
動力系の試験装置及びその制御方法
【課題】応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば車両のエンジンやトランスミッション等の動力系を試験する試験装置及びその制御方法に関する。
【背景技術】
【0002】
例えば電気自動車等の車両の動力系を試験する試験装置では、エンジンの代わりにモータが用いられ、車両に発生する走行抵抗の代わりにそのモータの動力を吸収するダイナモメータが用いられる。この場合、ダイナモの回転速度は、車両のタイヤの回転速度に相当する。
【0003】
特許文献1の試験装置では、ダイナモメータである動力吸収部(5)がモータ(4)に機械的に接続され、速度センサ(9)によりその動力吸収部(5)の実速度が検出される。トルクセンサ(8)により得られるトルクから、車両速度演算部(10)により車両の速度が演算により算出される。この演算により求められた車両速度は、実際に計測されたトルクから求められ、実際の車両速度に相当する。運転パターン発生器(12)は車両の目標速度を発生する。そして、車速追従制御部(13)は、車両速度演算部(10)からの実際の車両速度が、その目標速度に一致するように、アクセル操作量またはブレーキ操作量を算出し、これをトルク指令としてモータ制御部(3)に出力する(例えば、特許文献1の段落[0011]〜[0013]、図1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−91410号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の試験装置では、トルクセンサ(9)から実際に検出されるトルクに基づいて演算により車両速度を求めているため、フィードバック制御の応答が遅れ、精度の良い制御を行うことができない、という問題がある。
【0006】
また、例えば速度センサ(9)により得られる動力吸収部(5)の実速度が目標速度に一致するように、モータ制御部(3)にトルク指令を出力することにより、速度制御を行う方法も考えられる。しかしながら、目標速度が加速中(または減速中)のときは、それに応じて、速度センサ(9)により検出される動力吸収部(5)の実速度から加速度を算出して目標速度に追従する必要がある。この場合、フィードバック制御の応答が遅れ、実速度を目標速度に一致させることが難しい。
【0007】
以上のような事情に鑑み、本発明の目的は、応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の一形態に係る車両動力系の試験装置は、動力発生部と、ダイナモメータと、トルク検出器と、制御手段とを具備する。
前記動力発生部は、供試体に機械的に接続可能である。
前記ダイナモメータは、前記動力発生部の駆動力を吸収し、前記供試体に機械的に接続可能である。
前記トルク検出器は、前記ダイナモメータが発生した実トルク値を検出する。
前記制御手段は、加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する。
【0009】
動力の入力側に設けられた動力発生部に供試体を介して接続された、動力の吸収側に設けられたダイナモメータは、車両の車輪を模擬したものである。ダイナモメータが発生する実トルク値は、その車輪のトルク値を模擬したものである。本発明は、トルク検出器により検出されたダイナモメータの実トルク値を用いて、動力発生部の速度を適切に制御することにより、その動力発生部に供試体を介して接続されたダイナモメータの速度を適切に制御しようとするものである。制御手段により、目標速度値の微分演算により得られた加速度値に基づき目標トルク値が算出される。この目標速度値は既知の情報であるので、目標速度値が微分された値である加速度値もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータの加速度値を検出する必要がない。そして、遅延なく得られる加速度値に基づき目標トルク値が算出され、算出された目標トルク値が実トルク値に近づくように動力発生部の駆動が制御されることで、結果的にダイナモメータの速度が制御される。つまり、本発明では、このように遅延なく得られる加速度値を用いて制御が行われることにより、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0010】
本発明において、「加速」は正の加速の意味に限られず、負の加速である減速の意味も含まれる。このことは、これ以降に記載された発明においても同様である。
【0011】
前記車両動力系の試験装置は、検出器と、補正手段とを具備してもよい。
前記検出器は、前記ダイナモメータの実回転速度を検出する。
前記補正手段は、前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記目標速度値が、前記模擬された車両の速度値に近づくように、前記微分された加速度値を補正する。
【0012】
ダイナモメータの実回転速度は、車両の車輪の回転速度を模擬したものであり、検出器によりこの実回転速度が検出される。補正手段により、目標速度値が、実回転速度に基づき算出された速度値に近づくように、微分された加速度値が補正されるので、目標速度値と、実回転速度から得られる車両の速度値との誤差を小さくすることができる。したがって、制御手段による高精度な制御が可能となる。
【0013】
検出器は、ダイナモメータの回転角度を検出する角度検出器と、その回転角度を微分して回転速度を得る微分器とを有するものであってもよい。その場合、角度検出器と微分器とが一体でもよいし、別体でもよい。
【0014】
前記車両動力系の試験装置は、走行抵抗トルク算出手段をさらに具備してもよい。前記走行抵抗トルク算出手段は、前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記模擬された車両の速度値に基づき、走行抵抗トルク値を算出する。この場合、制御手段は、前記微分により得られた前記加速度値に所定の車体慣性を乗じることで加速トルク値を得、得られた加速トルク値に、前記走行抵抗トルク算出手段により得られた前記走行抵抗トルク値を加えることで、前記目標トルク値を得る。
【0015】
本発明では、上記発明と同様に、検出器により、車両の車輪の回転速度に相当する実回転速度が検出される。走行抵抗トルク算出手段が、実回転速度に基づき、模擬された車両の速度値を算出し、制御手段が加速トルク値及び走行抵抗トルク値を算出することで、より正確な目標トルク値を得ることができる。
【0016】
本発明の一形態に係る、車両動力系の試験装置の制御方法は、供試体に機械的に接続可能な動力発生部の駆動力を吸収する、前記供試体に機械的に接続可能なダイナモメータが発生した実トルク値を、トルク検出器により検出する。
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値が得られる。
前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値が算出される。
前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動が制御される。
【0017】
動力の入力側に設けられた動力発生部に供試体を介して接続された、動力の吸収側に設けられたダイナモメータは、車両の車輪を模擬したものである。ダイナモメータが発生する実トルク値は、その車輪のトルク値を模擬したものである。本発明は、検出されたダイナモメータの実トルク値を用いて、動力発生部の速度を適切に制御することにより、その動力発生部に供試体を介して接続されたダイナモメータの速度を適切に制御しようとするものである。目標速度値の微分演算により得られた加速度値に基づき目標トルク値が算出される。この目標速度値は既知の情報であるので、目標速度値が微分された値である加速度値もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータの加速度値を検出する必要がない。そして、遅延なく得られる加速度値に基づき目標トルク値が算出され、算出された目標トルク値が実トルク値に近づくように動力発生部の駆動が制御されることで、結果的にダイナモメータの速度が制御される。つまり、本発明では、このように遅延なく得られる加速度値を用いて制御が行われることにより、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0018】
上記「微分」、「ダイナモメータの目標トルク値を算出」及び「動力発生部の駆動を制御」の各ステップは、その演算処理のためのソフトウェア(を備えるコンピュータ)により実行されてもよいし、または、その演算処理のためのハードウェアを備える機器により実行されてもよい。
【発明の効果】
【0019】
以上のように、本発明によれば、応答遅れを抑制し、高精度に動力発生部の速度を制御することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図2】本発明の第2の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図3】本発明の第3の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図4】参考例に係る、動力系の試験装置の構成を示すブロック図である。
【発明を実施するための形態】
【0021】
以下、図面を参照しながら、本発明の実施形態を説明する。
【0022】
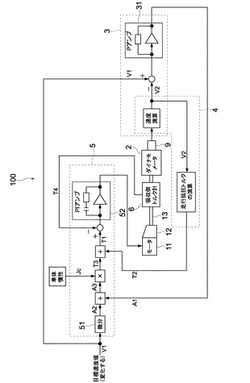
図1は、本発明の第1の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。この車両動力系の試験装置100は、主に電気自動車等の車両に搭載されたエンジン及びトランスミッションを含む動力系を試験する試験装置100である。以下、この車両動力系の試験装置100を、単に試験装置100という。
【0023】
試験装置100は、動力発生部としてのモータ11、ダイナモメータ2、吸収側トルク計6、検出器9、制御部5、加速度補正部3及び走行抵抗トルク算出部4を備える。
【0024】
モータ11は、供試体12であるトランスミッションに機械的に接続されており、車両のエンジンを模擬したものである。すなわちモータ11及び供試体12は動力の入力側に設けられる。
【0025】
ダイナモメータ2は、車両及び供試体12からの動力の伝達軸13に機械的に接続されており、その動力を吸収する。つまり、ダイナモメータ2は車両の車輪を模擬したものであり、走行時の抵抗を擬似的に再現した抵抗トルクを伝達軸13に与える。ダイナモメータ2は、このように伝達軸13を介して供試体12に接続される形態のほか、供試体12である機械装置、例えば実車両の駆動輪が乗るローラ等を介して接続されていてもよい。
【0026】
吸収側トルク計6は、ダイナモメータ2が発生した実トルクを検出する。吸収側トルク計6は、伝達軸13のねじれ量を検出するものであり、例えば磁気式、静電容量式、ひずみゲージ方式等が用いられる。
【0027】
本実施形態に係る試験装置100は、吸収側トルク計6により検出されたダイナモメータ2の実トルク値を用いて、モータ11の速度を適切に制御することにより、そのモータ11に供試体12を介して接続されたダイナモメータ2の速度を適切に制御しようとするものである。
【0028】
検出器9は、典型的には、ダイナモメータ2の回転角度を検出するレゾルバである。この試験装置100では、検出された回転角度値は微分され、回転速度(実回転速度)が得られるようになっている。検出器9は、角度検出器であるレゾルバと、レゾルバの出力値を微分して速度(角速度)値を得るための微分器とが一体となったものでもよいし、別体のものでもよい。検出器9は、レゾルバに限られず、ポテンショメータ、ロータリエンコーダ、加速度センサ、角速度センサ等が用いられてもよい。
【0029】
制御部5は、例えば予め設定された目標速度値V1を微分することにより加速度値を得る。目標速度値V1は、ドライバが車両を運転するときの状況を再現するために変化し得るように設定され、つまり加減速を持つように設定される。制御部5は、その加速度値A2に基づき得られた目標トルク値T1が、吸収側トルク計6により検出された実トルク値T4に近づくように、PIアンプ52による比例積分制御によりモータ11の駆動を制御する。「近づくように」と言う意味は、「一致するように」という意味も含む。
【0030】
典型的には、モータ11には図示しないインバータが電気的に接続されており、制御部5は、このインバータにトルク指令値を送ることによりモータ11に発生させるトルクを制御する。
【0031】
このように、制御部5は、モータ11の駆動を制御することで、つまりモータ11の回転速度を制御することにより、ダイナモメータ2の回転速度を制御することができる。
【0032】
また、ダイナモメータ2にも図示しないインバータが電気的に接続されている。このインバータは、上記車体慣性量Jcによる慣性トルクや、上記走行抵抗トルク値T2を含む、吸収側の動力を発生させるためのトルク指令を受け、このトルク指令に応じてダイナモメータ2を駆動する。この吸収側の動力には、上記慣性トルクや走行抵抗トルク値T2のほか、坂道等に起因して車両に発生する重力成分による抵抗トルクも含まれていてもよい。
【0033】
加速度補正部3は、検出器9により検出された回転速度から、車両の速度を擬似的に再現するためにその速度演算を行う。そして、加速度補正部3は、それにより得られた演算速度値V2と目標速度値V1との速度差(加速度)を得、その速度差である補正加速度値A1を用いて加速度値A2を補正する。具体的には、Pアンプによる比例制御により、その補正加速度値A1が加速度値A2に加算され、加速度値A3が得られる。つまり、A3=A2+A1である。
【0034】
この加算により得られた加速度値A3に、車両全体の総重量の慣性量である車体慣性量Jcが乗じられることにより、加速トルク値T3が得られる。つまり、T3=Jc・A3である。
【0035】
車体慣性量Jcの情報は、予め図示しない後述する記憶デバイス(ディスク状の記録媒体または固体メモリ等)に保持されていればよい。
【0036】
走行抵抗トルク算出部4は、主に上記の演算速度値V2に比例した空気抵抗による負荷を擬似的に再現した、走行抵抗トルク値T2を生成する。あるいは、走行抵抗トルク算出部4は、車両のタイヤと路面の摩擦抵抗等を含む転がり抵抗を擬似的に再現したトルク値の情報を予め有し、そのトルク値の情報を、上記空気抵抗によるトルク値に加えて、これを走行抵抗トルク値T2として生成してもよい。制御部5では、生成された走行抵抗トルク値T2は、上記加速トルク値T3に加えられることにより、上記目標トルク値T1が得られる。つまり、T1=T2+T3である。
【0037】
以上説明した、制御部5、加速度補正部3及び走行抵抗トルク算出部4は、ハードウェアで実現されてもよいし、ソフトウェア及びハードウェアの両方で実現されてもよい。ソフトウェア及びハードウェアの両方で実現される場合、そのハードウェアは、ソフトウェアのプログラムを格納する記憶デバイスを少なくとも含む。
【0038】
ハードウェアは、典型的には、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、DSP(Digital Signal Processor)、FPGA(Field Programmable Gate Array)、ASIC(Application Specific Integrated Circuit)、光ディスク、磁気ディスク、及びフラッシュメモリ等のうち少なくとも1つが選択的に用いられて構成される。
【0039】
以上のように構成された試験装置100の動作を説明する。
【0040】
目標速度値V1が制御部5に入力され、制御部5では、入力された目標速度値V1に基づき、目標トルク値T1が算出される。また、運転時の抵抗が再現されるように所定のトルク指令によりダイナモメータ2の駆動が制御される。また、目標速度値V1を微分することにより、加速度値A2が得られる。
【0041】
走行抵抗トルク算出部4では、検出器9により検出された、ダイナモメータ2の実回転速度に基づく速度演算が実行され、演算速度値V2が得られる。
【0042】
加速度補正部3では、目標速度値V1と演算速度値V2とが近づくように、その差分(加速度)である補正加速度値A1が、上記微分された加速度値A2に加算され、加速度値A3が得られる。このように、加速度値A2が補正されるので、目標速度値V1と、実回転速度から得られる車両の速度値(演算速度値)V2との誤差を小さくすることができる。したがって、高精度な制御が可能となる。
【0043】
制御部5では、補正により得られた加速度値A3に、車両全体の総重量の慣性量である車体慣性量Jcが乗じられることにより、加速トルク値T3が得られる。また、加速トルク値T3に、演算速度値V2に基づく演算により得られる走行抵抗トルク値T2が加算される。これにより目標トルク値T1が得られる。
【0044】
制御部5では、この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。
【0045】
以上のように、本実施形態では、目標速度値V1の微分演算により得られた加速度値A2に基づき目標トルク値T1が算出される。この目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータ2の加速度値を検出する必要がない。そして、遅延なく得られる加速度値A2に基づき目標トルク値T1が算出され、算出された目標トルク値T1が実トルク値T4に近づくようにモータ11の駆動が制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0046】
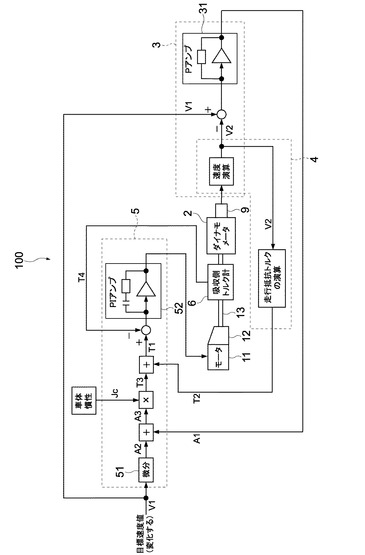
図2は、本発明の第2の実施形態に係る車両動力系の試験装置の構成を示すブロック図である。
【0047】
本実施形態に係る試験装置200では、動力発生部として、図1に示したようにエンジンを模擬したモータ11に代えて、実際の自動車のエンジン21が設けられている。このエンジン21には、エンジン21のスロットルの開度を調整するスロットルアクチュエータ22が接続されている。エンジン21及びスロットルクアクチュエータ22のほかの要素は、図1に示した試験装置100が備える要素と同様のものである。スロットルアクチュエータ22には、PIアンプ52からの出力信号が入力され、スロットルアクチュエータ22の駆動が制御される。
【0048】
このような構成による試験装置200によっても、算出された目標トルク値T1が実トルク値T4に近づくように、エンジン21のスロットルの開度がスロットルアクチュエータ22により制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0049】
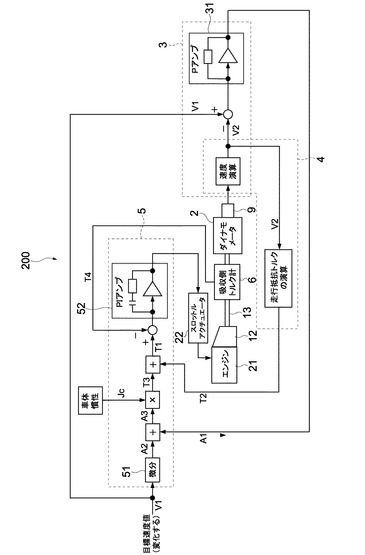
図3は、本発明の第3の実施形態に係る車両動力系の試験装置の構成を示すブロック図である。
【0050】
本実施形態に係る試験装置300では、図2に示したスロットルアクチュエータ22に代えて、ECU(Electronic Control Unit)23が設けられている。ECUは、エンジン21のスロットルの開度の電子制御を行う。エンジン21及びECU23のほかの要素は、図1に示した試験装置100が備える要素と同様のものである。ECU23には、PIアンプ52からの出力信号が入力される。
【0051】
このような構成による試験装置300によっても、算出された目標トルク値T1が実トルク値T4に近づくように、エンジン21のスロットルの開度がECU23により制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0052】
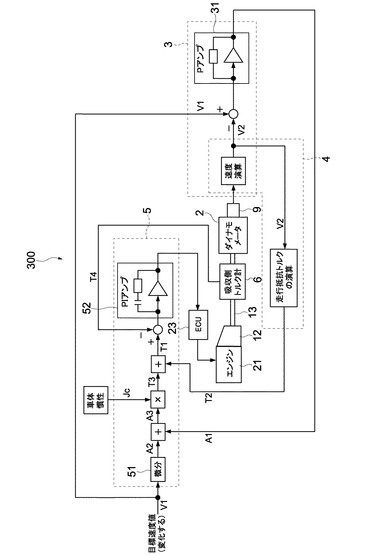
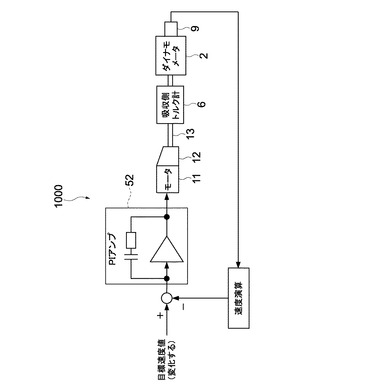
図2は、参考例に係る、動力系の試験装置の構成を示すブロック図である。この試験装置1000では、供試体12であるトランスミッションに、エンジンを模擬したモータ11が接続され、また、動力の伝達軸13を介して吸収側トルク計6及びダイナモメータ2が接続されている。ダイナモメータ2には回転角度の検出器9が取り付けられている。検出された、ダイナモメータ2の回転角度から実回転速度、つまり擬似的な車両の速度が算出され、その速度値と目標速度値とが近づくようにPIアンプ52による比例積分制御が行われる。
【0053】
このような試験装置1000において、目標速度値が加減速してモータ11がそれに応じて加減速している途中では、ダイナモメータ2の実回転速度の演算結果が遅れる。つまりフィードバック制御の応答遅れが発生するため、高精度な制御を行うことができない。
【0054】
これに対して、本発明の実施形態に係る試験装置100、200及び300では、上述のように、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0055】
本発明に係る実施形態は、以上説明した実施形態に限定されず、本発明の趣旨を逸脱しない範囲で、他の種々の実施形態に置き換えることができる。
【符号の説明】
【0056】
V1…目標速度値
A2…微分により得られた加速度値
T1…目標トルク値
T4…実トルク値
Jc…車体慣性量
T2…走行抵抗トルク値
V2…演算速度値
A1…補正加速度値
A3…加速度値
T3…加速トルク値
2…ダイナモメータ
3…加速度補正部(補正手段に相当)
4…走行抵抗トルク算出部(走行抵抗トルク算出手段に相当)
5…制御部(制御手段に相当)
6…吸収側トルク計(トルク検出器に相当)
9…検出器
11…モータ(動力発生部に相当)
12…供試体
21…エンジン(動力発生部に相当)
100、200、300…試験装置
【技術分野】
【0001】
本発明は、例えば車両のエンジンやトランスミッション等の動力系を試験する試験装置及びその制御方法に関する。
【背景技術】
【0002】
例えば電気自動車等の車両の動力系を試験する試験装置では、エンジンの代わりにモータが用いられ、車両に発生する走行抵抗の代わりにそのモータの動力を吸収するダイナモメータが用いられる。この場合、ダイナモの回転速度は、車両のタイヤの回転速度に相当する。
【0003】
特許文献1の試験装置では、ダイナモメータである動力吸収部(5)がモータ(4)に機械的に接続され、速度センサ(9)によりその動力吸収部(5)の実速度が検出される。トルクセンサ(8)により得られるトルクから、車両速度演算部(10)により車両の速度が演算により算出される。この演算により求められた車両速度は、実際に計測されたトルクから求められ、実際の車両速度に相当する。運転パターン発生器(12)は車両の目標速度を発生する。そして、車速追従制御部(13)は、車両速度演算部(10)からの実際の車両速度が、その目標速度に一致するように、アクセル操作量またはブレーキ操作量を算出し、これをトルク指令としてモータ制御部(3)に出力する(例えば、特許文献1の段落[0011]〜[0013]、図1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−91410号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の試験装置では、トルクセンサ(9)から実際に検出されるトルクに基づいて演算により車両速度を求めているため、フィードバック制御の応答が遅れ、精度の良い制御を行うことができない、という問題がある。
【0006】
また、例えば速度センサ(9)により得られる動力吸収部(5)の実速度が目標速度に一致するように、モータ制御部(3)にトルク指令を出力することにより、速度制御を行う方法も考えられる。しかしながら、目標速度が加速中(または減速中)のときは、それに応じて、速度センサ(9)により検出される動力吸収部(5)の実速度から加速度を算出して目標速度に追従する必要がある。この場合、フィードバック制御の応答が遅れ、実速度を目標速度に一致させることが難しい。
【0007】
以上のような事情に鑑み、本発明の目的は、応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明の一形態に係る車両動力系の試験装置は、動力発生部と、ダイナモメータと、トルク検出器と、制御手段とを具備する。
前記動力発生部は、供試体に機械的に接続可能である。
前記ダイナモメータは、前記動力発生部の駆動力を吸収し、前記供試体に機械的に接続可能である。
前記トルク検出器は、前記ダイナモメータが発生した実トルク値を検出する。
前記制御手段は、加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する。
【0009】
動力の入力側に設けられた動力発生部に供試体を介して接続された、動力の吸収側に設けられたダイナモメータは、車両の車輪を模擬したものである。ダイナモメータが発生する実トルク値は、その車輪のトルク値を模擬したものである。本発明は、トルク検出器により検出されたダイナモメータの実トルク値を用いて、動力発生部の速度を適切に制御することにより、その動力発生部に供試体を介して接続されたダイナモメータの速度を適切に制御しようとするものである。制御手段により、目標速度値の微分演算により得られた加速度値に基づき目標トルク値が算出される。この目標速度値は既知の情報であるので、目標速度値が微分された値である加速度値もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータの加速度値を検出する必要がない。そして、遅延なく得られる加速度値に基づき目標トルク値が算出され、算出された目標トルク値が実トルク値に近づくように動力発生部の駆動が制御されることで、結果的にダイナモメータの速度が制御される。つまり、本発明では、このように遅延なく得られる加速度値を用いて制御が行われることにより、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0010】
本発明において、「加速」は正の加速の意味に限られず、負の加速である減速の意味も含まれる。このことは、これ以降に記載された発明においても同様である。
【0011】
前記車両動力系の試験装置は、検出器と、補正手段とを具備してもよい。
前記検出器は、前記ダイナモメータの実回転速度を検出する。
前記補正手段は、前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記目標速度値が、前記模擬された車両の速度値に近づくように、前記微分された加速度値を補正する。
【0012】
ダイナモメータの実回転速度は、車両の車輪の回転速度を模擬したものであり、検出器によりこの実回転速度が検出される。補正手段により、目標速度値が、実回転速度に基づき算出された速度値に近づくように、微分された加速度値が補正されるので、目標速度値と、実回転速度から得られる車両の速度値との誤差を小さくすることができる。したがって、制御手段による高精度な制御が可能となる。
【0013】
検出器は、ダイナモメータの回転角度を検出する角度検出器と、その回転角度を微分して回転速度を得る微分器とを有するものであってもよい。その場合、角度検出器と微分器とが一体でもよいし、別体でもよい。
【0014】
前記車両動力系の試験装置は、走行抵抗トルク算出手段をさらに具備してもよい。前記走行抵抗トルク算出手段は、前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記模擬された車両の速度値に基づき、走行抵抗トルク値を算出する。この場合、制御手段は、前記微分により得られた前記加速度値に所定の車体慣性を乗じることで加速トルク値を得、得られた加速トルク値に、前記走行抵抗トルク算出手段により得られた前記走行抵抗トルク値を加えることで、前記目標トルク値を得る。
【0015】
本発明では、上記発明と同様に、検出器により、車両の車輪の回転速度に相当する実回転速度が検出される。走行抵抗トルク算出手段が、実回転速度に基づき、模擬された車両の速度値を算出し、制御手段が加速トルク値及び走行抵抗トルク値を算出することで、より正確な目標トルク値を得ることができる。
【0016】
本発明の一形態に係る、車両動力系の試験装置の制御方法は、供試体に機械的に接続可能な動力発生部の駆動力を吸収する、前記供試体に機械的に接続可能なダイナモメータが発生した実トルク値を、トルク検出器により検出する。
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値が得られる。
前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値が算出される。
前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動が制御される。
【0017】
動力の入力側に設けられた動力発生部に供試体を介して接続された、動力の吸収側に設けられたダイナモメータは、車両の車輪を模擬したものである。ダイナモメータが発生する実トルク値は、その車輪のトルク値を模擬したものである。本発明は、検出されたダイナモメータの実トルク値を用いて、動力発生部の速度を適切に制御することにより、その動力発生部に供試体を介して接続されたダイナモメータの速度を適切に制御しようとするものである。目標速度値の微分演算により得られた加速度値に基づき目標トルク値が算出される。この目標速度値は既知の情報であるので、目標速度値が微分された値である加速度値もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータの加速度値を検出する必要がない。そして、遅延なく得られる加速度値に基づき目標トルク値が算出され、算出された目標トルク値が実トルク値に近づくように動力発生部の駆動が制御されることで、結果的にダイナモメータの速度が制御される。つまり、本発明では、このように遅延なく得られる加速度値を用いて制御が行われることにより、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0018】
上記「微分」、「ダイナモメータの目標トルク値を算出」及び「動力発生部の駆動を制御」の各ステップは、その演算処理のためのソフトウェア(を備えるコンピュータ)により実行されてもよいし、または、その演算処理のためのハードウェアを備える機器により実行されてもよい。
【発明の効果】
【0019】
以上のように、本発明によれば、応答遅れを抑制し、高精度に動力発生部の速度を制御することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図2】本発明の第2の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図3】本発明の第3の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。
【図4】参考例に係る、動力系の試験装置の構成を示すブロック図である。
【発明を実施するための形態】
【0021】
以下、図面を参照しながら、本発明の実施形態を説明する。
【0022】
図1は、本発明の第1の実施形態に係る、車両動力系の試験装置の構成を示すブロック図である。この車両動力系の試験装置100は、主に電気自動車等の車両に搭載されたエンジン及びトランスミッションを含む動力系を試験する試験装置100である。以下、この車両動力系の試験装置100を、単に試験装置100という。
【0023】
試験装置100は、動力発生部としてのモータ11、ダイナモメータ2、吸収側トルク計6、検出器9、制御部5、加速度補正部3及び走行抵抗トルク算出部4を備える。
【0024】
モータ11は、供試体12であるトランスミッションに機械的に接続されており、車両のエンジンを模擬したものである。すなわちモータ11及び供試体12は動力の入力側に設けられる。
【0025】
ダイナモメータ2は、車両及び供試体12からの動力の伝達軸13に機械的に接続されており、その動力を吸収する。つまり、ダイナモメータ2は車両の車輪を模擬したものであり、走行時の抵抗を擬似的に再現した抵抗トルクを伝達軸13に与える。ダイナモメータ2は、このように伝達軸13を介して供試体12に接続される形態のほか、供試体12である機械装置、例えば実車両の駆動輪が乗るローラ等を介して接続されていてもよい。
【0026】
吸収側トルク計6は、ダイナモメータ2が発生した実トルクを検出する。吸収側トルク計6は、伝達軸13のねじれ量を検出するものであり、例えば磁気式、静電容量式、ひずみゲージ方式等が用いられる。
【0027】
本実施形態に係る試験装置100は、吸収側トルク計6により検出されたダイナモメータ2の実トルク値を用いて、モータ11の速度を適切に制御することにより、そのモータ11に供試体12を介して接続されたダイナモメータ2の速度を適切に制御しようとするものである。
【0028】
検出器9は、典型的には、ダイナモメータ2の回転角度を検出するレゾルバである。この試験装置100では、検出された回転角度値は微分され、回転速度(実回転速度)が得られるようになっている。検出器9は、角度検出器であるレゾルバと、レゾルバの出力値を微分して速度(角速度)値を得るための微分器とが一体となったものでもよいし、別体のものでもよい。検出器9は、レゾルバに限られず、ポテンショメータ、ロータリエンコーダ、加速度センサ、角速度センサ等が用いられてもよい。
【0029】
制御部5は、例えば予め設定された目標速度値V1を微分することにより加速度値を得る。目標速度値V1は、ドライバが車両を運転するときの状況を再現するために変化し得るように設定され、つまり加減速を持つように設定される。制御部5は、その加速度値A2に基づき得られた目標トルク値T1が、吸収側トルク計6により検出された実トルク値T4に近づくように、PIアンプ52による比例積分制御によりモータ11の駆動を制御する。「近づくように」と言う意味は、「一致するように」という意味も含む。
【0030】
典型的には、モータ11には図示しないインバータが電気的に接続されており、制御部5は、このインバータにトルク指令値を送ることによりモータ11に発生させるトルクを制御する。
【0031】
このように、制御部5は、モータ11の駆動を制御することで、つまりモータ11の回転速度を制御することにより、ダイナモメータ2の回転速度を制御することができる。
【0032】
また、ダイナモメータ2にも図示しないインバータが電気的に接続されている。このインバータは、上記車体慣性量Jcによる慣性トルクや、上記走行抵抗トルク値T2を含む、吸収側の動力を発生させるためのトルク指令を受け、このトルク指令に応じてダイナモメータ2を駆動する。この吸収側の動力には、上記慣性トルクや走行抵抗トルク値T2のほか、坂道等に起因して車両に発生する重力成分による抵抗トルクも含まれていてもよい。
【0033】
加速度補正部3は、検出器9により検出された回転速度から、車両の速度を擬似的に再現するためにその速度演算を行う。そして、加速度補正部3は、それにより得られた演算速度値V2と目標速度値V1との速度差(加速度)を得、その速度差である補正加速度値A1を用いて加速度値A2を補正する。具体的には、Pアンプによる比例制御により、その補正加速度値A1が加速度値A2に加算され、加速度値A3が得られる。つまり、A3=A2+A1である。
【0034】
この加算により得られた加速度値A3に、車両全体の総重量の慣性量である車体慣性量Jcが乗じられることにより、加速トルク値T3が得られる。つまり、T3=Jc・A3である。
【0035】
車体慣性量Jcの情報は、予め図示しない後述する記憶デバイス(ディスク状の記録媒体または固体メモリ等)に保持されていればよい。
【0036】
走行抵抗トルク算出部4は、主に上記の演算速度値V2に比例した空気抵抗による負荷を擬似的に再現した、走行抵抗トルク値T2を生成する。あるいは、走行抵抗トルク算出部4は、車両のタイヤと路面の摩擦抵抗等を含む転がり抵抗を擬似的に再現したトルク値の情報を予め有し、そのトルク値の情報を、上記空気抵抗によるトルク値に加えて、これを走行抵抗トルク値T2として生成してもよい。制御部5では、生成された走行抵抗トルク値T2は、上記加速トルク値T3に加えられることにより、上記目標トルク値T1が得られる。つまり、T1=T2+T3である。
【0037】
以上説明した、制御部5、加速度補正部3及び走行抵抗トルク算出部4は、ハードウェアで実現されてもよいし、ソフトウェア及びハードウェアの両方で実現されてもよい。ソフトウェア及びハードウェアの両方で実現される場合、そのハードウェアは、ソフトウェアのプログラムを格納する記憶デバイスを少なくとも含む。
【0038】
ハードウェアは、典型的には、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、RAM(Random Access Memory)、ROM(Read Only Memory)、DSP(Digital Signal Processor)、FPGA(Field Programmable Gate Array)、ASIC(Application Specific Integrated Circuit)、光ディスク、磁気ディスク、及びフラッシュメモリ等のうち少なくとも1つが選択的に用いられて構成される。
【0039】
以上のように構成された試験装置100の動作を説明する。
【0040】
目標速度値V1が制御部5に入力され、制御部5では、入力された目標速度値V1に基づき、目標トルク値T1が算出される。また、運転時の抵抗が再現されるように所定のトルク指令によりダイナモメータ2の駆動が制御される。また、目標速度値V1を微分することにより、加速度値A2が得られる。
【0041】
走行抵抗トルク算出部4では、検出器9により検出された、ダイナモメータ2の実回転速度に基づく速度演算が実行され、演算速度値V2が得られる。
【0042】
加速度補正部3では、目標速度値V1と演算速度値V2とが近づくように、その差分(加速度)である補正加速度値A1が、上記微分された加速度値A2に加算され、加速度値A3が得られる。このように、加速度値A2が補正されるので、目標速度値V1と、実回転速度から得られる車両の速度値(演算速度値)V2との誤差を小さくすることができる。したがって、高精度な制御が可能となる。
【0043】
制御部5では、補正により得られた加速度値A3に、車両全体の総重量の慣性量である車体慣性量Jcが乗じられることにより、加速トルク値T3が得られる。また、加速トルク値T3に、演算速度値V2に基づく演算により得られる走行抵抗トルク値T2が加算される。これにより目標トルク値T1が得られる。
【0044】
制御部5では、この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。
【0045】
以上のように、本実施形態では、目標速度値V1の微分演算により得られた加速度値A2に基づき目標トルク値T1が算出される。この目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。すなわち、実際にダイナモメータ2の加速度値を検出する必要がない。そして、遅延なく得られる加速度値A2に基づき目標トルク値T1が算出され、算出された目標トルク値T1が実トルク値T4に近づくようにモータ11の駆動が制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0046】
図2は、本発明の第2の実施形態に係る車両動力系の試験装置の構成を示すブロック図である。
【0047】
本実施形態に係る試験装置200では、動力発生部として、図1に示したようにエンジンを模擬したモータ11に代えて、実際の自動車のエンジン21が設けられている。このエンジン21には、エンジン21のスロットルの開度を調整するスロットルアクチュエータ22が接続されている。エンジン21及びスロットルクアクチュエータ22のほかの要素は、図1に示した試験装置100が備える要素と同様のものである。スロットルアクチュエータ22には、PIアンプ52からの出力信号が入力され、スロットルアクチュエータ22の駆動が制御される。
【0048】
このような構成による試験装置200によっても、算出された目標トルク値T1が実トルク値T4に近づくように、エンジン21のスロットルの開度がスロットルアクチュエータ22により制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0049】
図3は、本発明の第3の実施形態に係る車両動力系の試験装置の構成を示すブロック図である。
【0050】
本実施形態に係る試験装置300では、図2に示したスロットルアクチュエータ22に代えて、ECU(Electronic Control Unit)23が設けられている。ECUは、エンジン21のスロットルの開度の電子制御を行う。エンジン21及びECU23のほかの要素は、図1に示した試験装置100が備える要素と同様のものである。ECU23には、PIアンプ52からの出力信号が入力される。
【0051】
このような構成による試験装置300によっても、算出された目標トルク値T1が実トルク値T4に近づくように、エンジン21のスロットルの開度がECU23により制御されることで、結果的にダイナモメータ2の速度が制御される。つまり、本実施形態では、このように遅延なく得られる加速度値A2を用いて制御が行われることにより、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
【0052】
図2は、参考例に係る、動力系の試験装置の構成を示すブロック図である。この試験装置1000では、供試体12であるトランスミッションに、エンジンを模擬したモータ11が接続され、また、動力の伝達軸13を介して吸収側トルク計6及びダイナモメータ2が接続されている。ダイナモメータ2には回転角度の検出器9が取り付けられている。検出された、ダイナモメータ2の回転角度から実回転速度、つまり擬似的な車両の速度が算出され、その速度値と目標速度値とが近づくようにPIアンプ52による比例積分制御が行われる。
【0053】
このような試験装置1000において、目標速度値が加減速してモータ11がそれに応じて加減速している途中では、ダイナモメータ2の実回転速度の演算結果が遅れる。つまりフィードバック制御の応答遅れが発生するため、高精度な制御を行うことができない。
【0054】
これに対して、本発明の実施形態に係る試験装置100、200及び300では、上述のように、制御の応答遅れを抑制することができ、高精度にダイナモメータの速度を制御することができる。
【0055】
本発明に係る実施形態は、以上説明した実施形態に限定されず、本発明の趣旨を逸脱しない範囲で、他の種々の実施形態に置き換えることができる。
【符号の説明】
【0056】
V1…目標速度値
A2…微分により得られた加速度値
T1…目標トルク値
T4…実トルク値
Jc…車体慣性量
T2…走行抵抗トルク値
V2…演算速度値
A1…補正加速度値
A3…加速度値
T3…加速トルク値
2…ダイナモメータ
3…加速度補正部(補正手段に相当)
4…走行抵抗トルク算出部(走行抵抗トルク算出手段に相当)
5…制御部(制御手段に相当)
6…吸収側トルク計(トルク検出器に相当)
9…検出器
11…モータ(動力発生部に相当)
12…供試体
21…エンジン(動力発生部に相当)
100、200、300…試験装置
【特許請求の範囲】
【請求項1】
供試体に機械的に接続可能な動力発生部と、
前記動力発生部の駆動力を吸収し、前記供試体に機械的に接続可能なダイナモメータと、
前記ダイナモメータが発生した実トルク値を検出するトルク検出器と、
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する制御手段と
を具備する車両動力系の試験装置。
【請求項2】
請求項1に記載の車両動力系の試験装置であって、
前記ダイナモメータの実回転速度を検出する検出器と、
前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記目標速度値が、前記模擬された車両の速度値に近づくように、前記微分された加速度値を補正する補正手段と
をさらに具備する車両動力系の試験装置。
【請求項3】
請求項1に記載の車両動力系の試験装置であって、
前記ダイナモメータの実回転速度を検出する検出器と、
前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記模擬された車両の速度値に基づき、走行抵抗トルク値を算出する走行抵抗トルク算出手段とをさらに具備し、
前記制御手段は、前記微分により得られた前記加速度値に所定の車体慣性を乗じることで加速トルク値を得、得られた加速トルク値に、前記走行抵抗トルク算出手段により得られた前記走行抵抗トルク値を加えることで、前記目標トルク値を得る
車両動力系の試験装置。
【請求項4】
供試体に機械的に接続可能な動力発生部の駆動力を吸収する、前記供試体に機械的に接続可能なダイナモメータが発生した実トルク値を、トルク検出器により検出し、
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、
前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、
前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する
車両動力系の試験装置の制御方法。
【請求項1】
供試体に機械的に接続可能な動力発生部と、
前記動力発生部の駆動力を吸収し、前記供試体に機械的に接続可能なダイナモメータと、
前記ダイナモメータが発生した実トルク値を検出するトルク検出器と、
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する制御手段と
を具備する車両動力系の試験装置。
【請求項2】
請求項1に記載の車両動力系の試験装置であって、
前記ダイナモメータの実回転速度を検出する検出器と、
前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記目標速度値が、前記模擬された車両の速度値に近づくように、前記微分された加速度値を補正する補正手段と
をさらに具備する車両動力系の試験装置。
【請求項3】
請求項1に記載の車両動力系の試験装置であって、
前記ダイナモメータの実回転速度を検出する検出器と、
前記検出器により検出された前記実回転速度から、模擬された車両の速度値を算出し、前記模擬された車両の速度値に基づき、走行抵抗トルク値を算出する走行抵抗トルク算出手段とをさらに具備し、
前記制御手段は、前記微分により得られた前記加速度値に所定の車体慣性を乗じることで加速トルク値を得、得られた加速トルク値に、前記走行抵抗トルク算出手段により得られた前記走行抵抗トルク値を加えることで、前記目標トルク値を得る
車両動力系の試験装置。
【請求項4】
供試体に機械的に接続可能な動力発生部の駆動力を吸収する、前記供試体に機械的に接続可能なダイナモメータが発生した実トルク値を、トルク検出器により検出し、
加速により変化し得る、前記ダイナモメータの目標速度値を微分して加速度値を得、
前記微分により得られた加速度値に基づき、前記ダイナモメータの目標トルク値を算出し、
前記目標トルク値が、前記トルク検出器により検出された前記実トルク値に近づくように、前記動力発生部の駆動を制御する
車両動力系の試験装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−158352(P2011−158352A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−20099(P2010−20099)
【出願日】平成22年2月1日(2010.2.1)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年2月1日(2010.2.1)
【出願人】(000002059)シンフォニアテクノロジー株式会社 (1,111)
【Fターム(参考)】
[ Back to top ]