
動き補償画像レートコンバータに係るシステムおよび方法
【課題】時間的に隣接するフレーム対間のグローバル動きおよびローカル動きを推定して、これら動きベクトルを適用して、フレーム間に補間、および動き補償されたフレームを生成するシステムおよび方法を提供する。
【解決手段】グローバルアフィン動き推定エンジン、グローバル並進動き推定エンジン、セグメンテーションマスクジェネレータ、オブジェクトエッジ強さマップジェネレータ、およびローカル動き推定エンジンを含む動き補償フレームレートコンバータについての設計を有する。これらフィーチャの組み合わせを、動き補償画像レートコンバータに実装して、フレームシーケンスの動き推定および補償を正確且つ効率的に行う。
【解決手段】グローバルアフィン動き推定エンジン、グローバル並進動き推定エンジン、セグメンテーションマスクジェネレータ、オブジェクトエッジ強さマップジェネレータ、およびローカル動き推定エンジンを含む動き補償フレームレートコンバータについての設計を有する。これらフィーチャの組み合わせを、動き補償画像レートコンバータに実装して、フレームシーケンスの動き推定および補償を正確且つ効率的に行う。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、米国連邦法典35セクション119(e)に基づき2006年6月27日出願の米国仮出願番号第60/817,061の恩恵を享受しており、この出願の開示の全体をここに参照として組み込む。
【背景技術】
【0002】
典型的な映画は、24Hz、25Hz、または30Hzで記録される。通常のビデオカメラの画像レートは、50Hzおよび60Hzである。これらに対して、市販のテレビディスプレイは、120Hzまでの画像レートを有し、順次走査またはインターレース走査いずれかを利用する。故に、ハイエンドのTVディスプレイを用いて放送ビデオをインタフェースしようとすると、例えば画像レートコンバータなどを用いて放送ビデオの本来のシーケンスをアップコンバートする必要がある。画像レートコンバータの動作は典型的に、低周波数のソースであるデバイスからのフレームシーケンスが高周波のあて先ディスプレイに登録される前の時間インスタンスで画像フレームを補間する、というものである。
【0003】
単純な画像レートコンバータにおいては、画像はしばしば、次の画像がソースであるデバイスから届くまでの間、あて先のディスプレイにおいて繰り返されるので、動きが生じると、ぼけ(blur)および激しい振動(judder)を生じる場合がしばしばある。動き推定回路および動き補償回路を画像レートコンバータで利用すると、これら望ましくない効果を低減し、動画シーケンスを高性能に変換することができる。動き補償は、補間された画像のエレメントがどこにあるかを、該エレメントの動きの方向および速度に基づいて推定することで行われる。その後、方向および速度の値は、動きベクトルとして表され、エレメントを新たに補間したフレームの正しい位置に「動かす」のに利用される。この手法を適切に適用することで、動きを伴う任意の画像シーケンスへの影響は一目瞭然であり、生成画像はアップコンバージョン前の本来のシーケンスと見分けがつかないまでになる。
【0004】
故に、動き補償された画像レート変換に伴う計算コストを最小限に抑え、その推定精度を最大化する方法およびシステムを決定することが望ましい。例えば、様々な動き補償法を、動き補償効率性と、結果生じる補間されたフレームの精度との間の平衡を保つべく、ソースであるフレームのシーケンス内の異なる領域に対して設計および適用してよい。さらに、この効率性と精度との間の平衡を達成すべく動き補償法自身を個々に最適化してよい。加えて、動き補償画像レートコンバータのシステムアーキテクチャ全体を、該アーキテクチャを様々なディスプレイデバイスに準拠させることで、汎用性を高めるよう設計することができる。
【発明の開示】
【0005】
本発明は、入力信号の時間的に隣接するフレーム対間のグローバル動きおよびローカル動きを推定して、これら動きベクトルを適用して、これら隣接するフレーム間に補間、および動き補償されたフレームを少なくとも1枚生成するシステムおよび方法に関する。
【0006】
本発明の一側面によると、動き補償画像レートコンバータ(MCPRC)を提供して、入力信号の連続フレーム間のオブジェクト動きを推定する。先ず、信号をMCPRCの処理モジュールで処理して、フレームの重要な領域を隔離する。そして、MCPRCの動き補償フレームレートコンバータ(MCFRC)を利用して、アフィン動きパラメータ一式を利用して任意の二つの連続フレーム間のグローバル動きを推定する。さらに、MCFRCは、動きベクトル一式を利用してフレーム間のローカル動きを推定し、ここで、各動きベクトルはローカル動きベクトルまたは補正グローバル動きベクトルのいずれかである。
【0007】
一実施形態においては、MCFRCは、2段処理によりアフィン動きパラメータ一式を生成するグローバルアフィン動き推定エンジンを含む。特に、グローバル並進推定・アフィン予測モジュールを提供して、パラメータをアフィンパラメータリファインモジュールでリファインする前に、粗いレベルのパラメータ推定を生成してよい。
【0008】
一実施形態においては、MCFRCのローカル動き補正モジュールを利用して、参照フレームの対象領域に隣接する隣接領域を特定することで、現在のフレームの対象領域について動きベクトルを生成する。対象領域の動きベクトルは、その後、参照フレームについて計算した隣接領域の動きベクトルに基づいて計算されうる。結果生じる動きベクトルは、ローカル動きベクトルである。
【0009】
一実施形態においては、MCFRCのローカル動き補正モジュールを利用して、対象領域に隣接する隣接領域について計算したアフィン動きパラメータに基づいて、現在のフレームの対象領域について動きベクトルを生成する。結果生じる動きベクトルは、補正グローバル動きベクトルである。
【0010】
一実施形態においては、エッジマスクとセグメンテーションマスクとの組み合わせを利用して、現在のフレームの前景領域を決定して、ローカル動きベクトルまたは補正グローバル動きベクトルのいずれかを利用して動き補償を行う。これら2つのベクトル間の選択は、二つのベクトルの各々を対象領域に適用した結果生成される推定エラーに基づいて行われてよい。
【0011】
本発明の別の側面においては、グローバルアフィン動き推定エンジンのグローバル並進・推定モジュールを提供して、現在のフレームと参照フレームとの間のグローバル並進動きを推定する。このモジュールは、フレーム間のグローバル並進動きを粗く推定するアフィンパラメータ一式を生成する位相相関技術の利用により、動作する。位相相関技術では、先ず、特定のデシメーションファクタにより、現在のフレームおよび参照フレームそれぞれをディメーションする。結果生じるデシメーションされた現在のフレームおよび参照フレームは、その後フーリエ変換される。変換された現在のフレームに対応する位相は、その後、変換された参照フレームに対応する位相から減算されて、位相差アレイが生成される。この位相差アレイの指数をその後、逆フーリエ変換して、相関面を生成する。相関面の最大値および相関面における最大値の位置を利用して、グローバル並進動きに関するアフィンパラメータを計算してよい。
【0012】
この粗いレベルの推定から生成されるアフィンパラメータは、さらに、グローバルアフィン動き推定エンジンのアフィンパラメータリファインモジュールでリファインされる。このモジュールは、先ず粗いレベルの推定から得られたアフィンパラメータを利用して参照フレームを更新することに基づくリファイン技術を利用する。その後、更新された参照フレームと現在のフレームとの間の差を求めて、これをアフィンパラメータリファインに利用して、更新された参照フレームと現在のフレームとの間の差を最小限に抑える。
【0013】
本発明の別の側面によると、MCFRCのローカル動き補正モジュールが提供され、現在のフレームの対象領域の動きベクトルを計算する。このモジュールにおいて行われる計算は、グローバルアフィン動き推定モジュールから求めたグローバルアフィン動きパラメータ一式に基づく。特に、アフィンパラメータを利用してセグメンテーションマスクを生成することで、現在のフレームの前景領域および背景領域を特定する。そして、オブジェクトエッジ強さマップを生成して、現在のフレーム上の大きなエッジ強さを有する領域を特定する。続いて、対象領域に関する前景領域、背景領域、および大きなエッジ強さを有する領域に基づいて現在のフレームの対象領域について適切な動き推定法を選択する。
【0014】
一実施形態においては、動き推定法は、補正グローバル動き推定法およびローカル動き推定法のいずれかである。
【0015】
一実施形態においては、セグメンテーションマスクは、先ず、アフィンパラメータを利用して参照フレームを更新することで生成される。そして、更新された参照フレームと現在のフレームとの間の差異フレームを求める。差異フレームの各領域を、その後、閾値と比較して、この領域を前景領域および背景領域のいずれかに分類する。
【0016】
一実施形態においては、このセグメンテーションマスクは、さらに第2処理でリファインされて、最終セグメンテーションマスクが生成される。この処理は、先ず、少なくとも2つの接続された領域を有する最初のセグメンテーションマスク上のオブジェクトを決定することを含む。その後、各特定されたオブジェクトが占める面積を数量化する。続いて、各数量化された面積を閾値と比較して、オブジェクトの接続された領域各々を、前景領域および背景領域のいずれかに再分類する。
【0017】
一実施形態においては、先ず、現在のフレームの各領域の垂直方向および水平方向に相関する1以上の固有値を生成することで、オブジェクトエッジ強さマップを生成する。固有値の最大値を次に決定する。最大値が画定する範囲に実質的に在る固有値を有する各領域を、重要なエッジ強さを有するものとして分類する。
【0018】
一実施形態においては、メジアンフィルタ、エッジフィルタ、およびガウスフィルタのうち少なくとも1つを、対象領域について生成された動きベクトルに適用する。
【0019】
一実施形態においては、各々グローバルアフィン動きベクトル、ローカル動きベクトル、または補正グローバル動きベクトルである、MCFRCで生成された動きベクトルを利用して、現在のフレームと参照フレームとの間に動き補償されたフレームを補間する。
【0020】
本発明の別の側面によると、MCPRCは、MCFRCの出力信号を処理する後処理モジュールを含み、ここで出力信号は、入力信号の本来のフレームレートより高いフレームレートを有する。
【0021】
一実施形態においては、後処理モジュールは、処理モジュールとMCFRCとの間に配置され、処理モジュールからの信号をさらに処理する。加えて、後処理モジュールの出力信号を、入力信号の本来のフレームレートと略等しいフレームレートを有するよう適合させる。
【0022】
一実施形態においては、処理モジュールは、ノイズ低減およびデインターレースの少なくともいずれかを行う回路を有する。後処理モジュールは、フレーム画像スケーリング、強調および色管理の少なくともいずれかを行う回路を有する。
【図面の簡単な説明】
【0023】
【図1】本発明による、動き補償画像レートコンバータ(MCPRC)回路の一例示的実施形態を示す。
【0024】
【図2】本発明によるMCPRCの別の例示的実施形態を示す。
【0025】
【図3】図1および2の動き補償フレームレートコンバータ(MCFRC)モジュールの例示的ブロック図を示す。
【0026】
【図4】図3のグローバルアフィン動き推定機能の例示的ブロック図を示す。
【0027】
【図5】図4のグローバル並進推定機能の例示的実装例を示す。
【0028】
【図6】図4の高速フーリエ変換(FFT)機能の例示的実装例を示す。
【0029】
【図7】図5の位相計算機能の例示的ブロック図を示す。
【0030】
【図8】最初のセグメンテーションマスクを計算する例示的ブロック図を示す。
【0031】
【図9】最終のセグメンテーションマスクを計算する例示的ブロック図を示す。
【0032】
【図10】オブジェクトエッジマップを計算する例示的ブロック図を示す。
【0033】
【図11】図10の固有値計算機能の例示的ブロック図を示す。
【0034】
【図12】ローカル動き補償法および補正グローバル動き法を実装する例示的な方法を示す。
【0035】
【図13】フレーム対の間に動きベクトルを生成するのに適切な動き補償法を選択する例示的なフロー図を示す。
【0036】
【図14】図13の手順から計算されるローカル動きベクトルを後処理する例示的ブロック図を示す。
【0037】
【図15】図3の動き補償補間機能の例示的ブロック図を示す。
【0038】
【図16A】開示された技術を利用することのできる例示的高精細テレビのブロック図を示す。
【0039】
【図16B】開示された技術を利用することのできる例示的車両のブロック図を示す。
【0040】
【図16C】開示された技術を利用することのできる例示的携帯電話機のブロック図を示す。
【0041】
【図16D】開示された技術を利用することのできる例示的セットトップボックスのブロック図を示す。
【0042】
【図16E】開示された技術を利用することのできる例示的メディアプレーヤのブロック図を示す。
【発明を実施するための最良の形態】
【0043】
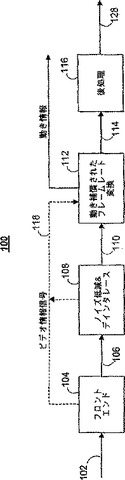
図1は、本発明の一側面による、動き補償画像レートコンバータ(MCPRC)回路100の高レベル図である。入力信号102は、ビデオフレームの離散シーケンスを有しており、MCPRC回路100に入力され、MCPRC回路は、アップコンバートされ動き補償された出力信号128を、MCPRC回路100のモジュール104、108、112、および116を介して生成する。MCPRC回路100の各モジュールを以下で説明する。アップコンバートの後、MCPRC回路100からの出力信号128は入力信号102のフレームレートより典型的に非常に高いフレームレートを有する。例えば、入力ビデオ信号102は、60Hzの画像レートを有するビデオカメラから生成されてよい。ビデオ信号は、例えば120Hzのリフレッシュレートを有するLCDパネルディスプレイ上の出力に適した形にすべく、MCPRC回路100を利用してアップコンバートされる必要がありうる。一般的には、フレームレートのアップコンバートは、所定の数の固有フレームを時間的に隣接した入力フレームの各対間に注入することで達成される。これらの介在フレームは、フレーム間のオブジェクトの動作軌跡を実質的に捉えるように作成されてよく、これによりアップコンバートの後でディスプレイされる際のビデオ画像シーケンス全体の滑らかさを高める。
【0044】
図1を参照すると、入力信号102は先ずフロントエンドモジュール104でダウンコンバートおよび復調処理を受ける。このフロントエンドモジュール104は、チューナ、デモジュレータ、コンバータ、コーデック、アナログビデオデコーダ等の部材を含みうる。フロントエンドモジュール104からの出力106は、その後、下流のノイズ低減およびデインターレースモジュール108へ渡され、そこでは、信号106を、本来のインタレース走査に基づく形式から、高品質な順次走査出力110へ変換し、且つ、ブロックノイズおよびモスキートノイズなどのアナログノイズおよび補償アーチファクトを大幅に低減させる。結果生じる順次走査出力110は動き補償されたフレームレート変換(MCFRC)モジュール112へ供給され、そこでは動き補償され補間されたフレームを生成してビデオ出力シーケンス114が生成される。ビデオ出力シーケンス114は、元々の入力信号102の本来のフレームレートより高いフレームレートを有してよい。MCFRCモジュール112の動作の詳細を以下で詳述する。アップコンバートされたビデオ出力114は、その後、後処理モジュール116により処理され、典型的にデジタルビデオパイプラインに存在するスケーリング、エッジ強さ、色管理、画像制御などの追加的な強化機能がビデオ信号114に授受される。
【0045】
幾らかの実施形態においては、図1に示す全MCPRCアーキテクチャが単一のチップ上に実装されてもよい。一つの例示的構造においては、このMCPRCチップはテレビ回路に組み込まれてもよく、テレビ回路から、MCPRCチップのアップコンバートおよび後処理された出力128が外部のビデオディスプレイパネルへ送信される。しかし、後処理モジュール116が処理パイプラインから切り離され、その代わりにディスプレイパネルに組み込まれている場合、MCPRCシステム100の利用性が厳しく制限されることになる。これは、チップからLCDディスプレイに送信される際、信号114が入力信号102の本来のフレームレートより非常に高い帯域幅を占めるからである。多くの場合、テレビ回路がLCDディスプレイと通信できるような、整合高帯域幅インタフェースを見つけることはできない。しかし、MCPRCアーキテクチャ100を単一チップにカプセル化すると、システム100の様々な部材間で情報交換が促進されるという利点がある。
【0046】
図2は、別のMCPRC構成200の高レベル図であり、図1のMCFRCブロック112および後処理モジュール116の順序を入れ替えて、ビデオを図2のMCFRCモジュール212で高い帯域幅にアップコンバートする処理よりも、後処理モジュール216の処理のほうを前に行う。アップコンバート機能を処理パイプラインの最後の段階に配置することで、アップコンバート機能が残りの回路と隔離されうる。故に、この配置により、モジュール204、208、および216をMCFRCモジュール212から切り離すことができる。幾らかの実施形態においては、モジュール204、208、216、および212は、図1のそれぞれ対応するモジュール104、108、116、および112と構造的に類似している。一例示的アーキテクチャにおいては、モジュール204、208、および216を組み込むチップが、テレビ受信回路に集積されて、入力信号202の本来のフレームレートで動作してよく、一方でMCFRCモジュール212が、他の処理部から切り離されたLCDディスプレイパネル内に集積されてもよい。この配置においては、テレビ回路からLCDディスプレイパネルへの送信信号214は、LCDパネルディプレイが要するアップコンバート帯域幅より比較的低い本来の帯域幅を占める。テレビ受信回路はLCDディスプレイと、低電圧差動信号(LVDS)チャネルなどの標準的なビデオ/ディスプレイインタフェースを介して通信する機能を有してよい。この低帯域幅のインタフェースにより、システム200の用途は広がり、任意の数の異なるディスプレイパネルをテレビ受信回路に接続することが可能となる。
【0047】
図1、2に示すビデオ情報信号経路118および218はそれぞれ、対応するMCPRCシステム100および200のモジュール間の情報伝達を促進すべく提供されている。特に、MCFRCモジュール112および212に伝達される情報は、例えば、クローズドキャプションディプレイの位置、画面上の表示の存在、各入力信号102および202の本来のフレームレート、および各入力信号102および202の起点およびアクティブビデオ境界を含む。
【0048】
図示されているMCPRCシステム100および200では、入力ビデオ信号102および202は、標準精細(NTSC/PAL/SECAM)から高精細に亘っており、インタレース型でも順次型でもよい。幾らかの例においては、ビデオ信号解像度は、低フレームレートを有する標準解像度よりもさらに低い。例えば、入力ビデオ信号は、iPODなどの携帯型メディアプレーヤ内のコネクタデバイスから、毎秒15または30フレーム入力されるQVGA(320×240)であってよい。幾らかの例においては、低解像度ビデオ信号がパーソナルメディアプレーヤまたはマルチメディア携帯電話機のビデオドックにコネクタデバイスを介して供給されてよく、ここでドックには、例えば5fpsで320×160から60fpsで720×480の空間・時間変換(spatial and temporal conversion)を行う機能を有する集積回路が含まれうる。インタフェース入力は、ビデオに起因する(video‐originated)、またはフィルムに起因する(film‐originated)材料から形成されてよい。ビデオに起因する材料は、先ずデインタレースされて、フィールドレートからフレームレートへ変換されてからMCFRCモジュール112および212に入力される。フィルムに起因する材料は、MCFRCモジュール112および212への入力用に、本来の順次型形式に変換される。
【0049】
図3は、オブジェクト動き推定を入力ビデオ信号302の連続フレーム対の間に行うことを目的とする、図1および2のMCFRCモジュール112および212それぞれの例示的実装例300を示す。連続フレームの各対は補間されてよく、2つのフレームのうち前のほうは、「参照フレーム」と称され、後のほうは「現在のフレーム」と称される。図3のMCFRCモジュール300の例示的実施形態によると、動き推定エンジン306による動き補償および動き補償補間モジュール310による動き補間の前処理として、入力信号302はMCRFC制御部304で処理される。特に、動き推定エンジン306は、MCFRC制御部304からリンク322および324を介して送信された処理済フレーム情報を利用して、グローバルおよびローカル動き補償情報を入力シーケンス302の連続フレーム対各々に生成する。結果生じるグローバルおよびローカル動き補償情報は、今度は動き補償補間モジュール310へリンク308を介して転送され、また、MCFRC制御部304へもリンク322および324を介して転送される。幾らかの例においては、動き補償補間を行うという判断も、ビデオ入力信号302と、ビデオ情報信号316を介して得た入力の任意の追加的ビデオ情報とともに、制御部304から動き補償補間モジュール310に送られてよい。MCFRC制御部304および動き推定エンジン306から取得したデータに基づいて、動き補償補間を動き補償補間モジュール310で行うことで、望ましいフレームレートのビデオ画像シーケンスを生成するが、ここでシーケンスには、元々のビデオフレームシーケンスの間に時間的に散在した補間されたフレームが含まれている。幾らかの例においては、MCFRC制御部304は制御信号を、リンク326を介して動き補償補間モジュール310へ送ることで、ビデオ信号の一部の補間を不要としてよい。さらに、動き推定エンジン306からのビデオフレーム情報、ビデオ情報信号316、およびビデオ入力302も、出力314を介して他の処理ブロックへ転送されてさらなる処理を受けてよい。動き推定エンジン306、動き補償補間モジュール310、およびMCFRC制御部304の動作を、以下で詳述する。
【0050】
図3のMCFRC制御部304は、動き予測および後続のビデオ補間の品質に影響しうるある種のフレームフィーチャを削除しようと試みることで、入力ビデオ信号302の各フレームを処理する。この信号処理は、「真の」画像のみがグローバル動き推定の基として利用されるべきグローバルアフィン動き推定機能モジュール318において特に重要である。例えば、入力ビデオ信号302が、郵便ポスト(pillar box)およびサブタイトルなどのフィーチャを含むDVDである場合、MCFRC制御部304は、フレームを動き推定エンジン306に送る前に、各DVDフレームからピラーボックスを削除し、且つ、サブタイトルがフレームと融合している領域を特定することが望ましい。入力信号302が放送ビデオ信号である場合、MCFRC制御部304は、各ビデオフレームに関連付けられた静的チャネルロゴおよびティッカシンボルを特定することが望ましいが、このティッカシンボルとは、フレームの残りのシーンとはしばしば完全に反対方向に一定の速度で回転するものである。処理されたフレームシーケンスは、その後、リンク322および324を介して動き推定エンジン306へ転送されて、ローカルおよびグローバル動き推定がなされる。
【0051】
別の実施形態においては、入力ビデオ信号302および入力ビデオ信号302に関する追加的情報が、入力316および330をそれぞれ介してMCFRC制御部304へ送信される。特に、ビデオ情報信号316は、例えばビデオに追加されるべき合成情報または動きベクトルの推定精度に影響するようなビデオの起点情報などの、入力ビデオ信号302に関する追加的情報を提供する。例えば、入力信号がコンピュータグラフィック信号であることが既知である場合、該信号は、ビデオに起因する信号と比して、水平方向、垂直方向両方に非常に鋭い遷移を持つ可能性が高い。グラフィックに起因するビデオ入力に関する動きベクトルは典型的に、ひとたびこの情報が動き推定エンジン306に提供されると、より正確に推定できる。しかし、ビデオ起点が動き推定エンジン306に提供されない場合、結果生じる動きベクトルの予測は不正確となってしまう。
【0052】
また別の実施形態によると、「シーンカット」検知回路を提供して、ビデオ信号内の特定のフレームについては動き補償補間モジュール310をディセーブルにすべきか否かを判断してよい。動き補償補間システムを利用することで、シーンが変更される間正確な動き推定を行うことが可能となる。故に、結果生じるアップコンバートされたビデオシーケンス内でこれら悪影響で大きい場合にはいつでも、入力信号302の動き補償補間を停止することができる。この一時的に補間を停止する判断は、動き推定エンジン306からリンク322および324を介して受信されたグローバルおよびローカル動き情報の分析に基づいてMCFRC制御部304で行われうる。MCFRC制御部304は、通信リンク326を介して動き補償補間モジュール310をイネーブルにもディセーブルにもできる。補間するという判断がなされると、MCFRC制御部304は、チャネル330から入力ビデオ信号302を、チャネル316からオプションのビデオ情報信号を、リンク322からグローバル動き信号を、およびリンク324からローカル動き信号を、動き補償補間モジュール310へ転送して、動き補償補間に備える。さもなくば、情報は出力314を介して後続の段に選択的に転送される。MCFRC制御部304では任意の他の基準を利用して動き補償補間をイネーブルおよびディセーブルにしてもよいことに留意されたい。
【0053】
図4は、図3の動き推定エンジン306のグローバルアフィン動き推定モジュール318の例示的実装例400である。グローバルアフィン動きとは、一般的には、一般にカメラのズーミング、パニング、あるいは回転などの動きが引き起こす、ビデオシーケンスの背景のピクセルの動きのことを言う。幾らかの実装例においては、ビデオフレームシーケンスの背景のピクセルは、全て単一の共通グローバル動きを受けると仮定される。グローバルアフィン動き推定は、通常、背景の動きを幾らかの基本パラメータを利用してモデル化する。特に、アフィンモデルは、6つのアフィンパラメータのみを利用して、任意のフレーム対間のグローバル動き軌跡を表す。アフィンパラメータのうち2つは、カメラのズーミング動きを捉えるのに利用されるスケーリングパラメータであり、2つは回転パラメータであり、2つはパニング動きを捉えるのに利用される並進パラメータである。これら6つのアフィンパラメータは、グローバル動き予測の上で非常な柔軟性を提供する。
【0054】
図4に示すように、グローバルアフィン動き推定モジュール400は2段の処理であり、第1段402が、任意のフレーム対間のグローバル動きを粗い解像度で捉えるのに利用されるアフィンパラメータ一式の粗い推定を行う。より具体的には、第1段は、位相相関法を利用してグローバル並進動きに関する2つのアフィン並進パラメータを推定するが、これは図5‐7との関連で詳述する。第1段はさらに、グローバルな回転およびスケーリング動きに関する、残りの4つのアフィンパラメータを予測する。これら予測は、前のフレーム対など、過去に行った推定から算出した対応アフィン値に基づいている。結果生じるアフィンパラメータを今度は第2段406に渡し、より高精細な解像度レベルにまでリファインする。
【0055】
特に、図4の実施形態によると、フレームシーケンスを有するアクティブビデオ入力信号404を、グローバルアフィン動き推定モジュール400の段402に供給する。幾らかの実施形態においては、サブタイトル、OSDメニューなど全ての重要でないビデオ情報を、グローバルアフィン動き推定モジュール400へ供給する前のアクティブビデオ入力信号404から除去する。段402においては、グローバル並進またはパニング動きに関する、2つのアフィン並進パラメータのみを推定する。グローバル並進動きを隔離する理由は、カメラの動きはその性質上圧倒的に並進的な動きであり、典型的に大きな並進範囲を捉えるのが難しいからである。殆どの市販の動き推定ツールは、非常に制限的な計測範囲を有しており、動きが許容範囲外である場合にはしばしば不正確な動き計測値を生成するきらいがある。これと比較すると、本発明のグローバル並進推定技術によれば、入力フレームの1画像サイズの半分の並進動き範囲まで正確に計測することができる。このグローバル並進推定は、粗い表示フレームの各対に対して適用した位相相関法を利用して達成される。位相相関法は図5との関連で詳述する。2つの粗い予測アフィン並進パラメータを含む粗い並進推測値数1がモジュール402により提供される。さらに、2つのアフィン回転パラメータと2つのアフィンスケーリングパラメータとを含む4つの残りのアフィンパラメータの粗い推定値である数2が、前のフレームのこれらパラメータの過去の推定値に基づいて計算される。
【数1】

【数2】
【0056】
これら粗いレベルのアフィンパラメー推定値数1および数2はその後、RANSAC(RANdom SAmple Consensus)に基づくアフィンパラメータリファインモジュール406へ送信され、さらにリファインされる。このリファインは、先ず、段402からの粗く予測されたアフィンパラメータを利用して参照フレームの画像を動き補償することで達成される。故に、補償された参照フレームと現在のフレームとの間の差は、補償された参照フレーム画像を現在のフレーム画像に実質的に位置合わせするのに必要な、粗く予測されたアフィンパラメータの調節量である。一実施形態においては、RANSACに基づく技術を利用してこのようなリファインを達成する。このRANSACに基づく方法406は先ず、その最も精細な解像度で表される現在のフレームから、所定の数のランダムに配置されたピクセルブロックを選択することで動作する。これらブロックも、補償された参照フレーム内に対応するブロックを有する。次にセグメンテーションマスクを動き補償された現在のフレームに適用して、フレーム画像の前景領域および背景領域を区別する。フレームの背景領域に属するブロックのみを利用して、グローバル動き予測に関するアフィンパラメータをリファインする。こうする理由は、背景のピクセルの動きだけが、アフィンパラメータにより概算されるグローバル動きに曝されると仮定されるからである。リファインされた並進推定値A<SUB>i</SUB>および予測推定値であるB<SUB>i</SUB>はその結果アフィンパラメータリファイン段406で生成される。セグメンテーションマスク算出を以下に詳述する。
【0057】
図5は、位相相関法の例示的ブロック図実装500を示す。位相相関法は、図4のグローバル並進推定および予測段402に実装されて、2つの連続フレーム間のグローバル並進動きに関するアフィンパラメータの粗いレベルの予測を行う。位相相関は、どちらもフーリエ領域で表される並進画像とその参照画像との間に位相差のみが存在するようなフーリエシフト特性を利用することで、この並進動きを計測する。さらには、この位相差の指数の逆フーリエ変換により、相関面が形成され、ここから2つの画像フレーム間の並進動きの計測値が得られる。この動作を表す例を以下で説明する。
【0058】
標準解像度のテレビ画像のフーリエ変換は、殆どの用途において法外に高価になってしまうことが公知である。この動作の複雑性を低減すべく、参照フレームと現在のフレームとを、これら画像がフーリエ変換前に所定のファクタによりダウンサンプリングされた、粗い解像度レベルで表す。このダウンサンプリングは、図5に示す、水平方向および垂直方向両方で各画像をデシメーションするデシメーションモジュール502を介して達成される。一実施形態においては、画像のデシメーションは多相を分離可能なフィルタ法を利用して達成される。結果生じるデシメーションされた画像フレームが、垂直方向および水平方向両方で各々高速フーリエ変換(FFT)される。2DのFFTは、2つの連続する1DのFFTを行うことで達成され、デシメーションされた画像は典型的に、列方向のFFTをモジュール506により受ける前に行方向のFFTをモジュール504により受ける。参照フレームおよび現在のフレームに対応するFFT結果は各々2Dの複素数データアレイで表され、一時的なデータ記憶用にメモリ508に配置される。続いて、2D位相差アレイが、2つの複素数データアレイから生成される。次に、位相差アレイのエレメントについての指数(element-wise exponential)をとって、1Dの列IFFT514の後に1D行IFFT512により2D逆高速フーリエ変換(IFFT)された行列を生成する。これら列514および行512のIFFT中に、メモリブロック516を一時的なデータ記憶用に利用してもよい。このような2DのIFFTから、2Dデータアレイでも表される正規化相関面を次に出力518に生成して、最大計算モジュール520に供給する。最大計算モジュール520は、相関面アレイの最大の値および位置、且つ最大値に隣接する値の幾らかを決定することで動作する。最後に、サブピクセル補間モジュール522を利用して、最大値およびそれに隣接する値を補間して、グローバル並進推定値を生成する。2DのFFTの詳細および位相差計算を以下で説明する。
【0059】
図5の各フーリエ変換の出力は複素数の2Dアレイである。結果生じる動き推定の精度には有限精度計算による数量化効果が直接関与するので、各複素数の浮動小数点を記憶するのに必要となりうるビット数は注意深く考慮されねばならない。一実施形態においては、192ビットの浮動小数点FFTをモジュール504で利用して、行FFTを実装し、128ビットの浮動小数点FFTをモジュール506で利用して、列FFTを実装する。図6は、例示的な256×256ビットの2DのFFT設計600を示す。設計600の各工程で利用される例示的なビット精度も提供される。行FFT実装は実質的に列FFTと同一でありえるが、1DのFFTにより1方向に変換された後の入力フレームは転置され(90度回転される)、同様に、同じ1DのFFTを利用して第2の方向に変換される。2DのFFTも、2つの実質的に同一な1DのIFFTを利用して同様に実装されうる。
【0060】
図7は、図5の位相差計算モジュール510の例示的ブロック図700である。2つの複素数データアレイ内の対応するエレメントから得られた複素数の値の対を、例示的な位相差計算モジュール700へ入力702および710として供給する。図7に示す一実施形態においては、入力702および710がそれぞれ、フーリエ領域のデシメーションされた参照画像フレームおよび現在の画像フレームを表す二つの複素数データアレイから取られる。入力702および710の実数部分および虚数部分を分離して分ける。複素数入力702および710と関連する位相を、入力信号の虚数部分および複素数部分の商から、アークタンルックアップテーブル706および714それぞれを用いて、処理704および712で得られた商の大きさにそれぞれ基づいて、決定する。直交補正モジュール708および716でリファインされた後、二相は加算器718で互いから減算され、位相差718が生成される。同様に、この処理を、現在のFFTデータアレイおよび参照FFTデータアレイの対応するエレメントの全ての対に対して行って、位相差の2Dアレイを生成してよい。
【0061】
図5‐7の例示的実装例によるグローバル動き推定を行った後で、アフィン動き値をグローバル動き補償の適切なピクセルに対して割り当ててよい。フレームの前景に属するピクセルは、例えばセグメンテーションマスクなどの利用により、背景に属するものと区別される必要がある。背景に属するピクセルは、前述の6つのアフィンパラメータで概算される単一のグローバル動きを受けることが仮定されてよい。これに対して前景のピクセルは、同じグローバル動きでは動かない。このようなピクセルに対しては、適切なローカル動きベクトルまたは補正グローバル動きベクトルを決定してよい。
【0062】
図8は、セグメンテーションマスクの最初の版を計算する例示的方法を示す。例示により、グローバル補償フレーム802および本来のフレーム804がシステム800への入力として供給される。そして、ピクセル毎の、2つの入力フレーム間の絶対値の差を、加算器処理805および絶対値処理806で計算する。結果生じるピクセル毎の絶対値の差のアレイを、合算・比較モジュール808に供給して、絶対値の差をピクセルブロック毎に加算して、閾値807と比較する。絶対値のブロック合算値が閾値より大きい場合にピクセルブロック全体がフレームの前景に属すものとして分類されうる。さもなくば、ブロックはフレームの背景に属すものとして分類されうる。モジュール808はフレーム内に各ピクセルブロックの単一のビットバイナリ出力を生成して、この情報を提供し、これら出力の集合体が、潜在的にフレーム内の前景ブロックと背景ブロックとを区別するセグメンテーションマップ809を形成する。ノイズおよび隔離動き領域の存在により、セグメンテーションマップ809は誤って分類されたブロック領域を含みうる。故に、セグメンテーションマップ809は、拡張(dilation)812の後の閉路(closing)810などのバイナリ形態素処理を受け、より同質な最初のセグメンテーションマスク814を生成する。
【0063】
図9は、図8の処理から得た最初のセグメンテーションマスク902に基づき最終のセグメンテーションマスクを計算する例示的方法900を示す。セグメンテーションマスク902は、適切な補償法を画像フレームの個々のピクセルに適用しうるマップを提供する。システム900は、最初のセグメンテーションマスク902から様々な接続されたオブジェクトを検出することで動作し、ここからピクセルが再分類されて特定の補正処置を受けてよい。一実施形態においては、接続された部材分析904をモジュール904で利用して、接続されたオブジェクトを特定する。特に、二つのオブジェクトを幾らかのピクセルのみで分離した場合、小さなオブジェクトを大きなオブジェクトの一部としてみることができる。図9の実施形態においては、2×2の解像度ブロックサイズが接続された部材分析で利用されて、オブジェクト接続特定のコスト全体を低減する。しかし、他の解像度サイズも可能である(例えば3×3、4×4)。接続部材分析の最後には、モジュール904は最初のセグメンテーションマスク902から全ての接続オブジェクトを特定するラベルリストを出力するが、ラベルリストにおいて各オブジェクトはフレーム内の該オブジェクトの位置を特定するインデックスに対応している。インデックスおよびラベルのリストは、オブジェクトごとのエッジブロックの数を計算するモジュール906に供給される。オブジェクト内のブロック数を所定の閾値912と比較することで、オブジェクトが小さいと判断される場合、オブジェクトのブロックを、画像フレームの背景に属すものとして分類する。これら背景ブロックは、上述のグローバルアフィン動き推定パラメータを利用して補償されてよい。しかし、1つのオブジェクトに関するブロック数が多い場合、これらブロックは画像フレームの前景に属すものとして分類されることがあり、グローバル動き補償法よりも正確でありうるローカル動き補正法を施される。
【0064】
本発明の別の側面によると、入力フレームについてオブジェクトエッジマップのロバストな生成手順を提供して、該フレーム内で大きなエッジ強さ(significant edge strength)を有するオブジェクトを特定することができる。オブジェクトに関するエッジ強さの欠如は、該オブジェクトとその直ぐ周辺との間にコントラストが弱いことを示す。故に、該オブジェクトがたとえセグメンテーションマスクが示すよう入力フレームの前景に存在したとしても、該オブジェクトのピクセルに対してはグローバル動き補償を適用してよい。これは、より正確な補償法を、エッジ強さが小さいオブジェクトに適用することで生じる結果が、グローバル動き補償法を適用することで生じるものと同一である可能性が高く、且つ、グローバル動き補償法が二つの方法のよりコスト効率のよい可能性が高いからである。故に、計算効率のためには、ロバストなオブジェクトエッジマップ生成法を提供して、エッジが強いオブジェクトを検知してよい。この方法によると、任意の画像フレーム内のピクセルブロック全てについて、2つの固有値が生成され、該固有値はそれぞれブロックの水平方向の計測値および垂直方向の計測値に対応する。例えば、SDTV解像度標準を2×2のブロックサイズについて利用すると仮定すると、各SDTV画像フレームについて、全部で360個のブロックが水平方向に、且つ288個のブロックが垂直方向に生成されることになる。全ての固有値の最大値(ev_max)をその後決定する。固有値が、最大値により計測される所定の範囲にあるこれらブロックは、例えば、範囲「0.8*ev_max,ev*max」内にあり、大きなエッジ強さを有するものとして特定されてよく、故に、グローバル動き補正法よりもより厳密な動き補償を要する可能性が高い。これらブロックは値1を割り当てられ、値0を割り当てられうる残りのブロックから区別されてよい。この結果、1のブロックが1画像フレーム内の大きなエッジ強さを有するオブジェクトを明示するようなオブジェクトエッジマップが生成される。さらには、1および0のブロックの利用により、このオブジェクトエッジマップ自身がかなりノイズに対して強くなる。本実施形態では2×2のブロックサイズを利用したが、任意の他のブロックサイズを利用することもできる(例えば4×4)。
【0065】
図10は、入力フレーム1002内の各ピクセルブロックに関する固有値の対を計算する処理1000を示す。各固有値は、そのブロックの垂直方向および水平方向の計測値に対応しており、ルマ(luma)または強度領域で表されるそのブロックのピクセル値から計算される。5×5のブロックサイズの利用を仮定すると、フレーム1002のピクセル強度は、先ず5×5のウィンドウサイズを有する2次元ガウスフィルタ1004でフィルタにかけられる。ガウスフィルタ1004にかける主な目的は、ノイズを平滑化して、各ブロック内の小さなオブジェクトを隔離して、それらを固有値算出の候補から除くことにある。これは、大きなエッジ強さを有する大きなオブジェクトのみに対してこのより厳密な補償処置を行うほうがコスト効率がよいからである。ブロックサイズが5×5であるガウスフィルタについては、各々がサイズ720×8ビットである4つのラインバッファを利用してこのようなフィルタサイズをサポートしてよい。これらラインバッファはSRAM内に実装できる。別の実施形態においては、ガウスフィルタ1004は、シリコン領域の利用を最小限にとどめるべく、より小さなブロックサイズ(例えば3×3)を利用してもよい。この結果、ラインバッファハードウェアのサイズが、5×5のブロックサイズに比較して、50%低減できる。
【0066】
ガウスフィルタ1004でフィルタされた2Dの強度値アレイ1005は、アレイ1005の強度値の勾配を推定すべく、勾配処理モジュール1006に供給される。一実施形態において、勾配は、アレイ1005の隣接する強度値間の一次差(first order difference)を求めることに基づいて、水平方向および垂直方向両方において、計算される。この一次差計算は、ブロック毎に行われてよい。例えば、2×2のブロックのデータアレイ1005を例にとって考えるが、みて分かるように、この例では、ブロックがA、B、D、およびEという強度値からなり、強度CおよびFが右側で隣接しており、GおよびHが底側で隣接している。
【数3】
ブロックの水平方向および垂直方向の一次差の勾配は以下のように計算される。
【数4】
同じ勾配計算を、入力フレーム1002の2Dデータアレイ1005の2×2ブロック全てに適用してよいので、水平方向の勾配値アレイ1008および垂直方向の勾配値アレイ1010の生成は、両方ともスクエアリング回路1012に供給される。これら入力勾配アレイに基づいて、スクエアリング回路1012は、以下のアレイ出力1014、1015、1016、および1018を生成する。
【数5】
ここで、*はドット積演算を示す。式2の3つの出力各々も、同じサイズを勾配値アレイ1008および1010として有する2Dデータアレイである。これら3つの出力アレイ1014、1016、および1018はその後2D平均値計算モジュール1020に送られさらなる処理を受ける。
【0067】
2次元平均値計算モジュール1020は、ブロック毎に、各入力アレイ1014、1016、および1018の2乗勾配値を平均化して、アレイのブロック毎にスカラー平均値を生成することで動作する。例えば、2×2ブロックサイズを利用する場合、各ブロックの4つの勾配値が平均化されて、単一のスカラー値を生じる。この結果、数6で表される平均2乗勾配値の3つの2Dアレイ1022、1024、および1026がモジュール1020から生成される。
【数6】
各2Dアレイは、画像全体の全てのスカラー値を含むよう適合される。これら3つの平均2乗勾配アレイは、その後固有値計算モジュール1030へ供給されて、そこで2つn固有値を、入力フレーム1002の各ピクセルブロックに、数6のアレイに基づいて生成する。
【0068】
図11は、図10の固有値計算モジュール1030の例示的実装1100を示す。示されているように、数7のアレイは数8のアレイから加算器1102で減算され、差行列Rを生成する。この差行列は、その後、処理1104でエレメントごとに2乗されて、数9のアレイがエレメントごとの2乗処理1108および4つの乗算のファクタを受けた後で、数9のアレイに加算器1106で加算される。
【数7】
【数8】
【数9】
結果生じる合計行列1106は、またも処理1110でエレメントごとに2乗され、行列Sが生成される。そして固有値アレイE<SUB>v1</SUB>およびE<SUB>v2</SUB>は、以下のように計算されうる。
【数10】
ここで、アレイE<SUB>v1</SUB>およびE<SUB>v2</SUB>の各エレメントは、図10に示す入力画像フレーム1002のピクセルブロックそれぞれに相関する固有値である。これら固有値を利用して、大きなエッジ強さを有するこれらピクセルを特定するオブジェクトエッジマップの決定に利用されてよく、故に、ローカル動き推定の候補である。
【0069】
図10および11に示す実施形態においては、2×2のブロックサイズを固有値の計算に利用した。しかし、これより大きなブロックサイズを利用してハードウェア利用を低減することもできる。さらには、より小さなブロックサイズを利用することで推定の精度を上げることもできる。さらには、各固有値が正、小数点、および0から1の間で変化することから、8ビット精度を利用して固有値を表すことで、数値の観点からは十分な精度が得られることがある。しかし、他の精度値を利用することもできる。
【0070】
まとめると、セグメンテーションマスク計算処理を、図8および9に関して記載した。結果生じるセグメンテーションマスクを利用して、画像フレームの前景および背景に属すオブジェクトを特定することができる。加えて、図10および11に関して、オブジェクトエッジマップ生成処理を上述した。これにより得られるオブジェクトエッジマップを利用すると、大きなエッジ強さを有するフレームのオブジェクトを隔離することができる。セグメンテーションマスクおよびオブジェクトエッジマップの組み合わせにより、動き推定精度および効率性両方を最大化するような、画像フレームのサブ領域への適用に適した補正技術を決定することができる。概して、1フレーム内の各ピクセルブロックは、該ブロックの前景/背景分類およびそれらが示すエッジ強さに基づいて、3つの種類の動き補償のいずれかを経る。これら3つの種類とは、グローバル動き補償、補正グローバル動き補償、およびローカル動き補償である。前景の各ブロックは、図9で生成されたもののようなセグメンテーションマスクにより特定され、画像フレームのオブジェクトエッジマップが決定するローカル動き補償または補正グローバル動き補償を施される。フレームの背景のブロックも、セグメンテーションマスクによる特定が可能であり、図4‐7の処理で得られたグローバルアフィンパラメータを利用してグローバル動き補償を施される。この補償法種別選択処理およびローカルおよび補正グローバル動き補償法を以下で詳述する。
【0071】
図12は、2つのピクセルブロック間の動きを捉えるローカル動きベクトルの導出に利用される技術の例示的実施形態を示しており、ここで1つのブロックは参照フレーム内にあり、他のブロックは現在のフレーム内にある。ブロック対は、それらの隣接するブロックの動きに対する、自身の動きに基づいて検出されうる。例えば、動き検出は、相関するブロック対間の動きが、隣接するブロック間の均一なグローバル動きの方向とは異なる、という観察に基づいて行われてよい。図12に示された実施形態によると、3×3のブロック配置1200の中心のブロック1205を、ローカル動きベクトルを推定する現在のフレームの対象ブロックとして選択する。現在のフレーム処理の時間tにおいては、ブロック1205は4つの隣接するブロック1201‐1209を、それぞれブロック1205からみた北、東、南、および西に有する。さらに、現在のフレームは、現在のフレームの前の時間t‐1において処理される、時間的に隣接する参照フレームを有する。この参照フレームは、現在のフレームのブロック1201‐1209と1対1の関係にある一式のブロックを含む。現在のフレームのブロック1205の動きベクトルは、その後、前のフレームのブロック1201‐1204について時間t‐1に計算されたグローバル動きベクトルから概算することができる、というのも、中心のブロックの動きは、隣接するブロックのものと僅かにしかずれていないと仮定できるからである。時間t+1における後続のフレームでは、各ブロック1206‐1209の動きベクトルを、時間tに計算されたその北、南、西、および東に隣接するブロックの動きから推定する。故に、フレームシーケンスの動きの値は、隣接する値に基づいて、画像シーケンスのフレームがそれぞれ時間的に進むにつれて、連続的にリファイン(refine)されていくことになる。
【0072】
図12も、本発明の別の側面による補正グローバル動き補償法を示すのに利用される。この補正グローバル動き補償法は、グローバル動き補償が、ブロックの動きを推定するには十分な精度を持たない場合に利用される可能性が高い。故に、グローバルアフィンパラメータに小さな補正を行って、生じる精度を向上させねばならない。また図12の実施形態を参照すると、3×3のブロック配置1200の中心のブロック1205を、ブロック1205からそれぞれ北、東、南、および西に位置する4つの隣接するブロック1201‐1209を有する現在のフレーム上の対象ブロックとして選択する。補正グローバル動き補償を決定した現在のフレームのグローバル動き補償版を決定しうる。このグローバル動き補償された現在のフレームは、現在のフレームのブロック1201‐1209と1対1の関係にある一式のブロックを含む。現在のフレーム内のブロック1205の動きベクトルは、その後、対応するグローバル動き補償されたフレームのブロック1201‐1204のグローバル動きベクトルから推定されてよい。特に、ブロック1205は、グローバル動き補償フレーム上の隣り合うブロック1201‐1204各々について計算された単一の均一な動きベクトルから全ての方向の増加量により並進または動きシフトされる。その結果生じる最も整合するベクトルが、ブロック1205の最終動きベクトルになる。この増加分は、XcおよびYcという補正パラメータ対で表されてよく、ここではXcが水平グローバル方向のスカラーシフトを表し、Ycが垂直グローバル方向のスカラーシフトを表す。
【0073】
ある実施形態においては、ローカル動き推定法は、補正グローバル動き補償法と類似しているが、前者では、ブロック補償量が現在のフレームと参照フレームとの比較に基づき決定されるのに比して、後者ではこの量を現在のフレームと、現在のフレームのグローバル動き補償された版との比較に基づいて決定されることが異なる。幾らかの実装例においては、補償量は、対象ブロックから所定の範囲内(例えば、対象ブロックを囲む3ピクセルブロックの範囲内)にあるピクセルの動きベクトルに基づいて決定される。
【0074】
ローカル動きベクトルおよび補正グローバル動きベクトルの計算に対して隣接検索アルゴリズムを利用することの決定的な利点は、対象ブロックについて限られた数の隣接ブロックのみを検索すればいい、ということにある。加えて、これら隣接ブロックを利用して導出およびリファインされる動き推定値は、既に前のフレームで計算済みである。故に、これら技法は、動き推定の効率を大幅に高める。
【0075】
図13は、現在のフレームの各ブロックについてどの動き補償法を利用すべきかを選択する工程を示す。例えば、マルチプレクサ1310は先ず、グローバル動き補償法1312と、よりリファインされた補償法1314との間で選択を行う。この決定は、フレームの前景ブロックを背景ブロックから区別するセグメンテーションマスク1318の利用に基づいて行われる。グローバル動き補償1312は背景ブロックのみに適用される。任意のブロックがより精度の高い補正法を必要とする場合、マルチプレクサ1302は、ローカル動き補償法1304と補正グローバル動き補償法1306、いずれをそのブロックに適用するかの決定を行う。この決定は、そのブロックを補償するのに、ローカル動き補償法1304と補正グローバル動き補償法1306のいずれを利用するとエラーがより小さくなるか、を考えて行われる。故に、最終的なセグメンテーションマスク1318は、対象ブロック各々について適切な動き補償法を選択することができるので、グローバル、ローカル、または補正グローバル動きベクトル一式を各ブロックについて計算することができる。
【0076】
図14に示す本発明の別の側面によると、後処理手順1400を、図13の回路から取得したローカル動きベクトル1418をリファインするのに用いる。一般的なローカル動きベクトルは、ノイズおよびアパーチャー効果を受けやすい。故に、メジアンフィルタ1402および1404一式が、ローカルベクトル1418のx−ベクトル方向およびy−ベクトル方向両方に適用されて、ローカル補正に関する悪影響をいずれも最小限に抑える。メジアンフィルタの動作の前提は、隔離されたローカルブロックに隣接する全てのブロックが、隔離されたブロックの動きとは大幅に異なる均一な方向に動くとすると、隔離されたブロックの動きベクトルは、大部分の動きと実質的に適合するよう補正されねばならない、というものである。入力セグメンテーションマスク1406をメジアンフィルタ1402および1404とともに利用して、これら隔離されたブロックを特定する。メジアンフィルタの後に、x‐方向およびy‐方向両方のリファインされたローカル動きベクトル1408‐1410は、x‐方向およびy‐方向両方に、エッジ適合またはガウスフィルタ1412および1414一式によりさらなる処理を受ける。ガウスフィルタ1412および1414は、それぞれx−方向およびy−方向にローカル動きベクトル1408および1410を平滑化することで動作するが、ここで各ベクトル成分に適用される平滑化量は、図10および11で上述した手順を利用した入力オブジェクトエッジマップ1416により決定される。
【0077】
本発明のまた別の側面においては、動き補償補間法を利用して、一対の入力参照フレームおよび現在のフレーム間の1以上の中間フレームを推定する。先ず、一対のフレーム間のオブジェクトの動きを、一式の動きベクトルによりブロック毎に特徴づける。動きベクトルはその後、1以上の中間フレームを補間するのに利用され、それらが順次フレーム間の動き軌跡を捉えるようにする。より具体的には、図15に示すように、モジュール1502を利用して、グローバル動き補償が必要な中間フレームの領域を補間する。この種類の動き補償補間は、一式の所定のグローバルアフィンパラメータ1504および参照フレーム1506と現在の入力フレーム1508の対とに基づいて計算される。モジュール1510を利用して、ローカル動き補償が必要な中間フレームの領域を補間する。この種類の動き補償補間は、一式の所定の入力ローカル動きベクトルおよび参照フレーム1506と現在の入力フレーム1508の対とに基づいて達成される。セグメンテーションマスク1514を利用して、1フレームの各領域が、補間中に、グローバルまたはローカルに動き補償されるべきかを決定してよい。
【0078】
以上示した実施形態は、例示的であり、本発明の範囲を制限するものではない。開示した通信システムの様々なブロックで実装できるとして記載した式は、ハードウェア回路および/またはプロセッサ上で動作するソフトウェア命令により計算することができる。式の計算は、式内の項や演算そのものではなくてもよい。例えば、式計算は、式計算の結果が略等しくなるような、他の項および演算を利用して行われてもよい。故に、通信システムの様々なブロックは、直接これら式を計算することなしに、式に基づいた計算を行うことで行われてもよい。
【0079】
図16A−16Eを参照すると、本発明の様々な例示的実装例が示されている。
【0080】
図16Aを参照すると、本発明は、高精細テレビ(HDTV)1620に実装しうる。本発明は、HDTV1620の、一般的に図16Aでは1622として特定される処理および/または制御回路、WLANインタフェース1629、および/または大容量データ記憶装置1627を実装してよい。HDTV1620はHDTV入力信号を有線形式あるいは無線形式で受信して、ディスプレイ1626用にHDTV出力信号を生成する。幾らかの実施例においては、HDTV1620の信号処理回路および/または制御回路1622および/または他の回路(不図示)はデータ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはHDTVが必要としうるその他の種類の処理を行いうる。
【0081】
HDTV1620は、データを不揮発な形で記憶しうる大容量データ記憶装置1627と通信しうるが、ここで大容量データ記憶装置1627は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。HDTV1620は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1628に接続されうる。HDTV1620はWLANインタフェース1629を介したWLANへの接続を支援しうる。
【0082】
図16Bを参照すると、本発明は、車両1600のデジタル娯楽システム1604に実装することができ、これは、WLANインタフェース1616および/または大容量データ記憶装置1610を含みうる。
【0083】
デジタル娯楽システム1604は、データを不揮発な形で記憶しうる大容量データ記憶装置1610と通信しうる。大容量データ記憶装置1610は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。デジタル娯楽システム1604は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1614に接続されうる。デジタル娯楽システム1604はWLANインタフェース1616を介したWLANへの接続を支援しうる。
【0084】
図16Cを参照すると、本発明は、携帯式アンテナ1651を含みうる携帯電話機1650に実装しうる。本発明は、携帯電話機1650の、一般的に図16Cでは1652として特定される処理および/または制御回路、WLANインタフェース1668、および/または大容量データ記憶装置1664を実装してよい。幾らかの実施例においては、携帯電話機1650は、マイクロフォン1656、スピーカおよび/または音声出力ジャックなどの音声出力1658、ディスプレイ1660、および/またはキーパッド、ポインティングデバイス、および/またはボイス駆動および/または他の入力デバイスなどの入力デバイス1662を含みうる。携帯電話機1650内の信号処理および/または制御回路1652および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他の携帯電話機能を行いうる。
【0085】
携帯電話機1650は、データを不揮発な形で記憶する大容量データ記憶装置1664と通信しうるが、大容量データ記憶装置1664は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。携帯電話機1650は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1666に接続されうる。携帯電話機1650はWLANインタフェース1668を介したWLANへの接続を支援しうる。
【0086】
図16Dを参照すると、本発明はセットトップボックス1680に実装しうる。本発明は、セットトップボックス1680の、一般的に図16Dでは1684として特定される処理および/または制御回路、WLANインタフェース1696、および/または大容量データ記憶装置1690を実装してよい。セットトップボックス1680はブロードバンドソースなどのソースから信号を受け取り、テレビおよび/またはモニタおよび/または他のビデオおよび/または音声出力デバイスなどのディスプレイ1688に適した、標準音声/映像信号および/または高精細音声/映像信号を出力してよい。セットトップボックス1680内の信号処理および/または制御回路1684および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他のセットトップボックス機能を行いうる。
【0087】
セットトップボックス1680は、データを不揮発な形で記憶する大容量データ記憶装置1690と通信しうる。大容量データ記憶装置1690は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。セットトップボックス1680は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1694に接続されうる。セットトップボックス1680はWLANインタフェース1696を介したWLANへの接続を支援しうる。
【0088】
図16Eを参照すると、本発明は、メディアプレーヤ1700に実装しうる。本発明は、メディアプレーヤ1700の、一般的に図16Eでは1704として特定される処理および/または制御回路、WLANインタフェース1716、および/または大容量データ記憶装置1710を実装してよい。幾らかの実施例においては、メディアプレーヤ1700は、ディスプレイ1707、および/またはキーパッド、タッチパッドなどのユーザ入力1708を含む。幾らかの実施例においては、メディアプレーヤ1700は、典型的にメニュー、ドロップダウンメニュー、アイコンおよび/またはポイントアンドクリックインタフェースをディスプレイ1707および/またはユーザ入力1708を介して利用するグラフィカルユーザインタフェース(GUI)を利用しうる。メディアプレーヤ1700はさらに、スピーカおよび/または音声出力ジャックなどの音声出力1709を含む。メディアプレーヤ1700の信号処理および/または制御回路1704および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他のメディアプレーヤ機能を行いうる。
【0089】
メディアプレーヤ1700は、圧縮された音声および/または映像コンテンツなどのデータを不揮発な形で記憶する大容量データ記憶装置1710と連通しうる。幾らかの実施形態においては、圧縮された音声ファイルは、MP3形式あるいは他の適切な圧縮された音声および/または映像形式に準拠したファイルを含む。大容量データ記憶装置1710は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。メディアプレーヤ1700は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1714に接続されうる。メディアプレーヤ1700はWLANインタフェース1716を介したWLANへの接続を支援しうる。これら記載されたものに加えて他の実施例も考えられる。
【0090】
入力フレームシーケンスから動き補償されたフレームを効率よく且つ正確に補間する様々な技法を含む、動き補償画像レートコンバータに係るシステムおよび方法を記載してきた。当業者であれば、本発明が記載された実施形態以外の方法によっても実施できることを理解するであろうし、記載された実施形態は例示を目的としたものであって、それに限定することは意図していない。本発明は以下に記載する請求項によってのみ限定される。
【技術分野】
【0001】
本願は、米国連邦法典35セクション119(e)に基づき2006年6月27日出願の米国仮出願番号第60/817,061の恩恵を享受しており、この出願の開示の全体をここに参照として組み込む。
【背景技術】
【0002】
典型的な映画は、24Hz、25Hz、または30Hzで記録される。通常のビデオカメラの画像レートは、50Hzおよび60Hzである。これらに対して、市販のテレビディスプレイは、120Hzまでの画像レートを有し、順次走査またはインターレース走査いずれかを利用する。故に、ハイエンドのTVディスプレイを用いて放送ビデオをインタフェースしようとすると、例えば画像レートコンバータなどを用いて放送ビデオの本来のシーケンスをアップコンバートする必要がある。画像レートコンバータの動作は典型的に、低周波数のソースであるデバイスからのフレームシーケンスが高周波のあて先ディスプレイに登録される前の時間インスタンスで画像フレームを補間する、というものである。
【0003】
単純な画像レートコンバータにおいては、画像はしばしば、次の画像がソースであるデバイスから届くまでの間、あて先のディスプレイにおいて繰り返されるので、動きが生じると、ぼけ(blur)および激しい振動(judder)を生じる場合がしばしばある。動き推定回路および動き補償回路を画像レートコンバータで利用すると、これら望ましくない効果を低減し、動画シーケンスを高性能に変換することができる。動き補償は、補間された画像のエレメントがどこにあるかを、該エレメントの動きの方向および速度に基づいて推定することで行われる。その後、方向および速度の値は、動きベクトルとして表され、エレメントを新たに補間したフレームの正しい位置に「動かす」のに利用される。この手法を適切に適用することで、動きを伴う任意の画像シーケンスへの影響は一目瞭然であり、生成画像はアップコンバージョン前の本来のシーケンスと見分けがつかないまでになる。
【0004】
故に、動き補償された画像レート変換に伴う計算コストを最小限に抑え、その推定精度を最大化する方法およびシステムを決定することが望ましい。例えば、様々な動き補償法を、動き補償効率性と、結果生じる補間されたフレームの精度との間の平衡を保つべく、ソースであるフレームのシーケンス内の異なる領域に対して設計および適用してよい。さらに、この効率性と精度との間の平衡を達成すべく動き補償法自身を個々に最適化してよい。加えて、動き補償画像レートコンバータのシステムアーキテクチャ全体を、該アーキテクチャを様々なディスプレイデバイスに準拠させることで、汎用性を高めるよう設計することができる。
【発明の開示】
【0005】
本発明は、入力信号の時間的に隣接するフレーム対間のグローバル動きおよびローカル動きを推定して、これら動きベクトルを適用して、これら隣接するフレーム間に補間、および動き補償されたフレームを少なくとも1枚生成するシステムおよび方法に関する。
【0006】
本発明の一側面によると、動き補償画像レートコンバータ(MCPRC)を提供して、入力信号の連続フレーム間のオブジェクト動きを推定する。先ず、信号をMCPRCの処理モジュールで処理して、フレームの重要な領域を隔離する。そして、MCPRCの動き補償フレームレートコンバータ(MCFRC)を利用して、アフィン動きパラメータ一式を利用して任意の二つの連続フレーム間のグローバル動きを推定する。さらに、MCFRCは、動きベクトル一式を利用してフレーム間のローカル動きを推定し、ここで、各動きベクトルはローカル動きベクトルまたは補正グローバル動きベクトルのいずれかである。
【0007】
一実施形態においては、MCFRCは、2段処理によりアフィン動きパラメータ一式を生成するグローバルアフィン動き推定エンジンを含む。特に、グローバル並進推定・アフィン予測モジュールを提供して、パラメータをアフィンパラメータリファインモジュールでリファインする前に、粗いレベルのパラメータ推定を生成してよい。
【0008】
一実施形態においては、MCFRCのローカル動き補正モジュールを利用して、参照フレームの対象領域に隣接する隣接領域を特定することで、現在のフレームの対象領域について動きベクトルを生成する。対象領域の動きベクトルは、その後、参照フレームについて計算した隣接領域の動きベクトルに基づいて計算されうる。結果生じる動きベクトルは、ローカル動きベクトルである。
【0009】
一実施形態においては、MCFRCのローカル動き補正モジュールを利用して、対象領域に隣接する隣接領域について計算したアフィン動きパラメータに基づいて、現在のフレームの対象領域について動きベクトルを生成する。結果生じる動きベクトルは、補正グローバル動きベクトルである。
【0010】
一実施形態においては、エッジマスクとセグメンテーションマスクとの組み合わせを利用して、現在のフレームの前景領域を決定して、ローカル動きベクトルまたは補正グローバル動きベクトルのいずれかを利用して動き補償を行う。これら2つのベクトル間の選択は、二つのベクトルの各々を対象領域に適用した結果生成される推定エラーに基づいて行われてよい。
【0011】
本発明の別の側面においては、グローバルアフィン動き推定エンジンのグローバル並進・推定モジュールを提供して、現在のフレームと参照フレームとの間のグローバル並進動きを推定する。このモジュールは、フレーム間のグローバル並進動きを粗く推定するアフィンパラメータ一式を生成する位相相関技術の利用により、動作する。位相相関技術では、先ず、特定のデシメーションファクタにより、現在のフレームおよび参照フレームそれぞれをディメーションする。結果生じるデシメーションされた現在のフレームおよび参照フレームは、その後フーリエ変換される。変換された現在のフレームに対応する位相は、その後、変換された参照フレームに対応する位相から減算されて、位相差アレイが生成される。この位相差アレイの指数をその後、逆フーリエ変換して、相関面を生成する。相関面の最大値および相関面における最大値の位置を利用して、グローバル並進動きに関するアフィンパラメータを計算してよい。
【0012】
この粗いレベルの推定から生成されるアフィンパラメータは、さらに、グローバルアフィン動き推定エンジンのアフィンパラメータリファインモジュールでリファインされる。このモジュールは、先ず粗いレベルの推定から得られたアフィンパラメータを利用して参照フレームを更新することに基づくリファイン技術を利用する。その後、更新された参照フレームと現在のフレームとの間の差を求めて、これをアフィンパラメータリファインに利用して、更新された参照フレームと現在のフレームとの間の差を最小限に抑える。
【0013】
本発明の別の側面によると、MCFRCのローカル動き補正モジュールが提供され、現在のフレームの対象領域の動きベクトルを計算する。このモジュールにおいて行われる計算は、グローバルアフィン動き推定モジュールから求めたグローバルアフィン動きパラメータ一式に基づく。特に、アフィンパラメータを利用してセグメンテーションマスクを生成することで、現在のフレームの前景領域および背景領域を特定する。そして、オブジェクトエッジ強さマップを生成して、現在のフレーム上の大きなエッジ強さを有する領域を特定する。続いて、対象領域に関する前景領域、背景領域、および大きなエッジ強さを有する領域に基づいて現在のフレームの対象領域について適切な動き推定法を選択する。
【0014】
一実施形態においては、動き推定法は、補正グローバル動き推定法およびローカル動き推定法のいずれかである。
【0015】
一実施形態においては、セグメンテーションマスクは、先ず、アフィンパラメータを利用して参照フレームを更新することで生成される。そして、更新された参照フレームと現在のフレームとの間の差異フレームを求める。差異フレームの各領域を、その後、閾値と比較して、この領域を前景領域および背景領域のいずれかに分類する。
【0016】
一実施形態においては、このセグメンテーションマスクは、さらに第2処理でリファインされて、最終セグメンテーションマスクが生成される。この処理は、先ず、少なくとも2つの接続された領域を有する最初のセグメンテーションマスク上のオブジェクトを決定することを含む。その後、各特定されたオブジェクトが占める面積を数量化する。続いて、各数量化された面積を閾値と比較して、オブジェクトの接続された領域各々を、前景領域および背景領域のいずれかに再分類する。
【0017】
一実施形態においては、先ず、現在のフレームの各領域の垂直方向および水平方向に相関する1以上の固有値を生成することで、オブジェクトエッジ強さマップを生成する。固有値の最大値を次に決定する。最大値が画定する範囲に実質的に在る固有値を有する各領域を、重要なエッジ強さを有するものとして分類する。
【0018】
一実施形態においては、メジアンフィルタ、エッジフィルタ、およびガウスフィルタのうち少なくとも1つを、対象領域について生成された動きベクトルに適用する。
【0019】
一実施形態においては、各々グローバルアフィン動きベクトル、ローカル動きベクトル、または補正グローバル動きベクトルである、MCFRCで生成された動きベクトルを利用して、現在のフレームと参照フレームとの間に動き補償されたフレームを補間する。
【0020】
本発明の別の側面によると、MCPRCは、MCFRCの出力信号を処理する後処理モジュールを含み、ここで出力信号は、入力信号の本来のフレームレートより高いフレームレートを有する。
【0021】
一実施形態においては、後処理モジュールは、処理モジュールとMCFRCとの間に配置され、処理モジュールからの信号をさらに処理する。加えて、後処理モジュールの出力信号を、入力信号の本来のフレームレートと略等しいフレームレートを有するよう適合させる。
【0022】
一実施形態においては、処理モジュールは、ノイズ低減およびデインターレースの少なくともいずれかを行う回路を有する。後処理モジュールは、フレーム画像スケーリング、強調および色管理の少なくともいずれかを行う回路を有する。
【図面の簡単な説明】
【0023】
【図1】本発明による、動き補償画像レートコンバータ(MCPRC)回路の一例示的実施形態を示す。
【0024】
【図2】本発明によるMCPRCの別の例示的実施形態を示す。
【0025】
【図3】図1および2の動き補償フレームレートコンバータ(MCFRC)モジュールの例示的ブロック図を示す。
【0026】
【図4】図3のグローバルアフィン動き推定機能の例示的ブロック図を示す。
【0027】
【図5】図4のグローバル並進推定機能の例示的実装例を示す。
【0028】
【図6】図4の高速フーリエ変換(FFT)機能の例示的実装例を示す。
【0029】
【図7】図5の位相計算機能の例示的ブロック図を示す。
【0030】
【図8】最初のセグメンテーションマスクを計算する例示的ブロック図を示す。
【0031】
【図9】最終のセグメンテーションマスクを計算する例示的ブロック図を示す。
【0032】
【図10】オブジェクトエッジマップを計算する例示的ブロック図を示す。
【0033】
【図11】図10の固有値計算機能の例示的ブロック図を示す。
【0034】
【図12】ローカル動き補償法および補正グローバル動き法を実装する例示的な方法を示す。
【0035】
【図13】フレーム対の間に動きベクトルを生成するのに適切な動き補償法を選択する例示的なフロー図を示す。
【0036】
【図14】図13の手順から計算されるローカル動きベクトルを後処理する例示的ブロック図を示す。
【0037】
【図15】図3の動き補償補間機能の例示的ブロック図を示す。
【0038】
【図16A】開示された技術を利用することのできる例示的高精細テレビのブロック図を示す。
【0039】
【図16B】開示された技術を利用することのできる例示的車両のブロック図を示す。
【0040】
【図16C】開示された技術を利用することのできる例示的携帯電話機のブロック図を示す。
【0041】
【図16D】開示された技術を利用することのできる例示的セットトップボックスのブロック図を示す。
【0042】
【図16E】開示された技術を利用することのできる例示的メディアプレーヤのブロック図を示す。
【発明を実施するための最良の形態】
【0043】
図1は、本発明の一側面による、動き補償画像レートコンバータ(MCPRC)回路100の高レベル図である。入力信号102は、ビデオフレームの離散シーケンスを有しており、MCPRC回路100に入力され、MCPRC回路は、アップコンバートされ動き補償された出力信号128を、MCPRC回路100のモジュール104、108、112、および116を介して生成する。MCPRC回路100の各モジュールを以下で説明する。アップコンバートの後、MCPRC回路100からの出力信号128は入力信号102のフレームレートより典型的に非常に高いフレームレートを有する。例えば、入力ビデオ信号102は、60Hzの画像レートを有するビデオカメラから生成されてよい。ビデオ信号は、例えば120Hzのリフレッシュレートを有するLCDパネルディスプレイ上の出力に適した形にすべく、MCPRC回路100を利用してアップコンバートされる必要がありうる。一般的には、フレームレートのアップコンバートは、所定の数の固有フレームを時間的に隣接した入力フレームの各対間に注入することで達成される。これらの介在フレームは、フレーム間のオブジェクトの動作軌跡を実質的に捉えるように作成されてよく、これによりアップコンバートの後でディスプレイされる際のビデオ画像シーケンス全体の滑らかさを高める。
【0044】
図1を参照すると、入力信号102は先ずフロントエンドモジュール104でダウンコンバートおよび復調処理を受ける。このフロントエンドモジュール104は、チューナ、デモジュレータ、コンバータ、コーデック、アナログビデオデコーダ等の部材を含みうる。フロントエンドモジュール104からの出力106は、その後、下流のノイズ低減およびデインターレースモジュール108へ渡され、そこでは、信号106を、本来のインタレース走査に基づく形式から、高品質な順次走査出力110へ変換し、且つ、ブロックノイズおよびモスキートノイズなどのアナログノイズおよび補償アーチファクトを大幅に低減させる。結果生じる順次走査出力110は動き補償されたフレームレート変換(MCFRC)モジュール112へ供給され、そこでは動き補償され補間されたフレームを生成してビデオ出力シーケンス114が生成される。ビデオ出力シーケンス114は、元々の入力信号102の本来のフレームレートより高いフレームレートを有してよい。MCFRCモジュール112の動作の詳細を以下で詳述する。アップコンバートされたビデオ出力114は、その後、後処理モジュール116により処理され、典型的にデジタルビデオパイプラインに存在するスケーリング、エッジ強さ、色管理、画像制御などの追加的な強化機能がビデオ信号114に授受される。
【0045】
幾らかの実施形態においては、図1に示す全MCPRCアーキテクチャが単一のチップ上に実装されてもよい。一つの例示的構造においては、このMCPRCチップはテレビ回路に組み込まれてもよく、テレビ回路から、MCPRCチップのアップコンバートおよび後処理された出力128が外部のビデオディスプレイパネルへ送信される。しかし、後処理モジュール116が処理パイプラインから切り離され、その代わりにディスプレイパネルに組み込まれている場合、MCPRCシステム100の利用性が厳しく制限されることになる。これは、チップからLCDディスプレイに送信される際、信号114が入力信号102の本来のフレームレートより非常に高い帯域幅を占めるからである。多くの場合、テレビ回路がLCDディスプレイと通信できるような、整合高帯域幅インタフェースを見つけることはできない。しかし、MCPRCアーキテクチャ100を単一チップにカプセル化すると、システム100の様々な部材間で情報交換が促進されるという利点がある。
【0046】
図2は、別のMCPRC構成200の高レベル図であり、図1のMCFRCブロック112および後処理モジュール116の順序を入れ替えて、ビデオを図2のMCFRCモジュール212で高い帯域幅にアップコンバートする処理よりも、後処理モジュール216の処理のほうを前に行う。アップコンバート機能を処理パイプラインの最後の段階に配置することで、アップコンバート機能が残りの回路と隔離されうる。故に、この配置により、モジュール204、208、および216をMCFRCモジュール212から切り離すことができる。幾らかの実施形態においては、モジュール204、208、216、および212は、図1のそれぞれ対応するモジュール104、108、116、および112と構造的に類似している。一例示的アーキテクチャにおいては、モジュール204、208、および216を組み込むチップが、テレビ受信回路に集積されて、入力信号202の本来のフレームレートで動作してよく、一方でMCFRCモジュール212が、他の処理部から切り離されたLCDディスプレイパネル内に集積されてもよい。この配置においては、テレビ回路からLCDディスプレイパネルへの送信信号214は、LCDパネルディプレイが要するアップコンバート帯域幅より比較的低い本来の帯域幅を占める。テレビ受信回路はLCDディスプレイと、低電圧差動信号(LVDS)チャネルなどの標準的なビデオ/ディスプレイインタフェースを介して通信する機能を有してよい。この低帯域幅のインタフェースにより、システム200の用途は広がり、任意の数の異なるディスプレイパネルをテレビ受信回路に接続することが可能となる。
【0047】
図1、2に示すビデオ情報信号経路118および218はそれぞれ、対応するMCPRCシステム100および200のモジュール間の情報伝達を促進すべく提供されている。特に、MCFRCモジュール112および212に伝達される情報は、例えば、クローズドキャプションディプレイの位置、画面上の表示の存在、各入力信号102および202の本来のフレームレート、および各入力信号102および202の起点およびアクティブビデオ境界を含む。
【0048】
図示されているMCPRCシステム100および200では、入力ビデオ信号102および202は、標準精細(NTSC/PAL/SECAM)から高精細に亘っており、インタレース型でも順次型でもよい。幾らかの例においては、ビデオ信号解像度は、低フレームレートを有する標準解像度よりもさらに低い。例えば、入力ビデオ信号は、iPODなどの携帯型メディアプレーヤ内のコネクタデバイスから、毎秒15または30フレーム入力されるQVGA(320×240)であってよい。幾らかの例においては、低解像度ビデオ信号がパーソナルメディアプレーヤまたはマルチメディア携帯電話機のビデオドックにコネクタデバイスを介して供給されてよく、ここでドックには、例えば5fpsで320×160から60fpsで720×480の空間・時間変換(spatial and temporal conversion)を行う機能を有する集積回路が含まれうる。インタフェース入力は、ビデオに起因する(video‐originated)、またはフィルムに起因する(film‐originated)材料から形成されてよい。ビデオに起因する材料は、先ずデインタレースされて、フィールドレートからフレームレートへ変換されてからMCFRCモジュール112および212に入力される。フィルムに起因する材料は、MCFRCモジュール112および212への入力用に、本来の順次型形式に変換される。
【0049】
図3は、オブジェクト動き推定を入力ビデオ信号302の連続フレーム対の間に行うことを目的とする、図1および2のMCFRCモジュール112および212それぞれの例示的実装例300を示す。連続フレームの各対は補間されてよく、2つのフレームのうち前のほうは、「参照フレーム」と称され、後のほうは「現在のフレーム」と称される。図3のMCFRCモジュール300の例示的実施形態によると、動き推定エンジン306による動き補償および動き補償補間モジュール310による動き補間の前処理として、入力信号302はMCRFC制御部304で処理される。特に、動き推定エンジン306は、MCFRC制御部304からリンク322および324を介して送信された処理済フレーム情報を利用して、グローバルおよびローカル動き補償情報を入力シーケンス302の連続フレーム対各々に生成する。結果生じるグローバルおよびローカル動き補償情報は、今度は動き補償補間モジュール310へリンク308を介して転送され、また、MCFRC制御部304へもリンク322および324を介して転送される。幾らかの例においては、動き補償補間を行うという判断も、ビデオ入力信号302と、ビデオ情報信号316を介して得た入力の任意の追加的ビデオ情報とともに、制御部304から動き補償補間モジュール310に送られてよい。MCFRC制御部304および動き推定エンジン306から取得したデータに基づいて、動き補償補間を動き補償補間モジュール310で行うことで、望ましいフレームレートのビデオ画像シーケンスを生成するが、ここでシーケンスには、元々のビデオフレームシーケンスの間に時間的に散在した補間されたフレームが含まれている。幾らかの例においては、MCFRC制御部304は制御信号を、リンク326を介して動き補償補間モジュール310へ送ることで、ビデオ信号の一部の補間を不要としてよい。さらに、動き推定エンジン306からのビデオフレーム情報、ビデオ情報信号316、およびビデオ入力302も、出力314を介して他の処理ブロックへ転送されてさらなる処理を受けてよい。動き推定エンジン306、動き補償補間モジュール310、およびMCFRC制御部304の動作を、以下で詳述する。
【0050】
図3のMCFRC制御部304は、動き予測および後続のビデオ補間の品質に影響しうるある種のフレームフィーチャを削除しようと試みることで、入力ビデオ信号302の各フレームを処理する。この信号処理は、「真の」画像のみがグローバル動き推定の基として利用されるべきグローバルアフィン動き推定機能モジュール318において特に重要である。例えば、入力ビデオ信号302が、郵便ポスト(pillar box)およびサブタイトルなどのフィーチャを含むDVDである場合、MCFRC制御部304は、フレームを動き推定エンジン306に送る前に、各DVDフレームからピラーボックスを削除し、且つ、サブタイトルがフレームと融合している領域を特定することが望ましい。入力信号302が放送ビデオ信号である場合、MCFRC制御部304は、各ビデオフレームに関連付けられた静的チャネルロゴおよびティッカシンボルを特定することが望ましいが、このティッカシンボルとは、フレームの残りのシーンとはしばしば完全に反対方向に一定の速度で回転するものである。処理されたフレームシーケンスは、その後、リンク322および324を介して動き推定エンジン306へ転送されて、ローカルおよびグローバル動き推定がなされる。
【0051】
別の実施形態においては、入力ビデオ信号302および入力ビデオ信号302に関する追加的情報が、入力316および330をそれぞれ介してMCFRC制御部304へ送信される。特に、ビデオ情報信号316は、例えばビデオに追加されるべき合成情報または動きベクトルの推定精度に影響するようなビデオの起点情報などの、入力ビデオ信号302に関する追加的情報を提供する。例えば、入力信号がコンピュータグラフィック信号であることが既知である場合、該信号は、ビデオに起因する信号と比して、水平方向、垂直方向両方に非常に鋭い遷移を持つ可能性が高い。グラフィックに起因するビデオ入力に関する動きベクトルは典型的に、ひとたびこの情報が動き推定エンジン306に提供されると、より正確に推定できる。しかし、ビデオ起点が動き推定エンジン306に提供されない場合、結果生じる動きベクトルの予測は不正確となってしまう。
【0052】
また別の実施形態によると、「シーンカット」検知回路を提供して、ビデオ信号内の特定のフレームについては動き補償補間モジュール310をディセーブルにすべきか否かを判断してよい。動き補償補間システムを利用することで、シーンが変更される間正確な動き推定を行うことが可能となる。故に、結果生じるアップコンバートされたビデオシーケンス内でこれら悪影響で大きい場合にはいつでも、入力信号302の動き補償補間を停止することができる。この一時的に補間を停止する判断は、動き推定エンジン306からリンク322および324を介して受信されたグローバルおよびローカル動き情報の分析に基づいてMCFRC制御部304で行われうる。MCFRC制御部304は、通信リンク326を介して動き補償補間モジュール310をイネーブルにもディセーブルにもできる。補間するという判断がなされると、MCFRC制御部304は、チャネル330から入力ビデオ信号302を、チャネル316からオプションのビデオ情報信号を、リンク322からグローバル動き信号を、およびリンク324からローカル動き信号を、動き補償補間モジュール310へ転送して、動き補償補間に備える。さもなくば、情報は出力314を介して後続の段に選択的に転送される。MCFRC制御部304では任意の他の基準を利用して動き補償補間をイネーブルおよびディセーブルにしてもよいことに留意されたい。
【0053】
図4は、図3の動き推定エンジン306のグローバルアフィン動き推定モジュール318の例示的実装例400である。グローバルアフィン動きとは、一般的には、一般にカメラのズーミング、パニング、あるいは回転などの動きが引き起こす、ビデオシーケンスの背景のピクセルの動きのことを言う。幾らかの実装例においては、ビデオフレームシーケンスの背景のピクセルは、全て単一の共通グローバル動きを受けると仮定される。グローバルアフィン動き推定は、通常、背景の動きを幾らかの基本パラメータを利用してモデル化する。特に、アフィンモデルは、6つのアフィンパラメータのみを利用して、任意のフレーム対間のグローバル動き軌跡を表す。アフィンパラメータのうち2つは、カメラのズーミング動きを捉えるのに利用されるスケーリングパラメータであり、2つは回転パラメータであり、2つはパニング動きを捉えるのに利用される並進パラメータである。これら6つのアフィンパラメータは、グローバル動き予測の上で非常な柔軟性を提供する。
【0054】
図4に示すように、グローバルアフィン動き推定モジュール400は2段の処理であり、第1段402が、任意のフレーム対間のグローバル動きを粗い解像度で捉えるのに利用されるアフィンパラメータ一式の粗い推定を行う。より具体的には、第1段は、位相相関法を利用してグローバル並進動きに関する2つのアフィン並進パラメータを推定するが、これは図5‐7との関連で詳述する。第1段はさらに、グローバルな回転およびスケーリング動きに関する、残りの4つのアフィンパラメータを予測する。これら予測は、前のフレーム対など、過去に行った推定から算出した対応アフィン値に基づいている。結果生じるアフィンパラメータを今度は第2段406に渡し、より高精細な解像度レベルにまでリファインする。
【0055】
特に、図4の実施形態によると、フレームシーケンスを有するアクティブビデオ入力信号404を、グローバルアフィン動き推定モジュール400の段402に供給する。幾らかの実施形態においては、サブタイトル、OSDメニューなど全ての重要でないビデオ情報を、グローバルアフィン動き推定モジュール400へ供給する前のアクティブビデオ入力信号404から除去する。段402においては、グローバル並進またはパニング動きに関する、2つのアフィン並進パラメータのみを推定する。グローバル並進動きを隔離する理由は、カメラの動きはその性質上圧倒的に並進的な動きであり、典型的に大きな並進範囲を捉えるのが難しいからである。殆どの市販の動き推定ツールは、非常に制限的な計測範囲を有しており、動きが許容範囲外である場合にはしばしば不正確な動き計測値を生成するきらいがある。これと比較すると、本発明のグローバル並進推定技術によれば、入力フレームの1画像サイズの半分の並進動き範囲まで正確に計測することができる。このグローバル並進推定は、粗い表示フレームの各対に対して適用した位相相関法を利用して達成される。位相相関法は図5との関連で詳述する。2つの粗い予測アフィン並進パラメータを含む粗い並進推測値数1がモジュール402により提供される。さらに、2つのアフィン回転パラメータと2つのアフィンスケーリングパラメータとを含む4つの残りのアフィンパラメータの粗い推定値である数2が、前のフレームのこれらパラメータの過去の推定値に基づいて計算される。
【数1】
【数2】
【0056】
これら粗いレベルのアフィンパラメー推定値数1および数2はその後、RANSAC(RANdom SAmple Consensus)に基づくアフィンパラメータリファインモジュール406へ送信され、さらにリファインされる。このリファインは、先ず、段402からの粗く予測されたアフィンパラメータを利用して参照フレームの画像を動き補償することで達成される。故に、補償された参照フレームと現在のフレームとの間の差は、補償された参照フレーム画像を現在のフレーム画像に実質的に位置合わせするのに必要な、粗く予測されたアフィンパラメータの調節量である。一実施形態においては、RANSACに基づく技術を利用してこのようなリファインを達成する。このRANSACに基づく方法406は先ず、その最も精細な解像度で表される現在のフレームから、所定の数のランダムに配置されたピクセルブロックを選択することで動作する。これらブロックも、補償された参照フレーム内に対応するブロックを有する。次にセグメンテーションマスクを動き補償された現在のフレームに適用して、フレーム画像の前景領域および背景領域を区別する。フレームの背景領域に属するブロックのみを利用して、グローバル動き予測に関するアフィンパラメータをリファインする。こうする理由は、背景のピクセルの動きだけが、アフィンパラメータにより概算されるグローバル動きに曝されると仮定されるからである。リファインされた並進推定値A<SUB>i</SUB>および予測推定値であるB<SUB>i</SUB>はその結果アフィンパラメータリファイン段406で生成される。セグメンテーションマスク算出を以下に詳述する。
【0057】
図5は、位相相関法の例示的ブロック図実装500を示す。位相相関法は、図4のグローバル並進推定および予測段402に実装されて、2つの連続フレーム間のグローバル並進動きに関するアフィンパラメータの粗いレベルの予測を行う。位相相関は、どちらもフーリエ領域で表される並進画像とその参照画像との間に位相差のみが存在するようなフーリエシフト特性を利用することで、この並進動きを計測する。さらには、この位相差の指数の逆フーリエ変換により、相関面が形成され、ここから2つの画像フレーム間の並進動きの計測値が得られる。この動作を表す例を以下で説明する。
【0058】
標準解像度のテレビ画像のフーリエ変換は、殆どの用途において法外に高価になってしまうことが公知である。この動作の複雑性を低減すべく、参照フレームと現在のフレームとを、これら画像がフーリエ変換前に所定のファクタによりダウンサンプリングされた、粗い解像度レベルで表す。このダウンサンプリングは、図5に示す、水平方向および垂直方向両方で各画像をデシメーションするデシメーションモジュール502を介して達成される。一実施形態においては、画像のデシメーションは多相を分離可能なフィルタ法を利用して達成される。結果生じるデシメーションされた画像フレームが、垂直方向および水平方向両方で各々高速フーリエ変換(FFT)される。2DのFFTは、2つの連続する1DのFFTを行うことで達成され、デシメーションされた画像は典型的に、列方向のFFTをモジュール506により受ける前に行方向のFFTをモジュール504により受ける。参照フレームおよび現在のフレームに対応するFFT結果は各々2Dの複素数データアレイで表され、一時的なデータ記憶用にメモリ508に配置される。続いて、2D位相差アレイが、2つの複素数データアレイから生成される。次に、位相差アレイのエレメントについての指数(element-wise exponential)をとって、1Dの列IFFT514の後に1D行IFFT512により2D逆高速フーリエ変換(IFFT)された行列を生成する。これら列514および行512のIFFT中に、メモリブロック516を一時的なデータ記憶用に利用してもよい。このような2DのIFFTから、2Dデータアレイでも表される正規化相関面を次に出力518に生成して、最大計算モジュール520に供給する。最大計算モジュール520は、相関面アレイの最大の値および位置、且つ最大値に隣接する値の幾らかを決定することで動作する。最後に、サブピクセル補間モジュール522を利用して、最大値およびそれに隣接する値を補間して、グローバル並進推定値を生成する。2DのFFTの詳細および位相差計算を以下で説明する。
【0059】
図5の各フーリエ変換の出力は複素数の2Dアレイである。結果生じる動き推定の精度には有限精度計算による数量化効果が直接関与するので、各複素数の浮動小数点を記憶するのに必要となりうるビット数は注意深く考慮されねばならない。一実施形態においては、192ビットの浮動小数点FFTをモジュール504で利用して、行FFTを実装し、128ビットの浮動小数点FFTをモジュール506で利用して、列FFTを実装する。図6は、例示的な256×256ビットの2DのFFT設計600を示す。設計600の各工程で利用される例示的なビット精度も提供される。行FFT実装は実質的に列FFTと同一でありえるが、1DのFFTにより1方向に変換された後の入力フレームは転置され(90度回転される)、同様に、同じ1DのFFTを利用して第2の方向に変換される。2DのFFTも、2つの実質的に同一な1DのIFFTを利用して同様に実装されうる。
【0060】
図7は、図5の位相差計算モジュール510の例示的ブロック図700である。2つの複素数データアレイ内の対応するエレメントから得られた複素数の値の対を、例示的な位相差計算モジュール700へ入力702および710として供給する。図7に示す一実施形態においては、入力702および710がそれぞれ、フーリエ領域のデシメーションされた参照画像フレームおよび現在の画像フレームを表す二つの複素数データアレイから取られる。入力702および710の実数部分および虚数部分を分離して分ける。複素数入力702および710と関連する位相を、入力信号の虚数部分および複素数部分の商から、アークタンルックアップテーブル706および714それぞれを用いて、処理704および712で得られた商の大きさにそれぞれ基づいて、決定する。直交補正モジュール708および716でリファインされた後、二相は加算器718で互いから減算され、位相差718が生成される。同様に、この処理を、現在のFFTデータアレイおよび参照FFTデータアレイの対応するエレメントの全ての対に対して行って、位相差の2Dアレイを生成してよい。
【0061】
図5‐7の例示的実装例によるグローバル動き推定を行った後で、アフィン動き値をグローバル動き補償の適切なピクセルに対して割り当ててよい。フレームの前景に属するピクセルは、例えばセグメンテーションマスクなどの利用により、背景に属するものと区別される必要がある。背景に属するピクセルは、前述の6つのアフィンパラメータで概算される単一のグローバル動きを受けることが仮定されてよい。これに対して前景のピクセルは、同じグローバル動きでは動かない。このようなピクセルに対しては、適切なローカル動きベクトルまたは補正グローバル動きベクトルを決定してよい。
【0062】
図8は、セグメンテーションマスクの最初の版を計算する例示的方法を示す。例示により、グローバル補償フレーム802および本来のフレーム804がシステム800への入力として供給される。そして、ピクセル毎の、2つの入力フレーム間の絶対値の差を、加算器処理805および絶対値処理806で計算する。結果生じるピクセル毎の絶対値の差のアレイを、合算・比較モジュール808に供給して、絶対値の差をピクセルブロック毎に加算して、閾値807と比較する。絶対値のブロック合算値が閾値より大きい場合にピクセルブロック全体がフレームの前景に属すものとして分類されうる。さもなくば、ブロックはフレームの背景に属すものとして分類されうる。モジュール808はフレーム内に各ピクセルブロックの単一のビットバイナリ出力を生成して、この情報を提供し、これら出力の集合体が、潜在的にフレーム内の前景ブロックと背景ブロックとを区別するセグメンテーションマップ809を形成する。ノイズおよび隔離動き領域の存在により、セグメンテーションマップ809は誤って分類されたブロック領域を含みうる。故に、セグメンテーションマップ809は、拡張(dilation)812の後の閉路(closing)810などのバイナリ形態素処理を受け、より同質な最初のセグメンテーションマスク814を生成する。
【0063】
図9は、図8の処理から得た最初のセグメンテーションマスク902に基づき最終のセグメンテーションマスクを計算する例示的方法900を示す。セグメンテーションマスク902は、適切な補償法を画像フレームの個々のピクセルに適用しうるマップを提供する。システム900は、最初のセグメンテーションマスク902から様々な接続されたオブジェクトを検出することで動作し、ここからピクセルが再分類されて特定の補正処置を受けてよい。一実施形態においては、接続された部材分析904をモジュール904で利用して、接続されたオブジェクトを特定する。特に、二つのオブジェクトを幾らかのピクセルのみで分離した場合、小さなオブジェクトを大きなオブジェクトの一部としてみることができる。図9の実施形態においては、2×2の解像度ブロックサイズが接続された部材分析で利用されて、オブジェクト接続特定のコスト全体を低減する。しかし、他の解像度サイズも可能である(例えば3×3、4×4)。接続部材分析の最後には、モジュール904は最初のセグメンテーションマスク902から全ての接続オブジェクトを特定するラベルリストを出力するが、ラベルリストにおいて各オブジェクトはフレーム内の該オブジェクトの位置を特定するインデックスに対応している。インデックスおよびラベルのリストは、オブジェクトごとのエッジブロックの数を計算するモジュール906に供給される。オブジェクト内のブロック数を所定の閾値912と比較することで、オブジェクトが小さいと判断される場合、オブジェクトのブロックを、画像フレームの背景に属すものとして分類する。これら背景ブロックは、上述のグローバルアフィン動き推定パラメータを利用して補償されてよい。しかし、1つのオブジェクトに関するブロック数が多い場合、これらブロックは画像フレームの前景に属すものとして分類されることがあり、グローバル動き補償法よりも正確でありうるローカル動き補正法を施される。
【0064】
本発明の別の側面によると、入力フレームについてオブジェクトエッジマップのロバストな生成手順を提供して、該フレーム内で大きなエッジ強さ(significant edge strength)を有するオブジェクトを特定することができる。オブジェクトに関するエッジ強さの欠如は、該オブジェクトとその直ぐ周辺との間にコントラストが弱いことを示す。故に、該オブジェクトがたとえセグメンテーションマスクが示すよう入力フレームの前景に存在したとしても、該オブジェクトのピクセルに対してはグローバル動き補償を適用してよい。これは、より正確な補償法を、エッジ強さが小さいオブジェクトに適用することで生じる結果が、グローバル動き補償法を適用することで生じるものと同一である可能性が高く、且つ、グローバル動き補償法が二つの方法のよりコスト効率のよい可能性が高いからである。故に、計算効率のためには、ロバストなオブジェクトエッジマップ生成法を提供して、エッジが強いオブジェクトを検知してよい。この方法によると、任意の画像フレーム内のピクセルブロック全てについて、2つの固有値が生成され、該固有値はそれぞれブロックの水平方向の計測値および垂直方向の計測値に対応する。例えば、SDTV解像度標準を2×2のブロックサイズについて利用すると仮定すると、各SDTV画像フレームについて、全部で360個のブロックが水平方向に、且つ288個のブロックが垂直方向に生成されることになる。全ての固有値の最大値(ev_max)をその後決定する。固有値が、最大値により計測される所定の範囲にあるこれらブロックは、例えば、範囲「0.8*ev_max,ev*max」内にあり、大きなエッジ強さを有するものとして特定されてよく、故に、グローバル動き補正法よりもより厳密な動き補償を要する可能性が高い。これらブロックは値1を割り当てられ、値0を割り当てられうる残りのブロックから区別されてよい。この結果、1のブロックが1画像フレーム内の大きなエッジ強さを有するオブジェクトを明示するようなオブジェクトエッジマップが生成される。さらには、1および0のブロックの利用により、このオブジェクトエッジマップ自身がかなりノイズに対して強くなる。本実施形態では2×2のブロックサイズを利用したが、任意の他のブロックサイズを利用することもできる(例えば4×4)。
【0065】
図10は、入力フレーム1002内の各ピクセルブロックに関する固有値の対を計算する処理1000を示す。各固有値は、そのブロックの垂直方向および水平方向の計測値に対応しており、ルマ(luma)または強度領域で表されるそのブロックのピクセル値から計算される。5×5のブロックサイズの利用を仮定すると、フレーム1002のピクセル強度は、先ず5×5のウィンドウサイズを有する2次元ガウスフィルタ1004でフィルタにかけられる。ガウスフィルタ1004にかける主な目的は、ノイズを平滑化して、各ブロック内の小さなオブジェクトを隔離して、それらを固有値算出の候補から除くことにある。これは、大きなエッジ強さを有する大きなオブジェクトのみに対してこのより厳密な補償処置を行うほうがコスト効率がよいからである。ブロックサイズが5×5であるガウスフィルタについては、各々がサイズ720×8ビットである4つのラインバッファを利用してこのようなフィルタサイズをサポートしてよい。これらラインバッファはSRAM内に実装できる。別の実施形態においては、ガウスフィルタ1004は、シリコン領域の利用を最小限にとどめるべく、より小さなブロックサイズ(例えば3×3)を利用してもよい。この結果、ラインバッファハードウェアのサイズが、5×5のブロックサイズに比較して、50%低減できる。
【0066】
ガウスフィルタ1004でフィルタされた2Dの強度値アレイ1005は、アレイ1005の強度値の勾配を推定すべく、勾配処理モジュール1006に供給される。一実施形態において、勾配は、アレイ1005の隣接する強度値間の一次差(first order difference)を求めることに基づいて、水平方向および垂直方向両方において、計算される。この一次差計算は、ブロック毎に行われてよい。例えば、2×2のブロックのデータアレイ1005を例にとって考えるが、みて分かるように、この例では、ブロックがA、B、D、およびEという強度値からなり、強度CおよびFが右側で隣接しており、GおよびHが底側で隣接している。
【数3】
ブロックの水平方向および垂直方向の一次差の勾配は以下のように計算される。
【数4】
同じ勾配計算を、入力フレーム1002の2Dデータアレイ1005の2×2ブロック全てに適用してよいので、水平方向の勾配値アレイ1008および垂直方向の勾配値アレイ1010の生成は、両方ともスクエアリング回路1012に供給される。これら入力勾配アレイに基づいて、スクエアリング回路1012は、以下のアレイ出力1014、1015、1016、および1018を生成する。
【数5】
ここで、*はドット積演算を示す。式2の3つの出力各々も、同じサイズを勾配値アレイ1008および1010として有する2Dデータアレイである。これら3つの出力アレイ1014、1016、および1018はその後2D平均値計算モジュール1020に送られさらなる処理を受ける。
【0067】
2次元平均値計算モジュール1020は、ブロック毎に、各入力アレイ1014、1016、および1018の2乗勾配値を平均化して、アレイのブロック毎にスカラー平均値を生成することで動作する。例えば、2×2ブロックサイズを利用する場合、各ブロックの4つの勾配値が平均化されて、単一のスカラー値を生じる。この結果、数6で表される平均2乗勾配値の3つの2Dアレイ1022、1024、および1026がモジュール1020から生成される。
【数6】
各2Dアレイは、画像全体の全てのスカラー値を含むよう適合される。これら3つの平均2乗勾配アレイは、その後固有値計算モジュール1030へ供給されて、そこで2つn固有値を、入力フレーム1002の各ピクセルブロックに、数6のアレイに基づいて生成する。
【0068】
図11は、図10の固有値計算モジュール1030の例示的実装1100を示す。示されているように、数7のアレイは数8のアレイから加算器1102で減算され、差行列Rを生成する。この差行列は、その後、処理1104でエレメントごとに2乗されて、数9のアレイがエレメントごとの2乗処理1108および4つの乗算のファクタを受けた後で、数9のアレイに加算器1106で加算される。
【数7】
【数8】
【数9】
結果生じる合計行列1106は、またも処理1110でエレメントごとに2乗され、行列Sが生成される。そして固有値アレイE<SUB>v1</SUB>およびE<SUB>v2</SUB>は、以下のように計算されうる。
【数10】
ここで、アレイE<SUB>v1</SUB>およびE<SUB>v2</SUB>の各エレメントは、図10に示す入力画像フレーム1002のピクセルブロックそれぞれに相関する固有値である。これら固有値を利用して、大きなエッジ強さを有するこれらピクセルを特定するオブジェクトエッジマップの決定に利用されてよく、故に、ローカル動き推定の候補である。
【0069】
図10および11に示す実施形態においては、2×2のブロックサイズを固有値の計算に利用した。しかし、これより大きなブロックサイズを利用してハードウェア利用を低減することもできる。さらには、より小さなブロックサイズを利用することで推定の精度を上げることもできる。さらには、各固有値が正、小数点、および0から1の間で変化することから、8ビット精度を利用して固有値を表すことで、数値の観点からは十分な精度が得られることがある。しかし、他の精度値を利用することもできる。
【0070】
まとめると、セグメンテーションマスク計算処理を、図8および9に関して記載した。結果生じるセグメンテーションマスクを利用して、画像フレームの前景および背景に属すオブジェクトを特定することができる。加えて、図10および11に関して、オブジェクトエッジマップ生成処理を上述した。これにより得られるオブジェクトエッジマップを利用すると、大きなエッジ強さを有するフレームのオブジェクトを隔離することができる。セグメンテーションマスクおよびオブジェクトエッジマップの組み合わせにより、動き推定精度および効率性両方を最大化するような、画像フレームのサブ領域への適用に適した補正技術を決定することができる。概して、1フレーム内の各ピクセルブロックは、該ブロックの前景/背景分類およびそれらが示すエッジ強さに基づいて、3つの種類の動き補償のいずれかを経る。これら3つの種類とは、グローバル動き補償、補正グローバル動き補償、およびローカル動き補償である。前景の各ブロックは、図9で生成されたもののようなセグメンテーションマスクにより特定され、画像フレームのオブジェクトエッジマップが決定するローカル動き補償または補正グローバル動き補償を施される。フレームの背景のブロックも、セグメンテーションマスクによる特定が可能であり、図4‐7の処理で得られたグローバルアフィンパラメータを利用してグローバル動き補償を施される。この補償法種別選択処理およびローカルおよび補正グローバル動き補償法を以下で詳述する。
【0071】
図12は、2つのピクセルブロック間の動きを捉えるローカル動きベクトルの導出に利用される技術の例示的実施形態を示しており、ここで1つのブロックは参照フレーム内にあり、他のブロックは現在のフレーム内にある。ブロック対は、それらの隣接するブロックの動きに対する、自身の動きに基づいて検出されうる。例えば、動き検出は、相関するブロック対間の動きが、隣接するブロック間の均一なグローバル動きの方向とは異なる、という観察に基づいて行われてよい。図12に示された実施形態によると、3×3のブロック配置1200の中心のブロック1205を、ローカル動きベクトルを推定する現在のフレームの対象ブロックとして選択する。現在のフレーム処理の時間tにおいては、ブロック1205は4つの隣接するブロック1201‐1209を、それぞれブロック1205からみた北、東、南、および西に有する。さらに、現在のフレームは、現在のフレームの前の時間t‐1において処理される、時間的に隣接する参照フレームを有する。この参照フレームは、現在のフレームのブロック1201‐1209と1対1の関係にある一式のブロックを含む。現在のフレームのブロック1205の動きベクトルは、その後、前のフレームのブロック1201‐1204について時間t‐1に計算されたグローバル動きベクトルから概算することができる、というのも、中心のブロックの動きは、隣接するブロックのものと僅かにしかずれていないと仮定できるからである。時間t+1における後続のフレームでは、各ブロック1206‐1209の動きベクトルを、時間tに計算されたその北、南、西、および東に隣接するブロックの動きから推定する。故に、フレームシーケンスの動きの値は、隣接する値に基づいて、画像シーケンスのフレームがそれぞれ時間的に進むにつれて、連続的にリファイン(refine)されていくことになる。
【0072】
図12も、本発明の別の側面による補正グローバル動き補償法を示すのに利用される。この補正グローバル動き補償法は、グローバル動き補償が、ブロックの動きを推定するには十分な精度を持たない場合に利用される可能性が高い。故に、グローバルアフィンパラメータに小さな補正を行って、生じる精度を向上させねばならない。また図12の実施形態を参照すると、3×3のブロック配置1200の中心のブロック1205を、ブロック1205からそれぞれ北、東、南、および西に位置する4つの隣接するブロック1201‐1209を有する現在のフレーム上の対象ブロックとして選択する。補正グローバル動き補償を決定した現在のフレームのグローバル動き補償版を決定しうる。このグローバル動き補償された現在のフレームは、現在のフレームのブロック1201‐1209と1対1の関係にある一式のブロックを含む。現在のフレーム内のブロック1205の動きベクトルは、その後、対応するグローバル動き補償されたフレームのブロック1201‐1204のグローバル動きベクトルから推定されてよい。特に、ブロック1205は、グローバル動き補償フレーム上の隣り合うブロック1201‐1204各々について計算された単一の均一な動きベクトルから全ての方向の増加量により並進または動きシフトされる。その結果生じる最も整合するベクトルが、ブロック1205の最終動きベクトルになる。この増加分は、XcおよびYcという補正パラメータ対で表されてよく、ここではXcが水平グローバル方向のスカラーシフトを表し、Ycが垂直グローバル方向のスカラーシフトを表す。
【0073】
ある実施形態においては、ローカル動き推定法は、補正グローバル動き補償法と類似しているが、前者では、ブロック補償量が現在のフレームと参照フレームとの比較に基づき決定されるのに比して、後者ではこの量を現在のフレームと、現在のフレームのグローバル動き補償された版との比較に基づいて決定されることが異なる。幾らかの実装例においては、補償量は、対象ブロックから所定の範囲内(例えば、対象ブロックを囲む3ピクセルブロックの範囲内)にあるピクセルの動きベクトルに基づいて決定される。
【0074】
ローカル動きベクトルおよび補正グローバル動きベクトルの計算に対して隣接検索アルゴリズムを利用することの決定的な利点は、対象ブロックについて限られた数の隣接ブロックのみを検索すればいい、ということにある。加えて、これら隣接ブロックを利用して導出およびリファインされる動き推定値は、既に前のフレームで計算済みである。故に、これら技法は、動き推定の効率を大幅に高める。
【0075】
図13は、現在のフレームの各ブロックについてどの動き補償法を利用すべきかを選択する工程を示す。例えば、マルチプレクサ1310は先ず、グローバル動き補償法1312と、よりリファインされた補償法1314との間で選択を行う。この決定は、フレームの前景ブロックを背景ブロックから区別するセグメンテーションマスク1318の利用に基づいて行われる。グローバル動き補償1312は背景ブロックのみに適用される。任意のブロックがより精度の高い補正法を必要とする場合、マルチプレクサ1302は、ローカル動き補償法1304と補正グローバル動き補償法1306、いずれをそのブロックに適用するかの決定を行う。この決定は、そのブロックを補償するのに、ローカル動き補償法1304と補正グローバル動き補償法1306のいずれを利用するとエラーがより小さくなるか、を考えて行われる。故に、最終的なセグメンテーションマスク1318は、対象ブロック各々について適切な動き補償法を選択することができるので、グローバル、ローカル、または補正グローバル動きベクトル一式を各ブロックについて計算することができる。
【0076】
図14に示す本発明の別の側面によると、後処理手順1400を、図13の回路から取得したローカル動きベクトル1418をリファインするのに用いる。一般的なローカル動きベクトルは、ノイズおよびアパーチャー効果を受けやすい。故に、メジアンフィルタ1402および1404一式が、ローカルベクトル1418のx−ベクトル方向およびy−ベクトル方向両方に適用されて、ローカル補正に関する悪影響をいずれも最小限に抑える。メジアンフィルタの動作の前提は、隔離されたローカルブロックに隣接する全てのブロックが、隔離されたブロックの動きとは大幅に異なる均一な方向に動くとすると、隔離されたブロックの動きベクトルは、大部分の動きと実質的に適合するよう補正されねばならない、というものである。入力セグメンテーションマスク1406をメジアンフィルタ1402および1404とともに利用して、これら隔離されたブロックを特定する。メジアンフィルタの後に、x‐方向およびy‐方向両方のリファインされたローカル動きベクトル1408‐1410は、x‐方向およびy‐方向両方に、エッジ適合またはガウスフィルタ1412および1414一式によりさらなる処理を受ける。ガウスフィルタ1412および1414は、それぞれx−方向およびy−方向にローカル動きベクトル1408および1410を平滑化することで動作するが、ここで各ベクトル成分に適用される平滑化量は、図10および11で上述した手順を利用した入力オブジェクトエッジマップ1416により決定される。
【0077】
本発明のまた別の側面においては、動き補償補間法を利用して、一対の入力参照フレームおよび現在のフレーム間の1以上の中間フレームを推定する。先ず、一対のフレーム間のオブジェクトの動きを、一式の動きベクトルによりブロック毎に特徴づける。動きベクトルはその後、1以上の中間フレームを補間するのに利用され、それらが順次フレーム間の動き軌跡を捉えるようにする。より具体的には、図15に示すように、モジュール1502を利用して、グローバル動き補償が必要な中間フレームの領域を補間する。この種類の動き補償補間は、一式の所定のグローバルアフィンパラメータ1504および参照フレーム1506と現在の入力フレーム1508の対とに基づいて計算される。モジュール1510を利用して、ローカル動き補償が必要な中間フレームの領域を補間する。この種類の動き補償補間は、一式の所定の入力ローカル動きベクトルおよび参照フレーム1506と現在の入力フレーム1508の対とに基づいて達成される。セグメンテーションマスク1514を利用して、1フレームの各領域が、補間中に、グローバルまたはローカルに動き補償されるべきかを決定してよい。
【0078】
以上示した実施形態は、例示的であり、本発明の範囲を制限するものではない。開示した通信システムの様々なブロックで実装できるとして記載した式は、ハードウェア回路および/またはプロセッサ上で動作するソフトウェア命令により計算することができる。式の計算は、式内の項や演算そのものではなくてもよい。例えば、式計算は、式計算の結果が略等しくなるような、他の項および演算を利用して行われてもよい。故に、通信システムの様々なブロックは、直接これら式を計算することなしに、式に基づいた計算を行うことで行われてもよい。
【0079】
図16A−16Eを参照すると、本発明の様々な例示的実装例が示されている。
【0080】
図16Aを参照すると、本発明は、高精細テレビ(HDTV)1620に実装しうる。本発明は、HDTV1620の、一般的に図16Aでは1622として特定される処理および/または制御回路、WLANインタフェース1629、および/または大容量データ記憶装置1627を実装してよい。HDTV1620はHDTV入力信号を有線形式あるいは無線形式で受信して、ディスプレイ1626用にHDTV出力信号を生成する。幾らかの実施例においては、HDTV1620の信号処理回路および/または制御回路1622および/または他の回路(不図示)はデータ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはHDTVが必要としうるその他の種類の処理を行いうる。
【0081】
HDTV1620は、データを不揮発な形で記憶しうる大容量データ記憶装置1627と通信しうるが、ここで大容量データ記憶装置1627は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。HDTV1620は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1628に接続されうる。HDTV1620はWLANインタフェース1629を介したWLANへの接続を支援しうる。
【0082】
図16Bを参照すると、本発明は、車両1600のデジタル娯楽システム1604に実装することができ、これは、WLANインタフェース1616および/または大容量データ記憶装置1610を含みうる。
【0083】
デジタル娯楽システム1604は、データを不揮発な形で記憶しうる大容量データ記憶装置1610と通信しうる。大容量データ記憶装置1610は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。デジタル娯楽システム1604は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1614に接続されうる。デジタル娯楽システム1604はWLANインタフェース1616を介したWLANへの接続を支援しうる。
【0084】
図16Cを参照すると、本発明は、携帯式アンテナ1651を含みうる携帯電話機1650に実装しうる。本発明は、携帯電話機1650の、一般的に図16Cでは1652として特定される処理および/または制御回路、WLANインタフェース1668、および/または大容量データ記憶装置1664を実装してよい。幾らかの実施例においては、携帯電話機1650は、マイクロフォン1656、スピーカおよび/または音声出力ジャックなどの音声出力1658、ディスプレイ1660、および/またはキーパッド、ポインティングデバイス、および/またはボイス駆動および/または他の入力デバイスなどの入力デバイス1662を含みうる。携帯電話機1650内の信号処理および/または制御回路1652および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他の携帯電話機能を行いうる。
【0085】
携帯電話機1650は、データを不揮発な形で記憶する大容量データ記憶装置1664と通信しうるが、大容量データ記憶装置1664は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。携帯電話機1650は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1666に接続されうる。携帯電話機1650はWLANインタフェース1668を介したWLANへの接続を支援しうる。
【0086】
図16Dを参照すると、本発明はセットトップボックス1680に実装しうる。本発明は、セットトップボックス1680の、一般的に図16Dでは1684として特定される処理および/または制御回路、WLANインタフェース1696、および/または大容量データ記憶装置1690を実装してよい。セットトップボックス1680はブロードバンドソースなどのソースから信号を受け取り、テレビおよび/またはモニタおよび/または他のビデオおよび/または音声出力デバイスなどのディスプレイ1688に適した、標準音声/映像信号および/または高精細音声/映像信号を出力してよい。セットトップボックス1680内の信号処理および/または制御回路1684および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他のセットトップボックス機能を行いうる。
【0087】
セットトップボックス1680は、データを不揮発な形で記憶する大容量データ記憶装置1690と通信しうる。大容量データ記憶装置1690は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。セットトップボックス1680は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1694に接続されうる。セットトップボックス1680はWLANインタフェース1696を介したWLANへの接続を支援しうる。
【0088】
図16Eを参照すると、本発明は、メディアプレーヤ1700に実装しうる。本発明は、メディアプレーヤ1700の、一般的に図16Eでは1704として特定される処理および/または制御回路、WLANインタフェース1716、および/または大容量データ記憶装置1710を実装してよい。幾らかの実施例においては、メディアプレーヤ1700は、ディスプレイ1707、および/またはキーパッド、タッチパッドなどのユーザ入力1708を含む。幾らかの実施例においては、メディアプレーヤ1700は、典型的にメニュー、ドロップダウンメニュー、アイコンおよび/またはポイントアンドクリックインタフェースをディスプレイ1707および/またはユーザ入力1708を介して利用するグラフィカルユーザインタフェース(GUI)を利用しうる。メディアプレーヤ1700はさらに、スピーカおよび/または音声出力ジャックなどの音声出力1709を含む。メディアプレーヤ1700の信号処理および/または制御回路1704および/または他の回路(不図示)は、データ処理、符号化および/または暗号化、計算、データフォーマッティングおよび/またはその他のメディアプレーヤ機能を行いうる。
【0089】
メディアプレーヤ1700は、圧縮された音声および/または映像コンテンツなどのデータを不揮発な形で記憶する大容量データ記憶装置1710と連通しうる。幾らかの実施形態においては、圧縮された音声ファイルは、MP3形式あるいは他の適切な圧縮された音声および/または映像形式に準拠したファイルを含む。大容量データ記憶装置1710は、ハードディスクドライブ(HDD)および/またはデジタルバーサタイルディスク(DVD)ドライブなどの、光学記憶デバイスおよび/または磁気記憶デバイスを含みうる。HDDは、直径が約1.8"より小さい一以上のプラッタを含むミニHDDであってもよい。メディアプレーヤ1700は、RAM、ROM、フラッシュメモリなどの低レイテンシー不揮発性メモリ、および/または他の適切な電子データ記憶装置などのメモリ1714に接続されうる。メディアプレーヤ1700はWLANインタフェース1716を介したWLANへの接続を支援しうる。これら記載されたものに加えて他の実施例も考えられる。
【0090】
入力フレームシーケンスから動き補償されたフレームを効率よく且つ正確に補間する様々な技法を含む、動き補償画像レートコンバータに係るシステムおよび方法を記載してきた。当業者であれば、本発明が記載された実施形態以外の方法によっても実施できることを理解するであろうし、記載された実施形態は例示を目的としたものであって、それに限定することは意図していない。本発明は以下に記載する請求項によってのみ限定される。
【特許請求の範囲】
【請求項1】
動き推定を適用する方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成する工程と、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成する工程と、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、方法。
【請求項2】
少なくとも1つの粗いアフィンパラメータを生成する工程と、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成する工程と、をさらに備える、請求項1に記載の方法。
【請求項3】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項1に記載の方法。
【請求項4】
前記参照フレームの前記第2領域に隣接する隣接領域を特定する工程と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成する工程と、をさらに備え、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項1に記載の方法。
【請求項5】
前記参照フレームの前記第2領域に隣接する隣接領域を特定する工程と、
前記隣接領域に対応するアフィン動きパラメータを計算する工程と、
前記計算されたアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する工程と、をさらに備え、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項1に記載の方法。
【請求項6】
前記第2領域は、前記現在のフレームに適用されたセグメンテーションマスクおよびオブジェクトエッジ強さマップのうち少なくとも1つにより決定される、請求項1に記載の方法。
【請求項7】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する、請求項1に記載の方法。
【請求項8】
グローバル動き推定を行う方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記現在のフレームと前記参照フレームとを位相相関させる工程と、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する工程と、を備える、方法。
【請求項9】
前記現在のフレームと前記参照フレームとを位相相関させる工程は、
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする工程と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する工程と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する工程と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する工程と、を含む、請求項8に記載の方法。
【請求項10】
前記相関面の最大値と前記相関面の前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項9に記載の方法。
【請求項11】
前記デシメーションファクタは1、4、および9のいずれかである、請求項9に記載の方法。
【請求項12】
前記少なくとも1つのアフィンパラメータを利用して前記参照フレームを更新する工程と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める工程と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする工程と、をさらに備える、請求項8に記載の方法。
【請求項13】
参照フレームとの関連で現在のフレームの対象領域について少なくとも1つの動きベクトルを生成する方法であって、
前記現在のフレームと前記参照フレームとの間のグローバル動きを推定する少なくとも1つのアフィンパラメータを提供する工程と、
前記少なくとも1つのアフィンパラメータに基づいて、前記現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクを生成する工程と、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップを生成する工程と、
前記対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について前記少なくとも1つの動きベクトルを計算する工程と、を備える、方法。
【請求項14】
前記少なくとも1つの動きベクトルを計算する工程は、
グローバル動きベクトル、補正グローバル動きベクトル、およびローカル動きベクトルのうち少なくとも1つを計算する工程を含む、請求項13に記載の方法。
【請求項15】
前記セグメンテーションマスクを生成する工程は、
前記少なくとも1つのアフィンパラメータを利用して前記参照フレームを更新する工程と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める工程と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する工程と、を含む、請求項13に記載の方法。
【請求項16】
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する工程と、
前記オブジェクトが占める面積を数量化する工程と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する工程と、をさらに備える、請求項15に記載の方法。
【請求項17】
前記オブジェクトエッジ強さマップを生成する工程は、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する工程と、
前記複数の固有値の最大値を決定する工程と、を含み、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域である、請求項13に記載の方法。
【請求項18】
前記対象領域に対応する前記動きベクトルに対して、メジアンフィルタリング、エッジ適合フィルタリング、およびガウスフィルタリングのうち少なくとも1つを適用する工程をさらに備え、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項13に記載の方法。
【請求項19】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する工程をさらに備える、請求項13に記載の方法。
【請求項20】
動き補償されたフレームレート変換を行う方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記現在のフレームと前記参照フレームとを処理する工程と、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する工程と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う工程と、を備える、方法。
【請求項21】
前記動き補償補間された出力信号を後処理する工程をさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより早いフレームレートを有する、請求項20に記載の方法。
【請求項22】
前記処理された現在のフレームと前記処理された参照フレームとを後処理して、前記動き補償補間を行うべき信号を生成する工程をさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有する、請求項20に記載の方法。
【請求項23】
前記現在のフレームと前記参照フレームとを処理する工程は、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う工程を含む、請求項20に記載の方法。
【請求項24】
動き補償フレームレートコンバータであって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する回路と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成するグローバルアフィン動き推定モジュールと、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成するローカル動き補正モジュールと、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、動き補償フレームレートコンバータ。
【請求項25】
前記グローバルアフィン動き推定モジュールは、
少なくとも1つの粗いアフィンパラメータを生成するグローバル並進推定・アフィン予測モジュールと、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成するアフィンパラメータリファインモジュールと、を含む、請求項24に記載の動き補償フレームレートコンバータ。
【請求項26】
前記アフィンパラメータリファインモジュールは、RANSAC(RANdom SAmple Consensus)に基づくリファイン法を利用する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項27】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項24に記載の動き補償フレームレートコンバータ。
【請求項28】
前記ローカル動き補正モジュールは、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する回路と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成するローカル動き推定モジュールと、を含み、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項24に記載の動き補償フレームレートコンバータ。
【請求項29】
前記ローカル動き補正モジュールは、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する回路と、
前記隣接領域について計算したアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する補正グローバル動き推定モジュールと、を含み、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項24に記載の動き補償フレームレートコンバータ。
【請求項30】
前記第2領域は、セグメンテーションマスクおよびオブジェクトエッジ強さマップの少なくとも1つを前記現在のフレームに適用することにより決定される、請求項24に記載の動き補償フレームレートコンバータ。
【請求項31】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項32】
前記動き補償フレームレートコンバータは、動き補償画像レートコンバータの内部に提供され、フレームシーケンスを有する入力信号を処理する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項33】
グローバル並進推定モジュールであって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する回路と、
前記現在のフレームと前記参照フレームとを位相相関させる位相相関モジュールと、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する回路と、を備える、グローバル並進推定モジュール。
【請求項34】
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする回路と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する回路と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する回路と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する回路と、を備える請求項33に記載のグローバル並進推定モジュール。
【請求項35】
前記相関面の最大値と前記相関面の前記最大値の位置とを決定する回路をさらに備え、
前記最大値と前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項34に記載のグローバル並進推定モジュール。
【請求項36】
前記デシメーションファクタは1、4、および9のいずれかである、請求項34に記載のグローバル並進推定モジュール。
【請求項37】
前記少なくとも1つのアフィンパラメータは、前記グローバル並進推定モジュールに連結されたアフィンパラメータリファインモジュールに提供され、
前記アフィンパラメータリファインモジュールは、
前記少なくとも1つのアフィンパラメータに基づいて前記参照フレームを更新する回路と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める回路と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする回路と、を含む、請求項33に記載のグローバル並進推定モジュール。
【請求項38】
ローカル動き補正モジュールであって、
現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクと、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップと、
対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について少なくとも1つの動きベクトルを計算する回路と、を備える、ローカル動き補正モジュール。
【請求項39】
前記少なくとも1つの動きベクトルを計算する回路は、
前記対象領域について、補正グローバル動きベクトルおよびローカル動きベクトルのうち少なくとも1つを計算する回路を含む、請求項38に記載のローカル動き補正モジュール。
【請求項40】
前記セグメンテーションマスクは、
前記現在のフレームと前記参照フレームとの間のグローバル動きを特徴付ける少なくとも1つのアフィンパラメータを利用して、前記参照フレームを更新する回路と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める回路と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する回路と、を含む回路により生成される、請求項38に記載のローカル動き補正モジュール。
【請求項41】
前記セグメンテーションマスクは、さらに、
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する回路と、
前記オブジェクトが占める面積を数量化する回路と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する回路と、を含む回路により生成される、請求項40に記載のローカル動き補正モジュール。
【請求項42】
前記オブジェクトエッジ強さマップは、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する回路と、
前記複数の固有値の最大値を決定する回路と、を含む回路により生成され、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域として適合される、請求項38に記載のローカル動き補正モジュール。
【請求項43】
メジアンフィルタ、エッジ適合フィルタ、およびガウスフィルタのうち少なくとも1つを利用して、前記対象領域に対応する前記動きベクトルをフィルタにかけ、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項38に記載のローカル動き補正モジュール。
【請求項44】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する、請求項38に記載のローカル動き補正モジュール。
【請求項45】
動き補償画像レートコンバータであって、
参照フレームと現在のフレームとを少なくとも有する入力信号を受信する回路と、
前記参照フレームと前記現在のフレームとを処理する処理モジュールと、
動き補償フレームレートコンバータと、を備え、
前記動き補償フレームレートコンバータは、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する回路と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う回路と、を含む、動き補償画像レートコンバータ。
【請求項46】
前記動き補償フレームレートコンバータの出力信号を処理する後処理モジュールをさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより高いフレームレートを有する、請求項45に記載の動き補償画像レートコンバータ。
【請求項47】
前記処理された現在のフレームと前記処理された参照フレームとを処理して、前記動き補償フレームレートコンバータへ供給すべき信号を生成する後処理モジュールをさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有するよう適合される、請求項45に記載の動き補償画像レートコンバータ。
【請求項48】
前記処理モジュールは、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う回路を含む、請求項45に記載の動き補償画像レートコンバータ。
【請求項49】
動き補償フレームレートコンバータであって、
参照フレームと現在のフレームとを少なくとも有する入力信号を受信する手段と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成する手段と、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成する手段と、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、動き補償フレームレートコンバータ。
【請求項50】
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定する手段は、
少なくとも1つの粗いアフィンパラメータを生成する手段と、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成する手段と、をさらに含む、請求項49に記載の動き補償フレームレートコンバータ。
【請求項51】
前記少なくとも1つの粗いアフィンパラメータをリファインする手段は、RANSACに基づくリファイン法を利用する、請求項50に記載の動き補償フレームレートコンバータ。
【請求項52】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項49に記載の動き補償フレームレートコンバータ。
【請求項53】
前記参照フレームと前記現在のフレームとの間のローカル動きを推定する手段は、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する手段と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成する手段と、を含み、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項49に記載の動き補償フレームレートコンバータ。
【請求項54】
前記参照フレームと前記現在のフレームとの間のローカル動きを推定する手段は、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する手段と、
前記隣接領域のアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する手段と、を含み、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項49に記載の動き補償フレームレートコンバータ。
【請求項55】
前記現在のフレームに対してセグメンテーションマスクおよびオブジェクトエッジ強さマップの少なくとも1つを適用する手段に基づいて、前記第2領域を決定する手段をさらに備える、請求項49に記載の動き補償フレームレートコンバータ。
【請求項56】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する手段をさらに備える、請求項49に記載の動き補償フレームレートコンバータ。
【請求項57】
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する手段と、
前記現在のフレームと前記参照フレームとを位相相関させる手段と、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する手段と、を備える、グローバル並進推定モジュール。
【請求項58】
前記現在のフレームと前記参照フレームとを位相相関させる手段は、
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする手段と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する手段と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する手段と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する手段と、をさらに含む請求項57に記載のグローバル並進推定モジュール。
【請求項59】
前記相関面の最大値と前記相関面の前記最大値の位置とを決定する手段をさらに備え、
前記最大値と前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項58に記載のグローバル並進推定モジュール。
【請求項60】
前記デシメーションファクタは1、4、および9のいずれかである、請求項59に記載のグローバル並進推定モジュール。
【請求項61】
前記少なくとも1つのアフィンパラメータは、前記グローバル並進推定モジュールに連結されたアフィンパラメータリファインモジュールに提供され、
前記アフィンパラメータリファインモジュールは、
前記少なくとも1つのアフィンパラメータに基づいて前記参照フレームを更新する手段と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める手段と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする手段と、を含む、請求項59に記載のグローバル並進推定モジュール。
【請求項62】
現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクを生成する手段と、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップを生成する手段と、
対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について少なくとも1つの動きベクトルを計算する手段と、を備える、ローカル動き補正モジュール。
【請求項63】
前記少なくとも1つの動きベクトルを計算する手段は、
前記対象領域について、補正グローバル動きベクトルおよびローカル動きベクトルのうち少なくとも1つを計算する手段を含む、請求項62に記載のローカル動き補正モジュール。
【請求項64】
前記セグメンテーションマスクを生成する手段は、
前記現在のフレームと前記参照フレームとの間のグローバル動きを特徴付ける少なくとも1つのアフィンパラメータを利用して、前記参照フレームを更新する手段と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める手段と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する手段と、を含む、請求項62に記載のローカル動き補正モジュール。
【請求項65】
前記セグメンテーションマスクを生成する手段は、
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する手段と、
前記オブジェクトが占める面積を数量化する手段と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する手段と、をさらに含む、請求項64に記載のローカル動き補正モジュール。
【請求項66】
前記オブジェクトエッジ強さマップを生成する手段は、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する手段と、
前記複数の固有値の最大値を決定する手段と、を含み、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域である、請求項62に記載のローカル動き補正モジュール。
【請求項67】
メジアンフィルタ手段、エッジ適合フィルタ手段、およびガウスフィルタ手段のうち少なくとも1つを利用して、前記対象領域に対応する前記動きベクトルをフィルタにかけ、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項62に記載のローカル動き補正モジュール。
【請求項68】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する、請求項62に記載のローカル動き補正モジュール。
【請求項69】
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する手段と、
前記現在のフレームと前記参照フレームとを処理する手段と、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する手段と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う手段と、を備える、動き補償画像レートコンバータ。
【請求項70】
前記動き補償補間を行う手段からの出力信号を後処理する手段をさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより速いフレームレートを有する、請求項69に記載の動き補償画像レートコンバータ。
【請求項71】
前記処理された現在のフレームと前記処理された参照フレームとを後処理して、前記動き補償補間を行う手段へ供給すべき信号を生成する手段をさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有するよう適合される、請求項69に記載の動き補償画像レートコンバータ。
【請求項72】
前記現在のフレームと前記参照フレームとを処理する手段は、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う手段を含む、請求項69に記載の動き補償画像レートコンバータ。
【請求項1】
動き推定を適用する方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成する工程と、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成する工程と、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、方法。
【請求項2】
少なくとも1つの粗いアフィンパラメータを生成する工程と、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成する工程と、をさらに備える、請求項1に記載の方法。
【請求項3】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項1に記載の方法。
【請求項4】
前記参照フレームの前記第2領域に隣接する隣接領域を特定する工程と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成する工程と、をさらに備え、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項1に記載の方法。
【請求項5】
前記参照フレームの前記第2領域に隣接する隣接領域を特定する工程と、
前記隣接領域に対応するアフィン動きパラメータを計算する工程と、
前記計算されたアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する工程と、をさらに備え、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項1に記載の方法。
【請求項6】
前記第2領域は、前記現在のフレームに適用されたセグメンテーションマスクおよびオブジェクトエッジ強さマップのうち少なくとも1つにより決定される、請求項1に記載の方法。
【請求項7】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する、請求項1に記載の方法。
【請求項8】
グローバル動き推定を行う方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記現在のフレームと前記参照フレームとを位相相関させる工程と、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する工程と、を備える、方法。
【請求項9】
前記現在のフレームと前記参照フレームとを位相相関させる工程は、
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする工程と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する工程と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する工程と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する工程と、を含む、請求項8に記載の方法。
【請求項10】
前記相関面の最大値と前記相関面の前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項9に記載の方法。
【請求項11】
前記デシメーションファクタは1、4、および9のいずれかである、請求項9に記載の方法。
【請求項12】
前記少なくとも1つのアフィンパラメータを利用して前記参照フレームを更新する工程と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める工程と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする工程と、をさらに備える、請求項8に記載の方法。
【請求項13】
参照フレームとの関連で現在のフレームの対象領域について少なくとも1つの動きベクトルを生成する方法であって、
前記現在のフレームと前記参照フレームとの間のグローバル動きを推定する少なくとも1つのアフィンパラメータを提供する工程と、
前記少なくとも1つのアフィンパラメータに基づいて、前記現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクを生成する工程と、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップを生成する工程と、
前記対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について前記少なくとも1つの動きベクトルを計算する工程と、を備える、方法。
【請求項14】
前記少なくとも1つの動きベクトルを計算する工程は、
グローバル動きベクトル、補正グローバル動きベクトル、およびローカル動きベクトルのうち少なくとも1つを計算する工程を含む、請求項13に記載の方法。
【請求項15】
前記セグメンテーションマスクを生成する工程は、
前記少なくとも1つのアフィンパラメータを利用して前記参照フレームを更新する工程と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める工程と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する工程と、を含む、請求項13に記載の方法。
【請求項16】
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する工程と、
前記オブジェクトが占める面積を数量化する工程と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する工程と、をさらに備える、請求項15に記載の方法。
【請求項17】
前記オブジェクトエッジ強さマップを生成する工程は、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する工程と、
前記複数の固有値の最大値を決定する工程と、を含み、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域である、請求項13に記載の方法。
【請求項18】
前記対象領域に対応する前記動きベクトルに対して、メジアンフィルタリング、エッジ適合フィルタリング、およびガウスフィルタリングのうち少なくとも1つを適用する工程をさらに備え、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項13に記載の方法。
【請求項19】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する工程をさらに備える、請求項13に記載の方法。
【請求項20】
動き補償されたフレームレート変換を行う方法であって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する工程と、
前記現在のフレームと前記参照フレームとを処理する工程と、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する工程と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う工程と、を備える、方法。
【請求項21】
前記動き補償補間された出力信号を後処理する工程をさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより早いフレームレートを有する、請求項20に記載の方法。
【請求項22】
前記処理された現在のフレームと前記処理された参照フレームとを後処理して、前記動き補償補間を行うべき信号を生成する工程をさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有する、請求項20に記載の方法。
【請求項23】
前記現在のフレームと前記参照フレームとを処理する工程は、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う工程を含む、請求項20に記載の方法。
【請求項24】
動き補償フレームレートコンバータであって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する回路と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成するグローバルアフィン動き推定モジュールと、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成するローカル動き補正モジュールと、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、動き補償フレームレートコンバータ。
【請求項25】
前記グローバルアフィン動き推定モジュールは、
少なくとも1つの粗いアフィンパラメータを生成するグローバル並進推定・アフィン予測モジュールと、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成するアフィンパラメータリファインモジュールと、を含む、請求項24に記載の動き補償フレームレートコンバータ。
【請求項26】
前記アフィンパラメータリファインモジュールは、RANSAC(RANdom SAmple Consensus)に基づくリファイン法を利用する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項27】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項24に記載の動き補償フレームレートコンバータ。
【請求項28】
前記ローカル動き補正モジュールは、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する回路と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成するローカル動き推定モジュールと、を含み、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項24に記載の動き補償フレームレートコンバータ。
【請求項29】
前記ローカル動き補正モジュールは、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する回路と、
前記隣接領域について計算したアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する補正グローバル動き推定モジュールと、を含み、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項24に記載の動き補償フレームレートコンバータ。
【請求項30】
前記第2領域は、セグメンテーションマスクおよびオブジェクトエッジ強さマップの少なくとも1つを前記現在のフレームに適用することにより決定される、請求項24に記載の動き補償フレームレートコンバータ。
【請求項31】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項32】
前記動き補償フレームレートコンバータは、動き補償画像レートコンバータの内部に提供され、フレームシーケンスを有する入力信号を処理する、請求項24に記載の動き補償フレームレートコンバータ。
【請求項33】
グローバル並進推定モジュールであって、
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する回路と、
前記現在のフレームと前記参照フレームとを位相相関させる位相相関モジュールと、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する回路と、を備える、グローバル並進推定モジュール。
【請求項34】
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする回路と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する回路と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する回路と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する回路と、を備える請求項33に記載のグローバル並進推定モジュール。
【請求項35】
前記相関面の最大値と前記相関面の前記最大値の位置とを決定する回路をさらに備え、
前記最大値と前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項34に記載のグローバル並進推定モジュール。
【請求項36】
前記デシメーションファクタは1、4、および9のいずれかである、請求項34に記載のグローバル並進推定モジュール。
【請求項37】
前記少なくとも1つのアフィンパラメータは、前記グローバル並進推定モジュールに連結されたアフィンパラメータリファインモジュールに提供され、
前記アフィンパラメータリファインモジュールは、
前記少なくとも1つのアフィンパラメータに基づいて前記参照フレームを更新する回路と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める回路と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする回路と、を含む、請求項33に記載のグローバル並進推定モジュール。
【請求項38】
ローカル動き補正モジュールであって、
現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクと、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップと、
対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について少なくとも1つの動きベクトルを計算する回路と、を備える、ローカル動き補正モジュール。
【請求項39】
前記少なくとも1つの動きベクトルを計算する回路は、
前記対象領域について、補正グローバル動きベクトルおよびローカル動きベクトルのうち少なくとも1つを計算する回路を含む、請求項38に記載のローカル動き補正モジュール。
【請求項40】
前記セグメンテーションマスクは、
前記現在のフレームと前記参照フレームとの間のグローバル動きを特徴付ける少なくとも1つのアフィンパラメータを利用して、前記参照フレームを更新する回路と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める回路と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する回路と、を含む回路により生成される、請求項38に記載のローカル動き補正モジュール。
【請求項41】
前記セグメンテーションマスクは、さらに、
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する回路と、
前記オブジェクトが占める面積を数量化する回路と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する回路と、を含む回路により生成される、請求項40に記載のローカル動き補正モジュール。
【請求項42】
前記オブジェクトエッジ強さマップは、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する回路と、
前記複数の固有値の最大値を決定する回路と、を含む回路により生成され、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域として適合される、請求項38に記載のローカル動き補正モジュール。
【請求項43】
メジアンフィルタ、エッジ適合フィルタ、およびガウスフィルタのうち少なくとも1つを利用して、前記対象領域に対応する前記動きベクトルをフィルタにかけ、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項38に記載のローカル動き補正モジュール。
【請求項44】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する、請求項38に記載のローカル動き補正モジュール。
【請求項45】
動き補償画像レートコンバータであって、
参照フレームと現在のフレームとを少なくとも有する入力信号を受信する回路と、
前記参照フレームと前記現在のフレームとを処理する処理モジュールと、
動き補償フレームレートコンバータと、を備え、
前記動き補償フレームレートコンバータは、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する回路と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う回路と、を含む、動き補償画像レートコンバータ。
【請求項46】
前記動き補償フレームレートコンバータの出力信号を処理する後処理モジュールをさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより高いフレームレートを有する、請求項45に記載の動き補償画像レートコンバータ。
【請求項47】
前記処理された現在のフレームと前記処理された参照フレームとを処理して、前記動き補償フレームレートコンバータへ供給すべき信号を生成する後処理モジュールをさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有するよう適合される、請求項45に記載の動き補償画像レートコンバータ。
【請求項48】
前記処理モジュールは、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う回路を含む、請求項45に記載の動き補償画像レートコンバータ。
【請求項49】
動き補償フレームレートコンバータであって、
参照フレームと現在のフレームとを少なくとも有する入力信号を受信する手段と、
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定して、少なくとも1つのアフィン動きパラメータを生成する手段と、
前記参照フレームと前記現在のフレームとの間のローカル動きを推定して、少なくとも1つの動きベクトルを生成する手段と、を備え、
前記少なくとも1つのアフィン動きパラメータは、前記参照フレームと前記現在のフレームとの間の第1領域の前記グローバル動きを推定し、
前記少なくとも1つの動きベクトルは、前記参照フレームと前記現在のフレームとの間の第2領域のローカル動きを推定する、動き補償フレームレートコンバータ。
【請求項50】
前記参照フレームと前記現在のフレームとの間のグローバル動きを推定する手段は、
少なくとも1つの粗いアフィンパラメータを生成する手段と、
前記少なくとも1つの粗いアフィンパラメータをリファインして、前記少なくとも1つのアフィン動きパラメータを生成する手段と、をさらに含む、請求項49に記載の動き補償フレームレートコンバータ。
【請求項51】
前記少なくとも1つの粗いアフィンパラメータをリファインする手段は、RANSACに基づくリファイン法を利用する、請求項50に記載の動き補償フレームレートコンバータ。
【請求項52】
前記第1領域は、前記現在のフレームの背景領域であり、
前記少なくとも1つのアフィン動きパラメータは、前記第1領域の動き補償に利用される、請求項49に記載の動き補償フレームレートコンバータ。
【請求項53】
前記参照フレームと前記現在のフレームとの間のローカル動きを推定する手段は、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する手段と、
前記参照フレームについて計算した前記隣接領域の動きベクトルを利用して、前記現在のフレームの前記第2領域の前記少なくとも1つの動きベクトルを生成する手段と、を含み、
前記少なくとも1つの動きベクトルは、ローカル動きベクトルである、請求項49に記載の動き補償フレームレートコンバータ。
【請求項54】
前記参照フレームと前記現在のフレームとの間のローカル動きを推定する手段は、
前記参照フレームの前記第2領域に隣接する隣接領域を特定する手段と、
前記隣接領域のアフィン動きパラメータを利用して、前記第2領域の前記少なくとも1つの動きベクトルを生成する手段と、を含み、
前記少なくとも1つの動きベクトルは、補正グローバル動きベクトルである、請求項49に記載の動き補償フレームレートコンバータ。
【請求項55】
前記現在のフレームに対してセグメンテーションマスクおよびオブジェクトエッジ強さマップの少なくとも1つを適用する手段に基づいて、前記第2領域を決定する手段をさらに備える、請求項49に記載の動き補償フレームレートコンバータ。
【請求項56】
補正グローバル動きベクトルおよびローカル動きベクトルの適用により生成されたエラーのうち小さいほうに基づき、前記補正グローバル動きベクトルおよび前記ローカル動きベクトルのいずれかを利用して、前記第2領域の動きを補償する手段をさらに備える、請求項49に記載の動き補償フレームレートコンバータ。
【請求項57】
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する手段と、
前記現在のフレームと前記参照フレームとを位相相関させる手段と、
前記位相相関に基づいて前記現在のフレームと前記参照フレームとの間のグローバル並進動きを推定する少なくとも1つのアフィンパラメータを計算する手段と、を備える、グローバル並進推定モジュール。
【請求項58】
前記現在のフレームと前記参照フレームとを位相相関させる手段は、
デシメーションファクタにより前記現在のフレームおよび前記参照フレームをそれぞれデシメーションする手段と、
前記デシメーションされた現在のフレームおよび参照フレームをフーリエ変換する手段と、
前記変換された現在のフレームに相関する位相を、前記変換された参照フレームに相関する位相から減算して、位相差アレイを生成する手段と、
前記位相差アレイの指数を逆フーリエ変換して、相関面を生成する手段と、をさらに含む請求項57に記載のグローバル並進推定モジュール。
【請求項59】
前記相関面の最大値と前記相関面の前記最大値の位置とを決定する手段をさらに備え、
前記最大値と前記最大値の位置とを利用して、前記少なくとも1つのアフィンパラメータを計算する、請求項58に記載のグローバル並進推定モジュール。
【請求項60】
前記デシメーションファクタは1、4、および9のいずれかである、請求項59に記載のグローバル並進推定モジュール。
【請求項61】
前記少なくとも1つのアフィンパラメータは、前記グローバル並進推定モジュールに連結されたアフィンパラメータリファインモジュールに提供され、
前記アフィンパラメータリファインモジュールは、
前記少なくとも1つのアフィンパラメータに基づいて前記参照フレームを更新する手段と、
前記更新された参照フレームと前記現在のフレームとの間の差を求める手段と、
前記少なくとも1つのアフィンパラメータをリファインして前記差を最小にする手段と、を含む、請求項59に記載のグローバル並進推定モジュール。
【請求項62】
現在のフレームの前景領域および背景領域を特定するセグメンテーションマスクを生成する手段と、
前記現在のフレームの大きなエッジ強さを有する領域を特定するオブジェクトエッジ強さマップを生成する手段と、
対象領域との関連で、前記前景領域、前記背景領域、および前記大きなエッジ強さを有する領域に基づいて、前記対象領域について少なくとも1つの動きベクトルを計算する手段と、を備える、ローカル動き補正モジュール。
【請求項63】
前記少なくとも1つの動きベクトルを計算する手段は、
前記対象領域について、補正グローバル動きベクトルおよびローカル動きベクトルのうち少なくとも1つを計算する手段を含む、請求項62に記載のローカル動き補正モジュール。
【請求項64】
前記セグメンテーションマスクを生成する手段は、
前記現在のフレームと前記参照フレームとの間のグローバル動きを特徴付ける少なくとも1つのアフィンパラメータを利用して、前記参照フレームを更新する手段と、
前記更新された参照フレームと前記現在のフレームとの間の差異フレームを求める手段と、
前記差異フレームの各領域を第1閾値と比較して、前記領域を前記前景領域および前記背景領域のいずれかに分類する手段と、を含む、請求項62に記載のローカル動き補正モジュール。
【請求項65】
前記セグメンテーションマスクを生成する手段は、
前記セグメンテーションマスク内に少なくとも2つの接続された領域を有するオブジェクトを決定する手段と、
前記オブジェクトが占める面積を数量化する手段と、
前記数量化された面積を第2閾値と比較して、前記少なくとも2つの接続された領域の各々を、前記前景領域および前記背景領域のいずれかに再分類する手段と、をさらに含む、請求項64に記載のローカル動き補正モジュール。
【請求項66】
前記オブジェクトエッジ強さマップを生成する手段は、
前記現在のフレームのサブ領域の垂直方向および水平方向に相関する複数の固有値を生成する手段と、
前記複数の固有値の最大値を決定する手段と、を含み、
前記最大値が画定する範囲に実質的に在る固有値を有する前記サブ領域の各々は、大きなエッジ強さを有する領域である、請求項62に記載のローカル動き補正モジュール。
【請求項67】
メジアンフィルタ手段、エッジ適合フィルタ手段、およびガウスフィルタ手段のうち少なくとも1つを利用して、前記対象領域に対応する前記動きベクトルをフィルタにかけ、
前記対象領域は、前記現在のフレームに適用された前記セグメンテーションマスクと前記オブジェクトエッジ強さマップとの組み合わせから選択される、請求項62に記載のローカル動き補正モジュール。
【請求項68】
前記少なくとも1つの動きベクトルを利用して、前記現在のフレームと前記参照フレームとの間に動き補償されたフレームを補間する、請求項62に記載のローカル動き補正モジュール。
【請求項69】
現在のフレームと参照フレームとを少なくとも有する入力信号を受信する手段と、
前記現在のフレームと前記参照フレームとを処理する手段と、
前記処理された現在のフレームと前記処理された参照フレームとの間のグローバル動きおよびローカル動きそれぞれを特徴付けるアフィングローバル動きパラメータおよび動きベクトルのうち少なくとも1つを提供する手段と、
前記アフィングローバル動きパラメータと前記動きベクトルのうち少なくとも1つを利用して、前記処理された現在のフレームと前記処理された参照フレームとの間に少なくとも1つのフレームを補間する、動き補償補間を行う手段と、を備える、動き補償画像レートコンバータ。
【請求項70】
前記動き補償補間を行う手段からの出力信号を後処理する手段をさらに備え、
前記出力信号は、前記入力信号の本来のフレームレートより速いフレームレートを有する、請求項69に記載の動き補償画像レートコンバータ。
【請求項71】
前記処理された現在のフレームと前記処理された参照フレームとを後処理して、前記動き補償補間を行う手段へ供給すべき信号を生成する手段をさらに備え、
前記信号は、前記入力信号の本来のフレームレートに略等しいフレームレートを有するよう適合される、請求項69に記載の動き補償画像レートコンバータ。
【請求項72】
前記現在のフレームと前記参照フレームとを処理する手段は、
前記現在のフレームと前記参照フレームとに対してノイズ低減およびデインターレースのうち少なくとも1つを行う手段を含む、請求項69に記載の動き補償画像レートコンバータ。
【図1】

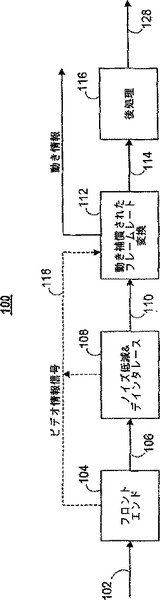
【図2】
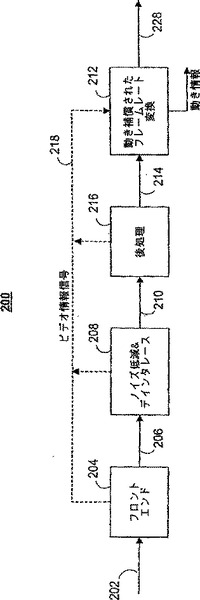
【図3】
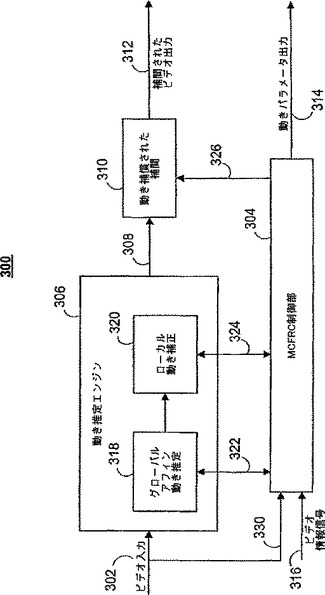
【図4】
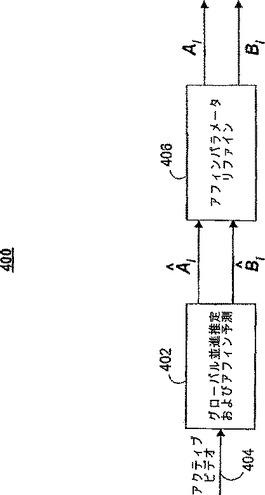
【図5】
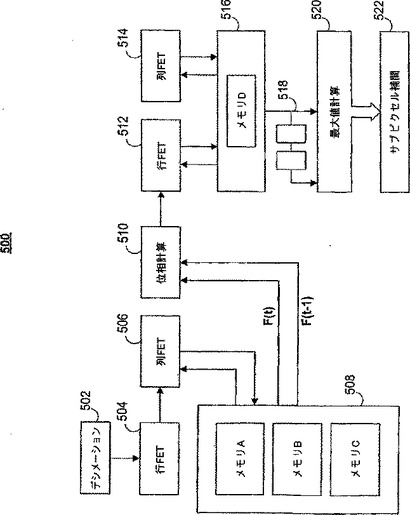
【図6】
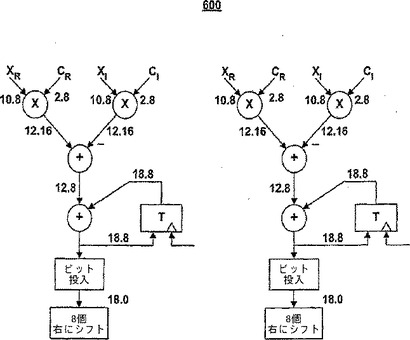
【図7】
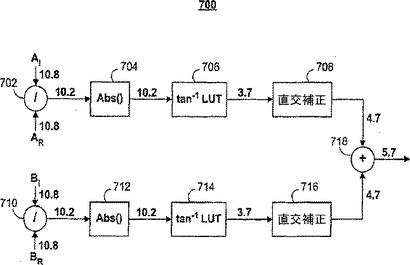
【図8】
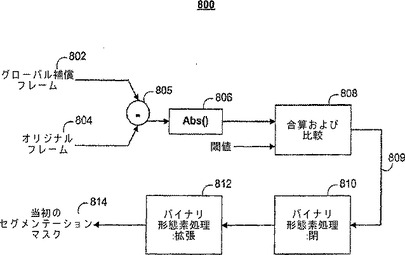
【図9】
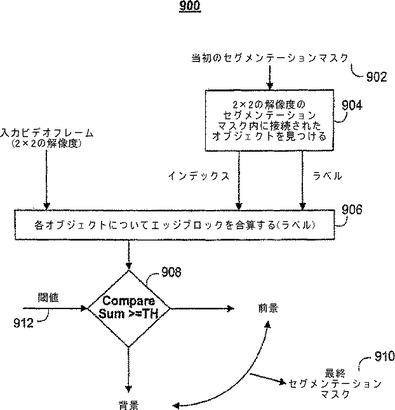
【図10】
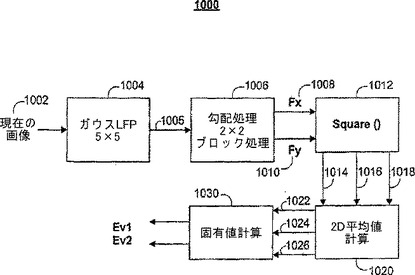
【図11】
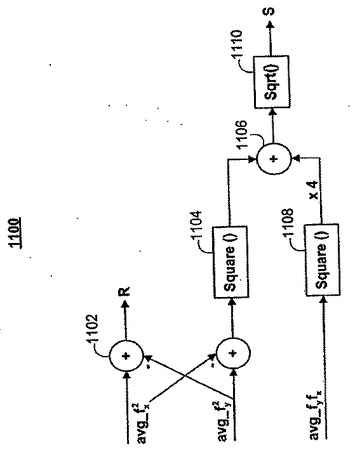
【図12】
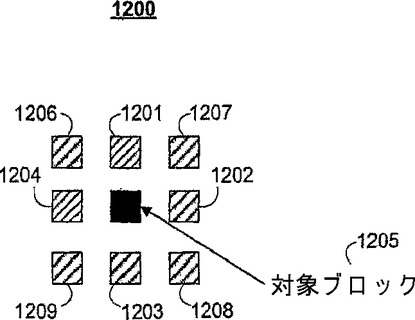
【図13】
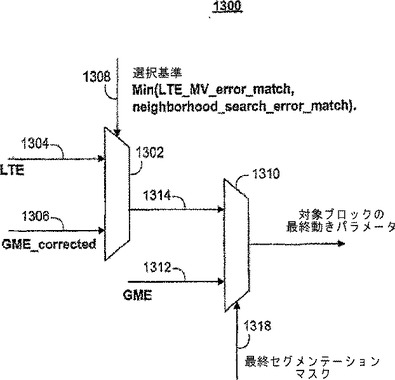
【図14】
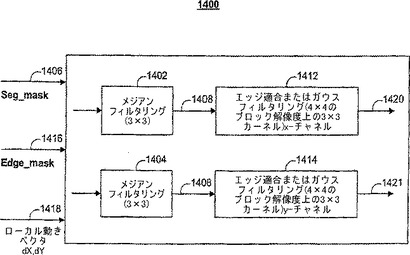
【図15】
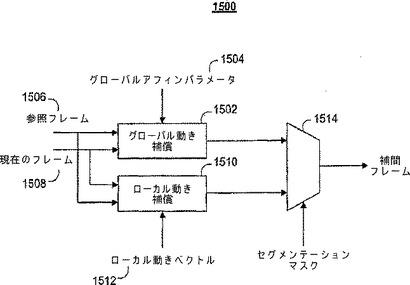
【図16A】
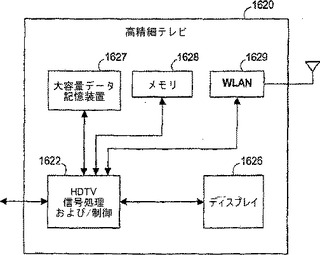
【図16B】
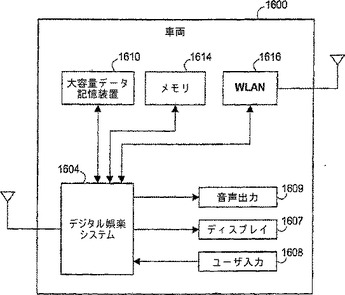
【図16C】
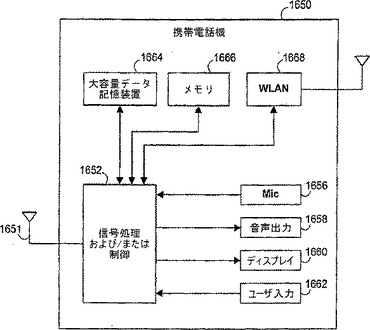
【図16D】
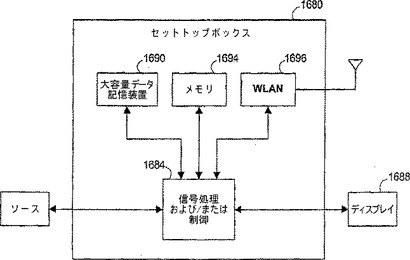
【図16E】
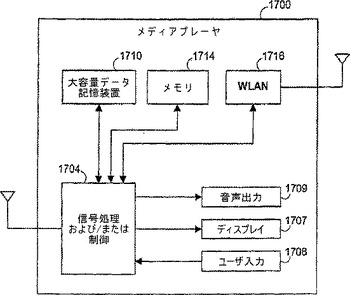
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16A】
【図16B】
【図16C】
【図16D】
【図16E】
【公開番号】特開2013−48465(P2013−48465A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−231573(P2012−231573)
【出願日】平成24年10月19日(2012.10.19)
【分割の表示】特願2009−518177(P2009−518177)の分割
【原出願日】平成19年6月22日(2007.6.22)
【出願人】(502188642)マーベル ワールド トレード リミテッド (302)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2012−231573(P2012−231573)
【出願日】平成24年10月19日(2012.10.19)
【分割の表示】特願2009−518177(P2009−518177)の分割
【原出願日】平成19年6月22日(2007.6.22)
【出願人】(502188642)マーベル ワールド トレード リミテッド (302)
【Fターム(参考)】
[ Back to top ]