
動力出力装置の制御装置および制御方法
【課題】エンジンの出力軸に少なくともねじれ要素を介して接続された電動機により当該エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制する。
【解決手段】エンジン22が運転されるときには、モータMG1の回転数Nm1が取得されると共に、取得された回転数Nm1をねじれ要素としてのダンパ28のねじれ角θdに基づいて補正することにより制御用回転数Nmc1が算出され(ステップS130〜S150)、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにモータMG1が制御される(ステップS160〜S200)。
【解決手段】エンジン22が運転されるときには、モータMG1の回転数Nm1が取得されると共に、取得された回転数Nm1をねじれ要素としてのダンパ28のねじれ角θdに基づいて補正することにより制御用回転数Nmc1が算出され(ステップS130〜S150)、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにモータMG1が制御される(ステップS160〜S200)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力を出力可能なエンジンと、エンジンの出力軸に少なくともねじれ要素を介して接続された電動機とを備えた動力出力装置の制御装置および制御方法に関する。
【背景技術】
【0002】
従来、この種の動力出力装置の制御装置としては、エンジンからの動力を受ける入力軸、電動発電機の回転軸および駆動軸を機械的に結合すると共にエンジンからの動力を電動発電機および駆動軸に機械的に分配するように構成された動力分割機構と、エンジンの出力軸および動力分割機構の入力軸の間に結合されると共にエンジンの出力軸と動力分割機構の入力軸との相対回転を抑制しながら動力を伝達するダンパとを含む動力出力装置を制御するものが提案されている(例えば、特許文献1参照)。この制御装置は、エンジン回転数センサの検出値から算出されたクランクシャフトの回転角速度を用いてエンジントルクを推定演算すると共に、推定演算したエンジントルクをダンパの捩れ角度を基に算出したダンパの弾性力からなる補正項によって補正し、補正後の推定エンジントルクに基づいてエンジンの異常を診断する。このように、ダンパの捩れ角度を基に算出したダンパの弾性力からなる補正項によって推定エンジントルクを補正することにより、電動発電機の回転状態に応じてエンジンのクランクシャフトに作用するダンパの弾性力を加味して推定エンジントルクをより精度良く算出することができ、当該推定エンジントルクに基づいてエンジンの異常をより正確に検出することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−29212号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の動力出力装置では、エンジンのトルク脈動やダンパ共振等に起因してエンジンの回転数が所定の周期で振動し、それによりエンジンのクランクシャフトにダンパや動力分割機構を介して接続された電動発電機の回転数も振動する。そして、エンジンと電動発電機との間にダンパが介在することから、ダンパの前後で回転数が変動し、エンジンの回転数振動と電動発電機の回転数振動との位相がズレることがある。このため、電動発電機でエンジンの回転数を制御するに際して、エンジンの回転数振動と電動発電機の回転数振動との位相のズレに起因してエンジンの回転数制御を精度良く行うことができず、エンジンからの振動や騒音を助長するおそれがある。
【0005】
本発明の動力出力装置の制御装置および制御方法は、エンジンの出力軸に少なくともねじれ要素を介して接続された電動機により当該エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の動力出力装置の制御装置および制御方法は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の動力出力装置の制御装置は、
動力を出力可能なエンジンと、該エンジンの出力軸に少なくともねじれ要素を介して接続されると共に該出力軸に動力を入出力可能な電動機とを備えた動力出力装置の制御装置において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御することを特徴とする。
【0008】
本発明の動力出力装置の制御装置では、エンジンが運転されるときに、電動機の回転数が取得されると共に、当該取得された回転数をねじれ要素のねじれ角に基づいて補正することにより制御用回転数が算出され、エンジンの目標エンジン回転数に基づいて設定される電動機の目標回転数と制御用回転数との差がなくなるように電動機が制御される。このように、ねじれ要素のねじれ角に基づいて電動機の回転数を補正して制御用回転数を設定することにより、エンジンの出力軸の回転数振動と電動機の制御用回転数の振動との位相のズレを抑制することができるため、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制することが可能となる。
【0009】
また、前記制御用回転数は、前記ねじれ角に基づいて前記ねじれ要素の入力回転数から出力回転数を減じて回転数差を算出し、該算出した回転数差の前記電動機の回転軸換算値を前記取得された前記電動機の回転数に加算することにより設定されてもよい。このように、ねじれ要素の入力回転数と出力回転数との回転数差に基づいて電動機の制御用回転数を設定することで、エンジンの出力軸の回転数振動の位相と制御用回転数の振動の位相と
のズレをより良好に抑制することができる。従って、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数を更に精度良く制御してエンジンからの振動や騒音をより一層良好に抑制することができる。
【0010】
更に、前記動力出力装置は、前記エンジンの出力軸に前記ねじれ要素を介して接続された第1の回転要素、前記電動機の回転軸に接続された第2の回転要素、および動力を入出力可能な第2電動機に接続された第3の回転要素を有する遊星歯車機構を更に備えてもよい。
【0011】
本発明の動力出力装置の制御方法は、
動力を出力可能なエンジンと、前記エンジンの出力軸に少なくともねじれ要素を介して接続された動力を入出力可能な電動機とを備えた動力出力装置の制御方法において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御するものである。
【0012】
本発明の動力出力装置の制御方法によれば、エンジンの出力軸の回転数振動と電動機の制御用回転数の振動との位相のズレを抑制することができるため、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制可能となる。
【図面の簡単な説明】
【0013】
【図1】本発明による動力出力装置の制御装置を含むハイブリッド車両の一例であるハイブリッド自動車20の概略構成図である。
【図2】エンジン22が運転されているときに、ハイブリッドECU70により所定時間毎に実行される駆動制御ルーチンの一例を示すフローチャートである。
【図3】要求トルク設定用マップの一例を示す説明図である。
【図4】エンジン22が運転されているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図5】駆動制御ルーチンを実行している際のエンジン22の回転数NeとモータMG1の回転数Nm1と制御用回転数Nmc1との時間変化の様子の一例を示すタイムチャートである。
【発明を実施するための形態】
【0014】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0015】
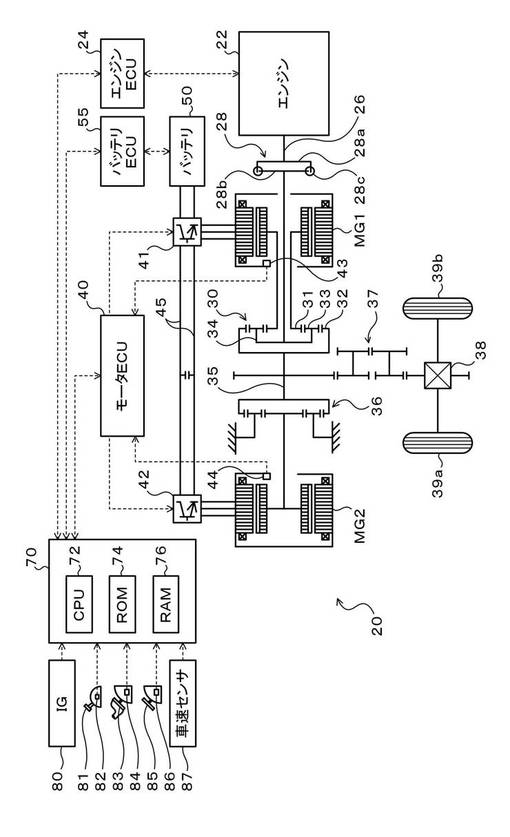
図1は、本発明による動力出力装置の制御装置を含むハイブリッド車両の一例であるハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、ガソリンや軽油といった炭化水素系の燃料を用いて動力を出力するエンジン(内燃機関)22と、シングルピニオン式のプラネタリギヤ30と、主として発電機として動作するモータMG1と、駆動輪39a,39bに伝達ギヤ機構37やデファレンシャルギヤ38を介して連結された駆動軸35にプラネタリギヤ式の減速ギヤ機構36を介して動力を入出力するモータMG2とを含む。
【0016】
更に、ハイブリッド自動車20は、エンジン22を制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、モータMG1およびMG2を駆動するためのインバータ41および42と、インバータ41および42に接続されたバッテリ50と、インバータ41および42を介してモータMG1およびMG2を制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)55と、エンジンECU24やモータECU40、バッテリECU55等と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを含む。
【0017】
エンジンECU24は、図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。エンジンECU24には、クランクシャフト26の回転位置を検出する図示しないクランクポジションセンサからのクランクポジションや、スロットルバルブの開度を検出する図示しないスロットル開度センサからのスロットル開度THといったエンジン22の状態を検出する種々のセンサからの信号が入力ポートを介して入力される。また、エンジンECU24からは、エンジン22の燃料噴射量や吸入空気量、点火時期等を制御するための制御信号等が出力される。エンジンECU24は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号や上記センサからの信号等に基づいてエンジン22を制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に送信する。更に、エンジンECU24は、クランクポジションセンサからの信号に基づいてクランクシャフト26の回転数、すなわちエンジン22の回転数Neを算出すると共に、例えば回転数Neや図示しないエアフローメータにより検出されるエンジン22の吸入空気量あるいはスロットル開度TH、予め定められたマップあるいは計算式に基づいてエンジン22から出力されているトルクの推定値であるエンジントルクTeestを算出する。
【0018】
プラネタリギヤ30は、モータMG1のロータ(回転軸)に接続されるサンギヤ(第2要素)31と、駆動軸35に接続されると共に減速ギヤ機構36を介してモータMG2のロータ(回転軸)に接続されるリングギヤ(第3要素)32と、複数のピニオンギヤ33を支持すると共にねじれ要素としてのダンパ28を介してエンジン22のクランクシャフト26に接続されるプラネタリキャリア(第1要素)34とを有する。プラネタリギヤ30は、モータMG1がエンジン22からの動力の少なくとも一部を用いて発電する発電機として機能する際にはプラネタリキャリア34に伝達されるエンジン22からの動力をサンギヤ31とリングギヤ32とにそのギヤ比に応じて分配する。また、プラネタリギヤ30は、モータMG1が電動機として機能する際にはプラネタリキャリア34に伝達されるエンジン22からの動力とサンギヤ31に伝達されるモータMG1からの動力を統合してリングギヤ32に出力する。リングギヤ32に出力された動力は、駆動軸35や伝達ギヤ機構37、デファレンシャルギヤ38等を介して最終的に駆動輪39a,39bに出力される。なお、ダンパ28は、少なくとも、クランクシャフト26に接続される入力要素28aと、プラネタリキャリア34に接続される出力要素28bと、入力要素28aと出力要素28bとの間に配置される複数の弾性体(スプリング)28cとを含む。
【0019】
モータMG1およびMG2は、周知の同期発電電動機として構成されており、それぞれインバータ41または42を介してバッテリ50と電力をやり取りする。インバータ41および42とバッテリ50とを接続する電力ライン45は、インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1およびMG2の一方により発電される電力を他方で消費可能とする。従って、バッテリ50は、モータMG1,MG2により発電または消費される電力に応じて充放電され、モータMG1およびMG2間で電力収支のバランスをとれば充放電されないことになる。
【0020】
モータECU40は、図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。モータECU40には、モータMG1,MG2のロータの回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力され、モータECU40からは、インバータ41および42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいてモータMG1およびMG2のロータの回転数Nm1およびNm2を算出する。更に、モータECU40は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてモータMG1およびMG2を制御すると共に必要に応じてモータMG1,MG2の状態に関するデータをハイブリッドECU70に送信する。
【0021】
バッテリ50は、例えば200〜300Vの定格出力電圧を有するリチウムイオン二次電池あるいはニッケル水素二次電池として構成されている。また、バッテリ50を管理するバッテリECU55も図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。更に、バッテリECU55は、ハイブリッドECU70やエンジンECU24と通信し、必要に応じてバッテリ50の状態に関するデータをハイブリッドECU70等に送信する。そして、バッテリECU55には、バッテリ50の端子間に設置された図示しない電圧センサからの充放電電圧(端子間電圧)Vb、バッテリ50の出力端子に接続された電力ラインに設置された図示しない電流センサからの充放電電流Ib、バッテリ50に設置された図示しない温度センサからのバッテリ温度Tb等が入力される。なお、充放電電圧Vbや充放電電流Ibは、放電側が正とされ、充電側が負とされる。
【0022】
更に、バッテリECU55は、電流センサからの充放電電流Ibの積算値を算出すると共に、当該積算値に基づいてバッテリ50の充電割合を示す残容量SOCを算出したり、残容量SOCに基づいてバッテリ50の目標充放電電力としての充放電要求パワーPb*(ここでは、放電側を正とし、充電側を負とする)を算出したりする。また、バッテリECU55は、残容量SOCとバッテリ温度Tbとに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出する。バッテリ50の入力制限Winは、バッテリ温度Tbに対応したベース値にバッテリ50の残容量SOCに対応した入力制限用補正係数を乗じることにより設定可能であり、出力制限Woutは、バッテリ温度Tbに対応したベース値にバッテリ50の残容量SOCに対応した出力制限用補正係数を乗じることにより設定可能である。
【0023】
ハイブリッドECU70は、CPU72を中心とするマイクロコンピュータとして構成されており、CPU72の他に各種プログラムを記憶するROM74、データを一時的に記憶するRAM76、図示しない入出力ポートおよび通信ポート等を有する。ハイブリッドECU70は、上述したようにエンジンECU24やモータECU40、バッテリECU55等と通信し、エンジンECU24やモータECU40、バッテリECU55等と各種信号やデータのやり取りを行う。また、ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置(シフトポジション)に対応したシフトレンジSRを検出するシフトレンジセンサ82からのシフトレンジSR、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度(アクセル操作量)Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速センサ87からの車速V等が入力ポートを介して入力される。
【0024】
上述のように構成されたハイブリッド自動車20では、アクセル開度Accと車速Vとに基づいて駆動軸35に出力すべき要求トルクTr*が計算され、この要求トルクTr*に応じたトルクが駆動軸35に出力されるようにエンジン22が制御されると共にモータMG1およびMG2のトルク指令Tm1*およびTm2*が設定される。エンジン22、モータMG1およびモータMG2の制御モードには、要求トルクTr*に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1およびMG2とによってトルク変換されて駆動軸35に出力されるようモータMG1およびMG2を制御するトルク変換運転モードや、要求トルクTr*とバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1およびMG2とによりトルク変換されることで要求トルクTr*に応じたトルクが駆動軸35に出力されるようモータMG1およびMG2を制御する充放電運転モードが含まれる。また、ハイブリッド自動車20では、トルク変換運転モードや充放電運転モードのもとで所定条件が成立した場合、エンジン22を自動的に停止・始動させる間欠運転が実行される。
【0025】
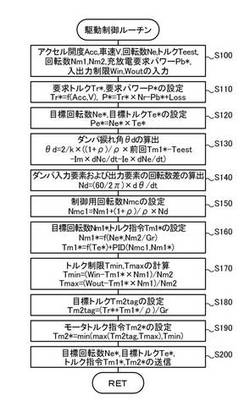
次に、上述のように構成されるハイブリッド自動車20の動作について説明する。図2は、エンジン22が運転されているときに、ハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行される駆動制御ルーチンの一例を示すフローチャートである。
【0026】
図2の駆動制御ルーチンの開始に際して、ハイブリッドECU70(CPU72)は、アクセルペダルポジションセンサ84からのアクセル開度Accや、車速センサ87からの車速V、エンジン22の回転数NeやエンジントルクTeest、モータMG1およびMG2の回転数Nm1およびNm2、バッテリ50の充放電要求パワーPb*、入力制限Winおよび出力制限Woutの値といった制御に必要なデータの入力処理を実行する(ステップS100)。エンジン22の回転数NeおよびエンジントルクTeestは、エンジンECU24から通信により入力され、モータMG1およびMG2の回転数Nm1およびNm2は、モータECU40から通信により入力され、バッテリ50の充放電要求パワーPb*、入力制限Winおよび出力制限Woutは、バッテリECU55から通信により入力される。
【0027】
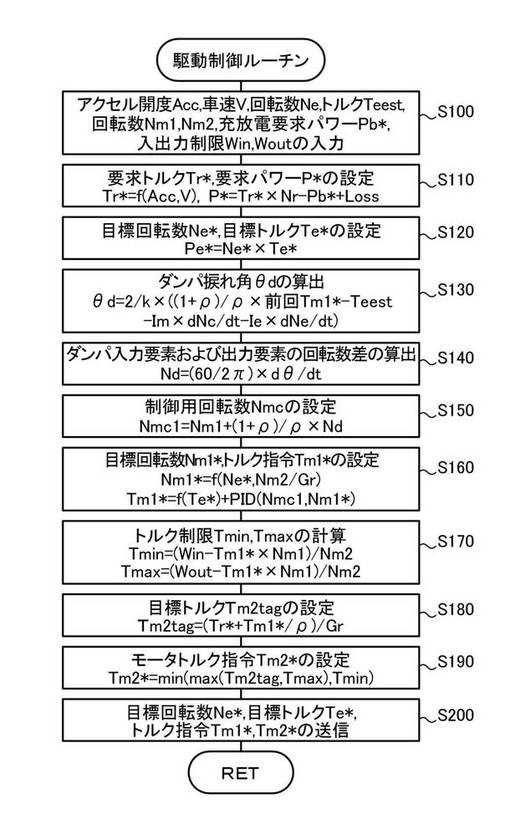
ステップS100のデータ入力処理の後、ハイブリッドECU70は、図3に例示する要求トルク設定用マップからステップS100にて入力したアクセル開度Accおよび車速Vに対応した値を導出して駆動軸35に出力すべき要求トルクTr*として設定した上で、エンジン22に出力させるパワーの指令値である要求パワーPe*を設定する(ステップS110)。要求パワーPe*は、ハイブリッド自動車20の走行に要求される要求走行パワーすなわち走行に要求される要求トルクTr*と駆動軸35の回転数Nr(モータMG2の回転数Nm2/減速ギヤ機構36のギヤ比Gr、または車速V×換算係数k)との積から充放電要求パワーPb*を減じた値に損失分Lossを加算することにより得られる。
【0028】
次いで、ハイブリッドECU70は、要求パワーPe*に基づいてエンジン22の目標運転ポイントである目標回転数Ne*および目標トルクTe*を設定する(ステップS120)。実施例では、エンジン22を効率良く動作させるために予め定められた動作ライン(図示省略)と要求パワーPe*とに基づいてエンジン22の目標回転数Ne*と目標トルクTe*とが設定される。動作ラインは、実験・解析を経て求められるエンジン要求パワーPe*ごとのエンジン22を最も効率良く動作させる動作点を結ぶことにより得られるものである。
【0029】
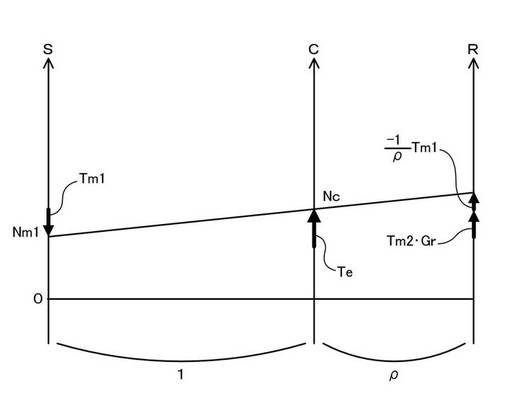
続いて、ハイブリッドECU70は、次式(1)に従ってダンパ28のねじれ角θd(rad)を算出する(ステップS130)。ここで、式(1)中の“k”は、ダンパ28のバネ定数であり、“ρ”は、プラネタリギヤ30のギヤ比(サンギヤ31の歯数/リングギヤ32の歯数)であり、“前回Tm1*”は、本ルーチンを実行直前に設定されているモータMG1のトルク指令値であり、“Im”は、ダンパ28よりも下流側の駆動部品のイナーシャであり、“dNc/dt”は、プラネタリギヤ30のプラネタリキャリア34の回転数Ncの時間微分値(駆動側角加速度)であり、“Ie”は、エンジン22のイナーシャであり、“dNe/dt”は、ステップS100にて入力したエンジン22の回転数Neの時間微分値(エンジン側角加速度)である。なお、“dt”としては、本ルーチンの実行周期が用いられ、プラネタリキャリア34の回転数Ncは、ステップS100にて入力したモータMG1,MG2の回転数Nm1,Nm2に基づいて次式(2)に従って算出される。そして、式(2)は、プラネタリギヤ30の回転要素に対する力学的な関係式であり、プラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す図4の共線図から容易に導出され得る。
【0030】
θd = 2/k×((1+ρ)/ρ×前回Tm1*-Teest-Im×dNc/dt-Ie×dNe/dt) …(1)
Nc =ρ/(1+ρ)×Nm1 +1/(1+ρ)×Nm2 …(2)
【0031】
ここで、式(1)に従って算出されたダンパ28のねじれ角θdは、次式(3)に示すように、ダンパ28の入力要素28aすなわちエンジン22のクランクシャフト26の回転角度θeからダンパ28の出力要素28bすなわちプラネタリギヤ30のプラネタリキャリア34の回転角度θcを減じた値に等しい。従って、次式(4)に示すように、ダンパ28のねじれ角θdを時間微分して値(60/2π)を乗じることにより、ダンパ28の入力回転数すなわちエンジン22のクランクシャフト26の回転数Ne(rpm)と、ダンパ28の出力回転数すなわちプラネタリギヤ30のプラネタリキャリア34の回転数Nc(rpm)との回転数差Nd(rpm)を算出することができる(ステップS140)。
【0032】
θd = θe - θc …(3)
Nd = 60/2π×dθd/dt = 60/2π×dθe/dt - 60/2π×dθc/dt = Ne‐Nc …(4)
【0033】
このようにしてエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndを算出した後、ハイブリッドECU70は、次式(5)に従って制御用回転数Nmc1を設定する(ステップS150)。ただし、式(5)中の右辺第2項の“ (1+ρ)/ρ×Nd”は、エンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndのプラネタリギヤ30のサンギヤ31軸換算値、すなわちモータMG1の回転軸換算値を示す。
【0034】
Nmc1 = Nm1 + (1+ρ)/ρ×Nd …(5)
【0035】
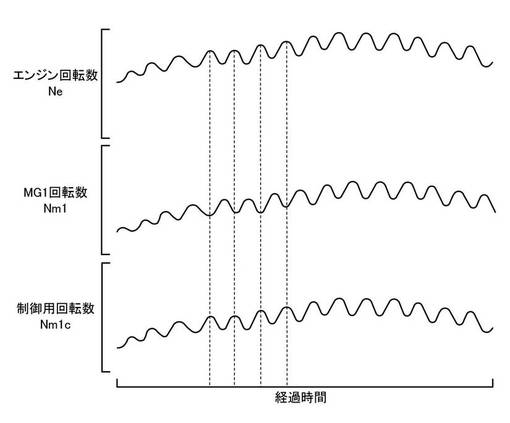
ここで、図5に、エンジン22が運転されている際のエンジン22の回転数NeとモータMG1の回転数Nm1と制御用回転数Nmc1との時間変化の様子の一例を示す。図示するように、実施例のハイブリッド自動車20では、エンジン22のトルク脈動やダンパ28の共振等に起因してエンジン22の回転数Neが所定の周期で振動し、それによりエンジン22のクランクシャフト26にダンパ28やプラネタリギヤ30を介して接続されたモータMG1の回転数Nm1も振動する。そして、エンジン22とモータMG1との間にダンパ28が介在することから、ダンパ28の入力要素28aおよび出力要素28bの間、すなわちエンジン22のクランクシャフト26とプラネタリギヤ30のプラネタリキャリア34との間で回転数が変動し、それによりエンジン22の回転数振動とモータMG1の回転数振動との位相がズレることがある。このため、実施例のハイブリッド自動車20では、上記式(5)に示すようにステップS100にて入力したモータMG1の回転数Nm1にエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差NdのモータMG1の回転軸換算値を加算することにより制御用回転数Nmc1を設定する。これにより、図5に示すように、制御用回転数Nmc1の振動の位相とエンジン22のクランクシャフト26の回転数振動の位相とのズレを良好に抑制することができる。
【0036】
そして、ハイブリッドECU70は、回転数指令Ne*と駆動軸35の回転数Nr(Nm2/Grまたはk×V)とプラネタリギヤ30のギヤ比ρとを用いて次式(6)に従いモータMG1の目標回転数Nm1*を算出した上で、エンジン22の目標トルクTe*や目標回転数Nm1*、ステップS150にて設定した制御用回転数Nmc1等を用いて次式(7)に従いモータMG1に対するトルク指令Tm1*を設定する(ステップS160)。式(6)は、プラネタリキャリア34の回転数Ncとエンジン22の回転数Neとを同一の値と仮定した場合に、図4の共線図から導き出されるものである。そして、式(7)は、モータMG1のエンジン22の回転数指令Ne*に対応した目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにするためのフィードバック制御における関係式であり、式(7)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。このように、ダンパ28のねじれ角θdを考慮した制御用回転数Nmc1と、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1をフィードバック制御することで、エンジン22の回転数Neをより精度良く制御し、エンジン22からの振動や騒音を良好に抑制することが可能となる。
【0037】
Nm1*=Ne*×(1+ρ)/ρ-Nm2/(Gr×ρ) …(6)
Tm1*=-ρ/(1+ρ)×Te*+k1×(Nm1*-Nmc1)+k2×∫(Nm1*-Nmc1)dt …(7)
【0038】
モータMG1に対するトルク指令Tm1*を設定した後、ハイブリッドECU70は、バッテリ50の入出力制限Win,Woutとトルク指令Tm1*とモータMG1,MG2の現在の回転数Nm1,Nm2とを用いてモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(8)および(9)に従い算出する(ステップS170)。更に、ハイブリッドECU70は、要求トルクTr*とトルク指令Tm1*とプラネタリギヤ30のギヤ比ρと減速ギヤ機構36のギヤ比Grとを用いてモータMG2から出力すべきトルクの目標値である目標トルクTm2tagを次式(10)に従い算出する(ステップS180)。そして、モータMG2に対するトルク指令Tm2*をトルク制限Tmin,Tmaxにより目標トルクTm2tagを制限した値に設定する(ステップS190)。これにより、モータMG2から駆動軸35に出力されるトルクをバッテリ50の入出力制限Win,Woutの範囲内に制限することができる。なお、式(10)も上述の共線図から容易に導出され得るものである。
【0039】
Tmin=(Win-Tm1*×Nm1)/Nm2 …(8)
Tmax=(Wout-Tm1*×Nm1)/Nm2 …(9)
Tm2tag=(Tr*+Tm1*/ρ)/Gr …(10)
【0040】
モータMG1,MG2に対するトルク指令Tm1*,Tm2*を設定した後、ハイブリッドECU70は、エンジン22の回転数指令Ne*および目標トルクTe*をエンジンECU24に送信すると共に、モータMG1およびMG2のトルク指令Tm1*,Tm2*をモータECU40にそれぞれ送信し(ステップS200)、本ルーチンを一旦終了させる。ハイブリッドECU70から回転数指令Ne*と目標トルクTe*とを受信したエンジンECU24は、回転数指令Ne*と目標トルクTe*とに基づいて吸入空気量制御や燃料噴射制御、点火時期制御等を実行する。これにより、エンジン22は、目標トルクTe*に応じたトルクを出力するように運転されることになる。また、ハイブリッドECU70からトルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0041】
以上説明したように、実施例のハイブリッド自動車20では、エンジン22が運転されるときに、モータMG1の回転数Nm1が取得されると共に、取得された回転数Nm1をダンパ28のねじれ角θdに基づいて補正することにより制御用回転数Nmc1が算出され、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにモータMG1が制御される。このように、ダンパ28のねじれ角θdに基づいてモータMG1の回転数Nm1を補正して制御用回転数Nmc1を設定することにより、エンジン22のクランクシャフト26(出力軸)の回転数振動とモータMG1の制御用回転数Nmc1の振動との位相のズレをより良好に抑制することができるため、当該制御用回転数Nmc1とモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1を制御することで、エンジン22の回転数Neをより精度良く制御してエンジン22からの振動や騒音をより良好に抑制することが可能となる。
【0042】
また、上記実施例において、制御用回転数Nmc1は、ねじれ角θdに基づいてダンパ28の入力要素28aおよび出力要素28b、すなわちエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndを算出し、算出された回転数差NdのモータMG1の回転軸換算値をモータMG1の回転数Nm1に加算することにより設定される。このように、ダンパ28の入力回転数と出力回転数との回転数差Ndに基づいてモータMG1の制御用回転数Nmc1を設定することで、エンジン22のクランクシャフトの回転数振動の位相と制御用回転数Nmc1の振動の位相とのズレをより良好に抑制することができる。従って、制御用回転数Nmc1とモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1を制御することで、エンジン22の回転数Neを更に精度良く制御してエンジン22からの振動や騒音をより一層良好に抑制することができる。
【0043】
なお、上記ハイブリッド自動車20は、モータMG1の回転軸に接続されるサンギヤ31と、駆動輪DWに連結される駆動軸35に接続されるリングギヤ32と、エンジン22のクランクシャフト23に接続されるプラネタリキャリア34とを有するプラネタリギヤ30を含むものであるが、本発明の適用対象は、これに限られるものではない。すなわち、プラネタリギヤ30の回転要素に対して上述のようにエンジン22やモータMG1およびMG2を接続する代わりに、プラネタリギヤ30のサンギヤ31にモータMG2の回転軸を接続し、リングギヤ32にモータMG1の回転軸を接続すると共にエンジン22のクランクシャフト23をダンパを介して接続し、かつプラネタリキャリア34に駆動輪DWに連結される駆動軸を接続してもよい。また、本発明が適用されるハイブリッド車両は、いわゆる1モータ式のハイブリッド車両であってもよい。更に、上述のハイブリッド自動車20において、減速ギヤ機構36の代わりに、例えば複数のプラネタリギヤを含むと共にHi,Loの2段の変速段あるいは3段以上の変速段を有し、モータMG2の回転数を変速して駆動軸35に伝達する変速機が採用されてもよい。
【0044】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、動力を出力可能なエンジン22が「エンジン」に相当し、エンジン22のクランクシャフト26(出力軸)に少なくともダンパ28(ねじれ要素)を介して接続されると共にクランクシャフト26に動力を入出力可能なモータMG1が「電動機」に相当する。ただし、実施例の主要な要素と課題を解決するための手段の欄に記載された発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載された発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載された発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載された発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0045】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0046】
本発明は、動力出力装置やハイブリッド車両等の製造産業等において利用可能である。
【符号の説明】
【0047】
20、20B ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、33 ピニオンギヤ、34 プラネタリキャリア、35 駆動軸、36 減速ギヤ機構、37 伝達ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42,49 インバータ、43,44 回転位置検出センサ、45 電力ライン、50 バッテリ、55 バッテリ用電子制御ユニット(バッテリECU)、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、72 CPU、74 ROM、76 RAM、81 シフトレバー、82 シフトレンジセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルストロークセンサ、87 車速センサ、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、動力を出力可能なエンジンと、エンジンの出力軸に少なくともねじれ要素を介して接続された電動機とを備えた動力出力装置の制御装置および制御方法に関する。
【背景技術】
【0002】
従来、この種の動力出力装置の制御装置としては、エンジンからの動力を受ける入力軸、電動発電機の回転軸および駆動軸を機械的に結合すると共にエンジンからの動力を電動発電機および駆動軸に機械的に分配するように構成された動力分割機構と、エンジンの出力軸および動力分割機構の入力軸の間に結合されると共にエンジンの出力軸と動力分割機構の入力軸との相対回転を抑制しながら動力を伝達するダンパとを含む動力出力装置を制御するものが提案されている(例えば、特許文献1参照)。この制御装置は、エンジン回転数センサの検出値から算出されたクランクシャフトの回転角速度を用いてエンジントルクを推定演算すると共に、推定演算したエンジントルクをダンパの捩れ角度を基に算出したダンパの弾性力からなる補正項によって補正し、補正後の推定エンジントルクに基づいてエンジンの異常を診断する。このように、ダンパの捩れ角度を基に算出したダンパの弾性力からなる補正項によって推定エンジントルクを補正することにより、電動発電機の回転状態に応じてエンジンのクランクシャフトに作用するダンパの弾性力を加味して推定エンジントルクをより精度良く算出することができ、当該推定エンジントルクに基づいてエンジンの異常をより正確に検出することが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−29212号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の動力出力装置では、エンジンのトルク脈動やダンパ共振等に起因してエンジンの回転数が所定の周期で振動し、それによりエンジンのクランクシャフトにダンパや動力分割機構を介して接続された電動発電機の回転数も振動する。そして、エンジンと電動発電機との間にダンパが介在することから、ダンパの前後で回転数が変動し、エンジンの回転数振動と電動発電機の回転数振動との位相がズレることがある。このため、電動発電機でエンジンの回転数を制御するに際して、エンジンの回転数振動と電動発電機の回転数振動との位相のズレに起因してエンジンの回転数制御を精度良く行うことができず、エンジンからの振動や騒音を助長するおそれがある。
【0005】
本発明の動力出力装置の制御装置および制御方法は、エンジンの出力軸に少なくともねじれ要素を介して接続された電動機により当該エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明の動力出力装置の制御装置および制御方法は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明の動力出力装置の制御装置は、
動力を出力可能なエンジンと、該エンジンの出力軸に少なくともねじれ要素を介して接続されると共に該出力軸に動力を入出力可能な電動機とを備えた動力出力装置の制御装置において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御することを特徴とする。
【0008】
本発明の動力出力装置の制御装置では、エンジンが運転されるときに、電動機の回転数が取得されると共に、当該取得された回転数をねじれ要素のねじれ角に基づいて補正することにより制御用回転数が算出され、エンジンの目標エンジン回転数に基づいて設定される電動機の目標回転数と制御用回転数との差がなくなるように電動機が制御される。このように、ねじれ要素のねじれ角に基づいて電動機の回転数を補正して制御用回転数を設定することにより、エンジンの出力軸の回転数振動と電動機の制御用回転数の振動との位相のズレを抑制することができるため、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制することが可能となる。
【0009】
また、前記制御用回転数は、前記ねじれ角に基づいて前記ねじれ要素の入力回転数から出力回転数を減じて回転数差を算出し、該算出した回転数差の前記電動機の回転軸換算値を前記取得された前記電動機の回転数に加算することにより設定されてもよい。このように、ねじれ要素の入力回転数と出力回転数との回転数差に基づいて電動機の制御用回転数を設定することで、エンジンの出力軸の回転数振動の位相と制御用回転数の振動の位相と
のズレをより良好に抑制することができる。従って、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数を更に精度良く制御してエンジンからの振動や騒音をより一層良好に抑制することができる。
【0010】
更に、前記動力出力装置は、前記エンジンの出力軸に前記ねじれ要素を介して接続された第1の回転要素、前記電動機の回転軸に接続された第2の回転要素、および動力を入出力可能な第2電動機に接続された第3の回転要素を有する遊星歯車機構を更に備えてもよい。
【0011】
本発明の動力出力装置の制御方法は、
動力を出力可能なエンジンと、前記エンジンの出力軸に少なくともねじれ要素を介して接続された動力を入出力可能な電動機とを備えた動力出力装置の制御方法において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御するものである。
【0012】
本発明の動力出力装置の制御方法によれば、エンジンの出力軸の回転数振動と電動機の制御用回転数の振動との位相のズレを抑制することができるため、当該制御用回転数と電動機の目標回転数との差がなくなるように電動機を制御することで、エンジンの回転数をより精度良く制御してエンジンからの振動や騒音をより良好に抑制可能となる。
【図面の簡単な説明】
【0013】
【図1】本発明による動力出力装置の制御装置を含むハイブリッド車両の一例であるハイブリッド自動車20の概略構成図である。
【図2】エンジン22が運転されているときに、ハイブリッドECU70により所定時間毎に実行される駆動制御ルーチンの一例を示すフローチャートである。
【図3】要求トルク設定用マップの一例を示す説明図である。
【図4】エンジン22が運転されているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図5】駆動制御ルーチンを実行している際のエンジン22の回転数NeとモータMG1の回転数Nm1と制御用回転数Nmc1との時間変化の様子の一例を示すタイムチャートである。
【発明を実施するための形態】
【0014】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0015】
図1は、本発明による動力出力装置の制御装置を含むハイブリッド車両の一例であるハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、ガソリンや軽油といった炭化水素系の燃料を用いて動力を出力するエンジン(内燃機関)22と、シングルピニオン式のプラネタリギヤ30と、主として発電機として動作するモータMG1と、駆動輪39a,39bに伝達ギヤ機構37やデファレンシャルギヤ38を介して連結された駆動軸35にプラネタリギヤ式の減速ギヤ機構36を介して動力を入出力するモータMG2とを含む。
【0016】
更に、ハイブリッド自動車20は、エンジン22を制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、モータMG1およびMG2を駆動するためのインバータ41および42と、インバータ41および42に接続されたバッテリ50と、インバータ41および42を介してモータMG1およびMG2を制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)55と、エンジンECU24やモータECU40、バッテリECU55等と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを含む。
【0017】
エンジンECU24は、図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。エンジンECU24には、クランクシャフト26の回転位置を検出する図示しないクランクポジションセンサからのクランクポジションや、スロットルバルブの開度を検出する図示しないスロットル開度センサからのスロットル開度THといったエンジン22の状態を検出する種々のセンサからの信号が入力ポートを介して入力される。また、エンジンECU24からは、エンジン22の燃料噴射量や吸入空気量、点火時期等を制御するための制御信号等が出力される。エンジンECU24は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号や上記センサからの信号等に基づいてエンジン22を制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に送信する。更に、エンジンECU24は、クランクポジションセンサからの信号に基づいてクランクシャフト26の回転数、すなわちエンジン22の回転数Neを算出すると共に、例えば回転数Neや図示しないエアフローメータにより検出されるエンジン22の吸入空気量あるいはスロットル開度TH、予め定められたマップあるいは計算式に基づいてエンジン22から出力されているトルクの推定値であるエンジントルクTeestを算出する。
【0018】
プラネタリギヤ30は、モータMG1のロータ(回転軸)に接続されるサンギヤ(第2要素)31と、駆動軸35に接続されると共に減速ギヤ機構36を介してモータMG2のロータ(回転軸)に接続されるリングギヤ(第3要素)32と、複数のピニオンギヤ33を支持すると共にねじれ要素としてのダンパ28を介してエンジン22のクランクシャフト26に接続されるプラネタリキャリア(第1要素)34とを有する。プラネタリギヤ30は、モータMG1がエンジン22からの動力の少なくとも一部を用いて発電する発電機として機能する際にはプラネタリキャリア34に伝達されるエンジン22からの動力をサンギヤ31とリングギヤ32とにそのギヤ比に応じて分配する。また、プラネタリギヤ30は、モータMG1が電動機として機能する際にはプラネタリキャリア34に伝達されるエンジン22からの動力とサンギヤ31に伝達されるモータMG1からの動力を統合してリングギヤ32に出力する。リングギヤ32に出力された動力は、駆動軸35や伝達ギヤ機構37、デファレンシャルギヤ38等を介して最終的に駆動輪39a,39bに出力される。なお、ダンパ28は、少なくとも、クランクシャフト26に接続される入力要素28aと、プラネタリキャリア34に接続される出力要素28bと、入力要素28aと出力要素28bとの間に配置される複数の弾性体(スプリング)28cとを含む。
【0019】
モータMG1およびMG2は、周知の同期発電電動機として構成されており、それぞれインバータ41または42を介してバッテリ50と電力をやり取りする。インバータ41および42とバッテリ50とを接続する電力ライン45は、インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1およびMG2の一方により発電される電力を他方で消費可能とする。従って、バッテリ50は、モータMG1,MG2により発電または消費される電力に応じて充放電され、モータMG1およびMG2間で電力収支のバランスをとれば充放電されないことになる。
【0020】
モータECU40は、図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。モータECU40には、モータMG1,MG2のロータの回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力され、モータECU40からは、インバータ41および42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいてモータMG1およびMG2のロータの回転数Nm1およびNm2を算出する。更に、モータECU40は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてモータMG1およびMG2を制御すると共に必要に応じてモータMG1,MG2の状態に関するデータをハイブリッドECU70に送信する。
【0021】
バッテリ50は、例えば200〜300Vの定格出力電圧を有するリチウムイオン二次電池あるいはニッケル水素二次電池として構成されている。また、バッテリ50を管理するバッテリECU55も図示しないCPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート(何れも図示せず)等を有する。更に、バッテリECU55は、ハイブリッドECU70やエンジンECU24と通信し、必要に応じてバッテリ50の状態に関するデータをハイブリッドECU70等に送信する。そして、バッテリECU55には、バッテリ50の端子間に設置された図示しない電圧センサからの充放電電圧(端子間電圧)Vb、バッテリ50の出力端子に接続された電力ラインに設置された図示しない電流センサからの充放電電流Ib、バッテリ50に設置された図示しない温度センサからのバッテリ温度Tb等が入力される。なお、充放電電圧Vbや充放電電流Ibは、放電側が正とされ、充電側が負とされる。
【0022】
更に、バッテリECU55は、電流センサからの充放電電流Ibの積算値を算出すると共に、当該積算値に基づいてバッテリ50の充電割合を示す残容量SOCを算出したり、残容量SOCに基づいてバッテリ50の目標充放電電力としての充放電要求パワーPb*(ここでは、放電側を正とし、充電側を負とする)を算出したりする。また、バッテリECU55は、残容量SOCとバッテリ温度Tbとに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出する。バッテリ50の入力制限Winは、バッテリ温度Tbに対応したベース値にバッテリ50の残容量SOCに対応した入力制限用補正係数を乗じることにより設定可能であり、出力制限Woutは、バッテリ温度Tbに対応したベース値にバッテリ50の残容量SOCに対応した出力制限用補正係数を乗じることにより設定可能である。
【0023】
ハイブリッドECU70は、CPU72を中心とするマイクロコンピュータとして構成されており、CPU72の他に各種プログラムを記憶するROM74、データを一時的に記憶するRAM76、図示しない入出力ポートおよび通信ポート等を有する。ハイブリッドECU70は、上述したようにエンジンECU24やモータECU40、バッテリECU55等と通信し、エンジンECU24やモータECU40、バッテリECU55等と各種信号やデータのやり取りを行う。また、ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置(シフトポジション)に対応したシフトレンジSRを検出するシフトレンジセンサ82からのシフトレンジSR、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度(アクセル操作量)Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速センサ87からの車速V等が入力ポートを介して入力される。
【0024】
上述のように構成されたハイブリッド自動車20では、アクセル開度Accと車速Vとに基づいて駆動軸35に出力すべき要求トルクTr*が計算され、この要求トルクTr*に応じたトルクが駆動軸35に出力されるようにエンジン22が制御されると共にモータMG1およびMG2のトルク指令Tm1*およびTm2*が設定される。エンジン22、モータMG1およびモータMG2の制御モードには、要求トルクTr*に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1およびMG2とによってトルク変換されて駆動軸35に出力されるようモータMG1およびMG2を制御するトルク変換運転モードや、要求トルクTr*とバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1およびMG2とによりトルク変換されることで要求トルクTr*に応じたトルクが駆動軸35に出力されるようモータMG1およびMG2を制御する充放電運転モードが含まれる。また、ハイブリッド自動車20では、トルク変換運転モードや充放電運転モードのもとで所定条件が成立した場合、エンジン22を自動的に停止・始動させる間欠運転が実行される。
【0025】
次に、上述のように構成されるハイブリッド自動車20の動作について説明する。図2は、エンジン22が運転されているときに、ハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行される駆動制御ルーチンの一例を示すフローチャートである。
【0026】
図2の駆動制御ルーチンの開始に際して、ハイブリッドECU70(CPU72)は、アクセルペダルポジションセンサ84からのアクセル開度Accや、車速センサ87からの車速V、エンジン22の回転数NeやエンジントルクTeest、モータMG1およびMG2の回転数Nm1およびNm2、バッテリ50の充放電要求パワーPb*、入力制限Winおよび出力制限Woutの値といった制御に必要なデータの入力処理を実行する(ステップS100)。エンジン22の回転数NeおよびエンジントルクTeestは、エンジンECU24から通信により入力され、モータMG1およびMG2の回転数Nm1およびNm2は、モータECU40から通信により入力され、バッテリ50の充放電要求パワーPb*、入力制限Winおよび出力制限Woutは、バッテリECU55から通信により入力される。
【0027】
ステップS100のデータ入力処理の後、ハイブリッドECU70は、図3に例示する要求トルク設定用マップからステップS100にて入力したアクセル開度Accおよび車速Vに対応した値を導出して駆動軸35に出力すべき要求トルクTr*として設定した上で、エンジン22に出力させるパワーの指令値である要求パワーPe*を設定する(ステップS110)。要求パワーPe*は、ハイブリッド自動車20の走行に要求される要求走行パワーすなわち走行に要求される要求トルクTr*と駆動軸35の回転数Nr(モータMG2の回転数Nm2/減速ギヤ機構36のギヤ比Gr、または車速V×換算係数k)との積から充放電要求パワーPb*を減じた値に損失分Lossを加算することにより得られる。
【0028】
次いで、ハイブリッドECU70は、要求パワーPe*に基づいてエンジン22の目標運転ポイントである目標回転数Ne*および目標トルクTe*を設定する(ステップS120)。実施例では、エンジン22を効率良く動作させるために予め定められた動作ライン(図示省略)と要求パワーPe*とに基づいてエンジン22の目標回転数Ne*と目標トルクTe*とが設定される。動作ラインは、実験・解析を経て求められるエンジン要求パワーPe*ごとのエンジン22を最も効率良く動作させる動作点を結ぶことにより得られるものである。
【0029】
続いて、ハイブリッドECU70は、次式(1)に従ってダンパ28のねじれ角θd(rad)を算出する(ステップS130)。ここで、式(1)中の“k”は、ダンパ28のバネ定数であり、“ρ”は、プラネタリギヤ30のギヤ比(サンギヤ31の歯数/リングギヤ32の歯数)であり、“前回Tm1*”は、本ルーチンを実行直前に設定されているモータMG1のトルク指令値であり、“Im”は、ダンパ28よりも下流側の駆動部品のイナーシャであり、“dNc/dt”は、プラネタリギヤ30のプラネタリキャリア34の回転数Ncの時間微分値(駆動側角加速度)であり、“Ie”は、エンジン22のイナーシャであり、“dNe/dt”は、ステップS100にて入力したエンジン22の回転数Neの時間微分値(エンジン側角加速度)である。なお、“dt”としては、本ルーチンの実行周期が用いられ、プラネタリキャリア34の回転数Ncは、ステップS100にて入力したモータMG1,MG2の回転数Nm1,Nm2に基づいて次式(2)に従って算出される。そして、式(2)は、プラネタリギヤ30の回転要素に対する力学的な関係式であり、プラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す図4の共線図から容易に導出され得る。
【0030】
θd = 2/k×((1+ρ)/ρ×前回Tm1*-Teest-Im×dNc/dt-Ie×dNe/dt) …(1)
Nc =ρ/(1+ρ)×Nm1 +1/(1+ρ)×Nm2 …(2)
【0031】
ここで、式(1)に従って算出されたダンパ28のねじれ角θdは、次式(3)に示すように、ダンパ28の入力要素28aすなわちエンジン22のクランクシャフト26の回転角度θeからダンパ28の出力要素28bすなわちプラネタリギヤ30のプラネタリキャリア34の回転角度θcを減じた値に等しい。従って、次式(4)に示すように、ダンパ28のねじれ角θdを時間微分して値(60/2π)を乗じることにより、ダンパ28の入力回転数すなわちエンジン22のクランクシャフト26の回転数Ne(rpm)と、ダンパ28の出力回転数すなわちプラネタリギヤ30のプラネタリキャリア34の回転数Nc(rpm)との回転数差Nd(rpm)を算出することができる(ステップS140)。
【0032】
θd = θe - θc …(3)
Nd = 60/2π×dθd/dt = 60/2π×dθe/dt - 60/2π×dθc/dt = Ne‐Nc …(4)
【0033】
このようにしてエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndを算出した後、ハイブリッドECU70は、次式(5)に従って制御用回転数Nmc1を設定する(ステップS150)。ただし、式(5)中の右辺第2項の“ (1+ρ)/ρ×Nd”は、エンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndのプラネタリギヤ30のサンギヤ31軸換算値、すなわちモータMG1の回転軸換算値を示す。
【0034】
Nmc1 = Nm1 + (1+ρ)/ρ×Nd …(5)
【0035】
ここで、図5に、エンジン22が運転されている際のエンジン22の回転数NeとモータMG1の回転数Nm1と制御用回転数Nmc1との時間変化の様子の一例を示す。図示するように、実施例のハイブリッド自動車20では、エンジン22のトルク脈動やダンパ28の共振等に起因してエンジン22の回転数Neが所定の周期で振動し、それによりエンジン22のクランクシャフト26にダンパ28やプラネタリギヤ30を介して接続されたモータMG1の回転数Nm1も振動する。そして、エンジン22とモータMG1との間にダンパ28が介在することから、ダンパ28の入力要素28aおよび出力要素28bの間、すなわちエンジン22のクランクシャフト26とプラネタリギヤ30のプラネタリキャリア34との間で回転数が変動し、それによりエンジン22の回転数振動とモータMG1の回転数振動との位相がズレることがある。このため、実施例のハイブリッド自動車20では、上記式(5)に示すようにステップS100にて入力したモータMG1の回転数Nm1にエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差NdのモータMG1の回転軸換算値を加算することにより制御用回転数Nmc1を設定する。これにより、図5に示すように、制御用回転数Nmc1の振動の位相とエンジン22のクランクシャフト26の回転数振動の位相とのズレを良好に抑制することができる。
【0036】
そして、ハイブリッドECU70は、回転数指令Ne*と駆動軸35の回転数Nr(Nm2/Grまたはk×V)とプラネタリギヤ30のギヤ比ρとを用いて次式(6)に従いモータMG1の目標回転数Nm1*を算出した上で、エンジン22の目標トルクTe*や目標回転数Nm1*、ステップS150にて設定した制御用回転数Nmc1等を用いて次式(7)に従いモータMG1に対するトルク指令Tm1*を設定する(ステップS160)。式(6)は、プラネタリキャリア34の回転数Ncとエンジン22の回転数Neとを同一の値と仮定した場合に、図4の共線図から導き出されるものである。そして、式(7)は、モータMG1のエンジン22の回転数指令Ne*に対応した目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにするためのフィードバック制御における関係式であり、式(7)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。このように、ダンパ28のねじれ角θdを考慮した制御用回転数Nmc1と、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1をフィードバック制御することで、エンジン22の回転数Neをより精度良く制御し、エンジン22からの振動や騒音を良好に抑制することが可能となる。
【0037】
Nm1*=Ne*×(1+ρ)/ρ-Nm2/(Gr×ρ) …(6)
Tm1*=-ρ/(1+ρ)×Te*+k1×(Nm1*-Nmc1)+k2×∫(Nm1*-Nmc1)dt …(7)
【0038】
モータMG1に対するトルク指令Tm1*を設定した後、ハイブリッドECU70は、バッテリ50の入出力制限Win,Woutとトルク指令Tm1*とモータMG1,MG2の現在の回転数Nm1,Nm2とを用いてモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(8)および(9)に従い算出する(ステップS170)。更に、ハイブリッドECU70は、要求トルクTr*とトルク指令Tm1*とプラネタリギヤ30のギヤ比ρと減速ギヤ機構36のギヤ比Grとを用いてモータMG2から出力すべきトルクの目標値である目標トルクTm2tagを次式(10)に従い算出する(ステップS180)。そして、モータMG2に対するトルク指令Tm2*をトルク制限Tmin,Tmaxにより目標トルクTm2tagを制限した値に設定する(ステップS190)。これにより、モータMG2から駆動軸35に出力されるトルクをバッテリ50の入出力制限Win,Woutの範囲内に制限することができる。なお、式(10)も上述の共線図から容易に導出され得るものである。
【0039】
Tmin=(Win-Tm1*×Nm1)/Nm2 …(8)
Tmax=(Wout-Tm1*×Nm1)/Nm2 …(9)
Tm2tag=(Tr*+Tm1*/ρ)/Gr …(10)
【0040】
モータMG1,MG2に対するトルク指令Tm1*,Tm2*を設定した後、ハイブリッドECU70は、エンジン22の回転数指令Ne*および目標トルクTe*をエンジンECU24に送信すると共に、モータMG1およびMG2のトルク指令Tm1*,Tm2*をモータECU40にそれぞれ送信し(ステップS200)、本ルーチンを一旦終了させる。ハイブリッドECU70から回転数指令Ne*と目標トルクTe*とを受信したエンジンECU24は、回転数指令Ne*と目標トルクTe*とに基づいて吸入空気量制御や燃料噴射制御、点火時期制御等を実行する。これにより、エンジン22は、目標トルクTe*に応じたトルクを出力するように運転されることになる。また、ハイブリッドECU70からトルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0041】
以上説明したように、実施例のハイブリッド自動車20では、エンジン22が運転されるときに、モータMG1の回転数Nm1が取得されると共に、取得された回転数Nm1をダンパ28のねじれ角θdに基づいて補正することにより制御用回転数Nmc1が算出され、エンジン22の目標回転数Ne*に基づいて設定されるモータMG1の目標回転数Nm1*と制御用回転数Nmc1との差がなくなるようにモータMG1が制御される。このように、ダンパ28のねじれ角θdに基づいてモータMG1の回転数Nm1を補正して制御用回転数Nmc1を設定することにより、エンジン22のクランクシャフト26(出力軸)の回転数振動とモータMG1の制御用回転数Nmc1の振動との位相のズレをより良好に抑制することができるため、当該制御用回転数Nmc1とモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1を制御することで、エンジン22の回転数Neをより精度良く制御してエンジン22からの振動や騒音をより良好に抑制することが可能となる。
【0042】
また、上記実施例において、制御用回転数Nmc1は、ねじれ角θdに基づいてダンパ28の入力要素28aおよび出力要素28b、すなわちエンジン22のクランクシャフト26の回転数Neとプラネタリキャリア34の回転数Ncとの回転数差Ndを算出し、算出された回転数差NdのモータMG1の回転軸換算値をモータMG1の回転数Nm1に加算することにより設定される。このように、ダンパ28の入力回転数と出力回転数との回転数差Ndに基づいてモータMG1の制御用回転数Nmc1を設定することで、エンジン22のクランクシャフトの回転数振動の位相と制御用回転数Nmc1の振動の位相とのズレをより良好に抑制することができる。従って、制御用回転数Nmc1とモータMG1の目標回転数Nm1*との差がなくなるようにモータMG1を制御することで、エンジン22の回転数Neを更に精度良く制御してエンジン22からの振動や騒音をより一層良好に抑制することができる。
【0043】
なお、上記ハイブリッド自動車20は、モータMG1の回転軸に接続されるサンギヤ31と、駆動輪DWに連結される駆動軸35に接続されるリングギヤ32と、エンジン22のクランクシャフト23に接続されるプラネタリキャリア34とを有するプラネタリギヤ30を含むものであるが、本発明の適用対象は、これに限られるものではない。すなわち、プラネタリギヤ30の回転要素に対して上述のようにエンジン22やモータMG1およびMG2を接続する代わりに、プラネタリギヤ30のサンギヤ31にモータMG2の回転軸を接続し、リングギヤ32にモータMG1の回転軸を接続すると共にエンジン22のクランクシャフト23をダンパを介して接続し、かつプラネタリキャリア34に駆動輪DWに連結される駆動軸を接続してもよい。また、本発明が適用されるハイブリッド車両は、いわゆる1モータ式のハイブリッド車両であってもよい。更に、上述のハイブリッド自動車20において、減速ギヤ機構36の代わりに、例えば複数のプラネタリギヤを含むと共にHi,Loの2段の変速段あるいは3段以上の変速段を有し、モータMG2の回転数を変速して駆動軸35に伝達する変速機が採用されてもよい。
【0044】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、動力を出力可能なエンジン22が「エンジン」に相当し、エンジン22のクランクシャフト26(出力軸)に少なくともダンパ28(ねじれ要素)を介して接続されると共にクランクシャフト26に動力を入出力可能なモータMG1が「電動機」に相当する。ただし、実施例の主要な要素と課題を解決するための手段の欄に記載された発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載された発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載された発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載された発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0045】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0046】
本発明は、動力出力装置やハイブリッド車両等の製造産業等において利用可能である。
【符号の説明】
【0047】
20、20B ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、33 ピニオンギヤ、34 プラネタリキャリア、35 駆動軸、36 減速ギヤ機構、37 伝達ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42,49 インバータ、43,44 回転位置検出センサ、45 電力ライン、50 バッテリ、55 バッテリ用電子制御ユニット(バッテリECU)、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、72 CPU、74 ROM、76 RAM、81 シフトレバー、82 シフトレンジセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルストロークセンサ、87 車速センサ、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
動力を出力可能なエンジンと、該エンジンの出力軸に少なくともねじれ要素を介して接続されると共に該出力軸に動力を入出力可能な電動機とを備えた動力出力装置の制御装置において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御することを特徴とする動力出力装置の制御装置。
【請求項2】
前記制御用回転数は、前記ねじれ角に基づいて前記ねじれ要素の入力回転数から出力回転数を減じて回転数差を算出し、該算出した回転数差の前記電動機の回転軸換算値を前記取得された前記電動機の回転数に加算することにより設定されることを特徴とする請求項1に記載の動力出力装置の制御装置。
【請求項3】
前記動力出力装置は、前記エンジンの出力軸に前記ねじれ要素を介して接続された第1の回転要素、前記電動機の回転軸に接続された第2の回転要素、および動力を入出力可能な第2電動機に接続された第3の回転要素を有する遊星歯車機構を更に備えることを特徴とする請求項1または2に記載の動力出力装置の制御装置。
【請求項4】
動力を出力可能なエンジンと、前記エンジンの出力軸に少なくともねじれ要素を介して接続された動力を入出力可能な電動機とを備えた動力出力装置の制御方法において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御する、
動力出力装置の制御方法。
【請求項1】
動力を出力可能なエンジンと、該エンジンの出力軸に少なくともねじれ要素を介して接続されると共に該出力軸に動力を入出力可能な電動機とを備えた動力出力装置の制御装置において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御することを特徴とする動力出力装置の制御装置。
【請求項2】
前記制御用回転数は、前記ねじれ角に基づいて前記ねじれ要素の入力回転数から出力回転数を減じて回転数差を算出し、該算出した回転数差の前記電動機の回転軸換算値を前記取得された前記電動機の回転数に加算することにより設定されることを特徴とする請求項1に記載の動力出力装置の制御装置。
【請求項3】
前記動力出力装置は、前記エンジンの出力軸に前記ねじれ要素を介して接続された第1の回転要素、前記電動機の回転軸に接続された第2の回転要素、および動力を入出力可能な第2電動機に接続された第3の回転要素を有する遊星歯車機構を更に備えることを特徴とする請求項1または2に記載の動力出力装置の制御装置。
【請求項4】
動力を出力可能なエンジンと、前記エンジンの出力軸に少なくともねじれ要素を介して接続された動力を入出力可能な電動機とを備えた動力出力装置の制御方法において、
前記エンジンが運転されるときに、前記電動機の回転数を取得すると共に、該取得した回転数を前記ねじれ要素のねじれ角に基づいて補正して制御用回転数を設定し、前記エンジンの目標エンジン回転数に基づいて設定される前記電動機の目標回転数と前記制御用回転数との差がなくなるように該電動機を制御する、
動力出力装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−112048(P2013−112048A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257627(P2011−257627)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]