
加熱調理器
【課題】マイクロ波で食品加熱を行う加熱調理器において、無負荷運転を早期に検知し排除することができ、そのためのコストも安くて済む加熱調理器を提供する。
【解決手段】加熱調理器1は、加熱室10と、加熱室10内の食品を加熱するマイクロ波を発生するマグネトロン25と、加熱室20内の蒸気の有無を判定する蒸気センサー28と、全体制御を行う制御部30を備える。制御部30は、マイクロ波による加熱開始後、蒸気センサー28の検知ピーク値が指定下限値を超えたかどうかを監視し、超えたらその時間T1を記録し、次いで、T1からの経過時間が指定時間を超えたかどうかをチェックし、超えていなければ蒸気センサー28の検知ピーク値が指定上限値を超えたかどうかを監視し、T1からの経過時間が指定時間を超える前に、蒸気センサー28の検知ピーク値が指定上限値を超えたときは、加熱室20内に負荷ありと判断し、通常運転に移行する。
【解決手段】加熱調理器1は、加熱室10と、加熱室10内の食品を加熱するマイクロ波を発生するマグネトロン25と、加熱室20内の蒸気の有無を判定する蒸気センサー28と、全体制御を行う制御部30を備える。制御部30は、マイクロ波による加熱開始後、蒸気センサー28の検知ピーク値が指定下限値を超えたかどうかを監視し、超えたらその時間T1を記録し、次いで、T1からの経過時間が指定時間を超えたかどうかをチェックし、超えていなければ蒸気センサー28の検知ピーク値が指定上限値を超えたかどうかを監視し、T1からの経過時間が指定時間を超える前に、蒸気センサー28の検知ピーク値が指定上限値を超えたときは、加熱室20内に負荷ありと判断し、通常運転に移行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はマイクロ波で食品加熱を行う加熱調理器に関する。
【背景技術】
【0002】
マイクロ波で食品を加熱する加熱調理器は、一般的には「電子レンジ」と呼称され、家庭の必需品となっている。この種の加熱調理器では、加熱室内に食品や飲料などの被加熱物(負荷)がない状態、すなわち無負荷状態で加熱を行うことは避けるべきこととされている。というのは、無負荷状態でマイクロ波加熱を行うと、消費されないマイクロ波が大量にマグネトロンに帰還してマグネトロンの温度が上昇し、マグネトロンの劣化や破損を招くからである。また、加熱室内に置かれた物品、例えば食品載置用のトレイの一部にマイクロ波が集中し、その部分が温度上昇で破損したり、加熱室内の合成樹脂製部品が溶融したりするなどの事態も発生する。
【0003】
上述のような無負荷運転を防止するため、これまでにも種々の対策が実施されている。例えば、加熱室内の温度変化を赤外線センサーで監視し、異常な温度上昇があればマグネトロンを停止させるといったことが行われている。特許文献1に記載された加熱調理器では、サーミスタによる検出温度と湿度センサーによる検出湿度に基づいて被加熱物の有無を判断し、加熱室内に被加熱物がないと判断したときはマイクロ波加熱を停止している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−241128号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
加熱室内の温度変化を赤外線センサーで監視する方式には、赤外線センサーが温度上昇を検知するまでにタイムラグがあることから、マグネトロンが停止するまでの間に庫内の物品が高温になることがある。例えば加熱室底面を構成するセラミックガラスが高温になってしまった場合、うっかりそれに触れると火傷する恐れもある。
【0006】
特許文献1記載の加熱調理器のようにサーミスタによる検出温度と湿度センサーによる検出湿度に基づいて被加熱物の有無を判断するものでは、サーミスタと湿度センサーという2種類の検出部品が必要であり、コスト高になるという問題がある。
【0007】
本発明は上記の点に鑑みなされたものであり、マイクロ波で食品加熱を行う加熱調理器において、無負荷運転を早期に検知し排除することができ、そのためのコストも安くて済む加熱調理器を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の好ましい実施形態によれば、加熱調理器は、加熱室と、前記加熱室内の食品を加熱するマイクロ波を発生するマグネトロンと、温度の揺らぎから前記加熱室内の蒸気の有無を判定する蒸気センサーと、全体制御を行う制御部を備え、前記蒸気センサーは、蒸気センサー周辺の温度の揺らぎを検知して、温度揺らぎの大きさに応じた検知ピーク値を出力し、前記制御部は、マイクロ波による加熱開始後、次の制御ステップを遂行する。
(a)前記蒸気センサーの検知ピーク値が指定下限値を超えたかどうかを監視するステップ
(b)前記蒸気センサーの検知ピーク値が指定下限値を超えた時間T1を記録するステップ
(c)T1からの経過時間が指定時間を超えたかどうかを監視し、超えていなければ前記蒸気センサーの検知ピーク値が指定上限値を超えたかどうかを監視するステップ
(d)T1からの経過時間が指定時間を超える前に、前記蒸気センサーの検知ピーク値が指定上限値を超えたとき、加熱室内に負荷ありと判断し、通常運転に移行するステップ
(e)前記蒸気センサーの検知ピーク値が指定上限値を超える前に、T1からの経過時間が指定時間を超えたとき、加熱室内に負荷なしと判断し、前記マグネトロンの出力を低下または停止させるステップ。
【0009】
本発明の好ましい実施形態によれば、上記構成の加熱調理器において、前記蒸気センサーは、前記加熱室の外で、当該加熱室からの排気にさらされる位置に配置される。
【発明の効果】
【0010】
蒸気センサーの検知レベルは蒸気を検知すると短時間のうちに上昇する。このため、
加熱室内の負荷の有無を早期に判定できる。また、蒸気センサーは比較的安価な部品であるため、大幅なコストアップを招かない。
【図面の簡単な説明】
【0011】
【図1】加熱調理器の正面図である。
【図2】加熱調理器の概略構成を示す断面図である。
【図3】加熱調理器のブロック構成図である。
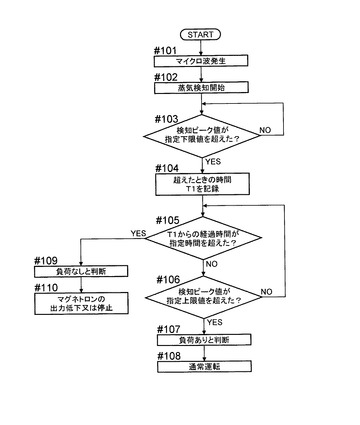
【図4】負荷の有無判断のフローチャートである。
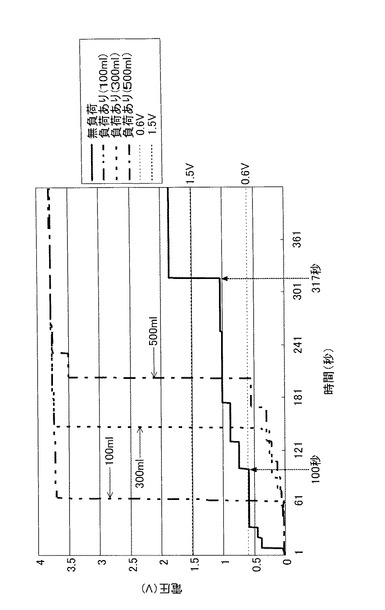
【図5】蒸気センサーによる検知の実例を示すグラフである。
【発明を実施するための形態】
【0012】
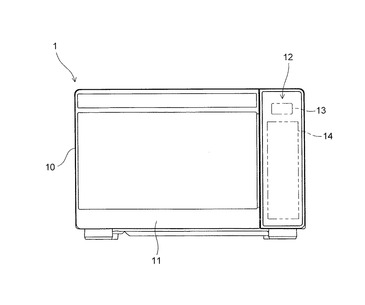
以下、図に基づき本発明の実施形態である加熱調理器1の構造を説明する。図1において、紙面の上下は加熱調理器1の上下に一致する。また紙面左側が加熱調理器1の左側、紙面右側が加熱調理器1の右側であるものとする。
【0013】
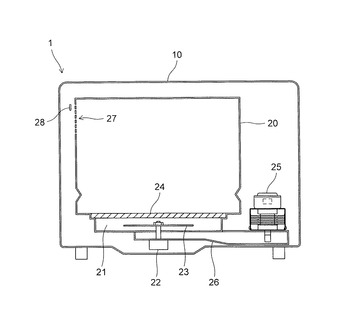
加熱調理器1は直方体形状の板金製構造体からなるキャビネット10を備える。キャビネット10の内部には一回り小さな直方体形状の板金製構造体からなる加熱室20が設けられる。加熱室20はキャビネット10の正面側が開口部となっている。キャビネット10の正面には加熱室20の開口部を開閉する板金製の扉11が設けられる。扉11は左端を支点として開閉する。
【0014】
キャビネット10には、扉11の右側の部分に操作部12が形成される。操作部12の上部には液晶パネルからなる表示部13が配置され、その下方には複数の操作キーを備えたキー入力部14が配置される。
【0015】
加熱室20の底部の下には電波攪拌室21が形成され、その中にはモータ22によって回転する電波攪拌羽根23が配置される。加熱室20と電波攪拌室21の境界をなす開口部にはセラミックガラス24がはめ込まれる。電波攪拌室21には、マグネトロン25が発生するマイクロ波が導波管26を通じて供給される。
【0016】
加熱室20の側壁上方には多数の小孔からなる排気口27が形成される。加熱室20の外側には、排気口27から排出される排気にさらされる位置に蒸気センサー28が配置される。この位置に蒸気センサー28を配置することにより、食品から油はねが発生したり、食品が破裂して食品の破片が飛び散ったりしても、それらから蒸気センサー28を保護することができる。
【0017】
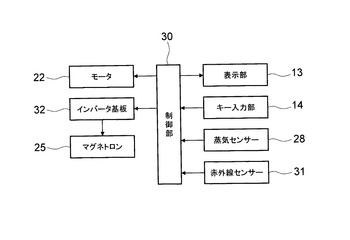
加熱調理器1の制御システムは図3に示す構成となっている。加熱調理器1全体の制御を行う制御部30はマイクロコンピュータを中核として構成され、様々な構成要素から出力信号を受け取り、また様々な構成要素に対し制御信号を出力する。
【0018】
制御部30に信号を出力する構成要素には、キー入力部14と蒸気センサー28に加えて、加熱室20内の食品の温度を監視する赤外線センサー31が含まれる。
【0019】
制御部30から制御信号を受けて動作を行う構成要素には、モータ22に加えて、マグネトロン25を発振させるインバータ基板32が含まれる。
【0020】
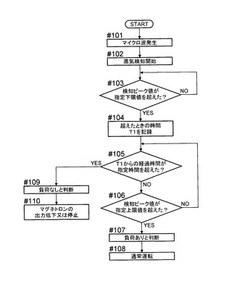
続いて加熱調理器1の動作を説明する。まず扉11を開け、加熱室20の中に被加熱物である食品を入れる。そして扉11を閉じ、キー入力部14を通じ加熱条件を入力して加熱を開始する。ここから図4のフローが始まる。
【0021】
ステップ#101では制御部30がインバータ基板32に指令を出してマグネトロン25を発振させる。マグネトロン25はマイクロ波を発生し、マイクロ波は導波管26を通じて電波攪拌室21に入る。電波攪拌室21に入ったマイクロ波は電波攪拌羽根23で攪拌され、セラミックガラス24を通過して加熱室20に入る。そして加熱室20に入れられた食品の分子を振動させ、食品を内部から発熱させる。
【0022】
ステップ#102では蒸気センサー28による蒸気の検知を開始する。蒸気センサー28は、サーミスタとオペアンプとで構成される。通常、サーミスタは、温度によって電気抵抗値が変化することを利用して温度を測定する温度センサーとして用いられるものであり、サーミスタ周辺の温度に応じた電圧を出力する。この時、サーミスタ周辺に蒸気が発生していると、サーミスタの表面に蒸気が結露しては気化することを繰り返すため、サーミスタの温度が小刻みに変化する。このサーミスタの温度変化による出力の揺らぎを利用して、蒸気の有無を判定するセンサーが蒸気センサー28であり、オペアンプを介して、サーミスタの出力から揺らぎ成分を抽出及び増幅して出力するようになっている。
【0023】
この構成により蒸気センサー28は、排気口27から排出される排気の中に蒸気が含まれていると、サーミスタの出力の揺らぎを検知し、揺らぎの大きさに応じた電圧を制御部
30に出力する。
【0024】
尚、蒸気センサー28は、サーミスタの出力の揺らぎから蒸気の有無を判定するタイプのものであればよく、上記通りの構成でなくても良い。
【0025】
ここで、蒸気センサー28による蒸気の有無の判定について、図5に基づき説明する。図5の縦軸は蒸気センサー28が制御部30に出力する電圧である。制御部30は所定のサンプリングレートで蒸気センサー28が出力する電圧を読み込み、それを平滑化して、図5に示す段階状のピーク値として処理する。
【0026】
図5は実験結果のグラフであり、次の4通りのパターンで加熱室20の加熱を行った場合における蒸気センサー28の検知ピーク値の変遷を示している。4通りのパターンとは、負荷として100mlの水を入れた場合、同じく負荷として300mlの水を入れた場合、同じく負荷として500mlの水を入れた場合、及び無負荷の場合である。
【0027】
負荷として水100mlを入れた場合は加熱開始後60秒を過ぎたあたりで、負荷として水300mlを入れた場合は加熱開始後120秒をまわってから、負荷として水500mlを入れた場合は加熱開始後180秒をまわってから、ピーク値が一気にはね上がる。
このように、蒸気センサー28には蒸気を検知すると検知レベルが短時間のうちに上昇するという特性がある。食品等の被加熱物には水分が含まれているため、被加熱物を入れて加熱を開始する場合も、負荷として水を入れた図5の実験例と同様の特性を示す。
【0028】
前述の通り、蒸気センサー28は、本来、蒸気の有無を判定するためのセンサーであり、蒸気が存在する場合に特定パターンの出力を生じることを期待されているが、本発明者らが実験を行った結果、無負荷で加熱を開始した場合も蒸気センサー28は出力を示し、それは負荷が存在する場合とは全く異なった出力であることが判明した。すなわち、図5に示すように、無負荷で加熱を開始した場合、蒸気センサー28は蒸気を検知した場合の検知レベルよりも低い検知ピーク値を示し、時間経過に伴いその検知ピーク値が徐々に上昇して行くという特性を示す。図4のフローはこの特性を利用して組み立てられている。
【0029】
ステップ#103では、蒸気センサー28の検知ピーク値が指定下限値を上方に超えたかどうかをチェックする。指定下限値は、図5では、例えば0.6Vに設定することができる。指定下限値を超えたらステップ#104に進み、超えたときの時間(加熱開始からの経過時間)T1を記録する。それからステップ#105に進む。
【0030】
ステップ#105では、T1からの経過時間が指定時間を超えたかどうかをチェックする。超えていない場合はステップ#106に進む。
【0031】
ステップ#106では、蒸気センサー28の検知ピーク値が指定上限値を超えたかどうかをチェックする。指定上限値は、図5では、例えば1.5Vに設定することができる。指定上限値を超えたらステップ#107に進み、超えない場合はステップ#105に戻る。
【0032】
ステップ#107に進んだということは、T1からの経過時間が指定時間に至る前に蒸気センサー28の検知ピーク値が指定上限値を突破したということであり、ここで制御部30は、加熱室20の中に負荷が存在すると判断する。図5では、負荷が100ml、300ml、500mlのいずれの場合においても、指定下限値である0.6Vを超えてから短時間のうちに指定上限値である1.5Vを超えている。従って、ステップ#105における「指定時間」には、例えば「10秒」などの比較的短い時間を設定することができる。
【0033】
ステップ#107からステップ#108に進む。ステップ#108では、無負荷運転の懸念がなくなったことから、制御部30は加熱調理器1を通常モードで運転する。加熱調理器1は調理終了まで通常の加熱を行う。
【0034】
ステップ#105で、T1からの経過時間が指定時間を超えたときは、ステップ#109に進む。ステップ#109では、制御部30は加熱室20内に負荷が存在していないと
判断する。
【0035】
ステップ#109からステップ#110に進む。ステップ#110では、無負荷であることから、制御部30はマグネトロン25の出力を低下させる。またはマグネトロン25の発振を停止させる。これにより、無負荷運転の弊害が排除される。
【0036】
以上、本発明の実施形態につき説明したが、本発明の範囲はこれに限定されるものではなく、発明の主旨を逸脱しない範囲で種々の変更を加えて実施することができる。
【産業上の利用可能性】
【0037】
本発明は加熱調理器に広く利用可能である。
【符号の説明】
【0038】
1 加熱調理器
10 キャビネット
11 扉
20 加熱室
25 マグネトロン
27 排気口
28 蒸気センサー
30 制御部
【技術分野】
【0001】
本発明はマイクロ波で食品加熱を行う加熱調理器に関する。
【背景技術】
【0002】
マイクロ波で食品を加熱する加熱調理器は、一般的には「電子レンジ」と呼称され、家庭の必需品となっている。この種の加熱調理器では、加熱室内に食品や飲料などの被加熱物(負荷)がない状態、すなわち無負荷状態で加熱を行うことは避けるべきこととされている。というのは、無負荷状態でマイクロ波加熱を行うと、消費されないマイクロ波が大量にマグネトロンに帰還してマグネトロンの温度が上昇し、マグネトロンの劣化や破損を招くからである。また、加熱室内に置かれた物品、例えば食品載置用のトレイの一部にマイクロ波が集中し、その部分が温度上昇で破損したり、加熱室内の合成樹脂製部品が溶融したりするなどの事態も発生する。
【0003】
上述のような無負荷運転を防止するため、これまでにも種々の対策が実施されている。例えば、加熱室内の温度変化を赤外線センサーで監視し、異常な温度上昇があればマグネトロンを停止させるといったことが行われている。特許文献1に記載された加熱調理器では、サーミスタによる検出温度と湿度センサーによる検出湿度に基づいて被加熱物の有無を判断し、加熱室内に被加熱物がないと判断したときはマイクロ波加熱を停止している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−241128号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
加熱室内の温度変化を赤外線センサーで監視する方式には、赤外線センサーが温度上昇を検知するまでにタイムラグがあることから、マグネトロンが停止するまでの間に庫内の物品が高温になることがある。例えば加熱室底面を構成するセラミックガラスが高温になってしまった場合、うっかりそれに触れると火傷する恐れもある。
【0006】
特許文献1記載の加熱調理器のようにサーミスタによる検出温度と湿度センサーによる検出湿度に基づいて被加熱物の有無を判断するものでは、サーミスタと湿度センサーという2種類の検出部品が必要であり、コスト高になるという問題がある。
【0007】
本発明は上記の点に鑑みなされたものであり、マイクロ波で食品加熱を行う加熱調理器において、無負荷運転を早期に検知し排除することができ、そのためのコストも安くて済む加熱調理器を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の好ましい実施形態によれば、加熱調理器は、加熱室と、前記加熱室内の食品を加熱するマイクロ波を発生するマグネトロンと、温度の揺らぎから前記加熱室内の蒸気の有無を判定する蒸気センサーと、全体制御を行う制御部を備え、前記蒸気センサーは、蒸気センサー周辺の温度の揺らぎを検知して、温度揺らぎの大きさに応じた検知ピーク値を出力し、前記制御部は、マイクロ波による加熱開始後、次の制御ステップを遂行する。
(a)前記蒸気センサーの検知ピーク値が指定下限値を超えたかどうかを監視するステップ
(b)前記蒸気センサーの検知ピーク値が指定下限値を超えた時間T1を記録するステップ
(c)T1からの経過時間が指定時間を超えたかどうかを監視し、超えていなければ前記蒸気センサーの検知ピーク値が指定上限値を超えたかどうかを監視するステップ
(d)T1からの経過時間が指定時間を超える前に、前記蒸気センサーの検知ピーク値が指定上限値を超えたとき、加熱室内に負荷ありと判断し、通常運転に移行するステップ
(e)前記蒸気センサーの検知ピーク値が指定上限値を超える前に、T1からの経過時間が指定時間を超えたとき、加熱室内に負荷なしと判断し、前記マグネトロンの出力を低下または停止させるステップ。
【0009】
本発明の好ましい実施形態によれば、上記構成の加熱調理器において、前記蒸気センサーは、前記加熱室の外で、当該加熱室からの排気にさらされる位置に配置される。
【発明の効果】
【0010】
蒸気センサーの検知レベルは蒸気を検知すると短時間のうちに上昇する。このため、
加熱室内の負荷の有無を早期に判定できる。また、蒸気センサーは比較的安価な部品であるため、大幅なコストアップを招かない。
【図面の簡単な説明】
【0011】
【図1】加熱調理器の正面図である。
【図2】加熱調理器の概略構成を示す断面図である。
【図3】加熱調理器のブロック構成図である。
【図4】負荷の有無判断のフローチャートである。
【図5】蒸気センサーによる検知の実例を示すグラフである。
【発明を実施するための形態】
【0012】
以下、図に基づき本発明の実施形態である加熱調理器1の構造を説明する。図1において、紙面の上下は加熱調理器1の上下に一致する。また紙面左側が加熱調理器1の左側、紙面右側が加熱調理器1の右側であるものとする。
【0013】
加熱調理器1は直方体形状の板金製構造体からなるキャビネット10を備える。キャビネット10の内部には一回り小さな直方体形状の板金製構造体からなる加熱室20が設けられる。加熱室20はキャビネット10の正面側が開口部となっている。キャビネット10の正面には加熱室20の開口部を開閉する板金製の扉11が設けられる。扉11は左端を支点として開閉する。
【0014】
キャビネット10には、扉11の右側の部分に操作部12が形成される。操作部12の上部には液晶パネルからなる表示部13が配置され、その下方には複数の操作キーを備えたキー入力部14が配置される。
【0015】
加熱室20の底部の下には電波攪拌室21が形成され、その中にはモータ22によって回転する電波攪拌羽根23が配置される。加熱室20と電波攪拌室21の境界をなす開口部にはセラミックガラス24がはめ込まれる。電波攪拌室21には、マグネトロン25が発生するマイクロ波が導波管26を通じて供給される。
【0016】
加熱室20の側壁上方には多数の小孔からなる排気口27が形成される。加熱室20の外側には、排気口27から排出される排気にさらされる位置に蒸気センサー28が配置される。この位置に蒸気センサー28を配置することにより、食品から油はねが発生したり、食品が破裂して食品の破片が飛び散ったりしても、それらから蒸気センサー28を保護することができる。
【0017】
加熱調理器1の制御システムは図3に示す構成となっている。加熱調理器1全体の制御を行う制御部30はマイクロコンピュータを中核として構成され、様々な構成要素から出力信号を受け取り、また様々な構成要素に対し制御信号を出力する。
【0018】
制御部30に信号を出力する構成要素には、キー入力部14と蒸気センサー28に加えて、加熱室20内の食品の温度を監視する赤外線センサー31が含まれる。
【0019】
制御部30から制御信号を受けて動作を行う構成要素には、モータ22に加えて、マグネトロン25を発振させるインバータ基板32が含まれる。
【0020】
続いて加熱調理器1の動作を説明する。まず扉11を開け、加熱室20の中に被加熱物である食品を入れる。そして扉11を閉じ、キー入力部14を通じ加熱条件を入力して加熱を開始する。ここから図4のフローが始まる。
【0021】
ステップ#101では制御部30がインバータ基板32に指令を出してマグネトロン25を発振させる。マグネトロン25はマイクロ波を発生し、マイクロ波は導波管26を通じて電波攪拌室21に入る。電波攪拌室21に入ったマイクロ波は電波攪拌羽根23で攪拌され、セラミックガラス24を通過して加熱室20に入る。そして加熱室20に入れられた食品の分子を振動させ、食品を内部から発熱させる。
【0022】
ステップ#102では蒸気センサー28による蒸気の検知を開始する。蒸気センサー28は、サーミスタとオペアンプとで構成される。通常、サーミスタは、温度によって電気抵抗値が変化することを利用して温度を測定する温度センサーとして用いられるものであり、サーミスタ周辺の温度に応じた電圧を出力する。この時、サーミスタ周辺に蒸気が発生していると、サーミスタの表面に蒸気が結露しては気化することを繰り返すため、サーミスタの温度が小刻みに変化する。このサーミスタの温度変化による出力の揺らぎを利用して、蒸気の有無を判定するセンサーが蒸気センサー28であり、オペアンプを介して、サーミスタの出力から揺らぎ成分を抽出及び増幅して出力するようになっている。
【0023】
この構成により蒸気センサー28は、排気口27から排出される排気の中に蒸気が含まれていると、サーミスタの出力の揺らぎを検知し、揺らぎの大きさに応じた電圧を制御部
30に出力する。
【0024】
尚、蒸気センサー28は、サーミスタの出力の揺らぎから蒸気の有無を判定するタイプのものであればよく、上記通りの構成でなくても良い。
【0025】
ここで、蒸気センサー28による蒸気の有無の判定について、図5に基づき説明する。図5の縦軸は蒸気センサー28が制御部30に出力する電圧である。制御部30は所定のサンプリングレートで蒸気センサー28が出力する電圧を読み込み、それを平滑化して、図5に示す段階状のピーク値として処理する。
【0026】
図5は実験結果のグラフであり、次の4通りのパターンで加熱室20の加熱を行った場合における蒸気センサー28の検知ピーク値の変遷を示している。4通りのパターンとは、負荷として100mlの水を入れた場合、同じく負荷として300mlの水を入れた場合、同じく負荷として500mlの水を入れた場合、及び無負荷の場合である。
【0027】
負荷として水100mlを入れた場合は加熱開始後60秒を過ぎたあたりで、負荷として水300mlを入れた場合は加熱開始後120秒をまわってから、負荷として水500mlを入れた場合は加熱開始後180秒をまわってから、ピーク値が一気にはね上がる。
このように、蒸気センサー28には蒸気を検知すると検知レベルが短時間のうちに上昇するという特性がある。食品等の被加熱物には水分が含まれているため、被加熱物を入れて加熱を開始する場合も、負荷として水を入れた図5の実験例と同様の特性を示す。
【0028】
前述の通り、蒸気センサー28は、本来、蒸気の有無を判定するためのセンサーであり、蒸気が存在する場合に特定パターンの出力を生じることを期待されているが、本発明者らが実験を行った結果、無負荷で加熱を開始した場合も蒸気センサー28は出力を示し、それは負荷が存在する場合とは全く異なった出力であることが判明した。すなわち、図5に示すように、無負荷で加熱を開始した場合、蒸気センサー28は蒸気を検知した場合の検知レベルよりも低い検知ピーク値を示し、時間経過に伴いその検知ピーク値が徐々に上昇して行くという特性を示す。図4のフローはこの特性を利用して組み立てられている。
【0029】
ステップ#103では、蒸気センサー28の検知ピーク値が指定下限値を上方に超えたかどうかをチェックする。指定下限値は、図5では、例えば0.6Vに設定することができる。指定下限値を超えたらステップ#104に進み、超えたときの時間(加熱開始からの経過時間)T1を記録する。それからステップ#105に進む。
【0030】
ステップ#105では、T1からの経過時間が指定時間を超えたかどうかをチェックする。超えていない場合はステップ#106に進む。
【0031】
ステップ#106では、蒸気センサー28の検知ピーク値が指定上限値を超えたかどうかをチェックする。指定上限値は、図5では、例えば1.5Vに設定することができる。指定上限値を超えたらステップ#107に進み、超えない場合はステップ#105に戻る。
【0032】
ステップ#107に進んだということは、T1からの経過時間が指定時間に至る前に蒸気センサー28の検知ピーク値が指定上限値を突破したということであり、ここで制御部30は、加熱室20の中に負荷が存在すると判断する。図5では、負荷が100ml、300ml、500mlのいずれの場合においても、指定下限値である0.6Vを超えてから短時間のうちに指定上限値である1.5Vを超えている。従って、ステップ#105における「指定時間」には、例えば「10秒」などの比較的短い時間を設定することができる。
【0033】
ステップ#107からステップ#108に進む。ステップ#108では、無負荷運転の懸念がなくなったことから、制御部30は加熱調理器1を通常モードで運転する。加熱調理器1は調理終了まで通常の加熱を行う。
【0034】
ステップ#105で、T1からの経過時間が指定時間を超えたときは、ステップ#109に進む。ステップ#109では、制御部30は加熱室20内に負荷が存在していないと
判断する。
【0035】
ステップ#109からステップ#110に進む。ステップ#110では、無負荷であることから、制御部30はマグネトロン25の出力を低下させる。またはマグネトロン25の発振を停止させる。これにより、無負荷運転の弊害が排除される。
【0036】
以上、本発明の実施形態につき説明したが、本発明の範囲はこれに限定されるものではなく、発明の主旨を逸脱しない範囲で種々の変更を加えて実施することができる。
【産業上の利用可能性】
【0037】
本発明は加熱調理器に広く利用可能である。
【符号の説明】
【0038】
1 加熱調理器
10 キャビネット
11 扉
20 加熱室
25 マグネトロン
27 排気口
28 蒸気センサー
30 制御部
【特許請求の範囲】
【請求項1】
加熱室と、前記加熱室内の食品を加熱するマイクロ波を発生するマグネトロンと、温度の揺らぎから前記加熱室内の蒸気の有無を判定する蒸気センサーと、全体制御を行う制御部を備え、
前記蒸気センサーは、蒸気センサー周辺の温度の揺らぎを検知して、温度揺らぎの大きさに応じた検知ピーク値を出力し、
前記制御部は、マイクロ波による加熱開始後、次の制御ステップを遂行することを特徴とする加熱調理器:
(a)前記蒸気センサーの検知ピーク値が指定下限値を超えたかどうかを監視するステップ
(b)前記蒸気センサーの検知ピーク値が指定下限値を超えた時間T1を記録するステップ
(c)T1からの経過時間が指定時間を超えたかどうかを監視し、超えていなければ前記蒸気センサーの検知ピーク値が指定上限値を超えたかどうかを監視するステップ
(d)T1からの経過時間が指定時間を超える前に、前記蒸気センサーの検知ピーク値が指定上限値を超えたとき、加熱室内に負荷ありと判断し、通常運転に移行するステップ
(e)前記蒸気センサーの検知ピーク値が指定上限値を超える前に、T1からの経過時間が指定時間を超えたとき、加熱室内に負荷なしと判断し、前記マグネトロンの出力を低下または停止させるステップ。
【請求項2】
前記蒸気センサーは、前記加熱室の外で、当該加熱室からの排気にさらされる位置に配置されることを特徴とする請求項1に記載の加熱調理器。
【請求項1】
加熱室と、前記加熱室内の食品を加熱するマイクロ波を発生するマグネトロンと、温度の揺らぎから前記加熱室内の蒸気の有無を判定する蒸気センサーと、全体制御を行う制御部を備え、
前記蒸気センサーは、蒸気センサー周辺の温度の揺らぎを検知して、温度揺らぎの大きさに応じた検知ピーク値を出力し、
前記制御部は、マイクロ波による加熱開始後、次の制御ステップを遂行することを特徴とする加熱調理器:
(a)前記蒸気センサーの検知ピーク値が指定下限値を超えたかどうかを監視するステップ
(b)前記蒸気センサーの検知ピーク値が指定下限値を超えた時間T1を記録するステップ
(c)T1からの経過時間が指定時間を超えたかどうかを監視し、超えていなければ前記蒸気センサーの検知ピーク値が指定上限値を超えたかどうかを監視するステップ
(d)T1からの経過時間が指定時間を超える前に、前記蒸気センサーの検知ピーク値が指定上限値を超えたとき、加熱室内に負荷ありと判断し、通常運転に移行するステップ
(e)前記蒸気センサーの検知ピーク値が指定上限値を超える前に、T1からの経過時間が指定時間を超えたとき、加熱室内に負荷なしと判断し、前記マグネトロンの出力を低下または停止させるステップ。
【請求項2】
前記蒸気センサーは、前記加熱室の外で、当該加熱室からの排気にさらされる位置に配置されることを特徴とする請求項1に記載の加熱調理器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−13270(P2012−13270A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−148478(P2010−148478)
【出願日】平成22年6月30日(2010.6.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年6月30日(2010.6.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]