
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明の実施形態は、動画像の画像ブロック毎の動きベクトルを算出する動きベクトル算出装置に関する。
【背景技術】
【0002】
従来、画像ブロック内の画像内容の性質に応じて画像ブロックサイズの増減を行い、時空間輝度勾配(差分)ベクトル分布に対応した適正な画像ブロックサイズを用いた動き量の推定を行うことで、より正確な動き量の推定を行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−51788号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術で動きベクトル算出処理を行う場合は、3×3の輝度勾配共分散行列の固有値を算出し、この固有値から固有ベクトルを算出していることから、高い信頼度の動きベクトルの評価が可能である。
【0005】
しかし、3×3行列の固有値を求めることは、3次方程式の解を求めることである。この場合、数値演算処理として初期値を設定し、反復演算によって所要精度まで繰り返すニュートン法や2分法等が用いられる。固有値は3個存在するので、この数値演算も3回必要である。画像はブロックに分割処理され、ブロック毎にこの演算を行い、動画像信号なので毎フレーム処理が行われ、全体システムとして膨大な演算量が必要となる。加えて、3次式において飽和せずしかも微小値が丸めで切り捨てられないためには浮動小数点処理あるいは膨大な桁数の固定小数点処理が必要となる。このような演算を実行するために必要な例えば1/30秒以内とするには演算時間が間に合わない、という問題があった。
【0006】
この実施形態では、動画像の画像ブロック毎の動きベクトルを算出する演算量を低減した動きベクトル算出装置を提供する。
【課題を解決するための手段】
【0007】
実施形態によれば、画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)[(1/N)Σεi2−{(1/N)Σεi}2]とする。
【0008】
また、画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)(1/N)Σεi2とする。
【0009】
さらに、映像信号から抽出された画像ブロックの全ての画素から水平、垂直、時間の輝度勾配ベクトルの共分散行列(3×3)を算出する輝度勾配共分散行列算出部と、前記輝度勾配ベクトルの共分散行列(3×3)の要素から動きベクトルを算出する動きベクトル算出部と、前記輝度勾配ベクトルの共分散行列(3×3))の三番目に大きい固有値λ3を算出する第1の算出部と、前記輝度勾配ベクトルの共分散行列(3×3)の時間方向の勾配ベクトルを0としたときの輝度勾配ベクトルの共分散行列(2×2)の一番目に大きい固有値λ'1、次に二番目に大きい固有値λ'2を算出する第2の算出部と、を備える。
【図面の簡単な説明】
【0010】
【図1】動きベクトル算出装置に関する第1の実施形態について説明するための概念的な回路構成図である。
【図2】ある画像ブロック内の各輝度勾配ベクトルと同画像ブロックの移動ベクトルのなす角度θについて説明するための説明図である。
【図3】輝度勾配ベクトルの分布の概念について説明するための説明図である。
【図4】動きベクトル算出装置に関する第2の実施形態について説明するための概略的なシステム構成図である。
【図5】3×3固有値と2×2固有値について説明するための説明図である。
【図6】図5の固有ベクトルξ1',ξ2'を平面上で説明するための説明図である。
【発明を実施するための形態】
【0011】
以下、実施形態について、図面を参照しながら詳細に説明する。なお、以下で説明する図面で、同一機能を有するものは同一符号を付け、その繰り返しの説明は省略する。
【0012】
(第1の実施形態)
図1は、動きベクトル算出装置に関する第1の実施形態について説明するための概念的な回路構成図である。
【0013】
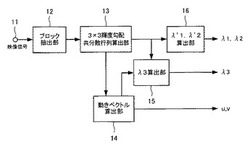
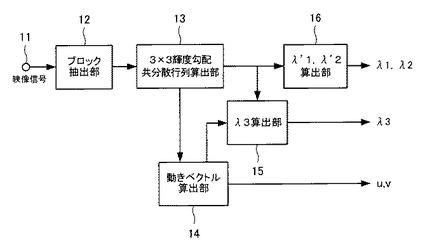
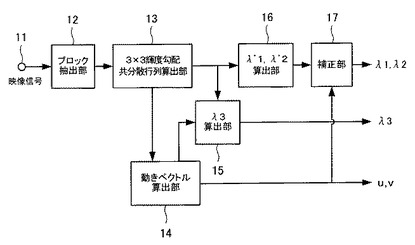
図1に示す動きベクトル算出装置は、動画像の映像信号が入力される入力端子11、映像信号の画像ブロックの位置・サイズ情報を抽出するブロック抽出部12、M×N画像ブロックの全ての画素から水平x、垂直y、時間tの輝度勾配ベクトルの共分散行列3×3が算出される輝度勾配共分散行列算出部13、輝度勾配ベクトルの3×3共分散行列から動きベクトルを算出する動きベクトル算出部14、輝度勾配ベクトルの3×3共分散行列の三番目に大きい固有値λ3を算出するλ3算出部15、輝度勾配ベクトルの3×3共分散行列の一番目に大きい固有値λ1,次に二番目に大きい固有値λ2の擬似的な値をもつ、2×2共分散行列の一番目に大きい固有値λ'1,次に二番目に大きい固有値λ'2を算出するλ'1,λ'2算出部16から構成される。
【0014】
図1において、入力端11に入力された映像信号は、ブロック抽出部12に供給され、ここで指定された指定された位置(x,y)およびサイズM×Nの画像ブロックが抽出される。画像ブロック位置(水平x,垂直y)は、ブロック位置情報に基づき指定される。画像ブロックのサイズM,Nは、予め指定された縦方向及び横方向の画素数である。ブロック抽出部12は供給された動画像の異なる時間t,t+t1 ,t+t2 ,…の画像の画像ブロックを抽出する。抽出された画像ブロックは、次段の輝度勾配共分散行列算出部13に供給される。
【0015】
輝度勾配共分散行列算出部13に映像信号が入力され、映像信号の3方向(水平x、垂直y、時間t)の輝度勾配ベクトルが算出され、このx,y,tの各方向の差分値をIx,Iy,Itと表記する。
【0016】
Ix:x方向の輝度勾配ベクトル(x方向差分値)
Iy:y方向の輝度勾配ベクトル(y方向差分値)
It:t方向の輝度勾配ベクトル(t方向差分値)
また、輝度勾配共分散行列算出部13は、以下に示す処理を行い、3×3輝度勾配共分散行列Aを算出する。ある画像ブロック内の各画素の輝度勾配ベクトルを次式で表す。
【0017】
輝度勾配ベクトルgi=(Ix,Iy,It)t ・・・ (1)
ある画像ブロックの全てのN画素についての和を、Σで表し、輝度勾配ベクトルgi=(Ix,Iy,It)tから輝度勾配共分散行列Aが定義される。
【数1】

【0018】
輝度勾配共分散行列算出部13において算出された輝度共分散行列Aの成分は、動きベクトル算出部14に入力される。動きベクトル算出部14では、輝度共分散行列Aの成分から動きベクトルm=(u,v)tを算出する。
【0019】
次に、動きベクトルmの算出動作を説明する。公知のように、微小時間において映像(輝度)信号は変化しないという条件から、次式に示す勾配法による動きベクトルの拘束式が得られる。
【0020】
Ix u+Iy v+It=0 ・・・ (4)
ただし、uは動きベクトルmのx成分、vは動きベクトルmのy成分とする。同時に、動きベクトル(u,v)を3次元へ拡張したベクトルである移動ベクトルをw=(u,v,1)tと定義する。基本拘束式(4)は輝度勾配ベクトルgi=(Ix,Iy,It)tと移動ベクトルをw=(u,v,1)tを用いて次式で表される。
【0021】
git・w=(Ix,Iy,It)(u,v,1)t=0 ・・ (5)
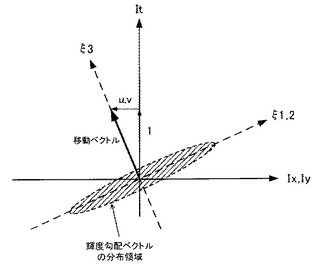
ここで、輝度勾配ベクトルgi=(Ix,Iy,It)tの分布の概念を図3に示す。
【0022】
次に、評価関数Eを定義する。
【0023】
E=Σ(git・w)2
=Σ{(Ix i,Iy i ,It i)(u,v,1)t}2 ・・・ (6)
=Σ(Ix u+Iy v+It)2 ・・・ (7)
=Σix2u2+Σiy2v2+Σit2+ΣIx Iy uv+ΣIxIt u+ΣIyIt v ・・・(7)
式(7)明らかなように、各係数は式(3)の輝度勾配ベクトルの共分散行列成分として表される。
【0024】
a11=Σix2,a22=Σiy2,a33=Σit2,a12=ΣIxIy,a13=ΣIxIt,a23=ΣIyIt
評価関数Eの極値を与えるuvを求める。
【0025】
∂E/∂u=Σix2 u+ΣixIy v+ΣIxIt=0 ・・・ (8)
∂E/∂v=Σiy2 v+ΣixIy u+ΣIyIt=0 ・・・ (9)
行列表記すれば、
【数2】
式(8),(9)あるいは(10)の係数は、輝度勾配共分散行列Aの成分として表記することができ、
【数3】
輝度共分散行列Aの成分を係数とした2元1次方程式に帰着するので、単純な四則演算で解u,vを求められる。動きベクトルm=(u,v)t、移動ベクトルw=(u,v,1)tが決定される。この(u,v)を式(7)へ代入して評価関数Eの極値が得られる。
【0026】
次に、λ3算出部15は、動きベクトル算出部14から動きベクトルm=(u,v)と輝度勾配共分散行列算出部13から輝度共分散行列Aの成分を受けて、輝度勾配共分散行列Aの三番目の固有値λ3を算出する。
【0027】
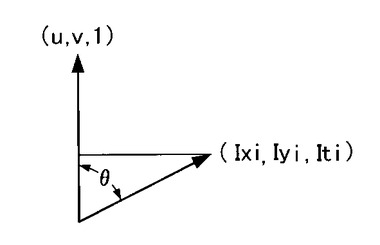
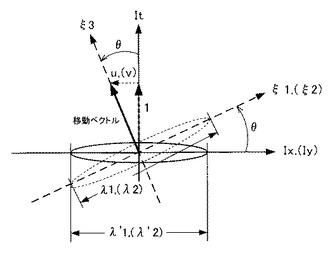
図2に示すように、ある画像ブロック内の各輝度勾配ベクトルgi=(Ixi,Iyi,It i)tと、この画像ブロックの移動ベクトルw=(u,v,1)tとのなす角をθとする。
【0028】
gi=(Ixi,Iyi,Iti)tの(u,v,1)方向への投影成分の大きさをηiとすれば、次式で表される。
【0029】
Ηi=|gi|cosθ
=|gi|(git・w)/{|w||gi|}
=(git・w)/|w|
=(Ix i,Iy i,It i)・(u,v,1)t/|(u,v,1)|
=(Ix i u+Iy i v+It i)/√(u2+v2+1) ・・・ (12)
ηiの平均をη、分散をDとする。
η=(1/N)Σηi
=(1/N)Σ(git・w)/|w|=(1/N)/|w|Σ(git・w)
=(1/N)Σ(Ixi u+Iyi v+Iti)/√(u2+v2+1)|
=(1/N){1/√(u2+v2+1)|}Σ(Ixi u+Iyi v+Iti) ・・・ (13)
D=(1/N)Σ(ηi−η)2
=(1/N)/|w|Σ{(git・w)−(1/N)Σ(git・w)}2
=(1/N)Σ[(Ixi u+Iyi v+Iti)/√(u2+v2+1)−(1/N)Σ(Ixi u+Iyi v+Iti)/√(u2+v2+1)]2
=[1/(u2+v2+1)][(1/N)Σ(Ixiu+Iyiv+Iti)2−{(1/N)Σ(Ixiu+Iyi v+Iti)}2]
=(1/|w|2)[(1/N)Σ( git・w)2−{(1/N)Σgit・wi}2]
=[1/(u2+v2+1)][(1/N)E−{(1/N)Σgit・w}2]
=[1/(u2+v2+1)][(1/N)E−{(1/N)Σ(Ixi u+Iyi v+Iti)}2]
=(1/N)(1/|w|2){E−(1/N)(Σgit・w)2}
拘束式(5)の左辺をεiとすると、εi=git・wであるから、
D=(1/|w|2)[(1/N)Σ(εi)2−{(1/N)Σεi}2] ・・・ (14)
→{(ε2乗の平均)−(ε平均の2乗)}÷(移動ベクトルの大きさ)
Nは画像ブロック内の輝度勾配ベクトルの総数を表す(i=1,2,・・,N)。式(14)の平均に関する項={(1/N){Σεi}}2≒0とみなして、次式で近似してもよい。
【0030】
D=(1/|w|2)[(1/N)Σ(εi)2
=(1/N)E/(u2+v2+1) ・・・ (15)
3×3輝度勾配共分散行列Aの三番目の固有値λ3に対応する固有ベクトルはξ3であるが、移動ベクトルwとほぼ同じ向きを持っている。従って、固有ベクトルξ3上の分散を意味する固有値λ3は、移動ベクトルw上に定義される分散とほぼ等しい。
【0031】
λ3≒D ・・・ (16)
上記処理は、高々2次の処理であるので、演算が容易で、また、適当な桁数の固定小数点処理の実施が容易である。
【0032】
λ'1,λ'2算出部16は、輝度勾配共分散行列Aを受けて、3×3共分散行列Aの固有値の固有値λ1,λ2の擬似的な値をもつλ'1,λ'2を、2×2共分散行列から算出する。式(5)において、t方向輝度勾配ベクトルIt=0とすると、
【数4】
を解くことで、λ'1,λ'2を求めることができる。λ'1,λ'2は、厳密には3次元で定義された固有値λ1,λ2とは若干異なるが、輝度勾配ベクトルのエッジ成分の分布を表しており、動きベクトルの信頼性評価には実用的に使用できる。実施例1ではλ1≒λ'1,λ2≒λ'2として出力する。
【0033】
この実施形態では、動きベクトルを算出するために、3次元で定義された固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用し、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、2次固定方程式による計算を行うことで演算量を少なくして時間内処理を可能とするとともに、固有値λ1,λ2に近似のλ'1,λ'2を代用していることから精度の高い動きベクトルの算出の実現することができる。
【0034】
(第2の実施形態)
図4は、動きベクトル算出装置に関する第2の実施形態について説明するための概略的なシステム構成図である。
【0035】
この実施形態は、第1の実施例のλ'1、λ'2算出部16で算出された固有値λ’1,λ’2を補正するための補正部17を追加したものである。補正部17は、λ'1,λ'2算出部16から2×2固有値λ’1,λ'2を受け、動きベクトル(u,v)を受け、3×3固有値λ1,λ2を算出する。そして後述するように、下記補正を行う。
【0036】
λ1=√(1+|m|2cos2φ)λ'1 ・・・ (19)
λ2=√{1+|m|2(1−cos2φ)}λ'2 ・・・ (20)
ただし、2×2固有値をλ'1,λ'2とし、λ'1に対応する固有ベクトルをξ’1とする。また、
cos2φ=(mt・ξ'1)2/(|m|2|ξ'1|2) ・・・ (21)
m=(u,v)t , |m|2=u2+v2
図5の3×3固有値と2×2固有値の説明図を用いて、補正の詳細について説明する。輝度勾配共分散行列Aの3次元固有ベクトルξ1,ξ2,ξ3を考える。
【0037】
画像に動きがない場合、It=0であるから、固有ベクトルξ1,ξ2の平面はIx,Iy平面と一致し、固有ベクトルξ3軸とIt軸は一致する。動きのある状態において、図5に示すようにξ3軸とIt軸に傾きθが発生し、同時に固有ベクトルξ1,ξ2平面とIx,Iy軸平面とに傾きθが発生する。この回転軸をβ軸,βと直行する軸をα軸とする。
【0038】
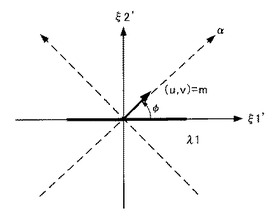
図6に固有ベクトルξ1',ξ2'の平面を示す。動きがあるとIt≠0となり、β軸を回転軸としてξ座標系はθ回転をする。このとき移動ベクトルは(u,v,1)になる。固有ベクトルξ1,ξ2を平面Ix,Iyに投影した座標をξ1',ξ2'とする。動きベクトルmと固有ベクトルξ1'とのなす角度をφとすると、
cosφ=mt・ξ1'/(|m||ξ1'|) ・・・ (22)
動きがある場合においても角度φを一定として、固有ベクトルξ1上の分散である固有値λ1をα方向λ1α、β方向λ1βに分解する。
【0039】
λ1α=λ1cosφ ・・・ (23)
λ1β=λ1sinφ ・・・ (24)
このλ1α,λ1βをIx,Iyとし、平面に投影したものをλ'1α,λ'1βとすると、
λ1αcosθ=λ'1α ・・・ (25)
λ1β=λ'1β ・・・ (26)
ただし、Ix,Iy平面においてλ’とすると
λ'1α=λ'1cosφ ・・・ (27)
λ'1β=λ'1sinφ ・・・ (28)
角度θを動きベクトルmで表すと
cosθ=1/√(1+|m|2) ・・・ (29)
から、
1/cosθ=√(1+|m|2) ・・・ (30)
式(25),(26)は次のように変形され
λ1α=√(1+|m|2)λ'1α ・・・ (31)
λ1β=λ'1β ・・・ (32)
従って、
λ12=λ1α2+λ1β2 ・・・ (33)
=(1+|m|2)λ'1α2+λ'1α2
=(1+|m|2)λ'12cos2φ+λ'12sin2φ
λ12=(1+|m|2cos2φ)λ'12
λ1 =√(1+|m|2cos2φ)λ'1 ・・・ (34)
同様にλ2について求めると、
λ22=λ2α2+λ2β2
=(1+|m|2sin2φ)λ’22
={1+|m|2(1−cos2φ)}λ'22
λ2 =√{1+|m|2(1−cos2φ)}λ'2 ・・・ (35)
ただし、cos2φ=(mt・ξ'1)2/(|m|2|ξ'1|2) ・・・ (36)
m=(u,v)t , |m|2=u2+v2
となり、固有値λ'1,λ'2および固有ベクトルξ'1は、It=0とみなした2×2の輝度勾配ベクトルの共分散行列の固有値および固有ベクトルξ'1として求めることができる。
【数5】
【0040】
式(36)の2×2の輝度勾配ベクトルの共分散行列から、固有値λ'1,λ'2および固有ベクトルξ'1を求める。固有値算出は2次方程式の解を求めることであり、固有ベクトルは2元1次方程式を解くことに帰着する。加えて、別途動きベクトルm=(u,v)tを求める。式(34)−(36)を用いて、λ'1,λ’2,ξ'1,u,vから固有値λ1、λ2を求めることができる。
【0041】
この説明ではφを定義するにあたり、固有ベクトルξ1'を用いて説明したが、固有ベクトルξ2'を用いても同様に扱えることは明らかである。このときφをπ/2−φで置き換えてやればよい。
【0042】
この実施形態では、3次固定方程式を用いないで計算を行うことで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させる効果に加え、静止画として見なして2次方程式で求めた固有値λ'1,λ'2に対し、動きベクトルから動いた角度を推定し、固有値λ'1,λ'2に補正をかけたことにより、動きベクトルの算出精度をより向上させることが可能となる。
【0043】
いくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、組み合わせ、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0044】
12 ブロック抽出部
13 輝度勾配共分散行列算出部
14 動きベクトル算出部
15 λ3算出部
16 λ'1、λ'2算出部
17 補正部
【技術分野】
【0001】
この発明の実施形態は、動画像の画像ブロック毎の動きベクトルを算出する動きベクトル算出装置に関する。
【背景技術】
【0002】
従来、画像ブロック内の画像内容の性質に応じて画像ブロックサイズの増減を行い、時空間輝度勾配(差分)ベクトル分布に対応した適正な画像ブロックサイズを用いた動き量の推定を行うことで、より正確な動き量の推定を行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−51788号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術で動きベクトル算出処理を行う場合は、3×3の輝度勾配共分散行列の固有値を算出し、この固有値から固有ベクトルを算出していることから、高い信頼度の動きベクトルの評価が可能である。
【0005】
しかし、3×3行列の固有値を求めることは、3次方程式の解を求めることである。この場合、数値演算処理として初期値を設定し、反復演算によって所要精度まで繰り返すニュートン法や2分法等が用いられる。固有値は3個存在するので、この数値演算も3回必要である。画像はブロックに分割処理され、ブロック毎にこの演算を行い、動画像信号なので毎フレーム処理が行われ、全体システムとして膨大な演算量が必要となる。加えて、3次式において飽和せずしかも微小値が丸めで切り捨てられないためには浮動小数点処理あるいは膨大な桁数の固定小数点処理が必要となる。このような演算を実行するために必要な例えば1/30秒以内とするには演算時間が間に合わない、という問題があった。
【0006】
この実施形態では、動画像の画像ブロック毎の動きベクトルを算出する演算量を低減した動きベクトル算出装置を提供する。
【課題を解決するための手段】
【0007】
実施形態によれば、画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)[(1/N)Σεi2−{(1/N)Σεi}2]とする。
【0008】
また、画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)(1/N)Σεi2とする。
【0009】
さらに、映像信号から抽出された画像ブロックの全ての画素から水平、垂直、時間の輝度勾配ベクトルの共分散行列(3×3)を算出する輝度勾配共分散行列算出部と、前記輝度勾配ベクトルの共分散行列(3×3)の要素から動きベクトルを算出する動きベクトル算出部と、前記輝度勾配ベクトルの共分散行列(3×3))の三番目に大きい固有値λ3を算出する第1の算出部と、前記輝度勾配ベクトルの共分散行列(3×3)の時間方向の勾配ベクトルを0としたときの輝度勾配ベクトルの共分散行列(2×2)の一番目に大きい固有値λ'1、次に二番目に大きい固有値λ'2を算出する第2の算出部と、を備える。
【図面の簡単な説明】
【0010】
【図1】動きベクトル算出装置に関する第1の実施形態について説明するための概念的な回路構成図である。
【図2】ある画像ブロック内の各輝度勾配ベクトルと同画像ブロックの移動ベクトルのなす角度θについて説明するための説明図である。
【図3】輝度勾配ベクトルの分布の概念について説明するための説明図である。
【図4】動きベクトル算出装置に関する第2の実施形態について説明するための概略的なシステム構成図である。
【図5】3×3固有値と2×2固有値について説明するための説明図である。
【図6】図5の固有ベクトルξ1',ξ2'を平面上で説明するための説明図である。
【発明を実施するための形態】
【0011】
以下、実施形態について、図面を参照しながら詳細に説明する。なお、以下で説明する図面で、同一機能を有するものは同一符号を付け、その繰り返しの説明は省略する。
【0012】
(第1の実施形態)
図1は、動きベクトル算出装置に関する第1の実施形態について説明するための概念的な回路構成図である。
【0013】
図1に示す動きベクトル算出装置は、動画像の映像信号が入力される入力端子11、映像信号の画像ブロックの位置・サイズ情報を抽出するブロック抽出部12、M×N画像ブロックの全ての画素から水平x、垂直y、時間tの輝度勾配ベクトルの共分散行列3×3が算出される輝度勾配共分散行列算出部13、輝度勾配ベクトルの3×3共分散行列から動きベクトルを算出する動きベクトル算出部14、輝度勾配ベクトルの3×3共分散行列の三番目に大きい固有値λ3を算出するλ3算出部15、輝度勾配ベクトルの3×3共分散行列の一番目に大きい固有値λ1,次に二番目に大きい固有値λ2の擬似的な値をもつ、2×2共分散行列の一番目に大きい固有値λ'1,次に二番目に大きい固有値λ'2を算出するλ'1,λ'2算出部16から構成される。
【0014】
図1において、入力端11に入力された映像信号は、ブロック抽出部12に供給され、ここで指定された指定された位置(x,y)およびサイズM×Nの画像ブロックが抽出される。画像ブロック位置(水平x,垂直y)は、ブロック位置情報に基づき指定される。画像ブロックのサイズM,Nは、予め指定された縦方向及び横方向の画素数である。ブロック抽出部12は供給された動画像の異なる時間t,t+t1 ,t+t2 ,…の画像の画像ブロックを抽出する。抽出された画像ブロックは、次段の輝度勾配共分散行列算出部13に供給される。
【0015】
輝度勾配共分散行列算出部13に映像信号が入力され、映像信号の3方向(水平x、垂直y、時間t)の輝度勾配ベクトルが算出され、このx,y,tの各方向の差分値をIx,Iy,Itと表記する。
【0016】
Ix:x方向の輝度勾配ベクトル(x方向差分値)
Iy:y方向の輝度勾配ベクトル(y方向差分値)
It:t方向の輝度勾配ベクトル(t方向差分値)
また、輝度勾配共分散行列算出部13は、以下に示す処理を行い、3×3輝度勾配共分散行列Aを算出する。ある画像ブロック内の各画素の輝度勾配ベクトルを次式で表す。
【0017】
輝度勾配ベクトルgi=(Ix,Iy,It)t ・・・ (1)
ある画像ブロックの全てのN画素についての和を、Σで表し、輝度勾配ベクトルgi=(Ix,Iy,It)tから輝度勾配共分散行列Aが定義される。
【数1】
【0018】
輝度勾配共分散行列算出部13において算出された輝度共分散行列Aの成分は、動きベクトル算出部14に入力される。動きベクトル算出部14では、輝度共分散行列Aの成分から動きベクトルm=(u,v)tを算出する。
【0019】
次に、動きベクトルmの算出動作を説明する。公知のように、微小時間において映像(輝度)信号は変化しないという条件から、次式に示す勾配法による動きベクトルの拘束式が得られる。
【0020】
Ix u+Iy v+It=0 ・・・ (4)
ただし、uは動きベクトルmのx成分、vは動きベクトルmのy成分とする。同時に、動きベクトル(u,v)を3次元へ拡張したベクトルである移動ベクトルをw=(u,v,1)tと定義する。基本拘束式(4)は輝度勾配ベクトルgi=(Ix,Iy,It)tと移動ベクトルをw=(u,v,1)tを用いて次式で表される。
【0021】
git・w=(Ix,Iy,It)(u,v,1)t=0 ・・ (5)
ここで、輝度勾配ベクトルgi=(Ix,Iy,It)tの分布の概念を図3に示す。
【0022】
次に、評価関数Eを定義する。
【0023】
E=Σ(git・w)2
=Σ{(Ix i,Iy i ,It i)(u,v,1)t}2 ・・・ (6)
=Σ(Ix u+Iy v+It)2 ・・・ (7)
=Σix2u2+Σiy2v2+Σit2+ΣIx Iy uv+ΣIxIt u+ΣIyIt v ・・・(7)
式(7)明らかなように、各係数は式(3)の輝度勾配ベクトルの共分散行列成分として表される。
【0024】
a11=Σix2,a22=Σiy2,a33=Σit2,a12=ΣIxIy,a13=ΣIxIt,a23=ΣIyIt
評価関数Eの極値を与えるuvを求める。
【0025】
∂E/∂u=Σix2 u+ΣixIy v+ΣIxIt=0 ・・・ (8)
∂E/∂v=Σiy2 v+ΣixIy u+ΣIyIt=0 ・・・ (9)
行列表記すれば、
【数2】
式(8),(9)あるいは(10)の係数は、輝度勾配共分散行列Aの成分として表記することができ、
【数3】
輝度共分散行列Aの成分を係数とした2元1次方程式に帰着するので、単純な四則演算で解u,vを求められる。動きベクトルm=(u,v)t、移動ベクトルw=(u,v,1)tが決定される。この(u,v)を式(7)へ代入して評価関数Eの極値が得られる。
【0026】
次に、λ3算出部15は、動きベクトル算出部14から動きベクトルm=(u,v)と輝度勾配共分散行列算出部13から輝度共分散行列Aの成分を受けて、輝度勾配共分散行列Aの三番目の固有値λ3を算出する。
【0027】
図2に示すように、ある画像ブロック内の各輝度勾配ベクトルgi=(Ixi,Iyi,It i)tと、この画像ブロックの移動ベクトルw=(u,v,1)tとのなす角をθとする。
【0028】
gi=(Ixi,Iyi,Iti)tの(u,v,1)方向への投影成分の大きさをηiとすれば、次式で表される。
【0029】
Ηi=|gi|cosθ
=|gi|(git・w)/{|w||gi|}
=(git・w)/|w|
=(Ix i,Iy i,It i)・(u,v,1)t/|(u,v,1)|
=(Ix i u+Iy i v+It i)/√(u2+v2+1) ・・・ (12)
ηiの平均をη、分散をDとする。
η=(1/N)Σηi
=(1/N)Σ(git・w)/|w|=(1/N)/|w|Σ(git・w)
=(1/N)Σ(Ixi u+Iyi v+Iti)/√(u2+v2+1)|
=(1/N){1/√(u2+v2+1)|}Σ(Ixi u+Iyi v+Iti) ・・・ (13)
D=(1/N)Σ(ηi−η)2
=(1/N)/|w|Σ{(git・w)−(1/N)Σ(git・w)}2
=(1/N)Σ[(Ixi u+Iyi v+Iti)/√(u2+v2+1)−(1/N)Σ(Ixi u+Iyi v+Iti)/√(u2+v2+1)]2
=[1/(u2+v2+1)][(1/N)Σ(Ixiu+Iyiv+Iti)2−{(1/N)Σ(Ixiu+Iyi v+Iti)}2]
=(1/|w|2)[(1/N)Σ( git・w)2−{(1/N)Σgit・wi}2]
=[1/(u2+v2+1)][(1/N)E−{(1/N)Σgit・w}2]
=[1/(u2+v2+1)][(1/N)E−{(1/N)Σ(Ixi u+Iyi v+Iti)}2]
=(1/N)(1/|w|2){E−(1/N)(Σgit・w)2}
拘束式(5)の左辺をεiとすると、εi=git・wであるから、
D=(1/|w|2)[(1/N)Σ(εi)2−{(1/N)Σεi}2] ・・・ (14)
→{(ε2乗の平均)−(ε平均の2乗)}÷(移動ベクトルの大きさ)
Nは画像ブロック内の輝度勾配ベクトルの総数を表す(i=1,2,・・,N)。式(14)の平均に関する項={(1/N){Σεi}}2≒0とみなして、次式で近似してもよい。
【0030】
D=(1/|w|2)[(1/N)Σ(εi)2
=(1/N)E/(u2+v2+1) ・・・ (15)
3×3輝度勾配共分散行列Aの三番目の固有値λ3に対応する固有ベクトルはξ3であるが、移動ベクトルwとほぼ同じ向きを持っている。従って、固有ベクトルξ3上の分散を意味する固有値λ3は、移動ベクトルw上に定義される分散とほぼ等しい。
【0031】
λ3≒D ・・・ (16)
上記処理は、高々2次の処理であるので、演算が容易で、また、適当な桁数の固定小数点処理の実施が容易である。
【0032】
λ'1,λ'2算出部16は、輝度勾配共分散行列Aを受けて、3×3共分散行列Aの固有値の固有値λ1,λ2の擬似的な値をもつλ'1,λ'2を、2×2共分散行列から算出する。式(5)において、t方向輝度勾配ベクトルIt=0とすると、
【数4】
を解くことで、λ'1,λ'2を求めることができる。λ'1,λ'2は、厳密には3次元で定義された固有値λ1,λ2とは若干異なるが、輝度勾配ベクトルのエッジ成分の分布を表しており、動きベクトルの信頼性評価には実用的に使用できる。実施例1ではλ1≒λ'1,λ2≒λ'2として出力する。
【0033】
この実施形態では、動きベクトルを算出するために、3次元で定義された固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用し、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、2次固定方程式による計算を行うことで演算量を少なくして時間内処理を可能とするとともに、固有値λ1,λ2に近似のλ'1,λ'2を代用していることから精度の高い動きベクトルの算出の実現することができる。
【0034】
(第2の実施形態)
図4は、動きベクトル算出装置に関する第2の実施形態について説明するための概略的なシステム構成図である。
【0035】
この実施形態は、第1の実施例のλ'1、λ'2算出部16で算出された固有値λ’1,λ’2を補正するための補正部17を追加したものである。補正部17は、λ'1,λ'2算出部16から2×2固有値λ’1,λ'2を受け、動きベクトル(u,v)を受け、3×3固有値λ1,λ2を算出する。そして後述するように、下記補正を行う。
【0036】
λ1=√(1+|m|2cos2φ)λ'1 ・・・ (19)
λ2=√{1+|m|2(1−cos2φ)}λ'2 ・・・ (20)
ただし、2×2固有値をλ'1,λ'2とし、λ'1に対応する固有ベクトルをξ’1とする。また、
cos2φ=(mt・ξ'1)2/(|m|2|ξ'1|2) ・・・ (21)
m=(u,v)t , |m|2=u2+v2
図5の3×3固有値と2×2固有値の説明図を用いて、補正の詳細について説明する。輝度勾配共分散行列Aの3次元固有ベクトルξ1,ξ2,ξ3を考える。
【0037】
画像に動きがない場合、It=0であるから、固有ベクトルξ1,ξ2の平面はIx,Iy平面と一致し、固有ベクトルξ3軸とIt軸は一致する。動きのある状態において、図5に示すようにξ3軸とIt軸に傾きθが発生し、同時に固有ベクトルξ1,ξ2平面とIx,Iy軸平面とに傾きθが発生する。この回転軸をβ軸,βと直行する軸をα軸とする。
【0038】
図6に固有ベクトルξ1',ξ2'の平面を示す。動きがあるとIt≠0となり、β軸を回転軸としてξ座標系はθ回転をする。このとき移動ベクトルは(u,v,1)になる。固有ベクトルξ1,ξ2を平面Ix,Iyに投影した座標をξ1',ξ2'とする。動きベクトルmと固有ベクトルξ1'とのなす角度をφとすると、
cosφ=mt・ξ1'/(|m||ξ1'|) ・・・ (22)
動きがある場合においても角度φを一定として、固有ベクトルξ1上の分散である固有値λ1をα方向λ1α、β方向λ1βに分解する。
【0039】
λ1α=λ1cosφ ・・・ (23)
λ1β=λ1sinφ ・・・ (24)
このλ1α,λ1βをIx,Iyとし、平面に投影したものをλ'1α,λ'1βとすると、
λ1αcosθ=λ'1α ・・・ (25)
λ1β=λ'1β ・・・ (26)
ただし、Ix,Iy平面においてλ’とすると
λ'1α=λ'1cosφ ・・・ (27)
λ'1β=λ'1sinφ ・・・ (28)
角度θを動きベクトルmで表すと
cosθ=1/√(1+|m|2) ・・・ (29)
から、
1/cosθ=√(1+|m|2) ・・・ (30)
式(25),(26)は次のように変形され
λ1α=√(1+|m|2)λ'1α ・・・ (31)
λ1β=λ'1β ・・・ (32)
従って、
λ12=λ1α2+λ1β2 ・・・ (33)
=(1+|m|2)λ'1α2+λ'1α2
=(1+|m|2)λ'12cos2φ+λ'12sin2φ
λ12=(1+|m|2cos2φ)λ'12
λ1 =√(1+|m|2cos2φ)λ'1 ・・・ (34)
同様にλ2について求めると、
λ22=λ2α2+λ2β2
=(1+|m|2sin2φ)λ’22
={1+|m|2(1−cos2φ)}λ'22
λ2 =√{1+|m|2(1−cos2φ)}λ'2 ・・・ (35)
ただし、cos2φ=(mt・ξ'1)2/(|m|2|ξ'1|2) ・・・ (36)
m=(u,v)t , |m|2=u2+v2
となり、固有値λ'1,λ'2および固有ベクトルξ'1は、It=0とみなした2×2の輝度勾配ベクトルの共分散行列の固有値および固有ベクトルξ'1として求めることができる。
【数5】
【0040】
式(36)の2×2の輝度勾配ベクトルの共分散行列から、固有値λ'1,λ'2および固有ベクトルξ'1を求める。固有値算出は2次方程式の解を求めることであり、固有ベクトルは2元1次方程式を解くことに帰着する。加えて、別途動きベクトルm=(u,v)tを求める。式(34)−(36)を用いて、λ'1,λ’2,ξ'1,u,vから固有値λ1、λ2を求めることができる。
【0041】
この説明ではφを定義するにあたり、固有ベクトルξ1'を用いて説明したが、固有ベクトルξ2'を用いても同様に扱えることは明らかである。このときφをπ/2−φで置き換えてやればよい。
【0042】
この実施形態では、3次固定方程式を用いないで計算を行うことで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させる効果に加え、静止画として見なして2次方程式で求めた固有値λ'1,λ'2に対し、動きベクトルから動いた角度を推定し、固有値λ'1,λ'2に補正をかけたことにより、動きベクトルの算出精度をより向上させることが可能となる。
【0043】
いくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、組み合わせ、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0044】
12 ブロック抽出部
13 輝度勾配共分散行列算出部
14 動きベクトル算出部
15 λ3算出部
16 λ'1、λ'2算出部
17 補正部
【特許請求の範囲】
【請求項1】
画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、
前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)[(1/N)Σεi2−{(1/N)Σεi}2]とする、動きベクトル算出装置。
【請求項2】
前記輝度勾配ベクトルの共分散行列の三番目に大きい固有値λ3を、前記移動ベクトル方向の分散Dと等しくした、請求項1記載の動きベクトル算出装置。
【請求項3】
画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、
前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)(1/N)Σεi2とする、動きベクトル算出装置。
【請求項4】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列の三番目に大きい固有値λ3を、前記移動ベクトル方向の分散Dと等しくした、請求項3記載の動きベクトル算出装置。
【請求項5】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列のItを0としたときに、2×2輝度勾配ベクトルの共分散行列の一番目に大きい固有値λ1、次に二番目に大きい固有値λ2に近似する固有値λ1',λ2'を算出し、前記3×3輝度勾配ベクトルの共分散行列の固有値λ1,λ2と固有値λ1',λ2'を近似させた、請求項1または3記載の動きベクトル算出装置。
【請求項6】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列のItを0としたときに、2×2輝度勾配ベクトルの共分散行列の一番目に大きい固有値λ1と次に二番目に大きい固有値λ2に近似する固有値λ1',λ2'および固有値λ1'に対応する固有ベクトルξ1’を算出し、cos2φ=(m・ξ'1)2/(|m|2|ξ'1|2[ただし、φは動きベクトルmと固有ベクトルξ1'とのなす角]とし、λ1=√(1+|m|2cos2φ)λ'1、λ2=√{1+|m|2(1−cos2φ)}λ'2と補正し、前記3×3輝度勾配ベクトルの共分散行列を固有値λ1,λ2とした、請求項1または3記載の動きベクトル算出装置。
【請求項7】
映像信号から抽出された画像ブロックの全ての画素から水平、垂直、時間の輝度勾配ベクトルの共分散行列(3×3)を算出する輝度勾配共分散行列算出部と、
前記輝度勾配ベクトルの共分散行列(3×3)の要素から動きベクトルを算出する動きベクトル算出部と、
前記輝度勾配ベクトルの共分散行列(3×3))の三番目に大きい固有値λ3を算出する第1の算出部と、
前記輝度勾配ベクトルの共分散行列(3×3)の時間方向の勾配ベクトルを0としたときの輝度勾配ベクトルの共分散行列(2×2)の一番目に大きい固有値λ'1、次に二番目に大きい固有値λ'2を算出する第2の算出部と、を備える動きベクトル算出装置。
【請求項1】
画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、
前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)[(1/N)Σεi2−{(1/N)Σεi}2]とする、動きベクトル算出装置。
【請求項2】
前記輝度勾配ベクトルの共分散行列の三番目に大きい固有値λ3を、前記移動ベクトル方向の分散Dと等しくした、請求項1記載の動きベクトル算出装置。
【請求項3】
画素数Nをもつある画像ブロック内にあって、該画像ブロック内の各画素の輝度勾配ベクトルをgi=(Ix,Iy,It)t[ただし、Ixはx(水平)方向の輝度勾配ベクトル、Iyはy(垂直)方向の輝度勾配ベクトル、Itはt(時間)方向の輝度勾配ベクトル]、前記画像ブロック内の移動ベクトルをw=(u,v,1)tとし、εi=git・wとしたとき、評価関数E=Σεi2の極値を与えるu,vとして、動きベクトルm=(u,v)を算出する動きベクトル算出装置において、
前記動きベクトルmを3次元へ拡張した移動ベクトル方向の分散を、D=(1/|w|2)(1/N)Σεi2とする、動きベクトル算出装置。
【請求項4】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列の三番目に大きい固有値λ3を、前記移動ベクトル方向の分散Dと等しくした、請求項3記載の動きベクトル算出装置。
【請求項5】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列のItを0としたときに、2×2輝度勾配ベクトルの共分散行列の一番目に大きい固有値λ1、次に二番目に大きい固有値λ2に近似する固有値λ1',λ2'を算出し、前記3×3輝度勾配ベクトルの共分散行列の固有値λ1,λ2と固有値λ1',λ2'を近似させた、請求項1または3記載の動きベクトル算出装置。
【請求項6】
前記輝度勾配ベクトルの共分散行列を3×3とし、該共分散行列のItを0としたときに、2×2輝度勾配ベクトルの共分散行列の一番目に大きい固有値λ1と次に二番目に大きい固有値λ2に近似する固有値λ1',λ2'および固有値λ1'に対応する固有ベクトルξ1’を算出し、cos2φ=(m・ξ'1)2/(|m|2|ξ'1|2[ただし、φは動きベクトルmと固有ベクトルξ1'とのなす角]とし、λ1=√(1+|m|2cos2φ)λ'1、λ2=√{1+|m|2(1−cos2φ)}λ'2と補正し、前記3×3輝度勾配ベクトルの共分散行列を固有値λ1,λ2とした、請求項1または3記載の動きベクトル算出装置。
【請求項7】
映像信号から抽出された画像ブロックの全ての画素から水平、垂直、時間の輝度勾配ベクトルの共分散行列(3×3)を算出する輝度勾配共分散行列算出部と、
前記輝度勾配ベクトルの共分散行列(3×3)の要素から動きベクトルを算出する動きベクトル算出部と、
前記輝度勾配ベクトルの共分散行列(3×3))の三番目に大きい固有値λ3を算出する第1の算出部と、
前記輝度勾配ベクトルの共分散行列(3×3)の時間方向の勾配ベクトルを0としたときの輝度勾配ベクトルの共分散行列(2×2)の一番目に大きい固有値λ'1、次に二番目に大きい固有値λ'2を算出する第2の算出部と、を備える動きベクトル算出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−92980(P2013−92980A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−236036(P2011−236036)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
[ Back to top ]