
動作安定支援装置、および、動作安定支援方法

【課題】下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、動作安定支援装置および動作安定支援方法を提供することを課題とする。
【解決手段】本発明は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うことを特徴とする。
【解決手段】本発明は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動作安定支援装置、および、動作安定支援方法に関する。
【背景技術】
【0002】
従来、運動障害者や高齢者等において、歩行時ならびに起居動作時の運動機能改善や姿勢安定性向上を目的として、下肢装具、杖、手すり、歩行器等が使用されている。
【0003】
また、従来、理論的研究として、転倒は、ZMP(zero moment point)が両足底面で作られる支持基底面(BOS:base of support)から外れて補正不能に陥った場合と定義されており、例えば、非特許文献1では、足を滑らせて転倒する場合のZMPとBOSの関係が実験的に解析されている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Takeshi Yamaguchi, Shintaro Hatanaka, Hiroteru Yamanouchi, Hiroshi Onodera and Kazuo Hokkirigawa, “Experimental Analysis of Relationship between Target Zero Moment Point and Base of Support for Evaluation of the Potential of Slip−related Falls”, Proceedings of the IEA (International Ergonomics Association) 2009, (2009) CD−ROM (7 pages).
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の靴型装具等の下肢装具は、主に内反尖足等を矯正するために足首関節を直角位置に固定させることにより、患側の足裏全体を着地させて立位や歩行の安定化を目指すものであり、下肢筋力や運動機能自体が低下している場合に、安定性を確保して転倒を防止するものではなかった。
【0006】
また、従来の転倒の理論的研究は、二足歩行ロボットのZMP制御技術等に応用されているものの、運動障害者や高齢者等の利用者が使用することを目的として開発された下肢装具等はなかった。
【0007】
本発明は、上記問題点に鑑みてなされたもので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、動作安定支援装置および動作安定支援方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
このような目的を達成するため、本発明の動作安定支援装置は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0009】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、出力部に接続されており、上記制御部は、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知手段、を更に備えたことを特徴とする。
【0010】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、上記安定化機構制御手段は、上記転倒可能性判定手段により判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、を特徴とする。
【0011】
また、本発明の動作安定支援装置は、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段と、上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0012】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着される加速度センサに接続されており、上記制御部は、上記加速度センサにより検出される加速度を取得する加速度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記加速度取得手段により取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0013】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着されるジャイロセンサに接続されており、上記制御部は、上記ジャイロセンサにより検出される角速度を取得する角速度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記角速度取得手段により取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0014】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着される曲げセンサに接続されており、上記制御部は、上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記角速度取得手段により取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、を特徴とする。
【0015】
また、本発明の動作安定支援装置は、利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0016】
また、本発明は、動作安定支援方法に関するものであり、本発明の動作安定支援方法は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、上記制御部において実行される、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、上記重心位置算出ステップにて算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御ステップと、を含むことを特徴とする。
【0017】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、出力部に接続されており、上記制御部において実行される、上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知ステップ、を更に含むことを特徴とする。
【0018】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、上記安定化機構制御ステップは、上記転倒可能性判定ステップにて判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、を特徴とする。
【0019】
また、本発明の動作安定支援方法は、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、上記制御部において実行される、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、上記重心位置算出ステップにて算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、上記転倒可能性判定ステップにて上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知ステップと、上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御ステップと、を含むことを特徴とする。
【0020】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着される加速度センサに接続されており、上記制御部において実行される、上記加速度センサにより検出される加速度を取得する加速度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記加速度取得ステップにて取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0021】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着されるジャイロセンサに接続されており、上記制御部において実行される、上記ジャイロセンサにより検出される角速度を取得する角速度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記角速度取得ステップにて取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0022】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着される曲げセンサに接続されており、上記制御部において実行される、上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記角速度取得ステップにて取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、を特徴とする。
【発明の効果】
【0023】
この発明によれば、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、という効果を奏する。より具体的には、歩行時や起居動作時の必要時に靴の側方に安定支持板を展開させるので、重心位置が支持基底面から外れる場合であっても、展開された安定支持板によって支持基底面を広げて、歩行動作や起居動作を安定化させ、側方転倒を抑制することができる。
【0024】
また、本発明によれば、さらに、側方転倒の可能性が判定された場合に、出力部を介して利用者に告知する出力制御を行うので、利用者に不安定姿勢を予め告知して危険動作回避を促すと共に、安定支持板が展開して安定化機構が作動する可能性を予告することができる、という効果を奏する。
【0025】
また、本発明によれば、さらに、側方転倒の可能性がなくなったと判定した場合に、安定化機構を制御して安定支持板を収納させる制御を行うので、安定支持板の展開が不要となった際には、自動的に安定支持板を収納することができるので、椅子脚との衝突や引っ掛かり、壁面との接触を回避して、歩行動作や起居動作の妨げにならない、という効果を奏する。
【0026】
また、本発明によれば、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置に基づいて、重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、支持基底面の外側となると判定された場合に、出力部を介して利用者に側方転倒の可能性を告知する出力制御を行い、入力部を介して利用者により入力があった場合に、安定化機構を制御して安定支持板を展開または収納させる制御を行うので、利用者に不安定姿勢を予め告知して危険動作回避を促すことができると共に、利用者にて側方転倒が不可避と判断した場合には、手動にて安定支持板を展開させることができるので、歩行動作や起居動作の安定化を図り転倒を防止することができる、という効果を奏する。また、安定支持板の展開が不要となった際には、手動制御にて安定支持板を収納することができる。
【0027】
また、本発明によれば、さらに、加速度センサにより検出される加速度を取得し、取得した加速度に基づいて、予測される重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定するので、利用者の動作による加速度や重力方向に対する傾き等を検出して、より正確に側方転倒の可能性を判定することができる、という効果を奏する。例えば、歩行時や起居動作時の不安定動作により所定値を超える加速度や傾き等を検出した場合に、側方転倒の可能性を判定することができる。また、歩行時の左右の足を交互に動かす際に発生する加速度や傾き等の変化に連動させて、側方転倒の可能性ある患側の足に荷重が移動したタイミングで、安定支持板を展開させるための判定を行うことができる。
【0028】
また、本発明によれば、さらに、ジャイロセンサにより検出される角速度を取得し、取得した角速度に基づいて、予測される重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定するので、利用者の動作による角速度を検出して、より正確に側方転倒の可能性を判定することができる、という効果を奏する。例えば、歩行時や起居動作時の不安定動作により所定値を超える角速度を検出した場合に、側方転倒の可能性を判定することができる。また、歩行時の左右の足を交互に動かす際に発生する角速度の変化に連動させて、側方転倒の可能性がある患側の足に荷重が移動したタイミングで、安定支持板を展開させるための判定を行うことができる。
【0029】
また、本発明によれば、さらに、利用者に装着された曲げセンサにより検出される曲げ角度を取得し、取得した曲げ角度に基づいて、利用者の起居動作時の側方転倒の可能性を判定するので、例えば四肢等の関節において一定の曲げ角度を検出した場合に、側方転倒の可能性を判定することができる。例えば、歩行時や起居動作時における膝関節や股関節、肘関節、手首関節、指関節等の動きに連動させて、側方転倒の可能性ある患側の足が内反尖足となった場合に、安定支持板を展開させるための判定を行うことができる。
【0030】
また、本発明によれば、利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、という効果を奏する。より具体的には、歩行時や起居動作時の必要時に靴の側方に安定支持板を展開させるので、重心位置が支持基底面から外れる場合であっても、展開された安定支持板によって支持基底面を広げて、歩行動作や起居動作を安定化させ、側方転倒を抑制することができる。
【図面の簡単な説明】
【0031】
【図1】図1は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図2】図2は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図3】図3は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図4】図4は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図5】図5は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図6】図6は、本実施の形態が適用される動作安定支援装置の構成の一例を示すブロック図である。
【図7】図7は、本実施の形態における圧力センサ110の構成の一例を示す図である。
【図8】図8は、本実施の形態における収納時の安定化機構170の構成の一例を示す図である。
【図9】図9は、本実施の形態における展開時の安定化機構170の構成の一例を示す図である。
【図10】図10は、本実施の形態における動作安定支援装置100の自動制御処理の一例を示すフローチャートである。
【図11】図11は、本実施の形態における動作安定支援装置100の手動制御処理の一例を示すフローチャートである。
【図12】図12は、本実施例のインテリジェント靴を実現する動作安定支援装置の装着例を示す図である。
【図13】図13は、本実施例の安定化機構170が設けられた靴の上面図を示す図である。
【図14】図14は、本実施例の安定化機構170が設けられた靴の上面図を示す図である。
【図15】図15は、本実施例の安定化機構170が設けられた靴の下面図を示す図である。
【図16】図16は、本実施例の安定化機構170が設けられた靴の下面図を示す図である。
【図17】図17は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。
【図18】図18は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。
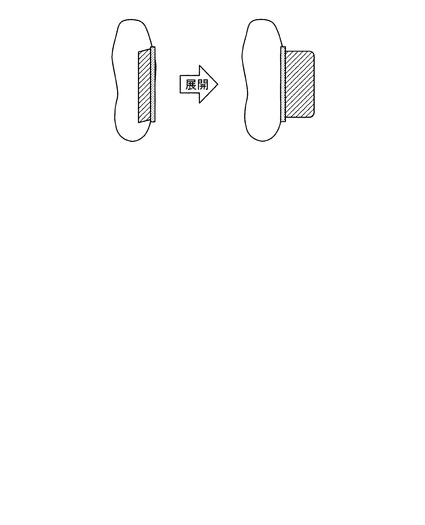
【図19】図19は、側方張り出しタイプの安定化機構を示す図である。
【図20】図20は、独立回転タイプの安定化機構を示す図である。
【図21】図21は、フラップ型の安定化機構を示す図である。
【発明を実施するための形態】
【0032】
以下に、本発明にかかる、動作安定支援装置、および、動作安定支援方法の実施の形態を図面に基づいて詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。例えば、以下の実施の形態においては、靴等の下肢装具を足に装着して実施するため、足と地面とは靴底を介して接地しているものとして説明することがあるが、本発明はこれに限られず、少なくとも圧力センサを介して接地している部分があればよく、下肢装具は、圧力センサや安定化機構を装着するためのものであれば必ずしも靴の形態に限られない。
【0033】
[本発明の実施の形態の概要]
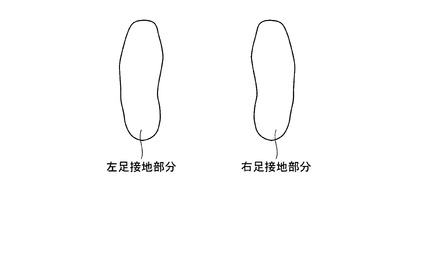
以下、本発明の実施の形態の概要について、まず図1〜図5を参照して基本原理を説明し、その後、本実施の形態の構成および処理等について詳細に説明する。図1〜図5は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【0034】
歩行時や起居動作時等のように、人物が左右2本の足(靴底)を地面に接地している場合、図1に示すような領域が左右の足(靴底)の接地部分となる。ここで、歩行時や起居動作時等の安定性の定量的評価において、支持基底面(BOS(base of support),以下、単に「BOS」と呼ぶ場合がある。)という概念が重要である。
【0035】
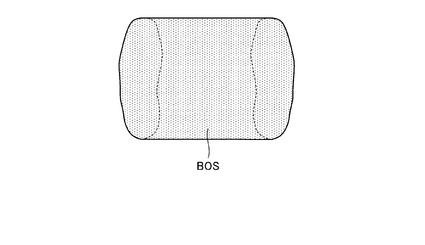
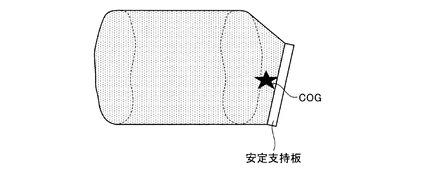
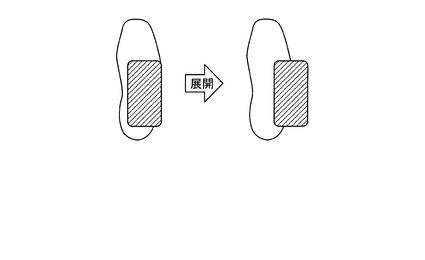
支持基底面(BOS)とは、両足立ちの場合、地面で着地している両足で囲まれた投影面積(図2の網掛け部分)であり、片足立ち立ちの場合、地面に接地した足(靴)による投影面積(片足の靴底の面積)と定義される。
【0036】
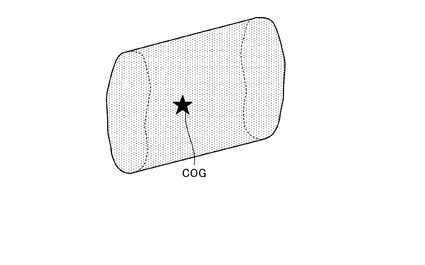
ここで、身体重心位置(COG(center of gravity),以下、単に「COG」と呼ぶ場合がある。)は、身体重心を地面(床面)に投影した点である。図3に示すように、身体重心位置(COG)が支持基底面(BOS)の内部にあれば、歩行や起居動作や方向転換等の動作は、安定性があり安全である。
【0037】
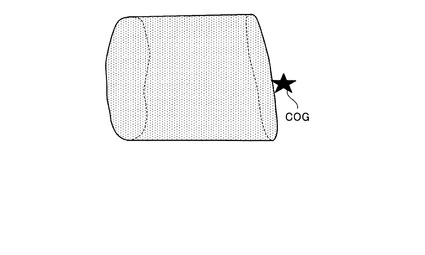
しかし、身体重心位置(COG)が支持基底面(BOS)の外に出れば安定性は損なわれ、速やかにCOGをBOSの内側に戻せなければ転倒に至る。高齢者や脳脊髄障害患者においては、体の傾きの補正能力が低下しているため、躓きや方向転換や立ち座り等の動作時に、COGがBOSの外に出てしまった場合、転倒の危険が急激に大きくなる。特に、歩行時の片足接地時には、BOSが靴底のみの狭い面積となる不安定な時間が存在する。
【0038】
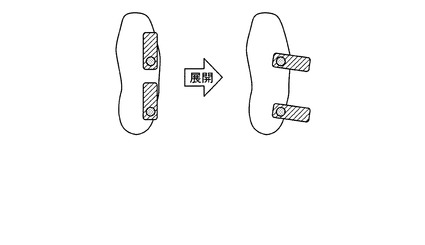
さらに、片麻痺患者等のように内反尖足である場合には、図4に示すように、麻痺足(患側の足)の靴底全面で接地できず、靴底の外側でのみ接地する不安定な歩行となる。そして、重心移動の際、COGはBOSの障害側の側方に外れ易くなる結果、容易に障害側にバランスを崩し、患側下肢で踏みとどまれず補正不能となり側方転倒に至る。
【0039】
そのため、本実施の形態においては、側方転倒の可能性がある場合に、図5に示すように安定支持板を展開させて、身体重心位置(COG)が内側となるよう支持基底面(BOS)を拡大させることにより、歩行時や起居動作時の不安定性を改善することを目的とする。
【0040】
本実施の形態は、概略的に、以下の基本的特徴を有する。すなわち、本実施の形態の動作安定支援装置は、少なくとも制御部を備え、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続される。
【0041】
そして、本実施の形態の動作安定支援装置は、圧力センサにより検出された圧力に基づいて、重心位置を算出する。
【0042】
そして、本実施の形態の動作安定支援装置は、算出した重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定する。
【0043】
そして、本実施の形態の動作安定支援装置は、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行う。なお、側方転倒の可能性が判定された場合に自動的に安定支持板を展開させるのではなく、側方転倒の可能性が判定された場合に、出力部を介して利用者に側方転倒の可能性を告知し、利用者から入力部を介して入力があった場合に(すなわち、手動制御により)安定支持板を展開させてもよい。
【0044】
以上が本実施の形態の概要である。これにより、安定支持板の展開によって支持基底面(BOS)が麻痺側などの不安定側に大きく広がるため、安定性が確保され、起居動作や歩容が改善し、転倒防止効果が得られる。また、安定支持板は、内反による患側内側の浮き上がりを抑制する作用も有するので、これによる歩容安定効果も得られる。その結果、特に高齢者や脳脊髄障害患者(例えば片麻痺患者)等の利用者において、起居動作や歩容の改善によるADL(Activities of Daily Living)の向上を図ることができる。また、転倒を防止し、特に側方転倒の抑制による大腿骨骨折を予防することができる。
【0045】
[動作安定支援装置の構成]
次に、動作安定支援装置の構成について図6〜図9を参照して説明する。図6は、本実施の形態が適用される動作安定支援装置の構成の一例を示すブロック図であり、該構成のうち本実施の形態に関係する部分のみを概念的に示している。
【0046】
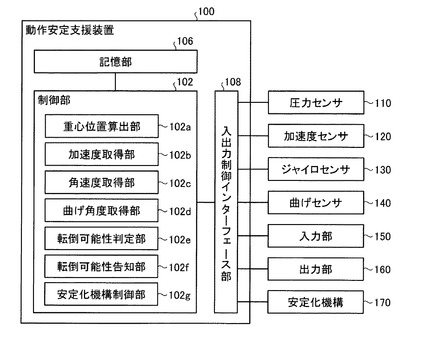
図6に示すように、本実施の形態の動作安定支援装置100は、概略的に、制御部102と入出力制御インターフェース108と記憶部106を備える。ここで、制御部102は、動作安定支援装置100の全体を統括的に制御するCPU等である。また、入出力制御インターフェース108は、各種センサ110〜140および入力部150や出力部160や安定化機構170に接続されるインターフェースである。また、記憶部106は、各種のデータベースやテーブルなどを格納する装置である。これら動作安定支援装置100の各部は任意の通信路を介して通信可能に接続されている。動作安定支援装置100の各部の通信は、有線によるものに限らず、無線通信であってもよく、例えば光通信方法を適用してもよい。
【0047】
ここで、動作安定支援装置100は、既知のマイクロコンピュータや、パーソナルコンピュータ、ワークステーション等の情報処理装置として構成してもよく、また、該情報処理装置に任意の周辺装置を接続して構成してもよい。パーソナルコンピュータに比べ重量や消費電力等の観点から実用的であるので、好適には、マイクロコンピュータとして構成する。マイクロコンピュータとして構成する場合、市販のワンチップマイコン(one−chip microcomputer)を用いることができる。例えば、microchip社製や、Atmel社製、Texas Instruments社製、ルネサス社製、NEC社製、hitachi社製等の8ビットから32ビット組み込み用マイコン等を用いてもよい。動作安定支援装置100をマイコンとして構成した場合、マイコンを含めた電子回路は名刺サイズに収めることができるので、利用者のベルト等に装着することができ、好適である。なお、電源は、例えば、乾電池、リチウム電池、ニッケル水素充電池等を用いることができる。
【0048】
図6において、記憶部106は、固定ディスク装置等のストレージ手段であり、例えば、記憶部106は、各種処理に用いる各種のプログラムや、テーブル、ファイル、データベース等を格納する。
【0049】
また、図6において、入出力制御インターフェース部108は、各種センサ110〜140や、入力部150、出力部160、および安定化機構170の制御を行う。ここで、入出力制御インターフェース部108は、これら各部110〜170と、制御部102との間における有線または無線での通信制御を行う機能を有してもよい。例えば、入出力制御インターフェース部108は、各種センサ110〜140にて検出された検出信号または検出データや、入力部150を介して入力された入力データを、制御部102に伝達する機能を有し、また、制御部102から出力部160への出力データや、制御部102から安定化機構170への制御データを伝達する機能を有する。
【0050】
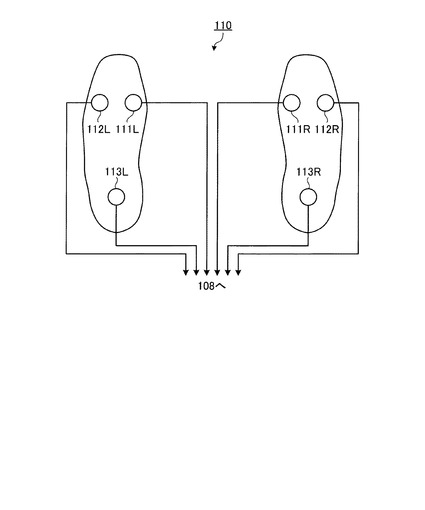
また、図6において、圧力センサ110は、靴底の接地面の圧力を検出する圧力検出手段である。例えば、圧力センサ110は、圧電素子等により接地面の圧力を電気信号に変換する圧電センサ等である。また、圧力センサ110は、足の裏にかかる圧力(荷重)を感知するため、靴底(例えば、足裏が接触する中敷き等の部分や、中敷きと靴本体との間や、地面と接触する靴裏部分等)に設けられる。一例として圧力センサ110は、足の前内側(親指の付け根付近)、前外側(小指の付け根付近)、および、踵の3箇所の位置に設置される。ここで、図7は、本実施の形態における圧力センサ110の構成の一例を示す図である。
【0051】
図7に示すように、本実施の形態における圧力センサ110は、一例として、右足の前内側圧センサ111R、前外側圧センサ112R、踵圧センサ113Rと、左足の前内側圧センサ111L、前外側圧センサ112L、踵圧センサ113Lからなり、両足の各圧力センサ111L,R〜113L,Rにより検出された信号は、制御部102に入力される。なお、本実施の形態の圧力センサ110の構成は、これに限られず、利用者が片麻痺患者等のように患側の片方の足のみが内反尖足等により側方転倒の虞がある場合は、当該患側の足の靴底のみに圧力センサを設置してもよい。
【0052】
再び図6に戻り、加速度センサ120は、加速度を検出する加速度検出手段である。ここで、加速度センサ120は、利用者の歩行時や起居動作時の加速度が検出できるように、利用者(例えば、利用者の重心付近や四肢)に装着される。また、加速度センサ120は、加速度の検出軸数が3軸である、3軸加速度センサであってもよく、地球の重力加速度を検出することにより利用者の傾きを検出できるよう構成してもよい。
【0053】
また、図6において、ジャイロセンサ130は、角速度や角度の変化を検出する角速度検出手段である。ここで、ジャイロセンサ130は、利用者の歩行時や起居動作時の角速度が検出できるように、利用者(例えば、利用者の重心付近や四肢や靴)に装着される。また、ジャイロセンサ130は、角速度の検出軸数が2軸である、2軸ジャイロセンサであってもよく、利用者の重心付近の角速度を検出することにより利用者の身体重心を中心とした回転モーメント(トルク)を検出できるよう構成してもよい。
【0054】
また、図6において、曲げセンサ140は、曲げ角度を検出する曲げ角度検出手段である。ここで、曲げセンサ140は、利用者の歩行時や起居動作時における関節(膝関節や股関節、肘関節、手首関節、指関節等)の曲げ角度が検出できるように利用者(例えば、健常側または患側の四肢)に装着される。例えば、曲げセンサ140は、曲がる角度により抵抗値が変化する曲げ歪み検出センサであってもよい。
【0055】
なお、以上の各種センサ110〜140からの制御部102への入力は、アナログ入力であってもよく、デジタル入力であってもよい。
【0056】
また、図6において、入力部150は、利用者により入力される各種入力データや入力情報等を取得する入力手段である。例えば、入力部150としては、スイッチや、キーボード、マイク等を用いることができる。なお、一例として、スイッチ等の入力部150は、腕時計型として手首に装着できるよう構成してもよく、杖やベルト等に設けてもよい。なお、入力部150として、上述した指関節等に設けられる曲げセンサ等を用いることも可能である。
【0057】
また、図6において、出力部160は、各種出力データや出力情報等を出力する出力手段である。例えば、出力部160としては、LED(Light Emitting Diode)等の発光装置や、液晶画面等のモニタや、スピーカ等を用いることができる。なお、一例として、LEDやスピーカ等の出力部160は、靴の上面に設けてもよく、腕時計型として手首に装着できるよう構成してもよく、また、ベルト等に設けてもよい。
【0058】
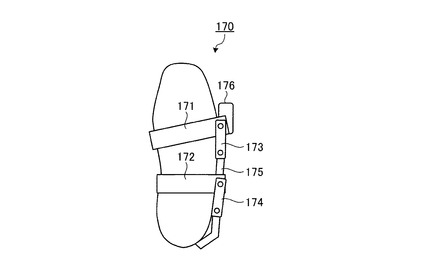
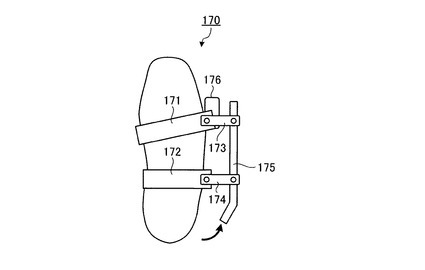
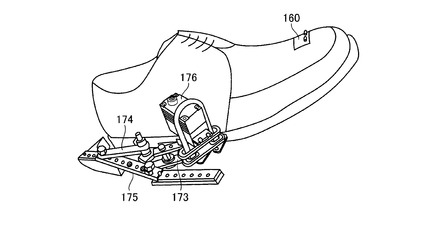
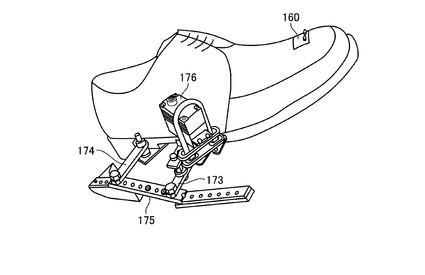
また、図6において、安定化機構170は、少なくとも一方の足(靴)の側方(例えば、患側の足の外側方向や側後方)に安定支持板を展開可能な安定化機構である。ここで、安定化機構170は、展開させた安定支持板を元の位置付近に収納可能に構成されてもよい。図8および図9は、本実施の形態における安定化機構170の構成の一例を示す図である。なお、図8は、収納時の安定化機構170を示し、図9は、展開時の安定化機構170を示している。
【0059】
図8および図9に示すように、安定化機構170は、靴底に固定される2枚の靴底固定板171,172と、2枚の靴底固定板171,172にそれぞれリンクピンを介して回動可能に設けられる2枚のリンク部材173,174と、2枚のリンク部材173,174にリンクピンを介して回動可能に設けられる安定支持板175からなるリンク機構を有し、リンク機構を駆動するためのモータ176を備える。
【0060】
本実施の形態において、2枚のリンク部材173,174は同じ長さであり、平行リンク(parallelogram linkage)となっている。そのため、安定支持板175は、図9の矢印で示すように、収納時から展開時にかけて傾くことなく側方に突出する。ここで、靴底固定板171,172は、地面と接触する靴裏部分に固定することも可能であるが、靴裏の接地面の平面化や、滑りを抑制する観点等から、中敷きと靴本体との間等の靴本体側に固定してもよい。
【0061】
なお、利用者が装着する靴等の下肢装具は、任意のものでよく、例えば、市販の靴を用いることができる。好適には、地面との滑りを抑制するために、靴底素材は、ゴムや、合成ゴム、シリコンゴム等の所定以上の摩擦係数を得られる素材が望ましい。
【0062】
また、モータ176は、リンク機構を駆動させる手段であり、一例として図8および図9に示すように、靴底固定板171とリンク部材173の間のリンクピンを介した回転角を制御可能に設けられる。すなわち、モータ176が回転角度を広げる方向に駆動することにより安定支持板175が展開時の位置に移動し(図9)、反対に、モータ176が回転角度を狭める方向に駆動することにより安定支持板175が収納時の位置に移動する(図8)。ここで、モータ176としては、サーボモータや、ステッピングモータや、ブラシレスモータ等を用いてもよい。
【0063】
再び図6に戻り、制御部102は、OS(Operating System)等の制御プログラムや、各種の処理手順等を規定したプログラム、および、所要データを格納するための内部メモリを有する。そして、制御部102は、これらのプログラム等により、種々の処理を実行するための情報処理を行う。ここで、制御部102は、機能概念的に、重心位置算出部102a、加速度取得部102b、角速度取得部102c、曲げ角度取得部102d、転倒可能性判定部102e、転倒可能性告知部102f、および、安定化機構制御部102gを備える。
【0064】
このうち、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出する重心位置算出手段である。例えば、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出してもよい。また、重心位置算出部102aは、身体重心を地面に投影した点である身体重心位置(COG)を重心位置として算出してもよく、ZMPを重心位置として算出してもよい。なお、重心位置算出部102aは、現在の重心位置を算出することに限られず、次の足の接地位置を予測した重心位置(例えば、目標ZMP等)を算出してもよく、重心位置を算出するために、圧力センサ110により検出される圧力値データの他、各種センサ120〜140にて検出されるデータや、予め入力され記憶部106に記憶された利用者の体重や身長や歩幅、身体重心位置の高さ等のデータを用いてもよい。
【0065】
ここで、本実施の形態では、非特許文献1と同様に、利用者の前後方向をy方向として、利用者の左右方向をx方向として、利用者の上下方向をz方向として説明する。一例として、重心位置算出部102aは、接地面(z=0のxy座標面)における圧力の荷重分布等の重心位置を算出する。より具体的には、重心位置算出部102aは、靴底の各圧力センサ111L,R〜113L,Rにより検出された圧力値、および、予め記憶部106に記憶された各圧力センサ111L,R〜113L,Rのxy座標に基づいて、利用者の靴底接地面の圧力(荷重)分布を算出し、または、更にこの圧力(荷重)分布に基づいて足定圧中心(center of pressure(COP))における荷重を算出する。なお、本実施の形態は、xy座標の重心位置を算出することに限られず、重心位置算出部102aにより算出された重心位置に基づいて転倒可能性判定部102eにより側方の(すなわちx方向の)転倒の可能性が判定されることから、y方向の重心位置の計算を行わずに、x座標のみの重心位置の計算を行ってもよい。
【0066】
また、重心位置算出部102aは、算出した圧力(荷重)分布から足定圧中心(COP)の荷重を算出し、更に、加速度センサ120により検出された身体重心の加速度や、ジャイロセンサ130により検出された身体重心回りの角速度あるいは角加速度や、記憶部106に記憶された利用者の身体重心位置の高さ等のデータ等を用いて、非特許文献1等に記載の公知の計算手法により、現在の又は予測される身体重心位置(COG)やZMPを算出してもよい。
【0067】
また、加速度取得部102bは、加速度センサ120により検出される加速度を取得する加速度取得手段である。例えば、加速度センサ120が3軸加速度センサである場合、加速度取得部102bは、加速度センサ120から伝達されるアナログ入力信号当に基づいて、3軸(例えば、x,y,z方向)の加速度を取得する。
【0068】
また、角速度取得部102cは、ジャイロセンサ130により検出される角速度を取得する角速度取得手段である。例えば、ジャイロセンサ130が2軸ジャイロセンサである場合、角速度取得部102cは、ジャイロセンサ130から伝達されるアナログ入力信号等に基づいて、2軸の角速度を取得する。
【0069】
また、曲げ角度取得部102dは、曲げセンサ140により検出される曲げ角度を取得する曲げ角度取得手段である。例えば、曲げセンサ140が曲がる角度により抵抗値が変化する曲げ歪み検出センサである場合、曲げ角度取得部102dは、曲げセンサ140から伝達されるアナログ入力信号(抵抗値により変動する電流値等)に基づいて、曲げ角度を取得する。
【0070】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段である。図2を参照して上述したように、支持基底面(BOS)の側方の境界は、靴底の接地面の境界と一致する。そのため、転倒可能性判定部102eは、一例として、重心位置算出部102aにより算出された接地面(xy平面)における重心位置の座標が、予め記憶部106に記憶された靴底領域に基づく支持基底面(BOS)の側方の境界ラインより外側となるか否かを判定することにより、側方転倒の可能性を判定する。なお、転倒可能性判定部102eは、現在の重心位置が支持基底面(BOS)の外側であるか否かを判定することに限らず、現在の重心位置が支持基底面(BOS)の内側であるものの、許容範囲を超えて外側に近づいたか否かを判定することにより、将来の重心位置が支持基底面(BOS)の外側となるか否かを判定してもよい。
【0071】
例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、側方転倒の可能性ありと判定してもよい。すなわち、側方転倒の例として、歩行中にバランスを崩した場合、バランスを崩した方向の足の外側に大きい荷重がかかる。例えば、右側によろけた場合、総じて左足より右足の荷重分布が高くなり、しかも、右足の小指の付け根付近に設けられた前外側圧センサ112Rからの圧力値が大幅に増加する。したがって、このような圧力分布(荷重分布)が重心位置算出部102aにより算出された場合、重心位置が支持基底面(BOS)の範囲の境界付近となるので、転倒可能性判定部102eは、右外側方向によろけて転倒し始めたと側方転倒の可能性を判定することができる。また、単にバランスを崩した場合に限らず、足の状態が内反となっている場合も、通常とは異なる圧力分布(荷重分布)が検出されるので、上記と同様に、転倒可能性判定部102eは、内反による側方転倒の可能性を判定することができる。
【0072】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された現在のZMPやZMPの軌跡が許容範囲を超えてBOS外側に近づいたか否かを判定することにより、将来のZMPが支持基底面(BOS)の外側となるか否かを判定してもよく、重心位置算出部102aにより算出された目標ZMP(次の足接地位置を予測した重心位置)が支持基底面(BOS)の外側であるか否かを判定してもよい。また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置の座標が、支持基底面(BOS)の境界を規定するx座標値よりも側方となるか否かを判定することにより、側方転倒の可能性を判定してもよい。なお、上述した許容範囲は、利用者の下肢筋力や運動機能等に応じて任意の値を設定することができる。
【0073】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置に加えて、更に、加速度取得部102bにより取得された加速度や、角速度取得部102cにより取得された角速度や、曲げ角度取得部102dにより取得された曲げ角度等に基づいて、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、加速度や角速度や曲げ角度等が基準値以上または基準値未満となったタイミングで、転倒可能性を判定することにより、利用者の歩行動作や起居動作等に連動して、安定支持板175が展開または収納されるよう判定を行うことができる。より具体的には、転倒可能性判定部102eは、歩行時の左右の足を交互に動かす際に発生する、加速度または重力加速度に基づく利用者の傾き等の変化や角速度の変化や関節の曲げ角度の変化等に連動させて、側方転倒の可能性ある患側の足に荷重が移動したタイミングで、転倒可能性判定部102eが安定支持板を展開させるための判定を行うことができる。また、これに限らず、起居動作時に発生する、加速度または重力加速度に基づく利用者の傾き等の変化や角速度の変化や関節の曲げ角度の変化等に連動させて、利用者が立ち上がろうとするタイミングや座り込もうとするタイミングで、転倒可能性判定部102eが安定支持板を展開させるための判定を行うことができる。
【0074】
また、転倒可能性告知部102fは、転倒可能性判定部102eにより支持基底面の外側となると判定された場合、すなわち側方転倒の可能性があると判定された場合に、出力部160を介して利用者に側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段である。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0075】
また、安定化機構制御部102gは、安定化機構170を制御して安定支持板175を展開または収納させる制御を行う安定化機構制御手段である。例えば、安定化機構制御部102gは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合には、安定化機構170のモータ176を制御して安定支持板175を展開させ、正常歩行時等のように転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行う。また、安定化機構制御部102gは、スイッチや曲げセンサ等の入力部150を介した入力と連動させて、安定支持板175を展開または収納させる安定化機構170の制御を行ってもよい。なお、安定化機構制御部102gが、前者の転倒可能性判定部102eの判定結果に基づく自動制御を行うか、後者の入力部150を介した入力に基づく手動制御を行うかは、制御モード切替スイッチ等の入力部150からの入力に応じて切り替え可能に構成してもよい。
【0076】
以上が、本実施の形態における動作安定支援装置100の構成の一例である。
【0077】
[動作安定支援装置100の処理]
次に、このように構成された本実施の形態における動作安定支援装置100の処理の一例について、以下に図10および図11を参照して詳細に説明する。
【0078】
[自動制御処理]
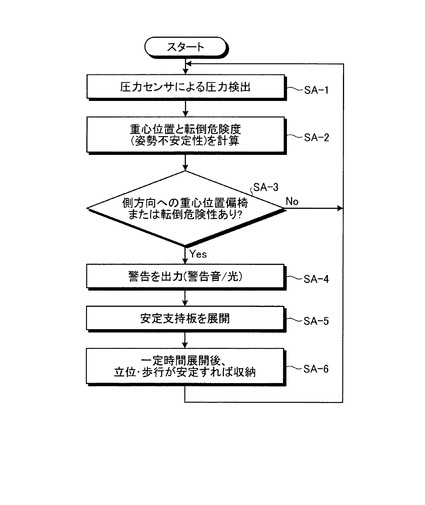
まず、動作安定支援装置100が転倒可能性の判定結果に基づいて自動的に安定化機構170を制御する自動制御処理の一例について図10を参照して説明する。ここで、図10は、本実施の形態における動作安定支援装置100の自動制御処理の一例を示すフローチャートである。
【0079】
まず、重心位置算出部102aは、圧力センサ110により検出された圧力を取得する(ステップSA−1)。例えば、重心位置算出部102aは、両足の前内側圧センサ111、前外側圧センサ112、踵圧センサ113から検出される各圧力値を取得する。ここで、利用者が片麻痺患者等のように患側の側方のみに転倒の可能性があることが予め分かっている場合は、患側の足側の圧力センサ110の圧力値を取得してもよい。
【0080】
そして、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出し、更に、転倒可能性判定部102eは、当該重心位置に基づいて転倒危険度(側方転倒の可能性(姿勢不安定性)を数値化したもの)を計算する(ステップSA−2)。例えば、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出する。また、重心位置算出部102aは、足定圧中心(COP)や身体重心位置(COG)やZMP等を重心位置として算出してもよい。その際、重心位置算出部102aは、非特許文献1等に記載の公知の計算手法により必要に応じて、加速度センサ120により検出された身体重心の加速度や、ジャイロセンサ130により検出された身体重心回りの角速度あるいは角加速度や、記憶部106に記憶された利用者の身体重心位置の高さ等のデータ等を用いて、重心位置の計算を行ってもよい。
【0081】
そして、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が、側方向への重心位置偏倚を呈しているか、支持基底面(BOS)の外側となるか等を判定することにより、側方転倒の可能性(転倒危険性)を判定する(ステップSA−3)。例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、内反尖足やバランスを崩した状態として側方転倒の可能性があると判定してもよい。また、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。その際、転倒可能性判定部102eは、現在の重心位置が支持基底面(BOS)の外側であるか否かを判定することに限らず、現在の重心位置が支持基底面(BOS)の内側であるものの、許容範囲を超えて外側に近づいたか否かを判定することにより、将来の重心位置が支持基底面(BOS)の外側となるか否かを判定してもよい。
【0082】
なお、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置に加えて、更に、加速度取得部102bにより取得された加速度や、角速度取得部102cにより取得された角速度や、曲げ角度取得部102dにより取得された曲げ角度等に基づいて、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、加速度や角速度や曲げ角度等が基準値以上または基準値未満となったタイミングで、転倒可能性を判定することにより、利用者の歩行動作や起居動作等に連動して、安定支持板175が展開または収納されるよう判定を行うことができる。
【0083】
そして、転倒可能性判定部102eにより側方転倒の可能性がないと判定された場合(ステップSA−3,No)、動作安定支援装置100は、ステップSA−1に処理を戻し、上述したステップSA−1〜SA−3の処理を繰り返す。
【0084】
一方、転倒可能性判定部102eにより側方転倒の可能性ありと判定された場合(ステップSA−3,Yes)、転倒可能性告知部102fは、出力部160を介して利用者に側方転倒の可能性(転倒危険性)を、警告音や光等により警告する出力制御を行う(ステップSB−4)。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0085】
そして、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を展開させる制御を行う(ステップSA−5)。
【0086】
そして、安定化機構制御部102gは、一定時間展開後、立位・歩行が安定すれば、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行う(ステップSA−6)。例えば、安定化機構制御部102gは、転倒可能性判定部102eにより側方転倒の可能性(転倒危険性)がなくなったと判定された場合に、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行ってもよい。
【0087】
そして、動作安定支援装置100は、上述したステップSA−1〜SA−6の処理を繰り返し行う。
【0088】
以上が、本実施の形態における動作安定支援装置100の自動制御処理の一例である。
【0089】
[手動制御処理]
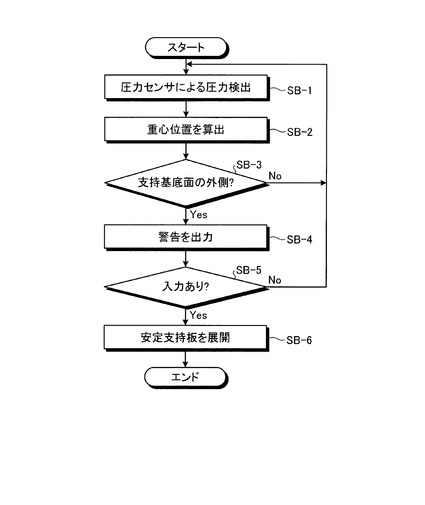
次に、動作安定支援装置100が転倒可能性の判定結果を出力し、利用者による入力に応じて安定化機構170を制御する手動制御処理の一例について図11を参照して説明する。ここで、図11は、本実施の形態における動作安定支援装置100の手動制御処理の一例を示すフローチャートである。
【0090】
まず、重心位置算出部102aは、圧力センサ110により検出された圧力を取得する(ステップSB−1)。上述のように、例えば、重心位置算出部102aは、両足の前内側圧センサ111、前外側圧センサ112、踵圧センサ113から検出される各圧力値を取得する。
【0091】
そして、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出する(ステップSB−2)。例えば、上述のように、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出してもよく、足定圧中心(COP)や身体重心位置(COG)やZMP等を重心位置として算出してもよい。
【0092】
そして、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定する(ステップSB−3)。例えば、上述のように、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、内反尖足やバランスを崩した状態として側方転倒の可能性があると判定してもよい。また、上述のように、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。
【0093】
そして、転倒可能性判定部102eにより側方転倒の可能性がないと判定された場合(ステップSB−3,No)、動作安定支援装置100は、ステップSB−1に処理を戻し、上述したステップSB−1〜SB−3の処理を繰り返す。
【0094】
一方、転倒可能性判定部102eにより側方転倒の可能性ありと判定された場合(ステップSB−3,Yes)、転倒可能性告知部102fは、出力部160を介して利用者に側方転倒の可能性を警告する出力制御を行う(ステップSB−4)。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0095】
そして、安定化機構制御部102gは、スイッチや曲げセンサ等の入力部150を介して利用者から展開指示の入力があるか否かを判定する(ステップSB−5)。
【0096】
入力部150を介した展開指示の入力がない場合(ステップSB−5,No)、動作安定支援装置100は、ステップSB−1に処理を戻し、上述したステップSB−1〜SB−5の処理を繰り返す。
【0097】
一方、入力部150を介して利用者より展開指示の入力があった場合(ステップSB−5,Yes)、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を展開させる制御を行う(ステップSB−6)。
【0098】
以上が、本実施の形態における動作安定支援装置100の手動制御処理の一例である。なお、動作安定支援装置100は、上述したステップSB−1〜SB−6の処理を繰り返し行ってもよく、その際、利用者から入力部150を介した収納指示の入力が合った場合や、ステップSB−3にて転倒可能性判定部102eにより側方転倒の可能性がなくなったと判定された場合に、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行ってもよい。また、動作安定支援装置100は、上述したステップSB−1〜SB−4までの処理を行わない構成としてもよく、その場合、曲げセンサ等の入力部150からの入力に応じて関節の曲げ角度の変化等に連動させて、安定支持板175を展開または収納させる制御を行ってもよい。
【0099】
[実施例]
つづいて、上述した実施の形態における実施例について、図12〜図18を参照して説明する。ここで、まず、本実施例の動作安定支援装置が開発された背景について説明する。
【0100】
運動障害者や高齢者において、安定した歩行の維持は日常生活において不可欠である。しかし、高齢者では筋力と運動能力の低下により、また、脳脊髄疾患患者では麻痺のため、歩行時ならびに起居動作時の安定性が損なわれている。この結果、日常生活動作(ADL)の低下と転倒危険性増大を招いている。
【0101】
そのため、従来、歩行ならびに起居動作時の運動機能改善あるいは姿勢安定性向上の方法として、下肢装具や、杖、手すり、歩行器が使用されている。
【0102】
脳脊髄疾患患者では、下肢装具を装着して歩容の改善をめざすことが多い。これらの患者における歩容異常には内反尖足が大きく関与している。内反尖足とは、足底が外側にかたむくため足裏の内側(親ゆび側)を接地できず、着地面積が減少して立位が不安定になる状態のことを指す。
【0103】
内反尖足の一因として、痙性マヒがある。脳卒中後遺症や、脳腫瘍、脊髄外傷、脊髄腫瘍などにより脳および脊髄障害を受けた後、下肢の運動障害をきたす症例は極めて多く、特に、これらの患者では、痙性マヒを示すことが多い。痙性マヒとは、上位中枢神経の障害により下位神経系への抑制が解除されて(release phenomenon)、筋肉のれん縮・痙縮をともなう四肢体幹の運動障害を示す病態である。痙性マヒのなかで、脳卒中後遺症患者数が圧倒的に多い。痙性マヒ患者においては、足は内反・尖足(つま先立ちになり、足の甲が外側に傾いた状態)となり、程度の差あるが膝は伸長位をとる。このため、痙性マヒ患者では、歩行時の安定性が大きく損なわれることになる。
【0104】
従来、脳脊髄疾患患者では、内反尖足を靴型装具を用いて矯正している。靴型装具は、バスケットシューズのような形態で、足首関節を直角位置に固定するものであり、麻痺側の足裏全体を着地させて立位・歩行の安定化をめざすものである。
【0105】
しかし、靴型装具で麻痺側の足裏を地面に接地できたとしても、すなわち足裏の外側と内側ともに接地したとしても、麻痺側下肢には筋力低下が存在するうえ、運動制御ループも障害(小脳や大脳基底核、さらには感覚神経入力の障害)されているので、患側のみでの片足立ちは依然として不安定であり、歩行時の患側下肢荷重時間、すなわち患側下肢での片足立ち期間は最小限にならざるをえない。
【0106】
この結果、患者(多くが脳卒中の片麻痺であり痙性マヒが認められる。)では、特有の不安定歩行(患側下肢の膝関節が伸展し、患側下肢全体を外側に旋回させる、いわゆる振り回し歩行)が認められることになり、日常生活において十分な歩行速度と安定性は得られない。
【0107】
一方、一般の高齢者では、内反尖足は認められないものの、下肢筋力低下と運動機能の低下が加齢と共に顕著となる。このため高齢者においても歩行・起居動作時の安定性確保と転倒防止は重要である。
【0108】
一般に、歩行時(片足接地時)には、支持基底面(BOS)が靴底のみの狭い面積となる時間が存在する。ここで、従来の杖も支持基底面(BOS)の拡大効果を有する。しかし、脳脊髄疾患患者では患側上肢にも麻痺が認められる事が多いため、脳卒中患者の場合には患側下肢の安定性向上は杖では得られないのが普通である。
【0109】
そこで、本願発明者らは、高齢者や脳脊髄疾患患者において、特に麻痺足等の片足接地時に、支持基底面(BOS)を拡大できれば、歩行・起居動作の不安定性は改善されるとの着想を得た。すなわち、転倒危険時に支持基底面(BOS)を動的に変化させるインテリジェント靴を開発すれば、起居動作と歩行安定性向上と転倒ダメージ軽減が可能となる。そのため、起居動作および歩行の際に、靴の面積を側方・側後方に広げて支持基底面(BOS)を広げ、また、転倒危険時には支持基底面(BOS)を転倒方向に瞬時に広げて転倒を抑制し、もし転倒が不可避となれば身体ダメージが最小となるよう転倒方向と加速度を制御できるインテリジェント靴を開発した。
【0110】
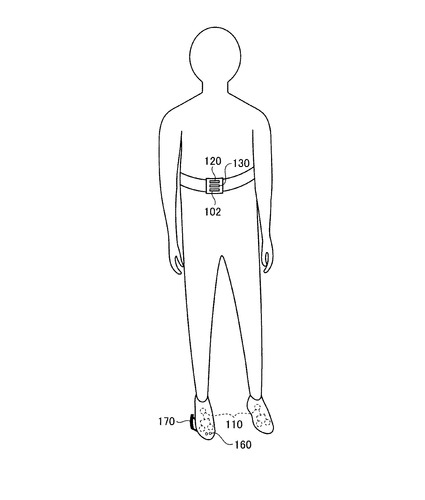
ここで、図12は、本実施例のインテリジェント靴を実現する動作安定支援装置の装着例を示す図である。なお、本実施例において、上述した実施の形態の動作安定支援装置に対応する構成には、その符号を参照して説明を行う。
【0111】
図12に示すように、利用者が装着するベルトには、制御部102を備えたマイコンが設けられており、マイコンには、ジャイロセンサ130や加速度センサ120が接続されている。また、利用者が装着する靴には、圧力センサ110と、LEDランプの出力部160と、安定化機構170が設けられている。なお、マイコンには、図示しない無線装置等の入出力制御インターフェース108が接続されており、この入出力制御インターフェース108を介して無線通信により、圧力センサ110や出力部160や安定化機構170等と信号伝達が可能となっている。なお、この無線装置を介して、携帯電話やパーソナルコンピュータ等に、各センサからの入力値や転倒可能性の判定結果等の運動機能情報を送信することも可能である。
【0112】
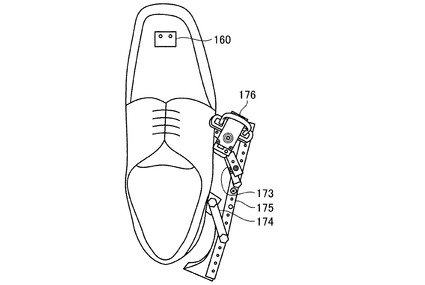
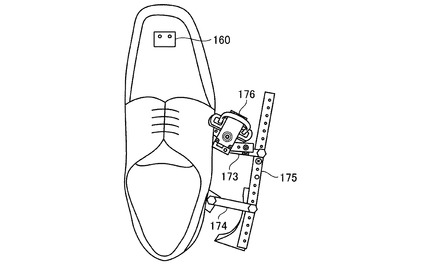
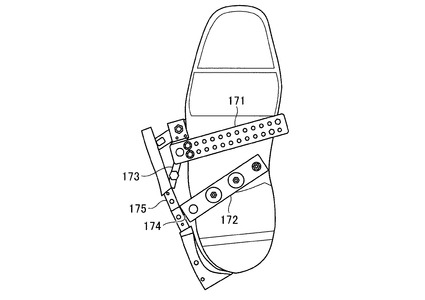
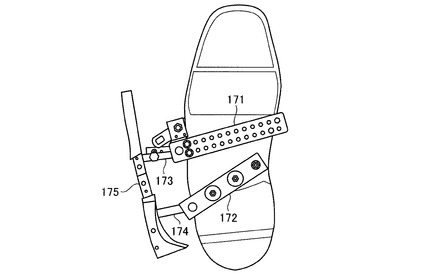
ここで、図13および図14は、本実施例の安定化機構170が設けられた靴の上面図を示す図であり、図15および図16は、本実施例の安定化機構170が設けられた靴の下面図を示す図であり、図17および図18は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。なお、図13、図15、および図17は、収納時の安定化機構170の状態を表し、図14、図16、および図18は、展開時の安定化機構170の状態を表している。なお、図示しないが、前内側圧センサ111Rと、前外側圧センサ112Rと、踵圧センサ113Rからなる圧力センサ110は、図7にて図示した配置で、中敷きと靴本体との間に設けられている。
【0113】
本実施例の安定化機構170は、靴底に固定される2枚の靴底固定板171,172と、2枚の靴底固定板171,172にそれぞれリンクピンを介して回動可能に設けられる2枚のリンク部材173,174と、2枚のリンク部材173,174にリンクピンを介して回動可能に設けられる安定支持板175からなるリンク機構を有し、リンク機構を駆動するためのサーボモータ等のモータ176を備える。
【0114】
図13に示すように、本実施例では、収納時にも側方向へ2cmほど安定支持板175が突出しており、安定化機構170をしない場合の通常の靴よりも、側方転倒予防効果を大きくしている。なお、収納時の動作安定支援効果を期待しないのであれば、靴底側に安定支持板175を配置することにより、収納時に支持基底面(BOS)を通常の靴と同一にすることも可能である。
【0115】
図14に示すように、展開時には、モータ176が、長さ5センチの平行リンクを駆動し、安定支持板175が展開して側方に突出する。これにより、体軸の側方向への過度の変異を抑制でき、万一の転倒の際にも、大腿骨骨折の危険性が大きい側方転倒のリスクを小さくすることができる。なお、リンクピンを外して他のリンク穴に再設置することにより、長さの異なるリンクに容易に変更することも可能である。実施例の安定化機構170では、利用者の体格や障害の程度に応じて、リンク長を1cm〜10cm程度の範囲で自由に調整することができる。
【0116】
また、図15および図16に示すように、靴裏部分には、靴底固定板171,172が固定されている。好適には、靴底固定板171,172は、靴のヒールの高さより地面側に突出しないように、靴底のゴムを一部くり抜いて設けられる。
【0117】
また、図15および図16に示すように、安定支持板175の裏面部には、靴の外後方まで約1cmほど靴底ゴムを回り込ませて設置している。これにより、後方にバランスを崩した際の安定性改善に寄与している。また、これ以上後方に靴底ゴムを突出させると、階段を降りる際や歩行時に引っかかる虞があり、かえって歩行が不安定となる場合があるため、この構成が好適である。
【0118】
また、図17および図18に示すように、安定支持板175の取り付け角度を調整することにより、収納時(折り畳み時)には踵側(後方)の安定支持板175の靴底ゴムは地面と接しないが、展開時には接地させる仕様とすることができる。これは、収納時の安定支持板175の引っかかりによるバランス障害や転倒危険を防ぐためであり、特に階段昇降時に好適である。
【0119】
また、靴の上面のつま先側付近には、赤色と緑色の2色のLEDランプからなる出力部160が設けられる。そして、前外側圧センサ112Rが設定値以上の圧(体重変移)を検出した場合には、赤色のLEDランプが点灯し、バランス異常が認められないときには緑色LEDランプが点灯するよう構成される。あるいは、2色のLEDランプからなる出力部160に替えて、多段LEDアレイ等の出力部160を用いて、体重変移あるいは歩行バランス異常の度合いを多段階で表示してもよい。
【0120】
以上のように構成された本実施例のインテリジェント靴を実現する動作安定支援装置100は、上述の自動制御処理と同様の処理を行い、圧センサ(内側圧センサ111,外側圧センサ112,および踵圧センサ113)から検出される圧力を比較して展開設定値を超えて大きくなり、安定支援が必要と判断した場合には(靴外側部への加重が一定以上になる場合、または内側および踵部への加重に比較して外側部への加重が一定比以上に増大した場合など)、マイコンの指令により、サーボモータ176が自動的に安定支持板175を展開させて靴底面積を外側方に広げることができる。なお、片麻痺患者などでは、通常の起立着席動作や歩行動作時にも安定支持板175を展開させたままにすることもできる。また、着席時には、椅子脚との接触や躓き等を避けるため、収納することも可能である。
【0121】
なお、本実施例のインテリジェント靴を用いて健常人に対して実験を行った結果、安定立位保持時(肩幅に平行に両足を置いた立位保持状態)の側方向の安定性の向上が観察された。すなわち、安定支持板175の収納時には、約70ニュートンの力で側方向から肩を押すとバランスを崩すのに対し、安定支持板175の展開時には、約120ニュートンになるまで側方向から肩を押してもバランスを崩さず、側方向の安定性の向上が確かめられた。
【0122】
以上で、本実施例の説明を終える。
【0123】
[他の実施の形態]
さて、これまで本発明の実施の形態について説明したが、本発明は、上述した実施の形態以外にも、特許請求の範囲に記載した技術的思想の範囲内において種々の異なる実施の形態にて実施されてよいものである。ここで、図19〜図21は、安定化機構170の他のメカニズムを示す図である。なお、斜線部分の構成は、上述の実施の形態の安定支持板に相当するものである。
【0124】
図19は、側方張り出しタイプの安定化機構を示す図である。図19に示すように、単純な機構を採用し、収納時に、安定支持板を靴底内に収納できるよう構成し、展開時には、任意の駆動手段により側方に略水平に突出するよう構成してもよい。
【0125】
図20は、独立回転タイプの安定化機構を示す図である。図20に示すように、2つの安定支持板を別々に回動可能に構成してもよい。そして、展開時および収納時には、モータ等の任意の駆動手段を用いて、2つの安定支持板を独立に回転制御することができる。
【0126】
図21は、フラップ型の安定化機構を示す図である。図21に示すように、靴本体と安定支持板とを蝶番を介して回動可能に構成してもよい。そして、収納時には、靴の外側面に接して地面に略垂直に安定支持板を配置し、展開時には、靴底面と平行になるように安定支持板を倒す駆動手段を用いてもよい。このように、安定化機構は、上述した実施の形態以外にも、技術思想の範囲内において他のメカニズムを採用してもよいものである。
【0127】
また、上述の実施の形態においては、本発明を、高齢者や障害者向けに、靴等の下肢装具に適用した例について説明したが、この場合に限られず、健常者向けに、雪面用の靴など全ての技術分野において、同様に適用することができる。
【0128】
また、上述の実施の形態においては、動作安定支援装置100がスタンドアローンの形態で処理を行う場合を一例に説明したが、動作安定支援装置100は、携帯電話等のクライアント端末からの要求に応じて処理を行い、その処理結果を当該クライアント端末に返却するようにしてもよい。
【0129】
また、実施の形態において説明した各処理のうち、自動的に行われるものとして説明した処理の全部または一部を手動的に行うこともでき、あるいは、手動的に行われるものとして説明した処理の全部または一部を公知の方法で自動的に行うこともできる。
【0130】
このほか、上記文献中や図面中で示した処理手順、制御手順、具体的名称、各処理の登録データやパラメータを含む情報、構成例については、特記する場合を除いて任意に変更することができる。
【0131】
また、動作安定支援装置100に関して、図示の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。
【0132】
例えば、動作安定支援装置100の各装置が備える処理機能、特に制御部102にて行われる各処理機能については、その全部または任意の一部を、CPU(Central Processing Unit)および当該CPUにて解釈実行されるプログラムにて実現してもよく、また、ワイヤードロジックによるハードウェアとして実現してもよい。尚、プログラムは、後述する記録媒体に記録されており、必要に応じて動作安定支援装置100に機械的に読み取られる。すなわち、ROMまたはHDなどの記憶部106などは、OS(Operating System)として協働してCPUに命令を与え、各種処理を行うためのコンピュータプログラムが記録されている。このコンピュータプログラムは、RAMにロードされることによって実行され、CPUと協働して制御部を構成する。
【0133】
また、このコンピュータプログラムは、動作安定支援装置100に対して任意のネットワークを介して接続されたアプリケーションプログラムサーバに記憶されていてもよく、必要に応じてその全部または一部をダウンロードすることも可能である。
【0134】
また、本発明に係るプログラムを、コンピュータ読み取り可能な記録媒体に格納してもよく、また、プログラム製品として構成することもできる。ここで、この「記録媒体」とは、メモリーカード、USBメモリ、SDカード、フレキシブルディスク、光磁気ディスク、ROM、EPROM、EEPROM、CD−ROM、MO、DVD、および、Blu−ray Disc等の任意の「可搬用の物理媒体」を含むものとする。
【0135】
また、「プログラム」とは、任意の言語や記述方法にて記述されたデータ処理方法であり、ソースコードやバイナリコード等の形式を問わない。なお、「プログラム」は必ずしも単一的に構成されるものに限られず、複数のモジュールやライブラリとして分散構成されるものや、OS(Operating System)に代表される別個のプログラムと協働してその機能を達成するものをも含む。なお、実施の形態に示した各装置において記録媒体を読み取るための具体的な構成、読み取り手順、あるいは、読み取り後のインストール手順等については、周知の構成や手順を用いることができる。
【0136】
また、動作安定支援装置100は、該情報処理装置に本発明の方法を実現させるソフトウェア(プログラム、データ等を含む)を実装することにより実現してもよい。
【0137】
記憶部106に格納される各種のファイルやテーブル等は、RAM、ROM等のメモリ装置、ハードディスク等の固定ディスク装置、フレキシブルディスク、および、光ディスク等のストレージ手段であり、各種処理や各種のプログラム、テーブル、データベース、ファイル等を格納する。
【0138】
更に、装置の分散・統合の具体的形態は図示するものに限られず、その全部または一部を、各種の付加等に応じて、または、機能負荷に応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。すなわち、上述した実施形態を任意に組み合わせて実施してもよく、実施形態を選択的に実施してもよい。
【産業上の利用可能性】
【0139】
以上詳述に説明したように、本発明によれば、歩行時や起居動作時の安定性を確保して転倒を防止することができる、動作安定支援装置および動作安定支援方法を提供することができので、医療やリハビリテーション分野、生物学研究や臨床検査、靴製造業、電子機器産業などの様々な分野において極めて有用である。
【符号の説明】
【0140】
100 動作安定支援装置
102 制御部
102a 重心位置算出部
102b 加速度取得部
102c 角速度取得部
102d 曲げ角度取得部
102e 転倒可能性判定部
102f 転倒可能性告知部
102g 安定化機構制御部
106 記憶部
108 入出力制御インターフェース部
110 圧力センサ
111 前内側圧センサ
112 前外側圧センサ
113 踵圧センサ
120 加速度センサ
130 ジャイロセンサ
140 曲げセンサ
150 入力部
160 出力部
170 安定化機構
171,172 靴底固定板
173,174 リンク部材
175 安定支持板
176 モータ
【技術分野】
【0001】
本発明は、動作安定支援装置、および、動作安定支援方法に関する。
【背景技術】
【0002】
従来、運動障害者や高齢者等において、歩行時ならびに起居動作時の運動機能改善や姿勢安定性向上を目的として、下肢装具、杖、手すり、歩行器等が使用されている。
【0003】
また、従来、理論的研究として、転倒は、ZMP(zero moment point)が両足底面で作られる支持基底面(BOS:base of support)から外れて補正不能に陥った場合と定義されており、例えば、非特許文献1では、足を滑らせて転倒する場合のZMPとBOSの関係が実験的に解析されている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Takeshi Yamaguchi, Shintaro Hatanaka, Hiroteru Yamanouchi, Hiroshi Onodera and Kazuo Hokkirigawa, “Experimental Analysis of Relationship between Target Zero Moment Point and Base of Support for Evaluation of the Potential of Slip−related Falls”, Proceedings of the IEA (International Ergonomics Association) 2009, (2009) CD−ROM (7 pages).
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の靴型装具等の下肢装具は、主に内反尖足等を矯正するために足首関節を直角位置に固定させることにより、患側の足裏全体を着地させて立位や歩行の安定化を目指すものであり、下肢筋力や運動機能自体が低下している場合に、安定性を確保して転倒を防止するものではなかった。
【0006】
また、従来の転倒の理論的研究は、二足歩行ロボットのZMP制御技術等に応用されているものの、運動障害者や高齢者等の利用者が使用することを目的として開発された下肢装具等はなかった。
【0007】
本発明は、上記問題点に鑑みてなされたもので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、動作安定支援装置および動作安定支援方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
このような目的を達成するため、本発明の動作安定支援装置は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0009】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、出力部に接続されており、上記制御部は、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知手段、を更に備えたことを特徴とする。
【0010】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、上記安定化機構制御手段は、上記転倒可能性判定手段により判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、を特徴とする。
【0011】
また、本発明の動作安定支援装置は、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段と、上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0012】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着される加速度センサに接続されており、上記制御部は、上記加速度センサにより検出される加速度を取得する加速度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記加速度取得手段により取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0013】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着されるジャイロセンサに接続されており、上記制御部は、上記ジャイロセンサにより検出される角速度を取得する角速度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記角速度取得手段により取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0014】
また、本発明の動作安定支援装置は、上記記載の動作安定支援装置において、更に、上記利用者に装着される曲げセンサに接続されており、上記制御部は、上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得手段、を更に備え、上記転倒可能性判定手段は、更に、上記角速度取得手段により取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、を特徴とする。
【0015】
また、本発明の動作安定支援装置は、利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置であって、上記制御部は、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、を備えたことを特徴とする。
【0016】
また、本発明は、動作安定支援方法に関するものであり、本発明の動作安定支援方法は、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、上記制御部において実行される、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、上記重心位置算出ステップにて算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御ステップと、を含むことを特徴とする。
【0017】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、出力部に接続されており、上記制御部において実行される、上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知ステップ、を更に含むことを特徴とする。
【0018】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、上記安定化機構制御ステップは、上記転倒可能性判定ステップにて判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、を特徴とする。
【0019】
また、本発明の動作安定支援方法は、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、上記制御部において実行される、上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、上記重心位置算出ステップにて算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、上記転倒可能性判定ステップにて上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知ステップと、上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御ステップと、を含むことを特徴とする。
【0020】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着される加速度センサに接続されており、上記制御部において実行される、上記加速度センサにより検出される加速度を取得する加速度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記加速度取得ステップにて取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0021】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着されるジャイロセンサに接続されており、上記制御部において実行される、上記ジャイロセンサにより検出される角速度を取得する角速度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記角速度取得ステップにて取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、を特徴とする。
【0022】
また、本発明の動作安定支援方法は、上記記載の動作安定支援方法において、更に、上記利用者に装着される曲げセンサに接続されており、上記制御部において実行される、上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得ステップ、を更に含み、上記転倒可能性判定ステップは、更に、上記角速度取得ステップにて取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、を特徴とする。
【発明の効果】
【0023】
この発明によれば、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、という効果を奏する。より具体的には、歩行時や起居動作時の必要時に靴の側方に安定支持板を展開させるので、重心位置が支持基底面から外れる場合であっても、展開された安定支持板によって支持基底面を広げて、歩行動作や起居動作を安定化させ、側方転倒を抑制することができる。
【0024】
また、本発明によれば、さらに、側方転倒の可能性が判定された場合に、出力部を介して利用者に告知する出力制御を行うので、利用者に不安定姿勢を予め告知して危険動作回避を促すと共に、安定支持板が展開して安定化機構が作動する可能性を予告することができる、という効果を奏する。
【0025】
また、本発明によれば、さらに、側方転倒の可能性がなくなったと判定した場合に、安定化機構を制御して安定支持板を収納させる制御を行うので、安定支持板の展開が不要となった際には、自動的に安定支持板を収納することができるので、椅子脚との衝突や引っ掛かり、壁面との接触を回避して、歩行動作や起居動作の妨げにならない、という効果を奏する。
【0026】
また、本発明によれば、靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置に基づいて、重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、支持基底面の外側となると判定された場合に、出力部を介して利用者に側方転倒の可能性を告知する出力制御を行い、入力部を介して利用者により入力があった場合に、安定化機構を制御して安定支持板を展開または収納させる制御を行うので、利用者に不安定姿勢を予め告知して危険動作回避を促すことができると共に、利用者にて側方転倒が不可避と判断した場合には、手動にて安定支持板を展開させることができるので、歩行動作や起居動作の安定化を図り転倒を防止することができる、という効果を奏する。また、安定支持板の展開が不要となった際には、手動制御にて安定支持板を収納することができる。
【0027】
また、本発明によれば、さらに、加速度センサにより検出される加速度を取得し、取得した加速度に基づいて、予測される重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定するので、利用者の動作による加速度や重力方向に対する傾き等を検出して、より正確に側方転倒の可能性を判定することができる、という効果を奏する。例えば、歩行時や起居動作時の不安定動作により所定値を超える加速度や傾き等を検出した場合に、側方転倒の可能性を判定することができる。また、歩行時の左右の足を交互に動かす際に発生する加速度や傾き等の変化に連動させて、側方転倒の可能性ある患側の足に荷重が移動したタイミングで、安定支持板を展開させるための判定を行うことができる。
【0028】
また、本発明によれば、さらに、ジャイロセンサにより検出される角速度を取得し、取得した角速度に基づいて、予測される重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定するので、利用者の動作による角速度を検出して、より正確に側方転倒の可能性を判定することができる、という効果を奏する。例えば、歩行時や起居動作時の不安定動作により所定値を超える角速度を検出した場合に、側方転倒の可能性を判定することができる。また、歩行時の左右の足を交互に動かす際に発生する角速度の変化に連動させて、側方転倒の可能性がある患側の足に荷重が移動したタイミングで、安定支持板を展開させるための判定を行うことができる。
【0029】
また、本発明によれば、さらに、利用者に装着された曲げセンサにより検出される曲げ角度を取得し、取得した曲げ角度に基づいて、利用者の起居動作時の側方転倒の可能性を判定するので、例えば四肢等の関節において一定の曲げ角度を検出した場合に、側方転倒の可能性を判定することができる。例えば、歩行時や起居動作時における膝関節や股関節、肘関節、手首関節、指関節等の動きに連動させて、側方転倒の可能性ある患側の足が内反尖足となった場合に、安定支持板を展開させるための判定を行うことができる。
【0030】
また、本発明によれば、利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置において、圧力センサにより検出された圧力に基づいて、重心位置を算出し、算出した重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定し、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行うので、下肢筋力や運動機能が低下している運動障害者や高齢者等の利用者を対象に、歩行時や起居動作時の安定性を確保して転倒を防止することができる、という効果を奏する。より具体的には、歩行時や起居動作時の必要時に靴の側方に安定支持板を展開させるので、重心位置が支持基底面から外れる場合であっても、展開された安定支持板によって支持基底面を広げて、歩行動作や起居動作を安定化させ、側方転倒を抑制することができる。
【図面の簡単な説明】
【0031】
【図1】図1は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図2】図2は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図3】図3は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図4】図4は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図5】図5は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【図6】図6は、本実施の形態が適用される動作安定支援装置の構成の一例を示すブロック図である。
【図7】図7は、本実施の形態における圧力センサ110の構成の一例を示す図である。
【図8】図8は、本実施の形態における収納時の安定化機構170の構成の一例を示す図である。
【図9】図9は、本実施の形態における展開時の安定化機構170の構成の一例を示す図である。
【図10】図10は、本実施の形態における動作安定支援装置100の自動制御処理の一例を示すフローチャートである。
【図11】図11は、本実施の形態における動作安定支援装置100の手動制御処理の一例を示すフローチャートである。
【図12】図12は、本実施例のインテリジェント靴を実現する動作安定支援装置の装着例を示す図である。
【図13】図13は、本実施例の安定化機構170が設けられた靴の上面図を示す図である。
【図14】図14は、本実施例の安定化機構170が設けられた靴の上面図を示す図である。
【図15】図15は、本実施例の安定化機構170が設けられた靴の下面図を示す図である。
【図16】図16は、本実施例の安定化機構170が設けられた靴の下面図を示す図である。
【図17】図17は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。
【図18】図18は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。
【図19】図19は、側方張り出しタイプの安定化機構を示す図である。
【図20】図20は、独立回転タイプの安定化機構を示す図である。
【図21】図21は、フラップ型の安定化機構を示す図である。
【発明を実施するための形態】
【0032】
以下に、本発明にかかる、動作安定支援装置、および、動作安定支援方法の実施の形態を図面に基づいて詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。例えば、以下の実施の形態においては、靴等の下肢装具を足に装着して実施するため、足と地面とは靴底を介して接地しているものとして説明することがあるが、本発明はこれに限られず、少なくとも圧力センサを介して接地している部分があればよく、下肢装具は、圧力センサや安定化機構を装着するためのものであれば必ずしも靴の形態に限られない。
【0033】
[本発明の実施の形態の概要]
以下、本発明の実施の形態の概要について、まず図1〜図5を参照して基本原理を説明し、その後、本実施の形態の構成および処理等について詳細に説明する。図1〜図5は、本実施の形態の基本原理を示す足(靴底)接地部分の図である。
【0034】
歩行時や起居動作時等のように、人物が左右2本の足(靴底)を地面に接地している場合、図1に示すような領域が左右の足(靴底)の接地部分となる。ここで、歩行時や起居動作時等の安定性の定量的評価において、支持基底面(BOS(base of support),以下、単に「BOS」と呼ぶ場合がある。)という概念が重要である。
【0035】
支持基底面(BOS)とは、両足立ちの場合、地面で着地している両足で囲まれた投影面積(図2の網掛け部分)であり、片足立ち立ちの場合、地面に接地した足(靴)による投影面積(片足の靴底の面積)と定義される。
【0036】
ここで、身体重心位置(COG(center of gravity),以下、単に「COG」と呼ぶ場合がある。)は、身体重心を地面(床面)に投影した点である。図3に示すように、身体重心位置(COG)が支持基底面(BOS)の内部にあれば、歩行や起居動作や方向転換等の動作は、安定性があり安全である。
【0037】
しかし、身体重心位置(COG)が支持基底面(BOS)の外に出れば安定性は損なわれ、速やかにCOGをBOSの内側に戻せなければ転倒に至る。高齢者や脳脊髄障害患者においては、体の傾きの補正能力が低下しているため、躓きや方向転換や立ち座り等の動作時に、COGがBOSの外に出てしまった場合、転倒の危険が急激に大きくなる。特に、歩行時の片足接地時には、BOSが靴底のみの狭い面積となる不安定な時間が存在する。
【0038】
さらに、片麻痺患者等のように内反尖足である場合には、図4に示すように、麻痺足(患側の足)の靴底全面で接地できず、靴底の外側でのみ接地する不安定な歩行となる。そして、重心移動の際、COGはBOSの障害側の側方に外れ易くなる結果、容易に障害側にバランスを崩し、患側下肢で踏みとどまれず補正不能となり側方転倒に至る。
【0039】
そのため、本実施の形態においては、側方転倒の可能性がある場合に、図5に示すように安定支持板を展開させて、身体重心位置(COG)が内側となるよう支持基底面(BOS)を拡大させることにより、歩行時や起居動作時の不安定性を改善することを目的とする。
【0040】
本実施の形態は、概略的に、以下の基本的特徴を有する。すなわち、本実施の形態の動作安定支援装置は、少なくとも制御部を備え、利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続される。
【0041】
そして、本実施の形態の動作安定支援装置は、圧力センサにより検出された圧力に基づいて、重心位置を算出する。
【0042】
そして、本実施の形態の動作安定支援装置は、算出した重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定する。
【0043】
そして、本実施の形態の動作安定支援装置は、側方転倒の可能性が判定された場合に、安定化機構を制御して安定支持板を展開させる制御を行う。なお、側方転倒の可能性が判定された場合に自動的に安定支持板を展開させるのではなく、側方転倒の可能性が判定された場合に、出力部を介して利用者に側方転倒の可能性を告知し、利用者から入力部を介して入力があった場合に(すなわち、手動制御により)安定支持板を展開させてもよい。
【0044】
以上が本実施の形態の概要である。これにより、安定支持板の展開によって支持基底面(BOS)が麻痺側などの不安定側に大きく広がるため、安定性が確保され、起居動作や歩容が改善し、転倒防止効果が得られる。また、安定支持板は、内反による患側内側の浮き上がりを抑制する作用も有するので、これによる歩容安定効果も得られる。その結果、特に高齢者や脳脊髄障害患者(例えば片麻痺患者)等の利用者において、起居動作や歩容の改善によるADL(Activities of Daily Living)の向上を図ることができる。また、転倒を防止し、特に側方転倒の抑制による大腿骨骨折を予防することができる。
【0045】
[動作安定支援装置の構成]
次に、動作安定支援装置の構成について図6〜図9を参照して説明する。図6は、本実施の形態が適用される動作安定支援装置の構成の一例を示すブロック図であり、該構成のうち本実施の形態に関係する部分のみを概念的に示している。
【0046】
図6に示すように、本実施の形態の動作安定支援装置100は、概略的に、制御部102と入出力制御インターフェース108と記憶部106を備える。ここで、制御部102は、動作安定支援装置100の全体を統括的に制御するCPU等である。また、入出力制御インターフェース108は、各種センサ110〜140および入力部150や出力部160や安定化機構170に接続されるインターフェースである。また、記憶部106は、各種のデータベースやテーブルなどを格納する装置である。これら動作安定支援装置100の各部は任意の通信路を介して通信可能に接続されている。動作安定支援装置100の各部の通信は、有線によるものに限らず、無線通信であってもよく、例えば光通信方法を適用してもよい。
【0047】
ここで、動作安定支援装置100は、既知のマイクロコンピュータや、パーソナルコンピュータ、ワークステーション等の情報処理装置として構成してもよく、また、該情報処理装置に任意の周辺装置を接続して構成してもよい。パーソナルコンピュータに比べ重量や消費電力等の観点から実用的であるので、好適には、マイクロコンピュータとして構成する。マイクロコンピュータとして構成する場合、市販のワンチップマイコン(one−chip microcomputer)を用いることができる。例えば、microchip社製や、Atmel社製、Texas Instruments社製、ルネサス社製、NEC社製、hitachi社製等の8ビットから32ビット組み込み用マイコン等を用いてもよい。動作安定支援装置100をマイコンとして構成した場合、マイコンを含めた電子回路は名刺サイズに収めることができるので、利用者のベルト等に装着することができ、好適である。なお、電源は、例えば、乾電池、リチウム電池、ニッケル水素充電池等を用いることができる。
【0048】
図6において、記憶部106は、固定ディスク装置等のストレージ手段であり、例えば、記憶部106は、各種処理に用いる各種のプログラムや、テーブル、ファイル、データベース等を格納する。
【0049】
また、図6において、入出力制御インターフェース部108は、各種センサ110〜140や、入力部150、出力部160、および安定化機構170の制御を行う。ここで、入出力制御インターフェース部108は、これら各部110〜170と、制御部102との間における有線または無線での通信制御を行う機能を有してもよい。例えば、入出力制御インターフェース部108は、各種センサ110〜140にて検出された検出信号または検出データや、入力部150を介して入力された入力データを、制御部102に伝達する機能を有し、また、制御部102から出力部160への出力データや、制御部102から安定化機構170への制御データを伝達する機能を有する。
【0050】
また、図6において、圧力センサ110は、靴底の接地面の圧力を検出する圧力検出手段である。例えば、圧力センサ110は、圧電素子等により接地面の圧力を電気信号に変換する圧電センサ等である。また、圧力センサ110は、足の裏にかかる圧力(荷重)を感知するため、靴底(例えば、足裏が接触する中敷き等の部分や、中敷きと靴本体との間や、地面と接触する靴裏部分等)に設けられる。一例として圧力センサ110は、足の前内側(親指の付け根付近)、前外側(小指の付け根付近)、および、踵の3箇所の位置に設置される。ここで、図7は、本実施の形態における圧力センサ110の構成の一例を示す図である。
【0051】
図7に示すように、本実施の形態における圧力センサ110は、一例として、右足の前内側圧センサ111R、前外側圧センサ112R、踵圧センサ113Rと、左足の前内側圧センサ111L、前外側圧センサ112L、踵圧センサ113Lからなり、両足の各圧力センサ111L,R〜113L,Rにより検出された信号は、制御部102に入力される。なお、本実施の形態の圧力センサ110の構成は、これに限られず、利用者が片麻痺患者等のように患側の片方の足のみが内反尖足等により側方転倒の虞がある場合は、当該患側の足の靴底のみに圧力センサを設置してもよい。
【0052】
再び図6に戻り、加速度センサ120は、加速度を検出する加速度検出手段である。ここで、加速度センサ120は、利用者の歩行時や起居動作時の加速度が検出できるように、利用者(例えば、利用者の重心付近や四肢)に装着される。また、加速度センサ120は、加速度の検出軸数が3軸である、3軸加速度センサであってもよく、地球の重力加速度を検出することにより利用者の傾きを検出できるよう構成してもよい。
【0053】
また、図6において、ジャイロセンサ130は、角速度や角度の変化を検出する角速度検出手段である。ここで、ジャイロセンサ130は、利用者の歩行時や起居動作時の角速度が検出できるように、利用者(例えば、利用者の重心付近や四肢や靴)に装着される。また、ジャイロセンサ130は、角速度の検出軸数が2軸である、2軸ジャイロセンサであってもよく、利用者の重心付近の角速度を検出することにより利用者の身体重心を中心とした回転モーメント(トルク)を検出できるよう構成してもよい。
【0054】
また、図6において、曲げセンサ140は、曲げ角度を検出する曲げ角度検出手段である。ここで、曲げセンサ140は、利用者の歩行時や起居動作時における関節(膝関節や股関節、肘関節、手首関節、指関節等)の曲げ角度が検出できるように利用者(例えば、健常側または患側の四肢)に装着される。例えば、曲げセンサ140は、曲がる角度により抵抗値が変化する曲げ歪み検出センサであってもよい。
【0055】
なお、以上の各種センサ110〜140からの制御部102への入力は、アナログ入力であってもよく、デジタル入力であってもよい。
【0056】
また、図6において、入力部150は、利用者により入力される各種入力データや入力情報等を取得する入力手段である。例えば、入力部150としては、スイッチや、キーボード、マイク等を用いることができる。なお、一例として、スイッチ等の入力部150は、腕時計型として手首に装着できるよう構成してもよく、杖やベルト等に設けてもよい。なお、入力部150として、上述した指関節等に設けられる曲げセンサ等を用いることも可能である。
【0057】
また、図6において、出力部160は、各種出力データや出力情報等を出力する出力手段である。例えば、出力部160としては、LED(Light Emitting Diode)等の発光装置や、液晶画面等のモニタや、スピーカ等を用いることができる。なお、一例として、LEDやスピーカ等の出力部160は、靴の上面に設けてもよく、腕時計型として手首に装着できるよう構成してもよく、また、ベルト等に設けてもよい。
【0058】
また、図6において、安定化機構170は、少なくとも一方の足(靴)の側方(例えば、患側の足の外側方向や側後方)に安定支持板を展開可能な安定化機構である。ここで、安定化機構170は、展開させた安定支持板を元の位置付近に収納可能に構成されてもよい。図8および図9は、本実施の形態における安定化機構170の構成の一例を示す図である。なお、図8は、収納時の安定化機構170を示し、図9は、展開時の安定化機構170を示している。
【0059】
図8および図9に示すように、安定化機構170は、靴底に固定される2枚の靴底固定板171,172と、2枚の靴底固定板171,172にそれぞれリンクピンを介して回動可能に設けられる2枚のリンク部材173,174と、2枚のリンク部材173,174にリンクピンを介して回動可能に設けられる安定支持板175からなるリンク機構を有し、リンク機構を駆動するためのモータ176を備える。
【0060】
本実施の形態において、2枚のリンク部材173,174は同じ長さであり、平行リンク(parallelogram linkage)となっている。そのため、安定支持板175は、図9の矢印で示すように、収納時から展開時にかけて傾くことなく側方に突出する。ここで、靴底固定板171,172は、地面と接触する靴裏部分に固定することも可能であるが、靴裏の接地面の平面化や、滑りを抑制する観点等から、中敷きと靴本体との間等の靴本体側に固定してもよい。
【0061】
なお、利用者が装着する靴等の下肢装具は、任意のものでよく、例えば、市販の靴を用いることができる。好適には、地面との滑りを抑制するために、靴底素材は、ゴムや、合成ゴム、シリコンゴム等の所定以上の摩擦係数を得られる素材が望ましい。
【0062】
また、モータ176は、リンク機構を駆動させる手段であり、一例として図8および図9に示すように、靴底固定板171とリンク部材173の間のリンクピンを介した回転角を制御可能に設けられる。すなわち、モータ176が回転角度を広げる方向に駆動することにより安定支持板175が展開時の位置に移動し(図9)、反対に、モータ176が回転角度を狭める方向に駆動することにより安定支持板175が収納時の位置に移動する(図8)。ここで、モータ176としては、サーボモータや、ステッピングモータや、ブラシレスモータ等を用いてもよい。
【0063】
再び図6に戻り、制御部102は、OS(Operating System)等の制御プログラムや、各種の処理手順等を規定したプログラム、および、所要データを格納するための内部メモリを有する。そして、制御部102は、これらのプログラム等により、種々の処理を実行するための情報処理を行う。ここで、制御部102は、機能概念的に、重心位置算出部102a、加速度取得部102b、角速度取得部102c、曲げ角度取得部102d、転倒可能性判定部102e、転倒可能性告知部102f、および、安定化機構制御部102gを備える。
【0064】
このうち、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出する重心位置算出手段である。例えば、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出してもよい。また、重心位置算出部102aは、身体重心を地面に投影した点である身体重心位置(COG)を重心位置として算出してもよく、ZMPを重心位置として算出してもよい。なお、重心位置算出部102aは、現在の重心位置を算出することに限られず、次の足の接地位置を予測した重心位置(例えば、目標ZMP等)を算出してもよく、重心位置を算出するために、圧力センサ110により検出される圧力値データの他、各種センサ120〜140にて検出されるデータや、予め入力され記憶部106に記憶された利用者の体重や身長や歩幅、身体重心位置の高さ等のデータを用いてもよい。
【0065】
ここで、本実施の形態では、非特許文献1と同様に、利用者の前後方向をy方向として、利用者の左右方向をx方向として、利用者の上下方向をz方向として説明する。一例として、重心位置算出部102aは、接地面(z=0のxy座標面)における圧力の荷重分布等の重心位置を算出する。より具体的には、重心位置算出部102aは、靴底の各圧力センサ111L,R〜113L,Rにより検出された圧力値、および、予め記憶部106に記憶された各圧力センサ111L,R〜113L,Rのxy座標に基づいて、利用者の靴底接地面の圧力(荷重)分布を算出し、または、更にこの圧力(荷重)分布に基づいて足定圧中心(center of pressure(COP))における荷重を算出する。なお、本実施の形態は、xy座標の重心位置を算出することに限られず、重心位置算出部102aにより算出された重心位置に基づいて転倒可能性判定部102eにより側方の(すなわちx方向の)転倒の可能性が判定されることから、y方向の重心位置の計算を行わずに、x座標のみの重心位置の計算を行ってもよい。
【0066】
また、重心位置算出部102aは、算出した圧力(荷重)分布から足定圧中心(COP)の荷重を算出し、更に、加速度センサ120により検出された身体重心の加速度や、ジャイロセンサ130により検出された身体重心回りの角速度あるいは角加速度や、記憶部106に記憶された利用者の身体重心位置の高さ等のデータ等を用いて、非特許文献1等に記載の公知の計算手法により、現在の又は予測される身体重心位置(COG)やZMPを算出してもよい。
【0067】
また、加速度取得部102bは、加速度センサ120により検出される加速度を取得する加速度取得手段である。例えば、加速度センサ120が3軸加速度センサである場合、加速度取得部102bは、加速度センサ120から伝達されるアナログ入力信号当に基づいて、3軸(例えば、x,y,z方向)の加速度を取得する。
【0068】
また、角速度取得部102cは、ジャイロセンサ130により検出される角速度を取得する角速度取得手段である。例えば、ジャイロセンサ130が2軸ジャイロセンサである場合、角速度取得部102cは、ジャイロセンサ130から伝達されるアナログ入力信号等に基づいて、2軸の角速度を取得する。
【0069】
また、曲げ角度取得部102dは、曲げセンサ140により検出される曲げ角度を取得する曲げ角度取得手段である。例えば、曲げセンサ140が曲がる角度により抵抗値が変化する曲げ歪み検出センサである場合、曲げ角度取得部102dは、曲げセンサ140から伝達されるアナログ入力信号(抵抗値により変動する電流値等)に基づいて、曲げ角度を取得する。
【0070】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段である。図2を参照して上述したように、支持基底面(BOS)の側方の境界は、靴底の接地面の境界と一致する。そのため、転倒可能性判定部102eは、一例として、重心位置算出部102aにより算出された接地面(xy平面)における重心位置の座標が、予め記憶部106に記憶された靴底領域に基づく支持基底面(BOS)の側方の境界ラインより外側となるか否かを判定することにより、側方転倒の可能性を判定する。なお、転倒可能性判定部102eは、現在の重心位置が支持基底面(BOS)の外側であるか否かを判定することに限らず、現在の重心位置が支持基底面(BOS)の内側であるものの、許容範囲を超えて外側に近づいたか否かを判定することにより、将来の重心位置が支持基底面(BOS)の外側となるか否かを判定してもよい。
【0071】
例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、側方転倒の可能性ありと判定してもよい。すなわち、側方転倒の例として、歩行中にバランスを崩した場合、バランスを崩した方向の足の外側に大きい荷重がかかる。例えば、右側によろけた場合、総じて左足より右足の荷重分布が高くなり、しかも、右足の小指の付け根付近に設けられた前外側圧センサ112Rからの圧力値が大幅に増加する。したがって、このような圧力分布(荷重分布)が重心位置算出部102aにより算出された場合、重心位置が支持基底面(BOS)の範囲の境界付近となるので、転倒可能性判定部102eは、右外側方向によろけて転倒し始めたと側方転倒の可能性を判定することができる。また、単にバランスを崩した場合に限らず、足の状態が内反となっている場合も、通常とは異なる圧力分布(荷重分布)が検出されるので、上記と同様に、転倒可能性判定部102eは、内反による側方転倒の可能性を判定することができる。
【0072】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された現在のZMPやZMPの軌跡が許容範囲を超えてBOS外側に近づいたか否かを判定することにより、将来のZMPが支持基底面(BOS)の外側となるか否かを判定してもよく、重心位置算出部102aにより算出された目標ZMP(次の足接地位置を予測した重心位置)が支持基底面(BOS)の外側であるか否かを判定してもよい。また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置の座標が、支持基底面(BOS)の境界を規定するx座標値よりも側方となるか否かを判定することにより、側方転倒の可能性を判定してもよい。なお、上述した許容範囲は、利用者の下肢筋力や運動機能等に応じて任意の値を設定することができる。
【0073】
また、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置に加えて、更に、加速度取得部102bにより取得された加速度や、角速度取得部102cにより取得された角速度や、曲げ角度取得部102dにより取得された曲げ角度等に基づいて、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、加速度や角速度や曲げ角度等が基準値以上または基準値未満となったタイミングで、転倒可能性を判定することにより、利用者の歩行動作や起居動作等に連動して、安定支持板175が展開または収納されるよう判定を行うことができる。より具体的には、転倒可能性判定部102eは、歩行時の左右の足を交互に動かす際に発生する、加速度または重力加速度に基づく利用者の傾き等の変化や角速度の変化や関節の曲げ角度の変化等に連動させて、側方転倒の可能性ある患側の足に荷重が移動したタイミングで、転倒可能性判定部102eが安定支持板を展開させるための判定を行うことができる。また、これに限らず、起居動作時に発生する、加速度または重力加速度に基づく利用者の傾き等の変化や角速度の変化や関節の曲げ角度の変化等に連動させて、利用者が立ち上がろうとするタイミングや座り込もうとするタイミングで、転倒可能性判定部102eが安定支持板を展開させるための判定を行うことができる。
【0074】
また、転倒可能性告知部102fは、転倒可能性判定部102eにより支持基底面の外側となると判定された場合、すなわち側方転倒の可能性があると判定された場合に、出力部160を介して利用者に側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段である。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0075】
また、安定化機構制御部102gは、安定化機構170を制御して安定支持板175を展開または収納させる制御を行う安定化機構制御手段である。例えば、安定化機構制御部102gは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合には、安定化機構170のモータ176を制御して安定支持板175を展開させ、正常歩行時等のように転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行う。また、安定化機構制御部102gは、スイッチや曲げセンサ等の入力部150を介した入力と連動させて、安定支持板175を展開または収納させる安定化機構170の制御を行ってもよい。なお、安定化機構制御部102gが、前者の転倒可能性判定部102eの判定結果に基づく自動制御を行うか、後者の入力部150を介した入力に基づく手動制御を行うかは、制御モード切替スイッチ等の入力部150からの入力に応じて切り替え可能に構成してもよい。
【0076】
以上が、本実施の形態における動作安定支援装置100の構成の一例である。
【0077】
[動作安定支援装置100の処理]
次に、このように構成された本実施の形態における動作安定支援装置100の処理の一例について、以下に図10および図11を参照して詳細に説明する。
【0078】
[自動制御処理]
まず、動作安定支援装置100が転倒可能性の判定結果に基づいて自動的に安定化機構170を制御する自動制御処理の一例について図10を参照して説明する。ここで、図10は、本実施の形態における動作安定支援装置100の自動制御処理の一例を示すフローチャートである。
【0079】
まず、重心位置算出部102aは、圧力センサ110により検出された圧力を取得する(ステップSA−1)。例えば、重心位置算出部102aは、両足の前内側圧センサ111、前外側圧センサ112、踵圧センサ113から検出される各圧力値を取得する。ここで、利用者が片麻痺患者等のように患側の側方のみに転倒の可能性があることが予め分かっている場合は、患側の足側の圧力センサ110の圧力値を取得してもよい。
【0080】
そして、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出し、更に、転倒可能性判定部102eは、当該重心位置に基づいて転倒危険度(側方転倒の可能性(姿勢不安定性)を数値化したもの)を計算する(ステップSA−2)。例えば、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出する。また、重心位置算出部102aは、足定圧中心(COP)や身体重心位置(COG)やZMP等を重心位置として算出してもよい。その際、重心位置算出部102aは、非特許文献1等に記載の公知の計算手法により必要に応じて、加速度センサ120により検出された身体重心の加速度や、ジャイロセンサ130により検出された身体重心回りの角速度あるいは角加速度や、記憶部106に記憶された利用者の身体重心位置の高さ等のデータ等を用いて、重心位置の計算を行ってもよい。
【0081】
そして、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が、側方向への重心位置偏倚を呈しているか、支持基底面(BOS)の外側となるか等を判定することにより、側方転倒の可能性(転倒危険性)を判定する(ステップSA−3)。例えば、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、内反尖足やバランスを崩した状態として側方転倒の可能性があると判定してもよい。また、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。その際、転倒可能性判定部102eは、現在の重心位置が支持基底面(BOS)の外側であるか否かを判定することに限らず、現在の重心位置が支持基底面(BOS)の内側であるものの、許容範囲を超えて外側に近づいたか否かを判定することにより、将来の重心位置が支持基底面(BOS)の外側となるか否かを判定してもよい。
【0082】
なお、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置に加えて、更に、加速度取得部102bにより取得された加速度や、角速度取得部102cにより取得された角速度や、曲げ角度取得部102dにより取得された曲げ角度等に基づいて、側方転倒の可能性を判定してもよい。例えば、転倒可能性判定部102eは、加速度や角速度や曲げ角度等が基準値以上または基準値未満となったタイミングで、転倒可能性を判定することにより、利用者の歩行動作や起居動作等に連動して、安定支持板175が展開または収納されるよう判定を行うことができる。
【0083】
そして、転倒可能性判定部102eにより側方転倒の可能性がないと判定された場合(ステップSA−3,No)、動作安定支援装置100は、ステップSA−1に処理を戻し、上述したステップSA−1〜SA−3の処理を繰り返す。
【0084】
一方、転倒可能性判定部102eにより側方転倒の可能性ありと判定された場合(ステップSA−3,Yes)、転倒可能性告知部102fは、出力部160を介して利用者に側方転倒の可能性(転倒危険性)を、警告音や光等により警告する出力制御を行う(ステップSB−4)。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0085】
そして、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を展開させる制御を行う(ステップSA−5)。
【0086】
そして、安定化機構制御部102gは、一定時間展開後、立位・歩行が安定すれば、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行う(ステップSA−6)。例えば、安定化機構制御部102gは、転倒可能性判定部102eにより側方転倒の可能性(転倒危険性)がなくなったと判定された場合に、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行ってもよい。
【0087】
そして、動作安定支援装置100は、上述したステップSA−1〜SA−6の処理を繰り返し行う。
【0088】
以上が、本実施の形態における動作安定支援装置100の自動制御処理の一例である。
【0089】
[手動制御処理]
次に、動作安定支援装置100が転倒可能性の判定結果を出力し、利用者による入力に応じて安定化機構170を制御する手動制御処理の一例について図11を参照して説明する。ここで、図11は、本実施の形態における動作安定支援装置100の手動制御処理の一例を示すフローチャートである。
【0090】
まず、重心位置算出部102aは、圧力センサ110により検出された圧力を取得する(ステップSB−1)。上述のように、例えば、重心位置算出部102aは、両足の前内側圧センサ111、前外側圧センサ112、踵圧センサ113から検出される各圧力値を取得する。
【0091】
そして、重心位置算出部102aは、圧力センサ110により検出された圧力に基づいて、接地面における重心位置を算出する(ステップSB−2)。例えば、上述のように、重心位置算出部102aは、圧力センサ110の各圧力センサ111L,R〜113L,Rにより検出された圧力に基づく圧力分布(荷重分布)を重心位置として算出してもよく、足定圧中心(COP)や身体重心位置(COG)やZMP等を重心位置として算出してもよい。
【0092】
そして、転倒可能性判定部102eは、重心位置算出部102aにより算出された重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定する(ステップSB−3)。例えば、上述のように、転倒可能性判定部102eは、重心位置算出部102aにより算出された圧力分布(荷重分布)に基づいて、前外側圧センサ112にかかる荷重が、前内側圧センサ111や踵圧センサ113にかかる荷重と比較して、設定値を超えて大きくなる場合に、内反尖足やバランスを崩した状態として側方転倒の可能性があると判定してもよい。また、上述のように、転倒可能性判定部102eは、重心位置算出部102aにより算出された身体重心位置(COG)やZMPや足定圧中心(COP)等の重心位置が支持基底面(BOS)の外側となるか否かを判定することにより、側方転倒の可能性を判定してもよい。
【0093】
そして、転倒可能性判定部102eにより側方転倒の可能性がないと判定された場合(ステップSB−3,No)、動作安定支援装置100は、ステップSB−1に処理を戻し、上述したステップSB−1〜SB−3の処理を繰り返す。
【0094】
一方、転倒可能性判定部102eにより側方転倒の可能性ありと判定された場合(ステップSB−3,Yes)、転倒可能性告知部102fは、出力部160を介して利用者に側方転倒の可能性を警告する出力制御を行う(ステップSB−4)。例えば、転倒可能性告知部102fは、正常歩行時、すなわち転倒可能性判定部102eにより側方転倒の可能性があると判定されていない場合は、出力部160の緑色LEDを点灯させておき、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、出力部160の警告用の赤色LEDを点灯させてもよい。また、転倒可能性告知部102fは、転倒可能性判定部102eにより側方転倒の可能性があると判定された場合に、スピーカ等の出力部160に警告音を音声出力させてもよく、液晶画面等の出力部160に、警告メッセージ等を表示出力させてもよい。
【0095】
そして、安定化機構制御部102gは、スイッチや曲げセンサ等の入力部150を介して利用者から展開指示の入力があるか否かを判定する(ステップSB−5)。
【0096】
入力部150を介した展開指示の入力がない場合(ステップSB−5,No)、動作安定支援装置100は、ステップSB−1に処理を戻し、上述したステップSB−1〜SB−5の処理を繰り返す。
【0097】
一方、入力部150を介して利用者より展開指示の入力があった場合(ステップSB−5,Yes)、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を展開させる制御を行う(ステップSB−6)。
【0098】
以上が、本実施の形態における動作安定支援装置100の手動制御処理の一例である。なお、動作安定支援装置100は、上述したステップSB−1〜SB−6の処理を繰り返し行ってもよく、その際、利用者から入力部150を介した収納指示の入力が合った場合や、ステップSB−3にて転倒可能性判定部102eにより側方転倒の可能性がなくなったと判定された場合に、安定化機構制御部102gは、安定化機構170のモータ176を制御して安定支持板175を収納させる制御を行ってもよい。また、動作安定支援装置100は、上述したステップSB−1〜SB−4までの処理を行わない構成としてもよく、その場合、曲げセンサ等の入力部150からの入力に応じて関節の曲げ角度の変化等に連動させて、安定支持板175を展開または収納させる制御を行ってもよい。
【0099】
[実施例]
つづいて、上述した実施の形態における実施例について、図12〜図18を参照して説明する。ここで、まず、本実施例の動作安定支援装置が開発された背景について説明する。
【0100】
運動障害者や高齢者において、安定した歩行の維持は日常生活において不可欠である。しかし、高齢者では筋力と運動能力の低下により、また、脳脊髄疾患患者では麻痺のため、歩行時ならびに起居動作時の安定性が損なわれている。この結果、日常生活動作(ADL)の低下と転倒危険性増大を招いている。
【0101】
そのため、従来、歩行ならびに起居動作時の運動機能改善あるいは姿勢安定性向上の方法として、下肢装具や、杖、手すり、歩行器が使用されている。
【0102】
脳脊髄疾患患者では、下肢装具を装着して歩容の改善をめざすことが多い。これらの患者における歩容異常には内反尖足が大きく関与している。内反尖足とは、足底が外側にかたむくため足裏の内側(親ゆび側)を接地できず、着地面積が減少して立位が不安定になる状態のことを指す。
【0103】
内反尖足の一因として、痙性マヒがある。脳卒中後遺症や、脳腫瘍、脊髄外傷、脊髄腫瘍などにより脳および脊髄障害を受けた後、下肢の運動障害をきたす症例は極めて多く、特に、これらの患者では、痙性マヒを示すことが多い。痙性マヒとは、上位中枢神経の障害により下位神経系への抑制が解除されて(release phenomenon)、筋肉のれん縮・痙縮をともなう四肢体幹の運動障害を示す病態である。痙性マヒのなかで、脳卒中後遺症患者数が圧倒的に多い。痙性マヒ患者においては、足は内反・尖足(つま先立ちになり、足の甲が外側に傾いた状態)となり、程度の差あるが膝は伸長位をとる。このため、痙性マヒ患者では、歩行時の安定性が大きく損なわれることになる。
【0104】
従来、脳脊髄疾患患者では、内反尖足を靴型装具を用いて矯正している。靴型装具は、バスケットシューズのような形態で、足首関節を直角位置に固定するものであり、麻痺側の足裏全体を着地させて立位・歩行の安定化をめざすものである。
【0105】
しかし、靴型装具で麻痺側の足裏を地面に接地できたとしても、すなわち足裏の外側と内側ともに接地したとしても、麻痺側下肢には筋力低下が存在するうえ、運動制御ループも障害(小脳や大脳基底核、さらには感覚神経入力の障害)されているので、患側のみでの片足立ちは依然として不安定であり、歩行時の患側下肢荷重時間、すなわち患側下肢での片足立ち期間は最小限にならざるをえない。
【0106】
この結果、患者(多くが脳卒中の片麻痺であり痙性マヒが認められる。)では、特有の不安定歩行(患側下肢の膝関節が伸展し、患側下肢全体を外側に旋回させる、いわゆる振り回し歩行)が認められることになり、日常生活において十分な歩行速度と安定性は得られない。
【0107】
一方、一般の高齢者では、内反尖足は認められないものの、下肢筋力低下と運動機能の低下が加齢と共に顕著となる。このため高齢者においても歩行・起居動作時の安定性確保と転倒防止は重要である。
【0108】
一般に、歩行時(片足接地時)には、支持基底面(BOS)が靴底のみの狭い面積となる時間が存在する。ここで、従来の杖も支持基底面(BOS)の拡大効果を有する。しかし、脳脊髄疾患患者では患側上肢にも麻痺が認められる事が多いため、脳卒中患者の場合には患側下肢の安定性向上は杖では得られないのが普通である。
【0109】
そこで、本願発明者らは、高齢者や脳脊髄疾患患者において、特に麻痺足等の片足接地時に、支持基底面(BOS)を拡大できれば、歩行・起居動作の不安定性は改善されるとの着想を得た。すなわち、転倒危険時に支持基底面(BOS)を動的に変化させるインテリジェント靴を開発すれば、起居動作と歩行安定性向上と転倒ダメージ軽減が可能となる。そのため、起居動作および歩行の際に、靴の面積を側方・側後方に広げて支持基底面(BOS)を広げ、また、転倒危険時には支持基底面(BOS)を転倒方向に瞬時に広げて転倒を抑制し、もし転倒が不可避となれば身体ダメージが最小となるよう転倒方向と加速度を制御できるインテリジェント靴を開発した。
【0110】
ここで、図12は、本実施例のインテリジェント靴を実現する動作安定支援装置の装着例を示す図である。なお、本実施例において、上述した実施の形態の動作安定支援装置に対応する構成には、その符号を参照して説明を行う。
【0111】
図12に示すように、利用者が装着するベルトには、制御部102を備えたマイコンが設けられており、マイコンには、ジャイロセンサ130や加速度センサ120が接続されている。また、利用者が装着する靴には、圧力センサ110と、LEDランプの出力部160と、安定化機構170が設けられている。なお、マイコンには、図示しない無線装置等の入出力制御インターフェース108が接続されており、この入出力制御インターフェース108を介して無線通信により、圧力センサ110や出力部160や安定化機構170等と信号伝達が可能となっている。なお、この無線装置を介して、携帯電話やパーソナルコンピュータ等に、各センサからの入力値や転倒可能性の判定結果等の運動機能情報を送信することも可能である。
【0112】
ここで、図13および図14は、本実施例の安定化機構170が設けられた靴の上面図を示す図であり、図15および図16は、本実施例の安定化機構170が設けられた靴の下面図を示す図であり、図17および図18は、本実施例の安定化機構170が設けられた靴の側面図を示す図である。なお、図13、図15、および図17は、収納時の安定化機構170の状態を表し、図14、図16、および図18は、展開時の安定化機構170の状態を表している。なお、図示しないが、前内側圧センサ111Rと、前外側圧センサ112Rと、踵圧センサ113Rからなる圧力センサ110は、図7にて図示した配置で、中敷きと靴本体との間に設けられている。
【0113】
本実施例の安定化機構170は、靴底に固定される2枚の靴底固定板171,172と、2枚の靴底固定板171,172にそれぞれリンクピンを介して回動可能に設けられる2枚のリンク部材173,174と、2枚のリンク部材173,174にリンクピンを介して回動可能に設けられる安定支持板175からなるリンク機構を有し、リンク機構を駆動するためのサーボモータ等のモータ176を備える。
【0114】
図13に示すように、本実施例では、収納時にも側方向へ2cmほど安定支持板175が突出しており、安定化機構170をしない場合の通常の靴よりも、側方転倒予防効果を大きくしている。なお、収納時の動作安定支援効果を期待しないのであれば、靴底側に安定支持板175を配置することにより、収納時に支持基底面(BOS)を通常の靴と同一にすることも可能である。
【0115】
図14に示すように、展開時には、モータ176が、長さ5センチの平行リンクを駆動し、安定支持板175が展開して側方に突出する。これにより、体軸の側方向への過度の変異を抑制でき、万一の転倒の際にも、大腿骨骨折の危険性が大きい側方転倒のリスクを小さくすることができる。なお、リンクピンを外して他のリンク穴に再設置することにより、長さの異なるリンクに容易に変更することも可能である。実施例の安定化機構170では、利用者の体格や障害の程度に応じて、リンク長を1cm〜10cm程度の範囲で自由に調整することができる。
【0116】
また、図15および図16に示すように、靴裏部分には、靴底固定板171,172が固定されている。好適には、靴底固定板171,172は、靴のヒールの高さより地面側に突出しないように、靴底のゴムを一部くり抜いて設けられる。
【0117】
また、図15および図16に示すように、安定支持板175の裏面部には、靴の外後方まで約1cmほど靴底ゴムを回り込ませて設置している。これにより、後方にバランスを崩した際の安定性改善に寄与している。また、これ以上後方に靴底ゴムを突出させると、階段を降りる際や歩行時に引っかかる虞があり、かえって歩行が不安定となる場合があるため、この構成が好適である。
【0118】
また、図17および図18に示すように、安定支持板175の取り付け角度を調整することにより、収納時(折り畳み時)には踵側(後方)の安定支持板175の靴底ゴムは地面と接しないが、展開時には接地させる仕様とすることができる。これは、収納時の安定支持板175の引っかかりによるバランス障害や転倒危険を防ぐためであり、特に階段昇降時に好適である。
【0119】
また、靴の上面のつま先側付近には、赤色と緑色の2色のLEDランプからなる出力部160が設けられる。そして、前外側圧センサ112Rが設定値以上の圧(体重変移)を検出した場合には、赤色のLEDランプが点灯し、バランス異常が認められないときには緑色LEDランプが点灯するよう構成される。あるいは、2色のLEDランプからなる出力部160に替えて、多段LEDアレイ等の出力部160を用いて、体重変移あるいは歩行バランス異常の度合いを多段階で表示してもよい。
【0120】
以上のように構成された本実施例のインテリジェント靴を実現する動作安定支援装置100は、上述の自動制御処理と同様の処理を行い、圧センサ(内側圧センサ111,外側圧センサ112,および踵圧センサ113)から検出される圧力を比較して展開設定値を超えて大きくなり、安定支援が必要と判断した場合には(靴外側部への加重が一定以上になる場合、または内側および踵部への加重に比較して外側部への加重が一定比以上に増大した場合など)、マイコンの指令により、サーボモータ176が自動的に安定支持板175を展開させて靴底面積を外側方に広げることができる。なお、片麻痺患者などでは、通常の起立着席動作や歩行動作時にも安定支持板175を展開させたままにすることもできる。また、着席時には、椅子脚との接触や躓き等を避けるため、収納することも可能である。
【0121】
なお、本実施例のインテリジェント靴を用いて健常人に対して実験を行った結果、安定立位保持時(肩幅に平行に両足を置いた立位保持状態)の側方向の安定性の向上が観察された。すなわち、安定支持板175の収納時には、約70ニュートンの力で側方向から肩を押すとバランスを崩すのに対し、安定支持板175の展開時には、約120ニュートンになるまで側方向から肩を押してもバランスを崩さず、側方向の安定性の向上が確かめられた。
【0122】
以上で、本実施例の説明を終える。
【0123】
[他の実施の形態]
さて、これまで本発明の実施の形態について説明したが、本発明は、上述した実施の形態以外にも、特許請求の範囲に記載した技術的思想の範囲内において種々の異なる実施の形態にて実施されてよいものである。ここで、図19〜図21は、安定化機構170の他のメカニズムを示す図である。なお、斜線部分の構成は、上述の実施の形態の安定支持板に相当するものである。
【0124】
図19は、側方張り出しタイプの安定化機構を示す図である。図19に示すように、単純な機構を採用し、収納時に、安定支持板を靴底内に収納できるよう構成し、展開時には、任意の駆動手段により側方に略水平に突出するよう構成してもよい。
【0125】
図20は、独立回転タイプの安定化機構を示す図である。図20に示すように、2つの安定支持板を別々に回動可能に構成してもよい。そして、展開時および収納時には、モータ等の任意の駆動手段を用いて、2つの安定支持板を独立に回転制御することができる。
【0126】
図21は、フラップ型の安定化機構を示す図である。図21に示すように、靴本体と安定支持板とを蝶番を介して回動可能に構成してもよい。そして、収納時には、靴の外側面に接して地面に略垂直に安定支持板を配置し、展開時には、靴底面と平行になるように安定支持板を倒す駆動手段を用いてもよい。このように、安定化機構は、上述した実施の形態以外にも、技術思想の範囲内において他のメカニズムを採用してもよいものである。
【0127】
また、上述の実施の形態においては、本発明を、高齢者や障害者向けに、靴等の下肢装具に適用した例について説明したが、この場合に限られず、健常者向けに、雪面用の靴など全ての技術分野において、同様に適用することができる。
【0128】
また、上述の実施の形態においては、動作安定支援装置100がスタンドアローンの形態で処理を行う場合を一例に説明したが、動作安定支援装置100は、携帯電話等のクライアント端末からの要求に応じて処理を行い、その処理結果を当該クライアント端末に返却するようにしてもよい。
【0129】
また、実施の形態において説明した各処理のうち、自動的に行われるものとして説明した処理の全部または一部を手動的に行うこともでき、あるいは、手動的に行われるものとして説明した処理の全部または一部を公知の方法で自動的に行うこともできる。
【0130】
このほか、上記文献中や図面中で示した処理手順、制御手順、具体的名称、各処理の登録データやパラメータを含む情報、構成例については、特記する場合を除いて任意に変更することができる。
【0131】
また、動作安定支援装置100に関して、図示の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。
【0132】
例えば、動作安定支援装置100の各装置が備える処理機能、特に制御部102にて行われる各処理機能については、その全部または任意の一部を、CPU(Central Processing Unit)および当該CPUにて解釈実行されるプログラムにて実現してもよく、また、ワイヤードロジックによるハードウェアとして実現してもよい。尚、プログラムは、後述する記録媒体に記録されており、必要に応じて動作安定支援装置100に機械的に読み取られる。すなわち、ROMまたはHDなどの記憶部106などは、OS(Operating System)として協働してCPUに命令を与え、各種処理を行うためのコンピュータプログラムが記録されている。このコンピュータプログラムは、RAMにロードされることによって実行され、CPUと協働して制御部を構成する。
【0133】
また、このコンピュータプログラムは、動作安定支援装置100に対して任意のネットワークを介して接続されたアプリケーションプログラムサーバに記憶されていてもよく、必要に応じてその全部または一部をダウンロードすることも可能である。
【0134】
また、本発明に係るプログラムを、コンピュータ読み取り可能な記録媒体に格納してもよく、また、プログラム製品として構成することもできる。ここで、この「記録媒体」とは、メモリーカード、USBメモリ、SDカード、フレキシブルディスク、光磁気ディスク、ROM、EPROM、EEPROM、CD−ROM、MO、DVD、および、Blu−ray Disc等の任意の「可搬用の物理媒体」を含むものとする。
【0135】
また、「プログラム」とは、任意の言語や記述方法にて記述されたデータ処理方法であり、ソースコードやバイナリコード等の形式を問わない。なお、「プログラム」は必ずしも単一的に構成されるものに限られず、複数のモジュールやライブラリとして分散構成されるものや、OS(Operating System)に代表される別個のプログラムと協働してその機能を達成するものをも含む。なお、実施の形態に示した各装置において記録媒体を読み取るための具体的な構成、読み取り手順、あるいは、読み取り後のインストール手順等については、周知の構成や手順を用いることができる。
【0136】
また、動作安定支援装置100は、該情報処理装置に本発明の方法を実現させるソフトウェア(プログラム、データ等を含む)を実装することにより実現してもよい。
【0137】
記憶部106に格納される各種のファイルやテーブル等は、RAM、ROM等のメモリ装置、ハードディスク等の固定ディスク装置、フレキシブルディスク、および、光ディスク等のストレージ手段であり、各種処理や各種のプログラム、テーブル、データベース、ファイル等を格納する。
【0138】
更に、装置の分散・統合の具体的形態は図示するものに限られず、その全部または一部を、各種の付加等に応じて、または、機能負荷に応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。すなわち、上述した実施形態を任意に組み合わせて実施してもよく、実施形態を選択的に実施してもよい。
【産業上の利用可能性】
【0139】
以上詳述に説明したように、本発明によれば、歩行時や起居動作時の安定性を確保して転倒を防止することができる、動作安定支援装置および動作安定支援方法を提供することができので、医療やリハビリテーション分野、生物学研究や臨床検査、靴製造業、電子機器産業などの様々な分野において極めて有用である。
【符号の説明】
【0140】
100 動作安定支援装置
102 制御部
102a 重心位置算出部
102b 加速度取得部
102c 角速度取得部
102d 曲げ角度取得部
102e 転倒可能性判定部
102f 転倒可能性告知部
102g 安定化機構制御部
106 記憶部
108 入出力制御インターフェース部
110 圧力センサ
111 前内側圧センサ
112 前外側圧センサ
113 踵圧センサ
120 加速度センサ
130 ジャイロセンサ
140 曲げセンサ
150 入力部
160 出力部
170 安定化機構
171,172 靴底固定板
173,174 リンク部材
175 安定支持板
176 モータ
【特許請求の範囲】
【請求項1】
利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項2】
請求項1に記載の動作安定支援装置において、
更に、出力部に接続されており、
上記制御部は、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知手段、
を更に備えたことを特徴とする動作安定支援装置。
【請求項3】
請求項1または2に記載の動作安定支援装置において、
上記安定化機構制御手段は、
上記転倒可能性判定手段により判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、
を特徴とする動作安定支援装置。
【請求項4】
靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段と、
上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項5】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着される加速度センサに接続されており、
上記制御部は、
上記加速度センサにより検出される加速度を取得する加速度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記加速度取得手段により取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項6】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着されるジャイロセンサに接続されており、
上記制御部は、
上記ジャイロセンサにより検出される角速度を取得する角速度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記角速度取得手段により取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項7】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着される曲げセンサに接続されており、
上記制御部は、
上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記角速度取得手段により取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項8】
利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項9】
利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、
上記制御部において実行される、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、
上記重心位置算出ステップにて算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、
上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御ステップと、
を含むことを特徴とする動作安定支援方法。
【請求項10】
請求項9に記載の動作安定支援方法において、
更に、出力部に接続されており、
上記制御部において実行される、
上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知ステップ、
を更に含むことを特徴とする動作安定支援方法。
【請求項11】
請求項9または10に記載の動作安定支援方法において、
上記安定化機構制御ステップは、
上記転倒可能性判定ステップにて判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、
を特徴とする動作安定支援方法。
【請求項12】
靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、
上記制御部において実行される、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、
上記重心位置算出ステップにて算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、
上記転倒可能性判定ステップにて上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知ステップと、
上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御ステップと、
を含むことを特徴とする動作安定支援方法。
【請求項13】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着される加速度センサに接続されており、
上記制御部において実行される、
上記加速度センサにより検出される加速度を取得する加速度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記加速度取得ステップにて取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【請求項14】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着されるジャイロセンサに接続されており、
上記制御部において実行される、
上記ジャイロセンサにより検出される角速度を取得する角速度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記角速度取得ステップにて取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【請求項15】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着される曲げセンサに接続されており、
上記制御部において実行される、
上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記角速度取得ステップにて取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【請求項1】
利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項2】
請求項1に記載の動作安定支援装置において、
更に、出力部に接続されており、
上記制御部は、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知手段、
を更に備えたことを特徴とする動作安定支援装置。
【請求項3】
請求項1または2に記載の動作安定支援装置において、
上記安定化機構制御手段は、
上記転倒可能性判定手段により判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、
を特徴とする動作安定支援装置。
【請求項4】
靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知手段と、
上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項5】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着される加速度センサに接続されており、
上記制御部は、
上記加速度センサにより検出される加速度を取得する加速度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記加速度取得手段により取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項6】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着されるジャイロセンサに接続されており、
上記制御部は、
上記ジャイロセンサにより検出される角速度を取得する角速度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記角速度取得手段により取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項7】
請求項1から4のいずれか一つに記載の動作安定支援装置において、
更に、上記利用者に装着される曲げセンサに接続されており、
上記制御部は、
上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得手段、
を更に備え、
上記転倒可能性判定手段は、
更に、上記角速度取得手段により取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援装置。
【請求項8】
利用者の靴底の接地面の圧力を検出する圧力センサと、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構と、制御部とを備えた動作安定支援装置であって、
上記制御部は、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出手段と、
上記重心位置算出手段により算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定手段と、
上記転倒可能性判定手段により上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御手段と、
を備えたことを特徴とする動作安定支援装置。
【請求項9】
利用者の靴底の接地面の圧力を検出する圧力センサ、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、
上記制御部において実行される、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、
上記重心位置算出ステップにて算出された上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、
上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記安定化機構を制御して上記安定支持板を展開させる制御を行う安定化機構制御ステップと、
を含むことを特徴とする動作安定支援方法。
【請求項10】
請求項9に記載の動作安定支援方法において、
更に、出力部に接続されており、
上記制御部において実行される、
上記転倒可能性判定ステップにて上記側方転倒の可能性が判定された場合に、上記出力部を介して上記利用者に告知する出力制御を行う転倒可能性告知ステップ、
を更に含むことを特徴とする動作安定支援方法。
【請求項11】
請求項9または10に記載の動作安定支援方法において、
上記安定化機構制御ステップは、
上記転倒可能性判定ステップにて判定される上記側方転倒の可能性がなくなった場合に、上記安定化機構を制御して上記安定支持板を収納させる制御を行うこと、
を特徴とする動作安定支援方法。
【請求項12】
靴底の接地面の圧力を検出する圧力センサ、出力部、入力部、および、少なくとも一方の靴の側方に安定支持板を展開可能な安定化機構に接続された、少なくとも制御部を備えた動作安定支援装置において実行される動作安定支援方法であって、
上記制御部において実行される、
上記圧力センサにより検出された上記圧力に基づいて、重心位置を算出する重心位置算出ステップと、
上記重心位置算出ステップにて算出された上記重心位置に基づいて、上記重心位置が支持基底面の外側となるか否かを判定することにより、側方転倒の可能性を判定する転倒可能性判定ステップと、
上記転倒可能性判定ステップにて上記支持基底面の外側となると判定された場合に、上記出力部を介して上記利用者に上記側方転倒の可能性を告知する出力制御を行う転倒可能性告知ステップと、
上記入力部を介して上記利用者により入力があった場合に、上記安定化機構を制御して上記安定支持板を展開または収納させる制御を行う安定化機構制御ステップと、
を含むことを特徴とする動作安定支援方法。
【請求項13】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着される加速度センサに接続されており、
上記制御部において実行される、
上記加速度センサにより検出される加速度を取得する加速度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記加速度取得ステップにて取得された上記加速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【請求項14】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着されるジャイロセンサに接続されており、
上記制御部において実行される、
上記ジャイロセンサにより検出される角速度を取得する角速度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記角速度取得ステップにて取得された上記角速度に基づいて、予測される上記重心位置が上記支持基底面の外側となるか否かを判定することにより、上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【請求項15】
請求項9から12のいずれか一つに記載の動作安定支援方法において、
更に、上記利用者に装着される曲げセンサに接続されており、
上記制御部において実行される、
上記曲げセンサにより検出される曲げ角度を取得する曲げ角度取得ステップ、
を更に含み、
上記転倒可能性判定ステップは、
更に、上記角速度取得ステップにて取得された上記曲げ角度に基づいて、上記利用者の起居動作時の上記側方転倒の可能性を判定すること、
を特徴とする動作安定支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−11136(P2012−11136A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−153338(P2010−153338)
【出願日】平成22年7月5日(2010.7.5)
【出願人】(504136993)独立行政法人国立病院機構 (37)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年7月5日(2010.7.5)
【出願人】(504136993)独立行政法人国立病院機構 (37)
【Fターム(参考)】
[ Back to top ]