
加速度計およびGPS受信機を用いた発射体の誘導
発射体には、その本体の直交座標系があることを特徴とする、ジャイロを持たない発射体誘導システム。この発射体には、3軸の加速度計があり、x、y、およびz軸に沿って測定したx、y、およびz加速度データを提供する。GPSアンテナおよび受信機手段は、機内に搭載したGPSからの位置および速度データを、地球の基準航行座標系で提供する。コンピュータおよびプログラム手段は、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、またそれにアクセスし、さらに、x、y、およびz軸加速度データを、本体座標系から航行座標系へと変換する。プログラム手段は、対応する時間インデックス付き加速度データと、GPS速度データおよび位置データとに応答し、推定した発射体のロール角、ピッチ角、およびヨー角を、最適なスムージング技術を用いて、現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して計算し、発射体を所定の位置に誘導する飛行制御システムに出力する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS信号を用いて航空機または発射体の姿勢を測定し推定する分野に関する。このシステムは、発射体のロール角を推定する第1および第2の加速度計と、ピッチ角を推定するもう1つ別の第3の加速度計からの情報とを用い、さらに、GPS信号への妨害電波の影響を検出し、回避する手段を含む。
【背景技術】
【0002】
解決すべき一般問題は、打ち出された発射体を、最低のコストと妥当な信頼性で、既知の地理的位置にある目標にいかに誘導するか、ということである。本出願は、その問題の一部を、発射体の発射からの軌道を推定し、この発射体の発射直後の初期条件を与え、発射時あるいは打ち出された時に計算した発射体の理想的な軌道を提供することにより、さらに、GPS信号に対する妨害電波の影響を確実に検出し、回避することにより解決するものである。
【0003】
この解決すべき問題への最初の方法は、GPS受信機とロール・カウンタとを用いたものであった。このようなシステムは、相対的に安価な解を提供するが、GPSへの妨害電波には弱い可能性がある。従って、確実に、破損していないGPS信号を受信し、処理するために実行すべきなんらかの追加措置、例えば、GPS信号の保護などが必要となる可能性がある。
【0004】
2番目の方法は、コストが上乗せされるが、GPS受信機、ロール・カウンタ、および3軸ジャイロを用いたものであった。最初の方法と同様に、この2番目の方法は、目標にいたるまでのほぼ全行程で、GPS信号を保護する必要がある。最初の方法と同様、GPS信号が失われた場合、発射体の飛行中に、その発射体に作用する可能性があるあらゆる外力を排除する方法がないため、このような保護が必要となる。従って、GPS信号との干渉、例えばGPS信号への妨害電波に対するシステムおよび対応の脆弱性を可能な限り小さくし、また除去しつつも、目標へ発射体を誘導するシステムおよび方法が必要となる。
【0005】
この必要性を満足させる過去の試みは、GPS信号との干渉を防止するか、あるいは限られたGPSデータだけで動作を可能にするかのいずれかに重点が置かれていた。限られたGPSデータだけで動作を可能にする試みは、発射体に搭載された慣性計測器の性能および/または機能性を高めることを必要としていた。例えば、GPS信号が失われる可能性がある場合、外力に対する発射体の反応を排除する上記2番目の方法の無力さを解決するために、加速度計をシステムに追加して組み込み、外力に対する発射体の反応を補償できるようにすればよい。例えば、センサ・パッケージで、完全なIMUを構成できる可能性がある。航空機用のジャイロ計器はよく知られており、鉄回転子ジャイロ、同調回転子ジャイロ、リング・レーザ・ジャイロ、マルチ振動子ジャイロ、ゼロ・ロック・ジャイロ(zero lock gyro: ZLG)、光ファイバ・ジャイロ、HRG(半球型共振ジャイロ)や平板セラミック共振ジャイロなどの共振ジャイロ、といった多くの技術により利用可能である。
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、残念なことに、ジャイロは既にパッケージとして組込まれているので、ジャイロ計器および/または加速度計を追加して組込むことは、大幅なコスト高になると考えられる。さらに、このような計器を使用すると、発射体の動作包絡線にあらたな制約を加えることになる。例えば、ジャイロ計器は、通常、15,000〜30,000Gである発射時の加速度に関する故障モードや不確定性に従う。さらにこの技術を用いると、その移動体は、ジンバルを備えた構成、あるいは紐で固定した構成で、費用、重量、および電力損失といった付随するデメリットがある少なくとも1つのジャイロを搭載する必要がある。
【0007】
従って、GPS信号に対する妨害電波の存在下で、および/または限られたGPSデータで発射体を誘導するための改良されたコスト効率の良いシステムおよび方法があると都合が良い。
【課題を解決するための手段】
【0008】
本発明のシステムおよび方法の第1の例示的実施形態によれば、ジャイロを用いない発射体は、GPS信号と3軸の加速度計とを用いて目標に向かって誘導される。コンピュータに実装した方法は、3軸加速度計からのデータと共に、GPS位置データおよびGPSデルタ速度データを用い、発射体の推定姿勢をピッチ、ロール、およびヨーという角度で決定する。GPS受信機が受信したGPS信号が与えるデータから分かった発射体の位置を用いて、コンピュータに実装した方法は、搭載したGPSが必要な数の衛星を追尾すると、航行座標系における発射体の姿勢を決定し、発射体の軌道に関する時間インデックス付きの記録を生成する。この軌道に関する時間インデックス付きの記録にあるデータは、フィルタリングおよびスムージングされる。発射体がローリングすると、加速度計は、この発射体に作用する力を測定するのに用いられ、また、この発射体の回転角速度を測定するのに用いられる。本発明の、その他一部の実施形態では、GPSは、発射前の発射管に位置している際に、初期の照準および速度誤差を計算し、また、加速度計を構成するためのデータを提供するために用いられる。
【0009】
この手法に関するコストは、必ず使う必要がある加速度計の精度に大きく依存しており、発射体に必要な発射精度によって異なる。コストを引き下げなければならない場合は、発射後のGPS信号データに大きく信頼を置くことによって、より精度の低い加速度計を用いることができる。従って、合理的な水準の発射体の発射精度を維持しながらコストを引き下げるためには、GPS信号データに大きく信頼を置く必要がある。このように、本発明のある側面は、信頼性が向上したGPS信号に対して提供するものである。
【0010】
例示的実施形態では、GPS信号データは、1つまたは複数の衛星から送信され、発射体上の1つまたは複数のアンテナで受信したGPS信号から取得することが可能である。1つまたは複数のGPS信号に対する妨害電波に遭遇する可能性がある場合は、対応する1つまたは複数のGPS信号妨害電波検出器が、各GPS信号を監視し、各信号が妨害電波を受けているかどうかを検出するために含まれてもよい。そのような妨害電波が検出されると、妨害電波対抗装置が、GPS信号保護対策を実施することになる。
【0011】
例示的実施形態では、GPS信号保護対策には、発射体に周期的動作、例えばローリングをさせる、あるいはさせたままの状態にすることと、この発射体の周期的動作を用いて(例えば、選択的かつ周期的に妨害電波を示すGPS信号を回避することによって)、妨害電波の影響を受けたGPS信号を検出して除外し、さらに妨害電波の影響を受けていない信号の確実な処理を可能にするという方法で、GPS信号を選択的にサンプリングすることとが含まれる。発射体が、その周期的動作の各周期(つまり、ローリングの各周期)を通過するに従い、1つまたは複数のアンテナそれぞれは、1つまたは複数の衛星それぞれからのGPS信号を受信するために、周期的に位置を合わせることに留意されたい。このように、少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能な状態でいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる(例えば、少なくとも一部のローリング姿勢にいる間は)。
【0012】
あるいは、発射体が回転していない場合などのように、発射体の動作によって、1つまたは複数のアンテナが、連続して妨害電波の影響を受けていないGPS信号を受信するように、正しい方位に向いた状態のままでいられるような場合は、例示的妨害電波保護対策は、1つまたは複数のアンテナが受信したGPS信号に妨害電波の影響がないかどうかを検出し、GPS受信機を、妨害電波の影響がない信号のみを使用するように切り替えることを含んでもよい。この例示的実施形態では、発射体は回転する必要もローリングする必要も無いことに留意されたい。従って、この保護対策は、ローリング安定ではない発射体で実施することが可能である。また、この実施形態によれば、アンテナは、スリップ・リングなどの機構によって、発射体の本体から分離しても良いことに留意されたい。従って、アンテナが、1つまたは複数の衛星に関して固定した方位に維持されている間は、この発射体は、回転またはローリング安定状態でよい。同様に、アンテナが、1つまたは複数の衛星に関して、周期的動作、例えば回転を受けている間は、発射体はその状態のままでよい。
【0013】
他の例示的保護対策としては、RF信号からデジタル信号へのGPS信号の変換と、自動利得制御の実施とを含むことが可能である。その実施形態の場合、各GPS信号は、受信直後または受信後かなり早いうちに、高速アナログ/デジタル変換器で変換することができる。なお、その変換したデジタルGPS信号は、デジタル処理で実現した自動利得制御回路を通過することができる。このアナログ/デジタル変換器と自動利得制御回路とは、ともにGPS無線受信機に実装することができる。
【発明を実施するための最良の形態】
【0014】
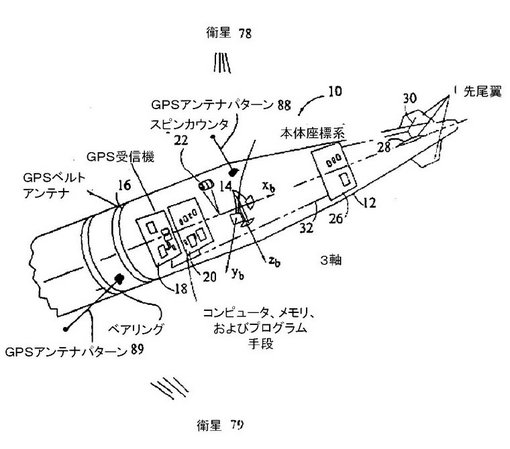
図1に、ジャイロ10が組込まれていない発射体誘導システムの例示的実施形態における主要構成部品を、発射体12の分解斜視図として示す。この発射体12は、砲台(図示せず)から発射された後の飛行中の状態で図示されている。
【0015】
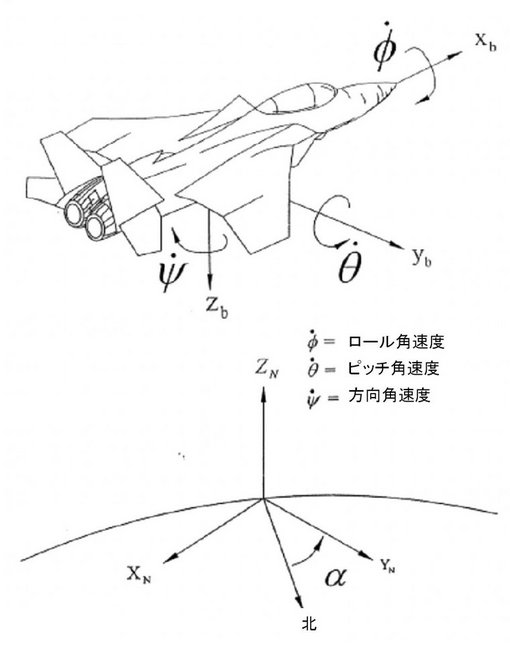
また、この発射体は、直交座標系で示される。図4には、航空機と、それに対応する直交座標系とを示す。また、図4には、ロールφ、ピッチθ、およびヨーψの各回転角速度成分を、長手方向軸xb、ピッチ軸yb、およびヨー軸zbとともに定義する。さらに、図4には、局所的なレベルで固定された地球航行座標系も併せて示す。ワンダー角がゼロの時は、YN軸は経線に平行で、真北を指す。また、XN軸は、緯線に平行で、東を指し、ZN軸は、重力ベクトルとして地球の表面から伸びる。角αは、位置特異点と遭遇せずに地球の両極を横切るために、航行システムで用いられる。飛行中は、発射体の加速度や速度などの時間インデックス付きデータ要素の各成分は、通常の方向余弦行列を用いて、下付き文字「b」で表示される発射体の座標から、下付き文字「N」で表示される地球基準座標でのデータ要素に変換される。
【0016】
再び図1を参照すると、ジャイロなしの発射体誘導システムによって誘導される発射体には、3軸の加速度計14がある。この3軸の加速度計には、xb軸に沿って測定されたx軸加速度データを提供するx軸加速度計、yb軸に沿って測定されたy軸加速度データを提供するy軸加速度計、およびzb軸に沿って測定されたz軸加速度データを提供するz軸加速度計がある。ベルト16で表されるGPSアンテナとモジュール18で表されるGPS受信機とが組み合わされて、地球の基準航行座標系での、搭載したGPSの位置・高度データおよびGPSの速度データを提供する手段を表す。別のアンテナ・パターン88、89は、1つまたは複数の衛星78、79からのGPSデータを受信するように構成される。図には、アンテナ・パターン88、89およびアンテナ・ベルト16しか示していないが、任意の数のアンテナ、任意の構成のアンテナ、および/または任意の方位に向いたアンテナが発射体上には含まれてもよいことに留意されたい。ただし、この各アンテナは、異なる方向または一連の方向からくるGPS信号を受信するように構成され、その方位を定められる(例えば、各アンテナ・パターンには、それぞれ異なる方向あるいは一連の方向に向けられたローブ(突出部)がある)。同様に、ただ1つのGPS受信機18のみが図には示されているが、複数のGPS受信機を、発射体上に実装された特定の数の、特定の構成を有す、特定の方位に向いたアンテナを介して受信したGPS信号の処理に合うように実装しても良いことに留意されたい。
【0017】
モジュール20は、誘導用のプロセッサを示し、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、アクセスするために、また本明細書中で説明するようなGPS信号の保護対策を実現するために、さらにx、y、およびz軸加速度データを、発射体の座標系から航行座標系へと変換するためにコンピュータ、メモリ、およびプログラム手段という機能を提供する。この加速度データはアレイ化され、また、個の加速度データには、GPS位置データおよび速度データに対する時間インデックスと共通の時間インデックスがある。ロール・カウンタ22は、飛行中に、地球の磁場における発射体の回転角速度を表す交流信号を出力する。
【0018】
モジュール20上のコンピュータ、メモリ、およびプログラム手段は、プログラム中の繰り返される時間インデックスごとに、現在の位置データ、速度データ、および加速度データを、モジュール26で表される飛行制御・弾道データ・システムに与え、この発射体を所定の目標地点に誘導するのに用いるために、局所的なレベルの地球航行基準座標に関して、対応する時間インデックス付きの加速度データ、GPS速度データ、および位置データを受信して応答し、対応する発射体のロール角、ピッチ角、およびヨー角の時間インデックス付き推定値を計算して出力する。
【0019】
この飛行制御・弾道データ・システムは、先尾翼28、30などの操縦翼面に指令を与え、発射体を目標地点までの軌道上に維持することによってこの発射体を制御する。カードまたはモジュール26で表される飛行制御・弾道データ・システムの選択および/または設計は、設計上の選択であり、本発明の主題ではない。いずれにせよ、この発射体が、例えば、ローリング(横揺れ)などの周期的な動きを行っている場合は、操縦翼面の方位が、この発射体の所望の進行方向と一致するのを待つことによって、軌道修正を行うことができると本発明では規定する。
【0020】
また、本発明は、軌道修正が大きく、発射体の誘導部分がローリング安定である場合は、この発射体は、回転を停止することができ、ローリング安定化モードに入っているときに修正を行うことができることも企図している。そして、修正が完了すると、この発射体は、ローリング状態の発射体に復帰することができる。本発明は、発射体のローリング方位を決定する方法を備えることによって、このような機能を可能にする。例えば、図3cを参照すると、発射体のローリング方位は、(1)回転ジャイロ、(2)GPS衛星が回転をオン・オフする時のローリング位置、(3)複数のアンテナを用いたGPSによる姿勢決定、および(4)磁気スピン・カウンタを介して決定することができる。
【0021】
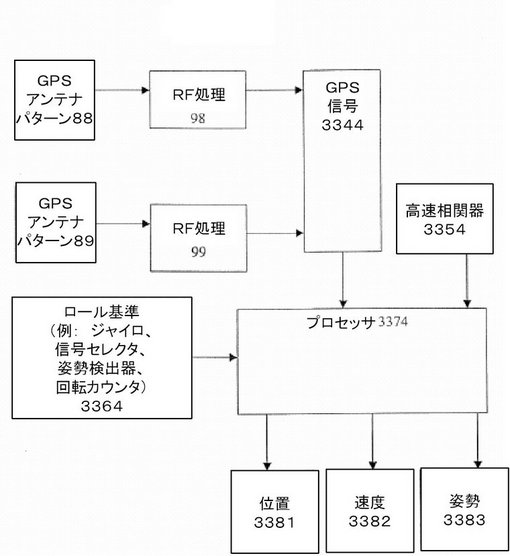
例示的実施形態では、 GPS信号データは、1つまたは複数の衛星78、79から送信されたGPS信号から得ることができ、発射体上の1つまたは複数のアンテナ88、89で受信する。さらに、図3cを参照すると、例示的実施形態では、複数のGPSアンテナ・パターン88、89は、GPS信号を受信し、その信号は、次にRF処理手段98、99を通過してRF処理が施されたGPS信号3344を生成する。高速相関器3354からの情報と、参照ローリング・データ3364が、RF処理が施されたGPS信号3344とともにプロセッサ3374に送信される。この信号3344、3354、3364に基づいて、プロセッサ3374は、位置信号3381、速度信号3382、および姿勢信号3383を生成する。
【0022】
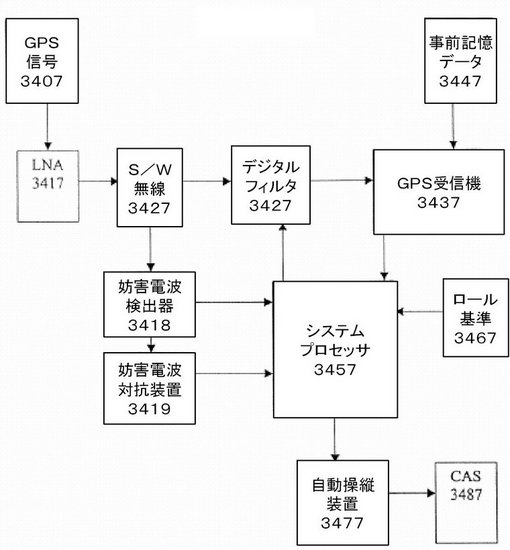
図3dに示すように、各GPS信号3407は、無線受信機3427が受信する前に、低雑音増幅器3417を通過しても良い。また、例示的実施形態では、1つまたは複数のGPS信号妨害電波検出器3418が、各GPS信号3407を監視し、その各GPS信号が妨害電波に曝されていないかどうかを検出するために含まれてもよい。そのような妨害電波が検出されると、妨害電波対抗装置3419が、GPS信号保護対策を実施する。この保護対策としては、例えば、選択的かつ周期的に妨害電波を示すGPS信号を、発射体のアンテナ部の周期的動作によって回避する方法もある。図3dに示すように、妨害電波検出器3418と妨害電波対抗装置3419は、信号をシステム・プロセッサ3457に送信する。このシステム・プロセッサは、同時に、参照ローリング・データ3467とGPS受信機3437からの情報も受信する。システム・プロセッサ3457から受信した信号に基づき、デジタル・フィルタ3427は、GPS信号を無線受信機3427から受信し、このGPS信号の妨害電波の影響を受けていない部分を選択的にGPS受信機3437に送信する。GPS受信機3437は、次に、事前に記憶しておいたデータ3447を用い、GPS信号を処理し、システム・プロセッサ3457に送信する。最後に、システム・プロセッサ3457は、参照ローリング・データ3467とGPS信号とを利用して、自動操縦装置3477に信号を送信し、操縦翼面3487を動かし、それによって発射体を目標に誘導する。
【0023】
例示的実施形態では、GPS信号保護対策には、発射体に周期的動作(例えば、回転、ローリング、あるいは振動)をさせる、あるいはさせたままの状態にすることと、この発射体の周期的動作を用いて、妨害電波の影響を受けたGPS信号を検出して除外し、さらに妨害電波の影響を受けていない信号の確実な処理を可能にするという方法で、GPS信号を選択的にサンプリングすることとが含まれる。発射体が、その周期的動作の各周期を通過(つまり、ローリングまたは回転、振動、あるいは他の周期的動作の各周期を通過)するに従い、1つまたは複数のアンテナ88、89それぞれは、1つまたは複数の衛星78、79それぞれからのGPS信号を受信するために、周期的に位置を合わせることに留意されたい。このように、少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能なままでいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる(例えば、少なくとも一部のローリング姿勢にいる間は)。
【0024】
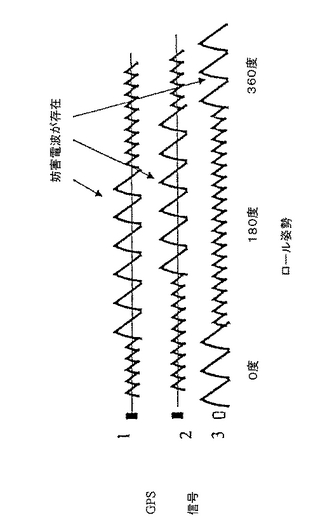
図8に、3種類の時間依存性を持つGPS信号の典型例を示す。この信号は、例えば回転などの周期的動作を受けている発射体上に実装された、それぞれ対応するGPSアンテナと受信手段とにより受信されたものである。図8に示すように、第1のGPS信号は、発射体が約30度から約210度までの方位で回転するときに妨害電波を示す。同様に、第2のGPS信号は、発射体が約120度から約360度までの方位で回転するときに妨害電波を示す。さらに、第3のGPS信号は、発射体が約360度から約30度までの方位で回転するときに妨害電波を示す。従って、実質的に連続した妨害電波の影響を受けていないGPS信号は、第1のアンテナを、発射体が約210度と約30度の間で回転するときにスイッチをオンにし、第2のアンテナを、発射体が約360度と約120度の間で回転するときにスイッチをオンにし、第3のアンテナを、発射体が約30度と約360度の間で回転するときにスイッチをオンにし、第1のアンテナを、発射体が約30度と約210度の間で回転するときにスイッチをオフにし、第2のアンテナを、発射体が約120度と約360度の間で回転するときにスイッチをオフにし、第3のアンテナを、発射体が約360度と約30度の間で回転するときにスイッチをオフにすることにより受信することが可能となる。
【0025】
さらに、図1の一実施形態では、飛行制御・弾道データ・システム26は、ジャイロ無しの発射体誘導システム12からバス32を介して提供された情報を用いるために、あるいは、発射後、発射体の回転を止め、発射体の先端を空の方に向けて大雑把に位置合わせをするために、あるいは、GPS信号の受信を最適化するために、アンテナ・パターン88、89を正しい方位に合わせるために事前にプログラミングされる。この実施形態によれば、発射体の回転が止まると、加速度計が取り出されて始動する。コンピュータ、メモリ、およびプログラム手段は、次に、この移動体の角速度推定値を含む状態行列の最初の推定と更新とを行う。この例示的実施形態によれば、発射体の動作によって、1つまたは複数のアンテナ88、89が、連続して妨害電波の影響を受けていないGPS信号を受信するように、正しい方位に向いた状態のままでいられるような場合、妨害電波対抗装置3419は、1つまたは複数のアンテナが受信したGPS信号3407には、妨害電波の影響がないということを検出し、1つまたは複数のGPS受信機18を、妨害電波の影響がない信号のみを使用するように切り替える、あるいは使用させることができる。この例示的実施形態では、妨害電波の影響を受けていないGPS信号は、発射体がローリングしなくても受信できることに留意されたい。このことを実現するためには、コンピュータに実装された処理は、1つまたは複数のアンテナが、妨害電波の影響を受けていないGPS信号を実質的に連続して受信するように、GPSアンテナの方位と受信手段とを発射体が維持するような誘導プログラムとして実施すればよい。
【0026】
この例示的実施形態では、発射体は回転する必要もローリングする必要も無いことに留意されたい。従って、この保護対策は、ローリング安定ではない発射体で実施することが可能である。また、この実施形態によれば、アンテナは、スリップ・リングなどの機構によって、発射体の本体から分離しても良いことに留意されたい。従って、アンテナが、1つまたは複数の衛星に関して固定した方位に維持されている間は、この発射体は、回転またはローリング安定状態でよい。同様に、アンテナが、1つまたは複数の衛星に関して、周期的動作、例えば回転を受けている間は、発射体はその状態のままでよい。
【0027】
このように、本発明によれば、発射体は、例えば、発射体の本体から、スリップ・リングを用いてアンテナを分離することによって、回転またはローリング安定状態でもよい。妨害電波の影響を受けていないGPS信号を、実質的に連続して受信しない場合は、妨害電波対抗手段は、発射体が、周期的動作に入り、選択的にかつ周期的に妨害電波を示すGPS信号を回避するように構成すればよい。
【0028】
他の例示的保護対策としては、RF信号からデジタル信号へのGPS信号の即時変換と、自動利得制御の実施とを含むことが可能である。その実施形態の場合、各GPS信号は、受信直後または受信後かなり早いうちに、高速アナログ/デジタル変換器で変換することができる。そして、そのデジタルGPS信号は、デジタル処理で実現した自動利得制御回路を通過する。このアナログ/デジタル変換器と自動利得制御回路とは、ともにGPS無線受信機に実装することができる。
【0029】
例示的実施形態では、このシステムは、発射前に初期化するように構成することが可能である。この実施形態によれば、発射体の発射に先立って、システムは、どの衛星が、この発射体の軌道全体にわたって各アンテナ・パターン88、89の視野(FOV)内に入るであろうか、また衛星78、79のどの組合せなら、この軌道の最高のGDOPを与えるのかを判定し、メモリに記憶することができる。この情報が、入手可能な他の補正データとともに受信機18に事前に記憶される。
【0030】
図3dに示すように、例示的実施形態では、GPS信号3407は、低雑音増幅器3417を経由して、高速アナログ/デジタル変換器(例えば、毎秒5ギガビットで14ビットの分解能を有すアナログ/デジタル変換器)を備えることが可能な無線受信機3427に送信される。無線受信機3427もまた、デジタル処理で実施した自動利得制御回路を備えることができる。信号は、次に、一組のデジタル・フィルタ3427と、1つまたは複数の妨害電波検出器3418とに送信される。個々のフィルタ3427は、TOA計算で用いる予定の事前に選択した各衛星に対して実装することができることに留意されたい。また、デジタル・フィルタ3427は、事前に選択した各衛星の周波数帯域が通過するように、リアルタイムで動的に調整することができることに留意されたい。この通過帯域の中心は、発射体と衛星との間のドップラー運動に対して調整されたGPS搬送周波数である。次に、GPS信号は、GPS受信機3437に送信され、そこで、高速デジタル相関器3447と、決定した位置および速度とを用いて、事前に選択した各衛星の既知のコードに対して相互に関連付けられる。
【0031】
この移動体がローリングをしている場合は、加速度計の交流信号を、直流信号あるいは定常状態信号から分離することによって角速度情報が抽出される。この発射体はローリングしているので、ピッチおよびヨー加速度計からの出力信号は、正弦波関数として変化することになる。この移動体がローリングしていない場合は、データは本体の座標系から抽出され、必要に応じて、DCM(方向余弦行列)関係を用いて地球の基準航行座標系へと移される。
【0032】
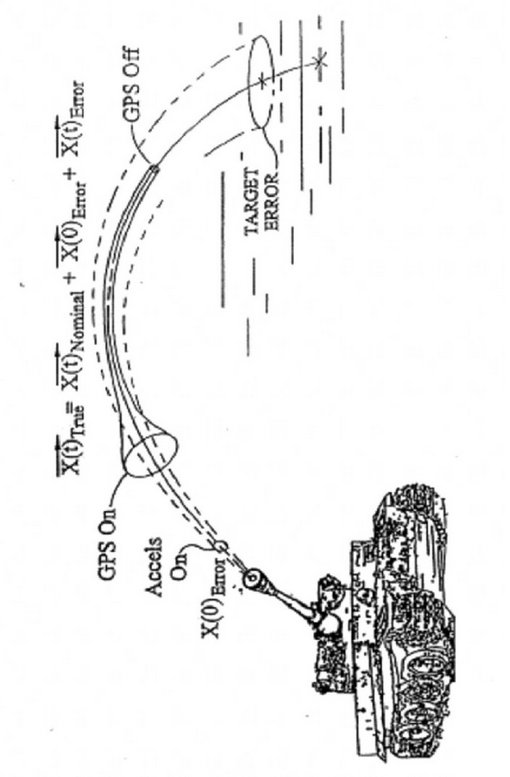
図2に、目標に向かって発射体を発射する移動抱兵器を示す。図に示す方程式
は、計算した発射体の真の位置を時間の関数として表すベクトル量である。
は、理想的な軌道上の、発射体の理想的な位置を表すベクトルである。
は、発射前の時間ゼロにおける発射体の位置に関する誤差を表すベクトルである。
は、航法計器の誤差およびGPS誤差に由来する累積的誤差による発射体の位置に関する誤差を表すベクトルである。この図は、一連の事象を示し、TARGET ERRORと示す楕円に帰着する破線によって誤差量の領域を概略的に示す。この誤差は、誘導手段を搭載していない火砲に対する通常のやり方で、発射体を発射することによって生じ得るものである。実線のじょうご状の領域は、次第に減少し、誘導手段が搭載されていない場合の軌道に対するTARGET ERRORよりもかなり小さな極限に漸近的に近づく搭載GPSの位置に関する誤差を概略的に示す。本発明のジャイロ10を持たない発射体誘導システムは、3台で一組の加速器を用い、リアルタイムの本体参照データをコンピュータ、メモリ、およびプログラム手段に提供し、また、発射体の姿勢を定め、また姿勢データを出力するために、GPSからのリアルタイムの位置データを提供する。この出力はカルマン・フィルタを通過し、じょうご状領域によって囲まれた領域内に、発射体の方向を定めるために用いる支援用GPS位置データとともに、図1のモジュール26で表される飛行制御・弾道データ・システムと結び付けて用いられる。
【0033】
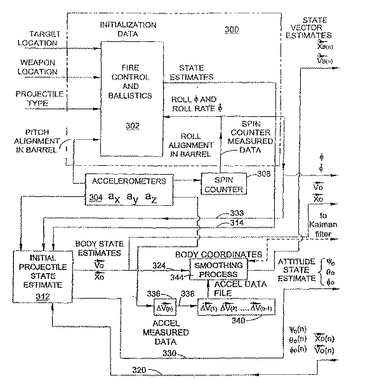
図3aおよび3bに、ジャイロ10を利用しない発射体誘導システムが用いるデータ・フローの実施形態を示す。2点鎖線で囲まれたブロック300は、発射制御・弾道用コンピュータが提供する機能を表し、このコンピュータは、初期化プログラムを実行し、データ・ソースから受信したデータを処理する。このデータ・ソースには、TARGET LOCATION(目標位置)、この発射体を発射する兵器の地理的位置、PROJECTILE TYPE(発射体のタイプ)、PITCH ALIGNMENT IN BARREL(発射管でのピッチ・アライメント)、発射管のピッチ角、発射体座標系における3軸3成分の加速度ax、ay、az304の出力、ロール角(ROLLφ)、およびスピン・カウンタ308からのロール角速度(ROLL RATEφ)などがある。FIRE CONTROL AND BALLISTICS(発射制御・弾道用)コンピュータは、入手可能なデータを処理し、発射前に、初期方位角、発射体本体の固定角速度、現在の位置、および初期速度成分などの初期状態のデータを転送する。スピン・カウンタ308および3軸加速度計304は、そのデータを、それぞれ信号経路314と333とを介して、直接、INITIAL PROJECTILE STATE ESTIMATE(発射体の初期状態推定)機能312に与える。すべての初期条件は、FIRE CONTROL AND BALLISTICS機能302などの外部ソースから、電気、磁気、または光リンク、あるいは場合によっては機械リンクを介して発射体に入力される可能性が高い。もし、発射台が船舶上に搭載予定だった場合は、初期条件は、発射台が受信する初期条件を送信したステーションに対するこの船舶の速度、向き、船舶の慣性誘導用コンピュータからの変位、および、おそらく発射台の座標も含むように拡張されていたであろう。
【0034】
FIRE CONTROL AND BALLISTICS機能302は、ゼロ基準を設けるためにロール・インデックス付与情報をスピン・カウンタ308にも提供する。このスピン・カウンタ308は、ロール角φbの推定値を、ロール角速度φbと同様に2〜3度の精度で提供する。FIRE CONTROL AND BALLISTICS機能302は、予測弾道軌道を事前計算し、この結果も発射体に送る。加速度計の情報とともに、この弾道情報、あるいはFIRE CONTROL AND BALLISTICS機能302からの直接データが用いられ、推定処理の初期化時点で、初期状態ベクトルと発射体の姿勢とを決定する。加速度計のデータとGPSのデータとが状態推定に利用できる場合は、アルゴリズムは初期化される。FIRE CONTROL AND BALLISTICS機能302は、適合テストの失敗の結果を受けて、ESTIMATION OF NEW INITIAL TARGET STATE(目標の新たな初期状態の推定)機能322から、信号経路320を介して、発射体の方位と位置とに関する一組の初期状態も受信する。
【0035】
FIRE CONTROL AND BALLISTICS機能302は、一組の初期のSTATE ESTIMATE(状態推定値)を、INITIAL PROJECTILE STATE ESTIMATE機能ブロック312に出力し、この機能ブロック312は、次に、初期のBODY STATE ESTIMATES(本体状態推定値)
、
を、信号経路324を介してSMOOTHING PROCESS(スムージング処理)機能ブロック344に転送し、一組のATTITUDE STATE ESTIMATES(姿勢状態推定値)を、信号経路330を介してATTIDUDE FILE(姿勢ファイル)332にある初期姿勢角度アレイの初期状態推定機能に転送する。
【0036】
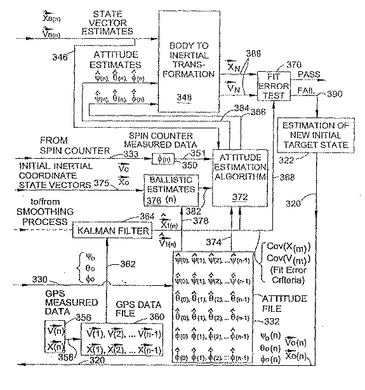
回転カウント・データをFIRE CONTROL AND BALLISTICS機能302に提供した回転カウンタまたはSPIN COUNTER(スピン・カウンタ)308は、回転カウント・データを、信号線333を介してINITIAL PROJECTILE STATE ESTIMATE機能ブロック312と、図3bで機能ブロック350として表されている時間インデックス付きSPIN COUNTER MEASURED DATA(スピン・カウンタ測定データ)用メモリ・アレイとにも提供する。そして、このメモリ・アレイ350で、発射体の全ロール角φ(n)が蓄積され、また時間インデックスを付与され、次に、経路351を介してATTITUDE ESTIMATION ALGORITHM(姿勢推定アルゴリズム)372に転送される。スピン・カウンタ技術は、成熟した技術である。アライアント・テックシステムズ(Alliant Techsystems)社は、20mmの発射体に適合するのに十分小さなカウンタを開発したと伝えられる。従って、直径が大きな発射体用の回転カウンタは、本発明のシステムおよび方法に使用するために、容易に購入することができる製品である。回転カウンタの出力は、発射体が地球の磁場の中を回転するので、正弦波出力である。
【0037】
発射体のINITIAL PROJECTILE STATE ESTIMATE機能ブロック312は、アジマス角ψ0、ピッチ角θ0、およびロール角φ0に対する初期のATTITUDE STATE ESTIMATE値を、図3bに示すATTITUDE FILE332に初期値として提供する。
【0038】
本体の座標系における加速度の3軸3成分ax、ay、azの出力は、ブロック336で示される機能によって処理され、本体基準の時間インデックス付き速度変化を、信号経路338を介してACCEL DATA FILE(アクセル・データ・ファイル)用メモリ・アレイ340に転送する。このACCEL DATA FILE用メモリ・アレイ340は、一連の時間インデックス付き加速度データ要素を、SMOOTHING PROCESS機能ブロック344に送信する。
【0039】
ブロック344でのフィルタリングおよびスムージング処理については、図6、7a、および7bに関連して、本明細書の後半で説明する。このスムージング処理は、姿勢、速度、および位置の初期値を、加速度計の現在のデータと併せて用い、本体座標系における発射体の速度と位置とを決定する。スムージング処理での出力は、位置と速度に対するSTATE VECTOR ESTIMATES(状態ベクトルの推定値)
、
であり、信号経路346を介して、BODY TO INERTIAL TRANSFORMATION(本体から慣性への変換)機能ブロック348に送信される。
【0040】
GPS MEASURED DATA(GPS測定データ)機能ブロック356は、周期的に、時間インデックス付き速度データ
と位置データ
とを受信し、このデータを、信号経路358を介して機能ブロック360として示すコンピュータ、メモリ、およびプログラム手段の時間インデックス付きアレイに転送する。このGPS速度データと位置データとは、信号経路362を介して機能ブロック364によって示されるカルマン・フィルタに転送される。このカルマン・フィルタは、発射体の現在の推定位置ベクトルおよび推定速度ベクトルのフィルタリングした値を、信号経路368を介してFIT ERROR TEST(適合誤差試験)機能ブロックとATTITUDE ESTIMATION ALGORITHM機能ブロック372とに転送する。ATTITUDE FILE332は、時間インデックス付き推定姿勢角度データと推定姿勢角速度データとを、信号経路374を介してATTITUDE ESTIMATION ALGORITHM機能ブロック372に、また転送経路378を介してBALLISTIC ESTIMATES(弾道推定)(n)機能ブロック376に、地球の基準航行座標系において転送する。BALLISTICS ESTIMATESは、経路375を介して、補正済みの初期位置および初期速度に関する情報を備えた発射体の既知のモデル特性を用い、また、経路378を介して、過去の姿勢および姿勢速度すべての履歴とを用い、モデル化した現在の位置と速度の推定値を、経路382を介してATTITUDE ESTIMATION ALGORITHM372に提供する。
【0041】
本体の直交座標系におけるフィルタリングした本体のSTATE VECTOR ESTIMATES
、
ベクトルは、信号経路346を介してBODY TO INERTIAL TRANSFORMATIONブロック348に転送される。このBODY TO INERTIAL TRANSFORMATIONブロック348は、推定した姿勢角および姿勢角速度を、信号経路384および386を介して受信し、STATE VECTOR ESTIMATESを、本体の直交座標系での表示から地球の基準航行座標系でのベクトルへ、さらに地球の基準航行座標系での位置および速度推定値へと、通常の方向余弦変換を用いて処理する。この通常の方向余弦変換は、例えば、George Siourisの教科書「Aerospace Avionics Systems, A Modern Synthesis」(アカデミック・プレス(Academic Press)社、1993年出版)に説明されるような変換である。この推定処理は、測定した回転カウンタのデータを用いて、また新しい弾道軌道を、新しい初期状態情報に基づき計算することによって簡略化することができ、また改善することができる。
【0042】
BODY TO INERTIAL TRANSFORMATION機能ブロック348は、地球の基準航行座標系での推定した位置と速度STATE VECTOR ESTIMATESを、経路388を介してFIT ERROR TEST機能ブロック370に出力し、そこで、STATE VECTOR ESTIMATESは、カルマン・フィルタを通過したGPSの位置および速度と比較される。統計的な意味では、GPSの位置およびGPSに付随する誤差以上に推定処理を適合させるのは、可能ではない。2つの状態ベクトル間の相違に対する誤差が、GPS誤差の1〜2倍よりも小さければ、アルゴリズムは、この適合処理は「統計的に十分良い」ので終了できると宣言し、新しい測定データが到着するのを待つ。テストを通過すれば、位置、速度、姿勢、および姿勢角速度の推定値は、推定した位置と姿勢の時間インデックス付きメモリ・アレイ中の(n−1)の位置を更新するのに用いられる。
【0043】
テストに失敗すると、アルゴリズムは、一組の新しい発射体の初期状態を、摂動アルゴリズムを用いて推定し、解が所定の適合誤差の閾値範囲内にある極限に収束するまで、推定処理を再度繰り返す。さらに、テストに失敗すると、FAIL信号が、経路390を介し、ESTIMATION OF NEW INITIAL TARGET STATE機能ブロック322に送信され、そこで、初期の位置、速度、姿勢、および姿勢角速度が調整され、一組の修正した推定状態データが、信号経路320を介して、追加サイクルのためにINITIAL PROJECTILE STATE ESTIMATE機能ブロック312に送信される。繰り返しは、機能ブロック370からPASS信号が出るように、初期条件が調整されるまで続き、PASS信号の後には、1秒後にGPSデータを用いた次のデータの繰り返しが始まる。
【0044】
前に説明したように、GPSおよびGPS信号の保護に対する過度の信頼を避けるために、高性能慣性計測器(例えば、100マイクロgよりも良い水準で実行する慣性計測器)を用いても良い。ハネウエル(Honeywell)社のVBA加速度計、およびWoodland Hills、California 916637にあるノースロップ・グラマン社(Northrop Grumman Inc.リットン社の譲受人)のリットン社ガイダンス&コントロールシステム部門(Litton Guidance & Control Systems Div.)が供給するSilicon Accelerometer(シリコン加速度計)とには、そのような機能がある。
【0045】
アライアント・テックシステムズ社のGPS受信機は、本発明のシステムおよび方法において利用可能である。このアライアント社のGPSは、十分な処理能力があり、ユーザのソフトウェアを記憶するのに用いることができる別個のメモリがあるタイプ509プロセッサと、この用途向けのシステム・プロセッサとを用いる。また、このアライアント社の受信機は、発射体がローリングする際に、GPS信号を保護する手段としての複数のアンテナ入力を収容する複数のRFフロントエンドで構成される。GPSの509プロセッサは、データを処理し、慣性データを、GPSデータおよび回転カウンタのデータと統合するのに用いることもできる。ソフトウェアは、509プロセッサに組み込み、角速度情報を3軸加速度計から抽出し、センサからのデータと統合することができる。
【0046】
あるいは、コストを引き下げなければならない場合は、発射後のGPS信号データに大きく信頼を置くことによって、より精度の低い加速度計を用いることができる。上記のように、例示的実施形態では、GPS信号データは、1つまたは複数の衛星78、79から送信され、発射体上の1つまたは複数のアンテナ88、89で受信されるGPS信号から取得することができる。1つまたは複数のGPS信号妨害電波検出器3418は、各GPS信号3407を監視し、各GPS信号3407が妨害電波の影響を受けているかどうかを検出するために含まれてもよい。この妨害電波が検出されると、妨害電波対抗装置3419は、システム・プロセッサ3457にあるGPS信号保護対策を実施することができる。
【0047】
例えば、妨害電波対抗装置3419によって、システム・プロセッサ3457は、発射体にローリングや回転などの周期的動作をさせる、あるいは発射体を周期的動作状態のままにすることができる。発射体が、その周期的動作の各周期を通過、つまり、ローリングの各周期を通過するに従い、1つまたは複数のアンテナ88、89それぞれは、1つまたは複数の衛星78、79それぞれからのGPS信号を受信するように、周期的に位置を合わせることができる。このように、衛星からの少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能なままでいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる。例えば、少なくとも一部のローリング姿勢にいる間などである。
【0048】
あるいは、妨害電波検出器3418が、1つまたは複数のGPS信号中に妨害電波を検出しない場合は、妨害電波対抗装置3419によって、システム・プロセッサ3457は、発射体の回転を止め、この発射体の先端を空の方に向けて大雑把に位置合わせをするように、あるいは、GPS信号3407の受信を最適化するために、アンテナ・パターン88、89を正しい方位に合わせるようにできる。この実施形態によれば、発射体の回転が止まると、加速度計が取り出されて始動する。コンピュータ、メモリ、およびプログラム手段は、次に、この移動体の角速度推定値を含む状態行列の最初の推定と更新とを行う。この例示的実施形態によれば、妨害電波対抗装置3419は、1つまたは複数のGPS受信機18またはシステム・プロセッサ3457を、1つまたは複数のアンテナによって受信された妨害電波の影響がない信号のみを使用するように切り替える、あるいは使用することができる。
【0049】
誘導された発射体のロール角は、通常は、ジャイロまたはジャイロ・プラットフォームによって与えられる。この発射体のロール角を特徴付けるロール角信号は、飛行制御システムが、必要に応じて左または右に発射体をローリングさせるために先尾翼などの飛行操縦翼面の駆動と、目標に向いた1方向に発射体の向きを変えるために揚力面からの揚力の利用とを可能にするために必要である。本開示の目的は、ジャイロからの信号を用いずに、3軸加速度計からの出力と、GPSからの位置およびと速度信号とを用いることで発射体のロール角を発生させるための数学的方法、つまりコンピュータ・プログラミングが可能な方法を提供することである。
【0050】
ここでの技術的説明には、以下の表記法を使用する。
は、特定の基準座標系を持たずに分解したベクトルを表す。
は、本体座標系または発射体座標系と呼ぶ座標系で分解したベクトルを表す。この本体座標系を含み、本明細書で説明に用いるすべての座標系は、前方または正の「xb」軸方向、右手または正の「yb」軸方向、および下向きまたは正の「zb」軸方向に伸びる直交する3軸を形成するために、重心、あるいは基準点「ゼロ」と指定された基点などの発射体本体のある位置から伸びるx軸、y軸、およびz軸を備えた右手系の直交座標系である。少なくとも2台の加速度計が、yb軸とzb軸とに沿って本体座標系に固定され、配列される。b座標系のこれらの主軸は、慣性センサの入力軸と一致し、起点「O」で交差する。重要な第2の座標系は、主軸X、Y、およびZを備えた地理的または地球の基準航行座標系であり、これらの主軸は、図4の下部に示すように東、北、および上(Up)方向と一致する。
【0051】
ベクトルの下付き文字は、ベクトルの特有の性質または帰属を示すのに用いられる。行列は大文字で指定される。
は、方向余弦行列(DCM)であり、ベクトルを、N座標系または航行座標系から本体座標系へと変換する。つまり、
である。量の時間依存性は、時間変数または時間インデックスを丸括弧で囲んで表される。例えば、
は、時間t1での航行座標系から本体座標系への変換に対するDCMである。
DCMの転置は、
を与え、これは、時間t1での本体座標系から航行座標系への変換に対するDCMである。
【0052】
変数の増加分は、記号Δで示される。例えば、
は、所定の時間間隔に対するベクトル
の増加分を表す。変数の誤差は、記号
で示される。例えば、
は、ベクトル
の誤差を表す。記号=は、近似的に、あるいは実質的に等しいことを表す。
【0053】
センサと方位
【0054】
2台の加速度計の構成では、第1の加速度計は、本体の右側から外向きに伸びるyb本体軸に沿って加速度を感知するように位置合わせをされる。第2の加速度計は、ヨー軸を形成する基点から下向きに伸びるzb本体軸に沿って加速度を感知するように位置合わせをされる。ロール変数の計算には不要である第3の加速度計は、xb軸あるいは前方軸に沿って加速度を感知するように位置合わせをされる。
【0055】
ロール角の計算
【0056】
加速度計の出力は、本体座標系から航行座標系の値に、次の方程式に従って変換される。
【数1a】
【0057】
ここで、この手順において、固定航行座標系または地球基準の東(X)、北(Y)および上(Z)に沿った成分からなる航行座標系での移動体の加速度要素として加速度ベクトルANを得るために、Abは本体座標系での加速度ベクトルを表し、括弧付きのH、P、およびR演算子{H}T、{P}T、および{R}Tは、移動体または発射体の固定座標系におけるzb軸に関する飛行方向またはヨー、yb軸に関するピッチ、およびxbに関するロールに対して、本体座標系から航行座標系への正回転のDCM変換の転置を表す。
【0058】
DCMである{T}は、ユニタリ行列を表し、本体の基準加速度データを、北、東、および下という座標系から、東、北、および上という座標系に変換し、次のように定義される。
【数1b】
【0059】
発射体上の3軸加速度計からの加速度のデータ要素Abは、航行座標における速度変化を求めるために、次の方程式を用いて、例えば1秒といった所定増分の時間間隔にわたって積分される。
【数2】
【0060】
この加速度計のデータに基づく速度変化の各計算と同時に、GPSデータが速度変化の計算に用いられる。このGPSデータは、既に、航行座標系である。この計算には、次の方程式が用いられる。
【数3】
【0061】
次の方程式を用いて、本体座標系から航行座標系への変換と共に、本体の加速度計からのデータに対して二重積分が実行され、本体座標系から変換された加速度計のデータに基づき、位置の変化を得る。
【数4】
【0062】
加速度計のデータに基づく位置変化ΔPNの各計算と共に、GPSデータは、実質的に等しいGPSの位置変化ΔPGPSについての次の方程式を用いた計算に用いられる。
【数5】
【0063】
群方程式
【0064】
DCM行列とその転置行列との積が単位行列に等しい。従って、
【数6a】
【数6b】
【0065】
方程式3から、GPSデータからの速度成分または加速度成分の変化を、次のように、加速度計のデータからの速度成分の変化に関係付けることが可能である。
【数7a】
【0066】
方程式5から、GPSデータからの位置成分または加速度成分の変化を、次のように、加速度計のデータからの位置成分の変化に関係付けることが可能である。
【数7b】
【0067】
ピッチDCM、方向DCM、およびユニタリ変換DCMを、グループ化、または乗算して1つのDCM、すなわち{Q}を作り、簡単にするために時間の増分を1秒とすると(但し、当然のことながら、式ではあらゆる時間の増分を用いることができる)、
【数8a】
[数8b]
ΔT=1秒、およびΔ2=1秒の2乗=1
【0068】
式7aのΔTに1を代入し、式7bのΔT2に1を代入し、式7aと7bの両辺にユニタリの転置を掛けると、方向DCMとピッチDCMは、その順序で次の方程式を与える。
【数9a】
【数9b】
【0069】
CPをCosθとし、SPをSinθ、CHをCosψ、SHをSinψ、CRをCosφ、およびSRをSinφとして用いると、本体座標系から航行座標系への回転変換に対する6種類のDCMは、次のようになる。
【数10a】
【数10b】
【数10c】
【0070】
本体が、発射台から発射された発射体の場合は、ピッチ角は発射時の発射管の角であり、方向は、発射時に発射管が真北となす角ψである。どちらも、このシステムの初期化の時点からあり、時間に対する通常の軌道に近接していると期待される。従って、表面上は既知である。
【0071】
{Q}の要素は、式8a、10a、および10bからわかり、ゆっくり変化すると考えられる。そこで、{Q}を次のようにおく。
【数11】
【0072】
式9aと9bとを書き直し、{Q}を、ΔT=1秒およびΔT2=1秒という条件で{P}{H}{T}の結果に代入すると、次の式が得られる。
【数12a】
【数12b】
【0073】
左辺と右辺とを入れ替えると、
【数13a】
【数13b】
【0074】
ロールDCMは、式10cで表され、加速度計のデータはベクトルであるので、
【数10d】
であり、
【数14】
である。ここで、
、
、および
は、本体の各軸に沿った単位ベクトルである。
【0075】
式13aと13bとは、次のように書き直される。
【数15a】
【数15b】
【0076】
加速度計のデータの増加分と、GPSからの速度データの増加分とが、固定航行座標系で利用可能となり、次に示す2つの3要素ベクトルを作る。
【数16a】
【数16b】
ここで、
、
、および
は、東、北、および上という座標系の基本単位ベクトルである。
【0077】
式15aおよび15bにおける{Q}に対する行列を、式16aおよび16bと掛けると、
【数17a】
【数17b】
を得る。
【0078】
式17aおよび17bの左辺を3×1行列と掛けると、左辺は、
【数18a】
【数18b】
となる。
【0079】
式18aと18bの左辺にあるベクトルの最初の要素a1は、移動体の長手方向軸まわりの加速度を落とすことを表すので、a1には各ロール成分はない。従って、それは削除し、2番目と3番目の行の表式を残す。すると、式18aおよび18bより、
【数19a】
【数19b】
【0080】
式19aおよび19bの左辺は、2×2行列と2×1行列との積に書き直すことができる。
【数20a】
【数20b】
【0081】
式20aと20bとを一緒にすると、
【数20c】
【0082】
ロール角の計算は、次の定義を用いる。
【数20d】
これが、加速度計係数行列である。
【数20e】
これが、ピッチ/方向係数行列である。
【数20f】
これが、GPS情報ベクトルである。
【数20g】
これが、未知のロール量である。式20cを書き直すと、
【数21】
【0083】
a1行列は、4×2行列である。
は、2×1ベクトルである。式21は、2つの未知数(CR、SR)に関する4つの方程式を表すことを考え、式21を
について解く。式21の両辺にa1Ta1を掛けると、
【数22a】
a1Ta1積の逆行列を左から掛けると、
【数22b】
従って、
【数23a】
なので、ロール角は、
【数23b】
となる。
【0084】
この手順は、その後、次のサンプリング時間に対して、以下のように過剰決定システムを再び解く。t=t2のときは、2つの未知数(cosR、sinR)を持つ8個の方程式があり、t=tnのときは、2つの未知数(cosR、sinR)を持つ4n個の方程式がある。
【0085】
反復計算解は、次のように方程式を重ねることによって得られる(t=t2の場合)。
【数24】
ここで、a1、β1、およびω1は、上記に規定される。新しい変数a2、β2、およびω2は、t=t2のときの値であることを除けばa1、β1、およびω1と同じ構造である。また、
は、2つのサンプリング時間にわたる変数を用いて、cosRとsinRの値を表す。t=t2での解は、このため、前と同様に、次のように求まる。
【数25】
【数26】
【0086】
同様に、n個のデータ・サンプルに対して、t=tnで、
【数27】
【数28】
【0087】
一般的な発射体または移動体に対しては、ピッチおよび方向係数行列に対するデータも必要である。方向とピッチ(ジャイロ無しの場合)は対地軌道(arctan Vn/Ve)から近似でき、ピッチは飛行経路角(垂直速度または高度の変化率の逆正接関数、およびΔP(北)とΔP(東)とから決定する対地速度)から近似できる。大雑把な方向は、ハネウエル社から入手可能な磁気コンパスまたは固体磁気コンパスで分かる。上層風が分かっていれば、方向を補正するのにその風を利用してもよく、迎え角が分かっていれば、それをピッチ角の補正に利用すればよい。
【0088】
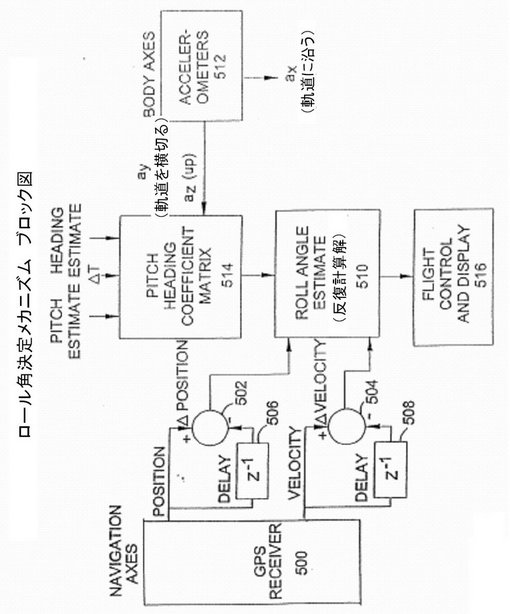
図5は、ロール角の計算に必要な処理機能の概要を示すブロック図である。POSITIONサンプラ502およびVELOCITYサンプラ504を介して、POSITIONデータおよびVELOCITYデータを与える内部コンピュータを備えたGPS RECEIVER(GPS受信機)を表すブロック500を示す。各サンプラには、それぞれサンプラ遅延(装置)506、508がある。このサンプラからの出力は、ΔPOTISIONおよびΔVELOCITYであり、このデータが、ROLL ESTIMATE(反復計算解)機能ブロック510に送信される。ACCELEROMETERS(加速度計)ブロック512は、上記で説明したBODY AXES(本体座標軸)に位置合わせされた3軸加速度計を表す。加速度成分axは、図に示すように、発射体の長手方向軸に位置合わせされる。この加速度成分axは、飛行中は、ある瞬間から次の瞬間へと非常にゆっくりと変化する。図1に示すように、加速度成分ayは、軌道を横切る方向の加速度であり、加速度成分azは、上方向軸に沿った加速度成分である。PITCH HEADING COEFFICIENT MATRIX (ピッチおよび方向係数行列)514は、加速度データayとazとで初期化される。このデータの処理は、三角法の値に対して、現在のPITCH ESTIMATE(ピッチ推定値)およびHEADING ESTIMATE(方向推定値)を用いる。入力ΔTには、ある瞬間に好適な値があることが示されることになる。PITCH HEADING COEFFICIENT MATRIXは、GPSからのΔPOSITIONおよびΔVELOCITY入力とともに、ROLL ESTIMATE(ロール角推定)機能ブロック510によって用いられ、ロール角φを、図1のブロック26を含むFLIGHT CONTROLブロック516に出力する。
【0089】
スムージング
【0090】
ここで、図3aのブロック344で示されるスムージング処理を、図6、7aおよび7bの説明と関連付けて説明する。本発明の加速度計とGPS受信機とを備えた発射体誘導システムは、この発射体の飛行全体にわたって、発射から現在の位置までの過去の軌道についてのスムージングした推定値を、姿勢角とともに図1と5とに示したFLIGHT CONTROLブロック26に出力し、この飛行制御機能26が、既知の目標地点に対する発射体の方向または対地軌道を調整する。
【0091】
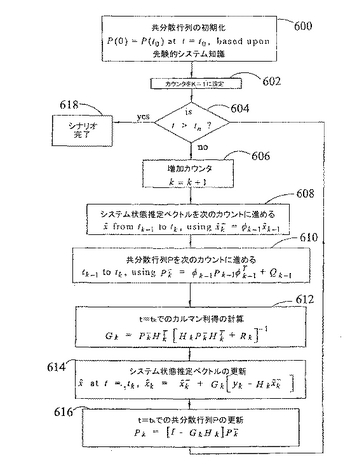
図6にフォワード・スムーザの実施形態を示す。この実施形態は、カルマン・フィルタを用いる。図3bのブロック364で示すカルマン・フィルタは、時間t1、t2、・・・tnでn個の測定値{y1、y2、・・・yn}があるフィルタである。
【0092】
時間tkでの測定値は、計測器からの加速度データ、あるいはGPS入力または加速度計データからの速度または一部の位置データ、または一部の速度または位置データが、ΔVデータとして含まれ、これらの値は、yベクトルの値として{y1、y2、・・・yn}のようにアレイ化される。我々が必要としているのは、各更新時のシステム状態の推定値である。
【0093】
この処理は、1Hzのサンプリング速度で、GPS情報を用いて時間インデックスまたはサンプル・インデックスが付けられる。GPSサンプル間で、測定インデックス・カウンタまたはkカウンタを用いて、このシステムは過去のサンプルと状態すべての再処理を行い、インデックスが1からnまでカウントされるように、インデックスを与える。
【0094】
この処理には、過去のサンプリング時間tkでのシステム状態ベクトルについての知識に基づいた推定値を得るために、時間の流れをさかのぼる目的がある。GPS位置データなどの測定データは、サンプルnとしてインデックスを付与された測定値として受信した最後のサンプルとともに、サンプル1からkとして取得または受信したように、インデックスを付与される。
【0095】
図6は、開始時の処理の初期状態に関する知識に基づくt=t0での共分散行列の初期化P(0)=P(t0)を行うブロック600で開始する。ブロック602は、サンプル・インデックス・カウンタ(kカウンタ)が、1にセットされたのを示し、ブロック604は、時間tがtnよりも大かどうかを確認するテストを行う。その時間が、tn以下の場合は、テストはブロック606に進み、インデックス・カウンタを1だけ増加させる。
【0096】
ブロック608は、システム状態ベクトルまたは推定状態ベクトルχを、時間tk−1からtkに進めるステップを表す。記号φk−1は、システム方程式または伝達関数を表す。この伝達関数φk−1が、システムの状態ベクトルχを、時間tk−1からtkに進める。状態行列「χ」として表された状態ベクトルは、「m」×1次元の列行列である。共分散行列Pは、「m」×「m」次元である。
【0097】
次に、この処理はブロック610に進む。このステップでは、フローチャートにより、方程式
を用いて、共分散行列Pが時間tk−1からtkに進められる。この方程式では、項Pkは、状態ベクトル
のフィルタ推定に関連する誤差の共分散行列である。伝達関数φk−1とその転置
とが、この式に導入される。項Qk−1は、処理雑音の共分散行列である。
【0098】
ブロック612では、時間t=tkでのカルマン・フィルタの利得を計算する。記号Gkは、カルマン利得を表す。項Hkは、時間t=tkでの測定行列または観測行列であり、
は、時間t=tkでの測定行列の転置を表す。この測定行列は、通常は、VXやVYなどの要素から構成される。yベクトルまたは測定ベクトルは、H行列と状態ベクトルχの積で作られ、この積が、測定雑音行列に加算される。
【0099】
ブロック612にある式中の括弧内で、誤差共分散行列
は、測定行列の転置
と乗算される。この2つの積は、次に、測定行列Hkと乗算される。この積の結果が測定雑音ベクトルの共分散行列Rkに加算される。
【0100】
このRk行列は、実証的検定によってシステム・エンジニアが集めた情報から得られる。システム・エンジニアは、何の雑音がどのセンサと関連しているのかを、各測定変数に関する蓄積された雑音データを集めることで決定する。HK行列は、既知であり、ハードウェアや機器に依存したものである。カルマン利得が決定されると、次に、これは、ブロック614での状態ベクトルの推定を更新するのに用いられる。各測定値が選ばれるときは、その測定値自身が状態の結合関数である。例えば、発射体の速度は、速度のxおよびy成分の結果として生じたものであろう。この結果は、それぞれの測定値の一次結合である。
【0101】
処理はブロック614に進み、方程式
を用いて、システム状態推定ベクトルが、時間tkに対して更新される。項Hkは、項
と乗算する。その結果は、ykから差し引かれる。この結果は、観測可能な差異であり、それにカルマン利得を掛け、次に前の推定状態ベクトル
を加える。
【0102】
の上付き文字におけるマイナス符号は、k番目の更新よりも少し前の状態を表すことを意味する。サンプル・インデックス「k」は、1からnまでの値をとることが可能である。ここで、nは、時間的に最も新しい更新インデックスである。上付き文字が無い状態変数は、状態変数値が、更新直後に存在する値であることを意味する。記号
は、状態ベクトルχのk番目の推定値を表す。yk測定が行われた場合、k番目の更新は、このyk測定に対して行われる。測定インデックス「k」は、実行インデックスである。
【0103】
時間t=tkで、ブロック614に示す方程式の値を求めることによって状態ベクトルを更新すると、処理は、ブロック616の次に示す方程式へと進む。
【数29】
この式は、共分散行列Pkを更新するのに用いられる。行列Iは、単位行列である。別項に特に記載がなければ、その要素のすべては、主対角要素を除いてゼロである。単位行列の次元は、Gk行列とHk行列の積と一致する。共分散行列の計算に必要なすべての値は、これより以前のステップから入手可能である。
【0104】
Pk行列の計算後、処理は、ブロック616を抜け出し、判定ブロック604に戻り、再び、t>tnであるかどうかを確認するテストを行う。時間がtnに達すると、測定値すべてが処理される。これ以上の追加測定は行われない。ここで「Yes」の結果、処理は、シナリオ完了ブロック618へと進み、処理の役目は完了する。飛行が100秒間続き、GPSが毎秒1回の割合で一測定値を提供したならば、100個のGPSサンプルがあったであろうし、サンプル・インデックスkは、1から100まで増加したことになったであろう。インデックス「k」は、100を越えることはできない。
【0105】
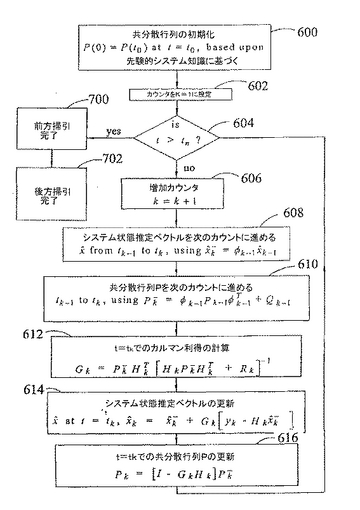
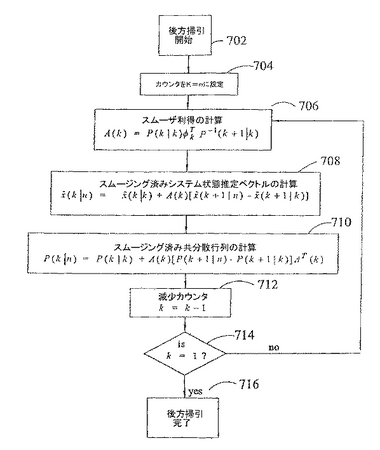
図7aおよび7bで、固定間隔スムーザが形成され、図7aは前方パスを規定し、図7bは後方パスを規定する。図7aは、ブロック700を除いて図6と機能的に同一と見ることができる。この処理は、ブロック700を出た後、ブロック702に進む。このブロック702は、図7bの先頭にもある。後方掃引は、サンプル・インデックス・カウンタ、つまりkカウンタを現在のインデックス値nにして、ブロック704で開始する。図7bに示す後方掃引処理の目的は、スムーザの推定値
、およびスムーザの誤差の共分散行列
を、インデックス・カウンタ「k」が、k=n、n−1、n−2、・・・、1へと減少するときのn個の測定値すべてを用いて計算することである。式χs(k)および式Ps(k)の下付き文字sは、スムージングされた変数であることを示す。
【0106】
この処理は、ブロック706に進み、次の式で表されるスムーザ利得を計算する。
【数30】
(k|k)などの項における「k」が後に続く縦棒は、行列が、k番目の測定値を含む、それまでのすべての測定値に対し、値が求められることを意味する。後方掃引は、前方掃引が終了した後のみ開始する。k個すべての測定値は、前方掃引の終了と共に入手可能である。k個のデータ点すべてによって、固定間隔が形成され、tkからt1までのn個の測定値すべてが、後方掃引に間に用いられる。
【0107】
共分散行列P(k|k)は、時間t=kでの伝達関数φkの転置と乗算される。
【0108】
ブロック706の最も右側の項は、k個の測定値すべてを用いた、時間tk+1での共分散行列P(k+1|k)の逆行列である。「k」が後に続く縦棒は、kまでの測定値に対するデータすべてが用いられることを示す。
【0109】
この処理は、次に、ブロック708に進む。ブロック708における方程式の目的は、スムージングされた状態ベクトル
を、n個の測定値すべてを用いて計算することである。このブロック708にある方程式は、次のとおりである。
【数31】
【0110】
利得行列A(k)は、ブロック706で得られる。等号の後にある最初の項は、k番目の測定までに行われた測定データを用いたk番目の状態ベクトル推定値である。括弧内の第1項
は、n番目の測定までに行われた測定データを用いた、時間k+1での状態ベクトル推定値である。括弧内の第2項
は、時間tkまでのすべての測定値を用いた、時間k+1での状態ベクトル推定値である。この差は、第1項から第2項を引くことで計算される。その結果が、利得行列に掛けられ、さらにその積が
に加えられる。
【0111】
次に、処理はブロック710に進み、スムージングされた共分散行列を、次の方程式を用いて計算する。
【数32】
【0112】
等号の後にある最初の共分散項P(k|k)は、k番目の更新までのすべてのデータを用いる。括弧内の最初の共分散項P(k+1|n)は、n番目の測定までに行った測定データすべてを用いる。括弧内の2番目の共分散項P(k+1|k)は、k番目の更新までのデータのみを用いる。共分散行列の差は、この括弧内の2つの共分散項によって計算される。この共分散項の差は、次に、利得行列と掛けられ、さらにその結果がP(k|k)に加えられる。
【0113】
スムージングされた共分散推定が計算されると、処理はブロック712に進み、測定インデックス・カウンタをkからk−1に減少させる。この処理は、次に判定ブロック714に進み、測定インデックス行列kが1よりも大きいかどうか判定するテストが行われる。「No」という判定の場合は、k=1になるまでループまたはサイクルが続き、ブロック706に戻る。k=1になると、ブロック714でのテストは、「Yes」判定を生じ、この処理は後方掃引完了ブロックであるブロック716に進む。ブロック716は、発射体が目標に接近しているというプログラムの完了信号を出す。
【0114】
これらの好適な実施形態に関する各種の改良形態や修正形態が、この発明の範囲や精神から逸脱することなく構成可能であることは、当業者には当然のことである。従って、当然のことながら、添付の請求項の範囲内で、この発明は、本明細書に具体的に記載したような方法以外で実現することが可能である。
【図面の簡単な説明】
【0115】
【図1】機内搭載用GPS受信機、移動体の構造に連結された一組の加速度計、複数のアンテナ、および本発明の方法を実行するための機内搭載用コンピュータ・カードを備えた発射体または無人運転の飛行装置の分解斜視図である。
【図2】発射用車両、および軌道周囲にある飛行誤差包絡線を備えた所望の軌道を示す図である。
【図3a】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3b】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3c】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3d】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図4】通常の座標系を示し、回転角を定義する航空機の斜視図である。
【図5】ロール角計算での機能ステップを示すブロック図である。
【図6】通常のカルマン・フィルタにおける処理ステップと、別のロール角の計算とを示すフローチャートである。
【図7a】通常のスムーザにおける前方フィルタの各ステップを示すフローチャートである。
【図7b】通常のスムーザにおける後方フィルタの各ステップを示すフローチャートである。
【図8】GPS信号妨害電波が存在しているときの、回転発射体上の複数のアンテナによって受信された時間依存性を持つGPS信号を示す図である。
【技術分野】
【0001】
本発明は、GPS信号を用いて航空機または発射体の姿勢を測定し推定する分野に関する。このシステムは、発射体のロール角を推定する第1および第2の加速度計と、ピッチ角を推定するもう1つ別の第3の加速度計からの情報とを用い、さらに、GPS信号への妨害電波の影響を検出し、回避する手段を含む。
【背景技術】
【0002】
解決すべき一般問題は、打ち出された発射体を、最低のコストと妥当な信頼性で、既知の地理的位置にある目標にいかに誘導するか、ということである。本出願は、その問題の一部を、発射体の発射からの軌道を推定し、この発射体の発射直後の初期条件を与え、発射時あるいは打ち出された時に計算した発射体の理想的な軌道を提供することにより、さらに、GPS信号に対する妨害電波の影響を確実に検出し、回避することにより解決するものである。
【0003】
この解決すべき問題への最初の方法は、GPS受信機とロール・カウンタとを用いたものであった。このようなシステムは、相対的に安価な解を提供するが、GPSへの妨害電波には弱い可能性がある。従って、確実に、破損していないGPS信号を受信し、処理するために実行すべきなんらかの追加措置、例えば、GPS信号の保護などが必要となる可能性がある。
【0004】
2番目の方法は、コストが上乗せされるが、GPS受信機、ロール・カウンタ、および3軸ジャイロを用いたものであった。最初の方法と同様に、この2番目の方法は、目標にいたるまでのほぼ全行程で、GPS信号を保護する必要がある。最初の方法と同様、GPS信号が失われた場合、発射体の飛行中に、その発射体に作用する可能性があるあらゆる外力を排除する方法がないため、このような保護が必要となる。従って、GPS信号との干渉、例えばGPS信号への妨害電波に対するシステムおよび対応の脆弱性を可能な限り小さくし、また除去しつつも、目標へ発射体を誘導するシステムおよび方法が必要となる。
【0005】
この必要性を満足させる過去の試みは、GPS信号との干渉を防止するか、あるいは限られたGPSデータだけで動作を可能にするかのいずれかに重点が置かれていた。限られたGPSデータだけで動作を可能にする試みは、発射体に搭載された慣性計測器の性能および/または機能性を高めることを必要としていた。例えば、GPS信号が失われる可能性がある場合、外力に対する発射体の反応を排除する上記2番目の方法の無力さを解決するために、加速度計をシステムに追加して組み込み、外力に対する発射体の反応を補償できるようにすればよい。例えば、センサ・パッケージで、完全なIMUを構成できる可能性がある。航空機用のジャイロ計器はよく知られており、鉄回転子ジャイロ、同調回転子ジャイロ、リング・レーザ・ジャイロ、マルチ振動子ジャイロ、ゼロ・ロック・ジャイロ(zero lock gyro: ZLG)、光ファイバ・ジャイロ、HRG(半球型共振ジャイロ)や平板セラミック共振ジャイロなどの共振ジャイロ、といった多くの技術により利用可能である。
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、残念なことに、ジャイロは既にパッケージとして組込まれているので、ジャイロ計器および/または加速度計を追加して組込むことは、大幅なコスト高になると考えられる。さらに、このような計器を使用すると、発射体の動作包絡線にあらたな制約を加えることになる。例えば、ジャイロ計器は、通常、15,000〜30,000Gである発射時の加速度に関する故障モードや不確定性に従う。さらにこの技術を用いると、その移動体は、ジンバルを備えた構成、あるいは紐で固定した構成で、費用、重量、および電力損失といった付随するデメリットがある少なくとも1つのジャイロを搭載する必要がある。
【0007】
従って、GPS信号に対する妨害電波の存在下で、および/または限られたGPSデータで発射体を誘導するための改良されたコスト効率の良いシステムおよび方法があると都合が良い。
【課題を解決するための手段】
【0008】
本発明のシステムおよび方法の第1の例示的実施形態によれば、ジャイロを用いない発射体は、GPS信号と3軸の加速度計とを用いて目標に向かって誘導される。コンピュータに実装した方法は、3軸加速度計からのデータと共に、GPS位置データおよびGPSデルタ速度データを用い、発射体の推定姿勢をピッチ、ロール、およびヨーという角度で決定する。GPS受信機が受信したGPS信号が与えるデータから分かった発射体の位置を用いて、コンピュータに実装した方法は、搭載したGPSが必要な数の衛星を追尾すると、航行座標系における発射体の姿勢を決定し、発射体の軌道に関する時間インデックス付きの記録を生成する。この軌道に関する時間インデックス付きの記録にあるデータは、フィルタリングおよびスムージングされる。発射体がローリングすると、加速度計は、この発射体に作用する力を測定するのに用いられ、また、この発射体の回転角速度を測定するのに用いられる。本発明の、その他一部の実施形態では、GPSは、発射前の発射管に位置している際に、初期の照準および速度誤差を計算し、また、加速度計を構成するためのデータを提供するために用いられる。
【0009】
この手法に関するコストは、必ず使う必要がある加速度計の精度に大きく依存しており、発射体に必要な発射精度によって異なる。コストを引き下げなければならない場合は、発射後のGPS信号データに大きく信頼を置くことによって、より精度の低い加速度計を用いることができる。従って、合理的な水準の発射体の発射精度を維持しながらコストを引き下げるためには、GPS信号データに大きく信頼を置く必要がある。このように、本発明のある側面は、信頼性が向上したGPS信号に対して提供するものである。
【0010】
例示的実施形態では、GPS信号データは、1つまたは複数の衛星から送信され、発射体上の1つまたは複数のアンテナで受信したGPS信号から取得することが可能である。1つまたは複数のGPS信号に対する妨害電波に遭遇する可能性がある場合は、対応する1つまたは複数のGPS信号妨害電波検出器が、各GPS信号を監視し、各信号が妨害電波を受けているかどうかを検出するために含まれてもよい。そのような妨害電波が検出されると、妨害電波対抗装置が、GPS信号保護対策を実施することになる。
【0011】
例示的実施形態では、GPS信号保護対策には、発射体に周期的動作、例えばローリングをさせる、あるいはさせたままの状態にすることと、この発射体の周期的動作を用いて(例えば、選択的かつ周期的に妨害電波を示すGPS信号を回避することによって)、妨害電波の影響を受けたGPS信号を検出して除外し、さらに妨害電波の影響を受けていない信号の確実な処理を可能にするという方法で、GPS信号を選択的にサンプリングすることとが含まれる。発射体が、その周期的動作の各周期(つまり、ローリングの各周期)を通過するに従い、1つまたは複数のアンテナそれぞれは、1つまたは複数の衛星それぞれからのGPS信号を受信するために、周期的に位置を合わせることに留意されたい。このように、少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能な状態でいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる(例えば、少なくとも一部のローリング姿勢にいる間は)。
【0012】
あるいは、発射体が回転していない場合などのように、発射体の動作によって、1つまたは複数のアンテナが、連続して妨害電波の影響を受けていないGPS信号を受信するように、正しい方位に向いた状態のままでいられるような場合は、例示的妨害電波保護対策は、1つまたは複数のアンテナが受信したGPS信号に妨害電波の影響がないかどうかを検出し、GPS受信機を、妨害電波の影響がない信号のみを使用するように切り替えることを含んでもよい。この例示的実施形態では、発射体は回転する必要もローリングする必要も無いことに留意されたい。従って、この保護対策は、ローリング安定ではない発射体で実施することが可能である。また、この実施形態によれば、アンテナは、スリップ・リングなどの機構によって、発射体の本体から分離しても良いことに留意されたい。従って、アンテナが、1つまたは複数の衛星に関して固定した方位に維持されている間は、この発射体は、回転またはローリング安定状態でよい。同様に、アンテナが、1つまたは複数の衛星に関して、周期的動作、例えば回転を受けている間は、発射体はその状態のままでよい。
【0013】
他の例示的保護対策としては、RF信号からデジタル信号へのGPS信号の変換と、自動利得制御の実施とを含むことが可能である。その実施形態の場合、各GPS信号は、受信直後または受信後かなり早いうちに、高速アナログ/デジタル変換器で変換することができる。なお、その変換したデジタルGPS信号は、デジタル処理で実現した自動利得制御回路を通過することができる。このアナログ/デジタル変換器と自動利得制御回路とは、ともにGPS無線受信機に実装することができる。
【発明を実施するための最良の形態】
【0014】
図1に、ジャイロ10が組込まれていない発射体誘導システムの例示的実施形態における主要構成部品を、発射体12の分解斜視図として示す。この発射体12は、砲台(図示せず)から発射された後の飛行中の状態で図示されている。
【0015】
また、この発射体は、直交座標系で示される。図4には、航空機と、それに対応する直交座標系とを示す。また、図4には、ロールφ、ピッチθ、およびヨーψの各回転角速度成分を、長手方向軸xb、ピッチ軸yb、およびヨー軸zbとともに定義する。さらに、図4には、局所的なレベルで固定された地球航行座標系も併せて示す。ワンダー角がゼロの時は、YN軸は経線に平行で、真北を指す。また、XN軸は、緯線に平行で、東を指し、ZN軸は、重力ベクトルとして地球の表面から伸びる。角αは、位置特異点と遭遇せずに地球の両極を横切るために、航行システムで用いられる。飛行中は、発射体の加速度や速度などの時間インデックス付きデータ要素の各成分は、通常の方向余弦行列を用いて、下付き文字「b」で表示される発射体の座標から、下付き文字「N」で表示される地球基準座標でのデータ要素に変換される。
【0016】
再び図1を参照すると、ジャイロなしの発射体誘導システムによって誘導される発射体には、3軸の加速度計14がある。この3軸の加速度計には、xb軸に沿って測定されたx軸加速度データを提供するx軸加速度計、yb軸に沿って測定されたy軸加速度データを提供するy軸加速度計、およびzb軸に沿って測定されたz軸加速度データを提供するz軸加速度計がある。ベルト16で表されるGPSアンテナとモジュール18で表されるGPS受信機とが組み合わされて、地球の基準航行座標系での、搭載したGPSの位置・高度データおよびGPSの速度データを提供する手段を表す。別のアンテナ・パターン88、89は、1つまたは複数の衛星78、79からのGPSデータを受信するように構成される。図には、アンテナ・パターン88、89およびアンテナ・ベルト16しか示していないが、任意の数のアンテナ、任意の構成のアンテナ、および/または任意の方位に向いたアンテナが発射体上には含まれてもよいことに留意されたい。ただし、この各アンテナは、異なる方向または一連の方向からくるGPS信号を受信するように構成され、その方位を定められる(例えば、各アンテナ・パターンには、それぞれ異なる方向あるいは一連の方向に向けられたローブ(突出部)がある)。同様に、ただ1つのGPS受信機18のみが図には示されているが、複数のGPS受信機を、発射体上に実装された特定の数の、特定の構成を有す、特定の方位に向いたアンテナを介して受信したGPS信号の処理に合うように実装しても良いことに留意されたい。
【0017】
モジュール20は、誘導用のプロセッサを示し、時間インデックス付きのGPS位置データおよびGPS速度データを記憶し、アクセスするために、また本明細書中で説明するようなGPS信号の保護対策を実現するために、さらにx、y、およびz軸加速度データを、発射体の座標系から航行座標系へと変換するためにコンピュータ、メモリ、およびプログラム手段という機能を提供する。この加速度データはアレイ化され、また、個の加速度データには、GPS位置データおよび速度データに対する時間インデックスと共通の時間インデックスがある。ロール・カウンタ22は、飛行中に、地球の磁場における発射体の回転角速度を表す交流信号を出力する。
【0018】
モジュール20上のコンピュータ、メモリ、およびプログラム手段は、プログラム中の繰り返される時間インデックスごとに、現在の位置データ、速度データ、および加速度データを、モジュール26で表される飛行制御・弾道データ・システムに与え、この発射体を所定の目標地点に誘導するのに用いるために、局所的なレベルの地球航行基準座標に関して、対応する時間インデックス付きの加速度データ、GPS速度データ、および位置データを受信して応答し、対応する発射体のロール角、ピッチ角、およびヨー角の時間インデックス付き推定値を計算して出力する。
【0019】
この飛行制御・弾道データ・システムは、先尾翼28、30などの操縦翼面に指令を与え、発射体を目標地点までの軌道上に維持することによってこの発射体を制御する。カードまたはモジュール26で表される飛行制御・弾道データ・システムの選択および/または設計は、設計上の選択であり、本発明の主題ではない。いずれにせよ、この発射体が、例えば、ローリング(横揺れ)などの周期的な動きを行っている場合は、操縦翼面の方位が、この発射体の所望の進行方向と一致するのを待つことによって、軌道修正を行うことができると本発明では規定する。
【0020】
また、本発明は、軌道修正が大きく、発射体の誘導部分がローリング安定である場合は、この発射体は、回転を停止することができ、ローリング安定化モードに入っているときに修正を行うことができることも企図している。そして、修正が完了すると、この発射体は、ローリング状態の発射体に復帰することができる。本発明は、発射体のローリング方位を決定する方法を備えることによって、このような機能を可能にする。例えば、図3cを参照すると、発射体のローリング方位は、(1)回転ジャイロ、(2)GPS衛星が回転をオン・オフする時のローリング位置、(3)複数のアンテナを用いたGPSによる姿勢決定、および(4)磁気スピン・カウンタを介して決定することができる。
【0021】
例示的実施形態では、 GPS信号データは、1つまたは複数の衛星78、79から送信されたGPS信号から得ることができ、発射体上の1つまたは複数のアンテナ88、89で受信する。さらに、図3cを参照すると、例示的実施形態では、複数のGPSアンテナ・パターン88、89は、GPS信号を受信し、その信号は、次にRF処理手段98、99を通過してRF処理が施されたGPS信号3344を生成する。高速相関器3354からの情報と、参照ローリング・データ3364が、RF処理が施されたGPS信号3344とともにプロセッサ3374に送信される。この信号3344、3354、3364に基づいて、プロセッサ3374は、位置信号3381、速度信号3382、および姿勢信号3383を生成する。
【0022】
図3dに示すように、各GPS信号3407は、無線受信機3427が受信する前に、低雑音増幅器3417を通過しても良い。また、例示的実施形態では、1つまたは複数のGPS信号妨害電波検出器3418が、各GPS信号3407を監視し、その各GPS信号が妨害電波に曝されていないかどうかを検出するために含まれてもよい。そのような妨害電波が検出されると、妨害電波対抗装置3419が、GPS信号保護対策を実施する。この保護対策としては、例えば、選択的かつ周期的に妨害電波を示すGPS信号を、発射体のアンテナ部の周期的動作によって回避する方法もある。図3dに示すように、妨害電波検出器3418と妨害電波対抗装置3419は、信号をシステム・プロセッサ3457に送信する。このシステム・プロセッサは、同時に、参照ローリング・データ3467とGPS受信機3437からの情報も受信する。システム・プロセッサ3457から受信した信号に基づき、デジタル・フィルタ3427は、GPS信号を無線受信機3427から受信し、このGPS信号の妨害電波の影響を受けていない部分を選択的にGPS受信機3437に送信する。GPS受信機3437は、次に、事前に記憶しておいたデータ3447を用い、GPS信号を処理し、システム・プロセッサ3457に送信する。最後に、システム・プロセッサ3457は、参照ローリング・データ3467とGPS信号とを利用して、自動操縦装置3477に信号を送信し、操縦翼面3487を動かし、それによって発射体を目標に誘導する。
【0023】
例示的実施形態では、GPS信号保護対策には、発射体に周期的動作(例えば、回転、ローリング、あるいは振動)をさせる、あるいはさせたままの状態にすることと、この発射体の周期的動作を用いて、妨害電波の影響を受けたGPS信号を検出して除外し、さらに妨害電波の影響を受けていない信号の確実な処理を可能にするという方法で、GPS信号を選択的にサンプリングすることとが含まれる。発射体が、その周期的動作の各周期を通過(つまり、ローリングまたは回転、振動、あるいは他の周期的動作の各周期を通過)するに従い、1つまたは複数のアンテナ88、89それぞれは、1つまたは複数の衛星78、79それぞれからのGPS信号を受信するために、周期的に位置を合わせることに留意されたい。このように、少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能なままでいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる(例えば、少なくとも一部のローリング姿勢にいる間は)。
【0024】
図8に、3種類の時間依存性を持つGPS信号の典型例を示す。この信号は、例えば回転などの周期的動作を受けている発射体上に実装された、それぞれ対応するGPSアンテナと受信手段とにより受信されたものである。図8に示すように、第1のGPS信号は、発射体が約30度から約210度までの方位で回転するときに妨害電波を示す。同様に、第2のGPS信号は、発射体が約120度から約360度までの方位で回転するときに妨害電波を示す。さらに、第3のGPS信号は、発射体が約360度から約30度までの方位で回転するときに妨害電波を示す。従って、実質的に連続した妨害電波の影響を受けていないGPS信号は、第1のアンテナを、発射体が約210度と約30度の間で回転するときにスイッチをオンにし、第2のアンテナを、発射体が約360度と約120度の間で回転するときにスイッチをオンにし、第3のアンテナを、発射体が約30度と約360度の間で回転するときにスイッチをオンにし、第1のアンテナを、発射体が約30度と約210度の間で回転するときにスイッチをオフにし、第2のアンテナを、発射体が約120度と約360度の間で回転するときにスイッチをオフにし、第3のアンテナを、発射体が約360度と約30度の間で回転するときにスイッチをオフにすることにより受信することが可能となる。
【0025】
さらに、図1の一実施形態では、飛行制御・弾道データ・システム26は、ジャイロ無しの発射体誘導システム12からバス32を介して提供された情報を用いるために、あるいは、発射後、発射体の回転を止め、発射体の先端を空の方に向けて大雑把に位置合わせをするために、あるいは、GPS信号の受信を最適化するために、アンテナ・パターン88、89を正しい方位に合わせるために事前にプログラミングされる。この実施形態によれば、発射体の回転が止まると、加速度計が取り出されて始動する。コンピュータ、メモリ、およびプログラム手段は、次に、この移動体の角速度推定値を含む状態行列の最初の推定と更新とを行う。この例示的実施形態によれば、発射体の動作によって、1つまたは複数のアンテナ88、89が、連続して妨害電波の影響を受けていないGPS信号を受信するように、正しい方位に向いた状態のままでいられるような場合、妨害電波対抗装置3419は、1つまたは複数のアンテナが受信したGPS信号3407には、妨害電波の影響がないということを検出し、1つまたは複数のGPS受信機18を、妨害電波の影響がない信号のみを使用するように切り替える、あるいは使用させることができる。この例示的実施形態では、妨害電波の影響を受けていないGPS信号は、発射体がローリングしなくても受信できることに留意されたい。このことを実現するためには、コンピュータに実装された処理は、1つまたは複数のアンテナが、妨害電波の影響を受けていないGPS信号を実質的に連続して受信するように、GPSアンテナの方位と受信手段とを発射体が維持するような誘導プログラムとして実施すればよい。
【0026】
この例示的実施形態では、発射体は回転する必要もローリングする必要も無いことに留意されたい。従って、この保護対策は、ローリング安定ではない発射体で実施することが可能である。また、この実施形態によれば、アンテナは、スリップ・リングなどの機構によって、発射体の本体から分離しても良いことに留意されたい。従って、アンテナが、1つまたは複数の衛星に関して固定した方位に維持されている間は、この発射体は、回転またはローリング安定状態でよい。同様に、アンテナが、1つまたは複数の衛星に関して、周期的動作、例えば回転を受けている間は、発射体はその状態のままでよい。
【0027】
このように、本発明によれば、発射体は、例えば、発射体の本体から、スリップ・リングを用いてアンテナを分離することによって、回転またはローリング安定状態でもよい。妨害電波の影響を受けていないGPS信号を、実質的に連続して受信しない場合は、妨害電波対抗手段は、発射体が、周期的動作に入り、選択的にかつ周期的に妨害電波を示すGPS信号を回避するように構成すればよい。
【0028】
他の例示的保護対策としては、RF信号からデジタル信号へのGPS信号の即時変換と、自動利得制御の実施とを含むことが可能である。その実施形態の場合、各GPS信号は、受信直後または受信後かなり早いうちに、高速アナログ/デジタル変換器で変換することができる。そして、そのデジタルGPS信号は、デジタル処理で実現した自動利得制御回路を通過する。このアナログ/デジタル変換器と自動利得制御回路とは、ともにGPS無線受信機に実装することができる。
【0029】
例示的実施形態では、このシステムは、発射前に初期化するように構成することが可能である。この実施形態によれば、発射体の発射に先立って、システムは、どの衛星が、この発射体の軌道全体にわたって各アンテナ・パターン88、89の視野(FOV)内に入るであろうか、また衛星78、79のどの組合せなら、この軌道の最高のGDOPを与えるのかを判定し、メモリに記憶することができる。この情報が、入手可能な他の補正データとともに受信機18に事前に記憶される。
【0030】
図3dに示すように、例示的実施形態では、GPS信号3407は、低雑音増幅器3417を経由して、高速アナログ/デジタル変換器(例えば、毎秒5ギガビットで14ビットの分解能を有すアナログ/デジタル変換器)を備えることが可能な無線受信機3427に送信される。無線受信機3427もまた、デジタル処理で実施した自動利得制御回路を備えることができる。信号は、次に、一組のデジタル・フィルタ3427と、1つまたは複数の妨害電波検出器3418とに送信される。個々のフィルタ3427は、TOA計算で用いる予定の事前に選択した各衛星に対して実装することができることに留意されたい。また、デジタル・フィルタ3427は、事前に選択した各衛星の周波数帯域が通過するように、リアルタイムで動的に調整することができることに留意されたい。この通過帯域の中心は、発射体と衛星との間のドップラー運動に対して調整されたGPS搬送周波数である。次に、GPS信号は、GPS受信機3437に送信され、そこで、高速デジタル相関器3447と、決定した位置および速度とを用いて、事前に選択した各衛星の既知のコードに対して相互に関連付けられる。
【0031】
この移動体がローリングをしている場合は、加速度計の交流信号を、直流信号あるいは定常状態信号から分離することによって角速度情報が抽出される。この発射体はローリングしているので、ピッチおよびヨー加速度計からの出力信号は、正弦波関数として変化することになる。この移動体がローリングしていない場合は、データは本体の座標系から抽出され、必要に応じて、DCM(方向余弦行列)関係を用いて地球の基準航行座標系へと移される。
【0032】
図2に、目標に向かって発射体を発射する移動抱兵器を示す。図に示す方程式
は、計算した発射体の真の位置を時間の関数として表すベクトル量である。
は、理想的な軌道上の、発射体の理想的な位置を表すベクトルである。
は、発射前の時間ゼロにおける発射体の位置に関する誤差を表すベクトルである。
は、航法計器の誤差およびGPS誤差に由来する累積的誤差による発射体の位置に関する誤差を表すベクトルである。この図は、一連の事象を示し、TARGET ERRORと示す楕円に帰着する破線によって誤差量の領域を概略的に示す。この誤差は、誘導手段を搭載していない火砲に対する通常のやり方で、発射体を発射することによって生じ得るものである。実線のじょうご状の領域は、次第に減少し、誘導手段が搭載されていない場合の軌道に対するTARGET ERRORよりもかなり小さな極限に漸近的に近づく搭載GPSの位置に関する誤差を概略的に示す。本発明のジャイロ10を持たない発射体誘導システムは、3台で一組の加速器を用い、リアルタイムの本体参照データをコンピュータ、メモリ、およびプログラム手段に提供し、また、発射体の姿勢を定め、また姿勢データを出力するために、GPSからのリアルタイムの位置データを提供する。この出力はカルマン・フィルタを通過し、じょうご状領域によって囲まれた領域内に、発射体の方向を定めるために用いる支援用GPS位置データとともに、図1のモジュール26で表される飛行制御・弾道データ・システムと結び付けて用いられる。
【0033】
図3aおよび3bに、ジャイロ10を利用しない発射体誘導システムが用いるデータ・フローの実施形態を示す。2点鎖線で囲まれたブロック300は、発射制御・弾道用コンピュータが提供する機能を表し、このコンピュータは、初期化プログラムを実行し、データ・ソースから受信したデータを処理する。このデータ・ソースには、TARGET LOCATION(目標位置)、この発射体を発射する兵器の地理的位置、PROJECTILE TYPE(発射体のタイプ)、PITCH ALIGNMENT IN BARREL(発射管でのピッチ・アライメント)、発射管のピッチ角、発射体座標系における3軸3成分の加速度ax、ay、az304の出力、ロール角(ROLLφ)、およびスピン・カウンタ308からのロール角速度(ROLL RATEφ)などがある。FIRE CONTROL AND BALLISTICS(発射制御・弾道用)コンピュータは、入手可能なデータを処理し、発射前に、初期方位角、発射体本体の固定角速度、現在の位置、および初期速度成分などの初期状態のデータを転送する。スピン・カウンタ308および3軸加速度計304は、そのデータを、それぞれ信号経路314と333とを介して、直接、INITIAL PROJECTILE STATE ESTIMATE(発射体の初期状態推定)機能312に与える。すべての初期条件は、FIRE CONTROL AND BALLISTICS機能302などの外部ソースから、電気、磁気、または光リンク、あるいは場合によっては機械リンクを介して発射体に入力される可能性が高い。もし、発射台が船舶上に搭載予定だった場合は、初期条件は、発射台が受信する初期条件を送信したステーションに対するこの船舶の速度、向き、船舶の慣性誘導用コンピュータからの変位、および、おそらく発射台の座標も含むように拡張されていたであろう。
【0034】
FIRE CONTROL AND BALLISTICS機能302は、ゼロ基準を設けるためにロール・インデックス付与情報をスピン・カウンタ308にも提供する。このスピン・カウンタ308は、ロール角φbの推定値を、ロール角速度φbと同様に2〜3度の精度で提供する。FIRE CONTROL AND BALLISTICS機能302は、予測弾道軌道を事前計算し、この結果も発射体に送る。加速度計の情報とともに、この弾道情報、あるいはFIRE CONTROL AND BALLISTICS機能302からの直接データが用いられ、推定処理の初期化時点で、初期状態ベクトルと発射体の姿勢とを決定する。加速度計のデータとGPSのデータとが状態推定に利用できる場合は、アルゴリズムは初期化される。FIRE CONTROL AND BALLISTICS機能302は、適合テストの失敗の結果を受けて、ESTIMATION OF NEW INITIAL TARGET STATE(目標の新たな初期状態の推定)機能322から、信号経路320を介して、発射体の方位と位置とに関する一組の初期状態も受信する。
【0035】
FIRE CONTROL AND BALLISTICS機能302は、一組の初期のSTATE ESTIMATE(状態推定値)を、INITIAL PROJECTILE STATE ESTIMATE機能ブロック312に出力し、この機能ブロック312は、次に、初期のBODY STATE ESTIMATES(本体状態推定値)
、
を、信号経路324を介してSMOOTHING PROCESS(スムージング処理)機能ブロック344に転送し、一組のATTITUDE STATE ESTIMATES(姿勢状態推定値)を、信号経路330を介してATTIDUDE FILE(姿勢ファイル)332にある初期姿勢角度アレイの初期状態推定機能に転送する。
【0036】
回転カウント・データをFIRE CONTROL AND BALLISTICS機能302に提供した回転カウンタまたはSPIN COUNTER(スピン・カウンタ)308は、回転カウント・データを、信号線333を介してINITIAL PROJECTILE STATE ESTIMATE機能ブロック312と、図3bで機能ブロック350として表されている時間インデックス付きSPIN COUNTER MEASURED DATA(スピン・カウンタ測定データ)用メモリ・アレイとにも提供する。そして、このメモリ・アレイ350で、発射体の全ロール角φ(n)が蓄積され、また時間インデックスを付与され、次に、経路351を介してATTITUDE ESTIMATION ALGORITHM(姿勢推定アルゴリズム)372に転送される。スピン・カウンタ技術は、成熟した技術である。アライアント・テックシステムズ(Alliant Techsystems)社は、20mmの発射体に適合するのに十分小さなカウンタを開発したと伝えられる。従って、直径が大きな発射体用の回転カウンタは、本発明のシステムおよび方法に使用するために、容易に購入することができる製品である。回転カウンタの出力は、発射体が地球の磁場の中を回転するので、正弦波出力である。
【0037】
発射体のINITIAL PROJECTILE STATE ESTIMATE機能ブロック312は、アジマス角ψ0、ピッチ角θ0、およびロール角φ0に対する初期のATTITUDE STATE ESTIMATE値を、図3bに示すATTITUDE FILE332に初期値として提供する。
【0038】
本体の座標系における加速度の3軸3成分ax、ay、azの出力は、ブロック336で示される機能によって処理され、本体基準の時間インデックス付き速度変化を、信号経路338を介してACCEL DATA FILE(アクセル・データ・ファイル)用メモリ・アレイ340に転送する。このACCEL DATA FILE用メモリ・アレイ340は、一連の時間インデックス付き加速度データ要素を、SMOOTHING PROCESS機能ブロック344に送信する。
【0039】
ブロック344でのフィルタリングおよびスムージング処理については、図6、7a、および7bに関連して、本明細書の後半で説明する。このスムージング処理は、姿勢、速度、および位置の初期値を、加速度計の現在のデータと併せて用い、本体座標系における発射体の速度と位置とを決定する。スムージング処理での出力は、位置と速度に対するSTATE VECTOR ESTIMATES(状態ベクトルの推定値)
、
であり、信号経路346を介して、BODY TO INERTIAL TRANSFORMATION(本体から慣性への変換)機能ブロック348に送信される。
【0040】
GPS MEASURED DATA(GPS測定データ)機能ブロック356は、周期的に、時間インデックス付き速度データ
と位置データ
とを受信し、このデータを、信号経路358を介して機能ブロック360として示すコンピュータ、メモリ、およびプログラム手段の時間インデックス付きアレイに転送する。このGPS速度データと位置データとは、信号経路362を介して機能ブロック364によって示されるカルマン・フィルタに転送される。このカルマン・フィルタは、発射体の現在の推定位置ベクトルおよび推定速度ベクトルのフィルタリングした値を、信号経路368を介してFIT ERROR TEST(適合誤差試験)機能ブロックとATTITUDE ESTIMATION ALGORITHM機能ブロック372とに転送する。ATTITUDE FILE332は、時間インデックス付き推定姿勢角度データと推定姿勢角速度データとを、信号経路374を介してATTITUDE ESTIMATION ALGORITHM機能ブロック372に、また転送経路378を介してBALLISTIC ESTIMATES(弾道推定)(n)機能ブロック376に、地球の基準航行座標系において転送する。BALLISTICS ESTIMATESは、経路375を介して、補正済みの初期位置および初期速度に関する情報を備えた発射体の既知のモデル特性を用い、また、経路378を介して、過去の姿勢および姿勢速度すべての履歴とを用い、モデル化した現在の位置と速度の推定値を、経路382を介してATTITUDE ESTIMATION ALGORITHM372に提供する。
【0041】
本体の直交座標系におけるフィルタリングした本体のSTATE VECTOR ESTIMATES
、
ベクトルは、信号経路346を介してBODY TO INERTIAL TRANSFORMATIONブロック348に転送される。このBODY TO INERTIAL TRANSFORMATIONブロック348は、推定した姿勢角および姿勢角速度を、信号経路384および386を介して受信し、STATE VECTOR ESTIMATESを、本体の直交座標系での表示から地球の基準航行座標系でのベクトルへ、さらに地球の基準航行座標系での位置および速度推定値へと、通常の方向余弦変換を用いて処理する。この通常の方向余弦変換は、例えば、George Siourisの教科書「Aerospace Avionics Systems, A Modern Synthesis」(アカデミック・プレス(Academic Press)社、1993年出版)に説明されるような変換である。この推定処理は、測定した回転カウンタのデータを用いて、また新しい弾道軌道を、新しい初期状態情報に基づき計算することによって簡略化することができ、また改善することができる。
【0042】
BODY TO INERTIAL TRANSFORMATION機能ブロック348は、地球の基準航行座標系での推定した位置と速度STATE VECTOR ESTIMATESを、経路388を介してFIT ERROR TEST機能ブロック370に出力し、そこで、STATE VECTOR ESTIMATESは、カルマン・フィルタを通過したGPSの位置および速度と比較される。統計的な意味では、GPSの位置およびGPSに付随する誤差以上に推定処理を適合させるのは、可能ではない。2つの状態ベクトル間の相違に対する誤差が、GPS誤差の1〜2倍よりも小さければ、アルゴリズムは、この適合処理は「統計的に十分良い」ので終了できると宣言し、新しい測定データが到着するのを待つ。テストを通過すれば、位置、速度、姿勢、および姿勢角速度の推定値は、推定した位置と姿勢の時間インデックス付きメモリ・アレイ中の(n−1)の位置を更新するのに用いられる。
【0043】
テストに失敗すると、アルゴリズムは、一組の新しい発射体の初期状態を、摂動アルゴリズムを用いて推定し、解が所定の適合誤差の閾値範囲内にある極限に収束するまで、推定処理を再度繰り返す。さらに、テストに失敗すると、FAIL信号が、経路390を介し、ESTIMATION OF NEW INITIAL TARGET STATE機能ブロック322に送信され、そこで、初期の位置、速度、姿勢、および姿勢角速度が調整され、一組の修正した推定状態データが、信号経路320を介して、追加サイクルのためにINITIAL PROJECTILE STATE ESTIMATE機能ブロック312に送信される。繰り返しは、機能ブロック370からPASS信号が出るように、初期条件が調整されるまで続き、PASS信号の後には、1秒後にGPSデータを用いた次のデータの繰り返しが始まる。
【0044】
前に説明したように、GPSおよびGPS信号の保護に対する過度の信頼を避けるために、高性能慣性計測器(例えば、100マイクロgよりも良い水準で実行する慣性計測器)を用いても良い。ハネウエル(Honeywell)社のVBA加速度計、およびWoodland Hills、California 916637にあるノースロップ・グラマン社(Northrop Grumman Inc.リットン社の譲受人)のリットン社ガイダンス&コントロールシステム部門(Litton Guidance & Control Systems Div.)が供給するSilicon Accelerometer(シリコン加速度計)とには、そのような機能がある。
【0045】
アライアント・テックシステムズ社のGPS受信機は、本発明のシステムおよび方法において利用可能である。このアライアント社のGPSは、十分な処理能力があり、ユーザのソフトウェアを記憶するのに用いることができる別個のメモリがあるタイプ509プロセッサと、この用途向けのシステム・プロセッサとを用いる。また、このアライアント社の受信機は、発射体がローリングする際に、GPS信号を保護する手段としての複数のアンテナ入力を収容する複数のRFフロントエンドで構成される。GPSの509プロセッサは、データを処理し、慣性データを、GPSデータおよび回転カウンタのデータと統合するのに用いることもできる。ソフトウェアは、509プロセッサに組み込み、角速度情報を3軸加速度計から抽出し、センサからのデータと統合することができる。
【0046】
あるいは、コストを引き下げなければならない場合は、発射後のGPS信号データに大きく信頼を置くことによって、より精度の低い加速度計を用いることができる。上記のように、例示的実施形態では、GPS信号データは、1つまたは複数の衛星78、79から送信され、発射体上の1つまたは複数のアンテナ88、89で受信されるGPS信号から取得することができる。1つまたは複数のGPS信号妨害電波検出器3418は、各GPS信号3407を監視し、各GPS信号3407が妨害電波の影響を受けているかどうかを検出するために含まれてもよい。この妨害電波が検出されると、妨害電波対抗装置3419は、システム・プロセッサ3457にあるGPS信号保護対策を実施することができる。
【0047】
例えば、妨害電波対抗装置3419によって、システム・プロセッサ3457は、発射体にローリングや回転などの周期的動作をさせる、あるいは発射体を周期的動作状態のままにすることができる。発射体が、その周期的動作の各周期を通過、つまり、ローリングの各周期を通過するに従い、1つまたは複数のアンテナ88、89それぞれは、1つまたは複数の衛星78、79それぞれからのGPS信号を受信するように、周期的に位置を合わせることができる。このように、衛星からの少なくとも1つのGPS信号が、1つまたは複数のアンテナによって、妨害電波の影響を受けていない状態で、受信可能なままでいる限り、その1つまたは複数のアンテナそれぞれは、周期的に妨害電波がない状態になる。例えば、少なくとも一部のローリング姿勢にいる間などである。
【0048】
あるいは、妨害電波検出器3418が、1つまたは複数のGPS信号中に妨害電波を検出しない場合は、妨害電波対抗装置3419によって、システム・プロセッサ3457は、発射体の回転を止め、この発射体の先端を空の方に向けて大雑把に位置合わせをするように、あるいは、GPS信号3407の受信を最適化するために、アンテナ・パターン88、89を正しい方位に合わせるようにできる。この実施形態によれば、発射体の回転が止まると、加速度計が取り出されて始動する。コンピュータ、メモリ、およびプログラム手段は、次に、この移動体の角速度推定値を含む状態行列の最初の推定と更新とを行う。この例示的実施形態によれば、妨害電波対抗装置3419は、1つまたは複数のGPS受信機18またはシステム・プロセッサ3457を、1つまたは複数のアンテナによって受信された妨害電波の影響がない信号のみを使用するように切り替える、あるいは使用することができる。
【0049】
誘導された発射体のロール角は、通常は、ジャイロまたはジャイロ・プラットフォームによって与えられる。この発射体のロール角を特徴付けるロール角信号は、飛行制御システムが、必要に応じて左または右に発射体をローリングさせるために先尾翼などの飛行操縦翼面の駆動と、目標に向いた1方向に発射体の向きを変えるために揚力面からの揚力の利用とを可能にするために必要である。本開示の目的は、ジャイロからの信号を用いずに、3軸加速度計からの出力と、GPSからの位置およびと速度信号とを用いることで発射体のロール角を発生させるための数学的方法、つまりコンピュータ・プログラミングが可能な方法を提供することである。
【0050】
ここでの技術的説明には、以下の表記法を使用する。
は、特定の基準座標系を持たずに分解したベクトルを表す。
は、本体座標系または発射体座標系と呼ぶ座標系で分解したベクトルを表す。この本体座標系を含み、本明細書で説明に用いるすべての座標系は、前方または正の「xb」軸方向、右手または正の「yb」軸方向、および下向きまたは正の「zb」軸方向に伸びる直交する3軸を形成するために、重心、あるいは基準点「ゼロ」と指定された基点などの発射体本体のある位置から伸びるx軸、y軸、およびz軸を備えた右手系の直交座標系である。少なくとも2台の加速度計が、yb軸とzb軸とに沿って本体座標系に固定され、配列される。b座標系のこれらの主軸は、慣性センサの入力軸と一致し、起点「O」で交差する。重要な第2の座標系は、主軸X、Y、およびZを備えた地理的または地球の基準航行座標系であり、これらの主軸は、図4の下部に示すように東、北、および上(Up)方向と一致する。
【0051】
ベクトルの下付き文字は、ベクトルの特有の性質または帰属を示すのに用いられる。行列は大文字で指定される。
は、方向余弦行列(DCM)であり、ベクトルを、N座標系または航行座標系から本体座標系へと変換する。つまり、
である。量の時間依存性は、時間変数または時間インデックスを丸括弧で囲んで表される。例えば、
は、時間t1での航行座標系から本体座標系への変換に対するDCMである。
DCMの転置は、
を与え、これは、時間t1での本体座標系から航行座標系への変換に対するDCMである。
【0052】
変数の増加分は、記号Δで示される。例えば、
は、所定の時間間隔に対するベクトル
の増加分を表す。変数の誤差は、記号
で示される。例えば、
は、ベクトル
の誤差を表す。記号=は、近似的に、あるいは実質的に等しいことを表す。
【0053】
センサと方位
【0054】
2台の加速度計の構成では、第1の加速度計は、本体の右側から外向きに伸びるyb本体軸に沿って加速度を感知するように位置合わせをされる。第2の加速度計は、ヨー軸を形成する基点から下向きに伸びるzb本体軸に沿って加速度を感知するように位置合わせをされる。ロール変数の計算には不要である第3の加速度計は、xb軸あるいは前方軸に沿って加速度を感知するように位置合わせをされる。
【0055】
ロール角の計算
【0056】
加速度計の出力は、本体座標系から航行座標系の値に、次の方程式に従って変換される。
【数1a】
【0057】
ここで、この手順において、固定航行座標系または地球基準の東(X)、北(Y)および上(Z)に沿った成分からなる航行座標系での移動体の加速度要素として加速度ベクトルANを得るために、Abは本体座標系での加速度ベクトルを表し、括弧付きのH、P、およびR演算子{H}T、{P}T、および{R}Tは、移動体または発射体の固定座標系におけるzb軸に関する飛行方向またはヨー、yb軸に関するピッチ、およびxbに関するロールに対して、本体座標系から航行座標系への正回転のDCM変換の転置を表す。
【0058】
DCMである{T}は、ユニタリ行列を表し、本体の基準加速度データを、北、東、および下という座標系から、東、北、および上という座標系に変換し、次のように定義される。
【数1b】
【0059】
発射体上の3軸加速度計からの加速度のデータ要素Abは、航行座標における速度変化を求めるために、次の方程式を用いて、例えば1秒といった所定増分の時間間隔にわたって積分される。
【数2】
【0060】
この加速度計のデータに基づく速度変化の各計算と同時に、GPSデータが速度変化の計算に用いられる。このGPSデータは、既に、航行座標系である。この計算には、次の方程式が用いられる。
【数3】
【0061】
次の方程式を用いて、本体座標系から航行座標系への変換と共に、本体の加速度計からのデータに対して二重積分が実行され、本体座標系から変換された加速度計のデータに基づき、位置の変化を得る。
【数4】
【0062】
加速度計のデータに基づく位置変化ΔPNの各計算と共に、GPSデータは、実質的に等しいGPSの位置変化ΔPGPSについての次の方程式を用いた計算に用いられる。
【数5】
【0063】
群方程式
【0064】
DCM行列とその転置行列との積が単位行列に等しい。従って、
【数6a】
【数6b】
【0065】
方程式3から、GPSデータからの速度成分または加速度成分の変化を、次のように、加速度計のデータからの速度成分の変化に関係付けることが可能である。
【数7a】
【0066】
方程式5から、GPSデータからの位置成分または加速度成分の変化を、次のように、加速度計のデータからの位置成分の変化に関係付けることが可能である。
【数7b】
【0067】
ピッチDCM、方向DCM、およびユニタリ変換DCMを、グループ化、または乗算して1つのDCM、すなわち{Q}を作り、簡単にするために時間の増分を1秒とすると(但し、当然のことながら、式ではあらゆる時間の増分を用いることができる)、
【数8a】
[数8b]
ΔT=1秒、およびΔ2=1秒の2乗=1
【0068】
式7aのΔTに1を代入し、式7bのΔT2に1を代入し、式7aと7bの両辺にユニタリの転置を掛けると、方向DCMとピッチDCMは、その順序で次の方程式を与える。
【数9a】
【数9b】
【0069】
CPをCosθとし、SPをSinθ、CHをCosψ、SHをSinψ、CRをCosφ、およびSRをSinφとして用いると、本体座標系から航行座標系への回転変換に対する6種類のDCMは、次のようになる。
【数10a】
【数10b】
【数10c】
【0070】
本体が、発射台から発射された発射体の場合は、ピッチ角は発射時の発射管の角であり、方向は、発射時に発射管が真北となす角ψである。どちらも、このシステムの初期化の時点からあり、時間に対する通常の軌道に近接していると期待される。従って、表面上は既知である。
【0071】
{Q}の要素は、式8a、10a、および10bからわかり、ゆっくり変化すると考えられる。そこで、{Q}を次のようにおく。
【数11】
【0072】
式9aと9bとを書き直し、{Q}を、ΔT=1秒およびΔT2=1秒という条件で{P}{H}{T}の結果に代入すると、次の式が得られる。
【数12a】
【数12b】
【0073】
左辺と右辺とを入れ替えると、
【数13a】
【数13b】
【0074】
ロールDCMは、式10cで表され、加速度計のデータはベクトルであるので、
【数10d】
であり、
【数14】
である。ここで、
、
、および
は、本体の各軸に沿った単位ベクトルである。
【0075】
式13aと13bとは、次のように書き直される。
【数15a】
【数15b】
【0076】
加速度計のデータの増加分と、GPSからの速度データの増加分とが、固定航行座標系で利用可能となり、次に示す2つの3要素ベクトルを作る。
【数16a】
【数16b】
ここで、
、
、および
は、東、北、および上という座標系の基本単位ベクトルである。
【0077】
式15aおよび15bにおける{Q}に対する行列を、式16aおよび16bと掛けると、
【数17a】
【数17b】
を得る。
【0078】
式17aおよび17bの左辺を3×1行列と掛けると、左辺は、
【数18a】
【数18b】
となる。
【0079】
式18aと18bの左辺にあるベクトルの最初の要素a1は、移動体の長手方向軸まわりの加速度を落とすことを表すので、a1には各ロール成分はない。従って、それは削除し、2番目と3番目の行の表式を残す。すると、式18aおよび18bより、
【数19a】
【数19b】
【0080】
式19aおよび19bの左辺は、2×2行列と2×1行列との積に書き直すことができる。
【数20a】
【数20b】
【0081】
式20aと20bとを一緒にすると、
【数20c】
【0082】
ロール角の計算は、次の定義を用いる。
【数20d】
これが、加速度計係数行列である。
【数20e】
これが、ピッチ/方向係数行列である。
【数20f】
これが、GPS情報ベクトルである。
【数20g】
これが、未知のロール量である。式20cを書き直すと、
【数21】
【0083】
a1行列は、4×2行列である。
は、2×1ベクトルである。式21は、2つの未知数(CR、SR)に関する4つの方程式を表すことを考え、式21を
について解く。式21の両辺にa1Ta1を掛けると、
【数22a】
a1Ta1積の逆行列を左から掛けると、
【数22b】
従って、
【数23a】
なので、ロール角は、
【数23b】
となる。
【0084】
この手順は、その後、次のサンプリング時間に対して、以下のように過剰決定システムを再び解く。t=t2のときは、2つの未知数(cosR、sinR)を持つ8個の方程式があり、t=tnのときは、2つの未知数(cosR、sinR)を持つ4n個の方程式がある。
【0085】
反復計算解は、次のように方程式を重ねることによって得られる(t=t2の場合)。
【数24】
ここで、a1、β1、およびω1は、上記に規定される。新しい変数a2、β2、およびω2は、t=t2のときの値であることを除けばa1、β1、およびω1と同じ構造である。また、
は、2つのサンプリング時間にわたる変数を用いて、cosRとsinRの値を表す。t=t2での解は、このため、前と同様に、次のように求まる。
【数25】
【数26】
【0086】
同様に、n個のデータ・サンプルに対して、t=tnで、
【数27】
【数28】
【0087】
一般的な発射体または移動体に対しては、ピッチおよび方向係数行列に対するデータも必要である。方向とピッチ(ジャイロ無しの場合)は対地軌道(arctan Vn/Ve)から近似でき、ピッチは飛行経路角(垂直速度または高度の変化率の逆正接関数、およびΔP(北)とΔP(東)とから決定する対地速度)から近似できる。大雑把な方向は、ハネウエル社から入手可能な磁気コンパスまたは固体磁気コンパスで分かる。上層風が分かっていれば、方向を補正するのにその風を利用してもよく、迎え角が分かっていれば、それをピッチ角の補正に利用すればよい。
【0088】
図5は、ロール角の計算に必要な処理機能の概要を示すブロック図である。POSITIONサンプラ502およびVELOCITYサンプラ504を介して、POSITIONデータおよびVELOCITYデータを与える内部コンピュータを備えたGPS RECEIVER(GPS受信機)を表すブロック500を示す。各サンプラには、それぞれサンプラ遅延(装置)506、508がある。このサンプラからの出力は、ΔPOTISIONおよびΔVELOCITYであり、このデータが、ROLL ESTIMATE(反復計算解)機能ブロック510に送信される。ACCELEROMETERS(加速度計)ブロック512は、上記で説明したBODY AXES(本体座標軸)に位置合わせされた3軸加速度計を表す。加速度成分axは、図に示すように、発射体の長手方向軸に位置合わせされる。この加速度成分axは、飛行中は、ある瞬間から次の瞬間へと非常にゆっくりと変化する。図1に示すように、加速度成分ayは、軌道を横切る方向の加速度であり、加速度成分azは、上方向軸に沿った加速度成分である。PITCH HEADING COEFFICIENT MATRIX (ピッチおよび方向係数行列)514は、加速度データayとazとで初期化される。このデータの処理は、三角法の値に対して、現在のPITCH ESTIMATE(ピッチ推定値)およびHEADING ESTIMATE(方向推定値)を用いる。入力ΔTには、ある瞬間に好適な値があることが示されることになる。PITCH HEADING COEFFICIENT MATRIXは、GPSからのΔPOSITIONおよびΔVELOCITY入力とともに、ROLL ESTIMATE(ロール角推定)機能ブロック510によって用いられ、ロール角φを、図1のブロック26を含むFLIGHT CONTROLブロック516に出力する。
【0089】
スムージング
【0090】
ここで、図3aのブロック344で示されるスムージング処理を、図6、7aおよび7bの説明と関連付けて説明する。本発明の加速度計とGPS受信機とを備えた発射体誘導システムは、この発射体の飛行全体にわたって、発射から現在の位置までの過去の軌道についてのスムージングした推定値を、姿勢角とともに図1と5とに示したFLIGHT CONTROLブロック26に出力し、この飛行制御機能26が、既知の目標地点に対する発射体の方向または対地軌道を調整する。
【0091】
図6にフォワード・スムーザの実施形態を示す。この実施形態は、カルマン・フィルタを用いる。図3bのブロック364で示すカルマン・フィルタは、時間t1、t2、・・・tnでn個の測定値{y1、y2、・・・yn}があるフィルタである。
【0092】
時間tkでの測定値は、計測器からの加速度データ、あるいはGPS入力または加速度計データからの速度または一部の位置データ、または一部の速度または位置データが、ΔVデータとして含まれ、これらの値は、yベクトルの値として{y1、y2、・・・yn}のようにアレイ化される。我々が必要としているのは、各更新時のシステム状態の推定値である。
【0093】
この処理は、1Hzのサンプリング速度で、GPS情報を用いて時間インデックスまたはサンプル・インデックスが付けられる。GPSサンプル間で、測定インデックス・カウンタまたはkカウンタを用いて、このシステムは過去のサンプルと状態すべての再処理を行い、インデックスが1からnまでカウントされるように、インデックスを与える。
【0094】
この処理には、過去のサンプリング時間tkでのシステム状態ベクトルについての知識に基づいた推定値を得るために、時間の流れをさかのぼる目的がある。GPS位置データなどの測定データは、サンプルnとしてインデックスを付与された測定値として受信した最後のサンプルとともに、サンプル1からkとして取得または受信したように、インデックスを付与される。
【0095】
図6は、開始時の処理の初期状態に関する知識に基づくt=t0での共分散行列の初期化P(0)=P(t0)を行うブロック600で開始する。ブロック602は、サンプル・インデックス・カウンタ(kカウンタ)が、1にセットされたのを示し、ブロック604は、時間tがtnよりも大かどうかを確認するテストを行う。その時間が、tn以下の場合は、テストはブロック606に進み、インデックス・カウンタを1だけ増加させる。
【0096】
ブロック608は、システム状態ベクトルまたは推定状態ベクトルχを、時間tk−1からtkに進めるステップを表す。記号φk−1は、システム方程式または伝達関数を表す。この伝達関数φk−1が、システムの状態ベクトルχを、時間tk−1からtkに進める。状態行列「χ」として表された状態ベクトルは、「m」×1次元の列行列である。共分散行列Pは、「m」×「m」次元である。
【0097】
次に、この処理はブロック610に進む。このステップでは、フローチャートにより、方程式
を用いて、共分散行列Pが時間tk−1からtkに進められる。この方程式では、項Pkは、状態ベクトル
のフィルタ推定に関連する誤差の共分散行列である。伝達関数φk−1とその転置
とが、この式に導入される。項Qk−1は、処理雑音の共分散行列である。
【0098】
ブロック612では、時間t=tkでのカルマン・フィルタの利得を計算する。記号Gkは、カルマン利得を表す。項Hkは、時間t=tkでの測定行列または観測行列であり、
は、時間t=tkでの測定行列の転置を表す。この測定行列は、通常は、VXやVYなどの要素から構成される。yベクトルまたは測定ベクトルは、H行列と状態ベクトルχの積で作られ、この積が、測定雑音行列に加算される。
【0099】
ブロック612にある式中の括弧内で、誤差共分散行列
は、測定行列の転置
と乗算される。この2つの積は、次に、測定行列Hkと乗算される。この積の結果が測定雑音ベクトルの共分散行列Rkに加算される。
【0100】
このRk行列は、実証的検定によってシステム・エンジニアが集めた情報から得られる。システム・エンジニアは、何の雑音がどのセンサと関連しているのかを、各測定変数に関する蓄積された雑音データを集めることで決定する。HK行列は、既知であり、ハードウェアや機器に依存したものである。カルマン利得が決定されると、次に、これは、ブロック614での状態ベクトルの推定を更新するのに用いられる。各測定値が選ばれるときは、その測定値自身が状態の結合関数である。例えば、発射体の速度は、速度のxおよびy成分の結果として生じたものであろう。この結果は、それぞれの測定値の一次結合である。
【0101】
処理はブロック614に進み、方程式
を用いて、システム状態推定ベクトルが、時間tkに対して更新される。項Hkは、項
と乗算する。その結果は、ykから差し引かれる。この結果は、観測可能な差異であり、それにカルマン利得を掛け、次に前の推定状態ベクトル
を加える。
【0102】
の上付き文字におけるマイナス符号は、k番目の更新よりも少し前の状態を表すことを意味する。サンプル・インデックス「k」は、1からnまでの値をとることが可能である。ここで、nは、時間的に最も新しい更新インデックスである。上付き文字が無い状態変数は、状態変数値が、更新直後に存在する値であることを意味する。記号
は、状態ベクトルχのk番目の推定値を表す。yk測定が行われた場合、k番目の更新は、このyk測定に対して行われる。測定インデックス「k」は、実行インデックスである。
【0103】
時間t=tkで、ブロック614に示す方程式の値を求めることによって状態ベクトルを更新すると、処理は、ブロック616の次に示す方程式へと進む。
【数29】
この式は、共分散行列Pkを更新するのに用いられる。行列Iは、単位行列である。別項に特に記載がなければ、その要素のすべては、主対角要素を除いてゼロである。単位行列の次元は、Gk行列とHk行列の積と一致する。共分散行列の計算に必要なすべての値は、これより以前のステップから入手可能である。
【0104】
Pk行列の計算後、処理は、ブロック616を抜け出し、判定ブロック604に戻り、再び、t>tnであるかどうかを確認するテストを行う。時間がtnに達すると、測定値すべてが処理される。これ以上の追加測定は行われない。ここで「Yes」の結果、処理は、シナリオ完了ブロック618へと進み、処理の役目は完了する。飛行が100秒間続き、GPSが毎秒1回の割合で一測定値を提供したならば、100個のGPSサンプルがあったであろうし、サンプル・インデックスkは、1から100まで増加したことになったであろう。インデックス「k」は、100を越えることはできない。
【0105】
図7aおよび7bで、固定間隔スムーザが形成され、図7aは前方パスを規定し、図7bは後方パスを規定する。図7aは、ブロック700を除いて図6と機能的に同一と見ることができる。この処理は、ブロック700を出た後、ブロック702に進む。このブロック702は、図7bの先頭にもある。後方掃引は、サンプル・インデックス・カウンタ、つまりkカウンタを現在のインデックス値nにして、ブロック704で開始する。図7bに示す後方掃引処理の目的は、スムーザの推定値
、およびスムーザの誤差の共分散行列
を、インデックス・カウンタ「k」が、k=n、n−1、n−2、・・・、1へと減少するときのn個の測定値すべてを用いて計算することである。式χs(k)および式Ps(k)の下付き文字sは、スムージングされた変数であることを示す。
【0106】
この処理は、ブロック706に進み、次の式で表されるスムーザ利得を計算する。
【数30】
(k|k)などの項における「k」が後に続く縦棒は、行列が、k番目の測定値を含む、それまでのすべての測定値に対し、値が求められることを意味する。後方掃引は、前方掃引が終了した後のみ開始する。k個すべての測定値は、前方掃引の終了と共に入手可能である。k個のデータ点すべてによって、固定間隔が形成され、tkからt1までのn個の測定値すべてが、後方掃引に間に用いられる。
【0107】
共分散行列P(k|k)は、時間t=kでの伝達関数φkの転置と乗算される。
【0108】
ブロック706の最も右側の項は、k個の測定値すべてを用いた、時間tk+1での共分散行列P(k+1|k)の逆行列である。「k」が後に続く縦棒は、kまでの測定値に対するデータすべてが用いられることを示す。
【0109】
この処理は、次に、ブロック708に進む。ブロック708における方程式の目的は、スムージングされた状態ベクトル
を、n個の測定値すべてを用いて計算することである。このブロック708にある方程式は、次のとおりである。
【数31】
【0110】
利得行列A(k)は、ブロック706で得られる。等号の後にある最初の項は、k番目の測定までに行われた測定データを用いたk番目の状態ベクトル推定値である。括弧内の第1項
は、n番目の測定までに行われた測定データを用いた、時間k+1での状態ベクトル推定値である。括弧内の第2項
は、時間tkまでのすべての測定値を用いた、時間k+1での状態ベクトル推定値である。この差は、第1項から第2項を引くことで計算される。その結果が、利得行列に掛けられ、さらにその積が
に加えられる。
【0111】
次に、処理はブロック710に進み、スムージングされた共分散行列を、次の方程式を用いて計算する。
【数32】
【0112】
等号の後にある最初の共分散項P(k|k)は、k番目の更新までのすべてのデータを用いる。括弧内の最初の共分散項P(k+1|n)は、n番目の測定までに行った測定データすべてを用いる。括弧内の2番目の共分散項P(k+1|k)は、k番目の更新までのデータのみを用いる。共分散行列の差は、この括弧内の2つの共分散項によって計算される。この共分散項の差は、次に、利得行列と掛けられ、さらにその結果がP(k|k)に加えられる。
【0113】
スムージングされた共分散推定が計算されると、処理はブロック712に進み、測定インデックス・カウンタをkからk−1に減少させる。この処理は、次に判定ブロック714に進み、測定インデックス行列kが1よりも大きいかどうか判定するテストが行われる。「No」という判定の場合は、k=1になるまでループまたはサイクルが続き、ブロック706に戻る。k=1になると、ブロック714でのテストは、「Yes」判定を生じ、この処理は後方掃引完了ブロックであるブロック716に進む。ブロック716は、発射体が目標に接近しているというプログラムの完了信号を出す。
【0114】
これらの好適な実施形態に関する各種の改良形態や修正形態が、この発明の範囲や精神から逸脱することなく構成可能であることは、当業者には当然のことである。従って、当然のことながら、添付の請求項の範囲内で、この発明は、本明細書に具体的に記載したような方法以外で実現することが可能である。
【図面の簡単な説明】
【0115】
【図1】機内搭載用GPS受信機、移動体の構造に連結された一組の加速度計、複数のアンテナ、および本発明の方法を実行するための機内搭載用コンピュータ・カードを備えた発射体または無人運転の飛行装置の分解斜視図である。
【図2】発射用車両、および軌道周囲にある飛行誤差包絡線を備えた所望の軌道を示す図である。
【図3a】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3b】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3c】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図3d】飛行軌道を推定するための、加速度計とGPSデータとの処理を示すブロック図である。
【図4】通常の座標系を示し、回転角を定義する航空機の斜視図である。
【図5】ロール角計算での機能ステップを示すブロック図である。
【図6】通常のカルマン・フィルタにおける処理ステップと、別のロール角の計算とを示すフローチャートである。
【図7a】通常のスムーザにおける前方フィルタの各ステップを示すフローチャートである。
【図7b】通常のスムーザにおける後方フィルタの各ステップを示すフローチャートである。
【図8】GPS信号妨害電波が存在しているときの、回転発射体上の複数のアンテナによって受信された時間依存性を持つGPS信号を示す図である。
【特許請求の範囲】
【請求項1】
加速度計とGPS受信機とを備えた発射体誘導システムであって、
発射体に搭載した3軸の加速度計を有し、ロール、ピッチ、およびアジマス軸の加速度データを提供する発射体と、
現在の位置データを提供し、更新するための前記発射体に搭載したGPSアンテナおよび受信機手段と、
前記発射体に搭載し、誘導プログラムを実行するコンピュータおよびメモリとを備え、
前記誘導プログラムは、前記ロール、ピッチ、およびアジマス軸の加速度データと、サンプリングした前記現在の位置データとに応答し、時間インデックス付きのロール、ピッチ、およびアジマス角と、時間インデックス付きの現在の位置と速度を計算し、前記発射体を所定の目標位置に誘導する飛行制御システムに出力し、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【請求項2】
前記GPSアンテナおよび受信機手段は、他とは異なる方向からのGPS信号を受信する方位に向けた各アンテナからなる複数のアンテナを備える請求項1に記載の発射体誘導システム。
【請求項3】
前記妨害電波対抗手段は、前記発射体に、周期的動作を行わせるように構成される請求項1に記載の発射体誘導システム。
【請求項4】
前記妨害電波対抗手段は、選択的かつ周期的に、妨害電波を示すGPS信号を回避するように構成される請求項1に記載の発射体誘導システム。
【請求項5】
前記妨害電波対抗手段は、1つまたは複数のアンテナが、実質的に連続して妨害電波を受けていないGPS信号を受信できるように、前記発射体に、前記GPSアンテナおよび受信機手段の方位を維持させるように構成される請求項1に記載の発射体誘導システム。
【請求項6】
妨害電波を受けていないGPS信号が、実質的に連続して受信できない場合は、前記妨害電波対抗手段は、前記発射体に周期的動作を行わせ、選択的かつ周期的に、妨害電波を示すGPS信号を回避するようにさらに構成される請求項5に記載の発射体誘導システム。
【請求項7】
前記GPSアンテナおよび受信機手段は、GPS信号を受信後、実質的に即時に、RF信号からデジタルGPS信号に変換するように構成される請求項1に記載の発射体誘導システム。
【請求項8】
前記GPSアンテナおよび受信機手段は、前記デジタルGPS信号を、デジタル処理で実現した自動利得制御回路を介して送信するようにさらに構成される請求項7に記載の発射体誘導システム。
【請求項9】
前記誘導プログラムは、前記発射体が周期的動作を行っている間に、操縦翼面の方位が、前記発射体の進路を取るのに望ましい方向と一致するのを待つことによって、軌道補正を行わせるように構成される請求項3に記載の発射体誘導システム。
【請求項10】
前記誘導プログラムは、前記発射体の前記周期的動作を終了させ、その後、前記発射体の前記周期的動作が終了している間に軌道補正を行わせるようにさらに構成される請求項3に記載の発射体誘導システム。
【請求項11】
前記誘導プログラムは、前記発射体のロール方位を、回転ジャイロによって発生した信号を用いて決定するように、さらに構成される請求項10に記載の発射体誘導システム。
【請求項12】
前記誘導プログラムは、前記発射体のロール方位を、GPS衛星のロール位置を用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項13】
前記誘導プログラムは、前記発射体のロール方位を、複数のアンテナによるGPS姿勢決定を用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項14】
前記誘導プログラムは、前記発射体のロール方位を、磁気回転カウンタを用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項15】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項16】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ・アジマス角と、前記目標地点と、回転カウンタからのデータとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項17】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、各現在位置のデータ更新後に、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項18】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、前記発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタおよび後方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項19】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、スムージングした前記発射体の推定軌道を計算して出力するためであり、スムージングした時間インデックス付き軌道データを有するデータを反復し、このスムージングした時間インデックス付き軌道データを、前記発射体を前記目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方カルマン掃引巡回フィルタおよび後方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項20】
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して推定した本体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データ、およびGPS速度および位置データに応答する前記プログラム手段とを備えるジャイロを持たない発射体誘導システムであって、
前記GPSアンテナおよび受信機手段は、前記現在位置のデータにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【請求項21】
前記GPSアンテナおよび受信機手段は、他とは異なる方向からのGPS信号を受信する方位に向けた各アンテナからなる複数のアンテナを備える請求項20に記載の発射体誘導システム。
【請求項22】
前記妨害電波対抗手段は、前記発射体に、周期的動作を行わせるように構成される請求項20に記載の発射体誘導システム。
【請求項23】
前記妨害電波対抗手段は、選択的かつ周期的に、妨害電波を示すGPS信号を回避するように構成される請求項20に記載の発射体誘導システム。
【請求項24】
前記妨害電波対抗手段は、1つまたは複数のアンテナが、実質的に連続して妨害電波を受けていないGPS信号を受信できるように、前記発射体に、前記GPSアンテナおよび受信機手段の方位を維持させるように構成される請求項20に記載の発射体誘導システム。
【請求項25】
妨害電波を受けていないGPS信号が、実質的に連続して受信できない場合は、前記妨害電波対抗手段は、前記発射体に周期的動作を行わせ、選択的かつ周期的に、妨害電波を示すGPS信号を回避するようにさらに構成される請求項24に記載の発射体誘導システム。
【請求項26】
前記GPSアンテナおよび受信機手段は、GPS信号を受信後、実質的に即時に、RF信号からデジタルGPS信号に変換するように構成される請求項20に記載の発射体誘導システム。
【請求項27】
前記GPSアンテナおよび受信機手段は、前記デジタルGPS信号を、デジタル処理で実現した自動利得制御回路を介して送信するようにさらに構成される請求項26に記載の発射体誘導システム。
【請求項28】
前記誘導プログラムは、前記発射体が周期的動作を行っている間に、操縦翼面の方位が、前記発射体の進路を取るのに望ましい方向と一致するのを待つことによって、軌道補正を行わせるように構成される請求項22に記載の発射体誘導システム。
【請求項29】
前記誘導プログラムは、前記発射体の前記周期的動作を終了させ、その後、前記発射体の前記周期的動作が終了している間に軌道補正を行わせるようにさらに構成される請求項22に記載の発射体誘導システム。
【請求項30】
ジャイロを持たない移動体または発射体の誘導のための発射体誘導システムの方法であって、前記移動体は、発射され、またロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた直交座標系と、地球の基準航行座標におけるGPS位置およびGPS速度データを提供するGPSアンテナおよび受信機手段とを有し、
前記GPS位置および速度データを、x、y、およびz軸加速度データとともに、一組の状態方程式の関数として、前記移動体に対して軌道を計算するためのプログラムを実行するコンピュータおよびメモリ手段を用いて受信し、インデックスを付け、記憶するステップと、前記プログラムが、
前記x、y、およびz軸加速度データを局所レベルの航行基準座標系に変換するステップと、次に、前記プログラムが、
前記システムの推定状態を更新するために、一組の時間インデックス付き状態方程式を解くステップと、次に、
局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を計算するステップと、次に、前記プログラムが、
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに、前記発射体を目的地に誘導する飛行制御システムに出力するステップとを含み、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システムの方法。
【請求項31】
GPS位置および速度データを、x、y、およびz軸加速度データとともに受信し、インデックスを付け、記憶する前記ステップの前に、
一組の状態方程式に加える一組の初期条件を推定して提供するステップと、
前記移動体の軌道を、前記一組の状態方程式の関数として計算し、また前記推定した初期条件を計算するステップとを含む請求項30に記載の発射体誘導システムの方法。
【請求項32】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータに基づき計算するステップを実行する請求項30に記載の発射体誘導システムの方法。
【請求項33】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップを実行する請求項30に記載の発射体誘導システムの方法。
【請求項34】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップと、
発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタを用いるステップとを実行する請求項30に記載の発射体誘導システムの方法。
【請求項35】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップと、
前方掃引巡回フィルタと後方掃引巡回フィルタとを用いるステップとを実行し、
ジャイロを持たない発射体誘導システムは、
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置、速度、および加速度データの時間インデックスが繰り返されるたびに、その局所レベルに関して推定した発射体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データと、GPS速度および位置データとに応答する前記プログラム手段とを備え、
前記各フィルタは、発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する請求項30に記載の発射体誘導システムの方法。
【請求項36】
ジャイロを持たない発射体誘導システムであって、
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置、速度、および加速度データの時間インデックスが繰り返されるたびに、その局所レベルに関して推定した発射体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データと、GPS速度および位置データとに応答する前記プログラム手段とを備え、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【請求項1】
加速度計とGPS受信機とを備えた発射体誘導システムであって、
発射体に搭載した3軸の加速度計を有し、ロール、ピッチ、およびアジマス軸の加速度データを提供する発射体と、
現在の位置データを提供し、更新するための前記発射体に搭載したGPSアンテナおよび受信機手段と、
前記発射体に搭載し、誘導プログラムを実行するコンピュータおよびメモリとを備え、
前記誘導プログラムは、前記ロール、ピッチ、およびアジマス軸の加速度データと、サンプリングした前記現在の位置データとに応答し、時間インデックス付きのロール、ピッチ、およびアジマス角と、時間インデックス付きの現在の位置と速度を計算し、前記発射体を所定の目標位置に誘導する飛行制御システムに出力し、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【請求項2】
前記GPSアンテナおよび受信機手段は、他とは異なる方向からのGPS信号を受信する方位に向けた各アンテナからなる複数のアンテナを備える請求項1に記載の発射体誘導システム。
【請求項3】
前記妨害電波対抗手段は、前記発射体に、周期的動作を行わせるように構成される請求項1に記載の発射体誘導システム。
【請求項4】
前記妨害電波対抗手段は、選択的かつ周期的に、妨害電波を示すGPS信号を回避するように構成される請求項1に記載の発射体誘導システム。
【請求項5】
前記妨害電波対抗手段は、1つまたは複数のアンテナが、実質的に連続して妨害電波を受けていないGPS信号を受信できるように、前記発射体に、前記GPSアンテナおよび受信機手段の方位を維持させるように構成される請求項1に記載の発射体誘導システム。
【請求項6】
妨害電波を受けていないGPS信号が、実質的に連続して受信できない場合は、前記妨害電波対抗手段は、前記発射体に周期的動作を行わせ、選択的かつ周期的に、妨害電波を示すGPS信号を回避するようにさらに構成される請求項5に記載の発射体誘導システム。
【請求項7】
前記GPSアンテナおよび受信機手段は、GPS信号を受信後、実質的に即時に、RF信号からデジタルGPS信号に変換するように構成される請求項1に記載の発射体誘導システム。
【請求項8】
前記GPSアンテナおよび受信機手段は、前記デジタルGPS信号を、デジタル処理で実現した自動利得制御回路を介して送信するようにさらに構成される請求項7に記載の発射体誘導システム。
【請求項9】
前記誘導プログラムは、前記発射体が周期的動作を行っている間に、操縦翼面の方位が、前記発射体の進路を取るのに望ましい方向と一致するのを待つことによって、軌道補正を行わせるように構成される請求項3に記載の発射体誘導システム。
【請求項10】
前記誘導プログラムは、前記発射体の前記周期的動作を終了させ、その後、前記発射体の前記周期的動作が終了している間に軌道補正を行わせるようにさらに構成される請求項3に記載の発射体誘導システム。
【請求項11】
前記誘導プログラムは、前記発射体のロール方位を、回転ジャイロによって発生した信号を用いて決定するように、さらに構成される請求項10に記載の発射体誘導システム。
【請求項12】
前記誘導プログラムは、前記発射体のロール方位を、GPS衛星のロール位置を用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項13】
前記誘導プログラムは、前記発射体のロール方位を、複数のアンテナによるGPS姿勢決定を用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項14】
前記誘導プログラムは、前記発射体のロール方位を、磁気回転カウンタを用いて決定するようにさらに構成される請求項10に記載の発射体誘導システム。
【請求項15】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項16】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ・アジマス角と、前記目標地点と、回転カウンタからのデータとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項17】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、各現在位置のデータ更新後に、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項18】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、前記発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタおよび後方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項19】
前記誘導プログラムは、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点と、回転カウンタからのデータと、スムージングした前記発射体の推定軌道を計算して出力するためであり、スムージングした時間インデックス付き軌道データを有するデータを反復し、このスムージングした時間インデックス付き軌道データを、前記発射体を前記目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方カルマン掃引巡回フィルタおよび後方掃引巡回フィルタとを含むデータに基づいて、前記発射体の推定軌道を計算するようにさらに特徴付けられる請求項1に記載の発射体誘導システム。
【請求項20】
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置の時間インデックスが繰り返されるたびに、その局所レベルに関して推定した本体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データ、およびGPS速度および位置データに応答する前記プログラム手段とを備えるジャイロを持たない発射体誘導システムであって、
前記GPSアンテナおよび受信機手段は、前記現在位置のデータにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【請求項21】
前記GPSアンテナおよび受信機手段は、他とは異なる方向からのGPS信号を受信する方位に向けた各アンテナからなる複数のアンテナを備える請求項20に記載の発射体誘導システム。
【請求項22】
前記妨害電波対抗手段は、前記発射体に、周期的動作を行わせるように構成される請求項20に記載の発射体誘導システム。
【請求項23】
前記妨害電波対抗手段は、選択的かつ周期的に、妨害電波を示すGPS信号を回避するように構成される請求項20に記載の発射体誘導システム。
【請求項24】
前記妨害電波対抗手段は、1つまたは複数のアンテナが、実質的に連続して妨害電波を受けていないGPS信号を受信できるように、前記発射体に、前記GPSアンテナおよび受信機手段の方位を維持させるように構成される請求項20に記載の発射体誘導システム。
【請求項25】
妨害電波を受けていないGPS信号が、実質的に連続して受信できない場合は、前記妨害電波対抗手段は、前記発射体に周期的動作を行わせ、選択的かつ周期的に、妨害電波を示すGPS信号を回避するようにさらに構成される請求項24に記載の発射体誘導システム。
【請求項26】
前記GPSアンテナおよび受信機手段は、GPS信号を受信後、実質的に即時に、RF信号からデジタルGPS信号に変換するように構成される請求項20に記載の発射体誘導システム。
【請求項27】
前記GPSアンテナおよび受信機手段は、前記デジタルGPS信号を、デジタル処理で実現した自動利得制御回路を介して送信するようにさらに構成される請求項26に記載の発射体誘導システム。
【請求項28】
前記誘導プログラムは、前記発射体が周期的動作を行っている間に、操縦翼面の方位が、前記発射体の進路を取るのに望ましい方向と一致するのを待つことによって、軌道補正を行わせるように構成される請求項22に記載の発射体誘導システム。
【請求項29】
前記誘導プログラムは、前記発射体の前記周期的動作を終了させ、その後、前記発射体の前記周期的動作が終了している間に軌道補正を行わせるようにさらに構成される請求項22に記載の発射体誘導システム。
【請求項30】
ジャイロを持たない移動体または発射体の誘導のための発射体誘導システムの方法であって、前記移動体は、発射され、またロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた直交座標系と、地球の基準航行座標におけるGPS位置およびGPS速度データを提供するGPSアンテナおよび受信機手段とを有し、
前記GPS位置および速度データを、x、y、およびz軸加速度データとともに、一組の状態方程式の関数として、前記移動体に対して軌道を計算するためのプログラムを実行するコンピュータおよびメモリ手段を用いて受信し、インデックスを付け、記憶するステップと、前記プログラムが、
前記x、y、およびz軸加速度データを局所レベルの航行基準座標系に変換するステップと、次に、前記プログラムが、
前記システムの推定状態を更新するために、一組の時間インデックス付き状態方程式を解くステップと、次に、
局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を計算するステップと、次に、前記プログラムが、
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに、前記発射体を目的地に誘導する飛行制御システムに出力するステップとを含み、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システムの方法。
【請求項31】
GPS位置および速度データを、x、y、およびz軸加速度データとともに受信し、インデックスを付け、記憶する前記ステップの前に、
一組の状態方程式に加える一組の初期条件を推定して提供するステップと、
前記移動体の軌道を、前記一組の状態方程式の関数として計算し、また前記推定した初期条件を計算するステップとを含む請求項30に記載の発射体誘導システムの方法。
【請求項32】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータに基づき計算するステップを実行する請求項30に記載の発射体誘導システムの方法。
【請求項33】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップを実行する請求項30に記載の発射体誘導システムの方法。
【請求項34】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップと、
発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する前方掃引巡回フィルタを用いるステップとを実行する請求項30に記載の発射体誘導システムの方法。
【請求項35】
前記局所レベルの座標系の時間インデックス付きピッチ、ロール、およびヨー角を、対応する時間インデックス付き現在位置とともに出力する前記ステップの後に、
推定した発射体の軌道を、発射場所の現在位置と、初期ピッチ角と、アジマス角と、前記目標地点とを含むデータ、および回転カウンタからのデータに基づき計算するステップと、
前方掃引巡回フィルタと後方掃引巡回フィルタとを用いるステップとを実行し、
ジャイロを持たない発射体誘導システムは、
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置、速度、および加速度データの時間インデックスが繰り返されるたびに、その局所レベルに関して推定した発射体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データと、GPS速度および位置データとに応答する前記プログラム手段とを備え、
前記各フィルタは、発射体の推定軌道を計算してスムージングするためであり、さらに、そのスムージングした時間インデックス付き軌道データを、前記発射体を前記所定の目標位置に誘導するのに用いる前記飛行制御システムに出力するための以前記憶された時間インデックス付きデータに応答する請求項30に記載の発射体誘導システムの方法。
【請求項36】
ジャイロを持たない発射体誘導システムであって、
発射後の飛行中の発射体または移動体であって、ロール測定用の長手方向またはx軸と、ピッチ測定用のy軸と、ヨー測定用のz軸とを備えた本体直交座標系を有す発射体と、
前記x軸に沿って測定したx軸加速度データを提供するx加速度計と、前記y軸に沿って測定したy軸加速度データを提供するy加速度計と、前記z軸に沿って測定したz軸加速度データを提供するz加速度計とを備える少なくとも3軸の加速度計を有す前記発射体と、
地球の基準航行座標における搭載GPSの位置データおよびGPSの速度データを提供するGPSアンテナおよび受信機手段と、
時間インデックス付きGPS位置データおよびGPS速度データを記憶しアクセスするためであって、かつアレイ化され、前記GPS位置および速度データと共通の時間インデックスを有す前記x、y、およびz軸加速度データを本体座標から航行座標へ変換するためのコンピュータとメモリとプログラム手段と、
現在位置、速度、および加速度データの時間インデックスが繰り返されるたびに、その局所レベルに関して推定した発射体のロール、ピッチ、およびヨー角を計算して、前記発射体を所定の目標位置に誘導する飛行制御システムに出力するために、対応する時間インデックス付き加速度データと、GPS速度および位置データとに応答する前記プログラム手段とを備え、
前記GPSアンテナおよび受信機手段は、前記現在の位置データにあるGPS妨害電波の存在を検出するように構成されたGPS妨害電波検出器を備え、
前記GPSアンテナおよび受信機手段は、妨害電波対抗手段をさらに備える発射体誘導システム。
【図3a】

【図3b】
【図6】
【図7a】
【図7b】
【図8】
【図1】
【図2】
【図3c】
【図3d】
【図4】
【図5】
【図3b】
【図6】
【図7a】
【図7b】
【図8】
【図1】
【図2】
【図3c】
【図3d】
【図4】
【図5】
【公表番号】特表2006−514258(P2006−514258A)
【公表日】平成18年4月27日(2006.4.27)
【国際特許分類】
【出願番号】特願2004−571469(P2004−571469)
【出願日】平成15年11月12日(2003.11.12)
【国際出願番号】PCT/US2003/035849
【国際公開番号】WO2004/097329
【国際公開日】平成16年11月11日(2004.11.11)
【出願人】(505357225)リットン システムズ、インク (1)
【Fターム(参考)】
【公表日】平成18年4月27日(2006.4.27)
【国際特許分類】
【出願日】平成15年11月12日(2003.11.12)
【国際出願番号】PCT/US2003/035849
【国際公開番号】WO2004/097329
【国際公開日】平成16年11月11日(2004.11.11)
【出願人】(505357225)リットン システムズ、インク (1)
【Fターム(参考)】
[ Back to top ]