
動力伝達系の試験装置とその制御方法
【課題】 動力源を含む動力伝達系に対し、適正なダイナモメータの発生トルクを与えて試験を行う。
【解決手段】 動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して出力軸にトルクを発生するダイナモメータと、該ダイナモメータの実速度ωを検出する速度検出手段4と、一慣性系をモデルとして前記ダイナモメータの速度を推定し、その推定速度ω^と実速度ωとの偏差に比例ゲインGを積算することにより、軸トルクを推定し、推定された軸トルクτS^に基づいて動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量JLを所望の慣性量Jxとなるように前記ダイナモメータの発生トルクτLを制御する制御手段5とを有する。
【解決手段】 動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して出力軸にトルクを発生するダイナモメータと、該ダイナモメータの実速度ωを検出する速度検出手段4と、一慣性系をモデルとして前記ダイナモメータの速度を推定し、その推定速度ω^と実速度ωとの偏差に比例ゲインGを積算することにより、軸トルクを推定し、推定された軸トルクτS^に基づいて動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量JLを所望の慣性量Jxとなるように前記ダイナモメータの発生トルクτLを制御する制御手段5とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力伝達系の試験装置とその制御方法に関する。
【背景技術】
【0002】
従来、動力伝達系の試験装置としては、例えば、特許文献1に開示されているものがある。
この試験装置は、車両の性能試験や耐久試験を室内で行うために動力伝達系に動力吸収手段として接続されるダイナモメータを備え、該ダイナモメータの発生トルクを制御することにより、動力伝達系に、実際の車両と等価な慣性を負荷して、実車走行を模擬した試験を可能としている。
【特許文献1】特許第3158461号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1に示す試験装置においては、ダイナモメータの発生トルクを制御するために、ダイナモメータの速度を検出し、その速度の微分値を計算することにより、ダイナモメータの加速度を求めている。このため、得られるダイナモメータの加速度値にノイズが発生しやすく高精度にダイナモメータの発生トルクを制御することが困難であった。
【0004】
また、ダイナモメータの速度検出をエンコーダやレゾルバのような位置検出手段によって行う場合には、ダイナモメータの加速度値を得るために、検出した位置情報を2階微分しなければならず、さらに精度が低下するという問題がある。
これらの場合に、検出期間を長くすれば、ある程度の精度・分解能の向上を図ることができるものの、検出に遅れを生ずることになるので、好ましくない。
また、ダイナモメータの出力軸にトルク変換器を取り付けることにより、発生トルクを直接的に検出することも考えられるが、軸の剛性等の影響によって過渡的に振動や誤差が発生する等の問題も考えられる。
【0005】
一方、試験対象となる装置、例えば、車両(供試体側)の慣性量が制御時に必要となる。この場合、エンジン、トランスミッション、ディファレンシャルギア等は慣性量が不明なことが多い。
また、トランスミッション等、ギアのかけかえをするものは、車両(供試体側)とダイナモメータとを接続する軸から見た車両(供試体側)の慣性量が変化するために、制御設定を切り替えることが必要となるが、制御設定のタイミングが難しく、また制御遅れが問題となる。
このように、車両(供試体側)の慣性量を正確に把握し、これに基づいてダイナモメータの発生トルクを制御することは困難である。
【0006】
本発明は、このような事情に鑑みてなされたもので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことを可能とする動力伝達系の試験装置とその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、動力源を含む動力伝達系の試験装置であって、 前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記速度検出手段で検出された実速度から高周波成分を除去するフィルタ手段1と、前記速度推定手段で推定された推定速度から高周波成分を除去するフィルタ手段2と、フィルタ手段2で高周波成分が除去された前記推定速度とフィルタ手段1で高周波成分が除去された前記実速度との偏差を算出する偏差算出手段と、偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記偏差の高調波成分を除去するフィルタ手段と、前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
【0008】
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記ダイナモメータに接続される実軸トルクと検出する軸トルク検出手段を備え、前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する駆動トルク予測手段とを備え、前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
【0009】
また本発明は、前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系に、互いに同一の特性で高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする。
また本発明は、前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする。
また本発明は、前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする。
【0010】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生させるか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生させる工程と、前記実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記速度検出手段で検出された実速度と前記速度推定手段で推定された推定速度とから高周波成分を除去する工程と、高周波成分が除去された前記推定速度と高周波成分が除去された前記実速度との偏差を算出する工程と、偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記算出された偏差の高調波成分を除去する工程と、前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0011】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記ダイナモメータに接続される実軸トルクと検出する工程を備え、前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0012】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する工程とを備え、前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0013】
また本発明は、前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系において、互いに同一の特性で高周波成分を除去する工程をさらに有することを特徴とする。
また本発明は、前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去する工程をさらに有することを特徴とする。
また本発明は、前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする。
【発明の効果】
【0014】
以上説明したように、本発明によれば、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、該ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定し、その推定速度と前記実速度との偏差にオブザーバゲインを積算することにより、前記軸又は前記出力軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有するので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0015】
すなわち、動力源とダイナモメータ、または動力源を模擬するダイナモメータ出力と動力伝達系とを接続する軸の軸トルクあるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0016】
また、前記ダイナモメータに接続される実軸トルクを検出する軸トルク検出手段を備え、前記制御手段は、前記推定された軸トルクと前記実軸トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0017】
また、前記動力伝達系の駆動トルクを推定する駆動トルク推定手段を備え、前記制御手段は、前記推定された軸トルクと前記推定された駆動トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、概略の駆動トルクを用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0018】
また、前記制御手段は、前記推定された軸トルクのリップルを低減するローパスフィルタを備えるので、電気慣性制御の応答を下げることなく、推定された軸トルクのリップルを抑えることができるという利便性が有る。また、駆動トルクまたは軸トルクが大きく変化する場合には、フィルタ時定数を小さくするか、あるいは無くすことにより、さらに電気慣性制御の応答を向上させることが可能となる。
【0019】
また、動力源を含む動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータを有する動力伝達系の試験装置の制御方法であって、前記ダイナモメータの実速度を検出するとともに、一慣性系をモデルとして前記ダイナモメータの速度を推定し、検出された実速度と前記推定された推定速度との偏差にオブザーバゲインを積算することにより、前記軸又は前記出力軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0020】
すなわち、動力源とダイナモメータ、または動力源を模擬するダイナモメータ出力と動力伝達系とを接続する軸の軸トルク、あるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0021】
前記ダイナモメータに接続される実軸トルクを検出するとともに、前記推定された軸トルクと前記実軸トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するので、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0022】
前記動力伝達系の駆動トルクを推定するとともに、前記推定された軸トルクと前記推定された駆動トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するので、概略の駆動トルクを用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態を、図面を参照して詳細に説明する。
A.第1実施形態
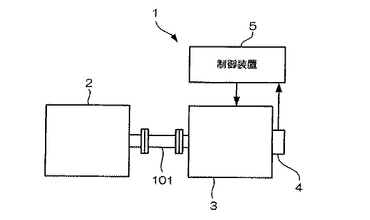
本発明の第1実施形態に係る動力伝達系の試験装置の構成を図1に示す。本発明の第1実施形態に係る動力伝達系の試験装置は、例えば、車両用エンジンの試験装置1であって、同図に示されるように、動力源であるエンジン2に軸101を介して接続されるダイナモメータ3と、ダイナモメータ3の実速度ωを検出する速度センサ4と、ダイナモメータ3の発生トルクを制御する制御装置5とを備えている。
【0024】
前記ダイナモメータ3は発電機/電動機であって、その発生トルクを制御することによって、エンジン2にかける負荷を調整することにより、実際に走行する車両の走行抵抗負荷と加減速時の車重相当の慣性負荷によってエンジン2に加えられるトルク負荷を模擬することができるようになっている。すなわち、ダイナモメータ3は、動力伝達系の動力源であるエンジン2の出力側、車両でいうと、タイヤ側にダイナモメータ3を設置して電気慣性制御する場合は、発電機として機能し、動力伝達系の駆動側、すなわち、エンジン2の代わりにダイナモメータ3を設置してダイナモメータ3の慣性量をエンジン2相当に見せかける電気慣性制御を行う場合は電動機として機能する。
また、前記速度センサ4は、例えば、タコジェネレータである。なお、パルスエンコーダ、レゾルバ等の角度検出器を用いて速度を検出する場合でも同様である。
【0025】
制御装置5は、供試体であるエンジン2とダイナモメータ3を接続する軸101に発生する軸トルクを推定する軸トルクオブザーバ6を備えている。この軸トルクオブザーバは、以下の考え方に基づいている。
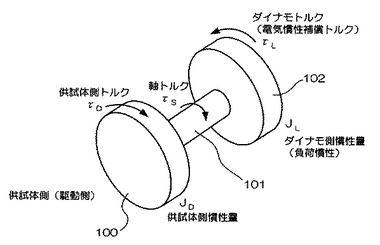
図2は、実車におけるエンジン、すなわち供試体側100と、試験装置のダイナモメータ側102とが軸101を介して接続された状態における各々の発生トルクと、慣性量との関係を図示している。
同図において、供試体(エンジン)側100の慣性量をJD、供試体側トルクをτD、軸101の軸トルクをτS、ダイナモメータ側の慣性量をJL、ダイナモメータ102のトルク、すなわちダイナモメータ3の発生トルクをτLとする。
【0026】
軸101からダイナモメータ102側を見た場合におけるダイナモメータ3の加速度αmは、
【0027】
【数1】

【0028】
となる。
また、ダイナモメータ3の慣性量が電気慣性制御における目標値Jxとなったときのダイナモメータ3の加速度αm’は、
【0029】
【数2】
【0030】
となる。
ダイナモメータ3によって車両の慣性を模擬するには、条件αm=αm’が成立すればよい。そこで、αm=αm’を条件として、上記式(1),(2)から加速度を消去すると、
【0031】
【数3】
【0032】
となり、軸トルクτSを知ることができれば、上記式(3)によってダイナモメータ3の発生トルクτLを制御することが可能となることがわかる。
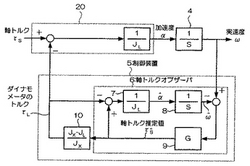
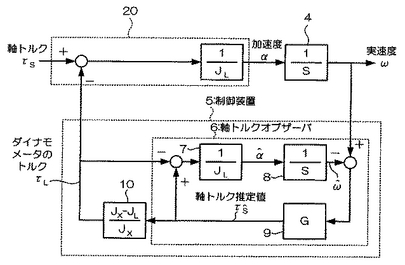
次に、本発明の第1実施形態に係る動力伝達系の試験装置における軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図3に示す。
同図において、20は、ダイナモメータ3を含む試験装置の機械装置部分(慣性)である。
電気慣性制御を行う制御装置5は、軸トルクオブザーバ6と、ダイナモメータトルク指令値を演算するトルク指令値演算部10とを有している。
【0033】
本第1実施形態においては、軸トルクオブザーバ6は、加速度推定部7と、速度推定部8と、軸トルク推定部9とを有している。
加速度推定部7は、軸トルクτSに対してダイナモメータ3のトルクτLが変動したときのダイナモメータ3の加速度を推定する部分であって、一慣性系をモデルとしている。
【0034】
速度推定部8は、軸トルクτSに対してダイナモメータ3のトルクτLが変動したときのダイナモメータ3の速度を推定する部分であって、一慣性系をモデルとしている。
また、軸トルク推定部9は、比例要素のみからなるオブザーバゲインGにより構成されている。その結果、この軸トルクオブザーバ6は最小次元オブザーバとなっている。
【0035】
また、加速度推定部7は、前記ダイナモメータ3と等価な対象を表す一慣性系モデルであり、ダイナモメータ3の慣性量の目標値Jx及び実際の慣性量JLに基づいて算出されたダイナモメータ3のトルクτLと推定された軸トルクτS^(図3等の中において、ωまたはτSの上に「^」を付した推定値を示す記号を、文章中では便宜上、ωまたはτSの右側に「^」を付すことにより示すことにする。)との偏差を入力することにより、ダイナモメータ3の推定加速度α^を出力することができるようになっている。
【0036】
さらに、速度推定部8は、加速推定部7により推定された推定加速度α^を積分演算することにより推定速度ω^を出力することができるようになっている。
また、トルク推定部9には、上記のようにして得られたダイナモメータ3の推定速度ω^に、前記速度センサ4により検出されたダイナモメータ3の実速度ωを負帰還することによって得られた速度偏差が入力され、軸トルク推定値τS^が出力されるようになっている。
【0037】
上記構成において、ダイナモメータ3は、直結されているエンジン2から軸101を介して軸トルクτSを供給されるとともに、制御装置5からダイナモメータ3の発生トルク指令τLを入力される。
ダイナモメータ3は、慣性量JLを備える一慣性系と考えられ、該一慣性系に軸トルクτSと発生トルク指令τLとが入力され、速度センサ4によって検出された実速度ωが出力される。
【0038】
また、制御装置5は、軸トルクオブザーバ6により推定された軸トルク推定値τS^に基づいて、上記式(3)によりダイナモメータ3の発生トルクτLを指令指令値演算部10より出力する。指令値演算部10からの出力は、軸トルクオブザーバ6に戻されるようになっている。
【0039】
図3において、軸トルクオブザーバ6内の軸トルク推定部9により、軸トルク推定値τS^が得られると、軸トルク推定値τS^と、指令値演算部10により演算されたダイナモメータ3の発生トルクτLとの偏差が加速度推定部7に入力される。
加速度推定部7では、次式により、推定加速度α^を求める。
【0040】
【数4】
【0041】
上式(4)で求められた推定加速度α^は、速度推定部8に入力され、次式により推定加速度α^を積分することにより、推定速度ω^を得る。
【0042】
【数5】
【0043】
次いで、速度センサ4により検出されたダイナモメータの実速度ωと速度推定部8により推定された推定速度ω^との偏差が軸トルク推定部9に入力される。
軸トルク推定部9では、次式により軸トルク推定値τS^を求める。
【0044】
【数6】
【0045】
ここで、Gはオブザーバゲインであり、例えば、比例ゲインである。尚、オブザーバゲインGは、比例ゲインに限らず、比例要素、積分要素、あるいは微分要素を組み合せたものであってもよい。
軸トルク推定部9で求められた軸トルク推定値τS^は、指令値演算部10に入力され、指令値演算部10は次式によりダイナモメータ3の発生トルクτLを求める。
【0046】
【数7】
【0047】
指令値演算部10は、上式(7)により求めた発生トルクτLをトルク指令値τLとして機械装置部分20内のダイナモメータ3に入力する。
なお、ダイナモメータ3からは、軸トルクτSと指令値演算部10により算出されたトルク指令値τLの偏差に基づいて次式により得られる加速度αが出力される。
【0048】
【数8】
【0049】
ダイナモメータ3から出力された加速度は、速度センサ4により入力され、速度センサ4は、次式により実速度ωを求める。
【0050】
【数9】
【0051】
以上のようにして、制御装置5によりダイナモメータ3の発生トルクを制御することにより、ダイナモメータ3の慣性量JLを制御設定値である目標値Jxになるように制御することができる。
尚、以上の説明では、ダイナモメータ3を動力伝達系の出力側(動力源であるエンジン2の出力側)、すなわち、車両でいうと、タイヤ側にダイナモメータ3を設置して電気慣性制御する場合について述べたが、これに限らず動力伝達系の駆動側に適用する場合、すなわち、車両でいうと、エンジン2の代わりにダイナモメータ3を設置してダイナモメータ3の慣性量をエンジン2相当に見せかける電気慣性制御を行う場合も同様である。
【0052】
このように構成された本第1実施形態に係る車両エンジン2の試験装置1によれば、ダイナモメータの実速度を検出するとともに、一慣性系をモデルとして前記ダイナモメータの速度を推定し、検出された実速度と前記推定された推定速度との偏差に比例ゲインを積算することにより、前記軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0053】
すなわち、動力源とダイナモメータとを接続する軸の軸トルク、あるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0054】
B.第2実施形態
次に、本発明の第2実施形態について説明する。
上述した電気慣性制御の応答には、軸トルクオブザーバ6のトルク推定の遅れにより限界がある。軸トルクオブザーバ6の補償器のゲイン(例えば、比例ゲインG)を上げることで、応答を改善できるが、トルク推定のリップルも大きくなり、軸のねじり共振周波数と一致して、大きな軸トルクの変動が継続的に発生する。本第2実施形態では、軸トルクオブザーバ6のゲインを上げることなく、電気慣性制御の応答を高速にするものである。
【0055】
本発明の第2実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図4に示す。なお、図1または図3に対応する部分には同一の符号を付けて説明を省略する。
同図において、30は、エンジン2の回転速度を変速するトランスミッションであり、エンジン2の回転は、一旦、該トランスミッション30を介して、軸101に伝達される。軸101には、トルク計31が設けられており、軸101の軸トルクτSを、制御装置5における軸トルクオブザーバ6の軸トルク推定部9の出力である、推定された軸トルクτS^に加算されるよう正帰還する。
【0056】
また、角度検出器32は、ダイナモメータ3の軸角度θを検出するレゾルバやエンコーダからなり、該ダイナモメータ3の角度θを微分器33へ供給する。微分器33は、角度θからダイナモメータ3の回転速度ωmを算出し、制御装置5における軸トルクオブザーバ6に供給される。すなわち、トルク推定部9には、ダイナモメータ3の推定速度ω^に、ダイナモメータ3の回転速度ωmを負帰還することによって得られた速度偏差が入力され、軸トルク推定値τS^が出力されるようになっている。
また、指令値演算部10からの出力は、軸トルクオブザーバ6に戻されるとともに、ダイナモメータ3にダイナモトルク指令τ*として供給されるようになっている。
【0057】
上述した第2実施形態によれば、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバ6の推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバ6のゲインを上げることなく、高速にすることができる。
【0058】
C.第3実施形態
次に、本発明の第3実施形態について説明する。
本第3実施形態は、前述した第2実施形態と同様に、軸トルクオブザーバ6のゲインを上げることなく、電気慣性制御の応答を高速にするものである。
【0059】
本発明の第3実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図5に示す。なお、図4に対応する部分には同一の符号を付けて説明を省略する。
【0060】
同図において、40は、外部からの操作(例えば、アクセル操作)に応じて、エンジン2への燃料噴射量を調節するための調節器(キャリブレータ)である。エンジントルク演算部41は、上記外部操作からエンジントルク値を演算し、トルク伝達特性部42へ供給する。トルク伝達特性部42は、エンジントルク値からトルク伝達特性に基づいてトルク予想値を出力し、制御装置5における軸トルクオブザーバ6の軸トルク推定部9の出力である、推定された軸トルクτS^に加算されるよう正帰還する。
【0061】
上述した第3実施形態によれば、前述した第2実施形態と同様に、概略の駆動トルク(遅れや誤差があっても、軸トルクオブザーバ6が補うので問題ない)を用いて、軸トルクオブザーバ6の推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバ6のゲインを上げることなく、高速にすることができる。
【0062】
なお、上述した第2または第3実施形態においては、さらに、軸トルク推定部9の前段、または、速度推定部8の後段および微分器33の後段に、推定された軸トルクのリップルを低減するためのローパスフィルタを挿入するようにしてもよい。これにより、電気慣性制御の応答を下げることなく、推定された軸トルクのリップルを抑えることができる。また、駆動トルクまたは軸トルクが大きく変化する場合には、フィルタ時定数を小さくするか、あるいは無くすことにより、さらに電気慣性制御の応答を向上させることができる。
【図面の簡単な説明】
【0063】
【図1】この発明の第1実施形態に係るエンジンの試験装置の基本構成を示すブロック図。
【図2】供試体側と、試験装置のダイナモメータ側とが軸を介して接続された状態における各々の発生トルクと、慣性量との関係を示す説明図。
【図3】図1に示したエンジンの試験装置におけるトルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【図4】この発明の第2実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【図5】この発明の第3実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【符号の説明】
【0064】
1…試験装置 2…エンジン 3…ダイナモメータ 4…速度センサ(速度検出手段) 5…制御装置(制御手段) 6…軸トルクオブザーバ 10…指令値演算部 30…トランスミッション 31…トルク計(軸トルク検出手段) 32…角度検出器 33…微分器 40…調節器 41…エンジントルク演算部(駆動トルク推定手段) 42…トルク伝達特性部(駆動トルク推定手段)
【技術分野】
【0001】
本発明は、動力伝達系の試験装置とその制御方法に関する。
【背景技術】
【0002】
従来、動力伝達系の試験装置としては、例えば、特許文献1に開示されているものがある。
この試験装置は、車両の性能試験や耐久試験を室内で行うために動力伝達系に動力吸収手段として接続されるダイナモメータを備え、該ダイナモメータの発生トルクを制御することにより、動力伝達系に、実際の車両と等価な慣性を負荷して、実車走行を模擬した試験を可能としている。
【特許文献1】特許第3158461号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1に示す試験装置においては、ダイナモメータの発生トルクを制御するために、ダイナモメータの速度を検出し、その速度の微分値を計算することにより、ダイナモメータの加速度を求めている。このため、得られるダイナモメータの加速度値にノイズが発生しやすく高精度にダイナモメータの発生トルクを制御することが困難であった。
【0004】
また、ダイナモメータの速度検出をエンコーダやレゾルバのような位置検出手段によって行う場合には、ダイナモメータの加速度値を得るために、検出した位置情報を2階微分しなければならず、さらに精度が低下するという問題がある。
これらの場合に、検出期間を長くすれば、ある程度の精度・分解能の向上を図ることができるものの、検出に遅れを生ずることになるので、好ましくない。
また、ダイナモメータの出力軸にトルク変換器を取り付けることにより、発生トルクを直接的に検出することも考えられるが、軸の剛性等の影響によって過渡的に振動や誤差が発生する等の問題も考えられる。
【0005】
一方、試験対象となる装置、例えば、車両(供試体側)の慣性量が制御時に必要となる。この場合、エンジン、トランスミッション、ディファレンシャルギア等は慣性量が不明なことが多い。
また、トランスミッション等、ギアのかけかえをするものは、車両(供試体側)とダイナモメータとを接続する軸から見た車両(供試体側)の慣性量が変化するために、制御設定を切り替えることが必要となるが、制御設定のタイミングが難しく、また制御遅れが問題となる。
このように、車両(供試体側)の慣性量を正確に把握し、これに基づいてダイナモメータの発生トルクを制御することは困難である。
【0006】
本発明は、このような事情に鑑みてなされたもので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことを可能とする動力伝達系の試験装置とその制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、動力源を含む動力伝達系の試験装置であって、 前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記速度検出手段で検出された実速度から高周波成分を除去するフィルタ手段1と、前記速度推定手段で推定された推定速度から高周波成分を除去するフィルタ手段2と、フィルタ手段2で高周波成分が除去された前記推定速度とフィルタ手段1で高周波成分が除去された前記実速度との偏差を算出する偏差算出手段と、偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記偏差の高調波成分を除去するフィルタ手段と、前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
【0008】
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記ダイナモメータに接続される実軸トルクと検出する軸トルク検出手段を備え、前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、前記推定速度と前記実速度との偏差を算出する偏差算出手段と、前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する駆動トルク予測手段とを備え、前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有することを特徴とする。
【0009】
また本発明は、前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系に、互いに同一の特性で高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする。
また本発明は、前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする。
また本発明は、前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする。
【0010】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生させるか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生させる工程と、前記実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記速度検出手段で検出された実速度と前記速度推定手段で推定された推定速度とから高周波成分を除去する工程と、高周波成分が除去された前記推定速度と高周波成分が除去された前記実速度との偏差を算出する工程と、偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記算出された偏差の高調波成分を除去する工程と、前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0011】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記ダイナモメータに接続される実軸トルクと検出する工程を備え、前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0012】
また本発明は、動力源を含む動力伝達系の試験方法であって、前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、前記ダイナモメータの実速度を検出する工程と、一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、前記推定速度と前記実速度との偏差を算出する工程と、前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する工程とを備え、前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程とを有することを特徴とする。
【0013】
また本発明は、前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系において、互いに同一の特性で高周波成分を除去する工程をさらに有することを特徴とする。
また本発明は、前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去する工程をさらに有することを特徴とする。
また本発明は、前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする。
【発明の効果】
【0014】
以上説明したように、本発明によれば、動力源を含む動力伝達系の試験装置であって、前記動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、該ダイナモメータの実速度を検出する速度検出手段と、一慣性系をモデルとして前記ダイナモメータの速度を推定し、その推定速度と前記実速度との偏差にオブザーバゲインを積算することにより、前記軸又は前記出力軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段とを有するので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0015】
すなわち、動力源とダイナモメータ、または動力源を模擬するダイナモメータ出力と動力伝達系とを接続する軸の軸トルクあるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0016】
また、前記ダイナモメータに接続される実軸トルクを検出する軸トルク検出手段を備え、前記制御手段は、前記推定された軸トルクと前記実軸トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0017】
また、前記動力伝達系の駆動トルクを推定する駆動トルク推定手段を備え、前記制御手段は、前記推定された軸トルクと前記推定された駆動トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、概略の駆動トルクを用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0018】
また、前記制御手段は、前記推定された軸トルクのリップルを低減するローパスフィルタを備えるので、電気慣性制御の応答を下げることなく、推定された軸トルクのリップルを抑えることができるという利便性が有る。また、駆動トルクまたは軸トルクが大きく変化する場合には、フィルタ時定数を小さくするか、あるいは無くすことにより、さらに電気慣性制御の応答を向上させることが可能となる。
【0019】
また、動力源を含む動力伝達系に軸を介して接続され該軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータを有する動力伝達系の試験装置の制御方法であって、前記ダイナモメータの実速度を検出するとともに、一慣性系をモデルとして前記ダイナモメータの速度を推定し、検出された実速度と前記推定された推定速度との偏差にオブザーバゲインを積算することにより、前記軸又は前記出力軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0020】
すなわち、動力源とダイナモメータ、または動力源を模擬するダイナモメータ出力と動力伝達系とを接続する軸の軸トルク、あるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0021】
前記ダイナモメータに接続される実軸トルクを検出するとともに、前記推定された軸トルクと前記実軸トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するので、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【0022】
前記動力伝達系の駆動トルクを推定するとともに、前記推定された軸トルクと前記推定された駆動トルクとに基づいて、前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するので、概略の駆動トルクを用いて、軸トルクオブザーバの推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバのゲインを上げることなく、高速にすることができるという利便性が有る。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態を、図面を参照して詳細に説明する。
A.第1実施形態
本発明の第1実施形態に係る動力伝達系の試験装置の構成を図1に示す。本発明の第1実施形態に係る動力伝達系の試験装置は、例えば、車両用エンジンの試験装置1であって、同図に示されるように、動力源であるエンジン2に軸101を介して接続されるダイナモメータ3と、ダイナモメータ3の実速度ωを検出する速度センサ4と、ダイナモメータ3の発生トルクを制御する制御装置5とを備えている。
【0024】
前記ダイナモメータ3は発電機/電動機であって、その発生トルクを制御することによって、エンジン2にかける負荷を調整することにより、実際に走行する車両の走行抵抗負荷と加減速時の車重相当の慣性負荷によってエンジン2に加えられるトルク負荷を模擬することができるようになっている。すなわち、ダイナモメータ3は、動力伝達系の動力源であるエンジン2の出力側、車両でいうと、タイヤ側にダイナモメータ3を設置して電気慣性制御する場合は、発電機として機能し、動力伝達系の駆動側、すなわち、エンジン2の代わりにダイナモメータ3を設置してダイナモメータ3の慣性量をエンジン2相当に見せかける電気慣性制御を行う場合は電動機として機能する。
また、前記速度センサ4は、例えば、タコジェネレータである。なお、パルスエンコーダ、レゾルバ等の角度検出器を用いて速度を検出する場合でも同様である。
【0025】
制御装置5は、供試体であるエンジン2とダイナモメータ3を接続する軸101に発生する軸トルクを推定する軸トルクオブザーバ6を備えている。この軸トルクオブザーバは、以下の考え方に基づいている。
図2は、実車におけるエンジン、すなわち供試体側100と、試験装置のダイナモメータ側102とが軸101を介して接続された状態における各々の発生トルクと、慣性量との関係を図示している。
同図において、供試体(エンジン)側100の慣性量をJD、供試体側トルクをτD、軸101の軸トルクをτS、ダイナモメータ側の慣性量をJL、ダイナモメータ102のトルク、すなわちダイナモメータ3の発生トルクをτLとする。
【0026】
軸101からダイナモメータ102側を見た場合におけるダイナモメータ3の加速度αmは、
【0027】
【数1】
【0028】
となる。
また、ダイナモメータ3の慣性量が電気慣性制御における目標値Jxとなったときのダイナモメータ3の加速度αm’は、
【0029】
【数2】
【0030】
となる。
ダイナモメータ3によって車両の慣性を模擬するには、条件αm=αm’が成立すればよい。そこで、αm=αm’を条件として、上記式(1),(2)から加速度を消去すると、
【0031】
【数3】
【0032】
となり、軸トルクτSを知ることができれば、上記式(3)によってダイナモメータ3の発生トルクτLを制御することが可能となることがわかる。
次に、本発明の第1実施形態に係る動力伝達系の試験装置における軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図3に示す。
同図において、20は、ダイナモメータ3を含む試験装置の機械装置部分(慣性)である。
電気慣性制御を行う制御装置5は、軸トルクオブザーバ6と、ダイナモメータトルク指令値を演算するトルク指令値演算部10とを有している。
【0033】
本第1実施形態においては、軸トルクオブザーバ6は、加速度推定部7と、速度推定部8と、軸トルク推定部9とを有している。
加速度推定部7は、軸トルクτSに対してダイナモメータ3のトルクτLが変動したときのダイナモメータ3の加速度を推定する部分であって、一慣性系をモデルとしている。
【0034】
速度推定部8は、軸トルクτSに対してダイナモメータ3のトルクτLが変動したときのダイナモメータ3の速度を推定する部分であって、一慣性系をモデルとしている。
また、軸トルク推定部9は、比例要素のみからなるオブザーバゲインGにより構成されている。その結果、この軸トルクオブザーバ6は最小次元オブザーバとなっている。
【0035】
また、加速度推定部7は、前記ダイナモメータ3と等価な対象を表す一慣性系モデルであり、ダイナモメータ3の慣性量の目標値Jx及び実際の慣性量JLに基づいて算出されたダイナモメータ3のトルクτLと推定された軸トルクτS^(図3等の中において、ωまたはτSの上に「^」を付した推定値を示す記号を、文章中では便宜上、ωまたはτSの右側に「^」を付すことにより示すことにする。)との偏差を入力することにより、ダイナモメータ3の推定加速度α^を出力することができるようになっている。
【0036】
さらに、速度推定部8は、加速推定部7により推定された推定加速度α^を積分演算することにより推定速度ω^を出力することができるようになっている。
また、トルク推定部9には、上記のようにして得られたダイナモメータ3の推定速度ω^に、前記速度センサ4により検出されたダイナモメータ3の実速度ωを負帰還することによって得られた速度偏差が入力され、軸トルク推定値τS^が出力されるようになっている。
【0037】
上記構成において、ダイナモメータ3は、直結されているエンジン2から軸101を介して軸トルクτSを供給されるとともに、制御装置5からダイナモメータ3の発生トルク指令τLを入力される。
ダイナモメータ3は、慣性量JLを備える一慣性系と考えられ、該一慣性系に軸トルクτSと発生トルク指令τLとが入力され、速度センサ4によって検出された実速度ωが出力される。
【0038】
また、制御装置5は、軸トルクオブザーバ6により推定された軸トルク推定値τS^に基づいて、上記式(3)によりダイナモメータ3の発生トルクτLを指令指令値演算部10より出力する。指令値演算部10からの出力は、軸トルクオブザーバ6に戻されるようになっている。
【0039】
図3において、軸トルクオブザーバ6内の軸トルク推定部9により、軸トルク推定値τS^が得られると、軸トルク推定値τS^と、指令値演算部10により演算されたダイナモメータ3の発生トルクτLとの偏差が加速度推定部7に入力される。
加速度推定部7では、次式により、推定加速度α^を求める。
【0040】
【数4】
【0041】
上式(4)で求められた推定加速度α^は、速度推定部8に入力され、次式により推定加速度α^を積分することにより、推定速度ω^を得る。
【0042】
【数5】
【0043】
次いで、速度センサ4により検出されたダイナモメータの実速度ωと速度推定部8により推定された推定速度ω^との偏差が軸トルク推定部9に入力される。
軸トルク推定部9では、次式により軸トルク推定値τS^を求める。
【0044】
【数6】
【0045】
ここで、Gはオブザーバゲインであり、例えば、比例ゲインである。尚、オブザーバゲインGは、比例ゲインに限らず、比例要素、積分要素、あるいは微分要素を組み合せたものであってもよい。
軸トルク推定部9で求められた軸トルク推定値τS^は、指令値演算部10に入力され、指令値演算部10は次式によりダイナモメータ3の発生トルクτLを求める。
【0046】
【数7】
【0047】
指令値演算部10は、上式(7)により求めた発生トルクτLをトルク指令値τLとして機械装置部分20内のダイナモメータ3に入力する。
なお、ダイナモメータ3からは、軸トルクτSと指令値演算部10により算出されたトルク指令値τLの偏差に基づいて次式により得られる加速度αが出力される。
【0048】
【数8】
【0049】
ダイナモメータ3から出力された加速度は、速度センサ4により入力され、速度センサ4は、次式により実速度ωを求める。
【0050】
【数9】
【0051】
以上のようにして、制御装置5によりダイナモメータ3の発生トルクを制御することにより、ダイナモメータ3の慣性量JLを制御設定値である目標値Jxになるように制御することができる。
尚、以上の説明では、ダイナモメータ3を動力伝達系の出力側(動力源であるエンジン2の出力側)、すなわち、車両でいうと、タイヤ側にダイナモメータ3を設置して電気慣性制御する場合について述べたが、これに限らず動力伝達系の駆動側に適用する場合、すなわち、車両でいうと、エンジン2の代わりにダイナモメータ3を設置してダイナモメータ3の慣性量をエンジン2相当に見せかける電気慣性制御を行う場合も同様である。
【0052】
このように構成された本第1実施形態に係る車両エンジン2の試験装置1によれば、ダイナモメータの実速度を検出するとともに、一慣性系をモデルとして前記ダイナモメータの速度を推定し、検出された実速度と前記推定された推定速度との偏差に比例ゲインを積算することにより、前記軸の軸トルクを推定し、該推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御するようにしたので、供試体側の慣性量が判らなくても、動力源を含む動力伝達系に対して、適正なダイナモメータの発生トルクを与えて試験を行うことが可能となる。
【0053】
すなわち、動力源とダイナモメータとを接続する軸の軸トルク、あるいはダイナモメータの加速度を用いることなく、ダイナモメータの慣性量と、設定慣性量のみに基づいてダイナモメータの発生トルクを制御することが可能となり、供試体である動力源の慣性量が判らなくても、動力伝達系のシミュレーションを適正に行うことができるという利便性が有る。
【0054】
B.第2実施形態
次に、本発明の第2実施形態について説明する。
上述した電気慣性制御の応答には、軸トルクオブザーバ6のトルク推定の遅れにより限界がある。軸トルクオブザーバ6の補償器のゲイン(例えば、比例ゲインG)を上げることで、応答を改善できるが、トルク推定のリップルも大きくなり、軸のねじり共振周波数と一致して、大きな軸トルクの変動が継続的に発生する。本第2実施形態では、軸トルクオブザーバ6のゲインを上げることなく、電気慣性制御の応答を高速にするものである。
【0055】
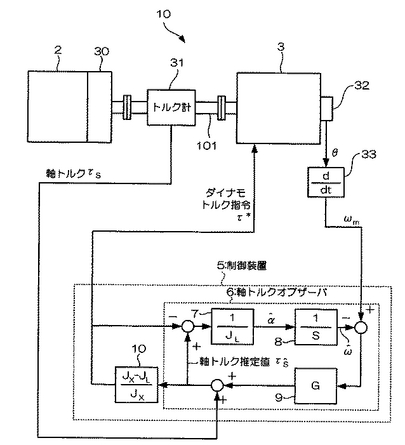
本発明の第2実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図4に示す。なお、図1または図3に対応する部分には同一の符号を付けて説明を省略する。
同図において、30は、エンジン2の回転速度を変速するトランスミッションであり、エンジン2の回転は、一旦、該トランスミッション30を介して、軸101に伝達される。軸101には、トルク計31が設けられており、軸101の軸トルクτSを、制御装置5における軸トルクオブザーバ6の軸トルク推定部9の出力である、推定された軸トルクτS^に加算されるよう正帰還する。
【0056】
また、角度検出器32は、ダイナモメータ3の軸角度θを検出するレゾルバやエンコーダからなり、該ダイナモメータ3の角度θを微分器33へ供給する。微分器33は、角度θからダイナモメータ3の回転速度ωmを算出し、制御装置5における軸トルクオブザーバ6に供給される。すなわち、トルク推定部9には、ダイナモメータ3の推定速度ω^に、ダイナモメータ3の回転速度ωmを負帰還することによって得られた速度偏差が入力され、軸トルク推定値τS^が出力されるようになっている。
また、指令値演算部10からの出力は、軸トルクオブザーバ6に戻されるとともに、ダイナモメータ3にダイナモトルク指令τ*として供給されるようになっている。
【0057】
上述した第2実施形態によれば、軸トルク(予想値または検出値)を用いて、軸トルクオブザーバ6の推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバ6のゲインを上げることなく、高速にすることができる。
【0058】
C.第3実施形態
次に、本発明の第3実施形態について説明する。
本第3実施形態は、前述した第2実施形態と同様に、軸トルクオブザーバ6のゲインを上げることなく、電気慣性制御の応答を高速にするものである。
【0059】
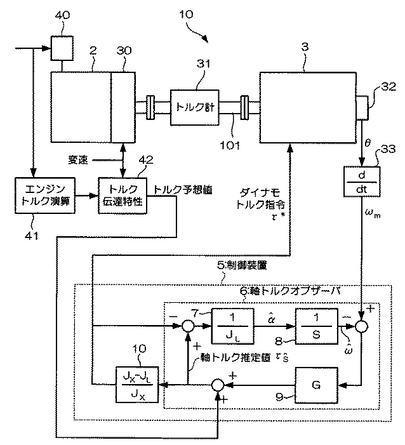
本発明の第3実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を図5に示す。なお、図4に対応する部分には同一の符号を付けて説明を省略する。
【0060】
同図において、40は、外部からの操作(例えば、アクセル操作)に応じて、エンジン2への燃料噴射量を調節するための調節器(キャリブレータ)である。エンジントルク演算部41は、上記外部操作からエンジントルク値を演算し、トルク伝達特性部42へ供給する。トルク伝達特性部42は、エンジントルク値からトルク伝達特性に基づいてトルク予想値を出力し、制御装置5における軸トルクオブザーバ6の軸トルク推定部9の出力である、推定された軸トルクτS^に加算されるよう正帰還する。
【0061】
上述した第3実施形態によれば、前述した第2実施形態と同様に、概略の駆動トルク(遅れや誤差があっても、軸トルクオブザーバ6が補うので問題ない)を用いて、軸トルクオブザーバ6の推定遅れを補償することによって、電気慣性制御の応答を、軸トルクオブザーバ6のゲインを上げることなく、高速にすることができる。
【0062】
なお、上述した第2または第3実施形態においては、さらに、軸トルク推定部9の前段、または、速度推定部8の後段および微分器33の後段に、推定された軸トルクのリップルを低減するためのローパスフィルタを挿入するようにしてもよい。これにより、電気慣性制御の応答を下げることなく、推定された軸トルクのリップルを抑えることができる。また、駆動トルクまたは軸トルクが大きく変化する場合には、フィルタ時定数を小さくするか、あるいは無くすことにより、さらに電気慣性制御の応答を向上させることができる。
【図面の簡単な説明】
【0063】
【図1】この発明の第1実施形態に係るエンジンの試験装置の基本構成を示すブロック図。
【図2】供試体側と、試験装置のダイナモメータ側とが軸を介して接続された状態における各々の発生トルクと、慣性量との関係を示す説明図。
【図3】図1に示したエンジンの試験装置におけるトルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【図4】この発明の第2実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【図5】この発明の第3実施形態に係る動力伝達系の試験装置の構成および軸トルクオブザーバを用いた電気慣性制御の制御系の基本構成を示すブロック図。
【符号の説明】
【0064】
1…試験装置 2…エンジン 3…ダイナモメータ 4…速度センサ(速度検出手段) 5…制御装置(制御手段) 6…軸トルクオブザーバ 10…指令値演算部 30…トランスミッション 31…トルク計(軸トルク検出手段) 32…角度検出器 33…微分器 40…調節器 41…エンジントルク演算部(駆動トルク推定手段) 42…トルク伝達特性部(駆動トルク推定手段)
【特許請求の範囲】
【請求項1】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記速度検出手段で検出された実速度から高周波成分を除去するフィルタ手段1と、
前記速度推定手段で推定された推定速度から高周波成分を除去するフィルタ手段2と、
フィルタ手段2で高周波成分が除去された前記推定速度とフィルタ手段1で高周波成分が除去された前記実速度との偏差を算出する偏差算出手段と、
偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする動力伝達系の試験装置。
【請求項2】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記偏差の高調波成分を除去するフィルタ手段と、
前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする動力伝達系の試験装置。
【請求項3】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記ダイナモメータに接続される実軸トルクと検出する軸トルク検出手段を備え、
前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と
を有することを特徴とする動力伝達系の試験装置。
【請求項4】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する駆動トルク予測手段とを備え、
前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と
を有することを特徴とする動力伝達系の試験装置。
【請求項5】
前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系に、互いに同一の特性で高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする請求項3または4いずれかに記載の動力伝達系の試験装置。
【請求項6】
前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする請求項3または4のいずれに記載の動力伝達系の試験装置。
【請求項7】
前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする請求項1、2、5、または6のいずれかに記載の動力伝達系の試験装置。
【請求項8】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生させるか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生させる工程と、
前記実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記速度検出手段で検出された実速度と前記速度推定手段で推定された推定速度とから高周波成分を除去する工程と、
高周波成分が除去された前記推定速度と高周波成分が除去された前記実速度との偏差を算出する工程と、
偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と、
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項9】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記算出された偏差の高調波成分を除去する工程と、
前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と、
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項10】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記ダイナモメータに接続される実軸トルクと検出する工程を備え、
前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項11】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する工程とを備え、
前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項12】
前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系において、互いに同一の特性で高周波成分を除去する工程をさらに有することを特徴とする請求項10または11のいずれかに記載の動力伝達系の試験装置の制御方法。
【請求項13】
前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去する工程をさらに有することを特徴とする請求項10または11のいずれに記載の動力伝達系の試験装置の制御方法。
【請求項14】
前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする請求項8、9、12、または13のいずれかに記載の動力伝達系の試験装置の制御方法。
【請求項1】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記速度検出手段で検出された実速度から高周波成分を除去するフィルタ手段1と、
前記速度推定手段で推定された推定速度から高周波成分を除去するフィルタ手段2と、
フィルタ手段2で高周波成分が除去された前記推定速度とフィルタ手段1で高周波成分が除去された前記実速度との偏差を算出する偏差算出手段と、
偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする動力伝達系の試験装置。
【請求項2】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記偏差の高調波成分を除去するフィルタ手段と、
前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と、
を有することを特徴とする動力伝達系の試験装置。
【請求項3】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記ダイナモメータに接続される実軸トルクと検出する軸トルク検出手段を備え、
前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と
を有することを特徴とする動力伝達系の試験装置。
【請求項4】
動力源を含む動力伝達系の試験装置であって、
前記動力伝達系に軸を介して接続され前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生するダイナモメータと、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する速度推定手段と、
前記推定速度と前記実速度との偏差を算出する偏差算出手段と、
前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する駆動トルク予測手段とを備え、
前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定するトルク推定手段とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する制御手段と
を有することを特徴とする動力伝達系の試験装置。
【請求項5】
前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系に、互いに同一の特性で高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする請求項3または4いずれかに記載の動力伝達系の試験装置。
【請求項6】
前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去するローパスフィルタ手段を設けたことを特徴とする請求項3または4のいずれに記載の動力伝達系の試験装置。
【請求項7】
前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする請求項1、2、5、または6のいずれかに記載の動力伝達系の試験装置。
【請求項8】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生させるか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生させる工程と、
前記実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記速度検出手段で検出された実速度と前記速度推定手段で推定された推定速度とから高周波成分を除去する工程と、
高周波成分が除去された前記推定速度と高周波成分が除去された前記実速度との偏差を算出する工程と、
偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と、
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項9】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する速度検出手段と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記算出された偏差の高調波成分を除去する工程と、
前記高調波成分が除去された偏差にオブザーバゲインを乗算することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と、
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項10】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記ダイナモメータに接続される実軸トルクと検出する工程を備え、
前記偏差にオブザーバゲインを乗算し、前記検出された軸トルクによって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項11】
動力源を含む動力伝達系の試験方法であって、
前記動力伝達系に軸を介して接続されたダイナモメータによって、前記軸にトルクを発生するか、又は前記動力源を模擬して前記動力源の出力軸にトルクを発生する工程と、
前記ダイナモメータの実速度を検出する工程と、
一慣性系をモデルとして前記ダイナモメータの速度を推定する工程と、
前記推定速度と前記実速度との偏差を算出する工程と、
前記動力伝達系の動力源のトルク指令値発生手段又は駆動トルクを予測する工程とを備え、
前記偏差にオブザーバゲインを乗算し、前記トルク指令値又は駆動トルク予測値によって補償することにより、前記軸又は前記出力軸の軸トルクを推定する工程とを備え、
前記推定された軸トルクに基づいて前記動力源から見たダイナモメータの慣性量、またはダイナモメータで模擬する動力源の慣性量を所望の慣性量となるように前記ダイナモメータの発生トルクを制御する工程と
を有することを特徴とする動力伝達系の試験装置の制御方法。
【請求項12】
前記実速度と推定速度の偏差の算出の前段で、これら実速度と推定速度とのそれぞれの信号系において、互いに同一の特性で高周波成分を除去する工程をさらに有することを特徴とする請求項10または11のいずれかに記載の動力伝達系の試験装置の制御方法。
【請求項13】
前記実速度と推定速度との偏差の算出の後段で、その高周波成分を除去する工程をさらに有することを特徴とする請求項10または11のいずれに記載の動力伝達系の試験装置の制御方法。
【請求項14】
前記動力源へのトルク指令値又は駆動トルク予測値の変化点を判断し、トルク指令値又は駆動トルク予測値の変化点で、フィルタ手段のフィルタ時定数を切り換える変化点判断手段を有することを特徴とする請求項8、9、12、または13のいずれかに記載の動力伝達系の試験装置の制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−242592(P2006−242592A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−54859(P2005−54859)
【出願日】平成17年2月28日(2005.2.28)
【出願人】(000002059)神鋼電機株式会社 (1,111)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年2月28日(2005.2.28)
【出願人】(000002059)神鋼電機株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]