
動力伝達装置及びそれを備えた測量機
【課題】 手動調整のときに従動軸をわずかな力で回転させることができ、手動から電動への切替のときに電動機の回転力が従動軸に伝達される状態に簡単に戻すことができる動力伝達装置を提供すること。
【解決手段】 駆動力伝達ねじ歯車4Hと駆動力伝達平歯車5Hとを互いに独立回転可能なように同軸上に配置し、これらの歯車4H,5Hの端面間に生じる摩擦力を利用して軸駆動モータ1Hの回転力を、鉛直軸部23gに固定された軸平歯車8Hに伝達するようにした。
【解決手段】 駆動力伝達ねじ歯車4Hと駆動力伝達平歯車5Hとを互いに独立回転可能なように同軸上に配置し、これらの歯車4H,5Hの端面間に生じる摩擦力を利用して軸駆動モータ1Hの回転力を、鉛直軸部23gに固定された軸平歯車8Hに伝達するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は任意に駆動力を断続して伝動できる動力伝達装置及びそれを備えた測量機に関する。
【背景技術】
【0002】
従来、電動式の測量機は、望遠鏡部を鉛直軸及び水平軸周りへそれぞれ回転させる2つの駆動用電動機を備えている。これらの駆動用電動機の回転力は動力伝達装置を介して望遠鏡部に伝達される。
【0003】
測量機では高い測定精度(測角精度)が求められるので、駆動用電動機の動力伝達装置の減速比を大きくしてある。このため、例えば、望遠鏡部の視準軸の向きを大きく変えるには時間がかかった。
【0004】
この不都合を解消するため、従来、測量機の望遠鏡部に手の力を直接加え、望遠鏡部の視準軸を大まかに調整し、視準軸の細かな調整を電動で行なっていた。
【0005】
この手動による調整を可能とするために、従来、動力伝達装置の一部分に摩擦力によって動力を伝達する摩擦力発生部材(例えば皿バネ)を採用したり(下記特許文献1参照)、或いは動力伝達装置の一部の歯車の噛合を解除する解除機構を採用したりしていた(下記特許文献2参照)。
【特許文献1】特開平11−230749号公報(段落0022、図2参照)
【特許文献2】特開平7−19873号公報(段落0026〜0027、図3参照)
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述の摩擦力発生部材を有する動力伝達装置を備えた測量機では、特別な操作をすることなく、手動で望遠鏡部の視準軸を大まかに調整することができる。しかし、手動で望遠鏡部を動かすには、摩擦力発生部材によって発生する摩擦力に打ち勝つ力を望遠鏡部に与えなければならない。このために三脚が動き、測定精度が低下する虞があった。また、手の力で望遠鏡部が変形する虞もあった。
【0007】
一方、解除機構を有する動力伝達装置を備えた測量機では、解除機構により歯車の噛み合わせを解除すれば、手による僅かな力で望遠鏡部を回転させることができる。その結果、三脚が動いたり、望遠鏡部が変形したりせず、測定精度が低下する虞がない。
【0008】
しかし、この測量機には、手動から電動に切り替えるとき、望遠鏡部を慎重に回転させて、歯車同士が噛み合う位置を探さなければならず、この切替作業が面倒であるとともに、望遠鏡部の視準軸が動くことがあるという問題があった。
【0009】
この発明はこのような事情に鑑みてなされたもので、その課題は手動調整のときに従動軸をわずかな力で回転させることができ、手動から電動への切替のときに電動機の回転力が従動軸に伝達される状態に簡単に戻すことができる動力伝達装置を提供することである。
【課題を解決するための手段】
【0010】
前述の課題を解決するため請求項1の発明の動力伝達装置は、相対的に回転可能に支持された従動軸に、同軸上に位置する独立回転可能な2つの第1、第2の歯車の端面間に生じる摩擦力を利用して駆動用電動機の回転力を任意に断続して伝達することを特徴とする。
【0011】
請求項2の発明の動力伝達装置は、請求項1記載の動力伝達装置において、前記第1の歯車は、第1の軸に回転可能に装着されて、前記駆動用電動機の回転力を伝達する原動軸側歯車と噛合し、前記第2の歯車は、前記第1の軸に回転可能に装着され、前記従動軸に回転力を伝達する従動軸側歯車と噛合し、前記第1の歯車の一端面を支持する支持部材が、前記第1の軸に設けられ、前記第1の軸に雄ねじが形成され、動力断続用電動機の回転力を伝達する伝達歯車と噛合し、この伝達歯車から所定方向の回転力が作用すると前記雄ねじに対して締結方向へ回転して、前記第2の歯車を前記第1の歯車に押圧し、前記第1、第2の歯車間の摩擦力を大きくし、前記伝達歯車から前記所定方向と反対方向の回転力が作用すると前記雄ねじに対して反締結方向へ回転して、前記第1、第2の歯車間の摩擦力を小さくする第3の歯車が、前記雄ねじに螺合していることを特徴とする。
【0012】
請求項3の発明は、請求項2記載の動力伝達装置において、前記第1の歯車の一端面と前記支持部材の支持面との間、前記第2の歯車の一端面と前記第3の歯車の一端面との間にそれぞれスラスト軸受が配置されていることを特徴とする。
【0013】
請求項4の発明の測量機は、望遠鏡部を鉛直軸及び水平軸の少なくとも一方の軸周りへ回転させる前記駆動用電動機の回転力を請求項1から3のいずれか1項記載の動力伝達装置によって伝達することを特徴とする。
【発明の効果】
【0014】
以上説明したようにこの発明によれば、手動調整のときに従動軸をわずかな力で回転させることができ、手動から電動への切替のときに電動機の回転力が従動軸に伝達される状態に簡単に戻すことができる。
【発明を実施するための最良の形態】
【0015】
以下、この発明の実施の形態を図面に基づいて説明する。
【0016】
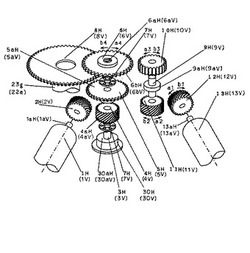
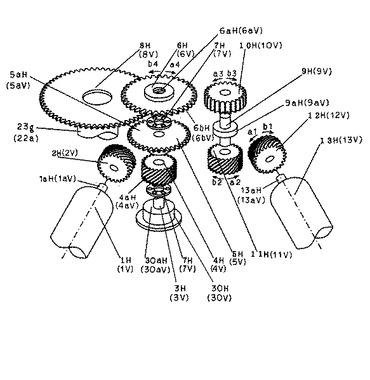
図1はこの発明の一実施形態に係る動力伝達装置の分解斜視図である。
【0017】
この動力伝達装置は図2〜4に示す測量機に内蔵される。内蔵された動力伝達装置は、後述の望遠鏡部22(図2参照)を鉛直軸周りへ回転させるために上盤24(図2参照)に駆動力を伝達する動力伝達装置と、望遠鏡部22を水平軸周りへ回転させるために望遠鏡部22に駆動力を伝達する動力伝達装置の2つである。望遠鏡部22用の動力伝達装置と上盤24用の動力伝達装置とでは各装置の構成部品、歯車の噛合せ等の基本的な構成は同じであるので、図1中に、上盤24用の動力伝達装置の構成部品の参照符号を記すとともに括弧内に望遠鏡部22用の動力伝達装置の構成部品の参照符号を記す。
【0018】
この動力伝達装置は、駆動モータ出力ねじ歯車(原動軸側歯車)2H(2V)、断続機構軸(第1の軸)3H(3V)、駆動力伝達ねじ歯車(第1の歯車)4H(4V)、駆動力伝達平歯車(第2の歯車)5H(5V)、断続切替平歯車(第3の歯車)6H(6V)、鋼球列(スラストベアリング)7H(7V)、軸平歯車(従動軸側歯車)8H(8V)、断続切替軸9H(9V)、切替軸平歯車(伝達歯車)10H(10V)等を有する。
【0019】
軸駆動モータ(駆動用電動機)1H(1V)にはギヤヘッド14H(14V)(図4(図3)参照)が装着されている。軸駆動モータ1H(1V)の回転軸1aH(1aV)はギヤヘッド14H(14V)の入力軸(図示せず)に連結され、回転軸1aH(1aV)の回転はギヤヘッド14H(14V)によって減速され、ギヤヘッド14H(14V)の出力軸(図示せず)から出力される。ギヤヘッド14H(14V)の出力軸には駆動モータ出力ねじ歯車2H(2V)が固定されている。
【0020】
断続機構軸3H(3V)の一端にはほぼ円板状の支持部材30H(30V)が同軸に結合されている。断続機構軸3H(3V)の他端部には雄ねじ3aH(3aV)(図3(図2)参照)が形成されている。
【0021】
断続機構軸3H(3V)には駆動力伝達ねじ歯車4H(4V)が回転可能に装着され、支持部材30H,30Vの支持面30aH,30aVに支持されている。駆動力伝達ねじ歯車4H(4V)は駆動モータ出力ねじ歯車2H(2V)と噛み合っている。駆動力伝達ねじ歯車4H(4V)の一端面4aH(4aV)と支持部材30H(30V)の支持面30aH(30aV)との間には鋼球列(スラスト軸受け)7H(7V)が配置されている。また、断続機構軸3H(3V)には、駆動力伝達平歯車5H(5V)が回転可能に装着されている。駆動力伝達平歯車5H(5V)の端面は駆動力伝達ねじ歯車4H,4Vの端面に接触する。駆動力伝達平歯車5H(5V)は軸平歯車8H(8V)と噛み合っている。雄ねじ3aH(3aV)は断続切替平歯車6H(6V)の雌ねじ6aH(6aV)にねじ込まれている。断続切替平歯車6H(6V)の一端面6bH(6bV)と駆動力伝達平歯車5H(5V)の一端面5aH(5aV)との間には鋼球列7H(7v)が配置されている。
【0022】
断続切替モータ13H(13V)にはギヤヘッド15H(15V)(図4(図3)参照)が装着されている。断続切替モータ13H(13V)の回転軸13aH(13aV)はギヤヘッド15H(15V)の入力軸(図示せず)に連結され、回転軸13aH(13aV)の回転はギヤヘッド15H(15V)によって減速され、ギヤヘッド15H(15V)の出力軸(図示せず)から出力される。ギヤヘッド15H(15V)の出力軸には切替モータ出力ねじ歯車12H(12V)が固定されている。
【0023】
断続切替軸9H(9V)は断続機構軸3H(3V)に対して平行であり、断続機構軸3H(3V)の近傍に回転可能に配置されている。断続切替軸9H(9V)にはほぼ円板状のスペーサ9aH(9aV)が設けられている。断続切替軸9H(9V)の一端部には切替軸ねじ歯車11H(11V)が固定され、断続切替軸9H(9V)は切替軸ねじ歯車11H(11V)と一体に回転する。切替軸ねじ歯車11H(11V)は切替モータ出力ねじ歯車12H(12V)と噛み合っている。断続切替軸9H(9V)の他端部には切替軸平歯車10H(10V)が固定され、切替軸平歯車10H(10V)は断続切替軸9H(9V)と一体に回転する。切替軸平歯車10H(10V)は断続切替平歯車6H(6V)と噛み合っている。
【0024】
軸駆動モータ1H(1V)の回転力を測量機20の鉛直軸部(従動軸)23g(水平軸部(従動軸)22a)に伝達するには、まず、図1に示すように、断続切替モータ13H(13V)によって切替モータ軸出力ねじ歯車12H(12V)を矢印a1方向へ回す。切替モータ軸出力ねじ歯車12H(12V)が矢印a1方向へ回転すると、切替軸ねじ歯車11H(11V)が矢印a2方向へ回転し、この回転が断続切替軸9H(9V)を介して切替軸平歯車10H(10V)に伝達され、切替軸平歯車10H(10V)が矢印a3方向へ回転する。切替軸平歯車10H(10V)が矢印a3方向へ回転すると、断続切替平歯車6H(6V)が矢印a4方向へ回転する。断続切替平歯車6H(6V)が矢印a4方向へ回転すると、断続切替平歯車6H(6V)は支持部材30H(30V)へ近づく方向(締結方向)へ移動する。断続切替平歯車6H(6V)が移動すると、駆動力伝達平歯車5H(5V)は駆動力伝達ねじ歯車4H(4V)に押し付けられ、駆動力伝達平歯車5H(5V)と駆動力伝達ねじ歯車4H(4V)との間に軸駆動モータ1H(1V)の回転力を軸平歯車8H(8V)に伝達するのに十分な摩擦力が発生する。この結果、軸駆動モータ1H(1V)の回転力が駆動モータ出力ねじ歯車2H(2V)、駆動力伝達ねじ歯車4H(4V)、駆動力伝達平歯車5H(5V)等を介して軸平歯車8H(8V)に伝達される。
【0025】
軸平歯車8H(8V)への回転力の伝達を断つには、図1に示すように、断続切替モータ13H(13V)の回転方向を逆にして切替モータ軸出力ねじ歯車12H(12V)を矢印b1方向へ回す。切替モータ軸出力ねじ歯車12H(12V)が矢印b1方向へ回転すると、切替軸ねじ歯車11H(11V)が矢印b2方向へ回転するとともに切替軸平歯車10H(10V)が矢印b3方向へ回転する。切替軸平歯車10H(10V)が矢印b3方向へ回転すると、断続切替平歯車6H(6V)が矢印b4方向へ回転する。断続切替平歯車6H(6V)が矢印b4方向へ回転すると、断続切替平歯車6H(6V)は支持部材30H(30V)から離れる方向(反締結方向)へ移動する。断続切替平歯車6H(6V)が移動すると、駆動力伝達平歯車5H(5V)の駆動力伝達ねじ歯車4H(4V)に対する押付力が小さくなるため、駆動力伝達平歯車5H(5V)と駆動力伝達ねじ歯車4H(4V)との間の摩擦力が小さくなり、軸駆動モータ1H(1V)の回転力が駆動力伝達ねじ歯車4H(4V)から駆動力伝達平歯車5H(5V)へ伝達されなくなる。この結果、軸駆動モータ1H(1V)から軸平歯車8H(8V)への伝達経路が切断され、軸駆動モータ1H(1V)の回転力が軸平歯車8H(8V)に伝達されなくなる。
【0026】
次に、この動力伝達装置を備えた測量機について説明する。
【0027】
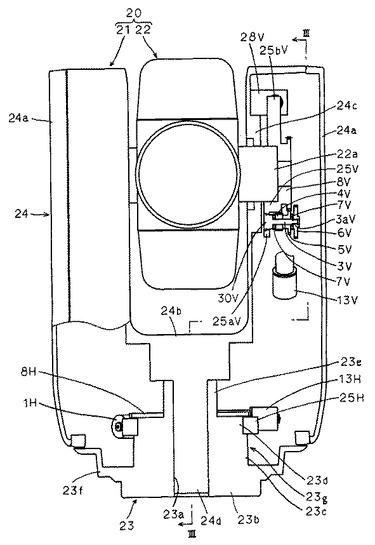
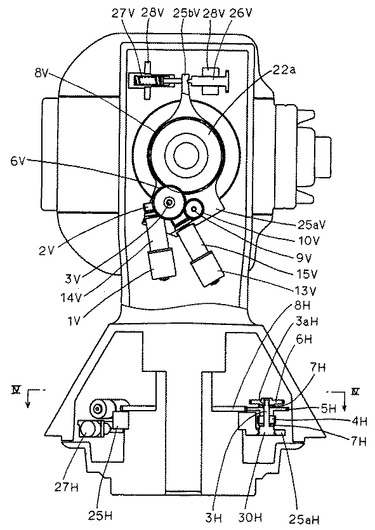
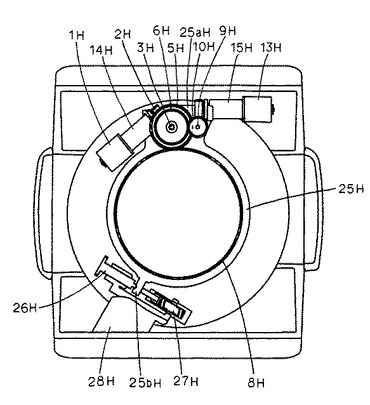
図2は図1に示す動力伝達装置を備えた測量機の破断面を示す概念図、図3は図2のIII−III線に沿う断面を示す概念図、図4は図3のIV−IV線に沿う断面を示す概念図である。
【0028】
この測量機は本体21と望遠鏡部22とを備える。
【0029】
本体21は下盤23と上盤24とを有する。
【0030】
下盤23の中心部には保持孔23aが形成されている。下盤23は基部23bと第1大径部23cと第2大径部23dと小径部23eと鍔部23fとを有する。基部23bは三脚(図示せず)に固定される。第1大径部23cと第2大径部23dと小径部23eとで鉛直軸部23gが構成されている。
【0031】
上盤24は、一対の支柱部24aと、この一対の支柱部24aの下部同士を連結する連結部24bとを有する。支柱部24aには軸受部24cが形成されている。連結部24bには軸部24dが形成されている。軸部24dは保持孔23aに回転自在に保持されている。したがって、上盤24は下盤3上で鉛直軸周りへ回転できる。
【0032】
望遠鏡部22は水平軸部22aを有する。水平軸部22aは軸受部24cに回転可能に支持されている。したがって、望遠鏡部22は水平軸周りへ回転できる。
【0033】
上盤駆動用の動力伝達装置は、上盤24を鉛直軸周りへ回転させるために下盤23に設けられている。望遠鏡部駆動用の動力伝達装置は、望遠鏡部22を水平軸周りへ回転させるために一方の支柱部24a内に設けられている。
【0034】
第2大径部23dには環状体25Hが回転可能に装着されている。環状体25Hは支持部25aHとアーム部25bHとを有する。アーム部25bHは支持部25aHに対して周方向へ180°変位した位置にある。
【0035】
上盤24内に設けられたステー28Hに微動ねじ26Hと押付装置27Hとが設けられている。微動ねじ26Hはアーム部25bHを受け止める。押付装置27Hはアーム部25bHを常に微動ねじ26Hに押し付ける。したがって、環状体25Hは上盤24に連結され、環状体25Hと上盤24とは一体に回転できる。
【0036】
軸駆動モータ1Hに装着されたギヤヘッド14Hは支持部25aHに支持されている。断続切替モータ13Hに装着されたギヤヘッド15Hは支持部25aHに支持されている。支持部材30Hは支持部25aHに固定されている。断続切替軸9H(図4参照)は支持部25aHに回転可能に支持されている。
【0037】
軸平歯車8Hは第2大径部23dの上面に固定されている。
【0038】
軸受部24c(図2参照)に支持された水平軸部22aの端部の外周面には環状体25Vが相対的に回転可能に装着されている。環状体25Vは支持部25aVとアーム部25bVとを有する。アーム部25bVは支持部25aVに対して周方向へ180°変位した位置にある。
【0039】
支柱部24a内に設けられたステー28Vに微動ねじ26Vと押付装置27Vとが設けられている(図3参照)。微動ねじ26Vはアーム部25bVを受け止める。押付装置27Vはアーム部25bVを常に微動ねじ26Vに押し付ける。したがって、環状体25Vは支柱部24aに連結され、水平軸部22aが回転してもそれに連れて環状体25Vが回転しない。
【0040】
軸駆動モータ1Vに装着されたギヤヘッド14Vは支持部25aVに支持されている。断続切替モータ13Vに装着されたギヤヘッド15Vは支持部25aVに支持されている。支持部材30Vは支持部25aVに固定されている。断続切替軸9Vは支持部25aVに回転可能に支持されている。
【0041】
軸平歯車8Vは水平軸部22aの先端面に固定されている。
【0042】
上盤24を電動で鉛直軸周りへ回転させるためには、駆動力伝達ねじ歯車4Hの回転が駆動力伝達歯車5Hに伝達される状態にしておく。この状態で、軸駆動モータ1Hを回転させると、駆動モータ出力ねじ歯車2Hが回転し、それに伴い駆動力伝達ねじ歯車4Hが回転する。駆動力伝達ねじ歯車4Hが回転すると、その回転が駆動力伝達平歯車5Hに伝達され、駆動力伝達平歯車5Hが回転する。軸平歯車8Hは下盤23の第2大径部23dに固定されているので、駆動力伝達平歯車5Hが回転すると、駆動力伝達平歯車5Hが軸平歯車8の周囲をまわる。したがって、環状体25Hが鉛直軸周りへ回転し、これに伴って上盤24(ひいては望遠鏡部22)が鉛直軸周りへ回転する。
【0043】
上盤24を手動で鉛直軸周りへ回転させるには、上述のように、駆動力伝達用ねじ歯車4Hから駆動力伝達平歯車5Hを切り離せばよい。
【0044】
望遠鏡部22を電動で水平軸周りへ回転させるためには、駆動力伝達ねじ歯車4Vの回転が駆動力伝達歯車5Vに伝達される状態にしておく。この状態で、軸駆動モータ1Vを回転させると、駆動モータ出力ねじ歯車2Vが回転し、それに伴い駆動力伝達ねじ歯車4Vが回転する。駆動力伝達ねじ歯車4Vが回転すると、その回転が駆動力伝達平歯車5Vに伝達され、駆動力伝達平歯車5Vが回転する。軸平歯車8Vは水平軸部22aに固定されているので、駆動力伝達平歯車5Vが回転すると、軸平歯車8Vが回転する。したがって、望遠鏡部22が水平軸周りへ回転する。このとき、環状体25Vに作用する反作用により、環状体25Vは望遠鏡部22の回転方向と逆方向へ回転しようとするが、アーム部25bVが微動ねじ26Vと押付装置27Vとで挟まれているので、回転しない。
【0045】
望遠鏡部22を手動で水平軸周りに回転させるには、上述のように、駆動力伝達用ねじ歯車4Vから駆動力伝達平歯車5Vを切り離せばよい。
【0046】
この実施形態によれば、駆動力伝達用ねじ歯車4H,4Vから駆動力伝達平歯車5H,5Vを切り離すことができるので、手動によって望遠鏡部22を僅かな力で回転させることができる。
【0047】
また、手動から電動に切替える場合、駆動力伝達平歯車5H,5Vを駆動力伝達用ねじ歯車4H,4Vに押し付けるだけでいいので、歯車同士が噛み合う位置を探す必要がなく、切替作業が簡単である。
【0048】
更に、支持部材30H,30Vと駆動力伝達ねじ歯車4H,4Vとの間及び駆動力伝達平歯車5H,5Vと断続切替平歯車6H,6Vとの間にそれぞれ鋼球列7H,7Vを配置したので、断続切替平歯車6H,6Vによって駆動力伝達平歯車5H,5Vを駆動力伝達ねじ歯車4H,4Vに押し付けても、駆動力伝達ねじ歯車4H,4V及び駆動力伝達平歯車5H,5Vは円滑に回転する。
【0049】
また、微動ねじ26H,26Vを回転させて微動ねじ26H,26Vの位置を変えることによって、上盤24や望遠鏡部22の向きを微調整することができる。
【0050】
更に、環状体25H,25Vのアーム部25bH,25bVが微動ねじ26H,26Vと押付装置27H,27Vとで挟まれているので、上盤24に鉛直軸周りの強い外力が加わったり、望遠鏡部22に水平軸周りの強い外力が加わったりしても、その外力を押付装置27H,27Vによって吸収することができる。
【0051】
また、駆動モータ出力ねじ歯車2H,2Vと駆動力伝達ねじ歯車4H,4Vとを用いているので、駆動モータ1H,1Vの回転軸1aH,1aVを断続機構軸3H,3Vに対して直角にすることができ、これらの部分をコンパクトに纏めることができる。同様に、切替モータ出力ねじ歯車12H,12Vと切替軸ねじ歯車11H,11Vとを用いているので、断続切替モータ13H,13Vの回転軸13aH,13aVを断続切替軸9H,9Vに対して直角にすることができ、これらの部分をコンパクトに纏めることができる。
【0052】
なお、この実施形態では、断続切替モータ13H,13Vによって断続切替平歯車6H,6Vを回転させるようにしたが、手動によって直接或いは間接的に断続切替平歯車6H,6Vを回転させるようにしてもよい。
【0053】
また、この実施形態では動力伝達装置を測量機用部品として用いたが、測量機以外の装置に用いることができる。
【0054】
なお、必ずしも鋼球列7H,7Vを用いる必要はない。
【図面の簡単な説明】
【0055】
【図1】図1はこの発明の一実施形態に係る動力伝達装置の分解斜視図である。
【図2】図2は図1に示す動力伝達装置を備えた測量機の破断面を示す概念図である。
【図3】図3は図2のIII‐III線に沿う断面を示す概念図である。
【図4】図4は図3のIV‐IV線に沿う断面を示す概念図である。
【符号の説明】
【0056】
1H,1V:軸駆動モータ(駆動用電動機)、2H,2V:駆動モータ出力ねじ歯車(原動機側歯車)、3H,3V:断続機構軸(第1の軸)、3aH,3aV:雄ねじ、4H,4V:駆動力伝達ねじ歯車(第1の歯車)、4ah,4aV:一端面、5H,5V:駆動力伝達平歯車(第2の歯車)、5aH,5aV:一端面、6H,6V:断続切替平歯車(第3の歯車)、6aH,6aV:一端面、7H,7V:鋼球列(スラスト軸受)、8H,8V:軸平歯車(従動軸側歯車)、9H,9V:断続切替軸、10H,10V:切替軸平歯車(伝達歯車)、11H,11V:切替軸ねじ歯車、12H,12V:切替モータ出力ねじ歯車、13H,13V:断続切替モータ、22:望遠鏡部、22a:水平軸部(従動軸)、23g:鉛直軸部(従動軸)、30H,30V:支持部材、30aH,30aV:支持面。
【技術分野】
【0001】
この発明は任意に駆動力を断続して伝動できる動力伝達装置及びそれを備えた測量機に関する。
【背景技術】
【0002】
従来、電動式の測量機は、望遠鏡部を鉛直軸及び水平軸周りへそれぞれ回転させる2つの駆動用電動機を備えている。これらの駆動用電動機の回転力は動力伝達装置を介して望遠鏡部に伝達される。
【0003】
測量機では高い測定精度(測角精度)が求められるので、駆動用電動機の動力伝達装置の減速比を大きくしてある。このため、例えば、望遠鏡部の視準軸の向きを大きく変えるには時間がかかった。
【0004】
この不都合を解消するため、従来、測量機の望遠鏡部に手の力を直接加え、望遠鏡部の視準軸を大まかに調整し、視準軸の細かな調整を電動で行なっていた。
【0005】
この手動による調整を可能とするために、従来、動力伝達装置の一部分に摩擦力によって動力を伝達する摩擦力発生部材(例えば皿バネ)を採用したり(下記特許文献1参照)、或いは動力伝達装置の一部の歯車の噛合を解除する解除機構を採用したりしていた(下記特許文献2参照)。
【特許文献1】特開平11−230749号公報(段落0022、図2参照)
【特許文献2】特開平7−19873号公報(段落0026〜0027、図3参照)
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述の摩擦力発生部材を有する動力伝達装置を備えた測量機では、特別な操作をすることなく、手動で望遠鏡部の視準軸を大まかに調整することができる。しかし、手動で望遠鏡部を動かすには、摩擦力発生部材によって発生する摩擦力に打ち勝つ力を望遠鏡部に与えなければならない。このために三脚が動き、測定精度が低下する虞があった。また、手の力で望遠鏡部が変形する虞もあった。
【0007】
一方、解除機構を有する動力伝達装置を備えた測量機では、解除機構により歯車の噛み合わせを解除すれば、手による僅かな力で望遠鏡部を回転させることができる。その結果、三脚が動いたり、望遠鏡部が変形したりせず、測定精度が低下する虞がない。
【0008】
しかし、この測量機には、手動から電動に切り替えるとき、望遠鏡部を慎重に回転させて、歯車同士が噛み合う位置を探さなければならず、この切替作業が面倒であるとともに、望遠鏡部の視準軸が動くことがあるという問題があった。
【0009】
この発明はこのような事情に鑑みてなされたもので、その課題は手動調整のときに従動軸をわずかな力で回転させることができ、手動から電動への切替のときに電動機の回転力が従動軸に伝達される状態に簡単に戻すことができる動力伝達装置を提供することである。
【課題を解決するための手段】
【0010】
前述の課題を解決するため請求項1の発明の動力伝達装置は、相対的に回転可能に支持された従動軸に、同軸上に位置する独立回転可能な2つの第1、第2の歯車の端面間に生じる摩擦力を利用して駆動用電動機の回転力を任意に断続して伝達することを特徴とする。
【0011】
請求項2の発明の動力伝達装置は、請求項1記載の動力伝達装置において、前記第1の歯車は、第1の軸に回転可能に装着されて、前記駆動用電動機の回転力を伝達する原動軸側歯車と噛合し、前記第2の歯車は、前記第1の軸に回転可能に装着され、前記従動軸に回転力を伝達する従動軸側歯車と噛合し、前記第1の歯車の一端面を支持する支持部材が、前記第1の軸に設けられ、前記第1の軸に雄ねじが形成され、動力断続用電動機の回転力を伝達する伝達歯車と噛合し、この伝達歯車から所定方向の回転力が作用すると前記雄ねじに対して締結方向へ回転して、前記第2の歯車を前記第1の歯車に押圧し、前記第1、第2の歯車間の摩擦力を大きくし、前記伝達歯車から前記所定方向と反対方向の回転力が作用すると前記雄ねじに対して反締結方向へ回転して、前記第1、第2の歯車間の摩擦力を小さくする第3の歯車が、前記雄ねじに螺合していることを特徴とする。
【0012】
請求項3の発明は、請求項2記載の動力伝達装置において、前記第1の歯車の一端面と前記支持部材の支持面との間、前記第2の歯車の一端面と前記第3の歯車の一端面との間にそれぞれスラスト軸受が配置されていることを特徴とする。
【0013】
請求項4の発明の測量機は、望遠鏡部を鉛直軸及び水平軸の少なくとも一方の軸周りへ回転させる前記駆動用電動機の回転力を請求項1から3のいずれか1項記載の動力伝達装置によって伝達することを特徴とする。
【発明の効果】
【0014】
以上説明したようにこの発明によれば、手動調整のときに従動軸をわずかな力で回転させることができ、手動から電動への切替のときに電動機の回転力が従動軸に伝達される状態に簡単に戻すことができる。
【発明を実施するための最良の形態】
【0015】
以下、この発明の実施の形態を図面に基づいて説明する。
【0016】
図1はこの発明の一実施形態に係る動力伝達装置の分解斜視図である。
【0017】
この動力伝達装置は図2〜4に示す測量機に内蔵される。内蔵された動力伝達装置は、後述の望遠鏡部22(図2参照)を鉛直軸周りへ回転させるために上盤24(図2参照)に駆動力を伝達する動力伝達装置と、望遠鏡部22を水平軸周りへ回転させるために望遠鏡部22に駆動力を伝達する動力伝達装置の2つである。望遠鏡部22用の動力伝達装置と上盤24用の動力伝達装置とでは各装置の構成部品、歯車の噛合せ等の基本的な構成は同じであるので、図1中に、上盤24用の動力伝達装置の構成部品の参照符号を記すとともに括弧内に望遠鏡部22用の動力伝達装置の構成部品の参照符号を記す。
【0018】
この動力伝達装置は、駆動モータ出力ねじ歯車(原動軸側歯車)2H(2V)、断続機構軸(第1の軸)3H(3V)、駆動力伝達ねじ歯車(第1の歯車)4H(4V)、駆動力伝達平歯車(第2の歯車)5H(5V)、断続切替平歯車(第3の歯車)6H(6V)、鋼球列(スラストベアリング)7H(7V)、軸平歯車(従動軸側歯車)8H(8V)、断続切替軸9H(9V)、切替軸平歯車(伝達歯車)10H(10V)等を有する。
【0019】
軸駆動モータ(駆動用電動機)1H(1V)にはギヤヘッド14H(14V)(図4(図3)参照)が装着されている。軸駆動モータ1H(1V)の回転軸1aH(1aV)はギヤヘッド14H(14V)の入力軸(図示せず)に連結され、回転軸1aH(1aV)の回転はギヤヘッド14H(14V)によって減速され、ギヤヘッド14H(14V)の出力軸(図示せず)から出力される。ギヤヘッド14H(14V)の出力軸には駆動モータ出力ねじ歯車2H(2V)が固定されている。
【0020】
断続機構軸3H(3V)の一端にはほぼ円板状の支持部材30H(30V)が同軸に結合されている。断続機構軸3H(3V)の他端部には雄ねじ3aH(3aV)(図3(図2)参照)が形成されている。
【0021】
断続機構軸3H(3V)には駆動力伝達ねじ歯車4H(4V)が回転可能に装着され、支持部材30H,30Vの支持面30aH,30aVに支持されている。駆動力伝達ねじ歯車4H(4V)は駆動モータ出力ねじ歯車2H(2V)と噛み合っている。駆動力伝達ねじ歯車4H(4V)の一端面4aH(4aV)と支持部材30H(30V)の支持面30aH(30aV)との間には鋼球列(スラスト軸受け)7H(7V)が配置されている。また、断続機構軸3H(3V)には、駆動力伝達平歯車5H(5V)が回転可能に装着されている。駆動力伝達平歯車5H(5V)の端面は駆動力伝達ねじ歯車4H,4Vの端面に接触する。駆動力伝達平歯車5H(5V)は軸平歯車8H(8V)と噛み合っている。雄ねじ3aH(3aV)は断続切替平歯車6H(6V)の雌ねじ6aH(6aV)にねじ込まれている。断続切替平歯車6H(6V)の一端面6bH(6bV)と駆動力伝達平歯車5H(5V)の一端面5aH(5aV)との間には鋼球列7H(7v)が配置されている。
【0022】
断続切替モータ13H(13V)にはギヤヘッド15H(15V)(図4(図3)参照)が装着されている。断続切替モータ13H(13V)の回転軸13aH(13aV)はギヤヘッド15H(15V)の入力軸(図示せず)に連結され、回転軸13aH(13aV)の回転はギヤヘッド15H(15V)によって減速され、ギヤヘッド15H(15V)の出力軸(図示せず)から出力される。ギヤヘッド15H(15V)の出力軸には切替モータ出力ねじ歯車12H(12V)が固定されている。
【0023】
断続切替軸9H(9V)は断続機構軸3H(3V)に対して平行であり、断続機構軸3H(3V)の近傍に回転可能に配置されている。断続切替軸9H(9V)にはほぼ円板状のスペーサ9aH(9aV)が設けられている。断続切替軸9H(9V)の一端部には切替軸ねじ歯車11H(11V)が固定され、断続切替軸9H(9V)は切替軸ねじ歯車11H(11V)と一体に回転する。切替軸ねじ歯車11H(11V)は切替モータ出力ねじ歯車12H(12V)と噛み合っている。断続切替軸9H(9V)の他端部には切替軸平歯車10H(10V)が固定され、切替軸平歯車10H(10V)は断続切替軸9H(9V)と一体に回転する。切替軸平歯車10H(10V)は断続切替平歯車6H(6V)と噛み合っている。
【0024】
軸駆動モータ1H(1V)の回転力を測量機20の鉛直軸部(従動軸)23g(水平軸部(従動軸)22a)に伝達するには、まず、図1に示すように、断続切替モータ13H(13V)によって切替モータ軸出力ねじ歯車12H(12V)を矢印a1方向へ回す。切替モータ軸出力ねじ歯車12H(12V)が矢印a1方向へ回転すると、切替軸ねじ歯車11H(11V)が矢印a2方向へ回転し、この回転が断続切替軸9H(9V)を介して切替軸平歯車10H(10V)に伝達され、切替軸平歯車10H(10V)が矢印a3方向へ回転する。切替軸平歯車10H(10V)が矢印a3方向へ回転すると、断続切替平歯車6H(6V)が矢印a4方向へ回転する。断続切替平歯車6H(6V)が矢印a4方向へ回転すると、断続切替平歯車6H(6V)は支持部材30H(30V)へ近づく方向(締結方向)へ移動する。断続切替平歯車6H(6V)が移動すると、駆動力伝達平歯車5H(5V)は駆動力伝達ねじ歯車4H(4V)に押し付けられ、駆動力伝達平歯車5H(5V)と駆動力伝達ねじ歯車4H(4V)との間に軸駆動モータ1H(1V)の回転力を軸平歯車8H(8V)に伝達するのに十分な摩擦力が発生する。この結果、軸駆動モータ1H(1V)の回転力が駆動モータ出力ねじ歯車2H(2V)、駆動力伝達ねじ歯車4H(4V)、駆動力伝達平歯車5H(5V)等を介して軸平歯車8H(8V)に伝達される。
【0025】
軸平歯車8H(8V)への回転力の伝達を断つには、図1に示すように、断続切替モータ13H(13V)の回転方向を逆にして切替モータ軸出力ねじ歯車12H(12V)を矢印b1方向へ回す。切替モータ軸出力ねじ歯車12H(12V)が矢印b1方向へ回転すると、切替軸ねじ歯車11H(11V)が矢印b2方向へ回転するとともに切替軸平歯車10H(10V)が矢印b3方向へ回転する。切替軸平歯車10H(10V)が矢印b3方向へ回転すると、断続切替平歯車6H(6V)が矢印b4方向へ回転する。断続切替平歯車6H(6V)が矢印b4方向へ回転すると、断続切替平歯車6H(6V)は支持部材30H(30V)から離れる方向(反締結方向)へ移動する。断続切替平歯車6H(6V)が移動すると、駆動力伝達平歯車5H(5V)の駆動力伝達ねじ歯車4H(4V)に対する押付力が小さくなるため、駆動力伝達平歯車5H(5V)と駆動力伝達ねじ歯車4H(4V)との間の摩擦力が小さくなり、軸駆動モータ1H(1V)の回転力が駆動力伝達ねじ歯車4H(4V)から駆動力伝達平歯車5H(5V)へ伝達されなくなる。この結果、軸駆動モータ1H(1V)から軸平歯車8H(8V)への伝達経路が切断され、軸駆動モータ1H(1V)の回転力が軸平歯車8H(8V)に伝達されなくなる。
【0026】
次に、この動力伝達装置を備えた測量機について説明する。
【0027】
図2は図1に示す動力伝達装置を備えた測量機の破断面を示す概念図、図3は図2のIII−III線に沿う断面を示す概念図、図4は図3のIV−IV線に沿う断面を示す概念図である。
【0028】
この測量機は本体21と望遠鏡部22とを備える。
【0029】
本体21は下盤23と上盤24とを有する。
【0030】
下盤23の中心部には保持孔23aが形成されている。下盤23は基部23bと第1大径部23cと第2大径部23dと小径部23eと鍔部23fとを有する。基部23bは三脚(図示せず)に固定される。第1大径部23cと第2大径部23dと小径部23eとで鉛直軸部23gが構成されている。
【0031】
上盤24は、一対の支柱部24aと、この一対の支柱部24aの下部同士を連結する連結部24bとを有する。支柱部24aには軸受部24cが形成されている。連結部24bには軸部24dが形成されている。軸部24dは保持孔23aに回転自在に保持されている。したがって、上盤24は下盤3上で鉛直軸周りへ回転できる。
【0032】
望遠鏡部22は水平軸部22aを有する。水平軸部22aは軸受部24cに回転可能に支持されている。したがって、望遠鏡部22は水平軸周りへ回転できる。
【0033】
上盤駆動用の動力伝達装置は、上盤24を鉛直軸周りへ回転させるために下盤23に設けられている。望遠鏡部駆動用の動力伝達装置は、望遠鏡部22を水平軸周りへ回転させるために一方の支柱部24a内に設けられている。
【0034】
第2大径部23dには環状体25Hが回転可能に装着されている。環状体25Hは支持部25aHとアーム部25bHとを有する。アーム部25bHは支持部25aHに対して周方向へ180°変位した位置にある。
【0035】
上盤24内に設けられたステー28Hに微動ねじ26Hと押付装置27Hとが設けられている。微動ねじ26Hはアーム部25bHを受け止める。押付装置27Hはアーム部25bHを常に微動ねじ26Hに押し付ける。したがって、環状体25Hは上盤24に連結され、環状体25Hと上盤24とは一体に回転できる。
【0036】
軸駆動モータ1Hに装着されたギヤヘッド14Hは支持部25aHに支持されている。断続切替モータ13Hに装着されたギヤヘッド15Hは支持部25aHに支持されている。支持部材30Hは支持部25aHに固定されている。断続切替軸9H(図4参照)は支持部25aHに回転可能に支持されている。
【0037】
軸平歯車8Hは第2大径部23dの上面に固定されている。
【0038】
軸受部24c(図2参照)に支持された水平軸部22aの端部の外周面には環状体25Vが相対的に回転可能に装着されている。環状体25Vは支持部25aVとアーム部25bVとを有する。アーム部25bVは支持部25aVに対して周方向へ180°変位した位置にある。
【0039】
支柱部24a内に設けられたステー28Vに微動ねじ26Vと押付装置27Vとが設けられている(図3参照)。微動ねじ26Vはアーム部25bVを受け止める。押付装置27Vはアーム部25bVを常に微動ねじ26Vに押し付ける。したがって、環状体25Vは支柱部24aに連結され、水平軸部22aが回転してもそれに連れて環状体25Vが回転しない。
【0040】
軸駆動モータ1Vに装着されたギヤヘッド14Vは支持部25aVに支持されている。断続切替モータ13Vに装着されたギヤヘッド15Vは支持部25aVに支持されている。支持部材30Vは支持部25aVに固定されている。断続切替軸9Vは支持部25aVに回転可能に支持されている。
【0041】
軸平歯車8Vは水平軸部22aの先端面に固定されている。
【0042】
上盤24を電動で鉛直軸周りへ回転させるためには、駆動力伝達ねじ歯車4Hの回転が駆動力伝達歯車5Hに伝達される状態にしておく。この状態で、軸駆動モータ1Hを回転させると、駆動モータ出力ねじ歯車2Hが回転し、それに伴い駆動力伝達ねじ歯車4Hが回転する。駆動力伝達ねじ歯車4Hが回転すると、その回転が駆動力伝達平歯車5Hに伝達され、駆動力伝達平歯車5Hが回転する。軸平歯車8Hは下盤23の第2大径部23dに固定されているので、駆動力伝達平歯車5Hが回転すると、駆動力伝達平歯車5Hが軸平歯車8の周囲をまわる。したがって、環状体25Hが鉛直軸周りへ回転し、これに伴って上盤24(ひいては望遠鏡部22)が鉛直軸周りへ回転する。
【0043】
上盤24を手動で鉛直軸周りへ回転させるには、上述のように、駆動力伝達用ねじ歯車4Hから駆動力伝達平歯車5Hを切り離せばよい。
【0044】
望遠鏡部22を電動で水平軸周りへ回転させるためには、駆動力伝達ねじ歯車4Vの回転が駆動力伝達歯車5Vに伝達される状態にしておく。この状態で、軸駆動モータ1Vを回転させると、駆動モータ出力ねじ歯車2Vが回転し、それに伴い駆動力伝達ねじ歯車4Vが回転する。駆動力伝達ねじ歯車4Vが回転すると、その回転が駆動力伝達平歯車5Vに伝達され、駆動力伝達平歯車5Vが回転する。軸平歯車8Vは水平軸部22aに固定されているので、駆動力伝達平歯車5Vが回転すると、軸平歯車8Vが回転する。したがって、望遠鏡部22が水平軸周りへ回転する。このとき、環状体25Vに作用する反作用により、環状体25Vは望遠鏡部22の回転方向と逆方向へ回転しようとするが、アーム部25bVが微動ねじ26Vと押付装置27Vとで挟まれているので、回転しない。
【0045】
望遠鏡部22を手動で水平軸周りに回転させるには、上述のように、駆動力伝達用ねじ歯車4Vから駆動力伝達平歯車5Vを切り離せばよい。
【0046】
この実施形態によれば、駆動力伝達用ねじ歯車4H,4Vから駆動力伝達平歯車5H,5Vを切り離すことができるので、手動によって望遠鏡部22を僅かな力で回転させることができる。
【0047】
また、手動から電動に切替える場合、駆動力伝達平歯車5H,5Vを駆動力伝達用ねじ歯車4H,4Vに押し付けるだけでいいので、歯車同士が噛み合う位置を探す必要がなく、切替作業が簡単である。
【0048】
更に、支持部材30H,30Vと駆動力伝達ねじ歯車4H,4Vとの間及び駆動力伝達平歯車5H,5Vと断続切替平歯車6H,6Vとの間にそれぞれ鋼球列7H,7Vを配置したので、断続切替平歯車6H,6Vによって駆動力伝達平歯車5H,5Vを駆動力伝達ねじ歯車4H,4Vに押し付けても、駆動力伝達ねじ歯車4H,4V及び駆動力伝達平歯車5H,5Vは円滑に回転する。
【0049】
また、微動ねじ26H,26Vを回転させて微動ねじ26H,26Vの位置を変えることによって、上盤24や望遠鏡部22の向きを微調整することができる。
【0050】
更に、環状体25H,25Vのアーム部25bH,25bVが微動ねじ26H,26Vと押付装置27H,27Vとで挟まれているので、上盤24に鉛直軸周りの強い外力が加わったり、望遠鏡部22に水平軸周りの強い外力が加わったりしても、その外力を押付装置27H,27Vによって吸収することができる。
【0051】
また、駆動モータ出力ねじ歯車2H,2Vと駆動力伝達ねじ歯車4H,4Vとを用いているので、駆動モータ1H,1Vの回転軸1aH,1aVを断続機構軸3H,3Vに対して直角にすることができ、これらの部分をコンパクトに纏めることができる。同様に、切替モータ出力ねじ歯車12H,12Vと切替軸ねじ歯車11H,11Vとを用いているので、断続切替モータ13H,13Vの回転軸13aH,13aVを断続切替軸9H,9Vに対して直角にすることができ、これらの部分をコンパクトに纏めることができる。
【0052】
なお、この実施形態では、断続切替モータ13H,13Vによって断続切替平歯車6H,6Vを回転させるようにしたが、手動によって直接或いは間接的に断続切替平歯車6H,6Vを回転させるようにしてもよい。
【0053】
また、この実施形態では動力伝達装置を測量機用部品として用いたが、測量機以外の装置に用いることができる。
【0054】
なお、必ずしも鋼球列7H,7Vを用いる必要はない。
【図面の簡単な説明】
【0055】
【図1】図1はこの発明の一実施形態に係る動力伝達装置の分解斜視図である。
【図2】図2は図1に示す動力伝達装置を備えた測量機の破断面を示す概念図である。
【図3】図3は図2のIII‐III線に沿う断面を示す概念図である。
【図4】図4は図3のIV‐IV線に沿う断面を示す概念図である。
【符号の説明】
【0056】
1H,1V:軸駆動モータ(駆動用電動機)、2H,2V:駆動モータ出力ねじ歯車(原動機側歯車)、3H,3V:断続機構軸(第1の軸)、3aH,3aV:雄ねじ、4H,4V:駆動力伝達ねじ歯車(第1の歯車)、4ah,4aV:一端面、5H,5V:駆動力伝達平歯車(第2の歯車)、5aH,5aV:一端面、6H,6V:断続切替平歯車(第3の歯車)、6aH,6aV:一端面、7H,7V:鋼球列(スラスト軸受)、8H,8V:軸平歯車(従動軸側歯車)、9H,9V:断続切替軸、10H,10V:切替軸平歯車(伝達歯車)、11H,11V:切替軸ねじ歯車、12H,12V:切替モータ出力ねじ歯車、13H,13V:断続切替モータ、22:望遠鏡部、22a:水平軸部(従動軸)、23g:鉛直軸部(従動軸)、30H,30V:支持部材、30aH,30aV:支持面。
【特許請求の範囲】
【請求項1】
相対的に回転可能に支持された従動軸に、同軸上に位置する独立回転可能な2つの第1、第2の歯車の端面間に生じる摩擦力を利用して駆動用電動機の回転力を任意に断続して伝達することを特徴とする動力伝達装置。
【請求項2】
前記第1の歯車は、第1の軸に回転可能に装着されて、前記駆動用電動機の回転力を伝達する原動軸側歯車と噛合し、
前記第2の歯車は、前記第1の軸に回転可能に装着され、前記従動軸に回転力を伝達する従動軸側歯車と噛合し、
前記第1の歯車の一端面を支持する支持部材が、前記第1の軸に設けられ、
前記第1の軸に雄ねじが形成され、
動力断続用電動機の回転力を伝達する伝達歯車と噛合し、この伝達歯車から所定方向の回転力が作用すると前記雄ねじに対して締結方向へ回転して、前記第2の歯車を前記第1の歯車に押圧し、前記第1、第2の歯車間の摩擦力を大きくし、前記伝達歯車から前記所定方向と反対方向の回転力が作用すると前記雄ねじに対して反締結方向へ回転して、前記第1、第2の歯車間の摩擦力を小さくする第3の歯車が、前記雄ねじに螺合し
ていることを特徴とする請求項1記載の動力伝達装置。
【請求項3】
前記第1の歯車の一端面と前記支持部材の支持面との間、前記第2の歯車の一端面と前記第3の歯車の一端面との間にそれぞれスラスト軸受が配置されていることを特徴とする請求項2記載の動力伝達装置。
【請求項4】
望遠鏡部を鉛直軸及び水平軸の少なくとも一方の軸周りへ回転させる前記駆動用電動機の回転力を請求項1から3のいずれか1項記載の動力伝達装置によって伝達することを特徴とする測量機。
【請求項1】
相対的に回転可能に支持された従動軸に、同軸上に位置する独立回転可能な2つの第1、第2の歯車の端面間に生じる摩擦力を利用して駆動用電動機の回転力を任意に断続して伝達することを特徴とする動力伝達装置。
【請求項2】
前記第1の歯車は、第1の軸に回転可能に装着されて、前記駆動用電動機の回転力を伝達する原動軸側歯車と噛合し、
前記第2の歯車は、前記第1の軸に回転可能に装着され、前記従動軸に回転力を伝達する従動軸側歯車と噛合し、
前記第1の歯車の一端面を支持する支持部材が、前記第1の軸に設けられ、
前記第1の軸に雄ねじが形成され、
動力断続用電動機の回転力を伝達する伝達歯車と噛合し、この伝達歯車から所定方向の回転力が作用すると前記雄ねじに対して締結方向へ回転して、前記第2の歯車を前記第1の歯車に押圧し、前記第1、第2の歯車間の摩擦力を大きくし、前記伝達歯車から前記所定方向と反対方向の回転力が作用すると前記雄ねじに対して反締結方向へ回転して、前記第1、第2の歯車間の摩擦力を小さくする第3の歯車が、前記雄ねじに螺合し
ていることを特徴とする請求項1記載の動力伝達装置。
【請求項3】
前記第1の歯車の一端面と前記支持部材の支持面との間、前記第2の歯車の一端面と前記第3の歯車の一端面との間にそれぞれスラスト軸受が配置されていることを特徴とする請求項2記載の動力伝達装置。
【請求項4】
望遠鏡部を鉛直軸及び水平軸の少なくとも一方の軸周りへ回転させる前記駆動用電動機の回転力を請求項1から3のいずれか1項記載の動力伝達装置によって伝達することを特徴とする測量機。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−16971(P2007−16971A)
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願番号】特願2005−201770(P2005−201770)
【出願日】平成17年7月11日(2005.7.11)
【出願人】(303047872)株式会社ニコン・トリンブル (10)
【Fターム(参考)】
【公開日】平成19年1月25日(2007.1.25)
【国際特許分類】
【出願日】平成17年7月11日(2005.7.11)
【出願人】(303047872)株式会社ニコン・トリンブル (10)
【Fターム(参考)】
[ Back to top ]