
加熱型試料分析装置
【課題】 るつぼに入れた試料を加熱融解して発生するガスの成分を分析する加熱型試料分析装置において、エラー発生時に試料を廃棄することなく復旧が可能で、なおかつ、アルゴリズムや構造の複雑化を可及的に抑制できるものを提供する。
【解決手段】所定の試料導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置P1に置かれたるつぼ81に入れ替えるか、又は加熱位置P1外に置かれたるつぼ81に入れ替えてそのるつぼ81を加熱位置P1に搬送する試料搬送工程と、試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼ81を、前記導入位置とは別に設定した退避位置に搬送した後、所定の待機状態となって動作を停止する退避工程と、前記退避位置に試料搬送用容器又はるつぼ81が有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構2を設けた。
【解決手段】所定の試料導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置P1に置かれたるつぼ81に入れ替えるか、又は加熱位置P1外に置かれたるつぼ81に入れ替えてそのるつぼ81を加熱位置P1に搬送する試料搬送工程と、試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼ81を、前記導入位置とは別に設定した退避位置に搬送した後、所定の待機状態となって動作を停止する退避工程と、前記退避位置に試料搬送用容器又はるつぼ81が有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構2を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、金属などの試料を加熱融解することによって、試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置に関するものである。
【背景技術】
【0002】
この種の加熱型試料分析装置は、例えば特許文献1に示すように、上部電極及び下部電極に狭持された黒鉛るつぼに金属試料を収容して、電圧を印加することによって前記るつぼ内の測定試料を加熱融解し、それによって発生したガス成分を分析することにより、金属試料に元々含まれている酸素などの元素量を測定することができる。
【0003】
そして、このような分析装置を用いて試料を分析する場合には、当然のことながら、試料の計量や、るつぼへの試料投入、電極へのるつぼ載置など、主として試料搬送に係る種々の作業を所定手順にしたがって行う必要があり、従来は、一部を自動化した例はあるものの、一般的にはオペレータがこの作業を人手で行っている。
【特許文献1】特許2949501号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
一方、近時、例えば工場等での生産ラインにこの分析装置を組み込んで、インライン分析するといった理由から、前記作業の全自動化への要望があり、これに対応すべく、本発明者らは、6軸ロボットを利用して前記作業を全自動化したシステムを開発しつつある。
【0005】
ところで、ロボットを利用するなどして全自動化する場合には、停電などの不測のエラー発生時における復旧を考慮する必要がある。復旧させる最も単純な方法の一つとしては、エラー発生を検知した時点で作業を中止し、試料を廃棄して、初期状態に戻ればよい。
【0006】
しかしながら、試料の中には、希少なものや代替のきかないものがあり、試料を廃棄するのは好ましくない。かといって、試料廃棄を避けるために、復旧時には、エラー発生直前に戻って再開するようなシーケンスにすると、エラー発生時の各状況を記憶しておいて再現しなければならないうえ、あらゆるエラー発生タイミングやエラー種類を考慮しなければならなくなり、復旧アルゴリズムが極めて複雑になる恐れがある。
【0007】
本発明はかかる問題点を鑑みてなされたものであって、エラー発生時に、試料を廃棄することなく復旧が可能で、なおかつ、アルゴリズムや構造の複雑化を可及的に抑制できる加熱型試料分析装置を提供することをその主たる所期課題としている。
【課題を解決するための手段】
【0008】
すなわち本発明に係る加熱型試料分析装置は、るつぼに入れた試料を加熱融解することにより、当該試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置もので、所定導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置に置かれたるつぼに入れ替えるか、又は加熱位置外に置かれたるつぼに入れ替えてそのるつぼを加熱位置に搬送する試料搬送工程と、試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼを、前記導入位置とは別に設定した退避位置に搬送した後、待機状態となって動作を停止する退避工程と、前記退避位置に試料搬送用容器又はるつぼが有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構を具備していることを特徴とする。
【0009】
退避位置に試料搬送用容器又はるつぼが有るか無いかを検知するには、試料搬送機構側に、光を利用するなどした物体検知センサを設けてもよいが、より簡単には、前記退避位置側に、前記物体検知センサを設ければよい。
【0010】
前記試料搬送機構の具体的態様としては、ロボットアームとその先端に取り付けられた一対の把持爪を具備し、前記試料搬送用容器又はるつぼを、前記把持爪によって把持しながら搬送するものを挙げることができる。
【発明の効果】
【0011】
このように構成した本発明によれば、試料搬送途中にエラーが生じたとき、試料の入った試料搬送用容器を、前記退避位置に載置するようにしており、また、その退避位置に置かれた試料搬送用容器を例えばオペレータが取り除かない限り、試料搬送機構が動作しないようにしているので、エラーが生じたことをオペレータは確実に知ることができるうえ、試料が、装置側で勝手に廃棄されてしまうことを確実に防止できる。
【0012】
さらに、エラーから復旧する場合、常に初期状態に戻るだけであり、その際に退避位置に置いた試料搬送用容器が取り除かれたことを装置が確認して初めて、初期状態からリスタートするだけであるから、復旧アルゴリズム(復旧プログラム)が非常に簡単なものとなる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面を参照して説明する。
【0014】
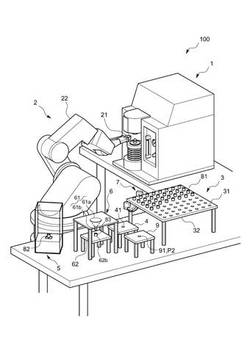
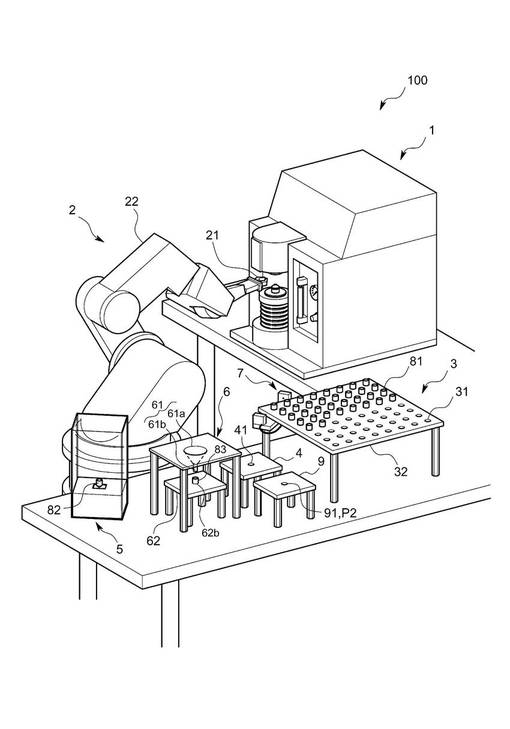
図1に示す加熱型試料分析装置100は、金属試料(以下、単に試料とも言う)を加熱溶解し、その際に発生するガス成分を分析することによって、当該試料中に含まれている元素を測定するもので、試料搬送機構たる6軸ロボット2と、その周囲に配置された分析装置本体1、及び周辺機器とから構成されている。
【0015】
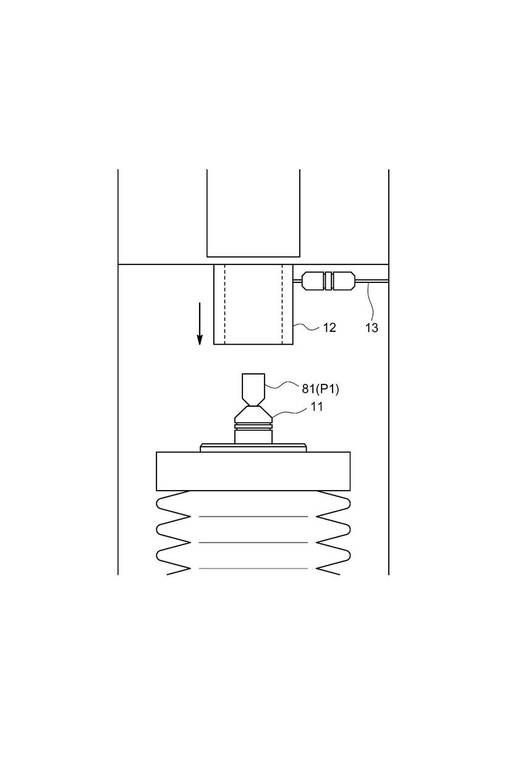
分析装置本体1から説明すると、この分析装置本体1の正面には、図1、図3に示すように、上部電極12及び下部電極11が上下に離間させて設けられており、下部電極11上に、試料を収容したるつぼ81を載置できるように構成してある。この図3に示するつぼ位置が加熱位置P1である。るつぼ81は、上部が開口した円筒状をなす黒鉛を素材としたもので、下端部は先細りのテーパー形状をなしている。分析時は、加熱位置P1に置かれたるつぼ81に対して、下部電極11が上方にスライドし、上部電極12との間でるつぼ81を挟み込む。この状態で、上部電極12の上方に設けられた図示しない試料投入口から、るつぼ81内に試料を投入されると、その後、電極11、12間に電流が印加され、黒鉛るつぼ81が発熱して内部の試料が加熱融解される。融解した試料から発生したガスは、図示しない分析部に送られて成分が測定され、その結果から、試料に元々含まれていた元素が分析される。例えば、試料中の酸素量を測定する場合には、試料の融解によって反応生成物であるCO(一酸化炭素)を発生させ、COを例えば分析部を構成する非分散形赤外線検出器を用いて測定し、そのCO値に基づいて当該試料中に存在していた酸素量を測定・算出する。その他、反応生成物とそれに応じた分析部を設定することにより、水素や硫黄、窒素などの成分も測定することができる。なお、分析後は、使用したるつぼ81は、試料と共に廃棄処分される。
【0016】
次に6軸ロボット2及び周辺機器について説明する。
【0017】
6軸ロボット2は、図1、図3に示すように、ロボットアーム22とその先端に取り付けられた一対の把持爪21をと具備するもので、別に設けた制御機器(図示しない)からの指令によって制御される。ロボットアーム22は、複数のアーム要素とそれらを接続する関節とからなり、前記把持爪21の位置(3自由度)と姿勢(3自由度)を、所定空間領域内で自在にコントロールすることができるものである。把持爪21は、特に図4に示すように、例えば概略くの字形をなすもので、一対の把持爪21が中央部分間の隙間が最も大きくなるように左右対称に配置されている。各把持爪21は、基端部において前記ロボットアーム22にスライド駆動可能に保持されており、前記制御機器からの指令で把持爪21間の距離を縮めるようにスライドさせることによって、各把持爪21の中央部分間で前記るつぼ81や後述する試料搬送用容器82、83の側周面を狭圧把持できるように構成してある。
【0018】
周辺機器としては、図1、図3に示すように、別装置から搬送されてくる試料を受け取る試料受取器6、受け取った試料を装置100内で搬送するための試料搬送用容器82、83、試料を秤量するための天秤5、使用前の複数のるつぼ81を載置するためのるつぼ載置テーブル3、エラー発生時に前記るつぼ81や試料搬送用容器82、83を載置しておくための退避テーブル9等が設けてある。
【0019】
試料受取器6は、ロート形状をなす受取器本体61と、受取器本体61の下方に設けた容器載置テーブル62とを具備したものである。受取器本体61は、上端に設けた大径の試料導入口61aから導入された試料が、試料より若干大きい内径を有する細管61bを通って下端の試料排出口から排出されるように構成してある。容器載置テーブル62は、矩形平板状をなすもので、その表面中央には、後述する試料搬送用容器83を嵌め置くための凹部62aが設けてある。
【0020】
試料搬送用容器82、83は、黒鉛るつぼ81と略同形状をなす上部が開口したもので、内部に試料を収容することができる。この実施形態では、試料搬送用容器として、試料の秤量用に用いるもの(以下、区別するときは秤量用容器82とも言う)と、別装置から導入されてきた試料を受け取るもの(以下、区別するときは受取用容器83とも言う)との2つを用いるようにしている。
【0021】
るつぼ載置テーブル3は、図5、図6に示すように、矩形平板状をなすものであり、表面には、るつぼ81の下端部を嵌め入れることのできる凹部31が、縦横マトリクス状に複数設けてある。また、このるつぼ載置テーブル3の一角には、光を利用した物体検知センサ7が設けてある。物体検知センサは7は、支持台71上に、互いに対向離間させて発光部72と受光部73とを設けたもので、発光部72から出た光が、受光部73で受光されるように構成してある。この実施形態では、発光部72を出て受光部73に到達する光の軌道が、るつぼ載置テーブル3の隅の1つの凹部31の直上を通過するように構成してあり、前記隅の凹部31にるつぼ81が載置されている場合は、受光部73が光を受光しないことから、るつぼ81の有無を検知できる。なお、物体検知センサは、上述した透光型のものに限られず、反射型のものでもよいし、超音波を利用したものや、機械式の接触センサなどを用いても構わない。これは、退避位置等に設けられたその他の物体検知センサでも同様である。
【0022】
退避テーブル9は、図1、図3に示すように、矩形平板状をなすものであり、その表面中央には、るつぼ81又は試料搬送用容器82、83を置くための凹部91が設けてある。この凹部位置が退避位置P2である。この退避位置P2には、前述同様、物体検知センサ(図示しない)が設けられている。
【0023】
天秤5は、試料の質量を精密に測定するためのものである。
【0024】
なお、本実施形態では、周辺機器として秤量用容器82を載置するための第2容器載置テーブル4をさらに設けている。この第2容器載置テーブル4は、前記容器載置テーブル62と略同一のものであるため、説明は省略する。
【0025】
次に、かかる構成の加熱型試料分析装置100の動作を、図7、図8のフローチャートを参照しながら説明する。
【0026】
まず初期状態では、るつぼ81はるつぼ載置テーブル3に、受取用容器83は容器載置テーブル62に、秤量用容器82は第2容器載置テーブル4にそれぞれ置かれており、退避テーブル9には、何も置かれていない。またロボット2は、何も把持しておらず、ロボットアームを所定の待機位置で停止させた待機状態(ステップS1)となっている。
【0027】
この初期状態から、オペレータからの入力や、別装置からのトリガー信号などの測定開始信号を受信すると(ステップS2)、加熱型試料分析装置100は、各部、つまり分析装置本体1、周辺機器、6軸ロボット2からの各状態信号を読み取って、エラー等がなく測定準備が完了しているかどうかを判断する(ステップS3)。準備が未完の場合は、ロボット2は動作せず、待機状態を維持する。
【0028】
一方、準備完了の場合には、ロボット2が動作し、秤量用容器82を第2容器載置テーブル4に取りに行く(ステップS4)。このとき、秤量用容器82の有無を判断し(ステップS5)、無い場合は前記待機状態となり、動作を停止する。なお、秤量用容器82の有無は、基本的には第2容器載置テーブル4に設けられた物体検知センサ(図示しないが、例えば前述の物体検知センサと原理は同じもの)の信号で判断するが、例えば、第2容器載置テーブル4がオペレータ等によって不測に移動した場合などでは、物体検知センサで秤量用容器82があると判断できても、位置が変わってしまってロボット2が把持できないため、把持爪21で秤量用容器82を挟みこもうとしたときに、把持爪21同士が接近しすぎたときを検知して、無いと判断する場合もある。
【0029】
次にロボット2は、秤量用容器82を把持して天秤5に搬送する(ステップS6)。次に天秤5に秤量用容器82を置けるか置けないかを判断し(ステップS7)、既に天秤5に容器やるつぼ81が置かれていることを検知した場合など、秤量用容器82を天秤5に置けない場合には、ロボット2は、秤量用容器82を退避テーブル9の凹部、すなわち退避位置P2に搬送して載置する(ステップS8)。そして待機状態となり、動作を停止する。
【0030】
一方、天秤5に置けた場合には、天秤5が、この空の秤量用容器82の重量を計測して記憶する(ステップS9)。
【0031】
次にロボット2は、受取用容器83を容器載置テーブル62に取りにいく(ステップS10)。このとき、受取用容器83の有無を判断し(ステップS11)、無い場合は前記待機状態となり、動作を停止する。有無の判断方式は秤量用容器82の場合と同じである。受取用容器83がある場合は、容器載置テーブル62に置かれている受取用容器83を把持して上方の試料導入位置、つまり受取用容器83の開口が試料受取器6における排出口の近傍直下となる位置にまで持ち上げる(ステップS12)。この状態で、試料が試料受取器6に導入され、受取用容器83に落下して収容される。ここで試料が導入されなかった場合には、ロボット2は、受取用容器83を容器載置テーブル62に戻し(ステップS13、14)、前記待機状態となって、動作を停止する。
【0032】
次にロボット2は、試料の入った受取用容器83を天秤5に搬送し(ステップS15)、そこで受取用容器83を傾けて天秤5上にある秤量用容器82に試料を入れ替える(ステップS16)。そして空になった受取用容器83は、容器載置テーブル62に戻す。
【0033】
天秤5では、試料の入った秤量用容器82の重量を計測し、先に計測した秤量用容器82の重量を差し引いて試料重量を算出する(ステップS17)。
【0034】
次にロボット2は、るつぼ載置テーブル3に並べられているるつぼ81のうちから、所定の1つを取りに行く(ステップS18)。各るつぼ81の載置場所(空間座標)と取りに行く順番は、ロボット2が予め記憶している。順番は、図6にカッコ書きで示すように、物体検知センサ7の設置されている隅部分が1番で、そこから横又は縦に1列ずつるつぼ81を取っていくように設定されている。これは、把持爪21が、水平方向からるつぼ81に接近してその側周面を把持することから、その把持爪21の移動軌跡上に、未だ取られていないるつぼ81が干渉することを防止するためである。このとき、るつぼ81がない場合には、後述する待機状態となり、動作を停止する。なお、るつぼ81の存在は、ロボット2が把持爪21で、るつぼ81を掴んだはずの場合に、把持爪21同士が接近しすぎたときを検知して、るつぼ81がないと判断する(ステップS19)。
【0035】
次にロボット2は、把持したるつぼ81を分析装置本体1に搬送し(ステップS20)、前記加熱位置P1に設置する(ステップS23)。このとき、既にるつぼ81が置かれている等の要因で、るつぼ81を加熱位置P1に設置できない場合、ロボット2は、るつぼ81を退避位置P2に置いて(ステップS21、S22)待機状態となり、動作を停止する。
【0036】
次にロボット2は、試料の入った秤量用容器82を天秤5から取り出して分析装置本体1まで搬送し、その試料投入口に秤量用容器82を傾けて試料を投入する(ステップS24)。そして、待機状態となり、動作を停止する。
【0037】
試料投入口から投入された試料は、加熱位置P1にあるるつぼ81に収容され、その後、分析装置本体1で、前述したように、加熱融解されて元素分析が行われる(ステップS25)。分析後は、るつぼ81、試料は破棄される(ステップS26)。
【0038】
しかして、この実施形態では、試料搬送用容器(受取用容器83又は秤量用容器82)に試料を入れて搬送中(試料搬送工程であり、ステップS15〜ステップS24がそれに相当する)に、停電など何らかの不測の不具合によるエラーが発生した場合には、ロボット2が、試料搬送用容器82、83を退避位置P2に置いて待機状態となり、動作を停止する(退避工程、フローチャートには図示されていない)。
【0039】
そして、再度、測定開始信号の受け付け待ち状態(ステップS2)となり、測定開始信号を受け付けた場合に、準備完了の確認をする(ステップS3)が、この確認の際、少なくとも前記退避位置P2に試料搬送用容器82、83又はるつぼ81が有るか無いかを検知し、有る場合には準備未完として、ロボット2は待機状態を維持し、動作を開始しない(チェック工程であり、ステップS3がそれに相当する)。
【0040】
しかしてこのような構成によれば、試料搬送途中になんらかのエラーが生じたとき、試料の入った試料搬送用容器82、83を、前記退避位置P2に載置するようにしており、またその退避位置P2に置かれた試料搬送用容器82、83を、例えばオペレータが取り除かない限り、ロボット2は動作しないようにしているので、エラーが生じたことをオペレータは確実に知ることができるうえ、希少な試料や代替のきかない試料が勝手に廃棄されてしまうことを確実に防止できる。
【0041】
さらに、エラーから復旧する場合、常に初期状態に戻るだけであり、その際に退避位置P2に置いた試料搬送用容器82、83が取り除かれたことを装置100が確認して初めて、初期状態からリスタートするだけであるから、復旧アルゴリズム(復旧プログラム)が非常に簡単なものとなる。物理構成の観点から言っても、退避位置P2の設定と、その退避位置P2に試料搬送用容器82、83が有るか無いかを検知する簡単な物体検知センサを付加するだけであるから、複雑化を招来しない。
【0042】
なお、本発明は上記実施形態に限られるものではない。
【0043】
例えば、助燃剤を投入して加熱するタイプで、専用の秤量用容器82がなく、セラミクス製のるつぼ81が秤量用容器82を兼ねている場合の動作フローを、図9、図10を参照しつつ、以下に簡単に例示する。なお、前記実施形態に対応する部材には、同一の符号を付している。
【0044】
まず初期状態では、るつぼ81はるつぼ載置テーブル3に、受取用容器83は容器載置テーブル62にそれぞれ置かれており、退避テーブル9には、何も置かれていない。またロボット2は、何も把持しておらず、ロボットアーム22を所定の待機位置で停止させた待機状態(ステップS101)となっている。なお、秤量用容器82が無いから、前記実施形態のような第2容器載置テーブル4は存在しない。
【0045】
この初期状態から所定の測定開始信号を受信すると(ステップS102)、加熱型試料分析装置100は、各部にエラー等がなく測定準備が完了しているかどうかを判断する(ステップS103)。準備が未完の場合は、ロボット2は動作せず、待機状態を維持する。
【0046】
一方、準備完了の場合には、ロボット2が動作し、前記実施形態同様、るつぼ載置テーブル3に並べられているるつぼ81のうちから、所定の1つを取りに行く(ステップS104)。このとき、るつぼ81がないと判断した場合には(ステップS105、後述する待機状態となり、動作を停止する。
【0047】
次にロボット2は、るつぼ81を把持して天秤5に搬送する(ステップS106)。そして、天秤5にるつぼ81を置けるか置けないかを判断し(ステップS107)、置けない場合には、ロボット2は、るつぼ81を退避テーブル9の凹部、すなわち退避位置P2に搬送して載置する(ステップS108)。そして待機状態となり、動作を停止する。
【0048】
一方、天秤5に置けた場合には、天秤5が、この空のるつぼ81の重量を計測して記憶する(ステップS109)。
【0049】
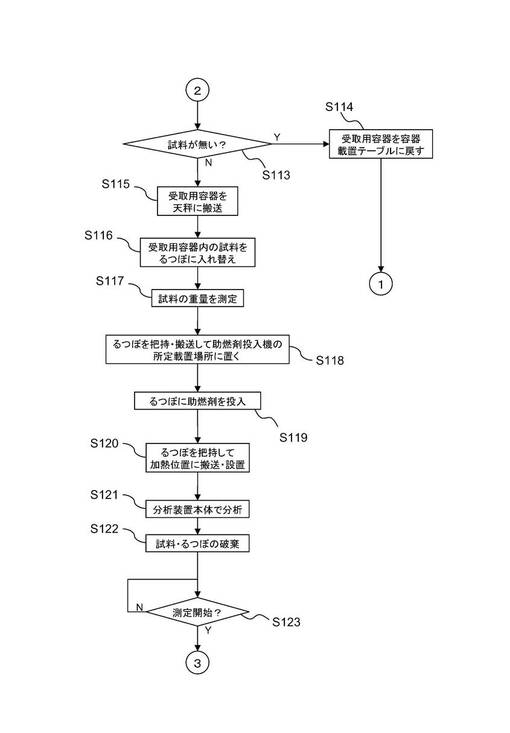
次にロボット2は、受取用容器83を容器載置テーブル62に取りにいく(ステップS110)。このとき、受取用容器83の有無を判断し(ステップS111)、無い場合は前記待機状態となり、動作を停止する。受取用容器83が有る場合は、容器載置テーブル62に置かれている受取用容器83を把持して上方の試料導入位置、つまり受取用容器83の開口が試料受取器6における排出口の近傍直下となる位置にまで持ち上げる(ステップS112)。この状態で、試料が試料受取器6に導入され、受取用容器83に落下して収容される。ここで試料が導入されなかった場合には、ロボット2は、受取用容器83を容器載置テーブル62に戻し(ステップS113、114)、前記待機状態となって、動作を停止する。
【0050】
次にロボット2は、試料の入った受取用容器83を天秤5に搬送し(ステップS115)、そこで受取用容器83を傾けて天秤5上にあるるつぼ81に試料を入れ替える(ステップS116)。そして空の受取用容器83を、容器載置テーブル62に戻す。
【0051】
天秤5では、試料の入ったるつぼ81の重量を計測し、先に計測したるつぼ81単体の重量を差し引いて試料重量を算出する(ステップS117)。
【0052】
次にロボット2は、天秤5から試料の入ったるつぼ81を把持搬送して、図示しない助燃剤投入機の所定載置場所に置く(ステップS118)。助燃剤投入機は、既知のもので、所定載置場所にるつぼ81が置かれると、これを検知して、当該るつぼ81に助燃剤を自動投入する装置である。
【0053】
助燃剤がるつぼ81に入れられると(ステップS119)、ロボット2は、そのるつぼ81を把持して、分析装置本体1の加熱位置P1に載置する(ステップS120)。
【0054】
その後、分析装置本体1で、試料が加熱融解されて元素分析が行われる(ステップS121)。分析が済んだ試料及びるつぼ81は、分析装置本体1が自動廃棄する(ステップS122)。
【0055】
しかして、この実施形態では、試料搬送用容器(受取用容器83)又はるつぼ81に試料を入れて搬送中(試料搬送工程であり、ステップS115〜ステップS120がそれに相当する)に、停電や、るつぼ81の加熱位置への設置ミス、助燃剤の投入ミスなど何らかの不測の不具合によるエラーが発生した場合には、ロボット2が、試料搬送用容器(受取用容器83)又はるつぼ81を退避位置P2に置いて待機状態となり、動作を停止する(退避工程、フローチャートには図示されていない)。
【0056】
そして、再度、測定開始信号の受け付け待ち状態(ステップS102)となり、測定開始信号を受け付けた場合に、準備完了の確認をする(ステップS103)が、この確認の際、少なくとも前記退避位置P2に試料搬送用容器(受取用容器83)又はるつぼ81が有るか無いかを検知し、有る場合には準備未完として、ロボット2は待機状態を維持し、動作を開始しない(チェック工程であり、ステップS103がそれに相当する)。
【0057】
その他、本発明は前記実施形態に限られるものではなく、その趣旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態に係る加熱型試料分析装置の全体斜視図。
【図2】同実施形態における加熱型試料分析装置の電極を示す部分正面図。
【図3】同実施形態における加熱型試料分析装置の全体平面図。
【図4】同実施形態におけるロボットの把持爪を示す部分平面図。
【図5】同実施形態におけるるつぼ載置テーブルを示す斜視図。
【図6】同実施形態におけるるつぼ載置テーブルを示す平面図。
【図7】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【図8】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【図9】本発明の他の実施形態に係る加熱型試料分析装置の動作を示すフローチャート。
【図10】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【符号の説明】
【0059】
100・・・加熱型試料分析装置
2・・・試料搬送機構(6軸ロボット)
21・・・把持爪
22・・・ロボットアーム
81・・・るつぼ
82、83・・・試料搬送用容器
P1・・・加熱位置
P2・・・退避位置
【技術分野】
【0001】
この発明は、金属などの試料を加熱融解することによって、試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置に関するものである。
【背景技術】
【0002】
この種の加熱型試料分析装置は、例えば特許文献1に示すように、上部電極及び下部電極に狭持された黒鉛るつぼに金属試料を収容して、電圧を印加することによって前記るつぼ内の測定試料を加熱融解し、それによって発生したガス成分を分析することにより、金属試料に元々含まれている酸素などの元素量を測定することができる。
【0003】
そして、このような分析装置を用いて試料を分析する場合には、当然のことながら、試料の計量や、るつぼへの試料投入、電極へのるつぼ載置など、主として試料搬送に係る種々の作業を所定手順にしたがって行う必要があり、従来は、一部を自動化した例はあるものの、一般的にはオペレータがこの作業を人手で行っている。
【特許文献1】特許2949501号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
一方、近時、例えば工場等での生産ラインにこの分析装置を組み込んで、インライン分析するといった理由から、前記作業の全自動化への要望があり、これに対応すべく、本発明者らは、6軸ロボットを利用して前記作業を全自動化したシステムを開発しつつある。
【0005】
ところで、ロボットを利用するなどして全自動化する場合には、停電などの不測のエラー発生時における復旧を考慮する必要がある。復旧させる最も単純な方法の一つとしては、エラー発生を検知した時点で作業を中止し、試料を廃棄して、初期状態に戻ればよい。
【0006】
しかしながら、試料の中には、希少なものや代替のきかないものがあり、試料を廃棄するのは好ましくない。かといって、試料廃棄を避けるために、復旧時には、エラー発生直前に戻って再開するようなシーケンスにすると、エラー発生時の各状況を記憶しておいて再現しなければならないうえ、あらゆるエラー発生タイミングやエラー種類を考慮しなければならなくなり、復旧アルゴリズムが極めて複雑になる恐れがある。
【0007】
本発明はかかる問題点を鑑みてなされたものであって、エラー発生時に、試料を廃棄することなく復旧が可能で、なおかつ、アルゴリズムや構造の複雑化を可及的に抑制できる加熱型試料分析装置を提供することをその主たる所期課題としている。
【課題を解決するための手段】
【0008】
すなわち本発明に係る加熱型試料分析装置は、るつぼに入れた試料を加熱融解することにより、当該試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置もので、所定導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置に置かれたるつぼに入れ替えるか、又は加熱位置外に置かれたるつぼに入れ替えてそのるつぼを加熱位置に搬送する試料搬送工程と、試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼを、前記導入位置とは別に設定した退避位置に搬送した後、待機状態となって動作を停止する退避工程と、前記退避位置に試料搬送用容器又はるつぼが有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構を具備していることを特徴とする。
【0009】
退避位置に試料搬送用容器又はるつぼが有るか無いかを検知するには、試料搬送機構側に、光を利用するなどした物体検知センサを設けてもよいが、より簡単には、前記退避位置側に、前記物体検知センサを設ければよい。
【0010】
前記試料搬送機構の具体的態様としては、ロボットアームとその先端に取り付けられた一対の把持爪を具備し、前記試料搬送用容器又はるつぼを、前記把持爪によって把持しながら搬送するものを挙げることができる。
【発明の効果】
【0011】
このように構成した本発明によれば、試料搬送途中にエラーが生じたとき、試料の入った試料搬送用容器を、前記退避位置に載置するようにしており、また、その退避位置に置かれた試料搬送用容器を例えばオペレータが取り除かない限り、試料搬送機構が動作しないようにしているので、エラーが生じたことをオペレータは確実に知ることができるうえ、試料が、装置側で勝手に廃棄されてしまうことを確実に防止できる。
【0012】
さらに、エラーから復旧する場合、常に初期状態に戻るだけであり、その際に退避位置に置いた試料搬送用容器が取り除かれたことを装置が確認して初めて、初期状態からリスタートするだけであるから、復旧アルゴリズム(復旧プログラム)が非常に簡単なものとなる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の一実施形態を図面を参照して説明する。
【0014】
図1に示す加熱型試料分析装置100は、金属試料(以下、単に試料とも言う)を加熱溶解し、その際に発生するガス成分を分析することによって、当該試料中に含まれている元素を測定するもので、試料搬送機構たる6軸ロボット2と、その周囲に配置された分析装置本体1、及び周辺機器とから構成されている。
【0015】
分析装置本体1から説明すると、この分析装置本体1の正面には、図1、図3に示すように、上部電極12及び下部電極11が上下に離間させて設けられており、下部電極11上に、試料を収容したるつぼ81を載置できるように構成してある。この図3に示するつぼ位置が加熱位置P1である。るつぼ81は、上部が開口した円筒状をなす黒鉛を素材としたもので、下端部は先細りのテーパー形状をなしている。分析時は、加熱位置P1に置かれたるつぼ81に対して、下部電極11が上方にスライドし、上部電極12との間でるつぼ81を挟み込む。この状態で、上部電極12の上方に設けられた図示しない試料投入口から、るつぼ81内に試料を投入されると、その後、電極11、12間に電流が印加され、黒鉛るつぼ81が発熱して内部の試料が加熱融解される。融解した試料から発生したガスは、図示しない分析部に送られて成分が測定され、その結果から、試料に元々含まれていた元素が分析される。例えば、試料中の酸素量を測定する場合には、試料の融解によって反応生成物であるCO(一酸化炭素)を発生させ、COを例えば分析部を構成する非分散形赤外線検出器を用いて測定し、そのCO値に基づいて当該試料中に存在していた酸素量を測定・算出する。その他、反応生成物とそれに応じた分析部を設定することにより、水素や硫黄、窒素などの成分も測定することができる。なお、分析後は、使用したるつぼ81は、試料と共に廃棄処分される。
【0016】
次に6軸ロボット2及び周辺機器について説明する。
【0017】
6軸ロボット2は、図1、図3に示すように、ロボットアーム22とその先端に取り付けられた一対の把持爪21をと具備するもので、別に設けた制御機器(図示しない)からの指令によって制御される。ロボットアーム22は、複数のアーム要素とそれらを接続する関節とからなり、前記把持爪21の位置(3自由度)と姿勢(3自由度)を、所定空間領域内で自在にコントロールすることができるものである。把持爪21は、特に図4に示すように、例えば概略くの字形をなすもので、一対の把持爪21が中央部分間の隙間が最も大きくなるように左右対称に配置されている。各把持爪21は、基端部において前記ロボットアーム22にスライド駆動可能に保持されており、前記制御機器からの指令で把持爪21間の距離を縮めるようにスライドさせることによって、各把持爪21の中央部分間で前記るつぼ81や後述する試料搬送用容器82、83の側周面を狭圧把持できるように構成してある。
【0018】
周辺機器としては、図1、図3に示すように、別装置から搬送されてくる試料を受け取る試料受取器6、受け取った試料を装置100内で搬送するための試料搬送用容器82、83、試料を秤量するための天秤5、使用前の複数のるつぼ81を載置するためのるつぼ載置テーブル3、エラー発生時に前記るつぼ81や試料搬送用容器82、83を載置しておくための退避テーブル9等が設けてある。
【0019】
試料受取器6は、ロート形状をなす受取器本体61と、受取器本体61の下方に設けた容器載置テーブル62とを具備したものである。受取器本体61は、上端に設けた大径の試料導入口61aから導入された試料が、試料より若干大きい内径を有する細管61bを通って下端の試料排出口から排出されるように構成してある。容器載置テーブル62は、矩形平板状をなすもので、その表面中央には、後述する試料搬送用容器83を嵌め置くための凹部62aが設けてある。
【0020】
試料搬送用容器82、83は、黒鉛るつぼ81と略同形状をなす上部が開口したもので、内部に試料を収容することができる。この実施形態では、試料搬送用容器として、試料の秤量用に用いるもの(以下、区別するときは秤量用容器82とも言う)と、別装置から導入されてきた試料を受け取るもの(以下、区別するときは受取用容器83とも言う)との2つを用いるようにしている。
【0021】
るつぼ載置テーブル3は、図5、図6に示すように、矩形平板状をなすものであり、表面には、るつぼ81の下端部を嵌め入れることのできる凹部31が、縦横マトリクス状に複数設けてある。また、このるつぼ載置テーブル3の一角には、光を利用した物体検知センサ7が設けてある。物体検知センサは7は、支持台71上に、互いに対向離間させて発光部72と受光部73とを設けたもので、発光部72から出た光が、受光部73で受光されるように構成してある。この実施形態では、発光部72を出て受光部73に到達する光の軌道が、るつぼ載置テーブル3の隅の1つの凹部31の直上を通過するように構成してあり、前記隅の凹部31にるつぼ81が載置されている場合は、受光部73が光を受光しないことから、るつぼ81の有無を検知できる。なお、物体検知センサは、上述した透光型のものに限られず、反射型のものでもよいし、超音波を利用したものや、機械式の接触センサなどを用いても構わない。これは、退避位置等に設けられたその他の物体検知センサでも同様である。
【0022】
退避テーブル9は、図1、図3に示すように、矩形平板状をなすものであり、その表面中央には、るつぼ81又は試料搬送用容器82、83を置くための凹部91が設けてある。この凹部位置が退避位置P2である。この退避位置P2には、前述同様、物体検知センサ(図示しない)が設けられている。
【0023】
天秤5は、試料の質量を精密に測定するためのものである。
【0024】
なお、本実施形態では、周辺機器として秤量用容器82を載置するための第2容器載置テーブル4をさらに設けている。この第2容器載置テーブル4は、前記容器載置テーブル62と略同一のものであるため、説明は省略する。
【0025】
次に、かかる構成の加熱型試料分析装置100の動作を、図7、図8のフローチャートを参照しながら説明する。
【0026】
まず初期状態では、るつぼ81はるつぼ載置テーブル3に、受取用容器83は容器載置テーブル62に、秤量用容器82は第2容器載置テーブル4にそれぞれ置かれており、退避テーブル9には、何も置かれていない。またロボット2は、何も把持しておらず、ロボットアームを所定の待機位置で停止させた待機状態(ステップS1)となっている。
【0027】
この初期状態から、オペレータからの入力や、別装置からのトリガー信号などの測定開始信号を受信すると(ステップS2)、加熱型試料分析装置100は、各部、つまり分析装置本体1、周辺機器、6軸ロボット2からの各状態信号を読み取って、エラー等がなく測定準備が完了しているかどうかを判断する(ステップS3)。準備が未完の場合は、ロボット2は動作せず、待機状態を維持する。
【0028】
一方、準備完了の場合には、ロボット2が動作し、秤量用容器82を第2容器載置テーブル4に取りに行く(ステップS4)。このとき、秤量用容器82の有無を判断し(ステップS5)、無い場合は前記待機状態となり、動作を停止する。なお、秤量用容器82の有無は、基本的には第2容器載置テーブル4に設けられた物体検知センサ(図示しないが、例えば前述の物体検知センサと原理は同じもの)の信号で判断するが、例えば、第2容器載置テーブル4がオペレータ等によって不測に移動した場合などでは、物体検知センサで秤量用容器82があると判断できても、位置が変わってしまってロボット2が把持できないため、把持爪21で秤量用容器82を挟みこもうとしたときに、把持爪21同士が接近しすぎたときを検知して、無いと判断する場合もある。
【0029】
次にロボット2は、秤量用容器82を把持して天秤5に搬送する(ステップS6)。次に天秤5に秤量用容器82を置けるか置けないかを判断し(ステップS7)、既に天秤5に容器やるつぼ81が置かれていることを検知した場合など、秤量用容器82を天秤5に置けない場合には、ロボット2は、秤量用容器82を退避テーブル9の凹部、すなわち退避位置P2に搬送して載置する(ステップS8)。そして待機状態となり、動作を停止する。
【0030】
一方、天秤5に置けた場合には、天秤5が、この空の秤量用容器82の重量を計測して記憶する(ステップS9)。
【0031】
次にロボット2は、受取用容器83を容器載置テーブル62に取りにいく(ステップS10)。このとき、受取用容器83の有無を判断し(ステップS11)、無い場合は前記待機状態となり、動作を停止する。有無の判断方式は秤量用容器82の場合と同じである。受取用容器83がある場合は、容器載置テーブル62に置かれている受取用容器83を把持して上方の試料導入位置、つまり受取用容器83の開口が試料受取器6における排出口の近傍直下となる位置にまで持ち上げる(ステップS12)。この状態で、試料が試料受取器6に導入され、受取用容器83に落下して収容される。ここで試料が導入されなかった場合には、ロボット2は、受取用容器83を容器載置テーブル62に戻し(ステップS13、14)、前記待機状態となって、動作を停止する。
【0032】
次にロボット2は、試料の入った受取用容器83を天秤5に搬送し(ステップS15)、そこで受取用容器83を傾けて天秤5上にある秤量用容器82に試料を入れ替える(ステップS16)。そして空になった受取用容器83は、容器載置テーブル62に戻す。
【0033】
天秤5では、試料の入った秤量用容器82の重量を計測し、先に計測した秤量用容器82の重量を差し引いて試料重量を算出する(ステップS17)。
【0034】
次にロボット2は、るつぼ載置テーブル3に並べられているるつぼ81のうちから、所定の1つを取りに行く(ステップS18)。各るつぼ81の載置場所(空間座標)と取りに行く順番は、ロボット2が予め記憶している。順番は、図6にカッコ書きで示すように、物体検知センサ7の設置されている隅部分が1番で、そこから横又は縦に1列ずつるつぼ81を取っていくように設定されている。これは、把持爪21が、水平方向からるつぼ81に接近してその側周面を把持することから、その把持爪21の移動軌跡上に、未だ取られていないるつぼ81が干渉することを防止するためである。このとき、るつぼ81がない場合には、後述する待機状態となり、動作を停止する。なお、るつぼ81の存在は、ロボット2が把持爪21で、るつぼ81を掴んだはずの場合に、把持爪21同士が接近しすぎたときを検知して、るつぼ81がないと判断する(ステップS19)。
【0035】
次にロボット2は、把持したるつぼ81を分析装置本体1に搬送し(ステップS20)、前記加熱位置P1に設置する(ステップS23)。このとき、既にるつぼ81が置かれている等の要因で、るつぼ81を加熱位置P1に設置できない場合、ロボット2は、るつぼ81を退避位置P2に置いて(ステップS21、S22)待機状態となり、動作を停止する。
【0036】
次にロボット2は、試料の入った秤量用容器82を天秤5から取り出して分析装置本体1まで搬送し、その試料投入口に秤量用容器82を傾けて試料を投入する(ステップS24)。そして、待機状態となり、動作を停止する。
【0037】
試料投入口から投入された試料は、加熱位置P1にあるるつぼ81に収容され、その後、分析装置本体1で、前述したように、加熱融解されて元素分析が行われる(ステップS25)。分析後は、るつぼ81、試料は破棄される(ステップS26)。
【0038】
しかして、この実施形態では、試料搬送用容器(受取用容器83又は秤量用容器82)に試料を入れて搬送中(試料搬送工程であり、ステップS15〜ステップS24がそれに相当する)に、停電など何らかの不測の不具合によるエラーが発生した場合には、ロボット2が、試料搬送用容器82、83を退避位置P2に置いて待機状態となり、動作を停止する(退避工程、フローチャートには図示されていない)。
【0039】
そして、再度、測定開始信号の受け付け待ち状態(ステップS2)となり、測定開始信号を受け付けた場合に、準備完了の確認をする(ステップS3)が、この確認の際、少なくとも前記退避位置P2に試料搬送用容器82、83又はるつぼ81が有るか無いかを検知し、有る場合には準備未完として、ロボット2は待機状態を維持し、動作を開始しない(チェック工程であり、ステップS3がそれに相当する)。
【0040】
しかしてこのような構成によれば、試料搬送途中になんらかのエラーが生じたとき、試料の入った試料搬送用容器82、83を、前記退避位置P2に載置するようにしており、またその退避位置P2に置かれた試料搬送用容器82、83を、例えばオペレータが取り除かない限り、ロボット2は動作しないようにしているので、エラーが生じたことをオペレータは確実に知ることができるうえ、希少な試料や代替のきかない試料が勝手に廃棄されてしまうことを確実に防止できる。
【0041】
さらに、エラーから復旧する場合、常に初期状態に戻るだけであり、その際に退避位置P2に置いた試料搬送用容器82、83が取り除かれたことを装置100が確認して初めて、初期状態からリスタートするだけであるから、復旧アルゴリズム(復旧プログラム)が非常に簡単なものとなる。物理構成の観点から言っても、退避位置P2の設定と、その退避位置P2に試料搬送用容器82、83が有るか無いかを検知する簡単な物体検知センサを付加するだけであるから、複雑化を招来しない。
【0042】
なお、本発明は上記実施形態に限られるものではない。
【0043】
例えば、助燃剤を投入して加熱するタイプで、専用の秤量用容器82がなく、セラミクス製のるつぼ81が秤量用容器82を兼ねている場合の動作フローを、図9、図10を参照しつつ、以下に簡単に例示する。なお、前記実施形態に対応する部材には、同一の符号を付している。
【0044】
まず初期状態では、るつぼ81はるつぼ載置テーブル3に、受取用容器83は容器載置テーブル62にそれぞれ置かれており、退避テーブル9には、何も置かれていない。またロボット2は、何も把持しておらず、ロボットアーム22を所定の待機位置で停止させた待機状態(ステップS101)となっている。なお、秤量用容器82が無いから、前記実施形態のような第2容器載置テーブル4は存在しない。
【0045】
この初期状態から所定の測定開始信号を受信すると(ステップS102)、加熱型試料分析装置100は、各部にエラー等がなく測定準備が完了しているかどうかを判断する(ステップS103)。準備が未完の場合は、ロボット2は動作せず、待機状態を維持する。
【0046】
一方、準備完了の場合には、ロボット2が動作し、前記実施形態同様、るつぼ載置テーブル3に並べられているるつぼ81のうちから、所定の1つを取りに行く(ステップS104)。このとき、るつぼ81がないと判断した場合には(ステップS105、後述する待機状態となり、動作を停止する。
【0047】
次にロボット2は、るつぼ81を把持して天秤5に搬送する(ステップS106)。そして、天秤5にるつぼ81を置けるか置けないかを判断し(ステップS107)、置けない場合には、ロボット2は、るつぼ81を退避テーブル9の凹部、すなわち退避位置P2に搬送して載置する(ステップS108)。そして待機状態となり、動作を停止する。
【0048】
一方、天秤5に置けた場合には、天秤5が、この空のるつぼ81の重量を計測して記憶する(ステップS109)。
【0049】
次にロボット2は、受取用容器83を容器載置テーブル62に取りにいく(ステップS110)。このとき、受取用容器83の有無を判断し(ステップS111)、無い場合は前記待機状態となり、動作を停止する。受取用容器83が有る場合は、容器載置テーブル62に置かれている受取用容器83を把持して上方の試料導入位置、つまり受取用容器83の開口が試料受取器6における排出口の近傍直下となる位置にまで持ち上げる(ステップS112)。この状態で、試料が試料受取器6に導入され、受取用容器83に落下して収容される。ここで試料が導入されなかった場合には、ロボット2は、受取用容器83を容器載置テーブル62に戻し(ステップS113、114)、前記待機状態となって、動作を停止する。
【0050】
次にロボット2は、試料の入った受取用容器83を天秤5に搬送し(ステップS115)、そこで受取用容器83を傾けて天秤5上にあるるつぼ81に試料を入れ替える(ステップS116)。そして空の受取用容器83を、容器載置テーブル62に戻す。
【0051】
天秤5では、試料の入ったるつぼ81の重量を計測し、先に計測したるつぼ81単体の重量を差し引いて試料重量を算出する(ステップS117)。
【0052】
次にロボット2は、天秤5から試料の入ったるつぼ81を把持搬送して、図示しない助燃剤投入機の所定載置場所に置く(ステップS118)。助燃剤投入機は、既知のもので、所定載置場所にるつぼ81が置かれると、これを検知して、当該るつぼ81に助燃剤を自動投入する装置である。
【0053】
助燃剤がるつぼ81に入れられると(ステップS119)、ロボット2は、そのるつぼ81を把持して、分析装置本体1の加熱位置P1に載置する(ステップS120)。
【0054】
その後、分析装置本体1で、試料が加熱融解されて元素分析が行われる(ステップS121)。分析が済んだ試料及びるつぼ81は、分析装置本体1が自動廃棄する(ステップS122)。
【0055】
しかして、この実施形態では、試料搬送用容器(受取用容器83)又はるつぼ81に試料を入れて搬送中(試料搬送工程であり、ステップS115〜ステップS120がそれに相当する)に、停電や、るつぼ81の加熱位置への設置ミス、助燃剤の投入ミスなど何らかの不測の不具合によるエラーが発生した場合には、ロボット2が、試料搬送用容器(受取用容器83)又はるつぼ81を退避位置P2に置いて待機状態となり、動作を停止する(退避工程、フローチャートには図示されていない)。
【0056】
そして、再度、測定開始信号の受け付け待ち状態(ステップS102)となり、測定開始信号を受け付けた場合に、準備完了の確認をする(ステップS103)が、この確認の際、少なくとも前記退避位置P2に試料搬送用容器(受取用容器83)又はるつぼ81が有るか無いかを検知し、有る場合には準備未完として、ロボット2は待機状態を維持し、動作を開始しない(チェック工程であり、ステップS103がそれに相当する)。
【0057】
その他、本発明は前記実施形態に限られるものではなく、その趣旨を逸脱しない範囲で種々の変形が可能であることは言うまでもない。
【図面の簡単な説明】
【0058】
【図1】本発明の一実施形態に係る加熱型試料分析装置の全体斜視図。
【図2】同実施形態における加熱型試料分析装置の電極を示す部分正面図。
【図3】同実施形態における加熱型試料分析装置の全体平面図。
【図4】同実施形態におけるロボットの把持爪を示す部分平面図。
【図5】同実施形態におけるるつぼ載置テーブルを示す斜視図。
【図6】同実施形態におけるるつぼ載置テーブルを示す平面図。
【図7】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【図8】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【図9】本発明の他の実施形態に係る加熱型試料分析装置の動作を示すフローチャート。
【図10】同実施形態における加熱型試料分析装置の動作を示すフローチャート。
【符号の説明】
【0059】
100・・・加熱型試料分析装置
2・・・試料搬送機構(6軸ロボット)
21・・・把持爪
22・・・ロボットアーム
81・・・るつぼ
82、83・・・試料搬送用容器
P1・・・加熱位置
P2・・・退避位置
【特許請求の範囲】
【請求項1】
るつぼに入れた試料を加熱融解することにより、当該試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置であって、
所定導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置に置かれたるつぼに入れ替えるか、又は加熱位置外に置かれたるつぼに入れ替えてそのるつぼを加熱位置に搬送する試料搬送工程と、
試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼを、前記導入位置とは別に設定した退避位置に搬送した後、待機状態となって動作を停止する退避工程と、
前記退避位置に試料搬送用容器又はるつぼが有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構を具備していることを特徴とする加熱型試料分析装置。
【請求項2】
前記退避位置側に設置され、該退避位置に試料搬送用容器又はるつぼが有るか無いかを検知する物体検知センサをさらに具備している加熱型試料分析装置。
【請求項3】
前記試料搬送機構が、ロボットアームとその先端に取り付けられた一対の把持爪を具備し、前記試料搬送用容器又はるつぼを、前記把持爪によって把持しながら搬送するものである請求項1又は2記載の加熱型試料分析装置。
【請求項4】
前記試料が金属である請求項1、2又は3記載の加熱型試料分析装置。
【請求項1】
るつぼに入れた試料を加熱融解することにより、当該試料内部に含まれている元素をガス成分として抽出し、分析する加熱型試料分析装置であって、
所定導入位置で試料が投入された試料搬送用容器を搬送し、その内部の試料を加熱位置に置かれたるつぼに入れ替えるか、又は加熱位置外に置かれたるつぼに入れ替えてそのるつぼを加熱位置に搬送する試料搬送工程と、
試料搬送中にエラーが生じたときには、試料の入った前記試料搬送用容器又はるつぼを、前記導入位置とは別に設定した退避位置に搬送した後、待機状態となって動作を停止する退避工程と、
前記退避位置に試料搬送用容器又はるつぼが有るか無いかを検知し、有る場合には前記待機状態を維持するチェック工程と、を行う試料搬送機構を具備していることを特徴とする加熱型試料分析装置。
【請求項2】
前記退避位置側に設置され、該退避位置に試料搬送用容器又はるつぼが有るか無いかを検知する物体検知センサをさらに具備している加熱型試料分析装置。
【請求項3】
前記試料搬送機構が、ロボットアームとその先端に取り付けられた一対の把持爪を具備し、前記試料搬送用容器又はるつぼを、前記把持爪によって把持しながら搬送するものである請求項1又は2記載の加熱型試料分析装置。
【請求項4】
前記試料が金属である請求項1、2又は3記載の加熱型試料分析装置。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】

【図7】

【図8】

【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−198405(P2009−198405A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−42265(P2008−42265)
【出願日】平成20年2月23日(2008.2.23)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月23日(2008.2.23)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
[ Back to top ]