
動作練習支援装置及び動作練習支援方法
【課題】学習者の動作練習の効果を高めると共に、熟練者に必ずしも頼らなくても練習が可能な動作練習支援装置及び動作練習支援方法を提供すること。
【解決手段】学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段とを備えた構成において、該参考動作伝達手段には、該参考動作と該学習者動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段とを備え、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにする。
【解決手段】学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段とを備えた構成において、該参考動作伝達手段には、該参考動作と該学習者動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段とを備え、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、学習者の動作練習を支援する動作練習支援装置及び動作練習支援方法に関し、特に動作練習時の参考となる動作を学習者に伝達して効率的な動作練習を実現する技術に係る。
【背景技術】
【0002】
スポーツの訓練やリハビリテーションの場面において、学習者の動作の上達を促進させる器具や方法が様々知られている。従来、スポーツ訓練においては熟練者の運動を追随させることで、また、リハビリテーションにおいては健常者の運動を追随することで、上達を促進させようという試みが行われている。
しかしながら、熟練者と共に練習を行うことは、熟練者の手間やコストがかかりすぎて実際上は難しいことや、学習者と熟練者のレベルの差が大きすぎる場合もある。そのため実用化はそれほど進んでいない。
【0003】
非特許文献1に記載の従来技術では、力覚のインタラクションがあるが、マスタースレーブシステムとなっており、マスター側はスレーブ側よりも高い能力を要求するスレーブ側の上達のみを目的としたシステムで、一人一人に指導者となる熟練者や健常者が必要となる。従って、システムとしての構成をとっているだけで、従来の人同士で行う方法に比して効率的になるものではない。
【0004】
非特許文献2に記載の従来技術では、同レベルの人の協力によって両者の成績が向上する方法が記載されている。しかし、本技術は意思決定に係る課題であって、運動機能を対象としたものではなく、スポーツ訓練や身体機能のリハビリのような運動の訓練効果向上につながる技術ではない。
【0005】
また、特許文献1に開示される技術は、多様な状況に適応するリハビリテーション装置等に関し、3つの動作自由度で相互作用する力を加えるのに適し、かつその体積内の任意の点において運動を抑制し得る駆動制御機構を備える。この駆動制御機構は対象の運動を制御するように構成されており、対象による運動を支援したり、対象による運動に抵抗したり、対象による運動を案内したり、対象が動くように押して促す、などの動作を行う。
本技術によれば、対象の運動を制御することができるが、看者にフィードバックと支援とを提供する、という点以外に、特別なフィードバック方法等を示したものではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許公開2009-231647号公報
【非特許文献】
【0007】
【非特許文献1】Duong,Teraoka,Imamura,Miyoshi,Terashima,MASTER-SLAVESYSTEM WITH TELEOPERATION FOR REHABILITATION,proceeding of IFAC 2005,03663.
【非特許文献2】Bahrami B,Olsen K,LathamPE,Roepstorff,Rees G,Frith CD,Optimally interacting minds.,Science.2010Aug.27;329(5995):1081-5
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上記従来技術の有する問題点に鑑みて創出されたものであり、学習者の動作練習の効果を高めると共に、熟練者に必ずしも頼らなくても練習が可能な動作練習支援装置及び動作練習支援方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、学習者の動作練習を支援する動作練習支援装置であって、学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段とを備える。
本参考動作伝達手段には、上記参考動作と上記学習者動作とに偏差が生じた時に、所定の弾性係数によって偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段とを備える。
以上の構成において、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝える。
【0010】
上記の動作練習支援装置において、第1可動手段と略同一の可動部分を備えて参考動作に合わせて可動する第2可動手段を備え、参考動作を行う参考動作者の実際の動作を参考動作伝達手段に伝えるようにしてもよい。
【0011】
上記の参考動作が、同じ動作練習を行う参考動作者による動作であって、参考動作伝達手段において、参考動作弾性力発生手段で発生する弾性力の反作用力を、第2可動手段に付勢する学習者動作付勢手段を備えてもよい。本構成は第1可動手段と第2可動手段とを略同態様とするものであり、参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝えて参考動作者の動作練習も支援可能である。
【0012】
上記の動作練習支援装置において、学習者の動作練習の際に、学習者が追随した動作を行うための課題を生成する課題生成手段と、コンピュータの表示画面で課題を表示する課題表示手段と、第1可動手段に接続され、学習者動作の状態を取得する学習者動作取得手段と、コンピュータの表示画面で取得された学習者動作の状態を該課題と共に表示する学習者動作表示手段とを備える構成でもよい。
【0013】
本発明は次のような学習者の動作練習を支援する動作練習支援方法を提供することもできる。
すなわち、学習者が練習する際の学習者動作と、学習者が練習する際に参考となる参考動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させ、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝える。
【0014】
また、上記の参考動作が、同じ動作練習を行う参考動作者による動作であって、上記弾性力の反作用力を、参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝え、参考動作者の動作練習も支援するようにしてもよい。
【発明の効果】
【0015】
本発明は、以上の構成を備えることにより、次のような効果を奏する。
すなわち、熟練者や健常者等が行う参考動作と、学習者の行う学習者動作との偏差に応じて弾性力を発生させ、それを学習者に伝達することにより学習者の練習効果を向上せしめることができる。
また、弾性力はバネやゴム等によっても容易に実施可能であり、装置の簡便な構成及び低コストアップの要因を排除することができる。
【0016】
また、参考動作を、学習者と同様に動作練習を行う参考動作者による動作にしてもよいので、2人以上が同時に練習することもできる。本発明の構成によれば、参考動作が熟練者でなく、同レベルの者によって行われた場合でも、学習者、参考動作者の双方に練習効果があることが示された。そのため、従来のように熟練者が学習に立ち会う必要はなく、同レベルの学習者が自由に動作練習することができる。
また熟練者の動作のシミュレーションのために学習者の動作を計測する必要もなく、装置のコストアップを招くことがない。
【0017】
本発明の動作練習支援装置に、課題表示手段と学習者動作取得手段、学習者動作表示手段を備えることにより、学習者に対して課題の提示と、自己の動作の結果を視覚的に伝えることができる。本発明の参考動作のフィードバックと合わせて、学習者の練習効果の向上を図ることができる。
【図面の簡単な説明】
【0018】
【図1】本発明の原理を説明する説明図である。
【図2】本発明に係る動作練習支援装置の構成図である。
【図3】課題及び動作状態の表示画面の一例である。
【図4】本発明に係る動作練習支援装置(別実施例)の構成図である。
【図5】レベルの異なる二人の学習者による練習効果を示すグラフである。
【図6】参考動作伝達手段の有無による練習効果の差異を示すグラフである。
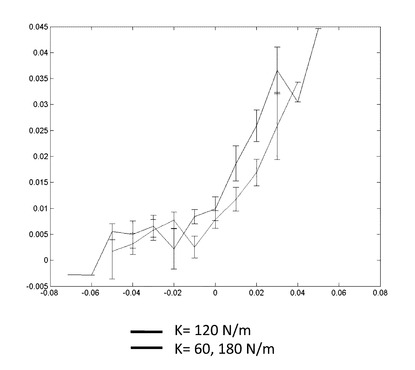
【図7】学習者間のレベルの差と練習効果、弾性係数の相関を示すグラフである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を、図面に示す実施例を基に説明する。なお、実施形態は下記に限定されるものではない。
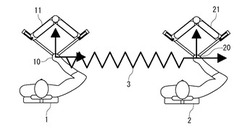
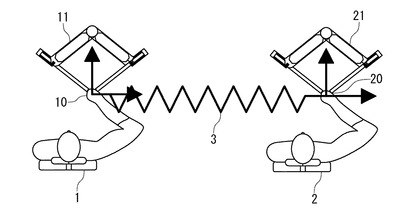
図1を用いて、本発明の原理を説明する。図中で左側は学習者(1)、右側には参考動作者(2)を示す。学習者は第1可動手段である第1操作ハンドル(10)を握り、参考動作者は第2可動手段である第2操作ハンドル(20)を握り、それぞれ操作する。
各操作ハンドル(10)(20)は、それぞれ2次元平面上で前後左右に自在に動作可能な第1リンク機構(11)と第2リンク機構(21)で支持される。
【0020】
本発明において、第1操作ハンドル(10)と第2操作ハンドル(20)が各々基準位置にあるときの偏差を0として、基準位置からの相対的位置が異なった場合の位置の偏差に従って、少なくとも学習者が動作させている第1操作ハンドル(10)に対して、弾性力を及ぼすようにする。
すなわち、参考動作と学習者動作とに偏差が生じた時に、その偏差に応じた弾性力を発生させる参考動作弾性力発生手段(具体的には図示せず)と、その弾性力を第1操作ハンドル(10)に伝達する参考動作付勢手段(具体的には図示せず)とを備える。
【0021】
参考動作弾性力発生手段と参考動作付勢手段との最も簡便な実施方法は、バネ又はゴムなどの弾性体を用いる方法である。本実施例の構成においては、第1操作ハンドル(10)・第2操作ハンドル(20)間に弾性体(3)を配設することができる。弾性体(3)は、両操作ハンドル(10)(20)が基準位置にあるときに自然長とすれば、偏差が生じた時に、弾性体の弾性係数に従って弾性力を生じさせ、弾性体(3)の端点を接続した第1操作ハンドル(10)に作用する。
【0022】
また、上記のように第1操作ハンドル(10)や第2操作ハンドル(20)を用いることなく、腕などの身体部位に直接バネ又はゴムなどの弾性体の端点を装着して弾性力を直接身体に作用させるようにしてもよい。
【0023】
本構成によると、学習者(1)から見た時、自己の動作が参考動作者の動作と完全に一致している場合には参考動作者からの影響を受けない一方、参考動作者との偏差が大きくなるとより強く、その偏差のベクトルと平行で偏差を小さくする向きに力を受ける。このため、学習者は、参考動作と自己の動作とが相異していることを認識できる。
なお、本発明の実施においては上記と逆向き、すなわち偏差のベクトルと平行で偏差を大きくする向きに学習者が力を受ける構成でもよい。この場合でも、学習者は、参考動作と自己の動作とが相異していることを認識でき、学習者が偏差を補正しようとする過程で学習者に対するフィードバック効果を有するものと考えられる。
【0024】
スポーツ訓練やリハビリといった、動作の練習を行う際に、熟練者の動作を真似て練習することが効果的であることは言うまでもなく、適当なリンク機構を用いて熟練者が学習者の動作を補助しながら練習することは行われている。
しかしながら、このような従来の方法では熟練者の動作が正確であることが前提であり、低い習熟レベルの学習者同士で練習しても効果は得られなかった。
【0025】
これに対して本発明は、弾性体(3)を介在させることで学習者に対する参考動作のフィードバックを変化させ、従来技術とは異なる効果があることを見出したものである。効果を示す実験結果については後述する。
【0026】
上記に示したように、第1操作ハンドル(10)と第2操作ハンドル(20)を弾性体(3)で接続した場合、学習者側の第1操作ハンドル(10)に弾性力が作用すると同時に、参考動作者側の第2操作ハンドル(20)にその反作用力が作用する。
さらに本発明では、このような構成において、学習者のみならず参考動作者の動作練習にも寄与することを見出した。すなわち、参考動作者(2)として、熟練者に限らず学習者と同様に動作練習を行う者が担当し、両者が共に動作練習を行うことを可能にした。
そのため、熟練者を必ずしも要さず、2人以上の学習者によって動作練習を行うことができる。
【0027】
なお、本発明の実施において参考動作に係る態様は上記に限定されない。
例えば、実在する参考動作者による動作ではなく、予め参考動作者の動作を記録し、その通りに第2可動手段を動かす構成でもよい。参考動作者の動作は、コンピュータ等のプログラムで生成した理想的な動作、あるいはそれに所定の変化を加えた人工的な動作でもよい。
【0028】
第2可動手段を備えない構成でもよい。すなわち、一人の学習者を対象とした装置では、第1可動手段だけを備えて、コンピュータ上で生成した参考動作の位置と、第1可動手段の位置との偏差に従って弾性力を計算し、アクチュエータなどで構成される参考動作弾性力発生手段が弾性力に相当する力を発生し、参考動作付勢手段が第1可動手段に作用する。
この場合でも、本発明の最も重要な点である弾性力を利用した学習者へのフィードバックが実現される。
【0029】
本発明が対象とする動作練習は、図1のように手を用いた平面動作に限らず、任意の動作練習に適用することができる。例えば、スポーツ訓練であれば、テニス、野球、卓球などにおける手腕の3次元運動、サッカー、スキー、スケート、ジョギングなどの足の3次元運動を対象としてもよい。楽器の演奏、書道等の所作の練習に用いてもよい。また、リハビリを目的として、公知の様々な動作練習に用いても良い。
【0030】
次に、図2を用いて本発明の具体的な実施例を説明する。
図に示す動作練習支援装置(4)は、全体を制御するコンピュータ(40)と、学習者側に第1表示装置(41)、上記第1操作ハンドル(10)と同態様の第1操作部(42)、第1操作部(42)の動きを関知する動作センサ(43)と、第1操作部(42)に力を作用させるアクチュエータ(44)とを備えている。
【0031】
また、参考動作者側に第2表示装置(45)、上記第2操作ハンドル(20)と同態様の第2操作部(46)、第2操作部(46)の動きを関知する動作センサ(47)と、第2操作部(46)に力を作用させるアクチュエータ(48)とを備えている。
【0032】
以上の構成において、第1表示装置(41)、第2表示装置(46)には、それぞれ図3のような課題と、それぞれの動作状態を示す画面表示を行う。まず、コンピュータ(40)の課題等表示処理部(404)が、第1表示装置(41)と第2表示装置(46)とに同時に同じ課題を表示する。
課題は図3(a)のようにターゲットが円形の枠内で不規則な動きをするものである。
【0033】
学習者は第1操作部(42)を操作して画面上のカーソルを公知のパソコンのマウス様に移動させ、ターゲットの動きを追従するように練習する。そのために、第1操作部(42)の動きを動作センサ(43)が検出し、動作センサ情報取得部(401)がコンピュータ内(40)に取り込む。
【0034】
同様に、参考動作者が第2操作部(46)を操作して画面上のカーソルをマウス様に移動させ、ターゲットの動きを追従するようにする。本発明では参考動作者の動きは熟練者による手本でも良いし、学習者と同等か上下いずれかのレベルでもよい。第2操作部(46)の動きを動作センサ(47)が検出し、動作センサ情報取得部(401)がコンピュータ内(40)に取り込む。
【0035】
2つの動作センサ(43)(47)の動作を入力すると、弾性力算出部(402)が第1操作部(42)と第2操作部(46)の位置の偏差を計算し、その偏差に従った弾性力を算出する。弾性力は公知のように、偏差に弾性係数を乗じて計算される。本実施例では、弾性係数はコンピュータ(40)上で任意に設定でき、変化させることも可能である。
【0036】
算出された弾性力は、アクチュエータ駆動部(403)の作用により、2つのアクチュエータ(44)(48)を駆動し、第1操作部(42)に作用力、第2操作部(46)に反作用力を加える。
アクチュエータ駆動部(403)は、弾性体をシミュレーションするので、動作センサ情報取得部(401)でリアルタイムに第1操作部(42)と第2操作部(46)の位置を測定しながら、その瞬間の弾性力を伝える。
【0037】
学習者と参考動作者のいずれも、相手の操作と自己の操作との偏差を、弾性力を介した形で感じながら、ターゲットを追従する練習を行う。その際、課題等表示処理部(404)が自己のカーソルを表示するので、ターゲット位置との差異を視覚的にとらえながら練習することができる。
本発明は、上述したように学習者と参考動作者がこのような練習を繰り返すことで、徐々に上達し、例えば図3(b)にしめすようにターゲットの軌跡に近い軌道でカーソルを動かすことができるようになる。
【0038】
図4は、図2に示した動作練習支援装置(4’)の別実施例である。図2と同一の構成要素は同じ符号を付している。
別実施例では、参考動作者に替えて、参考動作者の動きを記録した参考動作情報記憶部(49)を備え、動作センサ情報取得部(401)の取得した第1操作部(42)の位置と該参考動作情報における位置との偏差から、弾性力算出部(402)が弾性力を計算する。
【0039】
参考動作情報は、実際に別の機会に参考動作者が行った動作を記録したものでもよいし、課題となるターゲットの動きと同一でもよい。
本構成によれば、学習者は単独で動作練習を行うことができる。
【0040】
また、他の実施例としては、図4のような動作練習支援装置(4’)を2基、ネットワークで互いに接続し、一方を学習者が、他方を参考動作者が操作して、動作センサ情報取得部(401)で取得した動作状態をネットワークを通して交換することにより、遠隔地間で2人が同時に動作練習することもできる。
【0041】
本発明は、2つの可動手段に限らず、さらに多数の可動手段を備えて、同時に多数の者による動作練習を行うこともできる。
すなわち、1つのコンピュータ(40)に第1操作部(42)と同様の多数の操作部を設けて一斉に動作練習を行い、例えば全員の動きの平均位置と、自己の位置との偏差に応じて弾性力を加える構成でもよい。同レベルであっても多数の者の平均をとることで、より正解に近い参考動作を基準にした動作練習を行うことができる。
【0042】
課題としては、練習する動作に応じて任意のものを用いることができる。本実施例では例えば、実際の操作部の位置と、表示装置におけるカーソルの位置との間で、回転変換をかけた上でターゲットを追従する課題も用いた。すなわち、実際に動かす手先方向に対して、ターゲットが例えば80度回転されて表示される。これはコンピュータのマウスを80度回転させて握ったのと同様の動きとなるため、容易にターゲットを追従することができない。このような練習課題とすることで、より高度な習熟度を獲得することができる。
【0043】
次に、本発明による動作練習支援方法を用いた場合の効果について実験例を示す。
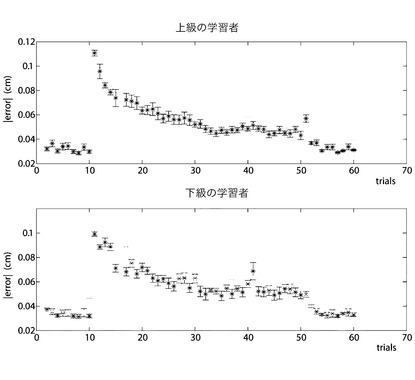
図5は上級の学習者と下級の学習者のエラーの変化を示すグラフである。本発明による弾性体で連結したときに、より上手に動かせるようになるかどうかを確認するために、1分ごとにランダムに弾性体による連結、解除を行った。
図5の青線のグラフが連結状態にある1分間のエラー(ターゲットとカーソルの間の平均距離)であり、緑線のグラフが連結を解除した状態の1分間のエラーである。初めの10分は上述した回転変換を行わない状態、次の40分が回転変換を行った状態、最後の10分が再び回転変換を行わない状態である。
【0044】
参考動作者が上級の学習者、学習者が下級の学習者とすれば、10組のペアの中で上級の学習者のエラーを示すグラフが上段、下級の学習者のエラーを示すグラフが下段である。
本グラフの結果から、回転変換を行った難易度の高い練習において、時間の経過により徐々に学習効果が現れてエラーが減っていくのはもちろん、ほぼコンスタントに青線(弾性体で連結した場合)が緑線(連結していない状態)よりもエラーが減少することが確認できる。
また、自分よりもレベルの低い相手(下級の学習者)と練習している上級の学習者でも、青線の方がエラーが少なく、練習の効果が高まることが確認できる。
【0045】
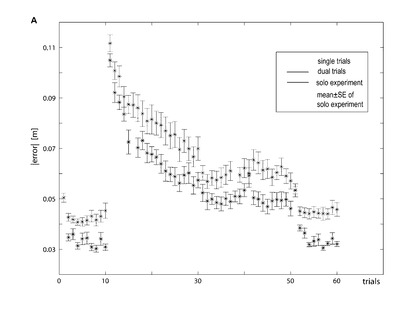
図6は、連結をまったく経験しない学習者と、連結を断続的にでも行った学習者との比較を示すグラフである。
赤線のグラフは、弾性体による連結を全く行わない学習者のエラーの推移であり、練習により徐々に低下する傾向は認められる一方、断続的な連結を行った緑線及び青線の学習者よりもエラーが多いことが分かる。緑線は連結状態を解除した際のエラーであるが、赤線よりはエラーが少ない傾向を示しており、断続的でも連結を行うことで学習効果が向上すると認められる。
【0046】
最後に、図7は参考動作者が学習者と比べてレベルが高い場合を横軸の正、低い場合を横軸の負とし、縦軸には単独の場合に比して二人で練習した場合に効果が高まる場合を正としたグラフを示している。
赤線は弾性係数が60N/mで4人が練習した場合と、180N/mで6人が練習した場合のグラフ、青線は弾性係数が120N/mで10人が練習した場合のグラフである。
【0047】
図から読み取れるように、参考動作者が自己よりも上手であるほど、連結した場合の効果が高まる。また、参考動作者が自己よりも下手であっても、正の値を取る傾向にあるため、下手な相手と練習した場合でも、効果が高まることが分かる。
同時に弾性係数が120N/mの方が60,180N/mのいずれの場合よりも効果が高まっている。従って、弾性係数が低すぎて参考動作者の動きがわかりにくい場合には練習効果が弱くなり、また高すぎて、剛体に近くなっても効果が弱くなることが分かる。
本実施例における実験結果では、概ね120N/mの弾性係数をもつ弾性体で連結することが好ましいことが判明した。
【符号の説明】
【0048】
1 学習者
2 参考動作者
3 弾性体
10 第1操作ハンドル
11 第1リンク機構
20 第2操作ハンドル
21 第2リンク機構
【技術分野】
【0001】
本発明は、学習者の動作練習を支援する動作練習支援装置及び動作練習支援方法に関し、特に動作練習時の参考となる動作を学習者に伝達して効率的な動作練習を実現する技術に係る。
【背景技術】
【0002】
スポーツの訓練やリハビリテーションの場面において、学習者の動作の上達を促進させる器具や方法が様々知られている。従来、スポーツ訓練においては熟練者の運動を追随させることで、また、リハビリテーションにおいては健常者の運動を追随することで、上達を促進させようという試みが行われている。
しかしながら、熟練者と共に練習を行うことは、熟練者の手間やコストがかかりすぎて実際上は難しいことや、学習者と熟練者のレベルの差が大きすぎる場合もある。そのため実用化はそれほど進んでいない。
【0003】
非特許文献1に記載の従来技術では、力覚のインタラクションがあるが、マスタースレーブシステムとなっており、マスター側はスレーブ側よりも高い能力を要求するスレーブ側の上達のみを目的としたシステムで、一人一人に指導者となる熟練者や健常者が必要となる。従って、システムとしての構成をとっているだけで、従来の人同士で行う方法に比して効率的になるものではない。
【0004】
非特許文献2に記載の従来技術では、同レベルの人の協力によって両者の成績が向上する方法が記載されている。しかし、本技術は意思決定に係る課題であって、運動機能を対象としたものではなく、スポーツ訓練や身体機能のリハビリのような運動の訓練効果向上につながる技術ではない。
【0005】
また、特許文献1に開示される技術は、多様な状況に適応するリハビリテーション装置等に関し、3つの動作自由度で相互作用する力を加えるのに適し、かつその体積内の任意の点において運動を抑制し得る駆動制御機構を備える。この駆動制御機構は対象の運動を制御するように構成されており、対象による運動を支援したり、対象による運動に抵抗したり、対象による運動を案内したり、対象が動くように押して促す、などの動作を行う。
本技術によれば、対象の運動を制御することができるが、看者にフィードバックと支援とを提供する、という点以外に、特別なフィードバック方法等を示したものではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許公開2009-231647号公報
【非特許文献】
【0007】
【非特許文献1】Duong,Teraoka,Imamura,Miyoshi,Terashima,MASTER-SLAVESYSTEM WITH TELEOPERATION FOR REHABILITATION,proceeding of IFAC 2005,03663.
【非特許文献2】Bahrami B,Olsen K,LathamPE,Roepstorff,Rees G,Frith CD,Optimally interacting minds.,Science.2010Aug.27;329(5995):1081-5
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は上記従来技術の有する問題点に鑑みて創出されたものであり、学習者の動作練習の効果を高めると共に、熟練者に必ずしも頼らなくても練習が可能な動作練習支援装置及び動作練習支援方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、学習者の動作練習を支援する動作練習支援装置であって、学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段とを備える。
本参考動作伝達手段には、上記参考動作と上記学習者動作とに偏差が生じた時に、所定の弾性係数によって偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段とを備える。
以上の構成において、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝える。
【0010】
上記の動作練習支援装置において、第1可動手段と略同一の可動部分を備えて参考動作に合わせて可動する第2可動手段を備え、参考動作を行う参考動作者の実際の動作を参考動作伝達手段に伝えるようにしてもよい。
【0011】
上記の参考動作が、同じ動作練習を行う参考動作者による動作であって、参考動作伝達手段において、参考動作弾性力発生手段で発生する弾性力の反作用力を、第2可動手段に付勢する学習者動作付勢手段を備えてもよい。本構成は第1可動手段と第2可動手段とを略同態様とするものであり、参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝えて参考動作者の動作練習も支援可能である。
【0012】
上記の動作練習支援装置において、学習者の動作練習の際に、学習者が追随した動作を行うための課題を生成する課題生成手段と、コンピュータの表示画面で課題を表示する課題表示手段と、第1可動手段に接続され、学習者動作の状態を取得する学習者動作取得手段と、コンピュータの表示画面で取得された学習者動作の状態を該課題と共に表示する学習者動作表示手段とを備える構成でもよい。
【0013】
本発明は次のような学習者の動作練習を支援する動作練習支援方法を提供することもできる。
すなわち、学習者が練習する際の学習者動作と、学習者が練習する際に参考となる参考動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させ、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝える。
【0014】
また、上記の参考動作が、同じ動作練習を行う参考動作者による動作であって、上記弾性力の反作用力を、参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝え、参考動作者の動作練習も支援するようにしてもよい。
【発明の効果】
【0015】
本発明は、以上の構成を備えることにより、次のような効果を奏する。
すなわち、熟練者や健常者等が行う参考動作と、学習者の行う学習者動作との偏差に応じて弾性力を発生させ、それを学習者に伝達することにより学習者の練習効果を向上せしめることができる。
また、弾性力はバネやゴム等によっても容易に実施可能であり、装置の簡便な構成及び低コストアップの要因を排除することができる。
【0016】
また、参考動作を、学習者と同様に動作練習を行う参考動作者による動作にしてもよいので、2人以上が同時に練習することもできる。本発明の構成によれば、参考動作が熟練者でなく、同レベルの者によって行われた場合でも、学習者、参考動作者の双方に練習効果があることが示された。そのため、従来のように熟練者が学習に立ち会う必要はなく、同レベルの学習者が自由に動作練習することができる。
また熟練者の動作のシミュレーションのために学習者の動作を計測する必要もなく、装置のコストアップを招くことがない。
【0017】
本発明の動作練習支援装置に、課題表示手段と学習者動作取得手段、学習者動作表示手段を備えることにより、学習者に対して課題の提示と、自己の動作の結果を視覚的に伝えることができる。本発明の参考動作のフィードバックと合わせて、学習者の練習効果の向上を図ることができる。
【図面の簡単な説明】
【0018】
【図1】本発明の原理を説明する説明図である。
【図2】本発明に係る動作練習支援装置の構成図である。
【図3】課題及び動作状態の表示画面の一例である。
【図4】本発明に係る動作練習支援装置(別実施例)の構成図である。
【図5】レベルの異なる二人の学習者による練習効果を示すグラフである。
【図6】参考動作伝達手段の有無による練習効果の差異を示すグラフである。
【図7】学習者間のレベルの差と練習効果、弾性係数の相関を示すグラフである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を、図面に示す実施例を基に説明する。なお、実施形態は下記に限定されるものではない。
図1を用いて、本発明の原理を説明する。図中で左側は学習者(1)、右側には参考動作者(2)を示す。学習者は第1可動手段である第1操作ハンドル(10)を握り、参考動作者は第2可動手段である第2操作ハンドル(20)を握り、それぞれ操作する。
各操作ハンドル(10)(20)は、それぞれ2次元平面上で前後左右に自在に動作可能な第1リンク機構(11)と第2リンク機構(21)で支持される。
【0020】
本発明において、第1操作ハンドル(10)と第2操作ハンドル(20)が各々基準位置にあるときの偏差を0として、基準位置からの相対的位置が異なった場合の位置の偏差に従って、少なくとも学習者が動作させている第1操作ハンドル(10)に対して、弾性力を及ぼすようにする。
すなわち、参考動作と学習者動作とに偏差が生じた時に、その偏差に応じた弾性力を発生させる参考動作弾性力発生手段(具体的には図示せず)と、その弾性力を第1操作ハンドル(10)に伝達する参考動作付勢手段(具体的には図示せず)とを備える。
【0021】
参考動作弾性力発生手段と参考動作付勢手段との最も簡便な実施方法は、バネ又はゴムなどの弾性体を用いる方法である。本実施例の構成においては、第1操作ハンドル(10)・第2操作ハンドル(20)間に弾性体(3)を配設することができる。弾性体(3)は、両操作ハンドル(10)(20)が基準位置にあるときに自然長とすれば、偏差が生じた時に、弾性体の弾性係数に従って弾性力を生じさせ、弾性体(3)の端点を接続した第1操作ハンドル(10)に作用する。
【0022】
また、上記のように第1操作ハンドル(10)や第2操作ハンドル(20)を用いることなく、腕などの身体部位に直接バネ又はゴムなどの弾性体の端点を装着して弾性力を直接身体に作用させるようにしてもよい。
【0023】
本構成によると、学習者(1)から見た時、自己の動作が参考動作者の動作と完全に一致している場合には参考動作者からの影響を受けない一方、参考動作者との偏差が大きくなるとより強く、その偏差のベクトルと平行で偏差を小さくする向きに力を受ける。このため、学習者は、参考動作と自己の動作とが相異していることを認識できる。
なお、本発明の実施においては上記と逆向き、すなわち偏差のベクトルと平行で偏差を大きくする向きに学習者が力を受ける構成でもよい。この場合でも、学習者は、参考動作と自己の動作とが相異していることを認識でき、学習者が偏差を補正しようとする過程で学習者に対するフィードバック効果を有するものと考えられる。
【0024】
スポーツ訓練やリハビリといった、動作の練習を行う際に、熟練者の動作を真似て練習することが効果的であることは言うまでもなく、適当なリンク機構を用いて熟練者が学習者の動作を補助しながら練習することは行われている。
しかしながら、このような従来の方法では熟練者の動作が正確であることが前提であり、低い習熟レベルの学習者同士で練習しても効果は得られなかった。
【0025】
これに対して本発明は、弾性体(3)を介在させることで学習者に対する参考動作のフィードバックを変化させ、従来技術とは異なる効果があることを見出したものである。効果を示す実験結果については後述する。
【0026】
上記に示したように、第1操作ハンドル(10)と第2操作ハンドル(20)を弾性体(3)で接続した場合、学習者側の第1操作ハンドル(10)に弾性力が作用すると同時に、参考動作者側の第2操作ハンドル(20)にその反作用力が作用する。
さらに本発明では、このような構成において、学習者のみならず参考動作者の動作練習にも寄与することを見出した。すなわち、参考動作者(2)として、熟練者に限らず学習者と同様に動作練習を行う者が担当し、両者が共に動作練習を行うことを可能にした。
そのため、熟練者を必ずしも要さず、2人以上の学習者によって動作練習を行うことができる。
【0027】
なお、本発明の実施において参考動作に係る態様は上記に限定されない。
例えば、実在する参考動作者による動作ではなく、予め参考動作者の動作を記録し、その通りに第2可動手段を動かす構成でもよい。参考動作者の動作は、コンピュータ等のプログラムで生成した理想的な動作、あるいはそれに所定の変化を加えた人工的な動作でもよい。
【0028】
第2可動手段を備えない構成でもよい。すなわち、一人の学習者を対象とした装置では、第1可動手段だけを備えて、コンピュータ上で生成した参考動作の位置と、第1可動手段の位置との偏差に従って弾性力を計算し、アクチュエータなどで構成される参考動作弾性力発生手段が弾性力に相当する力を発生し、参考動作付勢手段が第1可動手段に作用する。
この場合でも、本発明の最も重要な点である弾性力を利用した学習者へのフィードバックが実現される。
【0029】
本発明が対象とする動作練習は、図1のように手を用いた平面動作に限らず、任意の動作練習に適用することができる。例えば、スポーツ訓練であれば、テニス、野球、卓球などにおける手腕の3次元運動、サッカー、スキー、スケート、ジョギングなどの足の3次元運動を対象としてもよい。楽器の演奏、書道等の所作の練習に用いてもよい。また、リハビリを目的として、公知の様々な動作練習に用いても良い。
【0030】
次に、図2を用いて本発明の具体的な実施例を説明する。
図に示す動作練習支援装置(4)は、全体を制御するコンピュータ(40)と、学習者側に第1表示装置(41)、上記第1操作ハンドル(10)と同態様の第1操作部(42)、第1操作部(42)の動きを関知する動作センサ(43)と、第1操作部(42)に力を作用させるアクチュエータ(44)とを備えている。
【0031】
また、参考動作者側に第2表示装置(45)、上記第2操作ハンドル(20)と同態様の第2操作部(46)、第2操作部(46)の動きを関知する動作センサ(47)と、第2操作部(46)に力を作用させるアクチュエータ(48)とを備えている。
【0032】
以上の構成において、第1表示装置(41)、第2表示装置(46)には、それぞれ図3のような課題と、それぞれの動作状態を示す画面表示を行う。まず、コンピュータ(40)の課題等表示処理部(404)が、第1表示装置(41)と第2表示装置(46)とに同時に同じ課題を表示する。
課題は図3(a)のようにターゲットが円形の枠内で不規則な動きをするものである。
【0033】
学習者は第1操作部(42)を操作して画面上のカーソルを公知のパソコンのマウス様に移動させ、ターゲットの動きを追従するように練習する。そのために、第1操作部(42)の動きを動作センサ(43)が検出し、動作センサ情報取得部(401)がコンピュータ内(40)に取り込む。
【0034】
同様に、参考動作者が第2操作部(46)を操作して画面上のカーソルをマウス様に移動させ、ターゲットの動きを追従するようにする。本発明では参考動作者の動きは熟練者による手本でも良いし、学習者と同等か上下いずれかのレベルでもよい。第2操作部(46)の動きを動作センサ(47)が検出し、動作センサ情報取得部(401)がコンピュータ内(40)に取り込む。
【0035】
2つの動作センサ(43)(47)の動作を入力すると、弾性力算出部(402)が第1操作部(42)と第2操作部(46)の位置の偏差を計算し、その偏差に従った弾性力を算出する。弾性力は公知のように、偏差に弾性係数を乗じて計算される。本実施例では、弾性係数はコンピュータ(40)上で任意に設定でき、変化させることも可能である。
【0036】
算出された弾性力は、アクチュエータ駆動部(403)の作用により、2つのアクチュエータ(44)(48)を駆動し、第1操作部(42)に作用力、第2操作部(46)に反作用力を加える。
アクチュエータ駆動部(403)は、弾性体をシミュレーションするので、動作センサ情報取得部(401)でリアルタイムに第1操作部(42)と第2操作部(46)の位置を測定しながら、その瞬間の弾性力を伝える。
【0037】
学習者と参考動作者のいずれも、相手の操作と自己の操作との偏差を、弾性力を介した形で感じながら、ターゲットを追従する練習を行う。その際、課題等表示処理部(404)が自己のカーソルを表示するので、ターゲット位置との差異を視覚的にとらえながら練習することができる。
本発明は、上述したように学習者と参考動作者がこのような練習を繰り返すことで、徐々に上達し、例えば図3(b)にしめすようにターゲットの軌跡に近い軌道でカーソルを動かすことができるようになる。
【0038】
図4は、図2に示した動作練習支援装置(4’)の別実施例である。図2と同一の構成要素は同じ符号を付している。
別実施例では、参考動作者に替えて、参考動作者の動きを記録した参考動作情報記憶部(49)を備え、動作センサ情報取得部(401)の取得した第1操作部(42)の位置と該参考動作情報における位置との偏差から、弾性力算出部(402)が弾性力を計算する。
【0039】
参考動作情報は、実際に別の機会に参考動作者が行った動作を記録したものでもよいし、課題となるターゲットの動きと同一でもよい。
本構成によれば、学習者は単独で動作練習を行うことができる。
【0040】
また、他の実施例としては、図4のような動作練習支援装置(4’)を2基、ネットワークで互いに接続し、一方を学習者が、他方を参考動作者が操作して、動作センサ情報取得部(401)で取得した動作状態をネットワークを通して交換することにより、遠隔地間で2人が同時に動作練習することもできる。
【0041】
本発明は、2つの可動手段に限らず、さらに多数の可動手段を備えて、同時に多数の者による動作練習を行うこともできる。
すなわち、1つのコンピュータ(40)に第1操作部(42)と同様の多数の操作部を設けて一斉に動作練習を行い、例えば全員の動きの平均位置と、自己の位置との偏差に応じて弾性力を加える構成でもよい。同レベルであっても多数の者の平均をとることで、より正解に近い参考動作を基準にした動作練習を行うことができる。
【0042】
課題としては、練習する動作に応じて任意のものを用いることができる。本実施例では例えば、実際の操作部の位置と、表示装置におけるカーソルの位置との間で、回転変換をかけた上でターゲットを追従する課題も用いた。すなわち、実際に動かす手先方向に対して、ターゲットが例えば80度回転されて表示される。これはコンピュータのマウスを80度回転させて握ったのと同様の動きとなるため、容易にターゲットを追従することができない。このような練習課題とすることで、より高度な習熟度を獲得することができる。
【0043】
次に、本発明による動作練習支援方法を用いた場合の効果について実験例を示す。
図5は上級の学習者と下級の学習者のエラーの変化を示すグラフである。本発明による弾性体で連結したときに、より上手に動かせるようになるかどうかを確認するために、1分ごとにランダムに弾性体による連結、解除を行った。
図5の青線のグラフが連結状態にある1分間のエラー(ターゲットとカーソルの間の平均距離)であり、緑線のグラフが連結を解除した状態の1分間のエラーである。初めの10分は上述した回転変換を行わない状態、次の40分が回転変換を行った状態、最後の10分が再び回転変換を行わない状態である。
【0044】
参考動作者が上級の学習者、学習者が下級の学習者とすれば、10組のペアの中で上級の学習者のエラーを示すグラフが上段、下級の学習者のエラーを示すグラフが下段である。
本グラフの結果から、回転変換を行った難易度の高い練習において、時間の経過により徐々に学習効果が現れてエラーが減っていくのはもちろん、ほぼコンスタントに青線(弾性体で連結した場合)が緑線(連結していない状態)よりもエラーが減少することが確認できる。
また、自分よりもレベルの低い相手(下級の学習者)と練習している上級の学習者でも、青線の方がエラーが少なく、練習の効果が高まることが確認できる。
【0045】
図6は、連結をまったく経験しない学習者と、連結を断続的にでも行った学習者との比較を示すグラフである。
赤線のグラフは、弾性体による連結を全く行わない学習者のエラーの推移であり、練習により徐々に低下する傾向は認められる一方、断続的な連結を行った緑線及び青線の学習者よりもエラーが多いことが分かる。緑線は連結状態を解除した際のエラーであるが、赤線よりはエラーが少ない傾向を示しており、断続的でも連結を行うことで学習効果が向上すると認められる。
【0046】
最後に、図7は参考動作者が学習者と比べてレベルが高い場合を横軸の正、低い場合を横軸の負とし、縦軸には単独の場合に比して二人で練習した場合に効果が高まる場合を正としたグラフを示している。
赤線は弾性係数が60N/mで4人が練習した場合と、180N/mで6人が練習した場合のグラフ、青線は弾性係数が120N/mで10人が練習した場合のグラフである。
【0047】
図から読み取れるように、参考動作者が自己よりも上手であるほど、連結した場合の効果が高まる。また、参考動作者が自己よりも下手であっても、正の値を取る傾向にあるため、下手な相手と練習した場合でも、効果が高まることが分かる。
同時に弾性係数が120N/mの方が60,180N/mのいずれの場合よりも効果が高まっている。従って、弾性係数が低すぎて参考動作者の動きがわかりにくい場合には練習効果が弱くなり、また高すぎて、剛体に近くなっても効果が弱くなることが分かる。
本実施例における実験結果では、概ね120N/mの弾性係数をもつ弾性体で連結することが好ましいことが判明した。
【符号の説明】
【0048】
1 学習者
2 参考動作者
3 弾性体
10 第1操作ハンドル
11 第1リンク機構
20 第2操作ハンドル
21 第2リンク機構
【特許請求の範囲】
【請求項1】
学習者の動作練習を支援する動作練習支援装置であって、
学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、
学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段と
を備えた構成において、
該参考動作伝達手段には、
該参考動作と該学習者動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、
該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段と
を備え、
学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにした
ことを特徴とする動作練習支援装置。
【請求項2】
前記動作練習支援装置において、
前記第1可動手段と略同一の可動部分を備えて前記参考動作に合わせて可動する第2可動手段を備え、
参考動作を行う参考動作者の実際の動作を参考動作伝達手段に伝えるようにした
請求項1に記載の動作練習支援装置。
【請求項3】
前記参考動作が、同じ動作練習を行う参考動作者による動作であって、
前記参考動作伝達手段において、
前記参考動作弾性力発生手段で発生する弾性力の反作用力を、前記第2可動手段に付勢する学習者動作付勢手段を備え、
参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝えて参考動作者の動作練習も支援可能である
請求項2に記載の動作練習支援装置。
【請求項4】
前記動作練習支援装置において、
前記学習者の動作練習の際に、学習者が追随した動作を行うための課題を生成する課題生成手段と、
コンピュータの表示画面で課題を表示する課題表示手段と、
前記第1可動手段に接続され、学習者動作の状態を取得する学習者動作取得手段と、
コンピュータの表示画面で取得された学習者動作の状態を該課題と共に表示する学習者動作表示手段と
を備える請求項1ないし3のいずれかに記載の動作練習支援装置。
【請求項5】
学習者の動作練習を支援する動作練習支援方法であって、
学習者が練習する際の学習者動作と、学習者が練習する際に参考となる参考動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させ、
学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにした
ことを特徴とする動作練習支援方法。
【請求項6】
前記参考動作が、同じ動作練習を行う参考動作者による動作であって、
前記弾性力の反作用力を、
参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝え、参考動作者の動作練習も支援する
請求項5に記載の動作練習支援方法。
【請求項1】
学習者の動作練習を支援する動作練習支援装置であって、
学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、
学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段と
を備えた構成において、
該参考動作伝達手段には、
該参考動作と該学習者動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、
該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段と
を備え、
学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにした
ことを特徴とする動作練習支援装置。
【請求項2】
前記動作練習支援装置において、
前記第1可動手段と略同一の可動部分を備えて前記参考動作に合わせて可動する第2可動手段を備え、
参考動作を行う参考動作者の実際の動作を参考動作伝達手段に伝えるようにした
請求項1に記載の動作練習支援装置。
【請求項3】
前記参考動作が、同じ動作練習を行う参考動作者による動作であって、
前記参考動作伝達手段において、
前記参考動作弾性力発生手段で発生する弾性力の反作用力を、前記第2可動手段に付勢する学習者動作付勢手段を備え、
参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝えて参考動作者の動作練習も支援可能である
請求項2に記載の動作練習支援装置。
【請求項4】
前記動作練習支援装置において、
前記学習者の動作練習の際に、学習者が追随した動作を行うための課題を生成する課題生成手段と、
コンピュータの表示画面で課題を表示する課題表示手段と、
前記第1可動手段に接続され、学習者動作の状態を取得する学習者動作取得手段と、
コンピュータの表示画面で取得された学習者動作の状態を該課題と共に表示する学習者動作表示手段と
を備える請求項1ないし3のいずれかに記載の動作練習支援装置。
【請求項5】
学習者の動作練習を支援する動作練習支援方法であって、
学習者が練習する際の学習者動作と、学習者が練習する際に参考となる参考動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させ、
学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにした
ことを特徴とする動作練習支援方法。
【請求項6】
前記参考動作が、同じ動作練習を行う参考動作者による動作であって、
前記弾性力の反作用力を、
参考動作者に対して、学習者動作と自己の動作との偏差を弾性力として伝え、参考動作者の動作練習も支援する
請求項5に記載の動作練習支援方法。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−165834(P2012−165834A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−27711(P2011−27711)
【出願日】平成23年2月10日(2011.2.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、文部科学省、科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月10日(2011.2.10)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、文部科学省、科学技術試験研究委託事業「日本の特長を活かしたBMIの統合的研究開発」に係る委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
[ Back to top ]