
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
車両の前後方向の加速度を検出する加速度センサから得た加速度を用いて所定の処理を行う加速度を利用した処理装置に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をディスプレイ上に道路地図とともに表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
このような車両の現在位置の表示や経路案内に際しては、車両の現在位置を検出することが基本である。そして、その車両の現在位置検出においては、例えばジャイロスコープからの出力値に基づいて算出される方位変化量及び車速センサからの出力値に基づいて算出される移動距離を用いて推測航法演算を行うものが基本技術として知られている。
【0004】
車速センサは、車速パルスのような車速信号を取り出しており、車両にナビゲーション装置を後付けする場合には、配線工事等が必要となってユーザへの負担がかかる。また、車両の種類によっては、設計上の問題から配線できない場合も考えられる。さらに、ECU(電子制御装置)に対して配線工事することとなるため、ECUが誤動作する危険も拭いきれない。
【0005】
そのため、ECUへの配線を必要とせずに移動距離を算出する手段として車両進行方向における加速度を検出する加速度センサを用い、加速度センサからの出力を2重積分して距離を求める方法が考えられる。しかし、加速度センサからの出力は、走行中の道路勾配変化による重力加速度の影響を受けた値となる。具体的には、加速度センサの出力する加速度sは、車両の駆動力による加速度をaとし、車両進行方向に垂直な方向と重力gの方向とのなす角θとすると、s=a+g・sinθとなる。
【0006】
したがって、加速度センサからの出力はこのg・sinθで示される加速度を誤差として含むことになり、道路勾配が変化すればこの誤差も変化することになる。よって、加速度センサの出力である加速度や、この加速度を積分して求めた速度、そしてこの速度を積分して求めた距離にはこうした誤差の影響が含まれてしまう。
【0007】
この問題は、GPSを用いることで解決する方法が知られている。また、特許文献1には、上下方向の加速度を計測する加速度センサを追加したり、ピッチ方向の角速度を計測するジャイロセンサを追加したり、地図データに道路勾配や高度差を追加することで、加速度センサの出力に含まれる重力の影響を補正して距離を補正する技術が開示されている。
【特許文献1】特開平8−327378号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、GPSを用いて解決する方法では、GPS用データを受信できない場所では利用できず、また、上述の特許文献1に記載の方法を実現するためには、センサやデータを新たに追加する必要があった。
【0009】
そこで、本発明は、加速度センサからの出力値を利用して所定の処理を行う装置において、これらセンサやデータを追加しなくても、またGPS非受信時であっても、道路勾配変化による重力の影響により生じる誤差を補正し、高精度の加速度、速度、距離を利用可能な加速度を利用した処理装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した問題点を解決するためになされた請求項1に記載の加速度を利用した処理装置によれば、加速度センサから得た加速度を積分して求めた速度が通常の走行状態において車両の取りうる所定の上限値を越えた場合には、該上限値を越える前に求めた距離に誤差が含まれるものとして、該速度と該上限値との差に基づいてその距離を補正する。
【0011】
加速度センサか得た加速度を積分すれば速度になり、速度を積分すれば距離となる。したがって加速度センサから得た加速度に傾斜による重力の影響が含まれる場合には、この加速度から算出した距離にも誤差が含まれることになる。そこで、請求項1に示すようにすれば、速度が上限値を越えた時点で距離を補正することができる。これは、上限値を越えるような速度の誤差は、突然生じたとは考えにくく、常に発生していたとみなすことができ、この誤差を含んだ速度を積分して求めた距離にも誤差が含まれていると考えられるからである。したがって、速度と上限値との差に基づいて距離を補正することで、累積的に距離の誤差が膨らむのを抑えることができる。
【0012】
また、請求項2に記載のように、前記加速度センサから得た加速度を積分して速度求める速度は、以下のような手法によって補正することが考えられる。
加速度センサから得た加速度を積分して車両の速度を求める際、停止状態であると判定された場合には、加速度センサから得た加速度を積分して求めた値にかかわらず、速度をゼロに補正する(第1の手法)。なお、停止中であるか否かは加速度センサから得た加速度のばらつき度合いに基づいて判定する。これは、加速度センサから得られる加速度のばらつき度合いが走行中は大きくなり、停止中は小さくなるという特性を利用したものである。走行中に加速度のばらつき度合いが大きくなる原因としては、例えば、走行時の加減速により加速度が変化するため、路面の傾斜角変化により加速度が変化するため、走行時の走行振動によるノイズの影響を受けるためなどが挙げられる。
【0013】
したがって、例えば加速度のばらつき度合いを所定の閾値とを比較し、この加速度のばらつき度合いが所定の閾値以上の場合には走行中、所定の閾値未満の場合には停止中と判定するとよい。
【0014】
また、第1の手法のようにして所定の閾値を境として停止中であるか否かを判定すると、一定速度で走行している場合(つまり、a≒0の場合)に、加速度のばらつき度合いがこの閾値より小さくなってしまうことが考えられる。したがって、走行中から停止中への判定の変更と、停止中から走行中への判定の変更を異なる閾値で行うようにしてもよい(第2の手法)。このようにすれば、高精度に停止中か走行中かを判定することができる。
【0015】
また、上記第1,2の手法において、加速度のばらつき度合いは、種々の統計的手法を用いて求めればよい。例えば、請求項2に示す第3の手法のように分散を用いて求めてもよいし、標準偏差等を用いてもよい。
【0016】
なお、請求項1,2のそれぞれに記載した加速度を利用した処理装置は、請求項3のようにすることでさらに精度の良い速度や距離を得ることができる。つまり、HPFを通すことによって加速度センサから得た加速度のうち、急激に変化する加速度が残され、緩やかに変化する加速度が除去される。したがって、緩やかに変化する加速度である重力の影響を除去することができる。
【0017】
重力の影響による加速度が緩やかに変化するのは、この加速度が前述のようにg・sinθで示され、θが緩やかに変化するためである。θが急激に変化することは、路面の傾斜が急激に変化することを意味するが、通常の道路においてはこのように路面の傾斜が急激に変化することはまれであり、通常はなだらかに変化する。一方、例えばドライバがアクセルやブレーキを操作して加減速装置を駆動して車両内部から能動的に加減速する場合には、このような重力の影響による加速度に比べて急激に変化する。
【0018】
したがって、例えば傾斜による自然な加速度の変化と車両を能動的に加減速する場合の加速度の変化とを実測しておき、傾斜時の加速度変化に相当する加速度変化値はカットするようにHPFの特性を決定すればよい。例えば、加速度の変化が実測から求めた所定の値以下である場合には加速度を0に補正するなどして、重力の影響を除去した加速度を得ることができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明が適用された実施例について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施例に何ら限定されることなく、本発明の技術的範囲に属する限り種々の形態を採りうることは言うまでもない。
【0020】
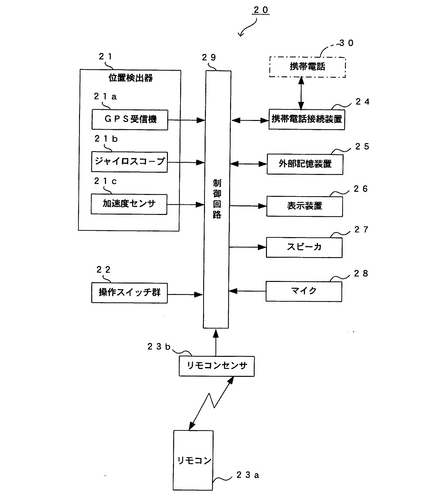
本発明の加速度を利用した処理装置の一例としてナビゲーション装置20を実施例とする。 図1はナビゲーション装置20の構成を示す図である。ナビゲーション装置20は、図1に示すように車両の現在位置を検出する位置検出器21と、ユーザからの各種指示を入力するための操作スイッチ群22と、操作スイッチ群22と同様に各種指示を入力可能なリモートコントロール端末(以下、リモコンと称す。)23aと、リモコン23aからの信号を入力するリモコンセンサ23bと、携帯電話30を接続し外部との通話または通信を行うための携帯電話接続装置24と、地図データや各種の情報を記録した外部記憶媒体から地図データ等を入力する外部記憶装置25と、地図表示画面やTV画面等の各種表示を行うための表示装置26と、各種のガイド音声等を出力するためのスピーカ27と、操作スイッチ群22やリモコン23aと同様に各種の指示を音声で入力するためのマイク28、上述した位置検出器21、操作スイッチ群22、外部記憶装置25、リモコン23aからの入力に応じて各種処理を実行し、位置検出器21、操作スイッチ群22、リモコンセンサ23b、携帯電話接続装置24、外部記憶装置25、表示装置26、スピーカ27、マイク28を制御する制御回路29とを備えている。
【0021】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置,方位,速度等を検出するGPS受信機21aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ21bと、車両の前後方向の加速度を検出するための加速度センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、GPS受信機21aやジャイロスコープ21bは備えない構成としてもよく、また、地磁気センサや左右操舵輪の回転差などから得られる車両のステアリング角を累積して方向を求めるセンサや各転動輪の車輪センサ等を用いてもよい。
【0022】
操作スイッチ群22としては、表示装置26と一体に構成され表示画面上に設置されるタッチスイッチ及び表示装置26の周囲に設けられたメカニカルなキースイッチ等が用いられる。タッチスイッチは、表示装置26の画面上に縦横無尽に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が2次元座標値(X,Y)として検出される。これによって、表示画面を直接タッチすることで、所定の指示を入力できるようにされている。
【0023】
また外部記憶装置25は、位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、その他の付加データを含む各種データを入力するための装置である。外部記憶媒体としては、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、ハードディスクなどの磁気記憶装置やメモリカード等の他の媒体を用いても良い。
【0024】
道路データは、交差点等の複数のノード間をリンクにより接続して地図を構成したものであって、それぞれのリンクに対し、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端と終端とのx,y座標、リンクの道路幅、および道路種別(有料道路等の道路情報を示すもの)のデータからなるリンク情報からなる。
【0025】
表示装置26は、カラー表示装置であり、その表示画面には位置検出器21にて検出した車両の現在地を示すマークと、外部記憶装置25より入力された地図データと、目的地マークと、携帯電話接続装置24を介して通信によって入力した他車情報と、目的地までの案内経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイドも表示もできる。また、スピーカ27は、外部記憶装置25より入力された施設のガイドや各種案内の音声を出力する。
【0026】
制御回路29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて、位置検出器21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出する現在位置算出処理、外部記憶装置25を介して読み込んだ現在位置付近の地図等を表示装置26に表示する処理や、外部記憶装置25に格納された地点データに基づき、操作スイッチ群22やリモコン23a等の操作に従って目的地となる施設を選択する目的地選択処理、現在位置から目的地までの最適な経路を自動的に選択し、この選択された経路に従って案内を行う経路案内処理を実行する。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。そして、表示装置26上の道路地図に重ねて誘導経路を表示して、ドライバーに適切なルートを案内する。
【0027】
また制御回路29は、車両が走行した累積距離を求める累積距離算出処理を行う。この累積距離算出処理にて求めた累積距離を用いて上述の現在位置算出処理を行う。この累積距離算出処理について、図2〜図5を参照して説明する。
【0028】
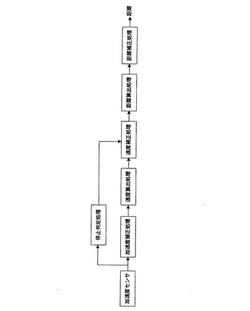
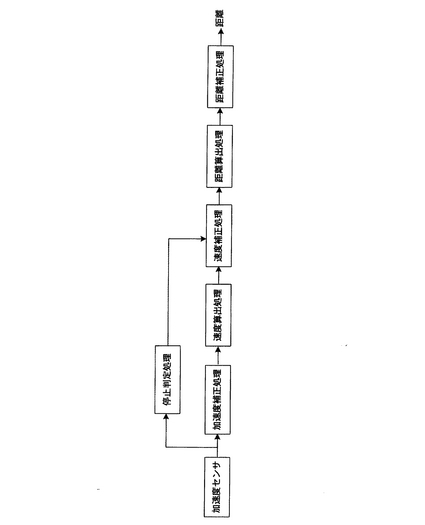
図2は、制御回路29が、加速度センサ21cから加速度を入力し、その加速度を用いて最終的に累積距離を算出する累積距離算出処理の流れを示す図である。なお、この累積距離算出処理は繰り返し行う。まず制御回路29は、加速度センサ21cから車両の前後方向の加速度を入力し、この加速度に含まれる誤差を補正する加速度補正処理を行う。そして、加速度補正処理によって補正された加速度を積分して速度を得る速度算出処理を行う。また加速度センサ21cから入力した加速度に基づいて停止中か否かを判定する停止判定処理の結果を用いて、速度に含まれる誤差を補正する速度補正処理を行い、補正された速度を積分して距離を算出する距離算出処理を行う。そして、算出された距離を距離補正処理によって補正して累積距離を求める。このような累積距離算出処理中の各処理の内容について以下に説明する。
【0029】
加速度補正処理は、加速度センサ21cの出力値に含まれる道路勾配の影響をHPF(High Pass Filter)で除去する処理である。これは、車両が加減速する場合の加速度は比較的急激に変化するが、路面の傾斜による加速度は比較的緩やかに変化する特性を利用したものであり、HPFによって、急激に変化する値を残し、緩やかに変化する値を除去することで傾斜の影響を補正することができる。
【0030】
このように加速度補正処理によって補正された加速度を積分して速度を求める。このように加速度を積分して速度を求める処理が速度算出処理であり、この処理は公知の処理である。
【0031】
このように速度算出処理によって求められた速度は、速度補正処理において、停止判定処理の判定結果である停止判定フラグを用いて補正する。したがってまず、停止しているか否かを判定する停止判定処理について説明する。
【0032】
停止判定処理では、加速度センサ21cから出力された出力値を、n秒間分制御回路29内に記憶し、その記憶した加速度センサ出力値の分散Dgを用いて停止中か否かを判定する。停止中であると判定した場合には、停止中フラグをセットし、停止中でないと判定した場合にはクリアする。
【0033】
この分散Dgは、過去n秒間の加速度センサ出力値の平均値を中心とした過去n秒間の分散であり、分散Dgは走行中は大きくなり、停止中は小さくなる。走行中に分散Dgが大きくなる原因としては、走行時の加減速により加速度が変化するため、路面の傾斜角変化により加速度が変化するため、走行時の走行振動によるノイズの影響を受けるためなどが挙げられる。以上の理由から、閾値を設けて分散が閾値以上の場合には走行中、閾値以下の場合には停止中と判断できる。
【0034】
以下、図3のフローチャートにしたがって処理を説明する。
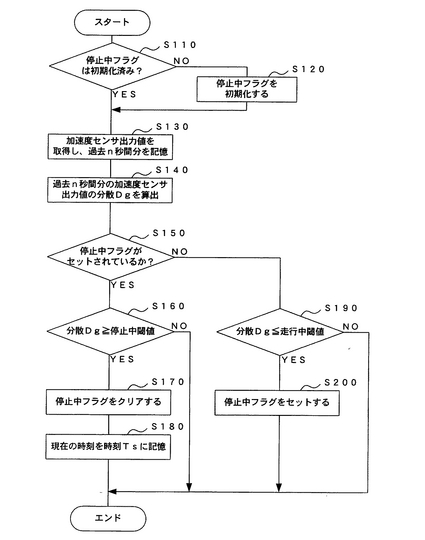
図3のS110では、停止中フラグが初期化済みであるか否かを判定する。停止中フラグが初期化済みでない場合には(S110:NO)、S120へ移行し停止中フラグを初期化(クリア)してS130へ移行する。一方、停止中フラグが初期化済みである場合には(S110:YES)、S130へ移行する。
【0035】
S130では、加速度センサ21cの出力値を取得し、過去n秒間分の出力値を制御回路29内に記憶する。
続くS140では、S130で記憶した過去n秒分の加速度センサ出力値の分散Dgを算出する。
【0036】
続くS150では、停止中フラグがセットされているか否かを判定し、停止中フラグがセットされている場合には(S150:YES)、S160へ移行する。一方、停止中フラグがセットされていない場合には(S150:NO)、S190へ移行する。
【0037】
S160では、S140で算出した分散Dgが、予め設定された停止中閾値以上であるか否かを判定し、停止中閾値以上である場合には(S160:YES)、S170へ移行し、停止中フラグをクリアして、S180でこの時点の時刻を時刻Tsに記憶する。一方、分散Dgが停止中閾値未満である場合には(S160:NO)、そのまま終了する。したがって、停止中フラグは変更しないので、セットされたままとなる。
【0038】
一方、S190では、S140で算出した分散Dgが、予め設定された走行中閾値以下であるか否かを判定し、走行中閾値以下であれば(S190:YES)、S200へ移行して停止中フラグをセットする。一方、走行中閾値未満であれば(S190:NO)、そのまま終了する。したがって、停止中フラグは変更しないので、クリアされたままとなる。
【0039】
なお、停止中閾値は、例えば、停止中の加速度の分散の最大値、停止状態から加速する時の加速度の分散の最小値、または、停止中の加速度の分散の最大値と停止状態から加速する時の分散の最小値の平均値等を実測して用いるとよい。一方、走行中閾値は、例えば、走行中の加速度の分散の最小値、停止中の分散の最小値、または、走行中の分散の最小値と停止中の分散の平均値との平均値を実測して用いるとよい。
【0040】
このようにすると停止中の閾値と走行中の閾値の大小関係は、「停止中閾値」>「走行中閾値」となる。すなわち、停止中の場合には、走行中の閾値を越えても停止中の閾値を越えない限りは停止中と判断し、走行中の場合には、停止中の閾値を下回ったとしても、走行中の閾値を上回っている限りには走行中と判断する。このようにすることで、走行中に停止中であると判断したり、停止中に走行中であると判断してしまうことを抑制でき、停止中であるか走行中であるかの判定をより高精度に行うことができる。
【0041】
このようにして設定された停止中フラグを用いて、前述の速度算出処理によって算出された速度に含まれる誤差を補正する速度補正処理を行う。この速度補正処理を図4のフローチャートに示して説明する。
【0042】
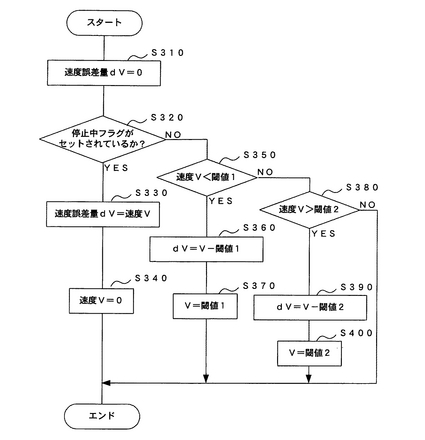
図4に示すように、S310では、速度誤差量dVをゼロにする。
続くS320では、停止中フラグがセットされているか否かを判定する。停止中フラグがセットされている場合には(S320:YES)、S330へ移行し、停止中フラグがセットされていない場合には(S320:NO)、S350へ移行する。
【0043】
S330では、速度誤差量dVを前述の速度算出処理によって求めた速度Vとする。そして、続くS340で、この速度Vをゼロにする。
一方、S350では、速度Vが閾値1未満であるか否かを判定する。速度Vが閾値1未満である場合には(S350:YES)、S360へ移行し、速度Vが閾値1以上である場合には(S350:NO)、S380へ移行する。
【0044】
S360では、速度Vから閾値1を引いた値を速度誤差量dVとする。そして、続くS370では、速度Vの値を閾値1の値とする。
一方、S380では、速度Vが閾値2より大きいか否かを判定する。速度Vが閾値2より大きい場合には(S380:YES)、S390へ移行し、速度Vが閾値2以下である場合には(S380:NO)、処理を終了する。
【0045】
S390では、速度Vから閾値2を引いた値を速度誤差量dVとする。そして、続くS400で速度Vの値を閾値2の値とする。
このようにすることで、速度誤差量dVを求め、速度Vを補正することができる。すなわち、停止判定処理によって停止中であると判定されている場合には(S320:YES)、速度Vは本来ゼロであるはずなので、その速度Vを速度誤差量dVにセットし、速度Vをゼロとする。一方、停止中でないと判定されている場合(S320:NO)には、速度Vを閾値1≦速度V≦閾値2に制限し、この値域を外れた分の速度を速度誤差量dVとする。なお、これらの閾値は、通常の走行時にはあり得ない速度を排除できるような値に設定する。例えば閾値1は0とし、閾値2は法定速度とするとよい。
【0046】
このようにして補正された速度Vは距離算出処理において、積分して累積距離Dを求める。この距離算出処理は公知の処理である。
こうして求めた累積距離Dを補正する距離補正処理を図5のフローチャートに示して説明する。
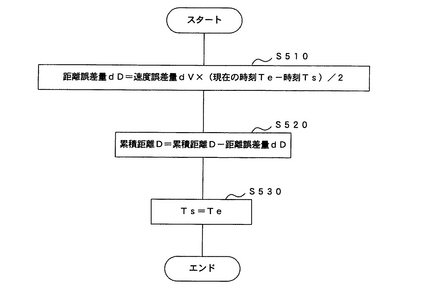
【0047】
図5に示すようにS510では、累積誤差量dDを算出する。累積誤差量dDは次に示す式で算出する。
累積誤差量dD=速度誤差量dV×(現在の時刻Te−走行し始めた時刻Ts)/2
これは、走行し始めた時刻Tsでは速度誤差がゼロであり、その後現在までに徐々に速度誤差が増加するためである。
【0048】
続くS520では、距離算出処理によって算出された累積距離Dから、S510で算出した累積誤差量dDを引いて補正後の累積距離Dを求める。
そして、S530では、時刻Teを時刻Tsに設定する。
【0049】
このような距離補正処理によって、さらに精度のよい累積距離Dを求めることができる。
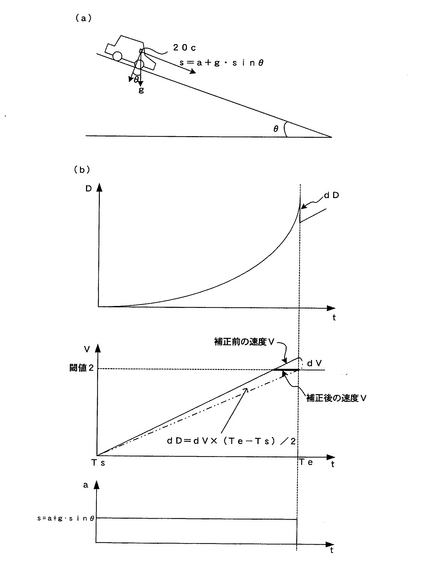
この距離補正処理の内容を図6に示す具体例でさらに詳しく説明する。図6(a)は、車両に搭載された角度θの勾配をもつ道路を車両が走行している様子を示す図である。例えば、図6(a)に示すように角度θの勾配をもつ坂道を車両を下る場合には、加速度センサ21cからは、重力gの車両の進行方向への成分であるg・sinθと、車両の駆動輪からの加速度aとの合成された加速度sが得られる(s=a+g・sinθ)。
【0050】
したがって、この坂道で停車状態(時刻Ts)から加速度sで走行した場合には、図6(b)に示すように、この加速度sを積分して求めた速度Vは一次関数となり、その速度Vを積分して求めた距離Dは2次関数となる。このとき、速度Vが閾値2を越えると(時刻Te)、図4に示したS390で速度Vは閾値2の値に制限される。したがって速度Vは、図6(b)の中段の速度のグラフに示す補正後の速度Vとなる。
【0051】
また、図4のS390では速度誤差量dVを速度誤差量dV=速度V−閾値2として求める。そして、図5のS510では、この速度誤差量dVを用いて距離誤差量dDを求める。この距離誤差量dDは、図6(b)の速度のグラフにおいて、底辺をdV、高さを(Te−Ts)とする三角形の面積に相当する。つまり、この面積に相当する誤差が距離Dに含まれているとみなして引く(S520)。したがって、図6(b)の上段の距離Dのグラフに示すように、時刻Teにおいて、時刻Tsから累積的に加算された距離の誤差dDを引き、ほぼ適切な距離Dを時刻Teにおいて得ることができる。したがって時刻Tsを時刻Teとしてこの時刻から次回はDの補正が行われるようにする(S530)。
【0052】
以上のような累積距離算出処理により、加速度センサの出力から傾斜の影響を除去した高精度の累積距離を求めることができる。なお上記実施例では、累積距離を利用しているが、例えば、それぞれの処理の結果である加速度、速度を利用するようにしてもよい。このようにすれば、それぞれの処理において、精度の高い加速度、速度、距離を利用することができる。したがって、車速センサ等のような加速度センサ21c以外の検出手段にナビゲーション装置20を接続したり、他のセンサをナビゲーション装置20に追加しなくても、加速度、速度、距離を用いた処理を実行することができる。
【図面の簡単な説明】
【0053】
【図1】加速度を利用した処理装置としてのナビゲーション装置の構成を示すブロック図である。
【図2】累積距離算出処理の処理ブロックを示す説明図である。
【図3】停止判定処理を示すフローチャートである。
【図4】速度補正処理を示すフローチャートである。
【図5】距離補正処理を示すフローチャートである。
【図6】距離補正処理を具体例で説明する説明図である。
【符号の説明】
【0054】
20…ナビゲーション装置
21…位置検出器
21a…GPS受信機
21b…ジャイロスコープ
21c…加速度センサ
22…操作スイッチ群
23a…リモコン
23b…リモコンセンサ
24…携帯電話接続装置
25…外部記憶装置
26…表示装置
27…スピーカ
28…マイク
29…制御回路
30…携帯電話
【技術分野】
【0001】
車両の前後方向の加速度を検出する加速度センサから得た加速度を用いて所定の処理を行う加速度を利用した処理装置に関する。
【背景技術】
【0002】
自動車の走行に伴って移動していく現在位置をディスプレイ上に道路地図とともに表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行うナビゲーション装置が知られており、より円滑なドライブに寄与している。
【0003】
このような車両の現在位置の表示や経路案内に際しては、車両の現在位置を検出することが基本である。そして、その車両の現在位置検出においては、例えばジャイロスコープからの出力値に基づいて算出される方位変化量及び車速センサからの出力値に基づいて算出される移動距離を用いて推測航法演算を行うものが基本技術として知られている。
【0004】
車速センサは、車速パルスのような車速信号を取り出しており、車両にナビゲーション装置を後付けする場合には、配線工事等が必要となってユーザへの負担がかかる。また、車両の種類によっては、設計上の問題から配線できない場合も考えられる。さらに、ECU(電子制御装置)に対して配線工事することとなるため、ECUが誤動作する危険も拭いきれない。
【0005】
そのため、ECUへの配線を必要とせずに移動距離を算出する手段として車両進行方向における加速度を検出する加速度センサを用い、加速度センサからの出力を2重積分して距離を求める方法が考えられる。しかし、加速度センサからの出力は、走行中の道路勾配変化による重力加速度の影響を受けた値となる。具体的には、加速度センサの出力する加速度sは、車両の駆動力による加速度をaとし、車両進行方向に垂直な方向と重力gの方向とのなす角θとすると、s=a+g・sinθとなる。
【0006】
したがって、加速度センサからの出力はこのg・sinθで示される加速度を誤差として含むことになり、道路勾配が変化すればこの誤差も変化することになる。よって、加速度センサの出力である加速度や、この加速度を積分して求めた速度、そしてこの速度を積分して求めた距離にはこうした誤差の影響が含まれてしまう。
【0007】
この問題は、GPSを用いることで解決する方法が知られている。また、特許文献1には、上下方向の加速度を計測する加速度センサを追加したり、ピッチ方向の角速度を計測するジャイロセンサを追加したり、地図データに道路勾配や高度差を追加することで、加速度センサの出力に含まれる重力の影響を補正して距離を補正する技術が開示されている。
【特許文献1】特開平8−327378号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、GPSを用いて解決する方法では、GPS用データを受信できない場所では利用できず、また、上述の特許文献1に記載の方法を実現するためには、センサやデータを新たに追加する必要があった。
【0009】
そこで、本発明は、加速度センサからの出力値を利用して所定の処理を行う装置において、これらセンサやデータを追加しなくても、またGPS非受信時であっても、道路勾配変化による重力の影響により生じる誤差を補正し、高精度の加速度、速度、距離を利用可能な加速度を利用した処理装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した問題点を解決するためになされた請求項1に記載の加速度を利用した処理装置によれば、加速度センサから得た加速度を積分して求めた速度が通常の走行状態において車両の取りうる所定の上限値を越えた場合には、該上限値を越える前に求めた距離に誤差が含まれるものとして、該速度と該上限値との差に基づいてその距離を補正する。
【0011】
加速度センサか得た加速度を積分すれば速度になり、速度を積分すれば距離となる。したがって加速度センサから得た加速度に傾斜による重力の影響が含まれる場合には、この加速度から算出した距離にも誤差が含まれることになる。そこで、請求項1に示すようにすれば、速度が上限値を越えた時点で距離を補正することができる。これは、上限値を越えるような速度の誤差は、突然生じたとは考えにくく、常に発生していたとみなすことができ、この誤差を含んだ速度を積分して求めた距離にも誤差が含まれていると考えられるからである。したがって、速度と上限値との差に基づいて距離を補正することで、累積的に距離の誤差が膨らむのを抑えることができる。
【0012】
また、請求項2に記載のように、前記加速度センサから得た加速度を積分して速度求める速度は、以下のような手法によって補正することが考えられる。
加速度センサから得た加速度を積分して車両の速度を求める際、停止状態であると判定された場合には、加速度センサから得た加速度を積分して求めた値にかかわらず、速度をゼロに補正する(第1の手法)。なお、停止中であるか否かは加速度センサから得た加速度のばらつき度合いに基づいて判定する。これは、加速度センサから得られる加速度のばらつき度合いが走行中は大きくなり、停止中は小さくなるという特性を利用したものである。走行中に加速度のばらつき度合いが大きくなる原因としては、例えば、走行時の加減速により加速度が変化するため、路面の傾斜角変化により加速度が変化するため、走行時の走行振動によるノイズの影響を受けるためなどが挙げられる。
【0013】
したがって、例えば加速度のばらつき度合いを所定の閾値とを比較し、この加速度のばらつき度合いが所定の閾値以上の場合には走行中、所定の閾値未満の場合には停止中と判定するとよい。
【0014】
また、第1の手法のようにして所定の閾値を境として停止中であるか否かを判定すると、一定速度で走行している場合(つまり、a≒0の場合)に、加速度のばらつき度合いがこの閾値より小さくなってしまうことが考えられる。したがって、走行中から停止中への判定の変更と、停止中から走行中への判定の変更を異なる閾値で行うようにしてもよい(第2の手法)。このようにすれば、高精度に停止中か走行中かを判定することができる。
【0015】
また、上記第1,2の手法において、加速度のばらつき度合いは、種々の統計的手法を用いて求めればよい。例えば、請求項2に示す第3の手法のように分散を用いて求めてもよいし、標準偏差等を用いてもよい。
【0016】
なお、請求項1,2のそれぞれに記載した加速度を利用した処理装置は、請求項3のようにすることでさらに精度の良い速度や距離を得ることができる。つまり、HPFを通すことによって加速度センサから得た加速度のうち、急激に変化する加速度が残され、緩やかに変化する加速度が除去される。したがって、緩やかに変化する加速度である重力の影響を除去することができる。
【0017】
重力の影響による加速度が緩やかに変化するのは、この加速度が前述のようにg・sinθで示され、θが緩やかに変化するためである。θが急激に変化することは、路面の傾斜が急激に変化することを意味するが、通常の道路においてはこのように路面の傾斜が急激に変化することはまれであり、通常はなだらかに変化する。一方、例えばドライバがアクセルやブレーキを操作して加減速装置を駆動して車両内部から能動的に加減速する場合には、このような重力の影響による加速度に比べて急激に変化する。
【0018】
したがって、例えば傾斜による自然な加速度の変化と車両を能動的に加減速する場合の加速度の変化とを実測しておき、傾斜時の加速度変化に相当する加速度変化値はカットするようにHPFの特性を決定すればよい。例えば、加速度の変化が実測から求めた所定の値以下である場合には加速度を0に補正するなどして、重力の影響を除去した加速度を得ることができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明が適用された実施例について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施例に何ら限定されることなく、本発明の技術的範囲に属する限り種々の形態を採りうることは言うまでもない。
【0020】
本発明の加速度を利用した処理装置の一例としてナビゲーション装置20を実施例とする。 図1はナビゲーション装置20の構成を示す図である。ナビゲーション装置20は、図1に示すように車両の現在位置を検出する位置検出器21と、ユーザからの各種指示を入力するための操作スイッチ群22と、操作スイッチ群22と同様に各種指示を入力可能なリモートコントロール端末(以下、リモコンと称す。)23aと、リモコン23aからの信号を入力するリモコンセンサ23bと、携帯電話30を接続し外部との通話または通信を行うための携帯電話接続装置24と、地図データや各種の情報を記録した外部記憶媒体から地図データ等を入力する外部記憶装置25と、地図表示画面やTV画面等の各種表示を行うための表示装置26と、各種のガイド音声等を出力するためのスピーカ27と、操作スイッチ群22やリモコン23aと同様に各種の指示を音声で入力するためのマイク28、上述した位置検出器21、操作スイッチ群22、外部記憶装置25、リモコン23aからの入力に応じて各種処理を実行し、位置検出器21、操作スイッチ群22、リモコンセンサ23b、携帯電話接続装置24、外部記憶装置25、表示装置26、スピーカ27、マイク28を制御する制御回路29とを備えている。
【0021】
位置検出器21は、GPS(Global Positioning System)用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置,方位,速度等を検出するGPS受信機21aと、車両に加えられる回転運動の大きさを検出するジャイロスコープ21bと、車両の前後方向の加速度を検出するための加速度センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。なお、精度によっては、GPS受信機21aやジャイロスコープ21bは備えない構成としてもよく、また、地磁気センサや左右操舵輪の回転差などから得られる車両のステアリング角を累積して方向を求めるセンサや各転動輪の車輪センサ等を用いてもよい。
【0022】
操作スイッチ群22としては、表示装置26と一体に構成され表示画面上に設置されるタッチスイッチ及び表示装置26の周囲に設けられたメカニカルなキースイッチ等が用いられる。タッチスイッチは、表示装置26の画面上に縦横無尽に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が2次元座標値(X,Y)として検出される。これによって、表示画面を直接タッチすることで、所定の指示を入力できるようにされている。
【0023】
また外部記憶装置25は、位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、その他の付加データを含む各種データを入力するための装置である。外部記憶媒体としては、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、ハードディスクなどの磁気記憶装置やメモリカード等の他の媒体を用いても良い。
【0024】
道路データは、交差点等の複数のノード間をリンクにより接続して地図を構成したものであって、それぞれのリンクに対し、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端と終端とのx,y座標、リンクの道路幅、および道路種別(有料道路等の道路情報を示すもの)のデータからなるリンク情報からなる。
【0025】
表示装置26は、カラー表示装置であり、その表示画面には位置検出器21にて検出した車両の現在地を示すマークと、外部記憶装置25より入力された地図データと、目的地マークと、携帯電話接続装置24を介して通信によって入力した他車情報と、目的地までの案内経路、名称、目印、各種施設のマーク等の付加データとを重ねて表示することができる。また、施設のガイドも表示もできる。また、スピーカ27は、外部記憶装置25より入力された施設のガイドや各種案内の音声を出力する。
【0026】
制御回路29は、CPU,ROM,RAM,I/O及びこれらの構成を接続するバスラインなどからなる周知のマイクロコンピュータを中心に構成されており、ROM及びRAMに記憶されたプログラムに基づいて、位置検出器21からの各検出信号に基づき座標及び進行方向の組として車両の現在位置を算出する現在位置算出処理、外部記憶装置25を介して読み込んだ現在位置付近の地図等を表示装置26に表示する処理や、外部記憶装置25に格納された地点データに基づき、操作スイッチ群22やリモコン23a等の操作に従って目的地となる施設を選択する目的地選択処理、現在位置から目的地までの最適な経路を自動的に選択し、この選択された経路に従って案内を行う経路案内処理を実行する。このように自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。そして、表示装置26上の道路地図に重ねて誘導経路を表示して、ドライバーに適切なルートを案内する。
【0027】
また制御回路29は、車両が走行した累積距離を求める累積距離算出処理を行う。この累積距離算出処理にて求めた累積距離を用いて上述の現在位置算出処理を行う。この累積距離算出処理について、図2〜図5を参照して説明する。
【0028】
図2は、制御回路29が、加速度センサ21cから加速度を入力し、その加速度を用いて最終的に累積距離を算出する累積距離算出処理の流れを示す図である。なお、この累積距離算出処理は繰り返し行う。まず制御回路29は、加速度センサ21cから車両の前後方向の加速度を入力し、この加速度に含まれる誤差を補正する加速度補正処理を行う。そして、加速度補正処理によって補正された加速度を積分して速度を得る速度算出処理を行う。また加速度センサ21cから入力した加速度に基づいて停止中か否かを判定する停止判定処理の結果を用いて、速度に含まれる誤差を補正する速度補正処理を行い、補正された速度を積分して距離を算出する距離算出処理を行う。そして、算出された距離を距離補正処理によって補正して累積距離を求める。このような累積距離算出処理中の各処理の内容について以下に説明する。
【0029】
加速度補正処理は、加速度センサ21cの出力値に含まれる道路勾配の影響をHPF(High Pass Filter)で除去する処理である。これは、車両が加減速する場合の加速度は比較的急激に変化するが、路面の傾斜による加速度は比較的緩やかに変化する特性を利用したものであり、HPFによって、急激に変化する値を残し、緩やかに変化する値を除去することで傾斜の影響を補正することができる。
【0030】
このように加速度補正処理によって補正された加速度を積分して速度を求める。このように加速度を積分して速度を求める処理が速度算出処理であり、この処理は公知の処理である。
【0031】
このように速度算出処理によって求められた速度は、速度補正処理において、停止判定処理の判定結果である停止判定フラグを用いて補正する。したがってまず、停止しているか否かを判定する停止判定処理について説明する。
【0032】
停止判定処理では、加速度センサ21cから出力された出力値を、n秒間分制御回路29内に記憶し、その記憶した加速度センサ出力値の分散Dgを用いて停止中か否かを判定する。停止中であると判定した場合には、停止中フラグをセットし、停止中でないと判定した場合にはクリアする。
【0033】
この分散Dgは、過去n秒間の加速度センサ出力値の平均値を中心とした過去n秒間の分散であり、分散Dgは走行中は大きくなり、停止中は小さくなる。走行中に分散Dgが大きくなる原因としては、走行時の加減速により加速度が変化するため、路面の傾斜角変化により加速度が変化するため、走行時の走行振動によるノイズの影響を受けるためなどが挙げられる。以上の理由から、閾値を設けて分散が閾値以上の場合には走行中、閾値以下の場合には停止中と判断できる。
【0034】
以下、図3のフローチャートにしたがって処理を説明する。
図3のS110では、停止中フラグが初期化済みであるか否かを判定する。停止中フラグが初期化済みでない場合には(S110:NO)、S120へ移行し停止中フラグを初期化(クリア)してS130へ移行する。一方、停止中フラグが初期化済みである場合には(S110:YES)、S130へ移行する。
【0035】
S130では、加速度センサ21cの出力値を取得し、過去n秒間分の出力値を制御回路29内に記憶する。
続くS140では、S130で記憶した過去n秒分の加速度センサ出力値の分散Dgを算出する。
【0036】
続くS150では、停止中フラグがセットされているか否かを判定し、停止中フラグがセットされている場合には(S150:YES)、S160へ移行する。一方、停止中フラグがセットされていない場合には(S150:NO)、S190へ移行する。
【0037】
S160では、S140で算出した分散Dgが、予め設定された停止中閾値以上であるか否かを判定し、停止中閾値以上である場合には(S160:YES)、S170へ移行し、停止中フラグをクリアして、S180でこの時点の時刻を時刻Tsに記憶する。一方、分散Dgが停止中閾値未満である場合には(S160:NO)、そのまま終了する。したがって、停止中フラグは変更しないので、セットされたままとなる。
【0038】
一方、S190では、S140で算出した分散Dgが、予め設定された走行中閾値以下であるか否かを判定し、走行中閾値以下であれば(S190:YES)、S200へ移行して停止中フラグをセットする。一方、走行中閾値未満であれば(S190:NO)、そのまま終了する。したがって、停止中フラグは変更しないので、クリアされたままとなる。
【0039】
なお、停止中閾値は、例えば、停止中の加速度の分散の最大値、停止状態から加速する時の加速度の分散の最小値、または、停止中の加速度の分散の最大値と停止状態から加速する時の分散の最小値の平均値等を実測して用いるとよい。一方、走行中閾値は、例えば、走行中の加速度の分散の最小値、停止中の分散の最小値、または、走行中の分散の最小値と停止中の分散の平均値との平均値を実測して用いるとよい。
【0040】
このようにすると停止中の閾値と走行中の閾値の大小関係は、「停止中閾値」>「走行中閾値」となる。すなわち、停止中の場合には、走行中の閾値を越えても停止中の閾値を越えない限りは停止中と判断し、走行中の場合には、停止中の閾値を下回ったとしても、走行中の閾値を上回っている限りには走行中と判断する。このようにすることで、走行中に停止中であると判断したり、停止中に走行中であると判断してしまうことを抑制でき、停止中であるか走行中であるかの判定をより高精度に行うことができる。
【0041】
このようにして設定された停止中フラグを用いて、前述の速度算出処理によって算出された速度に含まれる誤差を補正する速度補正処理を行う。この速度補正処理を図4のフローチャートに示して説明する。
【0042】
図4に示すように、S310では、速度誤差量dVをゼロにする。
続くS320では、停止中フラグがセットされているか否かを判定する。停止中フラグがセットされている場合には(S320:YES)、S330へ移行し、停止中フラグがセットされていない場合には(S320:NO)、S350へ移行する。
【0043】
S330では、速度誤差量dVを前述の速度算出処理によって求めた速度Vとする。そして、続くS340で、この速度Vをゼロにする。
一方、S350では、速度Vが閾値1未満であるか否かを判定する。速度Vが閾値1未満である場合には(S350:YES)、S360へ移行し、速度Vが閾値1以上である場合には(S350:NO)、S380へ移行する。
【0044】
S360では、速度Vから閾値1を引いた値を速度誤差量dVとする。そして、続くS370では、速度Vの値を閾値1の値とする。
一方、S380では、速度Vが閾値2より大きいか否かを判定する。速度Vが閾値2より大きい場合には(S380:YES)、S390へ移行し、速度Vが閾値2以下である場合には(S380:NO)、処理を終了する。
【0045】
S390では、速度Vから閾値2を引いた値を速度誤差量dVとする。そして、続くS400で速度Vの値を閾値2の値とする。
このようにすることで、速度誤差量dVを求め、速度Vを補正することができる。すなわち、停止判定処理によって停止中であると判定されている場合には(S320:YES)、速度Vは本来ゼロであるはずなので、その速度Vを速度誤差量dVにセットし、速度Vをゼロとする。一方、停止中でないと判定されている場合(S320:NO)には、速度Vを閾値1≦速度V≦閾値2に制限し、この値域を外れた分の速度を速度誤差量dVとする。なお、これらの閾値は、通常の走行時にはあり得ない速度を排除できるような値に設定する。例えば閾値1は0とし、閾値2は法定速度とするとよい。
【0046】
このようにして補正された速度Vは距離算出処理において、積分して累積距離Dを求める。この距離算出処理は公知の処理である。
こうして求めた累積距離Dを補正する距離補正処理を図5のフローチャートに示して説明する。
【0047】
図5に示すようにS510では、累積誤差量dDを算出する。累積誤差量dDは次に示す式で算出する。
累積誤差量dD=速度誤差量dV×(現在の時刻Te−走行し始めた時刻Ts)/2
これは、走行し始めた時刻Tsでは速度誤差がゼロであり、その後現在までに徐々に速度誤差が増加するためである。
【0048】
続くS520では、距離算出処理によって算出された累積距離Dから、S510で算出した累積誤差量dDを引いて補正後の累積距離Dを求める。
そして、S530では、時刻Teを時刻Tsに設定する。
【0049】
このような距離補正処理によって、さらに精度のよい累積距離Dを求めることができる。
この距離補正処理の内容を図6に示す具体例でさらに詳しく説明する。図6(a)は、車両に搭載された角度θの勾配をもつ道路を車両が走行している様子を示す図である。例えば、図6(a)に示すように角度θの勾配をもつ坂道を車両を下る場合には、加速度センサ21cからは、重力gの車両の進行方向への成分であるg・sinθと、車両の駆動輪からの加速度aとの合成された加速度sが得られる(s=a+g・sinθ)。
【0050】
したがって、この坂道で停車状態(時刻Ts)から加速度sで走行した場合には、図6(b)に示すように、この加速度sを積分して求めた速度Vは一次関数となり、その速度Vを積分して求めた距離Dは2次関数となる。このとき、速度Vが閾値2を越えると(時刻Te)、図4に示したS390で速度Vは閾値2の値に制限される。したがって速度Vは、図6(b)の中段の速度のグラフに示す補正後の速度Vとなる。
【0051】
また、図4のS390では速度誤差量dVを速度誤差量dV=速度V−閾値2として求める。そして、図5のS510では、この速度誤差量dVを用いて距離誤差量dDを求める。この距離誤差量dDは、図6(b)の速度のグラフにおいて、底辺をdV、高さを(Te−Ts)とする三角形の面積に相当する。つまり、この面積に相当する誤差が距離Dに含まれているとみなして引く(S520)。したがって、図6(b)の上段の距離Dのグラフに示すように、時刻Teにおいて、時刻Tsから累積的に加算された距離の誤差dDを引き、ほぼ適切な距離Dを時刻Teにおいて得ることができる。したがって時刻Tsを時刻Teとしてこの時刻から次回はDの補正が行われるようにする(S530)。
【0052】
以上のような累積距離算出処理により、加速度センサの出力から傾斜の影響を除去した高精度の累積距離を求めることができる。なお上記実施例では、累積距離を利用しているが、例えば、それぞれの処理の結果である加速度、速度を利用するようにしてもよい。このようにすれば、それぞれの処理において、精度の高い加速度、速度、距離を利用することができる。したがって、車速センサ等のような加速度センサ21c以外の検出手段にナビゲーション装置20を接続したり、他のセンサをナビゲーション装置20に追加しなくても、加速度、速度、距離を用いた処理を実行することができる。
【図面の簡単な説明】
【0053】
【図1】加速度を利用した処理装置としてのナビゲーション装置の構成を示すブロック図である。
【図2】累積距離算出処理の処理ブロックを示す説明図である。
【図3】停止判定処理を示すフローチャートである。
【図4】速度補正処理を示すフローチャートである。
【図5】距離補正処理を示すフローチャートである。
【図6】距離補正処理を具体例で説明する説明図である。
【符号の説明】
【0054】
20…ナビゲーション装置
21…位置検出器
21a…GPS受信機
21b…ジャイロスコープ
21c…加速度センサ
22…操作スイッチ群
23a…リモコン
23b…リモコンセンサ
24…携帯電話接続装置
25…外部記憶装置
26…表示装置
27…スピーカ
28…マイク
29…制御回路
30…携帯電話
【特許請求の範囲】
【請求項1】
車両の前後方向の加速度を検出する加速度センサから得た加速度を用いて所定の処理を行う加速度を利用した処理装置であって、
前記所定の処理の少なくとも一部として、前記加速度センサから得た加速度を積分して速度を求め、速度を積分して距離を求め、
その速度が通常の走行状態において車両の取りうる所定の上限値を越えた場合には、該上限値を越える前に求めた距離に誤差が含まれるものとして、該速度と該上限値との差に基づいてその距離を補正すること
を特徴とする加速度を利用した処理装置。
【請求項2】
請求項1に記載の加速度を利用した処理装置において、
前記速度は、
前記加速度センサから得た加速度のばらつき度合いに基づいて停止状態であるか否かを判定する停止判定を行い、該停止判定で停止状態であると判定された場合には、前記加速度センサから得た加速度を積分して求めた値にかかわらず、速度をゼロとする第1の手法、
若しくは、前記第1の手法において、前記停止判定は、前回の停止判定によって停止状態であると判定された場合であって前記加速度のばらつき度合いが所定の停止中閾値以上である場合に走行状態であると判定し、前回の停止判定により走行状態であると判定された場合であって前記加速度のばらつき度合いが所定の走行中閾値以下である場合に停止状態であると判定し、それ以外の場合には前回の停止判定結果と同じ状態であると判定する第2の手法、
または、前記第1の手法若しくは前記第2の手法において、前記加速度のばらつき度合いは、前記加速度の分散とする第3の手法で補正した速度であること
を特徴とする加速度を利用した処理装置。
【請求項3】
請求項1または2に記載の加速度利用装置において、
前記加速度センサから得た加速度は、HPFを通して補正した加速度であること
を特徴とする加速度を利用した処理装置。
【請求項1】
車両の前後方向の加速度を検出する加速度センサから得た加速度を用いて所定の処理を行う加速度を利用した処理装置であって、
前記所定の処理の少なくとも一部として、前記加速度センサから得た加速度を積分して速度を求め、速度を積分して距離を求め、
その速度が通常の走行状態において車両の取りうる所定の上限値を越えた場合には、該上限値を越える前に求めた距離に誤差が含まれるものとして、該速度と該上限値との差に基づいてその距離を補正すること
を特徴とする加速度を利用した処理装置。
【請求項2】
請求項1に記載の加速度を利用した処理装置において、
前記速度は、
前記加速度センサから得た加速度のばらつき度合いに基づいて停止状態であるか否かを判定する停止判定を行い、該停止判定で停止状態であると判定された場合には、前記加速度センサから得た加速度を積分して求めた値にかかわらず、速度をゼロとする第1の手法、
若しくは、前記第1の手法において、前記停止判定は、前回の停止判定によって停止状態であると判定された場合であって前記加速度のばらつき度合いが所定の停止中閾値以上である場合に走行状態であると判定し、前回の停止判定により走行状態であると判定された場合であって前記加速度のばらつき度合いが所定の走行中閾値以下である場合に停止状態であると判定し、それ以外の場合には前回の停止判定結果と同じ状態であると判定する第2の手法、
または、前記第1の手法若しくは前記第2の手法において、前記加速度のばらつき度合いは、前記加速度の分散とする第3の手法で補正した速度であること
を特徴とする加速度を利用した処理装置。
【請求項3】
請求項1または2に記載の加速度利用装置において、
前記加速度センサから得た加速度は、HPFを通して補正した加速度であること
を特徴とする加速度を利用した処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−227019(P2006−227019A)
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願番号】特願2006−83375(P2006−83375)
【出願日】平成18年3月24日(2006.3.24)
【分割の表示】特願2000−220759(P2000−220759)の分割
【原出願日】平成12年7月21日(2000.7.21)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年8月31日(2006.8.31)
【国際特許分類】
【出願日】平成18年3月24日(2006.3.24)
【分割の表示】特願2000−220759(P2000−220759)の分割
【原出願日】平成12年7月21日(2000.7.21)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]