
加速度センサ
【課題】XY軸方向の加速度の検出感度に優れた加速度センサを提供する。
【解決手段】支持枠11と、支持枠11に対して変位可能に設けられた錘部12と支持枠11と錘部12と支持する可撓性を有する梁部13と、梁部13に、梁部13の幅方向の中心線上を含んで設けられている空隙部14と、梁部13に設けられているひずみ抵抗検出部Rとを備える加速度センサ10を構成する。
【解決手段】支持枠11と、支持枠11に対して変位可能に設けられた錘部12と支持枠11と錘部12と支持する可撓性を有する梁部13と、梁部13に、梁部13の幅方向の中心線上を含んで設けられている空隙部14と、梁部13に設けられているひずみ抵抗検出部Rとを備える加速度センサ10を構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、加速度センサに係わり、特に、シリコンひずみ抵抗素子を用いた3次元加速度センサに係わる。
【背景技術】
【0002】
現在、シリコンひずみを用いた3次元加速度センサとしては、稼働部である錘の動きを3次元的に検出する加速度センサが開発されている(例えば、特許文献1参照)。
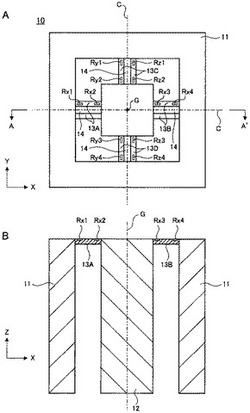
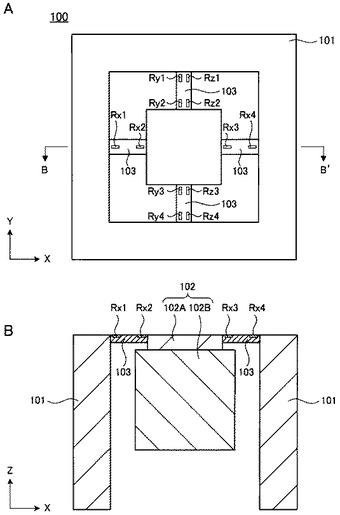
従来の加速度センサの構造の一例を図6に示す。図6Aは、加速度センサのXY軸方向の平面図であり、図6Bは、図6Aに示す加速度センサのB−B’線断面図である。図6中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
【0003】
図6に示す加速度センサ100は、シリコン基板を加工して形成された加速度センサであり、四角形状の支持枠101と、支持枠101から浮いた状態で指示される錘部102と、支持枠101と錘部102とを接続する可撓性を有する複数の梁部103とから形成されている。
また、梁部103の上面には、ピエゾ抵抗素子Rx、Ry、Rzが形成されている。
【0004】
また、図6Bに示すように、錘部102は、支持枠101及び梁部103と一体に形成されている錘支持部102Aと、この錘支持部に接着されているガラス等からなる錘固着部102Bとから構成されている。
【0005】
このような構成の加速度センサ100では、所定の方向に加速度が加わると、錘部102が変位し、梁部103に弾性変形(たわみ)が生じる。このとき、梁部103に形成されているピエゾ抵抗素子Rx、Ry、Rzの抵抗値が変化し、出力電圧が変化する。この出力電圧の変化を検知することにより、加速度センサに加えられた加速度を検出することができる。
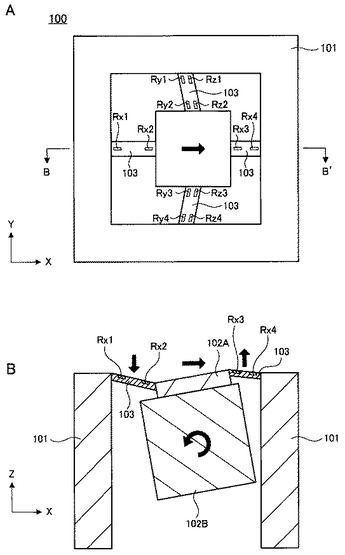
上述の構成の加速度装置において、XY軸方向は、図7A及び図7Bに示すように、4つの梁部203のたわみとして、ピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4、又は、ピエゾ抵抗素子Ry1、Ry2、Ry3、Ry4により各々の軸の逆相成分を検出している。
また、Z軸方向の加速度は、錘部102を支持している4つの梁部103により同相のたわみとして、ピエゾ抵抗素子Rz1、Rz2、Rz3、Rz4で検出している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−90975号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の構成の加速度センサは、特に、XY軸方向の加速度が加えられたときに、XY軸方向成分の感度が低い。
例えば、図7Aに示すように、X軸方向に加速度が加えられたときには、錘部102がX軸方向の加速度と逆相成分に変位する。このため、加速度方向の梁部103が、それぞれ伸縮する。また、錘部102は重心が梁部102との接続部分よりも下側にあるため、回転モーメントが発生する。そして、錘部図7Bに示すように、梁部103がそれぞれ、上下(Z)方向にひずむ。
このように、錘部102がX軸方向に変位したとき、Y軸方向の梁部103は、X軸方向に引っ張られると同時に、支持枠101と錘部102との間で、錘部102の回転によるねじり変形が発生する。
【0008】
加速度センサ100の梁部103は、例えばシリコン等からなり、支持枠101と錘部102とが一体に形成されている。このため、梁部103はねじれの許容範囲が小さく、梁部103がねじれた際の反力により、錘部102の変位の抵抗となる。例えば、上述のX軸方向に錘部102が変位した場合には、Y軸方向の梁部103が抵抗となり、X軸方向の変位量が小さくなる。また、同様のことがY軸方向の加速度に対しても発生する。
【0009】
このように、XY軸方向の加速度により錘部102が変位する際に、ねじれにくい構造の梁部103が錘部102の変位の抵抗となる。このため、加速度が加えられた方向の梁部にひずみが発生し難い。従って、X軸方向の加速度に対して、ピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4の間での抵抗値の変化量が小さくなり、検出感度が低下する。
上述のように、従来の構造の加速度センサでは、構造上XY軸方向の検出感度を高くすることが困難であった。
【0010】
上述した問題の解決のため、本発明においては、XY軸方向の加速度の検出感度に優れた加速度センサを提供するものである。
【課題を解決するための手段】
【0011】
本発明の加速度センサは、支持枠と、支持枠に対して変位可能に設けられた錘部と、支持枠と錘部とを支持する可撓性を有する梁部と、梁部の幅方向の中心線上を含んで梁部に設けられる空隙部と、梁部に設けられているひずみ抵抗検出部とを備えることを特徴とする。
【0012】
本発明の加速度センサによれば、加速度センサの梁部において、梁部の幅方向の中心線上に空隙を設けることにより、XY軸成分を検出する際、梁部にねじれを許容する構成となる。このように、梁部のねじり変形が容易な構造とすることで、錘部のXY軸方向の変位に対して梁部の抵抗が低減する。このため、特にXY軸方向の加速度に対して検出感度を向上させることができる。
【発明の効果】
【0013】
本発明によれば、XY軸方向の検出感度に優れる加速度センサを提供することができる。
【図面の簡単な説明】
【0014】
【図1】Aは本発明の加速度センサの実施の形態の構成を示す平面図である。Bは、本発明の加速度センサの実施の形態の構成を示す断面図である。
【図2】A,Bは、本発明の実施例の加速度センサのシミュレーション結果である。
【図3】A,Bは、比較例の加速度センサのシミュレーション結果である。
【図4】本発明の実施例の加速度センサのシミュレーション結果である。
【図5】本発明の実施例の加速度センサのシミュレーション結果である。
【図6】A,Bは、従来の加速度センサの構成図である。
【図7】A,Bは、従来の加速度センサの構成図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態の例を説明する。
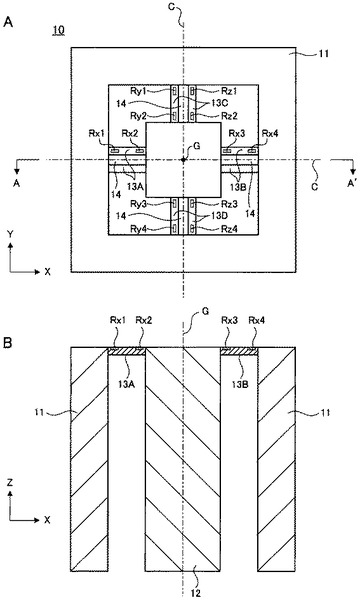
本実施の形態の加速度センサの構成図を図1に示す。図1Aは、加速度センサのXY軸方向の平面図であり、図1Bは、図1Aに示す加速度センサのA−A’線断面図である。図1では、図示するX軸、Y軸、Z軸からなるXYZ三次元座標系を定義している。図1中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
【0016】
図1に示す加速度センサ10は、シリコン基板を加工して形成された加速度センサであり、四角形状の支持枠11と、支持枠11から変位可能に浮いた状態で支持される錘部12と、支持枠11と錘部12とを接続する可撓性を有する複数の梁部13と、梁部13の幅方向の中心線C上に形成されている空隙部14とから構成されている。梁部13には、ひずみ抵抗検出部としてピエゾ抵抗素子Rが設けられている。
【0017】
加速度センサ10は、例えばシリコン等からなり、支持枠11、錘部12、及び、梁部13が一体に形成されている。
また、錘部12は、図1Bに示すようにZ軸方向の上面が、梁部13及び支持枠11と同一平面に形成され、Z軸方向の下方が梁部13に対して充分に深く形成されている。このため、錘部12は、梁部13と接続している位置よりも、充分に深い位置に重心を備えている。
【0018】
梁部13としては、錘部12に対してXY軸方向で対称な位置に、第1梁部13A、第2梁部13B,第3梁部13C,第4梁部13Dが形成されている。第1〜第4梁部13A,13B,13C,13Dは、それぞれ、支持枠11と錘部12との間において、直方体形状に形成されている。
また、梁部13には、支持枠11から錘部12までの全域にわたって空隙部14が形成され、さらに、Z軸方向に貫通して空隙部14が形成されている。このため、梁部13は、空隙部14により2本に分離されて構成されている。
【0019】
梁部13に設けられているピエゾ抵抗素子Rは、X軸方向、Y軸方向又はZ軸方向の加速度を検知するためのひずみ抵抗素子からなる。第1梁部13A及び第2梁部13Bの長手方向端部には、X軸方向の加速度を検知するためのピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4が形成されている。第3梁部13C及び第4梁部13Dの長手方向端部には、Y軸方向の加速度を検知するためのピエゾ抵抗素子Ry1、Ry2、Ry3、Ry4が形成されている。また、第3梁部13C及び第4梁部13Dの長手方向端部には、Z軸方向の加速度を検知するためのピエゾ抵抗素子Rz1、Rz2、Rz3、Rz4が形成されている。
なお、Z軸方向の加速度を検知するピエゾ抵抗素子は、X軸とY軸のどちらの梁部に形成してもよい。
【0020】
上述の構成の加速度センサでは、外力(加速度)が加わることにより、錘部12が変位し、第1〜第4梁部13A,13B,13C,13Dが変形する。この梁部の変形によりピエゾ抵抗素子の電気抵抗が変化する。そして、各軸のピエゾ抵抗素子Rx,Ry,Rzの4つの抵抗変化量の差により生じる電位差を検知することで加速度の値を検出することができる。
【0021】
次に、梁部13に設けられている空隙部14について説明する。
空隙部14は、梁部13の中心線C上に形成され、XY平面上において、空隙部14の長手方向と、梁部13の長手方向が、ほぼ同一の方向となるように、平行に形成されている。また、空隙部14は、梁部13の幅方向の中心線C上であり、上述のピエゾ抵抗素子Rx、Ry、Rzの形成領域外に設けられている。
【0022】
また、図1Aに示す加速度センサ10のXY軸平面上において、空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とが同一線上にあり、この中心線が錘部12の重心点を通ることが好ましい。つまり、図1Aに示す、梁部13の幅方向の中心線Cと、空隙部14の幅方向の中心線が同じ位置であり、さらに、梁部13の幅方向の中心線Cと、図1Bに示す錘部12のZ軸方向の重心線Gとが、交点を有することが好ましい。
【0023】
上記の位置に空隙部14を設けることにより、梁部13がねじれを許容しやすい構造となる。つまり、錘部12が外力により変位した際に、梁部13がねじり変形を起こしやすくなる。このため、例えば、X軸方向に外力が加えられたときに、Y軸方向の梁部による抵抗が減少し、X軸方向の梁部13の引っ張り変形及び圧縮変形が大きくなる。この結果、梁部13に形成されているピエゾ抵抗素子Rxで検知する抵抗値の変位量が大きくなり、加速度センサ10の感度が向上する。
【0024】
なお、空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とが厳密に同一線上にある必要はなく、ほぼ同じ方向で形成されていればよい。空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とがほぼ同じ方向となるように形成されていれば、梁部13において充分にねじれを許容することができる構造とすることができる。このため、上記の位置に空隙部14を設けることによる感度向上が可能な加速度センサを構成することができる。
【0025】
さらに、空隙部14は、梁部13において支持枠11から錘部12までの全域にわたって形成されていることが好ましい。さらに空隙部14がZ軸方向に貫通していることが好ましい。つまり、空隙部14を、梁部13において支持枠11から錘部12までの全域にわたって形成し、さらに、空隙部14がZ軸方向に貫通している構成とする。これにより、図1に示すように、梁部13が、空隙部14により、支持枠11と錘部12との間で分離された2本又は複数本に分離される構成となる。
また、空隙部14が梁部13のねじれ中心軸に形成されていることが好ましい。
【0026】
支持枠11と錘部12との間で、空隙部14により完全に分離された構成の梁部13を構成することにより、梁部13がねじり変形のより容易な構成となる。また、梁部13のねじれ中心軸が空隙部14となることにより、錘部12が回転運動をした際に、梁部13がねじれ中心軸に上下対称に変位しやすくなる。このため、梁部13がねじり変形の容易な構成となる。
【0027】
上述の構成の空隙部14は、錘部12と支持枠11との間において、梁部13のねじれを許容する構成である。図1に示す加速度センサにおいて、梁部13の幅方向の中心線上に空隙部14を設けることにより、X軸方向又はY軸方向に外力(加速度)が加わるとき、錘部がX軸又はY軸方向に変位した場合に、梁部13のうち外力が加わる方向の一対の梁部は引っ張り又は圧縮変形をするが、他の一対の梁部は引っ張り変形と共に錘部12の回転によるねじり変形をする。
このねじり変形をする際に、梁部13にねじれを許容する構成の空隙部14を設けておくことにより、梁部13が容易にねじり変形を許容することができる。例えば、空隙部14を挟んで梁部がそれぞれ上下に変位することができ、梁部13が容易にねじり変形する。
【0028】
このように、梁部をねじれやすい構造とすることにより、加速度センサに加わる外力が、外力が加わる方向以外の梁部のねじり変形の反力により吸収されず、錘部12の変位に対する抵抗を減少させることができる。このため、XY軸方向の外力に対して、錘部12の変位が大きくなり、ひずみ抵抗検出部において検知する抵抗値の変位量も大きくなる。従って、XY軸方向の加速度に対する加速度センサの感度を向上させることができる。
【0029】
次に、上述の本実施の形態の加速度センサの製造方法について説明する。
まず、シリコン等の半導体基板を準備する。そして、半導体基板の一方の主面側にフォトリソグラフィを用いてレジストパターンを形成する。レジストパターンは、支持枠、錘部、及び、梁部を形成する部分を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)等を用いて半導体基体をエッチングする。このときのエッチングは、梁部を形成する厚さと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
【0030】
次に、梁部に空隙部を形成する。
まず、フォトリソグラフィを用いて、半導体基体上にレジストパターンを形成する。このレジストパターンは、梁部に形成する空隙部以外を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)などを用いて半導体基体をエッチングする。このときのエッチングは、空隙部を形成する所定の深さまで行う。
【0031】
次に、加速度センサの所定の位置に、ひずみ抵抗検出部としてピエゾ抵抗素子を形成する。半導体基体に対してP型又はN型の不純物を注入して不純物ドープ層を形成する。この不純物ドープ層によりひずみ抵抗検出部(ピエゾ抵抗素子)を形成する。
なお、半導体基板の所定の領域に不純物ドープ層を形成する手法は、従来の半導体装置の製造方法と同様の方法により形成することができるため、詳細な説明は省略する。
【0032】
次に、半導体基板の他方の主面側(裏面側)から、Deep RIEによるエッチングを行う。
まず、半導体基板の裏面側に、フォトリソグラフィを用いてレジストパターンを形成する。このとき形成するレジストパターンは、支持枠、及び、錘部を形成する部分を覆うパターンとする。
次に、レジストパターンをマスクとして、Deep RIE法を用いて半導体基体をエッチングする。このときのエッチングは、上述の梁部を形成する工程において半導体基体をエッチングした位置まで行う。
Deep RIEは、エッチングステップとエッチング壁面保護ステップとを交互に行いながら、半導体基体をエッチングする方法である。エッチングステップは、例えば、主に六フッ化硫黄(SF6)を用いて等方エッチングを行う。また、保護ステップは、例えば、C4F8等のフッ素系ガスを用いて側壁を保護する。側壁を保護することで横方向のエッチングを抑制する。
この工程により、支持枠と錘部との間に、梁部を除く貫通穴を形成する。上述のDeep RIE法によるエッチングは、半導体基体の一方の主面側から梁部の厚さまでと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
【0033】
以上の工程により、本実施の形態の加速度センサを製造することができる。
なお、空隙部を、梁部のZ軸方向に貫通している構成とする場合には、上述の梁部を形成するためのエッチングと同時に行うことができる。例えば、半導体基板の一方の主面側にフォトリソグラフィを用いて支持枠、錘部、及び、梁部を形成する部分を覆い、空隙部を形成する部分が開口されたレジストパターンを形成する。そして、RIE等を用いて梁部を形成する厚さと同じ深さまで半導体基体をエッチングする。この工程により、半導体基板の一方の主面側に、梁部と空隙部とを同時に形成することができる。そして、上述の製造方法と同じ工程により、本実施の形態の加速度センサを製造することができる。
【0034】
また、梁部の厚さを正確に制御するためには、シリコン・オン・インシュレータ(SOI)基板を用いる。SOI基板は、シリコン基板上にインシュレータであるSiO2を約1−0.1μm形成され、さらに、SiO2上に単結晶シリコンを積層された構成を有する。SiO2上の単結晶シリコン層を活性層といい、この部分を梁部の形成に使用する。SOI基板を用いることにより、シリコン層をどちらの面からエッチングしてもSiO2をストッパ層として使用できる。
【0035】
まず、最初にSOI基板の活性層に支持部、梁部、鐘部、ひずみ抵抗検出部(ピエゾ抵抗素子)及び配線部を、エッチング等を用いて形成する。その後、シリコン基板側から支持部と錘部を残してdeep−RIEエッチングする。なお、deep−RIEエッチングでは、上述のようにSiO2を用いてストッパ層とすることができる。また、SOI基板の活性層の厚さが梁部の厚さとなるので、活性層の厚さが重要である。
以上のように、SOI基板を用いると精度良く加速度センサを製造することができる。
【0036】
ひずみ抵抗検出部(ピエゾ抵抗素子)は、B(ボロン)等のシリコン半導体の不純物原子をイオンインプンテーショ法、又は、熱拡散法を用いて梁部にドープすることで、部分的にp型又はn型の半導体部分を作製する。そして、形成したp型又はn型の半導体部分の両端部に、電極を作製する。ひずみ抵抗検出部(ピエゾ抵抗素子)の抵抗値は100Ωから50Ω程度が望ましい。
【実施例】
【0037】
以下、実施例により本発明を具体的に説明する。
(実施例1)
上述の実施の形態の加速度センサについて、以下の構成の加速度センサによるシミュレーションを行った。
錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、梁部の長さが50μmであり、空隙が設けられている部分の梁部の幅は10μmであり、梁部の幅の合計は20μmであり、空隙部の幅方向の長さが10μmである。
また、比較として、図6に示す、梁部に空隙部を設けていない従来構造の加速度センサを作製した。作製した比較例の加速度センサの各構成のサイズを示す。錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、錘部と梁部との距離が50μmであり、梁部の幅が20μmである。
【0038】
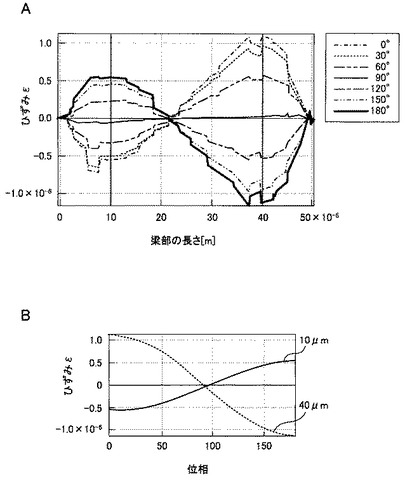
上述の実施例及び比較例の加速度センサについて、加速度と梁部のひずみの関係についてシミュレーションを行った。加速度センサに対して加速度(1G)を加える方向を変化させたときの梁部13Aの各位置でのひずみを表したシミュレーションの結果を図2Aに示している。シミュレーションでは、外力を加える方向を、X軸に平行な方向を0°とし、Y軸に平行な方向を90°とした。そして、X軸方向からY軸方向に90°角度を変化させた後、さらにY軸方向からX軸方向に、90°から180°まで角度を変化させた。
【0039】
図2Aにおいて、縦軸は、梁部13Aのひずみεを示している。また、横軸は、梁部13Aの支持枠11において、支持枠11側の接続部を0μm(0m)とし、錘部12側の接続分を50μm(50×10−6m)として表している。従って、梁部13Aの支持枠11からの距離に対応する位置において、外力の角度により発生したひずみの量がわかる。
図2Bは、上記の実施例の加速度センサのシミュレーションにおいて、梁部13Aにおいて大きくひずみが発生した支持枠11から10μmの位置と、40μmの位置でのひずみを表している。図2Bは、縦軸に梁部13Aのひずみεを示している。また、横軸に、加速度センサに加える外力の角度(位相)を示している。
また、比較例の加速度センサについて、上述の実施例の加速度センサと同様にシミュレーションを行った結果を図3A,Bに示す。
【0040】
図2及び図3に示す結果から、梁部に空隙部を設ける構成とした実施例の加速度センサの方が、比較例の加速度センサよりも、XY成分のひずみが1.5倍発生することがわかった。
梁部に空隙部を設ける構成とすることにより、加速度センサにXY成分の加速度が加わると、錘部は回転運動をする。このとき、梁部に空隙部が設けられていると、この空隙部を中心軸として回転しやすくなる。つまり、加速度センサの4つの梁部に空隙部を設けることにより、この空隙部を中心軸としてXY軸に回転しやすくなる。これをXY成分に平行な梁でひずみを測るとシミュレーションでは、空隙部を設けない構成とした場合に比べ、約1.5倍のひずみが発生することが分かる。従って、梁部に空隙部を設ける構成とすることにより、非常に効果かがあることがわかる。
【0041】
(実施例2)
加速度センサにおいて、空隙部の幅方向の長さを変化させたときのひずみεをシミュレーションを行った。実施例1と同様の図1に示す構成の加速度センサを、梁部の幅方向の空隙部の長さを変化させて作製した。
【0042】
作製した加速度センサの各構成は、錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、錘部と梁部との距離が50μmであり、空隙が設けられている部分の梁部の幅は10μmであり、梁部の幅の合計は20μmであり、幅方向の空隙部の長さは0〜80μmである。ここで、梁部の幅方向の空隙部の長さが0という構成は、空隙部を設けていない構成であり、図6に示す従来の加速度センサと同じ構成である。
【0043】
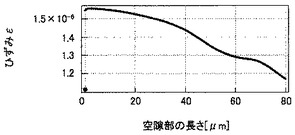
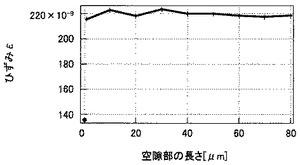
上記の空隙部の長さが異なるそれぞれの加速度センサに対して、X軸方向に1Gの加速度を加えたときのシミュレーション結果を図4に示す。また、Z軸方向に1Gの加速度を加えたときのシミュレーション結果を図5に示す。
【0044】
図4に示す結果から、X軸方向に加速度を加えたときは、空隙部を設けない構成、つまり空隙部の長さが0の加速度センサに対して、空隙部を設けた加速度センサの方が、ひずみが大きくなった。この結果から、梁部に空隙部を設けることにより、梁部に発生するひずみが大きくなり、梁部に形成されているひずみ抵抗検出部(ピエゾ抵抗素子)で検知する抵抗値の変位量が大きくなる。従って、加速度センサの感度を向上させることができる。
【0045】
また、図4から、空隙部は、梁部の幅方向の長さが小さいほど、XY軸方向に加速度が加えられた際に梁部に発生するひずみが大きくなる結果が得られた。梁部は、錘部の重心点に近く形成されている方が、ねじれ変形が起きやすく、錘部の重心点から離れて形成されるほど、ねじれ変形が起き難くなると考えられる。
【0046】
また、図5に示す結果から、空隙部の長さが0の加速度センサに対して、空隙部を設けることによりZ軸方向の加速度に対しても感度が向上することが分かる。そして、梁部の幅方向の長さを変えて空隙部を形成しても、Z軸方向のひずみはほとんど変化していない。
このように、梁部に空隙部を設けることにより、Z軸方向の加速度に対しても、加速度センサの検出感度を向上させることができる。
【0047】
また、梁部に形成する空隙部の大きさを変えることにより、XY軸方向の加速度に対する梁部のひずみを制御することができるため、加速度センサのXY軸方向の感度を任意に設定することができる。さらに、空隙部の大きさを変えた場合にも、Z軸方向の加速度に対する感度は変化しない。このため、空隙部の構成を変化させることにより、XY軸方向の加速度に対する感度と、Z軸方向の加速度に対する感度とを調整することが可能である。
【0048】
なお、上述の実施の形態では、錘部の形状を正方形状として説明しているが、一般的に加速度センサに適用されている錘部の形状であれば、上記の正方形に限定されずに本発明に適用することができる。また、上述の実施の形態では、梁部を対称形状、直方体形状に形成しているが、一般的に加速度センサに適用されている錘部の形状であれば、上記の正方形に限定されずに本発明に適用することができる。特に、XY軸方向に外力が加わった際に、錘部の変位により梁部にねじり変形が発生する構造の加速度センサにおいて、本発明を好ましく適用することができる。
【0049】
上述の梁部に空隙部を設けるのは、X,Y,Z軸のいずれか1軸を測定できる1軸加速度センサ、X,Y,Z軸のいずれか2軸を測定できる2軸加速度センサ、X,Y,Z軸の全てを測定できる3軸加速度センサに適用できる。
【0050】
なお、本発明は上述の実施形態例において説明した構成に限定されるものではなく、その他本発明構成を逸脱しない範囲において種々の変形、変更が可能である。
【符号の説明】
【0051】
10,100 加速度センサ、11,101 支持枠、12,102 錘部、13,13A,13B,13C,13D,103 梁部、14 空隙部、102A 錘支持部、102B 錘固着部、C 中心線、G 重心線、R,Rx,Rx1,Rx2,Rx3,Rx4,Ry,Ry1,Ry2,Ry3,Ry4,Rz,Rz1,Rz2,Rz3,Rz4 ピエゾ抵抗素子
【技術分野】
【0001】
本発明は、加速度センサに係わり、特に、シリコンひずみ抵抗素子を用いた3次元加速度センサに係わる。
【背景技術】
【0002】
現在、シリコンひずみを用いた3次元加速度センサとしては、稼働部である錘の動きを3次元的に検出する加速度センサが開発されている(例えば、特許文献1参照)。
従来の加速度センサの構造の一例を図6に示す。図6Aは、加速度センサのXY軸方向の平面図であり、図6Bは、図6Aに示す加速度センサのB−B’線断面図である。図6中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
【0003】
図6に示す加速度センサ100は、シリコン基板を加工して形成された加速度センサであり、四角形状の支持枠101と、支持枠101から浮いた状態で指示される錘部102と、支持枠101と錘部102とを接続する可撓性を有する複数の梁部103とから形成されている。
また、梁部103の上面には、ピエゾ抵抗素子Rx、Ry、Rzが形成されている。
【0004】
また、図6Bに示すように、錘部102は、支持枠101及び梁部103と一体に形成されている錘支持部102Aと、この錘支持部に接着されているガラス等からなる錘固着部102Bとから構成されている。
【0005】
このような構成の加速度センサ100では、所定の方向に加速度が加わると、錘部102が変位し、梁部103に弾性変形(たわみ)が生じる。このとき、梁部103に形成されているピエゾ抵抗素子Rx、Ry、Rzの抵抗値が変化し、出力電圧が変化する。この出力電圧の変化を検知することにより、加速度センサに加えられた加速度を検出することができる。
上述の構成の加速度装置において、XY軸方向は、図7A及び図7Bに示すように、4つの梁部203のたわみとして、ピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4、又は、ピエゾ抵抗素子Ry1、Ry2、Ry3、Ry4により各々の軸の逆相成分を検出している。
また、Z軸方向の加速度は、錘部102を支持している4つの梁部103により同相のたわみとして、ピエゾ抵抗素子Rz1、Rz2、Rz3、Rz4で検出している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−90975号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の構成の加速度センサは、特に、XY軸方向の加速度が加えられたときに、XY軸方向成分の感度が低い。
例えば、図7Aに示すように、X軸方向に加速度が加えられたときには、錘部102がX軸方向の加速度と逆相成分に変位する。このため、加速度方向の梁部103が、それぞれ伸縮する。また、錘部102は重心が梁部102との接続部分よりも下側にあるため、回転モーメントが発生する。そして、錘部図7Bに示すように、梁部103がそれぞれ、上下(Z)方向にひずむ。
このように、錘部102がX軸方向に変位したとき、Y軸方向の梁部103は、X軸方向に引っ張られると同時に、支持枠101と錘部102との間で、錘部102の回転によるねじり変形が発生する。
【0008】
加速度センサ100の梁部103は、例えばシリコン等からなり、支持枠101と錘部102とが一体に形成されている。このため、梁部103はねじれの許容範囲が小さく、梁部103がねじれた際の反力により、錘部102の変位の抵抗となる。例えば、上述のX軸方向に錘部102が変位した場合には、Y軸方向の梁部103が抵抗となり、X軸方向の変位量が小さくなる。また、同様のことがY軸方向の加速度に対しても発生する。
【0009】
このように、XY軸方向の加速度により錘部102が変位する際に、ねじれにくい構造の梁部103が錘部102の変位の抵抗となる。このため、加速度が加えられた方向の梁部にひずみが発生し難い。従って、X軸方向の加速度に対して、ピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4の間での抵抗値の変化量が小さくなり、検出感度が低下する。
上述のように、従来の構造の加速度センサでは、構造上XY軸方向の検出感度を高くすることが困難であった。
【0010】
上述した問題の解決のため、本発明においては、XY軸方向の加速度の検出感度に優れた加速度センサを提供するものである。
【課題を解決するための手段】
【0011】
本発明の加速度センサは、支持枠と、支持枠に対して変位可能に設けられた錘部と、支持枠と錘部とを支持する可撓性を有する梁部と、梁部の幅方向の中心線上を含んで梁部に設けられる空隙部と、梁部に設けられているひずみ抵抗検出部とを備えることを特徴とする。
【0012】
本発明の加速度センサによれば、加速度センサの梁部において、梁部の幅方向の中心線上に空隙を設けることにより、XY軸成分を検出する際、梁部にねじれを許容する構成となる。このように、梁部のねじり変形が容易な構造とすることで、錘部のXY軸方向の変位に対して梁部の抵抗が低減する。このため、特にXY軸方向の加速度に対して検出感度を向上させることができる。
【発明の効果】
【0013】
本発明によれば、XY軸方向の検出感度に優れる加速度センサを提供することができる。
【図面の簡単な説明】
【0014】
【図1】Aは本発明の加速度センサの実施の形態の構成を示す平面図である。Bは、本発明の加速度センサの実施の形態の構成を示す断面図である。
【図2】A,Bは、本発明の実施例の加速度センサのシミュレーション結果である。
【図3】A,Bは、比較例の加速度センサのシミュレーション結果である。
【図4】本発明の実施例の加速度センサのシミュレーション結果である。
【図5】本発明の実施例の加速度センサのシミュレーション結果である。
【図6】A,Bは、従来の加速度センサの構成図である。
【図7】A,Bは、従来の加速度センサの構成図である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態の例を説明する。
本実施の形態の加速度センサの構成図を図1に示す。図1Aは、加速度センサのXY軸方向の平面図であり、図1Bは、図1Aに示す加速度センサのA−A’線断面図である。図1では、図示するX軸、Y軸、Z軸からなるXYZ三次元座標系を定義している。図1中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
【0016】
図1に示す加速度センサ10は、シリコン基板を加工して形成された加速度センサであり、四角形状の支持枠11と、支持枠11から変位可能に浮いた状態で支持される錘部12と、支持枠11と錘部12とを接続する可撓性を有する複数の梁部13と、梁部13の幅方向の中心線C上に形成されている空隙部14とから構成されている。梁部13には、ひずみ抵抗検出部としてピエゾ抵抗素子Rが設けられている。
【0017】
加速度センサ10は、例えばシリコン等からなり、支持枠11、錘部12、及び、梁部13が一体に形成されている。
また、錘部12は、図1Bに示すようにZ軸方向の上面が、梁部13及び支持枠11と同一平面に形成され、Z軸方向の下方が梁部13に対して充分に深く形成されている。このため、錘部12は、梁部13と接続している位置よりも、充分に深い位置に重心を備えている。
【0018】
梁部13としては、錘部12に対してXY軸方向で対称な位置に、第1梁部13A、第2梁部13B,第3梁部13C,第4梁部13Dが形成されている。第1〜第4梁部13A,13B,13C,13Dは、それぞれ、支持枠11と錘部12との間において、直方体形状に形成されている。
また、梁部13には、支持枠11から錘部12までの全域にわたって空隙部14が形成され、さらに、Z軸方向に貫通して空隙部14が形成されている。このため、梁部13は、空隙部14により2本に分離されて構成されている。
【0019】
梁部13に設けられているピエゾ抵抗素子Rは、X軸方向、Y軸方向又はZ軸方向の加速度を検知するためのひずみ抵抗素子からなる。第1梁部13A及び第2梁部13Bの長手方向端部には、X軸方向の加速度を検知するためのピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4が形成されている。第3梁部13C及び第4梁部13Dの長手方向端部には、Y軸方向の加速度を検知するためのピエゾ抵抗素子Ry1、Ry2、Ry3、Ry4が形成されている。また、第3梁部13C及び第4梁部13Dの長手方向端部には、Z軸方向の加速度を検知するためのピエゾ抵抗素子Rz1、Rz2、Rz3、Rz4が形成されている。
なお、Z軸方向の加速度を検知するピエゾ抵抗素子は、X軸とY軸のどちらの梁部に形成してもよい。
【0020】
上述の構成の加速度センサでは、外力(加速度)が加わることにより、錘部12が変位し、第1〜第4梁部13A,13B,13C,13Dが変形する。この梁部の変形によりピエゾ抵抗素子の電気抵抗が変化する。そして、各軸のピエゾ抵抗素子Rx,Ry,Rzの4つの抵抗変化量の差により生じる電位差を検知することで加速度の値を検出することができる。
【0021】
次に、梁部13に設けられている空隙部14について説明する。
空隙部14は、梁部13の中心線C上に形成され、XY平面上において、空隙部14の長手方向と、梁部13の長手方向が、ほぼ同一の方向となるように、平行に形成されている。また、空隙部14は、梁部13の幅方向の中心線C上であり、上述のピエゾ抵抗素子Rx、Ry、Rzの形成領域外に設けられている。
【0022】
また、図1Aに示す加速度センサ10のXY軸平面上において、空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とが同一線上にあり、この中心線が錘部12の重心点を通ることが好ましい。つまり、図1Aに示す、梁部13の幅方向の中心線Cと、空隙部14の幅方向の中心線が同じ位置であり、さらに、梁部13の幅方向の中心線Cと、図1Bに示す錘部12のZ軸方向の重心線Gとが、交点を有することが好ましい。
【0023】
上記の位置に空隙部14を設けることにより、梁部13がねじれを許容しやすい構造となる。つまり、錘部12が外力により変位した際に、梁部13がねじり変形を起こしやすくなる。このため、例えば、X軸方向に外力が加えられたときに、Y軸方向の梁部による抵抗が減少し、X軸方向の梁部13の引っ張り変形及び圧縮変形が大きくなる。この結果、梁部13に形成されているピエゾ抵抗素子Rxで検知する抵抗値の変位量が大きくなり、加速度センサ10の感度が向上する。
【0024】
なお、空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とが厳密に同一線上にある必要はなく、ほぼ同じ方向で形成されていればよい。空隙部14の幅方向の中心線と、梁部13の幅方向の中心線とがほぼ同じ方向となるように形成されていれば、梁部13において充分にねじれを許容することができる構造とすることができる。このため、上記の位置に空隙部14を設けることによる感度向上が可能な加速度センサを構成することができる。
【0025】
さらに、空隙部14は、梁部13において支持枠11から錘部12までの全域にわたって形成されていることが好ましい。さらに空隙部14がZ軸方向に貫通していることが好ましい。つまり、空隙部14を、梁部13において支持枠11から錘部12までの全域にわたって形成し、さらに、空隙部14がZ軸方向に貫通している構成とする。これにより、図1に示すように、梁部13が、空隙部14により、支持枠11と錘部12との間で分離された2本又は複数本に分離される構成となる。
また、空隙部14が梁部13のねじれ中心軸に形成されていることが好ましい。
【0026】
支持枠11と錘部12との間で、空隙部14により完全に分離された構成の梁部13を構成することにより、梁部13がねじり変形のより容易な構成となる。また、梁部13のねじれ中心軸が空隙部14となることにより、錘部12が回転運動をした際に、梁部13がねじれ中心軸に上下対称に変位しやすくなる。このため、梁部13がねじり変形の容易な構成となる。
【0027】
上述の構成の空隙部14は、錘部12と支持枠11との間において、梁部13のねじれを許容する構成である。図1に示す加速度センサにおいて、梁部13の幅方向の中心線上に空隙部14を設けることにより、X軸方向又はY軸方向に外力(加速度)が加わるとき、錘部がX軸又はY軸方向に変位した場合に、梁部13のうち外力が加わる方向の一対の梁部は引っ張り又は圧縮変形をするが、他の一対の梁部は引っ張り変形と共に錘部12の回転によるねじり変形をする。
このねじり変形をする際に、梁部13にねじれを許容する構成の空隙部14を設けておくことにより、梁部13が容易にねじり変形を許容することができる。例えば、空隙部14を挟んで梁部がそれぞれ上下に変位することができ、梁部13が容易にねじり変形する。
【0028】
このように、梁部をねじれやすい構造とすることにより、加速度センサに加わる外力が、外力が加わる方向以外の梁部のねじり変形の反力により吸収されず、錘部12の変位に対する抵抗を減少させることができる。このため、XY軸方向の外力に対して、錘部12の変位が大きくなり、ひずみ抵抗検出部において検知する抵抗値の変位量も大きくなる。従って、XY軸方向の加速度に対する加速度センサの感度を向上させることができる。
【0029】
次に、上述の本実施の形態の加速度センサの製造方法について説明する。
まず、シリコン等の半導体基板を準備する。そして、半導体基板の一方の主面側にフォトリソグラフィを用いてレジストパターンを形成する。レジストパターンは、支持枠、錘部、及び、梁部を形成する部分を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)等を用いて半導体基体をエッチングする。このときのエッチングは、梁部を形成する厚さと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
【0030】
次に、梁部に空隙部を形成する。
まず、フォトリソグラフィを用いて、半導体基体上にレジストパターンを形成する。このレジストパターンは、梁部に形成する空隙部以外を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)などを用いて半導体基体をエッチングする。このときのエッチングは、空隙部を形成する所定の深さまで行う。
【0031】
次に、加速度センサの所定の位置に、ひずみ抵抗検出部としてピエゾ抵抗素子を形成する。半導体基体に対してP型又はN型の不純物を注入して不純物ドープ層を形成する。この不純物ドープ層によりひずみ抵抗検出部(ピエゾ抵抗素子)を形成する。
なお、半導体基板の所定の領域に不純物ドープ層を形成する手法は、従来の半導体装置の製造方法と同様の方法により形成することができるため、詳細な説明は省略する。
【0032】
次に、半導体基板の他方の主面側(裏面側)から、Deep RIEによるエッチングを行う。
まず、半導体基板の裏面側に、フォトリソグラフィを用いてレジストパターンを形成する。このとき形成するレジストパターンは、支持枠、及び、錘部を形成する部分を覆うパターンとする。
次に、レジストパターンをマスクとして、Deep RIE法を用いて半導体基体をエッチングする。このときのエッチングは、上述の梁部を形成する工程において半導体基体をエッチングした位置まで行う。
Deep RIEは、エッチングステップとエッチング壁面保護ステップとを交互に行いながら、半導体基体をエッチングする方法である。エッチングステップは、例えば、主に六フッ化硫黄(SF6)を用いて等方エッチングを行う。また、保護ステップは、例えば、C4F8等のフッ素系ガスを用いて側壁を保護する。側壁を保護することで横方向のエッチングを抑制する。
この工程により、支持枠と錘部との間に、梁部を除く貫通穴を形成する。上述のDeep RIE法によるエッチングは、半導体基体の一方の主面側から梁部の厚さまでと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
【0033】
以上の工程により、本実施の形態の加速度センサを製造することができる。
なお、空隙部を、梁部のZ軸方向に貫通している構成とする場合には、上述の梁部を形成するためのエッチングと同時に行うことができる。例えば、半導体基板の一方の主面側にフォトリソグラフィを用いて支持枠、錘部、及び、梁部を形成する部分を覆い、空隙部を形成する部分が開口されたレジストパターンを形成する。そして、RIE等を用いて梁部を形成する厚さと同じ深さまで半導体基体をエッチングする。この工程により、半導体基板の一方の主面側に、梁部と空隙部とを同時に形成することができる。そして、上述の製造方法と同じ工程により、本実施の形態の加速度センサを製造することができる。
【0034】
また、梁部の厚さを正確に制御するためには、シリコン・オン・インシュレータ(SOI)基板を用いる。SOI基板は、シリコン基板上にインシュレータであるSiO2を約1−0.1μm形成され、さらに、SiO2上に単結晶シリコンを積層された構成を有する。SiO2上の単結晶シリコン層を活性層といい、この部分を梁部の形成に使用する。SOI基板を用いることにより、シリコン層をどちらの面からエッチングしてもSiO2をストッパ層として使用できる。
【0035】
まず、最初にSOI基板の活性層に支持部、梁部、鐘部、ひずみ抵抗検出部(ピエゾ抵抗素子)及び配線部を、エッチング等を用いて形成する。その後、シリコン基板側から支持部と錘部を残してdeep−RIEエッチングする。なお、deep−RIEエッチングでは、上述のようにSiO2を用いてストッパ層とすることができる。また、SOI基板の活性層の厚さが梁部の厚さとなるので、活性層の厚さが重要である。
以上のように、SOI基板を用いると精度良く加速度センサを製造することができる。
【0036】
ひずみ抵抗検出部(ピエゾ抵抗素子)は、B(ボロン)等のシリコン半導体の不純物原子をイオンインプンテーショ法、又は、熱拡散法を用いて梁部にドープすることで、部分的にp型又はn型の半導体部分を作製する。そして、形成したp型又はn型の半導体部分の両端部に、電極を作製する。ひずみ抵抗検出部(ピエゾ抵抗素子)の抵抗値は100Ωから50Ω程度が望ましい。
【実施例】
【0037】
以下、実施例により本発明を具体的に説明する。
(実施例1)
上述の実施の形態の加速度センサについて、以下の構成の加速度センサによるシミュレーションを行った。
錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、梁部の長さが50μmであり、空隙が設けられている部分の梁部の幅は10μmであり、梁部の幅の合計は20μmであり、空隙部の幅方向の長さが10μmである。
また、比較として、図6に示す、梁部に空隙部を設けていない従来構造の加速度センサを作製した。作製した比較例の加速度センサの各構成のサイズを示す。錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、錘部と梁部との距離が50μmであり、梁部の幅が20μmである。
【0038】
上述の実施例及び比較例の加速度センサについて、加速度と梁部のひずみの関係についてシミュレーションを行った。加速度センサに対して加速度(1G)を加える方向を変化させたときの梁部13Aの各位置でのひずみを表したシミュレーションの結果を図2Aに示している。シミュレーションでは、外力を加える方向を、X軸に平行な方向を0°とし、Y軸に平行な方向を90°とした。そして、X軸方向からY軸方向に90°角度を変化させた後、さらにY軸方向からX軸方向に、90°から180°まで角度を変化させた。
【0039】
図2Aにおいて、縦軸は、梁部13Aのひずみεを示している。また、横軸は、梁部13Aの支持枠11において、支持枠11側の接続部を0μm(0m)とし、錘部12側の接続分を50μm(50×10−6m)として表している。従って、梁部13Aの支持枠11からの距離に対応する位置において、外力の角度により発生したひずみの量がわかる。
図2Bは、上記の実施例の加速度センサのシミュレーションにおいて、梁部13Aにおいて大きくひずみが発生した支持枠11から10μmの位置と、40μmの位置でのひずみを表している。図2Bは、縦軸に梁部13Aのひずみεを示している。また、横軸に、加速度センサに加える外力の角度(位相)を示している。
また、比較例の加速度センサについて、上述の実施例の加速度センサと同様にシミュレーションを行った結果を図3A,Bに示す。
【0040】
図2及び図3に示す結果から、梁部に空隙部を設ける構成とした実施例の加速度センサの方が、比較例の加速度センサよりも、XY成分のひずみが1.5倍発生することがわかった。
梁部に空隙部を設ける構成とすることにより、加速度センサにXY成分の加速度が加わると、錘部は回転運動をする。このとき、梁部に空隙部が設けられていると、この空隙部を中心軸として回転しやすくなる。つまり、加速度センサの4つの梁部に空隙部を設けることにより、この空隙部を中心軸としてXY軸に回転しやすくなる。これをXY成分に平行な梁でひずみを測るとシミュレーションでは、空隙部を設けない構成とした場合に比べ、約1.5倍のひずみが発生することが分かる。従って、梁部に空隙部を設ける構成とすることにより、非常に効果かがあることがわかる。
【0041】
(実施例2)
加速度センサにおいて、空隙部の幅方向の長さを変化させたときのひずみεをシミュレーションを行った。実施例1と同様の図1に示す構成の加速度センサを、梁部の幅方向の空隙部の長さを変化させて作製した。
【0042】
作製した加速度センサの各構成は、錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、錘部と梁部との距離が50μmであり、空隙が設けられている部分の梁部の幅は10μmであり、梁部の幅の合計は20μmであり、幅方向の空隙部の長さは0〜80μmである。ここで、梁部の幅方向の空隙部の長さが0という構成は、空隙部を設けていない構成であり、図6に示す従来の加速度センサと同じ構成である。
【0043】
上記の空隙部の長さが異なるそれぞれの加速度センサに対して、X軸方向に1Gの加速度を加えたときのシミュレーション結果を図4に示す。また、Z軸方向に1Gの加速度を加えたときのシミュレーション結果を図5に示す。
【0044】
図4に示す結果から、X軸方向に加速度を加えたときは、空隙部を設けない構成、つまり空隙部の長さが0の加速度センサに対して、空隙部を設けた加速度センサの方が、ひずみが大きくなった。この結果から、梁部に空隙部を設けることにより、梁部に発生するひずみが大きくなり、梁部に形成されているひずみ抵抗検出部(ピエゾ抵抗素子)で検知する抵抗値の変位量が大きくなる。従って、加速度センサの感度を向上させることができる。
【0045】
また、図4から、空隙部は、梁部の幅方向の長さが小さいほど、XY軸方向に加速度が加えられた際に梁部に発生するひずみが大きくなる結果が得られた。梁部は、錘部の重心点に近く形成されている方が、ねじれ変形が起きやすく、錘部の重心点から離れて形成されるほど、ねじれ変形が起き難くなると考えられる。
【0046】
また、図5に示す結果から、空隙部の長さが0の加速度センサに対して、空隙部を設けることによりZ軸方向の加速度に対しても感度が向上することが分かる。そして、梁部の幅方向の長さを変えて空隙部を形成しても、Z軸方向のひずみはほとんど変化していない。
このように、梁部に空隙部を設けることにより、Z軸方向の加速度に対しても、加速度センサの検出感度を向上させることができる。
【0047】
また、梁部に形成する空隙部の大きさを変えることにより、XY軸方向の加速度に対する梁部のひずみを制御することができるため、加速度センサのXY軸方向の感度を任意に設定することができる。さらに、空隙部の大きさを変えた場合にも、Z軸方向の加速度に対する感度は変化しない。このため、空隙部の構成を変化させることにより、XY軸方向の加速度に対する感度と、Z軸方向の加速度に対する感度とを調整することが可能である。
【0048】
なお、上述の実施の形態では、錘部の形状を正方形状として説明しているが、一般的に加速度センサに適用されている錘部の形状であれば、上記の正方形に限定されずに本発明に適用することができる。また、上述の実施の形態では、梁部を対称形状、直方体形状に形成しているが、一般的に加速度センサに適用されている錘部の形状であれば、上記の正方形に限定されずに本発明に適用することができる。特に、XY軸方向に外力が加わった際に、錘部の変位により梁部にねじり変形が発生する構造の加速度センサにおいて、本発明を好ましく適用することができる。
【0049】
上述の梁部に空隙部を設けるのは、X,Y,Z軸のいずれか1軸を測定できる1軸加速度センサ、X,Y,Z軸のいずれか2軸を測定できる2軸加速度センサ、X,Y,Z軸の全てを測定できる3軸加速度センサに適用できる。
【0050】
なお、本発明は上述の実施形態例において説明した構成に限定されるものではなく、その他本発明構成を逸脱しない範囲において種々の変形、変更が可能である。
【符号の説明】
【0051】
10,100 加速度センサ、11,101 支持枠、12,102 錘部、13,13A,13B,13C,13D,103 梁部、14 空隙部、102A 錘支持部、102B 錘固着部、C 中心線、G 重心線、R,Rx,Rx1,Rx2,Rx3,Rx4,Ry,Ry1,Ry2,Ry3,Ry4,Rz,Rz1,Rz2,Rz3,Rz4 ピエゾ抵抗素子
【特許請求の範囲】
【請求項1】
支持枠と、
前記支持枠に対して変位可能に設けられた錘部と
前記支持枠と前記錘部と支持する可撓性を有する梁部と、
前記梁部に、前記梁部の幅方向の中心線上を含んで設けられている空隙部と、
前記梁部に設けられているひずみ抵抗検出部とを備える
ことを特徴とする加速度センサ。
【請求項2】
前記梁部の幅方向の中心線と、前記空隙部の幅方向の中心線がほぼ同じ方向であるように前記空隙が設けられていることを特徴とする請求項1に記載の加速度センサ。
【請求項3】
前記空隙部の幅方向の中心線が、前記錘部の重心点を通るように前記空隙が設けられていること特徴とする請求項1又は2に記載の加速度センサ。
【請求項4】
前記空隙が、前記梁部のねじれ中心軸を含んで設けられていることを特徴とする請求項1〜3のいずれかに記載の加速度センサ。
【請求項5】
前記梁部が、前記空隙部により複数本に分離されていることを特徴とする請求項1〜4のいずれかに記載の加速度センサ。
【請求項6】
前記ひずみ抵抗検出部がピエゾ抵抗素子からなることを特徴とする請求項1〜5のいずれかに記載の加速度センサ。
【請求項1】
支持枠と、
前記支持枠に対して変位可能に設けられた錘部と
前記支持枠と前記錘部と支持する可撓性を有する梁部と、
前記梁部に、前記梁部の幅方向の中心線上を含んで設けられている空隙部と、
前記梁部に設けられているひずみ抵抗検出部とを備える
ことを特徴とする加速度センサ。
【請求項2】
前記梁部の幅方向の中心線と、前記空隙部の幅方向の中心線がほぼ同じ方向であるように前記空隙が設けられていることを特徴とする請求項1に記載の加速度センサ。
【請求項3】
前記空隙部の幅方向の中心線が、前記錘部の重心点を通るように前記空隙が設けられていること特徴とする請求項1又は2に記載の加速度センサ。
【請求項4】
前記空隙が、前記梁部のねじれ中心軸を含んで設けられていることを特徴とする請求項1〜3のいずれかに記載の加速度センサ。
【請求項5】
前記梁部が、前記空隙部により複数本に分離されていることを特徴とする請求項1〜4のいずれかに記載の加速度センサ。
【請求項6】
前記ひずみ抵抗検出部がピエゾ抵抗素子からなることを特徴とする請求項1〜5のいずれかに記載の加速度センサ。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−237390(P2011−237390A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−111424(P2010−111424)
【出願日】平成22年5月13日(2010.5.13)
【出願人】(504145364)国立大学法人群馬大学 (352)
【出願人】(000151520)株式会社東京測器研究所 (29)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月13日(2010.5.13)
【出願人】(504145364)国立大学法人群馬大学 (352)
【出願人】(000151520)株式会社東京測器研究所 (29)
【Fターム(参考)】
[ Back to top ]