
加速度センサ
【課題】迅速かつ正確な道路の傾斜の検出に利用することができる「加速度センサ」を提供すること。
【解決手段】車両に搭載された状態で加速度を検出する加速度検出手段30を備え、加速度検出手段30によって検出された加速度を、設定された出力レンジの下での出力値として出力する加速度センサ1であって、互いに異なる複数の出力レンジを選択的に設定可能とされ、複数の出力レンジのうち、車両の現在位置、車両の走行状態および時間周期の少なくとも1つに応じた出力レンジを動的に設定すること。
【解決手段】車両に搭載された状態で加速度を検出する加速度検出手段30を備え、加速度検出手段30によって検出された加速度を、設定された出力レンジの下での出力値として出力する加速度センサ1であって、互いに異なる複数の出力レンジを選択的に設定可能とされ、複数の出力レンジのうち、車両の現在位置、車両の走行状態および時間周期の少なくとも1つに応じた出力レンジを動的に設定すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、加速度センサに係り、特に、車両に搭載するのに好適な加速度センサに関する。
【背景技術】
【0002】
従来から、車載用のナビゲーション装置においては、加速度センサを搭載することによって、搭載された加速度センサの検出結果に基づいて、例えば、道路の傾斜や車両の移動にともなう加速度を検出することが行われていた。
【0003】
より具体的には、検出軸が車両の進行方向を向いた加速度センサにおいては、次のA〜Cの各値のすべてが加算された値(A+B+C)の加速度が出力されるようになっていた。
A:加速度センサユニットの車両への取り付け傾斜による重力加速度
B:道路の傾斜による重力加速度
C:車両の移動にともなう加速度
【0004】
そして、この種の加速度センサによって道路の傾斜を検出する場合には、加速度センサの出力値(A+B+C)から、既知のAの値と、車速パルスから算出されたCの値とを減じることによって、道路の傾斜をBの算出値として検出することが可能であった。このようにして検出された道路の傾斜は、高速道路や高架道路の出入り判定等に活用されていた。
【0005】
また、加速度センサによって車両の移動にともなう加速度を検出する場合には、Bの値とCの値とを比較した場合にCの値が圧倒的に大きい点を利用して、加速度センサの出力値(A+B+C)から既知のAの値を減じた算出値として車両の移動にともなう加速度を検出することが可能であった。このような車両の移動にともなう加速度の検出は、車速パルスを取ることができないPND(Portable Navigation Device)に搭載される加速度センサにおいても可能であった。そして、このようにして検出された車両の移動にともなう加速度は、エコドライブ表示、運転警告または自車位置算出(加速度の積分値を距離に換算したものに基づいた算出)等に活用されていた。
【0006】
なお、この種の車両に搭載される加速度センサに関する従来技術としては、これまでにも、例えば、特許文献1に示すような技術が提案されていた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−266732号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、前述の手法(Bの値の算出)によって道路の傾斜を例えば0.2°ステップで高感度に検出するためには、以下の表1に示すように、2〜3mG程度の加速度差分を加速度センサによって検出できることが必要であった。
【0009】
【表1】

【0010】
そして、このような高感度(微小)な傾斜の検出を、分解能が10bitの加速度センサによって実現しようとする場合には、出力レンジが±0.5Gの10bit加速度センサによれば、1LSB(least significant bit)あたり1mGの検出感度となるため十分に実現可能であったが、出力レンジが±2Gの10bit加速度センサの場合には、1LSBあたり4mGの検出感度となるため実現不可能であった。
【0011】
したがって、道路の傾斜の検出には、低レンジ(換言すれば、狭レンジ)の加速度センサを用いることが有利であると言える。
【0012】
しかるに、出力レンジが±0.5Gの10bit加速度センサの場合であっても、車両が急加速または急減速した場合には、前述したCの値が大きくなり、これにAの値も手伝って、加速度センサの出力値(A+B+C)がレンジを振り切ってしまう場合があった。このような場合には、前述の手法(Bの値の算出)によって道路の傾斜を検出しようとしても、A+B+Cの値が不正確であるため、正確なBの値を算出することができず、却って傾斜の検出に支障を来たす結果となっていた。
【0013】
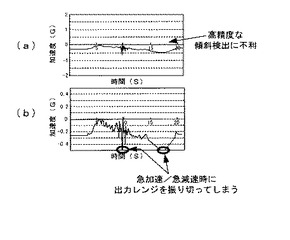
ここで、図10(a)、(b)は、それぞれ出力レンジが±2G、±0.5Gの10bit加速度センサの検出結果(縦軸の値)を示している。なお、両図において、出力レンジ以外の検出条件は同一であり、前述したAの値はともに−0.25G(15°)とされている。図10(a)、(b)によれば、低レンジの加速度センサの方が微小な傾斜の検出に有利であるが、急加速または急減速によるレンジの振り切れが発生してしまうことが分かる。
【0014】
この点、特許文献1によれば、加速度センサによって検出された加速度の大きさに応じて使用する出力レンジ(出力特性)を切り替えることができる。
【0015】
しかしながら、特許文献1においては、車両の現在位置や走行状態との関係から出力レンジを切り替えるべきことが明らかな場面においても、検出された加速度の値が閾値を超えるか否かを判定してはじめて当該加速度に応じた出力レンジに切り替えるため、道路の傾斜を迅速に検出することが困難であるといった問題が生じていた。
【0016】
そこで、本発明は、このような問題点に鑑みなされたものであり、迅速かつ正確な道路の傾斜の検出に利用することができる加速度センサを提供することを目的とするものである。
【課題を解決するための手段】
【0017】
前述した目的を達成するため、本発明に係る加速度センサは、車両に搭載された状態で加速度を検出する加速度検出手段を備え、前記加速度検出手段によって検出された前記加速度を、設定された出力レンジの下での出力値として出力する加速度センサであって、互いに異なる複数の前記出力レンジを選択的に設定可能とされ、前記複数の出力レンジのうち、前記車両の現在位置、前記車両の走行状態および時間周期の少なくとも1つに応じた前記出力レンジを動的に設定することを特徴としている。このような構成によれば、出力レンジを、車両の現在位置、車両の走行状態および時間周期の少なくとも1つに応じて動的に設定することができるので、道路の傾斜の検出に適した出力レンジを迅速に設定することができる。
【0018】
また、前記加速度検出手段によって検出される加速度と前記出力値との対応関係を示す前記複数の出力レンジごとの変換マップと、これら複数の出力レンジごとの変換マップのいずれか1つを選択し、選択された前記変換マップを用いて前記加速度検出手段によって検出された加速度の前記出力値への変換を行う変換手段とを備え、前記出力レンジの設定を、前記変換手段による前記変換マップの選択によって行うようにしてもよい。このような構成によれば、出力レンジが可変とされたデジタル出力方式の加速度センサに有効に適用することができる。
【0019】
さらに、前記複数の出力レンジのそれぞれを有する複数の前記加速度検出手段と、これら複数の加速度検出手段のいずれか1つを、前記出力値の出力に用いるべき加速度検出手段として選択する選択手段とを備え、前記出力レンジの設定を、前記選択手段による前記加速度検出手段の選択によって行うようにしてもよい。このような構成によれば、出力レンジが固定されたアナログ出力方式の加速度センサに有効に適用することができる。
【0020】
さらにまた、前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジのうちの低レンジ側の所定の出力レンジを設定することが望ましい。このような構成によれば、道路の傾斜を検出すべき区間において傾斜を高精度に検出することができる。
【0021】
また、前記車両の走行状態が前記車両の急加速または急減速を示す場合には、前記複数の出力レンジのうちの高レンジ側の所定の出力レンジを設定することが望ましい。このような構成によれば、急加速または急減速が行われる区間においても、加速度検出手段の検出結果が出力レンジを振り切ることを防止してある程度は正確な道路の傾斜を検出することができる。
【0022】
さらにまた、前記高レンジ側の所定の出力レンジをデフォルト設定してもよい。このような構成によれば、高レンジ側の所定の出力レンジをデフォルト設定しておき、車両が道路の傾斜を検出すべき区間を走行するようになった場合には、低レンジ側の所定の出力レンジに切り替えることができ、また、当該区間を走行中の場合においても、急加速や急減速が行われた場合には、出力レンジをデフォルト値に戻すことができる。
【0023】
また、前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジを所定の微小時間周期にしたがって交互に設定してもよい。このような構成によれば、道路の傾斜を検出すべき区間において傾斜をある程度高精度に検出することができるとともに、当該区間における急加速や急減速に柔軟に対応した傾斜検出を行うことができる。
【発明の効果】
【0024】
本発明によれば、迅速かつ正確な道路の傾斜の検出に供することができる。
【図面の簡単な説明】
【0025】
【図1】本発明に係る加速度センサの第1実施形態において、ナビゲーション装置を示すブロック図
【図2】本発明に係る加速度センサの第1実施形態を示すブロック図
【図3】本発明に係る加速度センサの第1実施形態において、低レンジ用信号変換マップの出力特性を示すグラフ
【図4】本発明に係る加速度センサの第1実施形態において、高レンジ用信号変換マップの出力特性を示すグラフ
【図5】本発明に係る加速度センサの第1実施形態において、加速度レンジ切り替えテーブルを示す概念図
【図6】本発明に係る加速度センサの第1実施形態を示すフローチャート
【図7】本発明に係る加速度センサの第2実施形態を示すブロック図
【図8】本発明に係る加速度センサの第2実施形態において、低加速度検出部の出力特性を示すグラフ
【図9】本発明に係る加速度センサの第2実施形態において、高加速度検出部の出力特性を示すグラフ
【図10】加速度センサの出力特性を、高レンジ(a)および低レンジ(b)の双方において示すグラフ
【発明を実施するための形態】
【0026】
(第1実施形態)
以下、本発明に係る加速度センサの第1実施形態について、図1乃至図6を参照して説明する。
【0027】
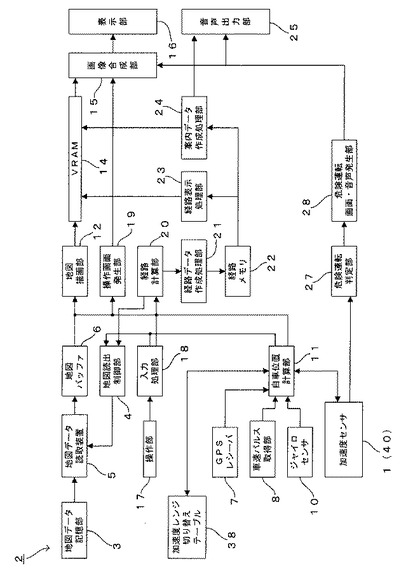
図1に示すように、本実施形態における加速度センサ1は、車載用のナビゲーション装置2に搭載されている。
【0028】
図1に示すように、ナビゲーション装置2は、例えばハードディスクドライブやDVDドライブからなる地図データ記憶部3を有しており、この地図データ記憶部3には、地図データが記憶されている。この地図データは、道路データフレーム、背景データフレーム、名称データフレーム、経路誘導データフレーム、経路計算データフレームおよび地点情報フレーム等の各種の物理データフレームによって構成されている。
【0029】
ここで、道路データフレームは、道路地図の表示等に用いられるようになっており、この道路データフレームには、リンク端またはリンク上の形状変化点を示すノードの二次元座標、他のリンクとの接続関係を示すノード・リンク接続情報、ノード付加情報(リンクID、幅員・車線情報、道路名称等)、標高情報および通行規制情報等が格納されている。
【0030】
また、背景データフレームは、背景地図の表示等に用いられるようになっており、この背景データフレームには、図形(線または面)の形状を表現するための表示クラス(建物、公園、河川等)ごとにまとめられた要素点座標情報(始点座標、オフセット座標)が格納されている。
【0031】
さらに、名称データフレームは、地図上への文字列の表示等に用いられるようになっており、この名称データフレームには、表示クラスごとにまとめられた名称データレコードが格納されている。
【0032】
さらにまた、経路誘導データフレームは、経路誘導に用いられるようになっており、この経路誘導データフレームには、交差点名称、道路名称および方面名称等からなる誘導データ、誘導データと関連した実体の表示文字、発音文字、アクセント情報、誘導データと関連した実体を描画するための形状、案内のために交差点の進入方向に応じた画像を描画するための実データ等が格納されている。
【0033】
また、経路計算データフレームは、目的地までの最適経路の計算に用いられるようになっており、この経路計算データフレームには、道路種別ごとにまとめられたランクの単位でノードデータ、リンクレコード、規制レコード、リンク間コストレコード、リンクID、リンク自身のコスト、上位のノードおよびリンクを特定する情報、ノード座標等が格納されている。
【0034】
さらに、地点情報フレームは、目的地や経由地の候補となる地点の検索や、地図上へのPOI(Points Of Interests)のアイコン(換言すれば、ランドマーク)の表示等に用いられるようになっており、この地点情報フレームには、地点の名称、住所、郵便番号、電話番号、種別およびPOIのアイコン等が格納されている。
【0035】
また、図1に示すように、ナビゲーション装置2は、地図読出制御部4、地図データ読取装置5および地図バッファ6を有している。ここで、地図データ読取装置5は、地図読出制御部4による読み出し指令に応じた地図データを地図データ記憶部3から読み出し、読み出された地図データを地図バッファ6に一時的に保存するようになっている。
【0036】
さらに、図1に示すように、ナビゲーション装置2は、GPSレシーバ7、車速パルス取得部8、ジャイロセンサ10および自車位置計算部11を有している。ここで、GPSレシーバ7は、GPS衛星から逐次配信される軌道および時刻に関するGPS情報を受信し、受信されたGPS情報を自車位置計算部11に入力するようになっている。また、車速パルス取得部8は、車両から車速パルスを取得し、取得された車速パルスを自車位置計算部11に入力するようになっている。さらに、ジャイロセンサ10は、自車の角速度や自車方位を検出し、検出結果を自車位置計算部11に入力するようになっている。そして、自車位置計算部11は、GPSレシーバ7から入力されたGPS情報を用いて車両の現在位置としての自車位置を絶対座標として算出する衛星航法を行うようになっている。また、自車位置計算部11は、車速パルス8およびジャイロセンサ10からの入力情報を用いて、自車位置を前回の測位位置からの相対的な変化分として算出する自律航法を行うようになっている。また、自車位置計算部11は、地図読出制御部4に、電波航法または自律航法によって算出された自車位置の周辺の地図データの読出指令を出力させ、この読出指令によって読み出された地図データを地図バッファ6から取得するようになっている。さらに、自車位置計算部11は、このようにして取得された地図データに基づいて、電波航法または自律航法によって算出された自車位置を、地図データにおける該当する道路上の位置に整合させるマップマッチング処理を行うようになっている。そして、自車位置計算部11は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0037】
さらにまた、図1に示すように、ナビゲーション装置2は、地図描画部12、VRAM14、画像合成部15および表示部16を有している。ここで、地図描画部12は、地図バッファ6に保存された自車位置の周辺の地図データに基づいて、自車位置の周辺の地図を表示するための地図描画データを生成するようになっている。そして、地図描画部12は、生成された地図描画データをVRAM14に一時的に格納するようになっている。そして、VRAM14に格納された地図描画データは、画像合成部15において必要に応じて他の画像データと合成された上で、表示部16において地図として表示されるようになっている。
【0038】
また、図1に示すように、ナビゲーション装置2は、操作部17、入力処理部18、操作画面発生部19、経路計算部20、経路データ作成処理部21、経路メモリ22および経路表示処理部23を有している。ここで、操作部17は、目的地の設定操作、経路計算条件の設定操作および誘導経路の決定操作等の種々の操作を行うことが可能とされている。この操作部17は、リモコン、タッチパネルまたは音声入力用のマイクロホン等であってもよい。このような操作部17の操作は、操作画面発生部19によって表示部16に表示される各種の操作画面を用いて行うことが可能とされている。また、入力処理部18は、操作部17の操作にしたがった入力処理を行うようになっている。さらに、経路計算部20は、操作部17および入力処理部18によって目的地の設定が行われた場合には、自車位置計算部11によって算出された自車位置から目的地までの経路計算条件にしたがった最適経路を計算するようになっている。この最適経路の計算には、地図読出制御部4を介して地図データ記憶部3から読み出された地図データが用いられるようになっている。さらにまた、経路データ作成処理部21は、経路計算部20によって算出された最適経路を示す経路データを作成し、作成された経路データを経路メモリ22に格納するようになっている。また、経路表示処理部23は、経路メモリ22に格納された経路データを、VRAM14および画像合成部15を介して表示部16に表示するようになっている。このとき、経路表示処理部23は、算出された最適経路を誘導経路の候補として表示するようになっている。
【0039】
さらに、図1に示すように、ナビゲーション装置2は、案内データ作成処理部24および音声出力部25を有している。ここで、案内データ作成処理部24は、経路表示処理部23によって提示された最適経路が操作部17の操作によって誘導経路として決定された場合には、決定された誘導経路にしたがった経路誘導を行うための案内データを作成するようになっている。この案内データの作成には、経路メモリ22に格納された経路データが用いられるようになっている。そして、案内データ作成処理部24は、作成された案内データを用いて経路誘導を行うようになっている。この経路誘導においては、具体的には、表示部16への交差点拡大図の表示や、音声出力部25を介した交差点右左折案内等が行われる。
【0040】
さらにまた、ナビゲーション装置2には、加速度センサ1の出力値を利用するための構成が備えられている。
【0041】
すなわち、本実施形態において、自車位置計算部11は、車両が高速道路または高架道路の入口もしくはその手前に該当する進入判定開始地点に到達した場合には、この後に自車位置を高速/高架道路上にマッチングさせるべきか、あるいは、その下を通る道路上にマッチングさせるべきかを判断するために、車両が高速/高架道路に進入したか否かの進入判定を開始するようになっている。そして、自車位置計算部11は、このような進入判定を行うために、加速度センサ1の出力値から、公知の計算方法によって道路の傾斜を算出するようになっている。このとき、前述のように、加速度センサ1の出力値から、既知の加速度センサ1の取り付け傾斜による重力加速度(Aの値)と車両の移動にともなう加速度(Cの値)とを減じることによって傾斜(Bの値)を算出してもよい。そして、自車位置計算部11は、このようにして算出された傾斜が、進入判定開始地点から進入判定終了地点までの所定の進入判定区間に亘って閾値以上となった場合には、進入判定の判定結果を車両が高速/高架道路に進入した旨の肯定的なものとし、これ以後の自車位置を高速/高架道路上にマッチングさせるようになっている。一方、自車位置計算部11は、算出された傾斜が進入判定区間において閾値未満となった場合には、進入判定の判定結果を車両が高速/高架道路に進入しなかった旨の否定的なものとし、これ以後の自車位置を高速/高架道路の下を通る道路上にマッチングさせるようになっている。
【0042】
また、自車位置計算部11は、自車位置が高速/高架道路上にマッチングされた後に、車両が高速/高架道路の出口もしくはその手前に該当する脱出判定開始地点に到達した場合には、この後に自車位置を引き続き高速/高架道路上にマッチングさせるべきか、あるいは、その下を通る道路上にマッチングさせるべきかを判断するために、車両が高速/高架道路から脱出したか否かの脱出判定を開始するようになっている。そして、自車位置計算部11は、脱出判定を行うために、加速度センサ1の出力値から進入判定のときと同様の手法によって道路の傾斜を算出するようになっている。そして、自車位置計算部11は、算出された傾斜が脱出判定開始地点から脱出判定終了地点までの所定の脱出判定区間に亘って閾値以上となった場合には、脱出判定の判定結果を車両が高速/高架道路から脱出した旨の肯定的なものとし、これ以後の自車位置を高速/高架道路の下を通る道路上にマッチングさせるようになっている。一方、自車位置計算部11は、算出された傾斜が脱出判定区間において閾値未満となった場合には、脱出判定の判定結果を車両が高速/高架道路を脱出しなかった旨の否定的なものとし、これ以後の自車位置を引き続き高速/高架道路上にマッチングさせるようになっている。
【0043】
なお、以上の進入/脱出判定の判定基準は、一般道から降りるようにして高速道路に進入する場所や、高速道路から昇るようにして一般道へと脱出するような場所においても適用することができる。ただし、その場合には、傾斜の正負は前述の判定基準の場合とは逆転することになる。
【0044】
さらに、図1に示すように、ナビゲーション装置2は、危険運転判定部27および危険運転画面・音声発生部28を有している。ここで、危険運転判定部27は、車両の危険な運転が行われたか否かの危険運転判定を行うようになっている。このような危険運転判定を行うために、危険運転判定部27は、まず、加速度センサ1の出力値から、既知の加速度センサ1の取り付け傾斜による重力加速度(Aの値)を減じることによって、危険運転判定用の加速度を算出するようになっている。そして、危険運転判定部27は、算出された危険運転判定用の加速度が閾値を超えた場合には、危険な運転が行われた旨の肯定的な判定結果を出力し、一方、当該加速度が閾値以下となった場合には、危険な運転が行われなかった旨の否定的な判定結果を出力するようになっている。なお、危険運転判定において肯定的な判定結果が得られる場合の危険運転用判定用の加速度は、車両の移動にともなう加速度(Cの値)が占める割合が極めて大きく、傾斜に相当する値(Bの値)は無視できるほど小さい。そして、危険運転画面・音声発生部28は、危険運転判定部27によって肯定的な判定結果が出力された場合には、危険運転を通知するための画面および音声を発生して、それぞれを表示部16および音声出力部25を介して出力するようになっている。
【0045】
次に、本実施形態における加速度センサ1の具体的な構成について説明する。
【0046】
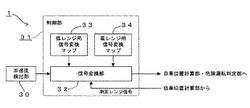
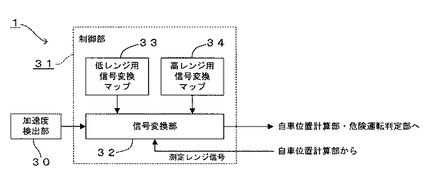
図2に示すように、本実施形態における加速度センサ1は、大別して、加速度検出手段としての単一の加速度検出部30と制御部31とによって構成されている。また、本実施形態における加速度センサ1は、デジタル出力方式(デジタルインターフェース)の加速度センサとされている。なお、加速センサ1は、検出軸が車両の進行方向に沿った進行方向前方を正としたものであってもよい。
【0047】
ここで、加速度検出部30は、前述した加速度センサ1の取り付け傾斜による重力加速度(Aの値)、道路の傾斜による重力加速度(Bの値)および車両の移動にともなう加速度(Cの値)が加算された加速度を検出するようになっている。そして、加速度検出部30は、検出結果を所定の出力特性(加速度−出力電圧特性)にしたがった出力電圧(デジタル値)として制御部31に出力するようになっている。
【0048】
また、制御部31は、加速度検出部30の検出結果を、設定された出力レンジの下での出力値として、自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0049】
さらに、制御部31は、互いに異なる複数の出力レンジを選択的に設定可能とされているとともに、複数の出力レンジのうち、車両の現在位置および車両の走行状態に応じた出力レンジを動的に(当該現在位置および走行状態の変化に応じて可変に)設定するようになっている。
【0050】
より具体的には、図2に示すように、制御部31は、変換手段としての信号変換部32と、複数の出力レンジごとの変換マップとしての低レンジ用信号変換マップ33および高レンジ用信号変換マップ34とを有している。これらの変換マップ33,34は、メモリに記憶させておけばよい。
【0051】
信号変換部32は、2つの変換マップ33,34のいずれか1つを選択するようになっており、これによって、選択された変換マップ33,34に該当する出力レンジが設定されるようになっている。
【0052】
そして、信号変換部32は、選択された1つの変換マップ33,34を用いて加速度検出部30の検出結果を出力値に変換する信号変換処理を行い、この信号変換処理によって取得された出力値を、前述のように自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0053】
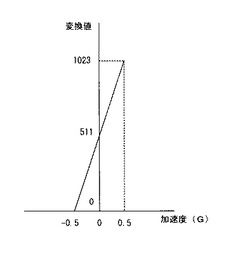
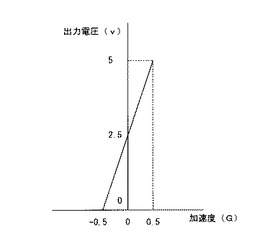
ここで、低レンジ用信号変換マップ33は、図3に示すように、±0.5Gの比較的低い(狭い)出力レンジに亘る加速度(横軸)と、この加速度に対応する変換値(縦軸)との対応関係(比例関係)を示す情報とされている。なお、図3は、変換値が0〜1023の各整数値からなる10bit加速度センサに対応した特性を示している。このような低レンジ用信号変換マップ33を用いて信号変換処理を行った場合には、−0.5G〜+0.5Gの出力レンジ内の加速度が、0〜1023のいずれかの数値(変換値)に変換されて出力値として出力されることになる。すなわち、低レンジ用信号変換マップ33を用いる場合には、加速度検出部30の検出結果が、±0.5Gの出力レンジの下での出力値として出力されることになる。
【0054】
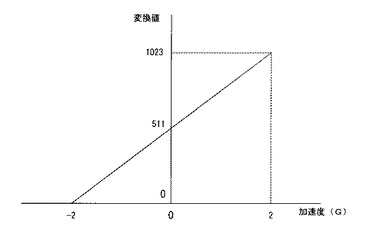
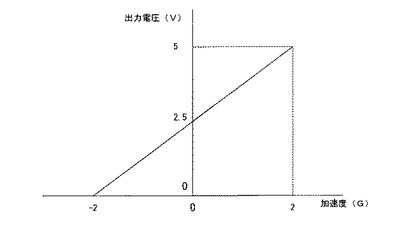
一方、高レンジ用信号変換マップ34は、図4に示すように、±2Gの比較的高い(広い)出力レンジに亘る加速度(横軸)と、この加速度に対応する変換値(縦軸)との対応関係(比例関係)を示す情報とされている。図4も、図3と同様に、変換値が0〜1023の各整数値からなる10bit加速度センサに対応した特性を示している。このような高レンジ用信号変換マップ34を用いて信号変換処理を行った場合には、−2G〜+2Gの出力レンジ内の加速度が、0〜1023のいずれかの数値(変換値)に変換されて出力値として出力されることになる。すなわち、高レンジ用信号変換マップ34を用いる場合には、加速度検出部30の検出結果が、±2Gの出力レンジの下での出力値として出力されることになる。
【0055】
本実施形態において、信号変換部32は、高レンジ用号変換マップ34をデフォルト選択することによって、高レンジ側の所定の出力レンジとしての±2Gをデフォルト設定するようになっている。このような±2Gの出力レンジにおいては、車両の急加速や急減速によって加速度検出部30の検出結果が大きくなった場合であっても、高い出力レンジ(±2G)によって加速度検出部30の検出結果を十分にカバーすることができ、出力値が出力レンジを振り切ることを防止することができる。
【0056】
さらに、信号変換部32は、デフォルト値(±2G)から低レンジ値(±0.5G)への出力レンジの切り替えを開始すべきレンジ切り替え開始地点に車両が到達したこと、また、当該切り替えを終了すべきレンジ切り替え終了地点に車両が到達したことを、それぞれ自車位置計算部11から入力される測定レンジ信号によって検知するようになっている。測定レンジ信号は、レンジ切り替え開始地点への車両の到達時およびレンジ切り替え終了地点への車両の到達時に自車位置計算部11が信号変換部32に入力するように構成すればよい。このとき、レンジ切り替え開始地点であるか、または、レンジ切り替え終了地点であるかに応じて、測定レンジ信号の内容を異ならせてよいことは勿論である。
【0057】
ここで、切り替え開始地点は、前述した進入判定開始地点および脱出判定開始地点に相当し、切り替え終了地点は、前述した進入判定終了地点および脱出判定終了地点に相当する。
【0058】
そして、信号変換部32は、測定レンジ信号によってレンジ切り替え開始地点への車両の到達を検知した場合には、低レンジ用信号変換マップ33を選択することによって、出力レンジの低レンジ値(±0.5G)への切り替えを開始するようになっている。
【0059】
また、信号変換部32は、このような切り替えを開始した後に、測定レンジ信号によってレンジ切り替え終了地点への車両の到達を検知した場合には、高レンジ用信号変換マップ34を選択することによって出力レンジを高レンジ値(±2G)へと戻すようになっている。
【0060】
図1に戻って、ナビゲーション装置2は、レンジ切り替え開始地点およびレンジ切り替え終了地点のそれぞれの二次元座標が格納された加速度レンジ切り替えテーブル38を有している。この加速度レンジ切り替えテーブル38は、自車位置計算部11が保有するものであってもよいし、地図データ記憶部3に記憶されたものであってもよい。
【0061】
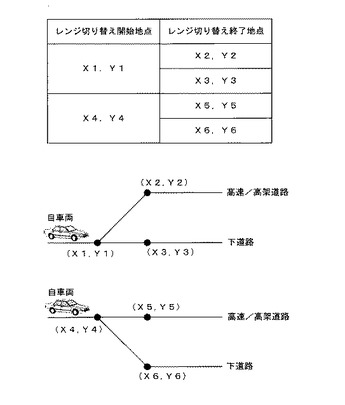
より具体的には、図5に示すように、加速度レンジ切り替えテーブル38には、進入判定用の地点座標として、レンジ切り替え開始地点の座標(X1,Y1)、高速/高架道路側のレンジ切り替え終了地点の座標(X2,Y2)および下道路側のレンジ切り替え終了地点の座標(X3,Y3)が格納されている。また、加速度レンジ切り替えテーブル38には、脱出判定用の地点座標として、レンジ切り替え開始地点の座標(X4,Y4)、高速/高架道路側のレンジ切り替え終了地点の座標(X5,Y5)および下道路側のレンジ切り替え終了地点の座標(X6,Y6)が格納されている。ただし、レンジ切り替え終了地点は、図5に示すように、高速/高架道路に上りきった(あるいは下りきった)地点である必要はなく、レンジ切り替え開始地点から所定距離の地点(上り/下りきる前の地点)であってもよい。
【0062】
そして、自車位置計算部11は、このような加速度レンジ切り替えテーブル38を参照し、自車位置がテーブル34内の座標に一致した場合には、該当する地点に到達した旨の測定レンジ信号を信号変換部32に入力するようになっている。
【0063】
なお、前述した進入判定および脱出判定の開始/終了は、自車位置が加速度レンジ切り替えテーブル38内の各座標にマッチングしたことを契機として行うようにしてもよい。
【0064】
以上の構成によれば、道路の傾斜を検出すべき区間としての進入判定区間および脱出判定区間においては、出力レンジを低レンジ値(±0.5G)に切り替えることによって微小な差分(例えば、2〜3mG)の加速度を検出することができるので、傾斜を高精度に検出することができる。また、切り替え開始地点においては、加速度検出部30の検出結果の値を判定するまでもなく即時に出力レンジを切り替えて対応する出力値を出力することができるので、傾斜の検出をすみやかに開始することができる。
【0065】
なお、信号変換部32に、車両のバスを介してアクセルセンサからのアクセル信号およびブレーキセンサからのブレーキ信号が入力されるように構成した上で、信号変換部32が、進入判定区間および脱出判定区間において、急加速を示す踏み込み量のアクセル信号または急減速を示す踏み込み量のブレーキ信号が入力された場合には、出力レンジをデフォルト値(±2G)に戻すように構成してもよい。ただし、デフォルト値に戻す期間は、急加速または加減速が行われている期間のみでよい。このように構成すれば、進入判定区間および脱出判定区間における急な加減速が行われた場合であっても、そのときの出力値がレンジを振り切ることを防止することができるので、急な加減速が行われた区間の傾斜をある程度正確に検出することができる。
【0066】
次に、本実施形態の作用の一例について図6を参照して説明する。
【0067】
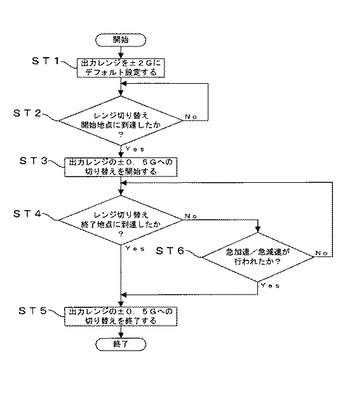
本実施形態においては、まず、図6のステップ1(ST1)において、信号変換部32による高レンジ用信号変換マップ34の選択によって、出力レンジを高レンジ値(±2G)にデフォルト設定し、加速度検出部30の検出結果を、高レンジの出力値に変換して出力するようにする。
【0068】
次いで、ステップ2(ST2)において、信号変換部32により、自車位置計算部11側からの所定の測定レンジ信号の入力の有無に基づいて、車両がレンジ切り替え開始地点に到達したか否かを判定する。そして、ステップ2(ST2)において肯定的な判定結果が得られた場合には、ステップ3(ST3)に進み、否定的な判定結果が得られた場合には、ステップ2(ST2)を繰り返す。
【0069】
次いで、ステップ3(ST3)において、信号変換部32による低レンジ用信号変換マップ33の選択によって、出力レンジの低レンジ値(±0.5G)への切り替えおよび当該低レンジ値の出力値を用いた傾斜の検出を開始する。このステップ3(ST3)における出力レンジの切り替えの開始は、前述した進入判定または脱出判定の開始と同期させればよい。
【0070】
次いで、ステップ4(ST4)において、信号変換部32により、自車位置計算部11側からの所定の測定レンジ信号の入力の有無に基づいて、車両がレンジ切り替え終了地点に到達したか否かを判定する。そして、ステップ4(ST4)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ6(ST6)に進む。
【0071】
ここで、ステップ5(ST5)においては、信号変換部32による高レンジ用信号変換マップ34の選択によって、ステップ3(ST3)において開始した出力レンジの切り替えを終了し、出力レンジをデフォルト値(±0.2G)に戻して処理を終了する。このステップ5(ST5)における出力レンジの切り替えの終了は、進入判定または脱出判定の終了および傾斜検出の終了と同期させればよい。
【0072】
一方、ステップ6(ST6)においては、信号変換部32により、車両側から入力されるアクセル信号またはブレーキ信号に基づいて、急加速または急減速が行われたか否かを判定する。そして、ステップ6(ST6)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ4(ST4)に戻る。ただし、ステップ6(ST6)からステップ5(ST5)に進んだ場合には、レンジ切り替え終了地点に到達していないことを条件として、急加速/急減速の終了を待って低レンジ値(±0.5G)に復帰させればよい。
【0073】
(第2実施形態)
次に、本発明に係る加速度センサの第2実施形態について、図7乃至図9を参照して説明する。
【0074】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0075】
図1に示すように、本実施形態における加速度センサ40は、ナビゲーション装置2に搭載された状態で、その出力値が進入/脱出判定や危険運転判定に用いられる点においては、第1実施形態の加速度センサ1と同様である。
【0076】
本実施形態の加速度センサ40の第1実施形態との特徴的な相違点は、本実施形態においては、アナログ出力方式の加速度センサが適用され、これにともなって、第1実施形態とは異なる出力レンジの設定を行うように構成されている点にある。
【0077】
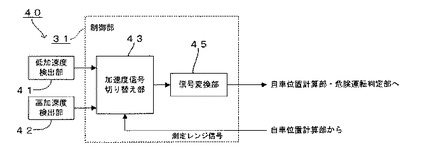
すなわち、図7に示すように、本実施形態における加速度センサ40は、複数の加速度検出手段として、低加速度検出部41と高加速度検出部42との2つの加速度検出部41,42を有している。
【0078】
ここで、低加速度検出部41は、図8に示すような±0.5Gの出力レンジを有しており、この出力レンジ内の検出加速度を、図8の出力特性(比例特性)にしたがった5ボルト以内の出力電圧(アナログ値)として制御部31に出力するようになっている。
【0079】
一方、高加速度検出部42は、図9に示すような±2Gの出力レンジを有しており、この出力レンジ内の検出加速度を、図9の出力特性(比例特性)にしたがった5ボルト以内の出力電圧(アナログ値)として制御部31に出力するようになっている。
【0080】
図7に戻って、制御部31は、選択手段としての加速度信号切り替え部43と、信号変換部45とを有している。
【0081】
ここで、加速度信号切り替え部43は、低加速度検出部41および高加速度検出部42のうちのいずれか一方を、出力値の出力に用いるべき加速度検出部として選択し、選択された一方の加速度検出部41,42から出力された出力電圧のみを、信号変換部45にそのまま出力するようになっている。
【0082】
そして、信号変換部45は、加速度信号切り替え部43から出力された出力電圧を、所定の変換特性にしたがって所定ビット数(例えば、10bit)の数値(変換値)に変換し、変換された数値を自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0083】
したがって、本実施形態においては、出力レンジの設定を、加速度信号切り替え部43による加速度検出部41,42の選択によって行うようになっている。
【0084】
すなわち、本実施形態においては、高加速度検出部42をデフォルト選択することよって、第1実施形態と同様に高レンジ側の出力レンジ(±2G)をデフォルト設定するようになっている。また、前述した進入/脱出判定区間においては、低加速度検出部41を選択することよって、第1実施形態と同様に低レンジ側の出力レンジ(±0.5G)への切り替えを行うようになっている。なお、その際のレンジ切り替え開始/終了地点の検出については、第1実施形態と同様の測定レンジ信号を加速度信号切り替え部43に入力することによって行うことが可能とされている。
【0085】
また、加速度信号切り替え部43は、進入/脱出判定区間における急な加減速が行われたことをアクセル信号またはブレーキ信号に基づいて検知した場合には、高加速度検出部42を選択することによって第1実施形態と同様に出力レンジをデフォルト設定に戻すようにしてもよい。
【0086】
本実施形態においても、第1実施形態と同様に、道路の傾斜の検出に適した出力レンジを迅速に設定することができる。
【0087】
なお、本発明は、前述した実施の形態に限定されるものではなく、本発明の特徴点を損なわない限度において種々変更することができる。
【0088】
例えば、進入/脱出判定区間において、所定の微小時間周期にしたがって、低レンジ側の出力レンジ(±0.5G)と高レンジ側の出力レンジ(±2G)とを交互に設定するように構成してもよい。ここで、微小時間周期を20msecとした場合には、例えば、はじめの20msecの期間は±0.5Gを設定し、その次の20msecの期間は±2Gを設定し、さらにその次の20msecの期間は±0.5Gを設定するといった処理を連続的に繰り返すことになる。このような構成は、第1実施形態に示した変換マップ33,34の選択および第2実施形態に示した加速度検出部41,42の選択の双方において実現することができる。このように構成すれば、高精度な傾斜の検出および急加減速時における傾斜の検出の双方に適した出力レンジを短時間のうちに交互に設定することができるので、進入/脱出判定区間において傾斜をある程度高精度に検出することができるとともに、当該区間における急加速や急減速に柔軟に対応した傾斜検出を行うことができる。
【0089】
また、信号変換部32,45からの出力値に対応する出力レンジについては、自車位置計算部11および危険運転判定部27が切り替え開始/終了地点と対応付けて予め把握しておけばよい。
【0090】
さらに、前述した実施形態においては、出力レンジとして、2つのレンジが設定されることを説明したが、必要に応じて3つ以上の出力レンジを設定可能としてもよい。
【符号の説明】
【0091】
1 加速度センサ
30 加速度検出部
32 信号変換部
33 低レンジ用信号変換マップ
34 高レンジ用信号変換マップ
【技術分野】
【0001】
本発明は、加速度センサに係り、特に、車両に搭載するのに好適な加速度センサに関する。
【背景技術】
【0002】
従来から、車載用のナビゲーション装置においては、加速度センサを搭載することによって、搭載された加速度センサの検出結果に基づいて、例えば、道路の傾斜や車両の移動にともなう加速度を検出することが行われていた。
【0003】
より具体的には、検出軸が車両の進行方向を向いた加速度センサにおいては、次のA〜Cの各値のすべてが加算された値(A+B+C)の加速度が出力されるようになっていた。
A:加速度センサユニットの車両への取り付け傾斜による重力加速度
B:道路の傾斜による重力加速度
C:車両の移動にともなう加速度
【0004】
そして、この種の加速度センサによって道路の傾斜を検出する場合には、加速度センサの出力値(A+B+C)から、既知のAの値と、車速パルスから算出されたCの値とを減じることによって、道路の傾斜をBの算出値として検出することが可能であった。このようにして検出された道路の傾斜は、高速道路や高架道路の出入り判定等に活用されていた。
【0005】
また、加速度センサによって車両の移動にともなう加速度を検出する場合には、Bの値とCの値とを比較した場合にCの値が圧倒的に大きい点を利用して、加速度センサの出力値(A+B+C)から既知のAの値を減じた算出値として車両の移動にともなう加速度を検出することが可能であった。このような車両の移動にともなう加速度の検出は、車速パルスを取ることができないPND(Portable Navigation Device)に搭載される加速度センサにおいても可能であった。そして、このようにして検出された車両の移動にともなう加速度は、エコドライブ表示、運転警告または自車位置算出(加速度の積分値を距離に換算したものに基づいた算出)等に活用されていた。
【0006】
なお、この種の車両に搭載される加速度センサに関する従来技術としては、これまでにも、例えば、特許文献1に示すような技術が提案されていた。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−266732号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、前述の手法(Bの値の算出)によって道路の傾斜を例えば0.2°ステップで高感度に検出するためには、以下の表1に示すように、2〜3mG程度の加速度差分を加速度センサによって検出できることが必要であった。
【0009】
【表1】
【0010】
そして、このような高感度(微小)な傾斜の検出を、分解能が10bitの加速度センサによって実現しようとする場合には、出力レンジが±0.5Gの10bit加速度センサによれば、1LSB(least significant bit)あたり1mGの検出感度となるため十分に実現可能であったが、出力レンジが±2Gの10bit加速度センサの場合には、1LSBあたり4mGの検出感度となるため実現不可能であった。
【0011】
したがって、道路の傾斜の検出には、低レンジ(換言すれば、狭レンジ)の加速度センサを用いることが有利であると言える。
【0012】
しかるに、出力レンジが±0.5Gの10bit加速度センサの場合であっても、車両が急加速または急減速した場合には、前述したCの値が大きくなり、これにAの値も手伝って、加速度センサの出力値(A+B+C)がレンジを振り切ってしまう場合があった。このような場合には、前述の手法(Bの値の算出)によって道路の傾斜を検出しようとしても、A+B+Cの値が不正確であるため、正確なBの値を算出することができず、却って傾斜の検出に支障を来たす結果となっていた。
【0013】
ここで、図10(a)、(b)は、それぞれ出力レンジが±2G、±0.5Gの10bit加速度センサの検出結果(縦軸の値)を示している。なお、両図において、出力レンジ以外の検出条件は同一であり、前述したAの値はともに−0.25G(15°)とされている。図10(a)、(b)によれば、低レンジの加速度センサの方が微小な傾斜の検出に有利であるが、急加速または急減速によるレンジの振り切れが発生してしまうことが分かる。
【0014】
この点、特許文献1によれば、加速度センサによって検出された加速度の大きさに応じて使用する出力レンジ(出力特性)を切り替えることができる。
【0015】
しかしながら、特許文献1においては、車両の現在位置や走行状態との関係から出力レンジを切り替えるべきことが明らかな場面においても、検出された加速度の値が閾値を超えるか否かを判定してはじめて当該加速度に応じた出力レンジに切り替えるため、道路の傾斜を迅速に検出することが困難であるといった問題が生じていた。
【0016】
そこで、本発明は、このような問題点に鑑みなされたものであり、迅速かつ正確な道路の傾斜の検出に利用することができる加速度センサを提供することを目的とするものである。
【課題を解決するための手段】
【0017】
前述した目的を達成するため、本発明に係る加速度センサは、車両に搭載された状態で加速度を検出する加速度検出手段を備え、前記加速度検出手段によって検出された前記加速度を、設定された出力レンジの下での出力値として出力する加速度センサであって、互いに異なる複数の前記出力レンジを選択的に設定可能とされ、前記複数の出力レンジのうち、前記車両の現在位置、前記車両の走行状態および時間周期の少なくとも1つに応じた前記出力レンジを動的に設定することを特徴としている。このような構成によれば、出力レンジを、車両の現在位置、車両の走行状態および時間周期の少なくとも1つに応じて動的に設定することができるので、道路の傾斜の検出に適した出力レンジを迅速に設定することができる。
【0018】
また、前記加速度検出手段によって検出される加速度と前記出力値との対応関係を示す前記複数の出力レンジごとの変換マップと、これら複数の出力レンジごとの変換マップのいずれか1つを選択し、選択された前記変換マップを用いて前記加速度検出手段によって検出された加速度の前記出力値への変換を行う変換手段とを備え、前記出力レンジの設定を、前記変換手段による前記変換マップの選択によって行うようにしてもよい。このような構成によれば、出力レンジが可変とされたデジタル出力方式の加速度センサに有効に適用することができる。
【0019】
さらに、前記複数の出力レンジのそれぞれを有する複数の前記加速度検出手段と、これら複数の加速度検出手段のいずれか1つを、前記出力値の出力に用いるべき加速度検出手段として選択する選択手段とを備え、前記出力レンジの設定を、前記選択手段による前記加速度検出手段の選択によって行うようにしてもよい。このような構成によれば、出力レンジが固定されたアナログ出力方式の加速度センサに有効に適用することができる。
【0020】
さらにまた、前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジのうちの低レンジ側の所定の出力レンジを設定することが望ましい。このような構成によれば、道路の傾斜を検出すべき区間において傾斜を高精度に検出することができる。
【0021】
また、前記車両の走行状態が前記車両の急加速または急減速を示す場合には、前記複数の出力レンジのうちの高レンジ側の所定の出力レンジを設定することが望ましい。このような構成によれば、急加速または急減速が行われる区間においても、加速度検出手段の検出結果が出力レンジを振り切ることを防止してある程度は正確な道路の傾斜を検出することができる。
【0022】
さらにまた、前記高レンジ側の所定の出力レンジをデフォルト設定してもよい。このような構成によれば、高レンジ側の所定の出力レンジをデフォルト設定しておき、車両が道路の傾斜を検出すべき区間を走行するようになった場合には、低レンジ側の所定の出力レンジに切り替えることができ、また、当該区間を走行中の場合においても、急加速や急減速が行われた場合には、出力レンジをデフォルト値に戻すことができる。
【0023】
また、前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジを所定の微小時間周期にしたがって交互に設定してもよい。このような構成によれば、道路の傾斜を検出すべき区間において傾斜をある程度高精度に検出することができるとともに、当該区間における急加速や急減速に柔軟に対応した傾斜検出を行うことができる。
【発明の効果】
【0024】
本発明によれば、迅速かつ正確な道路の傾斜の検出に供することができる。
【図面の簡単な説明】
【0025】
【図1】本発明に係る加速度センサの第1実施形態において、ナビゲーション装置を示すブロック図
【図2】本発明に係る加速度センサの第1実施形態を示すブロック図
【図3】本発明に係る加速度センサの第1実施形態において、低レンジ用信号変換マップの出力特性を示すグラフ
【図4】本発明に係る加速度センサの第1実施形態において、高レンジ用信号変換マップの出力特性を示すグラフ
【図5】本発明に係る加速度センサの第1実施形態において、加速度レンジ切り替えテーブルを示す概念図
【図6】本発明に係る加速度センサの第1実施形態を示すフローチャート
【図7】本発明に係る加速度センサの第2実施形態を示すブロック図
【図8】本発明に係る加速度センサの第2実施形態において、低加速度検出部の出力特性を示すグラフ
【図9】本発明に係る加速度センサの第2実施形態において、高加速度検出部の出力特性を示すグラフ
【図10】加速度センサの出力特性を、高レンジ(a)および低レンジ(b)の双方において示すグラフ
【発明を実施するための形態】
【0026】
(第1実施形態)
以下、本発明に係る加速度センサの第1実施形態について、図1乃至図6を参照して説明する。
【0027】
図1に示すように、本実施形態における加速度センサ1は、車載用のナビゲーション装置2に搭載されている。
【0028】
図1に示すように、ナビゲーション装置2は、例えばハードディスクドライブやDVDドライブからなる地図データ記憶部3を有しており、この地図データ記憶部3には、地図データが記憶されている。この地図データは、道路データフレーム、背景データフレーム、名称データフレーム、経路誘導データフレーム、経路計算データフレームおよび地点情報フレーム等の各種の物理データフレームによって構成されている。
【0029】
ここで、道路データフレームは、道路地図の表示等に用いられるようになっており、この道路データフレームには、リンク端またはリンク上の形状変化点を示すノードの二次元座標、他のリンクとの接続関係を示すノード・リンク接続情報、ノード付加情報(リンクID、幅員・車線情報、道路名称等)、標高情報および通行規制情報等が格納されている。
【0030】
また、背景データフレームは、背景地図の表示等に用いられるようになっており、この背景データフレームには、図形(線または面)の形状を表現するための表示クラス(建物、公園、河川等)ごとにまとめられた要素点座標情報(始点座標、オフセット座標)が格納されている。
【0031】
さらに、名称データフレームは、地図上への文字列の表示等に用いられるようになっており、この名称データフレームには、表示クラスごとにまとめられた名称データレコードが格納されている。
【0032】
さらにまた、経路誘導データフレームは、経路誘導に用いられるようになっており、この経路誘導データフレームには、交差点名称、道路名称および方面名称等からなる誘導データ、誘導データと関連した実体の表示文字、発音文字、アクセント情報、誘導データと関連した実体を描画するための形状、案内のために交差点の進入方向に応じた画像を描画するための実データ等が格納されている。
【0033】
また、経路計算データフレームは、目的地までの最適経路の計算に用いられるようになっており、この経路計算データフレームには、道路種別ごとにまとめられたランクの単位でノードデータ、リンクレコード、規制レコード、リンク間コストレコード、リンクID、リンク自身のコスト、上位のノードおよびリンクを特定する情報、ノード座標等が格納されている。
【0034】
さらに、地点情報フレームは、目的地や経由地の候補となる地点の検索や、地図上へのPOI(Points Of Interests)のアイコン(換言すれば、ランドマーク)の表示等に用いられるようになっており、この地点情報フレームには、地点の名称、住所、郵便番号、電話番号、種別およびPOIのアイコン等が格納されている。
【0035】
また、図1に示すように、ナビゲーション装置2は、地図読出制御部4、地図データ読取装置5および地図バッファ6を有している。ここで、地図データ読取装置5は、地図読出制御部4による読み出し指令に応じた地図データを地図データ記憶部3から読み出し、読み出された地図データを地図バッファ6に一時的に保存するようになっている。
【0036】
さらに、図1に示すように、ナビゲーション装置2は、GPSレシーバ7、車速パルス取得部8、ジャイロセンサ10および自車位置計算部11を有している。ここで、GPSレシーバ7は、GPS衛星から逐次配信される軌道および時刻に関するGPS情報を受信し、受信されたGPS情報を自車位置計算部11に入力するようになっている。また、車速パルス取得部8は、車両から車速パルスを取得し、取得された車速パルスを自車位置計算部11に入力するようになっている。さらに、ジャイロセンサ10は、自車の角速度や自車方位を検出し、検出結果を自車位置計算部11に入力するようになっている。そして、自車位置計算部11は、GPSレシーバ7から入力されたGPS情報を用いて車両の現在位置としての自車位置を絶対座標として算出する衛星航法を行うようになっている。また、自車位置計算部11は、車速パルス8およびジャイロセンサ10からの入力情報を用いて、自車位置を前回の測位位置からの相対的な変化分として算出する自律航法を行うようになっている。また、自車位置計算部11は、地図読出制御部4に、電波航法または自律航法によって算出された自車位置の周辺の地図データの読出指令を出力させ、この読出指令によって読み出された地図データを地図バッファ6から取得するようになっている。さらに、自車位置計算部11は、このようにして取得された地図データに基づいて、電波航法または自律航法によって算出された自車位置を、地図データにおける該当する道路上の位置に整合させるマップマッチング処理を行うようになっている。そして、自車位置計算部11は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0037】
さらにまた、図1に示すように、ナビゲーション装置2は、地図描画部12、VRAM14、画像合成部15および表示部16を有している。ここで、地図描画部12は、地図バッファ6に保存された自車位置の周辺の地図データに基づいて、自車位置の周辺の地図を表示するための地図描画データを生成するようになっている。そして、地図描画部12は、生成された地図描画データをVRAM14に一時的に格納するようになっている。そして、VRAM14に格納された地図描画データは、画像合成部15において必要に応じて他の画像データと合成された上で、表示部16において地図として表示されるようになっている。
【0038】
また、図1に示すように、ナビゲーション装置2は、操作部17、入力処理部18、操作画面発生部19、経路計算部20、経路データ作成処理部21、経路メモリ22および経路表示処理部23を有している。ここで、操作部17は、目的地の設定操作、経路計算条件の設定操作および誘導経路の決定操作等の種々の操作を行うことが可能とされている。この操作部17は、リモコン、タッチパネルまたは音声入力用のマイクロホン等であってもよい。このような操作部17の操作は、操作画面発生部19によって表示部16に表示される各種の操作画面を用いて行うことが可能とされている。また、入力処理部18は、操作部17の操作にしたがった入力処理を行うようになっている。さらに、経路計算部20は、操作部17および入力処理部18によって目的地の設定が行われた場合には、自車位置計算部11によって算出された自車位置から目的地までの経路計算条件にしたがった最適経路を計算するようになっている。この最適経路の計算には、地図読出制御部4を介して地図データ記憶部3から読み出された地図データが用いられるようになっている。さらにまた、経路データ作成処理部21は、経路計算部20によって算出された最適経路を示す経路データを作成し、作成された経路データを経路メモリ22に格納するようになっている。また、経路表示処理部23は、経路メモリ22に格納された経路データを、VRAM14および画像合成部15を介して表示部16に表示するようになっている。このとき、経路表示処理部23は、算出された最適経路を誘導経路の候補として表示するようになっている。
【0039】
さらに、図1に示すように、ナビゲーション装置2は、案内データ作成処理部24および音声出力部25を有している。ここで、案内データ作成処理部24は、経路表示処理部23によって提示された最適経路が操作部17の操作によって誘導経路として決定された場合には、決定された誘導経路にしたがった経路誘導を行うための案内データを作成するようになっている。この案内データの作成には、経路メモリ22に格納された経路データが用いられるようになっている。そして、案内データ作成処理部24は、作成された案内データを用いて経路誘導を行うようになっている。この経路誘導においては、具体的には、表示部16への交差点拡大図の表示や、音声出力部25を介した交差点右左折案内等が行われる。
【0040】
さらにまた、ナビゲーション装置2には、加速度センサ1の出力値を利用するための構成が備えられている。
【0041】
すなわち、本実施形態において、自車位置計算部11は、車両が高速道路または高架道路の入口もしくはその手前に該当する進入判定開始地点に到達した場合には、この後に自車位置を高速/高架道路上にマッチングさせるべきか、あるいは、その下を通る道路上にマッチングさせるべきかを判断するために、車両が高速/高架道路に進入したか否かの進入判定を開始するようになっている。そして、自車位置計算部11は、このような進入判定を行うために、加速度センサ1の出力値から、公知の計算方法によって道路の傾斜を算出するようになっている。このとき、前述のように、加速度センサ1の出力値から、既知の加速度センサ1の取り付け傾斜による重力加速度(Aの値)と車両の移動にともなう加速度(Cの値)とを減じることによって傾斜(Bの値)を算出してもよい。そして、自車位置計算部11は、このようにして算出された傾斜が、進入判定開始地点から進入判定終了地点までの所定の進入判定区間に亘って閾値以上となった場合には、進入判定の判定結果を車両が高速/高架道路に進入した旨の肯定的なものとし、これ以後の自車位置を高速/高架道路上にマッチングさせるようになっている。一方、自車位置計算部11は、算出された傾斜が進入判定区間において閾値未満となった場合には、進入判定の判定結果を車両が高速/高架道路に進入しなかった旨の否定的なものとし、これ以後の自車位置を高速/高架道路の下を通る道路上にマッチングさせるようになっている。
【0042】
また、自車位置計算部11は、自車位置が高速/高架道路上にマッチングされた後に、車両が高速/高架道路の出口もしくはその手前に該当する脱出判定開始地点に到達した場合には、この後に自車位置を引き続き高速/高架道路上にマッチングさせるべきか、あるいは、その下を通る道路上にマッチングさせるべきかを判断するために、車両が高速/高架道路から脱出したか否かの脱出判定を開始するようになっている。そして、自車位置計算部11は、脱出判定を行うために、加速度センサ1の出力値から進入判定のときと同様の手法によって道路の傾斜を算出するようになっている。そして、自車位置計算部11は、算出された傾斜が脱出判定開始地点から脱出判定終了地点までの所定の脱出判定区間に亘って閾値以上となった場合には、脱出判定の判定結果を車両が高速/高架道路から脱出した旨の肯定的なものとし、これ以後の自車位置を高速/高架道路の下を通る道路上にマッチングさせるようになっている。一方、自車位置計算部11は、算出された傾斜が脱出判定区間において閾値未満となった場合には、脱出判定の判定結果を車両が高速/高架道路を脱出しなかった旨の否定的なものとし、これ以後の自車位置を引き続き高速/高架道路上にマッチングさせるようになっている。
【0043】
なお、以上の進入/脱出判定の判定基準は、一般道から降りるようにして高速道路に進入する場所や、高速道路から昇るようにして一般道へと脱出するような場所においても適用することができる。ただし、その場合には、傾斜の正負は前述の判定基準の場合とは逆転することになる。
【0044】
さらに、図1に示すように、ナビゲーション装置2は、危険運転判定部27および危険運転画面・音声発生部28を有している。ここで、危険運転判定部27は、車両の危険な運転が行われたか否かの危険運転判定を行うようになっている。このような危険運転判定を行うために、危険運転判定部27は、まず、加速度センサ1の出力値から、既知の加速度センサ1の取り付け傾斜による重力加速度(Aの値)を減じることによって、危険運転判定用の加速度を算出するようになっている。そして、危険運転判定部27は、算出された危険運転判定用の加速度が閾値を超えた場合には、危険な運転が行われた旨の肯定的な判定結果を出力し、一方、当該加速度が閾値以下となった場合には、危険な運転が行われなかった旨の否定的な判定結果を出力するようになっている。なお、危険運転判定において肯定的な判定結果が得られる場合の危険運転用判定用の加速度は、車両の移動にともなう加速度(Cの値)が占める割合が極めて大きく、傾斜に相当する値(Bの値)は無視できるほど小さい。そして、危険運転画面・音声発生部28は、危険運転判定部27によって肯定的な判定結果が出力された場合には、危険運転を通知するための画面および音声を発生して、それぞれを表示部16および音声出力部25を介して出力するようになっている。
【0045】
次に、本実施形態における加速度センサ1の具体的な構成について説明する。
【0046】
図2に示すように、本実施形態における加速度センサ1は、大別して、加速度検出手段としての単一の加速度検出部30と制御部31とによって構成されている。また、本実施形態における加速度センサ1は、デジタル出力方式(デジタルインターフェース)の加速度センサとされている。なお、加速センサ1は、検出軸が車両の進行方向に沿った進行方向前方を正としたものであってもよい。
【0047】
ここで、加速度検出部30は、前述した加速度センサ1の取り付け傾斜による重力加速度(Aの値)、道路の傾斜による重力加速度(Bの値)および車両の移動にともなう加速度(Cの値)が加算された加速度を検出するようになっている。そして、加速度検出部30は、検出結果を所定の出力特性(加速度−出力電圧特性)にしたがった出力電圧(デジタル値)として制御部31に出力するようになっている。
【0048】
また、制御部31は、加速度検出部30の検出結果を、設定された出力レンジの下での出力値として、自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0049】
さらに、制御部31は、互いに異なる複数の出力レンジを選択的に設定可能とされているとともに、複数の出力レンジのうち、車両の現在位置および車両の走行状態に応じた出力レンジを動的に(当該現在位置および走行状態の変化に応じて可変に)設定するようになっている。
【0050】
より具体的には、図2に示すように、制御部31は、変換手段としての信号変換部32と、複数の出力レンジごとの変換マップとしての低レンジ用信号変換マップ33および高レンジ用信号変換マップ34とを有している。これらの変換マップ33,34は、メモリに記憶させておけばよい。
【0051】
信号変換部32は、2つの変換マップ33,34のいずれか1つを選択するようになっており、これによって、選択された変換マップ33,34に該当する出力レンジが設定されるようになっている。
【0052】
そして、信号変換部32は、選択された1つの変換マップ33,34を用いて加速度検出部30の検出結果を出力値に変換する信号変換処理を行い、この信号変換処理によって取得された出力値を、前述のように自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0053】
ここで、低レンジ用信号変換マップ33は、図3に示すように、±0.5Gの比較的低い(狭い)出力レンジに亘る加速度(横軸)と、この加速度に対応する変換値(縦軸)との対応関係(比例関係)を示す情報とされている。なお、図3は、変換値が0〜1023の各整数値からなる10bit加速度センサに対応した特性を示している。このような低レンジ用信号変換マップ33を用いて信号変換処理を行った場合には、−0.5G〜+0.5Gの出力レンジ内の加速度が、0〜1023のいずれかの数値(変換値)に変換されて出力値として出力されることになる。すなわち、低レンジ用信号変換マップ33を用いる場合には、加速度検出部30の検出結果が、±0.5Gの出力レンジの下での出力値として出力されることになる。
【0054】
一方、高レンジ用信号変換マップ34は、図4に示すように、±2Gの比較的高い(広い)出力レンジに亘る加速度(横軸)と、この加速度に対応する変換値(縦軸)との対応関係(比例関係)を示す情報とされている。図4も、図3と同様に、変換値が0〜1023の各整数値からなる10bit加速度センサに対応した特性を示している。このような高レンジ用信号変換マップ34を用いて信号変換処理を行った場合には、−2G〜+2Gの出力レンジ内の加速度が、0〜1023のいずれかの数値(変換値)に変換されて出力値として出力されることになる。すなわち、高レンジ用信号変換マップ34を用いる場合には、加速度検出部30の検出結果が、±2Gの出力レンジの下での出力値として出力されることになる。
【0055】
本実施形態において、信号変換部32は、高レンジ用号変換マップ34をデフォルト選択することによって、高レンジ側の所定の出力レンジとしての±2Gをデフォルト設定するようになっている。このような±2Gの出力レンジにおいては、車両の急加速や急減速によって加速度検出部30の検出結果が大きくなった場合であっても、高い出力レンジ(±2G)によって加速度検出部30の検出結果を十分にカバーすることができ、出力値が出力レンジを振り切ることを防止することができる。
【0056】
さらに、信号変換部32は、デフォルト値(±2G)から低レンジ値(±0.5G)への出力レンジの切り替えを開始すべきレンジ切り替え開始地点に車両が到達したこと、また、当該切り替えを終了すべきレンジ切り替え終了地点に車両が到達したことを、それぞれ自車位置計算部11から入力される測定レンジ信号によって検知するようになっている。測定レンジ信号は、レンジ切り替え開始地点への車両の到達時およびレンジ切り替え終了地点への車両の到達時に自車位置計算部11が信号変換部32に入力するように構成すればよい。このとき、レンジ切り替え開始地点であるか、または、レンジ切り替え終了地点であるかに応じて、測定レンジ信号の内容を異ならせてよいことは勿論である。
【0057】
ここで、切り替え開始地点は、前述した進入判定開始地点および脱出判定開始地点に相当し、切り替え終了地点は、前述した進入判定終了地点および脱出判定終了地点に相当する。
【0058】
そして、信号変換部32は、測定レンジ信号によってレンジ切り替え開始地点への車両の到達を検知した場合には、低レンジ用信号変換マップ33を選択することによって、出力レンジの低レンジ値(±0.5G)への切り替えを開始するようになっている。
【0059】
また、信号変換部32は、このような切り替えを開始した後に、測定レンジ信号によってレンジ切り替え終了地点への車両の到達を検知した場合には、高レンジ用信号変換マップ34を選択することによって出力レンジを高レンジ値(±2G)へと戻すようになっている。
【0060】
図1に戻って、ナビゲーション装置2は、レンジ切り替え開始地点およびレンジ切り替え終了地点のそれぞれの二次元座標が格納された加速度レンジ切り替えテーブル38を有している。この加速度レンジ切り替えテーブル38は、自車位置計算部11が保有するものであってもよいし、地図データ記憶部3に記憶されたものであってもよい。
【0061】
より具体的には、図5に示すように、加速度レンジ切り替えテーブル38には、進入判定用の地点座標として、レンジ切り替え開始地点の座標(X1,Y1)、高速/高架道路側のレンジ切り替え終了地点の座標(X2,Y2)および下道路側のレンジ切り替え終了地点の座標(X3,Y3)が格納されている。また、加速度レンジ切り替えテーブル38には、脱出判定用の地点座標として、レンジ切り替え開始地点の座標(X4,Y4)、高速/高架道路側のレンジ切り替え終了地点の座標(X5,Y5)および下道路側のレンジ切り替え終了地点の座標(X6,Y6)が格納されている。ただし、レンジ切り替え終了地点は、図5に示すように、高速/高架道路に上りきった(あるいは下りきった)地点である必要はなく、レンジ切り替え開始地点から所定距離の地点(上り/下りきる前の地点)であってもよい。
【0062】
そして、自車位置計算部11は、このような加速度レンジ切り替えテーブル38を参照し、自車位置がテーブル34内の座標に一致した場合には、該当する地点に到達した旨の測定レンジ信号を信号変換部32に入力するようになっている。
【0063】
なお、前述した進入判定および脱出判定の開始/終了は、自車位置が加速度レンジ切り替えテーブル38内の各座標にマッチングしたことを契機として行うようにしてもよい。
【0064】
以上の構成によれば、道路の傾斜を検出すべき区間としての進入判定区間および脱出判定区間においては、出力レンジを低レンジ値(±0.5G)に切り替えることによって微小な差分(例えば、2〜3mG)の加速度を検出することができるので、傾斜を高精度に検出することができる。また、切り替え開始地点においては、加速度検出部30の検出結果の値を判定するまでもなく即時に出力レンジを切り替えて対応する出力値を出力することができるので、傾斜の検出をすみやかに開始することができる。
【0065】
なお、信号変換部32に、車両のバスを介してアクセルセンサからのアクセル信号およびブレーキセンサからのブレーキ信号が入力されるように構成した上で、信号変換部32が、進入判定区間および脱出判定区間において、急加速を示す踏み込み量のアクセル信号または急減速を示す踏み込み量のブレーキ信号が入力された場合には、出力レンジをデフォルト値(±2G)に戻すように構成してもよい。ただし、デフォルト値に戻す期間は、急加速または加減速が行われている期間のみでよい。このように構成すれば、進入判定区間および脱出判定区間における急な加減速が行われた場合であっても、そのときの出力値がレンジを振り切ることを防止することができるので、急な加減速が行われた区間の傾斜をある程度正確に検出することができる。
【0066】
次に、本実施形態の作用の一例について図6を参照して説明する。
【0067】
本実施形態においては、まず、図6のステップ1(ST1)において、信号変換部32による高レンジ用信号変換マップ34の選択によって、出力レンジを高レンジ値(±2G)にデフォルト設定し、加速度検出部30の検出結果を、高レンジの出力値に変換して出力するようにする。
【0068】
次いで、ステップ2(ST2)において、信号変換部32により、自車位置計算部11側からの所定の測定レンジ信号の入力の有無に基づいて、車両がレンジ切り替え開始地点に到達したか否かを判定する。そして、ステップ2(ST2)において肯定的な判定結果が得られた場合には、ステップ3(ST3)に進み、否定的な判定結果が得られた場合には、ステップ2(ST2)を繰り返す。
【0069】
次いで、ステップ3(ST3)において、信号変換部32による低レンジ用信号変換マップ33の選択によって、出力レンジの低レンジ値(±0.5G)への切り替えおよび当該低レンジ値の出力値を用いた傾斜の検出を開始する。このステップ3(ST3)における出力レンジの切り替えの開始は、前述した進入判定または脱出判定の開始と同期させればよい。
【0070】
次いで、ステップ4(ST4)において、信号変換部32により、自車位置計算部11側からの所定の測定レンジ信号の入力の有無に基づいて、車両がレンジ切り替え終了地点に到達したか否かを判定する。そして、ステップ4(ST4)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ6(ST6)に進む。
【0071】
ここで、ステップ5(ST5)においては、信号変換部32による高レンジ用信号変換マップ34の選択によって、ステップ3(ST3)において開始した出力レンジの切り替えを終了し、出力レンジをデフォルト値(±0.2G)に戻して処理を終了する。このステップ5(ST5)における出力レンジの切り替えの終了は、進入判定または脱出判定の終了および傾斜検出の終了と同期させればよい。
【0072】
一方、ステップ6(ST6)においては、信号変換部32により、車両側から入力されるアクセル信号またはブレーキ信号に基づいて、急加速または急減速が行われたか否かを判定する。そして、ステップ6(ST6)において肯定的な判定結果が得られた場合には、ステップ5(ST5)に進み、否定的な判定結果が得られた場合には、ステップ4(ST4)に戻る。ただし、ステップ6(ST6)からステップ5(ST5)に進んだ場合には、レンジ切り替え終了地点に到達していないことを条件として、急加速/急減速の終了を待って低レンジ値(±0.5G)に復帰させればよい。
【0073】
(第2実施形態)
次に、本発明に係る加速度センサの第2実施形態について、図7乃至図9を参照して説明する。
【0074】
なお、第1実施形態と基本的構成が同一もしくはこれに類する箇所については、同一の符号を用いて説明する。
【0075】
図1に示すように、本実施形態における加速度センサ40は、ナビゲーション装置2に搭載された状態で、その出力値が進入/脱出判定や危険運転判定に用いられる点においては、第1実施形態の加速度センサ1と同様である。
【0076】
本実施形態の加速度センサ40の第1実施形態との特徴的な相違点は、本実施形態においては、アナログ出力方式の加速度センサが適用され、これにともなって、第1実施形態とは異なる出力レンジの設定を行うように構成されている点にある。
【0077】
すなわち、図7に示すように、本実施形態における加速度センサ40は、複数の加速度検出手段として、低加速度検出部41と高加速度検出部42との2つの加速度検出部41,42を有している。
【0078】
ここで、低加速度検出部41は、図8に示すような±0.5Gの出力レンジを有しており、この出力レンジ内の検出加速度を、図8の出力特性(比例特性)にしたがった5ボルト以内の出力電圧(アナログ値)として制御部31に出力するようになっている。
【0079】
一方、高加速度検出部42は、図9に示すような±2Gの出力レンジを有しており、この出力レンジ内の検出加速度を、図9の出力特性(比例特性)にしたがった5ボルト以内の出力電圧(アナログ値)として制御部31に出力するようになっている。
【0080】
図7に戻って、制御部31は、選択手段としての加速度信号切り替え部43と、信号変換部45とを有している。
【0081】
ここで、加速度信号切り替え部43は、低加速度検出部41および高加速度検出部42のうちのいずれか一方を、出力値の出力に用いるべき加速度検出部として選択し、選択された一方の加速度検出部41,42から出力された出力電圧のみを、信号変換部45にそのまま出力するようになっている。
【0082】
そして、信号変換部45は、加速度信号切り替え部43から出力された出力電圧を、所定の変換特性にしたがって所定ビット数(例えば、10bit)の数値(変換値)に変換し、変換された数値を自車位置計算部11および危険運転判定部27にそれぞれ出力するようになっている。
【0083】
したがって、本実施形態においては、出力レンジの設定を、加速度信号切り替え部43による加速度検出部41,42の選択によって行うようになっている。
【0084】
すなわち、本実施形態においては、高加速度検出部42をデフォルト選択することよって、第1実施形態と同様に高レンジ側の出力レンジ(±2G)をデフォルト設定するようになっている。また、前述した進入/脱出判定区間においては、低加速度検出部41を選択することよって、第1実施形態と同様に低レンジ側の出力レンジ(±0.5G)への切り替えを行うようになっている。なお、その際のレンジ切り替え開始/終了地点の検出については、第1実施形態と同様の測定レンジ信号を加速度信号切り替え部43に入力することによって行うことが可能とされている。
【0085】
また、加速度信号切り替え部43は、進入/脱出判定区間における急な加減速が行われたことをアクセル信号またはブレーキ信号に基づいて検知した場合には、高加速度検出部42を選択することによって第1実施形態と同様に出力レンジをデフォルト設定に戻すようにしてもよい。
【0086】
本実施形態においても、第1実施形態と同様に、道路の傾斜の検出に適した出力レンジを迅速に設定することができる。
【0087】
なお、本発明は、前述した実施の形態に限定されるものではなく、本発明の特徴点を損なわない限度において種々変更することができる。
【0088】
例えば、進入/脱出判定区間において、所定の微小時間周期にしたがって、低レンジ側の出力レンジ(±0.5G)と高レンジ側の出力レンジ(±2G)とを交互に設定するように構成してもよい。ここで、微小時間周期を20msecとした場合には、例えば、はじめの20msecの期間は±0.5Gを設定し、その次の20msecの期間は±2Gを設定し、さらにその次の20msecの期間は±0.5Gを設定するといった処理を連続的に繰り返すことになる。このような構成は、第1実施形態に示した変換マップ33,34の選択および第2実施形態に示した加速度検出部41,42の選択の双方において実現することができる。このように構成すれば、高精度な傾斜の検出および急加減速時における傾斜の検出の双方に適した出力レンジを短時間のうちに交互に設定することができるので、進入/脱出判定区間において傾斜をある程度高精度に検出することができるとともに、当該区間における急加速や急減速に柔軟に対応した傾斜検出を行うことができる。
【0089】
また、信号変換部32,45からの出力値に対応する出力レンジについては、自車位置計算部11および危険運転判定部27が切り替え開始/終了地点と対応付けて予め把握しておけばよい。
【0090】
さらに、前述した実施形態においては、出力レンジとして、2つのレンジが設定されることを説明したが、必要に応じて3つ以上の出力レンジを設定可能としてもよい。
【符号の説明】
【0091】
1 加速度センサ
30 加速度検出部
32 信号変換部
33 低レンジ用信号変換マップ
34 高レンジ用信号変換マップ
【特許請求の範囲】
【請求項1】
車両に搭載された状態で加速度を検出する加速度検出手段を備え、前記加速度検出手段によって検出された前記加速度を、設定された出力レンジの下での出力値として出力する加速度センサであって、
互いに異なる複数の前記出力レンジを選択的に設定可能とされ、
前記複数の出力レンジのうち、前記車両の現在位置、前記車両の走行状態および時間周期の少なくとも1つに応じた前記出力レンジを動的に設定すること
を特徴とする加速度センサ。
【請求項2】
前記加速度検出手段によって検出される加速度と前記出力値との対応関係を示す前記複数の出力レンジごとの変換マップと、
これら複数の出力レンジごとの変換マップのいずれか1つを選択し、選択された前記変換マップを用いて前記加速度検出手段によって検出された加速度の前記出力値への変換を行う変換手段と
を備え、
前記出力レンジの設定を、前記変換手段による前記変換マップの選択によって行うこと
を特徴とする請求項1に記載の加速度センサ。
【請求項3】
前記複数の出力レンジのそれぞれを有する複数の前記加速度検出手段と、
これら複数の加速度検出手段のいずれか1つを、前記出力値の出力に用いるべき加速度検出手段として選択する選択手段と
を備え、
前記出力レンジの設定を、前記選択手段による前記加速度検出手段の選択によって行うこと
を特徴とする請求項1に記載の加速度センサ。
【請求項4】
前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジのうちの低レンジ側の所定の出力レンジを設定すること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の加速度センサ。
【請求項5】
前記車両の走行状態が前記車両の急加速または急減速を示す場合には、前記複数の出力レンジのうちの高レンジ側の所定の出力レンジを設定すること
を特徴とする請求項4に記載の加速度センサ。
【請求項6】
前記高レンジ側の所定の出力レンジをデフォルト設定すること
を特徴とする請求項5に記載の加速度センサ。
【請求項7】
前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジを所定の微小時間周期にしたがって交互に設定すること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の加速度センサ。
【請求項1】
車両に搭載された状態で加速度を検出する加速度検出手段を備え、前記加速度検出手段によって検出された前記加速度を、設定された出力レンジの下での出力値として出力する加速度センサであって、
互いに異なる複数の前記出力レンジを選択的に設定可能とされ、
前記複数の出力レンジのうち、前記車両の現在位置、前記車両の走行状態および時間周期の少なくとも1つに応じた前記出力レンジを動的に設定すること
を特徴とする加速度センサ。
【請求項2】
前記加速度検出手段によって検出される加速度と前記出力値との対応関係を示す前記複数の出力レンジごとの変換マップと、
これら複数の出力レンジごとの変換マップのいずれか1つを選択し、選択された前記変換マップを用いて前記加速度検出手段によって検出された加速度の前記出力値への変換を行う変換手段と
を備え、
前記出力レンジの設定を、前記変換手段による前記変換マップの選択によって行うこと
を特徴とする請求項1に記載の加速度センサ。
【請求項3】
前記複数の出力レンジのそれぞれを有する複数の前記加速度検出手段と、
これら複数の加速度検出手段のいずれか1つを、前記出力値の出力に用いるべき加速度検出手段として選択する選択手段と
を備え、
前記出力レンジの設定を、前記選択手段による前記加速度検出手段の選択によって行うこと
を特徴とする請求項1に記載の加速度センサ。
【請求項4】
前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジのうちの低レンジ側の所定の出力レンジを設定すること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の加速度センサ。
【請求項5】
前記車両の走行状態が前記車両の急加速または急減速を示す場合には、前記複数の出力レンジのうちの高レンジ側の所定の出力レンジを設定すること
を特徴とする請求項4に記載の加速度センサ。
【請求項6】
前記高レンジ側の所定の出力レンジをデフォルト設定すること
を特徴とする請求項5に記載の加速度センサ。
【請求項7】
前記車両の現在位置が道路の傾斜を検出すべき区間に該当する場合には、前記複数の出力レンジを所定の微小時間周期にしたがって交互に設定すること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の加速度センサ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−32269(P2012−32269A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−171893(P2010−171893)
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月30日(2010.7.30)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]