
動作支援装置
【課題】要介護者の動作負担が軽い動作支援装置を提供することを課題とする。
【解決手段】動作支援装置1は、搭乗部23と、搭乗部23に対して回動可能な下肢フレーム20と、下肢フレーム20に対して回動可能な上肢フレーム21と、上肢フレーム21に対して回動可能であって要介護者Aの身体の一部を保持する保持部22と、を備え、要介護者Aの起立動作および着座動作のうち少なくとも一方を支援することを特徴とする。要介護者Aは立位のまま、保持部22により保持される。このため、移動する際の要介護者Aの動作負担が軽い。
【解決手段】動作支援装置1は、搭乗部23と、搭乗部23に対して回動可能な下肢フレーム20と、下肢フレーム20に対して回動可能な上肢フレーム21と、上肢フレーム21に対して回動可能であって要介護者Aの身体の一部を保持する保持部22と、を備え、要介護者Aの起立動作および着座動作のうち少なくとも一方を支援することを特徴とする。要介護者Aは立位のまま、保持部22により保持される。このため、移動する際の要介護者Aの動作負担が軽い。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、要介護者の起立動作および着座動作のうち少なくとも一方を支援する動作支援装置に関する。
【背景技術】
【0002】
例えば、特許文献1には、歩行機能障害者の歩行を補助する歩行介助装置が開示されている。同文献記載の歩行介助装置は、保持部と車輪とを備えている。歩行機能障害者は、保持部に両腕を抱えられた状態で、歩行することができる。しかしながら、歩行障害が重度である場合は、同文献記載の歩行介助装置を用いても、歩行機能障害者が歩行できないこともある。この場合は、歩行機能障害者が乗って移動可能な歩行介助装置が必要になる。例えば、特許文献2には、立位の使用者を輸送可能な個人輸送機器が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−184966号公報
【特許文献2】特表2008−513055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に記載の個人輸送機器は、歩行機能障害者用としては使用しにくい。その理由は、歩行障害が重度である場合は、自力で立位を保持するのが困難だからである。ここで、特許文献2に記載の個人輸送機器に椅子を設けることも考えられる。しかしながら、この場合、煩雑な動作を歩行機能障害者に強いることになる。すなわち、例えば、歩行機能障害者がベッドからトイレに移動する際、ベッドから立ち上がり、個人輸送機器の椅子に座り、ベッドからトイレまで個人輸送機器を移動させ、個人輸送機器の椅子から立ち上がり、トイレに座る必要がある。このように、歩行機能障害者は、移動の度に、逐一、起立→着座→起立→着座という一連の動作を行う必要がある。本発明の動作支援装置は、上記課題に鑑みて完成されたものである。本発明は、要介護者の動作負担が軽い動作支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記課題を解決するため、本発明の動作支援装置は、搭乗部と、該搭乗部に対して回動可能な下肢フレームと、該下肢フレームに対して回動可能な上肢フレームと、該上肢フレームに対して回動可能であって要介護者の身体の一部を保持する保持部と、を備え、該要介護者の起立動作および着座動作のうち少なくとも一方を支援することを特徴とする。
【0006】
本発明の動作支援装置は、保持部を備えている。保持部は、起立動作および着座動作のうち、少なくとも一方を支援することができる。保持部が起立動作を支援する場合は、要介護者が動作支援装置に乗る際の動作を補助することができる。保持部が着座動作を支援する場合は、要介護者が動作支援装置から降りる際の動作を補助することができる。
【0007】
(2)好ましくは、上記(1)の構成において、さらに、三つの関節部を備え、三つの該関節部のうち、第一の該関節部は、前記搭乗部と前記下肢フレームとを相対的に回動可能に連結し、三つの該関節部のうち、第二の該関節部は、該下肢フレームと前記上肢フレームとを相対的に回動可能に連結し、三つの該関節部のうち、第三の該関節部は、該上肢フレームと前記保持部とを相対的に回動可能に連結する構成とする方がよい。本構成によると、要介護者の体格(例えば、大人、子供、男性、女性、太め、細めなど)や姿勢などに応じて、保持部を動かすことができる。
【0008】
(3)好ましくは、上記(2)の構成において、さらに、前記関節部の動作を制御する制御部を備え、前記要介護者の起立動作および着座動作のうち少なくとも一方を支援する際、該制御部は、該要介護者の動きに応じて前記関節部を動かし前記保持部を移動させる構成とする方がよい。本構成によると、要介護者の動きに保持部の動きを追随させることができる。このため、要介護者の動きを保持部により補助することができる。
【0009】
(4)好ましくは、上記(3)の構成において、さらに、前記要介護者を検知可能な視覚センサを備え、該要介護者の起立動作を支援する際、前記制御部は、該視覚センサの画像情報を基に、前記保持部を該要介護者に近接させる構成とする方がよい。本構成によると、保持部が要介護者にアプローチする際、視覚センサの画像情報が用いられる。このため、要介護者の適切な部位に、保持部を近接させることができる。すなわち、要介護者の適切な部位を保持して、起立動作を支援することができる。
【0010】
(5)好ましくは、上記(1)ないし(4)のいずれかの構成において、前記保持部は、空気圧を調整することにより拡縮可能なエアバッグを有する構成とする方がよい。本構成によると、保持部の弾力を調整することができる。
【0011】
(6)好ましくは、上記(1)ないし(5)のいずれかの構成において、前記要介護者の起立動作を支援する際、該要介護者は前記搭乗部に足裏を載せ、さらに、該搭乗部における荷重分布を検知可能な荷重分布センサを備える構成とする方がよい。本構成によると、搭乗部の荷重分布から、要介護者の重心移動を認識することができる。このため、起立支援の際、動作支援装置が倒れるのを抑制することができる。
【0012】
(7)好ましくは、上記(1)ないし(6)のいずれかの構成において、さらに、前記要介護者の起立動作を支援する際、該要介護者の姿勢の変化に応じて、該要介護者の膝頭を膝裏方向に押圧する膝保持部を備える構成とする方がよい。本構成によると、要介護者が立ち上がりやすくなる。
【発明の効果】
【0013】
本発明によると、要介護者の動作負担が軽い動作支援装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の動作支援装置の一実施形態である歩行介助装置の前方から見た斜視図である。
【図2】同歩行介助装置の後方から見た斜視図である。
【図3】同歩行介助装置の右側面図である。
【図4】同歩行介助装置の収納状態の右側面図である。
【図5】同歩行介助装置の保持部の上面図である。
【図6】同歩行介助装置のブロック図である。
【図7】同歩行介助装置の呼出しステップにおける模式図である。
【図8】後方CCDカメラの画像の模式図である。
【図9】同歩行介助装置の保持動作ステップにおける模式図である。
【図10】同歩行介助装置の起立動作ステップにおける模式図(その1)である。
【図11】同歩行介助装置の起立動作ステップにおける模式図(その2)である。
【図12】同歩行介助装置の起立動作ステップにおける模式図(その3)である。
【図13】(a)〜(d)は身長の高い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す模式図である。(e)〜(h)は身長の低い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す模式図である。
【図14】歩行モードにおける同歩行介助装置の右側面図である。
【図15】着座モードにおける同歩行介助装置の右側面図である。
【発明を実施するための形態】
【0015】
以下、本発明の動作支援装置の一実施形態である歩行介助装置の実施の形態について説明する。
【0016】
<歩行介助装置の機械的構成>
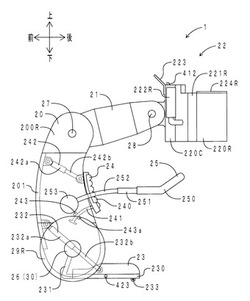
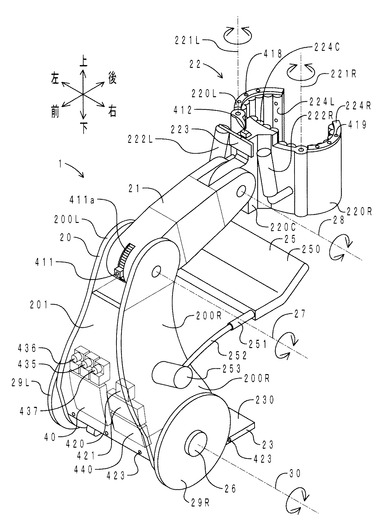
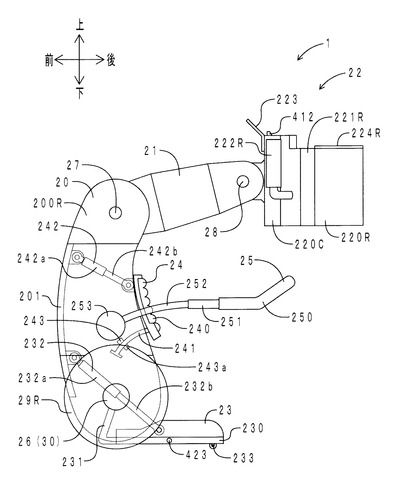
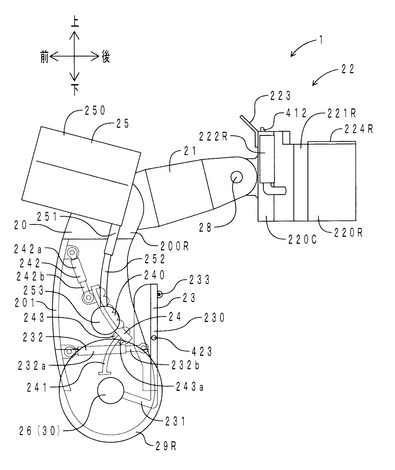
まず、本実施形態の歩行介助装置の機械的構成について説明する。図1に、本実施形態の歩行介助装置の前方から見た斜視図を示す。図2に、同歩行介助装置の後方から見た斜視図を示す。図3に、同歩行介助装置の右側面図を示す。図4に、同歩行介助装置の収納状態の右側面図を示す。なお、図1においてはフロントパネル201およびサイドパネル200Rの一部を、図2においてはヒップボード25の一部を、図3および図4においてはサイドパネル200Rおよび駆動輪29Rを、それぞれ透過して示す。また、図3、図4においては、フロントパネル201の後面に配置されている部材を、適宜省略して示す。
【0017】
図1〜図4に示すように、歩行介助装置1は、下肢フレーム20と、上肢フレーム21と、保持部22と、フットボード23と、ニーサポート24と、ヒップボード25と、一対の駆動軸26と、上肢フレーム用揺動軸27と、保持部用揺動軸28と、一対の駆動輪29L、29Rと、一対の下肢フレーム用揺動軸30と、を備えている。
【0018】
下肢フレーム用揺動軸30、上肢フレーム用揺動軸27、保持部用揺動軸28は、各々、本発明の関節部に含まれる。フットボード23は、本発明の搭乗部に含まれる。ニーサポート24は、本発明の膝保持部に含まれる。
【0019】
(下肢フレーム20、下肢フレーム用揺動軸30)
下肢フレーム20は、一対のサイドパネル200L、200Rと、フロントパネル201と、を備えている。一対のサイドパネル200L、200Rは、各々、上下方向に延びる板状を呈している。一対のサイドパネル200L、200Rは、左右方向に対向して配置されている。一対のサイドパネル200L、200R間の間隔は、下方から上方に向かって狭まっている。フロントパネル201は、下方から上方に向かって尖る台形状を呈している。フロントパネル201は、一対のサイドパネル200L、200Rの前縁間に配置されている。
【0020】
左右一対の下肢フレーム用揺動軸30は、下肢フレーム20の下端とフットボード23の前端とを連結している。一方の下肢フレーム用揺動軸30は、サイドパネル200Lの下端内面に固定されている。他方の下肢フレーム用揺動軸30は、サイドパネル200Rの下端内面に固定されている。二つの下肢フレーム用揺動軸30は、下肢フレーム用モータ(図略)により、フットボード23に対して回動可能である。
【0021】
(駆動軸26、駆動輪29L、29R)
駆動軸26は、二つ配置されている。一方の駆動軸26は、サイドパネル200Lの下端外面に配置されている。他方の駆動軸26はサイドパネル200Rの下端外面に配置されている。二つの駆動軸26は、各々、駆動輪用モータ(図略)により、互いに独立して回動可能である。駆動輪29Lは、左方の駆動軸26に固定されている。駆動輪29Rは、右方の駆動軸26に固定されている。このため、駆動輪29L、29Rは、互いに独立して回動可能である。駆動軸26は、下肢フレーム用揺動軸30と、略同軸上に配置されている。
【0022】
(フットボード23)
フットボード23は、ボード本体230と、左右一対のアーム231と、フットボード用エアシリンダ232と、従動輪233と、を備えている。ボード本体230は、長方形板状を呈している。従動輪233は、ボード本体230の下面の後縁付近に配置されている。
【0023】
アーム231は、L字状を呈している。左側のアーム231の一端は、左側の下肢フレーム用揺動軸30に環装されている。左側のアーム231の他端は、ボード本体230の左前隅に固定されている。右側のアーム231の一端は、右側の下肢フレーム用揺動軸30に環装されている。右側のアーム231の他端は、ボード本体230の右前隅に固定されている。アーム231は、下肢フレーム用揺動軸30に対して、独立して回動可能である。
【0024】
フットボード用エアシリンダ232は、シリンダ本体232aと、ピストン232bと、を備えている。シリンダ本体232aの一端は、フロントパネル201の後面に、揺動可能に取り付けられている。ピストン232bの一端は、シリンダ本体232aの他端に対して、出入り可能である。ピストン232bの他端は、ボード本体230の上面に、揺動可能に取り付けられている。シリンダ本体232aにピストン232bを出し入れすることにより、ボード本体230を揺動させることができる。
【0025】
(ニーサポート24)
ニーサポート24は、サポート本体240と、左右一対の被ガイドレール241と、ニーサポート用エアシリンダ242と、左右一対のガイドブロック243と、を備えている。サポート本体240は、長方形板状を呈している。サポート本体240の後面には、クッションが配置されている。
【0026】
左側のガイドブロック243は、左側のサイドパネル200Lの右面に配置されている。右側のガイドブロック243は、右側のサイドパネル200Rの左面に配置されている。ガイドブロック243は、一対のブロック片243aを備えている。一対のブロック片243aは、上下方向に所定間隔だけ離間して配置されている。
【0027】
左右一対の被ガイドレール241は、弧状を呈している。左右一対の被ガイドレール241は、サポート本体240の前面の左右両縁付近から、前方に突設されている。左側の被ガイドレール241は、左側のガイドブロック243の一対のブロック片243a間を、弧状に摺動可能である。右側の被ガイドレール241は、右側のガイドブロック243の一対のブロック片243a間を、弧状に摺動可能である。
【0028】
ニーサポート用エアシリンダ242は、シリンダ本体242aと、ピストン242bと、を備えている。シリンダ本体242aの一端は、フロントパネル201の後面上縁付近に、揺動可能に取り付けられている。ピストン242bの一端は、シリンダ本体242aの他端に対して、出入り可能である。ピストン242bの他端は、サポート本体240の前面上縁付近に、揺動可能に取り付けられている。シリンダ本体242aにピストン242bを出し入れすると、ガイドブロック243に対して被ガイドレール241が摺動する。このため、下肢フレーム20に対して、サポート本体240を弧状に動かすことができる。
【0029】
(ヒップボード25)
ヒップボード25は、ボード本体250と、パイプ251と、シャフト252と、ヒップボード用揺動軸253と、を備えている。ヒップボード用揺動軸253は、サイドパネル200Rの右面から突設されている。シャフト252は、ヒップボード用揺動軸253の外周面から突設されている。パイプ251は、シャフト252の先端に配置されている。シャフト252は、パイプ251に対して、出入り可能である。パイプ251は、シャフト252に対して、回動可能である。ボード本体250は、長方形板状を呈している。パイプ251は、ボード本体250の右前隅に固定されている。
【0030】
ヒップボード用揺動軸253を回動させることにより、ヒップボード25全体を揺動させることができる。シャフト252に対してパイプ251を回動させることにより、シャフト252に対してボード本体250を揺動させることができる。パイプ251に対してシャフト252を出入りさせることにより、ヒップボード用揺動軸253に対してボード本体250を離間あるいは近接させることができる。
【0031】
(上肢フレーム用揺動軸27、上肢フレーム21)
上肢フレーム用揺動軸27は、下肢フレーム20の上端と上肢フレーム21の下端とを連結している。上肢フレーム用揺動軸27は、上肢フレーム用モータ(図略)により、下肢フレーム20に対して回動可能である。上肢フレーム21は、直方体箱状を呈している。上肢フレーム21は、上肢フレーム用揺動軸27に固定されている。上肢フレーム用揺動軸27を回動させることにより、下肢フレーム20に対して、上肢フレーム21を揺動させることができる。上肢フレーム21の下端には、溝部が形成されている。溝部からは、カメラ用ホイール411aが表出している。カメラ用ホイール411aは、上肢フレーム用揺動軸27に対して、独立して回動可能である。
【0032】
(保持部用揺動軸28、保持部22)
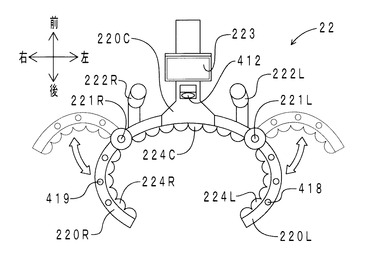
保持部用揺動軸28は、上肢フレーム21の後端と保持部22の前端とを連結している。保持部用揺動軸28は、保持部用モータ(図略)により、上肢フレーム21に対して回動可能である。図5に、本実施形態の歩行介助装置の保持部の上面図を示す。図5に示すように、保持部22は、中央部220Cと、左翼部220Lと、右翼部220Rと、左翼部用揺動軸221Lと、右翼部用揺動軸221Rと、左右一対のグリップ222L、222Rと、ディスプレイ223と、を備えている。
【0033】
中央部220Cは、上方から見て、T字板状を呈している。中央部220Cの前端は、保持部用揺動軸28に固定されている。中央部220Cの後面には、中央エアバッグ224Cが配置されている。左右一対のグリップ222L、222Rは、中央部220Cの前面に配置されている。左右一対のグリップ222L、222Rは、駆動輪29L、29Rの操作のために用いられる。ディスプレイ223は、中央部220Cの上方に配置されている。ディスプレイ223には、歩行介助装置1の速度、走行ルートなどが表示される。また、ディスプレイ223のタッチパネル部を介して、要介護者は、各種コマンド、データなどを入力することができる。
【0034】
左翼部用揺動軸221Lは、中央部220Cの左端と左翼部220Lの前端とを連結している。左翼部用揺動軸221Lは、左翼部用モータ(図略)により、中央部220Cに対して回動可能である。左翼部220Lは、弧板状を呈している。左翼部220Lは、左翼部用揺動軸221Lに固定されている。図5に細線で示すように、左翼部用揺動軸221Lを回動させることにより、中央部220Cに対して、左翼部220Lを揺動させることができる。左翼部220Lの右面および上面には、左方エアバッグ224Lが配置されている。
【0035】
右翼部用揺動軸221R、右翼部220Rは、左翼部用揺動軸221L、左翼部220Lと、同様の構成を備えている。また、右翼部用揺動軸221R、右翼部220Rは、中央部220Cを挟んで、左翼部用揺動軸221L、左翼部220Lに対して、左右対称に配置されている。このため、説明を割愛する。
【0036】
中央部220C(中央エアバッグ224C)、左翼部220L(左方エアバッグ224L)、右翼部220R(右方エアバッグ224R)は、全体としてC字状に連なっている。左翼部用揺動軸221L、右翼部用揺動軸221Rを回動させることにより、C字開口幅を変更することができる。
【0037】
<歩行介助装置の電気的構成>
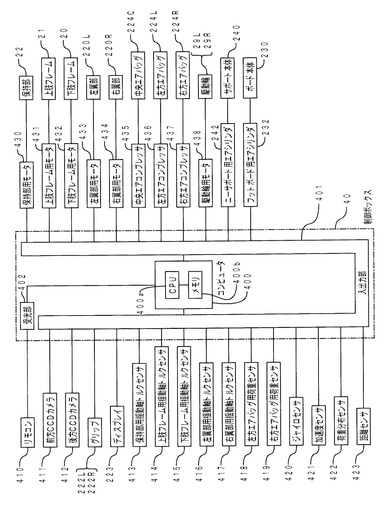
次に、本実施形態の歩行介助装置の電気的構成について説明する。図6に、本実施形態の歩行介助装置のブロック図を示す。図1〜図6に示すように、歩行介助装置1は、制御ボックス40と、リモコン410と、各種センサ(前方CCD(Charge−Coupled Device)カメラ411、後方CCDカメラ412、保持部用揺動軸トルクセンサ413、上肢フレーム用揺動軸トルクセンサ414、下肢フレーム用揺動軸トルクセンサ415、左翼部用揺動軸トルクセンサ416、右翼部用揺動軸トルクセンサ417、左方エアバッグ用荷重センサ418、右方エアバッグ用荷重センサ419、ジャイロセンサ420、加速度センサ421、荷重分布センサ422、八つの距離センサ423)と、各種アクチュエータ(保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434、中央エアコンプレッサ435、左方エアコンプレッサ436、右方エアコンプレッサ437、二つの駆動輪用モータ438)と、バッテリ440と、を備えている。制御ボックス40は、本発明の制御部に含まれる。後方CCDカメラ412は、本発明の視覚センサに含まれる。
【0038】
制御ボックス40は、コンピュータ400と、入出力部401と、受光部402と、を備えている。コンピュータ400は、CPU(Central Processing Unit)400aと、メモリ400bと、を備えている。上記各種センサおよび各種アクチュエータは、入出力部401に電気的に接続されている。各種アクチュエータと入出力部401との間には、各々、駆動回路(図略)が介装されている。また、リモコン410は、受光部402に、所定の信号を伝送可能である。また、前記グリップ222L、222R、ディスプレイ223、ニーサポート用エアシリンダ242、フットボード用エアシリンダ232も、入出力部401に電気的に接続されている。
【0039】
制御ボックス40は、フロントパネル201の後面に配置されている。コンピュータ400のメモリ400bには、複数の要介護者の身体データ(身長、体重、胸囲、座高、足の膝上部の長さ、足の膝下部の長さなど)が格納されている。また、メモリ400bには、起立動作支援プログラム、着座動作支援プログラムなどが格納されている。すなわち、要介護者が起立動作あるいは着座動作を行う際の保持部22、ニーサポート24の軌跡、速度、各種揺動軸のトルクなどが、各要介護者ごとに格納されている。リモコン410は、歩行介助装置1とは別体である。リモコン410は、要介護者が歩行介助装置1を遠隔操作する際に用いられる。前方CCDカメラ411は、上肢フレーム21下端のカメラ用ホイール411aに固定されている。上肢フレーム21が揺動し角度が変わっても、前方CCDカメラ411を前方に向けることができる。前方CCDカメラ411は、前方確認のために用いられる。後方CCDカメラ412は、ディスプレイ223の後方に配置されている。後方CCDカメラ412は、後方確認および要介護者の表情確認のために用いられる。
【0040】
保持部用揺動軸トルクセンサ413は保持部用揺動軸28に、上肢フレーム用揺動軸トルクセンサ414は上肢フレーム用揺動軸27に、下肢フレーム用揺動軸トルクセンサ415は下肢フレーム用揺動軸30に、左翼部用揺動軸トルクセンサ416は左翼部用揺動軸221Lに、右翼部用揺動軸トルクセンサ417は右翼部用揺動軸221Rに、それぞれ配置されている。これら各種トルクセンサは、各種揺動軸のトルクを、それぞれ検知するために用いられる。
【0041】
左方エアバッグ用荷重センサ418は左方エアバッグ224Lに、右方エアバッグ用荷重センサ419は右方エアバッグ224Rに、それぞれ配置されている。これら荷重センサは、各々、対応するエアバッグが要介護者から受ける荷重を検知するために用いられる。
【0042】
ジャイロセンサ420は、フロントパネル201の後面に配置されている。ジャイロセンサ420は、歩行介助装置1の傾斜を検知するために用いられる。加速度センサ421は、フロントパネル201の後面に配置されている。加速度センサ421は、歩行介助装置1の加速度を検知するために用いられる。
【0043】
荷重分布センサ422は、フットボード23のボード本体230に配置されている。荷重分布センサ422は、フットボード23のボード本体230における、要介護者の重心を検知するために用いられる。距離センサ423は、ボード本体230の後縁に三つ、左右両縁に一つずつ、フロントパネル201の前面下縁に三つ、配置されている。距離センサ423は、歩行介助装置1と隣接物との間の距離を検知するために用いられる。
【0044】
保持部用モータ430は保持部用揺動軸28に、上肢フレーム用モータ431は上肢フレーム用揺動軸27に、下肢フレーム用モータ432は下肢フレーム用揺動軸30に、左翼部用モータ433は左翼部用揺動軸221Lに、右翼部用モータ434は右翼部用揺動軸221Rに、それぞれ連結されている。これら各種モータは、各種揺動軸を、それぞれ回動させるために用いられる。
【0045】
中央エアコンプレッサ435、左方エアコンプレッサ436、右方エアコンプレッサ437は、フロントパネル201の後面に配置されている。各種エアコンプレッサには、各々、空気圧センサが配置されている。中央エアコンプレッサ435は中央エアバッグ224Cの空気圧を、左方エアコンプレッサ436は左方エアバッグ224Lの空気圧を、右方エアコンプレッサ437は右方エアバッグ224Rの空気圧を、それぞれ調整するために用いられる。二つの駆動輪用モータ438は、駆動軸26に連結されている。二つの駆動輪用モータ438は、各々、駆動輪29L、29Rを回動させるために用いられる。
【0046】
<歩行介助装置の動作>
次に、本実施形態の歩行介助装置の動きについて説明する。
【0047】
(起立動作支援)
まず、本実施形態の歩行介助装置の起立動作支援時の動きについて説明する。起立動作支援時の動きは、呼出しステップと、自走ステップと、保持準備ステップと、保持動作ステップと、起立動作ステップと、を有している。
【0048】
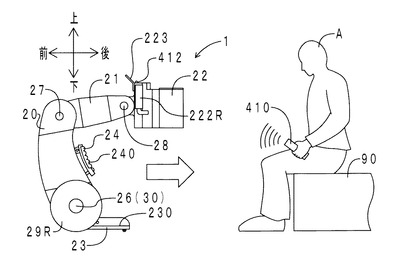
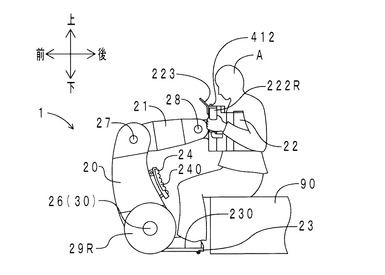
呼出しステップにおいては、要介護者が歩行介助装置1を呼び出す。図7に、本実施形態の歩行介助装置の呼出しステップにおける模式図を示す。なお、ヒップボード25は省略して示す。図7に示すように、要介護者Aは、ベッド90に腰掛けている。要介護者Aがリモコン410の「呼出しボタン」を押すと、受光部402を介してコンピュータ400に、歩行介助装置1を呼び出す命令が伝送される。
【0049】
自走ステップにおいては、歩行介助装置1が自走し、要介護者Aの近くまで移動する。要介護者Aからの呼出しを受け、CPU400aは、駆動輪用モータ438を駆動し、駆動輪29L、29Rを回動させる。すなわち、歩行介助装置1を走行させる。この際、前方CCDカメラ411、後方CCDカメラ412、八つの距離センサ423により、周囲の安全を確認する。障害物が走行ルート上にあるとCPU400aが判断した場合、CPU400aは駆動輪用モータ438を適切に駆動し当該障害物を迂回する。ジャイロセンサ420は、走行時における歩行介助装置1のバランスをとる。歩行介助装置1は、要介護者Aの前方の所定位置で停止する。
【0050】
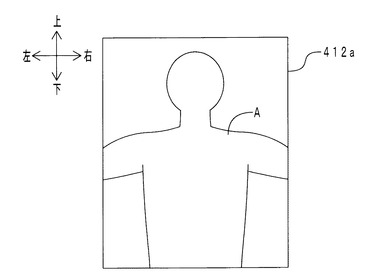
保持準備ステップにおいては、要介護者Aを保持する準備を行う。図8に、後方CCDカメラの画像の模式図を示す。図8に示すように、CPU400aには、後方CCDカメラ412の画像412aが伝送される。まず、CPU400aは、画像412aとメモリ400bに格納された身体データとを比較し、複数の要介護者の中から、今回呼び出した要介護者Aが誰であるかを判別する。次に、CPU400aは、歩行介助装置1を微速後進させる。CPU400aは、後方の距離センサ423からの信号により、ボード本体230が要介護者Aのつま先の直前に来たと判断した位置で、歩行介助装置1を停止させる。続いて、CPU400aは、ジャイロセンサ420からの信号により、フットボード用エアシリンダ232を駆動する。そして、フットボード23のボード本体230を、略水平状態にする。それから、要介護者Aは、ボード本体230に両足を載せる。荷重分布センサ422は、要介護者Aの両足裏の荷重分布を検知する。CPU400aは、当該荷重分布から要介護者Aがボード本体230に両足を載せたことを認識する。
【0051】
保持動作ステップにおいては、保持部22により要介護者Aの胴部を保持する。CPU400aは、要介護者Aの身体データ、姿勢に応じて、保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434を駆動する。すなわち、歩行介助装置1を、要介護者Aの身体データ、姿勢に応じて、変形させる。
【0052】
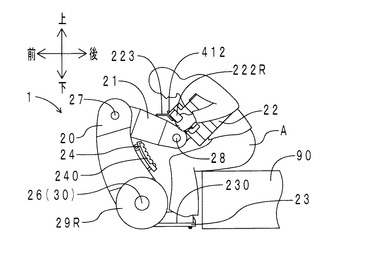
図9に、本実施形態の歩行介助装置の保持動作ステップにおける模式図を示す。なお、ヒップボード25は省略して示す。図9に示すように、保持部22は、要介護者Aの胴部を、三方(前方、左方、右方)から保持する。すなわち、中央エアバッグ224Cが要介護者Aの胸部に弾接した状態で、CPU400aは、左翼部220Lおよび右翼部220Rを、要介護者Aを挟み込む方向に揺動させる。左方エアバッグ用荷重センサ418および右方エアバッグ用荷重センサ419の荷重が所定値に到達したところで、CPU400aは、左翼部220Lおよび右翼部220Rの揺動を停止する。
【0053】
保持動作ステップにおいては、保持部用揺動軸トルクセンサ413により保持部用揺動軸28のトルクを、上肢フレーム用揺動軸トルクセンサ414により上肢フレーム用揺動軸27のトルクを、下肢フレーム用揺動軸トルクセンサ415により下肢フレーム用揺動軸30のトルクを、左翼部用揺動軸トルクセンサ416により左翼部用揺動軸221Lのトルクを、右翼部用揺動軸トルクセンサ417により右翼部用揺動軸221Rのトルクを、それぞれ継続的に監視する。
【0054】
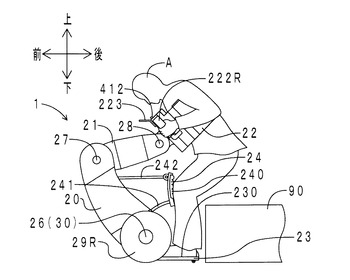
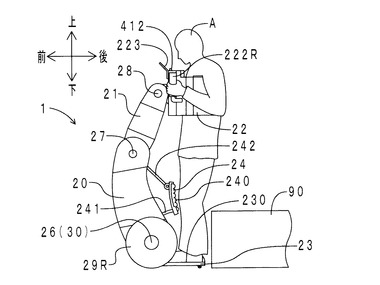
起立動作ステップにおいては、要介護者Aがベッド90から立ち上がるのを補助する。図10に、本実施形態の歩行介助装置の起立動作ステップにおける模式図(その1)を示す。図11に、同歩行介助装置の起立動作ステップにおける模式図(その2)を示す。図12に、同歩行介助装置の起立動作ステップにおける模式図(その3)を示す。なお、ヒップボード25は省略して示す。
【0055】
図10に示すように、起立動作ステップの前段においては、メモリ400bの起立動作支援プログラムに従って、CPU400aは、保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434を適宜駆動し、所定の軌跡で保持部22を動かす。このため、保持部22に保持されたまま、要介護者Aの胴部も略同じ軌跡で移動する。したがって、要介護者Aは、胴部の移動に応じて、ベッド90から立ち上がる。
【0056】
図11に示すように、起立動作ステップの後段においては、要介護者Aは膝を伸ばす必要がある。この際、CPU400aは、メモリ400bの起立動作支援プログラムに従って、ニーサポート用エアシリンダ242を駆動する。すなわち、サポート本体240を後方に移動させ、要介護者Aの膝頭を後方(膝裏方向)に押圧する。このため、図12に示すように、要介護者Aは、簡単に膝を伸ばすことができる。
【0057】
このようにして、要介護者Aは、ボード本体230上に起立することができる。要介護者Aの両脇は、保持部22により引き続き保持されている。なお、起立動作ステップにおいても、保持動作ステップ同様に、各種トルクセンサにより、各種揺動軸のトルクを継続的に監視する。また、荷重分布センサ422から得られる要介護者Aの荷重分布の変化から、重心移動を監視する。また、ジャイロセンサ420により、要介護者Aの重心が移動しても歩行介助装置1が倒れないように、バランスをとる。また、各種トルクセンサ、各種荷重センサ、荷重分布センサ422、ジャイロセンサ420の信号から、要介護者Aの動作と保持部22の動作とが同期していないとCPU400aが判断した場合は、要介護者Aの動作に保持部22の動作を同期させる。また、後方CCDカメラ412の画像から要介護者Aの表情変化を監視し、要介護者Aが苦痛を受けているとCPU400aが判断した場合は、非常停止する。なお、CPU400aは、要介護者Aの顔面の特徴点(例えば、目、眉、鼻、口角など)の変位量から、要介護者Aの表情変化を判断する。
【0058】
(移動支援)
続いて、本実施形態の歩行介助装置の移動支援時の動きについて説明する。移動支援時においては、ちょうど保持部22に要介護者Aがおぶさるような姿勢のまま(ただし足裏はボード本体230に載っている)、要介護者Aが歩行介助装置1を前進させる。具体的には、要介護者Aは、グリップ222L、222Rを介して駆動輪29L、29Rを操作し、歩行介助装置1の速度、進行方向を調整する。この際、前方CCDカメラ411、後方CCDカメラ412、八つの距離センサ423により、周囲の安全を確認する。要介護者Aは、歩行介助装置1を、着座予定位置(例えば、椅子、便座など)の直近で停止させる。
【0059】
移動支援ステップにおいても、起立動作ステップ同様に、各種トルクセンサにより、各種揺動軸のトルクを継続的に監視する。また、荷重分布センサ422から得られる要介護者Aの荷重分布の変化から、重心移動を監視する。また、ジャイロセンサ420により、歩行介助装置1のバランスをとる。また、後方CCDカメラ412の画像から、要介護者Aの表情変化を監視し、要介護者Aが苦痛を受けているとCPU400aが判断した場合は、非常停止する。
【0060】
(着座動作支援)
続いて、本実施形態の歩行介助装置の着座動作支援時の動きについて説明する。着座動作支援時においては、まず、前方CCDカメラ411により、CPU400aが着座予定位置を認識する。次いで、CPU400aからの指示により、歩行介助装置1は、着座予定位置に要介護者Aの背中が正対するように、移動する。続いて、歩行介助装置1は、上記起立動作支援時の動きと逆の動き(つまり、図12→図11→図10→図9という順序の動き)を行うことにより、要介護者Aが着座予定位置に着座するのを補助する。
【0061】
<作用効果>
次に、本実施形態の歩行介助装置1の作用効果について説明する。本実施形態の歩行介助装置1は、保持部22を備えている。保持部22は、要介護者Aを立位で保持することができる。このため、要介護者Aは、移動の際、一回起立するだけで済む。したがって、要介護者Aの動作負担が軽い。また、要介護者Aは立位のまま移動することができる。このため、健常者と同様の高さの目線を確保した状態で、移動することができる。また、保持部22は、前方から要介護者Aを保持することができる。このため、要介護者Aは、あたかも保持部22におぶさるような姿勢のまま移動することができる。すなわち、立位であるにもかかわらず、要介護者Aは、楽な姿勢で移動することができる。また、保持部22は、要介護者Aの起立動作および着座動作を支援することができる。
【0062】
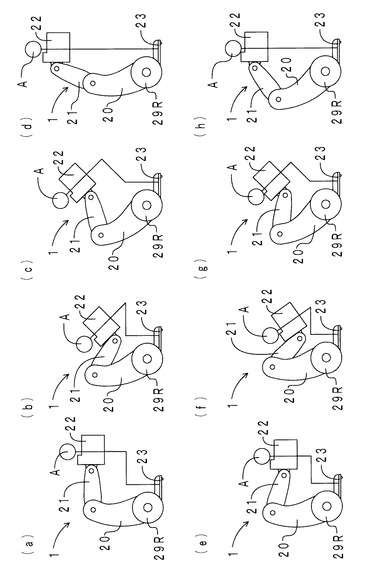
また、本実施形態の歩行介助装置1は、三つの揺動軸(保持部用揺動軸28、上肢フレーム用揺動軸27、下肢フレーム用揺動軸30)を備えている。このため、要介護者Aの体格(例えば、大人、子供、男性、女性、太め、細めなど)や姿勢などに応じて、保持部22を動かすことができる。図13(a)〜(d)に、身長の高い要介護者の起立動作を支援する際の本実施形態の歩行介助装置の動きを示す。図13(e)〜(h)に、身長の低い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す。なお、ニーサポート24、ヒップボード25は省略して示す。図13に示すように、要介護者Aの身長が高い場合と低い場合とでは、下肢フレーム20、上肢フレーム21、保持部22の動きが異なる。このように、本実施形態の歩行介助装置1によると、要介護者Aの体格や姿勢などに応じて、保持部22の高さや角度などを調整することができる。また、本実施形態の歩行介助装置1によると、三つの揺動軸を適切に制御することにより、要介護者Aの胴部の動きに、保持部22の動きを追随させることができる。
【0063】
また、本実施形態の歩行介助装置1によると、保持部22が要介護者Aの脇の下にアプローチする際、後方CCDカメラ412の画像情報が用いられる。このため、要介護者Aの脇の下に、確実に保持部22を当接させることができる。また、本実施形態の歩行介助装置1によると、中央エアバッグ224C、左方エアバッグ224L、右方エアバッグ224Rの空気圧を調整することにより、要介護者Aが保持部22から受ける弾力を、調整することができる。
【0064】
また、本実施形態の歩行介助装置1によると、荷重分布センサ422により、ボード本体230の荷重分布を検出することができる。このため、要介護者Aの重心移動を認識することができる。したがって、起立支援の際、歩行介助装置1が倒れるのを抑制することができる。また、本実施形態の歩行介助装置1によると、ニーサポート24により、要介護者Aの起立動作を支援する際、要介護者Aの膝頭を膝裏方向に押圧することができる。このため、要介護者Aが膝を伸ばしやすくなる。
【0065】
また、本実施形態の歩行介助装置1によると、中央エアバッグ224C、左方エアバッグ224L、右方エアバッグ224Rが個別に配置されている。このため、各種エアバッグの空気圧に、差を設けることができる。例えば、要介護者Aの胴部が上昇する場合は、左方エアバッグ224Lおよび右方エアバッグ224Rの空気圧を中央エアバッグ224Cの空気圧よりも高く設定することにより、要介護者Aの両脇を下方からしっかりと支持することができる。また、要介護者Aの胴部が前方に移動する場合は、中央エアバッグ224Cの空気圧を左方エアバッグ224Lおよび右方エアバッグ224Rの空気圧よりも高く設定することにより、要介護者Aの胸部を前方からしっかりと支持することができる。
【0066】
また、本実施形態の歩行介助装置1は、歩行モード、着座モードに切り替えることも可能である。図14に、歩行モードにおける本実施形態の歩行介助装置の右側面図を示す。図15に、着座モードにおける同歩行介助装置の右側面図を示す。図14に示すように、歩行モードにおいては、フットボード23が折り畳まれている。要介護者Aは、保持部22により胴部を保持された状態で、歩行訓練を行うことができる。図15に示すように、着座モードにおいては、ヒップボード25が後方に展開されている。要介護者Aは、ヒップボード25に座った状態で、移動することができる。
【0067】
<その他>
以上、本発明の動作支援装置の実施の形態について説明した。しかしながら、実施の形態は上記形態に特に限定されるものではない。当業者が行いうる種々の変形的形態、改良的形態で実施することも可能である。
【0068】
例えば、ニーサポート24、ヒップボード25は配置しなくてもよい。また、駆動輪29L、29Rは、例えば、無限軌道、脚、蛇行可能な多節体などでもよい。また、各種トルクセンサとして、例えば、シャント抵抗式、ホールモジュール式のトルクセンサを用いてもよい。また、各種CCDカメラの代わりに、例えば、CMOS(Complementary Metal−Oxide Semiconductor)カメラ、赤外カメラなどを用いてもよい。また、各種荷重センサとして、例えば、歪みゲージ式の荷重センサを用いてもよい。また、加速度センサ421として、例えば、機械式、光学式、半導体式の加速度センサを用いてもよい。また、荷重分布センサ422として、例えば、感圧素子を複数有する感圧フィルムセンサを用いてもよい。また、ボード本体230に荷重センサを複数配置することにより、重心管理を行ってもよい。また、距離センサ423として、例えば、超音波式、レーザ式の距離センサを用いてもよい。また、各種モータの代わりに、油圧シリンダ、エアシリンダ、人工筋肉など他のアクチュエータを用いてもよい。同様に、各種エアシリンダの代わりに、油圧シリンダ、モータ、人工筋肉など他のアクチュエータを用いてもよい。
【符号の説明】
【0069】
1:歩行介助装置(動作支援装置)。
20:下肢フレーム、21:上肢フレーム、22:保持部、23:フットボード(搭乗部)、24:ニーサポート(膝保持部)、25:ヒップボード、26:駆動軸、27:上肢フレーム用揺動軸(関節部)、28:保持部用揺動軸(関節部)、29L:駆動輪、29R:駆動輪、30:下肢フレーム用揺動軸(関節部)、40:制御ボックス(制御部)、90:ベッド。
200L:サイドパネル、200R:サイドパネル、201:フロントパネル、220C:中央部、220L:左翼部、220R:右翼部、221L:左翼部用揺動軸、221R:右翼部用揺動軸、222L:グリップ、222R:グリップ、223:ディスプレイ、224C:中央エアバッグ、224L:左方エアバッグ、224R:右方エアバッグ、230:ボード本体、231:アーム、232:フットボード用エアシリンダ、232a:シリンダ本体、232b:ピストン、233:従動輪、240:サポート本体、241:被ガイドレール、242:ニーサポート用エアシリンダ、242a:シリンダ本体、242b:ピストン、243:ガイドブロック、243a:ブロック片、250:ボード本体、251:パイプ、252:シャフト、253:ヒップボード用揺動軸、400:コンピュータ、400a:CPU、400b:メモリ、401:入出力部、402:受光部、410:リモコン、411:前方CCDカメラ、411a:カメラ用ホイール、412:後方CCDカメラ(視覚センサ)、412a:画像、413:保持部用揺動軸トルクセンサ、414:上肢フレーム用揺動軸トルクセンサ、415:下肢フレーム用揺動軸トルクセンサ、416:左翼部用揺動軸トルクセンサ、417:右翼部用揺動軸トルクセンサ、418:左方エアバッグ用荷重センサ、419:右方エアバッグ用荷重センサ、420:ジャイロセンサ、421:加速度センサ、422:荷重分布センサ、423:距離センサ、430:保持部用モータ、431:上肢フレーム用モータ、432:下肢フレーム用モータ、433:左翼部用モータ、434:右翼部用モータ、435:中央エアコンプレッサ、436:左方エアコンプレッサ、437:右方エアコンプレッサ、438:駆動輪用モータ、440:バッテリ。
A:要介護者。
【技術分野】
【0001】
本発明は、要介護者の起立動作および着座動作のうち少なくとも一方を支援する動作支援装置に関する。
【背景技術】
【0002】
例えば、特許文献1には、歩行機能障害者の歩行を補助する歩行介助装置が開示されている。同文献記載の歩行介助装置は、保持部と車輪とを備えている。歩行機能障害者は、保持部に両腕を抱えられた状態で、歩行することができる。しかしながら、歩行障害が重度である場合は、同文献記載の歩行介助装置を用いても、歩行機能障害者が歩行できないこともある。この場合は、歩行機能障害者が乗って移動可能な歩行介助装置が必要になる。例えば、特許文献2には、立位の使用者を輸送可能な個人輸送機器が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−184966号公報
【特許文献2】特表2008−513055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2に記載の個人輸送機器は、歩行機能障害者用としては使用しにくい。その理由は、歩行障害が重度である場合は、自力で立位を保持するのが困難だからである。ここで、特許文献2に記載の個人輸送機器に椅子を設けることも考えられる。しかしながら、この場合、煩雑な動作を歩行機能障害者に強いることになる。すなわち、例えば、歩行機能障害者がベッドからトイレに移動する際、ベッドから立ち上がり、個人輸送機器の椅子に座り、ベッドからトイレまで個人輸送機器を移動させ、個人輸送機器の椅子から立ち上がり、トイレに座る必要がある。このように、歩行機能障害者は、移動の度に、逐一、起立→着座→起立→着座という一連の動作を行う必要がある。本発明の動作支援装置は、上記課題に鑑みて完成されたものである。本発明は、要介護者の動作負担が軽い動作支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)上記課題を解決するため、本発明の動作支援装置は、搭乗部と、該搭乗部に対して回動可能な下肢フレームと、該下肢フレームに対して回動可能な上肢フレームと、該上肢フレームに対して回動可能であって要介護者の身体の一部を保持する保持部と、を備え、該要介護者の起立動作および着座動作のうち少なくとも一方を支援することを特徴とする。
【0006】
本発明の動作支援装置は、保持部を備えている。保持部は、起立動作および着座動作のうち、少なくとも一方を支援することができる。保持部が起立動作を支援する場合は、要介護者が動作支援装置に乗る際の動作を補助することができる。保持部が着座動作を支援する場合は、要介護者が動作支援装置から降りる際の動作を補助することができる。
【0007】
(2)好ましくは、上記(1)の構成において、さらに、三つの関節部を備え、三つの該関節部のうち、第一の該関節部は、前記搭乗部と前記下肢フレームとを相対的に回動可能に連結し、三つの該関節部のうち、第二の該関節部は、該下肢フレームと前記上肢フレームとを相対的に回動可能に連結し、三つの該関節部のうち、第三の該関節部は、該上肢フレームと前記保持部とを相対的に回動可能に連結する構成とする方がよい。本構成によると、要介護者の体格(例えば、大人、子供、男性、女性、太め、細めなど)や姿勢などに応じて、保持部を動かすことができる。
【0008】
(3)好ましくは、上記(2)の構成において、さらに、前記関節部の動作を制御する制御部を備え、前記要介護者の起立動作および着座動作のうち少なくとも一方を支援する際、該制御部は、該要介護者の動きに応じて前記関節部を動かし前記保持部を移動させる構成とする方がよい。本構成によると、要介護者の動きに保持部の動きを追随させることができる。このため、要介護者の動きを保持部により補助することができる。
【0009】
(4)好ましくは、上記(3)の構成において、さらに、前記要介護者を検知可能な視覚センサを備え、該要介護者の起立動作を支援する際、前記制御部は、該視覚センサの画像情報を基に、前記保持部を該要介護者に近接させる構成とする方がよい。本構成によると、保持部が要介護者にアプローチする際、視覚センサの画像情報が用いられる。このため、要介護者の適切な部位に、保持部を近接させることができる。すなわち、要介護者の適切な部位を保持して、起立動作を支援することができる。
【0010】
(5)好ましくは、上記(1)ないし(4)のいずれかの構成において、前記保持部は、空気圧を調整することにより拡縮可能なエアバッグを有する構成とする方がよい。本構成によると、保持部の弾力を調整することができる。
【0011】
(6)好ましくは、上記(1)ないし(5)のいずれかの構成において、前記要介護者の起立動作を支援する際、該要介護者は前記搭乗部に足裏を載せ、さらに、該搭乗部における荷重分布を検知可能な荷重分布センサを備える構成とする方がよい。本構成によると、搭乗部の荷重分布から、要介護者の重心移動を認識することができる。このため、起立支援の際、動作支援装置が倒れるのを抑制することができる。
【0012】
(7)好ましくは、上記(1)ないし(6)のいずれかの構成において、さらに、前記要介護者の起立動作を支援する際、該要介護者の姿勢の変化に応じて、該要介護者の膝頭を膝裏方向に押圧する膝保持部を備える構成とする方がよい。本構成によると、要介護者が立ち上がりやすくなる。
【発明の効果】
【0013】
本発明によると、要介護者の動作負担が軽い動作支援装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の動作支援装置の一実施形態である歩行介助装置の前方から見た斜視図である。
【図2】同歩行介助装置の後方から見た斜視図である。
【図3】同歩行介助装置の右側面図である。
【図4】同歩行介助装置の収納状態の右側面図である。
【図5】同歩行介助装置の保持部の上面図である。
【図6】同歩行介助装置のブロック図である。
【図7】同歩行介助装置の呼出しステップにおける模式図である。
【図8】後方CCDカメラの画像の模式図である。
【図9】同歩行介助装置の保持動作ステップにおける模式図である。
【図10】同歩行介助装置の起立動作ステップにおける模式図(その1)である。
【図11】同歩行介助装置の起立動作ステップにおける模式図(その2)である。
【図12】同歩行介助装置の起立動作ステップにおける模式図(その3)である。
【図13】(a)〜(d)は身長の高い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す模式図である。(e)〜(h)は身長の低い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す模式図である。
【図14】歩行モードにおける同歩行介助装置の右側面図である。
【図15】着座モードにおける同歩行介助装置の右側面図である。
【発明を実施するための形態】
【0015】
以下、本発明の動作支援装置の一実施形態である歩行介助装置の実施の形態について説明する。
【0016】
<歩行介助装置の機械的構成>
まず、本実施形態の歩行介助装置の機械的構成について説明する。図1に、本実施形態の歩行介助装置の前方から見た斜視図を示す。図2に、同歩行介助装置の後方から見た斜視図を示す。図3に、同歩行介助装置の右側面図を示す。図4に、同歩行介助装置の収納状態の右側面図を示す。なお、図1においてはフロントパネル201およびサイドパネル200Rの一部を、図2においてはヒップボード25の一部を、図3および図4においてはサイドパネル200Rおよび駆動輪29Rを、それぞれ透過して示す。また、図3、図4においては、フロントパネル201の後面に配置されている部材を、適宜省略して示す。
【0017】
図1〜図4に示すように、歩行介助装置1は、下肢フレーム20と、上肢フレーム21と、保持部22と、フットボード23と、ニーサポート24と、ヒップボード25と、一対の駆動軸26と、上肢フレーム用揺動軸27と、保持部用揺動軸28と、一対の駆動輪29L、29Rと、一対の下肢フレーム用揺動軸30と、を備えている。
【0018】
下肢フレーム用揺動軸30、上肢フレーム用揺動軸27、保持部用揺動軸28は、各々、本発明の関節部に含まれる。フットボード23は、本発明の搭乗部に含まれる。ニーサポート24は、本発明の膝保持部に含まれる。
【0019】
(下肢フレーム20、下肢フレーム用揺動軸30)
下肢フレーム20は、一対のサイドパネル200L、200Rと、フロントパネル201と、を備えている。一対のサイドパネル200L、200Rは、各々、上下方向に延びる板状を呈している。一対のサイドパネル200L、200Rは、左右方向に対向して配置されている。一対のサイドパネル200L、200R間の間隔は、下方から上方に向かって狭まっている。フロントパネル201は、下方から上方に向かって尖る台形状を呈している。フロントパネル201は、一対のサイドパネル200L、200Rの前縁間に配置されている。
【0020】
左右一対の下肢フレーム用揺動軸30は、下肢フレーム20の下端とフットボード23の前端とを連結している。一方の下肢フレーム用揺動軸30は、サイドパネル200Lの下端内面に固定されている。他方の下肢フレーム用揺動軸30は、サイドパネル200Rの下端内面に固定されている。二つの下肢フレーム用揺動軸30は、下肢フレーム用モータ(図略)により、フットボード23に対して回動可能である。
【0021】
(駆動軸26、駆動輪29L、29R)
駆動軸26は、二つ配置されている。一方の駆動軸26は、サイドパネル200Lの下端外面に配置されている。他方の駆動軸26はサイドパネル200Rの下端外面に配置されている。二つの駆動軸26は、各々、駆動輪用モータ(図略)により、互いに独立して回動可能である。駆動輪29Lは、左方の駆動軸26に固定されている。駆動輪29Rは、右方の駆動軸26に固定されている。このため、駆動輪29L、29Rは、互いに独立して回動可能である。駆動軸26は、下肢フレーム用揺動軸30と、略同軸上に配置されている。
【0022】
(フットボード23)
フットボード23は、ボード本体230と、左右一対のアーム231と、フットボード用エアシリンダ232と、従動輪233と、を備えている。ボード本体230は、長方形板状を呈している。従動輪233は、ボード本体230の下面の後縁付近に配置されている。
【0023】
アーム231は、L字状を呈している。左側のアーム231の一端は、左側の下肢フレーム用揺動軸30に環装されている。左側のアーム231の他端は、ボード本体230の左前隅に固定されている。右側のアーム231の一端は、右側の下肢フレーム用揺動軸30に環装されている。右側のアーム231の他端は、ボード本体230の右前隅に固定されている。アーム231は、下肢フレーム用揺動軸30に対して、独立して回動可能である。
【0024】
フットボード用エアシリンダ232は、シリンダ本体232aと、ピストン232bと、を備えている。シリンダ本体232aの一端は、フロントパネル201の後面に、揺動可能に取り付けられている。ピストン232bの一端は、シリンダ本体232aの他端に対して、出入り可能である。ピストン232bの他端は、ボード本体230の上面に、揺動可能に取り付けられている。シリンダ本体232aにピストン232bを出し入れすることにより、ボード本体230を揺動させることができる。
【0025】
(ニーサポート24)
ニーサポート24は、サポート本体240と、左右一対の被ガイドレール241と、ニーサポート用エアシリンダ242と、左右一対のガイドブロック243と、を備えている。サポート本体240は、長方形板状を呈している。サポート本体240の後面には、クッションが配置されている。
【0026】
左側のガイドブロック243は、左側のサイドパネル200Lの右面に配置されている。右側のガイドブロック243は、右側のサイドパネル200Rの左面に配置されている。ガイドブロック243は、一対のブロック片243aを備えている。一対のブロック片243aは、上下方向に所定間隔だけ離間して配置されている。
【0027】
左右一対の被ガイドレール241は、弧状を呈している。左右一対の被ガイドレール241は、サポート本体240の前面の左右両縁付近から、前方に突設されている。左側の被ガイドレール241は、左側のガイドブロック243の一対のブロック片243a間を、弧状に摺動可能である。右側の被ガイドレール241は、右側のガイドブロック243の一対のブロック片243a間を、弧状に摺動可能である。
【0028】
ニーサポート用エアシリンダ242は、シリンダ本体242aと、ピストン242bと、を備えている。シリンダ本体242aの一端は、フロントパネル201の後面上縁付近に、揺動可能に取り付けられている。ピストン242bの一端は、シリンダ本体242aの他端に対して、出入り可能である。ピストン242bの他端は、サポート本体240の前面上縁付近に、揺動可能に取り付けられている。シリンダ本体242aにピストン242bを出し入れすると、ガイドブロック243に対して被ガイドレール241が摺動する。このため、下肢フレーム20に対して、サポート本体240を弧状に動かすことができる。
【0029】
(ヒップボード25)
ヒップボード25は、ボード本体250と、パイプ251と、シャフト252と、ヒップボード用揺動軸253と、を備えている。ヒップボード用揺動軸253は、サイドパネル200Rの右面から突設されている。シャフト252は、ヒップボード用揺動軸253の外周面から突設されている。パイプ251は、シャフト252の先端に配置されている。シャフト252は、パイプ251に対して、出入り可能である。パイプ251は、シャフト252に対して、回動可能である。ボード本体250は、長方形板状を呈している。パイプ251は、ボード本体250の右前隅に固定されている。
【0030】
ヒップボード用揺動軸253を回動させることにより、ヒップボード25全体を揺動させることができる。シャフト252に対してパイプ251を回動させることにより、シャフト252に対してボード本体250を揺動させることができる。パイプ251に対してシャフト252を出入りさせることにより、ヒップボード用揺動軸253に対してボード本体250を離間あるいは近接させることができる。
【0031】
(上肢フレーム用揺動軸27、上肢フレーム21)
上肢フレーム用揺動軸27は、下肢フレーム20の上端と上肢フレーム21の下端とを連結している。上肢フレーム用揺動軸27は、上肢フレーム用モータ(図略)により、下肢フレーム20に対して回動可能である。上肢フレーム21は、直方体箱状を呈している。上肢フレーム21は、上肢フレーム用揺動軸27に固定されている。上肢フレーム用揺動軸27を回動させることにより、下肢フレーム20に対して、上肢フレーム21を揺動させることができる。上肢フレーム21の下端には、溝部が形成されている。溝部からは、カメラ用ホイール411aが表出している。カメラ用ホイール411aは、上肢フレーム用揺動軸27に対して、独立して回動可能である。
【0032】
(保持部用揺動軸28、保持部22)
保持部用揺動軸28は、上肢フレーム21の後端と保持部22の前端とを連結している。保持部用揺動軸28は、保持部用モータ(図略)により、上肢フレーム21に対して回動可能である。図5に、本実施形態の歩行介助装置の保持部の上面図を示す。図5に示すように、保持部22は、中央部220Cと、左翼部220Lと、右翼部220Rと、左翼部用揺動軸221Lと、右翼部用揺動軸221Rと、左右一対のグリップ222L、222Rと、ディスプレイ223と、を備えている。
【0033】
中央部220Cは、上方から見て、T字板状を呈している。中央部220Cの前端は、保持部用揺動軸28に固定されている。中央部220Cの後面には、中央エアバッグ224Cが配置されている。左右一対のグリップ222L、222Rは、中央部220Cの前面に配置されている。左右一対のグリップ222L、222Rは、駆動輪29L、29Rの操作のために用いられる。ディスプレイ223は、中央部220Cの上方に配置されている。ディスプレイ223には、歩行介助装置1の速度、走行ルートなどが表示される。また、ディスプレイ223のタッチパネル部を介して、要介護者は、各種コマンド、データなどを入力することができる。
【0034】
左翼部用揺動軸221Lは、中央部220Cの左端と左翼部220Lの前端とを連結している。左翼部用揺動軸221Lは、左翼部用モータ(図略)により、中央部220Cに対して回動可能である。左翼部220Lは、弧板状を呈している。左翼部220Lは、左翼部用揺動軸221Lに固定されている。図5に細線で示すように、左翼部用揺動軸221Lを回動させることにより、中央部220Cに対して、左翼部220Lを揺動させることができる。左翼部220Lの右面および上面には、左方エアバッグ224Lが配置されている。
【0035】
右翼部用揺動軸221R、右翼部220Rは、左翼部用揺動軸221L、左翼部220Lと、同様の構成を備えている。また、右翼部用揺動軸221R、右翼部220Rは、中央部220Cを挟んで、左翼部用揺動軸221L、左翼部220Lに対して、左右対称に配置されている。このため、説明を割愛する。
【0036】
中央部220C(中央エアバッグ224C)、左翼部220L(左方エアバッグ224L)、右翼部220R(右方エアバッグ224R)は、全体としてC字状に連なっている。左翼部用揺動軸221L、右翼部用揺動軸221Rを回動させることにより、C字開口幅を変更することができる。
【0037】
<歩行介助装置の電気的構成>
次に、本実施形態の歩行介助装置の電気的構成について説明する。図6に、本実施形態の歩行介助装置のブロック図を示す。図1〜図6に示すように、歩行介助装置1は、制御ボックス40と、リモコン410と、各種センサ(前方CCD(Charge−Coupled Device)カメラ411、後方CCDカメラ412、保持部用揺動軸トルクセンサ413、上肢フレーム用揺動軸トルクセンサ414、下肢フレーム用揺動軸トルクセンサ415、左翼部用揺動軸トルクセンサ416、右翼部用揺動軸トルクセンサ417、左方エアバッグ用荷重センサ418、右方エアバッグ用荷重センサ419、ジャイロセンサ420、加速度センサ421、荷重分布センサ422、八つの距離センサ423)と、各種アクチュエータ(保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434、中央エアコンプレッサ435、左方エアコンプレッサ436、右方エアコンプレッサ437、二つの駆動輪用モータ438)と、バッテリ440と、を備えている。制御ボックス40は、本発明の制御部に含まれる。後方CCDカメラ412は、本発明の視覚センサに含まれる。
【0038】
制御ボックス40は、コンピュータ400と、入出力部401と、受光部402と、を備えている。コンピュータ400は、CPU(Central Processing Unit)400aと、メモリ400bと、を備えている。上記各種センサおよび各種アクチュエータは、入出力部401に電気的に接続されている。各種アクチュエータと入出力部401との間には、各々、駆動回路(図略)が介装されている。また、リモコン410は、受光部402に、所定の信号を伝送可能である。また、前記グリップ222L、222R、ディスプレイ223、ニーサポート用エアシリンダ242、フットボード用エアシリンダ232も、入出力部401に電気的に接続されている。
【0039】
制御ボックス40は、フロントパネル201の後面に配置されている。コンピュータ400のメモリ400bには、複数の要介護者の身体データ(身長、体重、胸囲、座高、足の膝上部の長さ、足の膝下部の長さなど)が格納されている。また、メモリ400bには、起立動作支援プログラム、着座動作支援プログラムなどが格納されている。すなわち、要介護者が起立動作あるいは着座動作を行う際の保持部22、ニーサポート24の軌跡、速度、各種揺動軸のトルクなどが、各要介護者ごとに格納されている。リモコン410は、歩行介助装置1とは別体である。リモコン410は、要介護者が歩行介助装置1を遠隔操作する際に用いられる。前方CCDカメラ411は、上肢フレーム21下端のカメラ用ホイール411aに固定されている。上肢フレーム21が揺動し角度が変わっても、前方CCDカメラ411を前方に向けることができる。前方CCDカメラ411は、前方確認のために用いられる。後方CCDカメラ412は、ディスプレイ223の後方に配置されている。後方CCDカメラ412は、後方確認および要介護者の表情確認のために用いられる。
【0040】
保持部用揺動軸トルクセンサ413は保持部用揺動軸28に、上肢フレーム用揺動軸トルクセンサ414は上肢フレーム用揺動軸27に、下肢フレーム用揺動軸トルクセンサ415は下肢フレーム用揺動軸30に、左翼部用揺動軸トルクセンサ416は左翼部用揺動軸221Lに、右翼部用揺動軸トルクセンサ417は右翼部用揺動軸221Rに、それぞれ配置されている。これら各種トルクセンサは、各種揺動軸のトルクを、それぞれ検知するために用いられる。
【0041】
左方エアバッグ用荷重センサ418は左方エアバッグ224Lに、右方エアバッグ用荷重センサ419は右方エアバッグ224Rに、それぞれ配置されている。これら荷重センサは、各々、対応するエアバッグが要介護者から受ける荷重を検知するために用いられる。
【0042】
ジャイロセンサ420は、フロントパネル201の後面に配置されている。ジャイロセンサ420は、歩行介助装置1の傾斜を検知するために用いられる。加速度センサ421は、フロントパネル201の後面に配置されている。加速度センサ421は、歩行介助装置1の加速度を検知するために用いられる。
【0043】
荷重分布センサ422は、フットボード23のボード本体230に配置されている。荷重分布センサ422は、フットボード23のボード本体230における、要介護者の重心を検知するために用いられる。距離センサ423は、ボード本体230の後縁に三つ、左右両縁に一つずつ、フロントパネル201の前面下縁に三つ、配置されている。距離センサ423は、歩行介助装置1と隣接物との間の距離を検知するために用いられる。
【0044】
保持部用モータ430は保持部用揺動軸28に、上肢フレーム用モータ431は上肢フレーム用揺動軸27に、下肢フレーム用モータ432は下肢フレーム用揺動軸30に、左翼部用モータ433は左翼部用揺動軸221Lに、右翼部用モータ434は右翼部用揺動軸221Rに、それぞれ連結されている。これら各種モータは、各種揺動軸を、それぞれ回動させるために用いられる。
【0045】
中央エアコンプレッサ435、左方エアコンプレッサ436、右方エアコンプレッサ437は、フロントパネル201の後面に配置されている。各種エアコンプレッサには、各々、空気圧センサが配置されている。中央エアコンプレッサ435は中央エアバッグ224Cの空気圧を、左方エアコンプレッサ436は左方エアバッグ224Lの空気圧を、右方エアコンプレッサ437は右方エアバッグ224Rの空気圧を、それぞれ調整するために用いられる。二つの駆動輪用モータ438は、駆動軸26に連結されている。二つの駆動輪用モータ438は、各々、駆動輪29L、29Rを回動させるために用いられる。
【0046】
<歩行介助装置の動作>
次に、本実施形態の歩行介助装置の動きについて説明する。
【0047】
(起立動作支援)
まず、本実施形態の歩行介助装置の起立動作支援時の動きについて説明する。起立動作支援時の動きは、呼出しステップと、自走ステップと、保持準備ステップと、保持動作ステップと、起立動作ステップと、を有している。
【0048】
呼出しステップにおいては、要介護者が歩行介助装置1を呼び出す。図7に、本実施形態の歩行介助装置の呼出しステップにおける模式図を示す。なお、ヒップボード25は省略して示す。図7に示すように、要介護者Aは、ベッド90に腰掛けている。要介護者Aがリモコン410の「呼出しボタン」を押すと、受光部402を介してコンピュータ400に、歩行介助装置1を呼び出す命令が伝送される。
【0049】
自走ステップにおいては、歩行介助装置1が自走し、要介護者Aの近くまで移動する。要介護者Aからの呼出しを受け、CPU400aは、駆動輪用モータ438を駆動し、駆動輪29L、29Rを回動させる。すなわち、歩行介助装置1を走行させる。この際、前方CCDカメラ411、後方CCDカメラ412、八つの距離センサ423により、周囲の安全を確認する。障害物が走行ルート上にあるとCPU400aが判断した場合、CPU400aは駆動輪用モータ438を適切に駆動し当該障害物を迂回する。ジャイロセンサ420は、走行時における歩行介助装置1のバランスをとる。歩行介助装置1は、要介護者Aの前方の所定位置で停止する。
【0050】
保持準備ステップにおいては、要介護者Aを保持する準備を行う。図8に、後方CCDカメラの画像の模式図を示す。図8に示すように、CPU400aには、後方CCDカメラ412の画像412aが伝送される。まず、CPU400aは、画像412aとメモリ400bに格納された身体データとを比較し、複数の要介護者の中から、今回呼び出した要介護者Aが誰であるかを判別する。次に、CPU400aは、歩行介助装置1を微速後進させる。CPU400aは、後方の距離センサ423からの信号により、ボード本体230が要介護者Aのつま先の直前に来たと判断した位置で、歩行介助装置1を停止させる。続いて、CPU400aは、ジャイロセンサ420からの信号により、フットボード用エアシリンダ232を駆動する。そして、フットボード23のボード本体230を、略水平状態にする。それから、要介護者Aは、ボード本体230に両足を載せる。荷重分布センサ422は、要介護者Aの両足裏の荷重分布を検知する。CPU400aは、当該荷重分布から要介護者Aがボード本体230に両足を載せたことを認識する。
【0051】
保持動作ステップにおいては、保持部22により要介護者Aの胴部を保持する。CPU400aは、要介護者Aの身体データ、姿勢に応じて、保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434を駆動する。すなわち、歩行介助装置1を、要介護者Aの身体データ、姿勢に応じて、変形させる。
【0052】
図9に、本実施形態の歩行介助装置の保持動作ステップにおける模式図を示す。なお、ヒップボード25は省略して示す。図9に示すように、保持部22は、要介護者Aの胴部を、三方(前方、左方、右方)から保持する。すなわち、中央エアバッグ224Cが要介護者Aの胸部に弾接した状態で、CPU400aは、左翼部220Lおよび右翼部220Rを、要介護者Aを挟み込む方向に揺動させる。左方エアバッグ用荷重センサ418および右方エアバッグ用荷重センサ419の荷重が所定値に到達したところで、CPU400aは、左翼部220Lおよび右翼部220Rの揺動を停止する。
【0053】
保持動作ステップにおいては、保持部用揺動軸トルクセンサ413により保持部用揺動軸28のトルクを、上肢フレーム用揺動軸トルクセンサ414により上肢フレーム用揺動軸27のトルクを、下肢フレーム用揺動軸トルクセンサ415により下肢フレーム用揺動軸30のトルクを、左翼部用揺動軸トルクセンサ416により左翼部用揺動軸221Lのトルクを、右翼部用揺動軸トルクセンサ417により右翼部用揺動軸221Rのトルクを、それぞれ継続的に監視する。
【0054】
起立動作ステップにおいては、要介護者Aがベッド90から立ち上がるのを補助する。図10に、本実施形態の歩行介助装置の起立動作ステップにおける模式図(その1)を示す。図11に、同歩行介助装置の起立動作ステップにおける模式図(その2)を示す。図12に、同歩行介助装置の起立動作ステップにおける模式図(その3)を示す。なお、ヒップボード25は省略して示す。
【0055】
図10に示すように、起立動作ステップの前段においては、メモリ400bの起立動作支援プログラムに従って、CPU400aは、保持部用モータ430、上肢フレーム用モータ431、下肢フレーム用モータ432、左翼部用モータ433、右翼部用モータ434を適宜駆動し、所定の軌跡で保持部22を動かす。このため、保持部22に保持されたまま、要介護者Aの胴部も略同じ軌跡で移動する。したがって、要介護者Aは、胴部の移動に応じて、ベッド90から立ち上がる。
【0056】
図11に示すように、起立動作ステップの後段においては、要介護者Aは膝を伸ばす必要がある。この際、CPU400aは、メモリ400bの起立動作支援プログラムに従って、ニーサポート用エアシリンダ242を駆動する。すなわち、サポート本体240を後方に移動させ、要介護者Aの膝頭を後方(膝裏方向)に押圧する。このため、図12に示すように、要介護者Aは、簡単に膝を伸ばすことができる。
【0057】
このようにして、要介護者Aは、ボード本体230上に起立することができる。要介護者Aの両脇は、保持部22により引き続き保持されている。なお、起立動作ステップにおいても、保持動作ステップ同様に、各種トルクセンサにより、各種揺動軸のトルクを継続的に監視する。また、荷重分布センサ422から得られる要介護者Aの荷重分布の変化から、重心移動を監視する。また、ジャイロセンサ420により、要介護者Aの重心が移動しても歩行介助装置1が倒れないように、バランスをとる。また、各種トルクセンサ、各種荷重センサ、荷重分布センサ422、ジャイロセンサ420の信号から、要介護者Aの動作と保持部22の動作とが同期していないとCPU400aが判断した場合は、要介護者Aの動作に保持部22の動作を同期させる。また、後方CCDカメラ412の画像から要介護者Aの表情変化を監視し、要介護者Aが苦痛を受けているとCPU400aが判断した場合は、非常停止する。なお、CPU400aは、要介護者Aの顔面の特徴点(例えば、目、眉、鼻、口角など)の変位量から、要介護者Aの表情変化を判断する。
【0058】
(移動支援)
続いて、本実施形態の歩行介助装置の移動支援時の動きについて説明する。移動支援時においては、ちょうど保持部22に要介護者Aがおぶさるような姿勢のまま(ただし足裏はボード本体230に載っている)、要介護者Aが歩行介助装置1を前進させる。具体的には、要介護者Aは、グリップ222L、222Rを介して駆動輪29L、29Rを操作し、歩行介助装置1の速度、進行方向を調整する。この際、前方CCDカメラ411、後方CCDカメラ412、八つの距離センサ423により、周囲の安全を確認する。要介護者Aは、歩行介助装置1を、着座予定位置(例えば、椅子、便座など)の直近で停止させる。
【0059】
移動支援ステップにおいても、起立動作ステップ同様に、各種トルクセンサにより、各種揺動軸のトルクを継続的に監視する。また、荷重分布センサ422から得られる要介護者Aの荷重分布の変化から、重心移動を監視する。また、ジャイロセンサ420により、歩行介助装置1のバランスをとる。また、後方CCDカメラ412の画像から、要介護者Aの表情変化を監視し、要介護者Aが苦痛を受けているとCPU400aが判断した場合は、非常停止する。
【0060】
(着座動作支援)
続いて、本実施形態の歩行介助装置の着座動作支援時の動きについて説明する。着座動作支援時においては、まず、前方CCDカメラ411により、CPU400aが着座予定位置を認識する。次いで、CPU400aからの指示により、歩行介助装置1は、着座予定位置に要介護者Aの背中が正対するように、移動する。続いて、歩行介助装置1は、上記起立動作支援時の動きと逆の動き(つまり、図12→図11→図10→図9という順序の動き)を行うことにより、要介護者Aが着座予定位置に着座するのを補助する。
【0061】
<作用効果>
次に、本実施形態の歩行介助装置1の作用効果について説明する。本実施形態の歩行介助装置1は、保持部22を備えている。保持部22は、要介護者Aを立位で保持することができる。このため、要介護者Aは、移動の際、一回起立するだけで済む。したがって、要介護者Aの動作負担が軽い。また、要介護者Aは立位のまま移動することができる。このため、健常者と同様の高さの目線を確保した状態で、移動することができる。また、保持部22は、前方から要介護者Aを保持することができる。このため、要介護者Aは、あたかも保持部22におぶさるような姿勢のまま移動することができる。すなわち、立位であるにもかかわらず、要介護者Aは、楽な姿勢で移動することができる。また、保持部22は、要介護者Aの起立動作および着座動作を支援することができる。
【0062】
また、本実施形態の歩行介助装置1は、三つの揺動軸(保持部用揺動軸28、上肢フレーム用揺動軸27、下肢フレーム用揺動軸30)を備えている。このため、要介護者Aの体格(例えば、大人、子供、男性、女性、太め、細めなど)や姿勢などに応じて、保持部22を動かすことができる。図13(a)〜(d)に、身長の高い要介護者の起立動作を支援する際の本実施形態の歩行介助装置の動きを示す。図13(e)〜(h)に、身長の低い要介護者の起立動作を支援する際の同歩行介助装置の動きを示す。なお、ニーサポート24、ヒップボード25は省略して示す。図13に示すように、要介護者Aの身長が高い場合と低い場合とでは、下肢フレーム20、上肢フレーム21、保持部22の動きが異なる。このように、本実施形態の歩行介助装置1によると、要介護者Aの体格や姿勢などに応じて、保持部22の高さや角度などを調整することができる。また、本実施形態の歩行介助装置1によると、三つの揺動軸を適切に制御することにより、要介護者Aの胴部の動きに、保持部22の動きを追随させることができる。
【0063】
また、本実施形態の歩行介助装置1によると、保持部22が要介護者Aの脇の下にアプローチする際、後方CCDカメラ412の画像情報が用いられる。このため、要介護者Aの脇の下に、確実に保持部22を当接させることができる。また、本実施形態の歩行介助装置1によると、中央エアバッグ224C、左方エアバッグ224L、右方エアバッグ224Rの空気圧を調整することにより、要介護者Aが保持部22から受ける弾力を、調整することができる。
【0064】
また、本実施形態の歩行介助装置1によると、荷重分布センサ422により、ボード本体230の荷重分布を検出することができる。このため、要介護者Aの重心移動を認識することができる。したがって、起立支援の際、歩行介助装置1が倒れるのを抑制することができる。また、本実施形態の歩行介助装置1によると、ニーサポート24により、要介護者Aの起立動作を支援する際、要介護者Aの膝頭を膝裏方向に押圧することができる。このため、要介護者Aが膝を伸ばしやすくなる。
【0065】
また、本実施形態の歩行介助装置1によると、中央エアバッグ224C、左方エアバッグ224L、右方エアバッグ224Rが個別に配置されている。このため、各種エアバッグの空気圧に、差を設けることができる。例えば、要介護者Aの胴部が上昇する場合は、左方エアバッグ224Lおよび右方エアバッグ224Rの空気圧を中央エアバッグ224Cの空気圧よりも高く設定することにより、要介護者Aの両脇を下方からしっかりと支持することができる。また、要介護者Aの胴部が前方に移動する場合は、中央エアバッグ224Cの空気圧を左方エアバッグ224Lおよび右方エアバッグ224Rの空気圧よりも高く設定することにより、要介護者Aの胸部を前方からしっかりと支持することができる。
【0066】
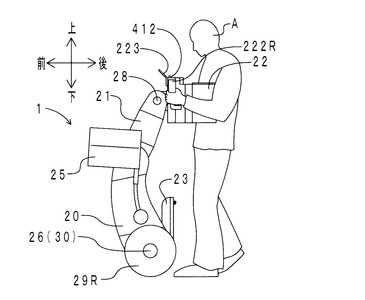
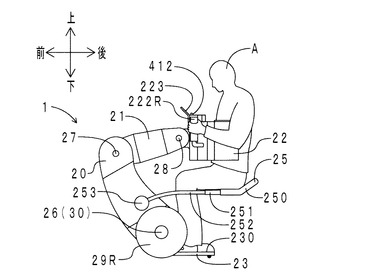
また、本実施形態の歩行介助装置1は、歩行モード、着座モードに切り替えることも可能である。図14に、歩行モードにおける本実施形態の歩行介助装置の右側面図を示す。図15に、着座モードにおける同歩行介助装置の右側面図を示す。図14に示すように、歩行モードにおいては、フットボード23が折り畳まれている。要介護者Aは、保持部22により胴部を保持された状態で、歩行訓練を行うことができる。図15に示すように、着座モードにおいては、ヒップボード25が後方に展開されている。要介護者Aは、ヒップボード25に座った状態で、移動することができる。
【0067】
<その他>
以上、本発明の動作支援装置の実施の形態について説明した。しかしながら、実施の形態は上記形態に特に限定されるものではない。当業者が行いうる種々の変形的形態、改良的形態で実施することも可能である。
【0068】
例えば、ニーサポート24、ヒップボード25は配置しなくてもよい。また、駆動輪29L、29Rは、例えば、無限軌道、脚、蛇行可能な多節体などでもよい。また、各種トルクセンサとして、例えば、シャント抵抗式、ホールモジュール式のトルクセンサを用いてもよい。また、各種CCDカメラの代わりに、例えば、CMOS(Complementary Metal−Oxide Semiconductor)カメラ、赤外カメラなどを用いてもよい。また、各種荷重センサとして、例えば、歪みゲージ式の荷重センサを用いてもよい。また、加速度センサ421として、例えば、機械式、光学式、半導体式の加速度センサを用いてもよい。また、荷重分布センサ422として、例えば、感圧素子を複数有する感圧フィルムセンサを用いてもよい。また、ボード本体230に荷重センサを複数配置することにより、重心管理を行ってもよい。また、距離センサ423として、例えば、超音波式、レーザ式の距離センサを用いてもよい。また、各種モータの代わりに、油圧シリンダ、エアシリンダ、人工筋肉など他のアクチュエータを用いてもよい。同様に、各種エアシリンダの代わりに、油圧シリンダ、モータ、人工筋肉など他のアクチュエータを用いてもよい。
【符号の説明】
【0069】
1:歩行介助装置(動作支援装置)。
20:下肢フレーム、21:上肢フレーム、22:保持部、23:フットボード(搭乗部)、24:ニーサポート(膝保持部)、25:ヒップボード、26:駆動軸、27:上肢フレーム用揺動軸(関節部)、28:保持部用揺動軸(関節部)、29L:駆動輪、29R:駆動輪、30:下肢フレーム用揺動軸(関節部)、40:制御ボックス(制御部)、90:ベッド。
200L:サイドパネル、200R:サイドパネル、201:フロントパネル、220C:中央部、220L:左翼部、220R:右翼部、221L:左翼部用揺動軸、221R:右翼部用揺動軸、222L:グリップ、222R:グリップ、223:ディスプレイ、224C:中央エアバッグ、224L:左方エアバッグ、224R:右方エアバッグ、230:ボード本体、231:アーム、232:フットボード用エアシリンダ、232a:シリンダ本体、232b:ピストン、233:従動輪、240:サポート本体、241:被ガイドレール、242:ニーサポート用エアシリンダ、242a:シリンダ本体、242b:ピストン、243:ガイドブロック、243a:ブロック片、250:ボード本体、251:パイプ、252:シャフト、253:ヒップボード用揺動軸、400:コンピュータ、400a:CPU、400b:メモリ、401:入出力部、402:受光部、410:リモコン、411:前方CCDカメラ、411a:カメラ用ホイール、412:後方CCDカメラ(視覚センサ)、412a:画像、413:保持部用揺動軸トルクセンサ、414:上肢フレーム用揺動軸トルクセンサ、415:下肢フレーム用揺動軸トルクセンサ、416:左翼部用揺動軸トルクセンサ、417:右翼部用揺動軸トルクセンサ、418:左方エアバッグ用荷重センサ、419:右方エアバッグ用荷重センサ、420:ジャイロセンサ、421:加速度センサ、422:荷重分布センサ、423:距離センサ、430:保持部用モータ、431:上肢フレーム用モータ、432:下肢フレーム用モータ、433:左翼部用モータ、434:右翼部用モータ、435:中央エアコンプレッサ、436:左方エアコンプレッサ、437:右方エアコンプレッサ、438:駆動輪用モータ、440:バッテリ。
A:要介護者。
【特許請求の範囲】
【請求項1】
搭乗部と、該搭乗部に対して回動可能な下肢フレームと、該下肢フレームに対して回動可能な上肢フレームと、該上肢フレームに対して回動可能であって要介護者の身体の一部を保持する保持部と、を備え、
該要介護者の起立動作および着座動作のうち少なくとも一方を支援する動作支援装置。
【請求項2】
さらに、三つの関節部を備え、
三つの該関節部のうち、第一の該関節部は、前記搭乗部と前記下肢フレームとを相対的に回動可能に連結し、
三つの該関節部のうち、第二の該関節部は、該下肢フレームと前記上肢フレームとを相対的に回動可能に連結し、
三つの該関節部のうち、第三の該関節部は、該上肢フレームと前記保持部とを相対的に回動可能に連結する請求項1に記載の動作支援装置。
【請求項3】
さらに、前記関節部の動作を制御する制御部を備え、
前記要介護者の起立動作および着座動作のうち少なくとも一方を支援する際、該制御部は、該要介護者の動きに応じて前記関節部を動かし前記保持部を移動させる請求項2に記載の動作支援装置。
【請求項4】
さらに、前記要介護者を検知可能な視覚センサを備え、
該要介護者の起立動作を支援する際、前記制御部は、該視覚センサの画像情報を基に、前記保持部を該要介護者に近接させる請求項3に記載の動作支援装置。
【請求項5】
前記保持部は、空気圧を調整することにより拡縮可能なエアバッグを有する請求項1ないし請求項4のいずれかに記載の動作支援装置。
【請求項6】
前記要介護者の起立動作を支援する際、該要介護者は前記搭乗部に足裏を載せ、
さらに、該搭乗部における荷重分布を検知可能な荷重分布センサを備える請求項1ないし請求項5のいずれかに記載の動作支援装置。
【請求項7】
さらに、前記要介護者の起立動作を支援する際、該要介護者の姿勢の変化に応じて、該要介護者の膝頭を膝裏方向に押圧する膝保持部を備える請求項1ないし請求項6のいずれかに記載の動作支援装置。
【請求項1】
搭乗部と、該搭乗部に対して回動可能な下肢フレームと、該下肢フレームに対して回動可能な上肢フレームと、該上肢フレームに対して回動可能であって要介護者の身体の一部を保持する保持部と、を備え、
該要介護者の起立動作および着座動作のうち少なくとも一方を支援する動作支援装置。
【請求項2】
さらに、三つの関節部を備え、
三つの該関節部のうち、第一の該関節部は、前記搭乗部と前記下肢フレームとを相対的に回動可能に連結し、
三つの該関節部のうち、第二の該関節部は、該下肢フレームと前記上肢フレームとを相対的に回動可能に連結し、
三つの該関節部のうち、第三の該関節部は、該上肢フレームと前記保持部とを相対的に回動可能に連結する請求項1に記載の動作支援装置。
【請求項3】
さらに、前記関節部の動作を制御する制御部を備え、
前記要介護者の起立動作および着座動作のうち少なくとも一方を支援する際、該制御部は、該要介護者の動きに応じて前記関節部を動かし前記保持部を移動させる請求項2に記載の動作支援装置。
【請求項4】
さらに、前記要介護者を検知可能な視覚センサを備え、
該要介護者の起立動作を支援する際、前記制御部は、該視覚センサの画像情報を基に、前記保持部を該要介護者に近接させる請求項3に記載の動作支援装置。
【請求項5】
前記保持部は、空気圧を調整することにより拡縮可能なエアバッグを有する請求項1ないし請求項4のいずれかに記載の動作支援装置。
【請求項6】
前記要介護者の起立動作を支援する際、該要介護者は前記搭乗部に足裏を載せ、
さらに、該搭乗部における荷重分布を検知可能な荷重分布センサを備える請求項1ないし請求項5のいずれかに記載の動作支援装置。
【請求項7】
さらに、前記要介護者の起立動作を支援する際、該要介護者の姿勢の変化に応じて、該要介護者の膝頭を膝裏方向に押圧する膝保持部を備える請求項1ないし請求項6のいずれかに記載の動作支援装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−78601(P2013−78601A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−268835(P2012−268835)
【出願日】平成24年12月7日(2012.12.7)
【分割の表示】特願2009−165024(P2009−165024)の分割
【原出願日】平成21年7月13日(2009.7.13)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成24年12月7日(2012.12.7)
【分割の表示】特願2009−165024(P2009−165024)の分割
【原出願日】平成21年7月13日(2009.7.13)
【出願人】(000237271)富士機械製造株式会社 (775)
【Fターム(参考)】
[ Back to top ]