
加速度センサ特性評価方法及びプログラム
【課題】センサ主軸の方向を回転行列及びその逆行列を用いて演算し、コスト、測定時間及び測定精度の向上を図る。
【解決手段】加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
【解決手段】加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はたとえば変位測定手段として用いられる加速度センサの特性評価方法及びプログラム、特に、加速度センサのセンサ主軸方向及び感度を同定する特性評価方法及びプログラムに関する。
【背景技術】
【0002】
たとえば3軸加速度センサの校正方法はISO16063(参照:非特許文献1)、ISO5347(参照:非特許文献2)等で定義されているが、これらの方法は加速度センサのパッケージの方向と加速度センサの各軸のセンサ主軸方向とが一致していることが前提となっている。しかしながら、この前提は必ずしも保証されているとは言えない。しかも、上述の校正方法は加速度センサに対して直動方向で加速度を入力するので、この入力加速度を知るには、一般には、変位センサのデータを2回微分するか、あるいは、加速度センサの質量及び力を同時に計測する必要がある。この結果、高精度の校正を実現することは技術的に困難がある。
【0003】
加速度センサ中のある一方向のセンサは、その原理上、基本的にその主軸方向の加速度しか検出できない。しかしながら、実際の加速度センサでは、製造時および取り付け時に生じる方向の誤差があるので、加速度センサのパッケージ方向と各センサ主軸方向とを完全に一致させることは困難である。また、現在広く普及しているマイクロエレクトロメカニカルシステム(MEMS)デバイスの加速度センサにおいても、加速度センサのパッケージ方向と各センサ主軸方向とを高精度に一致させることは容易ではない。この方向の不一致の結果、たとえば、x軸方向のセンサがy軸あるいはz軸方向の加速度を検出してしまうという現象を引き起こす。一般に、このような本来の検出方向でない加速度を検出してしまう度合は横感度と呼ばれ、加速度センサのデータシートに記載されている場合も少なくない。
【0004】
従来の加速度センサ特性評価方法によれば、加速度センサに定義したx軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをx軸方向に正弦波加振してx軸に関する主軸感度Sxxを求め、また、加速度センサに定義したy軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをy軸方向に正弦波加振してx軸に関する横感度Sxyを求め、さらに、加速度センサに定義したz軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをz軸方向に正弦波加振してx軸に関する横感度Sxzを求める。同様にして、並進化速度に関する感度Syx、Syy、Syz、Szx、Szy、Szzを求める。これにより、加速度を正確な三次元ベクトルとして算出できる(参照:特許文献1及び非特許文献3)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】WO2005/095998
【非特許文献】
【0006】
【非特許文献1】ISO 16063-1: Methods for the calibration of vibration and shock transducers Part 1, Basic concepts, 1998
【非特許文献2】ISO 5347: Methods for the calibration of vibration and shock pick-ups, 1993
【非特許文献3】梅田章ほか、“三次元振動発生機とレーザ干渉計による三軸加速度計の三次元加速度計としての校正法に関する研究”、日本機械学会論文集C編、70巻697号、2007、pp.38-45
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の従来の加速度センサ特性評価方法によれば、コスト、測定時間、及び測定精度の点で劣るという課題があった。
【0008】
従って、本発明は慣性モーメント、摩擦力が位相に依存しなくするようにした上に、重量バランスによってどのような位相でも必要トルクが一定となるようにし、加速度センサを外界に対して角度姿勢を保持させた状態で等速円運動を可能にして、微小時間でも、高精度の2軸同時測定を可能にする加速度センサ特性評価装置を用いて、加速度センサのセンサ主軸方向及び感度を同定する。
【課題を解決するための手段】
【0009】
上述の課題を解決するために、本発明に係る加速度センサ特性評価方法は、テーブルと、テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、これら各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置のテーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定する段階と、第1の回転行列を用いて回転固定後にテーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第1の射影方向を演算する段階と、xyz座標系のz軸及びxyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する段階と、xyz座標系の第1の平面を第1の回転行列の逆行列を用いて123座標系の第1の平面に変換する段階と、テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列と異なる第2の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定する段階と、第2の回転行列に用いた回転固定後にテーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第2の射影方向を演算する段階と、xyz座標系のz軸及びxyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する段階と、xyz座標系の第2の平面を第2の回転行列の逆行列を用いて123座標系の第2の平面に変換する段階と、123座標系の第1、第2の平面の交線を加速度センサパッケージの各センサの主軸方向として演算する段階とを具備するものである。また、加速度センサパッケージの各センサの主軸方向の単位ベクトルと等速円運動による入力加速度ベクトルとの内積に応じた各センサからの出力電圧によって各センサの感度を演算する段階を具備する。
【0010】
また、本発明に係る加速度センサ特性評価プログラムは、テーブルと、テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、これら各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置のテーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定した後に、テーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第1の射影方向を演算する手順と、xyz座標系のz軸及びxyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する手順と、xyz座標系の第1の平面を第1の回転行列の逆行列を用いて123座標系の第1の平面に変換する手順と、テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列と異なる第2の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定した後に、テーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第2の射影方向を演算する手順と、xyz座標系のz軸及びxyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する手順と、xyz座標系の第2の平面を第2の回転行列の逆行列を用いて123座標系の第2の平面に変換する手順と、123座標系の第1、第2の平面の交線を加速度センサパッケージの各センサの主軸方向として演算する手順とを具備するものである。また、加速度センサパッケージの各センサの主軸方向の単位ベクトルと等速円運動による入力加速度ベクトルとの内積に応じた各センサからの出力電圧によって各センサの感度を演算する手順を具備する。
【発明の効果】
【0011】
本発明によれば、従来の加速度センサ特性評価方法において用いられた横感度という概念は不要となり、センサ主軸の方向を回転行列及びその逆行列を用いて演算しているので、コスト、測定時間及び測定精度の点で優れている。
【図面の簡単な説明】
【0012】
【図1】本発明に係る加速度センサ特性評価装置を示す図である。
【図2】図1の加速度センサ特性評価装置の詳細を示す斜視図である。
【図3】図2の加速度センサ特性評価装置の部分断面図である。
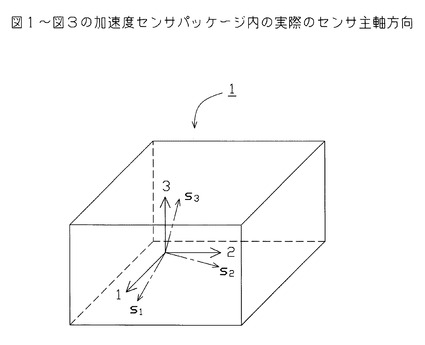
【図4】図1〜図3の加速度センサパッケージ内の実際のセンサ主軸方向を示す斜視図である。
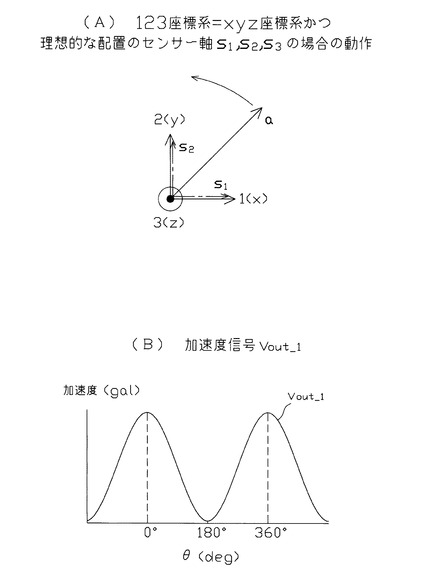
【図5】図1〜図3の加速度センサ特性評価装置において123座標系=xyz座標系かつ理想的な配置のセンサ主軸の場合の動作を説明するもので、(A)はベクトル図、(B)は1軸加速度信号(出力電圧)を示す図である。
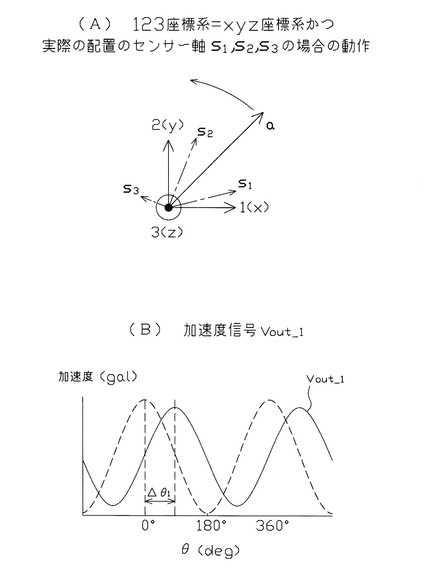
【図6】図1〜図3の加速度センサ特性評価装置において123座標系=xyz座標系かつ実際的な配置のセンサ主軸の場合の動作を説明するもので、(A)はベクトル図、(B)は1軸加速度信号(出力電圧)を示す図である。
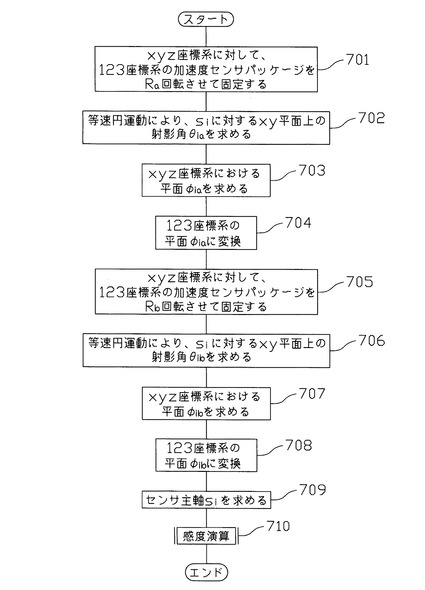
【図7】図1、図2の制御回路の動作を示すフローチャートである。
【図8】図7のフローチャートを補足説明する図である。
【図9】図1〜図3の加速度センサパッケージのセンサ主軸の有意な姿勢を示す図である。
【図10】図7、図8の回転行列Raの一例を示し、(A)はその行列の数値であり、(B)は(A)の回転行列Raで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系を示し、(C)は、Ra回転後の123座標系の実際の加速度センサパッケージを示す写真である。
【図11】図7、図8の回転行列Rbの一例を示し、(A)はその行列の数値であり、(B)は(A)の回転行列Rbで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系の実際の加速度センサパッケージを示す写真である。
【発明を実施するための形態】
【0013】
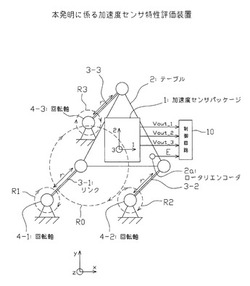
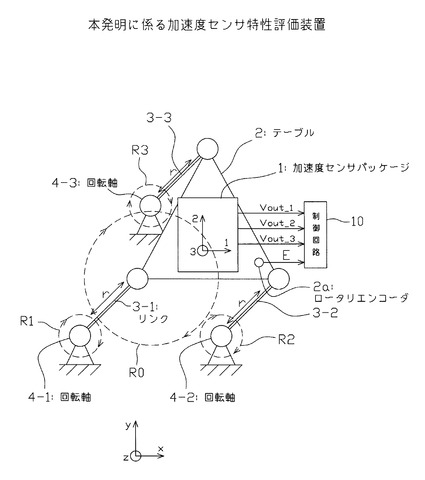
図1は本発明に係る加速度センサ特性評価装置を示す図である。
【0014】
図1に示すように、加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して無限回転可能である。従って、ベアリングの偏り等を無視すれば、テーブル2の慣性モーメント、摩擦力は位相に依存せずに一定となり、テーブル2つまり加速度センサパッケージ1は外界に対して姿勢を保持した状態で、矢印R0に示すごとく、リンク3−1、3−2、3−3の長さrを半径とする完全な等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。この結果、加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
【0015】
加速度センサパッケージ1の正弦波状の1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3はロータリエンコーダ2aの角度信号Eに同期して制御回路(コンピュータ)10に供給され、この結果、制御回路10は1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3から加速度センサパッケージ1のセンサ主軸方向及び感度を演算する。
【0016】
図1においては、加速度センサ特性評価装置の固定部の座標系をxyzとし、その基底ベクトルをベクトルex、ey、ezとする。また、加速度センサパッケージ1の座標系を123とし、その基底ベクトルをベクトルe1、e2、e3とする。尚、ベクトルは、明細書の式及び図面においては、表示「ベクトル」の代りに、太字で表わすものとする。
【0017】
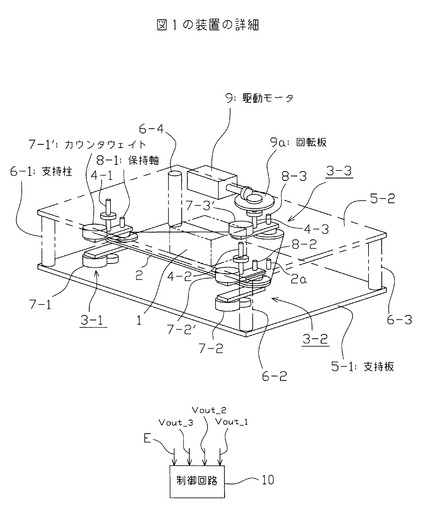
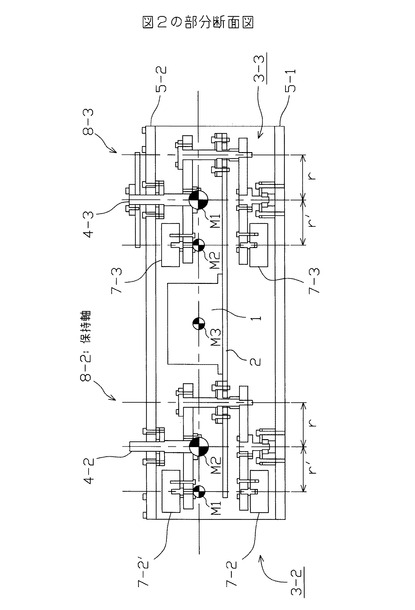
図2は図1の加速度センサ特性評価装置の詳細を示す斜視図、図3は図2の加速度センサ特性評価装置の部分断面図であって、特に、リンク3−2、3−3の断面図を示している。
【0018】
図2、図3に示すように、リンク3−1、3−2、3−3は2つの支持板5−1、5−2の間にねじによって固定されている。また、支持板5−1、5−2は4つの支持柱6−1、6−2、6−3、6−4によって支持されている。各リンク3−1、3−2、3−3は回転軸4−1、4−2、4−3とテーブル2の保持軸8−1、8−2、8−3との距離で表わされる同一長さrを有しており、rを半径として同期して無限回転可能である。この結果、リンク3−1、3−2、3−3が同期して半径rで回転すると、テーブル2つまり加速度センサパッケージ1も半径rで円運動することになる。
【0019】
また、回転時に荷重が偏るのを防止するために、各リンク3−1、3−2、3−3には、カウンタウェイト7−1、7−1’、7−2、7−2’、7−3、7−3’を設けて質量のバランスを図っている。たとえば、リンク3−2においては、M1はカウンタウェイト7−2、7−2’の質量中心、M2はカウンタウェイト7−2、7−2’を除くカウンタ3−2全体の質量中心とし、M3は加速度センサパッケージ1及びテーブル2の両者の1/3の質量中心とする。尚、“1/3”はリンク数に応じた値である。リンク数がnであれば、1/3は1/nとなる。この場合、加速度センサパッケージ1及びテーブル2の両者の1/3の質量が保持軸8−2にかかるように、カウンタウェイト7−2、7−2’の重さを定める。これにより、リンク3−1、3−2、3−3が回転しても、カウンタウェイト7−1、7−1’、7−2、7−2’、7−3、7−3’を含んだ各リンク3−1、3−2、3−3の質量中心は各リンク3−1、3−2、3−3の回転軸4−1、4−2、4−3にあるので、回転軸4−1、4−2、4−3には遠心力つまり並進力は発生せず、従って、安定な回転が得られる。また,ある回転軸について加速度センサパッケージ1及びテーブル2を合わせた質量中心(保持軸の位置に相当)から回転軸までの距離rと加速度センサパッケージ1及びテーブル2を合わせた質量との積と、各カウンタウェイトの質量中心から回転軸までの距離r’と各カウンタウェイトの積の合計とが一致すれば、加速度センサパッケージ1及びテーブル2を合わせた質量と各カウンタウェイトの合計質量は一致しなくてもよい。つまり、センサ系の質量×長さr=カウンタウェイト系の質量×長さr’を満足すればよい。
【0020】
テーブル2及びリンク3−1、3−2、3−3は3つの平行リンク構造の結合であるので、リンク3−1、3−2、3−3の1つのみを駆動回転すれば、3つのリンク3−1、3−2、3−3は同期回転駆動される。図2、図3においては、リンク3−3のみが駆動モータ9によって回転板9aを介して駆動される。
【0021】
さらに、装置を縦置きにして加速度センサパッケージ1が常に重力加速度gを受けながら動作することを想定し、各質量中心M1、M2、M3は装置の高さ方向でも一致させている。従って、装置がどのような傾きにおいても回転させる際のトルクはほとんど不要となり、非常に滑らかな回転が期待できると共に、装置を小型化できる。
【0022】
尚、図1〜図3では、制御安定性、加工精度等を考慮してリンク3−1、3−2、3−3の数を3個としているが、リンク数は2もしくは4以上であってもよい。また、加速度センサパッケージ1のセンサとしては、たとえば、静電容量加速度センサであるが、本発明は他の加速度センサにも適用し得る。
【0023】
図4は図1〜図3の加速度センサパッケージ1内における実際のセンサ主軸方向の単位ベクトルs1、s2、s3を示す。尚、s1、s2、s3は各センサ主軸をも指すものとする。単位ベクトルs1、s2、s3は123座標系に対する方向余弦で表わすことができる。
s1= [c11, c12, c13]t
s2= [c21, c22, c23]t
s3= [c31, c32, c33]t
但し、tは転置を意味する。理想的には、センサ主軸方向は加速度センサパッケージ1の座標方向に一致しており、
cij = δij
但し、δijはクロネッカーの記号、
i = 1, 2, 3
j = 1, 2, 3
つまり、
cii=1
cij=0 (i≠j)
であるが、実際には、図4に示すごとく、センサ主軸方向は加速度センサパッケージ1の座標方向に一致せず、この結果、i=jのときには、cijは1に近い値、つまり、
cij≒1
i≠jのときには、cijは0に近い値、つまり、
cij≒0
である。
【0024】
図1〜図3において、図5の(A)に示すごとく、加速度センサパッケージ1の123座標系をxyz座標系に一致させかつ理想的な配置のセンサ主軸s1、s2、s3の場合の動作を説明する。
【0025】
すなわち、図1〜図3の加速度センサパッケージ1を等速円運動させると、遠心力及び重力によって加速度センサパッケージ1の各センサ主軸に加わる入力加速度ベクトルaは、xyz座標系(=123座標系)で表わすと、
a = [r|ω|2cosθ, r|ω|2sinθ, -g]t
但し、rは加速度センサパッケージ1の回転の半径、
ωは加速度センサパッケージ1の回転の角速度ベクトル、
θはエンコーダ角度、つまり、リンク3−1、3−2、3−3と単位ベクトルexとがなす角度、
gは重力加速度である。
2つのベクトルの内積si・aは各センサ主軸siのセンサの出力電圧のうち、ベクトルaによって生じた電圧を感度で除算した値とみなせる。従って、センサ主軸s1、s2、s3が理想的な配置の場合、つまり、cii=1、cij=0(i≠j)の場合、センサ主軸s1については、θ=0°のとき出力電圧vout_1は最大、θ=180°のとき出力電圧vout_1は最小、また、センサ主軸s2については、θ=90°のとき出力電圧vout_2は最大、θ=270°のとき出力電圧vout_2は最小、さらに、センサ主軸s3については、出力電圧vout_3は一定である。尚、図5の(B)はセンサ主軸s1に対応する出力電圧vout_1を示し、θ=0°で加速度つまり出力電圧vout_1が最大、θ=180°で加速度つまり出力電圧vout_1が最小となっている。
【0026】
図1〜図3において、図6の(A)に示すごとく、加速度センサパッケージ1の123座標系をxyz座標系に一致させかつ実際の配置のセンサ主軸s1、s2、s3の場合の動作を説明する。
【0027】
この場合には、cii≒1、cij≒0(i≠j)であり、センサ主軸s1については、xy平面上の射影方向のずれをΔθ1とすれば、θ=0°と異なるθ=Δθ1のとき出力電圧vout_1は最大、θ=180°と異なるθ=180°+Δθ1のとき出力電圧vout_1は最小、また、センサ主軸s2については、xy平面上の射影方向のずれをΔθ2とすれば、θ=90°と異なるθ=90°+Δθ2のとき出力電圧vout_2は最大、θ=270°と異なるθ=270°+Δθ2のとき出力電圧vout_2は最小となる。さらに、センサ主軸s3についても、xy平面上の射影方向のずれをΔθ3とすれば、θ=Δθ3のとき出力電圧vout_3は最大、θ=180+Δθ3のとき出力電圧vout_3は最小となる。尚、図6の(B)はセンサ主軸s1に対応する加速度信号(出力電圧)vout_1を示す。
【0028】
このように、実際には、センサ主軸s1、s2、s3は123座標方向からずれるが、センサ主軸s1、s2、s3の出力電圧が最大となるエンコーダ角度は必ず存在する。さらに、加速度センサパッケージ1の123座標系を任意にxyz座標系に対して設定しても、つまり、加速度センサパッケージ1をどのような姿勢にしても、図1〜図3の加速度センサ特性評価装置を用いて加速度センサパッケージ1を等速円運動させると、センサ主軸s1、s2、s3の出力電圧が最大となるエンコーダ角度θが必ず存在する。本発明は後者を利用してセンサ主軸方向の単位ベクトルs1、s2、s3を演算する。
【0029】
次に、図1の制御回路10の動作を図7のフローチャート及び図8を参照して説明する。
【0030】
始めに、ステップ701において、図8の(A)に示すxyz座標系に対して123座標系が一致している状態からある回転行列Raによって123座標系つまり加速度センサパッケージ1を回転させて固定する(図8の(B))。尚、回転行列Raの値については後述する。
【0031】
次に、ステップ702において、図2、図3の駆動モータ9を動作させてテーブル2つまり加速度センサパッケージ1に対してたとえば0.1Hzのxy平面上で等速円運動の加振を行う。この状態で、エンコーダ角度θと同期して取り込んだ1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3を用いて各センサ主軸方向の単位ベクトルsi(i=1,2,3)のxy平面への射影角θiaを得る。このときの単位ベクトルsiのxy平面上の射影方向の単位ベクトルsia’は
[cosθia, sinθia, 0]t
となる。
【0032】
次に、ステップ703において、単位ベクトルsia’及び単位ベクトルezを含む平面φiaを平面φiaのxyz座標系の単位法線ベクトルnia’で設定する。つまり、
nia’ = ez × sia’
= [-sinθia, cosθia, 0]t
となる。
【0033】
次に、ステップ704において、xyz座標系の平面φiaを図8の(C)に示す123座標系の平面φiaに変換する。この123座標系の平面φiaは123座標系の平面φiaの単位法線ベクトルnia’で設定される。つまり、
nia = Ra-1nia’
= Ratnia’
【0034】
次に、ステップ705において、図8の(A)に示すxyz座標系に対して123座標系が一致している状態からRaと異なる回転行列Rbによって123座標系つまり加速度センサパッケージ1を回転させて固定する(図8の(D))。尚、回転行列Rbの値については後述する。
【0035】
次に、ステップ706において、図2、図3の駆動モータ9を動作させてテーブル2つまり加速度センサパッケージ1に対してたとえば0.1Hzのxy平面上で等速円運動の加振を行う。この状態で、1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3を用いて各センサ主軸方向の単位ベクトルsi(i=1,2,3)のxy平面への射影角θibを得る。このときの単位ベクトルsiのxy平面上の射影方向の単位ベクトルsib’は
[cosθib, sinθib, 0]t
となる。
【0036】
次に、ステップ707において、ベクトルsi及び単位ベクトルezを含む平面φibを平面φibのxyz座標系の単位法線ベクトルnib’で設定する。つまり、
nib’ = ez × sib’
= [-sinθib, cosθib, 0]t
となる。
【0037】
次に、ステップ708において、xyz座標系の平面φibを図8の(E)に示す123座標系の平面φibに変換する。この123座標系の平面φibは123座標系の平面φibの単位法線ベクトルnib’で設定される。つまり、
nib = Rb-1nib’
= Rbtnib’
【0038】
次に、ステップ709において、123座標系の平面φia、φibの交線によりセンサ主軸siを求める。つまり、図8の(F)に示すごとく、
si = ±(nia×nib)/|nia×nib|
但し、nia、nibはベクトルであり、nia×nibは外積を表わす。
【0039】
最後に、ステップ710において、感度を演算する。尚、感度について、後述する。
【0040】
上述のセンサ主軸siの方向はベクトルsiの成分のうち、通常は最大となる余弦成分cijが正になるよう設定すればよいが、出力電圧の測定値と整合させてもよい。
【0041】
また、決定する2つの回転行列Ra、Rbは、すべての方向(i=1, 2, 3)について2つの法線ベクトルnia’とnib’とのなす角度がなるべく大きくなるように設定する必要がある。実際の測定ではさまざまな誤差が含まれるので、センサ主軸s1を含むふたつの平面φia、φibがなす角度はなるべく90°に近いことが望ましい。また、回転軸(ez)といずれかのセンサ主軸方向siを平行に近く設定してしまうと、その方向のセンサ出力電力vout_1の振幅が小さくなってしまうことにも注意する必要がある。仮にある方向のセンサ主軸をxy平面に射影したときのxy平面上での誤差の大きさをleとすると、射影角θiの測定精度はセンサ主軸方向の単位ベクトルsiの射影長さをlsとしたときle/lsとなる。従って、装置の回転面に対するセンサ主軸方向siの射影長さはすべての方向のセンサ主軸siについてなるべく大きくとる必要がある。
【0042】
3軸に対して3つの直交姿勢で測定を行えば理論的には最も精度よく主軸方向と感度を同定することが可能だが、実際には測定の度にセンサの姿勢を変更するので、取り付け誤差や温度変化、入力電圧変化といった測定条件の不一致による問題が生じる。また、コスト的にも測定回数は少ないことが望ましい。本発明では、加速度センサパッケージ1の姿勢をうまくとれば1回の等速円運動で3方向のセンサ主軸方向s1を含む平面が3つ同時に得られるので、合計2回の測定実験によって3つのセンサ主軸方向siを全て同定することが可能である。
【0043】
理想の3軸加速度センサで考えた場合、全方向のセンサ主軸siの射影長さを全て等しくとるような姿勢は有限回転群であり、本発明において有意に異なる姿勢は図9に示すようにxy平面に対して4つ存在する。この4つの姿勢のうち、任意の2つの姿勢の組合せは3方向のセンサ主軸のうちどれか1つの方向のセンサを含む平面同士が同一になってしまう。従って、センサのxyz座標系に対する2つの姿勢を式(1)で示す回転行列Ra、Rbで表わすとすると、2回の等速円運動で全方向のセンサの射影長さの合計を等しくとる組合せ(Ra’のcosα=√(3/5))か、2つの平面の法線ベクトル同士の外積が大きいほど2平面同士のなす角度が90°に近くなることを考慮し、1つのセンサあたりの2回分の射影長さの積と、法線ベクトルの外積との積が等しくなるような姿勢の組合せ(Ra’のcosα=√(7/3))といったものが候補として考えられる。
【数1】

【0044】
発明者らの実験によると、xy平面に対して3つのセンサ主軸s1、s2、s3の射影長さを大きくするために、回転行列Ra、Rbを図10の(A)、図11の(A)に示すごとく設定した。この場合、図10の(A)のRa、図11の(A)のRbにおいては、式(1)における角度αはcosα=1/√3となる鋭角である。尚、図10の(B)、図11の(B)は図10の(A)、図11の(A)の回転行列Ra、Rbで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系を示し、図10の(C)、図11の(C)は、Ra、Rb回転後の123座標系の実際の加速度センサパッケージを示す写真である。図10、図11のいずれの場合も、センサ主軸siのxy平面に対する射影長さは1/√2以上となる。
【0045】
図10、図11の回転行列Ra、Rbによって回転後のセンサ主軸siに対して図7のステップ702、706によって得られたxy平面上の射影角θia、θibの一例を下表に示す。
【表1】
【0046】
表1の射影角Δθiは次の条件によって得られた。加速度センサパッケージ1の回転半径rは50mm、ロータリエンコーダ2aは324000pprのものを使用する。ただし,ロータリエンコーダのパルス数は必要な精度に応じて前後してかまわない。ギアヘッドの振動の影響を避けるために、駆動モータ9の端部は円形とし、ゴムで表面を覆ったテーブル2を利用して機構を回転させている。PID制御による0.1Hz 駆動時の回転周波数の平均誤差は約1%である。0.002 〜 0.2m/s2(0.2 〜 20gal)の範囲の入力加速度を設定可能である。
【0047】
上述の装置を用いてMEMS デバイスの加速度センサパッケージ1の等速円運動の加振実験を行った。この加振条件は加振周波数0.5Hz であり、センサが受ける加速度は最大約0.5m/s2である。オフセット電圧の時間変化の影響が無視できない場合は基線補正を行う必要があるが、今回実験に用いたセンサは電圧変化率が1%以内で安定しており、補正は行っていない。測定によって得られた出力電圧は、非線形曲線近似を行う。得られた近似正弦波とロータリエンコーダ2aから得られる入力加速度とを比較することで、センサ主軸方向を含む平面とパッケージ角度とのずれΔθiを測定した。
【0048】
センサを異なる姿勢にして同様の実際のセンサ主軸siの方向を含む2平面φia、φibが得られ、その交線が実際のセンサ主軸siの方向を示すことになる。このとき、123座標系の2つの平面φia、φib同士が平行に近くなるような状態は避けるようにする。
【0049】
次に、図7の感度演算ステップ710について詳述する。
【0050】
実際の加速度センサパッケージ1では、同一パッケージ内でも各センサ主軸方向でセンサ感度が異なっている。さらに温度ドリフトなどによってオフセット電圧voff_iも変化する。センサ主軸siのセンサ感度をκiとすると、厳密には、κiは、入力加速度a、温度T、入力電圧vinなどに依存する非線形関数である。また、センサ主軸siのセンサが出力する電圧vout_iは式(2)で示される。
【数2】
センサ感度κiについて、温度が一定に保たれた室内で測定が短
時間であれば温度や入力電圧の変化による影響は小さいと考えられる。この場合、センサ感度κiはaのみを変数としたκi=kisi・a (kiはセンサ主軸siの加速度のみに対する感度を意味する定数) と近似することができる。この場合、式(2) は次式で示される。
【数3】
尚voff_iは短い時間であればほぼ線形に変化する。このため、本装置では、同位相同士の電圧、例えばθ = 0°のときのvout_iと、θ = 360°のときのvout_iとの差分をとることでvoff_iを除去できる。また、本装置では各センサ主軸方向のセンサに対して入力加速度が正弦波となることを利用して、測定開始時と測定終了時の出力電圧の平均値からvoff_iの項を除去することもできる。
【0051】
さて、 式(3)より装置によって得られる出力電圧vout_iの振幅にはセンサ主軸方向と入力加速度によって決定されるsi・aの成分と、センサ感度κiの両者が積算されて含まれていることが分かる。両者を分離して同定するためにはセンサ感度κiかセンサ主軸siの方向のどちらかが既知である必要がある。センサ主軸siの方向が不明な状態でセンサ感度κiのみを特定することはできないから、上述の方法でセンサ主軸方向の単位ベクトルsiの成分を先に求めた後、内積si・aの値からセンサ感度κiを計算することになる。
【0052】
今、センサ主軸方向の単位ベクトルsiが既知となった場合、装置によって等速円運動で加振された際のセンサ主軸siのセンサの最大電圧をvout_i(max)、最小電圧をvout_i(min)としたとき、両者の差は式(4)となる。
【数4】
右辺はセンサ主軸siが装置から受ける遠心力にセンサ感度κiを乗じた値の2倍を意味している。装置の回転角速度|ω| が一定であれば式(4)を利用して、加速度センサパッケージ1を装置から取り外すことなく一回の測定データの中からセンサ感度κiを特定することができる。以上のことをまとめてテンソルを利用して表現すると、式(5)となる。
【数5】
但し、Sはセンサ主軸siの方向テンソル、Kは感度テンソル、voff、voutはそれぞれオフセット電圧及び各センサの出力電圧を示すベクトルである。Sは3つのセンサの主軸方向を含んだ行列であるが、3つの一次独立な斜交基底ベクトルs1, s2, s3によって構成された座標変換テンソルと見ることもできる。また、拡大係数行列を利用すると、式(5)は式(6)のように表現できる。
【数6】
このように、センサの実方向同士が直交していない一般的な3軸加速度センサは入力加速度ベクトル空間を、テンソルKSによって電圧ベクトル空間に変換し、基底座標をオフセット電圧voffに移すアフィン変換であるから、逆変換が存在すればそれによって加速度ベクトルaを求めることができる。
【0053】
式(5)、(6)より、3軸加速度センサの特性を得るためには必ずしもテンソルSとテンソルKとを分離して求める必要はなく、積KSの形で求まればよい。但し、オフセット電圧ベクトルvoffは時間によって変化する場合があることに注意しなければならない。仮にK, S(あるいはKS)およびベクトルvoffが既知となれば、入力加速度ベクトルaは出力電圧ベクトルvoutから式(7)を利用して求めることができる。
【数7】
【0054】
複数軸の加速度センサのうち2軸の主軸方向が重なるとか、ある方向の感度が0であるなどの異常な事態を除けば逆変換T-1は存在する。上述の方法で校正した加速度センサは、互いのセンサ実軸方向が必ずしも直交していなくても入力加速度を3次元のベクトルとして求められるので、センサの特性が安定していれば常に高精度な計測ができる利点がある。また、実際の計算は3×3の正方行列を扱うだけなので高速な演算が可能であり、校正後のリアルタイム処理、例えば航空機や自動車のデッドレコニングなどの応用にも有利と考えられる。
【0055】
実験で得られた2つの姿勢における各Δθiの表1から計算で得られたセンサ主軸方向の単位ベクトルsiと感度を表2に示す。
【表2】
【0056】
つまり、求められたセンサ主軸方向ベクトルsiより、横感度に換算した場合最大2.3%という結果が得られ、当該加速度センサパッケージ1のデータシートの標準的な値(最大3%、標準2%) と一致した。オフセット電圧は時間に依存せずほぼ一定であった(最大ノイズレベルは加速度換算で約0.4m/s2)。感度に関してもデータシートの値1000mV/g (≒100mV/(m/s2))とほぼ同様の結果が得られた。また、表2の結果を式(5)の形式で示すと式(8)のようになる。
【数8】
【0057】
この結果から、サンプルとして用いた加速度センサパッケージ1については式(5)あるいは式(7)を利用して出力電圧から入力加速度をベクトルの形で求められることが示された。このように、センサ個別にセンサ主軸方向と感度とを同定できるので、センサ個体のばらつきにも対応可能となる。
【0058】
上述の加速度センサパッケージ1は3軸加速度センサを有するが、本発明は、2軸加速度センサあるいは1軸加速度センサを含む加速度センサパッケージにも適用し得る。
【符号の説明】
【0059】
1:加速度センサパッケージ
2:テーブル
2a:ロータリエンコーダ
3−1、3−2、3−3:リンク
4−1、4−2、4−3:回転軸
5−1、5−2:支持板
6−1、6−2、6−3、6−4:支持柱
7−1、7−1’、7−2、7−2’、7−3、7−3’:カウンタウェイト
8−1、8−2、8−3:保持軸
9:駆動モータ
9a:回転板
10:制御回路
【技術分野】
【0001】
本発明はたとえば変位測定手段として用いられる加速度センサの特性評価方法及びプログラム、特に、加速度センサのセンサ主軸方向及び感度を同定する特性評価方法及びプログラムに関する。
【背景技術】
【0002】
たとえば3軸加速度センサの校正方法はISO16063(参照:非特許文献1)、ISO5347(参照:非特許文献2)等で定義されているが、これらの方法は加速度センサのパッケージの方向と加速度センサの各軸のセンサ主軸方向とが一致していることが前提となっている。しかしながら、この前提は必ずしも保証されているとは言えない。しかも、上述の校正方法は加速度センサに対して直動方向で加速度を入力するので、この入力加速度を知るには、一般には、変位センサのデータを2回微分するか、あるいは、加速度センサの質量及び力を同時に計測する必要がある。この結果、高精度の校正を実現することは技術的に困難がある。
【0003】
加速度センサ中のある一方向のセンサは、その原理上、基本的にその主軸方向の加速度しか検出できない。しかしながら、実際の加速度センサでは、製造時および取り付け時に生じる方向の誤差があるので、加速度センサのパッケージ方向と各センサ主軸方向とを完全に一致させることは困難である。また、現在広く普及しているマイクロエレクトロメカニカルシステム(MEMS)デバイスの加速度センサにおいても、加速度センサのパッケージ方向と各センサ主軸方向とを高精度に一致させることは容易ではない。この方向の不一致の結果、たとえば、x軸方向のセンサがy軸あるいはz軸方向の加速度を検出してしまうという現象を引き起こす。一般に、このような本来の検出方向でない加速度を検出してしまう度合は横感度と呼ばれ、加速度センサのデータシートに記載されている場合も少なくない。
【0004】
従来の加速度センサ特性評価方法によれば、加速度センサに定義したx軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをx軸方向に正弦波加振してx軸に関する主軸感度Sxxを求め、また、加速度センサに定義したy軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをy軸方向に正弦波加振してx軸に関する横感度Sxyを求め、さらに、加速度センサに定義したz軸方向がテーブルの振動x軸方向と一致するように加速度センサをテーブル上に取り付けた立方体ブロック(パッケージに相当)を固定しテーブルをz軸方向に正弦波加振してx軸に関する横感度Sxzを求める。同様にして、並進化速度に関する感度Syx、Syy、Syz、Szx、Szy、Szzを求める。これにより、加速度を正確な三次元ベクトルとして算出できる(参照:特許文献1及び非特許文献3)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】WO2005/095998
【非特許文献】
【0006】
【非特許文献1】ISO 16063-1: Methods for the calibration of vibration and shock transducers Part 1, Basic concepts, 1998
【非特許文献2】ISO 5347: Methods for the calibration of vibration and shock pick-ups, 1993
【非特許文献3】梅田章ほか、“三次元振動発生機とレーザ干渉計による三軸加速度計の三次元加速度計としての校正法に関する研究”、日本機械学会論文集C編、70巻697号、2007、pp.38-45
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の従来の加速度センサ特性評価方法によれば、コスト、測定時間、及び測定精度の点で劣るという課題があった。
【0008】
従って、本発明は慣性モーメント、摩擦力が位相に依存しなくするようにした上に、重量バランスによってどのような位相でも必要トルクが一定となるようにし、加速度センサを外界に対して角度姿勢を保持させた状態で等速円運動を可能にして、微小時間でも、高精度の2軸同時測定を可能にする加速度センサ特性評価装置を用いて、加速度センサのセンサ主軸方向及び感度を同定する。
【課題を解決するための手段】
【0009】
上述の課題を解決するために、本発明に係る加速度センサ特性評価方法は、テーブルと、テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、これら各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置のテーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定する段階と、第1の回転行列を用いて回転固定後にテーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第1の射影方向を演算する段階と、xyz座標系のz軸及びxyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する段階と、xyz座標系の第1の平面を第1の回転行列の逆行列を用いて123座標系の第1の平面に変換する段階と、テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列と異なる第2の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定する段階と、第2の回転行列に用いた回転固定後にテーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第2の射影方向を演算する段階と、xyz座標系のz軸及びxyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する段階と、xyz座標系の第2の平面を第2の回転行列の逆行列を用いて123座標系の第2の平面に変換する段階と、123座標系の第1、第2の平面の交線を加速度センサパッケージの各センサの主軸方向として演算する段階とを具備するものである。また、加速度センサパッケージの各センサの主軸方向の単位ベクトルと等速円運動による入力加速度ベクトルとの内積に応じた各センサからの出力電圧によって各センサの感度を演算する段階を具備する。
【0010】
また、本発明に係る加速度センサ特性評価プログラムは、テーブルと、テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、これら各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置のテーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定した後に、テーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第1の射影方向を演算する手順と、xyz座標系のz軸及びxyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する手順と、xyz座標系の第1の平面を第1の回転行列の逆行列を用いて123座標系の第1の平面に変換する手順と、テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列と異なる第2の回転行列を用いて回転させて加速度センサパッケージをテーブルに固定した後に、テーブルを駆動手段によってxyz座標系のxy平面上で等速円運動による加振を行って加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて各センサの主軸方向のxyz座標系のxy平面上の第2の射影方向を演算する手順と、xyz座標系のz軸及びxyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する手順と、xyz座標系の第2の平面を第2の回転行列の逆行列を用いて123座標系の第2の平面に変換する手順と、123座標系の第1、第2の平面の交線を加速度センサパッケージの各センサの主軸方向として演算する手順とを具備するものである。また、加速度センサパッケージの各センサの主軸方向の単位ベクトルと等速円運動による入力加速度ベクトルとの内積に応じた各センサからの出力電圧によって各センサの感度を演算する手順を具備する。
【発明の効果】
【0011】
本発明によれば、従来の加速度センサ特性評価方法において用いられた横感度という概念は不要となり、センサ主軸の方向を回転行列及びその逆行列を用いて演算しているので、コスト、測定時間及び測定精度の点で優れている。
【図面の簡単な説明】
【0012】
【図1】本発明に係る加速度センサ特性評価装置を示す図である。
【図2】図1の加速度センサ特性評価装置の詳細を示す斜視図である。
【図3】図2の加速度センサ特性評価装置の部分断面図である。
【図4】図1〜図3の加速度センサパッケージ内の実際のセンサ主軸方向を示す斜視図である。
【図5】図1〜図3の加速度センサ特性評価装置において123座標系=xyz座標系かつ理想的な配置のセンサ主軸の場合の動作を説明するもので、(A)はベクトル図、(B)は1軸加速度信号(出力電圧)を示す図である。
【図6】図1〜図3の加速度センサ特性評価装置において123座標系=xyz座標系かつ実際的な配置のセンサ主軸の場合の動作を説明するもので、(A)はベクトル図、(B)は1軸加速度信号(出力電圧)を示す図である。
【図7】図1、図2の制御回路の動作を示すフローチャートである。
【図8】図7のフローチャートを補足説明する図である。
【図9】図1〜図3の加速度センサパッケージのセンサ主軸の有意な姿勢を示す図である。
【図10】図7、図8の回転行列Raの一例を示し、(A)はその行列の数値であり、(B)は(A)の回転行列Raで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系を示し、(C)は、Ra回転後の123座標系の実際の加速度センサパッケージを示す写真である。
【図11】図7、図8の回転行列Rbの一例を示し、(A)はその行列の数値であり、(B)は(A)の回転行列Rbで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系の実際の加速度センサパッケージを示す写真である。
【発明を実施するための形態】
【0013】
図1は本発明に係る加速度センサ特性評価装置を示す図である。
【0014】
図1に示すように、加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して無限回転可能である。従って、ベアリングの偏り等を無視すれば、テーブル2の慣性モーメント、摩擦力は位相に依存せずに一定となり、テーブル2つまり加速度センサパッケージ1は外界に対して姿勢を保持した状態で、矢印R0に示すごとく、リンク3−1、3−2、3−3の長さrを半径とする完全な等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。この結果、加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
【0015】
加速度センサパッケージ1の正弦波状の1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3はロータリエンコーダ2aの角度信号Eに同期して制御回路(コンピュータ)10に供給され、この結果、制御回路10は1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3から加速度センサパッケージ1のセンサ主軸方向及び感度を演算する。
【0016】
図1においては、加速度センサ特性評価装置の固定部の座標系をxyzとし、その基底ベクトルをベクトルex、ey、ezとする。また、加速度センサパッケージ1の座標系を123とし、その基底ベクトルをベクトルe1、e2、e3とする。尚、ベクトルは、明細書の式及び図面においては、表示「ベクトル」の代りに、太字で表わすものとする。
【0017】
図2は図1の加速度センサ特性評価装置の詳細を示す斜視図、図3は図2の加速度センサ特性評価装置の部分断面図であって、特に、リンク3−2、3−3の断面図を示している。
【0018】
図2、図3に示すように、リンク3−1、3−2、3−3は2つの支持板5−1、5−2の間にねじによって固定されている。また、支持板5−1、5−2は4つの支持柱6−1、6−2、6−3、6−4によって支持されている。各リンク3−1、3−2、3−3は回転軸4−1、4−2、4−3とテーブル2の保持軸8−1、8−2、8−3との距離で表わされる同一長さrを有しており、rを半径として同期して無限回転可能である。この結果、リンク3−1、3−2、3−3が同期して半径rで回転すると、テーブル2つまり加速度センサパッケージ1も半径rで円運動することになる。
【0019】
また、回転時に荷重が偏るのを防止するために、各リンク3−1、3−2、3−3には、カウンタウェイト7−1、7−1’、7−2、7−2’、7−3、7−3’を設けて質量のバランスを図っている。たとえば、リンク3−2においては、M1はカウンタウェイト7−2、7−2’の質量中心、M2はカウンタウェイト7−2、7−2’を除くカウンタ3−2全体の質量中心とし、M3は加速度センサパッケージ1及びテーブル2の両者の1/3の質量中心とする。尚、“1/3”はリンク数に応じた値である。リンク数がnであれば、1/3は1/nとなる。この場合、加速度センサパッケージ1及びテーブル2の両者の1/3の質量が保持軸8−2にかかるように、カウンタウェイト7−2、7−2’の重さを定める。これにより、リンク3−1、3−2、3−3が回転しても、カウンタウェイト7−1、7−1’、7−2、7−2’、7−3、7−3’を含んだ各リンク3−1、3−2、3−3の質量中心は各リンク3−1、3−2、3−3の回転軸4−1、4−2、4−3にあるので、回転軸4−1、4−2、4−3には遠心力つまり並進力は発生せず、従って、安定な回転が得られる。また,ある回転軸について加速度センサパッケージ1及びテーブル2を合わせた質量中心(保持軸の位置に相当)から回転軸までの距離rと加速度センサパッケージ1及びテーブル2を合わせた質量との積と、各カウンタウェイトの質量中心から回転軸までの距離r’と各カウンタウェイトの積の合計とが一致すれば、加速度センサパッケージ1及びテーブル2を合わせた質量と各カウンタウェイトの合計質量は一致しなくてもよい。つまり、センサ系の質量×長さr=カウンタウェイト系の質量×長さr’を満足すればよい。
【0020】
テーブル2及びリンク3−1、3−2、3−3は3つの平行リンク構造の結合であるので、リンク3−1、3−2、3−3の1つのみを駆動回転すれば、3つのリンク3−1、3−2、3−3は同期回転駆動される。図2、図3においては、リンク3−3のみが駆動モータ9によって回転板9aを介して駆動される。
【0021】
さらに、装置を縦置きにして加速度センサパッケージ1が常に重力加速度gを受けながら動作することを想定し、各質量中心M1、M2、M3は装置の高さ方向でも一致させている。従って、装置がどのような傾きにおいても回転させる際のトルクはほとんど不要となり、非常に滑らかな回転が期待できると共に、装置を小型化できる。
【0022】
尚、図1〜図3では、制御安定性、加工精度等を考慮してリンク3−1、3−2、3−3の数を3個としているが、リンク数は2もしくは4以上であってもよい。また、加速度センサパッケージ1のセンサとしては、たとえば、静電容量加速度センサであるが、本発明は他の加速度センサにも適用し得る。
【0023】
図4は図1〜図3の加速度センサパッケージ1内における実際のセンサ主軸方向の単位ベクトルs1、s2、s3を示す。尚、s1、s2、s3は各センサ主軸をも指すものとする。単位ベクトルs1、s2、s3は123座標系に対する方向余弦で表わすことができる。
s1= [c11, c12, c13]t
s2= [c21, c22, c23]t
s3= [c31, c32, c33]t
但し、tは転置を意味する。理想的には、センサ主軸方向は加速度センサパッケージ1の座標方向に一致しており、
cij = δij
但し、δijはクロネッカーの記号、
i = 1, 2, 3
j = 1, 2, 3
つまり、
cii=1
cij=0 (i≠j)
であるが、実際には、図4に示すごとく、センサ主軸方向は加速度センサパッケージ1の座標方向に一致せず、この結果、i=jのときには、cijは1に近い値、つまり、
cij≒1
i≠jのときには、cijは0に近い値、つまり、
cij≒0
である。
【0024】
図1〜図3において、図5の(A)に示すごとく、加速度センサパッケージ1の123座標系をxyz座標系に一致させかつ理想的な配置のセンサ主軸s1、s2、s3の場合の動作を説明する。
【0025】
すなわち、図1〜図3の加速度センサパッケージ1を等速円運動させると、遠心力及び重力によって加速度センサパッケージ1の各センサ主軸に加わる入力加速度ベクトルaは、xyz座標系(=123座標系)で表わすと、
a = [r|ω|2cosθ, r|ω|2sinθ, -g]t
但し、rは加速度センサパッケージ1の回転の半径、
ωは加速度センサパッケージ1の回転の角速度ベクトル、
θはエンコーダ角度、つまり、リンク3−1、3−2、3−3と単位ベクトルexとがなす角度、
gは重力加速度である。
2つのベクトルの内積si・aは各センサ主軸siのセンサの出力電圧のうち、ベクトルaによって生じた電圧を感度で除算した値とみなせる。従って、センサ主軸s1、s2、s3が理想的な配置の場合、つまり、cii=1、cij=0(i≠j)の場合、センサ主軸s1については、θ=0°のとき出力電圧vout_1は最大、θ=180°のとき出力電圧vout_1は最小、また、センサ主軸s2については、θ=90°のとき出力電圧vout_2は最大、θ=270°のとき出力電圧vout_2は最小、さらに、センサ主軸s3については、出力電圧vout_3は一定である。尚、図5の(B)はセンサ主軸s1に対応する出力電圧vout_1を示し、θ=0°で加速度つまり出力電圧vout_1が最大、θ=180°で加速度つまり出力電圧vout_1が最小となっている。
【0026】
図1〜図3において、図6の(A)に示すごとく、加速度センサパッケージ1の123座標系をxyz座標系に一致させかつ実際の配置のセンサ主軸s1、s2、s3の場合の動作を説明する。
【0027】
この場合には、cii≒1、cij≒0(i≠j)であり、センサ主軸s1については、xy平面上の射影方向のずれをΔθ1とすれば、θ=0°と異なるθ=Δθ1のとき出力電圧vout_1は最大、θ=180°と異なるθ=180°+Δθ1のとき出力電圧vout_1は最小、また、センサ主軸s2については、xy平面上の射影方向のずれをΔθ2とすれば、θ=90°と異なるθ=90°+Δθ2のとき出力電圧vout_2は最大、θ=270°と異なるθ=270°+Δθ2のとき出力電圧vout_2は最小となる。さらに、センサ主軸s3についても、xy平面上の射影方向のずれをΔθ3とすれば、θ=Δθ3のとき出力電圧vout_3は最大、θ=180+Δθ3のとき出力電圧vout_3は最小となる。尚、図6の(B)はセンサ主軸s1に対応する加速度信号(出力電圧)vout_1を示す。
【0028】
このように、実際には、センサ主軸s1、s2、s3は123座標方向からずれるが、センサ主軸s1、s2、s3の出力電圧が最大となるエンコーダ角度は必ず存在する。さらに、加速度センサパッケージ1の123座標系を任意にxyz座標系に対して設定しても、つまり、加速度センサパッケージ1をどのような姿勢にしても、図1〜図3の加速度センサ特性評価装置を用いて加速度センサパッケージ1を等速円運動させると、センサ主軸s1、s2、s3の出力電圧が最大となるエンコーダ角度θが必ず存在する。本発明は後者を利用してセンサ主軸方向の単位ベクトルs1、s2、s3を演算する。
【0029】
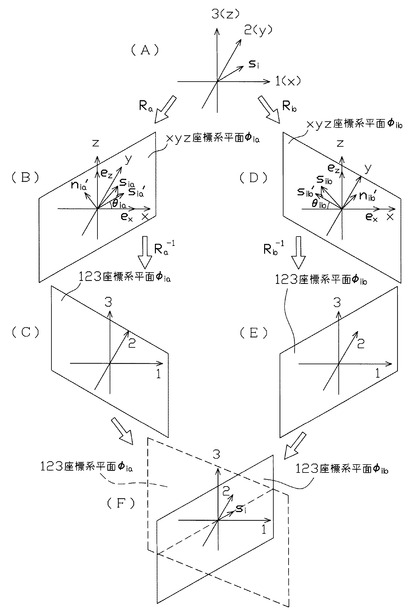
次に、図1の制御回路10の動作を図7のフローチャート及び図8を参照して説明する。
【0030】
始めに、ステップ701において、図8の(A)に示すxyz座標系に対して123座標系が一致している状態からある回転行列Raによって123座標系つまり加速度センサパッケージ1を回転させて固定する(図8の(B))。尚、回転行列Raの値については後述する。
【0031】
次に、ステップ702において、図2、図3の駆動モータ9を動作させてテーブル2つまり加速度センサパッケージ1に対してたとえば0.1Hzのxy平面上で等速円運動の加振を行う。この状態で、エンコーダ角度θと同期して取り込んだ1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3を用いて各センサ主軸方向の単位ベクトルsi(i=1,2,3)のxy平面への射影角θiaを得る。このときの単位ベクトルsiのxy平面上の射影方向の単位ベクトルsia’は
[cosθia, sinθia, 0]t
となる。
【0032】
次に、ステップ703において、単位ベクトルsia’及び単位ベクトルezを含む平面φiaを平面φiaのxyz座標系の単位法線ベクトルnia’で設定する。つまり、
nia’ = ez × sia’
= [-sinθia, cosθia, 0]t
となる。
【0033】
次に、ステップ704において、xyz座標系の平面φiaを図8の(C)に示す123座標系の平面φiaに変換する。この123座標系の平面φiaは123座標系の平面φiaの単位法線ベクトルnia’で設定される。つまり、
nia = Ra-1nia’
= Ratnia’
【0034】
次に、ステップ705において、図8の(A)に示すxyz座標系に対して123座標系が一致している状態からRaと異なる回転行列Rbによって123座標系つまり加速度センサパッケージ1を回転させて固定する(図8の(D))。尚、回転行列Rbの値については後述する。
【0035】
次に、ステップ706において、図2、図3の駆動モータ9を動作させてテーブル2つまり加速度センサパッケージ1に対してたとえば0.1Hzのxy平面上で等速円運動の加振を行う。この状態で、1軸加速度信号vout_1、2軸加速度信号vout_2及び3軸加速度信号vout_3を用いて各センサ主軸方向の単位ベクトルsi(i=1,2,3)のxy平面への射影角θibを得る。このときの単位ベクトルsiのxy平面上の射影方向の単位ベクトルsib’は
[cosθib, sinθib, 0]t
となる。
【0036】
次に、ステップ707において、ベクトルsi及び単位ベクトルezを含む平面φibを平面φibのxyz座標系の単位法線ベクトルnib’で設定する。つまり、
nib’ = ez × sib’
= [-sinθib, cosθib, 0]t
となる。
【0037】
次に、ステップ708において、xyz座標系の平面φibを図8の(E)に示す123座標系の平面φibに変換する。この123座標系の平面φibは123座標系の平面φibの単位法線ベクトルnib’で設定される。つまり、
nib = Rb-1nib’
= Rbtnib’
【0038】
次に、ステップ709において、123座標系の平面φia、φibの交線によりセンサ主軸siを求める。つまり、図8の(F)に示すごとく、
si = ±(nia×nib)/|nia×nib|
但し、nia、nibはベクトルであり、nia×nibは外積を表わす。
【0039】
最後に、ステップ710において、感度を演算する。尚、感度について、後述する。
【0040】
上述のセンサ主軸siの方向はベクトルsiの成分のうち、通常は最大となる余弦成分cijが正になるよう設定すればよいが、出力電圧の測定値と整合させてもよい。
【0041】
また、決定する2つの回転行列Ra、Rbは、すべての方向(i=1, 2, 3)について2つの法線ベクトルnia’とnib’とのなす角度がなるべく大きくなるように設定する必要がある。実際の測定ではさまざまな誤差が含まれるので、センサ主軸s1を含むふたつの平面φia、φibがなす角度はなるべく90°に近いことが望ましい。また、回転軸(ez)といずれかのセンサ主軸方向siを平行に近く設定してしまうと、その方向のセンサ出力電力vout_1の振幅が小さくなってしまうことにも注意する必要がある。仮にある方向のセンサ主軸をxy平面に射影したときのxy平面上での誤差の大きさをleとすると、射影角θiの測定精度はセンサ主軸方向の単位ベクトルsiの射影長さをlsとしたときle/lsとなる。従って、装置の回転面に対するセンサ主軸方向siの射影長さはすべての方向のセンサ主軸siについてなるべく大きくとる必要がある。
【0042】
3軸に対して3つの直交姿勢で測定を行えば理論的には最も精度よく主軸方向と感度を同定することが可能だが、実際には測定の度にセンサの姿勢を変更するので、取り付け誤差や温度変化、入力電圧変化といった測定条件の不一致による問題が生じる。また、コスト的にも測定回数は少ないことが望ましい。本発明では、加速度センサパッケージ1の姿勢をうまくとれば1回の等速円運動で3方向のセンサ主軸方向s1を含む平面が3つ同時に得られるので、合計2回の測定実験によって3つのセンサ主軸方向siを全て同定することが可能である。
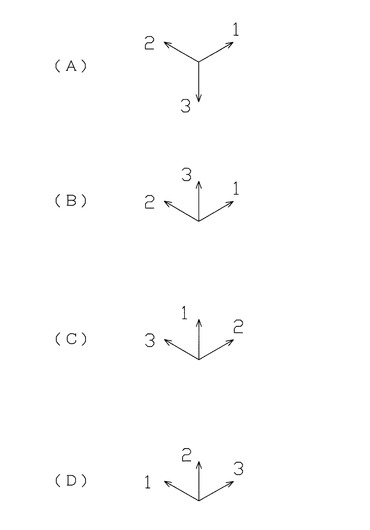
【0043】
理想の3軸加速度センサで考えた場合、全方向のセンサ主軸siの射影長さを全て等しくとるような姿勢は有限回転群であり、本発明において有意に異なる姿勢は図9に示すようにxy平面に対して4つ存在する。この4つの姿勢のうち、任意の2つの姿勢の組合せは3方向のセンサ主軸のうちどれか1つの方向のセンサを含む平面同士が同一になってしまう。従って、センサのxyz座標系に対する2つの姿勢を式(1)で示す回転行列Ra、Rbで表わすとすると、2回の等速円運動で全方向のセンサの射影長さの合計を等しくとる組合せ(Ra’のcosα=√(3/5))か、2つの平面の法線ベクトル同士の外積が大きいほど2平面同士のなす角度が90°に近くなることを考慮し、1つのセンサあたりの2回分の射影長さの積と、法線ベクトルの外積との積が等しくなるような姿勢の組合せ(Ra’のcosα=√(7/3))といったものが候補として考えられる。
【数1】
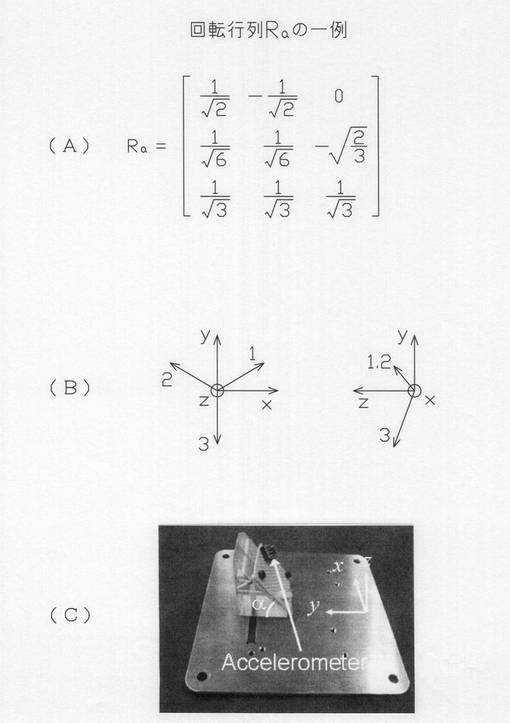
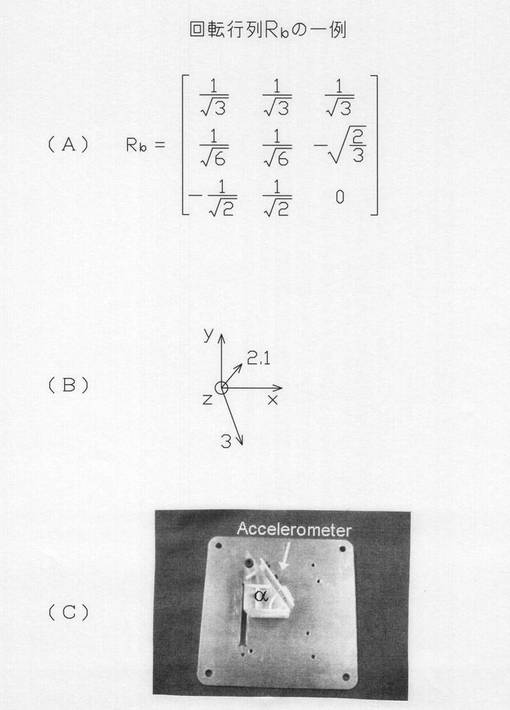
【0044】
発明者らの実験によると、xy平面に対して3つのセンサ主軸s1、s2、s3の射影長さを大きくするために、回転行列Ra、Rbを図10の(A)、図11の(A)に示すごとく設定した。この場合、図10の(A)のRa、図11の(A)のRbにおいては、式(1)における角度αはcosα=1/√3となる鋭角である。尚、図10の(B)、図11の(B)は図10の(A)、図11の(A)の回転行列Ra、Rbで123座標系を回転させた場合のxyz座標系に対する回転後の123座標系を示し、図10の(C)、図11の(C)は、Ra、Rb回転後の123座標系の実際の加速度センサパッケージを示す写真である。図10、図11のいずれの場合も、センサ主軸siのxy平面に対する射影長さは1/√2以上となる。
【0045】
図10、図11の回転行列Ra、Rbによって回転後のセンサ主軸siに対して図7のステップ702、706によって得られたxy平面上の射影角θia、θibの一例を下表に示す。
【表1】
【0046】
表1の射影角Δθiは次の条件によって得られた。加速度センサパッケージ1の回転半径rは50mm、ロータリエンコーダ2aは324000pprのものを使用する。ただし,ロータリエンコーダのパルス数は必要な精度に応じて前後してかまわない。ギアヘッドの振動の影響を避けるために、駆動モータ9の端部は円形とし、ゴムで表面を覆ったテーブル2を利用して機構を回転させている。PID制御による0.1Hz 駆動時の回転周波数の平均誤差は約1%である。0.002 〜 0.2m/s2(0.2 〜 20gal)の範囲の入力加速度を設定可能である。
【0047】
上述の装置を用いてMEMS デバイスの加速度センサパッケージ1の等速円運動の加振実験を行った。この加振条件は加振周波数0.5Hz であり、センサが受ける加速度は最大約0.5m/s2である。オフセット電圧の時間変化の影響が無視できない場合は基線補正を行う必要があるが、今回実験に用いたセンサは電圧変化率が1%以内で安定しており、補正は行っていない。測定によって得られた出力電圧は、非線形曲線近似を行う。得られた近似正弦波とロータリエンコーダ2aから得られる入力加速度とを比較することで、センサ主軸方向を含む平面とパッケージ角度とのずれΔθiを測定した。
【0048】
センサを異なる姿勢にして同様の実際のセンサ主軸siの方向を含む2平面φia、φibが得られ、その交線が実際のセンサ主軸siの方向を示すことになる。このとき、123座標系の2つの平面φia、φib同士が平行に近くなるような状態は避けるようにする。
【0049】
次に、図7の感度演算ステップ710について詳述する。
【0050】
実際の加速度センサパッケージ1では、同一パッケージ内でも各センサ主軸方向でセンサ感度が異なっている。さらに温度ドリフトなどによってオフセット電圧voff_iも変化する。センサ主軸siのセンサ感度をκiとすると、厳密には、κiは、入力加速度a、温度T、入力電圧vinなどに依存する非線形関数である。また、センサ主軸siのセンサが出力する電圧vout_iは式(2)で示される。
【数2】
センサ感度κiについて、温度が一定に保たれた室内で測定が短
時間であれば温度や入力電圧の変化による影響は小さいと考えられる。この場合、センサ感度κiはaのみを変数としたκi=kisi・a (kiはセンサ主軸siの加速度のみに対する感度を意味する定数) と近似することができる。この場合、式(2) は次式で示される。
【数3】
尚voff_iは短い時間であればほぼ線形に変化する。このため、本装置では、同位相同士の電圧、例えばθ = 0°のときのvout_iと、θ = 360°のときのvout_iとの差分をとることでvoff_iを除去できる。また、本装置では各センサ主軸方向のセンサに対して入力加速度が正弦波となることを利用して、測定開始時と測定終了時の出力電圧の平均値からvoff_iの項を除去することもできる。
【0051】
さて、 式(3)より装置によって得られる出力電圧vout_iの振幅にはセンサ主軸方向と入力加速度によって決定されるsi・aの成分と、センサ感度κiの両者が積算されて含まれていることが分かる。両者を分離して同定するためにはセンサ感度κiかセンサ主軸siの方向のどちらかが既知である必要がある。センサ主軸siの方向が不明な状態でセンサ感度κiのみを特定することはできないから、上述の方法でセンサ主軸方向の単位ベクトルsiの成分を先に求めた後、内積si・aの値からセンサ感度κiを計算することになる。
【0052】
今、センサ主軸方向の単位ベクトルsiが既知となった場合、装置によって等速円運動で加振された際のセンサ主軸siのセンサの最大電圧をvout_i(max)、最小電圧をvout_i(min)としたとき、両者の差は式(4)となる。
【数4】
右辺はセンサ主軸siが装置から受ける遠心力にセンサ感度κiを乗じた値の2倍を意味している。装置の回転角速度|ω| が一定であれば式(4)を利用して、加速度センサパッケージ1を装置から取り外すことなく一回の測定データの中からセンサ感度κiを特定することができる。以上のことをまとめてテンソルを利用して表現すると、式(5)となる。
【数5】
但し、Sはセンサ主軸siの方向テンソル、Kは感度テンソル、voff、voutはそれぞれオフセット電圧及び各センサの出力電圧を示すベクトルである。Sは3つのセンサの主軸方向を含んだ行列であるが、3つの一次独立な斜交基底ベクトルs1, s2, s3によって構成された座標変換テンソルと見ることもできる。また、拡大係数行列を利用すると、式(5)は式(6)のように表現できる。
【数6】
このように、センサの実方向同士が直交していない一般的な3軸加速度センサは入力加速度ベクトル空間を、テンソルKSによって電圧ベクトル空間に変換し、基底座標をオフセット電圧voffに移すアフィン変換であるから、逆変換が存在すればそれによって加速度ベクトルaを求めることができる。
【0053】
式(5)、(6)より、3軸加速度センサの特性を得るためには必ずしもテンソルSとテンソルKとを分離して求める必要はなく、積KSの形で求まればよい。但し、オフセット電圧ベクトルvoffは時間によって変化する場合があることに注意しなければならない。仮にK, S(あるいはKS)およびベクトルvoffが既知となれば、入力加速度ベクトルaは出力電圧ベクトルvoutから式(7)を利用して求めることができる。
【数7】
【0054】
複数軸の加速度センサのうち2軸の主軸方向が重なるとか、ある方向の感度が0であるなどの異常な事態を除けば逆変換T-1は存在する。上述の方法で校正した加速度センサは、互いのセンサ実軸方向が必ずしも直交していなくても入力加速度を3次元のベクトルとして求められるので、センサの特性が安定していれば常に高精度な計測ができる利点がある。また、実際の計算は3×3の正方行列を扱うだけなので高速な演算が可能であり、校正後のリアルタイム処理、例えば航空機や自動車のデッドレコニングなどの応用にも有利と考えられる。
【0055】
実験で得られた2つの姿勢における各Δθiの表1から計算で得られたセンサ主軸方向の単位ベクトルsiと感度を表2に示す。
【表2】
【0056】
つまり、求められたセンサ主軸方向ベクトルsiより、横感度に換算した場合最大2.3%という結果が得られ、当該加速度センサパッケージ1のデータシートの標準的な値(最大3%、標準2%) と一致した。オフセット電圧は時間に依存せずほぼ一定であった(最大ノイズレベルは加速度換算で約0.4m/s2)。感度に関してもデータシートの値1000mV/g (≒100mV/(m/s2))とほぼ同様の結果が得られた。また、表2の結果を式(5)の形式で示すと式(8)のようになる。
【数8】
【0057】
この結果から、サンプルとして用いた加速度センサパッケージ1については式(5)あるいは式(7)を利用して出力電圧から入力加速度をベクトルの形で求められることが示された。このように、センサ個別にセンサ主軸方向と感度とを同定できるので、センサ個体のばらつきにも対応可能となる。
【0058】
上述の加速度センサパッケージ1は3軸加速度センサを有するが、本発明は、2軸加速度センサあるいは1軸加速度センサを含む加速度センサパッケージにも適用し得る。
【符号の説明】
【0059】
1:加速度センサパッケージ
2:テーブル
2a:ロータリエンコーダ
3−1、3−2、3−3:リンク
4−1、4−2、4−3:回転軸
5−1、5−2:支持板
6−1、6−2、6−3、6−4:支持柱
7−1、7−1’、7−2、7−2’、7−3、7−3’:カウンタウェイト
8−1、8−2、8−3:保持軸
9:駆動モータ
9a:回転板
10:制御回路
【特許請求の範囲】
【請求項1】
テーブルと、該テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、前記各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置の前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定する段階と、
前記第1の回転行列を用いて回転固定後に前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第1の射影方向を演算する段階と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の前記第1の射影方向を含む第1の平面を演算する段階と、
前記xyz座標系の第1の平面を前記第1の回転行列の逆行列を用いて前記123座標系の第1の平面に変換する段階と、
前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を前記第1の回転行列と異なる第2の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定する段階と、
前記第2の回転行列に用いた回転固定後に前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第2の射影方向を演算する段階と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の前記第2の射影方向を含む第2の平面を演算する段階と、
前記xyz座標系の第2の平面を前記第2の回転行列の逆行列を用いて前記123座標系の第2の平面に変換する段階と、
前記123座標系の第1、第2の平面の交線を前記加速度センサパッケージの各センサの主軸方向として演算する段階と
を具備する加速度センサ特性評価方法。
【請求項2】
前記xyz座標系の各第1、第2の平面は下記単位法線ベクトルni’
ni’ = ez×si’
但し、ezは前記xyz座標系のz軸の単位ベクトル、
si’は前記xyz座標系の前記各第1、第2の射影方向の単位ベクトル、
×は外積
によって演算される請求項1に記載の加速度センサ特性評価方法。
【請求項3】
前記123座標系の第1、第2の平面の交線は
si = ±(nia×nib)/|nia×nib|
但し、niaは変換された前記123座標系の第1の平面の単位法線ベクトル、
nibは変換された前記123座標系の第2の平面の単位法線ベクトル、
×は外積を表わす、
請求項1に記載の加速度センサ特性評価方法。
【請求項4】
さらに、前記加速度センサパッケージの各センサの主軸方向の単位ベクトルと前記等速円運動による入力加速度ベクトルとの内積に応じた前記各センサからの出力電圧によって感度を演算する段階を具備する請求項1に記載の加速度センサ特性評価方法。
【請求項5】
テーブルと、該テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、前記各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置の前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定した後に、前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第1の射影方向を演算する手順と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する手順と、
前記xyz座標系の第1の平面を前記第1の回転行列の逆行列を用いて前記123座標系の前記第1の平面に変換する手順と、
前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を前記第1の回転行列と異なる第2の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定した後に、前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第2の射影方向を演算する手順と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する手順と、
前記xyz座標系の第2の平面を前記第2の回転行列の逆行列を用いて前記123座標系の第2の平面に変換する手順と、
前記123座標系の第1、第2の平面の交線を前記加速度センサパッケージの各センサの主軸方向として演算する手順と
を具備する加速度センサ特性評価プログラム。
【請求項6】
前記xyz座標系の各第1、第2の平面は下記単位法線ベクトルni’
ni’ = ez×si’
但し、ezは前記xyz座標系のz軸の単位ベクトル、
si’は前記xyz座標系の前記各第1、第2の射影方向の単位ベクトル、
×は外積
によって演算される請求項5に記載の加速度センサ特性評価プログラム。
【請求項7】
前記123座標系の第1、第2の平面の交線は
si = ±(nia×nib)/|nia×nib|
但し、niaは変換された前記123座標系の第1の平面の単位法線ベクトル、
nibは変換された前記123座標系の第2の平面の単位法線ベクトル、
×は外積を表わす、
請求項5に記載の加速度センサ特性評価プログラム。
【請求項8】
さらに、前記加速度センサパッケージの各センサの主軸方向の単位ベクトルと前記等速円運動による入力加速度ベクトルとの内積に応じた前記各センサからの出力電圧によって感度を演算する手順を具備する請求項5に記載の加速度センサ特性評価プログラム。
【請求項1】
テーブルと、該テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、前記各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置の前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定する段階と、
前記第1の回転行列を用いて回転固定後に前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第1の射影方向を演算する段階と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の前記第1の射影方向を含む第1の平面を演算する段階と、
前記xyz座標系の第1の平面を前記第1の回転行列の逆行列を用いて前記123座標系の第1の平面に変換する段階と、
前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を前記第1の回転行列と異なる第2の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定する段階と、
前記第2の回転行列に用いた回転固定後に前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第2の射影方向を演算する段階と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の前記第2の射影方向を含む第2の平面を演算する段階と、
前記xyz座標系の第2の平面を前記第2の回転行列の逆行列を用いて前記123座標系の第2の平面に変換する段階と、
前記123座標系の第1、第2の平面の交線を前記加速度センサパッケージの各センサの主軸方向として演算する段階と
を具備する加速度センサ特性評価方法。
【請求項2】
前記xyz座標系の各第1、第2の平面は下記単位法線ベクトルni’
ni’ = ez×si’
但し、ezは前記xyz座標系のz軸の単位ベクトル、
si’は前記xyz座標系の前記各第1、第2の射影方向の単位ベクトル、
×は外積
によって演算される請求項1に記載の加速度センサ特性評価方法。
【請求項3】
前記123座標系の第1、第2の平面の交線は
si = ±(nia×nib)/|nia×nib|
但し、niaは変換された前記123座標系の第1の平面の単位法線ベクトル、
nibは変換された前記123座標系の第2の平面の単位法線ベクトル、
×は外積を表わす、
請求項1に記載の加速度センサ特性評価方法。
【請求項4】
さらに、前記加速度センサパッケージの各センサの主軸方向の単位ベクトルと前記等速円運動による入力加速度ベクトルとの内積に応じた前記各センサからの出力電圧によって感度を演算する段階を具備する請求項1に記載の加速度センサ特性評価方法。
【請求項5】
テーブルと、該テーブルに接続され、同一長さを有する、無限回転可能かつ平行の少なくとも2つのリンクと、前記各リンクを同期回転駆動させるための駆動手段とを有する加速度センサ特性評価装置の前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を第1の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定した後に、前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第1の射影方向を演算する手順と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の第1の射影方向を含む第1の平面を演算する手順と、
前記xyz座標系の第1の平面を前記第1の回転行列の逆行列を用いて前記123座標系の前記第1の平面に変換する手順と、
前記テーブルのxyz座標系に対して加速度センサパッケージの123座標系を前記第1の回転行列と異なる第2の回転行列を用いて回転させて該加速度センサパッケージを前記テーブルに固定した後に、前記テーブルを前記駆動手段によって前記xyz座標系のxy平面上で等速円運動による加振を行って前記加速度センサパッケージ内の各センサの正弦波状の出力電圧を用いて前記各センサの主軸方向の前記xyz座標系のxy平面上の第2の射影方向を演算する手順と、
前記xyz座標系のz軸及び前記xyz座標系のxy平面上の第2の射影方向を含む第2の平面を演算する手順と、
前記xyz座標系の第2の平面を前記第2の回転行列の逆行列を用いて前記123座標系の第2の平面に変換する手順と、
前記123座標系の第1、第2の平面の交線を前記加速度センサパッケージの各センサの主軸方向として演算する手順と
を具備する加速度センサ特性評価プログラム。
【請求項6】
前記xyz座標系の各第1、第2の平面は下記単位法線ベクトルni’
ni’ = ez×si’
但し、ezは前記xyz座標系のz軸の単位ベクトル、
si’は前記xyz座標系の前記各第1、第2の射影方向の単位ベクトル、
×は外積
によって演算される請求項5に記載の加速度センサ特性評価プログラム。
【請求項7】
前記123座標系の第1、第2の平面の交線は
si = ±(nia×nib)/|nia×nib|
但し、niaは変換された前記123座標系の第1の平面の単位法線ベクトル、
nibは変換された前記123座標系の第2の平面の単位法線ベクトル、
×は外積を表わす、
請求項5に記載の加速度センサ特性評価プログラム。
【請求項8】
さらに、前記加速度センサパッケージの各センサの主軸方向の単位ベクトルと前記等速円運動による入力加速度ベクトルとの内積に応じた前記各センサからの出力電圧によって感度を演算する手順を具備する請求項5に記載の加速度センサ特性評価プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−233842(P2012−233842A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−104119(P2011−104119)
【出願日】平成23年5月9日(2011.5.9)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【出願人】(390000804)白山工業株式会社 (9)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年5月9日(2011.5.9)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【出願人】(390000804)白山工業株式会社 (9)
[ Back to top ]