
動作検出装置、膝固定解除装置および下肢装具
【課題】簡便かつ軽量であって、使用者の意図しない動作をも考慮して膝関節の固定を解除できる、安全性の高い動作検出装置、膝固定解除装置および下肢装具を提供する。
【解決手段】本発明の動作検出装置1は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサー2と、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサー3と、爪先センサー2からの第1信号と踵センサー3からの第2信号とによって、足底の複数の接地パターンを検出する検出部5と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部6と、を備える。
【解決手段】本発明の動作検出装置1は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサー2と、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサー3と、爪先センサー2からの第1信号と踵センサー3からの第2信号とによって、足底の複数の接地パターンを検出する検出部5と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部6と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、下肢麻痺、特に膝関節の伸展が困難な者の歩行や動作を検出する動作検出装置、この動作検出装置を備える膝固定解除装置、およびこの膝固定解除装置を備える下肢麻痺者の歩行を補助する下肢装具に関する。
【背景技術】
【0002】
脳卒中やポリオなどによって、下肢(特に膝関節の伸展)に障害を有する下肢麻痺者は、装具や歩行補助装置などを用いて、歩行の支援を受ける。下肢麻痺者が膝関節機能(膝の伸展・屈曲)や足関節機能(足の背屈・底屈)に著しい障害を有する場合、大腿部から下腿部、さらには足底にかけて下肢を支持あるいは固定する長下肢装具が用いられる。
【0003】
このような長下肢装具は、装具使用者の膝関節を固定する膝継手機構を組み込むことが多い。下肢、特に膝関節機能に障害を有する使用者が、膝関節を固定しないで立位・歩行を行うと、立位が不安定となり歩行時に膝折れを生じる危険性がある。膝関節が固定されることで、障害側下肢で体を支えることができ、安心して歩くことができるようになる。
【0004】
一方で、長下肢装具によって膝関節が固定されていると、使用者は歩行遊脚期に膝が固定されているので伸び上がるか回すようにして下肢を振り出さざるを得なくなる。平坦な地面や床面を歩行する際に、意識して下肢を振り出すことは、使用者にとって精神的にも肉体的にも負担である。また、階段を昇降する場合には、膝関節が固定されていると不便である。
【0005】
このような状況下において、使用者の動作状態の検出により、歩行を補助する装置の動作が使用者の動作状態に最適化される技術が提案されている(例えば、特許文献1参照)。加えて、使用者の動作状態が検出されることで、必要に応じて膝関節の固定を解除したり膝関節の回動が制御されたりする技術が提案されている(例えば、特特許文献2、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−148637号公報
【特許文献2】実登3002320号公報
【特許文献3】特再公表2007−108551号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の技術においては、下肢装具は、足底の爪先側と踵側のそれぞれに設置された接地センサーからの接地状態の検出によって、使用者の動作状態を検出する。例えば、爪先側の接地センサーおよび踵側の接地センサーの双方が、地面から離れていることを検出する場合には、下肢装具は、膝関節の固定を解除する。このように、足底の爪先側と踵側とに設けられた接地センサーからの信号に基づいて、膝関節の固定を解除する技術は、従来においても用いられていた。
【0008】
特許文献1〜3のそれぞれの技術は、足底に設置された接地センサーによる接地状態の検出にその他の条件を加えた上で、使用者の動作状態を検出する。動作状態は、立脚状態(足を地面に接地させて立っている状態)、遊脚状態(足が地面から離れて歩行している状態)、およびこれらを更に細分化した状態を含む。このような使用者の動作状態の検出によって、使用者の歩行を補助する装置の動作が、使用者の実際の動作により近づけられるようになる。特許文献2、3のそれぞれの技術は、遊脚状態を検出する場合を、膝関節の固定を解除したり膝関節の回動を制御したりするタイミングとして用いる。膝関節の固定が解除されることによって、使用者が膝を折り曲げて歩行できるようになり、下肢装具を装着する使用者は、自然に近い歩行を行えるようになる。
【0009】
特許文献1の技術は、その他の条件として、遊脚の足の相対速度を用いる。遊脚の足の相対速度が所定値以上であれば遊脚状態(足が地面を離れて歩行している)が継続していると判断し、所定値未満であれば遊脚状態が終了すると判断する。
【0010】
特許文献2の技術は、その他の条件として、膝関節の屈曲角度を用いる。膝関節の屈曲角度を考慮することで、特許文献2の技術は、膝関節の固定を、より精密に解除する。
【0011】
特許文献3の技術は、その他の条件として、検出される荷重を用いる。荷重を検出することで、膝関節における回動が制御される。特許文献2および特許文献3の技術は、遊脚状態を検出することで、積極的に膝関節の固定を解除する。
【0012】
しかしながら、特許文献1〜特許文献3に開示される従来の技術は、使用者の意図していない動作を考慮せずに、足底が地面から離れると膝関節の固定を解除する。例えば、使用者が立ち話をしながら下肢装具を装着した足底を地面から離したりすることがある(体の重心位置を変えることで、足底が地面から離れる)。このような場合に膝関節の固定が解除されると、使用者は転倒する危険性にさらされる。あるいは、使用者が前傾姿勢になった場合にも足底が地面から離れることもある。この場合にも、膝関節の固定が解除されると、使用者はバランスを崩して危険にさらされる問題がある。
【0013】
このように、従来技術の下肢装具は、使用者の歩行をより容易とさせることを優先するため、使用者の意図しない動作においても膝関節の固定を解除して、使用者を不安や危険にさらす問題を有している。
【0014】
また、障害者の歩行パターンは健常者と異なることも多く、歩行パターンを考慮せずに、地面から足底が離れただけで膝関節の固定を解除することは、同様の危険を生じさせる。特許文献1〜特許文献3の技術は、速度や角度を考慮しているが、これらは、使用者の意図しない動作を考慮していないので、特許文献1〜特許文献3の技術も、使用者に不安や危険を感じさせる膝関節の固定解除を起こしてしまう。
【0015】
障害を有する使用者にとっては、歩きやすさを優先して膝関節の固定を解除することを優先するよりも、なるべく膝関節の固定を解除しないことを原則としつつ、必要最小限において膝関節の固定を解除することが重要である。
【0016】
また、特許文献1〜特許文献3などの従来技術は、膝関節の固定の解除のタイミングを検出するために、速度計や角度計測器などの様々な機器を用いる。このため、下肢装具が大型化して重くなってしまう。使用者は障害者であって、このような重い下肢装具を装着することは、非常な負担である問題もあった。
【0017】
本発明は、上記課題に鑑み、簡便かつ軽量であって、使用者の意図しない動作をも考慮して膝関節の固定を解除できる、安全性の高い動作検出装置、膝固定解除装置および下肢装具を提供することを目的とする。
【課題を解決するための手段】
【0018】
上記課題に鑑み、本発明の動作検出装置は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、爪先センサーからの第1信号と踵センサーからの第2信号とによって、足底の複数の接地パターンを検出する検出部と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、複数の動作パターンは、
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む。
【発明の効果】
【0019】
本発明の動作検出装置は、足底が地面から離れたことに加えて、使用者の動作を示す追加条件を考慮することで、障害者である使用者の動作をより正確に検出できる。特に、使用者の意図しない動作に基づいて遊脚状態と判断しないので、動作検出装置およびこれを用いた下肢装具は、使用者に不安や危険を与える膝関節の固定解除を引き起こさない。
【0020】
動作検出装置は、爪先側と踵側のいずれもが地面から離れている状態を遊脚状態として判断した上で、追加条件によって、実際の歩行中である遊脚状態(以下、「歩行遊脚状態」という)を、高い精度で検出できる。この結果、膝関節の固定は、必要最低限の場合のみ解除されるようになる。
【0021】
また、追加条件として、(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序が、適宜用いられることによって、動作検出装置は、高い精度で歩行遊脚状態を検出できる。
【0022】
これらの結果、本発明の動作検出装置、膝固定解除装置および下肢装具は、使用者に不安や危険を与えることなく、使用者の歩行や立位を補助できる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施の形態1における動作検出装置のブロック図である。
【図2】本発明の実施の形態1における接地パターンを説明する模式図である。
【図3】本発明の実施の形態1における検出部での検出に関するタイミングチャートである。
【図4】本発明の実施の形態1における第1条件に基づく場合の判定を説明する説明図である。
【図5】本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【図6】本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【図7】本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。
【図8】本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。
【図9】本発明の実施の形態1における第4条件にもとづく判定を説明する説明図である。
【図10】本発明の実施の形態2における動作検出装置のブロック図である。
【図11】本発明の実施の形態3における固定解除装置とその周辺要素の模式図である。
【図12】本発明の実施の形態4における下肢装具の写真である。
【図13】本発明の実施の形態4における下肢装具を装着した踵接地状態を示す写真である。
【図14】本発明の実施の形態4における下肢装具を装着した足底接地状態を示す写真である。
【図15】本発明の実施の形態4における下肢装具を装着した爪先接地状態を示している。
【図16】本発明の実施の形態4における下肢装具を装着した非歩行遊脚状態を示している。
【図17】本発明の実施の形態4における下肢装具を装着した歩行遊脚状態を示している。
【発明を実施するための形態】
【0024】
本発明の第1の発明に係る動作検出装置は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、爪先センサーからの第1信号と踵センサーからの第2信号とによって、足底の複数の接地パターンを検出する検出部と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、複数の動作パターンは、
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む。
【0025】
この構成により、動作検出装置は、使用者が足底を地面から離隔させているときであっても、歩行遊脚状態であるのか非歩行遊脚状態であるのかを高い精度で検出できる。
【0026】
本発明の第2の発明に係る動作検出装置では、第1の発明に加えて、検出部は、第1信号および第2信号のそれぞれが「接地」を示す場合には、接地パターンを、「足底接地状態」と判断し、第1信号が「離隔」を示し、第2信号が「接地」を示す場合には、接地パターンを、「踵接地状態」と判断し、第1信号が「接地」を示し、第2信号が「離隔」を示す場合には、接地パターンを、「爪先接地状態」と判断し、第1信号および第2信号のそれぞれが「離隔」を示す場合には、接地パターンを、「遊脚状態」と判断する。
【0027】
この構成により、検出部は、足底と地面との接触関係を確実に検出できる。この結果、歩行遊脚状態の基準となる接地パターンおよび動作パターンを正確に検出できる。
【0028】
本発明の第3の発明に係る動作検出装置では、第2の発明に加えて、判定部は、第1条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンが踵接地状態および足底接地状態のいずれかである場合には、該遊脚状態を非歩行遊脚状態として判定し、直前の接地パターンが爪先接地状態である場合には、該遊脚状態を、歩行遊脚状態として判定する。
【0029】
この構成により、動作検出装置は、下肢に障害のある使用者の歩行に至る動作を正確に検出できる。
【0030】
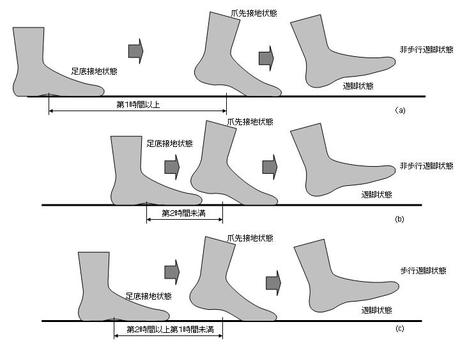
本発明の第4の発明に係る動作検出装置では、第2又は第3の発明に加えて、判定部は、第2条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0031】
この構成により、動作検出装置は、使用者が歩行状態であるのか、立ったまま足を上げたり、前のめりになったりなどの状態であるのかを、高い精度で判別できる。
【0032】
本発明の第5の発明に係る動作検出装置では、第2又は第3の発明に加えて、判定部は、第2条件に基づく場合では、判定対象となる遊脚状態の時間的に前の足底接地状態が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0033】
この構成により、動作検出装置は、使用者が歩行状態であるのか、立ったまま足を上げたり、前のめりになったりなどの状態であるのかを、高い精度で判別できる。
【0034】
本発明の第6の発明に係る動作検出装置では、第2から第5のいずれかの発明に加えて、判定部は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0035】
この構成により、動作検出装置は、使用者が歩行状態にあるのか、歩行状態ではないが突発的な状態となったのかを、高い精度で判別できる。
【0036】
本発明の第7の発明に係る動作検出装置では、第2から第5のいずれかの発明に加えて、判定部は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0037】
この構成により、動作検出装置は、使用者が歩行状態であるのか、歩行と異なる動作を行っているのかを、高い精度で判別できる。
【0038】
本発明の第8の発明に係る動作検出装置では、第2から第7のいずれかの発明に加えて、判定部は、第4条件に基づく場合では、判定対象となる遊脚状態と該遊脚状態の時間的に前における遊脚状態との期間の接地パターンが、踵接地状態、足底接地状態および爪先接地状態の順序である場合には、該遊脚状態を、非歩行遊脚状態であると判定し、判定対象となる遊脚状態と該遊脚状態の時間的に前における遊脚状態との期間の接地パターンが、足底接地状態および爪先接地状態の順序である場合には、該遊脚状態を、歩行遊脚状態であると判定する。
【0039】
この構成により、動作検出装置は、下肢に障害を有する使用者の接地パターンの出現順序に最適化して、歩行遊脚状態を検出できる。
【0040】
本発明の第9の発明に係る動作検出装置では、第1から第8のいずれかの発明に加えて、第1条件、第2条件、第3条件および第4条件のいずれを用いるかを選択する、選択部を更に備える。
【0041】
この構成により、動作検出装置は、使用者の特性や好みに合わせて、歩行遊脚状態を検出できる。
【0042】
本発明の第10の発明に係る動作検出装置では、第9の発明に加えて、選択部は、使用者によって制御される。
【0043】
この構成により、使用者は、みずからの好みや経験に合わせて、動作検出装置での検出特性を制御できる。
【0044】
本発明の第11の発明に係る動作検出装置では、第1から第10のいずれかの発明に加えて、爪先センサーおよび踵センサーの少なくとも一方は、圧力センサー、温度センサー、距離センサーおよび光センサーの少なくとも一つを備える。
【0045】
この構成により、動作検出装置は、高い精度で、接地パターンを検出できる。
【0046】
以下、図面を用いて、本発明の実施の形態について説明する。
【0047】
(実施の形態1)
【0048】
実施の形態1について説明する。
【0049】
(全体概要)
まず、実施の形態1における動作検出装置の概要を説明する。実施の形態1の動作検出装置は、人体の動作状態であって特に歩行中の細かな動作状態を検出する。実施の形態1の動作検出装置は、様々な用途に適用される。例えば、動作検出装置は、下肢の不自由な使用者が装着する下肢装具、下肢の不自由な使用者が装着する義足、下肢の不自由な使用者が用いる歩行器、ロボットの歩行機構、おもちゃの歩行機構などに用いられる。
【0050】
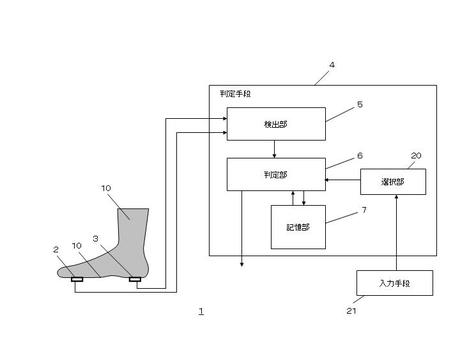
まず、図1を用いて、動作検出装置の概要を説明する。図1は、本発明の実施の形態1における動作検出装置のブロック図である。図1は、動作検出装置1とその周辺に存在する要素を合わせて示している。
【0051】
動作検出装置1は、爪先センサー2、踵センサー3、検出部5、判定部6を備える。また、判定部6が情報として用いる動作パターンを記憶する記憶部7を更に備える。なお、記憶部7は、図1では他の要素と独立した別の要素として示されているが、記憶部7は、判定部6の内部に備わる要素であっても良い。あるいは、判定部6が動作パターンそのものを記憶していてもよい。動作パターンは、必要に応じて予め記憶されていることもありえるので、記憶部7がこれを記憶しても良いものである。また、図1は、使用者の足10の一部も合わせて示している。
【0052】
爪先センサー2は、使用者の足底11の爪先側に設けられ、足底の爪先側の接地(爪先側が床面や地面に接触している状態を示す。以下も同じ)および離隔(爪先側が地面や床面から離れている状態を示す。以下も同じ)の少なくとも一方を検出する。爪先センサー2は、この検出した接地および離隔の少なくとも一方の結果を、第1信号として、検出部5に出力する。
【0053】
踵センサー3は、使用者の足底11の踵側に設けられ、足底の踵側の接地(踵側が床面や地面に接触している状態を示す。以下も同じ)および離隔(踵側が地面や床面から離れている状態を示す。以下も同じ)の少なくとも一方を検出する。踵センサー3は、この検出した接地および離隔の少なくとも一方の結果を、第2信号として、検出部5に出力する。
【0054】
検出部5は、爪先センサー2からの第1信号と踵センサー3からの第2信号とに基づいて、足底11の複数の接地パターンを検出する。複数の接地パターンは、足底11が、爪先側と踵側とを要素として、どのような状態で床面や地面と接地や離隔をしているかを示す。
【0055】
複数の接地パターンは、「接地」と「離隔」の2値を示す第1信号と第2信号から判断される。すなわち、検出部5は、2ビットの信号によって、4種類の接地パターンを検出する。
【0056】
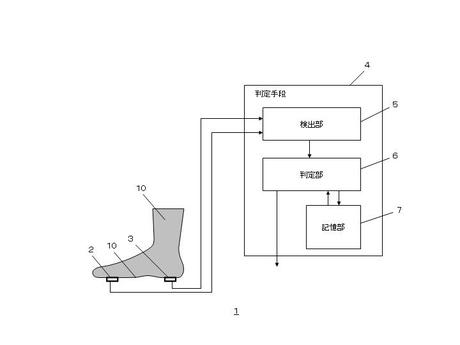
図2は、本発明の実施の形態1における接地パターンを説明する模式図である。図2は、足10の足底11の接地パターンを4種類の状態で示している。図2は、左から「遊脚状態」、「踵接地状態」、「足底接地状態」、「爪先接地状態」の4状態を示している。接地パターンは、これら4種類の状態のいずれかを示す。
【0057】
(遊脚状態)
第1信号および第2信号のそれぞれが「離隔」を示す場合(すなわち、爪先センサー2Aが離隔を示し、踵センサー3Aが離隔を示す場合)には、足底11Aは、床面12から完全に離隔している。このような足底11Aの状態を、検出部5は、「遊脚状態」として検出する。
【0058】
(踵接地状態)
第1信号が「離隔」を示し、第2信号が「接地」を示す場合(すなわち、爪先センサー2Bが離隔を示し、踵センサー3Bが接地を示す場合)には、足底11Bの踵のみが床面12に接地している。このような足底11Bの状態を、検出部5は、「踵接地状態」として検出する。
【0059】
(足底接地状態)
第1信号および第2信号のそれぞれが「接地」を示す場合(すなわち、爪先センサー2Cが接地を示し、踵センサー3Cが接地を示す場合)には、足底11Cの全体が床面12に接地している。このような足底11Cの状態を、検出部5は、「足底接地状態」として検出する。
【0060】
(爪先接地状態)
第1信号が「接地」を示し、第2信号が「離隔」を示す場合(すなわち、爪先センサー2Dが接地を示し、踵センサー3Dが離隔を示す場合)には、足底11Dの爪先側だけが床面12に接地している。このような足底11Dの状態を、検出部5は、「爪先接地状態」として検出する。
【0061】
このように、検出部5は、足底11の床面12に対する4種類の接地状態を、接地パターンとして検出して、検出結果を判定部6に出力する。
【0062】
判定部6は、検出部5が検出した複数の接地パターンの内、足底11が床面や地面から離隔している状態(以下、「遊脚状態」という)であることを判定する。更に、判定部6は、使用者の複数の動作パターンに基づいて、遊脚状態であるとともに使用者が歩行状態である状態(以下、「歩行遊脚状態」という)を判定する。すなわち、判定部6は、足底11の接地状態(接地パターン)のみではなく、使用者の動作パターンまでをも考慮して、歩行遊脚状態を決定する。ここで、歩行遊脚状態は、動作検出装置1が下肢装具、義足および歩行器などに用いられる際に、下肢装具などの膝関節の固定を解除する条件となる。
【0063】
ここで、下肢装具などの膝関節の固定解除は、第1前提として足底11が床面や地面から離隔している遊脚状態であることを必要とする。従来技術は、この第1前提のみで膝関節の固定を解除していた。実施の形態1の動作検出装置1は、この遊脚状態に、使用者の歩行状態を示す動作パターンを第2前提として加えて、より正確に膝関節の固定解除の条件を判定する。
【0064】
記憶部7は、動作パターンを記憶する。あるいは、判定部6そのものが動作パターンを記憶する。判定部6は、この動作パターンを読み出して、遊脚状態である接地パターンと合わせて、使用者の歩行遊脚状態を判定する。
【0065】
動作パターンは、下記の第1条件、第2条件、第3条件および第4条件の少なくとも一つを含む。ここで、判定部6は、第1前提として接地パターンにおいて遊脚状態であることに加えて、第2前提としての動作パターンを考慮する。このため、判定部6は、歩行遊脚状態の候補である判定対象である遊脚状態の際に、動作パターンを考慮する。第1条件〜第4条件に記載の「判定対象となる遊脚状態」とは、歩行遊脚状態を判定する対象の現れである遊脚状態のタイミングを示す。
【0066】
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類。
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間。
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間。
(第4条件)判定対象となる遊脚状態と、この遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序。
【0067】
判定部6は、これらの第1条件、第2条件、第3条件および第4条件の少なくとも一つを用いて、判定対象となる遊脚状態が、膝関節の固定解除としても問題ない歩行遊脚状態となっているかを判定する。第1条件〜第4条件は、使用者であって特に下肢に障害を有する使用者に特有な動作パターンである加重要件である。このため、判定部6は、障害を有する使用者に特有な動作パターンの加重要件も満たされることで、初めて膝関節の固定を解除できる条件を提供する。
【0068】
従来技術は、このような障害を有する使用者に特有な動作パターンを考慮せずに、膝関節の固定解除となる歩行遊脚状態を判定していた。従来技術で説明したように、足底11が床面や地面から離隔している場合は、使用者が歩行中ではなく、立ったまま足踏みしたり,向きを変えたり,前かがみになることで足が上がってしまったりする状況も含む。このような状況にも関らず、下肢の不自由な使用者の膝関節の固定が解除されることは、使用者に非常な不安と危険を招きかねない。
【0069】
実施の形態1の動作検出装置1は、足底11が床面や地面から離隔している状態(遊脚状態)と使用者の動作パターンとに基づいて、膝関節の固定解除のタイミングを示す歩行遊脚状態を判定できる。言い換えると、動作検出装置1は、接地パターンと動作パターンとの両方に基づいて、歩行遊脚状態を判定する。
【0070】
この結果、使用者が歩行以外で遊脚状態となっている場合に、膝関節の固定が解除されることが著しく減少するので、動作検出装置1やこれを用いた機器は、下肢に障害を有する使用者へ、不安や危険を与えることが減少する。
【0071】
なお、検出部5、判定部6および記憶部7など、動作状態を判定する判定機能に関る要素は、判定手段4としてまとまる要素としてとらえることも好適である。
【0072】
次に、各部の詳細について説明する。
【0073】
(爪先センサーおよび踵センサー)
爪先センサー2は、足底11の爪先側の接地および離隔の少なくとも一方を検出する。例えば、爪先センサー2は、圧力センサー素子、温度センサー素子、距離センサー素子および光センサー素子の少なくとも一つを備える。これらのセンサー素子のいずれかの機能を利用して、爪先センサー2は、足底11の爪先側の接地および離隔の少なくとも一方を検出する。
【0074】
例えば、爪先センサー2が圧力センサー素子を備える場合には、圧力センサー素子が床面との接触圧力を検出することで、爪先センサー2は、接地および離隔の少なくとも一方を検出する。爪先センサー2が温度センサー素子を備える場合には、接地状態での温度は離隔状態での温度よりも高いと考えられるので、温度センサー素子が測定する温度が閾値以上である場合には、爪先センサー2は、接地状態として検出する(温度が閾地未満である場合には離隔状態として検出する)。
【0075】
あるいは、爪先センサー2が距離センサー素子を備える場合には、距離センサー素子が爪先と床面12との距離を測定する。距離が閾値未満である場合には、爪先は床面12にほぼ接地している状態といえ、距離が閾値以上である場合には、爪先は床面12から離隔している状態といえる。このように、爪先センサー2は、距離センサー素子が測定する距離が閾値以上であるか閾値未満であるかによって、爪先の離隔及び接地の少なくとも一方を検出する。
【0076】
また、爪先センサー2が光センサー素子を備える場合には、光センサー素子が検出する光量や輝度によって、爪先センサー2は、接地および離隔の少なくとも一方を検出する。爪先が床面12に接地している場合には、光センサー素子は、低い光量や輝度しか検出できない。逆に爪先が床面12から離れている場合には、光センサー素子は、高い光量や輝度を検出できる。このため、光センサー素子が閾値以上の光量や輝度を検出する場合には、爪先センサー2は、爪先が床面12から離隔しているとして検出し、光センサー素子が閾値未満の光量や輝度しか検出できない場合には、爪先センサー2は、爪先が床面12に接地しているとして検出する。
【0077】
このように、種々のセンサー素子を用いることで、爪先センサー2は、接地および離隔の少なくとも一方を検出できる。なお、上述のセンサー素子およびその検出手順は一例であり、他の種々の素子や手段が用いられても良い。あるいは、複数の異なるセンサー素子の組み合わせによって、爪先センサー2は、接地および離隔の少なくとも一方を検出しても良い。
【0078】
なお、踵センサー3は、爪先センサー2と同様の構成・機能を有し、上述のような処理手順によって、足底11の踵側の接地および離隔の少なくとも一方を検出する。
【0079】
なお、爪先センサー2および踵センサー3のそれぞれは、単一の素子によって接地および離隔の少なくとも一方を検出しても良いし、複数の素子によって接地および離隔の少なくとも一方を検出しても良い。また、爪先センサー2および踵センサー3のそれぞれは、接地を検出する素子と離隔を検出する素子とを、異なる素子として、備えても良い。
【0080】
爪先センサー2は、検出結果を第1信号として、検出部5に出力する。踵センサー3は、検出結果を第2信号として、検出部5に出力する。このとき、爪先センサー2および踵センサー3のそれぞれからは、無線通信、有線通信などによって、第1信号および第2信号が検出部5に出力される。
【0081】
(検出部)
検出部5は、第1信号と第2信号とに基づいて、足底11の接地パターンを検出する。第1信号は1ビットの信号であり、第2信号は1ビットの信号であるので、検出部5は、2ビットの信号によって、4値(4種類)の状態を含む接地パターンを検出できる。4種類の接地パターンは、図2を用いて説明した通りである。
【0082】
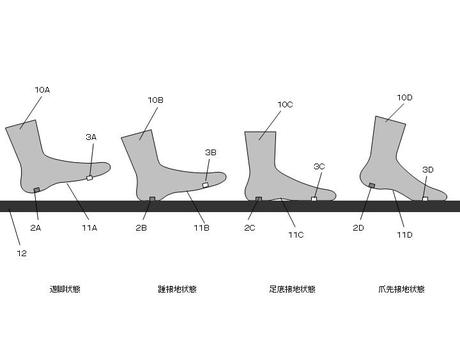
図3は、本発明の実施の形態1における検出部での検出に関するタイミングチャートである。図3のタイミングチャートは、1ビット(2値)の第1信号と1ビット(2値)の第2信号とを示している。2ビットの信号の2値も示しており、2値の状態によって、検出部5は、接地パターンである、「遊脚状態」、「踵接地状態」、「爪先接地状態」、「足底接地状態」を検出する。
【0083】
図3において、第1信号および第2信号の値「1」は、爪先センサー2および踵センサー3のそれぞれが床面12に接地している状態を示しており、第1信号および第2信号の値「0」は、爪先センサー2および踵センサー3のそれぞれが床面12から離隔している状態を示している。
【0084】
第1信号と第2信号との2ビットの信号(第1信号、第2信号)が、値(0、0)の場合には、検出部5は、「遊脚状態」として検出し、値(0、1)の場合には、「踵接地状態」として検出し、値(1,0)の場合には、「爪先接地状態」として判定し、値(1、1)の場合には、「足底接地状態」として検出する。
【0085】
このように、爪先センサー2および踵センサー3からの信号を、2ビットのデジタル信号として取り扱うことで、簡便な電子素子、電子回路および半導体集積回路(あるいはソフトウェア)によって、検出部5は、接地パターンを容易かつ確実に検出できる。
【0086】
検出部5は、検出結果を、判定部6に出力する。このとき、4種類の接地パターンを2ビットのデジタル信号で出力しても良いし、その他の信号として出力しても良い。なお、ここでは、検出部5が、4種類の接地パターンを判定した上で判定部6にその結果を出力することで説明した。しかし、検出部5は、検出した爪先センサー2および踵センサー3からの信号を、2ビットの信号に変換して判定部6に出力し、判定部6が、4種類の接地パターンを検出しても良い。
【0087】
次に、接地パターンと動作パターンとに基づく歩行遊脚状態の判定の詳細について説明する。
【0088】
(第1条件に基づく場合)
判定部6(もしくは検出部5)は、複数の接地パターンの内、足底全部が地面から離隔している「遊脚状態」を判定する。判定部6(検出部5)は、図3を用いて説明したように、2ビット信号が(0、0)である場合に、接地パターンを「遊脚状態」として判定する。判定部6は、歩行遊脚状態であるかを判定する判定対象となる遊脚状態に加えて、第1条件を用いて、判定対象となる遊脚状態が歩行遊脚状態であるか否かを判定する。
【0089】
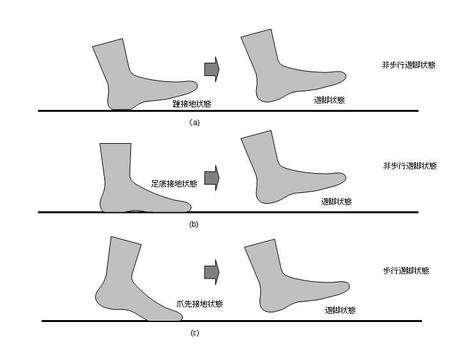
判定部6は、第1条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンが踵接地状態および足底接地状態のいずれかである場合には、この遊脚状態を、非歩行遊脚状態と判定する。一方、判定部6は、判定対象となる遊脚状態の直前の接地パターンが爪先接地状態である場合には、この遊脚状態を歩行遊脚状態として判定する。
【0090】
図4は、本発明の実施の形態1における第1条件に基づく場合の判定を説明する説明図である。図2(a)は、判定対象となる遊脚状態の直前が踵接地状態である場合を示し、図2(b)は、判定対象となる遊脚状態の直前が足底接地状態である場合を示し、図2(c)は、判定対象となる遊脚状態の直前が爪先接地状態である場合を示している。
【0091】
健常者は、歩行において足底が地面や床面から離隔する状態(遊脚状態)に至る接地パターンは様々である。例えば、健常者は、遊脚状態の直前を爪先接地状態とすることもあり(このパターンが多いと考えられる)、場合によっては、遊脚状態の直前を踵接地状態や足底接地状態とすることもある。健常者は、通常歩行、早足、ステップなど様々な歩行パターンを用いるからである。あるいは、歩行状態ではなく、立ち話している際に足を上げるようなパターン(遊脚状態の直前が足底接地状態)であるときに、膝関節の固定がなされていなくても、健常者は特段の危険を受けるものではない。
【0092】
ポリオや事故などの種々の要因によって下肢に不自由を有する使用者も、歩行状態である場合には、遊脚状態の直前を爪先接地状態とすることが多いと考えられる。このため、図4(c)のように、判定部6は、判定対象となる遊脚状態の直前が爪先接地状態である場合には、この遊脚状態を歩行遊脚状態として判定する。
【0093】
一方、ポリオや事故などの種々の要因によって下肢に不自由を有する使用者は、歩行状態ではなく立ち止まっている状態で足を上げるようなパターン(遊脚状態の直前が足底接地状態である)、後ろにつんのめるパターン(遊脚状態の直前が踵接地状態である)などにおいて、膝関節の固定が解除されることは、使用者に不安や危険を抱かせる。下肢の不自由な使用者は、膝関節の固定によって立脚を安定させているからである。膝関節の固定が解除されると、使用者は、立脚を安定させることが難しくなり、不安や危険を感じる。
【0094】
このため、図4(a)のように、判定対象の遊脚状態の直前が踵接地状態である場合には、使用者が後ろにつんのめっている状態である可能性もある、として判定部6は、この遊脚状態を非歩行遊脚状態であると判定する。さらに、図4(b)のように、判定対象の遊脚状態の直前が足底接地状態である場合には、使用者が立ち話中に足をあげた状態である可能性もある、として判定部6は、この遊脚状態を非歩行遊脚状態であると判定する。もちろん、実際の歩行遊脚状態である場合もあるが、下肢に不自由を有する使用者の安全性を優先して、判定部6は、この遊脚状態を非歩行遊脚状態として判定することが好ましい。
【0095】
このように、第1条件に基づく場合では、判定部6は、判定対象となる遊脚状態の直前の接地パターンの種類によって、この遊脚状態を歩行遊脚状態もしくは非歩行遊脚状態として判定する。
【0096】
(第2条件に基づく場合)
判定部6は、第2条件に基づく場合には、判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間によって、歩行遊脚状態もしくは非歩行遊脚状態を判定する。
【0097】
(判定その1)
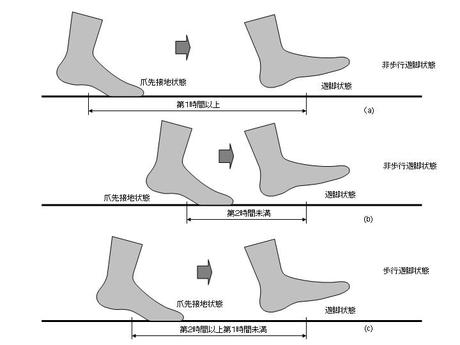
判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかでは、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態であると判定する。ここで、第1時間は、第2時間よりも長い。
【0098】
図5は、本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【0099】
通常の歩行では、図2に示されるように、踵接地状態に示されるように足が地面に接地を開始し、ついで足底接地状態に示されるように足底全部が地面に接地し、次いで爪先接地状態に示されるように足底が地面からの離隔を開始して、最後に遊脚状態に示されるように足底全部が地面から離隔する。このように、判定対象となる遊脚状態の直前の接地パターンの種類によって、判定部6は判定するだけでもよさそうである(第1条件に基づく判定)。しかし、直前の接地パターンが歩行に関る一連の流れと同じであっても、必ずしも歩行状態であるとは限らない。
【0100】
図5(a)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第1時間以上である場合を示している。図5(a)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態が非常に長い場合には、使用者は、歩行状態にあるのではなく立脚した状態のまま足を上げたものと考えることもできる。立ち話中に、足を上げるなどの動作であると、考えることができる。
【0101】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図5(a)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0102】
図5(b)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第2時間未満である場合を示している。図5(b)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。
【0103】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図5(b)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0104】
図5(c)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第2時間以上第1時間未満である場合を示している。図5(c)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態の継続時間が、適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターンの継続時間は、所定範囲におさまりやすいからである。
【0105】
このため図5(c)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0106】
このように、判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間に基づいて、正確に歩行遊脚状態/非歩行遊脚状態を判定できるようになる。
【0107】
なお、図5は、直前の接地パターンを、爪先接地状態として示しているが、他の接地パターン(足底接地状態、踵接地状態)であっても同じである。判定対象の遊脚状態の直前である遊脚状態以外の接地パターンの継続時間によって、判定部6は、歩行遊脚状態/非歩行遊脚状態を判定する。
【0108】
(判定その2)
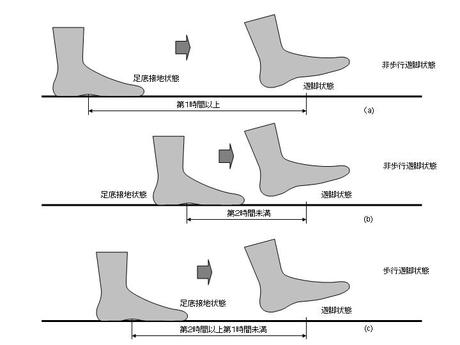
判定部6は、第2条件に基づく場合では、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0109】
なお、ここで継続時間の計測対象となる足底接地状態は、判定対象となる遊脚状態の直前でもよいし、他の接地パターンを挟んだ前であってもよい。すなわち、判定対象となる遊脚状態と計測対象となる足底接地状態の間に、他の接地パターン(踵接地状態や爪先接地状態)が含まれてもよい。
【0110】
図6は、本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。図6は、判定対象となる遊脚状態の直前が足底接地状態である状態を示しているが、図面作成の都合によるものであって、上述の通り、足底接地状態と遊脚状態との間に他の接地パターンが含まれてもよい。また、第1時間は、第2時間よりも長い。
【0111】
図6(a)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第1時間以上である場合を示している。この足底接地状態が非常に長い場合には、使用者は、歩行状態にあるのではなく立脚した状態のまま足を上げたものと考えることもできる。例えば、立ち話中に足踏みするなどの動作であると、考えることができる。あるいは、前かがみになる際に、足が地面から離隔しただけの状態であって、歩行状態ではないと考えることもできる。
【0112】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図6(a)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0113】
図6(b)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第2時間未満である場合を示している。この足底接地状態が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。
【0114】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図6(b)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0115】
図6(c)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第2時間以上第1時間未満である場合を示している。この足底接地状態が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターンの継続時間は、所定範囲におさまりやすいからである。
【0116】
このため図6(c)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0117】
このように、判定部6は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間に基づいて、正確に歩行遊脚状態/非歩行遊脚状態を判定できるようになる。
【0118】
以上の判定その1、判定その2は、第2条件に基づく場合の一例であり、使用者の障害の特性や使用者の歩き方の癖などに応じて、異なる手順が用いられてもよい。
【0119】
(第3条件に基づく場合)
判定部6は、第3条件に基づく場合には、ある接地パターンから他の接地パターンへの変移時間(ある接地パターンが開始されてから、次の接地パターンが開始されるまでの時間)に基づいて、判定対象の遊脚状態を、歩行遊脚状態/非歩行遊脚状態として判定する。
【0120】
健常者でも下肢に不自由を有する使用者であっても、歩行状態にある場合には、踵接地状態、足底接地状態、爪先接地状態、遊脚状態、の出現順序で、接地パターンを出現させることが多い。ここで、この出現順序が、通常の歩行状態で現れる場合には、ある接地パターンから他の接地パターンへの変移時間は、所定時間内に収まることが普通である。あるいはある接地パターンから他の接地パターンへの変移時間は、接地パターンの別なく、大体一定のリズムに収まることが普通である。
【0121】
これに対して、ある接地パターンから他の接地パターンへの変移時間が、極端に長かったり極端に短かったりする場合には、通常の歩行状態ではなかったり、イレギュラーな状態である可能性が高い。このような歩行状態でなかったりイレギュラーな状態であったりする場合に、判定部6が歩行遊脚状態であるとの判定を行って膝関節の固定が解除されることは、下肢に不自由を有する使用者へ不安や危険を与えかねない。
【0122】
このため第3条件は、このようなある接地パターンから他の接地パターンへの変移時間に着目した条件である。
【0123】
(判定その1)
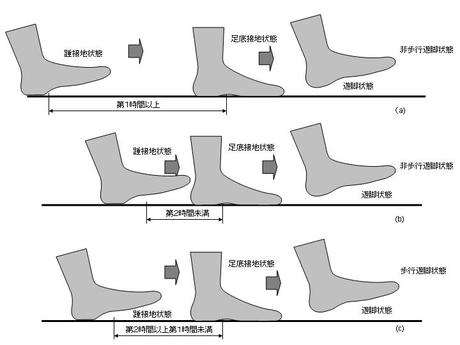
判定部6は、第3条件に基づく場合には、判定対象となる遊脚状態の時間的に前における踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、この踵接地状態から足底接地状態までの変移時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0124】
ここで、第1時間は、第2時間よりも長い。
【0125】
図7は、本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。図7は、作図の便宜のために、遊脚状態の直前が、足底接地状態であり、その前が踵接地状態である場合を示している。実際には、足底接地状態と遊脚状態との間に、爪先接地状態が含まれていてもよい。
【0126】
図7(a)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が第1時間以上である場合を示している。この変移時間が非常に長い場合には、使用者は、歩行を開始したのではなく立脚状態であるときに足の疲れに対応するために足底を地面につけただけである可能性がある。あるいは、立脚状態から前かがみになっただけであったり、前のめりになってしまっただけであったりする。あるいは、使用者は、足底の接地状態を入れ替えながら、立脚しているだけということも考えられる。
【0127】
このような場合に、判定部6が次に現れる遊脚状態を歩行遊脚状態であると判定すると、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。あるいは、前かがみや前のめりになっているときの安定性が損なわれる問題もある。このため、図7(a)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0128】
図7(b)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が第2時間未満である場合を示している。この変移時間が非常に短い場合には、使用者は、転倒しそうな危険状態であると考えることもできる。あるいは、立脚状態でありながら、足底の接地状態を変化させているだけとも考えられる。図7(b)から受ける印象の通り、踵接地状態から足底接地状態への変移時間が短いことは、歩行状態のリズムから見て違和感がある。
【0129】
このような場合に、判定部6が、判定対象の遊脚状態を、歩行遊脚状態であると判定することは、使用者の安定を損なうことになってしまう。このため、図7(b)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0130】
図7(c)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間以上第1時間未満である場合を示している。このように変移時間が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターン同士の変移時間は、所定範囲におさまりやすいからである。
【0131】
このため図7(c)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0132】
(判定その2)
判定部6は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、この足底接地状態から爪先接地状態までの変移時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0133】
ここで、第1時間は、第2時間よりも長い。
【0134】
図8は、本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。図8は、説明の便宜のために、遊脚状態の直前が、爪先接地状態であり、その前が足底接地状態である場合を示している。歩行状態において出現しやすい接地パターンの出現順序と考えられる。
【0135】
図8(a)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が第1時間以上である場合を示している。この変移時間が非常に長い場合には、使用者は、歩行を開始したのではなく立脚状態であるときに足踏みのために踵を上げただけである可能性がある。あるいは、立脚状態から前かがみになっただけであったり、前のめりになってしまっただけであったりする。
【0136】
このような場合に、判定部6が次に現れる遊脚状態を歩行遊脚状態であると判定すると、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。あるいは、前かがみや前のめりになっているときの安定性が損なわれる問題もあるこのため、図8(a)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0137】
図8(b)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が第2時間未満である場合を示している。この変移時間が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。図8(b)からの印象の通り、足底接地状態から爪先接地状態への変移時間が短いことは、歩行状態のリズムから見て違和感がある。
【0138】
このような場合に、判定部6が、判定対象の遊脚状態を、歩行遊脚状態であると判定することは、使用者の安定を損なうことになってしまう。このため、図8(b)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0139】
図8(c)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間以上第1時間未満である場合を示している。このように変移時間が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターン同士の変移時間は、所定範囲におさまりやすいからである。
【0140】
このため図8(c)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0141】
(第4条件に基づく場合)
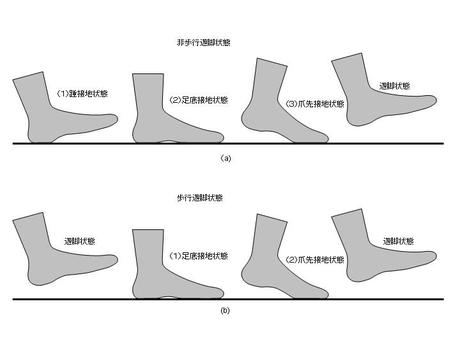
判定部6は、第4条件に基づく場合では、判定対象となる遊脚状態とこの遊脚状態の時間的に前における遊脚状態との期間(以下、出現期間)の接地パターンの出現順序が、(1)踵接地状態、(2)足底接地状態、(3)爪先接地状態の順序である場合には、この遊脚状態を非歩行遊脚状態であると判定する。また、判定部6は、この出現期間における接地パターンが、(1)足底接地状態、(2)爪先接地状態の順序である場合には、この遊脚状態を、歩行遊脚状態であると判定する。
【0142】
障害の原因や障害の程度によって相違するが、下肢に不自由を有する使用者は、歩行状態である場合の接地パターンの出現順序において、踵接地状態を含まないことがある。すなわちこのような使用者は、遊脚状態の次に踵から地面に接地させるのではなく、遊脚状態の次に即座に足底全体を地面に接地させる。これは、膝関節の固定や下肢の不自由によって引き起こされうる現象である。このため、判定部6は、遊脚状態から遊脚状態までの出現期間において、踵接地状態が含まれず、更には、(1)足底接地状態、(2)爪先接地状態の順序である場合には、遊脚状態を歩行遊脚状態として判定する。
【0143】
図9は、本発明の実施の形態1における第4条件にもとづく判定を説明する説明図である。
【0144】
図9(a)は、出現期間において、(1)踵接地状態、(2)足底接地状態、(3)爪先接地状態の順序で、接地パターンが出現する。図9(a)では、出現期間が踵接地状態から始まっており、下肢に不自由を有する使用者の歩行状態ではないと考えられる。このような場合に、この出現順序の後の遊脚状態(判定対象となる遊脚状態)が、歩行遊脚状態であると判定することは、歩行状態でないにも関らず膝関節の固定が解除される恐れがある。このため、判定部6は、図9(a)に示される出現順序の場合には、判定対象の遊脚状態を、非歩行遊脚状態として判定する。
【0145】
図9(b)は、出現期間において、(1)足底接地状態、(2)爪先接地状態の順序で、接地パターンが出現する。この出現順序は、下肢に不自由を有する使用者の歩行状態を示していると考えられる。このため、判定部6は、図9(b)に示される出現順序の場合には、判定対象の遊脚状態を、歩行遊脚状態として判定する。
【0146】
以上のように、第4条件を考慮することで、判定部6は、使用者への不安や危険を排除して、歩行遊脚状態を判定できる。
【0147】
第2条件および第3条件で用いられる第1時間および第2時間のそれぞれの時間的長さは、適宜定められればよい。これらは、実際の動作検出装置の設計において定められればよく、可変状態でプログラミングされておくことも好適である。例えば、記憶部7は、判定部6が用いるこの第1時間と第2時間を記憶する。このとき、複数の時間量に基づく第1時間と第2時間を記憶しておき、判定部6は、必要に応じて複数の第1時間と第2時間のそれぞれを選択して用いても良い。また、記憶部7は、第1時間および第2時間のそれぞれを書き換え可能に記憶しても良い。この場合には、実際の使用者が、自らの経験に基づいて第1時間と第2時間を入力する。このように、第1時間や第2時間といったパラメータは、設計段階、製造段階、使用段階の様々なステージで、柔軟に定められれば良い。
【0148】
以上では、第1条件〜第4条件のそれぞれを個別に説明したが、判定部6は、第1条件〜第4条件の2以上を適宜組み合わせることで、判定対象となる遊脚状態を、歩行遊脚状態もしくは非歩行遊脚状態として判定しても良い。
【0149】
また、第1条件〜第4条件のそれぞれの詳細な要素は、記憶部7に記憶されていることも好適である。判定部6は、必要に応じて記憶部7からこれらの要素を読み出すことで、第1条件〜第4条件の少なくとも一つを用いて、歩行遊脚状態を判定できる。
【0150】
なお、検出部5、判定部6および記憶部7は、一体であっても別体であってもよい。これらは、専用の電子基板、電子回路、半導体集積素子などのハードウェアで構成されてもよいし、その一部もしくは全部がソフトウェアで構成されても良い。もし、ソフトウェアで構成される場合には、CPUやDSPのような演算処理装置が設けられ、この演算処理装置が、ソフトウェアを実行させる。
【0151】
以上のように、実施の形態1における動作検出装置は、下肢装具などの膝関節固定を解除するタイミングの基準となる歩行遊脚状態を、足底が離隔している接地パターンだけでなく使用者の動作パターンである第1条件〜第4条件の少なくとも一つを用いて判定する。この結果、下肢に不自由を有する使用者が、下肢装具などを使用する際に、使用者への不安や危険を生じさせることを、著しく低減できる。
【0152】
(実施の形態2)
【0153】
次に、実施の形態2について説明する。
【0154】
実施の形態2では、判定部6の判定を制御する処理について説明する。
【0155】
図10は、本発明の実施の形態2における動作検出装置のブロック図である。図10は、図1で説明した動作検出装置に比較して、選択部20および入力手段21が追加されている。
【0156】
選択部20は、判定部6が、歩行遊脚状態/非歩行遊脚状態の判定において用いる第1条件〜第4条件を切り替える。実施の形態1で説明した通り、判定部6は、第1条件〜第4条件の少なくとも一つを用いて、歩行遊脚状態/非歩行遊脚状態を判定する。このとき、第1条件〜第4条件のいずれを用いるか、あるいは第1条件〜第4条件のいずれを組み合わせて用いるかは、使用者、使用状況などによって選択されることが好適である。
【0157】
選択部20は、第1条件〜第4条件のいずれを用いるかを選択する。選択部20は、判定部6の処理に基づいて、第1条件〜第4条件のいずれを用いるかを選択する。例えば、判定部6は、プログラムを動作させる演算処理装置を有している場合には、この動作の元となるプログラムの処理手順に従って、選択部20での選択方式を決定する。
【0158】
また、選択部20は、使用者の年齢、障害程度、性別、特性などのデータに基づき、所定の処理手順によって、第1条件〜第4条件のいずれかを選択する。これらの使用者の年齢、障害程度、性別、特性などのデータは、入力手段21から入力される。実際に、この動作検出装置1(あるいはこれを備える下肢装具)を使用する使用者が、この入力手段を通じて、これらのデータを入力する。
【0159】
また、使用者は、入力手段21を通じて、選択部20における選択動作を操作しても良い。例えば、使用者は、入力手段に第1条件〜第4条件の内、いずれかの条件を用いることを入力する。この入力によって、選択部20は、使用者の所望している条件を選択して、判定部6での判定を行わせる。
【0160】
このように、使用者の入力や製造者や補助者による入力によって、使用者に最適な条件が選択される。この結果、動作検出装置1は、膝関節の固定を解除する使用者にとって最適なタイミングを検出することができるようになる。
【0161】
なお、入力手段21は、動作検出装置1に備えられても良いし、リモコンや操作装置として、動作検出装置1と別体で実現されても良い。
【0162】
また、実施の形態1、2で説明された動作検出装置1の一部もしくは全部は、下肢に不自由を有する使用者が装着する下肢装具に組み込まれて実装される。
【0163】
(実施の形態3)
【0164】
次に、実施の形態3に付いて説明する。
【0165】
実施の形態3では、実施の形態1、2で説明された動作検出装置を用いた、膝固定解除装置について説明する。なお、ここでいう膝固定解除装置とは、主に膝関節を固定する固定状態を解除する装置をいう。このため、一般的には、膝関節の折れ曲がりを停止させるために固定されている固定状態を解除する装置を示す(すなわち、膝固定解除装置は、膝関節固定解除装置との概念を含むので、膝関節固定解除装置と言い換えることも可能である)。もちろん、膝関節に特化した固定ではなく、下肢の不自由な使用者の膝の姿勢を固定する固定状態を解除する装置を幅広く含むものである。
【0166】
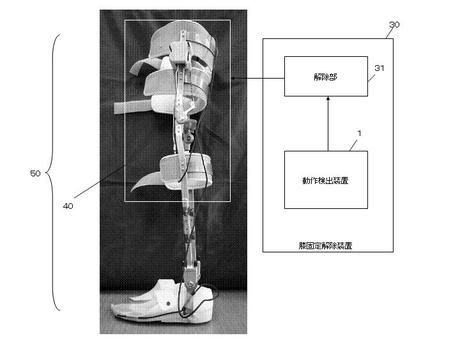
図11は、本発明の実施の形態3における固定解除装置とその周辺要素の模式図である。図11は、膝固定解除装置30と、膝固定解除装置30が固定解除の対象とする下肢装具とを合わせて示している。なお、作図の都合上、発明者が実際に試作した下肢装具50の写真に対して作用する膝固定解除装置30をブロック図として表している。実際には、膝固定解除装置30(およびこの膝固定解除装置30が備える動作検出装置1)は、この下肢装具50に組み込まれて実装されれば良い。
【0167】
下肢装具50は、使用者の膝関節を固定する固定部40を備えている。固定部40は、膝関節を固定したり、この固定を解除したりできる。膝固定解除装置30は、この固定部の解除を指示する。解除においては、膝固定解除装置30は、膝関節の固定部40の固定を解除するための信号を出力すれば良い。
【0168】
膝固定解除装置30は、実施の形態1、2で説明された動作検出装置1を備えている。動作検出装置1は、実施の形態1、2で説明したように膝関節の固定を解除するタイミングを示す歩行遊脚状態を検出する。動作検出装置1は、歩行遊脚状態を検出する場合には、この検出結果を示す信号を、解除部31に出力する。解除部31は、膝関節の固定部40にその固定を解除する信号を出力する。固定部40は、この解除信号に基づいて、膝関節の固定を解除する。
【0169】
なお、固定部40は、通常は膝関節を固定しておき、膝固定解除装置30からの解除信号を受けて、固定を解除しても良い。あるいは、膝固定解除装置30からの非解除信号を受ける場合には膝関節を固定し、膝固定解除装置30からの解除信号を受ける場合には膝関節の固定を解除しても良い。
【0170】
また、膝固定解除装置30は、解除を指示する信号を固定部40に出力するだけではなく、固定部40が膝関節を固定する作用を生じさせる動作そのものを解除する処理を行っても良い。
【0171】
(強制解除)
【0172】
また、解除部31は、使用者によって強制的に固定を解除する強制解除機構を有していてもよい。
【0173】
解除装置30は、動作検出装置1を備えることで、自動的に検出された歩行遊脚状態のタイミングで、固定部40での固定を解除できる。このため、使用者は、特段の操作をすることなく、膝関節の固定と解除を受けることができる。しかしながら、場合のよっては、使用者の意思に伴って膝関節の固定が解除されることが好ましい場合もある。前に大きくかがんだり、椅子に座ったりするような場合である。
【0174】
強制解除機構は、解除部31からの解除信号を強制的に「ON」にしたり、固定部40の固定機構を解除したりすることで、膝関節の固定を強制的に解除できる。このように、解除部31が強制解除機構を備えることで、使用者にとってユーザビリティの高い下肢装具を実現できる。また、強制解除機構は、種々の公知技術を用いても良い。
【0175】
ここで、強制解除機構は、解除部31に備えられても良いし、固定部40に備えられてもよい。いずれであっても、膝関節の強制解除という目的を達成できればよい。
【0176】
以上のように、実施の形態1、2で説明された動作検出装置1を備える膝固定解除装置30は、使用者の実際の歩行状態に最適に合致した、膝固定の解除を実現できる。なお、公知技術の膝固定解除装置や汎用に用いられている膝固定解除装置に、実施の形態1、2で説明された動作検出装置1が取り付けられることで、実施の形態3で説明した膝固定解除装置30が容易に実現できる。
【0177】
(実施の形態4)
【0178】
次に、実施の形態4について説明する。実施の形態4では、実施の形態3で説明した膝固定解除装置30を備える下肢装具について説明する。
【0179】
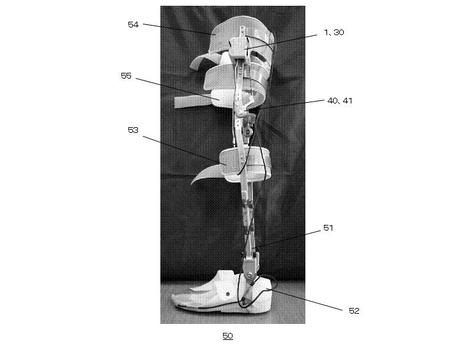
図12は、本発明の実施の形態4における下肢装具の写真である。図12に示される下肢装具50は、発明者が実際に試作したものである。
【0180】
下肢装具50は、使用者の大腿部および下腿部の少なくとも一部を覆う本体部55と、実施の形態1〜2で説明された動作検出装置1と、この動作検出装置1を含む実施の形態3で説明された膝固定解除装置30と、膝関節を固定する固定部40と、を備える。図12に示されるように、下肢装具50は、人体の足の周囲を固定できるような外形を有している。
【0181】
本体部55は、使用者の大腿部および下腿部の少なくとも一部を覆うことで、使用者の膝関節の上下のそれぞれにおいて、第1装着部54と第2装着部53が備えられている。第1装着部54と第2装着部53のそれぞれは、バンドを有しており、大腿部や下腿部の周囲に装着して、下肢装具50を使用者に固定できる。バンドは、面ファスナーなどによって固定されれば良い。この第1装着部54と第2装着部53とによって、膝関節が挟まれる。
【0182】
また、第1装着部54と第2装着部53とは、フレーム51によって接続されている。このフレーム51が使用者の下肢に沿って下肢装具50を取り付けることができる。フレーム51は、後述の継ぎ手41において大腿部側の部材と下腿部側の部材とに分かれている。この継ぎ手41が伸長していると、大腿部側の部材と下腿部側の部材とが直進状態となる。継ぎ手41が折れ曲がると、大腿部側と下腿部側の部材とが屈曲状態となる。
【0183】
膝関節を固定する固定部40は、第1装着部54と第2装着部53とに挟まれる位置に設けられる。固定部40は、継ぎ手41を備えており、この継ぎ手41の伸長が膝関節の固定を生じさせ、この継ぎ手41の折れ曲がりが膝関節の固定解除を生じさせる。
【0184】
継ぎ手41は、フレーム51を大腿部から下腿部にひきつける内蔵ばねによって、常にロックされている。このロックによって、継ぎ手41は、フレーム51の立脚方向を固定する。すなわち、継ぎ手41は、膝関節を固定する。継ぎ手41は、この内蔵ばねの弾性力を失うことで、フレーム51の立脚方向への直進性が失われる。この結果膝関節の固定が解除されて、使用者は、膝関節を折り曲げることが可能となる。
【0185】
膝固定解除部40は、この内蔵ばねを大腿部側に引き寄せる作用によって、継ぎ手41の伸長を解消させて膝関節の固定を解除する。例えば、膝固定解除部40は、内蔵ばねを、大腿部側に引き寄せるモーター駆動を行う。これは、動作検出装置1が歩行遊脚状態であることを検出した場合に行われる。動作検出装置1による歩行遊脚状態の検出は、実施の形態1、2で説明した通りである。
【0186】
また、フレーム51の大腿部側の部材と下腿部側の部材とが継ぎ手41で接続されることで、継ぎ手41の伸長と屈曲が、膝関節の固定と解除を生み出すことも好適であるが、継ぎ手41以外の種々の機構が用いられても良い。例えば、嵌合によるロック機構を、固定部40が備えており、膝固定解除装置30からの操作によって嵌合が外れると、固定部40は、膝関節の固定を解除するなどである。
【0187】
(下肢装具の使用状態の説明)
【0188】
次に、発明者が試作した下肢装具の使用状態について説明する。
【0189】
図13は、本発明の実施の形態4における下肢装具を装着した踵接地状態を示す写真である。使用者は、下肢装具50を自分の下肢に装着している。装着においては、第1装着部54、第2装着部53が用いられる。下肢装具50は、固定部40を備えており、固定部40は、継ぎ手41の伸長と屈曲とによって、膝関節の固定とその解除を切り替える。膝固定解除装置30は、動作検出装置1を備えており、動作検出装置1が歩行遊脚状態を検出する場合に、膝関節の固定を解除する。それ以外の場合では、常時、膝関節を固定しておく。膝固定解除装置30およびこれが備える動作検出装置1は、電子基板、電子回路、演算処理装置によるソフトウェアとして、筐体の中に格納される。
【0190】
図13では、踵61が地面に接地しており踵接地状態であるので、動作検出装置1は、歩行遊脚状態ではないと判定している。このため、膝固定解除装置30は、固定部40における固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0191】
図14は、本発明の実施の形態4における下肢装具を装着した足底接地状態を示す写真である。なお、説明が重複する要素については、符号を省略している。使用者は、図13の場合と同様に、下肢装具50を自分の下肢に装着している。ここで、図14では、足底62の全体が地面に接地しており、足底接地状態である。このため、動作検出装置1は、歩行遊脚状態ではないと判定するので、膝固定解除装置30は、固定部40による固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0192】
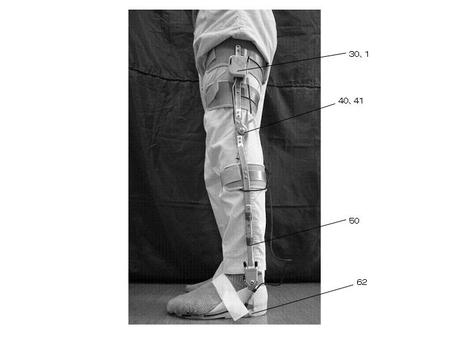
図15は、本発明の実施の形態4における下肢装具を装着した爪先接地状態を示している。なお、説明が重複する要素については、符号を省略している。使用者は、下肢装具50を自分の下肢に装着している。ここで、図15では、爪先63が地面に接地しており、爪先接地状態である。このため、動作検出装置1は、歩行遊脚状態ではないと判定するので、膝固定解除装置30は、固定部40による固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0193】
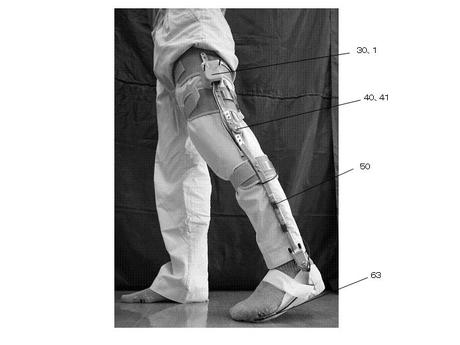
図16は、本発明の実施の形態4における下肢装具を装着した非歩行遊脚状態を示している。なお、説明が重複する要素については、符号を省略している。使用者は、下肢装具50を自分の下肢に装着している。ここで、図16では、足底62が全て地面から離隔している。しかしながら、足底が離隔している場合でも、歩行状態による場合ではなく、使用者がつんのめったり、足を上げただけだったりすることもある。
【0194】
実施の形態1、2で説明したように、動作検出装置1は、使用者の動作パターンも考慮して、足底62全体が地面から離隔している場合でも、非歩行遊脚状態であると判定することもある。図16では、動作検出装置1が、非歩行遊脚状態であると判定している。このため、膝固定解除装置30は、継ぎ手41の伸長をそのままに継続させる。この結果、下肢装置50は、膝関節を伸長した状態で固定している。
【0195】
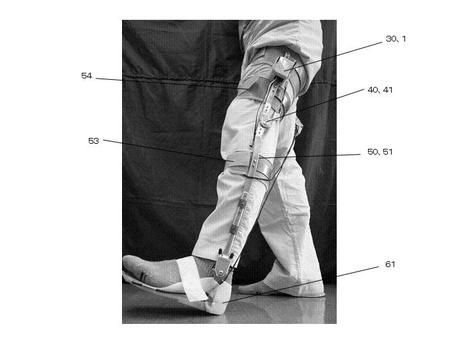
図17は、本発明の実施の形態4における下肢装具を装着した歩行遊脚状態を示している。使用者は、下肢装具50を自分の下肢に装着している。ここで図17では、足底62全体が地面から離隔しており、かつ動作検出装置1が、歩行遊脚状態であると判定している。動作検出装置1は、実施の形態1、2で説明された手順で歩行遊脚状態を検出する。
【0196】
この結果、膝固定解除装置30は、膝関節の固定を解除する。例えば、膝固定解除装置30は、継ぎ手41の弾性力を解除して継ぎ手41を屈曲させる。この結果、図17に示されるとおり、膝関節は屈曲することができ、使用者は、楽に歩行できるようになる。
【0197】
以上のように、下肢装具50は、膝関節の固定を解除することが必要な場合のみを正確に検出した上で、使用者の膝関節を固定したり、固定を解除したりできる。結果として、下肢装具50は、使用者にとって、ユーザビリティの高い歩行での補助を与えることができる。
【0198】
以上、実施の形態1〜4で説明された動作検出装置、膝固定解除装置および下肢装具は、本発明の趣旨を説明する一例であり、本発明の趣旨を逸脱しない範囲での変形や改造を含む。
【符号の説明】
【0199】
1 動作検出装置
2 爪先センサー
3 踵センサー
4 判定手段
5 検出部
6 判定部
7 記憶部
10 足
11 足底
20 選択部
30 膝固定解除装置
31 解除部
40 固定部
41 継ぎ手
50 下肢装具
51 フレーム
53 第2装着部
54 第1装着部
55 本体部
【技術分野】
【0001】
本発明は、下肢麻痺、特に膝関節の伸展が困難な者の歩行や動作を検出する動作検出装置、この動作検出装置を備える膝固定解除装置、およびこの膝固定解除装置を備える下肢麻痺者の歩行を補助する下肢装具に関する。
【背景技術】
【0002】
脳卒中やポリオなどによって、下肢(特に膝関節の伸展)に障害を有する下肢麻痺者は、装具や歩行補助装置などを用いて、歩行の支援を受ける。下肢麻痺者が膝関節機能(膝の伸展・屈曲)や足関節機能(足の背屈・底屈)に著しい障害を有する場合、大腿部から下腿部、さらには足底にかけて下肢を支持あるいは固定する長下肢装具が用いられる。
【0003】
このような長下肢装具は、装具使用者の膝関節を固定する膝継手機構を組み込むことが多い。下肢、特に膝関節機能に障害を有する使用者が、膝関節を固定しないで立位・歩行を行うと、立位が不安定となり歩行時に膝折れを生じる危険性がある。膝関節が固定されることで、障害側下肢で体を支えることができ、安心して歩くことができるようになる。
【0004】
一方で、長下肢装具によって膝関節が固定されていると、使用者は歩行遊脚期に膝が固定されているので伸び上がるか回すようにして下肢を振り出さざるを得なくなる。平坦な地面や床面を歩行する際に、意識して下肢を振り出すことは、使用者にとって精神的にも肉体的にも負担である。また、階段を昇降する場合には、膝関節が固定されていると不便である。
【0005】
このような状況下において、使用者の動作状態の検出により、歩行を補助する装置の動作が使用者の動作状態に最適化される技術が提案されている(例えば、特許文献1参照)。加えて、使用者の動作状態が検出されることで、必要に応じて膝関節の固定を解除したり膝関節の回動が制御されたりする技術が提案されている(例えば、特特許文献2、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−148637号公報
【特許文献2】実登3002320号公報
【特許文献3】特再公表2007−108551号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の技術においては、下肢装具は、足底の爪先側と踵側のそれぞれに設置された接地センサーからの接地状態の検出によって、使用者の動作状態を検出する。例えば、爪先側の接地センサーおよび踵側の接地センサーの双方が、地面から離れていることを検出する場合には、下肢装具は、膝関節の固定を解除する。このように、足底の爪先側と踵側とに設けられた接地センサーからの信号に基づいて、膝関節の固定を解除する技術は、従来においても用いられていた。
【0008】
特許文献1〜3のそれぞれの技術は、足底に設置された接地センサーによる接地状態の検出にその他の条件を加えた上で、使用者の動作状態を検出する。動作状態は、立脚状態(足を地面に接地させて立っている状態)、遊脚状態(足が地面から離れて歩行している状態)、およびこれらを更に細分化した状態を含む。このような使用者の動作状態の検出によって、使用者の歩行を補助する装置の動作が、使用者の実際の動作により近づけられるようになる。特許文献2、3のそれぞれの技術は、遊脚状態を検出する場合を、膝関節の固定を解除したり膝関節の回動を制御したりするタイミングとして用いる。膝関節の固定が解除されることによって、使用者が膝を折り曲げて歩行できるようになり、下肢装具を装着する使用者は、自然に近い歩行を行えるようになる。
【0009】
特許文献1の技術は、その他の条件として、遊脚の足の相対速度を用いる。遊脚の足の相対速度が所定値以上であれば遊脚状態(足が地面を離れて歩行している)が継続していると判断し、所定値未満であれば遊脚状態が終了すると判断する。
【0010】
特許文献2の技術は、その他の条件として、膝関節の屈曲角度を用いる。膝関節の屈曲角度を考慮することで、特許文献2の技術は、膝関節の固定を、より精密に解除する。
【0011】
特許文献3の技術は、その他の条件として、検出される荷重を用いる。荷重を検出することで、膝関節における回動が制御される。特許文献2および特許文献3の技術は、遊脚状態を検出することで、積極的に膝関節の固定を解除する。
【0012】
しかしながら、特許文献1〜特許文献3に開示される従来の技術は、使用者の意図していない動作を考慮せずに、足底が地面から離れると膝関節の固定を解除する。例えば、使用者が立ち話をしながら下肢装具を装着した足底を地面から離したりすることがある(体の重心位置を変えることで、足底が地面から離れる)。このような場合に膝関節の固定が解除されると、使用者は転倒する危険性にさらされる。あるいは、使用者が前傾姿勢になった場合にも足底が地面から離れることもある。この場合にも、膝関節の固定が解除されると、使用者はバランスを崩して危険にさらされる問題がある。
【0013】
このように、従来技術の下肢装具は、使用者の歩行をより容易とさせることを優先するため、使用者の意図しない動作においても膝関節の固定を解除して、使用者を不安や危険にさらす問題を有している。
【0014】
また、障害者の歩行パターンは健常者と異なることも多く、歩行パターンを考慮せずに、地面から足底が離れただけで膝関節の固定を解除することは、同様の危険を生じさせる。特許文献1〜特許文献3の技術は、速度や角度を考慮しているが、これらは、使用者の意図しない動作を考慮していないので、特許文献1〜特許文献3の技術も、使用者に不安や危険を感じさせる膝関節の固定解除を起こしてしまう。
【0015】
障害を有する使用者にとっては、歩きやすさを優先して膝関節の固定を解除することを優先するよりも、なるべく膝関節の固定を解除しないことを原則としつつ、必要最小限において膝関節の固定を解除することが重要である。
【0016】
また、特許文献1〜特許文献3などの従来技術は、膝関節の固定の解除のタイミングを検出するために、速度計や角度計測器などの様々な機器を用いる。このため、下肢装具が大型化して重くなってしまう。使用者は障害者であって、このような重い下肢装具を装着することは、非常な負担である問題もあった。
【0017】
本発明は、上記課題に鑑み、簡便かつ軽量であって、使用者の意図しない動作をも考慮して膝関節の固定を解除できる、安全性の高い動作検出装置、膝固定解除装置および下肢装具を提供することを目的とする。
【課題を解決するための手段】
【0018】
上記課題に鑑み、本発明の動作検出装置は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、爪先センサーからの第1信号と踵センサーからの第2信号とによって、足底の複数の接地パターンを検出する検出部と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、複数の動作パターンは、
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む。
【発明の効果】
【0019】
本発明の動作検出装置は、足底が地面から離れたことに加えて、使用者の動作を示す追加条件を考慮することで、障害者である使用者の動作をより正確に検出できる。特に、使用者の意図しない動作に基づいて遊脚状態と判断しないので、動作検出装置およびこれを用いた下肢装具は、使用者に不安や危険を与える膝関節の固定解除を引き起こさない。
【0020】
動作検出装置は、爪先側と踵側のいずれもが地面から離れている状態を遊脚状態として判断した上で、追加条件によって、実際の歩行中である遊脚状態(以下、「歩行遊脚状態」という)を、高い精度で検出できる。この結果、膝関節の固定は、必要最低限の場合のみ解除されるようになる。
【0021】
また、追加条件として、(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序が、適宜用いられることによって、動作検出装置は、高い精度で歩行遊脚状態を検出できる。
【0022】
これらの結果、本発明の動作検出装置、膝固定解除装置および下肢装具は、使用者に不安や危険を与えることなく、使用者の歩行や立位を補助できる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施の形態1における動作検出装置のブロック図である。
【図2】本発明の実施の形態1における接地パターンを説明する模式図である。
【図3】本発明の実施の形態1における検出部での検出に関するタイミングチャートである。
【図4】本発明の実施の形態1における第1条件に基づく場合の判定を説明する説明図である。
【図5】本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【図6】本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【図7】本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。
【図8】本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。
【図9】本発明の実施の形態1における第4条件にもとづく判定を説明する説明図である。
【図10】本発明の実施の形態2における動作検出装置のブロック図である。
【図11】本発明の実施の形態3における固定解除装置とその周辺要素の模式図である。
【図12】本発明の実施の形態4における下肢装具の写真である。
【図13】本発明の実施の形態4における下肢装具を装着した踵接地状態を示す写真である。
【図14】本発明の実施の形態4における下肢装具を装着した足底接地状態を示す写真である。
【図15】本発明の実施の形態4における下肢装具を装着した爪先接地状態を示している。
【図16】本発明の実施の形態4における下肢装具を装着した非歩行遊脚状態を示している。
【図17】本発明の実施の形態4における下肢装具を装着した歩行遊脚状態を示している。
【発明を実施するための形態】
【0024】
本発明の第1の発明に係る動作検出装置は、使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、爪先センサーからの第1信号と踵センサーからの第2信号とによって、足底の複数の接地パターンを検出する検出部と、複数の接地パターンの内、足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、使用者の複数の動作パターンに基づいて、遊脚状態であることに加えて使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、複数の動作パターンは、
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類、
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間、
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む。
【0025】
この構成により、動作検出装置は、使用者が足底を地面から離隔させているときであっても、歩行遊脚状態であるのか非歩行遊脚状態であるのかを高い精度で検出できる。
【0026】
本発明の第2の発明に係る動作検出装置では、第1の発明に加えて、検出部は、第1信号および第2信号のそれぞれが「接地」を示す場合には、接地パターンを、「足底接地状態」と判断し、第1信号が「離隔」を示し、第2信号が「接地」を示す場合には、接地パターンを、「踵接地状態」と判断し、第1信号が「接地」を示し、第2信号が「離隔」を示す場合には、接地パターンを、「爪先接地状態」と判断し、第1信号および第2信号のそれぞれが「離隔」を示す場合には、接地パターンを、「遊脚状態」と判断する。
【0027】
この構成により、検出部は、足底と地面との接触関係を確実に検出できる。この結果、歩行遊脚状態の基準となる接地パターンおよび動作パターンを正確に検出できる。
【0028】
本発明の第3の発明に係る動作検出装置では、第2の発明に加えて、判定部は、第1条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンが踵接地状態および足底接地状態のいずれかである場合には、該遊脚状態を非歩行遊脚状態として判定し、直前の接地パターンが爪先接地状態である場合には、該遊脚状態を、歩行遊脚状態として判定する。
【0029】
この構成により、動作検出装置は、下肢に障害のある使用者の歩行に至る動作を正確に検出できる。
【0030】
本発明の第4の発明に係る動作検出装置では、第2又は第3の発明に加えて、判定部は、第2条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0031】
この構成により、動作検出装置は、使用者が歩行状態であるのか、立ったまま足を上げたり、前のめりになったりなどの状態であるのかを、高い精度で判別できる。
【0032】
本発明の第5の発明に係る動作検出装置では、第2又は第3の発明に加えて、判定部は、第2条件に基づく場合では、判定対象となる遊脚状態の時間的に前の足底接地状態が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0033】
この構成により、動作検出装置は、使用者が歩行状態であるのか、立ったまま足を上げたり、前のめりになったりなどの状態であるのかを、高い精度で判別できる。
【0034】
本発明の第6の発明に係る動作検出装置では、第2から第5のいずれかの発明に加えて、判定部は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0035】
この構成により、動作検出装置は、使用者が歩行状態にあるのか、歩行状態ではないが突発的な状態となったのかを、高い精度で判別できる。
【0036】
本発明の第7の発明に係る動作検出装置では、第2から第5のいずれかの発明に加えて、判定部は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、第2時間以上第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、第1時間は、第2時間よりも長い。
【0037】
この構成により、動作検出装置は、使用者が歩行状態であるのか、歩行と異なる動作を行っているのかを、高い精度で判別できる。
【0038】
本発明の第8の発明に係る動作検出装置では、第2から第7のいずれかの発明に加えて、判定部は、第4条件に基づく場合では、判定対象となる遊脚状態と該遊脚状態の時間的に前における遊脚状態との期間の接地パターンが、踵接地状態、足底接地状態および爪先接地状態の順序である場合には、該遊脚状態を、非歩行遊脚状態であると判定し、判定対象となる遊脚状態と該遊脚状態の時間的に前における遊脚状態との期間の接地パターンが、足底接地状態および爪先接地状態の順序である場合には、該遊脚状態を、歩行遊脚状態であると判定する。
【0039】
この構成により、動作検出装置は、下肢に障害を有する使用者の接地パターンの出現順序に最適化して、歩行遊脚状態を検出できる。
【0040】
本発明の第9の発明に係る動作検出装置では、第1から第8のいずれかの発明に加えて、第1条件、第2条件、第3条件および第4条件のいずれを用いるかを選択する、選択部を更に備える。
【0041】
この構成により、動作検出装置は、使用者の特性や好みに合わせて、歩行遊脚状態を検出できる。
【0042】
本発明の第10の発明に係る動作検出装置では、第9の発明に加えて、選択部は、使用者によって制御される。
【0043】
この構成により、使用者は、みずからの好みや経験に合わせて、動作検出装置での検出特性を制御できる。
【0044】
本発明の第11の発明に係る動作検出装置では、第1から第10のいずれかの発明に加えて、爪先センサーおよび踵センサーの少なくとも一方は、圧力センサー、温度センサー、距離センサーおよび光センサーの少なくとも一つを備える。
【0045】
この構成により、動作検出装置は、高い精度で、接地パターンを検出できる。
【0046】
以下、図面を用いて、本発明の実施の形態について説明する。
【0047】
(実施の形態1)
【0048】
実施の形態1について説明する。
【0049】
(全体概要)
まず、実施の形態1における動作検出装置の概要を説明する。実施の形態1の動作検出装置は、人体の動作状態であって特に歩行中の細かな動作状態を検出する。実施の形態1の動作検出装置は、様々な用途に適用される。例えば、動作検出装置は、下肢の不自由な使用者が装着する下肢装具、下肢の不自由な使用者が装着する義足、下肢の不自由な使用者が用いる歩行器、ロボットの歩行機構、おもちゃの歩行機構などに用いられる。
【0050】
まず、図1を用いて、動作検出装置の概要を説明する。図1は、本発明の実施の形態1における動作検出装置のブロック図である。図1は、動作検出装置1とその周辺に存在する要素を合わせて示している。
【0051】
動作検出装置1は、爪先センサー2、踵センサー3、検出部5、判定部6を備える。また、判定部6が情報として用いる動作パターンを記憶する記憶部7を更に備える。なお、記憶部7は、図1では他の要素と独立した別の要素として示されているが、記憶部7は、判定部6の内部に備わる要素であっても良い。あるいは、判定部6が動作パターンそのものを記憶していてもよい。動作パターンは、必要に応じて予め記憶されていることもありえるので、記憶部7がこれを記憶しても良いものである。また、図1は、使用者の足10の一部も合わせて示している。
【0052】
爪先センサー2は、使用者の足底11の爪先側に設けられ、足底の爪先側の接地(爪先側が床面や地面に接触している状態を示す。以下も同じ)および離隔(爪先側が地面や床面から離れている状態を示す。以下も同じ)の少なくとも一方を検出する。爪先センサー2は、この検出した接地および離隔の少なくとも一方の結果を、第1信号として、検出部5に出力する。
【0053】
踵センサー3は、使用者の足底11の踵側に設けられ、足底の踵側の接地(踵側が床面や地面に接触している状態を示す。以下も同じ)および離隔(踵側が地面や床面から離れている状態を示す。以下も同じ)の少なくとも一方を検出する。踵センサー3は、この検出した接地および離隔の少なくとも一方の結果を、第2信号として、検出部5に出力する。
【0054】
検出部5は、爪先センサー2からの第1信号と踵センサー3からの第2信号とに基づいて、足底11の複数の接地パターンを検出する。複数の接地パターンは、足底11が、爪先側と踵側とを要素として、どのような状態で床面や地面と接地や離隔をしているかを示す。
【0055】
複数の接地パターンは、「接地」と「離隔」の2値を示す第1信号と第2信号から判断される。すなわち、検出部5は、2ビットの信号によって、4種類の接地パターンを検出する。
【0056】
図2は、本発明の実施の形態1における接地パターンを説明する模式図である。図2は、足10の足底11の接地パターンを4種類の状態で示している。図2は、左から「遊脚状態」、「踵接地状態」、「足底接地状態」、「爪先接地状態」の4状態を示している。接地パターンは、これら4種類の状態のいずれかを示す。
【0057】
(遊脚状態)
第1信号および第2信号のそれぞれが「離隔」を示す場合(すなわち、爪先センサー2Aが離隔を示し、踵センサー3Aが離隔を示す場合)には、足底11Aは、床面12から完全に離隔している。このような足底11Aの状態を、検出部5は、「遊脚状態」として検出する。
【0058】
(踵接地状態)
第1信号が「離隔」を示し、第2信号が「接地」を示す場合(すなわち、爪先センサー2Bが離隔を示し、踵センサー3Bが接地を示す場合)には、足底11Bの踵のみが床面12に接地している。このような足底11Bの状態を、検出部5は、「踵接地状態」として検出する。
【0059】
(足底接地状態)
第1信号および第2信号のそれぞれが「接地」を示す場合(すなわち、爪先センサー2Cが接地を示し、踵センサー3Cが接地を示す場合)には、足底11Cの全体が床面12に接地している。このような足底11Cの状態を、検出部5は、「足底接地状態」として検出する。
【0060】
(爪先接地状態)
第1信号が「接地」を示し、第2信号が「離隔」を示す場合(すなわち、爪先センサー2Dが接地を示し、踵センサー3Dが離隔を示す場合)には、足底11Dの爪先側だけが床面12に接地している。このような足底11Dの状態を、検出部5は、「爪先接地状態」として検出する。
【0061】
このように、検出部5は、足底11の床面12に対する4種類の接地状態を、接地パターンとして検出して、検出結果を判定部6に出力する。
【0062】
判定部6は、検出部5が検出した複数の接地パターンの内、足底11が床面や地面から離隔している状態(以下、「遊脚状態」という)であることを判定する。更に、判定部6は、使用者の複数の動作パターンに基づいて、遊脚状態であるとともに使用者が歩行状態である状態(以下、「歩行遊脚状態」という)を判定する。すなわち、判定部6は、足底11の接地状態(接地パターン)のみではなく、使用者の動作パターンまでをも考慮して、歩行遊脚状態を決定する。ここで、歩行遊脚状態は、動作検出装置1が下肢装具、義足および歩行器などに用いられる際に、下肢装具などの膝関節の固定を解除する条件となる。
【0063】
ここで、下肢装具などの膝関節の固定解除は、第1前提として足底11が床面や地面から離隔している遊脚状態であることを必要とする。従来技術は、この第1前提のみで膝関節の固定を解除していた。実施の形態1の動作検出装置1は、この遊脚状態に、使用者の歩行状態を示す動作パターンを第2前提として加えて、より正確に膝関節の固定解除の条件を判定する。
【0064】
記憶部7は、動作パターンを記憶する。あるいは、判定部6そのものが動作パターンを記憶する。判定部6は、この動作パターンを読み出して、遊脚状態である接地パターンと合わせて、使用者の歩行遊脚状態を判定する。
【0065】
動作パターンは、下記の第1条件、第2条件、第3条件および第4条件の少なくとも一つを含む。ここで、判定部6は、第1前提として接地パターンにおいて遊脚状態であることに加えて、第2前提としての動作パターンを考慮する。このため、判定部6は、歩行遊脚状態の候補である判定対象である遊脚状態の際に、動作パターンを考慮する。第1条件〜第4条件に記載の「判定対象となる遊脚状態」とは、歩行遊脚状態を判定する対象の現れである遊脚状態のタイミングを示す。
【0066】
(第1条件)判定対象となる遊脚状態の時間的に直前における接地パターンの種類。
(第2条件)判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間。
(第3条件)判定対象となる遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間。
(第4条件)判定対象となる遊脚状態と、この遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序。
【0067】
判定部6は、これらの第1条件、第2条件、第3条件および第4条件の少なくとも一つを用いて、判定対象となる遊脚状態が、膝関節の固定解除としても問題ない歩行遊脚状態となっているかを判定する。第1条件〜第4条件は、使用者であって特に下肢に障害を有する使用者に特有な動作パターンである加重要件である。このため、判定部6は、障害を有する使用者に特有な動作パターンの加重要件も満たされることで、初めて膝関節の固定を解除できる条件を提供する。
【0068】
従来技術は、このような障害を有する使用者に特有な動作パターンを考慮せずに、膝関節の固定解除となる歩行遊脚状態を判定していた。従来技術で説明したように、足底11が床面や地面から離隔している場合は、使用者が歩行中ではなく、立ったまま足踏みしたり,向きを変えたり,前かがみになることで足が上がってしまったりする状況も含む。このような状況にも関らず、下肢の不自由な使用者の膝関節の固定が解除されることは、使用者に非常な不安と危険を招きかねない。
【0069】
実施の形態1の動作検出装置1は、足底11が床面や地面から離隔している状態(遊脚状態)と使用者の動作パターンとに基づいて、膝関節の固定解除のタイミングを示す歩行遊脚状態を判定できる。言い換えると、動作検出装置1は、接地パターンと動作パターンとの両方に基づいて、歩行遊脚状態を判定する。
【0070】
この結果、使用者が歩行以外で遊脚状態となっている場合に、膝関節の固定が解除されることが著しく減少するので、動作検出装置1やこれを用いた機器は、下肢に障害を有する使用者へ、不安や危険を与えることが減少する。
【0071】
なお、検出部5、判定部6および記憶部7など、動作状態を判定する判定機能に関る要素は、判定手段4としてまとまる要素としてとらえることも好適である。
【0072】
次に、各部の詳細について説明する。
【0073】
(爪先センサーおよび踵センサー)
爪先センサー2は、足底11の爪先側の接地および離隔の少なくとも一方を検出する。例えば、爪先センサー2は、圧力センサー素子、温度センサー素子、距離センサー素子および光センサー素子の少なくとも一つを備える。これらのセンサー素子のいずれかの機能を利用して、爪先センサー2は、足底11の爪先側の接地および離隔の少なくとも一方を検出する。
【0074】
例えば、爪先センサー2が圧力センサー素子を備える場合には、圧力センサー素子が床面との接触圧力を検出することで、爪先センサー2は、接地および離隔の少なくとも一方を検出する。爪先センサー2が温度センサー素子を備える場合には、接地状態での温度は離隔状態での温度よりも高いと考えられるので、温度センサー素子が測定する温度が閾値以上である場合には、爪先センサー2は、接地状態として検出する(温度が閾地未満である場合には離隔状態として検出する)。
【0075】
あるいは、爪先センサー2が距離センサー素子を備える場合には、距離センサー素子が爪先と床面12との距離を測定する。距離が閾値未満である場合には、爪先は床面12にほぼ接地している状態といえ、距離が閾値以上である場合には、爪先は床面12から離隔している状態といえる。このように、爪先センサー2は、距離センサー素子が測定する距離が閾値以上であるか閾値未満であるかによって、爪先の離隔及び接地の少なくとも一方を検出する。
【0076】
また、爪先センサー2が光センサー素子を備える場合には、光センサー素子が検出する光量や輝度によって、爪先センサー2は、接地および離隔の少なくとも一方を検出する。爪先が床面12に接地している場合には、光センサー素子は、低い光量や輝度しか検出できない。逆に爪先が床面12から離れている場合には、光センサー素子は、高い光量や輝度を検出できる。このため、光センサー素子が閾値以上の光量や輝度を検出する場合には、爪先センサー2は、爪先が床面12から離隔しているとして検出し、光センサー素子が閾値未満の光量や輝度しか検出できない場合には、爪先センサー2は、爪先が床面12に接地しているとして検出する。
【0077】
このように、種々のセンサー素子を用いることで、爪先センサー2は、接地および離隔の少なくとも一方を検出できる。なお、上述のセンサー素子およびその検出手順は一例であり、他の種々の素子や手段が用いられても良い。あるいは、複数の異なるセンサー素子の組み合わせによって、爪先センサー2は、接地および離隔の少なくとも一方を検出しても良い。
【0078】
なお、踵センサー3は、爪先センサー2と同様の構成・機能を有し、上述のような処理手順によって、足底11の踵側の接地および離隔の少なくとも一方を検出する。
【0079】
なお、爪先センサー2および踵センサー3のそれぞれは、単一の素子によって接地および離隔の少なくとも一方を検出しても良いし、複数の素子によって接地および離隔の少なくとも一方を検出しても良い。また、爪先センサー2および踵センサー3のそれぞれは、接地を検出する素子と離隔を検出する素子とを、異なる素子として、備えても良い。
【0080】
爪先センサー2は、検出結果を第1信号として、検出部5に出力する。踵センサー3は、検出結果を第2信号として、検出部5に出力する。このとき、爪先センサー2および踵センサー3のそれぞれからは、無線通信、有線通信などによって、第1信号および第2信号が検出部5に出力される。
【0081】
(検出部)
検出部5は、第1信号と第2信号とに基づいて、足底11の接地パターンを検出する。第1信号は1ビットの信号であり、第2信号は1ビットの信号であるので、検出部5は、2ビットの信号によって、4値(4種類)の状態を含む接地パターンを検出できる。4種類の接地パターンは、図2を用いて説明した通りである。
【0082】
図3は、本発明の実施の形態1における検出部での検出に関するタイミングチャートである。図3のタイミングチャートは、1ビット(2値)の第1信号と1ビット(2値)の第2信号とを示している。2ビットの信号の2値も示しており、2値の状態によって、検出部5は、接地パターンである、「遊脚状態」、「踵接地状態」、「爪先接地状態」、「足底接地状態」を検出する。
【0083】
図3において、第1信号および第2信号の値「1」は、爪先センサー2および踵センサー3のそれぞれが床面12に接地している状態を示しており、第1信号および第2信号の値「0」は、爪先センサー2および踵センサー3のそれぞれが床面12から離隔している状態を示している。
【0084】
第1信号と第2信号との2ビットの信号(第1信号、第2信号)が、値(0、0)の場合には、検出部5は、「遊脚状態」として検出し、値(0、1)の場合には、「踵接地状態」として検出し、値(1,0)の場合には、「爪先接地状態」として判定し、値(1、1)の場合には、「足底接地状態」として検出する。
【0085】
このように、爪先センサー2および踵センサー3からの信号を、2ビットのデジタル信号として取り扱うことで、簡便な電子素子、電子回路および半導体集積回路(あるいはソフトウェア)によって、検出部5は、接地パターンを容易かつ確実に検出できる。
【0086】
検出部5は、検出結果を、判定部6に出力する。このとき、4種類の接地パターンを2ビットのデジタル信号で出力しても良いし、その他の信号として出力しても良い。なお、ここでは、検出部5が、4種類の接地パターンを判定した上で判定部6にその結果を出力することで説明した。しかし、検出部5は、検出した爪先センサー2および踵センサー3からの信号を、2ビットの信号に変換して判定部6に出力し、判定部6が、4種類の接地パターンを検出しても良い。
【0087】
次に、接地パターンと動作パターンとに基づく歩行遊脚状態の判定の詳細について説明する。
【0088】
(第1条件に基づく場合)
判定部6(もしくは検出部5)は、複数の接地パターンの内、足底全部が地面から離隔している「遊脚状態」を判定する。判定部6(検出部5)は、図3を用いて説明したように、2ビット信号が(0、0)である場合に、接地パターンを「遊脚状態」として判定する。判定部6は、歩行遊脚状態であるかを判定する判定対象となる遊脚状態に加えて、第1条件を用いて、判定対象となる遊脚状態が歩行遊脚状態であるか否かを判定する。
【0089】
判定部6は、第1条件に基づく場合では、判定対象となる遊脚状態の直前の接地パターンが踵接地状態および足底接地状態のいずれかである場合には、この遊脚状態を、非歩行遊脚状態と判定する。一方、判定部6は、判定対象となる遊脚状態の直前の接地パターンが爪先接地状態である場合には、この遊脚状態を歩行遊脚状態として判定する。
【0090】
図4は、本発明の実施の形態1における第1条件に基づく場合の判定を説明する説明図である。図2(a)は、判定対象となる遊脚状態の直前が踵接地状態である場合を示し、図2(b)は、判定対象となる遊脚状態の直前が足底接地状態である場合を示し、図2(c)は、判定対象となる遊脚状態の直前が爪先接地状態である場合を示している。
【0091】
健常者は、歩行において足底が地面や床面から離隔する状態(遊脚状態)に至る接地パターンは様々である。例えば、健常者は、遊脚状態の直前を爪先接地状態とすることもあり(このパターンが多いと考えられる)、場合によっては、遊脚状態の直前を踵接地状態や足底接地状態とすることもある。健常者は、通常歩行、早足、ステップなど様々な歩行パターンを用いるからである。あるいは、歩行状態ではなく、立ち話している際に足を上げるようなパターン(遊脚状態の直前が足底接地状態)であるときに、膝関節の固定がなされていなくても、健常者は特段の危険を受けるものではない。
【0092】
ポリオや事故などの種々の要因によって下肢に不自由を有する使用者も、歩行状態である場合には、遊脚状態の直前を爪先接地状態とすることが多いと考えられる。このため、図4(c)のように、判定部6は、判定対象となる遊脚状態の直前が爪先接地状態である場合には、この遊脚状態を歩行遊脚状態として判定する。
【0093】
一方、ポリオや事故などの種々の要因によって下肢に不自由を有する使用者は、歩行状態ではなく立ち止まっている状態で足を上げるようなパターン(遊脚状態の直前が足底接地状態である)、後ろにつんのめるパターン(遊脚状態の直前が踵接地状態である)などにおいて、膝関節の固定が解除されることは、使用者に不安や危険を抱かせる。下肢の不自由な使用者は、膝関節の固定によって立脚を安定させているからである。膝関節の固定が解除されると、使用者は、立脚を安定させることが難しくなり、不安や危険を感じる。
【0094】
このため、図4(a)のように、判定対象の遊脚状態の直前が踵接地状態である場合には、使用者が後ろにつんのめっている状態である可能性もある、として判定部6は、この遊脚状態を非歩行遊脚状態であると判定する。さらに、図4(b)のように、判定対象の遊脚状態の直前が足底接地状態である場合には、使用者が立ち話中に足をあげた状態である可能性もある、として判定部6は、この遊脚状態を非歩行遊脚状態であると判定する。もちろん、実際の歩行遊脚状態である場合もあるが、下肢に不自由を有する使用者の安全性を優先して、判定部6は、この遊脚状態を非歩行遊脚状態として判定することが好ましい。
【0095】
このように、第1条件に基づく場合では、判定部6は、判定対象となる遊脚状態の直前の接地パターンの種類によって、この遊脚状態を歩行遊脚状態もしくは非歩行遊脚状態として判定する。
【0096】
(第2条件に基づく場合)
判定部6は、第2条件に基づく場合には、判定対象となる遊脚状態の時間的に前における所定の種類の接地パターンの継続時間によって、歩行遊脚状態もしくは非歩行遊脚状態を判定する。
【0097】
(判定その1)
判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかでは、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態であると判定する。ここで、第1時間は、第2時間よりも長い。
【0098】
図5は、本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。
【0099】
通常の歩行では、図2に示されるように、踵接地状態に示されるように足が地面に接地を開始し、ついで足底接地状態に示されるように足底全部が地面に接地し、次いで爪先接地状態に示されるように足底が地面からの離隔を開始して、最後に遊脚状態に示されるように足底全部が地面から離隔する。このように、判定対象となる遊脚状態の直前の接地パターンの種類によって、判定部6は判定するだけでもよさそうである(第1条件に基づく判定)。しかし、直前の接地パターンが歩行に関る一連の流れと同じであっても、必ずしも歩行状態であるとは限らない。
【0100】
図5(a)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第1時間以上である場合を示している。図5(a)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態が非常に長い場合には、使用者は、歩行状態にあるのではなく立脚した状態のまま足を上げたものと考えることもできる。立ち話中に、足を上げるなどの動作であると、考えることができる。
【0101】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図5(a)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0102】
図5(b)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第2時間未満である場合を示している。図5(b)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。
【0103】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図5(b)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0104】
図5(c)は、判定対象となる遊脚状態の直前の接地パターンの継続時間が第2時間以上第1時間未満である場合を示している。図5(c)では、判定対象となる遊脚状態の直前の接地パターンは、爪先接地状態である。この爪先接地状態の継続時間が、適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターンの継続時間は、所定範囲におさまりやすいからである。
【0105】
このため図5(c)に示すように、判定部6は、判定対象の遊脚状態の直前の接地パターンが第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0106】
このように、判定部6は、判定対象となる遊脚状態の直前の接地パターンの継続時間に基づいて、正確に歩行遊脚状態/非歩行遊脚状態を判定できるようになる。
【0107】
なお、図5は、直前の接地パターンを、爪先接地状態として示しているが、他の接地パターン(足底接地状態、踵接地状態)であっても同じである。判定対象の遊脚状態の直前である遊脚状態以外の接地パターンの継続時間によって、判定部6は、歩行遊脚状態/非歩行遊脚状態を判定する。
【0108】
(判定その2)
判定部6は、第2条件に基づく場合では、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0109】
なお、ここで継続時間の計測対象となる足底接地状態は、判定対象となる遊脚状態の直前でもよいし、他の接地パターンを挟んだ前であってもよい。すなわち、判定対象となる遊脚状態と計測対象となる足底接地状態の間に、他の接地パターン(踵接地状態や爪先接地状態)が含まれてもよい。
【0110】
図6は、本発明の実施の形態1における第2条件に基づく判定を説明する説明図である。図6は、判定対象となる遊脚状態の直前が足底接地状態である状態を示しているが、図面作成の都合によるものであって、上述の通り、足底接地状態と遊脚状態との間に他の接地パターンが含まれてもよい。また、第1時間は、第2時間よりも長い。
【0111】
図6(a)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第1時間以上である場合を示している。この足底接地状態が非常に長い場合には、使用者は、歩行状態にあるのではなく立脚した状態のまま足を上げたものと考えることもできる。例えば、立ち話中に足踏みするなどの動作であると、考えることができる。あるいは、前かがみになる際に、足が地面から離隔しただけの状態であって、歩行状態ではないと考えることもできる。
【0112】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図6(a)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0113】
図6(b)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第2時間未満である場合を示している。この足底接地状態が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。
【0114】
このような場合に、判定部6が判定対象の遊脚状態を、歩行遊脚状態であると判定することは、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。このため、図6(b)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0115】
図6(c)は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間が第2時間以上第1時間未満である場合を示している。この足底接地状態が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターンの継続時間は、所定範囲におさまりやすいからである。
【0116】
このため図6(c)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0117】
このように、判定部6は、判定対象となる遊脚状態の時間的に前の足底接地状態の継続時間に基づいて、正確に歩行遊脚状態/非歩行遊脚状態を判定できるようになる。
【0118】
以上の判定その1、判定その2は、第2条件に基づく場合の一例であり、使用者の障害の特性や使用者の歩き方の癖などに応じて、異なる手順が用いられてもよい。
【0119】
(第3条件に基づく場合)
判定部6は、第3条件に基づく場合には、ある接地パターンから他の接地パターンへの変移時間(ある接地パターンが開始されてから、次の接地パターンが開始されるまでの時間)に基づいて、判定対象の遊脚状態を、歩行遊脚状態/非歩行遊脚状態として判定する。
【0120】
健常者でも下肢に不自由を有する使用者であっても、歩行状態にある場合には、踵接地状態、足底接地状態、爪先接地状態、遊脚状態、の出現順序で、接地パターンを出現させることが多い。ここで、この出現順序が、通常の歩行状態で現れる場合には、ある接地パターンから他の接地パターンへの変移時間は、所定時間内に収まることが普通である。あるいはある接地パターンから他の接地パターンへの変移時間は、接地パターンの別なく、大体一定のリズムに収まることが普通である。
【0121】
これに対して、ある接地パターンから他の接地パターンへの変移時間が、極端に長かったり極端に短かったりする場合には、通常の歩行状態ではなかったり、イレギュラーな状態である可能性が高い。このような歩行状態でなかったりイレギュラーな状態であったりする場合に、判定部6が歩行遊脚状態であるとの判定を行って膝関節の固定が解除されることは、下肢に不自由を有する使用者へ不安や危険を与えかねない。
【0122】
このため第3条件は、このようなある接地パターンから他の接地パターンへの変移時間に着目した条件である。
【0123】
(判定その1)
判定部6は、第3条件に基づく場合には、判定対象となる遊脚状態の時間的に前における踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、この踵接地状態から足底接地状態までの変移時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0124】
ここで、第1時間は、第2時間よりも長い。
【0125】
図7は、本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。図7は、作図の便宜のために、遊脚状態の直前が、足底接地状態であり、その前が踵接地状態である場合を示している。実際には、足底接地状態と遊脚状態との間に、爪先接地状態が含まれていてもよい。
【0126】
図7(a)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が第1時間以上である場合を示している。この変移時間が非常に長い場合には、使用者は、歩行を開始したのではなく立脚状態であるときに足の疲れに対応するために足底を地面につけただけである可能性がある。あるいは、立脚状態から前かがみになっただけであったり、前のめりになってしまっただけであったりする。あるいは、使用者は、足底の接地状態を入れ替えながら、立脚しているだけということも考えられる。
【0127】
このような場合に、判定部6が次に現れる遊脚状態を歩行遊脚状態であると判定すると、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。あるいは、前かがみや前のめりになっているときの安定性が損なわれる問題もある。このため、図7(a)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が、第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0128】
図7(b)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態までの変移時間が第2時間未満である場合を示している。この変移時間が非常に短い場合には、使用者は、転倒しそうな危険状態であると考えることもできる。あるいは、立脚状態でありながら、足底の接地状態を変化させているだけとも考えられる。図7(b)から受ける印象の通り、踵接地状態から足底接地状態への変移時間が短いことは、歩行状態のリズムから見て違和感がある。
【0129】
このような場合に、判定部6が、判定対象の遊脚状態を、歩行遊脚状態であると判定することは、使用者の安定を損なうことになってしまう。このため、図7(b)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0130】
図7(c)は、判定対象となる遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間以上第1時間未満である場合を示している。このように変移時間が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターン同士の変移時間は、所定範囲におさまりやすいからである。
【0131】
このため図7(c)に示されるように、判定部6は、判定対象の遊脚状態の時間的に前の踵接地状態から足底接地状態への変移時間が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0132】
(判定その2)
判定部6は、第3条件に基づく場合では、判定対象となる遊脚状態の時間的に前における足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、この遊脚状態を、非歩行遊脚状態として判定する。また、判定部6は、この足底接地状態から爪先接地状態までの変移時間が、第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0133】
ここで、第1時間は、第2時間よりも長い。
【0134】
図8は、本発明の実施の形態1における第3条件に基づく判定を説明する説明図である。図8は、説明の便宜のために、遊脚状態の直前が、爪先接地状態であり、その前が足底接地状態である場合を示している。歩行状態において出現しやすい接地パターンの出現順序と考えられる。
【0135】
図8(a)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が第1時間以上である場合を示している。この変移時間が非常に長い場合には、使用者は、歩行を開始したのではなく立脚状態であるときに足踏みのために踵を上げただけである可能性がある。あるいは、立脚状態から前かがみになっただけであったり、前のめりになってしまっただけであったりする。
【0136】
このような場合に、判定部6が次に現れる遊脚状態を歩行遊脚状態であると判定すると、立脚状態であるにもかかわらず使用者の膝関節の固定が解除されることになり、使用者は安定した立脚状態を維持できなくなる。あるいは、前かがみや前のめりになっているときの安定性が損なわれる問題もあるこのため、図8(a)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が、第1時間以上である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0137】
図8(b)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態までの変移時間が第2時間未満である場合を示している。この変移時間が非常に短い場合には、使用者は、前のめりにつんのめった状態であると考えることもできる。あるいは、歩行状態ではないにも関らず、使用者が危険な状態に陥ったものと考えることもできる。図8(b)からの印象の通り、足底接地状態から爪先接地状態への変移時間が短いことは、歩行状態のリズムから見て違和感がある。
【0138】
このような場合に、判定部6が、判定対象の遊脚状態を、歩行遊脚状態であると判定することは、使用者の安定を損なうことになってしまう。このため、図8(b)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間未満である場合には、この遊脚状態を、非歩行遊脚状態として判定する。
【0139】
図8(c)は、判定対象となる遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間以上第1時間未満である場合を示している。このように変移時間が適度な時間量に含まれる場合には、使用者は歩行状態にあると考えられる。歩行においては、一定のリズムに基づいて、接地パターンが変化していくからであり、一定のリズムによってそれぞれの接地パターン同士の変移時間は、所定範囲におさまりやすいからである。
【0140】
このため図8(c)に示すように、判定部6は、判定対象の遊脚状態の時間的に前の足底接地状態から爪先接地状態への変移時間が第2時間以上第1時間未満である場合には、この遊脚状態を、歩行遊脚状態として判定する。
【0141】
(第4条件に基づく場合)
判定部6は、第4条件に基づく場合では、判定対象となる遊脚状態とこの遊脚状態の時間的に前における遊脚状態との期間(以下、出現期間)の接地パターンの出現順序が、(1)踵接地状態、(2)足底接地状態、(3)爪先接地状態の順序である場合には、この遊脚状態を非歩行遊脚状態であると判定する。また、判定部6は、この出現期間における接地パターンが、(1)足底接地状態、(2)爪先接地状態の順序である場合には、この遊脚状態を、歩行遊脚状態であると判定する。
【0142】
障害の原因や障害の程度によって相違するが、下肢に不自由を有する使用者は、歩行状態である場合の接地パターンの出現順序において、踵接地状態を含まないことがある。すなわちこのような使用者は、遊脚状態の次に踵から地面に接地させるのではなく、遊脚状態の次に即座に足底全体を地面に接地させる。これは、膝関節の固定や下肢の不自由によって引き起こされうる現象である。このため、判定部6は、遊脚状態から遊脚状態までの出現期間において、踵接地状態が含まれず、更には、(1)足底接地状態、(2)爪先接地状態の順序である場合には、遊脚状態を歩行遊脚状態として判定する。
【0143】
図9は、本発明の実施の形態1における第4条件にもとづく判定を説明する説明図である。
【0144】
図9(a)は、出現期間において、(1)踵接地状態、(2)足底接地状態、(3)爪先接地状態の順序で、接地パターンが出現する。図9(a)では、出現期間が踵接地状態から始まっており、下肢に不自由を有する使用者の歩行状態ではないと考えられる。このような場合に、この出現順序の後の遊脚状態(判定対象となる遊脚状態)が、歩行遊脚状態であると判定することは、歩行状態でないにも関らず膝関節の固定が解除される恐れがある。このため、判定部6は、図9(a)に示される出現順序の場合には、判定対象の遊脚状態を、非歩行遊脚状態として判定する。
【0145】
図9(b)は、出現期間において、(1)足底接地状態、(2)爪先接地状態の順序で、接地パターンが出現する。この出現順序は、下肢に不自由を有する使用者の歩行状態を示していると考えられる。このため、判定部6は、図9(b)に示される出現順序の場合には、判定対象の遊脚状態を、歩行遊脚状態として判定する。
【0146】
以上のように、第4条件を考慮することで、判定部6は、使用者への不安や危険を排除して、歩行遊脚状態を判定できる。
【0147】
第2条件および第3条件で用いられる第1時間および第2時間のそれぞれの時間的長さは、適宜定められればよい。これらは、実際の動作検出装置の設計において定められればよく、可変状態でプログラミングされておくことも好適である。例えば、記憶部7は、判定部6が用いるこの第1時間と第2時間を記憶する。このとき、複数の時間量に基づく第1時間と第2時間を記憶しておき、判定部6は、必要に応じて複数の第1時間と第2時間のそれぞれを選択して用いても良い。また、記憶部7は、第1時間および第2時間のそれぞれを書き換え可能に記憶しても良い。この場合には、実際の使用者が、自らの経験に基づいて第1時間と第2時間を入力する。このように、第1時間や第2時間といったパラメータは、設計段階、製造段階、使用段階の様々なステージで、柔軟に定められれば良い。
【0148】
以上では、第1条件〜第4条件のそれぞれを個別に説明したが、判定部6は、第1条件〜第4条件の2以上を適宜組み合わせることで、判定対象となる遊脚状態を、歩行遊脚状態もしくは非歩行遊脚状態として判定しても良い。
【0149】
また、第1条件〜第4条件のそれぞれの詳細な要素は、記憶部7に記憶されていることも好適である。判定部6は、必要に応じて記憶部7からこれらの要素を読み出すことで、第1条件〜第4条件の少なくとも一つを用いて、歩行遊脚状態を判定できる。
【0150】
なお、検出部5、判定部6および記憶部7は、一体であっても別体であってもよい。これらは、専用の電子基板、電子回路、半導体集積素子などのハードウェアで構成されてもよいし、その一部もしくは全部がソフトウェアで構成されても良い。もし、ソフトウェアで構成される場合には、CPUやDSPのような演算処理装置が設けられ、この演算処理装置が、ソフトウェアを実行させる。
【0151】
以上のように、実施の形態1における動作検出装置は、下肢装具などの膝関節固定を解除するタイミングの基準となる歩行遊脚状態を、足底が離隔している接地パターンだけでなく使用者の動作パターンである第1条件〜第4条件の少なくとも一つを用いて判定する。この結果、下肢に不自由を有する使用者が、下肢装具などを使用する際に、使用者への不安や危険を生じさせることを、著しく低減できる。
【0152】
(実施の形態2)
【0153】
次に、実施の形態2について説明する。
【0154】
実施の形態2では、判定部6の判定を制御する処理について説明する。
【0155】
図10は、本発明の実施の形態2における動作検出装置のブロック図である。図10は、図1で説明した動作検出装置に比較して、選択部20および入力手段21が追加されている。
【0156】
選択部20は、判定部6が、歩行遊脚状態/非歩行遊脚状態の判定において用いる第1条件〜第4条件を切り替える。実施の形態1で説明した通り、判定部6は、第1条件〜第4条件の少なくとも一つを用いて、歩行遊脚状態/非歩行遊脚状態を判定する。このとき、第1条件〜第4条件のいずれを用いるか、あるいは第1条件〜第4条件のいずれを組み合わせて用いるかは、使用者、使用状況などによって選択されることが好適である。
【0157】
選択部20は、第1条件〜第4条件のいずれを用いるかを選択する。選択部20は、判定部6の処理に基づいて、第1条件〜第4条件のいずれを用いるかを選択する。例えば、判定部6は、プログラムを動作させる演算処理装置を有している場合には、この動作の元となるプログラムの処理手順に従って、選択部20での選択方式を決定する。
【0158】
また、選択部20は、使用者の年齢、障害程度、性別、特性などのデータに基づき、所定の処理手順によって、第1条件〜第4条件のいずれかを選択する。これらの使用者の年齢、障害程度、性別、特性などのデータは、入力手段21から入力される。実際に、この動作検出装置1(あるいはこれを備える下肢装具)を使用する使用者が、この入力手段を通じて、これらのデータを入力する。
【0159】
また、使用者は、入力手段21を通じて、選択部20における選択動作を操作しても良い。例えば、使用者は、入力手段に第1条件〜第4条件の内、いずれかの条件を用いることを入力する。この入力によって、選択部20は、使用者の所望している条件を選択して、判定部6での判定を行わせる。
【0160】
このように、使用者の入力や製造者や補助者による入力によって、使用者に最適な条件が選択される。この結果、動作検出装置1は、膝関節の固定を解除する使用者にとって最適なタイミングを検出することができるようになる。
【0161】
なお、入力手段21は、動作検出装置1に備えられても良いし、リモコンや操作装置として、動作検出装置1と別体で実現されても良い。
【0162】
また、実施の形態1、2で説明された動作検出装置1の一部もしくは全部は、下肢に不自由を有する使用者が装着する下肢装具に組み込まれて実装される。
【0163】
(実施の形態3)
【0164】
次に、実施の形態3に付いて説明する。
【0165】
実施の形態3では、実施の形態1、2で説明された動作検出装置を用いた、膝固定解除装置について説明する。なお、ここでいう膝固定解除装置とは、主に膝関節を固定する固定状態を解除する装置をいう。このため、一般的には、膝関節の折れ曲がりを停止させるために固定されている固定状態を解除する装置を示す(すなわち、膝固定解除装置は、膝関節固定解除装置との概念を含むので、膝関節固定解除装置と言い換えることも可能である)。もちろん、膝関節に特化した固定ではなく、下肢の不自由な使用者の膝の姿勢を固定する固定状態を解除する装置を幅広く含むものである。
【0166】
図11は、本発明の実施の形態3における固定解除装置とその周辺要素の模式図である。図11は、膝固定解除装置30と、膝固定解除装置30が固定解除の対象とする下肢装具とを合わせて示している。なお、作図の都合上、発明者が実際に試作した下肢装具50の写真に対して作用する膝固定解除装置30をブロック図として表している。実際には、膝固定解除装置30(およびこの膝固定解除装置30が備える動作検出装置1)は、この下肢装具50に組み込まれて実装されれば良い。
【0167】
下肢装具50は、使用者の膝関節を固定する固定部40を備えている。固定部40は、膝関節を固定したり、この固定を解除したりできる。膝固定解除装置30は、この固定部の解除を指示する。解除においては、膝固定解除装置30は、膝関節の固定部40の固定を解除するための信号を出力すれば良い。
【0168】
膝固定解除装置30は、実施の形態1、2で説明された動作検出装置1を備えている。動作検出装置1は、実施の形態1、2で説明したように膝関節の固定を解除するタイミングを示す歩行遊脚状態を検出する。動作検出装置1は、歩行遊脚状態を検出する場合には、この検出結果を示す信号を、解除部31に出力する。解除部31は、膝関節の固定部40にその固定を解除する信号を出力する。固定部40は、この解除信号に基づいて、膝関節の固定を解除する。
【0169】
なお、固定部40は、通常は膝関節を固定しておき、膝固定解除装置30からの解除信号を受けて、固定を解除しても良い。あるいは、膝固定解除装置30からの非解除信号を受ける場合には膝関節を固定し、膝固定解除装置30からの解除信号を受ける場合には膝関節の固定を解除しても良い。
【0170】
また、膝固定解除装置30は、解除を指示する信号を固定部40に出力するだけではなく、固定部40が膝関節を固定する作用を生じさせる動作そのものを解除する処理を行っても良い。
【0171】
(強制解除)
【0172】
また、解除部31は、使用者によって強制的に固定を解除する強制解除機構を有していてもよい。
【0173】
解除装置30は、動作検出装置1を備えることで、自動的に検出された歩行遊脚状態のタイミングで、固定部40での固定を解除できる。このため、使用者は、特段の操作をすることなく、膝関節の固定と解除を受けることができる。しかしながら、場合のよっては、使用者の意思に伴って膝関節の固定が解除されることが好ましい場合もある。前に大きくかがんだり、椅子に座ったりするような場合である。
【0174】
強制解除機構は、解除部31からの解除信号を強制的に「ON」にしたり、固定部40の固定機構を解除したりすることで、膝関節の固定を強制的に解除できる。このように、解除部31が強制解除機構を備えることで、使用者にとってユーザビリティの高い下肢装具を実現できる。また、強制解除機構は、種々の公知技術を用いても良い。
【0175】
ここで、強制解除機構は、解除部31に備えられても良いし、固定部40に備えられてもよい。いずれであっても、膝関節の強制解除という目的を達成できればよい。
【0176】
以上のように、実施の形態1、2で説明された動作検出装置1を備える膝固定解除装置30は、使用者の実際の歩行状態に最適に合致した、膝固定の解除を実現できる。なお、公知技術の膝固定解除装置や汎用に用いられている膝固定解除装置に、実施の形態1、2で説明された動作検出装置1が取り付けられることで、実施の形態3で説明した膝固定解除装置30が容易に実現できる。
【0177】
(実施の形態4)
【0178】
次に、実施の形態4について説明する。実施の形態4では、実施の形態3で説明した膝固定解除装置30を備える下肢装具について説明する。
【0179】
図12は、本発明の実施の形態4における下肢装具の写真である。図12に示される下肢装具50は、発明者が実際に試作したものである。
【0180】
下肢装具50は、使用者の大腿部および下腿部の少なくとも一部を覆う本体部55と、実施の形態1〜2で説明された動作検出装置1と、この動作検出装置1を含む実施の形態3で説明された膝固定解除装置30と、膝関節を固定する固定部40と、を備える。図12に示されるように、下肢装具50は、人体の足の周囲を固定できるような外形を有している。
【0181】
本体部55は、使用者の大腿部および下腿部の少なくとも一部を覆うことで、使用者の膝関節の上下のそれぞれにおいて、第1装着部54と第2装着部53が備えられている。第1装着部54と第2装着部53のそれぞれは、バンドを有しており、大腿部や下腿部の周囲に装着して、下肢装具50を使用者に固定できる。バンドは、面ファスナーなどによって固定されれば良い。この第1装着部54と第2装着部53とによって、膝関節が挟まれる。
【0182】
また、第1装着部54と第2装着部53とは、フレーム51によって接続されている。このフレーム51が使用者の下肢に沿って下肢装具50を取り付けることができる。フレーム51は、後述の継ぎ手41において大腿部側の部材と下腿部側の部材とに分かれている。この継ぎ手41が伸長していると、大腿部側の部材と下腿部側の部材とが直進状態となる。継ぎ手41が折れ曲がると、大腿部側と下腿部側の部材とが屈曲状態となる。
【0183】
膝関節を固定する固定部40は、第1装着部54と第2装着部53とに挟まれる位置に設けられる。固定部40は、継ぎ手41を備えており、この継ぎ手41の伸長が膝関節の固定を生じさせ、この継ぎ手41の折れ曲がりが膝関節の固定解除を生じさせる。
【0184】
継ぎ手41は、フレーム51を大腿部から下腿部にひきつける内蔵ばねによって、常にロックされている。このロックによって、継ぎ手41は、フレーム51の立脚方向を固定する。すなわち、継ぎ手41は、膝関節を固定する。継ぎ手41は、この内蔵ばねの弾性力を失うことで、フレーム51の立脚方向への直進性が失われる。この結果膝関節の固定が解除されて、使用者は、膝関節を折り曲げることが可能となる。
【0185】
膝固定解除部40は、この内蔵ばねを大腿部側に引き寄せる作用によって、継ぎ手41の伸長を解消させて膝関節の固定を解除する。例えば、膝固定解除部40は、内蔵ばねを、大腿部側に引き寄せるモーター駆動を行う。これは、動作検出装置1が歩行遊脚状態であることを検出した場合に行われる。動作検出装置1による歩行遊脚状態の検出は、実施の形態1、2で説明した通りである。
【0186】
また、フレーム51の大腿部側の部材と下腿部側の部材とが継ぎ手41で接続されることで、継ぎ手41の伸長と屈曲が、膝関節の固定と解除を生み出すことも好適であるが、継ぎ手41以外の種々の機構が用いられても良い。例えば、嵌合によるロック機構を、固定部40が備えており、膝固定解除装置30からの操作によって嵌合が外れると、固定部40は、膝関節の固定を解除するなどである。
【0187】
(下肢装具の使用状態の説明)
【0188】
次に、発明者が試作した下肢装具の使用状態について説明する。
【0189】
図13は、本発明の実施の形態4における下肢装具を装着した踵接地状態を示す写真である。使用者は、下肢装具50を自分の下肢に装着している。装着においては、第1装着部54、第2装着部53が用いられる。下肢装具50は、固定部40を備えており、固定部40は、継ぎ手41の伸長と屈曲とによって、膝関節の固定とその解除を切り替える。膝固定解除装置30は、動作検出装置1を備えており、動作検出装置1が歩行遊脚状態を検出する場合に、膝関節の固定を解除する。それ以外の場合では、常時、膝関節を固定しておく。膝固定解除装置30およびこれが備える動作検出装置1は、電子基板、電子回路、演算処理装置によるソフトウェアとして、筐体の中に格納される。
【0190】
図13では、踵61が地面に接地しており踵接地状態であるので、動作検出装置1は、歩行遊脚状態ではないと判定している。このため、膝固定解除装置30は、固定部40における固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0191】
図14は、本発明の実施の形態4における下肢装具を装着した足底接地状態を示す写真である。なお、説明が重複する要素については、符号を省略している。使用者は、図13の場合と同様に、下肢装具50を自分の下肢に装着している。ここで、図14では、足底62の全体が地面に接地しており、足底接地状態である。このため、動作検出装置1は、歩行遊脚状態ではないと判定するので、膝固定解除装置30は、固定部40による固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0192】
図15は、本発明の実施の形態4における下肢装具を装着した爪先接地状態を示している。なお、説明が重複する要素については、符号を省略している。使用者は、下肢装具50を自分の下肢に装着している。ここで、図15では、爪先63が地面に接地しており、爪先接地状態である。このため、動作検出装置1は、歩行遊脚状態ではないと判定するので、膝固定解除装置30は、固定部40による固定を継続させる。すなわち、継ぎ手41は、伸長状態を継続する。このため、下肢装置50は、膝関節を伸長した状態で固定している。
【0193】
図16は、本発明の実施の形態4における下肢装具を装着した非歩行遊脚状態を示している。なお、説明が重複する要素については、符号を省略している。使用者は、下肢装具50を自分の下肢に装着している。ここで、図16では、足底62が全て地面から離隔している。しかしながら、足底が離隔している場合でも、歩行状態による場合ではなく、使用者がつんのめったり、足を上げただけだったりすることもある。
【0194】
実施の形態1、2で説明したように、動作検出装置1は、使用者の動作パターンも考慮して、足底62全体が地面から離隔している場合でも、非歩行遊脚状態であると判定することもある。図16では、動作検出装置1が、非歩行遊脚状態であると判定している。このため、膝固定解除装置30は、継ぎ手41の伸長をそのままに継続させる。この結果、下肢装置50は、膝関節を伸長した状態で固定している。
【0195】
図17は、本発明の実施の形態4における下肢装具を装着した歩行遊脚状態を示している。使用者は、下肢装具50を自分の下肢に装着している。ここで図17では、足底62全体が地面から離隔しており、かつ動作検出装置1が、歩行遊脚状態であると判定している。動作検出装置1は、実施の形態1、2で説明された手順で歩行遊脚状態を検出する。
【0196】
この結果、膝固定解除装置30は、膝関節の固定を解除する。例えば、膝固定解除装置30は、継ぎ手41の弾性力を解除して継ぎ手41を屈曲させる。この結果、図17に示されるとおり、膝関節は屈曲することができ、使用者は、楽に歩行できるようになる。
【0197】
以上のように、下肢装具50は、膝関節の固定を解除することが必要な場合のみを正確に検出した上で、使用者の膝関節を固定したり、固定を解除したりできる。結果として、下肢装具50は、使用者にとって、ユーザビリティの高い歩行での補助を与えることができる。
【0198】
以上、実施の形態1〜4で説明された動作検出装置、膝固定解除装置および下肢装具は、本発明の趣旨を説明する一例であり、本発明の趣旨を逸脱しない範囲での変形や改造を含む。
【符号の説明】
【0199】
1 動作検出装置
2 爪先センサー
3 踵センサー
4 判定手段
5 検出部
6 判定部
7 記憶部
10 足
11 足底
20 選択部
30 膝固定解除装置
31 解除部
40 固定部
41 継ぎ手
50 下肢装具
51 フレーム
53 第2装着部
54 第1装着部
55 本体部
【特許請求の範囲】
【請求項1】
使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、
前記足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、
前記爪先センサーからの第1信号と前記踵センサーからの第2信号とによって、前記足底の複数の接地パターンを検出する検出部と、
前記複数の接地パターンの内、前記足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、前記使用者の複数の動作パターンに基づいて、前記遊脚状態であることに加えて前記使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、
前記複数の動作パターンは、
(第1条件)判定対象となる前記遊脚状態の時間的に直前における前記接地パターンの種類、
(第2条件)判定対象となる前記遊脚状態の時間的に前における所定の種類の前記接地パターンの継続時間、
(第3条件)判定対象となる前記遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる前記遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む、動作検出装置。
【請求項2】
前記検出部は、
前記第1信号および前記第2信号のそれぞれが「接地」を示す場合には、前記接地パターンを、「足底接地状態」と判断し、
前記第1信号が「離隔」を示し、前記第2信号が「接地」を示す場合には、前記接地パターンを、「踵接地状態」と判断し、
前記第1信号が「接地」を示し、前記第2信号が「離隔」を示す場合には、前記接地パターンを、「爪先接地状態」と判断し、
前記第1信号および前記第2信号のそれぞれが「離隔」を示す場合には、前記接地パターンを、「遊脚状態」と判断する、請求項1記載の動作検出装置。
【請求項3】
前記判定部は、前記第1条件に基づく場合では、
判定対象となる前記遊脚状態の直前の接地パターンが前記踵接地状態および前記足底接地状態のいずれかである場合には、該遊脚状態を非歩行遊脚状態として判定し、
直前の接地パターンが前記爪先接地状態である場合には、該遊脚状態を、歩行遊脚状態として判定する、請求項2記載の動作検出装置。
【請求項4】
前記判定部は、前記第2条件に基づく場合では、
判定対象となる前記遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2又は3記載の動作検出装置。
【請求項5】
前記判定部は、前記第2条件に基づく場合では、
判定対象となる前記遊脚状態の時間的に前の前記足底接地状態が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2又は3記載の動作検出装置。
【請求項6】
前記判定部は、前記第3条件に基づく場合では、
判定対象となる前記遊脚状態の時間的に前における前記踵接地状態から前記足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2から5のいずれか記載の動作検出装置。
【請求項7】
前記判定部は、前記第3条件に基づく場合では、
前記判定対象となる前記遊脚状態の時間的に前における前記足底接地状態から前記爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2から5のいずれか記載の動作検出装置。
【請求項8】
前記判定部は、前記第4条件に基づく場合では、
判定対象となる前記遊脚状態と該遊脚状態の時間的に前における前記遊脚状態との期間の接地パターンが、前記踵接地状態、前記足底接地状態および前記爪先接地状態の順序である場合には、該遊脚状態を、非歩行遊脚状態であると判定し、
判定対象となる前記遊脚状態と該遊脚状態の時間的に前における前記遊脚状態との期間の接地パターンが、前記足底接地状態および前記爪先接地状態の順序である場合には、該遊脚状態を、歩行遊脚状態であると判定する、請求項2から7のいずれか記載の動作検出装置。
【請求項9】
前記第1条件、前記第2条件、前記第3条件および第4条件のいずれを用いるかを選択する、選択部を更に備える、請求項1から8のいずれか記載の動作検出装置。
【請求項10】
前記選択部は、前記使用者によって制御される、請求項9記載の動作検出装置。
【請求項11】
前記爪先センサーおよび前記踵センサーの少なくとも一方は、圧力センサー、温度センサー、距離センサーおよび光センサーの少なくとも一つを備える、請求項1から10のいずれか記載の動作検出装置。
【請求項12】
請求項1から11のいずれか記載の動作検出装置と、
前記使用者の膝関節を固定する固定部の固定を解除する解除部と、を備え、
前記解除部は、前記動作検出装置からの検出結果に基づいて、前記固定部による固定を解除する膝固定解除装置。
【請求項13】
前記解除部は、前記動作検出装置からの検出結果が「歩行遊脚状態」を示す場合には、前記固定部による固定を解除する、請求項12記載の膝固定解除装置。
【請求項14】
前記解除部は、前記使用者によって強制的に固定を解除する強制解除機構を備える、請求項12又は13記載の膝固定解除装置。
【請求項15】
請求項12から14のいずれか記載の膝固定解除装置と、
前記使用者の膝関節を固定する固定部と、
前記使用者の大腿および下腿の少なくとも一部を覆う本体部と、を備える膝固定解除機能付き下肢装具。
【請求項1】
使用者の足底の爪先側に設けられ、足底の爪先側の接地および離隔の少なくとも一方を検出する爪先センサーと、
前記足底の踵側に設けられ、足底の踵側の接地および離隔の少なくとも一方を検出する踵センサーと、
前記爪先センサーからの第1信号と前記踵センサーからの第2信号とによって、前記足底の複数の接地パターンを検出する検出部と、
前記複数の接地パターンの内、前記足底が地面から離隔している状態(以下、「遊脚状態」という)を判定し、前記使用者の複数の動作パターンに基づいて、前記遊脚状態であることに加えて前記使用者が歩行中である状態(以下、「歩行遊脚状態」という)を判定する判定部と、を備え、
前記複数の動作パターンは、
(第1条件)判定対象となる前記遊脚状態の時間的に直前における前記接地パターンの種類、
(第2条件)判定対象となる前記遊脚状態の時間的に前における所定の種類の前記接地パターンの継続時間、
(第3条件)判定対象となる前記遊脚状態の時間的に前における所定の接地パターンから異なる接地パターンへの変移時間、
(第4条件)判定対象となる前記遊脚状態と、該遊脚状態の時間的に前における遊脚状態との間における接地パターンの出現順序、
の、(第1条件)、(第2条件)、(第3条件)および(第4条件)の少なくとも一つを含む、動作検出装置。
【請求項2】
前記検出部は、
前記第1信号および前記第2信号のそれぞれが「接地」を示す場合には、前記接地パターンを、「足底接地状態」と判断し、
前記第1信号が「離隔」を示し、前記第2信号が「接地」を示す場合には、前記接地パターンを、「踵接地状態」と判断し、
前記第1信号が「接地」を示し、前記第2信号が「離隔」を示す場合には、前記接地パターンを、「爪先接地状態」と判断し、
前記第1信号および前記第2信号のそれぞれが「離隔」を示す場合には、前記接地パターンを、「遊脚状態」と判断する、請求項1記載の動作検出装置。
【請求項3】
前記判定部は、前記第1条件に基づく場合では、
判定対象となる前記遊脚状態の直前の接地パターンが前記踵接地状態および前記足底接地状態のいずれかである場合には、該遊脚状態を非歩行遊脚状態として判定し、
直前の接地パターンが前記爪先接地状態である場合には、該遊脚状態を、歩行遊脚状態として判定する、請求項2記載の動作検出装置。
【請求項4】
前記判定部は、前記第2条件に基づく場合では、
判定対象となる前記遊脚状態の直前の接地パターンの継続時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2又は3記載の動作検出装置。
【請求項5】
前記判定部は、前記第2条件に基づく場合では、
判定対象となる前記遊脚状態の時間的に前の前記足底接地状態が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2又は3記載の動作検出装置。
【請求項6】
前記判定部は、前記第3条件に基づく場合では、
判定対象となる前記遊脚状態の時間的に前における前記踵接地状態から前記足底接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2から5のいずれか記載の動作検出装置。
【請求項7】
前記判定部は、前記第3条件に基づく場合では、
前記判定対象となる前記遊脚状態の時間的に前における前記足底接地状態から前記爪先接地状態までの変移時間が、第1時間以上である場合および第2時間未満である場合のいずれかにおいては、該遊脚状態を、非歩行遊脚状態であると判定し、
前記第2時間以上前記第1時間未満である場合には、該遊脚状態を、歩行遊脚状態であると判定し、
前記第1時間は、前記第2時間よりも長い、請求項2から5のいずれか記載の動作検出装置。
【請求項8】
前記判定部は、前記第4条件に基づく場合では、
判定対象となる前記遊脚状態と該遊脚状態の時間的に前における前記遊脚状態との期間の接地パターンが、前記踵接地状態、前記足底接地状態および前記爪先接地状態の順序である場合には、該遊脚状態を、非歩行遊脚状態であると判定し、
判定対象となる前記遊脚状態と該遊脚状態の時間的に前における前記遊脚状態との期間の接地パターンが、前記足底接地状態および前記爪先接地状態の順序である場合には、該遊脚状態を、歩行遊脚状態であると判定する、請求項2から7のいずれか記載の動作検出装置。
【請求項9】
前記第1条件、前記第2条件、前記第3条件および第4条件のいずれを用いるかを選択する、選択部を更に備える、請求項1から8のいずれか記載の動作検出装置。
【請求項10】
前記選択部は、前記使用者によって制御される、請求項9記載の動作検出装置。
【請求項11】
前記爪先センサーおよび前記踵センサーの少なくとも一方は、圧力センサー、温度センサー、距離センサーおよび光センサーの少なくとも一つを備える、請求項1から10のいずれか記載の動作検出装置。
【請求項12】
請求項1から11のいずれか記載の動作検出装置と、
前記使用者の膝関節を固定する固定部の固定を解除する解除部と、を備え、
前記解除部は、前記動作検出装置からの検出結果に基づいて、前記固定部による固定を解除する膝固定解除装置。
【請求項13】
前記解除部は、前記動作検出装置からの検出結果が「歩行遊脚状態」を示す場合には、前記固定部による固定を解除する、請求項12記載の膝固定解除装置。
【請求項14】
前記解除部は、前記使用者によって強制的に固定を解除する強制解除機構を備える、請求項12又は13記載の膝固定解除装置。
【請求項15】
請求項12から14のいずれか記載の膝固定解除装置と、
前記使用者の膝関節を固定する固定部と、
前記使用者の大腿および下腿の少なくとも一部を覆う本体部と、を備える膝固定解除機能付き下肢装具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−81018(P2012−81018A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−229019(P2010−229019)
【出願日】平成22年10月8日(2010.10.8)
【出願人】(506087705)学校法人産業医科大学 (24)
【出願人】(591065549)福岡県 (121)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月8日(2010.10.8)
【出願人】(506087705)学校法人産業医科大学 (24)
【出願人】(591065549)福岡県 (121)
【Fターム(参考)】
[ Back to top ]