
動力伝達系のねじり振動解析方法、解析装置、解析プログラム、およびエンジン被駆動装置間の軸系装置
【課題】シリンダ部の絶対減衰係数、シリンダ間の相対減衰係数を、エンジン実機に則した値を算出して、動力伝達系のねじり振動解析に反映させる動力伝達系のねじり振動解析方法、解析装置、解析プログラム、およびエンジン被駆動装置間の軸系装置を提供する。
【解決手段】エンジンから被駆動装置までを慣性質量・バネ系にモデル化し、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関絶対減衰係数および機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成して、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める。
【解決手段】エンジンから被駆動装置までを慣性質量・バネ系にモデル化し、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関絶対減衰係数および機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成して、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンにより駆動される舶用推進装置、発電機装置、車輌駆動装置等の軸系動力伝達装置に関し、特に、動力伝達系のねじり振動解析方法、解析装置、解析プログラム、およびエンジン被駆動装置間の軸系装置に関する。
【背景技術】
【0002】
エンジンにより駆動される舶用推進装置、発電機装置、車輌駆動装置等の軸系動力伝達装置における設計技術は、地球環境保護、省エネルギーの観点から益々重要となってきている。
当該観点より、エンジンの高度化開発においては、性能と構造強度が鬩ぎ合い、強度余裕(安全率)のより正確な把握が技術課題として浮上してくる。特に、舶用推進主機の軸系のような場合、過大な余裕は高性能化を阻害し、余裕の不足や不正確な予測評価は海難事故(漂流)の原因ともなりかねない。当該エンジン軸系の応力・強度の正確な評価計算上に不可欠な軸系減衰データの捉え方は、今尚確立されていない。
【0003】
ねじり振動計算の手順として次のようなものが知られている。
(1)慣性質量-バネ系へのモデル化。
(2)同上モデルの固有(節)モード・固有振動数の算定。
(3)各固有モード・各固有振動数におけるエンジン軸系ねじり起振トルク(エネルギー)の計算。
(4)各固有モード・各固有振動数における軸系減衰エネルギー(プロペラ減衰、発電機減衰、被駆動装置減衰、継手・ダンパー減衰、軸受減衰、クランク軸ヒステリシス減衰、エンジン減衰等)の評価・計算。
(5)共振時の起振エネルギーと減衰エネルギーの平衡条件仮定に基づき、各固有モード・各固有振動数における慣性質量各部のねじれ振幅角の算定並びに各軸部の応力算定。
(6)実機試運転時のねじれ振動計測による安全性の確認。
【0004】
上記のモデル化や固有値解析((1)、(2))の精度は高く、一般に計測結果との対応は良い。軸系装置や構造物の固有値解析は、離散化モデルの要素数の多寡に依らず、比較的精度が期待できることによる。
また、エンジン側よりの起振エネルギーの評価(3)も適正なトルクハーモニックス入力とベクトルサム計算を以って、精度は概して期待できる。
【0005】
一方、減衰エネルギーの計算(4)において、プロペラ減衰に関しては、旧来、多くの研究(例えば非特許文献1)があり、又、発電機、軸継手・ダンパー、被駆動装置の減衰に関しては、それぞれメーカから入手可能である。
しかしながら、エンジン内部の軸受減衰(機関減衰を含むものとする。又、各慣性質量部のふれ角絶対値依存であり絶対減衰とカテゴライズする)や軸ヒステリス減衰(隣合う慣性質量部間のバネ即ち軸部の相対ねじれ角依存の減衰であり相対減衰とカテゴライズする)については多くの研究がなされているにも拘らず、未だに不明確なところが大きい。
【0006】
流体弾性潤滑解析手法は進歩してきてはいるものの、解析モデルと実際との溝を埋めるに至ってはいない。また、材料ヒステリシス散逸エネルギー計算を適用するには(試みられてはいるが)、クランク軸形状はあまりにも複雑である。
従って、当該絶対減衰並びに相対減衰の捉え方は実績・経験に基づく、試行錯誤的なものとならざるを得ず、同一エンジン類似軸系以外への応用は一般に困難なものとなる。また、エンジン回転全領域での共振点における各振幅の計算・計測の一致を見ることも極めて困難である。
【0007】
従来のプラクティスでは当該の絶対減衰・相対減衰を低めに見積もり計算上の振幅・応力を高め(安全側)に導く傾向があった。従って、限界設計の視点を持込むこともできず、新規の設計や新たな解析では、過剰な余裕率を余儀なくされていた。
なお、捩り振動の減衰係数関連の特許文献については見られず、一般的な技術参考文献として非特許文献2が知られている。なお一方、数理用語に関しては、非特許文献3があり、必要に応じて参照している。
【0008】
【非特許文献1】W. Ker Wilson: Practical Solutionof Torsional Vibration Problems, 1956
【非特許文献2】舶用主機関のねじり振動、赤堀、山海堂、1963
【非特許文献3】数学辞典、岩波書店、第4版、2007
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、かかる従来技術の問題点に鑑み、上述のエンジンの絶対減衰並びに相対減衰エネルギーの算出精度をエンジン実機に合うように(実機の運転結果とより良く整合するように)向上させることを課題とする。
【0010】
被駆動装置が機関直結のプロペラの場合のエンジン・軸系のモデル例が図1に与えられている。同図においてcyl.1からcyl.mの部分は各シリンダに、また、n番目の節点にプロペラが置かれている。その他の節点の慣性質量は当該節点近傍の軸部、ギア列部分、はずみ車、継手・ダンパー部等をモデル化したものとなる。当然のことながら、図1のプロペラは被駆動装置一般に置き換えてもよい。
【0011】
図1において、cyl.1からcyl.mの部分(節点2からm+1の部分)には前述の絶対減衰が作用している。節点nのプロペラ部分にも絶対減衰が作用している。一方、隣接するシリンダ間には相対的なねじれに伴う相対減衰が作用している。
従って、具体的な課題はシリンダ(クランクスロー)部の絶対減衰エネルギーもしくは絶対減衰係数、並びにシリンダ(クランクスロー)間の相対減衰エネルギーもしくは相対減衰係数を、エンジン実機に則した値として算出して動力伝達系のねじり振動解析に反映させることである。
【課題を解決するための手段】
【0012】
上記課題解決のため、第1の発明は、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法であって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化し起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成し、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする。
【0013】
本発明では複数の共振持続状態点におけるエネルギーバランスの式である次式を基礎とする。

【0014】
(j=1〜m) の分布と着火間隔・着火順序とによってもとまるベクトルサム、ω は当該の固有モード・固有振動数における角振動数、Ciは各慣性質量部への減衰係数、θL は基準位置(通常前方自由端)の振れ角、βi
はi番目の慣性質量部の無次元ねじれ角(モード比)である。
【0015】
ここで、Akはk次における高調波次数のトルク、Cabsはエンジン各シリンダ(各クランクスロー)部の絶対ふれ角に作用する絶対減衰係数、Crelはエンジン各シリンダ(各クランクスロー)部間の相対ふれ角に作用する相対減衰係数であり、Cprは被駆動装置(プロペラ)部の絶対ふれ角に作用する絶対減衰係数である。
【0016】
一方、式(1)の左辺の起振エネルギーは当該共振モード・共振次数(k次)における高調波次数のトルク Akと共振モードのβj(j=1〜m)の分布と着火間隔・着火順序とによってもとまるベクトルサムをθL 倍した値すなわち
【0017】
とかくことができる。即ち、式(1)、(3)および(2)より
まることになる。
【0018】
一方、次式(5)で定義される ζ はエンジン減衰比と呼ばれる。
【0019】
とができる。実測より、複数個の共振点(角振動数ω)においてエンジン減衰比ζは半値
ができる。
勿論、式(3)に則して起振エネルギーより求めてもよい。
【0020】
以上より、慣性質量部の無次元ねじれ角(モード比)βi,等価慣性モーメント(モー
比ζは実測より求めることができる。
【0021】
の減衰係数Cprは装置供給者側からのデータ入手が可能(もしくは論文により公知)であるから、着目する共振点の個数に応じた個数の方程式(2)を得る。
【0022】
ここで、方程式(2)は、上述のように絶対減衰係数Cabs および相対減衰係数Crelに関する方程式になっている。両者を角振動数に依存しない定数と簡潔に考えるときは、適正な二つの共振点の実測より方程式(2)を二つ連立させ解くこともできる。
【0023】
なお、好ましくは、ねじりI節固有振動モードから前記総減衰エネルギーを算出し、既知の被駆動装置・軸系上の付属物の減衰エネルギーと、前記ねじりI節固有振動モードにおける相対減衰エネルギーが無視可能であることに基づいて、前記機関絶対減衰係数を求めるとよく、さらに、ねじりII節固有振動モードから前記総減衰エネルギーを算出し、該総減衰エネルギーより前記機関絶対減衰係数および前記既知の被駆動装置・軸系上の付属物の減衰エネルギーを減算して機関相対減衰係数を求めるとよい。
【0024】
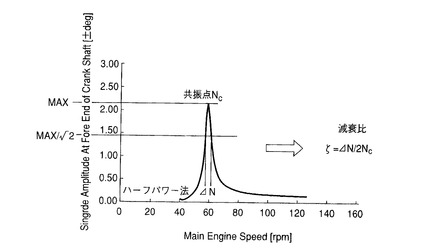
例えば、舶用推進軸系でプロペラ・エンジン直結の場合、最も単純明快な手法は実測共振点の一つをI節固有振動モードから選択すれば(図3参照)、相対減衰の項は無視可能ともなり、方程式(3)は絶対減衰係数Cabs のみの1次方程式となりCabs は直ぐにもとまる。
さらに、II節モードより実測共振点の一つを選べばプロペラの振幅βnは略零となるため、プロペラ減衰を無視できて(図3参照)、直近で得られたCabs を用いて、II節モード共振に関する方程式(2)をCrelに関して解くこともできる。
【0025】
本発明の意図するところは、CabsおよびCrelについて解くために二つの方程式(2)を選びそれを解くことに限定されるわけではない。今、CabsおよびCrelをそれぞれ未知数AおよびBとすることにする。方程式の数は3個以上あっても問題はない。
【0026】
方程式の数が3個以上あっても、複数の連立方程式を最小二乗法により、または、連立方程式を一般逆行列解法により、当該機関絶対減衰係数および当該機関相対減衰係数を求めることができる。
例えば、最小二乗法の手法を適用できることを示す。
3個の共振点より定数AおよびBに関する3個の連立方程式
a1A+b1B=c1
a2A+b2B=c2 (6)
a3A+b3B=c3
を得たとする。
【0027】
ここで誤差関数 f を例えば、
f= (a1A+b1B−c1)2+(a2A+b2B−c2)2+(a3A+b3B−c3)2 (7)
のように置けば、fはA、Bに関する正値二次形式であり、fのAによる偏微分を取り0と置くこととfのBによる偏微分を取り0と置くこととにより、AおよびBに関する2元連立1次方程式に帰着可能となるから、最小二乗近似の意味においてAおよびBについて解くことができる。
【0028】
また、上記3個の連立方程式を一般逆行列の手法を用いて解くこともできる。式(6)および(7)を用いるこの手法は、二つの未知数AおよびBに関しての丁度二つの方程式を解く手法を包含する、より一般的な手法となっている。
さらに後述のように、AおよびBは角振動数ωに依存するωの多項式関数あるいはω依存の特殊内挿関数と考え、それらの展開係数を求める最小二乗法によって求めることも可能である。
【0029】
上記の最小二乗法あるいは一般逆行列解法は、単に連立方程式を解くと言う意味を超えて、最適問題解法或いは最適計画ツールとして認識することもできるし、特に後者は、非正方行列の特異値分解(一種のスペクトル分解)に応用される。つまり、未知数の個数に対して、方程式系の個数に過不足があっても、物理的、統計学的、幾何学的あるいは情報科学的等の観点から意味のある答えを提示するツールであり、連立方程式解法の如何なる解法も、これら両手法との関連を否定できないとも考えられる。つまり、おおかたの解法はそれぞれ個性はあっても、これら両方法の流れの中で見て均等手法と見なせると言える。
【0030】
一方、連立方程式或いは一変数の方程式の解法として、原始的な試行錯誤法(トライアンドエラー法)というものも存在する。つまり、最も原始的な取組み方は、未知数乃至は未知数ベクトルをランダム(乱数発生手段による)に振って、方程式系の右辺と左辺の差が0(あるいは比が1)となるものを見つける手法である。これは、一種のモンテカルロ法とも位置付けされよう。未知数乃至は未知数ベクトルの振り方に直交表(直交配列とよばれたりもする)を用いれば実験計画法の名が冠せられる。パラメータの振り方に何らか規則があれば(乱数発生も一つの規則である)、原始的な試行錯誤法(トライアンドエラー法)であっても、統計的アプローチ、代数的アプローチから無縁ではあり得ない。この意味で、どんな試行錯誤法(トライアンドエラー法)でも上記最小二乗法あるいは一般逆行列解法の俎上若しくは延長線上に乗っても不思議ではない。
【0031】
しかしながら、本発明では、上記の実験計画法における直交表を用いる試行錯誤法(トライアンドエラー法)についても言及する。これは、所謂実験計画法自体、有用とされるものの、理論と呼ぶには、流動的で且つつかみ所のない側面があるためである(本発明の一様態として明確化しておく)。即ち、前記方程式系の一様態としての未知数個数過剰の連立方程式系(式(6)等)の解法として、実験計画手法の直交表を適用して、未知数パラメータ水準選定下において、該未知数パラメータの組合せを該直交表に割付け、割付けられた該未知数パラメータの組合せの各々毎に、該連立方程式に包含される制御因子や誤差因子や分散を含むパラメータ、又それらの組合せ関数を採りあげて感度解析法を実行するとともに未知数決定方法に従って、機関絶対減衰係数および機関相対減衰係数を決定することを特徴とする。
【0032】
本発明は、エンジン内の減衰を絶対減衰(絶対減衰係数Cabs)および相対減衰(相対減衰係数Crel)に分離し、当該の二種類の減衰係数を評価する上で、複数個の共振点実測データを有効に使用するものである。
本発明によれば、実機に即した絶対減衰(絶対減衰係数)および相対減衰(相対減衰係数)が算出可能となるため、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、エンジンの運転過渡軌跡に関してのねじれ振動応答の把握も高精度で可能となる。
【0033】
次に、第2の発明は、前記第1の方法発明を実施するため装置発明に関し、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析装置であって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段と、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段と、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段と、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段と、を備えたことを特徴とする。
【0034】
かかる装置発明によれば、前記方法発明で説明した作用と同様に、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になる。
【0035】
さらに、第3の発明は、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段を有することを特徴とする。
【0036】
かかるプログラム発明によれば、前記方法発明および装置発明で説明した作用と同様に、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、本発明はコンピュータによる計算が必須であるため、かかるプログラムの発明によって、エンジン被駆動装置間の軸系装置の有用な設計手法となる。
【0037】
また、第4の発明は、前記方法発明によって解析された機関絶対減衰係数および機関相対減衰係数に基づいて設計されたエンジンと被駆動装置とを連結する動力伝達系を備えたことを特徴とし、具体的には、舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されるエンジン被駆動装置間の軸系装置を提供する。
かかる発明によれば、実機に即した絶対減衰(絶対減衰係数)および相対減衰(相対減衰係数)に基づいて動力伝達系の設計ができるため、信頼性、安全性の高い舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されるエンジン被駆動装置間の軸系装置を提供できる。
【発明の効果】
【0038】
本発明によれば、エンジンの絶対減衰並びに相対減衰エネルギーの見積もり精度をエンジンの実際に則して(実機の運転結果とより良く整合するように)向上させることができる。
したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。
また、エンジン軸系のねじり振動を正確に把握できるようになることは、取りも直さず、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることにもなる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与することが可能となる。
さらに、本発明によれば、余裕度(安全率)を正確に仕様に反映することができるため、軸系トラブル解析にも有効な手立てともなる。
また、本発明により設計製作されたエンジンと被駆動装置を連結する動力伝達軸系は、精度良い減衰係数に基づいて設計されるため、安全性、信頼性が向上する。
【発明を実施するための最良の形態】
【0039】
以下に本発明について図面を参照して説明する。但しこの実施の形態として記載されている部品の構成、寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0040】
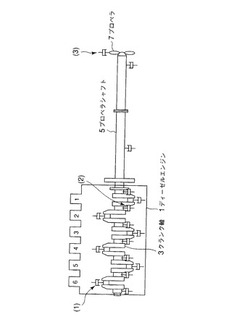
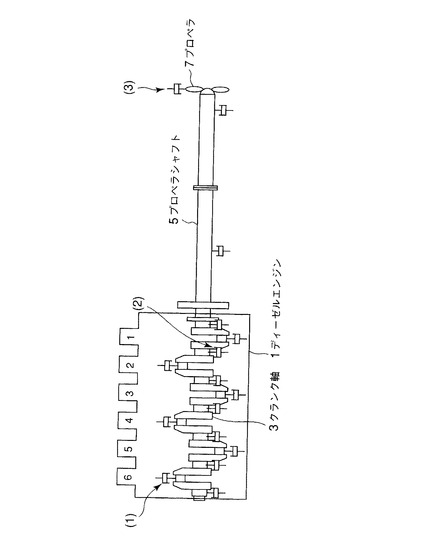
図1は、舶用ディーゼルエンジン1のクランク軸3と連結されたプロペラシャフト5と該プロペラシャフト5の先端に取り付けられたプロペラ7を示している。該ディーゼルエンジンのクランク軸系と捩り振動作用による各部減衰は、次の通りである。
(1)の部分は、ピストン等の往復運動部の摺動による減衰、およびクランクピン軸受けによる減衰を示し、絶対減衰という。バネ・マス振動モデルの節点(シリンダ中心)の捩れ角速度に対する減衰として与える。
(2)の部分は、主軸受けによる減衰を示し、相対減衰という。バネ・マス振動モデルの主軸受けを挟む節点の相対捩れ角速度に対する減衰として与える。
(3)の部分は、プロペラ減衰を示し、プロペラ減衰(被駆動装置・軸系上の付属物減衰)という。バネ・マス振動モデルのプロペラの回転抵抗をその節点の捩れ角速度に対する減衰として与える。
【0041】
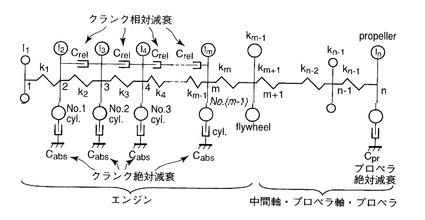
図2は エンジンクランク軸系のねじり振動解析のためのモデル例である。ねじり振動解析では一般に、軸系の前方(図2においては紙面左方)の機関自由端から後方(図2においては紙面右方)の被駆動装置側までに、節点を有限個設け当該節点に慣性質量を集中させ、慣性質量間はねじりバネで連結されるモデルを作成する。
【0042】
図2の例では節点1に最前方シリンダ(クランクスロー)より自由端側部分の慣性質量がまとめられている。節点2から(m+1)即ちcyl.1からcyl.mの節点に各シリンダ(クランクスロー)の慣性質量がまとめられている。L型エンジンならばm筒、V型エンジンならば2m筒の場合を示している。
後方最終端の節点nには被駆動装置(プロペラ)の慣性質量が置かれている。被駆動装置を複数節点に振り分けてもよい(例えば交流発電機を発電機本体と励磁機に分けてもよい)。
また、cyl.mの節点と後方最終端の節点nの間にはギア列、はずみ車部、継手・ダンパー部、中間軸部等を慣性質量として適宜与えてもよい。
【0043】
図2の例において、cyl.1からcyl.mの部分(節点2からm+1の部分)には、各シリンダ(クランクスロー)の軸受減衰が各シリンダ共通の絶対減衰係数Cabsを以って作用していることを示している。また、隣合う各シリンダ(クランクスロー)間には軸ヒステリス減衰が相対減衰係数Crelを以って作用している。節点nの被駆動装置(プロペラ)では起振エネルギーが吸収される。当該吸収エネルギーは絶対ふれ角に応じて吸収される絶対減衰エネルギーであり、プロペラの絶対減衰係数Cprをもって算定される。
【0044】
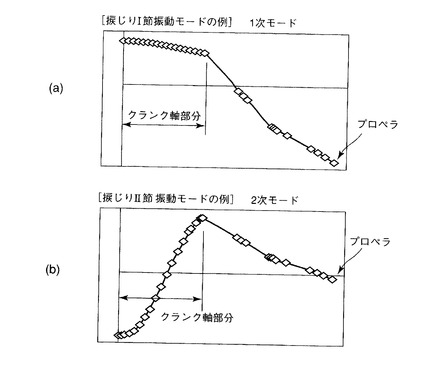
起振エネルギーと吸収(減衰)エネルギーの平衡を説明する前に、図4の振動モードについて説明する。
図4はねじり振動固有モード計算結果例を示している。該例においては二つの固有モード、即ちI節とII節の振動モードが示されている。I節モードではエンジンと被駆動装置(プロペラ)を連結する中間に節(振れ角0の点)が一つ存在する。II節モードではエンジン内クランク軸部の中間と被駆動装置(プロペラ)の極近傍の二箇所に節が存在している。勿論、II節モードの固有振動数の方がI節モードの固有振動数より高い。また、各固有振動数をエンジンの共振(危険)運転回転数で除したものを次数(一般に2サイクルエンジンでは整数であり4サイクルエンジンでは0.5の整数倍の数値である)とよんでいる。尚、エンジン・軸系によってはIII節以上の固有モードを検討する必要のある場合もある。
【0045】
図4のモード図に書き込まれてはいないが、節点iの慣性質量をIi,基準位置(一般に前端とする) ふれ角をθLとする。また、節点iにおける振れ角をθLβi とする(ここにβiは節点iのモード比である)。さらに、取り上げる対象の共振角振動数は ω とする。このとき、モード質量Ieが次式
により定義され、軸系の総減衰エネルギーは
総減衰エネルギー = 2ζ・π・ω2・Ie ・θL 2 (9)
である。ここに、ζは共振倍率Meの逆数の0.5倍となる所謂減衰比である。
【0046】
ねじり振動の持続共振状態においては起振エネルギー と軸系減衰エネルギーがバランスする。 ねじり振動計算上、起振エネルギーは高調波次数のトルクAkと共振モードのβj(J =1 〜m) の分布と着火間隔・着火順序とによってもとまるベクトルサム θL ・|Σj=2βj|により計算されるが、共振点の計測結果が知れているときは、式(9)により、当該起振エネルギーを算定せずとも総減衰エネルギーとして把握することもできる。
何故なら、モデル化の段階でIi は既知、βjiは固有モード解析段階で既知であり、式Ie(9)によりも知れる。一方、角振動数ω の共振時計測により、θLも計測され、減衰比ζも所謂「半値幅ルール(図3参照)」を用いて把握できるためである。
【0047】
図2、4のモデルに則して、総減衰エネルギーは式(10)のようになる。
したがって、式(9)および(10)から次式を得る。
【0048】
式(11)の右辺第1項はクランク絶対減衰に、第2項はクランク相対減衰に、第3項は被駆動装置(プロペラ)絶対減衰に関わる項である。前述のように、Cprは公知もしくは評価可能であり、式(11)は未知変数CabsおよびCrelのみに関する方程式となる。CabsおよびCrelをそれぞれ改めてAおよびBとかけば一つの共振モード・共振振動数の組に対して、一つの方程式(12) が得られ
a1A+b1B=c1 (12)
の形を得る。もう一つの共振モード・共振振動数の組に対して、同様に方程式(11) を得れば
a2A+b2B=c2 (13)
式(12)および(13)を連立させ、2元連立1次方程式として解けば定数としての解AおよびBを得る。
従来、試行錯誤的に設定されていた機関の減衰係数を実機の実際に則したものとして求めることが可能となる。
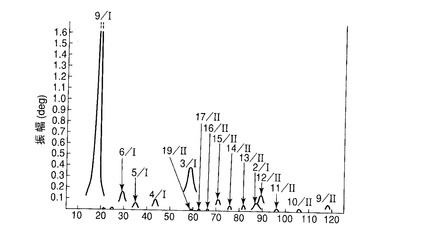
【0049】
図5に示すように、一般に、共振モード・共振振動数の組は多数存在する。I節モードでも次数によって複数の共振点が存在する。このため、未知定数AおよびBに対して3個以上の組を取りたいときは、最小二乗法の手法を取り入れればよい。例えば、3個の共振点より定数AおよびBに関する3個の連立方程式
を採用した場合、誤差関数 f として例えば、
f= (a1A+b1B−c1)2+(a2A+b2B−c22)2+(a3A+b3B−c3)2 (15)
のように置けば、fはA,Bに関する正値二次形式であり、fのAによる偏微分を取り0と置くこととfのBによる偏微分を取り0と置くこととにより、AおよびBに関する2元連立1次方程式に帰着可能となるから、最小二乗近似の意味においてAおよびBについて解くことができる。
【0050】
上記の式(14)の場合は未知数に対して方程式の数が過剰に存在する場合であるが、未知数の数に対して方程式の数が不足場合であっても最小二乗法による解法は成立する。例えば、上記の式(14)が単に
a1A+b1B=c1 (16)
のみの一方程式となっても、
式(15)の誤差関数fの右辺を第1項のみを採り
f=(a1A+b1B−c1)2 (17)
とすれば、AおよびBに関する2元連立1次方程式に帰着可能となるからである。
【0051】
以上のように式(14)の3個の連立方程式は最小二乗法の手法を用いて解くこともでき、絶対減衰係数Aおよび相対減衰係数Bに関する連立方程式の数に過不足があっても最小二乗法の手法により解くことが可能であり、かつ、方程式の数と未知数の数が一致しない場合でも、減衰係数を求めることができる。
そして、絶対減衰係数と相対減衰係数とが明確に峻別され、実機に則したものとして求めることが可能となる。したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。また、エンジン軸系のねじり振動を正確に把握できるようになるため、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることができる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与する。
【0052】
次に、式(14)の3個の連立方程式は一般逆行列の手法を用いて解くことについて説明する。
絶対減衰係数Aおよび相対減衰係数Bに関する連立方程式の数に過不足があっても一般逆行列の手法により解くことが可能である。この一般逆行列の手法も、方程式の数と未知数の数が一致しない場合でも適用可能な、より一般化された減衰係数の求め方である。
一般逆行列ついて簡単に説明すると、行列表示の連立方程式
Dx=b
において、D が正方(行の数と列の数が一致)行列でない、一般のm行n列の場合でも未知数ベクトルとしてのxを
x=D−b
のように与えることを可能とする行列 D− のことを指している。行列 D− には最小ノルム型一般逆行列、最小誤差型一般逆行列、反射型一般逆行列および当該三者の性質を兼ね備えるMoore−Penrose型一般逆行列がある。
それぞれ、高次元空間の部分空間への射影子としての意味付けを与えることもでき、x=D−b は最小二乗法とは別角度から見た連立方程式解法にもなる。
尚、m行n列のDに対してn行m列の一般逆行列D− はDD− D =D を可能とするものと定義される。
【0053】
このように最小二乗法によっても、一般逆行列を用いても、絶対減衰係数と相対減衰係数とが明確に峻別され、実機に則したものとして求めることが可能となる。したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。また、エンジン軸系のねじり振動を正確に把握できるようになるため、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることにもなる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与する。
【0054】
次に、絶対減衰係数Aおよび相対減衰係数Bを定数として捉えたが、そのように限定しなくてもよいことをまず最小二乗法の例で示す。
例えば、AおよびBをエンジン回転数即ち角振動数ωの関数(ここでは簡単のため1次関数)として、
A = p+ q ω (18)
B = r+ s ω (19)
と置く。ここで、p ,q ,r , および s が定数であり、AおよびBはωの1次関数となる。
【0055】
いま、共振点計測が3点の式(14)は
a1(p+ q ω1)+b1(r + s ω1) =c1
a2(p+ q ω2)+b2(r + s ω2) =c2 (20)
a3(p+ q ω3)+b3(r + s ω3) =c3
の形となる。
【0056】
上式(20)にてp ,q ,r , およびs以外の変数は計算・実測から既知となるから、上式(20)は未知定数p ,q ,r , および s の4元の連立1次方程式となる。未知数の数に比べ方程式の数は不足するが、上述のように最小二乗法を用いて、p ,q ,r , および s は求めることができることが分かる。勿論、計測点を4点以上としてもよい。
【0057】
この未知定数p ,q ,r , および s の4元の連立1次方程式には、また、前述の一般逆行列の手法が適用できることにもなる。絶対減衰係数Aおよび相対減衰係数Bを一定の定数とせず、角振動数ωの関数として捉えようとする際においても、最小二乗法或いは一般逆行列の手法を用いて絶対減衰係数および相対減衰係数を実機に則して把握することができる。
【0058】
更にまた、式(18)、(19)における1次関数は2次以上の多項式関数であってもよいし、有限の直交関数近似式や内外挿補間式であってもよい。エンジン軸系を含む構造物の減衰を絶対減衰と相対減衰に峻別し、それぞれを、複数の共振応答実測結果と対応させ評価させる手法を、本発明は明示している。
【0059】
尚、本発明の最も簡素な適用例に関して補足する。絶対減衰係数Aおよび相対減衰係数Bが定数であって、それらに関する連立方程式の数は過不足なく二つである場合である。2個の共振点より定数AおよびBに関する2個の連立方程式
a1A +b1 B=c1
a2A+b2B=c2 (21)
を採用する場合であり、例えば、図4に示されたように、エンジン・プロペラ軸系のI節モードより計測共振点を1個採り、もう一つの計測共振点をII節モードより採る。ここで、それぞれが上式(21)の第1式および第2式に対応する。
【0060】
I節モードにおいては、クランク軸部分は全体に略一様のねじれ振れ角を以って振動していて、各シリンダ(クランクスロー)間の相対ねじれは0と看做せる。従って、式(21)の第1式においてb1= 0 と看做せる。
【0061】
また、当該I節モードではプロペラの振れ振幅が顕著であり、明確なc1が把握でき、まず絶対減衰係数Aが簡単に求まる。このAを以って第2式に代入しBについて解けばよいが、この際、II節モードのプロペラ減衰は実質0(プロペラ振れ角が非常に小さい)故、c2の算定も簡単に求めることができる。
【0062】
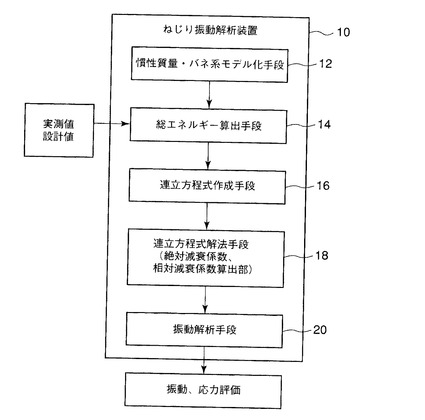
次に、以上説明した機関絶対減衰係数および機関相対減衰係数を求める方法を実施するための動力伝達軸系のねじり振動解析装置10について、図6を参照して説明する。
この動力伝達軸系のねじり振動解析装置10は、ディーゼルエンジン1と被駆動装置のプロペラ7とを連結する動力伝達軸であるプロペラシャフト5のねじり振動解析装置であり、該エンジンからプロペラ7までを慣性質量・バネ系にモデル化する慣性質量・バネ系モデル化手段12を有し、図2のような解析モデルを作成する。
【0063】
さらに、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する総エネルギー算出手段14を備え、該総エネルギー算出手段14においては、図3に示す実測の応答曲線結果から固有モード・固有振動数の共振点における半値幅に基づく減衰比ζを求め、さらにクランク軸3の前端での振れ角θLを検出し、さらに、節点iの慣性質量をIi等の設計値を入力して、式(9)に基づいて、共振点における総減衰エネルギーを算出する。
【0064】
さらに、前記算出した総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表して、絶対減衰係数および絶対減衰係数に関する複数個の方程式を複数個の共振点において作成する連立方程式作成手段16を備えている。
【0065】
すなわち、前記(9)式によって算出した総減衰エネルギーを、式(11)のように、
1項はクランク絶対減衰に、第2項はクランク相対減衰に、第3項は被駆動装置(プロペ
ラ)絶対減衰に関わる項として表す。CabsおよびCrelをそれぞれ改めてAおよびBとかけば一つの共振モード・共振振動数の組に対して、一つの方程式a1A +b1 B=c1が得られる。そして複数個の共振点において作成して式(12)、(13)のように連立方程式を作成する。
【0066】
さらに、前記複数の連立方程式を解いて、機関絶対減衰係数および機関相対減衰係数を求める連立方程式解法手段18を備えており、一般的に未知数(A、B)の数と方程式の数とが一致した場合の解法による求め方での算出、さらに、方程式の数と未知数の数が一致しない場合でも、最小二乗法或いは一般逆行列の手法を用いて絶対減衰係数および相対減衰係数を算出する。
【0067】
さらに、前記連立方程式解法手段18によって算出された絶対減衰係数および相対減衰係数を用いて、式(22)の多自由度系の運動方程式を解いて、図2に示したモデルの捩り振動を解析して、捩り振幅、応力等を算出する振動解析手段20を有している。
【0068】
(22)
Im:m番目の節点の慣性モーメント、θm:m番目の節点の捩れ角
fi:i番目のシリンダに加わるクランク軸回転方向接線力(i=1、2、…、(m−1))
【0069】
これを行列の形で書くと
と纏めることができる。
このとき、軸系の固有振動数・固有振動モードは、
Kβ=ω2Mβ
ω:固有振動数、 β:固有振動モード
なる固有値問題として解くことができる。
【0070】
連立方程式解法手段18によって算出された絶対減衰係数Cabsおよび相対減衰係数Crelが用いて、振動解析手段20によって運動方程式を解いて、エンジン軸系のねじり振動の運動を解析し、応力、振幅を評価して、設計に反映する。
【0071】
以上のような動力伝達軸系のねじり振動解析装置10によれば、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、該減衰係数を利用してさらに捩り運動解析をすることで、精度良い減衰係数に基づいて設計されるため、安全性、信頼性が向上する。また、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。
【0072】
また、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、動力伝達軸系のねじり振動解析装置10を構成する、慣性質量・バネ系モデル化手段12と、総エネルギー算出手段14と、連立方程式作成手段16と、連立方程式解法手段18とを有して、絶対減衰係数および相対減衰係数を求めるプログラムを構成すれば、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、本発明はコンピュータによる計算が必須であるため、かかるプログラムによって、または、かかるプログラムを記憶した記憶媒体をコンピュータに読み取らせることによって、エンジン被駆動装置間の軸系装置の有用な設計手法となる。
【0073】
上記までは、前記Cabs=A,Crel=Bに関しての連立方程式に帰着させ、前記最小二乗法あるいは前記一般逆行列解法をもって、A,Bにつき求解するものであった。一方、連立方程式を解く方法には、一般的に未知数ベクトルを、ベクトル列の収束極限として捉える方法もある。例えば、共役傾斜法、加速緩和法等が構造解析分野において、広く用いられている。
しかしながら、応用力学系の分野等の大規模解析における、長大行列を扱う訳でもないが、変分原理や仮想仕事の原理あるいは適正な収束アルゴリズムに則した数理公式に従い、繰返し算式を用いて解くことも可能である。
強いて言えば、最小二乗法や一般逆行列解法に繰返し算法(行列の級数展開手法の意味を含め)の意味付けをあたえることが可能であるから、上記共役傾斜法、加速緩和法等の繰返し算法一般も、最小二乗法や一般逆行列解法の一応用とも言うことができる。
【0074】
一方、連立方程式系を直接的に解かない別の方法が存在する。方程式系の各未知数を大きく振って、試行錯誤(トライアンドエラー)的に方程式の満たされる度合い(満足度)を評価して、最適な組合せにおける、未知数あるいは未知数ベクトルの答えとする手法である。ここで言う満足度とは、方程式系の中に含蓄される、パラメータ(制御因子や誤差因子であってもよいし、それらの分散であってもよいし、また、それらの組合せパラメータであってもよい)を評価基準とする、感度解析法であってもよい。モンテカルロ法も、試行錯誤の手間を厭わない種類の該試行錯誤手法の一つと見なしてもよい。
【0075】
試行錯誤(トライアンドエラー)法の端的な例は、方程式系の未知数に試しの数値を種種代入し、右辺と左辺の差がゼロあるいは右辺と左辺の比が1に近づくものを探査する手法である(これも一種の感度解析とみなすことができる)。解に近づくためには、挟み撃ちの手法を導入してもよい。高次元の場合は、領域を段階的に絞り込む手法であってよい。ここで留意すべきは、方程式系あるいは最適化目的関数が滑らかな連続関数でなくパラメータの離散関数であってもよい。
又、目的量の分散(S/N比はその逆数指標として位置付けられてもよい)の極小化(極大化)を感度解析指標としてもよい。
【0076】
上記該試行錯誤手法はまた所謂実験計画法(非特許文献、岩波書店、数学事典参照)の応用であってもよい。ここで言う実験計画法応用手法とは、試行錯誤の場合の数を節約するために、直交表(直交配列、同上非特許文献、岩波書店、数学事典参照)を応用するものである。直交配列乃至直交表とは、画像の表現におけるアダマール変換行列(正方行列)の部分の行あるいは列を採り上げ、当該正方行列次元には不足するものの、複数の直交基底からなる集合に対応している。つまり、あるn次元ベクトルを、nより小さい数の基底で精度よく近似させる算段でもあると理解してもよい。このような理解からは、実験計画法は、最近一般的になった、多重解像度分解やウェーブレット解析の延長からの位置付けが与えられても不思議はないが、この延長線上の数理工学あるいは工業上利用な確たる技術として纏ってはいない。
【0077】
その主たる理由は、従来、実験計画法とは多元方程式のトライアンドエラー解法であると割切る立場からの取組みが無く、却って最近の最適化数理や多変量解析の数理の流用をもって理論武装する傾向があるためとも考えられる。しかしながら、また一方、直交表の原理、ラテン方陣や半群理論等の理解は当業者間でも概して皮相的乃至希薄であり、実用的手法の面が強調されることが多い。本発明の観点は試行錯誤(トライアンドエラー)法並びに感度解析法との位置付けに立脚するので、不明瞭さはない。又、オーソライズされた或いはオーソライズされうる直交表に従ったパラメータ振りをするから実用性もある。
取分け、クランク軸系のねじり振動解析分野にあって、相対減衰係数、絶対減衰係数の同定問題に関する開示は見られない。即ち本発明における、最小二乗法あるいは一般逆行列を用いる、絶対減衰係数および相対減衰係数の同定手法と並行する好適な応用例を開示する。以降の更なる開示は、最小二乗法あるいは一般逆行列を用いる解法の一形態と見なせることは前記したが、当該開示は、実験計画法あるいは多変量解析手法との接点に位置する技術と見なしてもよい。ただし、当該開示は、実験計画法あるいは多変量解析手法等の統計学的な長々しい理論を繰返すものでもない。実際、当該開示において、実験計画法あるいは多変量解析手法等の統計学的な分野から援用する用語は、平均、分散、S/N比(シグナル・ノイズ比)、因子、水準、直交表等で十分事足りる。説明上必要となる該分野の専門用語が、現れた場合もしくは、都度言及するものとする。
【0078】
当該開示を示す理由は、次の点にある。即ち、未知数の数に過不足のある数の連立方程式系が、得られたとき、最小二乗法あるいは一般逆行列を用いて、絶対減衰係数および相対減衰係数の同定が有効に実施されるにせよ、個々の方程式は共振振幅点に対応して得られるものであるから、計測振幅値あるいは半値幅の計測誤差の影響が、得られた個々の方程式に残留してしまう。斯かる計測誤差の影響を排除するには、例えば、最小二乗法あるいは一般逆行列解法の観点からは、計測点数あるいは、行列の行数もしくは列数を大きくする必要性が生じる。場合により、共振振幅点の重複を含め、計測回数を増やすことも考えられる。つまり、誤差の影響を排除する上では、計測点(計測共振点)の選定に計画性があってしかるべきである。この意味で、最小二乗法あるいは一般逆行列手法のみでは不自由なのである(裁量の余地が広すぎるきらいがある)。また、得られている方程式(具体的には各未知数に掛かる定数項)は、想定外の影響因子、例えば、ここでは、大気温度/湿度/エンジン油温/エンジン冷却水温度/運転負荷/排気温度等々の二次的因子の影響があって、求解が阻害される可能性がある。このようなときも、最小二乗法あるいは一般逆行列手法のみでは不自由である。こうした不自由さの緩和策を該開示は与えている。
【0079】
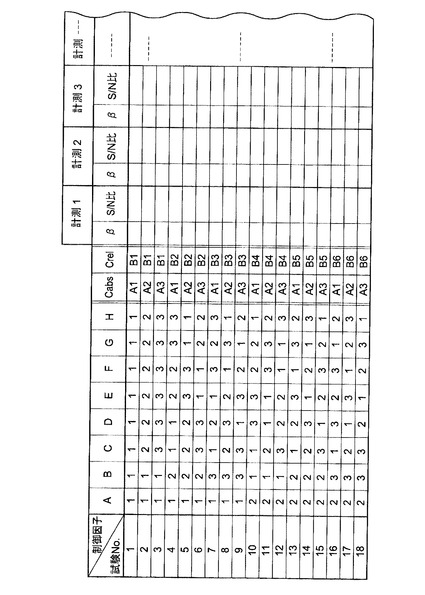
当該開示では、このため、実験計画法の直交表を利用する。相対減衰にnrel(個の)水準、絶対減衰にnabs (個の)水準の数値を振り、nrel x nabsの組合せを実験・計測回数(ここでは相対減衰/絶対減衰の組合せケース)として直交表の行を当てる。直交表の各列には計測一事象を対応させる。尚、当該表の二列分には絶対減衰係数および相対減衰係数の水準値(レベル)を明記する欄としてもよい。残る各列の各行には、当該列の計測結果に応じて(又当該行の)、感度評価値を埋めてもよいし、S/N比を充当してもよい。また、縦列の計測ケースの数が、慣用の該直交表の規格列数に不足していてもよく、データ不足列は、ダミー因子、たとえば、仮想的な計測時湿度(実質計測出力に影響なしと見なせる因子)の下での計測ケース欄として充当することもできる。
【0080】
慣用的なL18直交表を用いた場合を例にとり、説明する。L18直交表は図7に示すように、2水準の因子1個、3水準の因子7個つまり2×37 =4374通りの組合せの実験を18回の実験で済ますようなときに用いられ、18行8列の表である。各行に対して1種1個づつの計測データ値が元来対応する。各列は元来各因子のどの水準が割り当てられるかを示している。2水準の因子の列の場合、1が9回、2が9回現れ、また、3水準の因子の列の場合1が6回、2が6回、3が6回現れる。直交表では、1つの因子の水準が一つの値(整数)の行について抜き出すと他の因子については、その他の因子の各水準が同数回出現するようになっている。L18直交表は、18個のデータ値y1,y2,y3, ・・・・・・,y17,y18
が得られるとき、24個の未知数(データ平均値と2+3x7の都合24個)即ち、m,a1,a2,b1,b2,b3,c1,c2,c3,d1,d2,d3,e1,e2,e3,f1,f2,f3,g1,g2,g3,h1,h2,h3,の24個の未知数に対して18個の式並びに、上記の対称性(各因子水準の和が原点移動可能)より8個の式、合計26個の式の成立を意味している。具体的に方程式系を記述すれば、次の通りである。
(*1) y1=m+a1+b1+c1+d1+e1+f1+g1+h1
(*2) y2=m+a1+b1+c2+d2+e2+f2+g2+h2
(*3) y3=m+a1+b1+c3+d3+e3+f3+g3+h3
(*4) y4=m+a1+b2+c1+d1+e2+f2+g3+h3
(*5) y5=m+a1+b2+c2+d2+e3+f3+g1+h1
(*6) y6=m+a1+b2+c3+d3+e1+f1+g2+h2
(*7) y7=m+a1+b3+c1+d2+e1+f3+g2+h3
(*8) y8=m+a1+b3+c2++d3+e2+f1+g3+h1
(*9) y9=m+a1+b3+c3+d1+e3+f2+g1+h2
(*10) y10=m+a2+b1+c1+d3+e3+f2+g2+h1
(*11) y11=m+a2+b1+c2+d1+e1+f3+g3+h2
(*12) y12=m+a2+b1+c3+d2+e2+f1+g1+h3
(*13) y13=m+a2+b2+c1+d2+e3+f1+g3+h2
(*14) y14=m+a2+b2+c2+d3+e1+f2+g1+h3
(*15) y15=m+a2+b2+c3+d1+e2+f3+g2+h1
(*16) y16=m+a2+b3+c1+d3+e2+f3+g1+h2
(*17) y17=m+a2+b3+c2+d1+e3+f1+g2+h3
(*18) y18=m++b3+b3+c3+d2+e1+f2+g3+h1
(*19) a1+b3=0
(*20) b1+b2+b3=0
(*21) c1+c2+c3=0
(*22) d1+d2+d3=0
(*23) e1+e2+e3=0
(*24) f1+f2+f3=0
(*25) g1+g2+g3=0
(*26) h1+h2+h3=0
上記で式(*1)から式(*18)の辺々和をとれば, 式(*19)から式(*26)の対称性より右辺の和はmの18倍となりmが簡単に求まる。また、例えばb1に関し、(*1)から式(*3)および(*10)から式(*12)の辺々和をとれば, 式(*19)および式(*21)から式(*26)の対称性より右辺の和はb1の6倍となるのでb1も簡単に求まる。このようにして未知数24個が全て簡単に求まる。尚、式(*19)から式(*26)の各右辺は0としているが、既知の各平均値としても議論の一般性は損なわれない。この連立方程式解法は、数理的表現で言直すと、式(*1)から式(*18)を行列表示に改めて考えるとき、当該行列がアダマール行列(各成分が1若しくは−1からなり、異なる行または列のベクトル内積が0、あるいは、各成分が1若しくは1の複素n乗根すなわち1の高次の累乗根からなり、異なる行または列のベクトル内積が0となる行列)に対応させることが可能で、その一般逆行列が容易に与えられることと理解してよい。即ち、直交表を用いる実験計画法自体、一般逆行列解法の一種と見なしてもよいことを示した。
【0081】
直交表を用いる本発明の好適例は、上記の説明に止まるものではない。本発明の主眼は、前記相対減衰係数および絶対減衰係数係数の求解すなわち同定に、直交表を用いる実験計画法的な手法の開示を与えることにある。図7で直交表L18の例を示したように、直交表の各行各欄は因子の水準の組合せを示すものであった。前記相対減衰係数および絶対減衰係数係数の試みの値をそれぞれ、、nrel(個の)水準およびnabs (個の)水準で振ることを考えるとき、まず、nrel x nabsの組合せ数が、慣用直交表の行数と一致するようにする。因子としての相対減衰係数および絶対減衰係数係数の並べは、直交表の直交する2列のそれぞれに対応させる。つまり、相対減衰係数および絶対減衰係数係数の組合せの並べは直交表の前記対称性を満足している。この際、各行を右方に延長し、計測事象数に応じて列の欄を設けあるいは、延設して、各計測に対応して各升目に感度評価値あるいはS/N比若しくは両者を峻別できるように充当する。出来上がった表から、因子としての相対減衰係数および絶対減衰係数係数の各々に関しての要因効果評価が可能となり、因子の水準レベルを絞りこめる。ここで、絞り込みにあたっては、まず感度評価値が目標値に近づくようにしてから、S/N比が最適となるようにしてもよい。このように、方程式を直接解くことなく、未知数としての相対減衰係数および絶対減衰係数係数を絞り込み求解することが、本実施例により可能となった。しかも、温度、湿度、油温さらには離散的な誤差因子パラメータの介在を許容して計測に伴う誤差を抑制する手法を提供しているので、産業応用上の有用性を広げている。
【0082】
本実施例における感度評価について、更に説明しておく。旧来の実験計画手法において、感度とは、通常、ある因子に関して対象出力値のカーブ(通常直線近似)の傾きとして捉えることが一般的である(所謂、当該分野での動的機能法)が、本実施例での定義は更に広い。前記したように、連立方程式系を直接的に解かない別の方法であって、方程式系の各未知数を大きく振って、試行錯誤(トライアンドエラー)的に方程式の満たされる度合い(満足度)を評価して、最適な組合せにおける、未知数あるいは未知数ベクトルの答えとする手法に本実施例は該当している。ここで言う満足度とは、各未知数が振られたとき、方程式系(ここでは、方程式系と言うより、求解の対象システムにおける既知の関係式と呼んでもよい)の中に含蓄される、パラメータ(制御因子や誤差因子最適度合であってもよいし、それらが持込む目的値の分散最小化度合であってもよいし、また方程式左右両辺の一致度合でもよい)の最適度合を指す。
より具体的には、前記のように、絶対減衰係数Cabs=A、および相対減衰係数Crel=Bとして、A、およびBに関しての関係式としては、Aが6水準の6種、Bが3水準の3種ならば、6×3=18個の次式
aiA+biB=ci(ζi), (i = 1,2・・・,18) (23)
が成立する。ここで、係数ai,biは前記ねじり振動計算上,節数,次数毎に与えられている(式(12)の導出と同様)。前述での連立方程式解法の観点からは、ciは前記半値幅ルールに従って実験的に求められた減衰比ζi の関数として各ciは求められた。ここではA、Bがパラメータ振りによって与えてしまうので各定数項ciは、上式(23)の左辺の計算により計算される。実験値のζi (ζi実 とする)から各ciは求める操作の逆操作により(具体的には式(5)を用いる)、ここで計算された該各定数項ciから計算値のζi(ζi計 とする)が得られる。つまり、ζi実 とζi計 との一致度、即ち両者の比(これをここではβとおく)が1、dB換算で0に近いほど満足度は高いと評価してよい。本実施例では感度をこのようにとらえることが可能なことも示している。
【0083】
上記の手順に従い、相対減衰係数因子および絶対減衰係数因子に対しての要因影響度評価を模式的に示したものが、図8a(S/N比)および8b(感度dB換算)である。感度βが1(当該dB値が0)に近づくように絶対減衰係数Cabs=A、および相対減衰係数Crel=Bの存在推定領域を絞り込みが可能となる。要すれば、Aの6水準の値およびBの3水準の値を狭めてとり、再度、要因影響度評価を行えばよい。
また、図9は、相対減衰係数因子および絶対減衰係数因子の範囲が絞り込まれた段階において、横軸に絶対減衰係数、縦軸に相対減衰係数およびS/N比をとり、要因効果を示したものである。相対減衰係数と絶対減衰係数の間には、想定の関係式(式11)から、線型の関係が確認される(図9中の点線)。一方S/N比は放物線状を成しており、極大値点が存在することが分かる。この極大値を与える、絶対減衰係数値と相対減衰係数値の組が、最適解になっている。
【産業上の利用可能性】
【0084】
本発明によれば、絶対減衰エネルギーもしくは絶対減衰係数、並びに相対減衰エネルギーもしくは相対減衰係数を、エンジン実機に則した値に算出可能として動力伝達系のねじり振動解析に反映させることができるため、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法、解析装置への適用に対して有益である。
【図面の簡単な説明】
【0085】
【図1】ディーゼルエンジンのクランク軸系の構成と、捩り振動作用による各部減衰を示した説明図である。
【図2】本発明の実施形態に係る、エンジンと被駆動装置を連結する動力伝達軸系の解析モデルである。
【図3】本発明の実施形態に係る、軸系の共振点振幅応答線図例であり、減衰比を実測より求める方法を示す説明図である。
【図4】本発明の実施形態に係る、エンジンと被駆動装置を連結する動力伝達軸系の固有モードの例を示し、(a)がねじりI節振動モードであり、(b)がねじりII節振動モードである。
【図5】一般的なエンジンの共振モード・共振振動数の組の存在を示す説明図である。
【図6】本発明の実施形態に係る、動力伝達軸系のねじり振動解析装置の構成を示すブロック図である。
【図7】本発明の実施形態に係るL18直交表の例である。
【図8】(a)は本発明の実施形態に係るS/N比の例である。 (b)は本発明の実施形態に係る感度の例である。
【図9】本発明の実施形態に係る要因効果図の例である。
【符号の説明】
【0086】
1 ディーゼルエンジン
3 クランク軸
5 プロペラシャフト
7 プロペラ
10 ねじり振動解析装置
12 慣性質量・バネ系モデル化手段
14 総エネルギー算出手段
16 連立方程式算出手段
18 連立方程式解法手段
20 振動解析手段
【技術分野】
【0001】
本発明は、エンジンにより駆動される舶用推進装置、発電機装置、車輌駆動装置等の軸系動力伝達装置に関し、特に、動力伝達系のねじり振動解析方法、解析装置、解析プログラム、およびエンジン被駆動装置間の軸系装置に関する。
【背景技術】
【0002】
エンジンにより駆動される舶用推進装置、発電機装置、車輌駆動装置等の軸系動力伝達装置における設計技術は、地球環境保護、省エネルギーの観点から益々重要となってきている。
当該観点より、エンジンの高度化開発においては、性能と構造強度が鬩ぎ合い、強度余裕(安全率)のより正確な把握が技術課題として浮上してくる。特に、舶用推進主機の軸系のような場合、過大な余裕は高性能化を阻害し、余裕の不足や不正確な予測評価は海難事故(漂流)の原因ともなりかねない。当該エンジン軸系の応力・強度の正確な評価計算上に不可欠な軸系減衰データの捉え方は、今尚確立されていない。
【0003】
ねじり振動計算の手順として次のようなものが知られている。
(1)慣性質量-バネ系へのモデル化。
(2)同上モデルの固有(節)モード・固有振動数の算定。
(3)各固有モード・各固有振動数におけるエンジン軸系ねじり起振トルク(エネルギー)の計算。
(4)各固有モード・各固有振動数における軸系減衰エネルギー(プロペラ減衰、発電機減衰、被駆動装置減衰、継手・ダンパー減衰、軸受減衰、クランク軸ヒステリシス減衰、エンジン減衰等)の評価・計算。
(5)共振時の起振エネルギーと減衰エネルギーの平衡条件仮定に基づき、各固有モード・各固有振動数における慣性質量各部のねじれ振幅角の算定並びに各軸部の応力算定。
(6)実機試運転時のねじれ振動計測による安全性の確認。
【0004】
上記のモデル化や固有値解析((1)、(2))の精度は高く、一般に計測結果との対応は良い。軸系装置や構造物の固有値解析は、離散化モデルの要素数の多寡に依らず、比較的精度が期待できることによる。
また、エンジン側よりの起振エネルギーの評価(3)も適正なトルクハーモニックス入力とベクトルサム計算を以って、精度は概して期待できる。
【0005】
一方、減衰エネルギーの計算(4)において、プロペラ減衰に関しては、旧来、多くの研究(例えば非特許文献1)があり、又、発電機、軸継手・ダンパー、被駆動装置の減衰に関しては、それぞれメーカから入手可能である。
しかしながら、エンジン内部の軸受減衰(機関減衰を含むものとする。又、各慣性質量部のふれ角絶対値依存であり絶対減衰とカテゴライズする)や軸ヒステリス減衰(隣合う慣性質量部間のバネ即ち軸部の相対ねじれ角依存の減衰であり相対減衰とカテゴライズする)については多くの研究がなされているにも拘らず、未だに不明確なところが大きい。
【0006】
流体弾性潤滑解析手法は進歩してきてはいるものの、解析モデルと実際との溝を埋めるに至ってはいない。また、材料ヒステリシス散逸エネルギー計算を適用するには(試みられてはいるが)、クランク軸形状はあまりにも複雑である。
従って、当該絶対減衰並びに相対減衰の捉え方は実績・経験に基づく、試行錯誤的なものとならざるを得ず、同一エンジン類似軸系以外への応用は一般に困難なものとなる。また、エンジン回転全領域での共振点における各振幅の計算・計測の一致を見ることも極めて困難である。
【0007】
従来のプラクティスでは当該の絶対減衰・相対減衰を低めに見積もり計算上の振幅・応力を高め(安全側)に導く傾向があった。従って、限界設計の視点を持込むこともできず、新規の設計や新たな解析では、過剰な余裕率を余儀なくされていた。
なお、捩り振動の減衰係数関連の特許文献については見られず、一般的な技術参考文献として非特許文献2が知られている。なお一方、数理用語に関しては、非特許文献3があり、必要に応じて参照している。
【0008】
【非特許文献1】W. Ker Wilson: Practical Solutionof Torsional Vibration Problems, 1956
【非特許文献2】舶用主機関のねじり振動、赤堀、山海堂、1963
【非特許文献3】数学辞典、岩波書店、第4版、2007
【発明の開示】
【発明が解決しようとする課題】
【0009】
本発明は、かかる従来技術の問題点に鑑み、上述のエンジンの絶対減衰並びに相対減衰エネルギーの算出精度をエンジン実機に合うように(実機の運転結果とより良く整合するように)向上させることを課題とする。
【0010】
被駆動装置が機関直結のプロペラの場合のエンジン・軸系のモデル例が図1に与えられている。同図においてcyl.1からcyl.mの部分は各シリンダに、また、n番目の節点にプロペラが置かれている。その他の節点の慣性質量は当該節点近傍の軸部、ギア列部分、はずみ車、継手・ダンパー部等をモデル化したものとなる。当然のことながら、図1のプロペラは被駆動装置一般に置き換えてもよい。
【0011】
図1において、cyl.1からcyl.mの部分(節点2からm+1の部分)には前述の絶対減衰が作用している。節点nのプロペラ部分にも絶対減衰が作用している。一方、隣接するシリンダ間には相対的なねじれに伴う相対減衰が作用している。
従って、具体的な課題はシリンダ(クランクスロー)部の絶対減衰エネルギーもしくは絶対減衰係数、並びにシリンダ(クランクスロー)間の相対減衰エネルギーもしくは相対減衰係数を、エンジン実機に則した値として算出して動力伝達系のねじり振動解析に反映させることである。
【課題を解決するための手段】
【0012】
上記課題解決のため、第1の発明は、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法であって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化し起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成し、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする。
【0013】
本発明では複数の共振持続状態点におけるエネルギーバランスの式である次式を基礎とする。
【0014】
(j=1〜m) の分布と着火間隔・着火順序とによってもとまるベクトルサム、ω は当該の固有モード・固有振動数における角振動数、Ciは各慣性質量部への減衰係数、θL は基準位置(通常前方自由端)の振れ角、βi
はi番目の慣性質量部の無次元ねじれ角(モード比)である。
【0015】
ここで、Akはk次における高調波次数のトルク、Cabsはエンジン各シリンダ(各クランクスロー)部の絶対ふれ角に作用する絶対減衰係数、Crelはエンジン各シリンダ(各クランクスロー)部間の相対ふれ角に作用する相対減衰係数であり、Cprは被駆動装置(プロペラ)部の絶対ふれ角に作用する絶対減衰係数である。
【0016】
一方、式(1)の左辺の起振エネルギーは当該共振モード・共振次数(k次)における高調波次数のトルク Akと共振モードのβj(j=1〜m)の分布と着火間隔・着火順序とによってもとまるベクトルサムをθL 倍した値すなわち
【0017】
とかくことができる。即ち、式(1)、(3)および(2)より
まることになる。
【0018】
一方、次式(5)で定義される ζ はエンジン減衰比と呼ばれる。
【0019】
とができる。実測より、複数個の共振点(角振動数ω)においてエンジン減衰比ζは半値
ができる。
勿論、式(3)に則して起振エネルギーより求めてもよい。
【0020】
以上より、慣性質量部の無次元ねじれ角(モード比)βi,等価慣性モーメント(モー
比ζは実測より求めることができる。
【0021】
の減衰係数Cprは装置供給者側からのデータ入手が可能(もしくは論文により公知)であるから、着目する共振点の個数に応じた個数の方程式(2)を得る。
【0022】
ここで、方程式(2)は、上述のように絶対減衰係数Cabs および相対減衰係数Crelに関する方程式になっている。両者を角振動数に依存しない定数と簡潔に考えるときは、適正な二つの共振点の実測より方程式(2)を二つ連立させ解くこともできる。
【0023】
なお、好ましくは、ねじりI節固有振動モードから前記総減衰エネルギーを算出し、既知の被駆動装置・軸系上の付属物の減衰エネルギーと、前記ねじりI節固有振動モードにおける相対減衰エネルギーが無視可能であることに基づいて、前記機関絶対減衰係数を求めるとよく、さらに、ねじりII節固有振動モードから前記総減衰エネルギーを算出し、該総減衰エネルギーより前記機関絶対減衰係数および前記既知の被駆動装置・軸系上の付属物の減衰エネルギーを減算して機関相対減衰係数を求めるとよい。
【0024】
例えば、舶用推進軸系でプロペラ・エンジン直結の場合、最も単純明快な手法は実測共振点の一つをI節固有振動モードから選択すれば(図3参照)、相対減衰の項は無視可能ともなり、方程式(3)は絶対減衰係数Cabs のみの1次方程式となりCabs は直ぐにもとまる。
さらに、II節モードより実測共振点の一つを選べばプロペラの振幅βnは略零となるため、プロペラ減衰を無視できて(図3参照)、直近で得られたCabs を用いて、II節モード共振に関する方程式(2)をCrelに関して解くこともできる。
【0025】
本発明の意図するところは、CabsおよびCrelについて解くために二つの方程式(2)を選びそれを解くことに限定されるわけではない。今、CabsおよびCrelをそれぞれ未知数AおよびBとすることにする。方程式の数は3個以上あっても問題はない。
【0026】
方程式の数が3個以上あっても、複数の連立方程式を最小二乗法により、または、連立方程式を一般逆行列解法により、当該機関絶対減衰係数および当該機関相対減衰係数を求めることができる。
例えば、最小二乗法の手法を適用できることを示す。
3個の共振点より定数AおよびBに関する3個の連立方程式
a1A+b1B=c1
a2A+b2B=c2 (6)
a3A+b3B=c3
を得たとする。
【0027】
ここで誤差関数 f を例えば、
f= (a1A+b1B−c1)2+(a2A+b2B−c2)2+(a3A+b3B−c3)2 (7)
のように置けば、fはA、Bに関する正値二次形式であり、fのAによる偏微分を取り0と置くこととfのBによる偏微分を取り0と置くこととにより、AおよびBに関する2元連立1次方程式に帰着可能となるから、最小二乗近似の意味においてAおよびBについて解くことができる。
【0028】
また、上記3個の連立方程式を一般逆行列の手法を用いて解くこともできる。式(6)および(7)を用いるこの手法は、二つの未知数AおよびBに関しての丁度二つの方程式を解く手法を包含する、より一般的な手法となっている。
さらに後述のように、AおよびBは角振動数ωに依存するωの多項式関数あるいはω依存の特殊内挿関数と考え、それらの展開係数を求める最小二乗法によって求めることも可能である。
【0029】
上記の最小二乗法あるいは一般逆行列解法は、単に連立方程式を解くと言う意味を超えて、最適問題解法或いは最適計画ツールとして認識することもできるし、特に後者は、非正方行列の特異値分解(一種のスペクトル分解)に応用される。つまり、未知数の個数に対して、方程式系の個数に過不足があっても、物理的、統計学的、幾何学的あるいは情報科学的等の観点から意味のある答えを提示するツールであり、連立方程式解法の如何なる解法も、これら両手法との関連を否定できないとも考えられる。つまり、おおかたの解法はそれぞれ個性はあっても、これら両方法の流れの中で見て均等手法と見なせると言える。
【0030】
一方、連立方程式或いは一変数の方程式の解法として、原始的な試行錯誤法(トライアンドエラー法)というものも存在する。つまり、最も原始的な取組み方は、未知数乃至は未知数ベクトルをランダム(乱数発生手段による)に振って、方程式系の右辺と左辺の差が0(あるいは比が1)となるものを見つける手法である。これは、一種のモンテカルロ法とも位置付けされよう。未知数乃至は未知数ベクトルの振り方に直交表(直交配列とよばれたりもする)を用いれば実験計画法の名が冠せられる。パラメータの振り方に何らか規則があれば(乱数発生も一つの規則である)、原始的な試行錯誤法(トライアンドエラー法)であっても、統計的アプローチ、代数的アプローチから無縁ではあり得ない。この意味で、どんな試行錯誤法(トライアンドエラー法)でも上記最小二乗法あるいは一般逆行列解法の俎上若しくは延長線上に乗っても不思議ではない。
【0031】
しかしながら、本発明では、上記の実験計画法における直交表を用いる試行錯誤法(トライアンドエラー法)についても言及する。これは、所謂実験計画法自体、有用とされるものの、理論と呼ぶには、流動的で且つつかみ所のない側面があるためである(本発明の一様態として明確化しておく)。即ち、前記方程式系の一様態としての未知数個数過剰の連立方程式系(式(6)等)の解法として、実験計画手法の直交表を適用して、未知数パラメータ水準選定下において、該未知数パラメータの組合せを該直交表に割付け、割付けられた該未知数パラメータの組合せの各々毎に、該連立方程式に包含される制御因子や誤差因子や分散を含むパラメータ、又それらの組合せ関数を採りあげて感度解析法を実行するとともに未知数決定方法に従って、機関絶対減衰係数および機関相対減衰係数を決定することを特徴とする。
【0032】
本発明は、エンジン内の減衰を絶対減衰(絶対減衰係数Cabs)および相対減衰(相対減衰係数Crel)に分離し、当該の二種類の減衰係数を評価する上で、複数個の共振点実測データを有効に使用するものである。
本発明によれば、実機に即した絶対減衰(絶対減衰係数)および相対減衰(相対減衰係数)が算出可能となるため、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、エンジンの運転過渡軌跡に関してのねじれ振動応答の把握も高精度で可能となる。
【0033】
次に、第2の発明は、前記第1の方法発明を実施するため装置発明に関し、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析装置であって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段と、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段と、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段と、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段と、を備えたことを特徴とする。
【0034】
かかる装置発明によれば、前記方法発明で説明した作用と同様に、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になる。
【0035】
さらに、第3の発明は、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段、該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段、該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段を有することを特徴とする。
【0036】
かかるプログラム発明によれば、前記方法発明および装置発明で説明した作用と同様に、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、本発明はコンピュータによる計算が必須であるため、かかるプログラムの発明によって、エンジン被駆動装置間の軸系装置の有用な設計手法となる。
【0037】
また、第4の発明は、前記方法発明によって解析された機関絶対減衰係数および機関相対減衰係数に基づいて設計されたエンジンと被駆動装置とを連結する動力伝達系を備えたことを特徴とし、具体的には、舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されるエンジン被駆動装置間の軸系装置を提供する。
かかる発明によれば、実機に即した絶対減衰(絶対減衰係数)および相対減衰(相対減衰係数)に基づいて動力伝達系の設計ができるため、信頼性、安全性の高い舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されるエンジン被駆動装置間の軸系装置を提供できる。
【発明の効果】
【0038】
本発明によれば、エンジンの絶対減衰並びに相対減衰エネルギーの見積もり精度をエンジンの実際に則して(実機の運転結果とより良く整合するように)向上させることができる。
したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。
また、エンジン軸系のねじり振動を正確に把握できるようになることは、取りも直さず、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることにもなる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与することが可能となる。
さらに、本発明によれば、余裕度(安全率)を正確に仕様に反映することができるため、軸系トラブル解析にも有効な手立てともなる。
また、本発明により設計製作されたエンジンと被駆動装置を連結する動力伝達軸系は、精度良い減衰係数に基づいて設計されるため、安全性、信頼性が向上する。
【発明を実施するための最良の形態】
【0039】
以下に本発明について図面を参照して説明する。但しこの実施の形態として記載されている部品の構成、寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0040】
図1は、舶用ディーゼルエンジン1のクランク軸3と連結されたプロペラシャフト5と該プロペラシャフト5の先端に取り付けられたプロペラ7を示している。該ディーゼルエンジンのクランク軸系と捩り振動作用による各部減衰は、次の通りである。
(1)の部分は、ピストン等の往復運動部の摺動による減衰、およびクランクピン軸受けによる減衰を示し、絶対減衰という。バネ・マス振動モデルの節点(シリンダ中心)の捩れ角速度に対する減衰として与える。
(2)の部分は、主軸受けによる減衰を示し、相対減衰という。バネ・マス振動モデルの主軸受けを挟む節点の相対捩れ角速度に対する減衰として与える。
(3)の部分は、プロペラ減衰を示し、プロペラ減衰(被駆動装置・軸系上の付属物減衰)という。バネ・マス振動モデルのプロペラの回転抵抗をその節点の捩れ角速度に対する減衰として与える。
【0041】
図2は エンジンクランク軸系のねじり振動解析のためのモデル例である。ねじり振動解析では一般に、軸系の前方(図2においては紙面左方)の機関自由端から後方(図2においては紙面右方)の被駆動装置側までに、節点を有限個設け当該節点に慣性質量を集中させ、慣性質量間はねじりバネで連結されるモデルを作成する。
【0042】
図2の例では節点1に最前方シリンダ(クランクスロー)より自由端側部分の慣性質量がまとめられている。節点2から(m+1)即ちcyl.1からcyl.mの節点に各シリンダ(クランクスロー)の慣性質量がまとめられている。L型エンジンならばm筒、V型エンジンならば2m筒の場合を示している。
後方最終端の節点nには被駆動装置(プロペラ)の慣性質量が置かれている。被駆動装置を複数節点に振り分けてもよい(例えば交流発電機を発電機本体と励磁機に分けてもよい)。
また、cyl.mの節点と後方最終端の節点nの間にはギア列、はずみ車部、継手・ダンパー部、中間軸部等を慣性質量として適宜与えてもよい。
【0043】
図2の例において、cyl.1からcyl.mの部分(節点2からm+1の部分)には、各シリンダ(クランクスロー)の軸受減衰が各シリンダ共通の絶対減衰係数Cabsを以って作用していることを示している。また、隣合う各シリンダ(クランクスロー)間には軸ヒステリス減衰が相対減衰係数Crelを以って作用している。節点nの被駆動装置(プロペラ)では起振エネルギーが吸収される。当該吸収エネルギーは絶対ふれ角に応じて吸収される絶対減衰エネルギーであり、プロペラの絶対減衰係数Cprをもって算定される。
【0044】
起振エネルギーと吸収(減衰)エネルギーの平衡を説明する前に、図4の振動モードについて説明する。
図4はねじり振動固有モード計算結果例を示している。該例においては二つの固有モード、即ちI節とII節の振動モードが示されている。I節モードではエンジンと被駆動装置(プロペラ)を連結する中間に節(振れ角0の点)が一つ存在する。II節モードではエンジン内クランク軸部の中間と被駆動装置(プロペラ)の極近傍の二箇所に節が存在している。勿論、II節モードの固有振動数の方がI節モードの固有振動数より高い。また、各固有振動数をエンジンの共振(危険)運転回転数で除したものを次数(一般に2サイクルエンジンでは整数であり4サイクルエンジンでは0.5の整数倍の数値である)とよんでいる。尚、エンジン・軸系によってはIII節以上の固有モードを検討する必要のある場合もある。
【0045】
図4のモード図に書き込まれてはいないが、節点iの慣性質量をIi,基準位置(一般に前端とする) ふれ角をθLとする。また、節点iにおける振れ角をθLβi とする(ここにβiは節点iのモード比である)。さらに、取り上げる対象の共振角振動数は ω とする。このとき、モード質量Ieが次式
により定義され、軸系の総減衰エネルギーは
総減衰エネルギー = 2ζ・π・ω2・Ie ・θL 2 (9)
である。ここに、ζは共振倍率Meの逆数の0.5倍となる所謂減衰比である。
【0046】
ねじり振動の持続共振状態においては起振エネルギー と軸系減衰エネルギーがバランスする。 ねじり振動計算上、起振エネルギーは高調波次数のトルクAkと共振モードのβj(J =1 〜m) の分布と着火間隔・着火順序とによってもとまるベクトルサム θL ・|Σj=2βj|により計算されるが、共振点の計測結果が知れているときは、式(9)により、当該起振エネルギーを算定せずとも総減衰エネルギーとして把握することもできる。
何故なら、モデル化の段階でIi は既知、βjiは固有モード解析段階で既知であり、式Ie(9)によりも知れる。一方、角振動数ω の共振時計測により、θLも計測され、減衰比ζも所謂「半値幅ルール(図3参照)」を用いて把握できるためである。
【0047】
図2、4のモデルに則して、総減衰エネルギーは式(10)のようになる。
したがって、式(9)および(10)から次式を得る。
【0048】
式(11)の右辺第1項はクランク絶対減衰に、第2項はクランク相対減衰に、第3項は被駆動装置(プロペラ)絶対減衰に関わる項である。前述のように、Cprは公知もしくは評価可能であり、式(11)は未知変数CabsおよびCrelのみに関する方程式となる。CabsおよびCrelをそれぞれ改めてAおよびBとかけば一つの共振モード・共振振動数の組に対して、一つの方程式(12) が得られ
a1A+b1B=c1 (12)
の形を得る。もう一つの共振モード・共振振動数の組に対して、同様に方程式(11) を得れば
a2A+b2B=c2 (13)
式(12)および(13)を連立させ、2元連立1次方程式として解けば定数としての解AおよびBを得る。
従来、試行錯誤的に設定されていた機関の減衰係数を実機の実際に則したものとして求めることが可能となる。
【0049】
図5に示すように、一般に、共振モード・共振振動数の組は多数存在する。I節モードでも次数によって複数の共振点が存在する。このため、未知定数AおよびBに対して3個以上の組を取りたいときは、最小二乗法の手法を取り入れればよい。例えば、3個の共振点より定数AおよびBに関する3個の連立方程式
を採用した場合、誤差関数 f として例えば、
f= (a1A+b1B−c1)2+(a2A+b2B−c22)2+(a3A+b3B−c3)2 (15)
のように置けば、fはA,Bに関する正値二次形式であり、fのAによる偏微分を取り0と置くこととfのBによる偏微分を取り0と置くこととにより、AおよびBに関する2元連立1次方程式に帰着可能となるから、最小二乗近似の意味においてAおよびBについて解くことができる。
【0050】
上記の式(14)の場合は未知数に対して方程式の数が過剰に存在する場合であるが、未知数の数に対して方程式の数が不足場合であっても最小二乗法による解法は成立する。例えば、上記の式(14)が単に
a1A+b1B=c1 (16)
のみの一方程式となっても、
式(15)の誤差関数fの右辺を第1項のみを採り
f=(a1A+b1B−c1)2 (17)
とすれば、AおよびBに関する2元連立1次方程式に帰着可能となるからである。
【0051】
以上のように式(14)の3個の連立方程式は最小二乗法の手法を用いて解くこともでき、絶対減衰係数Aおよび相対減衰係数Bに関する連立方程式の数に過不足があっても最小二乗法の手法により解くことが可能であり、かつ、方程式の数と未知数の数が一致しない場合でも、減衰係数を求めることができる。
そして、絶対減衰係数と相対減衰係数とが明確に峻別され、実機に則したものとして求めることが可能となる。したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。また、エンジン軸系のねじり振動を正確に把握できるようになるため、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることができる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与する。
【0052】
次に、式(14)の3個の連立方程式は一般逆行列の手法を用いて解くことについて説明する。
絶対減衰係数Aおよび相対減衰係数Bに関する連立方程式の数に過不足があっても一般逆行列の手法により解くことが可能である。この一般逆行列の手法も、方程式の数と未知数の数が一致しない場合でも適用可能な、より一般化された減衰係数の求め方である。
一般逆行列ついて簡単に説明すると、行列表示の連立方程式
Dx=b
において、D が正方(行の数と列の数が一致)行列でない、一般のm行n列の場合でも未知数ベクトルとしてのxを
x=D−b
のように与えることを可能とする行列 D− のことを指している。行列 D− には最小ノルム型一般逆行列、最小誤差型一般逆行列、反射型一般逆行列および当該三者の性質を兼ね備えるMoore−Penrose型一般逆行列がある。
それぞれ、高次元空間の部分空間への射影子としての意味付けを与えることもでき、x=D−b は最小二乗法とは別角度から見た連立方程式解法にもなる。
尚、m行n列のDに対してn行m列の一般逆行列D− はDD− D =D を可能とするものと定義される。
【0053】
このように最小二乗法によっても、一般逆行列を用いても、絶対減衰係数と相対減衰係数とが明確に峻別され、実機に則したものとして求めることが可能となる。したがって、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。また、エンジン軸系のねじり振動を正確に把握できるようになるため、エンジンや船体・エンジン建屋への高次振動の予測・評価技術を向上させ、エンジンプラントの信頼性を高めることにもなる。さらに、環境保護・省エネルギーのための高度なエンジン開発に必須である限界設計に寄与する。
【0054】
次に、絶対減衰係数Aおよび相対減衰係数Bを定数として捉えたが、そのように限定しなくてもよいことをまず最小二乗法の例で示す。
例えば、AおよびBをエンジン回転数即ち角振動数ωの関数(ここでは簡単のため1次関数)として、
A = p+ q ω (18)
B = r+ s ω (19)
と置く。ここで、p ,q ,r , および s が定数であり、AおよびBはωの1次関数となる。
【0055】
いま、共振点計測が3点の式(14)は
a1(p+ q ω1)+b1(r + s ω1) =c1
a2(p+ q ω2)+b2(r + s ω2) =c2 (20)
a3(p+ q ω3)+b3(r + s ω3) =c3
の形となる。
【0056】
上式(20)にてp ,q ,r , およびs以外の変数は計算・実測から既知となるから、上式(20)は未知定数p ,q ,r , および s の4元の連立1次方程式となる。未知数の数に比べ方程式の数は不足するが、上述のように最小二乗法を用いて、p ,q ,r , および s は求めることができることが分かる。勿論、計測点を4点以上としてもよい。
【0057】
この未知定数p ,q ,r , および s の4元の連立1次方程式には、また、前述の一般逆行列の手法が適用できることにもなる。絶対減衰係数Aおよび相対減衰係数Bを一定の定数とせず、角振動数ωの関数として捉えようとする際においても、最小二乗法或いは一般逆行列の手法を用いて絶対減衰係数および相対減衰係数を実機に則して把握することができる。
【0058】
更にまた、式(18)、(19)における1次関数は2次以上の多項式関数であってもよいし、有限の直交関数近似式や内外挿補間式であってもよい。エンジン軸系を含む構造物の減衰を絶対減衰と相対減衰に峻別し、それぞれを、複数の共振応答実測結果と対応させ評価させる手法を、本発明は明示している。
【0059】
尚、本発明の最も簡素な適用例に関して補足する。絶対減衰係数Aおよび相対減衰係数Bが定数であって、それらに関する連立方程式の数は過不足なく二つである場合である。2個の共振点より定数AおよびBに関する2個の連立方程式
a1A +b1 B=c1
a2A+b2B=c2 (21)
を採用する場合であり、例えば、図4に示されたように、エンジン・プロペラ軸系のI節モードより計測共振点を1個採り、もう一つの計測共振点をII節モードより採る。ここで、それぞれが上式(21)の第1式および第2式に対応する。
【0060】
I節モードにおいては、クランク軸部分は全体に略一様のねじれ振れ角を以って振動していて、各シリンダ(クランクスロー)間の相対ねじれは0と看做せる。従って、式(21)の第1式においてb1= 0 と看做せる。
【0061】
また、当該I節モードではプロペラの振れ振幅が顕著であり、明確なc1が把握でき、まず絶対減衰係数Aが簡単に求まる。このAを以って第2式に代入しBについて解けばよいが、この際、II節モードのプロペラ減衰は実質0(プロペラ振れ角が非常に小さい)故、c2の算定も簡単に求めることができる。
【0062】
次に、以上説明した機関絶対減衰係数および機関相対減衰係数を求める方法を実施するための動力伝達軸系のねじり振動解析装置10について、図6を参照して説明する。
この動力伝達軸系のねじり振動解析装置10は、ディーゼルエンジン1と被駆動装置のプロペラ7とを連結する動力伝達軸であるプロペラシャフト5のねじり振動解析装置であり、該エンジンからプロペラ7までを慣性質量・バネ系にモデル化する慣性質量・バネ系モデル化手段12を有し、図2のような解析モデルを作成する。
【0063】
さらに、起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する総エネルギー算出手段14を備え、該総エネルギー算出手段14においては、図3に示す実測の応答曲線結果から固有モード・固有振動数の共振点における半値幅に基づく減衰比ζを求め、さらにクランク軸3の前端での振れ角θLを検出し、さらに、節点iの慣性質量をIi等の設計値を入力して、式(9)に基づいて、共振点における総減衰エネルギーを算出する。
【0064】
さらに、前記算出した総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表して、絶対減衰係数および絶対減衰係数に関する複数個の方程式を複数個の共振点において作成する連立方程式作成手段16を備えている。
【0065】
すなわち、前記(9)式によって算出した総減衰エネルギーを、式(11)のように、
1項はクランク絶対減衰に、第2項はクランク相対減衰に、第3項は被駆動装置(プロペ
ラ)絶対減衰に関わる項として表す。CabsおよびCrelをそれぞれ改めてAおよびBとかけば一つの共振モード・共振振動数の組に対して、一つの方程式a1A +b1 B=c1が得られる。そして複数個の共振点において作成して式(12)、(13)のように連立方程式を作成する。
【0066】
さらに、前記複数の連立方程式を解いて、機関絶対減衰係数および機関相対減衰係数を求める連立方程式解法手段18を備えており、一般的に未知数(A、B)の数と方程式の数とが一致した場合の解法による求め方での算出、さらに、方程式の数と未知数の数が一致しない場合でも、最小二乗法或いは一般逆行列の手法を用いて絶対減衰係数および相対減衰係数を算出する。
【0067】
さらに、前記連立方程式解法手段18によって算出された絶対減衰係数および相対減衰係数を用いて、式(22)の多自由度系の運動方程式を解いて、図2に示したモデルの捩り振動を解析して、捩り振幅、応力等を算出する振動解析手段20を有している。
【0068】
(22)
Im:m番目の節点の慣性モーメント、θm:m番目の節点の捩れ角
fi:i番目のシリンダに加わるクランク軸回転方向接線力(i=1、2、…、(m−1))
【0069】
これを行列の形で書くと
と纏めることができる。
このとき、軸系の固有振動数・固有振動モードは、
Kβ=ω2Mβ
ω:固有振動数、 β:固有振動モード
なる固有値問題として解くことができる。
【0070】
連立方程式解法手段18によって算出された絶対減衰係数Cabsおよび相対減衰係数Crelが用いて、振動解析手段20によって運動方程式を解いて、エンジン軸系のねじり振動の運動を解析し、応力、振幅を評価して、設計に反映する。
【0071】
以上のような動力伝達軸系のねじり振動解析装置10によれば、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、該減衰係数を利用してさらに捩り運動解析をすることで、精度良い減衰係数に基づいて設計されるため、安全性、信頼性が向上する。また、過剰な余裕度を余儀なくされていた従来のエンジン軸系の合理化を可能とする。
【0072】
また、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、動力伝達軸系のねじり振動解析装置10を構成する、慣性質量・バネ系モデル化手段12と、総エネルギー算出手段14と、連立方程式作成手段16と、連立方程式解法手段18とを有して、絶対減衰係数および相対減衰係数を求めるプログラムを構成すれば、エンジン実機に則した絶対減衰エネルギーもしくは絶対減衰係数、および相対減衰エネルギーもしくは相対減衰係数を算出可能になり、軸系損傷トラブルや振動問題解決のための有力な手法となり、さらに、本発明はコンピュータによる計算が必須であるため、かかるプログラムによって、または、かかるプログラムを記憶した記憶媒体をコンピュータに読み取らせることによって、エンジン被駆動装置間の軸系装置の有用な設計手法となる。
【0073】
上記までは、前記Cabs=A,Crel=Bに関しての連立方程式に帰着させ、前記最小二乗法あるいは前記一般逆行列解法をもって、A,Bにつき求解するものであった。一方、連立方程式を解く方法には、一般的に未知数ベクトルを、ベクトル列の収束極限として捉える方法もある。例えば、共役傾斜法、加速緩和法等が構造解析分野において、広く用いられている。
しかしながら、応用力学系の分野等の大規模解析における、長大行列を扱う訳でもないが、変分原理や仮想仕事の原理あるいは適正な収束アルゴリズムに則した数理公式に従い、繰返し算式を用いて解くことも可能である。
強いて言えば、最小二乗法や一般逆行列解法に繰返し算法(行列の級数展開手法の意味を含め)の意味付けをあたえることが可能であるから、上記共役傾斜法、加速緩和法等の繰返し算法一般も、最小二乗法や一般逆行列解法の一応用とも言うことができる。
【0074】
一方、連立方程式系を直接的に解かない別の方法が存在する。方程式系の各未知数を大きく振って、試行錯誤(トライアンドエラー)的に方程式の満たされる度合い(満足度)を評価して、最適な組合せにおける、未知数あるいは未知数ベクトルの答えとする手法である。ここで言う満足度とは、方程式系の中に含蓄される、パラメータ(制御因子や誤差因子であってもよいし、それらの分散であってもよいし、また、それらの組合せパラメータであってもよい)を評価基準とする、感度解析法であってもよい。モンテカルロ法も、試行錯誤の手間を厭わない種類の該試行錯誤手法の一つと見なしてもよい。
【0075】
試行錯誤(トライアンドエラー)法の端的な例は、方程式系の未知数に試しの数値を種種代入し、右辺と左辺の差がゼロあるいは右辺と左辺の比が1に近づくものを探査する手法である(これも一種の感度解析とみなすことができる)。解に近づくためには、挟み撃ちの手法を導入してもよい。高次元の場合は、領域を段階的に絞り込む手法であってよい。ここで留意すべきは、方程式系あるいは最適化目的関数が滑らかな連続関数でなくパラメータの離散関数であってもよい。
又、目的量の分散(S/N比はその逆数指標として位置付けられてもよい)の極小化(極大化)を感度解析指標としてもよい。
【0076】
上記該試行錯誤手法はまた所謂実験計画法(非特許文献、岩波書店、数学事典参照)の応用であってもよい。ここで言う実験計画法応用手法とは、試行錯誤の場合の数を節約するために、直交表(直交配列、同上非特許文献、岩波書店、数学事典参照)を応用するものである。直交配列乃至直交表とは、画像の表現におけるアダマール変換行列(正方行列)の部分の行あるいは列を採り上げ、当該正方行列次元には不足するものの、複数の直交基底からなる集合に対応している。つまり、あるn次元ベクトルを、nより小さい数の基底で精度よく近似させる算段でもあると理解してもよい。このような理解からは、実験計画法は、最近一般的になった、多重解像度分解やウェーブレット解析の延長からの位置付けが与えられても不思議はないが、この延長線上の数理工学あるいは工業上利用な確たる技術として纏ってはいない。
【0077】
その主たる理由は、従来、実験計画法とは多元方程式のトライアンドエラー解法であると割切る立場からの取組みが無く、却って最近の最適化数理や多変量解析の数理の流用をもって理論武装する傾向があるためとも考えられる。しかしながら、また一方、直交表の原理、ラテン方陣や半群理論等の理解は当業者間でも概して皮相的乃至希薄であり、実用的手法の面が強調されることが多い。本発明の観点は試行錯誤(トライアンドエラー)法並びに感度解析法との位置付けに立脚するので、不明瞭さはない。又、オーソライズされた或いはオーソライズされうる直交表に従ったパラメータ振りをするから実用性もある。
取分け、クランク軸系のねじり振動解析分野にあって、相対減衰係数、絶対減衰係数の同定問題に関する開示は見られない。即ち本発明における、最小二乗法あるいは一般逆行列を用いる、絶対減衰係数および相対減衰係数の同定手法と並行する好適な応用例を開示する。以降の更なる開示は、最小二乗法あるいは一般逆行列を用いる解法の一形態と見なせることは前記したが、当該開示は、実験計画法あるいは多変量解析手法との接点に位置する技術と見なしてもよい。ただし、当該開示は、実験計画法あるいは多変量解析手法等の統計学的な長々しい理論を繰返すものでもない。実際、当該開示において、実験計画法あるいは多変量解析手法等の統計学的な分野から援用する用語は、平均、分散、S/N比(シグナル・ノイズ比)、因子、水準、直交表等で十分事足りる。説明上必要となる該分野の専門用語が、現れた場合もしくは、都度言及するものとする。
【0078】
当該開示を示す理由は、次の点にある。即ち、未知数の数に過不足のある数の連立方程式系が、得られたとき、最小二乗法あるいは一般逆行列を用いて、絶対減衰係数および相対減衰係数の同定が有効に実施されるにせよ、個々の方程式は共振振幅点に対応して得られるものであるから、計測振幅値あるいは半値幅の計測誤差の影響が、得られた個々の方程式に残留してしまう。斯かる計測誤差の影響を排除するには、例えば、最小二乗法あるいは一般逆行列解法の観点からは、計測点数あるいは、行列の行数もしくは列数を大きくする必要性が生じる。場合により、共振振幅点の重複を含め、計測回数を増やすことも考えられる。つまり、誤差の影響を排除する上では、計測点(計測共振点)の選定に計画性があってしかるべきである。この意味で、最小二乗法あるいは一般逆行列手法のみでは不自由なのである(裁量の余地が広すぎるきらいがある)。また、得られている方程式(具体的には各未知数に掛かる定数項)は、想定外の影響因子、例えば、ここでは、大気温度/湿度/エンジン油温/エンジン冷却水温度/運転負荷/排気温度等々の二次的因子の影響があって、求解が阻害される可能性がある。このようなときも、最小二乗法あるいは一般逆行列手法のみでは不自由である。こうした不自由さの緩和策を該開示は与えている。
【0079】
当該開示では、このため、実験計画法の直交表を利用する。相対減衰にnrel(個の)水準、絶対減衰にnabs (個の)水準の数値を振り、nrel x nabsの組合せを実験・計測回数(ここでは相対減衰/絶対減衰の組合せケース)として直交表の行を当てる。直交表の各列には計測一事象を対応させる。尚、当該表の二列分には絶対減衰係数および相対減衰係数の水準値(レベル)を明記する欄としてもよい。残る各列の各行には、当該列の計測結果に応じて(又当該行の)、感度評価値を埋めてもよいし、S/N比を充当してもよい。また、縦列の計測ケースの数が、慣用の該直交表の規格列数に不足していてもよく、データ不足列は、ダミー因子、たとえば、仮想的な計測時湿度(実質計測出力に影響なしと見なせる因子)の下での計測ケース欄として充当することもできる。
【0080】
慣用的なL18直交表を用いた場合を例にとり、説明する。L18直交表は図7に示すように、2水準の因子1個、3水準の因子7個つまり2×37 =4374通りの組合せの実験を18回の実験で済ますようなときに用いられ、18行8列の表である。各行に対して1種1個づつの計測データ値が元来対応する。各列は元来各因子のどの水準が割り当てられるかを示している。2水準の因子の列の場合、1が9回、2が9回現れ、また、3水準の因子の列の場合1が6回、2が6回、3が6回現れる。直交表では、1つの因子の水準が一つの値(整数)の行について抜き出すと他の因子については、その他の因子の各水準が同数回出現するようになっている。L18直交表は、18個のデータ値y1,y2,y3, ・・・・・・,y17,y18
が得られるとき、24個の未知数(データ平均値と2+3x7の都合24個)即ち、m,a1,a2,b1,b2,b3,c1,c2,c3,d1,d2,d3,e1,e2,e3,f1,f2,f3,g1,g2,g3,h1,h2,h3,の24個の未知数に対して18個の式並びに、上記の対称性(各因子水準の和が原点移動可能)より8個の式、合計26個の式の成立を意味している。具体的に方程式系を記述すれば、次の通りである。
(*1) y1=m+a1+b1+c1+d1+e1+f1+g1+h1
(*2) y2=m+a1+b1+c2+d2+e2+f2+g2+h2
(*3) y3=m+a1+b1+c3+d3+e3+f3+g3+h3
(*4) y4=m+a1+b2+c1+d1+e2+f2+g3+h3
(*5) y5=m+a1+b2+c2+d2+e3+f3+g1+h1
(*6) y6=m+a1+b2+c3+d3+e1+f1+g2+h2
(*7) y7=m+a1+b3+c1+d2+e1+f3+g2+h3
(*8) y8=m+a1+b3+c2++d3+e2+f1+g3+h1
(*9) y9=m+a1+b3+c3+d1+e3+f2+g1+h2
(*10) y10=m+a2+b1+c1+d3+e3+f2+g2+h1
(*11) y11=m+a2+b1+c2+d1+e1+f3+g3+h2
(*12) y12=m+a2+b1+c3+d2+e2+f1+g1+h3
(*13) y13=m+a2+b2+c1+d2+e3+f1+g3+h2
(*14) y14=m+a2+b2+c2+d3+e1+f2+g1+h3
(*15) y15=m+a2+b2+c3+d1+e2+f3+g2+h1
(*16) y16=m+a2+b3+c1+d3+e2+f3+g1+h2
(*17) y17=m+a2+b3+c2+d1+e3+f1+g2+h3
(*18) y18=m++b3+b3+c3+d2+e1+f2+g3+h1
(*19) a1+b3=0
(*20) b1+b2+b3=0
(*21) c1+c2+c3=0
(*22) d1+d2+d3=0
(*23) e1+e2+e3=0
(*24) f1+f2+f3=0
(*25) g1+g2+g3=0
(*26) h1+h2+h3=0
上記で式(*1)から式(*18)の辺々和をとれば, 式(*19)から式(*26)の対称性より右辺の和はmの18倍となりmが簡単に求まる。また、例えばb1に関し、(*1)から式(*3)および(*10)から式(*12)の辺々和をとれば, 式(*19)および式(*21)から式(*26)の対称性より右辺の和はb1の6倍となるのでb1も簡単に求まる。このようにして未知数24個が全て簡単に求まる。尚、式(*19)から式(*26)の各右辺は0としているが、既知の各平均値としても議論の一般性は損なわれない。この連立方程式解法は、数理的表現で言直すと、式(*1)から式(*18)を行列表示に改めて考えるとき、当該行列がアダマール行列(各成分が1若しくは−1からなり、異なる行または列のベクトル内積が0、あるいは、各成分が1若しくは1の複素n乗根すなわち1の高次の累乗根からなり、異なる行または列のベクトル内積が0となる行列)に対応させることが可能で、その一般逆行列が容易に与えられることと理解してよい。即ち、直交表を用いる実験計画法自体、一般逆行列解法の一種と見なしてもよいことを示した。
【0081】
直交表を用いる本発明の好適例は、上記の説明に止まるものではない。本発明の主眼は、前記相対減衰係数および絶対減衰係数係数の求解すなわち同定に、直交表を用いる実験計画法的な手法の開示を与えることにある。図7で直交表L18の例を示したように、直交表の各行各欄は因子の水準の組合せを示すものであった。前記相対減衰係数および絶対減衰係数係数の試みの値をそれぞれ、、nrel(個の)水準およびnabs (個の)水準で振ることを考えるとき、まず、nrel x nabsの組合せ数が、慣用直交表の行数と一致するようにする。因子としての相対減衰係数および絶対減衰係数係数の並べは、直交表の直交する2列のそれぞれに対応させる。つまり、相対減衰係数および絶対減衰係数係数の組合せの並べは直交表の前記対称性を満足している。この際、各行を右方に延長し、計測事象数に応じて列の欄を設けあるいは、延設して、各計測に対応して各升目に感度評価値あるいはS/N比若しくは両者を峻別できるように充当する。出来上がった表から、因子としての相対減衰係数および絶対減衰係数係数の各々に関しての要因効果評価が可能となり、因子の水準レベルを絞りこめる。ここで、絞り込みにあたっては、まず感度評価値が目標値に近づくようにしてから、S/N比が最適となるようにしてもよい。このように、方程式を直接解くことなく、未知数としての相対減衰係数および絶対減衰係数係数を絞り込み求解することが、本実施例により可能となった。しかも、温度、湿度、油温さらには離散的な誤差因子パラメータの介在を許容して計測に伴う誤差を抑制する手法を提供しているので、産業応用上の有用性を広げている。
【0082】
本実施例における感度評価について、更に説明しておく。旧来の実験計画手法において、感度とは、通常、ある因子に関して対象出力値のカーブ(通常直線近似)の傾きとして捉えることが一般的である(所謂、当該分野での動的機能法)が、本実施例での定義は更に広い。前記したように、連立方程式系を直接的に解かない別の方法であって、方程式系の各未知数を大きく振って、試行錯誤(トライアンドエラー)的に方程式の満たされる度合い(満足度)を評価して、最適な組合せにおける、未知数あるいは未知数ベクトルの答えとする手法に本実施例は該当している。ここで言う満足度とは、各未知数が振られたとき、方程式系(ここでは、方程式系と言うより、求解の対象システムにおける既知の関係式と呼んでもよい)の中に含蓄される、パラメータ(制御因子や誤差因子最適度合であってもよいし、それらが持込む目的値の分散最小化度合であってもよいし、また方程式左右両辺の一致度合でもよい)の最適度合を指す。
より具体的には、前記のように、絶対減衰係数Cabs=A、および相対減衰係数Crel=Bとして、A、およびBに関しての関係式としては、Aが6水準の6種、Bが3水準の3種ならば、6×3=18個の次式
aiA+biB=ci(ζi), (i = 1,2・・・,18) (23)
が成立する。ここで、係数ai,biは前記ねじり振動計算上,節数,次数毎に与えられている(式(12)の導出と同様)。前述での連立方程式解法の観点からは、ciは前記半値幅ルールに従って実験的に求められた減衰比ζi の関数として各ciは求められた。ここではA、Bがパラメータ振りによって与えてしまうので各定数項ciは、上式(23)の左辺の計算により計算される。実験値のζi (ζi実 とする)から各ciは求める操作の逆操作により(具体的には式(5)を用いる)、ここで計算された該各定数項ciから計算値のζi(ζi計 とする)が得られる。つまり、ζi実 とζi計 との一致度、即ち両者の比(これをここではβとおく)が1、dB換算で0に近いほど満足度は高いと評価してよい。本実施例では感度をこのようにとらえることが可能なことも示している。
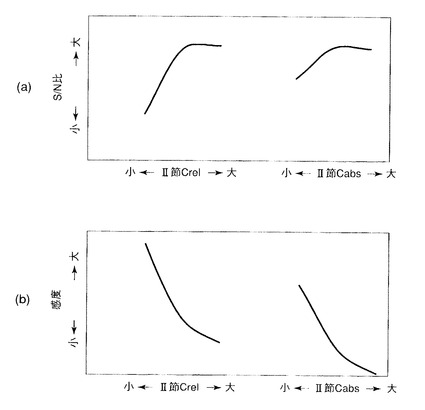
【0083】
上記の手順に従い、相対減衰係数因子および絶対減衰係数因子に対しての要因影響度評価を模式的に示したものが、図8a(S/N比)および8b(感度dB換算)である。感度βが1(当該dB値が0)に近づくように絶対減衰係数Cabs=A、および相対減衰係数Crel=Bの存在推定領域を絞り込みが可能となる。要すれば、Aの6水準の値およびBの3水準の値を狭めてとり、再度、要因影響度評価を行えばよい。
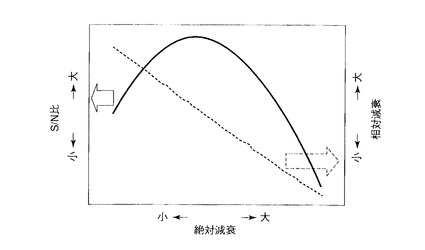
また、図9は、相対減衰係数因子および絶対減衰係数因子の範囲が絞り込まれた段階において、横軸に絶対減衰係数、縦軸に相対減衰係数およびS/N比をとり、要因効果を示したものである。相対減衰係数と絶対減衰係数の間には、想定の関係式(式11)から、線型の関係が確認される(図9中の点線)。一方S/N比は放物線状を成しており、極大値点が存在することが分かる。この極大値を与える、絶対減衰係数値と相対減衰係数値の組が、最適解になっている。
【産業上の利用可能性】
【0084】
本発明によれば、絶対減衰エネルギーもしくは絶対減衰係数、並びに相対減衰エネルギーもしくは相対減衰係数を、エンジン実機に則した値に算出可能として動力伝達系のねじり振動解析に反映させることができるため、エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法、解析装置への適用に対して有益である。
【図面の簡単な説明】
【0085】
【図1】ディーゼルエンジンのクランク軸系の構成と、捩り振動作用による各部減衰を示した説明図である。
【図2】本発明の実施形態に係る、エンジンと被駆動装置を連結する動力伝達軸系の解析モデルである。
【図3】本発明の実施形態に係る、軸系の共振点振幅応答線図例であり、減衰比を実測より求める方法を示す説明図である。
【図4】本発明の実施形態に係る、エンジンと被駆動装置を連結する動力伝達軸系の固有モードの例を示し、(a)がねじりI節振動モードであり、(b)がねじりII節振動モードである。
【図5】一般的なエンジンの共振モード・共振振動数の組の存在を示す説明図である。
【図6】本発明の実施形態に係る、動力伝達軸系のねじり振動解析装置の構成を示すブロック図である。
【図7】本発明の実施形態に係るL18直交表の例である。
【図8】(a)は本発明の実施形態に係るS/N比の例である。 (b)は本発明の実施形態に係る感度の例である。
【図9】本発明の実施形態に係る要因効果図の例である。
【符号の説明】
【0086】
1 ディーゼルエンジン
3 クランク軸
5 プロペラシャフト
7 プロペラ
10 ねじり振動解析装置
12 慣性質量・バネ系モデル化手段
14 総エネルギー算出手段
16 連立方程式算出手段
18 連立方程式解法手段
20 振動解析手段
【特許請求の範囲】
【請求項1】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法であって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化し、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成し、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする動力伝達系のねじり振動解析方法。
【請求項2】
ねじりI節固有振動モードから前記総減衰エネルギーを算出し、既知の被駆動装置・軸系上の付属物の減衰エネルギーと、前記ねじりI節固有振動モードにおける相対減衰エネルギーが無視可能であることに基づいて、前記機関絶対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項3】
ねじりII節固有振動モードから前記総減衰エネルギーを算出し、該総減衰エネルギーより前記機関絶対減衰係数および前記既知の被駆動装置・軸系上の付属物の減衰エネルギーを減算して機関相対減衰係数を求めることを特徴とする請求項2記載の動力伝達系のねじり振動解析方法。
【請求項4】
前記複数の連立方程式を最小二乗法により解いて、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項5】
前記複数の連立方程式を一般逆行列解法に解いて、機関絶対減衰係数および機相対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項6】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析装置であって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段と、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段と、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段と、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段と、を備えたことを特徴とする動力伝達軸系のねじり振動解析装置。
【請求項7】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段を有することを特徴とする動力伝達系のねじり振動解析プログラム。
【請求項8】
請求項1の方法によって解析された機関絶対減衰係数および機関相対減衰係数に基づいて設計されたエンジンと被駆動装置とを連結する動力伝達系を備えたことを特徴とするエンジン被駆動装置間の軸系装置。
【請求項9】
前記エンジンと被駆動装置とを連結する動力伝達系が、舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されることを特徴とする請求項8記載のエンジン被駆動装置間の軸系装置。
【請求項10】
前記複数の連立方程式を解くに際して、実験計画手法の直交表を適用して、相対減衰係数に対してnrel個の水準および絶対減衰係数に対してnabs 個の水準を選定し、nrelおよびnabsの積の数を前記直交表の行数と一致させ、該直交表の各行を、相対減衰係数の水準および絶対減衰係数の水準の組合せに対応させ、該直交表の行数の当該組合せの各々に対し、前記連立方程式に包含される制御因子や誤差因子や分散を含むパラメータ、又はそれらの組合せ関数を採りあげて感度解析法もしくは試行錯誤法を実行し、感度評価をS/N比評価に先行し所期の感度を達成するように相対減衰係数および絶対減衰係数の水準すなわち範囲を概略絞り込み、更に、S/N比の極大化を与える点を確定する手順に従って前記機関の絶対減衰係数および機関相対減衰係数を決定することを特徴とする請求項1の動力伝達系のねじり振動解析方法。
【請求項1】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析方法であって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化し、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定し、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成し、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする動力伝達系のねじり振動解析方法。
【請求項2】
ねじりI節固有振動モードから前記総減衰エネルギーを算出し、既知の被駆動装置・軸系上の付属物の減衰エネルギーと、前記ねじりI節固有振動モードにおける相対減衰エネルギーが無視可能であることに基づいて、前記機関絶対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項3】
ねじりII節固有振動モードから前記総減衰エネルギーを算出し、該総減衰エネルギーより前記機関絶対減衰係数および前記既知の被駆動装置・軸系上の付属物の減衰エネルギーを減算して機関相対減衰係数を求めることを特徴とする請求項2記載の動力伝達系のねじり振動解析方法。
【請求項4】
前記複数の連立方程式を最小二乗法により解いて、機関絶対減衰係数および機関相対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項5】
前記複数の連立方程式を一般逆行列解法に解いて、機関絶対減衰係数および機相対減衰係数を求めることを特徴とする請求項1記載の動力伝達系のねじり振動解析方法。
【請求項6】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析装置であって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段と、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段と、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段と、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段と、を備えたことを特徴とする動力伝達軸系のねじり振動解析装置。
【請求項7】
エンジンと被駆動装置を連結する動力伝達軸系のねじり振動解析をコンピュータ上で実現させるためのプログラムであって、
エンジンから被駆動装置までを慣性質量・バネ系にモデル化する手段、
起振エネルギーと減衰エネルギーがバランスする、各固有モード・固有振動数の共振点の複数の組における、起振エネルギーである総減衰エネルギーを実測減衰比と計算モード質量から算定する手段、
該総減衰エネルギーを機関側の絶対減衰エネルギー、相対減衰エネルギー並びに被駆動装置・軸系上の付属物の減衰エネルギーの和として表し、機関側の絶対減衰エネルギーを評価する機関絶対減衰係数および機関側の相対減衰エネルギーを評価する機関絶対減衰係数に関する複数個の方程式を複数個の共振点計測結果より作成する手段、
該複数の連立方程式を解くことで、機関絶対減衰係数および機関相対減衰係数を求める手段を有することを特徴とする動力伝達系のねじり振動解析プログラム。
【請求項8】
請求項1の方法によって解析された機関絶対減衰係数および機関相対減衰係数に基づいて設計されたエンジンと被駆動装置とを連結する動力伝達系を備えたことを特徴とするエンジン被駆動装置間の軸系装置。
【請求項9】
前記エンジンと被駆動装置とを連結する動力伝達系が、舶用ディーゼルエンジンのクランク軸とプロペラシャフトとプロペラによって構成されることを特徴とする請求項8記載のエンジン被駆動装置間の軸系装置。
【請求項10】
前記複数の連立方程式を解くに際して、実験計画手法の直交表を適用して、相対減衰係数に対してnrel個の水準および絶対減衰係数に対してnabs 個の水準を選定し、nrelおよびnabsの積の数を前記直交表の行数と一致させ、該直交表の各行を、相対減衰係数の水準および絶対減衰係数の水準の組合せに対応させ、該直交表の行数の当該組合せの各々に対し、前記連立方程式に包含される制御因子や誤差因子や分散を含むパラメータ、又はそれらの組合せ関数を採りあげて感度解析法もしくは試行錯誤法を実行し、感度評価をS/N比評価に先行し所期の感度を達成するように相対減衰係数および絶対減衰係数の水準すなわち範囲を概略絞り込み、更に、S/N比の極大化を与える点を確定する手順に従って前記機関の絶対減衰係数および機関相対減衰係数を決定することを特徴とする請求項1の動力伝達系のねじり振動解析方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−229445(P2009−229445A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−266982(P2008−266982)
【出願日】平成20年10月16日(2008.10.16)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年10月16日(2008.10.16)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]