
動作検出センサ及びそのキャリブレーション方法
【課題】本発明は被検査体に装着して被検査体の動作を検出する動作検出センサ及びそのキャリブレーション方法に関し、被検査体の動作力が小さい場合であっても高精度に動作検出を行うことを課題とする。
【解決手段】ベース部材11と、第1及び第2の検出片12,13と、第1及び第2の検出素子14,15とを有する。第1の検出片12は、ベース部材11から延出すると共に被検査体となる指Aに接触し、動作時に指Aの変形に伴い変位するよう構成する。第2の検出片13は、ベース部材11の第1の検出片12の延出位置と異なる位置から延出すると共に指Aと接触し、動作時に指Aに発生する変形に伴い変位するよう構成する。第1及び第2の検出素子14,15はベース部材11に配設され、第1の検出素子14は第1の検出片12の変位を検出し、第2の検出素子15は第2の検出片13の変位を検出するよう構成する。かつ、第1及び第2の検出片12,13が指Aを挟持することにより指Aに装着されるよう構成する。
【解決手段】ベース部材11と、第1及び第2の検出片12,13と、第1及び第2の検出素子14,15とを有する。第1の検出片12は、ベース部材11から延出すると共に被検査体となる指Aに接触し、動作時に指Aの変形に伴い変位するよう構成する。第2の検出片13は、ベース部材11の第1の検出片12の延出位置と異なる位置から延出すると共に指Aと接触し、動作時に指Aに発生する変形に伴い変位するよう構成する。第1及び第2の検出素子14,15はベース部材11に配設され、第1の検出素子14は第1の検出片12の変位を検出し、第2の検出素子15は第2の検出片13の変位を検出するよう構成する。かつ、第1及び第2の検出片12,13が指Aを挟持することにより指Aに装着されるよう構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は動作検出センサ及びそのキャリブレーション方法に係り、特に被検査体に装着して被検査体の動作を検出する動作検出センサ及びそのキャリブレーション方法に関する。
【背景技術】
【0002】
一般に、化粧を行う場合には種々の化粧品や化粧道具を用いる。化粧品の中には、化粧を行う人(以下、施術者という)が化粧品を直接把持して化粧を行うものがある(例えば、マスカラ,アイライナー等)。また化粧を行うに際し、施術者が化粧道具(リップブラシやチークブラシ等の各種ブラシ、メーキャップパフ、ファンデーションスポンジ、コットン等)を用いる場合もある。
【0003】
このように化粧を行う場合、施術者は化粧品や化粧道具(以下、総称して化粧道具等という)を手にとって使用することになる。従って化粧道具等は、施術者が直接把持した際の使用感を向上させることが重要となる。また、使用性の向上を客観的に判断できるように、化粧道具等の使用感は定量的に検出できることが望ましい。
【0004】
この化粧道具等の使用感を定量的に検出するには、化粧を行う際の指先の動作と、その動作を行った時に指先に感じる感触を検出することが必要となる。指先に感じる感触は、被験者(化粧道具等を使用する者)に対して官能検査を行うことにより得ることができる。これに対して指先の動作は、特許文献1に開示されているような動作検出センサを用いて検出することが可能である。この特許文献1に開示されたセンサでは、指の爪に歪みセンサを配置し、指の動作時に爪に発生する歪みを検出することにより指先の動作を検知する構成とされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−265522号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された発明は、爪に直接センサを接着剤等を用いて貼着する構成であったため、取り扱いが不便であるという問題点があった。また、爪の大きさや剛性には個人差があり、被験者の爪の個人特性により検出結果が左右されるという問題点があった。
【0007】
更に、強い動作を行う場合には爪の歪みが確実に発生するため精度の高い動作検出が行えるが、化粧道具等を使用する時のような、あまり大きな力を必要としない動作の場合には爪に発生する歪が小さく、高精度の動作検出が行えないという問題点があった。
【0008】
本発明は上記の点に鑑みてなされたものであり、被検査体の動作力が小さい場合であっても高精度に動作検出を行いうる動作検出センサ及びそのキャリブレーション方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題は、第1の観点からは、
基部と、
該基部から延出すると共に被検査体と接触し、動作時に該被検査体に発生する変形に伴い変位する前記第1の検出片と、
前記基部の前記第1の検出片の延出位置と異なる位置から延出すると共に被検査体と接触し、動作時に前記被検査体に発生する変形に伴い変位する前記第2の検出片と、
前記基部に配設されており、前記第1の検出片の変位を検出する第1の検出素子と、
前記基部に配設されており、前記第2の検出片の変位を検出する第2の検出素子とを有し、
前記第1及び第2の検出片が前記被検査体を挟持することにより前記被検査体に装着されることを特徴とする動作検出センサにより解決することができる。
【0010】
また上記の課題は、他の観点からは、
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
天秤の一方の皿に既知の重さを有した錘を乗せる第1のステップと、
前記天秤の他方の皿を前記動作検出センサを装着した被検査体で押圧し、前記各皿を均衡状態とさせる第2のステップと、
該均衡状態において前記動作検出センサから出力される電気信号に基づき求められる電圧値を検出する第3のステップと、
前記錘の重さと前記電圧値とを関連付けて記録する第4のステップとを有し、
前記第1乃至第4のステップを前記錘の重さを変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法により解決することができる。
【0011】
また上記の課題は、他の観点からは、
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
圧力センサを前記動作検出センサを装着した被検査体で押圧し、該圧力センサで検出される荷重と、前記動作検出センサから出力される電気信号に基づき求められる電圧値とを検出する第1のステップと、
前記圧力センサで検出される荷重と前記電圧値とを関連付けて記録する第2のステップとを有し、
前記第1及び第2のステップを前記圧力センサを押圧する力を変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法により解決することができる。
【発明の効果】
【0012】
開示の動作検出センサによれば、第1及び第2の検出片の延出位置が異なっており、また動作時に被検査体に発生する変形に伴い変位する第1及び第2の検出片を基部に設けた第1及び第2の検出素子で個別に検出するため、被検査体の動作を確実に検出することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の一実施形態である動作検出センサの断面図である。
【図2】図2(A)は本発明の一実施形態である動作検出センサの平面図、図2(B)は本発明の一実施形態である動作検出センサの正面図、図2(C)は本発明の一実施形態である動作検出センサの右側面図である。
【図3】図3は、動作検出センサを指に装着した状態を示す図である。
【図4】図4は、力を作用させた場合の感圧ゴムの力と電気抵抗との関係を示す図である。
【図5】図5は本発明の一実施形態である動作検出センサを用いた動作検出処理を示し、図5(A)は指を押圧動作した時の図、図5(B)は指をX1方向に移動動作させた時の図、図5(C)は指をX2方向に移動動作した時の図である。
【図6】図6は、指をX1,X2方向に交互に移動動作した時の動作検出センサからの出力を示す図である。
【図7】図7は、本発明の一実施形態である動作検出センサに対する第1のキャリブレーション処理を説明するための図である。
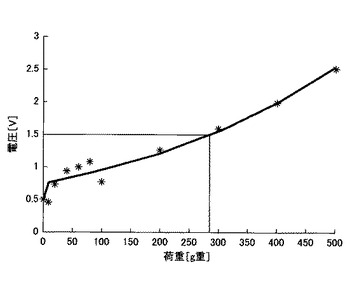
【図8】図8は、第1の調整方法に用いる電圧−荷重特性を示す図である。
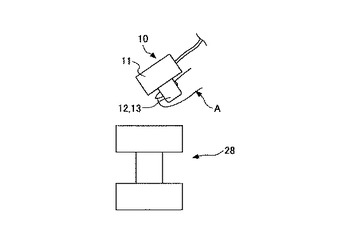
【図9】図9は、本発明の一実施形態である動作検出センサに対する第2のキャリブレーション処理を説明するための図である。
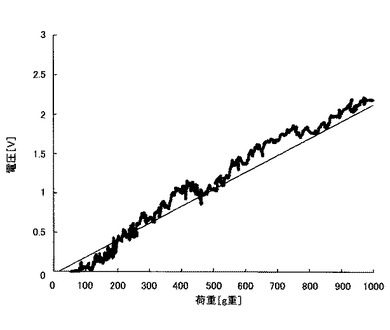
【図10】図10は、第2の調整方法に用いる電圧−荷重特性を示す図である。
【発明を実施するための形態】
【0014】
次に、本発明の実施の形態について図面と共に説明する。
【0015】
図1乃至図3は、本発明の一実施形態である動作検出センサを示している。図1は動作検出センサ10の断面図(図2(A)におけるD−D線に沿う断面図)であり、図2は動作検出センサ10の平面図、正面図、右側面図であり、図3は動作検出センサ10を指Aに装着した状態を示している。
【0016】
本実施形態に係る動作検出センサ10は、図3に示すように人(被験者)の指Aを被検査体とし、この被検査体である指Aの動作を検出する機能を奏するものである。しかしながら、本願発明に係る動作検出センサを適用しうる被検査体は指Aに限定されるものではなく、人の足や手、また人以外においても動作時に変形を伴うものに対して広く適用が可能なものである。
【0017】
本実施形態に係る動作検出センサ10は、大略するとベース部材11、第1の検出片12、第2の検出片13、第1の検出素子14、第2の検出素子15、第1の調整ねじ18、及び第2の調整ねじ19等を有した構成とされている。
【0018】
基部となるベース部材11はアルミニウム等の金属よりなり、略直方体形状を有している。このベース部材11の下部面(Z1方向側面)には、凹部20が形成されている。また、凹部20の上面部には図中矢印Y1,Y2方向に延在するよう装着溝24,25が形成されている。更に、ベース部材11には、Z1,Z2方向に貫通する第1及び第2のねじ孔21,22が形成されている。なお、ベース部材11の材質は金属に限定されるものではなく、樹脂によりベース部材11を形成することも可能である。
【0019】
凹部20に形成された装着溝23には配線ケーブル16が、また装着溝24には配線ケーブル17が配設されている。前記のように、装着溝23,24は矢印Y1,Y2方向に延在しており、その内部に配線ケーブル16,17は係止されている。
【0020】
配線ケーブル16,17はフレキシブル配線板により構成されており、それぞれの内部には一対の配線パターン(図示せず)が形成されている。この配線ケーブル16,17のY1方向側はベース部材11からY1方向に向け延出し、図示しない動作検出装置に接続されている。一方、配線ケーブル16のY1方向側の端部には第1の検出素子14が、また配線ケーブル17のY1方向の端部には第2の検出素子15が配設されている。
【0021】
本実施形態では、第1及び第2の検出素子14,15として、接触式センサである感圧導電性エラストマーセンサ(以下、感圧ゴムという)を用いている。この感圧ゴムとしては、イナバゴム株式会社製の型番:SF−3−LTを用いることができる。
【0022】
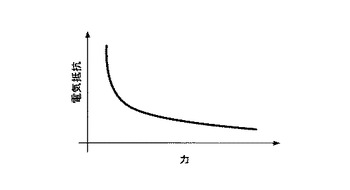
感圧ゴムはゴム材料に導電材を混ぜた構成を有し、力を印加することにより電気抵抗が下がる特性を示すゴムである。図4は、感圧ゴムの印加する力と電気抵抗の関係を示す図である。同図に示すように、力が印加されていない状態では感圧ゴムの電気抵抗は大きく、感圧ゴムに力が印加された状態では感圧ゴムの電気抵抗は小さくなる。
【0023】
第1の検出素子14の上面(Z2方向側の面)は配線ケーブル16に固定され、また第2の検出素子15の上面は配線ケーブル17に固定される。この際、各検出素子14,15は、配線ケーブル16,17に形成された一対の配線パターンに電気的に接続するよう固定される。よって、第1の検出素子14に生じた電気抵抗変化は配線ケーブル16を介して動作検出装置に送られ、また第2の検出素子15に発生した電気抵抗変化は配線ケーブル17を介して動作検出装置に送られる。
【0024】
上記構成とすることにより、本実施形態では第1及び第2の検出素子14,15がベース部材11に形成された凹部20の内部に配設された構成となる。このため、各検出素子14,15をベース部材11により保護することができ、外乱影響(例えば、温度や不測の外力の印加等)が各検出素子14,15の検出結果に重畳してしまうことを防止できる。よって、ベース部材11を設けることにより、各検出素子14,15の検出精度を高めることができる。
【0025】
また、第1の検出素子14の下面(Z1方向側の面)には第1の検出片12が固定され、第2の検出素子15の下面には第2の検出片13が固定される。本実施形態では、第1の検出片12と第2の検出片13は一体的な構成とした例を示しているが、第1の検出片12と第2の検出片13は分離された構成としてもよい。
【0026】
第1及び第2の検出片12,13は、剛性を有した金属材により形成されている。この第1の検出片12は、Z1方向に延出する検出部12aと、X2方向に延出する素子接続部12bとにより構成されている。また第2の検出片13は、Z1方向に延出する検出部13aと、X2方向に延出する素子接続部13bとにより構成されている。
【0027】
各検出部12a,13aは、ベース部材11の下面より下方に向け延出するよう設定されている。また、各検出部12a,13aのZ1,Z2方向の延出長さ、及びX1,X2方向の離間距離は、図1及び図3に示すように、指A(指先)の側部を挟持しうる長さに設定されている。
【0028】
一方、素子接続部12bは第1の検出素子14の下面に固定され、素子接続部13bは第2の検出素子15の下面に固定される。従って、検出部12aが図1に矢印B1で示す方向に変位した場合、第1の検出素子14は素子接続部12bにより押圧され(力が印加され)、よって第1の検出素子14の電気抵抗は小さくなる。同様に、検出部13aが図1に矢印B2で示す方向に変位した場合、第2の検出素子15は素子接続部13bにより押圧され(力が印加され)、よって第2の検出素子15の電気抵抗は小さくなる。
【0029】
このように、第1及び第2の検出片12,13の変位は第1及び第2の検出素子14,15により検出され、電気信号として動作検出装置に送られる。本実施形態では、予め配線ケーブル16,17に基準電圧がかけられており、動作検出装置は第1及び第2の検出素子14,15の圧力に応じた電気抵抗の変化を電圧変化として検知する。
【0030】
本実施形態では、検出部12aと検出部13aが指Aの幅だけ離間配置されると共に、第1の検出片12に発生する変形は素子接続部12bを介して第1の検出素子14が検出し、第2の検出片13に発生する変形は素子接続部13bを介して第2の検出素子15が検出する構成とされている。このように本実施形態では、後述するように動作検出センサ10を指Aに装着し、指Aを動作させた際に各検出片12,13に発生する変形を、第1の検出片12と第2の検出片13で別個に第1の検出素子14と第2の検出素子15により検出することができる。
【0031】
第1の調整ねじ18は、ベース部材11に形成された第1のねじ孔21に装着される。また、第2の調整ねじ19は、ベース部材11に形成された第2のねじ孔22に装着される。第1のねじ孔21の形成位置は第1の検出素子14と対向する位置に設定されており、第2のねじ孔22の形成位置は第2の検出素子15と対向する位置に設定されている。
【0032】
よって、各調整ねじ18,19を螺進させることにより、検出素子14,15には押圧力が印加され、逆に各調整ねじ18,19を螺退させることにより検出素子14,15に印加される押圧力は低下する。これにより、第1及び第2の検出素子14,15に対する微調整を行うことが可能となり、左右の検出素子14,15のバランス調整や、各検出片12,13のベース部材11に対する取り付け誤差等の除去を行うことができ、動作検出センサ10による動作検出の精度を高めることができる。
【0033】
次に、上記構成とされた動作検出センサ10の動作について説明する。
【0034】
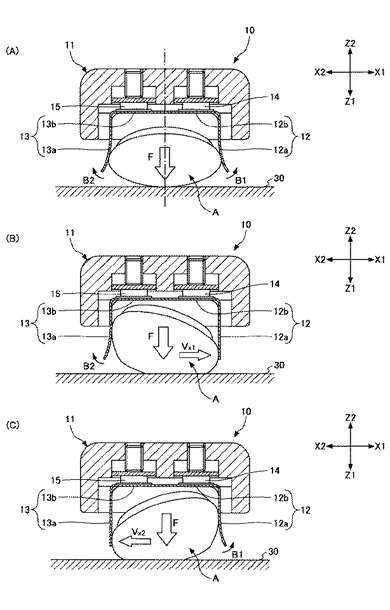
図5は、動作検出センサ10の動作を説明するための図である。前記ように動作検出センサ10は指Aに装着されて使用される(図1及び図3参照)。図5(A)は、動作検出センサ10を装着した状態で、指Aを使用感を測定しようとする物(以下、検査対象物30という)に押し付けた状態を示している。なお、ここでの検査対象物30は、前記した化粧道具等に相当する。
【0035】
指Aを検査対象物30に矢印F方向に押し付けることにより、図9(A)に示すように指Aは図中矢印X1,X2方向に広がるよう変形する。このように指Aが変形することにより、指Aを両側から把持している第1及び第2の検出片12,13も変形する。
【0036】
具体的には、第1の検出片12の検出部12aは図9(A)に矢印B1で示す方向に変形し、第2の検出片13の検出部13aは同図に矢印B2で示す方向に変形する。この際、指Aは検査対象物30に対して垂直方向に押圧されるため、指Aはその中心位置(図中、一点鎖線で示す)に対してX1,X2方向に略対称に広がる。よって、検出部12aの矢印B1方向の変位量、及び検出部13aの矢印B2方向の変位量は略等しくなり、第1及び第2の検出素子14,15の電気抵抗変化は略等しくなる。
【0037】
これに対して図5(B)に示すように、指Aが検査対象物30に矢印F方向に押圧されると共に矢印VX1方向に移動させた場合を想定すると、指Aは同図に示すように矢印X2方向側が膨れるような変形し、これに伴い検出部12aの変位量に対して検出部13aの変位量は大きくなる。従って、第2の検出素子15の電気抵抗の値は、第1の検出素子14の電気抵抗の値より小さくなる。
【0038】
また逆に、図5(C)に示すように指Aが検査対象物30に矢印F方向に押圧されると共に矢印VX2方向に移動させた場合には、指Aは同図に示すように矢印X1方向側が膨れるような変形し、これに伴い検出部13aの変位量に対して検出部12aの変位量は大きくなる。従って、第1の検出素子14の電気抵抗の値は、第2の検出素子15の電気抵抗の値より小さくなる。
【0039】
本実施形態に係る動作検出センサ10は、指Aの両側に位置する第1の検出片12と第2の検出片13の変位を、それぞれ独立して第1の検出素子14及び第2の検出素子15により検出する構成している。このため、図9(A)に示す指Aの検査対象物30に対する垂直方向に対する押圧動作、図9(B)に示す指Aの検査対象物30に対する矢印VX1方向の移動動作、及び図9(C)に示す指Aの検査対象物30に対する矢印VX2方向の移動動作をそれぞれ検出することができる。
【0040】
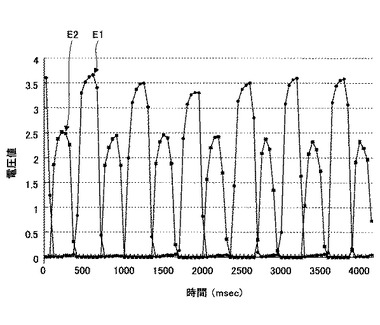
図6は、図5(A)に示す状態を中心として、指AをVX1方向とVX2方向に交互に移動させた時、動作検出センサ10から得られた検出信号に基づき動作検出装置が生成した電圧値−時間特性を示している。同図において、横軸は時間を示し、縦軸は電圧値を示している。
【0041】
指AをVX1方向とVX2方向に交互に移動させた時の電圧特性は、指AをVX1方向に移動した時の電圧信号E2と、指AをVX2方向に移動した時の電圧信号E1とが、交互に繰り返し現れる特性となる。なお、電圧信号E1と電圧信号E2とでピークとなる電圧値に差があるのは、被験者にとって外側に指Aを移動する場合と、内側に向けて指Aを移動させる場合で指Aを動作させる力に差異が発生することによると思われる。
【0042】
このように、本実施形態に係る動作検出センサ10によれば、被験者の指Aの動作を確実かつ高精度に検出することができる。
【0043】
また本実施形態に係る動作検出センサ10は、装着時において指Aの両側部を各検出片12,13で把持することにより装着されるため、指Aの腹の部分を検査対象物30に直接接触させることができる。このため、指Aが検査対象物30上を移動する際、被験者は指Aの腹の部分で検査対象物30の表面状態(例えば、ザラザラしている、滑らかである、ゴツゴツしている等)を直接感じ得ることができる。
【0044】
このように、本実施形態に係る動作検出センサ10は、指Aの動作と共に、その動作を行った時に指Aの腹部分で感じる感触を同時に検出することができる。よって検査対象物30を化粧道具等に置き換えた場合を想定すると、動作検出センサ10を用いることにより、化粧道具等を使用する際の感触と、その時の指Aの動作とを同時に検知することが可能となる。よって、化粧道具等の使用感を定量的かつ高精度に検出することができる。
【0045】
ところで、上記した説明では動作検出装置が各検出素子14,15の電気抵抗変化を電圧変化として検出する構成を例に挙げて説明したが、各検出素子14,15の電気抵抗変化を指Aに印加される荷重として検出することも可能である。この場合、動作検出センサ10のキャリブレーション処理(較正処理)が必要となる。以下、このキャリブレーション処理について説明する。
【0046】
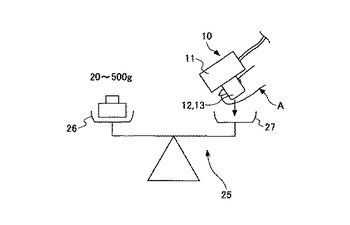
図7及び図8は、第1のキャリブレーション処理を説明するための図である。この第1のキャリブレーション処理では、図7に示すように上皿天秤25を用意し、この上皿天秤25の一方の皿26に既知の錘を乗せる。その上で、他方の皿27を動作検出センサ10を装着した指Aで押圧し、各皿26,27が平衡状態となるようにする。この時の動作検出センサ10から出力される電気信号に基づき求められる電圧値と、皿26に乗せた既知の錘の重さとを関連付けて記録する。
【0047】
この処理を種々の重さの錘に対して実施することにより、図8に示す特性図を得ることができる。同図は、横軸に錘の重さ(荷重)を取り、縦軸に動作検出センサ10からの出力値に基づきえられた電圧値を示している。
【0048】
この図8に示す電圧−荷重特性図を動作検出装置にマップとして格納しておくことにより、動作検出装置は動作検出センサ10から出力される電気信号に基づき求められる電圧値から、指Aに印加されている荷重を求めることが可能となる。具体的には、例えば動作検出センサ10から出力される電気信号に基づき求められる電圧値が1.5Vであった場合、図8より指Aに印加されている荷重は290g重であると検出することができる。
【0049】
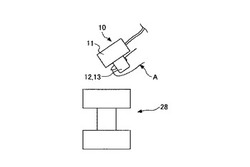
また、図9及び図10は、第2のキャリブレーション処理を説明するための図である。この第2のキャリブレーション処理では、圧力センサ28を用意する。そして、図8に示すように動作検出センサ10を装着した指Aで圧力センサ28を押圧する。この時、圧力センサ28は押圧力に対応した荷重を表示する。この時の動作検出センサ10から出力される電気信号に基づき求められる電圧値と、圧力センサ28に表示される荷重とを関連付けて記録する。
【0050】
この処理を、指Aの圧力センサ28を押圧する力を変化させることにより種々の押圧力で実施することにより、図10に示す特性図を得ることができる。同図も横軸に錘の重さ(荷重)を取り、縦軸に動作検出センサ10からの出力値に基づきえられた電圧値を示している。
【0051】
上記のようにして求められた図10に示す電圧−荷重特性図を動作検出装置に格納しておくことによっても、動作検出装置は動作検出センサ10から出力される電気信号に基づき指Aに印加されている荷重を求めることが可能となる。
【0052】
上記のように実施されるキャリブレーション処理は、動作検出センサ10を装着する装着者の指Aの固有の変形特性及び属性を含めた較正処理となるため、動作検出センサ10により検出される検出結果の精度を高めることができる。また上記の二つのキャリブレーション処理をプログラムとして図示しない動作検出装置(パーソナルコンピュータ等)に格納しておくことにより、複数種類の較正処理のうち、最も推定誤差の少ないものを装着者個人に合わせて採用する構成とすることも可能となり、これによっても検出精度の向上を図ることができる。
【0053】
以上、本発明の好ましい実施例について詳述したが、本発明は上記した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能なものである。
【0054】
具体的には、本実施形態では第1及び第2の検出素子14,15として圧電ゴムを使用した例を示したが、検出素子は圧電ゴムに限定されるものではなく、各種の接触式センサ及び非接触センサの適用が可能である。
【0055】
接触式センサとしては、電気抵抗式歪みゲージ、磁歪式歪みゲージ(ロードセル)、ピエゾ抵抗式歪みゲージ、光ファイバ式歪みセンサ、及び加速度センサ等の適用が可能である。また、非接触式センサとしては、フォトトランジスタによる反射光強度による計測、静電容量を計測する方法、感圧塗料等を利用した光学式歪み計測等の適用が可能である。
【符号の説明】
【0056】
10 動作検出センサ
11 ベース部材
12 第1の検出片
12a,13a 検出部
12b,13b 素子接続部
13 第2の検出片
14 第1の検出素子
15 第2の検出素子
18 第1の調整ねじ
19 第2の調整ねじ
21 第1のねじ孔
22 第2のねじ孔
23,24 装着溝
25 上皿天秤
28 圧力センサ
30 検査対象物
【技術分野】
【0001】
本発明は動作検出センサ及びそのキャリブレーション方法に係り、特に被検査体に装着して被検査体の動作を検出する動作検出センサ及びそのキャリブレーション方法に関する。
【背景技術】
【0002】
一般に、化粧を行う場合には種々の化粧品や化粧道具を用いる。化粧品の中には、化粧を行う人(以下、施術者という)が化粧品を直接把持して化粧を行うものがある(例えば、マスカラ,アイライナー等)。また化粧を行うに際し、施術者が化粧道具(リップブラシやチークブラシ等の各種ブラシ、メーキャップパフ、ファンデーションスポンジ、コットン等)を用いる場合もある。
【0003】
このように化粧を行う場合、施術者は化粧品や化粧道具(以下、総称して化粧道具等という)を手にとって使用することになる。従って化粧道具等は、施術者が直接把持した際の使用感を向上させることが重要となる。また、使用性の向上を客観的に判断できるように、化粧道具等の使用感は定量的に検出できることが望ましい。
【0004】
この化粧道具等の使用感を定量的に検出するには、化粧を行う際の指先の動作と、その動作を行った時に指先に感じる感触を検出することが必要となる。指先に感じる感触は、被験者(化粧道具等を使用する者)に対して官能検査を行うことにより得ることができる。これに対して指先の動作は、特許文献1に開示されているような動作検出センサを用いて検出することが可能である。この特許文献1に開示されたセンサでは、指の爪に歪みセンサを配置し、指の動作時に爪に発生する歪みを検出することにより指先の動作を検知する構成とされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−265522号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された発明は、爪に直接センサを接着剤等を用いて貼着する構成であったため、取り扱いが不便であるという問題点があった。また、爪の大きさや剛性には個人差があり、被験者の爪の個人特性により検出結果が左右されるという問題点があった。
【0007】
更に、強い動作を行う場合には爪の歪みが確実に発生するため精度の高い動作検出が行えるが、化粧道具等を使用する時のような、あまり大きな力を必要としない動作の場合には爪に発生する歪が小さく、高精度の動作検出が行えないという問題点があった。
【0008】
本発明は上記の点に鑑みてなされたものであり、被検査体の動作力が小さい場合であっても高精度に動作検出を行いうる動作検出センサ及びそのキャリブレーション方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題は、第1の観点からは、
基部と、
該基部から延出すると共に被検査体と接触し、動作時に該被検査体に発生する変形に伴い変位する前記第1の検出片と、
前記基部の前記第1の検出片の延出位置と異なる位置から延出すると共に被検査体と接触し、動作時に前記被検査体に発生する変形に伴い変位する前記第2の検出片と、
前記基部に配設されており、前記第1の検出片の変位を検出する第1の検出素子と、
前記基部に配設されており、前記第2の検出片の変位を検出する第2の検出素子とを有し、
前記第1及び第2の検出片が前記被検査体を挟持することにより前記被検査体に装着されることを特徴とする動作検出センサにより解決することができる。
【0010】
また上記の課題は、他の観点からは、
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
天秤の一方の皿に既知の重さを有した錘を乗せる第1のステップと、
前記天秤の他方の皿を前記動作検出センサを装着した被検査体で押圧し、前記各皿を均衡状態とさせる第2のステップと、
該均衡状態において前記動作検出センサから出力される電気信号に基づき求められる電圧値を検出する第3のステップと、
前記錘の重さと前記電圧値とを関連付けて記録する第4のステップとを有し、
前記第1乃至第4のステップを前記錘の重さを変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法により解決することができる。
【0011】
また上記の課題は、他の観点からは、
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
圧力センサを前記動作検出センサを装着した被検査体で押圧し、該圧力センサで検出される荷重と、前記動作検出センサから出力される電気信号に基づき求められる電圧値とを検出する第1のステップと、
前記圧力センサで検出される荷重と前記電圧値とを関連付けて記録する第2のステップとを有し、
前記第1及び第2のステップを前記圧力センサを押圧する力を変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法により解決することができる。
【発明の効果】
【0012】
開示の動作検出センサによれば、第1及び第2の検出片の延出位置が異なっており、また動作時に被検査体に発生する変形に伴い変位する第1及び第2の検出片を基部に設けた第1及び第2の検出素子で個別に検出するため、被検査体の動作を確実に検出することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の一実施形態である動作検出センサの断面図である。
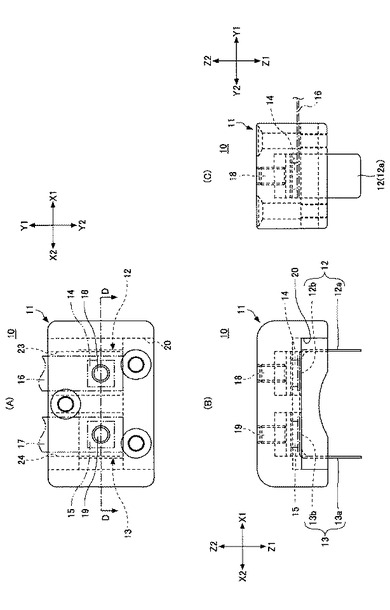
【図2】図2(A)は本発明の一実施形態である動作検出センサの平面図、図2(B)は本発明の一実施形態である動作検出センサの正面図、図2(C)は本発明の一実施形態である動作検出センサの右側面図である。
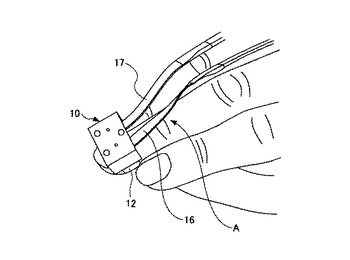
【図3】図3は、動作検出センサを指に装着した状態を示す図である。
【図4】図4は、力を作用させた場合の感圧ゴムの力と電気抵抗との関係を示す図である。
【図5】図5は本発明の一実施形態である動作検出センサを用いた動作検出処理を示し、図5(A)は指を押圧動作した時の図、図5(B)は指をX1方向に移動動作させた時の図、図5(C)は指をX2方向に移動動作した時の図である。
【図6】図6は、指をX1,X2方向に交互に移動動作した時の動作検出センサからの出力を示す図である。
【図7】図7は、本発明の一実施形態である動作検出センサに対する第1のキャリブレーション処理を説明するための図である。
【図8】図8は、第1の調整方法に用いる電圧−荷重特性を示す図である。
【図9】図9は、本発明の一実施形態である動作検出センサに対する第2のキャリブレーション処理を説明するための図である。
【図10】図10は、第2の調整方法に用いる電圧−荷重特性を示す図である。
【発明を実施するための形態】
【0014】
次に、本発明の実施の形態について図面と共に説明する。
【0015】
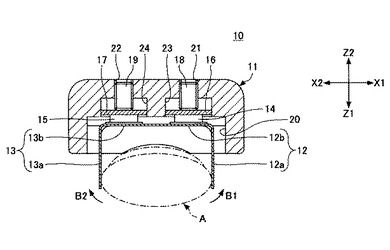
図1乃至図3は、本発明の一実施形態である動作検出センサを示している。図1は動作検出センサ10の断面図(図2(A)におけるD−D線に沿う断面図)であり、図2は動作検出センサ10の平面図、正面図、右側面図であり、図3は動作検出センサ10を指Aに装着した状態を示している。
【0016】
本実施形態に係る動作検出センサ10は、図3に示すように人(被験者)の指Aを被検査体とし、この被検査体である指Aの動作を検出する機能を奏するものである。しかしながら、本願発明に係る動作検出センサを適用しうる被検査体は指Aに限定されるものではなく、人の足や手、また人以外においても動作時に変形を伴うものに対して広く適用が可能なものである。
【0017】
本実施形態に係る動作検出センサ10は、大略するとベース部材11、第1の検出片12、第2の検出片13、第1の検出素子14、第2の検出素子15、第1の調整ねじ18、及び第2の調整ねじ19等を有した構成とされている。
【0018】
基部となるベース部材11はアルミニウム等の金属よりなり、略直方体形状を有している。このベース部材11の下部面(Z1方向側面)には、凹部20が形成されている。また、凹部20の上面部には図中矢印Y1,Y2方向に延在するよう装着溝24,25が形成されている。更に、ベース部材11には、Z1,Z2方向に貫通する第1及び第2のねじ孔21,22が形成されている。なお、ベース部材11の材質は金属に限定されるものではなく、樹脂によりベース部材11を形成することも可能である。
【0019】
凹部20に形成された装着溝23には配線ケーブル16が、また装着溝24には配線ケーブル17が配設されている。前記のように、装着溝23,24は矢印Y1,Y2方向に延在しており、その内部に配線ケーブル16,17は係止されている。
【0020】
配線ケーブル16,17はフレキシブル配線板により構成されており、それぞれの内部には一対の配線パターン(図示せず)が形成されている。この配線ケーブル16,17のY1方向側はベース部材11からY1方向に向け延出し、図示しない動作検出装置に接続されている。一方、配線ケーブル16のY1方向側の端部には第1の検出素子14が、また配線ケーブル17のY1方向の端部には第2の検出素子15が配設されている。
【0021】
本実施形態では、第1及び第2の検出素子14,15として、接触式センサである感圧導電性エラストマーセンサ(以下、感圧ゴムという)を用いている。この感圧ゴムとしては、イナバゴム株式会社製の型番:SF−3−LTを用いることができる。
【0022】
感圧ゴムはゴム材料に導電材を混ぜた構成を有し、力を印加することにより電気抵抗が下がる特性を示すゴムである。図4は、感圧ゴムの印加する力と電気抵抗の関係を示す図である。同図に示すように、力が印加されていない状態では感圧ゴムの電気抵抗は大きく、感圧ゴムに力が印加された状態では感圧ゴムの電気抵抗は小さくなる。
【0023】
第1の検出素子14の上面(Z2方向側の面)は配線ケーブル16に固定され、また第2の検出素子15の上面は配線ケーブル17に固定される。この際、各検出素子14,15は、配線ケーブル16,17に形成された一対の配線パターンに電気的に接続するよう固定される。よって、第1の検出素子14に生じた電気抵抗変化は配線ケーブル16を介して動作検出装置に送られ、また第2の検出素子15に発生した電気抵抗変化は配線ケーブル17を介して動作検出装置に送られる。
【0024】
上記構成とすることにより、本実施形態では第1及び第2の検出素子14,15がベース部材11に形成された凹部20の内部に配設された構成となる。このため、各検出素子14,15をベース部材11により保護することができ、外乱影響(例えば、温度や不測の外力の印加等)が各検出素子14,15の検出結果に重畳してしまうことを防止できる。よって、ベース部材11を設けることにより、各検出素子14,15の検出精度を高めることができる。
【0025】
また、第1の検出素子14の下面(Z1方向側の面)には第1の検出片12が固定され、第2の検出素子15の下面には第2の検出片13が固定される。本実施形態では、第1の検出片12と第2の検出片13は一体的な構成とした例を示しているが、第1の検出片12と第2の検出片13は分離された構成としてもよい。
【0026】
第1及び第2の検出片12,13は、剛性を有した金属材により形成されている。この第1の検出片12は、Z1方向に延出する検出部12aと、X2方向に延出する素子接続部12bとにより構成されている。また第2の検出片13は、Z1方向に延出する検出部13aと、X2方向に延出する素子接続部13bとにより構成されている。
【0027】
各検出部12a,13aは、ベース部材11の下面より下方に向け延出するよう設定されている。また、各検出部12a,13aのZ1,Z2方向の延出長さ、及びX1,X2方向の離間距離は、図1及び図3に示すように、指A(指先)の側部を挟持しうる長さに設定されている。
【0028】
一方、素子接続部12bは第1の検出素子14の下面に固定され、素子接続部13bは第2の検出素子15の下面に固定される。従って、検出部12aが図1に矢印B1で示す方向に変位した場合、第1の検出素子14は素子接続部12bにより押圧され(力が印加され)、よって第1の検出素子14の電気抵抗は小さくなる。同様に、検出部13aが図1に矢印B2で示す方向に変位した場合、第2の検出素子15は素子接続部13bにより押圧され(力が印加され)、よって第2の検出素子15の電気抵抗は小さくなる。
【0029】
このように、第1及び第2の検出片12,13の変位は第1及び第2の検出素子14,15により検出され、電気信号として動作検出装置に送られる。本実施形態では、予め配線ケーブル16,17に基準電圧がかけられており、動作検出装置は第1及び第2の検出素子14,15の圧力に応じた電気抵抗の変化を電圧変化として検知する。
【0030】
本実施形態では、検出部12aと検出部13aが指Aの幅だけ離間配置されると共に、第1の検出片12に発生する変形は素子接続部12bを介して第1の検出素子14が検出し、第2の検出片13に発生する変形は素子接続部13bを介して第2の検出素子15が検出する構成とされている。このように本実施形態では、後述するように動作検出センサ10を指Aに装着し、指Aを動作させた際に各検出片12,13に発生する変形を、第1の検出片12と第2の検出片13で別個に第1の検出素子14と第2の検出素子15により検出することができる。
【0031】
第1の調整ねじ18は、ベース部材11に形成された第1のねじ孔21に装着される。また、第2の調整ねじ19は、ベース部材11に形成された第2のねじ孔22に装着される。第1のねじ孔21の形成位置は第1の検出素子14と対向する位置に設定されており、第2のねじ孔22の形成位置は第2の検出素子15と対向する位置に設定されている。
【0032】
よって、各調整ねじ18,19を螺進させることにより、検出素子14,15には押圧力が印加され、逆に各調整ねじ18,19を螺退させることにより検出素子14,15に印加される押圧力は低下する。これにより、第1及び第2の検出素子14,15に対する微調整を行うことが可能となり、左右の検出素子14,15のバランス調整や、各検出片12,13のベース部材11に対する取り付け誤差等の除去を行うことができ、動作検出センサ10による動作検出の精度を高めることができる。
【0033】
次に、上記構成とされた動作検出センサ10の動作について説明する。
【0034】
図5は、動作検出センサ10の動作を説明するための図である。前記ように動作検出センサ10は指Aに装着されて使用される(図1及び図3参照)。図5(A)は、動作検出センサ10を装着した状態で、指Aを使用感を測定しようとする物(以下、検査対象物30という)に押し付けた状態を示している。なお、ここでの検査対象物30は、前記した化粧道具等に相当する。
【0035】
指Aを検査対象物30に矢印F方向に押し付けることにより、図9(A)に示すように指Aは図中矢印X1,X2方向に広がるよう変形する。このように指Aが変形することにより、指Aを両側から把持している第1及び第2の検出片12,13も変形する。
【0036】
具体的には、第1の検出片12の検出部12aは図9(A)に矢印B1で示す方向に変形し、第2の検出片13の検出部13aは同図に矢印B2で示す方向に変形する。この際、指Aは検査対象物30に対して垂直方向に押圧されるため、指Aはその中心位置(図中、一点鎖線で示す)に対してX1,X2方向に略対称に広がる。よって、検出部12aの矢印B1方向の変位量、及び検出部13aの矢印B2方向の変位量は略等しくなり、第1及び第2の検出素子14,15の電気抵抗変化は略等しくなる。
【0037】
これに対して図5(B)に示すように、指Aが検査対象物30に矢印F方向に押圧されると共に矢印VX1方向に移動させた場合を想定すると、指Aは同図に示すように矢印X2方向側が膨れるような変形し、これに伴い検出部12aの変位量に対して検出部13aの変位量は大きくなる。従って、第2の検出素子15の電気抵抗の値は、第1の検出素子14の電気抵抗の値より小さくなる。
【0038】
また逆に、図5(C)に示すように指Aが検査対象物30に矢印F方向に押圧されると共に矢印VX2方向に移動させた場合には、指Aは同図に示すように矢印X1方向側が膨れるような変形し、これに伴い検出部13aの変位量に対して検出部12aの変位量は大きくなる。従って、第1の検出素子14の電気抵抗の値は、第2の検出素子15の電気抵抗の値より小さくなる。
【0039】
本実施形態に係る動作検出センサ10は、指Aの両側に位置する第1の検出片12と第2の検出片13の変位を、それぞれ独立して第1の検出素子14及び第2の検出素子15により検出する構成している。このため、図9(A)に示す指Aの検査対象物30に対する垂直方向に対する押圧動作、図9(B)に示す指Aの検査対象物30に対する矢印VX1方向の移動動作、及び図9(C)に示す指Aの検査対象物30に対する矢印VX2方向の移動動作をそれぞれ検出することができる。
【0040】
図6は、図5(A)に示す状態を中心として、指AをVX1方向とVX2方向に交互に移動させた時、動作検出センサ10から得られた検出信号に基づき動作検出装置が生成した電圧値−時間特性を示している。同図において、横軸は時間を示し、縦軸は電圧値を示している。
【0041】
指AをVX1方向とVX2方向に交互に移動させた時の電圧特性は、指AをVX1方向に移動した時の電圧信号E2と、指AをVX2方向に移動した時の電圧信号E1とが、交互に繰り返し現れる特性となる。なお、電圧信号E1と電圧信号E2とでピークとなる電圧値に差があるのは、被験者にとって外側に指Aを移動する場合と、内側に向けて指Aを移動させる場合で指Aを動作させる力に差異が発生することによると思われる。
【0042】
このように、本実施形態に係る動作検出センサ10によれば、被験者の指Aの動作を確実かつ高精度に検出することができる。
【0043】
また本実施形態に係る動作検出センサ10は、装着時において指Aの両側部を各検出片12,13で把持することにより装着されるため、指Aの腹の部分を検査対象物30に直接接触させることができる。このため、指Aが検査対象物30上を移動する際、被験者は指Aの腹の部分で検査対象物30の表面状態(例えば、ザラザラしている、滑らかである、ゴツゴツしている等)を直接感じ得ることができる。
【0044】
このように、本実施形態に係る動作検出センサ10は、指Aの動作と共に、その動作を行った時に指Aの腹部分で感じる感触を同時に検出することができる。よって検査対象物30を化粧道具等に置き換えた場合を想定すると、動作検出センサ10を用いることにより、化粧道具等を使用する際の感触と、その時の指Aの動作とを同時に検知することが可能となる。よって、化粧道具等の使用感を定量的かつ高精度に検出することができる。
【0045】
ところで、上記した説明では動作検出装置が各検出素子14,15の電気抵抗変化を電圧変化として検出する構成を例に挙げて説明したが、各検出素子14,15の電気抵抗変化を指Aに印加される荷重として検出することも可能である。この場合、動作検出センサ10のキャリブレーション処理(較正処理)が必要となる。以下、このキャリブレーション処理について説明する。
【0046】
図7及び図8は、第1のキャリブレーション処理を説明するための図である。この第1のキャリブレーション処理では、図7に示すように上皿天秤25を用意し、この上皿天秤25の一方の皿26に既知の錘を乗せる。その上で、他方の皿27を動作検出センサ10を装着した指Aで押圧し、各皿26,27が平衡状態となるようにする。この時の動作検出センサ10から出力される電気信号に基づき求められる電圧値と、皿26に乗せた既知の錘の重さとを関連付けて記録する。
【0047】
この処理を種々の重さの錘に対して実施することにより、図8に示す特性図を得ることができる。同図は、横軸に錘の重さ(荷重)を取り、縦軸に動作検出センサ10からの出力値に基づきえられた電圧値を示している。
【0048】
この図8に示す電圧−荷重特性図を動作検出装置にマップとして格納しておくことにより、動作検出装置は動作検出センサ10から出力される電気信号に基づき求められる電圧値から、指Aに印加されている荷重を求めることが可能となる。具体的には、例えば動作検出センサ10から出力される電気信号に基づき求められる電圧値が1.5Vであった場合、図8より指Aに印加されている荷重は290g重であると検出することができる。
【0049】
また、図9及び図10は、第2のキャリブレーション処理を説明するための図である。この第2のキャリブレーション処理では、圧力センサ28を用意する。そして、図8に示すように動作検出センサ10を装着した指Aで圧力センサ28を押圧する。この時、圧力センサ28は押圧力に対応した荷重を表示する。この時の動作検出センサ10から出力される電気信号に基づき求められる電圧値と、圧力センサ28に表示される荷重とを関連付けて記録する。
【0050】
この処理を、指Aの圧力センサ28を押圧する力を変化させることにより種々の押圧力で実施することにより、図10に示す特性図を得ることができる。同図も横軸に錘の重さ(荷重)を取り、縦軸に動作検出センサ10からの出力値に基づきえられた電圧値を示している。
【0051】
上記のようにして求められた図10に示す電圧−荷重特性図を動作検出装置に格納しておくことによっても、動作検出装置は動作検出センサ10から出力される電気信号に基づき指Aに印加されている荷重を求めることが可能となる。
【0052】
上記のように実施されるキャリブレーション処理は、動作検出センサ10を装着する装着者の指Aの固有の変形特性及び属性を含めた較正処理となるため、動作検出センサ10により検出される検出結果の精度を高めることができる。また上記の二つのキャリブレーション処理をプログラムとして図示しない動作検出装置(パーソナルコンピュータ等)に格納しておくことにより、複数種類の較正処理のうち、最も推定誤差の少ないものを装着者個人に合わせて採用する構成とすることも可能となり、これによっても検出精度の向上を図ることができる。
【0053】
以上、本発明の好ましい実施例について詳述したが、本発明は上記した特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能なものである。
【0054】
具体的には、本実施形態では第1及び第2の検出素子14,15として圧電ゴムを使用した例を示したが、検出素子は圧電ゴムに限定されるものではなく、各種の接触式センサ及び非接触センサの適用が可能である。
【0055】
接触式センサとしては、電気抵抗式歪みゲージ、磁歪式歪みゲージ(ロードセル)、ピエゾ抵抗式歪みゲージ、光ファイバ式歪みセンサ、及び加速度センサ等の適用が可能である。また、非接触式センサとしては、フォトトランジスタによる反射光強度による計測、静電容量を計測する方法、感圧塗料等を利用した光学式歪み計測等の適用が可能である。
【符号の説明】
【0056】
10 動作検出センサ
11 ベース部材
12 第1の検出片
12a,13a 検出部
12b,13b 素子接続部
13 第2の検出片
14 第1の検出素子
15 第2の検出素子
18 第1の調整ねじ
19 第2の調整ねじ
21 第1のねじ孔
22 第2のねじ孔
23,24 装着溝
25 上皿天秤
28 圧力センサ
30 検査対象物
【特許請求の範囲】
【請求項1】
基部と、
該基部から延出すると共に被検査体と接触し、動作時に該被検査体に発生する変形に伴い変位する前記第1の検出片と、
前記基部の前記第1の検出片の延出位置と異なる位置から延出すると共に被検査体と接触し、動作時に前記被検査体に発生する変形に伴い変位する前記第2の検出片と、
前記基部に配設されており、前記第1の検出片の変位を検出する第1の検出素子と、
前記基部に配設されており、前記第2の検出片の変位を検出する第2の検出素子とを有し、
前記第1及び第2の検出片が前記被検査体を挟持することにより前記被検査体に装着されることを特徴とする動作検出センサ。
【請求項2】
前記第1及び第2の検出素子に、微調整用の調整ねじを配設したことを特徴とする請求項1に記載の動作検出センサ。
【請求項3】
前記検出素子は、接触式センサであることを特徴とする請求項1又は2に記載の動作検出センサ。
【請求項4】
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
天秤の一方の皿に既知の重さを有した錘を乗せる第1のステップと、
前記天秤の他方の皿を前記動作検出センサを装着した被検査体で押圧し、前記各皿を均衡状態とさせる第2のステップと、
該均衡状態において前記動作検出センサから出力される電気信号に基づき求められる電圧値を検出する第3のステップと、
前記錘の重さと前記電圧値とを関連付けて記録する第4のステップとを有し、
前記第1乃至第4のステップを前記錘の重さを変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法。
【請求項5】
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
圧力センサを前記動作検出センサを装着した被検査体で押圧し、該圧力センサで検出される荷重と、前記動作検出センサから出力される電気信号に基づき求められる電圧値とを検出する第1のステップと、
前記圧力センサで検出される荷重と前記電圧値とを関連付けて記録する第2のステップとを有し、
前記第1及び第2のステップを前記圧力センサを押圧する力を変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法。
【請求項1】
基部と、
該基部から延出すると共に被検査体と接触し、動作時に該被検査体に発生する変形に伴い変位する前記第1の検出片と、
前記基部の前記第1の検出片の延出位置と異なる位置から延出すると共に被検査体と接触し、動作時に前記被検査体に発生する変形に伴い変位する前記第2の検出片と、
前記基部に配設されており、前記第1の検出片の変位を検出する第1の検出素子と、
前記基部に配設されており、前記第2の検出片の変位を検出する第2の検出素子とを有し、
前記第1及び第2の検出片が前記被検査体を挟持することにより前記被検査体に装着されることを特徴とする動作検出センサ。
【請求項2】
前記第1及び第2の検出素子に、微調整用の調整ねじを配設したことを特徴とする請求項1に記載の動作検出センサ。
【請求項3】
前記検出素子は、接触式センサであることを特徴とする請求項1又は2に記載の動作検出センサ。
【請求項4】
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
天秤の一方の皿に既知の重さを有した錘を乗せる第1のステップと、
前記天秤の他方の皿を前記動作検出センサを装着した被検査体で押圧し、前記各皿を均衡状態とさせる第2のステップと、
該均衡状態において前記動作検出センサから出力される電気信号に基づき求められる電圧値を検出する第3のステップと、
前記錘の重さと前記電圧値とを関連付けて記録する第4のステップとを有し、
前記第1乃至第4のステップを前記錘の重さを変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法。
【請求項5】
請求項1乃至3のいずれか一項に記載の動作検出センサのキャリブレーション方法であって、
圧力センサを前記動作検出センサを装着した被検査体で押圧し、該圧力センサで検出される荷重と、前記動作検出センサから出力される電気信号に基づき求められる電圧値とを検出する第1のステップと、
前記圧力センサで検出される荷重と前記電圧値とを関連付けて記録する第2のステップとを有し、
前記第1及び第2のステップを前記圧力センサを押圧する力を変えて繰り返し実施することを特徴とする動作検出センサのキャリブレーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−232165(P2011−232165A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−102580(P2010−102580)
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000001959)株式会社 資生堂 (1,748)
【出願人】(395009145)カトーテック株式会社 (8)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000001959)株式会社 資生堂 (1,748)
【出願人】(395009145)カトーテック株式会社 (8)
【Fターム(参考)】
[ Back to top ]