
動作再現方法、動作再現システム及び動作再現プログラム
【課題】少ない情報量で効率良く且つ精度良く搬送システムの動作を再現することができる動作再現方法、動作再現システム及び動作再現プログラムを提供する。
【解決手段】動作再現システム1は、動作ログを読み込む動作ログ読込部12と、状況ログを読み込む状況ログ読込部10と、状況ログ読込部10によって読み込まれた状況ログの中から、直前状況ログを抽出し、直前状況ログから状況情報を取得する状況情報取得部11と、動作ログ読込部によって読み込まれた動作ログの中から、直前状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、動作ログから動作情報を取得する動作情報取得部13と、動作情報を用いて状況情報を再現時点まで時系列に更新することによって、再現時点における搬送システムの動作を再現する動作再現部14とを備える。
【解決手段】動作再現システム1は、動作ログを読み込む動作ログ読込部12と、状況ログを読み込む状況ログ読込部10と、状況ログ読込部10によって読み込まれた状況ログの中から、直前状況ログを抽出し、直前状況ログから状況情報を取得する状況情報取得部11と、動作ログ読込部によって読み込まれた動作ログの中から、直前状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、動作ログから動作情報を取得する動作情報取得部13と、動作情報を用いて状況情報を再現時点まで時系列に更新することによって、再現時点における搬送システムの動作を再現する動作再現部14とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送システムの動作を再現する動作再現方法、動作再現システム及び動作再現プログラムに関する。
【背景技術】
【0002】
システムに不具合などが生じた場合、その不具合の原因究明や対策のために、不具合が生じた時のシステムの動作を再現して検証することが行われている。例えば特許文献1に記載の再現方法では、製造装置から出力された動作ログから抽出キーを使ってパラメータの値を抽出し、このパラメータの値を処理することによって状態再現情報を生成して、状態再現情報に基づいて製造装置の状態を再現している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−238763号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、動作の再現を行う場合には、動作開始ポイントが必要となるが、システム起動時など、動作ログの取得が開始された時を動作開始ポイントとして動作を再現させるようにすると、システム起動時から不具合発生時までの動作時間が長くなるに従って、処理すべき動作ログが多くなる。そのため、当該動作時間が長くなると、動作を再現するために扱う情報量が多くなり、再現処理の負荷が増大したり、実際の動作との間にずれが生じたりするおそれがある。
【0005】
本発明は、上記課題を解決するためになされたものであり、少ない情報量で効率良く且つ精度良く搬送システムの動作を再現することができる動作再現方法、動作再現システム及び動作再現プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明に係る動作再現方法は、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現方法であって、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込ステップと、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込ステップと、状況ログ読込ステップにおいて読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得ステップと、動作ログ読込ステップにおいて読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得ステップと、動作情報取得ステップにおいて取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現ステップと、を含むことを特徴とする。
【0007】
また、本発明に係る動作再現システムは、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現システムであって、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込部と、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込部と、状況ログ読込部によって読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得部と、動作ログ読込部によって読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得部と、動作情報取得部によって取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現部と、を備えることを特徴とする。
【0008】
また、本発明に係る動作再現プログラムは、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現プログラムであって、コンピュータを、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込モジュールと、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込モジュールと、状況ログ読込モジュールによって読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得モジュールと、動作ログ読込モジュールによって読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得モジュールと、動作情報取得モジュールによって取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現モジュールと、として機能させることを特徴とする。
【0009】
この動作再現方法、動作再現システム及び動作再現プログラムでは、所定時間毎に取得される状況ログを読み込み、この状況ログの中から再現時点の直前の状況ログを取得すると共に、この状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に取得する。そして、状況ログから得られる搬送システムの状況情報を動作ログから得られる時系列順の動作情報を用いて更新し、再現時点における搬送システムの動作を再現する。このように、所定時間毎に取得される状況ログを読み込むことによって、動作を再現させたい時点の直近の状況を動作開始ポイントとして動作再現の処理を行うことができる。したがって、搬送システムの初期状態を明確にすることができ、実際の動作との間にずれが生じることを抑制できるため、精度良く動作を再現できる。また、動作開始ポイントを再現時点の直前の状況ログから得ることにより、少ない情報量で動作を再現することができ、動作の再現を効率良く行うことができる。
【0010】
また、本発明に係る動作再現方法では、搬送装置は、被搬送物を収納する複数の棚と、被搬送物の入出庫を行うポートと、棚とポートとの間において被搬送物を移載する移載装置とを有する保管装置を含み、制御装置は、保管装置を制御する保管制御装置を含み、動作ログは、保管装置の搬送に係る搬送ログ、保管装置における相互通信に係る通信ログ及び保管装置のアラームに係るアラームログを含み、状況ログは、棚に収納されている被搬送物の状態、ポートの入出庫状態、移載装置の状態、及び搬送指示装置からの搬送指令の受信状態の各々に係るログを含んでいることが好ましい。このように、上記内容を含む動作ログ及び状況ログを用いることにより、保管装置を含む搬送システムの動作の再現を行うことができる。
【発明の効果】
【0011】
本発明によれば、少ない情報量で効率良く且つ精度良く搬送システムの動作を再現することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る動作再現システムの構成を示す図である。
【図2】搬送システムの動作を再現させるシミュレータの構成を示す図である。
【図3】搬送システムを含む半導体製造システムの構成を示す図である。
【図4】動作再現システムの動作を示すフローチャートである。
【図5】状況ログを説明するための図である。
【図6】直前状況ログの一例を示す図である。
【図7】動作ログの一例を示す図である。
【図8】搬送システムの状況の一例を示す図である。
【図9】再現日時における搬送システムの状況の一例を示す図である。
【図10】一実施形態に係る動作再現方法を実行することができるプログラムを示すブロック図である。
【図11】記録媒体に記録されたプログラムを実行するためのコンピュータのハードウェア構成を示す図である。
【図12】記録媒体に記憶されたプログラムを実行するためのコンピュータを示す図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同一又は相当要素には同一符号を付し、重複する説明は省略する。
【0014】
図1は、本発明の一実施形態に係る動作再現システムの構成を示す図であり、図2は、搬送システムの動作を再現させるシミュレータの構成を示す図である。また、図3は、搬送システムを含む半導体製造システムの構成を示す図である。
【0015】
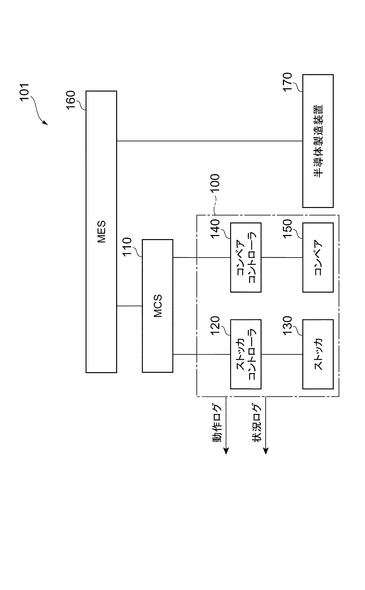
最初に、動作の再現が行われる搬送システム100について説明する。図3に示すように、搬送システム100は、半導体製造システム101に含まれている。搬送システム100は、被搬送物を搬送するためのシステムである。被搬送物は、複数の半導体ウェハを収納したカセット(いわゆるFOUP(Front-Opening Unified Pod))である。
【0016】
搬送システム100は、ストッカコントローラ120と、ストッカ130と、コンベアコントローラ140と、コンベア150とから構成されている。搬送システム100では、各種製造装置及びストッカ130などに対してFOUPの搬送を行うと共に、ストッカ130においてFOUPの収納或いは保管を行う。なお、搬送システム100には、上記装置以外にビークル(天井走行式無人搬送車)やビークルコントローラなどが含まれていてもよい。
【0017】
MCS(Material Control System)110は、半導体製造スケジュールに基づいてFOUPの搬送スケジュールを作成し、この搬送スケジュールに基づいて、ストッカコントローラ120及びコンベアコントローラ140に指示を行う搬送指示装置である。MCS110は、図3に示すように、ストッカコントローラ120及びコンベアコントローラ140などの工程間搬送設備とMES(Manufacturing Execution System)160との間に設けられ、MES160からの各種指示をストッカコントローラ120及びコンベアコントローラ140に適時伝達し、このストッカコントローラ120及びコンベアコントローラ140からの報告をまとめてMES160に伝達する機能を有するシステムである。なお、MES160は、工場現場における様々な情報を統括して管理する統合生産情報システムであり、MCS110及び半導体製造装置170の情報管理を行う。
【0018】
ストッカコントローラ120は、ストッカ130を制御する保管制御装置である。ストッカ130は、FOUPを保管する保管装置であり、FOUPを収納する複数の棚と、FOUPの入出庫を行うポートと、棚とポートとの間においてFOUPを移載する移載装置(いずれも図示しない)とから構成されている。ストッカコントローラ120は、MCS110の指示によりストッカ130を制御し、コンベア150との間でポートを介してFOPSの移載(入出庫)を行うと共に、ストッカ130内部におけるFUOPの搬送の制御を行う。
【0019】
コンベアコントローラ140は、コンベア150を制御する制御装置である。コンベア150は、FOUPを搬送する搬送装置である。コンベアコントローラ140は、MCS110の指示によりコンベア150を制御し、ストッカ130と半導体製造装置170との間でFOUPの搬送の制御を行う。
【0020】
搬送システム100では、動作ログ及び状況ログが取得される。動作ログは、イベント毎に各装置において取得されるデータログであり、各装置の搬送ログ、各装置相互間の通信ログ、各装置のアラームログなどを含んでいる。また、状況ログは、搬送システム100において所定時間毎(例えば1時間毎)に取得されるデータログであり、FOUPの状態、ストッカ130のポートの入出庫状態、及びMCS110からの搬送指示の受信状態などを示すログを含んでいる。動作ログ及び状況ログの詳細は後述する。
【0021】
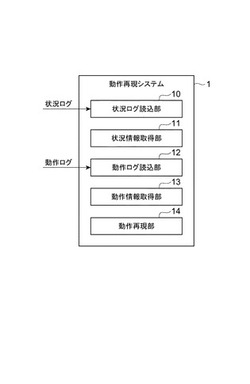
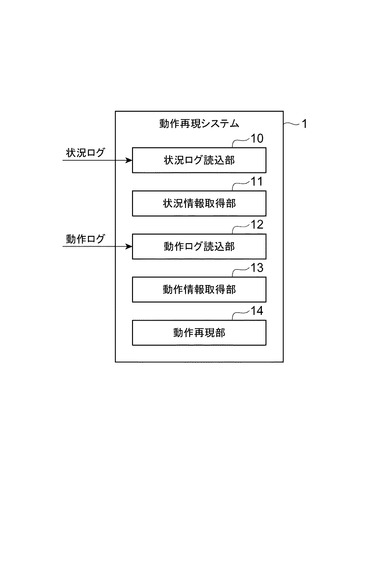
続いて、上述の搬送システム100の動作を再現する動作再現システム1について説明する。図1に示すように、動作再現システム1は、状況ログ読込部10と、状況情報取得部11と、動作ログ読込部12と、動作情報取得部13と、動作再現部14とを備えている。動作再現システム1は、図示しないCPU(Central Processing Unit)やROM(Read OnlyMemory)及びRAM(Random Access Memory)などから構成されるコンピュータに後述する動作再現プログラムを実行させることによって動作する。
【0022】
状況ログ読込部10は、搬送システム100(ストッカコントローラ120またはコンベアコントローラ140)から出力された状況ログを読み込む。状況ログは、上述のように搬送システム100において予め設定された所定時間毎に取得されるデータログであり、搬送システム100全体の所定時間における動作状況(FOUPの位置やステータスなど)が記録されている。状況ログ読込部10は、読み込んだ状況ログのデータを保持する。
【0023】
状況ログ読込部10は、搬送システム100から通信を介して状況ログを取得して読み込んでもよいし、搬送システム100から出力された状況ログを保持するサーバから通信によって取得して読み込んでもよい。また、状況ログ読込部10は、搬送システム100から出力された状況ログを記憶容量装置を介して取得して読み込んでもよい。
【0024】
状況情報取得部11は、状況ログから搬送システム100の状況を示す状況情報を取得する。状況情報取得部11は、状況ログ読込部10において保持されている状況ログの中から、再現日時(再現時点)の直前に取得された状況ログを取得する。
【0025】
具体的には、状況情報取得部11は、例えば設定された再現日時が「X月Y日 13:30」である場合、複数の状況ログの中から、直前に取得された例えば「X月Y日 13:00」の状況ログを直前状況ログとして抽出して取得する。状況情報取得部11は、直前状況ログを取得すると、この直前状況ログから搬送システム100の動作状況を示す状況情報を取得する。状況情報は、状況ログが取得された日時(時点)における搬送システム100全体の各装置の動作状況を示す情報である。状況情報取得部11は、状況情報を動作再現部14に出力する。
【0026】
動作ログ読込部12は、搬送システム100から出力された動作ログを読み込む。動作ログは、上述のように搬送システム100において所定のイベント毎に取得されるデータログであり、搬送システム100における各装置の動作状態が記録されている。動作ログ読込部12は、読み込んだ動作ログのデータを保持する。
【0027】
動作ログ読込部12は、状況ログ読込部10と同様に、搬送システム100から通信を介して動作ログを取得して読み込んでもよいし、搬送システム100から出力された動作ログを保持するサーバから通信によって取得して読み込んでもよい。また、動作ログ読込部12は、搬送システム100から出力された動作ログを記憶容量装置を介して取得して読み込んでもよい。
【0028】
動作情報取得部13は、直前状況ログが取得された日時から再現日時までに取得された動作ログを取得し、この動作ログから搬送システム100の各装置の動作を示す動作情報を取得する。動作情報取得部13は、動作ログ読込部12において保持されている動作ログのデータの中から、直前状況ログが取得された日時から再現日時までの動作ログを時系列順に取得する。具体的には、動作情報取得部13は、例えば再現日時が「X月Y日 13:30」であり、直前状況ログが取得された日時が「X月Y日 13:00」である場合には、「13:00〜13:30」までに取得された動作ログを時系列順に抽出して取得する。
【0029】
動作情報取得部13は、抽出して取得した動作ログに基づいて、搬送システム100の各装置の動作状態を示す動作情報を時系列順に取得する。動作情報は、イベント発生時における各装置の動作状態を示す情報である。動作情報取得部13は、取得した動作情報を動作再現部14に出力する。
【0030】
動作再現部14は、動作情報取得部13によって取得された動作情報を用いて状況情報を再現日時まで更新することによって、再現日時における搬送システム100の動作を再現する。動作再現部14は、状況情報取得部11から出力された状況情報、及び動作情報取得部13から出力された動作情報を受け取ると、状況情報が示す状況から動作情報に基づいて時系列順(13:00〜13:30)に状況情報を更新し、再現日時における搬送システム100の動作を再現する。動作再現部14は、以下で説明するシミュレータ20を動作させることによって搬送システム100の動作を再現する。
【0031】
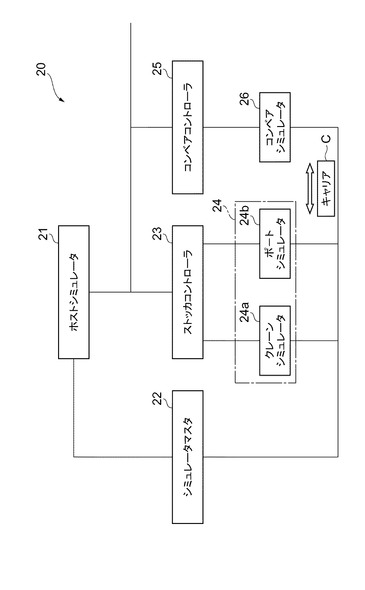
動作再現システム1による再現動作を実行させるシミュレータ20について、図2を参照して説明する。図2に示すシミュレータ20は、コンピュータにおいて実行されるアプリケーションであり、搬送システム100の仮想マシンを構成している。シミュレータ20は、ホストシミュレータ21と、シミュレータマスタ22と、ストッカコントローラ23と、ストッカシミュレータ24と、コンベアコントローラ25と、コンベアシミュレータ26とを備えている。ストッカコントローラ23は、クレーンシミュレータ24a及びポートシミュレータ24bから構成されている。シミュレータ20では、ストッカシミュレータ24とコンベアシミュレータ26との間で仮想のキャリアC(FOUP)の搬送(受け渡し)が行われる。
【0032】
図2に示すシミュレータ20において、ホストシミュレータ21は、MCS110の仮想マシンとして動作する。また、ストッカコントローラ23及びコンベアコントローラ25は、ストッカコントローラ120及びコンベアコントローラ140の仮想マシンとして動作する。また、クレーンシミュレータ24a及びポートシミュレータ24bは、ストッカ130の仮想マシンとして動作し、コンベアシミュレータ26は、コンベア150の仮想マシンとして動作する。
【0033】
シミュレータ20において、動作再現システム1は、シミュレータマスタ22として機能する。すなわち、動作再現システム1の動作は、シミュレータマスタ22において実行される。シミュレータマスタ22は、ストッカコントローラ23及びコンベアコントローラ25に状況情報に係るデータ(動作ログに対応するデータ)を出力する。これに応じて、ストッカシミュレータ24及びコンベアシミュレータ26が動作する。
【0034】
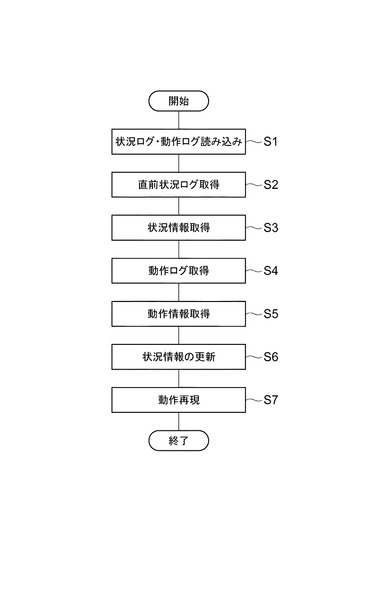
続いて、上述した動作再現システム1における搬送システムの動作再現方法について、図4を参照しながら説明する。図4は、動作再現システムの動作を示すフローチャートである。なお、以下では、搬送システム100におけるストッカコントローラ120の動作の再現を一例に説明する。
【0035】
まず、搬送システム100の動作を再現するにあたり、動作を再現させたい再現日時が作業者や操作者によって入力される(再現日時入力ステップ)。動作再現システム1では、再現日時(例えばX月Y日 13:30)の入力を受け付けると、まず状況ログ読込部10及び動作ログ読込部12において搬送システム100から出力された状況ログ及び動作ログが読み込まれる(ステップS1、動作ログ読込ステップ、状況ログ読込ステップ)。
【0036】
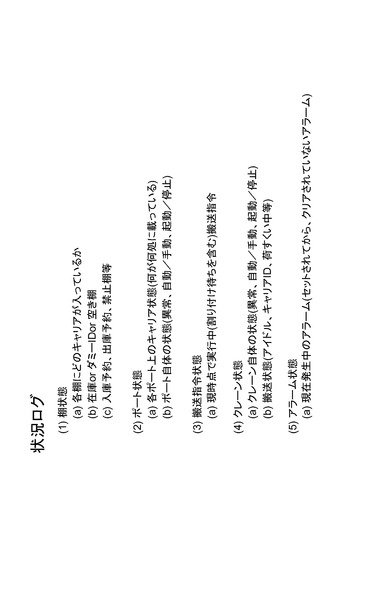
ここで、状況ログについて、図5を参照して説明する。図5に示すように、状況ログは、複数(ここでは5つ)の情報を含んでおり、例えば「棚状態」、「ポート状態」、「搬送指令状態」、「クレーン状態」及び「アラーム状態」を含んでいる。各情報には、それぞれの状態を示す状態情報が記録されている。具体的には、例えば「ポート状態」を示す情報には、「(a)各ポート上のキャリアの状態(何が何処に載っている)」、「(b)ポート自体の状態(異常、自動/手動、起動/停止)」などのポートの状態を示す情報が記録されている。状況ログにおける情報の集合により、搬送システム100の動作状態に係る状況情報が構成されている。
【0037】
図4に戻って、状況ログが読み込まれると、この状況ログの中から、再現日時(X月Y日 13:30)の直前に取得された状況ログが状況情報取得部11によって取得される(ステップS2)。具体的には、例えば再現日時が「X月Y日 13:30」に設定されており、搬送システム100において状況ログが「…,12:00,13:00,14:00,…」のように一時間毎に取得されている場合には、「13:30」の直前の「13:00」に取得された状況ログが直前状況ログとして抽出されて取得される。
【0038】
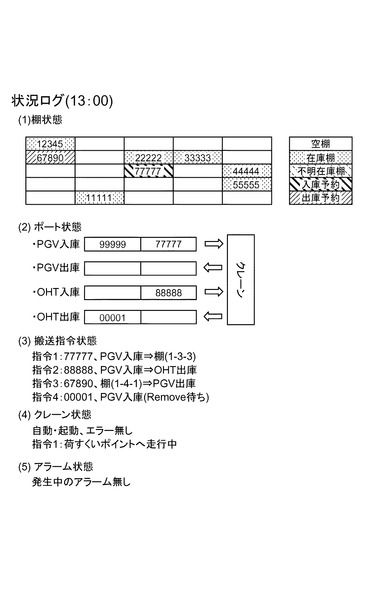
続いて、状況情報取得部11において、直前状況ログから搬送システム100の動作状況を示す状況情報が取得される(ステップS3、状況情報取得ステップ)。具体的には、図6を参照して説明する。図6は、直前状況ログの一例を示す図である。図6に示すように、「13:00」に取得された状況ログに記録されている情報が、搬送システム100の「13:00」時点での状態を示している。より詳細には、例えばストッカ130には、図示されているID(例えば、12345,22222,…)を有するFUOPが各棚に収容されていることが示されている。なお、図6において、OHT(Over head Hoist Transport)は搬送車であり、PGV(PersonalGuided Vehicle)は人力台車を示している。
【0039】
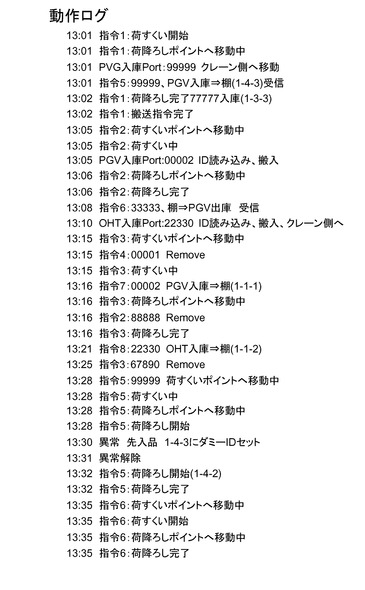
図4に戻って、次に、動作ログ読込部12によって読み込まれた動作ログの中から、直前状況ログが取得された日時から再現日時までの動作ログが動作情報取得部13によって時系列順に取得される(ステップS4)。図7は、動作ログの一例を示す図である。図7では、「13:01〜13:35」までの動作ログが取得されている。図7に示す動作ログでは、例えば「13:01 指令1:荷降ろしポイントへ移動中」などといった情報が記録されている。そして、直前状況ログが取得された日時から再現日時までの動作ログが時系列順に取得されると、動作情報取得部13によって、動作ログから動作情報が時系列順に取得される(ステップS5、動作情報取得ステップ)。
【0040】
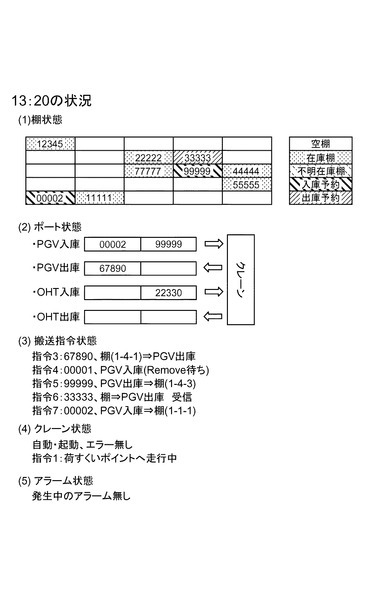
続いて、動作再現部14によって、動作情報を用いて状況情報が更新される(ステップS6)。具体的には、シミュレータ20上で状況情報が示す搬送システム100の状況(図6に示す状況)が再現され、この状況から時系列順の動作情報に応じて例えば「13:20」まで仮想の搬送システム100の状況が更新される。すなわち、搬送システム100の「13:00」時点の状況から「13:20」時点の状況まで、シミュレータ20上の仮想の搬送システム100の動作が進められる。このとき、シミュレータマスタ22は、シミュレータ20のストッカシミュレータ24(クレーンシミュレータ24a及びポートシミュレータ24b)の動作が実際のストッカ130の動作に近づくように、タイマーなどの調整を行う。なお、状況を更新する速度は、実際に搬送システム100が動作する速度に合わせてもよいし、実際の動作速度よりも速くしてもよい。
【0041】
図8に、このときのシミュレータ20上の仮想の搬送システム100の状態を示す。同図に示すように、「13:20」時点におけるシミュレータ20上の仮想の搬送システム100は、図7に示す動作ログに基づいて「13:00」時点の状況よりも各装置の状態が進められている。
【0042】
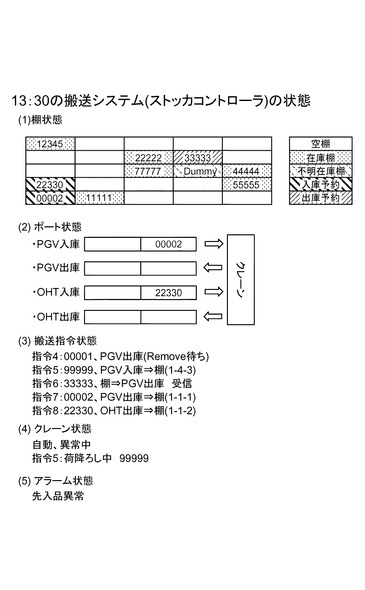
そして、動作再現部14によって、シミュレータ20上の仮想の搬送システム100の状況が更に進められ、再現日時における搬送システム100の状況がシミュレータ20上において再現される(ステップS7、動作再現ステップ)。図9は、再現日時における搬送システム(ストッカ)の状況を示す図である。図9に示すように、再現日時における搬送システム100では、「アラーム状態」において、「先入品異常」が発生している。このように、動作再現システム1によりシミュレータ20を動作させることよって、不具合が発生したときの搬送システム100の状態を再現させることができる。
【0043】
以上説明したように、動作再現システム1では、状況ログ読込部10によって所定時間毎に取得される状況ログを読み込み、状況情報取得部11によって状況ログの中から再現時点に直近の直前状況ログを取得すると共に、動作情報取得部13によって直前状況ログが取得された日時から再現日時までに取得された動作ログを時系列順に取得する。そして、動作再現部14によって、直前状況ログから得られる搬送システム100の状況情報を動作ログから得られる時系列順の動作情報を用いて更新し、再現日時における搬送システム100の動作を再現する。このように、搬送システム100において所定時間毎に取得される状況ログを読み込むことによって、動作を再現させたい日時の直近の状況を動作開始ポイントとして動作再現の処理を行うことができる。したがって、搬送システム100の初期状態を明確にすることができ、実際の動作との間にずれが生じることを抑制できるため、精度良く動作の再現を行うことができ信頼性の向上を図ることができる。また、動作開始ポイントを再現時点の直前の状況ログから得ることにより、少ない情報量で動作を再現することができ、動作の再現を効率良く行うことができる。
【0044】
また、動作ログは、各装置の搬送ログ、各装置相互間の通信ログ、各装置のアラームログを少なくとも含んでおり、状況ログは、FOUPの状態、ストッカ130のポートの入出庫状態、及びMCS110からの搬送指示の受信状態を示すログを少なくとも含んでいる。このような情報を含む動作ログ及び状況ログを用いることにより、動作再現システム1では、ストッカ130を含む搬送システム100の動作を的確に再現することができる。
【0045】
本実施形態に係る動作再現方法を、プログラムとして記録媒体に格納して提供することもできる。記録媒体としては、フロッピーディスク(登録商標)、CD−ROM、DVD、あるいはROMなどの記録媒体、あるいは半導体メモリなどが例示される。
【0046】
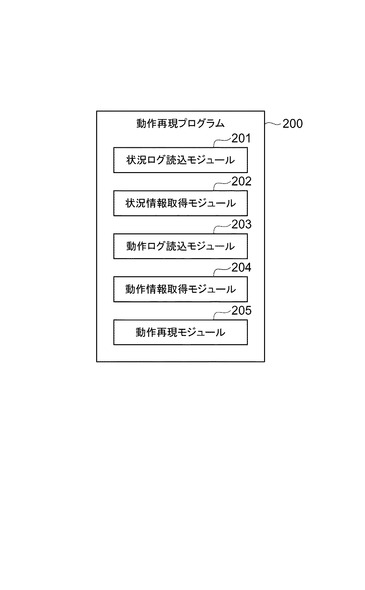
図10は、動作再現システム1において動作再現方法を実行することができるプログラムのモジュールを示すブロック図である。動作再現プログラム200は、状況ログ読込モジュール201と、状況情報取得モジュール202と、動作ログ読込モジュール203と、動作情報取得モジュール204と、動作再現モジュール205とを備えている。上記各モジュールがコンピュータで実行されることにより実現される機能は、上述した動作再現システム1の機能と同じである。すなわち、状況ログ読込モジュール201、状況情報取得モジュール202、動作ログ読込モジュール203、動作情報取得モジュール204及び動作再現モジュール205は、状況ログ読込部10、状況情報取得部11、動作ログ読込部12、動作情報取得部13及び動作再現部14とそれぞれ同様の機能をコンピュータに実行させる。
【0047】
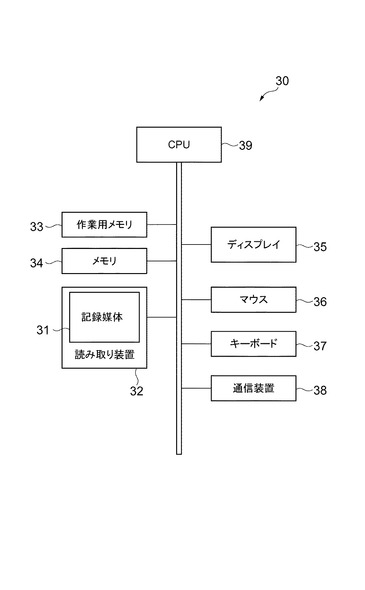
このように構成された動作再現プログラム200は、記録媒体に記憶され、コンピュータで実行される。図11は、記録媒体に記憶されたプログラムを実行するためのコンピュータのハードウェア構成を示す図であり、図12は、記録媒体に記憶されたプログラムを実行するためのコンピュータを示す図である。
【0048】
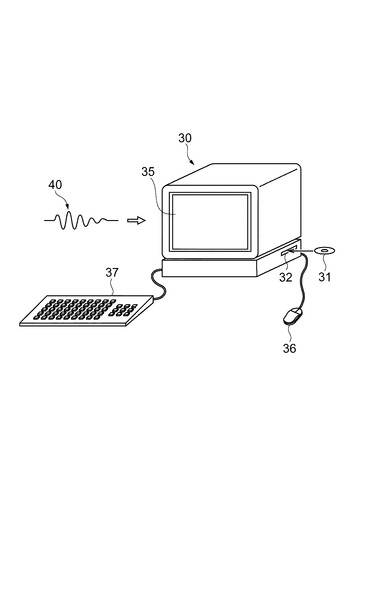
図11に示すように、コンピュータ30は、フロッピーディスクドライブ装置、CD−ROMドライブ装置、DVDドライブ装置などの読取装置32と、オペレーティングシステムを常駐させた作業用メモリ(RAM)33と、記録媒体31に記憶されたプログラムを記憶するメモリ34と、ディスプレイといった表示装置35と、入力装置であるマウス36及びキーボード37と、データなどの送受を行うための通信装置38と、プログラムの実行を制御するCPU39とを備えている。コンピュータ30は、記録媒体31が読取装置32に挿入されると、読取装置32から記録媒体31に格納された動作再現プログラムにアクセス可能になり、当該動作再現によって、本実施形態に係る動作再現システムとして動作することが可能になる。
【0049】
図12に示すように、動作再現プログラムは、搬送波に重畳されたコンピュータデータ信号40としてネットワークを介して提供されるものであってもよい。この場合、コンピュータ30は、通信装置38によって受信した動作再現プログラムをメモリ34に格納し、当該動作再現プログラムを実行することができる。
【0050】
本発明は、上記実施形態に限定されるものではない。例えば、上記実施形態では、シミュレータ20によって搬送システム100の動作を再現しているが、搬送システム100の実機によって動作を再現させてもよい。
【0051】
また、上記実施形態では、動作再現システム1において状況ログ読込部10と動作ログ読込部12とに機能を分けて状況ログ及び動作ログをそれぞれ読み込んでいるが、状況ログ読込部10又は動作ログ読込部12のいずれか一方において状況ログ及び動作ログの両方を読み込んで保持してもよい。要は、搬送システム100から出力された状況ログ及び動作ログを読み込む機能を有していればよい。
【0052】
また、上記実施形態では、搬送システム100がストッカ130及びコンベア150を備えている構成を例示したが、搬送システム100は、その他に天井走行式無人搬送車(ビークル)、無人搬送車などを備えていてもよい。この場合、シミュレータ20も搬送システム100の構成に応じた構成とすればよい。
【0053】
また、搬送システム100から出力される動作ログ及び状況ログには、上述の情報が記録されたログだけでなく、搬送システム100の動作に係るその他の情報を示すログが含まれていてもよい。
【符号の説明】
【0054】
1…動作再現システム、10…状況ログ読込部、11…状況情報取得部、12…動作ログ読込部、13…動作情報取得部、14…動作再現部、100…搬送システム、110…MCS(搬送指示装置)、120…ストッカコントローラ(保管制御装置)、130…ストッカ(保管装置)、140…コンベアコントローラ(制御装置)、150…コンベア(搬送装置)、200…動作再現プログラム、201…状況ログ読込モジュール、202…状況情報取得モジュール、203…動作ログ読込モジュール、204…動作情報取得モジュール、205…動作再現モジュール、C…キャリア(被搬送物)。
【技術分野】
【0001】
本発明は、搬送システムの動作を再現する動作再現方法、動作再現システム及び動作再現プログラムに関する。
【背景技術】
【0002】
システムに不具合などが生じた場合、その不具合の原因究明や対策のために、不具合が生じた時のシステムの動作を再現して検証することが行われている。例えば特許文献1に記載の再現方法では、製造装置から出力された動作ログから抽出キーを使ってパラメータの値を抽出し、このパラメータの値を処理することによって状態再現情報を生成して、状態再現情報に基づいて製造装置の状態を再現している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−238763号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、動作の再現を行う場合には、動作開始ポイントが必要となるが、システム起動時など、動作ログの取得が開始された時を動作開始ポイントとして動作を再現させるようにすると、システム起動時から不具合発生時までの動作時間が長くなるに従って、処理すべき動作ログが多くなる。そのため、当該動作時間が長くなると、動作を再現するために扱う情報量が多くなり、再現処理の負荷が増大したり、実際の動作との間にずれが生じたりするおそれがある。
【0005】
本発明は、上記課題を解決するためになされたものであり、少ない情報量で効率良く且つ精度良く搬送システムの動作を再現することができる動作再現方法、動作再現システム及び動作再現プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明に係る動作再現方法は、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現方法であって、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込ステップと、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込ステップと、状況ログ読込ステップにおいて読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得ステップと、動作ログ読込ステップにおいて読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得ステップと、動作情報取得ステップにおいて取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現ステップと、を含むことを特徴とする。
【0007】
また、本発明に係る動作再現システムは、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現システムであって、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込部と、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込部と、状況ログ読込部によって読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得部と、動作ログ読込部によって読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得部と、動作情報取得部によって取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現部と、を備えることを特徴とする。
【0008】
また、本発明に係る動作再現プログラムは、被搬送物を搬送する搬送装置と、搬送装置の動作を制御する制御装置と、制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現プログラムであって、コンピュータを、搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込モジュールと、搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込モジュールと、状況ログ読込モジュールによって読み込まれた状況ログの中から、搬送システムの動作を再現する再現時点の直前に取得された状況ログを抽出し、抽出した状況ログから、搬送システムの状況を示す状況情報を取得する状況情報取得モジュールと、動作ログ読込モジュールによって読み込まれた動作ログの中から、再現時点の直前の状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に抽出し、抽出した動作ログから、搬送システムの動作を示す動作情報を取得する動作情報取得モジュールと、動作情報取得モジュールによって取得された動作情報を用いて状況情報を再現時点まで時系列順に更新することによって、再現時点における搬送システムの動作を再現する動作再現モジュールと、として機能させることを特徴とする。
【0009】
この動作再現方法、動作再現システム及び動作再現プログラムでは、所定時間毎に取得される状況ログを読み込み、この状況ログの中から再現時点の直前の状況ログを取得すると共に、この状況ログが取得された時点から再現時点までに取得された動作ログを時系列順に取得する。そして、状況ログから得られる搬送システムの状況情報を動作ログから得られる時系列順の動作情報を用いて更新し、再現時点における搬送システムの動作を再現する。このように、所定時間毎に取得される状況ログを読み込むことによって、動作を再現させたい時点の直近の状況を動作開始ポイントとして動作再現の処理を行うことができる。したがって、搬送システムの初期状態を明確にすることができ、実際の動作との間にずれが生じることを抑制できるため、精度良く動作を再現できる。また、動作開始ポイントを再現時点の直前の状況ログから得ることにより、少ない情報量で動作を再現することができ、動作の再現を効率良く行うことができる。
【0010】
また、本発明に係る動作再現方法では、搬送装置は、被搬送物を収納する複数の棚と、被搬送物の入出庫を行うポートと、棚とポートとの間において被搬送物を移載する移載装置とを有する保管装置を含み、制御装置は、保管装置を制御する保管制御装置を含み、動作ログは、保管装置の搬送に係る搬送ログ、保管装置における相互通信に係る通信ログ及び保管装置のアラームに係るアラームログを含み、状況ログは、棚に収納されている被搬送物の状態、ポートの入出庫状態、移載装置の状態、及び搬送指示装置からの搬送指令の受信状態の各々に係るログを含んでいることが好ましい。このように、上記内容を含む動作ログ及び状況ログを用いることにより、保管装置を含む搬送システムの動作の再現を行うことができる。
【発明の効果】
【0011】
本発明によれば、少ない情報量で効率良く且つ精度良く搬送システムの動作を再現することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る動作再現システムの構成を示す図である。
【図2】搬送システムの動作を再現させるシミュレータの構成を示す図である。
【図3】搬送システムを含む半導体製造システムの構成を示す図である。
【図4】動作再現システムの動作を示すフローチャートである。
【図5】状況ログを説明するための図である。
【図6】直前状況ログの一例を示す図である。
【図7】動作ログの一例を示す図である。
【図8】搬送システムの状況の一例を示す図である。
【図9】再現日時における搬送システムの状況の一例を示す図である。
【図10】一実施形態に係る動作再現方法を実行することができるプログラムを示すブロック図である。
【図11】記録媒体に記録されたプログラムを実行するためのコンピュータのハードウェア構成を示す図である。
【図12】記録媒体に記憶されたプログラムを実行するためのコンピュータを示す図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照して、本発明の好適な実施形態について詳細に説明する。なお、図面の説明において同一又は相当要素には同一符号を付し、重複する説明は省略する。
【0014】
図1は、本発明の一実施形態に係る動作再現システムの構成を示す図であり、図2は、搬送システムの動作を再現させるシミュレータの構成を示す図である。また、図3は、搬送システムを含む半導体製造システムの構成を示す図である。
【0015】
最初に、動作の再現が行われる搬送システム100について説明する。図3に示すように、搬送システム100は、半導体製造システム101に含まれている。搬送システム100は、被搬送物を搬送するためのシステムである。被搬送物は、複数の半導体ウェハを収納したカセット(いわゆるFOUP(Front-Opening Unified Pod))である。
【0016】
搬送システム100は、ストッカコントローラ120と、ストッカ130と、コンベアコントローラ140と、コンベア150とから構成されている。搬送システム100では、各種製造装置及びストッカ130などに対してFOUPの搬送を行うと共に、ストッカ130においてFOUPの収納或いは保管を行う。なお、搬送システム100には、上記装置以外にビークル(天井走行式無人搬送車)やビークルコントローラなどが含まれていてもよい。
【0017】
MCS(Material Control System)110は、半導体製造スケジュールに基づいてFOUPの搬送スケジュールを作成し、この搬送スケジュールに基づいて、ストッカコントローラ120及びコンベアコントローラ140に指示を行う搬送指示装置である。MCS110は、図3に示すように、ストッカコントローラ120及びコンベアコントローラ140などの工程間搬送設備とMES(Manufacturing Execution System)160との間に設けられ、MES160からの各種指示をストッカコントローラ120及びコンベアコントローラ140に適時伝達し、このストッカコントローラ120及びコンベアコントローラ140からの報告をまとめてMES160に伝達する機能を有するシステムである。なお、MES160は、工場現場における様々な情報を統括して管理する統合生産情報システムであり、MCS110及び半導体製造装置170の情報管理を行う。
【0018】
ストッカコントローラ120は、ストッカ130を制御する保管制御装置である。ストッカ130は、FOUPを保管する保管装置であり、FOUPを収納する複数の棚と、FOUPの入出庫を行うポートと、棚とポートとの間においてFOUPを移載する移載装置(いずれも図示しない)とから構成されている。ストッカコントローラ120は、MCS110の指示によりストッカ130を制御し、コンベア150との間でポートを介してFOPSの移載(入出庫)を行うと共に、ストッカ130内部におけるFUOPの搬送の制御を行う。
【0019】
コンベアコントローラ140は、コンベア150を制御する制御装置である。コンベア150は、FOUPを搬送する搬送装置である。コンベアコントローラ140は、MCS110の指示によりコンベア150を制御し、ストッカ130と半導体製造装置170との間でFOUPの搬送の制御を行う。
【0020】
搬送システム100では、動作ログ及び状況ログが取得される。動作ログは、イベント毎に各装置において取得されるデータログであり、各装置の搬送ログ、各装置相互間の通信ログ、各装置のアラームログなどを含んでいる。また、状況ログは、搬送システム100において所定時間毎(例えば1時間毎)に取得されるデータログであり、FOUPの状態、ストッカ130のポートの入出庫状態、及びMCS110からの搬送指示の受信状態などを示すログを含んでいる。動作ログ及び状況ログの詳細は後述する。
【0021】
続いて、上述の搬送システム100の動作を再現する動作再現システム1について説明する。図1に示すように、動作再現システム1は、状況ログ読込部10と、状況情報取得部11と、動作ログ読込部12と、動作情報取得部13と、動作再現部14とを備えている。動作再現システム1は、図示しないCPU(Central Processing Unit)やROM(Read OnlyMemory)及びRAM(Random Access Memory)などから構成されるコンピュータに後述する動作再現プログラムを実行させることによって動作する。
【0022】
状況ログ読込部10は、搬送システム100(ストッカコントローラ120またはコンベアコントローラ140)から出力された状況ログを読み込む。状況ログは、上述のように搬送システム100において予め設定された所定時間毎に取得されるデータログであり、搬送システム100全体の所定時間における動作状況(FOUPの位置やステータスなど)が記録されている。状況ログ読込部10は、読み込んだ状況ログのデータを保持する。
【0023】
状況ログ読込部10は、搬送システム100から通信を介して状況ログを取得して読み込んでもよいし、搬送システム100から出力された状況ログを保持するサーバから通信によって取得して読み込んでもよい。また、状況ログ読込部10は、搬送システム100から出力された状況ログを記憶容量装置を介して取得して読み込んでもよい。
【0024】
状況情報取得部11は、状況ログから搬送システム100の状況を示す状況情報を取得する。状況情報取得部11は、状況ログ読込部10において保持されている状況ログの中から、再現日時(再現時点)の直前に取得された状況ログを取得する。
【0025】
具体的には、状況情報取得部11は、例えば設定された再現日時が「X月Y日 13:30」である場合、複数の状況ログの中から、直前に取得された例えば「X月Y日 13:00」の状況ログを直前状況ログとして抽出して取得する。状況情報取得部11は、直前状況ログを取得すると、この直前状況ログから搬送システム100の動作状況を示す状況情報を取得する。状況情報は、状況ログが取得された日時(時点)における搬送システム100全体の各装置の動作状況を示す情報である。状況情報取得部11は、状況情報を動作再現部14に出力する。
【0026】
動作ログ読込部12は、搬送システム100から出力された動作ログを読み込む。動作ログは、上述のように搬送システム100において所定のイベント毎に取得されるデータログであり、搬送システム100における各装置の動作状態が記録されている。動作ログ読込部12は、読み込んだ動作ログのデータを保持する。
【0027】
動作ログ読込部12は、状況ログ読込部10と同様に、搬送システム100から通信を介して動作ログを取得して読み込んでもよいし、搬送システム100から出力された動作ログを保持するサーバから通信によって取得して読み込んでもよい。また、動作ログ読込部12は、搬送システム100から出力された動作ログを記憶容量装置を介して取得して読み込んでもよい。
【0028】
動作情報取得部13は、直前状況ログが取得された日時から再現日時までに取得された動作ログを取得し、この動作ログから搬送システム100の各装置の動作を示す動作情報を取得する。動作情報取得部13は、動作ログ読込部12において保持されている動作ログのデータの中から、直前状況ログが取得された日時から再現日時までの動作ログを時系列順に取得する。具体的には、動作情報取得部13は、例えば再現日時が「X月Y日 13:30」であり、直前状況ログが取得された日時が「X月Y日 13:00」である場合には、「13:00〜13:30」までに取得された動作ログを時系列順に抽出して取得する。
【0029】
動作情報取得部13は、抽出して取得した動作ログに基づいて、搬送システム100の各装置の動作状態を示す動作情報を時系列順に取得する。動作情報は、イベント発生時における各装置の動作状態を示す情報である。動作情報取得部13は、取得した動作情報を動作再現部14に出力する。
【0030】
動作再現部14は、動作情報取得部13によって取得された動作情報を用いて状況情報を再現日時まで更新することによって、再現日時における搬送システム100の動作を再現する。動作再現部14は、状況情報取得部11から出力された状況情報、及び動作情報取得部13から出力された動作情報を受け取ると、状況情報が示す状況から動作情報に基づいて時系列順(13:00〜13:30)に状況情報を更新し、再現日時における搬送システム100の動作を再現する。動作再現部14は、以下で説明するシミュレータ20を動作させることによって搬送システム100の動作を再現する。
【0031】
動作再現システム1による再現動作を実行させるシミュレータ20について、図2を参照して説明する。図2に示すシミュレータ20は、コンピュータにおいて実行されるアプリケーションであり、搬送システム100の仮想マシンを構成している。シミュレータ20は、ホストシミュレータ21と、シミュレータマスタ22と、ストッカコントローラ23と、ストッカシミュレータ24と、コンベアコントローラ25と、コンベアシミュレータ26とを備えている。ストッカコントローラ23は、クレーンシミュレータ24a及びポートシミュレータ24bから構成されている。シミュレータ20では、ストッカシミュレータ24とコンベアシミュレータ26との間で仮想のキャリアC(FOUP)の搬送(受け渡し)が行われる。
【0032】
図2に示すシミュレータ20において、ホストシミュレータ21は、MCS110の仮想マシンとして動作する。また、ストッカコントローラ23及びコンベアコントローラ25は、ストッカコントローラ120及びコンベアコントローラ140の仮想マシンとして動作する。また、クレーンシミュレータ24a及びポートシミュレータ24bは、ストッカ130の仮想マシンとして動作し、コンベアシミュレータ26は、コンベア150の仮想マシンとして動作する。
【0033】
シミュレータ20において、動作再現システム1は、シミュレータマスタ22として機能する。すなわち、動作再現システム1の動作は、シミュレータマスタ22において実行される。シミュレータマスタ22は、ストッカコントローラ23及びコンベアコントローラ25に状況情報に係るデータ(動作ログに対応するデータ)を出力する。これに応じて、ストッカシミュレータ24及びコンベアシミュレータ26が動作する。
【0034】
続いて、上述した動作再現システム1における搬送システムの動作再現方法について、図4を参照しながら説明する。図4は、動作再現システムの動作を示すフローチャートである。なお、以下では、搬送システム100におけるストッカコントローラ120の動作の再現を一例に説明する。
【0035】
まず、搬送システム100の動作を再現するにあたり、動作を再現させたい再現日時が作業者や操作者によって入力される(再現日時入力ステップ)。動作再現システム1では、再現日時(例えばX月Y日 13:30)の入力を受け付けると、まず状況ログ読込部10及び動作ログ読込部12において搬送システム100から出力された状況ログ及び動作ログが読み込まれる(ステップS1、動作ログ読込ステップ、状況ログ読込ステップ)。
【0036】
ここで、状況ログについて、図5を参照して説明する。図5に示すように、状況ログは、複数(ここでは5つ)の情報を含んでおり、例えば「棚状態」、「ポート状態」、「搬送指令状態」、「クレーン状態」及び「アラーム状態」を含んでいる。各情報には、それぞれの状態を示す状態情報が記録されている。具体的には、例えば「ポート状態」を示す情報には、「(a)各ポート上のキャリアの状態(何が何処に載っている)」、「(b)ポート自体の状態(異常、自動/手動、起動/停止)」などのポートの状態を示す情報が記録されている。状況ログにおける情報の集合により、搬送システム100の動作状態に係る状況情報が構成されている。
【0037】
図4に戻って、状況ログが読み込まれると、この状況ログの中から、再現日時(X月Y日 13:30)の直前に取得された状況ログが状況情報取得部11によって取得される(ステップS2)。具体的には、例えば再現日時が「X月Y日 13:30」に設定されており、搬送システム100において状況ログが「…,12:00,13:00,14:00,…」のように一時間毎に取得されている場合には、「13:30」の直前の「13:00」に取得された状況ログが直前状況ログとして抽出されて取得される。
【0038】
続いて、状況情報取得部11において、直前状況ログから搬送システム100の動作状況を示す状況情報が取得される(ステップS3、状況情報取得ステップ)。具体的には、図6を参照して説明する。図6は、直前状況ログの一例を示す図である。図6に示すように、「13:00」に取得された状況ログに記録されている情報が、搬送システム100の「13:00」時点での状態を示している。より詳細には、例えばストッカ130には、図示されているID(例えば、12345,22222,…)を有するFUOPが各棚に収容されていることが示されている。なお、図6において、OHT(Over head Hoist Transport)は搬送車であり、PGV(PersonalGuided Vehicle)は人力台車を示している。
【0039】
図4に戻って、次に、動作ログ読込部12によって読み込まれた動作ログの中から、直前状況ログが取得された日時から再現日時までの動作ログが動作情報取得部13によって時系列順に取得される(ステップS4)。図7は、動作ログの一例を示す図である。図7では、「13:01〜13:35」までの動作ログが取得されている。図7に示す動作ログでは、例えば「13:01 指令1:荷降ろしポイントへ移動中」などといった情報が記録されている。そして、直前状況ログが取得された日時から再現日時までの動作ログが時系列順に取得されると、動作情報取得部13によって、動作ログから動作情報が時系列順に取得される(ステップS5、動作情報取得ステップ)。
【0040】
続いて、動作再現部14によって、動作情報を用いて状況情報が更新される(ステップS6)。具体的には、シミュレータ20上で状況情報が示す搬送システム100の状況(図6に示す状況)が再現され、この状況から時系列順の動作情報に応じて例えば「13:20」まで仮想の搬送システム100の状況が更新される。すなわち、搬送システム100の「13:00」時点の状況から「13:20」時点の状況まで、シミュレータ20上の仮想の搬送システム100の動作が進められる。このとき、シミュレータマスタ22は、シミュレータ20のストッカシミュレータ24(クレーンシミュレータ24a及びポートシミュレータ24b)の動作が実際のストッカ130の動作に近づくように、タイマーなどの調整を行う。なお、状況を更新する速度は、実際に搬送システム100が動作する速度に合わせてもよいし、実際の動作速度よりも速くしてもよい。
【0041】
図8に、このときのシミュレータ20上の仮想の搬送システム100の状態を示す。同図に示すように、「13:20」時点におけるシミュレータ20上の仮想の搬送システム100は、図7に示す動作ログに基づいて「13:00」時点の状況よりも各装置の状態が進められている。
【0042】
そして、動作再現部14によって、シミュレータ20上の仮想の搬送システム100の状況が更に進められ、再現日時における搬送システム100の状況がシミュレータ20上において再現される(ステップS7、動作再現ステップ)。図9は、再現日時における搬送システム(ストッカ)の状況を示す図である。図9に示すように、再現日時における搬送システム100では、「アラーム状態」において、「先入品異常」が発生している。このように、動作再現システム1によりシミュレータ20を動作させることよって、不具合が発生したときの搬送システム100の状態を再現させることができる。
【0043】
以上説明したように、動作再現システム1では、状況ログ読込部10によって所定時間毎に取得される状況ログを読み込み、状況情報取得部11によって状況ログの中から再現時点に直近の直前状況ログを取得すると共に、動作情報取得部13によって直前状況ログが取得された日時から再現日時までに取得された動作ログを時系列順に取得する。そして、動作再現部14によって、直前状況ログから得られる搬送システム100の状況情報を動作ログから得られる時系列順の動作情報を用いて更新し、再現日時における搬送システム100の動作を再現する。このように、搬送システム100において所定時間毎に取得される状況ログを読み込むことによって、動作を再現させたい日時の直近の状況を動作開始ポイントとして動作再現の処理を行うことができる。したがって、搬送システム100の初期状態を明確にすることができ、実際の動作との間にずれが生じることを抑制できるため、精度良く動作の再現を行うことができ信頼性の向上を図ることができる。また、動作開始ポイントを再現時点の直前の状況ログから得ることにより、少ない情報量で動作を再現することができ、動作の再現を効率良く行うことができる。
【0044】
また、動作ログは、各装置の搬送ログ、各装置相互間の通信ログ、各装置のアラームログを少なくとも含んでおり、状況ログは、FOUPの状態、ストッカ130のポートの入出庫状態、及びMCS110からの搬送指示の受信状態を示すログを少なくとも含んでいる。このような情報を含む動作ログ及び状況ログを用いることにより、動作再現システム1では、ストッカ130を含む搬送システム100の動作を的確に再現することができる。
【0045】
本実施形態に係る動作再現方法を、プログラムとして記録媒体に格納して提供することもできる。記録媒体としては、フロッピーディスク(登録商標)、CD−ROM、DVD、あるいはROMなどの記録媒体、あるいは半導体メモリなどが例示される。
【0046】
図10は、動作再現システム1において動作再現方法を実行することができるプログラムのモジュールを示すブロック図である。動作再現プログラム200は、状況ログ読込モジュール201と、状況情報取得モジュール202と、動作ログ読込モジュール203と、動作情報取得モジュール204と、動作再現モジュール205とを備えている。上記各モジュールがコンピュータで実行されることにより実現される機能は、上述した動作再現システム1の機能と同じである。すなわち、状況ログ読込モジュール201、状況情報取得モジュール202、動作ログ読込モジュール203、動作情報取得モジュール204及び動作再現モジュール205は、状況ログ読込部10、状況情報取得部11、動作ログ読込部12、動作情報取得部13及び動作再現部14とそれぞれ同様の機能をコンピュータに実行させる。
【0047】
このように構成された動作再現プログラム200は、記録媒体に記憶され、コンピュータで実行される。図11は、記録媒体に記憶されたプログラムを実行するためのコンピュータのハードウェア構成を示す図であり、図12は、記録媒体に記憶されたプログラムを実行するためのコンピュータを示す図である。
【0048】
図11に示すように、コンピュータ30は、フロッピーディスクドライブ装置、CD−ROMドライブ装置、DVDドライブ装置などの読取装置32と、オペレーティングシステムを常駐させた作業用メモリ(RAM)33と、記録媒体31に記憶されたプログラムを記憶するメモリ34と、ディスプレイといった表示装置35と、入力装置であるマウス36及びキーボード37と、データなどの送受を行うための通信装置38と、プログラムの実行を制御するCPU39とを備えている。コンピュータ30は、記録媒体31が読取装置32に挿入されると、読取装置32から記録媒体31に格納された動作再現プログラムにアクセス可能になり、当該動作再現によって、本実施形態に係る動作再現システムとして動作することが可能になる。
【0049】
図12に示すように、動作再現プログラムは、搬送波に重畳されたコンピュータデータ信号40としてネットワークを介して提供されるものであってもよい。この場合、コンピュータ30は、通信装置38によって受信した動作再現プログラムをメモリ34に格納し、当該動作再現プログラムを実行することができる。
【0050】
本発明は、上記実施形態に限定されるものではない。例えば、上記実施形態では、シミュレータ20によって搬送システム100の動作を再現しているが、搬送システム100の実機によって動作を再現させてもよい。
【0051】
また、上記実施形態では、動作再現システム1において状況ログ読込部10と動作ログ読込部12とに機能を分けて状況ログ及び動作ログをそれぞれ読み込んでいるが、状況ログ読込部10又は動作ログ読込部12のいずれか一方において状況ログ及び動作ログの両方を読み込んで保持してもよい。要は、搬送システム100から出力された状況ログ及び動作ログを読み込む機能を有していればよい。
【0052】
また、上記実施形態では、搬送システム100がストッカ130及びコンベア150を備えている構成を例示したが、搬送システム100は、その他に天井走行式無人搬送車(ビークル)、無人搬送車などを備えていてもよい。この場合、シミュレータ20も搬送システム100の構成に応じた構成とすればよい。
【0053】
また、搬送システム100から出力される動作ログ及び状況ログには、上述の情報が記録されたログだけでなく、搬送システム100の動作に係るその他の情報を示すログが含まれていてもよい。
【符号の説明】
【0054】
1…動作再現システム、10…状況ログ読込部、11…状況情報取得部、12…動作ログ読込部、13…動作情報取得部、14…動作再現部、100…搬送システム、110…MCS(搬送指示装置)、120…ストッカコントローラ(保管制御装置)、130…ストッカ(保管装置)、140…コンベアコントローラ(制御装置)、150…コンベア(搬送装置)、200…動作再現プログラム、201…状況ログ読込モジュール、202…状況情報取得モジュール、203…動作ログ読込モジュール、204…動作情報取得モジュール、205…動作再現モジュール、C…キャリア(被搬送物)。
【特許請求の範囲】
【請求項1】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現方法であって、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込ステップと、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込ステップと、
前記状況ログ読込ステップにおいて読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得ステップと、
前記動作ログ読込ステップにおいて読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得ステップと、
前記動作情報取得ステップにおいて取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現ステップと、
を含むことを特徴とする動作再現方法。
【請求項2】
前記搬送装置は、前記被搬送物を収納する複数の棚と、前記被搬送物の入出庫を行うポートと、前記棚と前記ポートとの間において前記被搬送物を移載する移載装置とを有する保管装置を含み、
前記制御装置は、前記保管装置を制御する保管制御装置を含み、
前記動作ログは、前記保管装置の搬送に係る搬送ログ、前記保管装置における相互通信に係る通信ログ及び前記保管装置のアラームに係るアラームログを含み、
前記状況ログは、前記棚に収納されている前記被搬送物の状態、前記ポートの入出庫状態、前記移載装置の状態、及び前記搬送指示装置からの前記搬送指令の受信状態の各々に係るログを含んでいることを特徴とする請求項1記載の動作再現方法。
【請求項3】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現システムであって、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込部と、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込部と、
前記状況ログ読込部によって読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得部と、
前記動作ログ読込部によって読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得部と、
前記動作情報取得部によって取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現部と、
を備えることを特徴とする動作再現システム。
【請求項4】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現プログラムであって、
コンピュータを、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込モジュールと、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込モジュールと、
前記状況ログ読込モジュールによって読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得モジュールと、
前記動作ログ読込モジュールによって読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得モジュールと、
前記動作情報取得モジュールによって取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現モジュールと、
として機能させることを特徴とする動作再現プログラム。
【請求項1】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現方法であって、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込ステップと、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込ステップと、
前記状況ログ読込ステップにおいて読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得ステップと、
前記動作ログ読込ステップにおいて読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得ステップと、
前記動作情報取得ステップにおいて取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現ステップと、
を含むことを特徴とする動作再現方法。
【請求項2】
前記搬送装置は、前記被搬送物を収納する複数の棚と、前記被搬送物の入出庫を行うポートと、前記棚と前記ポートとの間において前記被搬送物を移載する移載装置とを有する保管装置を含み、
前記制御装置は、前記保管装置を制御する保管制御装置を含み、
前記動作ログは、前記保管装置の搬送に係る搬送ログ、前記保管装置における相互通信に係る通信ログ及び前記保管装置のアラームに係るアラームログを含み、
前記状況ログは、前記棚に収納されている前記被搬送物の状態、前記ポートの入出庫状態、前記移載装置の状態、及び前記搬送指示装置からの前記搬送指令の受信状態の各々に係るログを含んでいることを特徴とする請求項1記載の動作再現方法。
【請求項3】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現システムであって、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込部と、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込部と、
前記状況ログ読込部によって読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得部と、
前記動作ログ読込部によって読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得部と、
前記動作情報取得部によって取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現部と、
を備えることを特徴とする動作再現システム。
【請求項4】
被搬送物を搬送する搬送装置と、前記搬送装置の動作を制御する制御装置と、前記制御装置に搬送指令を出力する搬送指示装置とを備える搬送システムの動作を再現する動作再現プログラムであって、
コンピュータを、
前記搬送システムの動作を示す情報としてイベント毎に取得された動作ログを読み込む動作ログ読込モジュールと、
前記搬送システムの状況を示す情報として所定時間毎に取得された状況ログを読み込む状況ログ読込モジュールと、
前記状況ログ読込モジュールによって読み込まれた前記状況ログの中から、前記搬送システムの動作を再現する再現時点の直前に取得された前記状況ログを抽出し、抽出した前記状況ログから、前記搬送システムの状況を示す状況情報を取得する状況情報取得モジュールと、
前記動作ログ読込モジュールによって読み込まれた前記動作ログの中から、前記再現時点の直前の前記状況ログが取得された時点から前記再現時点までに取得された前記動作ログを時系列順に抽出し、抽出した前記動作ログから、前記搬送システムの動作を示す動作情報を取得する動作情報取得モジュールと、
前記動作情報取得モジュールによって取得された前記動作情報を用いて前記状況情報を前記再現時点まで時系列順に更新することによって、前記再現時点における前記搬送システムの動作を再現する動作再現モジュールと、
として機能させることを特徴とする動作再現プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−229078(P2012−229078A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−97498(P2011−97498)
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月25日(2011.4.25)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]