
動力伝達装置

【課題】無段変速機が搭載された車両において路面側から予期しない慣性力が無段変速機に入力するときもベルトのスリップを防止するようにした動力伝達装置を提供する。
【解決手段】車両に搭載される駆動源(エンジン)に接続されるドライブ・ドリブンプーリとベルトからなるCVTとそれと直列に配置されるクラッチ28aを備えた動力伝達装置において、駆動源から駆動軸に入力される駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定し(S200)、駆動輪から駆動軸に入力される駆動源の出力トルクと慣性トルクとからなる入力トルクと予め設定されたベルトの摩擦係数(ベルト下限μ)に基づいてベルト伝達トルクを算出すると共に、上記走行状態にあるとき、クラッチの伝達トルクが入力トルク以上でベルト伝達トルク未満の値となるようにクラッチの伝達トルクを制御する(S202からS214)。
【解決手段】車両に搭載される駆動源(エンジン)に接続されるドライブ・ドリブンプーリとベルトからなるCVTとそれと直列に配置されるクラッチ28aを備えた動力伝達装置において、駆動源から駆動軸に入力される駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定し(S200)、駆動輪から駆動軸に入力される駆動源の出力トルクと慣性トルクとからなる入力トルクと予め設定されたベルトの摩擦係数(ベルト下限μ)に基づいてベルト伝達トルクを算出すると共に、上記走行状態にあるとき、クラッチの伝達トルクが入力トルク以上でベルト伝達トルク未満の値となるようにクラッチの伝達トルクを制御する(S202からS214)。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は動力伝達装置に関し、より具体的には無段変速機とクラッチを備えた、車両用の動力伝達装置に関する。
【背景技術】
【0002】
車両が走行時に急ブレーキ(パニックブレーキ)されるなどして急減速させられたとき、駆動軸上の回転が急減し、駆動輪(路面)側から作用する慣性力が急速に増大する。車両に搭載される変速機が無段変速機であると、この慣性力が無段変速機に過大な負荷として作用する。
【0003】
そこで、特許文献1記載の技術において急減速状態が検出されたとき、無段変速機の油圧アクチュエータに供給される調整ライン圧を基準値よりも低下させてベルトを意図的にスリップさせる(滑らせる)ことが提案されている。
【0004】
また、駆動源と駆動輪の間に無段変速機と直列に油圧作動の湿式クラッチを配置し、無段変速機に予期しない負荷が入力されるとき、クラッチをスリップさせてベルトのスリップを回避する、いわゆるクラッチをトルクヒューズとして機能させる技術も良く知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平6−76824号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の技術は上記のように構成することでベルトの破損を防止しているが、ベルトをスリップさせることは耐久性の点で望ましくない。その点でクラッチをスリップさせることでベルトのスリップを回避するトルクヒューズ技術は効果的であるが、どのような負荷にも対応可能にするにはクラッチの係合圧を十分に大きく設定しておく必要があり、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招いてしまう。
【0007】
従って、この発明の目的は上記した不都合を解消し、無段変速機が搭載された車両において路面側から予期しない慣性力が無段変速機に入力するときもベルトのスリップを防止するようにした動力伝達装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1にあっては、車両に搭載される駆動源に接続される駆動プーリと駆動輪に接続される従動プーリと前記駆動プーリと前記従動プーリに巻回されるベルトとからなる無段変速機と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチとを備えた動力伝達装置において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段と、前記駆動プーリに入力される前記駆動源の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段と、少なくとも前記算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段と、前記算出された入力トルクに基づいて前記クラッチの伝達トルクを算出して制御するクラッチ伝達トルク制御手段とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルトの伝達トルク未満の値となるように前記クラッチ伝達トルクを制御する如く構成した。
【0009】
請求項2に係る動力伝達装置にあっては、前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段を備える如く構成した。
【0010】
請求項3に係る動力伝達装置にあっては、前記予め設定された前記ベルトの摩擦係数が、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記無段変速機の制御に使用されるパラメータから検索自在に設定された値からなる如く構成した。
【0011】
請求項4に係る動力伝達装置にあっては、前記クラッチが、前記駆動源と前記無段変速機の間に配置される如く構成した。
【発明の効果】
【0012】
請求項1に係る動力伝達装置にあっては、駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定し、駆動プーリに入力される駆動源の出力トルクと慣性トルクとからなる入力トルクを算出し、少なくとも算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて無段変速機のベルトの伝達トルクを算出し、算出された入力トルクに基づいて無段変速機と直列に配置されるクラッチの伝達トルクを算出して制御すると共に、前記走行状態にあると判定されるとき、クラッチの伝達トルクが算出された入力トルク以上で算出されたベルトの伝達トルク未満の値となるようにクラッチ伝達トルクを制御する如く構成したので、急減速時などに路面側から予期しない慣性力が無段変速機に入力するときも、クラッチを先ずスリップさせることができてベルトのスリップを防止することができる。
【0013】
即ち、クラッチの伝達トルクが入力トルク以上でベルトの伝達トルク未満の値となるように制御するので、クラッチの伝達トルクをベルトの伝達トルク未満の値に制御することによってベルトに作用する予期しない慣性力をクラッチのスリップで吸収することができ、ベルトのスリップを防止することができる。また、入力トルク以上の値に制御することで加速時にも必要な加速感を与えることができる。
【0014】
さらに、クラッチの伝達トルクをベルトの伝達トルク未満の値に制御することは、換言すればクラッチの係合圧を大きく設定する必要がないことを意味するので、油圧エネルギが増大することがなく、よってポンプ負荷の増加による燃費の悪化を招くこともない。
【0015】
請求項2に係る動力伝達装置にあっては、クラッチの摩擦係数をクラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行する手段を備える如く構成したので、上記した効果に加え、クラッチをスリップさせつつ学習することで学習の間もクラッチをスリップさせることができ、よってクラッチの伝達トルクの制御精度の向上とベルトの保護とを両立させることができる。
【0016】
請求項3に係る動力伝達装置にあっては、予め設定されたベルトの摩擦係数が、ベルトが所定期間使用されたときに計測して得られる摩擦係数を無段変速機の制御に使用されるパラメータから検索自在に設定された値からなる如く構成したので、上記した効果に加え、予め設定されたベルトの摩擦係数を例えばベルトが劣化した下限付近で摩擦係数のばらつきを吸収できるような値に設定することで、その値を無段変速機の制御を反映できるように求めることができ、よってベルトの伝達トルクを適正に算出することができる。
【0017】
請求項4に係る動力伝達装置にあっては、クラッチが、駆動源と無段変速機の間に配置される如く構成したので、上記した効果に加え、駆動源の出力トルクが減少方向に変化する急減速時などの走行状態において駆動輪に駆動軸を介して接続される従動プーリからのトルクと駆動源からの入力トルクとがベルトに同時に作用しようとするとき、駆動源と無段変速機の間に配置されるクラッチをスリップさせることで、駆動源からベルトへのトルクの入力を防止でき、よってベルトのスリップを一層確実に防止することができる。
【図面の簡単な説明】
【0018】
【図1】この発明の実施例に係る動力伝達装置を全体的に示す概略図である。
【図2】図1に示す変速機油圧供給機構の油圧回路図である。
【図3】図1に示すシフトコントローラの動作を機能的に示すブロック図である。
【図4】図3に示す装置の動作のうちのクラッチ伝達トルク算出手段の動作を示すフロー・チャートである。
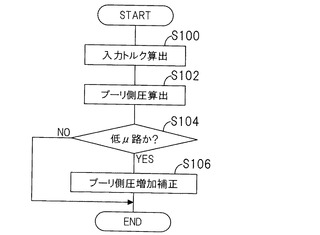
【図5】図3に示す装置の動作のうちのプーリ側圧制御手段の動作を示すフロー・チャートである。
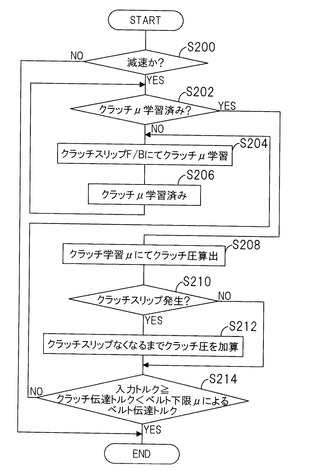
【図6】図3に示す装置の動作のうちのクラッチ伝達トルク制御手段の動作を示すフロー・チャートである。
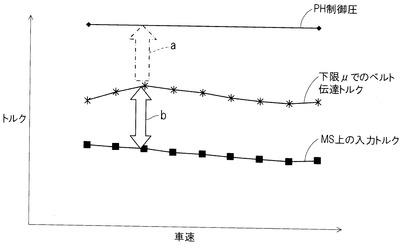
【図7】図1に示す動力伝達装置の車速に対するトルクの制御特性を示す説明図である。
【発明を実施するための形態】
【0019】
以下、添付図面に即してこの発明に係る動力伝達装置を実施するための形態を説明する。
【実施例】
【0020】
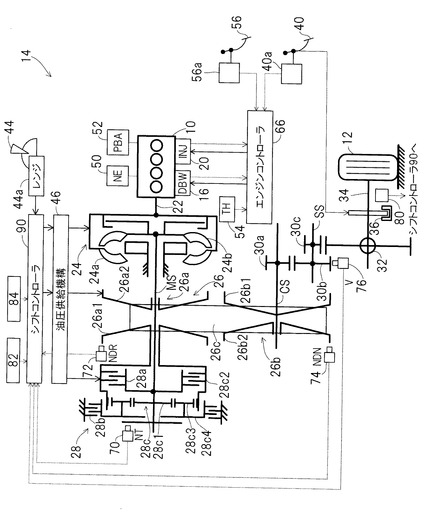
図1は、この発明の実施例に係る動力伝達装置を全体的に示す概略図、図2は図1に示す油圧供給機構の油圧回路図である。
【0021】
図1において、符号10はエンジン(内燃機関(駆動源))を示す。エンジン10は駆動輪12を備えた車両14に搭載される(車両14は駆動輪12などで部分的に示す)。
【0022】
エンジン10の吸気系に配置されたスロットルバルブ(図示せず)は車両運転席床面に配置されるアクセルペダルとの機械的な接続が絶たれ電動モータなどのアクチュエータからなるDBW(Drive By Wire)機構16に接続され、DBW機構16で開閉される。
【0023】
スロットルバルブで調量された吸気はインテークマニホルド(図示せず)を通って流れ、各気筒の吸気ポート付近でインジェクタ20から噴射された燃料と混合して混合気を形成し、吸気バルブ(図示せず)が開弁されたとき、当該気筒の燃焼室(図示せず)に流入する。燃焼室において混合気は点火されて燃焼し、ピストンを駆動してクランクシャフト22を回転させた後、排気となってエンジン10の外部に放出される。
【0024】
クランクシャフト22の回転はトルクコンバータ24を介して無段変速機(Continuous Variable Transmission。以下「CVT」という)26に入力される。
【0025】
即ち、クランクシャフト22はトルクコンバータ24のポンプ・インペラ24aに接続される一方、それに対向配置されて流体(作動油)を収受するタービン・ランナ24bはメインシャフト(入力軸)MSに接続される。
【0026】
CVT26はメインシャフトMS、より正確にはその外周側シャフトに配置されたドライブプーリ26aと、メインシャフトMSに平行なカウンタシャフト(出力軸)CS、より正確にはその外周側シャフトに配置されたドリブンプーリ26bと、その間に掛け回される無端可撓部材からなる動力伝達要素、例えば金属製のベルト26cからなる。
【0027】
ドライブプーリ26aは、メインシャフトMSの外周側シャフトに相対回転不能で軸方向移動不能に配置された固定プーリ半体26a1と、メインシャフトMSの外周側シャフトに相対回転不能で固定プーリ半体26a1に対して軸方向に相対移動可能な可動プーリ半体26a2からなる。
【0028】
ドリブンプーリ26bは、カウンタシャフトCSの外周側シャフトに相対回転不能で軸方向移動不能に配置された固定プーリ半体26b1と、カウンタシャフトCSに相対回転不能で固定プーリ半体26b1に対して軸方向に相対移動可能な可動プーリ半体26b2からなる。
【0029】
CVT26は前後進切換機構28を介してエンジン10に接続される。前後進切換機構28は、車両14の前進方向への走行を可能にする前進クラッチ28aと、後進方向への走行を可能にする後進ブレーキクラッチ28bと、その間に配置されるプラネタリギヤ機構28cからなる。CVT26はエンジン10に前進クラッチ28aを介して接続される。
【0030】
前進クラッチ28aと後進ブレーキクラッチ28bが、より具体的には主として前進クラッチ28aが前記したトルクヒューズのクラッチとして機能する。以下、前進クラッチ28aを単に「クラッチ」という。
【0031】
プラネタリギヤ機構28cにおいて、サンギヤ28c1はメインシャフトMSに固定されると共に、リングギヤ28c2は前進クラッチ28aを介してドライブプーリ26aの固定プーリ半体26a1に固定される。
【0032】
サンギヤ28c1とリングギヤ28c2の間には、ピニオン28c3が配置される。ピニオン28c3は、キャリア28c4でサンギヤ28c1に連結される。キャリア28c4は、後進ブレーキクラッチ28bが作動させられると、それによって固定(ロック)される。
【0033】
カウンタシャフトCSの回転はギヤを介してセカンダリシャフト(中間軸)SSから駆動輪12に伝えられる。即ち、カウンタシャフトCSの回転はギヤ30a,30bを介してセカンダリシャフトSSに伝えられ、その回転はギヤ30cを介してディファレンシャル32からドライブシャフト(駆動軸)34を介して左右の駆動輪(右側のみ示す)12に伝えられる。
【0034】
駆動輪(前輪)12と従動輪(後輪。図示せず)からなる4個の車輪の付近にはディスクブレーキ36が配置されると共に、車両運転席床面にはブレーキペダル40が配置される。
【0035】
前後進切換機構28において前進クラッチ28aと後進ブレーキクラッチ28bの切換は、車両運転席に設けられたレンジセレクタ44を運転者が操作して例えばP,R,N,Dなどのレンジのいずれかを選択することで行われる。運転者のレンジセレクタ44の操作によるレンジ選択は油圧供給機構46(後述)のマニュアルバルブに伝えられる。
【0036】
レンジセレクタ44を介して例えばD,S,Lレンジが選択されると、それに応じてマニュアルバルブのスプールが移動し、後進ブレーキクラッチ28bのピストン室から作動油(油圧)が排出される一方、前進クラッチ28aのピストン室に油圧が供給されて前進クラッチ28aが締結される。
【0037】
前進クラッチ28aが締結されると、全ギヤがメインシャフトMSと一体に回転し、ドライブプーリ26aはメインシャフトMSと同方向(前進方向)に駆動され、よって車両14は前進方向に走行する。
【0038】
Rレンジが選択されると、前進クラッチ28aのピストン室から作動油が排出される一方、後進ブレーキクラッチ28bのピストン室に油圧が供給されて後進ブレーキクラッチ28bが作動する。従ってキャリア28c4が固定されてリングギヤ28c2はサンギヤ28c1とは逆方向に駆動され、ドライブプーリ26aはメインシャフトMSとは逆方向(後進方向)に駆動され、車両14は後進方向に走行する。
【0039】
PあるいはNレンジが選択されると、両方のピストン室から作動油が排出されて前進クラッチ28aと後進ブレーキクラッチ28bが共に開放され、前後進切換機構28を介しての動力伝達が断たれ、エンジン10とCVT26のドライブプーリ26aとの間の動力伝達が遮断される。
【0040】
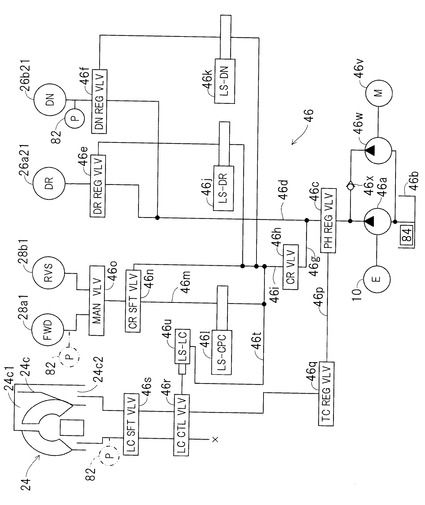
図2は油圧供給機構46の油圧回路図である。
【0041】
図示の如く、油圧供給機構46には油圧ポンプ46aが設けられる。油圧ポンプ46aはギヤポンプからなり、エンジン(E)10によって駆動され、リザーバ46bに貯留された作動油を汲み上げてPH制御バルブ(PH REG VLV)46cに圧送する。
【0042】
PH制御バルブ46cの出力(PH圧(ライン圧))は、一方では油路46dから第1、第2のレギュレータバルブ(DR REG VLV, DN REG VLV)46e,46fを介してCVT26のドライブプーリ26aの可動プーリ半体26a2のピストン室(DR)26a21とドリブンプーリ26bの可動プーリ半体26b2のピストン室(DN)26b21に接続されると共に、他方では油路46gを介してCRバルブ(CR VLV)46hに接続される。
【0043】
CRバルブ46hはPH圧を減圧してCR圧(制御圧)を生成し、油路46iから第1、第2、第3の(電磁)リニアソレノイドバルブ46j,46k,46l(LS-DR, LS-DN, LS-CPC)に供給する。
【0044】
第1、第2のリニアソレノイドバルブ46j,46kはそのソレノイドの励磁に応じて決定される出力圧を第1、第2のレギュレータバルブ46e,46fに作用させ、よって油路46dから送られるPH圧の作動油を可動プーリ半体26a2,26b2のピストン室26a21,26b21に供給し、それに応じてプーリ側圧を発生させる。
【0045】
従って、可動プーリ半体26a2,26b2を軸方向に移動させるプーリ側圧が発生させられてドライブプーリ26aとドリブンプーリ26bのプーリ幅が変化し、ベルト26cの巻掛け半径が変化する。このように、プーリの側圧を調整することで、エンジン10の出力を駆動輪12に伝達するレシオ(変速比)を無段階に変化させることができる。
【0046】
CRバルブ46hの出力(CR圧)は油路46mを介してCRシフトバルブ(CR SFT VLV)46nにも接続され、そこから前記したマニュアルバルブ(MAN VLV。符号46oで示す)を介して前後進切換機構28の前進クラッチ28aのピストン室(FWD)28a1と後進ブレーキクラッチ28bのピストン室(RVS)28b1に接続される。
【0047】
マニュアルバルブ46oは、前記した如く、運転者によって操作(選択)されたレンジセレクタ44の位置に応じてCRシフトバルブ46nの出力を前進クラッチ28aと後進ブレーキクラッチ28bのピストン室28a1,28b1のいずれかに接続する。
【0048】
また、PH制御バルブ46cの出力は、油路46pを介してTCレギュレータバルブ(TC REG VLV)46qに送られ、TCレギュレータバルブ46qの出力はLCコントロールバルブ(LC CTL VLV)46rを介してLCシフトバルブ(LC SFT VLV)46sに接続される。
【0049】
LCシフトバルブ46sの出力は一方ではトルクコンバータ24のロックアップクラッチ24cのピストン室24c1に接続されると共に、他方ではその背面側の室24c2に接続される。
【0050】
LCシフトバルブ46sを介して作動油がピストン室24c1に供給される一方、背面側の室24c2から排出されると、ロックアップクラッチ24cが係合(オン)され、背面側の室24c2に供給される一方、ピストン室24c1から排出されると、解放(オフ)される。ロックアップクラッチ24cのスリップ量は、ピストン室24c1と背面側の室24c2に供給される作動油の量によって決定される。
【0051】
CRバルブ46hの出力は油路46tを介してLCコントロールバルブ46rとLCシフトバルブ46sに接続されると共に、油路46tには第4のリニアソレノイドバルブ(LS−LC)46uが介挿される。ロックアップクラッチ24cのスリップ量は、第4のリニアソレノイドバルブ46uのソレノイドの励磁・非励磁によって調整(制御)される。
【0052】
さらに、油圧ポンプ46aの下流でPH制御バルブ46cの上流に相当する位置には電動モータ46vに接続されるEOP(Electric Oil Pump。電動油圧ポンプ)46wがチェックバルブ46xを介して接続される。
【0053】
EOP46wも油圧ポンプ46aと同様にギヤポンプからなり、電動モータ46vで駆動され、リザーバ46bに貯留された作動油を汲み上げてPH制御バルブ(PH REG VLV)46cに圧送する。
【0054】
この明細書において動力伝達装置(符号48で示す)は、トルクコンバータ24とCVT26と前後進切換機構28とからなる。
【0055】
図1の説明に戻ると、エンジン10のカム軸(図示せず)付近などの適宜位置にはクランク角センサ50が設けられ、ピストンの所定クランク角度位置ごとにエンジン回転数NEを示す信号を出力する。吸気系においてスロットルバルブの下流の適宜位置には絶対圧センサ52が設けられ、吸気管内絶対圧(エンジン負荷)PBAに比例した信号を出力する。
【0056】
DBW機構16のアクチュエータにはスロットル開度センサ54が設けられ、アクチュエータの回転量を通じてスロットルバルブの開度THに比例した信号を出力する。
【0057】
また前記したアクセルペダル(符号56で示す)の付近にはアクセル開度センサ56aが設けられて運転者のアクセルペダル操作量に相当するアクセル開度APに比例する信号を出力すると共に、ブレーキペダル40の付近にはブレーキスイッチ40aが設けられて運転者のブレーキペダル40の操作に応じてオン信号を出力する。
【0058】
さらに、エンジン10の冷却水通路(図示せず)の付近には水温センサ(図示せず)が設けられ、エンジン冷却水温TW、換言すればエンジン10の温度に応じた出力を生じる。
【0059】
上記したクランク角センサ50などの出力は、エンジンコントローラ66に送られる。エンジンコントローラ66はCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備え、それらセンサ出力に基づいて目標スロットル開度を決定してDBW機構16の動作を制御すると共に、燃料噴射量を決定してインジェクタ20を駆動する。
【0060】
メインシャフトMSにはNTセンサ(回転数センサ)70が設けられ、タービン・ランナ24bの回転数、具体的にはメインシャフトMSの回転数NT、より具体的には変速機入力軸回転数(と前進クラッチ28aの入力軸回転数)を示すパルス信号を出力する。
【0061】
CVT26のドライブプーリ26aの付近の適宜位置にはNDRセンサ(回転数センサ)72が設けられてドライブプーリ26aの回転数NDR、換言すれば前進クラッチ28aの出力軸回転数に応じたパルス信号を出力する。
【0062】
ドリブンプーリ26bの付近の適宜位置にはNDNセンサ(回転数センサ)74が設けられてドリブンプーリ26bの回転数NDN、具体的にはカウンタシャフトCSの回転数、より具体的には変速機出力軸回転数を示すパルス信号を出力する。
【0063】
またセカンダリシャフトSSのギヤ30bの付近にはVセンサ(回転数センサ)76が設けられてセカンダリシャフトSSの回転数と回転方向を示すパルス信号(具体的には車速Vを示すパルス信号)を出力する。駆動輪12と従動輪(図示せず)からなる4個の車輪の付近にはそれぞれ車輪速センサ80が設けられ、車輪の回転速度を示す車輪速に比例するパスル信号を出力する。
【0064】
図1の説明に戻ると、前記したレンジセレクタ44の付近にはレンジセレクタスイッチ44aが設けられ、運転者によって選択されたR,N,Dなどのレンジに応じた信号を出力する。
【0065】
図2に示す如く、油圧供給機構46においてCVT26のドリブンプーリ26bに通じる油路には油圧センサ82が配置されてドリブンプーリ26bの可動プーリ半体26b2のピストン室26b21に供給される油圧に応じた信号を出力する。リザーバ46bには油温センサ84が配置されて油温(作動油ATFの温度TATF)に応じた信号を出力する。
【0066】
上記したNTセンサ70などの出力は、図示しないその他のセンサの出力も含め、シフトコントローラ90に送られる。シフトコントローラ90もCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備えると共に、エンジンコントローラ66と通信自在に構成される。
【0067】
シフトコントローラ90は、それら検出値に基づき、油圧供給機構46の第4のリニアソレノイドバルブ46uなどの電磁ソレノイドを励磁・非励磁して前後進切換機構28とCVT26とトルクコンバータ24の動作を制御すると共に、油圧供給機構46の電動モータ46vに通電してEOP46wの動作を制御する。
【0068】
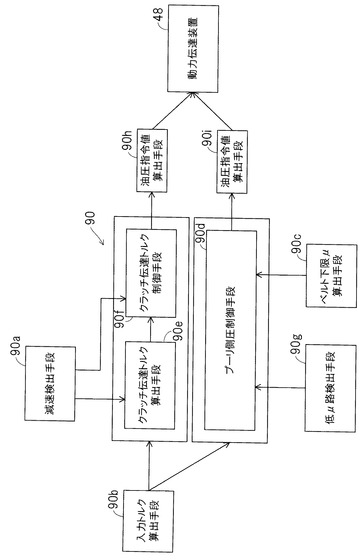
図3はシフトコントローラ90の上記した動作のうち、最初に述べたCVT26のベルト26cのスリップ防止動作を機能的に示すブロック図である。
【0069】
図示の如く、シフトコントローラ90は、車両14が減速しているか、換言すればエンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する減速検出手段(走行状態判定手段)90aと、エンジン10からメインシャフトMSを介してCVT26のドライブプーリ26aに入力されるエンジン10の出力トルクと慣性トルクとからなる入力を算出する入力トルク算出手段90bと、ベルト下限μ、即ち、予め設定されたベルト26cの摩擦係数μを算出するベルト下限μ算出手段90cと、少なくとも算出された入力トルクと下限μとに基づいてプーリ側圧、即ち、ベルト26cの伝達トルクを算出するプーリ側圧制御手段(ベルト伝達トルク算出手段)90dと、算出された入力トルクに基づいてクラッチ(前進クラッチ)28aの伝達トルクを算出するクラッチ伝達トルク算出手段90eと、クラッチ伝達トルク算出手段90eの出力に基づいてクラッチ28aの伝達トルクを制御するクラッチ伝達トルク制御手段90fとを備える。
【0070】
さらに、低μ路、即ち、車両14が走行する走行路のうち、路面の摩擦係数μが低い走行路面か否か検出する低μ路検出手段90gを備える。低μ路検出手段90gの出力はプーリ側圧制御手段90dに送られる。
【0071】
クラッチ伝達トルク制御手段90fとプーリ側圧制御手段90dの出力はそれぞれ油圧指令値算出手段90h,90iに送られ、そこで算出された指令値に基づいて動力伝達装置48の動作が制御される。
【0072】
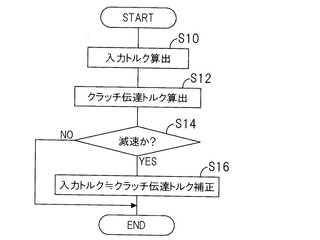
図4は上記したクラッチ伝達トルク算出手段の動作を詳細に示すフロー・チャートである。
【0073】
以下説明すると、S10において入力トルクを算出する。入力トルクはメインシャフトMSを介してCVT26のドライブプーリ26aに入力される、エンジン10の出力トルクと慣性トルクとからなる入力トルクを意味し、S10の処理は図3の入力トルク算出手段90bの算出値を読み込むことで行われる。
【0074】
エンジン10の出力トルクは、エンジン回転数NEと吸気管内絶対圧PBAからマップ検索して得られるエンジントルクにトルクコンバータ24の増幅率を乗じて算出される。
【0075】
慣性トルクは、以下の式から算出される。
慣性トルク={(Ie+Itbn+Idr)/(Ie+Itbn+Idr+Idn)}×最大ブレーキトルク
【0076】
上記で:Ie:エンジン10の慣性トルク、Itbn:トルクコンバータ24のタービン・ランナ24bの慣性トルク、Idr:CVT26のドライブプーリ26aの慣性トルク、Idn:そのドリブンプーリ26bの慣性トルクである。上記した慣性トルクと最大ブレーキトルクの値は予め実験で求められる固定値である。
【0077】
次いでS12において算出された入力トルクに基づいてクラッチ28aの伝達トルクを算出する。クラッチの伝達トルクは算出された入力トルクに適宜な係数を乗じることで算出する。S12の処理は図3のクラッチ伝達トルク算出手段90eの算出値を読み込むことで行われる。
【0078】
次いでS14に進み、車両14が減速、換言すればエンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する。S14の処理は図3の減速検出手段90aの出力を読み込むことで行われる。
【0079】
減速検出手段90aは具体的にはエンジンコントローラ66にアクセスし、エンジン10がフューエルカット(燃料供給停止)されているか否か判断し、肯定されるとき車両14が減速と判定する。エンジンコントローラ66は、アクセルペダル22が踏まれず、エンジン回転数NEが所定値以上のとき、エンジン10への燃料噴射量の供給を停止(フューエルカット)する。
【0080】
S14で否定されるときは以降の処理をスキップする一方、肯定されるときはS16に進み、S12において算出されたクラッチ伝達トルクが入力トルクとほぼ等しくなるように、即ち、同一の値か近傍の値となるように補正する。これについては後述する。
【0081】
図5は上記したプーリ側圧制御手段の動作を詳細に示すフロー・チャートである。
【0082】
以下説明すると、S100において図4フロー・チャートのS10と同様に入力トルクを算出し、S102においてCVT26のドライブプーリ26aとドリブンプーリ26bに供給すべきプーリ側圧(油圧制御値)を算出する。
【0083】
即ち、先ずドライブプーリ26aとドリブンプーリ26bのうちの低圧側について上記した入力トルクと実レシオに基づいてベルト26cがスリップしない程度の力で押圧する必要側圧を算出する。
【0084】
また高圧側について(Vセンサ76とアクセル開度センサ56aから検出される)車速Vとアクセル開度APから検索される目標エンジン回転数(具体的にはドライブプーリ26aの回転数NDRで規定される回転数)が実現されるべく設定される目標レシオが保持されるように側圧比を算出する。
【0085】
次いで必要側圧に算出された側圧比を乗じて両者の積を求め、求めた積に実レシオ(NDRセンサ72とNDNセンサ74の検出値の比)と目標レシオの偏差が減少するように演算されるF/B項を加算し、よって得た和をプーリ側圧とすることで算出する。
【0086】
次いでS104に進み、現在車両14が走行している走行路が路面摩擦係数μの値が低い低μ路か否か判断する。これは低μ路検出手段90gの出力を読み込むことで判断する。
【0087】
低μ路検出手段90gは、車輪速センサ80の出力から4個の車輪の車両前後方向の滑り比と左右方向の滑り比を算出し、そのいずれかが所定範囲内にないとき、車両14が低μ路を走行していると判断する。
【0088】
S104で否定されるときは以降の処理をスキップする一方、肯定されるときはS106に進み、プーリ側圧を増加補正する。この補正は具体的には、必要側圧の算出に使用される入力トルクに適宜な係数を乗じて入力トルクを増加することで、プーリ側圧を増加補正する。この処理は、車輪ロックに対応するためである。
【0089】
図6は上記したクラッチ伝達トルク制御手段の動作を詳細に示すフロー・チャートである。
【0090】
先ずS200において車両14が減速か、即ち、エンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する。この処理はS14と同様、図3の減速検出手段90aの出力を読み込むことで行われる。
【0091】
S200で否定されるときは以降の処理をスキップする一方、肯定されるときはS202に進み、クラッチμ、即ち、クラッチ28aの摩擦係数μ(後述)が学習済みか否か判断する。
【0092】
S202で否定されるときはS204に進み、クラッチスリップF/B制御を介してクラッチμを学習し、S206に進み、クラッチμ学習済みと判定してS202に戻る一方、S202で肯定されるときはS208に進み、クラッチ学習μで(学習された摩擦係数μを用いて)クラッチ圧を算出する。
【0093】
次いでS210に進み、クラッチ28aにスリップ(滑り)が発生したか否か判断し、肯定されるときはS212に進み、クラッチ28aのスリップがなくなるまでクラッチ圧を加算する。尚、S210で否定されるときはS212をスキップする。
【0094】
S202からS212までの処理を説明すると、この実施例はクラッチ28aをスリップさせることによってCVT26のベルト26cのスリップを回避させることから、クラッチ28aのスリップ量は大きな値に設定するのが望ましい。他方、そうすると、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招く。
【0095】
そこで、車両14が減速と判断されるときは、クラッチ28aを微小にスリップさせるようにF/B制御してクラッチ28aのクラッチ圧を精度良く算出し、それに基づいてクラッチ伝達トルクを算出・制御するようにした。
【0096】
クラッチ28aのクラッチ圧は以下のように算出される。
クラッチ圧=入力トルク/(摩擦係数μ×クラッチピストン面積×クラッチ面数×クラッチ有効径)
上記で、入力トルクは図4フロー・チャートのS10で算出される値である。クラッチピストン面積、クラッチ面数、クラッチ有効径はクラッチ28aのピストン室28a1の面積、面(プレート)の数、有効径を示し、全て既知の値(固定値)である。
【0097】
S208の処理においてはクラッチ28aの摩擦係数μとして例えば低μ路走行用の比較的低い値を初期値として用いて上式に基づいてクラッチ圧(クラッチ制御油圧)を算出すると共に、S202からS206の処理で摩擦係数μの学習値が得られるときはその最新の学習値に基づいてクラッチ圧を算出し、図2に示すCRシフトバルブ46nなどの動作を制御してクラッチ28aに作動圧(油圧)を供給する。
【0098】
学習制御においてS204ではクラッチ28aのスリップ率(NTセンサ70とNDRセンサ72から検出)が例えば1%となるように摩擦係数μの前回値と今回値の加重平均値を算出して摩擦係数μを学習する。
【0099】
尚、S202からS206の学習制御の間はクラッチ28aが既にスリップさせられているので、CVT26のベルト26cのスリップは生じることがない。
【0100】
次いでS214に進み、S212で加算されたクラッチ圧を適宜な油圧―トルク変換係数を用いてクラッチ伝達トルクに算出すると共に、ベルト下限μによるベルト伝達トルクを求め、求めたクラッチ伝達トルクが(図4フロー・チャートのS10で算出される)入力トルク以上で、算出されたベルト伝達トルク未満か否か判断する。
【0101】
ベルト下限μは予め設定されたCVT26のベルト26cの摩擦係数を意味する。この値は具体的には、ベルト26cが所定期間使用されたときに計測して得られる摩擦係数をCVT26の制御に使用されるパラメータ、より具体的には前記した目標エンジン回転数(正確にはドライブプーリ26aの回転数NDRで規定される回転数)と実レシオから検索自在にマップ値として予め設定されてシフトコントローラ90のROMに格納される。
【0102】
またベルト伝達トルクはCVT26のベルト26cによって伝達されるトルクを意味し、具体的には図5フロー・チャートのS102で算出されるプーリ側圧(油圧制御値)を適宜な油圧―トルク変換係数を介してトルク値に変換された値を意味する。
【0103】
従って、S214にあっては、(図4フロー・チャートのS10で算出される)入力トルクと実レシオから必要側圧(油圧)を算出し、算出された必要側圧を、(目標エンジン回転数と実レシオから)マップ検索して得られる下限μと適宜な油圧―トルク変換係数を用いてトルク値に変換して下限μによるベルト伝達トルクを算出する。
【0104】
このS214の判断で否定されるときはS204に戻り、S214で肯定されるまで、上記した学習制御を繰り返しつつ、クラッチ28aがスリップしないクラッチ圧を算出(加算)する。
【0105】
図6フロー・チャートの上記した処理を繰り返すことにより、図3ブロック図の油圧指令値算出手段90h,90iによってクラッチ伝達トルクが入力トルク以上でベルト下限μによるベルト伝達トルク未満の値となるように制御される。
【0106】
これについて図7を参照して説明する。同図は動力伝達装置48の車速に対するトルクの制御特性を示す説明図である。
【0107】
同図において縦軸はトルクを示し、図中の最下位の特性は、メインシャフトMS上の(ドライブプーリ26aに入力される)入力トルク(図4フロー・チャートのS10で算出)、中位の特性はベルト下限μによるベルト伝達トルク(図6フロー・チャートのS214で算出)、最上位の特性はPH圧(図2のPH制御バルブ46cの出力油圧)を示す。
【0108】
もし、クラッチ伝達トルクが同図に矢印(想像線)aで示す如く、ベルト伝達トルクより上になるように制御されると仮定すると、車両14が走行時に急ブレーキ(パニックブレーキ)されるなどして急減速させられたとき、ドライブシャフト34上の回転が急減し、駆動輪12(路面)側から作用する慣性力が急速に増大し、CVTに過大な負荷として作用する。
【0109】
その場合、特許文献1でライン圧を基準値よりも低下させてベルト26cを意図的にスリップさせることが提案されているが、ベルト26cをスリップさせることは耐久性の点で望ましくない。
【0110】
その点でクラッチ28aをスリップさせてベルト26cのスリップを回避するトルクヒューズ技術は効果的であるが、どのような負荷にも対応可能にするにはクラッチ28aの係合圧を十分に大きく設定しておく必要があり、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招いてしまう。
【0111】
従って、この実施例においては、同図に矢印(実線)bで示す如く、車両14が減速されたとき、ベルト下限μによるベルト伝達トルクを求め、クラッチ伝達トルクが求めたベルト伝達トルク未満となるように制御する如く構成した。これにより、CVT26が搭載された車両14において路面側から予期しない慣性力がCVT26に入力するときもベルト26cのスリップを防止することができる。
【0112】
即ち、プーリ側圧は入力トルクと実レシオから算出されることから、(低μ路を走行している場合を除くと)ベルト26cが新品であっても劣化していても、同一の値に算出されるが、上記のようにベルト下限μを検索して(プーリ側圧を決定するのに用いられる)ベルト伝達トルクを求めることで、ベルト26cの劣化度合いに応じたプーリ側圧(およびそれから算出されるベルト伝達トルク)を求めることができる。
【0113】
さらに、図4フロー・チャートに示す如く、減速時にないときは入力トルクに適宜な係数を乗じて算出されるクラッチ伝達トルクに制御、換言すれば入力トルク<クラッチ伝達トルクとなるように制御されるので、加速時などに必要な加速感を与えることができる。
【0114】
また、減速時は入力トルク≦クラッチ伝達トルク<ベルト下限μによるベルト伝達トルクとなるように制御することで、クラッチ28aをスリップさせ易くできる。即ち、急減速でのブレーキトルクが駆動輪12から入力されたとき、エンジン10からの入力トルク以上にクラッチ伝達トルクをしておくことでクラッチ28aをスリップさせ易くできる。また、クラッチ伝達トルクに対応するプーリ側圧(油圧)も低くて済むことから、油圧エネルギの増大(燃費の増加)も回避することができる。
【0115】
さらに、ベルト下限μを目標エンジン回転数と実レシオから検索自在とすることで、ベルト伝達トルクをベルト26cの実際の作動状態に即応して算出することができる。
【0116】
上記した如く、この実施例にあっては、車両14に搭載されるエンジン(駆動源)10に接続されるドライブプーリ(駆動プーリ)26aと駆動輪12に接続されるドリブンプーリ(従動プーリ)26bと前記ドライブプーリと前記ドリブンプーリに巻回されるベルト26cとからなるCVT(無段変速機)26と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチ(前進クラッチ28aと後進ブレーキクラッチ28b、特に前進クラッチ28a)とを備えた動力伝達装置48において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段(シフトコントローラ90,S14,S200)と、前記ドライブプーリ26a、より具体的にはメインシャフトMSを介してドライブプーリ26aに入力される前記エンジン10の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段(シフトコントローラ90,S10)と、少なくとも前記算出された入力トルクと予め設定された前記ベルト26cの摩擦係数(ベルト下限μ)とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段(シフトコントローラ90,S214)と、前記算出された入力トルクに基づいて前記クラッチの伝達トルク(クラッチ伝達トルク)を算出して制御するクラッチ伝達トルク制御手段(シフトコントローラ90,S202からS214、油圧指令値算出手段段90h,90i)とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルク(クラッチ伝達トルク)が前記算出された入力トルク以上で前記算出されたベルト26cの伝達トルク(ベルト下限μによるベルト伝達トルク)未満の値となるように前記クラッチ伝達トルクを制御する如く構成したので、急減速時などに路面側から予期しない慣性力がCVT26に入力するときも、クラッチ28aを先ずスリップさせることができるので、ベルト26cのスリップを防止することができる。
【0117】
即ち、クラッチ28aの伝達トルクが入力トルク以上でベルト26cの伝達トルク未満の値となるように制御するので、クラッチ28aの伝達トルクをベルト26cの伝達トルク未満の値に制御することによってベルト26cに作用する予期しない慣性力をクラッチ28aのスリップで吸収することができ、ベルト26cのスリップを防止することができる。また、入力トルク以上の値に制御することで加速時にも必要な加速感を与えることができる。
【0118】
さらに、クラッチ28aの伝達トルクをベルト26cの伝達トルク未満の値に制御することは、換言すればクラッチ28aの係合圧を大きく設定する必要がないことを意味するので、油圧エネルギが増大することがなく、よってポンプ負荷の増加により燃費の悪化を招くこともない。
【0119】
また、前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチ28aをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段(シフトコントローラ90,SS202からS212)を備えると共に、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルト26cの伝達トルク未満の値となるように、前記クラッチ摩擦係数学習を実行させる(S214)如く構成したので、上記した効果に加え、クラッチ28aをスリップさせつつ学習することで学習の間もクラッチ28aをスリップさせることができ、よってクラッチ28aの伝達トルクの制御精度の向上とベルト26cの保護とを両立させることができる。
【0120】
また、前記予め設定された前記ベルト26cの摩擦係数μが、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記CVT(無段変速機)26の制御に使用されるパラメータから検索自在に設定された値からなる如く構成したので、上記した効果に加え、予め設定されたベルト26cの摩擦係数を例えばベルト26cが劣化した下限付近で摩擦係数μのばらつきを吸収できるような値に設定することで、その値をCVT26の制御を反映できるように求めることができ、よってベルト26cの伝達トルクを適正に算出することができる。さらに、摩擦係数μをパラメータ、例えば目標エンジン回転数と実レシオから検索自在とすることで、ベルト伝達トルクをベルト26cの実際の作動状態に即応して算出することができる。
【0121】
また、前記クラッチ28aが、前記エンジン(駆動源)10と前記CVT(無段変速機)26の間に配置される如く構成したので、上記した効果に加え、エンジン10の出力トルクが減少方向に変化する急減速時などの走行状態において駆動輪12にドライブシャフト(駆動軸)34を介して接続されるドリブンプーリ26bからのトルクとエンジン10からの入力トルクとがベルト26cに同時に作用しようとするとき、エンジン10とCVT26の間に配置されるクラッチ28aをスリップさせることで、エンジン10からベルト26cへのトルクの入力を防止でき、よってベルト26cのスリップを一層確実に防止することができる。
【0122】
尚、上記において駆動源(エンジン)の出力トルクが減少方向に変化する走行状態を減速、より具体的にはフューエルカットから判定したが、それに限られるものではなく、例えばブレーキスイッチ40aからブレーキペダル40の操作を検出することで判定しても良い。
【0123】
また、CVTとしてベルト式のCVT26を開示したが、それに限られるものではなく、トロイダル式あるいはチェーン式であっても良い。
【符号の説明】
【0124】
10 エンジン(内燃機関)、12 駆動輪、14 車両、16 DBW機構、24 トルクコンバータ、26 自動変速機(CVT)、28 前後進切換機構、28a 前進クラッチ(クラッチ)、28b 後進ブレーキクラッチ(クラッチ)、34 ドライブシャフト(駆動軸)、46 油圧供給機構、46a 油圧ポンプ、46w EOP(電動油圧ポンプ)、48 動力伝達装置、66 エンジンコントローラ、90 シフトコントローラ
【技術分野】
【0001】
この発明は動力伝達装置に関し、より具体的には無段変速機とクラッチを備えた、車両用の動力伝達装置に関する。
【背景技術】
【0002】
車両が走行時に急ブレーキ(パニックブレーキ)されるなどして急減速させられたとき、駆動軸上の回転が急減し、駆動輪(路面)側から作用する慣性力が急速に増大する。車両に搭載される変速機が無段変速機であると、この慣性力が無段変速機に過大な負荷として作用する。
【0003】
そこで、特許文献1記載の技術において急減速状態が検出されたとき、無段変速機の油圧アクチュエータに供給される調整ライン圧を基準値よりも低下させてベルトを意図的にスリップさせる(滑らせる)ことが提案されている。
【0004】
また、駆動源と駆動輪の間に無段変速機と直列に油圧作動の湿式クラッチを配置し、無段変速機に予期しない負荷が入力されるとき、クラッチをスリップさせてベルトのスリップを回避する、いわゆるクラッチをトルクヒューズとして機能させる技術も良く知られている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平6−76824号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の技術は上記のように構成することでベルトの破損を防止しているが、ベルトをスリップさせることは耐久性の点で望ましくない。その点でクラッチをスリップさせることでベルトのスリップを回避するトルクヒューズ技術は効果的であるが、どのような負荷にも対応可能にするにはクラッチの係合圧を十分に大きく設定しておく必要があり、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招いてしまう。
【0007】
従って、この発明の目的は上記した不都合を解消し、無段変速機が搭載された車両において路面側から予期しない慣性力が無段変速機に入力するときもベルトのスリップを防止するようにした動力伝達装置を提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、請求項1にあっては、車両に搭載される駆動源に接続される駆動プーリと駆動輪に接続される従動プーリと前記駆動プーリと前記従動プーリに巻回されるベルトとからなる無段変速機と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチとを備えた動力伝達装置において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段と、前記駆動プーリに入力される前記駆動源の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段と、少なくとも前記算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段と、前記算出された入力トルクに基づいて前記クラッチの伝達トルクを算出して制御するクラッチ伝達トルク制御手段とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルトの伝達トルク未満の値となるように前記クラッチ伝達トルクを制御する如く構成した。
【0009】
請求項2に係る動力伝達装置にあっては、前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段を備える如く構成した。
【0010】
請求項3に係る動力伝達装置にあっては、前記予め設定された前記ベルトの摩擦係数が、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記無段変速機の制御に使用されるパラメータから検索自在に設定された値からなる如く構成した。
【0011】
請求項4に係る動力伝達装置にあっては、前記クラッチが、前記駆動源と前記無段変速機の間に配置される如く構成した。
【発明の効果】
【0012】
請求項1に係る動力伝達装置にあっては、駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定し、駆動プーリに入力される駆動源の出力トルクと慣性トルクとからなる入力トルクを算出し、少なくとも算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて無段変速機のベルトの伝達トルクを算出し、算出された入力トルクに基づいて無段変速機と直列に配置されるクラッチの伝達トルクを算出して制御すると共に、前記走行状態にあると判定されるとき、クラッチの伝達トルクが算出された入力トルク以上で算出されたベルトの伝達トルク未満の値となるようにクラッチ伝達トルクを制御する如く構成したので、急減速時などに路面側から予期しない慣性力が無段変速機に入力するときも、クラッチを先ずスリップさせることができてベルトのスリップを防止することができる。
【0013】
即ち、クラッチの伝達トルクが入力トルク以上でベルトの伝達トルク未満の値となるように制御するので、クラッチの伝達トルクをベルトの伝達トルク未満の値に制御することによってベルトに作用する予期しない慣性力をクラッチのスリップで吸収することができ、ベルトのスリップを防止することができる。また、入力トルク以上の値に制御することで加速時にも必要な加速感を与えることができる。
【0014】
さらに、クラッチの伝達トルクをベルトの伝達トルク未満の値に制御することは、換言すればクラッチの係合圧を大きく設定する必要がないことを意味するので、油圧エネルギが増大することがなく、よってポンプ負荷の増加による燃費の悪化を招くこともない。
【0015】
請求項2に係る動力伝達装置にあっては、クラッチの摩擦係数をクラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行する手段を備える如く構成したので、上記した効果に加え、クラッチをスリップさせつつ学習することで学習の間もクラッチをスリップさせることができ、よってクラッチの伝達トルクの制御精度の向上とベルトの保護とを両立させることができる。
【0016】
請求項3に係る動力伝達装置にあっては、予め設定されたベルトの摩擦係数が、ベルトが所定期間使用されたときに計測して得られる摩擦係数を無段変速機の制御に使用されるパラメータから検索自在に設定された値からなる如く構成したので、上記した効果に加え、予め設定されたベルトの摩擦係数を例えばベルトが劣化した下限付近で摩擦係数のばらつきを吸収できるような値に設定することで、その値を無段変速機の制御を反映できるように求めることができ、よってベルトの伝達トルクを適正に算出することができる。
【0017】
請求項4に係る動力伝達装置にあっては、クラッチが、駆動源と無段変速機の間に配置される如く構成したので、上記した効果に加え、駆動源の出力トルクが減少方向に変化する急減速時などの走行状態において駆動輪に駆動軸を介して接続される従動プーリからのトルクと駆動源からの入力トルクとがベルトに同時に作用しようとするとき、駆動源と無段変速機の間に配置されるクラッチをスリップさせることで、駆動源からベルトへのトルクの入力を防止でき、よってベルトのスリップを一層確実に防止することができる。
【図面の簡単な説明】
【0018】
【図1】この発明の実施例に係る動力伝達装置を全体的に示す概略図である。
【図2】図1に示す変速機油圧供給機構の油圧回路図である。
【図3】図1に示すシフトコントローラの動作を機能的に示すブロック図である。
【図4】図3に示す装置の動作のうちのクラッチ伝達トルク算出手段の動作を示すフロー・チャートである。
【図5】図3に示す装置の動作のうちのプーリ側圧制御手段の動作を示すフロー・チャートである。
【図6】図3に示す装置の動作のうちのクラッチ伝達トルク制御手段の動作を示すフロー・チャートである。
【図7】図1に示す動力伝達装置の車速に対するトルクの制御特性を示す説明図である。
【発明を実施するための形態】
【0019】
以下、添付図面に即してこの発明に係る動力伝達装置を実施するための形態を説明する。
【実施例】
【0020】
図1は、この発明の実施例に係る動力伝達装置を全体的に示す概略図、図2は図1に示す油圧供給機構の油圧回路図である。
【0021】
図1において、符号10はエンジン(内燃機関(駆動源))を示す。エンジン10は駆動輪12を備えた車両14に搭載される(車両14は駆動輪12などで部分的に示す)。
【0022】
エンジン10の吸気系に配置されたスロットルバルブ(図示せず)は車両運転席床面に配置されるアクセルペダルとの機械的な接続が絶たれ電動モータなどのアクチュエータからなるDBW(Drive By Wire)機構16に接続され、DBW機構16で開閉される。
【0023】
スロットルバルブで調量された吸気はインテークマニホルド(図示せず)を通って流れ、各気筒の吸気ポート付近でインジェクタ20から噴射された燃料と混合して混合気を形成し、吸気バルブ(図示せず)が開弁されたとき、当該気筒の燃焼室(図示せず)に流入する。燃焼室において混合気は点火されて燃焼し、ピストンを駆動してクランクシャフト22を回転させた後、排気となってエンジン10の外部に放出される。
【0024】
クランクシャフト22の回転はトルクコンバータ24を介して無段変速機(Continuous Variable Transmission。以下「CVT」という)26に入力される。
【0025】
即ち、クランクシャフト22はトルクコンバータ24のポンプ・インペラ24aに接続される一方、それに対向配置されて流体(作動油)を収受するタービン・ランナ24bはメインシャフト(入力軸)MSに接続される。
【0026】
CVT26はメインシャフトMS、より正確にはその外周側シャフトに配置されたドライブプーリ26aと、メインシャフトMSに平行なカウンタシャフト(出力軸)CS、より正確にはその外周側シャフトに配置されたドリブンプーリ26bと、その間に掛け回される無端可撓部材からなる動力伝達要素、例えば金属製のベルト26cからなる。
【0027】
ドライブプーリ26aは、メインシャフトMSの外周側シャフトに相対回転不能で軸方向移動不能に配置された固定プーリ半体26a1と、メインシャフトMSの外周側シャフトに相対回転不能で固定プーリ半体26a1に対して軸方向に相対移動可能な可動プーリ半体26a2からなる。
【0028】
ドリブンプーリ26bは、カウンタシャフトCSの外周側シャフトに相対回転不能で軸方向移動不能に配置された固定プーリ半体26b1と、カウンタシャフトCSに相対回転不能で固定プーリ半体26b1に対して軸方向に相対移動可能な可動プーリ半体26b2からなる。
【0029】
CVT26は前後進切換機構28を介してエンジン10に接続される。前後進切換機構28は、車両14の前進方向への走行を可能にする前進クラッチ28aと、後進方向への走行を可能にする後進ブレーキクラッチ28bと、その間に配置されるプラネタリギヤ機構28cからなる。CVT26はエンジン10に前進クラッチ28aを介して接続される。
【0030】
前進クラッチ28aと後進ブレーキクラッチ28bが、より具体的には主として前進クラッチ28aが前記したトルクヒューズのクラッチとして機能する。以下、前進クラッチ28aを単に「クラッチ」という。
【0031】
プラネタリギヤ機構28cにおいて、サンギヤ28c1はメインシャフトMSに固定されると共に、リングギヤ28c2は前進クラッチ28aを介してドライブプーリ26aの固定プーリ半体26a1に固定される。
【0032】
サンギヤ28c1とリングギヤ28c2の間には、ピニオン28c3が配置される。ピニオン28c3は、キャリア28c4でサンギヤ28c1に連結される。キャリア28c4は、後進ブレーキクラッチ28bが作動させられると、それによって固定(ロック)される。
【0033】
カウンタシャフトCSの回転はギヤを介してセカンダリシャフト(中間軸)SSから駆動輪12に伝えられる。即ち、カウンタシャフトCSの回転はギヤ30a,30bを介してセカンダリシャフトSSに伝えられ、その回転はギヤ30cを介してディファレンシャル32からドライブシャフト(駆動軸)34を介して左右の駆動輪(右側のみ示す)12に伝えられる。
【0034】
駆動輪(前輪)12と従動輪(後輪。図示せず)からなる4個の車輪の付近にはディスクブレーキ36が配置されると共に、車両運転席床面にはブレーキペダル40が配置される。
【0035】
前後進切換機構28において前進クラッチ28aと後進ブレーキクラッチ28bの切換は、車両運転席に設けられたレンジセレクタ44を運転者が操作して例えばP,R,N,Dなどのレンジのいずれかを選択することで行われる。運転者のレンジセレクタ44の操作によるレンジ選択は油圧供給機構46(後述)のマニュアルバルブに伝えられる。
【0036】
レンジセレクタ44を介して例えばD,S,Lレンジが選択されると、それに応じてマニュアルバルブのスプールが移動し、後進ブレーキクラッチ28bのピストン室から作動油(油圧)が排出される一方、前進クラッチ28aのピストン室に油圧が供給されて前進クラッチ28aが締結される。
【0037】
前進クラッチ28aが締結されると、全ギヤがメインシャフトMSと一体に回転し、ドライブプーリ26aはメインシャフトMSと同方向(前進方向)に駆動され、よって車両14は前進方向に走行する。
【0038】
Rレンジが選択されると、前進クラッチ28aのピストン室から作動油が排出される一方、後進ブレーキクラッチ28bのピストン室に油圧が供給されて後進ブレーキクラッチ28bが作動する。従ってキャリア28c4が固定されてリングギヤ28c2はサンギヤ28c1とは逆方向に駆動され、ドライブプーリ26aはメインシャフトMSとは逆方向(後進方向)に駆動され、車両14は後進方向に走行する。
【0039】
PあるいはNレンジが選択されると、両方のピストン室から作動油が排出されて前進クラッチ28aと後進ブレーキクラッチ28bが共に開放され、前後進切換機構28を介しての動力伝達が断たれ、エンジン10とCVT26のドライブプーリ26aとの間の動力伝達が遮断される。
【0040】
図2は油圧供給機構46の油圧回路図である。
【0041】
図示の如く、油圧供給機構46には油圧ポンプ46aが設けられる。油圧ポンプ46aはギヤポンプからなり、エンジン(E)10によって駆動され、リザーバ46bに貯留された作動油を汲み上げてPH制御バルブ(PH REG VLV)46cに圧送する。
【0042】
PH制御バルブ46cの出力(PH圧(ライン圧))は、一方では油路46dから第1、第2のレギュレータバルブ(DR REG VLV, DN REG VLV)46e,46fを介してCVT26のドライブプーリ26aの可動プーリ半体26a2のピストン室(DR)26a21とドリブンプーリ26bの可動プーリ半体26b2のピストン室(DN)26b21に接続されると共に、他方では油路46gを介してCRバルブ(CR VLV)46hに接続される。
【0043】
CRバルブ46hはPH圧を減圧してCR圧(制御圧)を生成し、油路46iから第1、第2、第3の(電磁)リニアソレノイドバルブ46j,46k,46l(LS-DR, LS-DN, LS-CPC)に供給する。
【0044】
第1、第2のリニアソレノイドバルブ46j,46kはそのソレノイドの励磁に応じて決定される出力圧を第1、第2のレギュレータバルブ46e,46fに作用させ、よって油路46dから送られるPH圧の作動油を可動プーリ半体26a2,26b2のピストン室26a21,26b21に供給し、それに応じてプーリ側圧を発生させる。
【0045】
従って、可動プーリ半体26a2,26b2を軸方向に移動させるプーリ側圧が発生させられてドライブプーリ26aとドリブンプーリ26bのプーリ幅が変化し、ベルト26cの巻掛け半径が変化する。このように、プーリの側圧を調整することで、エンジン10の出力を駆動輪12に伝達するレシオ(変速比)を無段階に変化させることができる。
【0046】
CRバルブ46hの出力(CR圧)は油路46mを介してCRシフトバルブ(CR SFT VLV)46nにも接続され、そこから前記したマニュアルバルブ(MAN VLV。符号46oで示す)を介して前後進切換機構28の前進クラッチ28aのピストン室(FWD)28a1と後進ブレーキクラッチ28bのピストン室(RVS)28b1に接続される。
【0047】
マニュアルバルブ46oは、前記した如く、運転者によって操作(選択)されたレンジセレクタ44の位置に応じてCRシフトバルブ46nの出力を前進クラッチ28aと後進ブレーキクラッチ28bのピストン室28a1,28b1のいずれかに接続する。
【0048】
また、PH制御バルブ46cの出力は、油路46pを介してTCレギュレータバルブ(TC REG VLV)46qに送られ、TCレギュレータバルブ46qの出力はLCコントロールバルブ(LC CTL VLV)46rを介してLCシフトバルブ(LC SFT VLV)46sに接続される。
【0049】
LCシフトバルブ46sの出力は一方ではトルクコンバータ24のロックアップクラッチ24cのピストン室24c1に接続されると共に、他方ではその背面側の室24c2に接続される。
【0050】
LCシフトバルブ46sを介して作動油がピストン室24c1に供給される一方、背面側の室24c2から排出されると、ロックアップクラッチ24cが係合(オン)され、背面側の室24c2に供給される一方、ピストン室24c1から排出されると、解放(オフ)される。ロックアップクラッチ24cのスリップ量は、ピストン室24c1と背面側の室24c2に供給される作動油の量によって決定される。
【0051】
CRバルブ46hの出力は油路46tを介してLCコントロールバルブ46rとLCシフトバルブ46sに接続されると共に、油路46tには第4のリニアソレノイドバルブ(LS−LC)46uが介挿される。ロックアップクラッチ24cのスリップ量は、第4のリニアソレノイドバルブ46uのソレノイドの励磁・非励磁によって調整(制御)される。
【0052】
さらに、油圧ポンプ46aの下流でPH制御バルブ46cの上流に相当する位置には電動モータ46vに接続されるEOP(Electric Oil Pump。電動油圧ポンプ)46wがチェックバルブ46xを介して接続される。
【0053】
EOP46wも油圧ポンプ46aと同様にギヤポンプからなり、電動モータ46vで駆動され、リザーバ46bに貯留された作動油を汲み上げてPH制御バルブ(PH REG VLV)46cに圧送する。
【0054】
この明細書において動力伝達装置(符号48で示す)は、トルクコンバータ24とCVT26と前後進切換機構28とからなる。
【0055】
図1の説明に戻ると、エンジン10のカム軸(図示せず)付近などの適宜位置にはクランク角センサ50が設けられ、ピストンの所定クランク角度位置ごとにエンジン回転数NEを示す信号を出力する。吸気系においてスロットルバルブの下流の適宜位置には絶対圧センサ52が設けられ、吸気管内絶対圧(エンジン負荷)PBAに比例した信号を出力する。
【0056】
DBW機構16のアクチュエータにはスロットル開度センサ54が設けられ、アクチュエータの回転量を通じてスロットルバルブの開度THに比例した信号を出力する。
【0057】
また前記したアクセルペダル(符号56で示す)の付近にはアクセル開度センサ56aが設けられて運転者のアクセルペダル操作量に相当するアクセル開度APに比例する信号を出力すると共に、ブレーキペダル40の付近にはブレーキスイッチ40aが設けられて運転者のブレーキペダル40の操作に応じてオン信号を出力する。
【0058】
さらに、エンジン10の冷却水通路(図示せず)の付近には水温センサ(図示せず)が設けられ、エンジン冷却水温TW、換言すればエンジン10の温度に応じた出力を生じる。
【0059】
上記したクランク角センサ50などの出力は、エンジンコントローラ66に送られる。エンジンコントローラ66はCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備え、それらセンサ出力に基づいて目標スロットル開度を決定してDBW機構16の動作を制御すると共に、燃料噴射量を決定してインジェクタ20を駆動する。
【0060】
メインシャフトMSにはNTセンサ(回転数センサ)70が設けられ、タービン・ランナ24bの回転数、具体的にはメインシャフトMSの回転数NT、より具体的には変速機入力軸回転数(と前進クラッチ28aの入力軸回転数)を示すパルス信号を出力する。
【0061】
CVT26のドライブプーリ26aの付近の適宜位置にはNDRセンサ(回転数センサ)72が設けられてドライブプーリ26aの回転数NDR、換言すれば前進クラッチ28aの出力軸回転数に応じたパルス信号を出力する。
【0062】
ドリブンプーリ26bの付近の適宜位置にはNDNセンサ(回転数センサ)74が設けられてドリブンプーリ26bの回転数NDN、具体的にはカウンタシャフトCSの回転数、より具体的には変速機出力軸回転数を示すパルス信号を出力する。
【0063】
またセカンダリシャフトSSのギヤ30bの付近にはVセンサ(回転数センサ)76が設けられてセカンダリシャフトSSの回転数と回転方向を示すパルス信号(具体的には車速Vを示すパルス信号)を出力する。駆動輪12と従動輪(図示せず)からなる4個の車輪の付近にはそれぞれ車輪速センサ80が設けられ、車輪の回転速度を示す車輪速に比例するパスル信号を出力する。
【0064】
図1の説明に戻ると、前記したレンジセレクタ44の付近にはレンジセレクタスイッチ44aが設けられ、運転者によって選択されたR,N,Dなどのレンジに応じた信号を出力する。
【0065】
図2に示す如く、油圧供給機構46においてCVT26のドリブンプーリ26bに通じる油路には油圧センサ82が配置されてドリブンプーリ26bの可動プーリ半体26b2のピストン室26b21に供給される油圧に応じた信号を出力する。リザーバ46bには油温センサ84が配置されて油温(作動油ATFの温度TATF)に応じた信号を出力する。
【0066】
上記したNTセンサ70などの出力は、図示しないその他のセンサの出力も含め、シフトコントローラ90に送られる。シフトコントローラ90もCPU,ROM,RAM,I/Oなどからなるマイクロコンピュータを備えると共に、エンジンコントローラ66と通信自在に構成される。
【0067】
シフトコントローラ90は、それら検出値に基づき、油圧供給機構46の第4のリニアソレノイドバルブ46uなどの電磁ソレノイドを励磁・非励磁して前後進切換機構28とCVT26とトルクコンバータ24の動作を制御すると共に、油圧供給機構46の電動モータ46vに通電してEOP46wの動作を制御する。
【0068】
図3はシフトコントローラ90の上記した動作のうち、最初に述べたCVT26のベルト26cのスリップ防止動作を機能的に示すブロック図である。
【0069】
図示の如く、シフトコントローラ90は、車両14が減速しているか、換言すればエンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する減速検出手段(走行状態判定手段)90aと、エンジン10からメインシャフトMSを介してCVT26のドライブプーリ26aに入力されるエンジン10の出力トルクと慣性トルクとからなる入力を算出する入力トルク算出手段90bと、ベルト下限μ、即ち、予め設定されたベルト26cの摩擦係数μを算出するベルト下限μ算出手段90cと、少なくとも算出された入力トルクと下限μとに基づいてプーリ側圧、即ち、ベルト26cの伝達トルクを算出するプーリ側圧制御手段(ベルト伝達トルク算出手段)90dと、算出された入力トルクに基づいてクラッチ(前進クラッチ)28aの伝達トルクを算出するクラッチ伝達トルク算出手段90eと、クラッチ伝達トルク算出手段90eの出力に基づいてクラッチ28aの伝達トルクを制御するクラッチ伝達トルク制御手段90fとを備える。
【0070】
さらに、低μ路、即ち、車両14が走行する走行路のうち、路面の摩擦係数μが低い走行路面か否か検出する低μ路検出手段90gを備える。低μ路検出手段90gの出力はプーリ側圧制御手段90dに送られる。
【0071】
クラッチ伝達トルク制御手段90fとプーリ側圧制御手段90dの出力はそれぞれ油圧指令値算出手段90h,90iに送られ、そこで算出された指令値に基づいて動力伝達装置48の動作が制御される。
【0072】
図4は上記したクラッチ伝達トルク算出手段の動作を詳細に示すフロー・チャートである。
【0073】
以下説明すると、S10において入力トルクを算出する。入力トルクはメインシャフトMSを介してCVT26のドライブプーリ26aに入力される、エンジン10の出力トルクと慣性トルクとからなる入力トルクを意味し、S10の処理は図3の入力トルク算出手段90bの算出値を読み込むことで行われる。
【0074】
エンジン10の出力トルクは、エンジン回転数NEと吸気管内絶対圧PBAからマップ検索して得られるエンジントルクにトルクコンバータ24の増幅率を乗じて算出される。
【0075】
慣性トルクは、以下の式から算出される。
慣性トルク={(Ie+Itbn+Idr)/(Ie+Itbn+Idr+Idn)}×最大ブレーキトルク
【0076】
上記で:Ie:エンジン10の慣性トルク、Itbn:トルクコンバータ24のタービン・ランナ24bの慣性トルク、Idr:CVT26のドライブプーリ26aの慣性トルク、Idn:そのドリブンプーリ26bの慣性トルクである。上記した慣性トルクと最大ブレーキトルクの値は予め実験で求められる固定値である。
【0077】
次いでS12において算出された入力トルクに基づいてクラッチ28aの伝達トルクを算出する。クラッチの伝達トルクは算出された入力トルクに適宜な係数を乗じることで算出する。S12の処理は図3のクラッチ伝達トルク算出手段90eの算出値を読み込むことで行われる。
【0078】
次いでS14に進み、車両14が減速、換言すればエンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する。S14の処理は図3の減速検出手段90aの出力を読み込むことで行われる。
【0079】
減速検出手段90aは具体的にはエンジンコントローラ66にアクセスし、エンジン10がフューエルカット(燃料供給停止)されているか否か判断し、肯定されるとき車両14が減速と判定する。エンジンコントローラ66は、アクセルペダル22が踏まれず、エンジン回転数NEが所定値以上のとき、エンジン10への燃料噴射量の供給を停止(フューエルカット)する。
【0080】
S14で否定されるときは以降の処理をスキップする一方、肯定されるときはS16に進み、S12において算出されたクラッチ伝達トルクが入力トルクとほぼ等しくなるように、即ち、同一の値か近傍の値となるように補正する。これについては後述する。
【0081】
図5は上記したプーリ側圧制御手段の動作を詳細に示すフロー・チャートである。
【0082】
以下説明すると、S100において図4フロー・チャートのS10と同様に入力トルクを算出し、S102においてCVT26のドライブプーリ26aとドリブンプーリ26bに供給すべきプーリ側圧(油圧制御値)を算出する。
【0083】
即ち、先ずドライブプーリ26aとドリブンプーリ26bのうちの低圧側について上記した入力トルクと実レシオに基づいてベルト26cがスリップしない程度の力で押圧する必要側圧を算出する。
【0084】
また高圧側について(Vセンサ76とアクセル開度センサ56aから検出される)車速Vとアクセル開度APから検索される目標エンジン回転数(具体的にはドライブプーリ26aの回転数NDRで規定される回転数)が実現されるべく設定される目標レシオが保持されるように側圧比を算出する。
【0085】
次いで必要側圧に算出された側圧比を乗じて両者の積を求め、求めた積に実レシオ(NDRセンサ72とNDNセンサ74の検出値の比)と目標レシオの偏差が減少するように演算されるF/B項を加算し、よって得た和をプーリ側圧とすることで算出する。
【0086】
次いでS104に進み、現在車両14が走行している走行路が路面摩擦係数μの値が低い低μ路か否か判断する。これは低μ路検出手段90gの出力を読み込むことで判断する。
【0087】
低μ路検出手段90gは、車輪速センサ80の出力から4個の車輪の車両前後方向の滑り比と左右方向の滑り比を算出し、そのいずれかが所定範囲内にないとき、車両14が低μ路を走行していると判断する。
【0088】
S104で否定されるときは以降の処理をスキップする一方、肯定されるときはS106に進み、プーリ側圧を増加補正する。この補正は具体的には、必要側圧の算出に使用される入力トルクに適宜な係数を乗じて入力トルクを増加することで、プーリ側圧を増加補正する。この処理は、車輪ロックに対応するためである。
【0089】
図6は上記したクラッチ伝達トルク制御手段の動作を詳細に示すフロー・チャートである。
【0090】
先ずS200において車両14が減速か、即ち、エンジン10の出力トルクが減少方向に変化する走行状態にあるか否か判定する。この処理はS14と同様、図3の減速検出手段90aの出力を読み込むことで行われる。
【0091】
S200で否定されるときは以降の処理をスキップする一方、肯定されるときはS202に進み、クラッチμ、即ち、クラッチ28aの摩擦係数μ(後述)が学習済みか否か判断する。
【0092】
S202で否定されるときはS204に進み、クラッチスリップF/B制御を介してクラッチμを学習し、S206に進み、クラッチμ学習済みと判定してS202に戻る一方、S202で肯定されるときはS208に進み、クラッチ学習μで(学習された摩擦係数μを用いて)クラッチ圧を算出する。
【0093】
次いでS210に進み、クラッチ28aにスリップ(滑り)が発生したか否か判断し、肯定されるときはS212に進み、クラッチ28aのスリップがなくなるまでクラッチ圧を加算する。尚、S210で否定されるときはS212をスキップする。
【0094】
S202からS212までの処理を説明すると、この実施例はクラッチ28aをスリップさせることによってCVT26のベルト26cのスリップを回避させることから、クラッチ28aのスリップ量は大きな値に設定するのが望ましい。他方、そうすると、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招く。
【0095】
そこで、車両14が減速と判断されるときは、クラッチ28aを微小にスリップさせるようにF/B制御してクラッチ28aのクラッチ圧を精度良く算出し、それに基づいてクラッチ伝達トルクを算出・制御するようにした。
【0096】
クラッチ28aのクラッチ圧は以下のように算出される。
クラッチ圧=入力トルク/(摩擦係数μ×クラッチピストン面積×クラッチ面数×クラッチ有効径)
上記で、入力トルクは図4フロー・チャートのS10で算出される値である。クラッチピストン面積、クラッチ面数、クラッチ有効径はクラッチ28aのピストン室28a1の面積、面(プレート)の数、有効径を示し、全て既知の値(固定値)である。
【0097】
S208の処理においてはクラッチ28aの摩擦係数μとして例えば低μ路走行用の比較的低い値を初期値として用いて上式に基づいてクラッチ圧(クラッチ制御油圧)を算出すると共に、S202からS206の処理で摩擦係数μの学習値が得られるときはその最新の学習値に基づいてクラッチ圧を算出し、図2に示すCRシフトバルブ46nなどの動作を制御してクラッチ28aに作動圧(油圧)を供給する。
【0098】
学習制御においてS204ではクラッチ28aのスリップ率(NTセンサ70とNDRセンサ72から検出)が例えば1%となるように摩擦係数μの前回値と今回値の加重平均値を算出して摩擦係数μを学習する。
【0099】
尚、S202からS206の学習制御の間はクラッチ28aが既にスリップさせられているので、CVT26のベルト26cのスリップは生じることがない。
【0100】
次いでS214に進み、S212で加算されたクラッチ圧を適宜な油圧―トルク変換係数を用いてクラッチ伝達トルクに算出すると共に、ベルト下限μによるベルト伝達トルクを求め、求めたクラッチ伝達トルクが(図4フロー・チャートのS10で算出される)入力トルク以上で、算出されたベルト伝達トルク未満か否か判断する。
【0101】
ベルト下限μは予め設定されたCVT26のベルト26cの摩擦係数を意味する。この値は具体的には、ベルト26cが所定期間使用されたときに計測して得られる摩擦係数をCVT26の制御に使用されるパラメータ、より具体的には前記した目標エンジン回転数(正確にはドライブプーリ26aの回転数NDRで規定される回転数)と実レシオから検索自在にマップ値として予め設定されてシフトコントローラ90のROMに格納される。
【0102】
またベルト伝達トルクはCVT26のベルト26cによって伝達されるトルクを意味し、具体的には図5フロー・チャートのS102で算出されるプーリ側圧(油圧制御値)を適宜な油圧―トルク変換係数を介してトルク値に変換された値を意味する。
【0103】
従って、S214にあっては、(図4フロー・チャートのS10で算出される)入力トルクと実レシオから必要側圧(油圧)を算出し、算出された必要側圧を、(目標エンジン回転数と実レシオから)マップ検索して得られる下限μと適宜な油圧―トルク変換係数を用いてトルク値に変換して下限μによるベルト伝達トルクを算出する。
【0104】
このS214の判断で否定されるときはS204に戻り、S214で肯定されるまで、上記した学習制御を繰り返しつつ、クラッチ28aがスリップしないクラッチ圧を算出(加算)する。
【0105】
図6フロー・チャートの上記した処理を繰り返すことにより、図3ブロック図の油圧指令値算出手段90h,90iによってクラッチ伝達トルクが入力トルク以上でベルト下限μによるベルト伝達トルク未満の値となるように制御される。
【0106】
これについて図7を参照して説明する。同図は動力伝達装置48の車速に対するトルクの制御特性を示す説明図である。
【0107】
同図において縦軸はトルクを示し、図中の最下位の特性は、メインシャフトMS上の(ドライブプーリ26aに入力される)入力トルク(図4フロー・チャートのS10で算出)、中位の特性はベルト下限μによるベルト伝達トルク(図6フロー・チャートのS214で算出)、最上位の特性はPH圧(図2のPH制御バルブ46cの出力油圧)を示す。
【0108】
もし、クラッチ伝達トルクが同図に矢印(想像線)aで示す如く、ベルト伝達トルクより上になるように制御されると仮定すると、車両14が走行時に急ブレーキ(パニックブレーキ)されるなどして急減速させられたとき、ドライブシャフト34上の回転が急減し、駆動輪12(路面)側から作用する慣性力が急速に増大し、CVTに過大な負荷として作用する。
【0109】
その場合、特許文献1でライン圧を基準値よりも低下させてベルト26cを意図的にスリップさせることが提案されているが、ベルト26cをスリップさせることは耐久性の点で望ましくない。
【0110】
その点でクラッチ28aをスリップさせてベルト26cのスリップを回避するトルクヒューズ技術は効果的であるが、どのような負荷にも対応可能にするにはクラッチ28aの係合圧を十分に大きく設定しておく必要があり、油圧エネルギが増大することでポンプ負荷が増加し、燃費の悪化を招いてしまう。
【0111】
従って、この実施例においては、同図に矢印(実線)bで示す如く、車両14が減速されたとき、ベルト下限μによるベルト伝達トルクを求め、クラッチ伝達トルクが求めたベルト伝達トルク未満となるように制御する如く構成した。これにより、CVT26が搭載された車両14において路面側から予期しない慣性力がCVT26に入力するときもベルト26cのスリップを防止することができる。
【0112】
即ち、プーリ側圧は入力トルクと実レシオから算出されることから、(低μ路を走行している場合を除くと)ベルト26cが新品であっても劣化していても、同一の値に算出されるが、上記のようにベルト下限μを検索して(プーリ側圧を決定するのに用いられる)ベルト伝達トルクを求めることで、ベルト26cの劣化度合いに応じたプーリ側圧(およびそれから算出されるベルト伝達トルク)を求めることができる。
【0113】
さらに、図4フロー・チャートに示す如く、減速時にないときは入力トルクに適宜な係数を乗じて算出されるクラッチ伝達トルクに制御、換言すれば入力トルク<クラッチ伝達トルクとなるように制御されるので、加速時などに必要な加速感を与えることができる。
【0114】
また、減速時は入力トルク≦クラッチ伝達トルク<ベルト下限μによるベルト伝達トルクとなるように制御することで、クラッチ28aをスリップさせ易くできる。即ち、急減速でのブレーキトルクが駆動輪12から入力されたとき、エンジン10からの入力トルク以上にクラッチ伝達トルクをしておくことでクラッチ28aをスリップさせ易くできる。また、クラッチ伝達トルクに対応するプーリ側圧(油圧)も低くて済むことから、油圧エネルギの増大(燃費の増加)も回避することができる。
【0115】
さらに、ベルト下限μを目標エンジン回転数と実レシオから検索自在とすることで、ベルト伝達トルクをベルト26cの実際の作動状態に即応して算出することができる。
【0116】
上記した如く、この実施例にあっては、車両14に搭載されるエンジン(駆動源)10に接続されるドライブプーリ(駆動プーリ)26aと駆動輪12に接続されるドリブンプーリ(従動プーリ)26bと前記ドライブプーリと前記ドリブンプーリに巻回されるベルト26cとからなるCVT(無段変速機)26と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチ(前進クラッチ28aと後進ブレーキクラッチ28b、特に前進クラッチ28a)とを備えた動力伝達装置48において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段(シフトコントローラ90,S14,S200)と、前記ドライブプーリ26a、より具体的にはメインシャフトMSを介してドライブプーリ26aに入力される前記エンジン10の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段(シフトコントローラ90,S10)と、少なくとも前記算出された入力トルクと予め設定された前記ベルト26cの摩擦係数(ベルト下限μ)とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段(シフトコントローラ90,S214)と、前記算出された入力トルクに基づいて前記クラッチの伝達トルク(クラッチ伝達トルク)を算出して制御するクラッチ伝達トルク制御手段(シフトコントローラ90,S202からS214、油圧指令値算出手段段90h,90i)とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルク(クラッチ伝達トルク)が前記算出された入力トルク以上で前記算出されたベルト26cの伝達トルク(ベルト下限μによるベルト伝達トルク)未満の値となるように前記クラッチ伝達トルクを制御する如く構成したので、急減速時などに路面側から予期しない慣性力がCVT26に入力するときも、クラッチ28aを先ずスリップさせることができるので、ベルト26cのスリップを防止することができる。
【0117】
即ち、クラッチ28aの伝達トルクが入力トルク以上でベルト26cの伝達トルク未満の値となるように制御するので、クラッチ28aの伝達トルクをベルト26cの伝達トルク未満の値に制御することによってベルト26cに作用する予期しない慣性力をクラッチ28aのスリップで吸収することができ、ベルト26cのスリップを防止することができる。また、入力トルク以上の値に制御することで加速時にも必要な加速感を与えることができる。
【0118】
さらに、クラッチ28aの伝達トルクをベルト26cの伝達トルク未満の値に制御することは、換言すればクラッチ28aの係合圧を大きく設定する必要がないことを意味するので、油圧エネルギが増大することがなく、よってポンプ負荷の増加により燃費の悪化を招くこともない。
【0119】
また、前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチ28aをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段(シフトコントローラ90,SS202からS212)を備えると共に、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルト26cの伝達トルク未満の値となるように、前記クラッチ摩擦係数学習を実行させる(S214)如く構成したので、上記した効果に加え、クラッチ28aをスリップさせつつ学習することで学習の間もクラッチ28aをスリップさせることができ、よってクラッチ28aの伝達トルクの制御精度の向上とベルト26cの保護とを両立させることができる。
【0120】
また、前記予め設定された前記ベルト26cの摩擦係数μが、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記CVT(無段変速機)26の制御に使用されるパラメータから検索自在に設定された値からなる如く構成したので、上記した効果に加え、予め設定されたベルト26cの摩擦係数を例えばベルト26cが劣化した下限付近で摩擦係数μのばらつきを吸収できるような値に設定することで、その値をCVT26の制御を反映できるように求めることができ、よってベルト26cの伝達トルクを適正に算出することができる。さらに、摩擦係数μをパラメータ、例えば目標エンジン回転数と実レシオから検索自在とすることで、ベルト伝達トルクをベルト26cの実際の作動状態に即応して算出することができる。
【0121】
また、前記クラッチ28aが、前記エンジン(駆動源)10と前記CVT(無段変速機)26の間に配置される如く構成したので、上記した効果に加え、エンジン10の出力トルクが減少方向に変化する急減速時などの走行状態において駆動輪12にドライブシャフト(駆動軸)34を介して接続されるドリブンプーリ26bからのトルクとエンジン10からの入力トルクとがベルト26cに同時に作用しようとするとき、エンジン10とCVT26の間に配置されるクラッチ28aをスリップさせることで、エンジン10からベルト26cへのトルクの入力を防止でき、よってベルト26cのスリップを一層確実に防止することができる。
【0122】
尚、上記において駆動源(エンジン)の出力トルクが減少方向に変化する走行状態を減速、より具体的にはフューエルカットから判定したが、それに限られるものではなく、例えばブレーキスイッチ40aからブレーキペダル40の操作を検出することで判定しても良い。
【0123】
また、CVTとしてベルト式のCVT26を開示したが、それに限られるものではなく、トロイダル式あるいはチェーン式であっても良い。
【符号の説明】
【0124】
10 エンジン(内燃機関)、12 駆動輪、14 車両、16 DBW機構、24 トルクコンバータ、26 自動変速機(CVT)、28 前後進切換機構、28a 前進クラッチ(クラッチ)、28b 後進ブレーキクラッチ(クラッチ)、34 ドライブシャフト(駆動軸)、46 油圧供給機構、46a 油圧ポンプ、46w EOP(電動油圧ポンプ)、48 動力伝達装置、66 エンジンコントローラ、90 シフトコントローラ
【特許請求の範囲】
【請求項1】
車両に搭載される駆動源に接続される駆動プーリと駆動輪に接続される従動プーリと前記駆動プーリと前記従動プーリに巻回されるベルトとからなる無段変速機と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチとを備えた動力伝達装置において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段と、前記駆動プーリに入力される前記駆動源の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段と、少なくとも前記算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段と、前記算出された入力トルクに基づいて前記クラッチの伝達トルクを算出して制御するクラッチ伝達トルク制御手段とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルトの伝達トルク未満の値となるように前記クラッチ伝達トルクを制御することを特徴とする動力伝達装置。
【請求項2】
前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段を備えることを特徴とする請求項1記載の動力伝達装置。
【請求項3】
前記予め設定された前記ベルトの摩擦係数が、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記無段変速機の制御に使用されるパラメータから検索自在に設定された値からなることを特徴とする請求項1または2記載の動力伝達装置。
【請求項4】
前記クラッチが、前記駆動源と前記無段変速機の間に配置されることを特徴とする請求項1から3のいずれかに記載の動力伝達装置。
【請求項1】
車両に搭載される駆動源に接続される駆動プーリと駆動輪に接続される従動プーリと前記駆動プーリと前記従動プーリに巻回されるベルトとからなる無段変速機と、前記駆動源と前記駆動輪の間で前記無段変速機と直列に配置されるクラッチとを備えた動力伝達装置において、前記駆動源の出力トルクが減少方向に変化する走行状態にあるか否か判定する走行状態判定手段と、前記駆動プーリに入力される前記駆動源の出力トルクと慣性トルクとからなる入力トルクを算出する入力トルク算出手段と、少なくとも前記算出された入力トルクと予め設定された前記ベルトの摩擦係数とに基づいて前記ベルトの伝達トルクを算出するベルト伝達トルク算出手段と、前記算出された入力トルクに基づいて前記クラッチの伝達トルクを算出して制御するクラッチ伝達トルク制御手段とを備えると共に、前記クラッチ伝達トルク制御手段は、前記走行状態にあると判定されるとき、前記クラッチの伝達トルクが前記算出された入力トルク以上で前記算出されたベルトの伝達トルク未満の値となるように前記クラッチ伝達トルクを制御することを特徴とする動力伝達装置。
【請求項2】
前記クラッチ伝達トルク制御手段は、前記クラッチの摩擦係数を前記クラッチをスリップさせつつ学習するクラッチ摩擦係数学習を実行するクラッチ摩擦係数学習手段を備えることを特徴とする請求項1記載の動力伝達装置。
【請求項3】
前記予め設定された前記ベルトの摩擦係数が、前記ベルトが所定期間使用されたときに計測して得られる摩擦係数を前記無段変速機の制御に使用されるパラメータから検索自在に設定された値からなることを特徴とする請求項1または2記載の動力伝達装置。
【請求項4】
前記クラッチが、前記駆動源と前記無段変速機の間に配置されることを特徴とする請求項1から3のいずれかに記載の動力伝達装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−113390(P2013−113390A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260932(P2011−260932)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]