
動力装置の制御装置
【課題】機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制する。
【解決手段】燃焼室に供給される燃料の量を制御することによって機関トルクが制御されるとともに出力軸に印加される負荷を制御することによって機関回転数が制御される。最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とが制御されているときには実際の機関回転数が機関回転数表示手段に表示される。境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とが制御されているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数が機関回転数表示手段に表示される。
【解決手段】燃焼室に供給される燃料の量を制御することによって機関トルクが制御されるとともに出力軸に印加される負荷を制御することによって機関回転数が制御される。最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とが制御されているときには実際の機関回転数が機関回転数表示手段に表示される。境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とが制御されているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数が機関回転数表示手段に表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は動力装置の制御装置に関する。
【背景技術】
【0002】
特許文献1にいわゆるハイブリッド車両の動力装置の制御装置が記載されている。特許文献1に記載の動力装置は内燃機関と発電電動機(すなわち、モータジェネレータ)とを具備する。
【0003】
ところで、内燃機関の出力軸から出力されるトルクを「機関トルク」と称し、内燃機関の出力軸の回転数を「機関回転数」と称し、これら機関トルクと機関回転数とによって規定される内燃機関の動作点を「機関動作点」と称し、内燃機関の出力軸から出力される出力として要求される出力を「要求出力」と称したとき、特許文献1に記載されているように、内燃機関には、要求出力に対応する出力を内燃機関の出力軸から出力させたときに燃費が最も高くなる機関動作点(以下この機関動作点を「最適機関動作点」という)が存在する。
【0004】
一方、内燃機関には、その運転に起因して発生する振動や音のレベルが許容されるレベル以下に収まる機関動作点(以下この機関動作点を「許容機関動作点」という)が存在する。そして、これら許容機関動作点によって規定される内燃機関の動作領域を「許容機関動作領域」と称したとき、特許文献1に記載されているように、許容機関動作領域内にない最適機関動作点が存在する。したがって、許容機関動作領域内にない最適機関動作点を規定する機関トルクおよび機関回転数をそれぞれ目標機関トルクおよび目標機関回転数としてこれら目標機関トルクおよび目標機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御した場合、許容されるレベルよりも大きい振動や音が内燃機関から発生することになる。
【0005】
このように許容されるレベルよりも大きい振動や音が内燃機関から発生することを避けるために、特許文献1に記載の制御装置は、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点であるときには同最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御し、一方、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点ではないときには要求出力に対応して選択される許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御するようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−163090号公報
【特許文献2】特開2000−289489号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、許容機関動作点とそれを規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられたときに内燃機関の出力軸から出力される出力(以下この出力を「機関出力」という)との間の関係の性質上、一般的に、許容機関動作点に従って内燃機関が動作せしめられている状況下において要求出力が変わり、許容機関動作点が変更され、それに従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量は、最適機関動作点に従って内燃機関が動作せしめられている場合のそれに比べて大きい。
【0008】
つまり、たとえば、ハイブリッド車両の運転者がハイブリッド車両を加速しようとしてアクセルペダルを踏み込んだとき、アクセルペダルの踏込量の変化量が同じであっても、許容機関動作点に従って内燃機関が動作せしめられていると、最適機関動作点に従って内燃機関が動作せしめられている場合に比べて、機関回転数が大きく上昇することになる。そして、制御装置が機関回転数を表示する機関回転数表示手段(たとえば、タコメータ)を具備しており、許容機関動作点に従って内燃機関が動作せしめられているときの実際の機関回転数が上記機関回転数表示手段に表示されると、その表示を見た運転者にアクセルペダルの踏込量の変化量と機関回転数の上昇量との間の関係に関して違和感が生じる可能性がある。すなわち、アクセルペダルの踏込量に対して予想以上に機関回転数が上昇したといった違和感が運転者に生じる可能性がある。このことは、運転者がハイブリッド車両を減速しようとしてアクセルペダルの踏込量を小さくしたときにも当てはまる。
【0009】
そして、このことは、一般的に、上述した構成とは異なる構成を有する動力装置であっても、その動力装置が内燃機関を具備し、その動力装置の制御装置が要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点であるときには同最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御し、一方、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点ではないときには要求出力に対応して選択される許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御するようにしている場合にも当てはまる。すなわち、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じる。
【0010】
本願の発明の目的は、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することにある。
【課題を解決するための手段】
【0011】
本願の発明は、燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置に関する。
【0012】
そして、本発明の制御装置は、前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御する。
【0013】
ここで、機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、本発明の制御装置は、要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0014】
一方、本発明の制御装置は、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0015】
ここで、本発明の制御装置は、機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させる。
【0016】
一方、本発明の制御装置は、上記目的を達成するために、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0017】
本発明によれば、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、上述した構成を有する動力装置に関して上述したように内燃機関の動作が制御される場合において、要求出力が変わったために要求出力に基づいて選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「境界許容機関動作点の利用時の機関回転数変化量」と称し、同様に要求出力が変わったために要求出力に基づいて選択される最適機関動作点が変更され、斯くして変更される最適機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「最適機関動作点の利用時の機関回転数変化量」と称したとき、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力(すなわち、内燃機関の出力軸から出力される出力)との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化量は、最適機関動作点の利用時の機関回転数変化量よりも大きい。したがって、このときに実際の機関回転数をそのまま機関回転数表示手段に表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0018】
しかしながら、本発明では、境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数をなまし処理によって補正することによって得られる機関回転数(すなわち、補正機関回転数)が機関回転数表示手段によって表示される。実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を機関回転数表示手段に表示させた場合、単位要求出力変化量に対する表示機関回転数(すなわち、機関回転数表示手段によって表示される機関回転数)の変化量が小さくなる。このため、本発明によれば、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができるのである。
【0019】
あるいは、本願の別の発明の制御装置は、上記目的を達成するために、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0020】
本発明によっても、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、本発明では、境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときに機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる機関回転数(すなわち、補正機関回転数)が機関回転数表示手段によって表示される。したがって、単位要求出力変化量に対する表示機関回転数(すなわち、機関回転数表示手段によって表示される機関回転数)の変化量、すなわち、表示機関回転数の変化率が予め定められた変化率よりも小さい。このため、本発明によっても、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができるのである。
【0021】
なお、上記別の発明の補正機関回転数は如何なる機関回転数であってもよく、たとえば、この補正機関回転数として、実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を採用することができる。
【0022】
また、上記発明の燃費以外の内燃機関に関する性能は如何なる性能であってもよく、たとえば、この性能として、内燃機関の運転に起因して発生する振動を採用することができ、あるいは、内燃機関の運転に起因して発生する音を採用することができ、あるいは、内燃機関の運転に起因して発生する振動と音とを採用することができる。
【0023】
あるいは、機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、本願のさらに別の発明の制御装置は、要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0024】
ここで、本発明の制御装置は、要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させる。
【0025】
一方、本発明の制御装置は、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0026】
本発明によっても、上述した理由と同様の理由から、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。
【0027】
あるいは、本願のさらに別の発明の制御装置は、上記目的を達成するために、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0028】
本発明によっても、上述した理由と同様の理由から、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。
【0029】
なお、上記さらに別の発明の補正機関回転数は如何なる機関回転数であってもよく、たとえば、この補正機関回転数として、実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を採用することができる。
【0030】
また、上記発明の負荷印加手段は出力軸に負荷を印加する手段であれば如何なる手段であってもよく、たとえば、前記負荷印加手段として、前記出力軸から出力される出力によって電力を発生する機能を有する発電機を採用することができる。
【0031】
また、上記発明の発電機は出力軸から出力される出力によって電力を発電する機能を有する発電機であれば如何なる発電機であってもよく、たとえば、前記発電機として、前記出力軸から出力される出力によって電力を発生する機能を有するとともに電力によって出力を出力する機能を有する発電電動機を採用することができる。
【0032】
なお、上記発明の燃料供給手段は燃焼室に燃料を供給する手段であれば如何なる手段であってもよく、たとえば、この手段として、燃焼室に燃料を直接噴射することによって燃焼室に燃料を供給する燃料噴射弁を採用することもできるし、内燃機関の吸気通路に燃料を噴射することによって燃焼室に燃料を供給する燃料噴射弁を採用することもできる。
【0033】
また、上記発明の機関回転数表示手段は機関回転数を表示する手段であれば如何なる手段であってもよく、タコメータ、この手段として、いわゆるタコメータを採用することができる。
【図面の簡単な説明】
【0034】
【図1】第1実施形態の制御装置が適用される動力装置を備えたハイブリッド車両の構成を示した図である。
【図2】図1に示されている内燃機関の詳細を示した図である。
【図3】(A)は最適機関動作ラインLOおよび許容機関動作ラインLPを示した図であり、(B)は確定機関動作ラインLFを示した図である。
【図4】第1実施形態の機関回転数の表示を実行するルーチンの一例を示した図である。
【図5】第2実施形態の機関回転数の表示を実行するルーチンの一例を示した図である。
【発明を実施するための形態】
【0035】
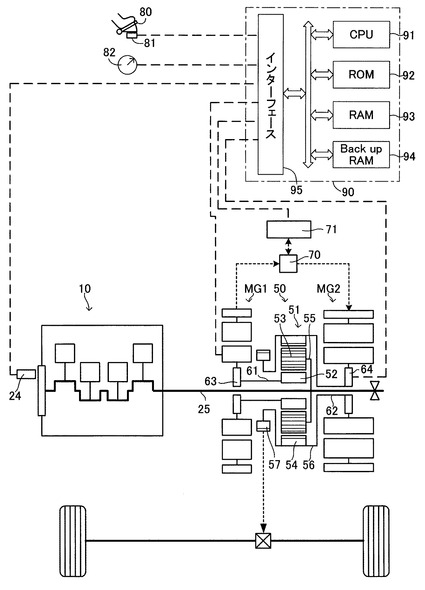
以下、本発明の動力装置の制御装置の実施形態について説明する。本発明の1つの実施形態(以下「第1実施形態」)の制御装置が適用される動力装置を備えたハイブリッド車両の構成が図1に示されている。図1において、MG1およびMG2は発電電動機(以下これら発電電動機をそれぞれ「第1発電電動機」および「第2発電電動機」という)、10は内燃機関、24はクランクポジションセンサ、50は動力分配機構、70はインバータ、71はバッテリ、80はアクセルペダル、81はアクセルペダル踏込量センサ、82はタコメータ、90は電子制御装置をそれぞれ示している。
【0036】
電子制御装置90はマイクロコンピュータからなる。また、電子制御装置90はCPU(マイクロプロセッサ)91、ROM(リードオンリメモリ)92、RAM(ランダムアクセスメモリ)93、バックアップRAM94、および、インターフェース95を有する。これらCPU91、ROM92、RAM93、バックアップRAM94、および、インターフェース95は双方向バスによって互いに接続されている。
【0037】
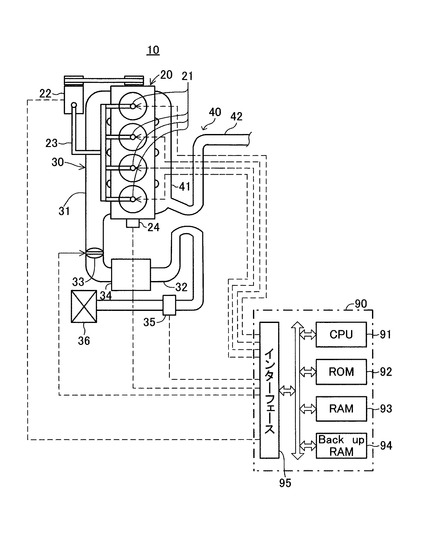
図2に内燃機関10の詳細が示されている。図2に示されている内燃機関は圧縮自着火式の内燃機関(いわゆるディーゼルエンジン)である。図2において、20は内燃機関10の本体、21は燃料噴射弁、22は燃料ポンプ、23は燃料供給通路、30は吸気通路、31は吸気マニホルド、32は吸気管、33はスロットル弁、34はインタークーラ、35はエアフローメータ、36はエアクリーナ、40は排気通路、41は排気マニホルド、42は排気管をそれぞれ示している。吸気通路30は吸気マニホルド31と吸気管32とから構成されている。排気通路40は排気マニホルド41と排気管42とから構成されている。
【0038】
燃料噴射弁21は内燃機関の本体20に取り付けられている。燃料噴射弁21には燃料供給通路23を介して燃料ポンプ22が接続されている。燃料ポンプ22は燃料噴射弁21に燃料供給通路23を介して高圧の燃料を供給する。また、燃料噴射弁21は電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は燃料噴射弁21に燃料を噴射させるための指令信号を燃料噴射弁21に供給する。また、燃料ポンプ22も電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は燃料ポンプ22から燃料噴射弁21に供給される燃料の圧力が予め定められた圧力に維持されるように燃料ポンプ22の作動を制御する制御信号を燃料ポンプ22に供給する。なお、燃料噴射弁21はその燃料噴射孔が燃焼室内に露出するように内燃機関の本体20に取り付けられている。したがって、電子制御装置90から燃料噴射弁21に指令信号が供給されると燃料噴射弁21は燃焼室内に燃料を直接噴射する。
【0039】
吸気マニホルド31はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている吸気ポート(図示せず)に接続されている。また、吸気マニホルド31はその他端で吸気管32の一端に接続されている。排気マニホルド41はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている排気ポート(図示せず)に接続されている。また、排気マニホルド41はその他端で排気管42の一端に接続されている。
【0040】
スロットル弁33は吸気管32に配置されている。また、スロットル弁33の開度(以下この開度を「スロットル弁開度」という)が変更されるとスロットル弁33が配置された領域における吸気管32内の流路面積が変わる。これによってスロットル弁33を通過する空気の量が変わり、ひいては、燃焼室に吸入される空気の量が変わる。スロットル弁33にはその動作状態(すなわち、スロットル弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「スロットル弁アクチュエータ」という)が接続されている。スロットル弁アクチュエータは電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90はスロットル弁開度を目標スロットル弁開度に制御するようにスロットル弁アクチュエータを駆動するための制御信号をスロットル弁アクチュエータに供給する。
【0041】
インタークーラ34はスロットル弁33よりも上流において吸気管32に配置されている。インタークーラ34はそこに流入する空気を冷却する。
【0042】
内燃機関10は燃焼室に吸入される空気と燃料噴射弁21から噴射される燃料とによって混合気を形成し、この混合気を圧縮することによって自着火させ、混合気中の燃料を燃焼させる。燃焼室において燃料が燃焼するとクランクシャフト25にトルクが出力される。
【0043】
エアフローメータ35はインタークーラ34よりも上流において吸気管32に配置されている。また、エアフローメータ35は電子制御装置90のインターフェース95に電気的に接続されている。エアフローメータ35はそこを通過する空気の量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいてエアフローメータ35を通過する空気の量、ひいては、燃焼室に吸入される空気の量を算出する。
【0044】
クランクポジションセンサ24は内燃機関の出力軸25、すなわち、クランクシャフト25近傍に配置されている。また、クランクポジションセンサ24は電子制御装置90のインターフェース95に電気的に接続されている。クランクポジションセンサ24はクランクシャフト25の回転位相に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいて機関回転数(すなわち、内燃機関のクランクシャフト25の回転数)を算出する。
【0045】
動力分配装置50は遊星歯車装置51を有する。遊星歯車装置51はサンギア52とプラネタリギア53とリングギア54とを有する。プラネタリギア53はサンギア52に噛合せしめられているとともに、リングギア54に噛合せしめられている。サンギア52は第1発電電動機MG1のシャフト(以下このシャフトを「第1シャフト」という)61に接続されている。したがって、第1発電電動機MG1はサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動可能であるし、サンギア52にトルクを出力可能である。そして、第1発電電動機MG1がサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動されることによって発電可能である。リングギア54はリングギアキャリア56を介して第2発電電動機MG2のシャフト(以下このシャフトを「第2シャフト」という)62に接続されている。したがって、第2発電電動機MG2はリングギア54にトルクを出力可能であるし、リングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動可能である。そして、第2発電電動機MG2がリングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動されることによって発電可能である。
【0046】
プラネタリギア53はプラネタリギアキャリア55を介してクランクシャフト25に接続されている。したがって、プラネタリギア53はクランクシャフト25から当該プラネタリギア53に入力されるトルクによって回転駆動せしめられる。また、プラネタリギア53はサンギア52およびリングギア54に噛合されている。したがって、プラネタリギア53からサンギア52にトルクが入力されたときには、そのトルクによってサンギア52が回転駆動されるし、プラネタリギア53からリングギア54にトルクが入力されたときには、そのトルクによってリングギア54が回転駆動される。逆に、サンギア52からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動されるし、リングギア54からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動される。
【0047】
リングギア54はリングギアキャリア56を介して出力ギア57に接続されている。したがって、出力ギア57はリングギア54から当該出力ギア57に入力されるトルクによって回転駆動されるし、リングギア54は出力ギア57から当該リングギア54に入力されるトルクによって回転駆動される。
【0048】
また、第1発電電動機MG1は当該第1発電電動機MG1の回転角度に対応する出力値を出力するレゾルバ63を有する。このレゾルバ63は電子制御装置90のインターフェース95に接続されており、その出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいて第1発電電動機の回転数(以下この回転数を「第1MG回転数」という)を算出する。一方、第2発電電動機MG2は当該第2発電電動機の回転角度に対応する出力値を出力するレゾルバ64を有する。このレゾルバ64は電子制御装置90のインターフェース95に接続されており、その出力値は出90に入力される。電子制御装置90はこの出力値に基づいて第2発電電動機の回転数(以下この回転数を「第2MG回転数」という)を算出する。
【0049】
また、第1発電電動機MG1はインバータ70を介してバッテリ71に電気的に接続されている。したがって、第1発電電動機MG1が電力を発電しているときには、第1発電電動機MG1が発電した電力(以下この電力を「第1発電電力」という)はインバータ70を介してバッテリ71に供給可能である。また、第1発電電動機MG1はバッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第1発電電動機MG1に加えられる制御トルク(以下この制御トルクを「第1制御トルク」という)を制御することによってその回転数が制御可能に構成されている。
【0050】
また、第2発電電動機MG2はインバータ70を介してバッテリ71に電気的に接続されている。したがって、第2発電電動機MG2はバッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第2発電電動機MG2に加えられる制御トルク(以下この制御トルクを「第2制御トルク」という)を制御することによってその回転数が制御可能である。また、第2発電電動機MG2が電力を発電しているときには、第2発電電動機MG2が発電した電力(以下この電力を「第2発電電力」という)はインバータ70を介してバッテリ71に供給可能である。
【0051】
なお、第1発電電力は第2発電電動機MG2に直接供給可能でもあるし、第2発電電力は第1発電電動機に直接供給可能でもある。
【0052】
また、バッテリ71は電子制御装置90のインターフェース95に接続されている。そして、バッテリ蓄電量(すなわち、バッテリ71に蓄電されている電力量)は電子制御装置90のインターフェース95に入力される。また、インバータ70も電子制御装置90のインターフェース95に接続されている。そして、インターフェース95を介して電子制御装置90から送られる指令によってインバータ70から第2発電電動機MG2に供給される電力量および第1発電電動機MG1に供給される電力量が制御される。
【0053】
また、出力ギア57はギア列65を介してディファレンシャルギア66に接続されている。ディファレンシャルギア66はドライブシャフト67に取り付けられている。ドライブシャフト67の両端には駆動輪68が取り付けられている。したがって、出力ギア57からのトルクはギア列65、ディファレンシャルギア66、および、ドライブシャフト67を介して駆動輪68に伝達される。
【0054】
アクセルペダル踏込量センサ81は電子制御装置90のインターフェース95に電気的に接続されている。アクセルペダル踏込量センサ81はアクセルペダル80の踏込量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいてアクセルペダル80の踏込量、ひいては、動力装置に要求されている出力を算出する。なお、第1実施形態の動力装置は、概して、内燃機関10と第1発電電動機MG1と第2発電電動機MG2とから構成されている。
【0055】
次に、第1実施形態の制御装置による機関トルク、第1制御トルク、および、第2制御トルクの制御の一例について説明する。なお、以下の説明において「機関トルク」とは「内燃機関のクランクシャフトから出力されるトルク」であり、「機関動作点」とは「機関トルクと機関回転数とによって規定される内燃機関の動作点または内燃機関の動作状態」であり、「要求出力」とは「内燃機関のクランクシャフトから出力される出力として要求される出力」であり、「アクセル踏込量」とは「アクセルペダルの踏込量」であり、「車速」とは「ハイブリッド車両の走行速度」であり、「燃料噴射量」とは「燃料噴射弁から噴射される燃料の量」である。
【0056】
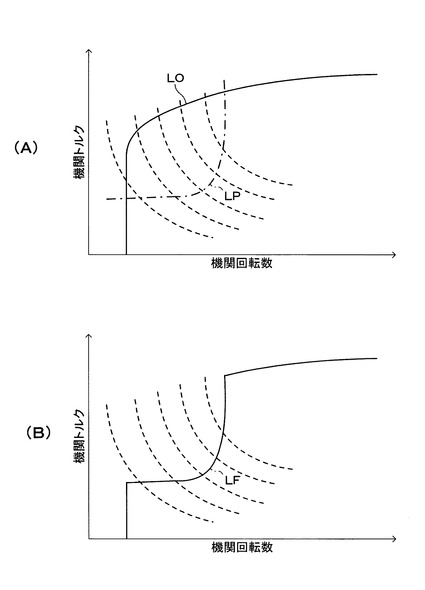
第1実施形態では、要求出力をクランクシャフトから出力させたときに燃費が最も高くなる機関動作点が要求出力毎に最適機関動作点として実験等によって予め求められる。そして、これら最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインが最適機関動作ラインとして求められる。斯くして求められた最適機関動作ラインが図3(A)に実線LOで示されているラインである。なお、図3(A)において、鎖線で示されているラインは同じ出力をクランクシャフトから出力されることができる機関動作点を結んだラインである。
【0057】
また、第1実施形態では、内燃機関の運転に起因して発生する振動および音のレベルが予め定められた許容範囲内のレベルとなる機関動作点が要求出力毎に許容機関動作点として実験等によって予め求められる。そして、これら許容機関動作点によって規定される領域を許容機関動作領域と称したとき、この許容機関動作領域の境界をなす機関動作点が境界許容機関動作点として求められる。そして、これら境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインが許容機関動作ラインとして求められる。斯くして求められた許容機関動作ラインが図3(A)に一点鎖線LPで示されているラインである。
【0058】
そして、許容機関動作点領域内にある最適機関動作ラインLOの部分と、許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する境界許容機関動作点によって形成される許容機関動作ラインLPの部分と、によって形成されるラインが確定機関動作ラインとして求められる。斯くして求められた確定機関動作ラインが図3(B)に実線LFで示されているラインである。そして、確定機関動作ラインLFに関するデータが電子制御装置90に記憶されている。
【0059】
そして、内燃機関の運転中、アクセル踏込量と車速とに基づいて要求出力が算出される。そして、この算出された要求出力を内燃機関から出力させることができる確定機関動作ラインLF上の機関動作点が選択される。そして、この選択された機関動作点を規定する機関トルクおよび機関回転数がそれぞれ目標機関トルクおよび目標機関回転数に設定される。そして、この設定された目標機関トルクおよび目標機関回転数が達成されるように燃料噴射量および機関回転数が制御される。
【0060】
ところで、第2MG回転数が一定である場合、第1MG回転数が変化すれば機関回転数も変化する。別の言い方をすれば、第1MG回転数を制御することによって機関回転数を制御することができる。そして、第1MG回転数を「NMG1」で表し、第2MG回転数を「NMG2」で表し、機関回転数を「NE」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、第1MG回転数と機関回転数との間には次式1の関係がある。
【0061】
NMG1=(NE−NMG2)/ρ+NE …(1)
【0062】
したがって、目標第1MG回転数を「TNMG1」で表し、目標機関回転数を「TNE」で表したとき、目標第1MG回転数と目標機関回転数との間には次式2の関係があることになる。
【0063】
TNMG1=(TNE−NMG2)/ρ+TNE …(2)
【0064】
そこで、第1実施形態では、要求出力に応じて選択される機関動作点に従って設定される目標機関回転数TNEと現在の第2MG回転数NMG2とを利用して上式2から目標第1MG回転数TNMG1が算出される。そして、斯くして算出された目標第1MG回転数TNMG1に対する現在の第1MG回転数NMG1の偏差(=TNMG1−NMG1)が算出される。そして、この算出された偏差が零になるように第1制御トルクが制御される。
【0065】
ところで、機関トルクを「TQE」で表し、リングギア(すなわち、駆動輪)に入力される機関トルク(以下この機関トルクを「リングギア入力機関トルク」という)を「TQEr」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、リングギア入力機関トルクと機関トルクとの間には次式3の関係がある。
【0066】
TQEr=1/(1+ρ)×TQE …(3)
【0067】
すなわち、リングギア入力機関トルクTQErは機関トルクTQEの一部である。したがって、リングギア入力機関トルクTQErは要求駆動トルク(すなわち、駆動輪68に入力されるべきトルク)よりも小さい。そこで、第1実施形態では、要求駆動トルクとリングギア入力機関トルクTQErとの差に相当するトルクが第2発電電動機からリングギアに入力されるように第2制御トルクが制御される。斯くして、要求駆動トルクに等しいトルクがリングギアに入力されることになる。
【0068】
なお、上記説明は、第1発電電動機が発電機として機能し、第2発電電動機が電電動機として機能している場合の説明である。しかしながら、ハイブリッド車両に要求される条件によっては第1発電電動機が電動機として機能したり、第2発電電動機が発電機として機能したり、第1発電電動機が発電機としても電動機としても機能しなかったり、第2発電電動機が発電機としても電動機としても機能しなかったりすることもある。また、第1実施形態では、内燃機関が運転されている。しかしながら、ハイブリッド車両に要求される条件によっては内燃機関が運転されないこともある。
【0069】
次に、第1実施形態の機関回転数の表示について説明する。第1実施形態では、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が最適機関動作点であり、この最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がそのままタコメータに表示される。
【0070】
一方、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が境界許容機関動作点であり、この境界許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がなまし処理によって補正され、斯くして補正された機関回転数がタコメータに表示される。
【0071】
なお、第1実施形態において機関回転数の補正に用いられるなまし処理は如何なる形態の処理であってもよく、たとえば、このなまし処理として、次式4に従った処理を採用することができる。なお、クランクポジションセンサの出力値に基づいた電子制御装置による機関回転数の算出は所定の演算サイクルでもって実行される。そして、式4において「Yn(k)」は「タコメータに表示させる機関回転数として今回算出される機関回転数」であり、「Xn」は「今回の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Yn(k−1)」は「1演算サイクルだけ前に式4によって算出された機関回転数」である。また、「A」は「なまし度合を決定する係数」であり、所望のなまし度合に応じて「0」よりも大きく「1」よりも小さい値に設定される。
【0072】
Yn(k)=A×Xn(k)+(1−A)×Yn(k−1) …(4)
【0073】
また、第1実施形態において機関回転数の補正に用いられるなまし処理として、次式5に従った処理を採用することもできる。なお、ここでも、クランクポジションセンサの出力値に基づいた電子制御装置による機関回転数の算出は所定の演算サイクルでもって実行される。そして、式5において「Yn(k)」は「タコメータに表示させる機関回転数として今回算出される機関回転数」であり、「Xn(k)」は「今回の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−1)」は「1演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−1)」は「2演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−n)」は「n演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「n+1」は「式5の右辺において加算される機関回転数の数」である。
【0074】
Yn(k)=(Xn(k)+Xn(k−1)+Xn(k−2)+・・・+Xn(k−n))/(n+1) …(5)
【0075】
次に、第1実施形態の機関回転数の表示の利点について説明する。第1実施形態によれば、タコメータに表示された機関回転数を見た者(たとえば、ハイブリッド車両の運転者)に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、上述した構成を有する動力装置に関して上述したように内燃機関の動作が制御される場合において、要求出力に応じて選択される機関動作点が境界許容機関動作点であるときに要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「境界許容機関動作点の利用時の機関回転数変化率」と称し、要求出力に応じて選択される機関動作点が最適機関動作点であるときに要求出力の変化に伴って選択される最適機関動作点が変更され、斯くして変更される最適機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「最適機関動作点の利用時の機関回転数変化率」と称したとき、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化率は、最適機関動作点の利用時の機関回転数変化率よりも大きい。したがって、このときに実際の機関回転数をそのままタコメータに表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0076】
しかしながら、第1実施形態では、単位要求出力変化量に対するタコメータに表示される機関回転数の変化量を「表示機関回転数変化率」と称したとき、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数をなまし処理によって補正することによって得られる機関回転数がタコメータによって表示される。実際の機関回転数をなまし処理によって補正することによって得られる機関回転数をタコメータに表示させた場合、表示機関回転数変化率が小さくなる。このため、第1実施形態によれば、タコメータに表示された機関回転数を見た者に上記違和感が生じることを抑制することができるのである。
【0077】
また、第1実施形態によれば、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができる。すなわち、上記違和感が生じることを抑制する手段として、たとえば、以下の手段を採用することもできる。すなわち、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときに単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせる程度の変化量になることが予測された場合、許容機関動作領域内の許容機関動作点のうち、単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を選択し、斯くして選択された許容機関動作点に従って内燃機関を動作させ、このときの実際の機関回転数をそのままタコメータに表示させるという手段を採用することができる。この手段によれば、実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量であることから、実際の機関回転数をそのままタコメータに表示させたとしても、上記違和感が生じることはない。
【0078】
ところが、許容機関動作点に従った内燃機関を動作させるとき、境界許容機関動作点に従って内燃機関を動作させた場合の燃費が最も高い。したがって、上述したように実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を許容機関動作領域から選択して同選択された許容機関動作点に従って内燃機関が動作せしめられた場合、同選択された許容機関動作点が境界許容機関動作点以外の許容機関動作点であったときにはそのときの燃費は境界許容機関動作点に従って内燃機関を動作させた場合の燃費に比べて低い。
【0079】
しかしながら、第1実施形態によれば、上記違和感が生じることを抑制するために境界許容機関動作点以外の許容機関動作点に従って内燃機関を動作させることはないことから、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができるのである。
【0080】
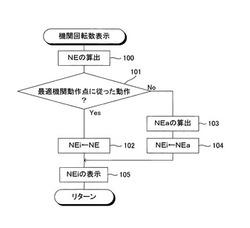
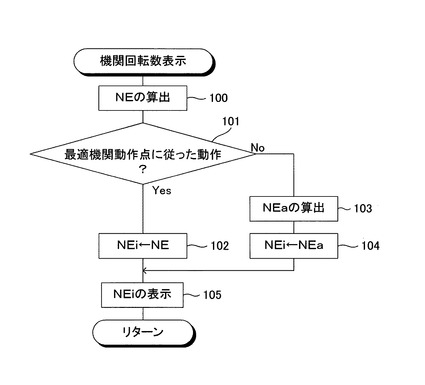
次に、第1実施形態の機関回転数の表示を実行するルーチンの一例について説明する。このルーチンの一例が図4に示されている。このルーチンは所定の演算サイクル毎に実行されるルーチンである。
【0081】
図4のルーチンが開始されると、始めに、ステップ100においてクランクポジションセンサの出力値に基づいて機関回転数NEが算出される。次いで、ステップ101において、最適機関動作点に従って内燃機関が動作せしめられているか否かが判別される。ここで、最適機関動作点に従って内燃機関が動作せしめられていると判別されたときには、ルーチンはステップ102に進む。一方、最適機関動作点に従って内燃機関が動作せしめられていない(すなわち、境界許容機関動作点に従って内燃機関が動作せしめられている)と判別されたときには、ルーチンはステップ103に進む。
【0082】
ステップ101において最適機関動作点に従って内燃機関が動作せしめられていると判別され、ルーチンがステップ102に進むと、ステップ100で算出された機関回転数NEがそのまま表示機関回転数(すなわち、タコメータによって表示されるべき機関回転数)NEiに入力され、ルーチンがステップ105に進む。
【0083】
ステップ101において最適機関動作点に従って内燃機関が動作せしめられていないと判別され、ルーチンがステップ103に進むと、ステップ100で算出された機関回転数NEが上式4に従ったなまし処理によって補正されることによって補正機関回転数NEaが算出される。次いで、ステップ104において、ステップ103で算出された補正機関回転数NEaが表示機関回転数NEiに入力され、ルーチンがステップ105に進む。
【0084】
ステップ105では、表示機関回転数NEiがタコメータによって表示される。ここで、ステップ101で最適機関動作点に従って内燃機関が動作せしめられていると判別されてルーチンがステップ102を経由してステップ105に進んだときには、ステップ100で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ101で最適機関動作点に従って内燃機関が動作せしめられていないと判別されてルーチンがステップ103およびステップ104を経由してステップ105に進んだときには、ステップ103で算出された補正機関回転数NEaがタコメータによって表示されることになる。
【0085】
次に、第2実施形態の動力装置の制御装置について説明する。なお、第2実施形態は機関回転数の表示に関してのみ第1実施形態とは異なる。したがって、以下、主に第2実施形態の機関回転数の表示について説明し、第1実施形態の構成を同じ第2実施形態の構成の説明は省略する。
【0086】
第2実施形態では、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が最適機関動作点であり、この最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がそのままタコメータに表示される。
【0087】
一方、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が境界許容機関動作点であり、この境界許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、タコメータによって表示される要求出力の変化に対する機関回転数の変化率が予め定められた変化率よりも小さくなるように(すなわち、要求出力の変化量に対する機関回転数の変化量が予め定められた変化量よりも小さくなるように)クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数が補正され、斯くして補正された機関回転数がタコメータによって表示される。
【0088】
次に、第2実施形態の機関回転数の表示の利点について説明する。第2実施形態によれば、タコメータに表示された機関回転数を見た者(たとえば、ハイブリッド車両の運転者)に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、第1実施形態に関連して説明したように、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化率は、最適機関動作点の利用時の機関回転数変化率よりも大きい。したがって、このときに実際の機関回転数をそのままタコメータに表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0089】
しかしながら、第2実施形態では、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数を表示機関回転数変化率が予め定められた変化率よりも小さくなるようにクランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数を補正することによって得られる機関回転数をタコメータに表示させる。このため、第2実施形態によれば、タコメータに表示された機関回転数を見た者に上記違和感が生じることを抑制することができるのである。
【0090】
また、第2実施形態によれば、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができる。すなわち、第1実施形態に関連して説明したように、上記違和感が生じることを抑制する手段として、たとえば、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときに単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせる程度の変化量になることが予測された場合、許容機関動作領域内の許容機関動作点のうち、単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を選択し、斯くして選択された許容機関動作点に従って内燃機関を動作させ、このときの実際の機関回転数をそのままタコメータに表示させるという手段を採用することができる。そして、この手段によれば、実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量であることから、実際の機関回転数をそのままタコメータに表示させたとしても、上記違和感が生じることはない。
【0091】
ところが、このように実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を許容機関動作領域から選択して同選択された許容機関動作点に従って内燃機関が動作せしめられた場合、同選択された許容機関動作点が境界許容機関動作点以外の許容機関動作点であったときにはそのときの燃費は境界許容機関動作点に従って内燃機関を動作させた場合の燃費に比べて低い。
【0092】
しかしながら、第2実施形態によれば、上記違和感が生じることを抑制するために境界許容機関動作点以外の許容機関動作点に従って内燃機関を動作させることはないことから、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができるのである。
【0093】
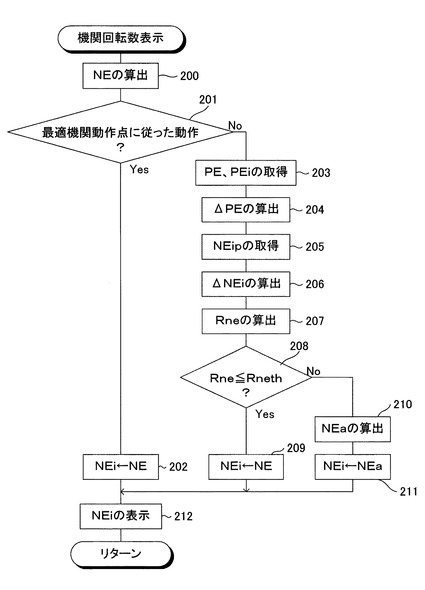
次に、第2実施形態の機関回転数の表示を実行するルーチンの一例について説明する。このルーチンの一例が図5に示されている。このルーチンは所定の演算サイクル毎に実行されるルーチンである。
【0094】
図5のルーチンが開始されると、始めに、ステップ200においてクランクポジションセンサの出力値に基づいて機関回転数NEが算出される。次いで、ステップ201において、最適機関動作点に従って内燃機関が動作せしめられているか否かが判別される。ここで、最適機関動作点に従って内燃機関が動作せしめられていると判別されたときには、ルーチンはステップ202に進む。一方、最適機関動作点に従って内燃機関が動作せしめられていない(すなわち、境界許容機関動作点に従って内燃機関が動作せしめられている)と判別されたときには、ルーチンはステップ203に進む。
【0095】
ステップ201において最適機関動作点に従って内燃機関が動作せしめられていると判別され、ルーチンがステップ202に進むと、ステップ200で算出された機関回転数NEがそのまま表示機関回転数(すなわち、タコメータによって表示されるべき機関回転数)NEiに入力され、ルーチンがステップ212に進む。
【0096】
ステップ201において最適機関動作点に従って内燃機関が動作せしめられていないと判別され、ルーチンがステップ203に進むと、現在の要求出力PEと前回の本ルーチンの実行時の要求出力PEiとが取得される。次いで、ステップ204において、ステップ203で取得された現在の要求出力PEと前回の本ルーチンの実行時の要求出力PEiとに基づいて前回の本ルーチンの実行時から現在までの要求出力の変化量ΔPE(=PE−PEi)が算出される。次いで、ステップ205において、前回の本ルーチンのステップ212でタコメータによって表示された表示機関回転数NEipが取得される。次いで、ステップ206においてステップ200で算出された機関回転数NEとステップ203で取得された表示機関回転数NEipとに基づいてステップ200で算出された機関回転数NEをステップ212においてタコメータに表示させた場合のタコメータによって表示された表示機関回転数の変化量ΔNEi(=NE−NEip)が算出される。次いで、ステップ207において、ステップ204で算出された要求出力の変化量ΔPEとステップ207で算出された表示機関回転数の変化量ΔNEiとに基づいて前回の本ルーチンの実行時から現在までの単位要求変化量に対する表示機関回転数の変化量(すなわち、表示機関回転数の変化率)Rne(=ΔNEi/ΔPE)が算出される。
【0097】
次いで、ステップ208において、ステップ207で算出された表示機関回転数の変化率Rneが予め定められた変化率Rneth以下である(Rne≦Rneth)か否かが判別される。ここで、Rne≦Rnethであると判別されたときには、ルーチンはステップ209に進む。一方、Rne≦Rnethではないと判別されたときには、ルーチンはステップ210に進む。
【0098】
ステップ208においてRne≦Rnethであると判別され、ルーチンがステップ209に進むと、ステップ200で算出された機関回転数NEがそのまま表示機関回転数NEiに入力され、ルーチンがステップ212に進む。
【0099】
ステップ208においてRne≦Rnethではないと判別され、ルーチンがステップ210に進むと、Rne≦Rneとなるようにステップ200で算出された機関回転数NEが補正されることによって補正機関回転数NEaが算出される。次いで、ステップ211において、ステップ210で算出された補正機関回転数NEaが表示機関回転数NEiに入力され、ルーチンがステップ212に進む。
【0100】
ステップ212では、表示機関回転数NEiがタコメータによって表示される。ここで、ステップ201で最適機関動作点に従って内燃機関が動作せしめられていると判別されてルーチンがステップ202を経由してステップ212に進んだときには、ステップ200で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ201で最適機関動作点に従って内燃機関が動作せしめられていないと判別され且つステップ208でRne≦Rnethであると判別されてルーチンがステップ209を経由してステップ212に進んだときにも、ステップ200で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ201において最適機関動作点に従って内燃機関が動作せしめられていないと判別され且つステップ208でRne≦Rnethではないと判別されてルーチンがステップ210およびステップ211を経由してステップ212に進んだときには、ステップ210で算出された補正機関回転数NEaがタコメータによって表示されることになる。
【0101】
なお、上述した実施形態は、ハイブリッド車両の動力装置に本発明を適用した場合の実施形態である。しかしながら、本発明はハイブリッド車両の動力装置以外の動力装置にも適用可能であり、広くは、内燃機関と該内燃機関の出力軸に負荷を印加する負荷印加手段とを具備し、該負荷印加手段によって出力軸に印加される負荷を制御することによって機関回転数が制御される動力装置に適用可能である。
【0102】
また、上述した実施形態は、内燃機関の運転に起因して発生する振動および音のレベルが予め定められた許容範囲内のレベルとなる機関動作点が許容機関動作点である場合に本発明を適用した実施形態である。しかしながら、本発明はこうした機関動作点が許容機関動作点である場合以外の場合にも適用可能であり、たとえば、内燃機関から排出される排気ガスの性状(たとえば、いわゆる排気エミッション量)が予め定められた許容範囲内の性状となる機関動作点が許容機関動作点である場合にも適用可能である。したがって、本発明は、広くは、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点が許容機関動作点である場合に適用可能である。
【0103】
また、上述した実施形態は本発明を圧縮自着火式の内燃機関を具備する動力装置に適用した場合の実施形態であるが、本発明は火花点火式の内燃機関(いわゆるガソリンエンジン)を具備する動力装置にも適用可能である。
【符号の説明】
【0104】
10…内燃機関、21…燃料噴射弁、25…クランクシャフト(出力軸)、82…タコメータ、90…電子制御装置、MG1…第1発電電動機、MG2…第2発電電動機
【技術分野】
【0001】
本発明は動力装置の制御装置に関する。
【背景技術】
【0002】
特許文献1にいわゆるハイブリッド車両の動力装置の制御装置が記載されている。特許文献1に記載の動力装置は内燃機関と発電電動機(すなわち、モータジェネレータ)とを具備する。
【0003】
ところで、内燃機関の出力軸から出力されるトルクを「機関トルク」と称し、内燃機関の出力軸の回転数を「機関回転数」と称し、これら機関トルクと機関回転数とによって規定される内燃機関の動作点を「機関動作点」と称し、内燃機関の出力軸から出力される出力として要求される出力を「要求出力」と称したとき、特許文献1に記載されているように、内燃機関には、要求出力に対応する出力を内燃機関の出力軸から出力させたときに燃費が最も高くなる機関動作点(以下この機関動作点を「最適機関動作点」という)が存在する。
【0004】
一方、内燃機関には、その運転に起因して発生する振動や音のレベルが許容されるレベル以下に収まる機関動作点(以下この機関動作点を「許容機関動作点」という)が存在する。そして、これら許容機関動作点によって規定される内燃機関の動作領域を「許容機関動作領域」と称したとき、特許文献1に記載されているように、許容機関動作領域内にない最適機関動作点が存在する。したがって、許容機関動作領域内にない最適機関動作点を規定する機関トルクおよび機関回転数をそれぞれ目標機関トルクおよび目標機関回転数としてこれら目標機関トルクおよび目標機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御した場合、許容されるレベルよりも大きい振動や音が内燃機関から発生することになる。
【0005】
このように許容されるレベルよりも大きい振動や音が内燃機関から発生することを避けるために、特許文献1に記載の制御装置は、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点であるときには同最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御し、一方、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点ではないときには要求出力に対応して選択される許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御するようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−163090号公報
【特許文献2】特開2000−289489号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、許容機関動作点とそれを規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられたときに内燃機関の出力軸から出力される出力(以下この出力を「機関出力」という)との間の関係の性質上、一般的に、許容機関動作点に従って内燃機関が動作せしめられている状況下において要求出力が変わり、許容機関動作点が変更され、それに従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量は、最適機関動作点に従って内燃機関が動作せしめられている場合のそれに比べて大きい。
【0008】
つまり、たとえば、ハイブリッド車両の運転者がハイブリッド車両を加速しようとしてアクセルペダルを踏み込んだとき、アクセルペダルの踏込量の変化量が同じであっても、許容機関動作点に従って内燃機関が動作せしめられていると、最適機関動作点に従って内燃機関が動作せしめられている場合に比べて、機関回転数が大きく上昇することになる。そして、制御装置が機関回転数を表示する機関回転数表示手段(たとえば、タコメータ)を具備しており、許容機関動作点に従って内燃機関が動作せしめられているときの実際の機関回転数が上記機関回転数表示手段に表示されると、その表示を見た運転者にアクセルペダルの踏込量の変化量と機関回転数の上昇量との間の関係に関して違和感が生じる可能性がある。すなわち、アクセルペダルの踏込量に対して予想以上に機関回転数が上昇したといった違和感が運転者に生じる可能性がある。このことは、運転者がハイブリッド車両を減速しようとしてアクセルペダルの踏込量を小さくしたときにも当てはまる。
【0009】
そして、このことは、一般的に、上述した構成とは異なる構成を有する動力装置であっても、その動力装置が内燃機関を具備し、その動力装置の制御装置が要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点であるときには同最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御し、一方、要求出力に対応して選択される最適機関動作点が許容機関動作領域内の機関動作点ではないときには要求出力に対応して選択される許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関の動作および発電電動機の動作を制御するようにしている場合にも当てはまる。すなわち、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じる。
【0010】
本願の発明の目的は、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することにある。
【課題を解決するための手段】
【0011】
本願の発明は、燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置に関する。
【0012】
そして、本発明の制御装置は、前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御する。
【0013】
ここで、機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、本発明の制御装置は、要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0014】
一方、本発明の制御装置は、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0015】
ここで、本発明の制御装置は、機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させる。
【0016】
一方、本発明の制御装置は、上記目的を達成するために、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0017】
本発明によれば、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、上述した構成を有する動力装置に関して上述したように内燃機関の動作が制御される場合において、要求出力が変わったために要求出力に基づいて選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「境界許容機関動作点の利用時の機関回転数変化量」と称し、同様に要求出力が変わったために要求出力に基づいて選択される最適機関動作点が変更され、斯くして変更される最適機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「最適機関動作点の利用時の機関回転数変化量」と称したとき、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力(すなわち、内燃機関の出力軸から出力される出力)との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化量は、最適機関動作点の利用時の機関回転数変化量よりも大きい。したがって、このときに実際の機関回転数をそのまま機関回転数表示手段に表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0018】
しかしながら、本発明では、境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数をなまし処理によって補正することによって得られる機関回転数(すなわち、補正機関回転数)が機関回転数表示手段によって表示される。実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を機関回転数表示手段に表示させた場合、単位要求出力変化量に対する表示機関回転数(すなわち、機関回転数表示手段によって表示される機関回転数)の変化量が小さくなる。このため、本発明によれば、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができるのである。
【0019】
あるいは、本願の別の発明の制御装置は、上記目的を達成するために、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0020】
本発明によっても、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、本発明では、境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときに機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる機関回転数(すなわち、補正機関回転数)が機関回転数表示手段によって表示される。したがって、単位要求出力変化量に対する表示機関回転数(すなわち、機関回転数表示手段によって表示される機関回転数)の変化量、すなわち、表示機関回転数の変化率が予め定められた変化率よりも小さい。このため、本発明によっても、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができるのである。
【0021】
なお、上記別の発明の補正機関回転数は如何なる機関回転数であってもよく、たとえば、この補正機関回転数として、実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を採用することができる。
【0022】
また、上記発明の燃費以外の内燃機関に関する性能は如何なる性能であってもよく、たとえば、この性能として、内燃機関の運転に起因して発生する振動を採用することができ、あるいは、内燃機関の運転に起因して発生する音を採用することができ、あるいは、内燃機関の運転に起因して発生する振動と音とを採用することができる。
【0023】
あるいは、機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、本願のさらに別の発明の制御装置は、要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する。
【0024】
ここで、本発明の制御装置は、要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させる。
【0025】
一方、本発明の制御装置は、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0026】
本発明によっても、上述した理由と同様の理由から、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。
【0027】
あるいは、本願のさらに別の発明の制御装置は、上記目的を達成するために、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【0028】
本発明によっても、上述した理由と同様の理由から、機関回転数表示手段に表示された機関回転数を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。
【0029】
なお、上記さらに別の発明の補正機関回転数は如何なる機関回転数であってもよく、たとえば、この補正機関回転数として、実際の機関回転数をなまし処理によって補正することによって得られる機関回転数を採用することができる。
【0030】
また、上記発明の負荷印加手段は出力軸に負荷を印加する手段であれば如何なる手段であってもよく、たとえば、前記負荷印加手段として、前記出力軸から出力される出力によって電力を発生する機能を有する発電機を採用することができる。
【0031】
また、上記発明の発電機は出力軸から出力される出力によって電力を発電する機能を有する発電機であれば如何なる発電機であってもよく、たとえば、前記発電機として、前記出力軸から出力される出力によって電力を発生する機能を有するとともに電力によって出力を出力する機能を有する発電電動機を採用することができる。
【0032】
なお、上記発明の燃料供給手段は燃焼室に燃料を供給する手段であれば如何なる手段であってもよく、たとえば、この手段として、燃焼室に燃料を直接噴射することによって燃焼室に燃料を供給する燃料噴射弁を採用することもできるし、内燃機関の吸気通路に燃料を噴射することによって燃焼室に燃料を供給する燃料噴射弁を採用することもできる。
【0033】
また、上記発明の機関回転数表示手段は機関回転数を表示する手段であれば如何なる手段であってもよく、タコメータ、この手段として、いわゆるタコメータを採用することができる。
【図面の簡単な説明】
【0034】
【図1】第1実施形態の制御装置が適用される動力装置を備えたハイブリッド車両の構成を示した図である。
【図2】図1に示されている内燃機関の詳細を示した図である。
【図3】(A)は最適機関動作ラインLOおよび許容機関動作ラインLPを示した図であり、(B)は確定機関動作ラインLFを示した図である。
【図4】第1実施形態の機関回転数の表示を実行するルーチンの一例を示した図である。
【図5】第2実施形態の機関回転数の表示を実行するルーチンの一例を示した図である。
【発明を実施するための形態】
【0035】
以下、本発明の動力装置の制御装置の実施形態について説明する。本発明の1つの実施形態(以下「第1実施形態」)の制御装置が適用される動力装置を備えたハイブリッド車両の構成が図1に示されている。図1において、MG1およびMG2は発電電動機(以下これら発電電動機をそれぞれ「第1発電電動機」および「第2発電電動機」という)、10は内燃機関、24はクランクポジションセンサ、50は動力分配機構、70はインバータ、71はバッテリ、80はアクセルペダル、81はアクセルペダル踏込量センサ、82はタコメータ、90は電子制御装置をそれぞれ示している。
【0036】
電子制御装置90はマイクロコンピュータからなる。また、電子制御装置90はCPU(マイクロプロセッサ)91、ROM(リードオンリメモリ)92、RAM(ランダムアクセスメモリ)93、バックアップRAM94、および、インターフェース95を有する。これらCPU91、ROM92、RAM93、バックアップRAM94、および、インターフェース95は双方向バスによって互いに接続されている。
【0037】
図2に内燃機関10の詳細が示されている。図2に示されている内燃機関は圧縮自着火式の内燃機関(いわゆるディーゼルエンジン)である。図2において、20は内燃機関10の本体、21は燃料噴射弁、22は燃料ポンプ、23は燃料供給通路、30は吸気通路、31は吸気マニホルド、32は吸気管、33はスロットル弁、34はインタークーラ、35はエアフローメータ、36はエアクリーナ、40は排気通路、41は排気マニホルド、42は排気管をそれぞれ示している。吸気通路30は吸気マニホルド31と吸気管32とから構成されている。排気通路40は排気マニホルド41と排気管42とから構成されている。
【0038】
燃料噴射弁21は内燃機関の本体20に取り付けられている。燃料噴射弁21には燃料供給通路23を介して燃料ポンプ22が接続されている。燃料ポンプ22は燃料噴射弁21に燃料供給通路23を介して高圧の燃料を供給する。また、燃料噴射弁21は電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は燃料噴射弁21に燃料を噴射させるための指令信号を燃料噴射弁21に供給する。また、燃料ポンプ22も電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は燃料ポンプ22から燃料噴射弁21に供給される燃料の圧力が予め定められた圧力に維持されるように燃料ポンプ22の作動を制御する制御信号を燃料ポンプ22に供給する。なお、燃料噴射弁21はその燃料噴射孔が燃焼室内に露出するように内燃機関の本体20に取り付けられている。したがって、電子制御装置90から燃料噴射弁21に指令信号が供給されると燃料噴射弁21は燃焼室内に燃料を直接噴射する。
【0039】
吸気マニホルド31はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている吸気ポート(図示せず)に接続されている。また、吸気マニホルド31はその他端で吸気管32の一端に接続されている。排気マニホルド41はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている排気ポート(図示せず)に接続されている。また、排気マニホルド41はその他端で排気管42の一端に接続されている。
【0040】
スロットル弁33は吸気管32に配置されている。また、スロットル弁33の開度(以下この開度を「スロットル弁開度」という)が変更されるとスロットル弁33が配置された領域における吸気管32内の流路面積が変わる。これによってスロットル弁33を通過する空気の量が変わり、ひいては、燃焼室に吸入される空気の量が変わる。スロットル弁33にはその動作状態(すなわち、スロットル弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「スロットル弁アクチュエータ」という)が接続されている。スロットル弁アクチュエータは電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90はスロットル弁開度を目標スロットル弁開度に制御するようにスロットル弁アクチュエータを駆動するための制御信号をスロットル弁アクチュエータに供給する。
【0041】
インタークーラ34はスロットル弁33よりも上流において吸気管32に配置されている。インタークーラ34はそこに流入する空気を冷却する。
【0042】
内燃機関10は燃焼室に吸入される空気と燃料噴射弁21から噴射される燃料とによって混合気を形成し、この混合気を圧縮することによって自着火させ、混合気中の燃料を燃焼させる。燃焼室において燃料が燃焼するとクランクシャフト25にトルクが出力される。
【0043】
エアフローメータ35はインタークーラ34よりも上流において吸気管32に配置されている。また、エアフローメータ35は電子制御装置90のインターフェース95に電気的に接続されている。エアフローメータ35はそこを通過する空気の量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいてエアフローメータ35を通過する空気の量、ひいては、燃焼室に吸入される空気の量を算出する。
【0044】
クランクポジションセンサ24は内燃機関の出力軸25、すなわち、クランクシャフト25近傍に配置されている。また、クランクポジションセンサ24は電子制御装置90のインターフェース95に電気的に接続されている。クランクポジションセンサ24はクランクシャフト25の回転位相に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいて機関回転数(すなわち、内燃機関のクランクシャフト25の回転数)を算出する。
【0045】
動力分配装置50は遊星歯車装置51を有する。遊星歯車装置51はサンギア52とプラネタリギア53とリングギア54とを有する。プラネタリギア53はサンギア52に噛合せしめられているとともに、リングギア54に噛合せしめられている。サンギア52は第1発電電動機MG1のシャフト(以下このシャフトを「第1シャフト」という)61に接続されている。したがって、第1発電電動機MG1はサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動可能であるし、サンギア52にトルクを出力可能である。そして、第1発電電動機MG1がサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動されることによって発電可能である。リングギア54はリングギアキャリア56を介して第2発電電動機MG2のシャフト(以下このシャフトを「第2シャフト」という)62に接続されている。したがって、第2発電電動機MG2はリングギア54にトルクを出力可能であるし、リングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動可能である。そして、第2発電電動機MG2がリングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動されることによって発電可能である。
【0046】
プラネタリギア53はプラネタリギアキャリア55を介してクランクシャフト25に接続されている。したがって、プラネタリギア53はクランクシャフト25から当該プラネタリギア53に入力されるトルクによって回転駆動せしめられる。また、プラネタリギア53はサンギア52およびリングギア54に噛合されている。したがって、プラネタリギア53からサンギア52にトルクが入力されたときには、そのトルクによってサンギア52が回転駆動されるし、プラネタリギア53からリングギア54にトルクが入力されたときには、そのトルクによってリングギア54が回転駆動される。逆に、サンギア52からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動されるし、リングギア54からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動される。
【0047】
リングギア54はリングギアキャリア56を介して出力ギア57に接続されている。したがって、出力ギア57はリングギア54から当該出力ギア57に入力されるトルクによって回転駆動されるし、リングギア54は出力ギア57から当該リングギア54に入力されるトルクによって回転駆動される。
【0048】
また、第1発電電動機MG1は当該第1発電電動機MG1の回転角度に対応する出力値を出力するレゾルバ63を有する。このレゾルバ63は電子制御装置90のインターフェース95に接続されており、その出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいて第1発電電動機の回転数(以下この回転数を「第1MG回転数」という)を算出する。一方、第2発電電動機MG2は当該第2発電電動機の回転角度に対応する出力値を出力するレゾルバ64を有する。このレゾルバ64は電子制御装置90のインターフェース95に接続されており、その出力値は出90に入力される。電子制御装置90はこの出力値に基づいて第2発電電動機の回転数(以下この回転数を「第2MG回転数」という)を算出する。
【0049】
また、第1発電電動機MG1はインバータ70を介してバッテリ71に電気的に接続されている。したがって、第1発電電動機MG1が電力を発電しているときには、第1発電電動機MG1が発電した電力(以下この電力を「第1発電電力」という)はインバータ70を介してバッテリ71に供給可能である。また、第1発電電動機MG1はバッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第1発電電動機MG1に加えられる制御トルク(以下この制御トルクを「第1制御トルク」という)を制御することによってその回転数が制御可能に構成されている。
【0050】
また、第2発電電動機MG2はインバータ70を介してバッテリ71に電気的に接続されている。したがって、第2発電電動機MG2はバッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第2発電電動機MG2に加えられる制御トルク(以下この制御トルクを「第2制御トルク」という)を制御することによってその回転数が制御可能である。また、第2発電電動機MG2が電力を発電しているときには、第2発電電動機MG2が発電した電力(以下この電力を「第2発電電力」という)はインバータ70を介してバッテリ71に供給可能である。
【0051】
なお、第1発電電力は第2発電電動機MG2に直接供給可能でもあるし、第2発電電力は第1発電電動機に直接供給可能でもある。
【0052】
また、バッテリ71は電子制御装置90のインターフェース95に接続されている。そして、バッテリ蓄電量(すなわち、バッテリ71に蓄電されている電力量)は電子制御装置90のインターフェース95に入力される。また、インバータ70も電子制御装置90のインターフェース95に接続されている。そして、インターフェース95を介して電子制御装置90から送られる指令によってインバータ70から第2発電電動機MG2に供給される電力量および第1発電電動機MG1に供給される電力量が制御される。
【0053】
また、出力ギア57はギア列65を介してディファレンシャルギア66に接続されている。ディファレンシャルギア66はドライブシャフト67に取り付けられている。ドライブシャフト67の両端には駆動輪68が取り付けられている。したがって、出力ギア57からのトルクはギア列65、ディファレンシャルギア66、および、ドライブシャフト67を介して駆動輪68に伝達される。
【0054】
アクセルペダル踏込量センサ81は電子制御装置90のインターフェース95に電気的に接続されている。アクセルペダル踏込量センサ81はアクセルペダル80の踏込量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90はこの出力値に基づいてアクセルペダル80の踏込量、ひいては、動力装置に要求されている出力を算出する。なお、第1実施形態の動力装置は、概して、内燃機関10と第1発電電動機MG1と第2発電電動機MG2とから構成されている。
【0055】
次に、第1実施形態の制御装置による機関トルク、第1制御トルク、および、第2制御トルクの制御の一例について説明する。なお、以下の説明において「機関トルク」とは「内燃機関のクランクシャフトから出力されるトルク」であり、「機関動作点」とは「機関トルクと機関回転数とによって規定される内燃機関の動作点または内燃機関の動作状態」であり、「要求出力」とは「内燃機関のクランクシャフトから出力される出力として要求される出力」であり、「アクセル踏込量」とは「アクセルペダルの踏込量」であり、「車速」とは「ハイブリッド車両の走行速度」であり、「燃料噴射量」とは「燃料噴射弁から噴射される燃料の量」である。
【0056】
第1実施形態では、要求出力をクランクシャフトから出力させたときに燃費が最も高くなる機関動作点が要求出力毎に最適機関動作点として実験等によって予め求められる。そして、これら最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインが最適機関動作ラインとして求められる。斯くして求められた最適機関動作ラインが図3(A)に実線LOで示されているラインである。なお、図3(A)において、鎖線で示されているラインは同じ出力をクランクシャフトから出力されることができる機関動作点を結んだラインである。
【0057】
また、第1実施形態では、内燃機関の運転に起因して発生する振動および音のレベルが予め定められた許容範囲内のレベルとなる機関動作点が要求出力毎に許容機関動作点として実験等によって予め求められる。そして、これら許容機関動作点によって規定される領域を許容機関動作領域と称したとき、この許容機関動作領域の境界をなす機関動作点が境界許容機関動作点として求められる。そして、これら境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインが許容機関動作ラインとして求められる。斯くして求められた許容機関動作ラインが図3(A)に一点鎖線LPで示されているラインである。
【0058】
そして、許容機関動作点領域内にある最適機関動作ラインLOの部分と、許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する境界許容機関動作点によって形成される許容機関動作ラインLPの部分と、によって形成されるラインが確定機関動作ラインとして求められる。斯くして求められた確定機関動作ラインが図3(B)に実線LFで示されているラインである。そして、確定機関動作ラインLFに関するデータが電子制御装置90に記憶されている。
【0059】
そして、内燃機関の運転中、アクセル踏込量と車速とに基づいて要求出力が算出される。そして、この算出された要求出力を内燃機関から出力させることができる確定機関動作ラインLF上の機関動作点が選択される。そして、この選択された機関動作点を規定する機関トルクおよび機関回転数がそれぞれ目標機関トルクおよび目標機関回転数に設定される。そして、この設定された目標機関トルクおよび目標機関回転数が達成されるように燃料噴射量および機関回転数が制御される。
【0060】
ところで、第2MG回転数が一定である場合、第1MG回転数が変化すれば機関回転数も変化する。別の言い方をすれば、第1MG回転数を制御することによって機関回転数を制御することができる。そして、第1MG回転数を「NMG1」で表し、第2MG回転数を「NMG2」で表し、機関回転数を「NE」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、第1MG回転数と機関回転数との間には次式1の関係がある。
【0061】
NMG1=(NE−NMG2)/ρ+NE …(1)
【0062】
したがって、目標第1MG回転数を「TNMG1」で表し、目標機関回転数を「TNE」で表したとき、目標第1MG回転数と目標機関回転数との間には次式2の関係があることになる。
【0063】
TNMG1=(TNE−NMG2)/ρ+TNE …(2)
【0064】
そこで、第1実施形態では、要求出力に応じて選択される機関動作点に従って設定される目標機関回転数TNEと現在の第2MG回転数NMG2とを利用して上式2から目標第1MG回転数TNMG1が算出される。そして、斯くして算出された目標第1MG回転数TNMG1に対する現在の第1MG回転数NMG1の偏差(=TNMG1−NMG1)が算出される。そして、この算出された偏差が零になるように第1制御トルクが制御される。
【0065】
ところで、機関トルクを「TQE」で表し、リングギア(すなわち、駆動輪)に入力される機関トルク(以下この機関トルクを「リングギア入力機関トルク」という)を「TQEr」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、リングギア入力機関トルクと機関トルクとの間には次式3の関係がある。
【0066】
TQEr=1/(1+ρ)×TQE …(3)
【0067】
すなわち、リングギア入力機関トルクTQErは機関トルクTQEの一部である。したがって、リングギア入力機関トルクTQErは要求駆動トルク(すなわち、駆動輪68に入力されるべきトルク)よりも小さい。そこで、第1実施形態では、要求駆動トルクとリングギア入力機関トルクTQErとの差に相当するトルクが第2発電電動機からリングギアに入力されるように第2制御トルクが制御される。斯くして、要求駆動トルクに等しいトルクがリングギアに入力されることになる。
【0068】
なお、上記説明は、第1発電電動機が発電機として機能し、第2発電電動機が電電動機として機能している場合の説明である。しかしながら、ハイブリッド車両に要求される条件によっては第1発電電動機が電動機として機能したり、第2発電電動機が発電機として機能したり、第1発電電動機が発電機としても電動機としても機能しなかったり、第2発電電動機が発電機としても電動機としても機能しなかったりすることもある。また、第1実施形態では、内燃機関が運転されている。しかしながら、ハイブリッド車両に要求される条件によっては内燃機関が運転されないこともある。
【0069】
次に、第1実施形態の機関回転数の表示について説明する。第1実施形態では、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が最適機関動作点であり、この最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がそのままタコメータに表示される。
【0070】
一方、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が境界許容機関動作点であり、この境界許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がなまし処理によって補正され、斯くして補正された機関回転数がタコメータに表示される。
【0071】
なお、第1実施形態において機関回転数の補正に用いられるなまし処理は如何なる形態の処理であってもよく、たとえば、このなまし処理として、次式4に従った処理を採用することができる。なお、クランクポジションセンサの出力値に基づいた電子制御装置による機関回転数の算出は所定の演算サイクルでもって実行される。そして、式4において「Yn(k)」は「タコメータに表示させる機関回転数として今回算出される機関回転数」であり、「Xn」は「今回の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Yn(k−1)」は「1演算サイクルだけ前に式4によって算出された機関回転数」である。また、「A」は「なまし度合を決定する係数」であり、所望のなまし度合に応じて「0」よりも大きく「1」よりも小さい値に設定される。
【0072】
Yn(k)=A×Xn(k)+(1−A)×Yn(k−1) …(4)
【0073】
また、第1実施形態において機関回転数の補正に用いられるなまし処理として、次式5に従った処理を採用することもできる。なお、ここでも、クランクポジションセンサの出力値に基づいた電子制御装置による機関回転数の算出は所定の演算サイクルでもって実行される。そして、式5において「Yn(k)」は「タコメータに表示させる機関回転数として今回算出される機関回転数」であり、「Xn(k)」は「今回の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−1)」は「1演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−1)」は「2演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「Xn(k−n)」は「n演算サイクル前の電子制御装置による機関回転数の算出によって算出された機関回転数」であり、「n+1」は「式5の右辺において加算される機関回転数の数」である。
【0074】
Yn(k)=(Xn(k)+Xn(k−1)+Xn(k−2)+・・・+Xn(k−n))/(n+1) …(5)
【0075】
次に、第1実施形態の機関回転数の表示の利点について説明する。第1実施形態によれば、タコメータに表示された機関回転数を見た者(たとえば、ハイブリッド車両の運転者)に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、上述した構成を有する動力装置に関して上述したように内燃機関の動作が制御される場合において、要求出力に応じて選択される機関動作点が境界許容機関動作点であるときに要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「境界許容機関動作点の利用時の機関回転数変化率」と称し、要求出力に応じて選択される機関動作点が最適機関動作点であるときに要求出力の変化に伴って選択される最適機関動作点が変更され、斯くして変更される最適機関動作点に従って内燃機関が動作せしめられたときの単位機関出力変化量に対する機関回転数の変化量を「最適機関動作点の利用時の機関回転数変化率」と称したとき、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化率は、最適機関動作点の利用時の機関回転数変化率よりも大きい。したがって、このときに実際の機関回転数をそのままタコメータに表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0076】
しかしながら、第1実施形態では、単位要求出力変化量に対するタコメータに表示される機関回転数の変化量を「表示機関回転数変化率」と称したとき、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数をなまし処理によって補正することによって得られる機関回転数がタコメータによって表示される。実際の機関回転数をなまし処理によって補正することによって得られる機関回転数をタコメータに表示させた場合、表示機関回転数変化率が小さくなる。このため、第1実施形態によれば、タコメータに表示された機関回転数を見た者に上記違和感が生じることを抑制することができるのである。
【0077】
また、第1実施形態によれば、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができる。すなわち、上記違和感が生じることを抑制する手段として、たとえば、以下の手段を採用することもできる。すなわち、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときに単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせる程度の変化量になることが予測された場合、許容機関動作領域内の許容機関動作点のうち、単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を選択し、斯くして選択された許容機関動作点に従って内燃機関を動作させ、このときの実際の機関回転数をそのままタコメータに表示させるという手段を採用することができる。この手段によれば、実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量であることから、実際の機関回転数をそのままタコメータに表示させたとしても、上記違和感が生じることはない。
【0078】
ところが、許容機関動作点に従った内燃機関を動作させるとき、境界許容機関動作点に従って内燃機関を動作させた場合の燃費が最も高い。したがって、上述したように実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を許容機関動作領域から選択して同選択された許容機関動作点に従って内燃機関が動作せしめられた場合、同選択された許容機関動作点が境界許容機関動作点以外の許容機関動作点であったときにはそのときの燃費は境界許容機関動作点に従って内燃機関を動作させた場合の燃費に比べて低い。
【0079】
しかしながら、第1実施形態によれば、上記違和感が生じることを抑制するために境界許容機関動作点以外の許容機関動作点に従って内燃機関を動作させることはないことから、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができるのである。
【0080】
次に、第1実施形態の機関回転数の表示を実行するルーチンの一例について説明する。このルーチンの一例が図4に示されている。このルーチンは所定の演算サイクル毎に実行されるルーチンである。
【0081】
図4のルーチンが開始されると、始めに、ステップ100においてクランクポジションセンサの出力値に基づいて機関回転数NEが算出される。次いで、ステップ101において、最適機関動作点に従って内燃機関が動作せしめられているか否かが判別される。ここで、最適機関動作点に従って内燃機関が動作せしめられていると判別されたときには、ルーチンはステップ102に進む。一方、最適機関動作点に従って内燃機関が動作せしめられていない(すなわち、境界許容機関動作点に従って内燃機関が動作せしめられている)と判別されたときには、ルーチンはステップ103に進む。
【0082】
ステップ101において最適機関動作点に従って内燃機関が動作せしめられていると判別され、ルーチンがステップ102に進むと、ステップ100で算出された機関回転数NEがそのまま表示機関回転数(すなわち、タコメータによって表示されるべき機関回転数)NEiに入力され、ルーチンがステップ105に進む。
【0083】
ステップ101において最適機関動作点に従って内燃機関が動作せしめられていないと判別され、ルーチンがステップ103に進むと、ステップ100で算出された機関回転数NEが上式4に従ったなまし処理によって補正されることによって補正機関回転数NEaが算出される。次いで、ステップ104において、ステップ103で算出された補正機関回転数NEaが表示機関回転数NEiに入力され、ルーチンがステップ105に進む。
【0084】
ステップ105では、表示機関回転数NEiがタコメータによって表示される。ここで、ステップ101で最適機関動作点に従って内燃機関が動作せしめられていると判別されてルーチンがステップ102を経由してステップ105に進んだときには、ステップ100で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ101で最適機関動作点に従って内燃機関が動作せしめられていないと判別されてルーチンがステップ103およびステップ104を経由してステップ105に進んだときには、ステップ103で算出された補正機関回転数NEaがタコメータによって表示されることになる。
【0085】
次に、第2実施形態の動力装置の制御装置について説明する。なお、第2実施形態は機関回転数の表示に関してのみ第1実施形態とは異なる。したがって、以下、主に第2実施形態の機関回転数の表示について説明し、第1実施形態の構成を同じ第2実施形態の構成の説明は省略する。
【0086】
第2実施形態では、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が最適機関動作点であり、この最適機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数がそのままタコメータに表示される。
【0087】
一方、要求出力に応じて確定機関動作ライン上の機関動作点から選択された機関動作点が境界許容機関動作点であり、この境界許容機関動作点を規定する機関トルクおよび機関回転数が達成されるように内燃機関が動作せしめられているときには、タコメータによって表示される要求出力の変化に対する機関回転数の変化率が予め定められた変化率よりも小さくなるように(すなわち、要求出力の変化量に対する機関回転数の変化量が予め定められた変化量よりも小さくなるように)クランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数が補正され、斯くして補正された機関回転数がタコメータによって表示される。
【0088】
次に、第2実施形態の機関回転数の表示の利点について説明する。第2実施形態によれば、タコメータに表示された機関回転数を見た者(たとえば、ハイブリッド車両の運転者)に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることを抑制することができる。すなわち、第1実施形態に関連して説明したように、境界許容機関動作点とそれに従って内燃機関が動作せしめられたときの機関出力との間の関係の性質上、境界許容機関動作点の利用時の機関回転数変化率は、最適機関動作点の利用時の機関回転数変化率よりも大きい。したがって、このときに実際の機関回転数をそのままタコメータに表示させるとその表示を見た者に要求出力の変化量と機関回転数の変化量との間の関係に関して違和感が生じることになる。
【0089】
しかしながら、第2実施形態では、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられるときには実際の機関回転数を表示機関回転数変化率が予め定められた変化率よりも小さくなるようにクランクポジションセンサの出力値に基づいて電子制御装置によって算出される機関回転数を補正することによって得られる機関回転数をタコメータに表示させる。このため、第2実施形態によれば、タコメータに表示された機関回転数を見た者に上記違和感が生じることを抑制することができるのである。
【0090】
また、第2実施形態によれば、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができる。すなわち、第1実施形態に関連して説明したように、上記違和感が生じることを抑制する手段として、たとえば、要求出力の変化に伴って選択される境界許容機関動作点が変更され、斯くして変更される境界許容機関動作点に従って内燃機関が動作せしめられたときに単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせる程度の変化量になることが予測された場合、許容機関動作領域内の許容機関動作点のうち、単位要求出力変化量に対する実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を選択し、斯くして選択された許容機関動作点に従って内燃機関を動作させ、このときの実際の機関回転数をそのままタコメータに表示させるという手段を採用することができる。そして、この手段によれば、実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量であることから、実際の機関回転数をそのままタコメータに表示させたとしても、上記違和感が生じることはない。
【0091】
ところが、このように実際の機関回転数の変化量が上記違和感を生じさせない程度の変化量になる許容機関動作点を許容機関動作領域から選択して同選択された許容機関動作点に従って内燃機関が動作せしめられた場合、同選択された許容機関動作点が境界許容機関動作点以外の許容機関動作点であったときにはそのときの燃費は境界許容機関動作点に従って内燃機関を動作させた場合の燃費に比べて低い。
【0092】
しかしながら、第2実施形態によれば、上記違和感が生じることを抑制するために境界許容機関動作点以外の許容機関動作点に従って内燃機関を動作させることはないことから、上記違和感が生じることを抑制したとしても燃費を比較的高い状態に維持することができるのである。
【0093】
次に、第2実施形態の機関回転数の表示を実行するルーチンの一例について説明する。このルーチンの一例が図5に示されている。このルーチンは所定の演算サイクル毎に実行されるルーチンである。
【0094】
図5のルーチンが開始されると、始めに、ステップ200においてクランクポジションセンサの出力値に基づいて機関回転数NEが算出される。次いで、ステップ201において、最適機関動作点に従って内燃機関が動作せしめられているか否かが判別される。ここで、最適機関動作点に従って内燃機関が動作せしめられていると判別されたときには、ルーチンはステップ202に進む。一方、最適機関動作点に従って内燃機関が動作せしめられていない(すなわち、境界許容機関動作点に従って内燃機関が動作せしめられている)と判別されたときには、ルーチンはステップ203に進む。
【0095】
ステップ201において最適機関動作点に従って内燃機関が動作せしめられていると判別され、ルーチンがステップ202に進むと、ステップ200で算出された機関回転数NEがそのまま表示機関回転数(すなわち、タコメータによって表示されるべき機関回転数)NEiに入力され、ルーチンがステップ212に進む。
【0096】
ステップ201において最適機関動作点に従って内燃機関が動作せしめられていないと判別され、ルーチンがステップ203に進むと、現在の要求出力PEと前回の本ルーチンの実行時の要求出力PEiとが取得される。次いで、ステップ204において、ステップ203で取得された現在の要求出力PEと前回の本ルーチンの実行時の要求出力PEiとに基づいて前回の本ルーチンの実行時から現在までの要求出力の変化量ΔPE(=PE−PEi)が算出される。次いで、ステップ205において、前回の本ルーチンのステップ212でタコメータによって表示された表示機関回転数NEipが取得される。次いで、ステップ206においてステップ200で算出された機関回転数NEとステップ203で取得された表示機関回転数NEipとに基づいてステップ200で算出された機関回転数NEをステップ212においてタコメータに表示させた場合のタコメータによって表示された表示機関回転数の変化量ΔNEi(=NE−NEip)が算出される。次いで、ステップ207において、ステップ204で算出された要求出力の変化量ΔPEとステップ207で算出された表示機関回転数の変化量ΔNEiとに基づいて前回の本ルーチンの実行時から現在までの単位要求変化量に対する表示機関回転数の変化量(すなわち、表示機関回転数の変化率)Rne(=ΔNEi/ΔPE)が算出される。
【0097】
次いで、ステップ208において、ステップ207で算出された表示機関回転数の変化率Rneが予め定められた変化率Rneth以下である(Rne≦Rneth)か否かが判別される。ここで、Rne≦Rnethであると判別されたときには、ルーチンはステップ209に進む。一方、Rne≦Rnethではないと判別されたときには、ルーチンはステップ210に進む。
【0098】
ステップ208においてRne≦Rnethであると判別され、ルーチンがステップ209に進むと、ステップ200で算出された機関回転数NEがそのまま表示機関回転数NEiに入力され、ルーチンがステップ212に進む。
【0099】
ステップ208においてRne≦Rnethではないと判別され、ルーチンがステップ210に進むと、Rne≦Rneとなるようにステップ200で算出された機関回転数NEが補正されることによって補正機関回転数NEaが算出される。次いで、ステップ211において、ステップ210で算出された補正機関回転数NEaが表示機関回転数NEiに入力され、ルーチンがステップ212に進む。
【0100】
ステップ212では、表示機関回転数NEiがタコメータによって表示される。ここで、ステップ201で最適機関動作点に従って内燃機関が動作せしめられていると判別されてルーチンがステップ202を経由してステップ212に進んだときには、ステップ200で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ201で最適機関動作点に従って内燃機関が動作せしめられていないと判別され且つステップ208でRne≦Rnethであると判別されてルーチンがステップ209を経由してステップ212に進んだときにも、ステップ200で算出された機関回転数NEがタコメータによって表示されることになる。一方、ステップ201において最適機関動作点に従って内燃機関が動作せしめられていないと判別され且つステップ208でRne≦Rnethではないと判別されてルーチンがステップ210およびステップ211を経由してステップ212に進んだときには、ステップ210で算出された補正機関回転数NEaがタコメータによって表示されることになる。
【0101】
なお、上述した実施形態は、ハイブリッド車両の動力装置に本発明を適用した場合の実施形態である。しかしながら、本発明はハイブリッド車両の動力装置以外の動力装置にも適用可能であり、広くは、内燃機関と該内燃機関の出力軸に負荷を印加する負荷印加手段とを具備し、該負荷印加手段によって出力軸に印加される負荷を制御することによって機関回転数が制御される動力装置に適用可能である。
【0102】
また、上述した実施形態は、内燃機関の運転に起因して発生する振動および音のレベルが予め定められた許容範囲内のレベルとなる機関動作点が許容機関動作点である場合に本発明を適用した実施形態である。しかしながら、本発明はこうした機関動作点が許容機関動作点である場合以外の場合にも適用可能であり、たとえば、内燃機関から排出される排気ガスの性状(たとえば、いわゆる排気エミッション量)が予め定められた許容範囲内の性状となる機関動作点が許容機関動作点である場合にも適用可能である。したがって、本発明は、広くは、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点が許容機関動作点である場合に適用可能である。
【0103】
また、上述した実施形態は本発明を圧縮自着火式の内燃機関を具備する動力装置に適用した場合の実施形態であるが、本発明は火花点火式の内燃機関(いわゆるガソリンエンジン)を具備する動力装置にも適用可能である。
【符号の説明】
【0104】
10…内燃機関、21…燃料噴射弁、25…クランクシャフト(出力軸)、82…タコメータ、90…電子制御装置、MG1…第1発電電動機、MG2…第2発電電動機
【特許請求の範囲】
【請求項1】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、
要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御し、
一方、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項2】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、
要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御し、
一方、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【請求項3】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、
要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項4】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、
要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項5】
前記補正機関回転数が実際の機関回転数をなまし処理によって補正することによって得られる機関回転数である請求項2または4に記載の動力装置の制御装置。
【請求項6】
前記燃費以外の内燃機関に関する性能が内燃機関の運転に起因して発生する振動、または、内燃機関の運転に起因して発生する音、または、内燃機関の運転に起因して発生する振動と音とである請求項1〜5のいずれか1つに記載の動力装置の制御装置。
【請求項7】
前記負荷印加手段が前記出力軸から出力される出力によって電力を発生する機能を有する発電機である請求項1〜6のいずれか1つに記載の動力装置の制御装置。
【請求項8】
前記発電機が前記出力軸から出力される出力によって電力を発生する機能を有するとともに電力によって出力を出力する機能を有する発電電動機である請求項7に記載の動力装置の制御装置。
【請求項1】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、
要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御し、
一方、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項2】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称したとき、
要求出力に対応した最適機関動作点が前記許容機関動作領域内にある機関動作点であるときには同最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御し、
一方、要求出力に対応した最適機関動作点が前記許容機関動作領域内にないときには要求出力に対応した境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
機関回転数を表示する機関回転数表示手段を具備し、最適機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、境界許容機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御しているときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる。
【請求項3】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、
要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには実際の機関回転数をなまし処理によって補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項4】
燃焼室に燃料を供給する燃料供給手段と燃焼室における燃料の燃料によって生成される出力を出力する出力軸とを備えた内燃機関と、前記出力軸に負荷を印加する負荷印加手段と、を具備する動力装置の制御装置であって、
前記燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量を制御することによって前記出力軸から出力されるトルクである機関トルクを制御するとともに、前記負荷印加手段によって前記出力軸に印加される負荷である印加負荷を制御することによって前記出力軸の回転数である機関回転数を制御し、
機関トルクと機関回転数とによって規定される内燃機関の動作点を機関動作点と称し、前記出力軸から出力される出力として要求される出力を要求出力と称し、要求出力に対応する出力を前記出力軸から出力させたときに燃費が最も高くなる機関動作点を最適機関動作点と称し、該最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインを最適機関動作ラインと称し、燃費以外の内燃機関に関する性能が同性能に関して予め定められた許容範囲内の性能となる機関動作点を許容機関動作点と称し、該許容機関動作点によって規定される領域を許容機関動作領域と称し、該許容機関動作領域の境界をなす機関動作点を境界許容機関動作点と称し、該境界許容機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら境界許容機関動作点を結ぶことによって形成されるラインを許容機関動作ラインと称し、前記許容機関動作領域内にある最適機関動作ラインの部分と、前記許容機関動作領域内にない最適機関動作ライン上の最適機関動作点に対応する出力を出力する前記境界許容機関動作点によって形成される前記許容機関動作ラインの部分と、によって形成されるラインを確定機関動作ラインと称したとき、
要求出力を前記出力軸から出力させる機関動作点を前記確定機関動作ライン上から選択し、該選択された機関動作点を規定する機関トルクと機関回転数とが達成されるように燃料供給量と印加負荷とを制御する動力装置の制御装置において、
要求出力に対応して選択された機関動作点が前記最適機関動作ラインによって構成された前記確定機関動作ラインの部分上の最適機関動作点であるときには実際の機関回転数を前記機関回転数表示手段に表示させ、
一方、要求出力に対応して選択された機関動作点が前記許容機関動作ラインによって構成された前記確定機関動作ラインの部分上の境界許容機関動作点であるときには前記機関回転数表示手段によって表示される機関回転数の変化率が予め定められた変化率よりも小さくなるように実際の機関回転数を補正することによって得られる補正機関回転数を前記機関回転数表示手段に表示させる動力装置の制御装置。
【請求項5】
前記補正機関回転数が実際の機関回転数をなまし処理によって補正することによって得られる機関回転数である請求項2または4に記載の動力装置の制御装置。
【請求項6】
前記燃費以外の内燃機関に関する性能が内燃機関の運転に起因して発生する振動、または、内燃機関の運転に起因して発生する音、または、内燃機関の運転に起因して発生する振動と音とである請求項1〜5のいずれか1つに記載の動力装置の制御装置。
【請求項7】
前記負荷印加手段が前記出力軸から出力される出力によって電力を発生する機能を有する発電機である請求項1〜6のいずれか1つに記載の動力装置の制御装置。
【請求項8】
前記発電機が前記出力軸から出力される出力によって電力を発生する機能を有するとともに電力によって出力を出力する機能を有する発電電動機である請求項7に記載の動力装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−251449(P2012−251449A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−123069(P2011−123069)
【出願日】平成23年6月1日(2011.6.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月1日(2011.6.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]