々の基板180の位置をおよそ把握する。仮接合装置140へは、プリアライナ130でおよそ把握した位置に基づいて向きを調整しつつロボットアーム172へ搬入する。これにより、仮接合装置140における位置決めを確実にすることができる。
【0014】
基板ホルダラック150は、複数の基板ホルダ190を収容して待機させる。なお、基板ホルダ190は、静電吸着により基板180を保持するが、具体的な構成については後述する。
【0015】
仮接合装置140は、固定ステージ141、移動ステージ142および干渉計144を含む。また、仮接合装置140を包囲して断熱壁145およびシャッタ146が設けられる。断熱壁145およびシャッタ146に包囲された空間は空調機等に連通して温度管理され、仮接合装置140における位置合わせ精度を維持する。
【0016】
仮接合装置140において、移動ステージ142は、基板180または基板180を保持した基板ホルダ190を搬送する。これに対して、固定ステージ141は固定された状態で、基板ホルダ190および基板180を保持する。
【0017】
基板取り外し部160は、後述する加圧装置240から搬出された基板ホルダ190から、当該基板ホルダ190に挟まれて接合された基板180を取り出す。基板ホルダ190から取り出された基板180は、ロボットアーム172、171および移動ステージ142により基板カセット113に戻されて収容される。また、基板180を取り出された基板ホルダ190は、基板ホルダラック150に戻されて待機する。
【0018】
なお、貼り合わせ装置100に装填される基板180は、既に回路パターンが複数周期的に形成されている単体のシリコンウエハ、化合物半導体ウエハ等である。また、装填された基板180が、既に複数のウエハを積層して形成された積層基板である場合もある。
【0019】
一対のロボットアーム171、172のうち、基板カセット111、112、113に近い側に配置されたロボットアーム171は、基板カセット111、112、113、プリアライナ130および仮接合装置140の間で基板180を搬送する。また、ロボットアーム171は、接合する基板180の一方を裏返す機能も有する。これにより、基板180において回路、素子、端子等が形成された面を対向させて接合することができる。
【0020】
一方、基板カセット111、112、113から遠い側に配置されたロボットアーム172は、仮接合装置140、基板ホルダラック150、基板取り外し部160、基板ホルダラック150およびエアロックチャンバ220の間で基板180および基板ホルダ190を搬送する。また、ロボットアーム172は、基板ホルダラック150に対する基板ホルダ190の搬入および搬出も担う。
【0021】
真空環境部202は、断熱壁210、エアロックチャンバ220、ロボットアーム230および複数の加圧装置240を有する。断熱壁210は、真空環境部202を包囲して、真空環境部202の高い内部温度を維持すると共に、真空環境部202の外部への熱輻射を遮断する。これにより、真空環境部202の熱が大気環境部102に及ぼす影響を抑制できる。
【0022】
ロボットアーム230は、加圧装置240のいずれかとエアロックチャンバ220との間で基板180および基板ホルダ190を搬送する。エアロックチャンバ220は、大気環境部102側と真空環境部202側とに、交互に開閉するシャッタ222、224を有する。
【0023】
基板180および基板ホルダ190が大気環境部102から真空環境部202に搬入される場合、まず、大気環境部102側のシャッタ222が開かれ、ロボットアーム172が基板180および基板ホルダ190をエアロックチャンバ220に搬入する。次に、大気環境部102側のシャッタ222が閉じられ、真空環境部202側のシャッタ224が開かれる。
【0024】
エアロックチャンバ220にはヒータ221が設けられており、搬入される基板180および基板ホルダ190は、加圧装置240で加圧加熱されるに先立って、ヒータ221で予備加熱される。すなわち、エアロックチャンバ220において雰囲気を交換する時間を利用して、加圧装置240に搬入される前に基板180および基板ホルダ190をある程度温めることで、加圧装置240のスループットを向上させる。なお、エアロックチャンバ220内の加熱は、基板180および基板ホルダ190がエアロックチャンバ220に搬入される前から行うことが好ましい。これにより、基板180および基板ホルダ190をエアロックチャンバ220に滞留させる時間を短縮できる。
【0025】
続いて、ロボットアーム230が、エアロックチャンバ220から基板180および基板ホルダ190を搬出して、加圧装置240のいずれかに装入する。加圧装置240は、基板ホルダ190に挟まれた状態で加圧装置240に搬入された基板180を熱間で加圧する。これにより基板180は恒久的に接合される。具体的な処理及び構成については後述する。
【0026】
加圧装置240は、基板180および基板ホルダ190を加圧する本体と、本体を配置する加圧チャンバとを含む。また、ロボットアーム230は、ロボットアームチャンバに設置される。すなわち、真空環境部202を構成する複数の加圧チャンバ、ロボットアームチャンバ、エアロックチャンバ220は、それぞれ個別に仕切られ、別々に雰囲気を調整することができる。また、図に示すように、真空環境部202は、ロボットアームチャンバを中心として、複数の加圧チャンバとエアロックチャンバ220が円周方向に並べて配置されている。
【0027】
真空環境部202から大気環境部102に基板180および基板ホルダ190を搬出する場合は、上記の一連の動作を逆順で実行する。これらの一連の動作により、真空環境部202の内部雰囲気を大気環境部102側に漏らすことなく、基板180および基板ホルダ190を真空環境部202に搬入または搬出できる。
【0028】
なお、複数の加圧装置240の一つを冷却装置に置き換えることもできる。このとき、冷却装置を設置する冷却チャンバもロボットアームチャンバの周囲に配置される。冷却装置は、加圧装置240で熱せられた基板180および基板ホルダ190が搬入され、これらを一定の温度まで冷やす役割を担う。冷却装置は、熱せられた基板180および基板ホルダ190が搬入されるに先立って、冷却チャンバを予め冷却しておくことが好ましい。
【0029】
ここで、2枚の基板180が重ね合わされて一体化されるまでの流れを簡単に説明する。貼り合わせ装置100が稼動を開始すると、ロボットアーム171により基板180が一枚ずつプリアライナ130に搬入され、プリアラインされる。このとき、まず、接合面が下向きとなる基板180からプリアラインを行う。プリアラインに並行して、ロボットアーム172は、基板180を保持する面を下向きにして収納されている基板ホルダ190を基板ホルダラック150から取り出し、載置面が下向きである固定ステージ141に搬送する。固定ステージ141は、搬送されてきた基板ホルダ190を真空吸着により固定する。なお、固定ステージ141は、移動ステージ142よりも上方に位置する。
【0030】
その後、ロボットアーム171は、プリアラインされた基板180をプリアライナーから取り出し、搬送途中で反転機構を用いて接合面を下向きにして、移動ステージ142から突出された複数のプッシュアップピン上に仮置きする。プッシュアップピン上に仮置きされた基板180は、プッシュアップピンによって固定ステージ141側に持ち上げられて、既に固定ステージ141に固定されている基板ホルダ190の載置面に押し当てられる。基板ホルダ190は、固定ステージ141から電力を供給されて、基板180を静電吸着して固定する。
【0031】
次に接合面が上向きとなる基板180がプリアラインされる。これに並行して、ロボットアーム172は、基板180を保持する面が上向きである基板ホルダ190を基板ホルダラック150から取り出し、載置面が上向きである移動ステージ142に搬送する。移動ステージ142は、搬送されてきた基板ホルダ190を真空吸着により固定する。なお、基板180を保持する面が上向きである基板ホルダ190が移動ステージ142に搬送されるときには、プッシュアップピンは、移動ステージ142のステージ面から退避している。
【0032】
その後、ロボットアーム171は、プリアラインされた基板180をプリアライナーから取り出し、既に移動ステージ142に固定されている基板ホルダ190の載置面に載置する。基板ホルダ190は、移動ステージ142から電力を供給されて、基板180を静電吸着して固定する。このようにして、それぞれのステージに基板ホルダ190と基板180が、互いの接合面が対向するように固定される。
【0033】
互いの接合面が対向するように固定されると、移動ステージ142を、干渉計144によりその位置を監視しつつ精密に移動させて、載置された基板180の接合面を固定ステージ141に保持された基板180の接合面に対して位置合わせする。位置合わせが完了すると、移動ステージ142を固定ステージ141側へ移動させ、接合面同士を接触させて仮接合する。仮接合は、向かい合う2つの基板ホルダ190のそれぞれに設けられた吸着機構を作用させて一体化することにより実現する。
【0034】
仮接合されて一体化された2つの基板180と2つの基板ホルダ190は、ロボットアーム172によりエアロックチャンバ220に搬送される。エアロックチャンバ220に搬送された基板180および基板ホルダ190は、ロボットアーム230により加圧装置240に装入される。
【0035】
加圧装置240において加熱および加圧されることにより、2つの基板180は互いに接合されて恒久的に一体となる。その後、基板180および基板ホルダ190は、真空環境部202から搬出されて、基板取り外し部160に運び込まれ、基板取り外し部160で基板180と基板ホルダ190は互いに分離される。
【0036】
貼り合わされた基板180は、基板カセット113に搬送して収容される。この場合、移動ステージ142は、ロボットアーム172からロボットアーム171への搬送にも携わる。また、基板ホルダ190は、ロボットアーム172により基板ホルダラック150へ戻される。
【0037】
次に、基板ホルダ190について説明する。図2は、基板ホルダ190を上方から見下ろした様子を示す斜視図である。図では、基板ホルダ190の上面に基板180が保持されている。また、図3は、基板ホルダ190を下方から見上げた様子を示す斜視図である。
【0038】
基板ホルダ190は、ホルダ本体191、吸着子192および電圧印加端子194を有して、全体としては基板180よりも径がひとまわり大きな円板状をなす。ホルダ本体191は、セラミックス、金属等の高剛性材料により一体成形される。吸着子192は、強磁性体により形成され、基板180を保持する保持面において、保持した基板180よりも外側である外周領域に複数配される。図の場合、2個を一組として120度毎に合計6個の吸着子192が配されている。電圧印加端子194は、基板180を保持する面の裏面に埋設される。
【0039】
ホルダ本体191は、その保持面において高い平面性を有する。また、ホルダ本体191は、保持した基板180を静電吸着する領域の外側に、ホルダ本体191を表裏に貫通して形成された、それぞれ複数の位置決め穴193を有する。更に、ホルダ本体191は、保持した基板180を静電吸着する領域の内側に、ホルダ本体191を表裏に貫通して形成された、複数の挿通孔195を有する。挿通孔195にはプッシュアップピンが挿通され、基板180を基板ホルダ190から離脱させることができる。
【0040】
位置決め穴193は、固定ステージ141等に設けられている位置決めピンに嵌合して、基板ホルダ190の位置決めに利用される。吸着子192は、保持面と略同じ平面内に上面が位置するように、ホルダ本体191に形成された陥没領域に配設される。電圧印加端子194は、ホルダ本体191の裏面に埋め込まれる。電圧印加端子194を介して電圧を供給することにより、基板ホルダ190と基板180との間に電位差を生じさせて、基板180を基板ホルダ190に静電吸着する。固定ステージ141等にはそれぞれ電圧供給端子が設けられており、基板180と基板ホルダ190の静電吸着を維持できる。
【0041】
移動ステージ142に載置する基板ホルダ190と、固定ステージ141に載置する基板ホルダ190は、若干構成が異なる。具体的には、吸着子192に替えて、吸着子192に対向するように複数のマグネットが配されている。吸着子192とマグネットが結合することにより、2枚の基板180を挟持して2つの基板ホルダ190が一体化される。以下、一体化された2枚の基板180と2つの基板ホルダ190を基板ホルダ対と呼ぶ。
【0042】
次に加圧装置240の構造について詳細に説明する。図4は、加圧装置240の全体構造を模式的に示す正面図である。加圧装置240は、上述のように真空環境下に調整された加圧チャンバ内に設置されている。加圧装置240は、天井側に設置される上部トッププレート31、上部ヒートモジュール41および上部圧力制御モジュール51と、床面側に設置される下部トッププレート32、下部ヒートモジュール42、下部圧力制御モジュール52および昇降モジュール60によって構成される。上部トッププレート31、上部ヒートモジュール41および上部圧力制御モジュール51は、上部加圧モジュールを形成し、下部トッププレート32、下部ヒートモジュール42および下部圧力制御モジュール52は、下部加圧モジュールを形成する。なお、本実施形態においては、上部ヒートモジュール41および下部ヒートモジュール42により、上部トッププレート31および下部トッププレート32を加熱する機能を有するので、上部加圧モジュールおよび下部加圧モジュールは、それぞれ加熱モジュールとしての役割も同時に担うことができる。
【0043】
下部トッププレート32には、2枚の基板180を挟持して2つの基板ホルダ190が一体化された基板ホルダ対が、ロボットアーム230によって搬入され、載置される。基板ホルダ対は、昇降モジュール60が上昇することにより上部トッププレート31と接触し、上部加圧モジュールと下部加圧モジュールに挟さまれて加圧、加熱される。
【0044】
対向して設置される上部加圧モジュールと下部加圧モジュールは、同一の構造を備えるモジュールである。そこで、下部加圧モジュールを代表としてその構造を以下に説明する。
【0045】
図5は、下部加圧モジュールの構造を概略的に示す断面図である。なお、図は主要な構造物を簡略化して一部を省略しつつ示す。
【0046】
基板ホルダ体を載置するステージ部としての役割を担う下部トッププレート32は、炭化珪素からなる円形状のプレートであり、周縁部において下部ヒートモジュール42にビス止めされる。下部ヒートモジュール42は、円筒形状の内部に、下部トッププレート32の基板ホルダ体を載置する面とは反対側の面において接する複数のヒータプレート401、402、403を備えて構成される。ヒータプレート401、402、403は、加熱部であり、例えば銅を素材として形成され、それぞれの内部に電熱ヒータ404が埋め込まれている。電熱ヒータ404は導線405により電力が供給されるが、その被覆としては高熱に耐えられるように、例えばセラミックにより形成されるビーズ406が用いられる。ビーズ406は、複数個連なって導線405を貫通させ、加熱空間から非加熱空間へ導出する。
【0047】
ヒータプレート401、402、403は、加熱制御時には電熱ヒータ404により加熱されてその熱を下部トッププレート32へ伝達させる。また、加熱終了後の冷却制御時には、クーラとして機能する冷却管407により冷却される。ヒータプレート401、402、403は、下部トッププレート32の中心を通る中心軸から放射状に形成されたフレーム410により支持、固定されている。
【0048】
フレーム410は、複数の支柱部411によりその軸方向の一端に連結されて支持されている。そして、各々の支柱部411の他端は、それぞれロードセル412に連結されている。それぞれのロードセル412は、支柱部411が連結される面とは反対側の面において、下部圧力制御モジュール52の主要な要素である中空加圧部501の外側で接するように設置される。ロードセル412は、圧力検出部であり、中空加圧部501と支柱部411に介在して中空加圧部501が支柱部411を押圧する圧力を検出する。
【0049】
下部ヒートモジュール42の内部空間は、下部トッププレート32の基板ホルダ対の載置面に対して平行に設置される遮熱プレート420により、上下に加熱空間と非加熱空間に分割される。遮熱プレート420は、ヒータプレート401、402、403によって熱せられる加熱空間の熱を、高温を嫌う中空加圧部501、ロードセル412等が設置される非加熱空間へできる限り伝えない機能を担う仕切り板である。遮熱プレート420には、支柱部411を貫通させる貫通孔が設けられている。すなわち、支柱部411は加熱空間と非加熱空間にまたがって存在する。また、遮熱プレート420には、導線405を貫通させる貫通孔も設けられており、その貫通孔の周囲には、導線405を貫通孔から引き出す方向とは異なる方向へ導出させるキャップ421が設置されている。
【0050】
遮熱プレート420と中空加圧部501の間には、遮熱プレート420と平行に、熱反射板422が互いに離間して複数設置される。熱反射板422にも、遮熱プレート420と同様に、支柱部411を貫通させる貫通孔が設けられている。これらの熱反射板422は、例えばアルミニウムなどの金属板により形成される。そして、少なくともその1枚の加熱空間側の表面には、下部トッププレート32の目標加熱温度近傍の輻射線の波長を反射する多層膜が形成される。下部トッププレート32の目標加熱温度は、例えばウェハである基板180を接合する場合には450℃〜500℃である。熱反射板422は、目標加熱温度に応じて取り替えられるように構成しても良い。これにより、ヒータプレート401、402、403から中空加圧部501への熱の伝達を緩和することができる。また、遮熱プレート420と平行に設けるだけでなく、支柱部411の軸方向と平行にも設けても良い。これにより下部ヒートモジュール42から外部への熱漏れも緩和することができる。
【0051】
中空加圧部501は、ゴムシート等から形成される袋状の圧力制御部であり、その内部は、流体により充填されている。流体としては、空気、水、オイルが用いられる。例えば、環境特性に優れたハイドロフルオロエーテルなどが用いられる。そして、内部に充填する流体量を、中空加圧部501と供給管503とに設置されたバルブ502を制御することにより調整する。具体的には、供給管503の他端は、図示しないポンプに接続されており、バルブ502と共にポンプを制御することで、中空加圧部501の内部の流体量を増減させる。中空加圧部501は、内部の流体量により膨張または収縮する。特に、下部圧力制御モジュール52が昇降モジュール60から受ける圧力との関係において、バルブ502を介して内部に流入出させる流体量を調整すると、複数のロードセル412と接する面を、フラットにしたり、周縁部を凸状にしたり、中心部を凸状にコントロールすることができる。
【0052】
中空加圧部501は、ゴムシートのような弾性素材により袋を形成するだけでなく、例えば、複数のロードセル412と接する面側を変形板とし、昇降モジュール60側と外周側を高剛性板として形成する箱状の形態であっても良い。このような形態であっても、内部を気密な袋状に保てば、外部から出入させる流体を制御して内圧を調整することができ、ロードセル412と接する面に対して圧力をコントロールすることができる。
【0053】
次に、ヒータプレート401、402、403の形状および配置について説明する。図6は、ヒータプレート401、402、403の形状および配置を示す下部ヒートモジュール42の上面図である。
【0054】
図示するように、下部トッププレート32の中心を通る中心軸を中心として、真中に位置する円形のヒータプレート401が1個、その外周部に扇形のヒータプレート402が6個、さらにその外周部に扇形のヒータプレート403が12個配置されている。ヒータプレート402、403の扇形は、中心のヒータプレート401と同心円の弧を有する。
【0055】
ヒータプレート401、402、403によって覆われる平面領域は、下部トッププレート32に載置される基板ホルダ190の載置面に対応する領域よりも広い。これにより、基板ホルダ190の裏面に対して均一に加熱することができる。また、ヒータプレート401、402、403のそれぞれは、互いに平行を保って離間して配置される。これにより、ヒータプレート401、402、403がそれぞれに埋め込まれている電熱ヒータ404により熱せられて膨張しても、互いに接触することを回避できる。互いの間隔は、目標加熱温度等によって予め設定されるが、例えば、ヒータプレート401、402、403が銅により形成され、下部トッププレート32の径が約330mmであって、目標加熱温度が450℃である場合には、1mm程度に設定される。
【0056】
また、それぞれのヒータプレート401、402、403の加熱面は、互いに同じ面積を有する。したがって円形および扇形の形状は、互いに同じ面積となるように径、中心角等が設計される。また、図の例では径方向を3段に設定してそれぞれ個数を定めたが、径方向の段数も、一段あたりの個数も任意に設定することができる。さらにそれぞれのヒータプレート401、402、403の厚さも同一とすれば、それぞれの熱容量も同一となるので、より好ましい。
【0057】
クーラとして機能する冷却管407は、ヒータプレート401、402、403のひとつ以上を冷却するように配管される。例えば、図示するようにヒータプレート402、403のいずれかと接するように冷却管407としてのパイプが張り巡らされ、その中を冷媒が循環するように外部のポンプが制御される。パイプの素材としては、ヒータプレート401、402、403と同じ素材が好ましい。同じ素材でなくても、線膨張率が同じであれば、接触面において温度変化による熱摺動が生じないので、パイプの素材として適用できる。
【0058】
図7は、ヒータプレート401、402、403、フレーム410および支柱部411の位置関係を示す下部ヒートモジュール42の上面図である。フレーム410は、中心部分に設けられた円環部から放射状に複数の腕部を伸ばした形状をなす。そして、円環部でビス408によりヒータプレート401を固定し、腕部で同様にビス408によりヒータプレート402、403を固定している。ビス408は、図示するように、それぞれのヒータプレート401、402、403において中心線上、回転対称または左右対称となる位置に配置することが好ましい。
【0059】
中空加圧部501からの圧力は、複数の支柱部411およびフレーム410を介してヒータプレート401、402、403に伝達される。そして、ヒータプレート401、402、403が下部トッププレート32を押圧すると共に加熱する。中空加圧部501を支柱部411の軸方向に押圧力を発生させるアクチュエータとみなせば、この押圧力は、例えば一つのヒータプレート402を押圧する支柱部411に着目すると、支柱部411→ヒータプレート402→下部トッププレート32の順に伝達される。そして、その押圧面の関係について言えば、支柱部411がヒータプレート402に対して押圧する押圧面は、ヒータプレート402が下部トッププレート32に対して押圧する押圧面よりも小さい。つまり、押圧力は伝達する方向に向かって広がりつつ伝えられる。換言すれば、局在的な圧力が、徐々に分散されて伝えられる。このようにして中空加圧部501で発生させた圧力を下部トッププレート32へ伝えることにより、下部トッププレート32上に均一な押圧力を発生させる、あるいは、基板180の全体を均一に加圧できるように下部トッププレート32上に意図的ななだらかな圧力分布を発生させることができる。なお、本実施形態においては、ヒータプレート401、402、403と支柱部411の間にはフレーム410が介在するが、それぞれの支柱部411近傍に着目すれば、局在的な圧力が徐々に分散されて伝えられることに変わりはない。
【0060】
また、本実施形態においては、内部の流体量を調整することにより膨張または収縮する単一の中空加圧部501を用いて複数の支柱部411を押圧する構成を説明するが、支柱部411のそれぞれを個別に押圧するアクチュエータを用いて構成する場合にも応用できる。すなわち、アクチュエータによって発生される押圧力が局在的であっても、徐々に押圧力を分散させて、広い面で下部トッププレート32を押圧することができる。
【0061】
次に、中空加圧部501の外側で接して、支柱部411との間に介在するロードセル412について説明する。図8は、ロードセル412の上面図と正面図である。ロードセル412の上面の2箇所に圧電素子である歪みゲージ413を貼着し、同様に下面にも2箇所に歪みゲージ413を貼着する。4箇所に貼着された歪みゲージの出力線は、側面の端子部414にまとめられて、導線415を介して外部へ接続される。
【0062】
上面の中心付近には、支柱部411を連結するビス穴416が設けられている。また、ビス穴416に対して対称となるように、2つのビス穴417が設けられている。このビス穴417を介して、ロードセル412を中空加圧部501に固定する。
【0063】
このようにして設けられた複数のロードセル412の出力を監視することにより、それぞれの支柱部411に加えられる圧力を検出することができる。そして、検出された圧力に応じて、中空加圧部501の圧力を調整したり、昇降モジュール60の昇降を調整したりすることができる。また、想定される範囲を超える異常圧力を検出した場合には、加圧を停止する制御を行うこともできる。
【0064】
また、圧電素子は、圧力が加えられるとその大きさに応じて電位差を生じるので加えられた圧力を検出することができる一方、逆に電力を加えると物理的な変形を生じさせることができる。そこで、支柱部411の圧力を検出しつつ、特定の領域に圧力分布が生じたときには、その領域またはその領域以外の領域のロードセル412の歪みゲージ413に電力を供給して、支柱部411に加えられる圧力を増加させるように制御できる。このようにロードセル412を補助アクチュエータとして作用させることにより、より精密な圧力制御を実現することができる。特に、下部トッププレート32に載置された基板ホルダ体を均等に押圧する場合に好適である。なお、ロードセル412の配置は上記の位置に限らず、例えば昇降モジュール60の上に複数設けて、下部圧力制御モジュールに加えれらる圧力に対して圧力を調整するように構成しても良い。
【0065】
図9は、電熱ヒータ404の配線を説明する断面図である。ここでは、ヒータプレート401を代表例として説明するが、ヒータプレート402、403の構成も同様である。
【0066】
図示するように、ヒータプレート401に埋め込まれた電熱ヒータ404から導線405が引き出されている。それほど高温にならない環境下においては、導線は通常ビニール皮膜により保護されているが、本実施形態においては、ヒータプレート401は450℃〜500℃にまで熱せられるので、ビニール皮膜は用いることができない。また、導線周りの加熱空間および非加熱空間は真空雰囲気であるので、真空雰囲気下においてガスを発生する樹脂などの素材を用いることもできない。そこで、加熱空間の温度よりも高い融点を有し、かつ、真空雰囲気下でもガスを発生しない絶縁素材により形成されたビーズ406を、導線405の保護材として用いる。例えば、素材としてはセラミックが好適である。導線405を保護するビーズ406は、導線405が曲折できるように、導線405を貫通させて、加熱空間から非加熱空間に亘り複数個が連なって構成される。
【0067】
加熱空間と非加熱空間は遮熱プレート420により分割されているが、遮熱プレート420には、導線405を挿通させる貫通孔423が設けられている。そして、貫通孔423の周縁部には、フランジ424が設けられている。フランジ424は、導線405の挿通方向に折り曲げられて形成された立上部である。貫通孔423とフランジ424により貫通部を構成する。
【0068】
ビーズ406は、導線405が曲折されるように、互いに若干の隙間を持って連なっている。つまり、ビーズ406は導線405に沿って移動できるよう、それぞれ可動量を有する。ここで、可動量が、貫通部の高さhよりも大きいと、導線405が直接貫通部に接触してしまう恐れがある。そこで、この可動量は、貫通部の高さhよりも小さくなるように設定されている。
【0069】
次に昇降モジュール60の構造について説明する。図10は、昇降モジュール60の構造を概略的に示す断面図である。なお、図は主要な構造物を簡略化して一部を省略しつつ示す。
【0070】
昇降モジュール60は、上下に2段の構造をとる。下部圧力制御モジュール52側のメインEV部610と床面側のサブEV部620である。メインEV部610は、ステージ611で下部圧力制御モジュール52に締結される。昇降モジュール60全体としては、このステージ611が床面に対して昇降することにより、下部圧力制御モジュール52を上下させ、ひいては基板ホルダ体に圧力を加えることができる。
【0071】
メインEV部610は、径の大きな1つのシリンダ−ピストン機構から構成され、サブEV部620は、径の小さな3つのシリンダ−ピストン機構が、上方から見たときに円周方向に120°間隔に配置されて構成される。ただし、メインEV部610とサブEV部620は、互いに独立して上下に積み重なったものではなく、相互に作用を及ぼしながらステージ611を昇降させるように工夫されている。以下にそれぞれの構造について説明する。
【0072】
メインEV部610は、ステージ611をその上面とするメインピストン612、メインピストンに外嵌するメインシリンダ613、およびメインシリンダ613に接続されメインピストン612の昇降に追従するベローズ614を備える。メインシリンダ613とメインピストン612の間に形成される空間であるメインルーム615は、メインシリンダ613が昇降しても気密に保たれる。メインルーム615に対しては、メインバルブ616が接続されており、外部から流体が流入出される。メインルーム615は流体で満たされており、この流体の流入出をメインバルブ616を制御することにより、メインルーム615の流体量を変化させることができる。メインルーム615の流体量を変化させることにより、メインピストン612を上下させることができる。
【0073】
サブEV部620は、本実施形態においては上述のように3つ備えるが、それぞれがサブピストン621、およびサブピストン621に外嵌するサブシリンダ624を備える。サブピストン621は、メインシリンダ613の外側からから、メインシリンダ613に設けられたピストンガイド617の内部に挿通され、メインルーム615内に到達している。そして、メインルーム615の内部に位置するサブピストン621の先端に、メインピストン612と固定する固定部622が設けられている。固定部622により、サブピストン621は、メインピストン612に締結されている。
【0074】
サブピストン621は、固定部622が設けられる端とは反対の端に、サブシリンダ624と外嵌するピストンディスク623を備える。そして、サブシリンダ624内の空間は、ピストンディスク623により、メインシリンダ613側に位置する上部サブルーム625と、床面側に位置する下部サブルーム626とに分割される。
【0075】
上部サブルーム625も下部サブルーム626も共に気密に保たれている。そして、上部サブルーム625に対しては、上部サブバルブ627が接続されており、外部から流体が流入出される。また、下部サブルームに626に対しては、下部サブバルブ628が接続されており、外部から流体が流入出される。上部サブルーム625と下部サブルーム626は流体で満たされている。また、上部サブルーム625と下部サブルーム626の体積の総和は常に一定であるので、上部サブバルブ627と下部サブバルブ628を協調制御して、上部サブルーム625と下部サブルーム626の体積比を変化させる。
【0076】
上部サブルーム625の体積を増やせば、下部サブルーム626の体積が減少し、サブピストン621は下降する。そして、サブピストン621はメインピストン612に接続されているので、メインピストン612も下降する。このとき、メインバルブ616も協調制御され、メインピストン612の下降に伴うメインルーム615の体積減少分だけ流体が外部に放出される。
【0077】
逆に、下部サブルーム626の体積を増やせば、上部サブルーム625の体積が減少し、サブピストン621は上昇する。そして、メインピストン612も上昇する。このとき、メインバルブ616も協調制御され、メインピストン612の上昇に伴うメインルーム615の体積増加分だけ流体をメインルーム615内へ流入させる。図11は、下部サブルーム626の体積を増加させてメインピストン612を上昇させた様子を示す断面図である。
【0078】
なお、メインバルブ616を用いてメインルーム615内の流体量を調整してメインピストン612を昇降させるときにも、サブピストン621が追従する。したがって、このときにも、上部サブバルブ627と下部サブバルブ628を協調制御し、サブピストン621の追従に伴う上部サブルーム625と下部サブルーム626の体積変化を許容する。
【0079】
また、メインルーム615、上部サブルーム625および下部サブルーム626に充填される流体は、空気、水、オイルが用いられる。例えば、環境特性に優れたハイドロフルオロエーテルなどが用いられる。
【0080】
このように昇降モジュール60を、メインEV部610とサブEV部620の2段で構成することにより、ステージ611をどのように昇降させたいかにより制御を異ならせることができる。具体的には、所定の速度以上の速さで移動させたいときには、小体積の流入出により大きな変位が得られるサブEV部620の流体を制御し、所定の圧力以上の圧力を加えたいときには、大体積の流入出によっても僅かな変位に留まるメインEV部610の流体を制御する。また、所定の速度未満の速さで移動させたいときにも、メインEV部610の流体を制御すれば良い。
【0081】
以上の加圧装置240の実施形態によれば、詳細に説明した加圧モジュールと同一構造を備える上部加圧モジュールを互いに対向させて配置し、昇降モジュール60により、下部加圧モジュール上に載置された基板ホルダ体を上部加圧モジュールに接触させて、加圧加熱する。しかし、実施形態はこれに限らず、例えば天井側に上部加圧モジュールを設置する代わりに平面定盤を設置して、単に下方から上方へ押し付ける構造であっても、ある程度の圧力均一性を期待することができる。
【0082】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0083】
31 上部トッププレート、32 下部トッププレート、41 上部ヒートモジュール、42 下部ヒートモジュール、51 上部圧力制御モジュール、52 下部圧力制御モジュール、60 昇降モジュール、100 貼り合わせ装置、101 筐体、102 大気環境部、111、112、113 基板カセット、120 制御盤、130 プリアライナ、140 仮接合装置、141 固定ステージ、142 移動ステージ、144 干渉計、145 断熱壁、146、222、224 シャッタ、150 基板ホルダラック、160 基板取り外し部、171、172、230 ロボットアーム、180 基板、190 基板ホルダ、191 ホルダ本体、192 吸着子、193 位置決め穴、194 電圧印加端子、195 挿通孔、202 真空環境部、210 断熱壁、220 エアロックチャンバ、221 ヒータ、240 加圧装置、401、402、403 ヒータプレート、404 電熱ヒータ、405 導線、406 ビーズ、407 冷却管、410 フレーム、411 支柱部、412 ロードセル、413 歪みゲージ、414 端子部、
415 導線、416、417 ビス穴、420 遮熱プレート、421 キャップ、422 熱反射板、423 貫通孔、424 フランジ、501 中空加圧部、502 バルブ、610 メインEV部、611 ステージ、612 メインピストン、613 メインシリンダ、614 ベローズ、615 メインルーム、616 メインバルブ、617 ピストンガイド、620 サブEV部、621 サブピストン、622 固定部、623 ピストンディスク、624 サブシリンダ、625 上部サブルーム、626 下部サブルーム、627 上部サブバルブ、628 下部サブバルブ
【特許請求の範囲】
【請求項1】
軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、
前記押圧力を受けた前記支柱部に押圧されるヒータプレートと、
前記ヒータプレートに押圧及び加熱されるステージ部を備え、
前記支柱部が前記ヒータプレートを押圧する第1の押圧面は、前記ヒータプレートが前記ステージを押圧する第2の押圧面より小さい加圧加熱モジュール。
【請求項2】
前記ステージ部は、複数の前記ヒータプレートにより押圧及び加熱される請求項1に記載の加圧加熱モジュール。
【請求項3】
複数の前記ヒータプレートを支持するフレームを更に備え、
前記ヒータプレートは、前記フレームを介して前記支柱部に押圧される請求項1または2に記載の加圧加熱モジュール。
【請求項4】
前記ヒータプレートの前記第2の押圧面は、それぞれ同じ面積を有する請求項2または3に記載の加圧加熱モジュール。
【請求項5】
被処理体を載置する前記ステージ部の載置面は円形であり、前記ヒータプレートの各々の外形は、前記円形の周方向及び径方向に沿って形成される扇形または円形である請求項2から4のいずれか1項に記載の加圧加熱モジュール。
【請求項6】
前記ヒータプレートの各々は、同じ熱容量有する請求項2から5のいずれか1項に記載の加圧加熱モジュール。
【請求項7】
前記ヒータプレートの少なくとも一つを冷却するクーラを更に備える請求項2から6のいずれか1項に記載の加圧加熱モジュール。
【請求項8】
前記クーラは、前記ヒータプレートの少なくとも一つに接するパイプと、前記パイプに循環させる冷媒を備える請求項7に記載の加圧加熱モジュール。
【請求項9】
前記パイプは、前記ヒータプレートと同じ線膨張率を有する素材からなる請求項8に記載の加圧加熱モジュール。
【請求項1】
軸方向に押圧力を発生させるアクチュエータに接続された支柱部と、
前記押圧力を受けた前記支柱部に押圧されるヒータプレートと、
前記ヒータプレートに押圧及び加熱されるステージ部を備え、
前記支柱部が前記ヒータプレートを押圧する第1の押圧面は、前記ヒータプレートが前記ステージを押圧する第2の押圧面より小さい加圧加熱モジュール。
【請求項2】
前記ステージ部は、複数の前記ヒータプレートにより押圧及び加熱される請求項1に記載の加圧加熱モジュール。
【請求項3】
複数の前記ヒータプレートを支持するフレームを更に備え、
前記ヒータプレートは、前記フレームを介して前記支柱部に押圧される請求項1または2に記載の加圧加熱モジュール。
【請求項4】
前記ヒータプレートの前記第2の押圧面は、それぞれ同じ面積を有する請求項2または3に記載の加圧加熱モジュール。
【請求項5】
被処理体を載置する前記ステージ部の載置面は円形であり、前記ヒータプレートの各々の外形は、前記円形の周方向及び径方向に沿って形成される扇形または円形である請求項2から4のいずれか1項に記載の加圧加熱モジュール。
【請求項6】
前記ヒータプレートの各々は、同じ熱容量有する請求項2から5のいずれか1項に記載の加圧加熱モジュール。
【請求項7】
前記ヒータプレートの少なくとも一つを冷却するクーラを更に備える請求項2から6のいずれか1項に記載の加圧加熱モジュール。
【請求項8】
前記クーラは、前記ヒータプレートの少なくとも一つに接するパイプと、前記パイプに循環させる冷媒を備える請求項7に記載の加圧加熱モジュール。
【請求項9】
前記パイプは、前記ヒータプレートと同じ線膨張率を有する素材からなる請求項8に記載の加圧加熱モジュール。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−82367(P2011−82367A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−233884(P2009−233884)
【出願日】平成21年10月7日(2009.10.7)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月7日(2009.10.7)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]