
加速度センサ及び地磁気センサを用いて打撃前の構え姿勢を検出する携帯端末、プログラム及び方法
【課題】プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、正確な打撃時点を検出することができる携帯端末等を提供する。
【解決手段】加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、2つの地磁気ベクトルの成す角の変化に応じてフルスイング開始時点を検出するフルスイング時点検出手段と、フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段とを有する。
【解決手段】加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、2つの地磁気ベクトルの成す角の変化に応じてフルスイング開始時点を検出するフルスイング時点検出手段と、フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯端末によって、ゴルフの打数をカウントする技術に関する。
【背景技術】
【0002】
従来、ゴルフ競技における打数は、プレーヤ自身がスコアシートに手書きによって記録されている。打数のカウント自体はプレーヤ自身に任されているために、特に、ゴルフの経験が浅いプレーヤほど、カウント忘れや、スコアシートへの記入ミスを生じることも多い。
【0003】
これに対し、ゴルフの打数を自動的にカウントする打数カウンタ装置の技術がある(例えば特許文献1参照)。この打数カウンタ装置は、リストバンド状の筐体であって、プレーヤ自身の手首に装着される。また、この装置は、加速度センサを搭載し、プレーヤがゴルフクラブを振り下ろす際に生じる大きな加速度を検出することができる。そして、加速度が所定値以上に達した回数を、その打数としてカウントする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−222820号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ゴルフプレーヤは、実際にボールを打つ以外に、通常、何回も素振りをする。単純に所定値以上の加速度をカウントしただけでは、実際の打数より多くの打数をカウントすることとなる。
【0006】
また、ゴルフプレーヤは、クラブを、ティーショットのように大きく振る場合もあれば、パッティングのように小さく振る場合もある。パッティングの場合、加速度センサによって検出される加速度の変化も小さくなり、1打をカウントすることが難しい。また、センサとして地磁気センサを用いることもできるが、その地磁気の変化で打撃時点を検出することは更に難しい。
【0007】
そこで、本発明は、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、正確な打撃時点を検出することができる携帯端末、プログラム及び方法を提供することを目的とする。結果的に、正確な打数をカウントすることができる。
【課題を解決するための手段】
【0008】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打撃を検出する携帯端末であって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
を有することを特徴とする。
【0009】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、検出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出することも好ましい。
【0010】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
ことも好ましい。
【0011】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
ことも好ましい。
【0012】
本発明の携帯端末における他の実施形態によれば、
ユーザに右利き又は左利きかを選択的に入力させ、
フルスイング時点検出手段について、
右利きのスイングによって描かれる水平方向成分における円弧の第1の方向によって、重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)として検出され、
左利きのスイングによって描かれる水平方向成分における円弧の第2の方向によって、重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)として検出され、
ユーザが右利きである場合、重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出し、
ユーザが左利きである場合、重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する
ことも好ましい。
【0013】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出することも好ましい。
【0014】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、フルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する
ことも好ましい。
【0015】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、フルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
ことも好ましい。
【0016】
本発明の携帯端末における他の実施形態によれば、
姿勢推定手段は、フルスイング開始時点から前の一定の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「構え姿勢」として推定する
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
ことも好ましい。
【0017】
本発明の携帯端末における他の実施形態によれば、
姿勢推定手段は、フルスイング開始時点以外の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「立ち姿勢」として推定する
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
ことも好ましい。
【0018】
本発明の携帯端末における他の実施形態によれば、
移動時間区間を除く移動時間区間同士の間で1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する打撃検出手段と、
検出された打撃の回数をカウントする打数計数手段と
を更に有することも好ましい。
【0019】
本発明の携帯端末における他の実施形態によれば、
鉛直方向加速度算出手段は、
予め、加速度センサから出力された3軸の加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておき、
加速度センサから出力された3軸の加速度ベクトル及び鉛直下向き単位ベクトルeDownに基づいて鉛直方向加速度を算出することも好ましい。
【0020】
本発明の携帯端末における他の実施形態によれば、
測位電波を受信する測位手段と、
測位手段に対して測位時点を制御する測位制御手段と
を更に有し、
測位制御手段は、
移動時間区間同士の間で1回以上、測位手段に対して測位をするべく指示し、
打撃検出手段によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付け、
打撃識別子及び位置情報を、表示制御手段へ出力する
ことも好ましい。
【0021】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打数をカウントする携帯端末に搭載されたコンピュータを機能させるプログラムであって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
してコンピュータを機能させることを特徴とする。
【0022】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを有する携帯端末を用いて、ボールの打数をカウントする方法であって、
加速度ベクトルから、鉛直方向加速度を算出する第1のステップと、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する第2のステップと、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する第3のステップと、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する第4のステップと、
構え姿勢における加速度ベクトルの集合を蓄積する第5のステップと、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する第6のステップと
を有することを特徴とする。
【発明の効果】
【0023】
本発明の携帯端末、プログラム及び方法によれば、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、正確な打撃時点を検出することができる。結果的に、正確な打数をカウントすることができる。
【図面の簡単な説明】
【0024】
【図1】ゴルフプレーヤに所持された携帯端末とその移動軌跡を表す説明図である。
【図2】S1の経過時間に応じた加速度を表す第1のグラフである。
【図3】S2の経過時間に応じた加速度を表す第2のグラフである。
【図4】最後のS4の経過時間に応じた加速度を表す第3のグラフである。
【図5】本発明における携帯端末の機能構成図である。
【図6】経過時間に応じた軸毎の加速度のグラフである。
【図7】経過時間に応じた鉛直方向加速度のグラフである。
【図8】プレーヤの「構え姿勢」から「打撃」までの各軸の加速度を表すグラフである。
【図9】プレーヤの「構え姿勢」の加速度ベクトルの集合と、「立ち姿勢」の加速度ベクトルの集合とを表すグラフである。
【図10】クラブをフルスイングしたときの地磁気ベクトルのグラフである。
【図11】図10に基づく地磁気ベクトルについて、時間経過に対する成す角cos値の変化を表すグラフである。
【図12】水平方向成分の回転方向に対する重力方向成分を表す説明図である。
【図13】水平方向成分の回転方向が表されている。
【図14】フルスイング開始時点の前の「構え姿勢」「立ち姿勢」「座り姿勢」を表す説明図である。
【図15】1ホールでプレーした際に、携帯端末のディスプレイに表示される画面推移図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。
【0026】
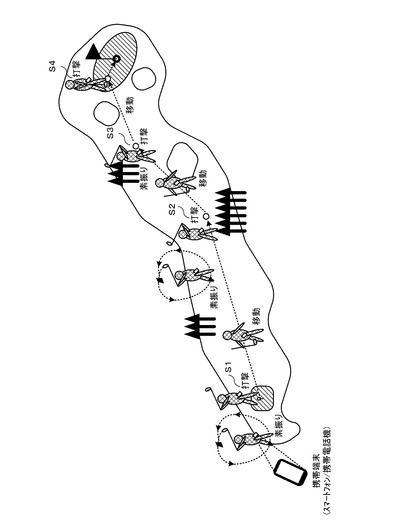
図1は、ゴルフプレーヤに所持された携帯端末とその移動軌跡を表す説明図である。
【0027】
ゴルフ競技とは、プレーヤが、クラブを用いて静止したボールを打ち、グリーン上のカップにボールを入れることを競う。
(S1)プレーヤは、ホール毎に、最初に、クラブを持って素振りをする。そして、第1打目として、打ち出し地点であるティーインググラウンドからティーショットを行う。
(S2)次に、プレーヤは、そのボールが止まった位置まで歩行移動し、第2打目のショットを行う。
(S3)更に、プレーヤは、再び、ボールが止まった位置まで歩行移動し、第3打目のショットを行う。
(S4)最後に、プレーヤは、グリーン上でカップに、パッティングを行う。そして、ホール毎に、ボールを打った打数をカウントする。結果的に、その打数の合計値を競うこととなる。
【0028】
図1によれば、プレーヤは、携帯端末1を所持している。携帯端末1は、携帯電話機やスマートフォンであるのが好ましい。プレーヤは、携帯端末1を衣服のポケットに入れた状態で、ボールを打つ。例えば一般的にスコアカードを入れるズボンの後ろポケットに、携帯端末1を入れることによって、比較的プレーに違和感を生じないと思われる。
【0029】
また、携帯端末1は、加速度センサを内蔵している。プレーヤの身体の揺れは、携帯端末1の加速度センサによって加速度ベクトルとして検出される。
【0030】
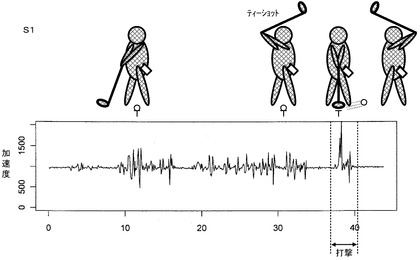
図2は、S1の経過時間に応じた加速度を表す第1のグラフである。
【0031】
図2のグラフによれば、横軸が経過時間であり、縦軸が加速度である。図2のグラフによれば、プレーヤが、打ち出し地点であるティーインググラウンドにあって、静止したボールを打つべく構えてから、打撃するまでの経過時間が表されている。ここで、打撃時には、大きな加速度が検出されることが理解できる。従って、所定値以上の加速度を検出することによって打数をカウントすることができる(例えば特許文献1参照)。
【0032】
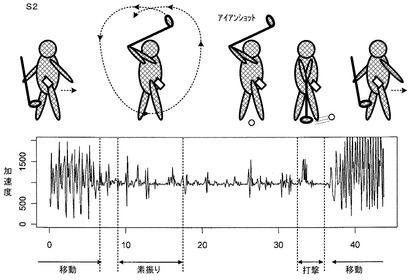
図3は、S2の経過時間に応じた加速度を表す第2のグラフである。
【0033】
図3のグラフによれば、プレーヤが、「歩行移動」し、ボールの近くで「素振り」をし、静止したボールを打つべく構えてから、「打撃」するまでの経過時間が表されている。ここで、歩行移動中や素振り中にも、大きな加速度が検出されていることが理解できる。従って、所定値以上の加速度を検出するだけで、打数をカウントすることは適切でないことが理解できる。また、図3のグラフによれば、図2のグラフの場合に比べて、打撃時の加速度が小さい。
【0034】
図4は、最後のS4の経過時間に応じた加速度を表す第3のグラフである。
【0035】
図4のグラフによれば、図3のグラフの場合に比べて、打撃時の加速度が更に小さい。グリーン上のカップに近い位置に行くほど、打撃によって検出される加速度は小さくなる。これは、プレーヤは、グリーン上でのパッティングにおいては、クラブを振り上げ、振り下ろすのではなく、クラブをまっすぐ後ろに動かし、前に動かすことに基づく。これらの点からも、所定値以上の加速度を検出するだけでは、打撃のみを検出することも難しいことが理解できる。
【0036】
図1〜図4で明らかになった点として、プレーヤは必ず、
「ボールの静止地点まで移動してからボールを打つ」、
即ち(条件1)「ボールの静止地点への移動中にはボールを打たない」
ということである。
また、プレーヤは必ず、
「ボールを打ったらボールの静止地点まで移動する」、
即ち(条件2)「同じ地点で2度続けてボールを打たない」
ということである。
そうすると、
「1回の打撃に係る時間区間は必ず、移動時間区間と移動時間区間とに挟まれる」
ことが理解できる。
即ち、所定値以上の加速度が複数回検出されたとしても、移動時間区間と移動時間区間との間に挟まれている間は、回数を「1」とカウントすることによって、正確な打数をカウントすることができる。
【0037】
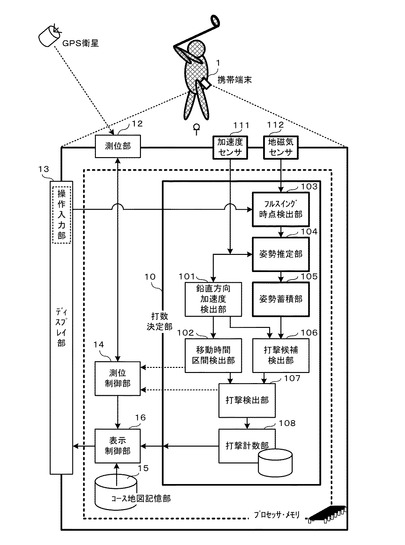
図5は、本発明における携帯端末の機能構成図である。
【0038】
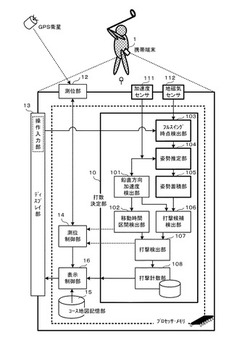
図5によれば、携帯端末1は、ゴルフのプレー中に所持可能な程度の大きさであって、例えば携帯電話機又はスマートフォンである。携帯端末1は、打数決定部10と、加速度センサ111と、地磁気センサ112と、測位部12と、ディスプレイ部13と、測位制御部14と、コース地図記憶部15、表示制御部16とを有する。打数決定部10と、測位制御部14と、コース地図記憶部15と、表示制御部16とは、携帯端末に搭載されたコンピュータを機能させるプログラムを実行することによって実現される。
【0039】
加速度センサ111は、x軸、y軸及びz軸毎の加速度(センサ座標系)を検出する。既存の一般的な携帯電話機やスマートフォンの場合、加速度センサを予め搭載しているものも多い。
【0040】
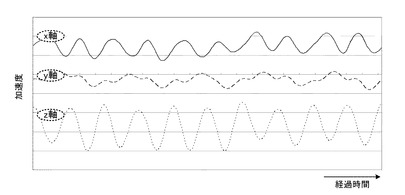
図6は、経過時間に応じた軸毎の加速度のグラフである。
【0041】
図6によれば、歩行者が、携帯端末を手持ちし、そのディスプレイ部を視認しながら歩行した場合に、加速度センサによって得られた軸毎の加速度が表されている。検出された加速度ベクトルは、打数決定部10へ出力される。
【0042】
地磁気センサ112は、南から北へ向かう地球の磁力線である地磁気を検出する。検出された地磁気の水平面に対する正射影の向きが、「北」となる。3軸の地磁気センサの場合、水平でなくても傾きを検出することによって、方位を検出することができる。検出された地磁気ベクトルは、打数決定部10へ出力される。
【0043】
測位部12は、GPS(Global Positioning System)衛星からの測位電波を受信し、現在位置の緯度経度データを取得する。測位部12の測位時点は、測位制御部14によって制御される。測位された緯度経度データは、測位制御部14へ出力される。
【0044】
測位制御部14は、移動時間区間同士の間で1回以上、測位部12に対して測位をするべく指示する。例えば「移動時間区間の終了」と判定された時点であってもよい。そして、測位制御部14は、打撃検出部107によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付ける。そして、打撃識別子及び位置情報を、表示制御部16へ出力する。これによって、打撃時点における大まかな位置を特定することができる。
【0045】
コース地図記憶部15は、ゴルフコースの地図情報を蓄積する。表示制御部16から指示された現在位置に基づいて、そのコース地図情報を表示制御部16へ出力する。
【0046】
表示制御部16は、測位制御部14から現在位置情報を入力する。また、表示制御部16は、現在位置情報をコース地図記憶部15へ出力し、現在位置のコース地図情報を取得する。そして、表示制御部16は、地図の上に現在位置を表示すると共に、打数決定部10から出力された打数を表示する。また、地図の上に現在位置だけでなく、過去にボールを打った位置を表示することもできる。それら画像は、ディスプレイ部13へ出力される。
【0047】
ディスプレイ部13は、表示制御部16からの画像を表示する。プレーヤは、携帯端末1のディスプレイ部13を視認することによって、現在位置や打数を把握することができる。
【0048】
打数決定部10は、鉛直方向加速度算出部101と、移動時間区間検出部102と、フルスイング時点検出部103と、姿勢推定部104と、姿勢蓄積部105と、打撃候補検出部106と、打撃検出部107と、打数計数部108とを有する。以下では、これら機能構成部について、詳細に説明する。
【0049】
[鉛直方向加速度算出部101]
鉛直方向加速度算出部101は、加速度ベクトルを用いて鉛直方向加速度を算出する。尚、鉛直方向加速度と水平方向加速度とは、互いに直交する。
【0050】
図7は、経過時間に応じた鉛直方向加速度のグラフである。
【0051】
図7によれば、鉛直方向加速度の上側は、鉛直下向きを表し、下側は、鉛直上向きを表す。また、鉛直方向加速度の変化は、歩行と一致する周期性を有する。ここで、鉛直下向き加速度の極大点は、身体が下がった時点、即ち、地面を離れていた足が接地する時点を表す。一方で、鉛直上向き加速度の極大点は、身体が上がった時点、即ち、足が上がった時点を表す。また、鉛直下向き加速度の極小点間、即ち、鉛直上向き加速度の極大点間は、プレーヤの一歩を表す。
【0052】
最初に、加速度センサから出力された軸毎の加速度に基づいて、重力ベクトルGを算出する。尚、重力そのものを検出することができるわけではない。
【0053】
重力ベクトルGは、x軸、y軸及びz軸毎に、以下のように表される。
重力ベクトルG :G=(gx、gy、gz)
【0054】
最初に、重力ベクトルGを算出する。歩行時における携帯端末の重力方向は、加速度ベクトルを用いても、歩行毎に正確に決定することは困難である。そこで、所定時間範囲に検出された多数のx軸、y軸及びz軸の加速度を用いて、これら各軸の加速度の和のベクトルの向きを、重力方向とみなす。
【0055】
i番目の各軸の加速度を、以下のように表す。
x軸の加速度:ACCx[i]
y軸の加速度:ACCy[i]
z軸の加速度:ACCz[i]
n個の加速度の和は、以下のように表される。
ACCSx=Σi=1NACCx[i]
ACCSy=Σi=1NACCy[i]
ACCSz=Σi=1NACCz[i]
重力ベクトルGは、以下のように表される。
G=(gx、gy、gz)=(ACCSx、ACCSy、ACCSz)
【0056】
次に、下向き単位ベクトルは、以下のように表される。
下向き単位ベクトルeDown :eDown =(eDx、eDy、eDz)
また、加速度ベクトルは、以下のように表される。
A=(Ax、Ay、Az)
【0057】
重力ベクトルGとした場合、各単位ベクトルは、以下のように表される。
下向き単位ベクトルeDown :eDown =G/|G|
【0058】
そして、各向きの加速度ベクトルは、各向きの単位ベクトルeに対して加速度ベクトルAの内積をとることによって算出される。
鉛直下向き加速度:AD=eDx×Ax+eDy×Ay+eDz×Az
【0059】
このように、鉛直方向加速度算出部101は、予め、加速度センサから出力された加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておく。そして、加速度センサから出力された加速度ベクトル及び鉛直下向き単位ベクトルeDownに基づいて鉛直方向加速度を算出する。
【0060】
[移動時間区間検出部102]
移動時間区間検出部102は、鉛直上向き加速度の極大点(又は鉛直下向き加速度の極小点)を歩行タイミングとして認識する。そして、歩行者の歩行動作によって生じる歩行タイミングを検出する。例えば、図7によれば、鉛直下向き加速度が極小点となる毎に、その歩行タイミングを、移動時間区間検出部102へ出力する。尚、鉛直下向きの加速度の極小点の代わりに、極大点を用いることもできる。
【0061】
歩行タイミングに基づいて、歩行の周期と一致する移動時間区間を複数、検出することができる。歩行移動中における鉛直方向の加速度は、周期性を持つ。従って、その周期性が観測される区間を、歩行移動中として検出することができる。一時的な振動による誤判定を防ぐために、一定数の歩行タイミングが検出された場合に、「歩行による移動時間区間の開始」として判定してもよい。例えば「歩行タイミングが5つ以上連続したら移動時間区間の開始とする」のような判定閾値を設定する。
【0062】
また、一定時間、歩行タイミングが検出されない場合、「移動時間区間の終了」として判定してもよい。一般に、人間の歩行は、120歩/分程度であることが知られている。即ち、歩行タイミングの時間間隔は、0.5秒程度となる。それよりも十分に長い時間歩行タイミングが検出されない場合に、「移動時間区間の終了」と判定する。例えば「1秒間、歩行タイミングが検出されない場合に、移動時間区間の終了とする」のような判定閾値を設定する。
【0063】
図8は、プレーヤの「構え姿勢」から「打撃」までの各軸の加速度を表すグラフである。
【0064】
打撃によって検出される各軸の加速度は、ティーからカップまで、ボールを飛ばす距離や地面の状態によって大きく異なる。図8のグラフによれば、S1(ティーショット)及びS4(パッティング)における「構え」時間の加速度の変化と、「打撃」時間の加速度の変化とが表されている。各軸の加速度は、ローカル座標系によって検出されたものである。ここで、「打撃」時間の加速度の変化について、S1及びS4は大きく異なる。ティーショットでは、加速度の変化が大きいのに対し、パッティングでは、加速度の変化が小さい。
【0065】
ここで、本発明によれば、「構え姿勢」の加速度の変化に注目する。「構え姿勢」の加速度の変化について、S1及びS4の態様が類似する。これは、ボールの位置が体の前になるように足を開いた状態で、ゴルフクラブのフェースが地面の近くになるように構えるため、その姿勢における各軸の加速度の態様が類似することとなる。
【0066】
本発明によれば、加速度ベクトルから直接的に「打撃」を検出するのではなく、その前に生じる「構え姿勢」を検出する。そして、その「構え姿勢」の後に生じる「打撃」時点を検出する。結果的に、携帯端末は、パッティングのような小さい加速度ベクトルの変化であっても1打を検出することができる。
【0067】
図9は、プレーヤの「構え姿勢」の加速度ベクトルの集合と、「立ち姿勢」の加速度ベクトルの集合とを表すグラフである。
【0068】
「構え姿勢」ベクトルPaddressの集合と、「立ち姿勢」ベクトルPstandの集合とをできる限り、正確に収集する必要がある。それら集合のいずれに類似するかによって「構え姿勢」を検出し、後述する打撃検出部104によって打撃が検出されるためである。そのために、フルスイング時点検出部103と、姿勢推定部104と、姿勢蓄積部105とが更に備えられる。
【0069】
[フルスイング時点検出部103]
フルスイング時点検出部103は、ゴルフプレーヤによるティーショットのように、クラブを大きく振った時点を検出する。フルスイング時点検出部103は、地磁気センサ112から地磁気ベクトルMを入力する。そして、第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する。
【0070】
フルスイング時点検出部103は、上式によって算出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合(本発明の関係条件)にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する。ここで抽出されたフルスイング開始時点を、少なくともフルスイング開始時点の候補とすることができる。
【0071】
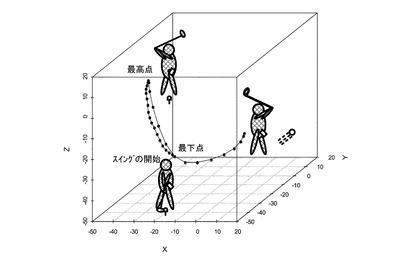
図10は、クラブをフルスイングしたときの地磁気ベクトルのグラフである。
【0072】
図10によれば、ゴルフプレーヤは、スイング開始時点でボールの横にクラブを構え、そのままクラブを後方に最高点(j=j1)まで振り上げ、その後、クラブをボールに向けて振り下ろすことによって、最下点(j=j2)を通過して再び振り上げる(j=j3)。その一連の動作に伴って、携帯端末の姿勢も変化する。従って、観測される地磁気ベクトルも、往路よりも復路の方が長い、一往復の軌跡を描く。
【0073】
図11は、図10に基づく地磁気ベクトルについて、時間経過に対する成す角cos値の変化を表すグラフである。
【0074】
図11によれば、成す角cos値とは、フルスイング開始時点iにおける地磁気ベクトルMiに対する、その後の地磁気ベクトルMjとの間の成す角を表す。スイング開始時点からクラブを後方に最高点(j=j1)まで振り上げると共に、成す角は大きくなる。その後、クラブをボールに向けて振り下ろすことによって、成す角は小さくなる。そして、最下点(j=j2)を通過して再び振り上げる(j=j3)ことによって、成す角は再び大きくなる。
【0075】
また、フルスイング時点検出部103は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出するものであってもよい。
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
【0076】
更に、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出するものであってもよい。
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
【0077】
図12は、水平方向成分の回転方向に対する重力方向成分を表す説明図である。
【0078】
フルスイング検出部13は、ユーザに右利き又は左利きかを選択的に入力させる。例えば、ディスプレイ部13が、ユーザ操作可能なタッチパネルディスプレイである場合、利き手選択ボタンを表示し、ユーザに操作させることができる。この利き手の情報を、フルスイング検出部13へ入力する。
【0079】
図12(a1)によれば、右利きのユーザがクラブを打撃方向へフルスイングしているとする。このとき、水平方向成分に例えば第1の方向(右周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、同一方向として検出される。また、図12(b1)によれば、右利きのユーザがクラブを打撃方向とは逆に体の向きを変えたとする。このとき、水平方向成分に例えば第2の方向(左周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、反対方向として検出される。
【0080】
図12(a2)によれば、左利きのユーザがクラブを打撃方向へフルスイングしているとする。このとき、水平方向成分に例えば第2の方向(左周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、反対方向として検出される。また、図12(b2)によれば、左利きのユーザがクラブを打撃方向とは逆に体の向きを変えたとする。このとき、水平方向成分に例えば第1の方向(右周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、同一方向として検出される。
【0081】
即ち、以下のようにフルスイング開始時点を検出することができる。
(ユーザが右利きである場合)重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出する。
(ユーザが左利きである場合)重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する。
これによって、プレーヤにおけるクラブの右振り又は左振りを区別することもでき、利きのプレーヤの振りと左利きプレーヤの振りとに応じて、フルスイング開始時点を正確に検出することができる。
【0082】
図13は、水平方向成分の回転方向が表されている。
【0083】
図13(a)の水平方向成分によれば、前述の関係条件と同様に、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化している。この場合、フルスイング動作をしたとして、フルスイング開始時点を決定する。
【0084】
一方で、図13(b)の水平方向成分によれば、前述の関係条件が成立しない。ここでは、例えば、プレーヤが、最初にボールの前にクラブを合わせ、少しクラブを引いて、更にボールの前にクラブを合わせたような確認の振りを表している。この場合、関係条件が成立せず、フルスイング動作をしたと判定しない。
【0085】
更に、以下のような実施形態によって、フルスイング開始時点を検出するための精度を高めることができる。
【0086】
(実施形態1)検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出する。即ち、スイング開始時点から終了時点までの時間間隔が長すぎる場合、そのフルスイング開始時点を候補から除外する。その時間間隔とは、ゴルフスイングの場合、2秒程度である。
【0087】
(実施形態2)検出されたフルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する。
即ち、開始点(最下点)から最高点まで振り上げるのに要する時間間隔よりも、最高点から最下点点まで振り下ろすのに要する時間間隔の方が長い場合、そのフルスイング開始時点を候補から除外する。また、開始点(最下点)から最高点まで振り上げるのに要する時間間隔よりも、振り下ろしの後、最下点から最高点までフォローで振り上げるのに要する時間間隔の方が長い場合も同様に、そのフルスイング開始時点を候補から除外する。一般的なゴルフの場合、そのような時間変化は生じないためである。
【0088】
(実施形態3)検出されたフルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
最下点における姿勢(地磁気ベクトルの状態)は、スイングの開始時点における姿勢に近い(似ている)。即ち、スイング開始時点の姿勢と、振り下ろしの最下点の姿勢とが、閾値φ以上相違する場合、そのフルスイング開始時点を候補から除外する。
【0089】
[姿勢推定部104]
姿勢推定部104は、「構え姿勢」ベクトルと「立ち姿勢」ベクトルとを検出し、それらベクトルを姿勢蓄積部105へ出力する。フルスイング開始時点を検出できたとすれば、その前の一定時間範囲に「構え姿勢」が発生していると推定できる。
【0090】
図14は、フルスイング開始時点の前の「構え姿勢」「立ち姿勢」「座り姿勢」を表す説明図である。
【0091】
(1)「構え姿勢」ベクトルの検出
図14によれば、姿勢推定部104は、検出されたフルスイング開始時点から前の一定の時間範囲(例えば1秒)について、「構え姿勢」候補時間とする。図8及び図10からも明らかなとおり、ゴルフの場合、打撃の前に必ず「構え姿勢」時間が生じ、姿勢が安定する。姿勢の安定は、姿勢の変動が閾値以下に収まっている区間をいい、この区間は、加速度の変化が少ない。尚、構え姿勢は、1時点における姿勢とするよりも、区間の姿勢の平均とすることが好ましい。
【0092】
(2)「立ち姿勢」ベクトルの検出
図14によれば、姿勢推定部104は、加速度ベクトルの変動が所定閾値以下であって、且つ、所定時間(例えば10秒)以上継続している区間における加速度ベクトルを、「立ち姿勢」ベクトル候補として検出する。
【0093】
「立ち姿勢」を、以下のいずれかの条件で表すことができる。
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
「立ち姿勢」に向かう最大の力がφ2よりも大きい場合に、「立ち姿勢」と判定される。
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
これは、ゴルフプレーヤが、長時間構えることによって、pst・pの最大値がφ5よりも小さくなっている場合に、「立ち姿勢」が発生していると推定できる。
【0094】
また、図14によれば、以下の条件を満たすことも好ましい。
pw:移動時間区間に検出された姿勢(ベクトル)
pst・pw>φ6 φ6:閾値
これは、ゴルフプレーヤが、座っている場合(立ち姿勢でない場合)、pst・pwがφ6よりも小さくなっている場合に、「座り姿勢」が発生していると推定できる。「立ち姿勢」の加速度ベクトルから、「座り姿勢」の加速度ベクトルを除去する。
【0095】
[姿勢蓄積部105]
姿勢蓄積部105は、「構え姿勢」ベクトルの集合Paddressと、「立ち姿勢」ベクトルPstandの集合とを蓄積する。
【0096】
[打撃候補検出部106]
打撃候補検出部106は、加速度ベクトルの集合から、打撃前にプレーヤがクラブ持って構えている「構え姿勢」ベクトルを検出した際に、打撃候補時点として検出する。これは、各軸の加速度の関係から「構え姿勢」の時点を検出した上でその後の打撃時点を想定することができる。
【0097】
例えば以下のように検出する。
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
【0098】
「構え姿勢」を、以下のいずれかの条件で検出することができる。
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
「構え姿勢」に向かう最大の力がφ1よりも大きい場合に、「構え姿勢」と判定される。
【0099】
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
「構え姿勢」に向かう最大の力がφ3よりも大きく、且つ、「構え姿勢」に向かう最小の力が、「立ち姿勢」に向かう最小の力よりも大きい場合に、「構え姿勢」と判定される。
【0100】
[打撃検出部107]
打撃検出部107は、移動時間区間同士の間で1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する。勿論、打撃候補時点が検出されなければ、0回としてカウントしない。移動時間区間同士の間で打撃候補時点を検出する理由としては、
(条件1)「ボールの静止地点への移動中にはボールを打たない」
ことに基づく。
また、1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する理由としては、
(条件2)「同じ地点で2度続けてボールを打たない」
ことに基づく。
【0101】
[打数計数部108]
打数計数部108は、検出された打撃の回数をカウントし、記録する。また、打数だけでなく時刻や位置もあわせて記録することも好ましい。
【0102】
図15は、1ホールでプレーした際に、携帯端末のディスプレイに表示される画面推移図である。
【0103】
図15によれば、図1に対応付けた画面の推移が表されている(S1〜S4)。S1では、プレーヤは打数カウントをリセットし、第1打を打つ。次に、S2で、プレーヤが第2打を打つ際には、既に打数1がカウントされている。次に、S3で、プレーヤが第3打を打つ際には、既に打数2がカウントされている。次に、S4で、プレーヤが第4打を打つ際には、既に打数3がカウントされている。そして、最終的に、ホールを終了した際には、打数4がカウントされている。
【0104】
以上、詳細に説明したように、本発明の携帯端末、プログラム及び方法によれば、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、できる限り正確に打数を決定することができる。
【0105】
前述した本発明の種々の実施形態について、本発明の技術思想及び見地の範囲の種々の変更、修正及び省略は、当業者によれば容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【符号の説明】
【0106】
1 携帯端末
10 打数決定部
101 鉛直方向加速度算出部
102 移動時間区間検出部
103 フルスイング時点検出部
104 姿勢推定部
105 姿勢蓄積部
106 打撃候補検出部
107 打撃検出部
108 打数計数部
111 加速度センサ
112 地磁気センサ
12 測位部
13 ディスプレイ部
14 測位制御部
15 コース地図記憶部
16 表示制御部
【技術分野】
【0001】
本発明は、携帯端末によって、ゴルフの打数をカウントする技術に関する。
【背景技術】
【0002】
従来、ゴルフ競技における打数は、プレーヤ自身がスコアシートに手書きによって記録されている。打数のカウント自体はプレーヤ自身に任されているために、特に、ゴルフの経験が浅いプレーヤほど、カウント忘れや、スコアシートへの記入ミスを生じることも多い。
【0003】
これに対し、ゴルフの打数を自動的にカウントする打数カウンタ装置の技術がある(例えば特許文献1参照)。この打数カウンタ装置は、リストバンド状の筐体であって、プレーヤ自身の手首に装着される。また、この装置は、加速度センサを搭載し、プレーヤがゴルフクラブを振り下ろす際に生じる大きな加速度を検出することができる。そして、加速度が所定値以上に達した回数を、その打数としてカウントする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−222820号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ゴルフプレーヤは、実際にボールを打つ以外に、通常、何回も素振りをする。単純に所定値以上の加速度をカウントしただけでは、実際の打数より多くの打数をカウントすることとなる。
【0006】
また、ゴルフプレーヤは、クラブを、ティーショットのように大きく振る場合もあれば、パッティングのように小さく振る場合もある。パッティングの場合、加速度センサによって検出される加速度の変化も小さくなり、1打をカウントすることが難しい。また、センサとして地磁気センサを用いることもできるが、その地磁気の変化で打撃時点を検出することは更に難しい。
【0007】
そこで、本発明は、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、正確な打撃時点を検出することができる携帯端末、プログラム及び方法を提供することを目的とする。結果的に、正確な打数をカウントすることができる。
【課題を解決するための手段】
【0008】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打撃を検出する携帯端末であって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
を有することを特徴とする。
【0009】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、検出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出することも好ましい。
【0010】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
ことも好ましい。
【0011】
本発明の携帯端末における他の実施形態によれば、フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
ことも好ましい。
【0012】
本発明の携帯端末における他の実施形態によれば、
ユーザに右利き又は左利きかを選択的に入力させ、
フルスイング時点検出手段について、
右利きのスイングによって描かれる水平方向成分における円弧の第1の方向によって、重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)として検出され、
左利きのスイングによって描かれる水平方向成分における円弧の第2の方向によって、重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)として検出され、
ユーザが右利きである場合、重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出し、
ユーザが左利きである場合、重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する
ことも好ましい。
【0013】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出することも好ましい。
【0014】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、フルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する
ことも好ましい。
【0015】
本発明の携帯端末における他の実施形態によれば、
フルスイング時点検出手段は、フルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
ことも好ましい。
【0016】
本発明の携帯端末における他の実施形態によれば、
姿勢推定手段は、フルスイング開始時点から前の一定の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「構え姿勢」として推定する
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
ことも好ましい。
【0017】
本発明の携帯端末における他の実施形態によれば、
姿勢推定手段は、フルスイング開始時点以外の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「立ち姿勢」として推定する
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
ことも好ましい。
【0018】
本発明の携帯端末における他の実施形態によれば、
移動時間区間を除く移動時間区間同士の間で1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する打撃検出手段と、
検出された打撃の回数をカウントする打数計数手段と
を更に有することも好ましい。
【0019】
本発明の携帯端末における他の実施形態によれば、
鉛直方向加速度算出手段は、
予め、加速度センサから出力された3軸の加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておき、
加速度センサから出力された3軸の加速度ベクトル及び鉛直下向き単位ベクトルeDownに基づいて鉛直方向加速度を算出することも好ましい。
【0020】
本発明の携帯端末における他の実施形態によれば、
測位電波を受信する測位手段と、
測位手段に対して測位時点を制御する測位制御手段と
を更に有し、
測位制御手段は、
移動時間区間同士の間で1回以上、測位手段に対して測位をするべく指示し、
打撃検出手段によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付け、
打撃識別子及び位置情報を、表示制御手段へ出力する
ことも好ましい。
【0021】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打数をカウントする携帯端末に搭載されたコンピュータを機能させるプログラムであって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
してコンピュータを機能させることを特徴とする。
【0022】
本発明によれば、ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを有する携帯端末を用いて、ボールの打数をカウントする方法であって、
加速度ベクトルから、鉛直方向加速度を算出する第1のステップと、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する第2のステップと、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する第3のステップと、
フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する第4のステップと、
構え姿勢における加速度ベクトルの集合を蓄積する第5のステップと、
鉛直方向加速度又は加速度ベクトルの変化と、姿勢蓄積手段に蓄積された構え姿勢の加速度ベクトルとから、打撃候補時点を検出する第6のステップと
を有することを特徴とする。
【発明の効果】
【0023】
本発明の携帯端末、プログラム及び方法によれば、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、正確な打撃時点を検出することができる。結果的に、正確な打数をカウントすることができる。
【図面の簡単な説明】
【0024】
【図1】ゴルフプレーヤに所持された携帯端末とその移動軌跡を表す説明図である。
【図2】S1の経過時間に応じた加速度を表す第1のグラフである。
【図3】S2の経過時間に応じた加速度を表す第2のグラフである。
【図4】最後のS4の経過時間に応じた加速度を表す第3のグラフである。
【図5】本発明における携帯端末の機能構成図である。
【図6】経過時間に応じた軸毎の加速度のグラフである。
【図7】経過時間に応じた鉛直方向加速度のグラフである。
【図8】プレーヤの「構え姿勢」から「打撃」までの各軸の加速度を表すグラフである。
【図9】プレーヤの「構え姿勢」の加速度ベクトルの集合と、「立ち姿勢」の加速度ベクトルの集合とを表すグラフである。
【図10】クラブをフルスイングしたときの地磁気ベクトルのグラフである。
【図11】図10に基づく地磁気ベクトルについて、時間経過に対する成す角cos値の変化を表すグラフである。
【図12】水平方向成分の回転方向に対する重力方向成分を表す説明図である。
【図13】水平方向成分の回転方向が表されている。
【図14】フルスイング開始時点の前の「構え姿勢」「立ち姿勢」「座り姿勢」を表す説明図である。
【図15】1ホールでプレーした際に、携帯端末のディスプレイに表示される画面推移図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。
【0026】
図1は、ゴルフプレーヤに所持された携帯端末とその移動軌跡を表す説明図である。
【0027】
ゴルフ競技とは、プレーヤが、クラブを用いて静止したボールを打ち、グリーン上のカップにボールを入れることを競う。
(S1)プレーヤは、ホール毎に、最初に、クラブを持って素振りをする。そして、第1打目として、打ち出し地点であるティーインググラウンドからティーショットを行う。
(S2)次に、プレーヤは、そのボールが止まった位置まで歩行移動し、第2打目のショットを行う。
(S3)更に、プレーヤは、再び、ボールが止まった位置まで歩行移動し、第3打目のショットを行う。
(S4)最後に、プレーヤは、グリーン上でカップに、パッティングを行う。そして、ホール毎に、ボールを打った打数をカウントする。結果的に、その打数の合計値を競うこととなる。
【0028】
図1によれば、プレーヤは、携帯端末1を所持している。携帯端末1は、携帯電話機やスマートフォンであるのが好ましい。プレーヤは、携帯端末1を衣服のポケットに入れた状態で、ボールを打つ。例えば一般的にスコアカードを入れるズボンの後ろポケットに、携帯端末1を入れることによって、比較的プレーに違和感を生じないと思われる。
【0029】
また、携帯端末1は、加速度センサを内蔵している。プレーヤの身体の揺れは、携帯端末1の加速度センサによって加速度ベクトルとして検出される。
【0030】
図2は、S1の経過時間に応じた加速度を表す第1のグラフである。
【0031】
図2のグラフによれば、横軸が経過時間であり、縦軸が加速度である。図2のグラフによれば、プレーヤが、打ち出し地点であるティーインググラウンドにあって、静止したボールを打つべく構えてから、打撃するまでの経過時間が表されている。ここで、打撃時には、大きな加速度が検出されることが理解できる。従って、所定値以上の加速度を検出することによって打数をカウントすることができる(例えば特許文献1参照)。
【0032】
図3は、S2の経過時間に応じた加速度を表す第2のグラフである。
【0033】
図3のグラフによれば、プレーヤが、「歩行移動」し、ボールの近くで「素振り」をし、静止したボールを打つべく構えてから、「打撃」するまでの経過時間が表されている。ここで、歩行移動中や素振り中にも、大きな加速度が検出されていることが理解できる。従って、所定値以上の加速度を検出するだけで、打数をカウントすることは適切でないことが理解できる。また、図3のグラフによれば、図2のグラフの場合に比べて、打撃時の加速度が小さい。
【0034】
図4は、最後のS4の経過時間に応じた加速度を表す第3のグラフである。
【0035】
図4のグラフによれば、図3のグラフの場合に比べて、打撃時の加速度が更に小さい。グリーン上のカップに近い位置に行くほど、打撃によって検出される加速度は小さくなる。これは、プレーヤは、グリーン上でのパッティングにおいては、クラブを振り上げ、振り下ろすのではなく、クラブをまっすぐ後ろに動かし、前に動かすことに基づく。これらの点からも、所定値以上の加速度を検出するだけでは、打撃のみを検出することも難しいことが理解できる。
【0036】
図1〜図4で明らかになった点として、プレーヤは必ず、
「ボールの静止地点まで移動してからボールを打つ」、
即ち(条件1)「ボールの静止地点への移動中にはボールを打たない」
ということである。
また、プレーヤは必ず、
「ボールを打ったらボールの静止地点まで移動する」、
即ち(条件2)「同じ地点で2度続けてボールを打たない」
ということである。
そうすると、
「1回の打撃に係る時間区間は必ず、移動時間区間と移動時間区間とに挟まれる」
ことが理解できる。
即ち、所定値以上の加速度が複数回検出されたとしても、移動時間区間と移動時間区間との間に挟まれている間は、回数を「1」とカウントすることによって、正確な打数をカウントすることができる。
【0037】
図5は、本発明における携帯端末の機能構成図である。
【0038】
図5によれば、携帯端末1は、ゴルフのプレー中に所持可能な程度の大きさであって、例えば携帯電話機又はスマートフォンである。携帯端末1は、打数決定部10と、加速度センサ111と、地磁気センサ112と、測位部12と、ディスプレイ部13と、測位制御部14と、コース地図記憶部15、表示制御部16とを有する。打数決定部10と、測位制御部14と、コース地図記憶部15と、表示制御部16とは、携帯端末に搭載されたコンピュータを機能させるプログラムを実行することによって実現される。
【0039】
加速度センサ111は、x軸、y軸及びz軸毎の加速度(センサ座標系)を検出する。既存の一般的な携帯電話機やスマートフォンの場合、加速度センサを予め搭載しているものも多い。
【0040】
図6は、経過時間に応じた軸毎の加速度のグラフである。
【0041】
図6によれば、歩行者が、携帯端末を手持ちし、そのディスプレイ部を視認しながら歩行した場合に、加速度センサによって得られた軸毎の加速度が表されている。検出された加速度ベクトルは、打数決定部10へ出力される。
【0042】
地磁気センサ112は、南から北へ向かう地球の磁力線である地磁気を検出する。検出された地磁気の水平面に対する正射影の向きが、「北」となる。3軸の地磁気センサの場合、水平でなくても傾きを検出することによって、方位を検出することができる。検出された地磁気ベクトルは、打数決定部10へ出力される。
【0043】
測位部12は、GPS(Global Positioning System)衛星からの測位電波を受信し、現在位置の緯度経度データを取得する。測位部12の測位時点は、測位制御部14によって制御される。測位された緯度経度データは、測位制御部14へ出力される。
【0044】
測位制御部14は、移動時間区間同士の間で1回以上、測位部12に対して測位をするべく指示する。例えば「移動時間区間の終了」と判定された時点であってもよい。そして、測位制御部14は、打撃検出部107によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付ける。そして、打撃識別子及び位置情報を、表示制御部16へ出力する。これによって、打撃時点における大まかな位置を特定することができる。
【0045】
コース地図記憶部15は、ゴルフコースの地図情報を蓄積する。表示制御部16から指示された現在位置に基づいて、そのコース地図情報を表示制御部16へ出力する。
【0046】
表示制御部16は、測位制御部14から現在位置情報を入力する。また、表示制御部16は、現在位置情報をコース地図記憶部15へ出力し、現在位置のコース地図情報を取得する。そして、表示制御部16は、地図の上に現在位置を表示すると共に、打数決定部10から出力された打数を表示する。また、地図の上に現在位置だけでなく、過去にボールを打った位置を表示することもできる。それら画像は、ディスプレイ部13へ出力される。
【0047】
ディスプレイ部13は、表示制御部16からの画像を表示する。プレーヤは、携帯端末1のディスプレイ部13を視認することによって、現在位置や打数を把握することができる。
【0048】
打数決定部10は、鉛直方向加速度算出部101と、移動時間区間検出部102と、フルスイング時点検出部103と、姿勢推定部104と、姿勢蓄積部105と、打撃候補検出部106と、打撃検出部107と、打数計数部108とを有する。以下では、これら機能構成部について、詳細に説明する。
【0049】
[鉛直方向加速度算出部101]
鉛直方向加速度算出部101は、加速度ベクトルを用いて鉛直方向加速度を算出する。尚、鉛直方向加速度と水平方向加速度とは、互いに直交する。
【0050】
図7は、経過時間に応じた鉛直方向加速度のグラフである。
【0051】
図7によれば、鉛直方向加速度の上側は、鉛直下向きを表し、下側は、鉛直上向きを表す。また、鉛直方向加速度の変化は、歩行と一致する周期性を有する。ここで、鉛直下向き加速度の極大点は、身体が下がった時点、即ち、地面を離れていた足が接地する時点を表す。一方で、鉛直上向き加速度の極大点は、身体が上がった時点、即ち、足が上がった時点を表す。また、鉛直下向き加速度の極小点間、即ち、鉛直上向き加速度の極大点間は、プレーヤの一歩を表す。
【0052】
最初に、加速度センサから出力された軸毎の加速度に基づいて、重力ベクトルGを算出する。尚、重力そのものを検出することができるわけではない。
【0053】
重力ベクトルGは、x軸、y軸及びz軸毎に、以下のように表される。
重力ベクトルG :G=(gx、gy、gz)
【0054】
最初に、重力ベクトルGを算出する。歩行時における携帯端末の重力方向は、加速度ベクトルを用いても、歩行毎に正確に決定することは困難である。そこで、所定時間範囲に検出された多数のx軸、y軸及びz軸の加速度を用いて、これら各軸の加速度の和のベクトルの向きを、重力方向とみなす。
【0055】
i番目の各軸の加速度を、以下のように表す。
x軸の加速度:ACCx[i]
y軸の加速度:ACCy[i]
z軸の加速度:ACCz[i]
n個の加速度の和は、以下のように表される。
ACCSx=Σi=1NACCx[i]
ACCSy=Σi=1NACCy[i]
ACCSz=Σi=1NACCz[i]
重力ベクトルGは、以下のように表される。
G=(gx、gy、gz)=(ACCSx、ACCSy、ACCSz)
【0056】
次に、下向き単位ベクトルは、以下のように表される。
下向き単位ベクトルeDown :eDown =(eDx、eDy、eDz)
また、加速度ベクトルは、以下のように表される。
A=(Ax、Ay、Az)
【0057】
重力ベクトルGとした場合、各単位ベクトルは、以下のように表される。
下向き単位ベクトルeDown :eDown =G/|G|
【0058】
そして、各向きの加速度ベクトルは、各向きの単位ベクトルeに対して加速度ベクトルAの内積をとることによって算出される。
鉛直下向き加速度:AD=eDx×Ax+eDy×Ay+eDz×Az
【0059】
このように、鉛直方向加速度算出部101は、予め、加速度センサから出力された加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておく。そして、加速度センサから出力された加速度ベクトル及び鉛直下向き単位ベクトルeDownに基づいて鉛直方向加速度を算出する。
【0060】
[移動時間区間検出部102]
移動時間区間検出部102は、鉛直上向き加速度の極大点(又は鉛直下向き加速度の極小点)を歩行タイミングとして認識する。そして、歩行者の歩行動作によって生じる歩行タイミングを検出する。例えば、図7によれば、鉛直下向き加速度が極小点となる毎に、その歩行タイミングを、移動時間区間検出部102へ出力する。尚、鉛直下向きの加速度の極小点の代わりに、極大点を用いることもできる。
【0061】
歩行タイミングに基づいて、歩行の周期と一致する移動時間区間を複数、検出することができる。歩行移動中における鉛直方向の加速度は、周期性を持つ。従って、その周期性が観測される区間を、歩行移動中として検出することができる。一時的な振動による誤判定を防ぐために、一定数の歩行タイミングが検出された場合に、「歩行による移動時間区間の開始」として判定してもよい。例えば「歩行タイミングが5つ以上連続したら移動時間区間の開始とする」のような判定閾値を設定する。
【0062】
また、一定時間、歩行タイミングが検出されない場合、「移動時間区間の終了」として判定してもよい。一般に、人間の歩行は、120歩/分程度であることが知られている。即ち、歩行タイミングの時間間隔は、0.5秒程度となる。それよりも十分に長い時間歩行タイミングが検出されない場合に、「移動時間区間の終了」と判定する。例えば「1秒間、歩行タイミングが検出されない場合に、移動時間区間の終了とする」のような判定閾値を設定する。
【0063】
図8は、プレーヤの「構え姿勢」から「打撃」までの各軸の加速度を表すグラフである。
【0064】
打撃によって検出される各軸の加速度は、ティーからカップまで、ボールを飛ばす距離や地面の状態によって大きく異なる。図8のグラフによれば、S1(ティーショット)及びS4(パッティング)における「構え」時間の加速度の変化と、「打撃」時間の加速度の変化とが表されている。各軸の加速度は、ローカル座標系によって検出されたものである。ここで、「打撃」時間の加速度の変化について、S1及びS4は大きく異なる。ティーショットでは、加速度の変化が大きいのに対し、パッティングでは、加速度の変化が小さい。
【0065】
ここで、本発明によれば、「構え姿勢」の加速度の変化に注目する。「構え姿勢」の加速度の変化について、S1及びS4の態様が類似する。これは、ボールの位置が体の前になるように足を開いた状態で、ゴルフクラブのフェースが地面の近くになるように構えるため、その姿勢における各軸の加速度の態様が類似することとなる。
【0066】
本発明によれば、加速度ベクトルから直接的に「打撃」を検出するのではなく、その前に生じる「構え姿勢」を検出する。そして、その「構え姿勢」の後に生じる「打撃」時点を検出する。結果的に、携帯端末は、パッティングのような小さい加速度ベクトルの変化であっても1打を検出することができる。
【0067】
図9は、プレーヤの「構え姿勢」の加速度ベクトルの集合と、「立ち姿勢」の加速度ベクトルの集合とを表すグラフである。
【0068】
「構え姿勢」ベクトルPaddressの集合と、「立ち姿勢」ベクトルPstandの集合とをできる限り、正確に収集する必要がある。それら集合のいずれに類似するかによって「構え姿勢」を検出し、後述する打撃検出部104によって打撃が検出されるためである。そのために、フルスイング時点検出部103と、姿勢推定部104と、姿勢蓄積部105とが更に備えられる。
【0069】
[フルスイング時点検出部103]
フルスイング時点検出部103は、ゴルフプレーヤによるティーショットのように、クラブを大きく振った時点を検出する。フルスイング時点検出部103は、地磁気センサ112から地磁気ベクトルMを入力する。そして、第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する。
【0070】
フルスイング時点検出部103は、上式によって算出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合(本発明の関係条件)にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する。ここで抽出されたフルスイング開始時点を、少なくともフルスイング開始時点の候補とすることができる。
【0071】
図10は、クラブをフルスイングしたときの地磁気ベクトルのグラフである。
【0072】
図10によれば、ゴルフプレーヤは、スイング開始時点でボールの横にクラブを構え、そのままクラブを後方に最高点(j=j1)まで振り上げ、その後、クラブをボールに向けて振り下ろすことによって、最下点(j=j2)を通過して再び振り上げる(j=j3)。その一連の動作に伴って、携帯端末の姿勢も変化する。従って、観測される地磁気ベクトルも、往路よりも復路の方が長い、一往復の軌跡を描く。
【0073】
図11は、図10に基づく地磁気ベクトルについて、時間経過に対する成す角cos値の変化を表すグラフである。
【0074】
図11によれば、成す角cos値とは、フルスイング開始時点iにおける地磁気ベクトルMiに対する、その後の地磁気ベクトルMjとの間の成す角を表す。スイング開始時点からクラブを後方に最高点(j=j1)まで振り上げると共に、成す角は大きくなる。その後、クラブをボールに向けて振り下ろすことによって、成す角は小さくなる。そして、最下点(j=j2)を通過して再び振り上げる(j=j3)ことによって、成す角は再び大きくなる。
【0075】
また、フルスイング時点検出部103は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出するものであってもよい。
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
【0076】
更に、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出するものであってもよい。
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
【0077】
図12は、水平方向成分の回転方向に対する重力方向成分を表す説明図である。
【0078】
フルスイング検出部13は、ユーザに右利き又は左利きかを選択的に入力させる。例えば、ディスプレイ部13が、ユーザ操作可能なタッチパネルディスプレイである場合、利き手選択ボタンを表示し、ユーザに操作させることができる。この利き手の情報を、フルスイング検出部13へ入力する。
【0079】
図12(a1)によれば、右利きのユーザがクラブを打撃方向へフルスイングしているとする。このとき、水平方向成分に例えば第1の方向(右周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、同一方向として検出される。また、図12(b1)によれば、右利きのユーザがクラブを打撃方向とは逆に体の向きを変えたとする。このとき、水平方向成分に例えば第2の方向(左周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、反対方向として検出される。
【0080】
図12(a2)によれば、左利きのユーザがクラブを打撃方向へフルスイングしているとする。このとき、水平方向成分に例えば第2の方向(左周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、反対方向として検出される。また、図12(b2)によれば、左利きのユーザがクラブを打撃方向とは逆に体の向きを変えたとする。このとき、水平方向成分に例えば第1の方向(右周り)の円弧が描かれる。このとき、重力方向成分Gの向きと外積Opの向きとは、同一方向として検出される。
【0081】
即ち、以下のようにフルスイング開始時点を検出することができる。
(ユーザが右利きである場合)重力方向成分Gの向きと外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出する。
(ユーザが左利きである場合)重力方向成分Gの向きと外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する。
これによって、プレーヤにおけるクラブの右振り又は左振りを区別することもでき、利きのプレーヤの振りと左利きプレーヤの振りとに応じて、フルスイング開始時点を正確に検出することができる。
【0082】
図13は、水平方向成分の回転方向が表されている。
【0083】
図13(a)の水平方向成分によれば、前述の関係条件と同様に、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化している。この場合、フルスイング動作をしたとして、フルスイング開始時点を決定する。
【0084】
一方で、図13(b)の水平方向成分によれば、前述の関係条件が成立しない。ここでは、例えば、プレーヤが、最初にボールの前にクラブを合わせ、少しクラブを引いて、更にボールの前にクラブを合わせたような確認の振りを表している。この場合、関係条件が成立せず、フルスイング動作をしたと判定しない。
【0085】
更に、以下のような実施形態によって、フルスイング開始時点を検出するための精度を高めることができる。
【0086】
(実施形態1)検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出する。即ち、スイング開始時点から終了時点までの時間間隔が長すぎる場合、そのフルスイング開始時点を候補から除外する。その時間間隔とは、ゴルフスイングの場合、2秒程度である。
【0087】
(実施形態2)検出されたフルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する。
即ち、開始点(最下点)から最高点まで振り上げるのに要する時間間隔よりも、最高点から最下点点まで振り下ろすのに要する時間間隔の方が長い場合、そのフルスイング開始時点を候補から除外する。また、開始点(最下点)から最高点まで振り上げるのに要する時間間隔よりも、振り下ろしの後、最下点から最高点までフォローで振り上げるのに要する時間間隔の方が長い場合も同様に、そのフルスイング開始時点を候補から除外する。一般的なゴルフの場合、そのような時間変化は生じないためである。
【0088】
(実施形態3)検出されたフルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
最下点における姿勢(地磁気ベクトルの状態)は、スイングの開始時点における姿勢に近い(似ている)。即ち、スイング開始時点の姿勢と、振り下ろしの最下点の姿勢とが、閾値φ以上相違する場合、そのフルスイング開始時点を候補から除外する。
【0089】
[姿勢推定部104]
姿勢推定部104は、「構え姿勢」ベクトルと「立ち姿勢」ベクトルとを検出し、それらベクトルを姿勢蓄積部105へ出力する。フルスイング開始時点を検出できたとすれば、その前の一定時間範囲に「構え姿勢」が発生していると推定できる。
【0090】
図14は、フルスイング開始時点の前の「構え姿勢」「立ち姿勢」「座り姿勢」を表す説明図である。
【0091】
(1)「構え姿勢」ベクトルの検出
図14によれば、姿勢推定部104は、検出されたフルスイング開始時点から前の一定の時間範囲(例えば1秒)について、「構え姿勢」候補時間とする。図8及び図10からも明らかなとおり、ゴルフの場合、打撃の前に必ず「構え姿勢」時間が生じ、姿勢が安定する。姿勢の安定は、姿勢の変動が閾値以下に収まっている区間をいい、この区間は、加速度の変化が少ない。尚、構え姿勢は、1時点における姿勢とするよりも、区間の姿勢の平均とすることが好ましい。
【0092】
(2)「立ち姿勢」ベクトルの検出
図14によれば、姿勢推定部104は、加速度ベクトルの変動が所定閾値以下であって、且つ、所定時間(例えば10秒)以上継続している区間における加速度ベクトルを、「立ち姿勢」ベクトル候補として検出する。
【0093】
「立ち姿勢」を、以下のいずれかの条件で表すことができる。
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
「立ち姿勢」に向かう最大の力がφ2よりも大きい場合に、「立ち姿勢」と判定される。
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
これは、ゴルフプレーヤが、長時間構えることによって、pst・pの最大値がφ5よりも小さくなっている場合に、「立ち姿勢」が発生していると推定できる。
【0094】
また、図14によれば、以下の条件を満たすことも好ましい。
pw:移動時間区間に検出された姿勢(ベクトル)
pst・pw>φ6 φ6:閾値
これは、ゴルフプレーヤが、座っている場合(立ち姿勢でない場合)、pst・pwがφ6よりも小さくなっている場合に、「座り姿勢」が発生していると推定できる。「立ち姿勢」の加速度ベクトルから、「座り姿勢」の加速度ベクトルを除去する。
【0095】
[姿勢蓄積部105]
姿勢蓄積部105は、「構え姿勢」ベクトルの集合Paddressと、「立ち姿勢」ベクトルPstandの集合とを蓄積する。
【0096】
[打撃候補検出部106]
打撃候補検出部106は、加速度ベクトルの集合から、打撃前にプレーヤがクラブ持って構えている「構え姿勢」ベクトルを検出した際に、打撃候補時点として検出する。これは、各軸の加速度の関係から「構え姿勢」の時点を検出した上でその後の打撃時点を想定することができる。
【0097】
例えば以下のように検出する。
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
【0098】
「構え姿勢」を、以下のいずれかの条件で検出することができる。
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
「構え姿勢」に向かう最大の力がφ1よりも大きい場合に、「構え姿勢」と判定される。
【0099】
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
「構え姿勢」に向かう最大の力がφ3よりも大きく、且つ、「構え姿勢」に向かう最小の力が、「立ち姿勢」に向かう最小の力よりも大きい場合に、「構え姿勢」と判定される。
【0100】
[打撃検出部107]
打撃検出部107は、移動時間区間同士の間で1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する。勿論、打撃候補時点が検出されなければ、0回としてカウントしない。移動時間区間同士の間で打撃候補時点を検出する理由としては、
(条件1)「ボールの静止地点への移動中にはボールを打たない」
ことに基づく。
また、1つ以上の打撃候補時点が検出された際に、1回の打撃として検出する理由としては、
(条件2)「同じ地点で2度続けてボールを打たない」
ことに基づく。
【0101】
[打数計数部108]
打数計数部108は、検出された打撃の回数をカウントし、記録する。また、打数だけでなく時刻や位置もあわせて記録することも好ましい。
【0102】
図15は、1ホールでプレーした際に、携帯端末のディスプレイに表示される画面推移図である。
【0103】
図15によれば、図1に対応付けた画面の推移が表されている(S1〜S4)。S1では、プレーヤは打数カウントをリセットし、第1打を打つ。次に、S2で、プレーヤが第2打を打つ際には、既に打数1がカウントされている。次に、S3で、プレーヤが第3打を打つ際には、既に打数2がカウントされている。次に、S4で、プレーヤが第4打を打つ際には、既に打数3がカウントされている。そして、最終的に、ホールを終了した際には、打数4がカウントされている。
【0104】
以上、詳細に説明したように、本発明の携帯端末、プログラム及び方法によれば、プレーヤに所持された携帯端末に搭載された加速度センサ及び地磁気センサを用いて、できる限り正確に打数を決定することができる。
【0105】
前述した本発明の種々の実施形態について、本発明の技術思想及び見地の範囲の種々の変更、修正及び省略は、当業者によれば容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【符号の説明】
【0106】
1 携帯端末
10 打数決定部
101 鉛直方向加速度算出部
102 移動時間区間検出部
103 フルスイング時点検出部
104 姿勢推定部
105 姿勢蓄積部
106 打撃候補検出部
107 打撃検出部
108 打数計数部
111 加速度センサ
112 地磁気センサ
12 測位部
13 ディスプレイ部
14 測位制御部
15 コース地図記憶部
16 表示制御部
【特許請求の範囲】
【請求項1】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打撃を検出する携帯端末であって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
前記構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
を有することを特徴とする携帯端末。
【請求項2】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出することを特徴とする請求項1に記載の携帯端末。
【請求項3】
前記フルスイング時点検出手段は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
ことを特徴とする請求項2に記載の携帯端末。
【請求項4】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
ことを特徴とする請求項1に記載の携帯端末。
【請求項5】
ユーザに右利き又は左利きかを選択的に入力させ、
前記フルスイング時点検出手段について、
右利きのスイングによって描かれる水平方向成分における円弧の第1の方向によって、前記重力方向成分Gの向きと前記外積Opの向きとが同一方向(又は反対方向)として検出され、
左利きのスイングによって描かれる水平方向成分における円弧の第2の方向によって、前記重力方向成分Gの向きと前記外積Opの向きとが反対方向(又は同一方向)として検出され、
ユーザが右利きである場合、前記重力方向成分Gの向きと前記外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出し、
ユーザが左利きである場合、前記重力方向成分Gの向きと前記外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する
ことを特徴とする請求項4に記載の携帯端末。
【請求項6】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出することを特徴とする請求項2又は3に記載の携帯端末。
【請求項7】
前記フルスイング時点検出手段は、前記フルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する
ことを特徴とする請求項2から6のいずれか1項に記載の携帯端末。
【請求項8】
前記フルスイング時点検出手段は、前記フルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
ことを特徴とする請求項2から7のいずれか1項に記載の携帯端末。
【請求項9】
前記姿勢推定手段は、フルスイング開始時点から前の一定の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「構え姿勢」として推定する
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
ことを特徴とする請求項1から8のいずれか1項に記載の携帯端末。
【請求項10】
前記姿勢推定手段は、前記フルスイング開始時点以外の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「立ち姿勢」として推定する
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
ことを特徴とする請求項9に記載の携帯端末。
【請求項11】
移動時間区間を除く移動時間区間同士の間で1つ以上の前記打撃候補時点が検出された際に、1回の打撃として検出する打撃検出手段と、
検出された打撃の回数をカウントする打数計数手段と
を更に有することを特徴とする請求項1から10のいずれか1項に記載の携帯端末。
【請求項12】
前記鉛直方向加速度算出手段は、
予め、前記加速度センサから出力された3軸の加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておき、
前記加速度センサから出力された3軸の加速度ベクトル及び前記鉛直下向き単位ベクトルeDownに基づいて前記鉛直方向加速度を算出する
ことを特徴とする請求項1から11のいずれか1項に記載の携帯端末。
【請求項13】
測位電波を受信する測位手段と、
前記測位手段に対して測位時点を制御する測位制御手段と
を更に有し、
前記測位制御手段は、
前記移動時間区間同士の間で1回以上、前記測位手段に対して測位をするべく指示し、
前記打撃検出手段によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付け、
打撃識別子及び位置情報を、表示制御手段へ出力する
ことを特徴とする請求項1から12のいずれか1項に記載の携帯端末。
【請求項14】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打数をカウントする携帯端末に搭載されたコンピュータを機能させるプログラムであって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
前記構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
してコンピュータを機能させることを特徴とするプログラム。
【請求項15】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを有する携帯端末を用いて、ボールの打数をカウントする方法であって、
加速度ベクトルから、鉛直方向加速度を算出する第1のステップと、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する第2のステップと、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する第3のステップと、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する第4のステップと、
前記構え姿勢における加速度ベクトルの集合を蓄積する第5のステップと、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する第6のステップと
を有することを特徴とする方法。
【請求項1】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打撃を検出する携帯端末であって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
前記構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
を有することを特徴とする携帯端末。
【請求項2】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を候補として、Mi・Mj/|Mi||Mj|が、j=j1で極小(最高点)となり、j=j2で極大(最下点)となり、j=j3でj=j1での値より小さくなる(j1<j2<j3)ように変化した場合にのみ、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出することを特徴とする請求項1に記載の携帯端末。
【請求項3】
前記フルスイング時点検出手段は、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Mi・Mi+1/|Mi||Mi+1|=cosθ < δ0
M:地磁気
i:時点
「・」内積(=|Mi||Mi+1|cosθを表し、Mi+1がMiの方向に向かう力)
δ0:閾値
ことを特徴とする請求項2に記載の携帯端末。
【請求項4】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、以下の条件を満たす際に、第1の地磁気ベクトルMiの時点iをフルスイング開始時点として検出する
Op1=Mhj1×Mhj2 「×」:外積
Op2=Mhj2×Mhj3
Gi・Op1/|Gi||Op1|=Gi・Op2/|Gi||Op2|
Mh:地磁気ベクトルMから、時点iにおける重力方向成分を除去した
水平成分ベクトル
Gi:地磁気ベクトルMの時点iにおける重力方向成分
ことを特徴とする請求項1に記載の携帯端末。
【請求項5】
ユーザに右利き又は左利きかを選択的に入力させ、
前記フルスイング時点検出手段について、
右利きのスイングによって描かれる水平方向成分における円弧の第1の方向によって、前記重力方向成分Gの向きと前記外積Opの向きとが同一方向(又は反対方向)として検出され、
左利きのスイングによって描かれる水平方向成分における円弧の第2の方向によって、前記重力方向成分Gの向きと前記外積Opの向きとが反対方向(又は同一方向)として検出され、
ユーザが右利きである場合、前記重力方向成分Gの向きと前記外積Opの向きとが同一方向(又は反対方向)となった場合に、フルスイング開始時点を検出し、
ユーザが左利きである場合、前記重力方向成分Gの向きと前記外積Opの向きとが反対方向(又は同一方向)となった場合に、フルスイング開始時点を検出する
ことを特徴とする請求項4に記載の携帯端末。
【請求項6】
前記フルスイング時点検出手段は、検出されたフルスイング開始時点を更に候補として、時点iと時点j3との時間差が、閾値φよりも短い場合(j3-i<φ)にのみ、時点iをフルスイング開始時点として検出することを特徴とする請求項2又は3に記載の携帯端末。
【請求項7】
前記フルスイング時点検出手段は、前記フルスイング開始時点を更に候補として、
時点iと時点j1との時間差が、時点j1と時点j2との時間差よりも大きく(j1-i>j2-j1)、且つ、
時点iと時点j1との時間差が、時点j2と時点j3との時間差よりも大きい(j1-i>j3-j2)
場合にのみ、時点iをフルスイング開始時点として検出する
ことを特徴とする請求項2から6のいずれか1項に記載の携帯端末。
【請求項8】
前記フルスイング時点検出手段は、前記フルスイング開始時点を更に候補として、以下の条件を満たす場合にのみ、時点iをフルスイング開始時点として検出する
Mi・Mj2/|Mi||Mj2| > φ φ:閾値
ことを特徴とする請求項2から7のいずれか1項に記載の携帯端末。
【請求項9】
前記姿勢推定手段は、フルスイング開始時点から前の一定の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「構え姿勢」として推定する
Paddress:「構え姿勢」(ベクトル)の集合
Pstand :「立ち姿勢」(ベクトル)の集合
pst :センサによって検出された姿勢(ベクトル)
(例えば下向き単位ベクトルを用いることができる)
pst・p=pstx×px+psty×py+pstz×pz
(「・」は内積であって、pst・pは、pのベクトルに向かう力を表す)
max:最大値
min:最小値
(判定1)maxp∈Paddress(pst・p)>φ1 φ1:閾値
(判定2)maxp∈Paddress(pst・p)>φ3 φ3:閾値
minp∈Paddress(pst・p)>minp∈Pstand(pst・p)
ことを特徴とする請求項1から8のいずれか1項に記載の携帯端末。
【請求項10】
前記姿勢推定手段は、前記フルスイング開始時点以外の時間範囲について、以下のいずれかの条件を満たす加速度ベクトルを「立ち姿勢」として推定する
(判定1)maxp∈Pstand(pst・p)>φ2 φ2:閾値
(判定2)maxp∈Padress(pst・p)<φ5 φ5:閾値
ことを特徴とする請求項9に記載の携帯端末。
【請求項11】
移動時間区間を除く移動時間区間同士の間で1つ以上の前記打撃候補時点が検出された際に、1回の打撃として検出する打撃検出手段と、
検出された打撃の回数をカウントする打数計数手段と
を更に有することを特徴とする請求項1から10のいずれか1項に記載の携帯端末。
【請求項12】
前記鉛直方向加速度算出手段は、
予め、前記加速度センサから出力された3軸の加速度ベクトルに基づいて重力ベクトルGを算出し、G/|G|によって鉛直下向き単位ベクトルeDownを算出しておき、
前記加速度センサから出力された3軸の加速度ベクトル及び前記鉛直下向き単位ベクトルeDownに基づいて前記鉛直方向加速度を算出する
ことを特徴とする請求項1から11のいずれか1項に記載の携帯端末。
【請求項13】
測位電波を受信する測位手段と、
前記測位手段に対して測位時点を制御する測位制御手段と
を更に有し、
前記測位制御手段は、
前記移動時間区間同士の間で1回以上、前記測位手段に対して測位をするべく指示し、
前記打撃検出手段によって1回の打撃が検出された際に、当該打撃を表す識別子に、測位された位置情報を対応付け、
打撃識別子及び位置情報を、表示制御手段へ出力する
ことを特徴とする請求項1から12のいずれか1項に記載の携帯端末。
【請求項14】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを用いてボールの打数をカウントする携帯端末に搭載されたコンピュータを機能させるプログラムであって、
加速度ベクトルから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する移動時間区間検出手段と、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出するフルスイング時点検出手段と、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する姿勢推定手段と、
前記構え姿勢における加速度ベクトルの集合を蓄積する姿勢蓄積手段と、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する打撃候補検出手段と
してコンピュータを機能させることを特徴とするプログラム。
【請求項15】
ゴルフプレーヤによって所持されるべく、加速度センサ及び地磁気センサを有する携帯端末を用いて、ボールの打数をカウントする方法であって、
加速度ベクトルから、鉛直方向加速度を算出する第1のステップと、
鉛直上向き加速度の極大点(又は極小点)を歩行タイミングとして、歩行中の複数の移動時間区間を検出する第2のステップと、
第1の地磁気ベクトルMiとその後の第2の地磁気ベクトルMi+1との成す角の変化に応じて、第1の地磁気ベクトルの時点iをフルスイング開始時点として検出する第3のステップと、
前記フルスイング開始時点より前の一定時間範囲における加速度ベクトルを「構え姿勢」として推定する第4のステップと、
前記構え姿勢における加速度ベクトルの集合を蓄積する第5のステップと、
前記鉛直方向加速度又は前記加速度ベクトルの変化と、前記姿勢蓄積手段に蓄積された前記構え姿勢の加速度ベクトルとから、打撃候補時点を検出する第6のステップと
を有することを特徴とする方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】

【図9】

【図10】
【図11】

【図12】

【図13】

【図14】

【図15】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−111206(P2013−111206A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259672(P2011−259672)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000208891)KDDI株式会社 (2,700)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000208891)KDDI株式会社 (2,700)
[ Back to top ]