
動力装置の制御装置
【課題】内燃機関を具備し、動力を出力する動力装置の制御装置に関する。
【解決手段】制御装置は機関停止中に要求動力が機関始動閾値以上になったときに機関運転を始動させ、機関運転中に要求動力が機関停止閾値以下になったときに機関運転を停止させる。内燃機関が触媒を具備し、触媒の浄化能力が始動閾値補正閾値よりも小さいときには基準機関始動閾値よりも小さい値が機関始動閾値に設定され、触媒の浄化能力が始動閾値補正閾値以上であるときには基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。
【解決手段】制御装置は機関停止中に要求動力が機関始動閾値以上になったときに機関運転を始動させ、機関運転中に要求動力が機関停止閾値以下になったときに機関運転を停止させる。内燃機関が触媒を具備し、触媒の浄化能力が始動閾値補正閾値よりも小さいときには基準機関始動閾値よりも小さい値が機関始動閾値に設定され、触媒の浄化能力が始動閾値補正閾値以上であるときには基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力装置の制御装置に関する。
【背景技術】
【0002】
燃焼室から排出される排気ガス中の成分を浄化する触媒を備えた内燃機関を具備する動力出力装置が特許文献1に記載されている。この動力出力装置は、内燃機関の運転(以下この運転を「機関運転」という)を始動させたり停止させたりする制御(以下この制御を「機関始動停止制御」という)を実行することができるように構成されている。そして、この動力出力装置は、機関始動停止制御の実行中において触媒の浄化率が或る所定値よりも高いときには機関運転を始動したり停止したりするが、機関始動停止制御の実行中において触媒の浄化率が上記所定値以下であるときには機関運転が既に始動されていれば当該機関運転の停止を禁止して当該機関運転を継続し、機関運転が停止されていれば機関運転を始動させたうえで当該機関運転の停止を禁止して当該機関運転を継続する。
【0003】
特許文献1に記載の動力出力装置が触媒の浄化率に応じて上記制御を実行する理由の1つは、触媒の浄化率の低下を抑制することによって触媒から流出する排気ガスのエミッションの低下を防止することにある。すなわち、機関運転を停止させるときには燃焼室への燃料の供給が停止されることから、燃焼室において燃焼は行われない。しかしながら、その一方で、燃焼室からガスは排出される。したがって、燃焼室への燃料の供給が停止されてから一定の期間が経過するまでの間、燃焼室からは酸素を多く含んだガスが排出され、そのガスが触媒に流入することになる。そして、こうした酸素を多く含んだガスが触媒に流入すると触媒が劣化する可能性がある。ここで、触媒の浄化率が比較的低くなっているときに触媒が劣化すれば、同触媒が浄化すべき成分を含んだ排気ガスが同触媒に流入したときに同成分を十分に浄化することができない。
【0004】
しかしながら、特許文献1に記載の動力出力装置では、触媒の浄化率が比較的低くなっているとき(すなわち、触媒の浄化率が上記所定値以下であるとき)に機関運転の停止が禁止されることから、酸素を多く含んだガスが触媒に流入することが抑制され、その結果、触媒の劣化が抑制される。このため、触媒から流出する排気ガスのエミッションの低下が防止される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−124827号公報
【特許文献2】特開2010−137605号公報
【特許文献3】特開2010−83232号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、触媒はその温度がいわゆる活性温度以上であるときに最も高い浄化能力を発揮する。したがって、触媒に排気ガスが流入しているときに触媒に高い浄化能力を発揮させるためには触媒の温度を活性温度以上に維持することが有効である。特許文献1に記載の動力出力装置では、触媒の温度が低く、その結果、触媒の浄化率が上記所定値よりも低いときに、機関運転が停止されていれば機関運転が始動され、機関運転が既に実行されていれば当該機関運転の停止が禁止されて当該機関運転が継続される。これによれば、触媒の温度が低いことに起因して触媒の浄化率が上記所定値よりも低い場合に、機関運転が実行され、比較的高温の排気ガスが触媒に流入することから、触媒の温度が上昇し、その結果、触媒の浄化率が高くなる。
【0007】
しかしながら、触媒の浄化率が上記所定値よりも低いときの特許文献1に記載の動力出力装置による機関運転の始動および当該機関運転の継続は、触媒の浄化率が上記所定値以上であるときには行われなかった始動および継続であることから、その分だけ、燃料を消費することになり、その結果、燃費が低下する。また、動力出力装置が車両に搭載され、該車両の運転者の要求に応じて動力出力装置が機関運転を始動したり停止したりするようになっている場合において、触媒の浄化率が上記所定値よりも低いときに動力出力装置が特許文献1に記載の動力出力装置のように機関運転の始動を行うと、運転者に違和感を与える可能性がある。
【0008】
そこで、本願の発明の目的は、燃費の低下を抑制するとともに運転者に違和感をあえたることを回避しつつ、触媒の浄化能力を高く維持することにある。
【課題を解決するための手段】
【0009】
本願の発明は、内燃機関を具備し、動力を出力する動力装置に関する。そして、本発明の制御装置では、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定される。そして、本発明の制御装置は、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる。
【0010】
ここで、本発明では、内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備する。そして、零よりも大きい出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零以上の出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関始動閾値を補正するか否かを決定するために用いられる零以上の閾値が始動閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記始動閾値補正閾値よりも小さいときには前記基準機関始動閾値よりも小さい値が前記機関始動閾値に設定され、前記触媒の浄化能力が前記始動閾値補正閾値以上であるときには前記基準機関始動閾値に等しい値または前記基準機関始動閾値よりも大きい値が前記機関始動閾値に設定され、前記触媒の浄化能力とは無関係に前記基準機関停止閾値に等しい値が前記機関停止閾値に設定される。
【0011】
なお、本発明において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関始動閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0012】
また、本発明において、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値が機関始動閾値に設定される場合において、同機関始動閾値は、基準機関始動閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値に設定される機関始動閾値は、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0013】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。これに対し、本発明では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。したがって、触媒の浄化能力が始動閾値補正閾値よりも小さいときの機関始動閾値は、触媒の浄化能力が始動閾値補正閾値以上であるときの機関始動閾値よりも小さい。このため、要求動力が増大し、内燃機関の運転を始動させる必要が生じたときの内燃機関の運転の始動は、触媒の浄化能力が始動閾値補正閾値以上であるときよりも、触媒の浄化能力が始動閾値補正閾値よりも小さいときのほうが早いことになる。そして、その結果、内燃機関の運転の継続時間が長くなる。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0014】
そして、要求動力が増大したときには、いずれにせよ、内燃機関の運転を始動させるのであるから、触媒の浄化能力が始動閾値補正閾値よりも小さいときの本発明に従った内燃機関の運転の始動は、いずれにせよ必要な内燃機関の運転の始動であり、不必要な内燃機関の運転の始動ではなく、また、運転者が意図した或いは運転者が想定した機関運転の始動である。このため、触媒の浄化能力が始動閾値補正閾値よりも小さいことに起因して内燃機関の運転を早期に始動させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避されることになる。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0015】
また、本願の別の発明では、上記発明において、前記基準機関停止閾値が零よりも大きい値であり、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定される。
【0016】
なお、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関停止閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、基準機関停止閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0017】
また、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定される場合において、同機関停止閾値は、基準機関停止閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値に設定される機関停止閾値は、たとえば、基準機関停止閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0018】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力をより高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。これに対し、本発明では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。これによれば、上述したように、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができる。
【0019】
さらに、本発明では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値または基準機関始動閾値よりも大きい値が機関停止閾値に設定される。これに対し、本発明では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。このため、要求動力が減少し、内燃機関の運転を停止させる必要が生じたときの内燃機関の運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、内燃機関の運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0020】
そして、要求動力が減少したときには、内燃機関の運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される本発明の内燃機関の運転は、既に実行されている内燃機関の運転を継続した結果の運転であり、不必要に内燃機関の運転を始動して実行された内燃機関の運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して内燃機関の運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避される。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力をより高く維持することができるのである。
【0021】
また、本願のさらに別の発明は、内燃機関を具備し、動力を出力する動力装置に関する。そして、本発明では、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定される。そして、本発明の制御装置は、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる。
【0022】
ここで、本発明では、内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備する。そして、零以上の出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零よりも大きい出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定され、前記触媒の浄化能力とは無関係に前記基準機関始動閾値に等しい値が前記機関始動閾値に設定される。
【0023】
なお、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関停止閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、基準機関停止閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0024】
また、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定される場合において、同機関停止閾値は、基準機関停止閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値に設定される機関停止閾値は、たとえば、基準機関停止閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0025】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値または基準機関停止閾値よりも大きい値が機関停止閾値に設定される。これに対し、本発明では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。したがって、触媒の浄化能力が停止閾値補正閾値よりも小さいときの機関停止閾値は、触媒の浄化能力が停止閾値補正閾値以上であるときの機関停止閾値よりも小さい。このため、要求動力が減少し、内燃機関の運転を停止させる必要が生じたときの内燃機関の運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、内燃機関の運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0026】
そして、要求動力が減少したときには、内燃機関の運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される本発明に従った内燃機関の運転は、既に実行されている内燃機関の運転を継続した結果の運転であり、不必要に内燃機関の運転を始動して実行された内燃機関の運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して内燃機関の運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避されることになる。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0027】
また、本願のさらに別の発明は、上記発明において、電動機をさらに具備し、要求動力が零よりも大きいときに当該動力装置から出力される動力の一部として前記電動機から出力される動力が利用される。
【0028】
また、本願のさらに別の発明は、上記発明において、前記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意される。そして、本発明では、前記触媒の浄化能力が前記機関停止許可閾値以下となった後に初めて始動された内燃機関の運転の実行中に前記触媒の浄化能力が前記機関停止許可閾値以下である間、要求動力が前記機関停止閾値以下であっても内燃機関の運転を継続させ、前記触媒の浄化能力が前記機関停止許可閾値よりも大きくなった後、要求動力が前記機関停止閾値以下になったときに内燃機関の運転が停止される。
【0029】
本発明には、内燃機関の運転の停止中に触媒の浄化能力が停止閾値補正閾値よりも小さい機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるという利点がある。すなわち、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下になった後に初めて始動された内燃機関の運転の実行中に要求動力が機関停止閾値以下になったときに常に内燃機関の運転が停止されると、触媒の浄化能力が機関停止許可閾値よりも大きくなる前に内燃機関の運転が停止される可能性がある。そして、この場合、触媒の浄化能力が機関停止許可閾値よりも大きくなるまでに比較的長い時間を要することになる。しかしながら、本発明では、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下になったとしても内燃機関の運転が継続される。こうしたことから、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるのである。
【図面の簡単な説明】
【0030】
【図1】第1実施形態の制御装置が適用された動力装置を具備するハイブリッド車両を示した図である。
【図2】第1実施形態の動力装置の内燃機関を示した図である。
【図3】第1実施形態の動力装置の制御を実行するルーチンの一例を示した図である。
【図4】第1実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図5】第2実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図6】第3実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図7】第4実施形態の動力装置の制御を実行するルーチンの一例を示した図である。
【図8】第4実施形態の機関運転継続フラグの設定を実行するルーチンの一例を示した図である。
【発明を実施するための形態】
【0031】
以下、本発明の第1実施形態について説明する。第1実施形態のハイブリッド車両が図1に示されている。図1において、MG1およびMG2は発電電動機(以下これら発電電動機をそれぞれ「第1発電電動機」および「第2発電電動機」という)、10は内燃機関、24はクランクポジションセンサ、50は動力分配機構、70はインバータ、71はバッテリ、80はアクセルペダル、81はアクセルペダル踏込量センサ、82はタコメータ、90は電子制御装置をそれぞれ示している。
【0032】
電子制御装置90は、マイクロコンピュータからなる。また、電子制御装置90は、CPU(マイクロプロセッサ)91、ROM(リードオンリメモリ)92、RAM(ランダムアクセスメモリ)93、バックアップRAM94、および、インターフェース95を有する。これらCPU91、ROM92、RAM93、バックアップRAM94、および、インターフェース95は、双方向バスによって互いに接続されている。
【0033】
図2に内燃機関10の詳細が示されている。図2に示されている内燃機関は、圧縮自着火式の内燃機関(いわゆるディーゼルエンジン)である。図2において、20は内燃機関10の本体、21は燃料噴射弁、22は燃料ポンプ、23は燃料供給通路、30は吸気通路、31は吸気マニホルド、32は吸気管、33はスロットル弁、34はインタークーラ、35はエアフローメータ、36はエアクリーナ、40は排気通路、41は排気マニホルド、42は排気管、43は触媒コンバータをそれぞれ示している。吸気通路30は、吸気マニホルド31と吸気管32とから構成されている。排気通路40は、排気マニホルド41と排気管42とから構成されている。
【0034】
燃料噴射弁21は、内燃機関の本体20に取り付けられている。燃料噴射弁21には、燃料供給通路23を介して燃料ポンプ22が接続されている。燃料ポンプ22は、燃料噴射弁21に燃料供給通路23を介して高圧の燃料を供給する。また、燃料噴射弁21は、電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、燃料噴射弁21に燃料を噴射させるための指令信号を燃料噴射弁21に供給する。また、燃料ポンプ22も電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、燃料ポンプ22から燃料噴射弁21に供給される燃料の圧力が予め定められた圧力に維持されるように燃料ポンプ22の作動を制御する制御信号を燃料ポンプ22に供給する。なお、燃料噴射弁21は、その燃料噴射孔が燃焼室内に露出するように内燃機関の本体20に取り付けられている。したがって、電子制御装置90から燃料噴射弁21に指令信号が供給されると、燃料噴射弁21は燃焼室内に燃料を直接噴射する。
【0035】
吸気マニホルド31はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている吸気ポート(図示せず)に接続されている。また、吸気マニホルド31は、その他端で吸気管32の一端に接続されている。排気マニホルド41はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている排気ポート(図示せず)に接続されている。また、排気マニホルド41は、その他端で排気管42の一端に接続されている。
【0036】
スロットル弁33は、吸気管32に配置されている。また、スロットル弁33の開度(以下この開度を「スロットル弁開度」という)が変更されると、スロットル弁33が配置された領域における吸気管32内の流路面積が変わる。これによってスロットル弁33を通過する空気の量が変わり、ひいては、燃焼室に吸入される空気の量が変わる。スロットル弁33には、その動作状態(すなわち、スロットル弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「スロットル弁アクチュエータ」という)が接続されている。スロットル弁アクチュエータは、電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、スロットル弁開度を目標スロットル弁開度に制御するようにスロットル弁アクチュエータを駆動するための制御信号をスロットル弁アクチュエータに供給する。
【0037】
インタークーラ34は、スロットル弁33よりも上流において吸気管32に配置されている。インタークーラ34は、そこに流入する空気を冷却する。
【0038】
内燃機関10は、燃焼室に吸入される空気と燃料噴射弁21から噴射される燃料とによって混合気を形成し、この混合気を圧縮することによって自着火させ、混合気中の燃料を燃焼させる。燃焼室において燃料が燃焼すると、クランクシャフト25にトルクが出力される。
【0039】
エアフローメータ35は、インタークーラ34よりも上流において吸気管32に配置されている。また、エアフローメータ35は、電子制御装置90のインターフェース95に電気的に接続されている。エアフローメータ35は、そこを通過する空気の量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいてエアフローメータ35を通過する空気の量、ひいては、燃焼室に吸入される空気の量を算出する。
【0040】
クランクポジションセンサ24は、内燃機関の出力軸25、すなわち、クランクシャフト25近傍に配置されている。また、クランクポジションセンサ24は、電子制御装置90のインターフェース95に電気的に接続されている。クランクポジションセンサ24は、クランクシャフト25の回転位相に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいて機関回転数(すなわち、内燃機関のクランクシャフト25の回転数)を算出する。
【0041】
触媒コンバータ43は、排気管42に配置されている。また、触媒コンバータ43は、その内部に触媒43aを有する。この触媒43は、燃焼室から排出される排気ガス中の特定の成分を浄化する作用を有する。この触媒43は、たとえば、排気ガス中の窒素酸化物(NOx)を浄化することができるいわゆるNOx触媒や、排気ガス中の窒素酸化物と一酸化炭素(CO)と未燃炭化水素(HC)とを比較的高い浄化率で同時に浄化することができるいわゆる三元触媒である。
【0042】
動力分配装置50は、遊星歯車装置51を有する。遊星歯車装置51は、サンギア52とプラネタリギア53とリングギア54とを有する。プラネタリギア53は、サンギア52に噛合せしめられているとともに、リングギア54に噛合せしめられている。サンギア52は、第1発電電動機MG1のシャフト(以下このシャフトを「第1シャフト」という)61に接続されている。したがって、第1発電電動機MG1は、サンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動可能であるし、サンギア52にトルクを出力可能である。そして、第1発電電動機MG1がサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動されることによって発電可能である。リングギア54は、リングギアキャリア56を介して第2発電電動機MG2のシャフト(以下このシャフトを「第2シャフト」という)62に接続されている。したがって、第2発電電動機MG2は、リングギア54にトルクを出力可能であるし、リングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動可能である。そして、第2発電電動機MG2がリングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動されることによって発電可能である。
【0043】
プラネタリギア53は、プラネタリギアキャリア55を介してクランクシャフト25に接続されている。したがって、プラネタリギア53は、クランクシャフト25から当該プラネタリギア53に入力されるトルクによって回転駆動せしめられる。また、プラネタリギア53は、サンギア52およびリングギア54に噛合されている。したがって、プラネタリギア53からサンギア52にトルクが入力されたときには、そのトルクによってサンギア52が回転駆動されるし、プラネタリギア53からリングギア54にトルクが入力されたときには、そのトルクによってリングギア54が回転駆動される。逆に、サンギア52からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動されるし、リングギア54からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動される。
【0044】
リングギア54は、リングギアキャリア56を介して出力ギア57に接続されている。したがって、出力ギア57は、リングギア54から当該出力ギア57に入力されるトルクによって回転駆動されるし、リングギア54は、出力ギア57から当該リングギア54に入力されるトルクによって回転駆動される。
【0045】
また、第1発電電動機MG1は、当該第1発電電動機MG1の回転角度に対応する出力値を出力するレゾルバ63を有する。このレゾルバ63は、電子制御装置90のインターフェース95に接続されており、その出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいて第1発電電動機の回転数(以下この回転数を「第1MG回転数」という)を算出する。一方、第2発電電動機MG2は、当該第2発電電動機の回転角度に対応する出力値を出力するレゾルバ64を有する。このレゾルバ64は、電子制御装置90のインターフェース95に接続されており、その出力値は出90に入力される。電子制御装置90は、この出力値に基づいて第2発電電動機の回転数(以下この回転数を「第2MG回転数」という)を算出する。
【0046】
また、第1発電電動機MG1は、インバータ70を介してバッテリ71に電気的に接続されている。したがって、第1発電電動機MG1が電力を発電しているときには、第1発電電動機MG1が発電した電力(以下この電力を「第1発電電力」という)は、インバータ70を介してバッテリ71に供給可能である。また、第1発電電動機MG1は、バッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第1発電電動機MG1に加えられる制御トルク(以下この制御トルクを「第1制御トルク」という)を制御することによってその回転数が制御可能に構成されている。
【0047】
また、第2発電電動機MG2は、インバータ70を介してバッテリ71に電気的に接続されている。したがって、第2発電電動機MG2は、バッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第2発電電動機MG2に加えられる制御トルク(以下この制御トルクを「第2制御トルク」という)を制御することによってその回転数が制御可能である。また、第2発電電動機MG2が電力を発電しているときには、第2発電電動機MG2が発電した電力(以下この電力を「第2発電電力」という)は、インバータ70を介してバッテリ71に供給可能である。
【0048】
なお、第1発電電力は、第2発電電動機MG2に直接供給可能でもあるし、第2発電電力は、第1発電電動機に直接供給可能でもある。
【0049】
また、バッテリ71は、電子制御装置90のインターフェース95に接続されている。そして、バッテリ蓄電量(すなわち、バッテリ71に蓄電されている電力量)は、電子制御装置90のインターフェース95に入力される。また、インバータ70も電子制御装置90のインターフェース95に接続されている。そして、インターフェース95を介して電子制御装置90から送られる指令によってインバータ70から第2発電電動機MG2に供給される電力量および第1発電電動機MG1に供給される電力量が制御される。
【0050】
また、出力ギア57は、ギア列65を介してディファレンシャルギア66に接続されている。ディファレンシャルギア66は、ドライブシャフト67に取り付けられている。ドライブシャフト67の両端には、駆動輪68が取り付けられている。したがって、出力ギア57からのトルクは、ギア列65、ディファレンシャルギア66、および、ドライブシャフト67を介して駆動輪68に伝達される。
【0051】
アクセルペダル踏込量センサ81は、電子制御装置90のインターフェース95に電気的に接続されている。アクセルペダル踏込量センサ81は、アクセルペダル80の踏込量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいてアクセルペダル80の踏込量、ひいては、動力装置に要求されている出力を算出する。なお、第1実施形態の動力装置は、概して、内燃機関10と第1発電電動機MG1と第2発電電動機MG2とから構成されている。
【0052】
次に、第1実施形態の動力装置の制御について説明する。なお、以下の説明において「出力動力」とは「動力装置から出力される動力」を意味し、「要求動力」とは「動力装置から出力ギアに出力されることが要求される出力動力」であり、「車速」とは「ハイブリッド車両の走行速度」であり、「機関運転」とは「内燃機関の運転」を意味し、「EVモード」とは「要求動力に相当する動力を出力ギアに出力するために第1発電電動機のみを駆動し、あるいは、第2発電電動機のみを駆動し、あるいは、第1発電電動機および第2発電電動機を駆動するモード」を意味し、「HVモード」とは「要求動力に相当する動力を出力ギアに出力するために第1発電電動機を駆動するとともに内燃機関を運転させ、あるいは、第2発電電動機を駆動するとともに内燃機関を運転させ、あるいは、第1発電電動機および第2発電電動機を駆動するとともに内燃機関を運転させるモード」を意味し、「EVモード制御」とは「EVモードに従った第1発電電動機の駆動、第2発電電動機の駆動、および、内燃機関の運転の制御」を意味し、「HVモード制御」とは「HVモードに従った第1発電電動機の駆動、第2発電電動機の駆動、および、内燃機関の運転の制御」を意味する。
【0053】
第1実施形態では、EVモードとHVモードとの2つのモードが用意されている。そして、機関運転を始動させるか否か(すなわち、HVモード制御を実行するか否か)を決定するために用いられる出力動力に関する閾値が機関始動閾値として設定される(この機関始動閾値の設定の詳細は後述する)。また、機関運転を停止させるか否か(すなわち、EVモード制御を実行するか否か)を決定するために用いられる出力動力に関する閾値が機関停止閾値として設定される(この機関始動閾値の設定の詳細は後述する)。
【0054】
そして、第1実施形態では、アクセルペダル踏込量と車速とに基づいて要求動力が算出される。そして、機関運転の停止中に要求動力が機関始動閾値以上になったときには、機関運転が始動される。つまり、EVモード制御の実行中に要求動力が機関始動閾値以上になったときには、HVモード制御が実行される。一方、機関運転の実行中に要求動力が機関停止閾値以下になったときには、機関運転が停止される。つまり、HVモード制御の実行中に要求動力が機関停止閾値以下になったときには、EVモード制御が実行される。
【0055】
次に、第1実施形態の機関始動閾値について説明する。第1実施形態では、機関始動閾値を設定するための基準となる零よりも大きい出力動力が基準機関始動閾値として予め用意されている。また、基準機関始動閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が始動閾値補正閾値として予め用意されている。
【0056】
そして、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0057】
一方、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0058】
次に、第1実施形態の機関停止閾値について説明する。第1実施形態では、機関停止閾値を設定するための基準となる零以上の出力動力が基準機関停止閾値として予め用意されている。
【0059】
そして、触媒の浄化能力とは無関係に基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0060】
なお、第1実施形態において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関始動閾値よりも小さい値であればよい。したがって、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ小さい値が機関始動閾値に設定されてもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど小さい値が機関始動閾値に設定されてもよいし(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど単調減少する値である)、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に小さい値が機関始動閾値に設定されてもよい(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に減少する値である)。
【0061】
また、第1実施形態では、アクセルペダル踏込量と車速とに基づいて要求動力が算出されるが、バッテリに充電されている電力量が許容量よりも少なくなったときに、バッテリに電力を供給するために第1発電電動機の発電駆動または第2発電電動機の発電駆動を行わせるために必要な動力をアクセルペダル踏込量と車速とに基づいて算出される要求動力に加算してもよい。
【0062】
また、第1実施形態において、触媒の浄化能力の代わりに、触媒の浄化能力に相当する別のパラメータを用いてもよい。こうしたパラメータとしては、たとえば、触媒によって浄化されるべき排気ガス中の成分を「特定成分」と称したとき、触媒に流入する排気ガス中の特定成分の量(または、割合)に対する触媒から流出する排気ガス中の特性成分の量(または、割合)に基づいて算出されるいわゆる浄化率を挙げることができる。
【0063】
また、第1実施形態において、触媒の浄化能力を取得する手法は、如何なる手法であってもよく、特定の手法に制限されない。したがって、触媒の浄化能力は、たとえば、触媒に流入する排気ガス中の特定成分の量(または、割合)に対する触媒から流出する排気ガス中の特性成分の量(または、割合)に基づいて取得されてもよいし、触媒の温度に基づいて取得されてもよいし、内燃機関の温度に基づいて取得されてもよい。
【0064】
なお、触媒の温度に基づいて触媒の浄化能力を取得する場合、触媒の温度を検出する温度センサを触媒に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の触媒の温度として用いてもよいし、内燃機関の運転状態に関する各種のパラメータ(たとえば、燃焼室に吸入された空気の量、または、その積算値、燃料噴射弁から噴射された燃料の量、または、その積算値など)から演算によって推定される触媒の温度を触媒浄化能力取得用の触媒の温度として用いてもよい。
【0065】
また、内燃機関の温度に基づいて触媒の浄化能力を取得する場合、内燃機関を冷却するための冷却水の温度を検出する温度センサを内燃機関に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、内燃機関の構成要素を潤滑するための潤滑油の温度を検出する温度センサを内燃機関に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、内燃機関の構成要素を潤滑するための潤滑油の圧力を検出する圧力センサを内燃機関に設け、当該圧力センサの出力値に対応する圧力に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、燃焼室内における燃焼圧を検出する圧力センサを内燃機関に設け、当該圧力センサの出力値に対応する圧力に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、発電電動機を潤滑する潤滑油の温度を検出する温度センサを発電電動機に設け、当該温度センサの出力値に対応する温度に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよい。
【0066】
また、第1実施形態では、触媒の浄化能力自体を用いて触媒の浄化能力が始動閾値補正閾値よりも小さいか否かに応じて機関始動閾値が設定される。しかしながら、触媒の浄化能力が始動閾値補正閾値よりも小さいか否かを推定し、触媒の浄化能力が始動閾値補正閾値よりも小さいと推定されたときに基準機関始動閾値よりも小さい値を機関始動閾値に設定し、触媒の浄化能力が始動閾値補正閾値以上であると推定されたときに基準機関始動閾値に等しい値を機関始動閾値に設定するようにしてもよい。
【0067】
なお、触媒の浄化能力が始動閾値補正閾値よりも小さいか否かを推定する場合、たとえば、比較的長期間に亘って機関運転が停止されていた後に初めて機関運転が始動されたときに触媒の浄化能力が始動閾値補正閾値よりも小さいと推定したり、比較的長期間に亘って機関運転が停止されていた後の予め定められた回数の機関運転の始動までは触媒の浄化能力が始動閾値補正閾値よりも小さいと推定したりすればよい。
【0068】
また、第1実施形態のHVモード制御における機関トルク、第1制御トルク、および、第2制御トルクの制御の一例を紹介すると、以下の通りである。なお、以下の説明において「機関トルク」とは「内燃機関のクランクシャフトから出力されるトルク」であり、「機関動作点」とは「機関トルクと機関回転数とによって規定される内燃機関の動作点または内燃機関の動作状態」であり、「要求出力」とは「内燃機関のクランクシャフトから出力される出力として要求される出力」であり、「アクセルペダル踏込量」とは「アクセルペダルの踏込量」であり、「燃料噴射量」とは「燃料噴射弁から噴射される燃料の量」である。
【0069】
第1実施形態では、要求出力をクランクシャフトから出力させたときに燃費が最も高くなる機関動作点が要求出力毎に最適機関動作点として実験等によって予め求められる。そして、これら最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインが最適機関動作ラインとして求められる。そして、この最適機関動作ラインが電子制御装置に記憶されている。
【0070】
そして、機関運転中、要求出力が算出され、この算出された要求出力を内燃機関から出力させることができる最適機関動作ライン上の機関動作点が選択される。そして、この選択された機関動作点を規定する機関トルクおよび機関回転数がそれぞれ目標機関トルクおよび目標機関回転数に設定される。そして、この設定された目標機関トルクおよび目標機関回転数が達成されるように燃料噴射量および機関回転数が制御される。
【0071】
ところで、第2MG回転数が一定である場合、第1MG回転数が変化すれば機関回転数も変化する。別の言い方をすれば、第1MG回転数を制御することによって機関回転数を制御することができる。そして、第1MG回転数を「NMG1」で表し、第2MG回転数を「NMG2」で表し、機関回転数を「NE」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、第1MG回転数と機関回転数との間には次式1の関係がある。したがって、目標第1MG回転数を「TNMG1」で表し、目標機関回転数を「TNE」で表したとき、目標第1MG回転数と目標機関回転数との間には次式2の関係があることになる。
【0072】
NMG1=(NE−NMG2)/ρ+NE …(1)
TNMG1=(TNE−NMG2)/ρ+TNE …(2)
【0073】
そこで、第1実施形態では、要求出力に応じて選択される機関動作点に従って設定される目標機関回転数TNEと現在の第2MG回転数NMG2とを利用して上式2から目標第1MG回転数TNMG1が算出される。そして、斯くして算出された目標第1MG回転数TNMG1に対する現在の第1MG回転数NMG1の偏差(=TNMG1−NMG1)が算出される。そして、この算出された偏差が零になるように第1制御トルクが制御される。
【0074】
ところで、機関トルクを「TQE」で表し、リングギア(すなわち、駆動輪)に入力される機関トルク(以下この機関トルクを「リングギア入力機関トルク」という)を「TQEr」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、リングギア入力機関トルクと機関トルクとの間には次式3の関係がある。
【0075】
TQEr=1/(1+ρ)×TQE …(3)
【0076】
すなわち、リングギア入力機関トルクTQErは機関トルクTQEの一部である。したがって、リングギア入力機関トルクTQErは要求駆動トルク(すなわち、駆動輪68に入力されるべきトルク)よりも小さい。そこで、第1実施形態では、要求駆動トルクとリングギア入力機関トルクTQErとの差に相当するトルクが第2発電電動機からリングギアに入力されるように第2制御トルクが制御される。斯くして、要求駆動トルクに等しいトルクがリングギアに入力されることになる。
【0077】
第1実施形態には、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、第1実施形態では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。これに対し、第1実施形態では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。したがって、触媒の浄化能力が始動閾値補正閾値よりも小さいときの機関始動閾値は、触媒の浄化能力が始動閾値補正閾値以上であるときの機関始動閾値よりも小さい。このため、要求動力が増大し、機関運転を始動させる必要が生じたときの機関運転の始動は、触媒の浄化能力が始動閾値補正閾値以上であるときよりも、触媒の浄化能力が始動閾値補正閾値よりも小さいときのほうが早いことになる。そして、その結果、機関運転の継続時間が長くなる。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0078】
そして、要求動力が増大したときには、いずれにせよ、機関運転を始動させるのであるから、触媒の浄化能力が始動閾値補正閾値よりも小さいときの第1実施形態に従った機関運転の始動自体は、いずれによせ必要な機関運転の始動であり、不必要な機関運転の始動ではなく、また、運転者が意図した或いは運転者が想定した機関運転の始動である。このため、触媒の浄化能力が始動閾値補正閾値よりも小さいことに起因して機関運転を早期に始動させたとしても、燃費の低下が抑制されており、且つ、運転者に違和感を与えることが回避されることになる。こうしたことから、第1実施形態によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0079】
なお、第1実施形態では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。しかしながら、これに代えて、触媒の浄化能力が始動閾値補正閾値以上であるときに、基準機関始動閾値よりも大きい値が機関始動閾値に設定されてもよい。これには、以下のような利点がある。すなわち、基準機関始動閾値よりも大きい値が機関始動閾値に設定されると、機関運転が始動されようとしたときに機関運転が実際に始動されるタイミングが遅くなる。これによれば、触媒の温度上昇の開始タイミングが遅くなる。しかしながら、触媒の浄化能力が始動閾値補正閾値以上である場合、触媒の浄化能力は比較的高いと言える。つまり、触媒の温度が活性温度に関して十分に高いと言える。この場合、機関運転が始動されようとしたときに機関運転が実際に始動されるタイミングが遅くされ、その結果、触媒の温度上昇の開始タイミングが遅くされたとしても、そもそも触媒の温度が十分に高いのであるから、触媒が十分に高い浄化能力を発揮することができる。一方、機関運転が実際に始動されるタイミングが遅くされれば、その分だけ、消費される燃料が少なくなるのであるから、燃費が高くなる。したがって、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値が機関始動閾値に設定されることによって、触媒に十分に高い浄化能力を発揮させつつ、燃費を高くすることができるという利点が得られる。
【0080】
なお、このように触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値を機関始動閾値に設定する場合、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ大きい値が機関始動閾値に設定されてもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど大きい値が機関始動閾値に設定されてもよいし(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど単調増加する値である)、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に大きい値が機関始動閾値に設定されてもよい(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に増大する値である)。
【0081】
次に、第1実施形態の動力装置の制御を実行するルーチンの一例について説明する。このルーチンの一例が図3に示されている。なお、図3のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0082】
図3のルーチンが開始されると、始めに、ステップ10において、要求動力Preqが取得される。次いで、ステップ11において、ステップ10で取得された要求動力Preqが零よりも大きい(Preq>0)か否かが判別される。ここで、Preq>0であると判別されたときには、ルーチンはステップ12に進む。一方、Preq>0ではないと判別されたときには、ルーチンはステップ17に進む。
【0083】
ステップ11においてPreq>0ではないと判別され、ルーチンがステップ17に進むと、第1発電電動機が動力駆動されている場合には、第1発電電動機の動力駆動が停止され、第1発電電動機の動力駆動が既に停止されている場合には、第1発電電動機の動力駆動の停止が継続され、第2発電電動機が動力駆動されている場合には、第2発電電動機の動力駆動が停止され、第2発電電動機の動力駆動が既に停止されている場合には、第2発電電動機の動力駆動の停止が継続される。次いで、ステップ18において、機関運転が実行されている場合には、機関運転が停止され、機関運転が既に停止されている場合には、機関運転の停止が継続される。次いで、ステップ19において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。なお、EVモード制御フラグFevは、EVモード制御が開始されたとき或いは動力装置からの動力の出力が終了したときにセットされ、HVモード制御が開始されたときにリセットされるフラグである。
【0084】
ステップ11においてPreq>0であると判別され、ルーチンがステップ12に進むと、要求動力に応じて第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が開始され、あるいは、第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が継続される。次いで、ステップ13において、EVモード制御フラグFevがセットされている(Fev=1)か否かが判別される。ステップ13において、Fev=1であると判別されたとき(すなわち、EVモード制御が実行されているとき、あるいは、動力装置からの動力の出力が停止された後に初めてルーチンがステップ13に到来したとき)には、ルーチンはステップ14に進む。一方、Fev=1ではない(すなわち、Fev=0である)と判別されたとき(すなわち、HVモード制御が実行されているとき)には、ルーチンはステップ20に進む。
【0085】
ステップ13においてFev=1であると判別され、ルーチンがステップ14に進むと、ステップ10で取得された要求動力が機関始動閾値Pst以上である(Preq≧Pst)か否かが判別される。ここで、Preq≧Pstであると判別されたときには、ルーチンはステップ15に進む。一方、Preq≧Pstではないと判別されたときには、ルーチンは終了する。
【0086】
ステップ14においてPreq≧Pstであると判別され、ルーチンがステップ15に進むと、機関運転が始動される。次いで、ステップ16において、EVモード制御フラグFevがリセットされ(Fev←0)、ルーチンが終了する。
【0087】
ステップ13においてFev=1ではないと判別され、ルーチンがステップ20に進むと、ステップ10で取得された要求動力Preqが機関停止閾値Psp以下である(Preq≦Psp)か否かが判別される。ここで、Preq≦Pspであると判別されたときには、ルーチンはステップ21に進む。一方、Preq≦Pspではないと判別されたときには、ルーチンは終了する。
【0088】
ステップ20においてPreq≦Pspであると判別され、ルーチンがステップ21に進むと、機関運転が停止される。次いで、ステップ22において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。
【0089】
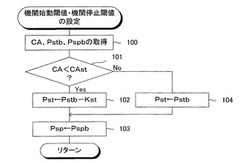
次に、第1実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図4に示されている。なお、図4のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0090】
図4のルーチンが開始されると、始めに、ステップ100において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ101において、ステップ100で取得された触媒の浄化能力CAが始動閾値補正閾値CAstよりも小さい(CA<CAst)か否かが判別される。ここで、CA<CAstであると判別されたときには、ルーチンはステップ102に進む。一方、CA<CAstではないと判別されたときには、ルーチンはステップ104に進む。
【0091】
ステップ101においてCA<CAstであると判別され、ルーチンがステップ102に進むと、ステップ100で取得された基準機関始動閾値Pstbから所定値Kstを減算して得られる値(Pstb−Kst)が機関始動閾値Pstに設定され、ルーチンがステップ103に進む。一方、ステップ101においてCA<CAstではないと判別され、ルーチンがステップ104に進むと、ステップ100で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンがステップ103に進む。ステップ103では、ステップ100で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンが終了する。
【0092】
次に、第2実施形態について説明する。なお、以下で説明されない第2実施形態の構成および制御は、第1実施形態の構成および制御と同じであるか、あるいは、第2実施形態の構成および制御に鑑みたときに第1実施形態の構成および制御から当然に導き出される構成および制御である。
【0093】
第2実施形態のハイブリッド車両の構成は、図1に示されている第1実施形態のハイブリッド車両の構成を同じである。そして、第2実施形態では、第1実施形態と同様に要求動力に応じてEVモード制御またはHVモード制御が実行される。
【0094】
次に、第2実施形態の機関始動閾値について説明する。第2実施形態では、機関始動閾値を設定するための基準となる零以上の出力動力が基準機関始動閾値として予め用意されている。そして、触媒の浄化能力とは無関係に基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0095】
次に、第2実施形態の機関停止閾値について説明する。第2実施形態では、機関停止閾値を設定するための基準となる零よりも大きい出力動力が基準機関停止閾値として予め用意されている。また、基準機関停止閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が停止閾値補正閾値として予め用意されている。
【0096】
そして、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0097】
一方、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0098】
なお、第2実施形態において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関停止閾値は、基準機関停止閾値よりも小さい値であればよい。したがって、たとえば、触媒の浄化能力とは無関係に基準機関停止閾値よりも一定の値だけ小さい値が機関停止閾値に設定されてもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値が機関停止閾値に設定されてもよいし(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値が機関停止閾値に設定されてもよい(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)。
【0099】
第2実施形態には、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、第2実施形態では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。これに対し、第2実施形態では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。したがって、触媒の浄化能力が停止閾値補正閾値よりも小さいときの機関停止閾値は、触媒の浄化能力が停止閾値補正閾値以上であるときの機関停止閾値よりも小さい。このため、要求動力が減少し、機関運転を停止させる必要が生じたときの機関運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、機関運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0100】
そして、要求動力が減少したときには、機関運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される第2実施形態に従った機関運転は、既に実行されている機関運転を継続した結果の運転であり、不必要に機関運転を始動して実行された機関運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して機関運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、運転者に違和感を与えることが回避されることになる。こうしたことから、第2実施形態によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0101】
なお、第2実施形態では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。しかしながら、これに代えて、触媒の浄化能力が停止閾値補正閾値以上であるときに、基準機関停止閾値よりも大きい値が機関停止閾値に設定されてもよい。これには、以下のような利点がある。すなわち、基準機関停止閾値よりも大きい値が機関停止閾値に設定されると、機関運転が停止されようとしたときに機関運転が実際に停止されるタイミングが早くなる。これによれば、触媒の温度上昇の終了タイミングが早くなる。しかしながら、触媒の浄化能力が停止閾値補正閾値以上である場合、触媒の浄化能力は比較的高いと言える。つまり、触媒の温度が活性温度に関して十分に高いと言える。この場合、機関運転が停止されようとしたときに機関運転が実際に停止されるタイミングが早くされ、その結果、触媒の温度上昇の終了タイミングが早くされたとしても、そもそも触媒の温度が十分に高いのであるから、触媒が十分に高い浄化能力を発揮することができる。一方、機関運転が実際に停止されるタイミングが早くされれば、その分だけ、消費される燃料が少なくなるのであるから、燃費が高くなる。したがって、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定されることによって、触媒に十分に高い浄化能力を発揮させつつ、燃費を高くすることができるという利点が得られる。
【0102】
なお、上述したように触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値を機関停止閾値に設定する場合、触媒の浄化能力とは無関係に基準機関停止閾値よりも一定の値だけ大きい値が機関停止閾値に設定されてもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値が機関停止閾値に設定されてもよいし(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値が機関停止閾値に設定されてもよい(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)。
【0103】
次に、第2実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図5に示されている。なお、図5のルーチンは、所定時間が経過する毎に実行されるルーチンである。また、第2実施形態の動力装置の制御を実行するルーチンとしては、図3に示されているルーチンを採用することができる。
【0104】
図5のルーチンが開始されると、始めに、ステップ200において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ201において、ステップ100で取得された触媒の浄化能力CAが停止閾値補正閾値CAspよりも小さい(CA<CAsp)か否かが判別される。ここで、CA<CAspであると判別されたときには、ルーチンはステップ202に進む。一方、CA<CAspではないと判別されたときには、ルーチンはステップ204に進む。
【0105】
ステップ201においてCA<CAspであると判別され、ルーチンがステップ202に進むと、ステップ100で取得された基準機関停止閾値Pspbから所定値Kspを減算して得られる値(Pspb−Ksp)が機関停止閾値Pspに設定され、ルーチンがステップ203に進む。一方、ステップ201においてCA<CAspではないと判別され、ルーチンがステップ204に進むと、ステップ200で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンがステップ203に進む。ステップ203では、ステップ200で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンが終了する。
【0106】
次に、第3実施形態について説明する。なお、以下で説明されない第3実施形態の構成および制御は、第1実施形態または第2実施形態の構成および制御と同じであるか、あるいは、第3実施形態の構成および制御に鑑みたときに第1実施形態または第2実施形態の構成および制御から当然に導き出される構成および制御である。
【0107】
第3実施形態のハイブリッド車両の構成は、図1に示されている第1実施形態のハイブリッド車両の構成と同じである。そして、第3実施形態では、第1実施形態と同様に要求動力に応じてEVモード制御またはHVモード制御が実行される。
【0108】
次に、第3実施形態の機関始動閾値について説明する。第3実施形態では、第1実施形態と同様に、機関始動閾値を設定するための基準となる零よりも大きい出力動力が基準機関始動閾値として予め用意されている。また、第1実施形態と同様に、基準機関始動閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が始動閾値補正閾値として予め用意されている。
【0109】
そして、第1実施形態と同様に、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0110】
一方、第1実施形態と同様に、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0111】
次に、第3実施形態の機関停止閾値について説明する。第3実施形態では、第2実施形態と同様に、機関停止閾値を設定するための基準となる零よりも大きい出力動力が基準機関停止閾値として予め用意されている。また、第2実施形態と同様に、基準機関停止閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が停止閾値補正閾値として予め用意されている。
【0112】
そして、第2実施形態と同様に、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0113】
一方、第2実施形態と同様に、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0114】
なお、第3実施形態において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、第1実施形態と同様に、基準機関始動閾値よりも小さい値であればよい。また、第3実施形態において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関停止閾値は、第2実施形態と同様に、基準機関停止閾値よりも小さい値であればよい。
【0115】
また、第3実施形態において、始動閾値補正閾値と停止閾値補正閾値とは互いに同じ値であってもよいし、互いに異なる値であってもよい。
【0116】
第3実施形態には、第1実施形態および第2実施形態に関連して説明した理由と同様な理由から、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。さらに、第3実施形態では、触媒の浄化能力が始動閾値補正閾値よりも小さいときに基準機関始動閾値よりも小さい値が機関始動閾値に設定されるとともに、触媒の浄化能力が停止閾値補正閾値よりも小さいときに基準機関停止閾値よりも小さい値が機関停止閾値に設定されることから、機関運転の始動が早まるとともに機関運転の停止が遅くなる。このため、第3実施形態によれば、第1実施形態および第2実施形態に比べて、燃費の低下をより確実に抑制するとともに、運転者に違和感を与えることをより確実に回避しつつ、触媒の浄化能力を高く維持することができるという効果がある。
【0117】
次に、第3実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図6に示されている。なお、図6のルーチンは、所定時間が経過する毎に実行されるルーチンである。また、第3実施形態の動力装置の制御を実行するルーチンとしては、図3に示されているルーチンを採用することができる。
【0118】
図6のルーチンが開始されると、始めに、ステップ300において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ301において、ステップ300で取得された触媒の浄化能力CAが始動閾値補正閾値CAstよりも小さい(CA<CAst)か否かが判別される。ここで、CA<CAstであると判別されたときには、ルーチンはステップ302に進む。一方、CA<CAstではないと判別されたときには、ルーチンはステップ304に進む。
【0119】
ステップ301においてCA<CAstであると判別され、ルーチンがステップ302に進むと、ステップ300で取得された基準機関始動閾値Pstbから所定値Kstを減算して得られる値(Pstb−Kst)が機関始動閾値Pstに設定され、ルーチンがステップ303に進む。一方、ステップ301においてCA<CAstではないと判別され、ルーチンがステップ305に進むと、ステップ300で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンがステップ303に進む。
【0120】
ステップ303では、ステップ300で取得された触媒の浄化能力CAが停止閾値補正閾値CAspよりも小さい(CA<CAsp)か否かが判別される。ここで、CA<CAspであると判別されたときには、ルーチンはステップ304に進む。一方、CA<CAspではないと判別されたときには、ルーチンはステップ306に進む。
【0121】
ステップ303においてCA<CAspであると判別され、ルーチンがステップ304に進むと、ステップ300で取得された基準機関停止閾値Pspbから所定値Kspを減算して得られる値(Pspb−Ksp)が機関停止閾値Pspに設定され、ルーチンが終了する。一方、ステップ303においてCA<CAspではないと判別され、ルーチンがステップ306に進むと、ステップ300で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンが終了する。
【0122】
次に、第4実施形態について説明する。なお、以下で説明されない第4実施形態の構成および制御は、第1実施形態の構成および制御と同じであるか、あるいは、第4実施形態の構成および制御に鑑みたときに第1実施形態の構成および制御から当然に導き出される構成および制御である。
【0123】
第4実施形態の動力装置の制御について説明する。第4実施形態では、上記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意される。
【0124】
そして、触媒の浄化能力が機関停止許可閾値以下となった後に初めて始動された機関運転の実行中(すなわち、HVモード制御の実行中)、触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下であっても機関運転の停止が禁止され、したがって、機関運転が継続される(別の言い方をすれば、HVモード制御の実行が継続される)。つまり、触媒の浄化能力が機関停止許可閾値以下となった後に初めて実行された機関運転の実行中、触媒の浄化能力が機関停止許可閾値以下である間は、要求動力に無関係に機関運転が継続される。
【0125】
そして、触媒の浄化能力が機関停止許可閾値よりも大きくなったときに機関運転の停止が許可される。したがって、触媒の浄化能力が機関停止許可閾値よりも大きくなった後に要求動力が機関停止閾値以下になったときには、機関運転が停止される(すなわち、EVモード制御が実行される)。なお、触媒の浄化能力が機関停止許可閾値よりも大きくなった後は、第1実施形態、または、第2実施形態、または、第3実施形態の動力装置の制御と同じ動力装置の制御が実行される。すなわち、触媒の浄化能力が機関停止許可閾値よりも大きくなった後は、要求動力に応じてEVモード制御またはHVおよび制御が実行される。
【0126】
なお、第4実施形態では、機関運転の停止を許可するか否かを決定するために触媒の浄化能力に関する閾値である機関停止許可閾値が用いられる。しかしながら、これに代えて、触媒の浄化能力が機関停止許可閾値以下となる蓋然性が高い機関運転の停止の継続時間を用いてもよい。この場合、たとえば、触媒の浄化能力が機関停止許可閾値以下となる蓋然性が高い機関運転の停止の継続時間が機関停止許可閾値として設定される。そして、機関運転の停止の継続時間が機関停止許可閾値以上となった後に初めて始動された機関運転の実行中、当該機関運転の始動時点から所定の時間が経過するまでの間、要求動力が機関停止閾値以下であっても当該機関運転の停止が禁止され、したがって、当該機関運転が継続される。そして、当該機関運転の始動時点から所定の時間が経過したときに機関運転の停止が許可される。したがって、当該機関運転の始動時点から所定の時間が経過した後に要求動力が機関停止閾値以下になったときには、機関運転が停止される。
【0127】
第4実施形態には、第1実施形態〜第3実施形態に関連して説明した利点に加えて、機関運転の停止中に触媒の浄化能力が停止閾値補正閾値よりも小さい機関停止許可閾値以下となったとき(すなわち、触媒の浄化能力が比較的大きく低下しているとき)に触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるという利点がある。すなわち、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下になった後に初めて始動された機関運転の実行中に要求動力が機関停止閾値以下になったときに常に機関運転が停止されると、触媒の浄化能力が機関停止許可閾値よりも大きくなる前に機関運転が停止される可能性がある。そして、この場合、触媒の浄化能力が機関停止許可閾値よりも大きくなるまでに比較的長い時間を要することになる。しかしながら、第4実施形態では、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下になったとしても機関運転が継続される。こうしたことから、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるのである。
【0128】
次に、第4実施形態の動力装置の制御を実行するルーチンの一例について説明する。このルーチンの一例が図7に示されている。なお、図7のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0129】
図7のルーチンが開始されると、始めに、ステップ40において、要求動力Preqが取得される。次いで、ステップ41において、ステップ40で取得された要求動力Preqが零よりも大きい(Preq>0)か否かが判別される。ここで、Preq>0であると判別されたときには、ルーチンはステップ42に進む。一方、Preq>0ではないと判別されたときには、ルーチンはステップ47に進む。
【0130】
ステップ41においてPreq>0ではないと判別され、ルーチンがステップ47に進むと、第1発電電動機が動力駆動されている場合には、第1発電電動機の動力駆動が停止され、第1発電電動機の動力駆動が既に停止されている場合には、第1発電電動機の動力駆動の停止が継続され、第2発電電動機が動力駆動されている場合には、第2発電電動機の動力駆動が停止され、第2発電電動機の動力駆動が既に停止されている場合には、第2発電電動機の動力駆動の停止が継続される。次いで、ステップ48において、機関運転が実行されている場合には、機関運転が停止され、機関運転が既に停止されている場合には、機関運転の停止が継続される。次いで、ステップ49において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。なお、EVモード制御フラグFevは、EVモード制御が開始されたとき或いは動力装置からの動力の出力が終了したときにセットされ、HVモード制御が開始されたときにリセットされるフラグである。
【0131】
ステップ41においてPreq>0であると判別され、ルーチンがステップ42に進むと、要求動力に応じて第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が開始され、あるいは、第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が継続される。次いで、ステップ43において、EVモード制御フラグFevがセットされている(Fev=1)か否かが判別される。ステップ43において、Fev=1であると判別されたとき(すなわち、EVモード制御が実行されているとき、あるいは、動力装置からの動力の出力が停止された後に初めてルーチンがステップ13に到来したとき)には、ルーチンはステップ44に進む。一方、Fev=1ではない(すなわち、Fev=0である)と判別されたとき(すなわち、HVモード制御が実行されているとき)には、ルーチンはステップ50Aに進む。
【0132】
ステップ43においてFev=1であると判別され、ルーチンがステップ44に進むと、ステップ40で取得された要求動力が機関始動閾値Pst以上である(Preq≧Pst)か否かが判別される。ここで、Preq≧Pstであると判別されたときには、ルーチンはステップ45に進む。一方、Preq≧Pstではないと判別されたときには、ルーチンは終了する。
【0133】
ステップ44においてPreq≧Pstであると判別され、ルーチンがステップ45に進むと、機関運転が始動される。次いで、ステップ46において、EVモード制御フラグFevがリセットされ(Fev←0)、ルーチンが終了する。
【0134】
ステップ43においてFev=1ではないと判別され、ルーチンがステップ50Aに進むと、機関運転継続フラグFinがリセットされている(Fin=0)か否かが判別される。機関運転継続フラグFinは、機関運転の停止を禁止して機関運転を継続すべきか否かを示すフラグであって、図8のステップ62でセットされ、図8のステップ63でリセットされるフラグである。ステップ50Aにおいて、Fin=0であると判別されたときには、ルーチンはステップ50に進む。一方、Fin=0ではないと判別されたときには、ルーチンは終了する。
【0135】
ステップ50AにおいてFin=0であると判別され、ルーチンがステップ50に進むと、ステップ40で取得された要求動力Preqが機関停止閾値Psp以下である(Preq≦Psp)か否かが判別される。ここで、Preq≦Pspであると判別されたときには、ルーチンはステップ51に進む。一方、Preq≦Pspではないと判別されたときには、ルーチンは終了する。
【0136】
ステップ50においてPreq≦Pspであると判別され、ルーチンがステップ51に進むと、機関運転が停止される。次いで、ステップ52において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。
【0137】
次に、図7のステップ50Aにおいて用いられる機関運転継続フラグの設定を実行するルーチンの一例について説明する。このルーチンの一例が図8に示されている。なお、このルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0138】
図8のルーチンが開始されると、始めに、ステップ60において、触媒の浄化能力CAが取得される。次いで、ステップ61において、ステップ60で取得された触媒の浄化能力CAが機関停止許可閾値CAin以下である(CA≦CAin)か否かが判別される。ここで、CA≦CAinであると判別されたときには、ルーチンはステップ62に進み、機関運転継続フラグFinがセットされ(Fin←1)、ルーチンが終了する。一方、CA≦CAinではないと判別されたときには、ルーチンはステップ63に進み、機関運転継続フラグFinがリセットされ(Fin←0)、ルーチンが終了する。
【0139】
なお、上述した実施形態の内燃機関は、圧縮自着火式の内燃機関であるが、本発明は、火花点火式の内燃機関(いわゆるガソリンエンジン)を具備する動力装置の制御装置にも適用可能である。
【符号の説明】
【0140】
10…内燃機関、MG1…第1発電電動機、MG2…第2発電電動機、21…燃料噴射弁、43…触媒コンバータ、43a…触媒、50…動力分配装置
【技術分野】
【0001】
本発明は、動力装置の制御装置に関する。
【背景技術】
【0002】
燃焼室から排出される排気ガス中の成分を浄化する触媒を備えた内燃機関を具備する動力出力装置が特許文献1に記載されている。この動力出力装置は、内燃機関の運転(以下この運転を「機関運転」という)を始動させたり停止させたりする制御(以下この制御を「機関始動停止制御」という)を実行することができるように構成されている。そして、この動力出力装置は、機関始動停止制御の実行中において触媒の浄化率が或る所定値よりも高いときには機関運転を始動したり停止したりするが、機関始動停止制御の実行中において触媒の浄化率が上記所定値以下であるときには機関運転が既に始動されていれば当該機関運転の停止を禁止して当該機関運転を継続し、機関運転が停止されていれば機関運転を始動させたうえで当該機関運転の停止を禁止して当該機関運転を継続する。
【0003】
特許文献1に記載の動力出力装置が触媒の浄化率に応じて上記制御を実行する理由の1つは、触媒の浄化率の低下を抑制することによって触媒から流出する排気ガスのエミッションの低下を防止することにある。すなわち、機関運転を停止させるときには燃焼室への燃料の供給が停止されることから、燃焼室において燃焼は行われない。しかしながら、その一方で、燃焼室からガスは排出される。したがって、燃焼室への燃料の供給が停止されてから一定の期間が経過するまでの間、燃焼室からは酸素を多く含んだガスが排出され、そのガスが触媒に流入することになる。そして、こうした酸素を多く含んだガスが触媒に流入すると触媒が劣化する可能性がある。ここで、触媒の浄化率が比較的低くなっているときに触媒が劣化すれば、同触媒が浄化すべき成分を含んだ排気ガスが同触媒に流入したときに同成分を十分に浄化することができない。
【0004】
しかしながら、特許文献1に記載の動力出力装置では、触媒の浄化率が比較的低くなっているとき(すなわち、触媒の浄化率が上記所定値以下であるとき)に機関運転の停止が禁止されることから、酸素を多く含んだガスが触媒に流入することが抑制され、その結果、触媒の劣化が抑制される。このため、触媒から流出する排気ガスのエミッションの低下が防止される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−124827号公報
【特許文献2】特開2010−137605号公報
【特許文献3】特開2010−83232号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、触媒はその温度がいわゆる活性温度以上であるときに最も高い浄化能力を発揮する。したがって、触媒に排気ガスが流入しているときに触媒に高い浄化能力を発揮させるためには触媒の温度を活性温度以上に維持することが有効である。特許文献1に記載の動力出力装置では、触媒の温度が低く、その結果、触媒の浄化率が上記所定値よりも低いときに、機関運転が停止されていれば機関運転が始動され、機関運転が既に実行されていれば当該機関運転の停止が禁止されて当該機関運転が継続される。これによれば、触媒の温度が低いことに起因して触媒の浄化率が上記所定値よりも低い場合に、機関運転が実行され、比較的高温の排気ガスが触媒に流入することから、触媒の温度が上昇し、その結果、触媒の浄化率が高くなる。
【0007】
しかしながら、触媒の浄化率が上記所定値よりも低いときの特許文献1に記載の動力出力装置による機関運転の始動および当該機関運転の継続は、触媒の浄化率が上記所定値以上であるときには行われなかった始動および継続であることから、その分だけ、燃料を消費することになり、その結果、燃費が低下する。また、動力出力装置が車両に搭載され、該車両の運転者の要求に応じて動力出力装置が機関運転を始動したり停止したりするようになっている場合において、触媒の浄化率が上記所定値よりも低いときに動力出力装置が特許文献1に記載の動力出力装置のように機関運転の始動を行うと、運転者に違和感を与える可能性がある。
【0008】
そこで、本願の発明の目的は、燃費の低下を抑制するとともに運転者に違和感をあえたることを回避しつつ、触媒の浄化能力を高く維持することにある。
【課題を解決するための手段】
【0009】
本願の発明は、内燃機関を具備し、動力を出力する動力装置に関する。そして、本発明の制御装置では、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定される。そして、本発明の制御装置は、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる。
【0010】
ここで、本発明では、内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備する。そして、零よりも大きい出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零以上の出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関始動閾値を補正するか否かを決定するために用いられる零以上の閾値が始動閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記始動閾値補正閾値よりも小さいときには前記基準機関始動閾値よりも小さい値が前記機関始動閾値に設定され、前記触媒の浄化能力が前記始動閾値補正閾値以上であるときには前記基準機関始動閾値に等しい値または前記基準機関始動閾値よりも大きい値が前記機関始動閾値に設定され、前記触媒の浄化能力とは無関係に前記基準機関停止閾値に等しい値が前記機関停止閾値に設定される。
【0011】
なお、本発明において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関始動閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0012】
また、本発明において、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値が機関始動閾値に設定される場合において、同機関始動閾値は、基準機関始動閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値に設定される機関始動閾値は、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0013】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。これに対し、本発明では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。したがって、触媒の浄化能力が始動閾値補正閾値よりも小さいときの機関始動閾値は、触媒の浄化能力が始動閾値補正閾値以上であるときの機関始動閾値よりも小さい。このため、要求動力が増大し、内燃機関の運転を始動させる必要が生じたときの内燃機関の運転の始動は、触媒の浄化能力が始動閾値補正閾値以上であるときよりも、触媒の浄化能力が始動閾値補正閾値よりも小さいときのほうが早いことになる。そして、その結果、内燃機関の運転の継続時間が長くなる。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0014】
そして、要求動力が増大したときには、いずれにせよ、内燃機関の運転を始動させるのであるから、触媒の浄化能力が始動閾値補正閾値よりも小さいときの本発明に従った内燃機関の運転の始動は、いずれにせよ必要な内燃機関の運転の始動であり、不必要な内燃機関の運転の始動ではなく、また、運転者が意図した或いは運転者が想定した機関運転の始動である。このため、触媒の浄化能力が始動閾値補正閾値よりも小さいことに起因して内燃機関の運転を早期に始動させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避されることになる。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0015】
また、本願の別の発明では、上記発明において、前記基準機関停止閾値が零よりも大きい値であり、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定される。
【0016】
なお、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関停止閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、基準機関停止閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0017】
また、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定される場合において、同機関停止閾値は、基準機関停止閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値に設定される機関停止閾値は、たとえば、基準機関停止閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0018】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力をより高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値または基準機関始動閾値よりも大きい値が機関始動閾値に設定される。これに対し、本発明では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。これによれば、上述したように、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができる。
【0019】
さらに、本発明では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値または基準機関始動閾値よりも大きい値が機関停止閾値に設定される。これに対し、本発明では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。このため、要求動力が減少し、内燃機関の運転を停止させる必要が生じたときの内燃機関の運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、内燃機関の運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0020】
そして、要求動力が減少したときには、内燃機関の運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される本発明の内燃機関の運転は、既に実行されている内燃機関の運転を継続した結果の運転であり、不必要に内燃機関の運転を始動して実行された内燃機関の運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して内燃機関の運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避される。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力をより高く維持することができるのである。
【0021】
また、本願のさらに別の発明は、内燃機関を具備し、動力を出力する動力装置に関する。そして、本発明では、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定される。そして、本発明の制御装置は、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる。
【0022】
ここで、本発明では、内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備する。そして、零以上の出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零よりも大きい出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意される。そして、前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定され、前記触媒の浄化能力とは無関係に前記基準機関始動閾値に等しい値が前記機関始動閾値に設定される。
【0023】
なお、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関停止閾値よりも小さい値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関始動閾値は、たとえば、基準機関停止閾値よりも一定の値だけ小さい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)であってもよい。
【0024】
また、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定される場合において、同機関停止閾値は、基準機関停止閾値以上の値であればよく、特定の値に制限されない。したがって、本発明において、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値に設定される機関停止閾値は、たとえば、基準機関停止閾値よりも一定の値だけ大きい値であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)であってもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値(つまり、この値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)であってもよい。
【0025】
本発明には、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、本発明では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値または基準機関停止閾値よりも大きい値が機関停止閾値に設定される。これに対し、本発明では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。したがって、触媒の浄化能力が停止閾値補正閾値よりも小さいときの機関停止閾値は、触媒の浄化能力が停止閾値補正閾値以上であるときの機関停止閾値よりも小さい。このため、要求動力が減少し、内燃機関の運転を停止させる必要が生じたときの内燃機関の運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、内燃機関の運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0026】
そして、要求動力が減少したときには、内燃機関の運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される本発明に従った内燃機関の運転は、既に実行されている内燃機関の運転を継続した結果の運転であり、不必要に内燃機関の運転を始動して実行された内燃機関の運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して内燃機関の運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、本発明の内燃機関が車両に搭載されている場合において該車両の運転者に違和感を与えることが回避されることになる。こうしたことから、本発明によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0027】
また、本願のさらに別の発明は、上記発明において、電動機をさらに具備し、要求動力が零よりも大きいときに当該動力装置から出力される動力の一部として前記電動機から出力される動力が利用される。
【0028】
また、本願のさらに別の発明は、上記発明において、前記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意される。そして、本発明では、前記触媒の浄化能力が前記機関停止許可閾値以下となった後に初めて始動された内燃機関の運転の実行中に前記触媒の浄化能力が前記機関停止許可閾値以下である間、要求動力が前記機関停止閾値以下であっても内燃機関の運転を継続させ、前記触媒の浄化能力が前記機関停止許可閾値よりも大きくなった後、要求動力が前記機関停止閾値以下になったときに内燃機関の運転が停止される。
【0029】
本発明には、内燃機関の運転の停止中に触媒の浄化能力が停止閾値補正閾値よりも小さい機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるという利点がある。すなわち、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下になった後に初めて始動された内燃機関の運転の実行中に要求動力が機関停止閾値以下になったときに常に内燃機関の運転が停止されると、触媒の浄化能力が機関停止許可閾値よりも大きくなる前に内燃機関の運転が停止される可能性がある。そして、この場合、触媒の浄化能力が機関停止許可閾値よりも大きくなるまでに比較的長い時間を要することになる。しかしながら、本発明では、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下になったとしても内燃機関の運転が継続される。こうしたことから、内燃機関の運転の停止中に触媒の浄化能力が機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるのである。
【図面の簡単な説明】
【0030】
【図1】第1実施形態の制御装置が適用された動力装置を具備するハイブリッド車両を示した図である。
【図2】第1実施形態の動力装置の内燃機関を示した図である。
【図3】第1実施形態の動力装置の制御を実行するルーチンの一例を示した図である。
【図4】第1実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図5】第2実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図6】第3実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例を示した図である。
【図7】第4実施形態の動力装置の制御を実行するルーチンの一例を示した図である。
【図8】第4実施形態の機関運転継続フラグの設定を実行するルーチンの一例を示した図である。
【発明を実施するための形態】
【0031】
以下、本発明の第1実施形態について説明する。第1実施形態のハイブリッド車両が図1に示されている。図1において、MG1およびMG2は発電電動機(以下これら発電電動機をそれぞれ「第1発電電動機」および「第2発電電動機」という)、10は内燃機関、24はクランクポジションセンサ、50は動力分配機構、70はインバータ、71はバッテリ、80はアクセルペダル、81はアクセルペダル踏込量センサ、82はタコメータ、90は電子制御装置をそれぞれ示している。
【0032】
電子制御装置90は、マイクロコンピュータからなる。また、電子制御装置90は、CPU(マイクロプロセッサ)91、ROM(リードオンリメモリ)92、RAM(ランダムアクセスメモリ)93、バックアップRAM94、および、インターフェース95を有する。これらCPU91、ROM92、RAM93、バックアップRAM94、および、インターフェース95は、双方向バスによって互いに接続されている。
【0033】
図2に内燃機関10の詳細が示されている。図2に示されている内燃機関は、圧縮自着火式の内燃機関(いわゆるディーゼルエンジン)である。図2において、20は内燃機関10の本体、21は燃料噴射弁、22は燃料ポンプ、23は燃料供給通路、30は吸気通路、31は吸気マニホルド、32は吸気管、33はスロットル弁、34はインタークーラ、35はエアフローメータ、36はエアクリーナ、40は排気通路、41は排気マニホルド、42は排気管、43は触媒コンバータをそれぞれ示している。吸気通路30は、吸気マニホルド31と吸気管32とから構成されている。排気通路40は、排気マニホルド41と排気管42とから構成されている。
【0034】
燃料噴射弁21は、内燃機関の本体20に取り付けられている。燃料噴射弁21には、燃料供給通路23を介して燃料ポンプ22が接続されている。燃料ポンプ22は、燃料噴射弁21に燃料供給通路23を介して高圧の燃料を供給する。また、燃料噴射弁21は、電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、燃料噴射弁21に燃料を噴射させるための指令信号を燃料噴射弁21に供給する。また、燃料ポンプ22も電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、燃料ポンプ22から燃料噴射弁21に供給される燃料の圧力が予め定められた圧力に維持されるように燃料ポンプ22の作動を制御する制御信号を燃料ポンプ22に供給する。なお、燃料噴射弁21は、その燃料噴射孔が燃焼室内に露出するように内燃機関の本体20に取り付けられている。したがって、電子制御装置90から燃料噴射弁21に指令信号が供給されると、燃料噴射弁21は燃焼室内に燃料を直接噴射する。
【0035】
吸気マニホルド31はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている吸気ポート(図示せず)に接続されている。また、吸気マニホルド31は、その他端で吸気管32の一端に接続されている。排気マニホルド41はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている排気ポート(図示せず)に接続されている。また、排気マニホルド41は、その他端で排気管42の一端に接続されている。
【0036】
スロットル弁33は、吸気管32に配置されている。また、スロットル弁33の開度(以下この開度を「スロットル弁開度」という)が変更されると、スロットル弁33が配置された領域における吸気管32内の流路面積が変わる。これによってスロットル弁33を通過する空気の量が変わり、ひいては、燃焼室に吸入される空気の量が変わる。スロットル弁33には、その動作状態(すなわち、スロットル弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「スロットル弁アクチュエータ」という)が接続されている。スロットル弁アクチュエータは、電子制御装置90のインターフェース95に電気的に接続されている。電子制御装置90は、スロットル弁開度を目標スロットル弁開度に制御するようにスロットル弁アクチュエータを駆動するための制御信号をスロットル弁アクチュエータに供給する。
【0037】
インタークーラ34は、スロットル弁33よりも上流において吸気管32に配置されている。インタークーラ34は、そこに流入する空気を冷却する。
【0038】
内燃機関10は、燃焼室に吸入される空気と燃料噴射弁21から噴射される燃料とによって混合気を形成し、この混合気を圧縮することによって自着火させ、混合気中の燃料を燃焼させる。燃焼室において燃料が燃焼すると、クランクシャフト25にトルクが出力される。
【0039】
エアフローメータ35は、インタークーラ34よりも上流において吸気管32に配置されている。また、エアフローメータ35は、電子制御装置90のインターフェース95に電気的に接続されている。エアフローメータ35は、そこを通過する空気の量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいてエアフローメータ35を通過する空気の量、ひいては、燃焼室に吸入される空気の量を算出する。
【0040】
クランクポジションセンサ24は、内燃機関の出力軸25、すなわち、クランクシャフト25近傍に配置されている。また、クランクポジションセンサ24は、電子制御装置90のインターフェース95に電気的に接続されている。クランクポジションセンサ24は、クランクシャフト25の回転位相に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいて機関回転数(すなわち、内燃機関のクランクシャフト25の回転数)を算出する。
【0041】
触媒コンバータ43は、排気管42に配置されている。また、触媒コンバータ43は、その内部に触媒43aを有する。この触媒43は、燃焼室から排出される排気ガス中の特定の成分を浄化する作用を有する。この触媒43は、たとえば、排気ガス中の窒素酸化物(NOx)を浄化することができるいわゆるNOx触媒や、排気ガス中の窒素酸化物と一酸化炭素(CO)と未燃炭化水素(HC)とを比較的高い浄化率で同時に浄化することができるいわゆる三元触媒である。
【0042】
動力分配装置50は、遊星歯車装置51を有する。遊星歯車装置51は、サンギア52とプラネタリギア53とリングギア54とを有する。プラネタリギア53は、サンギア52に噛合せしめられているとともに、リングギア54に噛合せしめられている。サンギア52は、第1発電電動機MG1のシャフト(以下このシャフトを「第1シャフト」という)61に接続されている。したがって、第1発電電動機MG1は、サンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動可能であるし、サンギア52にトルクを出力可能である。そして、第1発電電動機MG1がサンギア52から当該第1発電電動機MG1に入力されるトルクによって回転駆動されることによって発電可能である。リングギア54は、リングギアキャリア56を介して第2発電電動機MG2のシャフト(以下このシャフトを「第2シャフト」という)62に接続されている。したがって、第2発電電動機MG2は、リングギア54にトルクを出力可能であるし、リングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動可能である。そして、第2発電電動機MG2がリングギア54から当該第2発電電動機MG2に入力されるトルクによって回転駆動されることによって発電可能である。
【0043】
プラネタリギア53は、プラネタリギアキャリア55を介してクランクシャフト25に接続されている。したがって、プラネタリギア53は、クランクシャフト25から当該プラネタリギア53に入力されるトルクによって回転駆動せしめられる。また、プラネタリギア53は、サンギア52およびリングギア54に噛合されている。したがって、プラネタリギア53からサンギア52にトルクが入力されたときには、そのトルクによってサンギア52が回転駆動されるし、プラネタリギア53からリングギア54にトルクが入力されたときには、そのトルクによってリングギア54が回転駆動される。逆に、サンギア52からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動されるし、リングギア54からプラネタリギア53にトルクが入力されたときには、そのトルクによってプラネタリギア53が回転駆動される。
【0044】
リングギア54は、リングギアキャリア56を介して出力ギア57に接続されている。したがって、出力ギア57は、リングギア54から当該出力ギア57に入力されるトルクによって回転駆動されるし、リングギア54は、出力ギア57から当該リングギア54に入力されるトルクによって回転駆動される。
【0045】
また、第1発電電動機MG1は、当該第1発電電動機MG1の回転角度に対応する出力値を出力するレゾルバ63を有する。このレゾルバ63は、電子制御装置90のインターフェース95に接続されており、その出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいて第1発電電動機の回転数(以下この回転数を「第1MG回転数」という)を算出する。一方、第2発電電動機MG2は、当該第2発電電動機の回転角度に対応する出力値を出力するレゾルバ64を有する。このレゾルバ64は、電子制御装置90のインターフェース95に接続されており、その出力値は出90に入力される。電子制御装置90は、この出力値に基づいて第2発電電動機の回転数(以下この回転数を「第2MG回転数」という)を算出する。
【0046】
また、第1発電電動機MG1は、インバータ70を介してバッテリ71に電気的に接続されている。したがって、第1発電電動機MG1が電力を発電しているときには、第1発電電動機MG1が発電した電力(以下この電力を「第1発電電力」という)は、インバータ70を介してバッテリ71に供給可能である。また、第1発電電動機MG1は、バッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第1発電電動機MG1に加えられる制御トルク(以下この制御トルクを「第1制御トルク」という)を制御することによってその回転数が制御可能に構成されている。
【0047】
また、第2発電電動機MG2は、インバータ70を介してバッテリ71に電気的に接続されている。したがって、第2発電電動機MG2は、バッテリ71から供給される電力によって回転駆動可能であるし、バッテリ71から供給される電力によって当該第2発電電動機MG2に加えられる制御トルク(以下この制御トルクを「第2制御トルク」という)を制御することによってその回転数が制御可能である。また、第2発電電動機MG2が電力を発電しているときには、第2発電電動機MG2が発電した電力(以下この電力を「第2発電電力」という)は、インバータ70を介してバッテリ71に供給可能である。
【0048】
なお、第1発電電力は、第2発電電動機MG2に直接供給可能でもあるし、第2発電電力は、第1発電電動機に直接供給可能でもある。
【0049】
また、バッテリ71は、電子制御装置90のインターフェース95に接続されている。そして、バッテリ蓄電量(すなわち、バッテリ71に蓄電されている電力量)は、電子制御装置90のインターフェース95に入力される。また、インバータ70も電子制御装置90のインターフェース95に接続されている。そして、インターフェース95を介して電子制御装置90から送られる指令によってインバータ70から第2発電電動機MG2に供給される電力量および第1発電電動機MG1に供給される電力量が制御される。
【0050】
また、出力ギア57は、ギア列65を介してディファレンシャルギア66に接続されている。ディファレンシャルギア66は、ドライブシャフト67に取り付けられている。ドライブシャフト67の両端には、駆動輪68が取り付けられている。したがって、出力ギア57からのトルクは、ギア列65、ディファレンシャルギア66、および、ドライブシャフト67を介して駆動輪68に伝達される。
【0051】
アクセルペダル踏込量センサ81は、電子制御装置90のインターフェース95に電気的に接続されている。アクセルペダル踏込量センサ81は、アクセルペダル80の踏込量に対応する出力値を出力する。この出力値は電子制御装置90に入力される。電子制御装置90は、この出力値に基づいてアクセルペダル80の踏込量、ひいては、動力装置に要求されている出力を算出する。なお、第1実施形態の動力装置は、概して、内燃機関10と第1発電電動機MG1と第2発電電動機MG2とから構成されている。
【0052】
次に、第1実施形態の動力装置の制御について説明する。なお、以下の説明において「出力動力」とは「動力装置から出力される動力」を意味し、「要求動力」とは「動力装置から出力ギアに出力されることが要求される出力動力」であり、「車速」とは「ハイブリッド車両の走行速度」であり、「機関運転」とは「内燃機関の運転」を意味し、「EVモード」とは「要求動力に相当する動力を出力ギアに出力するために第1発電電動機のみを駆動し、あるいは、第2発電電動機のみを駆動し、あるいは、第1発電電動機および第2発電電動機を駆動するモード」を意味し、「HVモード」とは「要求動力に相当する動力を出力ギアに出力するために第1発電電動機を駆動するとともに内燃機関を運転させ、あるいは、第2発電電動機を駆動するとともに内燃機関を運転させ、あるいは、第1発電電動機および第2発電電動機を駆動するとともに内燃機関を運転させるモード」を意味し、「EVモード制御」とは「EVモードに従った第1発電電動機の駆動、第2発電電動機の駆動、および、内燃機関の運転の制御」を意味し、「HVモード制御」とは「HVモードに従った第1発電電動機の駆動、第2発電電動機の駆動、および、内燃機関の運転の制御」を意味する。
【0053】
第1実施形態では、EVモードとHVモードとの2つのモードが用意されている。そして、機関運転を始動させるか否か(すなわち、HVモード制御を実行するか否か)を決定するために用いられる出力動力に関する閾値が機関始動閾値として設定される(この機関始動閾値の設定の詳細は後述する)。また、機関運転を停止させるか否か(すなわち、EVモード制御を実行するか否か)を決定するために用いられる出力動力に関する閾値が機関停止閾値として設定される(この機関始動閾値の設定の詳細は後述する)。
【0054】
そして、第1実施形態では、アクセルペダル踏込量と車速とに基づいて要求動力が算出される。そして、機関運転の停止中に要求動力が機関始動閾値以上になったときには、機関運転が始動される。つまり、EVモード制御の実行中に要求動力が機関始動閾値以上になったときには、HVモード制御が実行される。一方、機関運転の実行中に要求動力が機関停止閾値以下になったときには、機関運転が停止される。つまり、HVモード制御の実行中に要求動力が機関停止閾値以下になったときには、EVモード制御が実行される。
【0055】
次に、第1実施形態の機関始動閾値について説明する。第1実施形態では、機関始動閾値を設定するための基準となる零よりも大きい出力動力が基準機関始動閾値として予め用意されている。また、基準機関始動閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が始動閾値補正閾値として予め用意されている。
【0056】
そして、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0057】
一方、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0058】
次に、第1実施形態の機関停止閾値について説明する。第1実施形態では、機関停止閾値を設定するための基準となる零以上の出力動力が基準機関停止閾値として予め用意されている。
【0059】
そして、触媒の浄化能力とは無関係に基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0060】
なお、第1実施形態において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、基準機関始動閾値よりも小さい値であればよい。したがって、たとえば、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ小さい値が機関始動閾値に設定されてもよいし、触媒の浄化能力が始動閾値補正閾値よりも小さいほど小さい値が機関始動閾値に設定されてもよいし(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど単調減少する値である)、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に小さい値が機関始動閾値に設定されてもよい(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも小さいほど段階的に減少する値である)。
【0061】
また、第1実施形態では、アクセルペダル踏込量と車速とに基づいて要求動力が算出されるが、バッテリに充電されている電力量が許容量よりも少なくなったときに、バッテリに電力を供給するために第1発電電動機の発電駆動または第2発電電動機の発電駆動を行わせるために必要な動力をアクセルペダル踏込量と車速とに基づいて算出される要求動力に加算してもよい。
【0062】
また、第1実施形態において、触媒の浄化能力の代わりに、触媒の浄化能力に相当する別のパラメータを用いてもよい。こうしたパラメータとしては、たとえば、触媒によって浄化されるべき排気ガス中の成分を「特定成分」と称したとき、触媒に流入する排気ガス中の特定成分の量(または、割合)に対する触媒から流出する排気ガス中の特性成分の量(または、割合)に基づいて算出されるいわゆる浄化率を挙げることができる。
【0063】
また、第1実施形態において、触媒の浄化能力を取得する手法は、如何なる手法であってもよく、特定の手法に制限されない。したがって、触媒の浄化能力は、たとえば、触媒に流入する排気ガス中の特定成分の量(または、割合)に対する触媒から流出する排気ガス中の特性成分の量(または、割合)に基づいて取得されてもよいし、触媒の温度に基づいて取得されてもよいし、内燃機関の温度に基づいて取得されてもよい。
【0064】
なお、触媒の温度に基づいて触媒の浄化能力を取得する場合、触媒の温度を検出する温度センサを触媒に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の触媒の温度として用いてもよいし、内燃機関の運転状態に関する各種のパラメータ(たとえば、燃焼室に吸入された空気の量、または、その積算値、燃料噴射弁から噴射された燃料の量、または、その積算値など)から演算によって推定される触媒の温度を触媒浄化能力取得用の触媒の温度として用いてもよい。
【0065】
また、内燃機関の温度に基づいて触媒の浄化能力を取得する場合、内燃機関を冷却するための冷却水の温度を検出する温度センサを内燃機関に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、内燃機関の構成要素を潤滑するための潤滑油の温度を検出する温度センサを内燃機関に設け、当該温度センサの出力値に対応する温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、内燃機関の構成要素を潤滑するための潤滑油の圧力を検出する圧力センサを内燃機関に設け、当該圧力センサの出力値に対応する圧力に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、燃焼室内における燃焼圧を検出する圧力センサを内燃機関に設け、当該圧力センサの出力値に対応する圧力に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよいし、発電電動機を潤滑する潤滑油の温度を検出する温度センサを発電電動機に設け、当該温度センサの出力値に対応する温度に基づいて推定される内燃機関の温度を触媒浄化能力取得用の内燃機関の温度として用いてもよい。
【0066】
また、第1実施形態では、触媒の浄化能力自体を用いて触媒の浄化能力が始動閾値補正閾値よりも小さいか否かに応じて機関始動閾値が設定される。しかしながら、触媒の浄化能力が始動閾値補正閾値よりも小さいか否かを推定し、触媒の浄化能力が始動閾値補正閾値よりも小さいと推定されたときに基準機関始動閾値よりも小さい値を機関始動閾値に設定し、触媒の浄化能力が始動閾値補正閾値以上であると推定されたときに基準機関始動閾値に等しい値を機関始動閾値に設定するようにしてもよい。
【0067】
なお、触媒の浄化能力が始動閾値補正閾値よりも小さいか否かを推定する場合、たとえば、比較的長期間に亘って機関運転が停止されていた後に初めて機関運転が始動されたときに触媒の浄化能力が始動閾値補正閾値よりも小さいと推定したり、比較的長期間に亘って機関運転が停止されていた後の予め定められた回数の機関運転の始動までは触媒の浄化能力が始動閾値補正閾値よりも小さいと推定したりすればよい。
【0068】
また、第1実施形態のHVモード制御における機関トルク、第1制御トルク、および、第2制御トルクの制御の一例を紹介すると、以下の通りである。なお、以下の説明において「機関トルク」とは「内燃機関のクランクシャフトから出力されるトルク」であり、「機関動作点」とは「機関トルクと機関回転数とによって規定される内燃機関の動作点または内燃機関の動作状態」であり、「要求出力」とは「内燃機関のクランクシャフトから出力される出力として要求される出力」であり、「アクセルペダル踏込量」とは「アクセルペダルの踏込量」であり、「燃料噴射量」とは「燃料噴射弁から噴射される燃料の量」である。
【0069】
第1実施形態では、要求出力をクランクシャフトから出力させたときに燃費が最も高くなる機関動作点が要求出力毎に最適機関動作点として実験等によって予め求められる。そして、これら最適機関動作点を機関トルクと機関回転数とによって規定されるグラフ上にプロットしてこれら最適機関動作点を結ぶことによって形成されるラインが最適機関動作ラインとして求められる。そして、この最適機関動作ラインが電子制御装置に記憶されている。
【0070】
そして、機関運転中、要求出力が算出され、この算出された要求出力を内燃機関から出力させることができる最適機関動作ライン上の機関動作点が選択される。そして、この選択された機関動作点を規定する機関トルクおよび機関回転数がそれぞれ目標機関トルクおよび目標機関回転数に設定される。そして、この設定された目標機関トルクおよび目標機関回転数が達成されるように燃料噴射量および機関回転数が制御される。
【0071】
ところで、第2MG回転数が一定である場合、第1MG回転数が変化すれば機関回転数も変化する。別の言い方をすれば、第1MG回転数を制御することによって機関回転数を制御することができる。そして、第1MG回転数を「NMG1」で表し、第2MG回転数を「NMG2」で表し、機関回転数を「NE」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、第1MG回転数と機関回転数との間には次式1の関係がある。したがって、目標第1MG回転数を「TNMG1」で表し、目標機関回転数を「TNE」で表したとき、目標第1MG回転数と目標機関回転数との間には次式2の関係があることになる。
【0072】
NMG1=(NE−NMG2)/ρ+NE …(1)
TNMG1=(TNE−NMG2)/ρ+TNE …(2)
【0073】
そこで、第1実施形態では、要求出力に応じて選択される機関動作点に従って設定される目標機関回転数TNEと現在の第2MG回転数NMG2とを利用して上式2から目標第1MG回転数TNMG1が算出される。そして、斯くして算出された目標第1MG回転数TNMG1に対する現在の第1MG回転数NMG1の偏差(=TNMG1−NMG1)が算出される。そして、この算出された偏差が零になるように第1制御トルクが制御される。
【0074】
ところで、機関トルクを「TQE」で表し、リングギア(すなわち、駆動輪)に入力される機関トルク(以下この機関トルクを「リングギア入力機関トルク」という)を「TQEr」で表し、リングギアの歯数に対するサンギアの歯数の比(すなわち、サンギアの歯数/リングギアの歯数)を「ρ」で表したとき、リングギア入力機関トルクと機関トルクとの間には次式3の関係がある。
【0075】
TQEr=1/(1+ρ)×TQE …(3)
【0076】
すなわち、リングギア入力機関トルクTQErは機関トルクTQEの一部である。したがって、リングギア入力機関トルクTQErは要求駆動トルク(すなわち、駆動輪68に入力されるべきトルク)よりも小さい。そこで、第1実施形態では、要求駆動トルクとリングギア入力機関トルクTQErとの差に相当するトルクが第2発電電動機からリングギアに入力されるように第2制御トルクが制御される。斯くして、要求駆動トルクに等しいトルクがリングギアに入力されることになる。
【0077】
第1実施形態には、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、第1実施形態では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。これに対し、第1実施形態では、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。したがって、触媒の浄化能力が始動閾値補正閾値よりも小さいときの機関始動閾値は、触媒の浄化能力が始動閾値補正閾値以上であるときの機関始動閾値よりも小さい。このため、要求動力が増大し、機関運転を始動させる必要が生じたときの機関運転の始動は、触媒の浄化能力が始動閾値補正閾値以上であるときよりも、触媒の浄化能力が始動閾値補正閾値よりも小さいときのほうが早いことになる。そして、その結果、機関運転の継続時間が長くなる。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0078】
そして、要求動力が増大したときには、いずれにせよ、機関運転を始動させるのであるから、触媒の浄化能力が始動閾値補正閾値よりも小さいときの第1実施形態に従った機関運転の始動自体は、いずれによせ必要な機関運転の始動であり、不必要な機関運転の始動ではなく、また、運転者が意図した或いは運転者が想定した機関運転の始動である。このため、触媒の浄化能力が始動閾値補正閾値よりも小さいことに起因して機関運転を早期に始動させたとしても、燃費の低下が抑制されており、且つ、運転者に違和感を与えることが回避されることになる。こうしたことから、第1実施形態によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0079】
なお、第1実施形態では、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。しかしながら、これに代えて、触媒の浄化能力が始動閾値補正閾値以上であるときに、基準機関始動閾値よりも大きい値が機関始動閾値に設定されてもよい。これには、以下のような利点がある。すなわち、基準機関始動閾値よりも大きい値が機関始動閾値に設定されると、機関運転が始動されようとしたときに機関運転が実際に始動されるタイミングが遅くなる。これによれば、触媒の温度上昇の開始タイミングが遅くなる。しかしながら、触媒の浄化能力が始動閾値補正閾値以上である場合、触媒の浄化能力は比較的高いと言える。つまり、触媒の温度が活性温度に関して十分に高いと言える。この場合、機関運転が始動されようとしたときに機関運転が実際に始動されるタイミングが遅くされ、その結果、触媒の温度上昇の開始タイミングが遅くされたとしても、そもそも触媒の温度が十分に高いのであるから、触媒が十分に高い浄化能力を発揮することができる。一方、機関運転が実際に始動されるタイミングが遅くされれば、その分だけ、消費される燃料が少なくなるのであるから、燃費が高くなる。したがって、触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値が機関始動閾値に設定されることによって、触媒に十分に高い浄化能力を発揮させつつ、燃費を高くすることができるという利点が得られる。
【0080】
なお、このように触媒の浄化能力が始動閾値補正閾値以上であるときに基準機関始動閾値よりも大きい値を機関始動閾値に設定する場合、触媒の浄化能力とは無関係に基準機関始動閾値よりも一定の値だけ大きい値が機関始動閾値に設定されてもよいし、触媒の浄化能力が始動閾値補正閾値よりも大きいほど大きい値が機関始動閾値に設定されてもよいし(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど単調増加する値である)、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に大きい値が機関始動閾値に設定されてもよい(この場合、設定される機関始動閾値は、触媒の浄化能力が始動閾値補正閾値よりも大きいほど段階的に増大する値である)。
【0081】
次に、第1実施形態の動力装置の制御を実行するルーチンの一例について説明する。このルーチンの一例が図3に示されている。なお、図3のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0082】
図3のルーチンが開始されると、始めに、ステップ10において、要求動力Preqが取得される。次いで、ステップ11において、ステップ10で取得された要求動力Preqが零よりも大きい(Preq>0)か否かが判別される。ここで、Preq>0であると判別されたときには、ルーチンはステップ12に進む。一方、Preq>0ではないと判別されたときには、ルーチンはステップ17に進む。
【0083】
ステップ11においてPreq>0ではないと判別され、ルーチンがステップ17に進むと、第1発電電動機が動力駆動されている場合には、第1発電電動機の動力駆動が停止され、第1発電電動機の動力駆動が既に停止されている場合には、第1発電電動機の動力駆動の停止が継続され、第2発電電動機が動力駆動されている場合には、第2発電電動機の動力駆動が停止され、第2発電電動機の動力駆動が既に停止されている場合には、第2発電電動機の動力駆動の停止が継続される。次いで、ステップ18において、機関運転が実行されている場合には、機関運転が停止され、機関運転が既に停止されている場合には、機関運転の停止が継続される。次いで、ステップ19において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。なお、EVモード制御フラグFevは、EVモード制御が開始されたとき或いは動力装置からの動力の出力が終了したときにセットされ、HVモード制御が開始されたときにリセットされるフラグである。
【0084】
ステップ11においてPreq>0であると判別され、ルーチンがステップ12に進むと、要求動力に応じて第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が開始され、あるいは、第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が継続される。次いで、ステップ13において、EVモード制御フラグFevがセットされている(Fev=1)か否かが判別される。ステップ13において、Fev=1であると判別されたとき(すなわち、EVモード制御が実行されているとき、あるいは、動力装置からの動力の出力が停止された後に初めてルーチンがステップ13に到来したとき)には、ルーチンはステップ14に進む。一方、Fev=1ではない(すなわち、Fev=0である)と判別されたとき(すなわち、HVモード制御が実行されているとき)には、ルーチンはステップ20に進む。
【0085】
ステップ13においてFev=1であると判別され、ルーチンがステップ14に進むと、ステップ10で取得された要求動力が機関始動閾値Pst以上である(Preq≧Pst)か否かが判別される。ここで、Preq≧Pstであると判別されたときには、ルーチンはステップ15に進む。一方、Preq≧Pstではないと判別されたときには、ルーチンは終了する。
【0086】
ステップ14においてPreq≧Pstであると判別され、ルーチンがステップ15に進むと、機関運転が始動される。次いで、ステップ16において、EVモード制御フラグFevがリセットされ(Fev←0)、ルーチンが終了する。
【0087】
ステップ13においてFev=1ではないと判別され、ルーチンがステップ20に進むと、ステップ10で取得された要求動力Preqが機関停止閾値Psp以下である(Preq≦Psp)か否かが判別される。ここで、Preq≦Pspであると判別されたときには、ルーチンはステップ21に進む。一方、Preq≦Pspではないと判別されたときには、ルーチンは終了する。
【0088】
ステップ20においてPreq≦Pspであると判別され、ルーチンがステップ21に進むと、機関運転が停止される。次いで、ステップ22において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。
【0089】
次に、第1実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図4に示されている。なお、図4のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0090】
図4のルーチンが開始されると、始めに、ステップ100において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ101において、ステップ100で取得された触媒の浄化能力CAが始動閾値補正閾値CAstよりも小さい(CA<CAst)か否かが判別される。ここで、CA<CAstであると判別されたときには、ルーチンはステップ102に進む。一方、CA<CAstではないと判別されたときには、ルーチンはステップ104に進む。
【0091】
ステップ101においてCA<CAstであると判別され、ルーチンがステップ102に進むと、ステップ100で取得された基準機関始動閾値Pstbから所定値Kstを減算して得られる値(Pstb−Kst)が機関始動閾値Pstに設定され、ルーチンがステップ103に進む。一方、ステップ101においてCA<CAstではないと判別され、ルーチンがステップ104に進むと、ステップ100で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンがステップ103に進む。ステップ103では、ステップ100で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンが終了する。
【0092】
次に、第2実施形態について説明する。なお、以下で説明されない第2実施形態の構成および制御は、第1実施形態の構成および制御と同じであるか、あるいは、第2実施形態の構成および制御に鑑みたときに第1実施形態の構成および制御から当然に導き出される構成および制御である。
【0093】
第2実施形態のハイブリッド車両の構成は、図1に示されている第1実施形態のハイブリッド車両の構成を同じである。そして、第2実施形態では、第1実施形態と同様に要求動力に応じてEVモード制御またはHVモード制御が実行される。
【0094】
次に、第2実施形態の機関始動閾値について説明する。第2実施形態では、機関始動閾値を設定するための基準となる零以上の出力動力が基準機関始動閾値として予め用意されている。そして、触媒の浄化能力とは無関係に基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0095】
次に、第2実施形態の機関停止閾値について説明する。第2実施形態では、機関停止閾値を設定するための基準となる零よりも大きい出力動力が基準機関停止閾値として予め用意されている。また、基準機関停止閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が停止閾値補正閾値として予め用意されている。
【0096】
そして、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0097】
一方、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0098】
なお、第2実施形態において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関停止閾値は、基準機関停止閾値よりも小さい値であればよい。したがって、たとえば、触媒の浄化能力とは無関係に基準機関停止閾値よりも一定の値だけ小さい値が機関停止閾値に設定されてもよいし、触媒の浄化能力が停止閾値補正閾値よりも小さいほど小さい値が機関停止閾値に設定されてもよいし(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど単調減少する値である)、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に小さい値が機関停止閾値に設定されてもよい(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも小さいほど段階的に減少する値である)。
【0099】
第2実施形態には、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。すなわち、第2実施形態では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。これに対し、第2実施形態では、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。したがって、触媒の浄化能力が停止閾値補正閾値よりも小さいときの機関停止閾値は、触媒の浄化能力が停止閾値補正閾値以上であるときの機関停止閾値よりも小さい。このため、要求動力が減少し、機関運転を停止させる必要が生じたときの機関運転の停止は、触媒の浄化能力が停止閾値補正閾値以上であるときよりも、触媒の浄化能力が停止閾値補正閾値よりも小さいときのほうが遅いことになる。そして、その結果、機関運転の継続時間が延長される。このため、触媒の温度をより高い温度まで上昇させることができ、触媒の浄化能力が大きくなる。
【0100】
そして、要求動力が減少したときには、機関運転が実行されているのであるから、触媒の浄化能力が停止閾値補正閾値よりも小さいときに延長される第2実施形態に従った機関運転は、既に実行されている機関運転を継続した結果の運転であり、不必要に機関運転を始動して実行された機関運転ではない。このため、触媒の浄化能力が停止閾値補正閾値よりも小さいことに起因して機関運転の継続時間を延長させたとしても、燃費の低下が抑制されており、且つ、運転者に違和感を与えることが回避されることになる。こうしたことから、第2実施形態によれば、燃費の低下を抑制するとともに運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるのである。
【0101】
なお、第2実施形態では、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。しかしながら、これに代えて、触媒の浄化能力が停止閾値補正閾値以上であるときに、基準機関停止閾値よりも大きい値が機関停止閾値に設定されてもよい。これには、以下のような利点がある。すなわち、基準機関停止閾値よりも大きい値が機関停止閾値に設定されると、機関運転が停止されようとしたときに機関運転が実際に停止されるタイミングが早くなる。これによれば、触媒の温度上昇の終了タイミングが早くなる。しかしながら、触媒の浄化能力が停止閾値補正閾値以上である場合、触媒の浄化能力は比較的高いと言える。つまり、触媒の温度が活性温度に関して十分に高いと言える。この場合、機関運転が停止されようとしたときに機関運転が実際に停止されるタイミングが早くされ、その結果、触媒の温度上昇の終了タイミングが早くされたとしても、そもそも触媒の温度が十分に高いのであるから、触媒が十分に高い浄化能力を発揮することができる。一方、機関運転が実際に停止されるタイミングが早くされれば、その分だけ、消費される燃料が少なくなるのであるから、燃費が高くなる。したがって、触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値が機関停止閾値に設定されることによって、触媒に十分に高い浄化能力を発揮させつつ、燃費を高くすることができるという利点が得られる。
【0102】
なお、上述したように触媒の浄化能力が停止閾値補正閾値以上であるときに基準機関停止閾値よりも大きい値を機関停止閾値に設定する場合、触媒の浄化能力とは無関係に基準機関停止閾値よりも一定の値だけ大きい値が機関停止閾値に設定されてもよいし、触媒の浄化能力が停止閾値補正閾値よりも大きいほど大きい値が機関停止閾値に設定されてもよいし(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど単調増加する値である)、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に大きい値が機関停止閾値に設定されてもよい(この場合、設定される機関停止閾値は、触媒の浄化能力が停止閾値補正閾値よりも大きいほど段階的に増大する値である)。
【0103】
次に、第2実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図5に示されている。なお、図5のルーチンは、所定時間が経過する毎に実行されるルーチンである。また、第2実施形態の動力装置の制御を実行するルーチンとしては、図3に示されているルーチンを採用することができる。
【0104】
図5のルーチンが開始されると、始めに、ステップ200において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ201において、ステップ100で取得された触媒の浄化能力CAが停止閾値補正閾値CAspよりも小さい(CA<CAsp)か否かが判別される。ここで、CA<CAspであると判別されたときには、ルーチンはステップ202に進む。一方、CA<CAspではないと判別されたときには、ルーチンはステップ204に進む。
【0105】
ステップ201においてCA<CAspであると判別され、ルーチンがステップ202に進むと、ステップ100で取得された基準機関停止閾値Pspbから所定値Kspを減算して得られる値(Pspb−Ksp)が機関停止閾値Pspに設定され、ルーチンがステップ203に進む。一方、ステップ201においてCA<CAspではないと判別され、ルーチンがステップ204に進むと、ステップ200で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンがステップ203に進む。ステップ203では、ステップ200で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンが終了する。
【0106】
次に、第3実施形態について説明する。なお、以下で説明されない第3実施形態の構成および制御は、第1実施形態または第2実施形態の構成および制御と同じであるか、あるいは、第3実施形態の構成および制御に鑑みたときに第1実施形態または第2実施形態の構成および制御から当然に導き出される構成および制御である。
【0107】
第3実施形態のハイブリッド車両の構成は、図1に示されている第1実施形態のハイブリッド車両の構成と同じである。そして、第3実施形態では、第1実施形態と同様に要求動力に応じてEVモード制御またはHVモード制御が実行される。
【0108】
次に、第3実施形態の機関始動閾値について説明する。第3実施形態では、第1実施形態と同様に、機関始動閾値を設定するための基準となる零よりも大きい出力動力が基準機関始動閾値として予め用意されている。また、第1実施形態と同様に、基準機関始動閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が始動閾値補正閾値として予め用意されている。
【0109】
そして、第1実施形態と同様に、触媒の浄化能力が始動閾値補正閾値よりも小さいときには、基準機関始動閾値よりも小さい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0110】
一方、第1実施形態と同様に、触媒の浄化能力が始動閾値補正閾値以上であるときには、基準機関始動閾値に等しい値が機関始動閾値に設定される。そして、斯くして設定された機関始動閾値がEVモード制御の実行中に機関運転を始動するか否かの決定に用いられる。すなわち、EVモード制御の実行中に要求動力が斯くして設定された機関始動閾値よりも小さい間は、機関運転の始動は行われず、要求動力が斯くして設定された機関始動閾値以上になったときに機関運転が始動される。
【0111】
次に、第3実施形態の機関停止閾値について説明する。第3実施形態では、第2実施形態と同様に、機関停止閾値を設定するための基準となる零よりも大きい出力動力が基準機関停止閾値として予め用意されている。また、第2実施形態と同様に、基準機関停止閾値を補正するか否かを決定するために用いられる触媒の浄化能力に関する閾値が停止閾値補正閾値として予め用意されている。
【0112】
そして、第2実施形態と同様に、触媒の浄化能力が停止閾値補正閾値よりも小さいときには、基準機関停止閾値よりも小さい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0113】
一方、第2実施形態と同様に、触媒の浄化能力が停止閾値補正閾値以上であるときには、基準機関停止閾値に等しい値が機関停止閾値に設定される。そして、斯くして設定された機関停止閾値がHVモード制御の実行中に機関運転を停止するか否かの決定に用いられる。すなわち、HVモード制御の実行中に要求動力が斯くして設定された機関停止閾値以上である間は、機関運転の停止は行われず、要求動力が斯くして設定された機関停止閾値よりも小さくなったときに機関運転が停止される。
【0114】
なお、第3実施形態において、触媒の浄化能力が始動閾値補正閾値よりも小さいときに設定される機関始動閾値は、第1実施形態と同様に、基準機関始動閾値よりも小さい値であればよい。また、第3実施形態において、触媒の浄化能力が停止閾値補正閾値よりも小さいときに設定される機関停止閾値は、第2実施形態と同様に、基準機関停止閾値よりも小さい値であればよい。
【0115】
また、第3実施形態において、始動閾値補正閾値と停止閾値補正閾値とは互いに同じ値であってもよいし、互いに異なる値であってもよい。
【0116】
第3実施形態には、第1実施形態および第2実施形態に関連して説明した理由と同様な理由から、燃費の低下を抑制する(別の言い方をすれば、内燃機関で消費される燃料の量を少なくする)とともにハイブリッド車両の運転者に違和感を与えることを回避しつつ、触媒の浄化能力を高く維持することができるという利点がある。さらに、第3実施形態では、触媒の浄化能力が始動閾値補正閾値よりも小さいときに基準機関始動閾値よりも小さい値が機関始動閾値に設定されるとともに、触媒の浄化能力が停止閾値補正閾値よりも小さいときに基準機関停止閾値よりも小さい値が機関停止閾値に設定されることから、機関運転の始動が早まるとともに機関運転の停止が遅くなる。このため、第3実施形態によれば、第1実施形態および第2実施形態に比べて、燃費の低下をより確実に抑制するとともに、運転者に違和感を与えることをより確実に回避しつつ、触媒の浄化能力を高く維持することができるという効果がある。
【0117】
次に、第3実施形態の機関始動閾値および機関停止閾値の設定を実行するルーチンの一例について説明する。このルーチンの一例が図6に示されている。なお、図6のルーチンは、所定時間が経過する毎に実行されるルーチンである。また、第3実施形態の動力装置の制御を実行するルーチンとしては、図3に示されているルーチンを採用することができる。
【0118】
図6のルーチンが開始されると、始めに、ステップ300において、触媒の浄化能力CA、基準機関始動閾値Pstb、および、基準機関停止閾値Pspbが取得される。次いで、ステップ301において、ステップ300で取得された触媒の浄化能力CAが始動閾値補正閾値CAstよりも小さい(CA<CAst)か否かが判別される。ここで、CA<CAstであると判別されたときには、ルーチンはステップ302に進む。一方、CA<CAstではないと判別されたときには、ルーチンはステップ304に進む。
【0119】
ステップ301においてCA<CAstであると判別され、ルーチンがステップ302に進むと、ステップ300で取得された基準機関始動閾値Pstbから所定値Kstを減算して得られる値(Pstb−Kst)が機関始動閾値Pstに設定され、ルーチンがステップ303に進む。一方、ステップ301においてCA<CAstではないと判別され、ルーチンがステップ305に進むと、ステップ300で取得された基準機関始動閾値Pstbが機関始動閾値Pstに設定され、ルーチンがステップ303に進む。
【0120】
ステップ303では、ステップ300で取得された触媒の浄化能力CAが停止閾値補正閾値CAspよりも小さい(CA<CAsp)か否かが判別される。ここで、CA<CAspであると判別されたときには、ルーチンはステップ304に進む。一方、CA<CAspではないと判別されたときには、ルーチンはステップ306に進む。
【0121】
ステップ303においてCA<CAspであると判別され、ルーチンがステップ304に進むと、ステップ300で取得された基準機関停止閾値Pspbから所定値Kspを減算して得られる値(Pspb−Ksp)が機関停止閾値Pspに設定され、ルーチンが終了する。一方、ステップ303においてCA<CAspではないと判別され、ルーチンがステップ306に進むと、ステップ300で取得された基準機関停止閾値Pspbが機関停止閾値Pspに設定され、ルーチンが終了する。
【0122】
次に、第4実施形態について説明する。なお、以下で説明されない第4実施形態の構成および制御は、第1実施形態の構成および制御と同じであるか、あるいは、第4実施形態の構成および制御に鑑みたときに第1実施形態の構成および制御から当然に導き出される構成および制御である。
【0123】
第4実施形態の動力装置の制御について説明する。第4実施形態では、上記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意される。
【0124】
そして、触媒の浄化能力が機関停止許可閾値以下となった後に初めて始動された機関運転の実行中(すなわち、HVモード制御の実行中)、触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下であっても機関運転の停止が禁止され、したがって、機関運転が継続される(別の言い方をすれば、HVモード制御の実行が継続される)。つまり、触媒の浄化能力が機関停止許可閾値以下となった後に初めて実行された機関運転の実行中、触媒の浄化能力が機関停止許可閾値以下である間は、要求動力に無関係に機関運転が継続される。
【0125】
そして、触媒の浄化能力が機関停止許可閾値よりも大きくなったときに機関運転の停止が許可される。したがって、触媒の浄化能力が機関停止許可閾値よりも大きくなった後に要求動力が機関停止閾値以下になったときには、機関運転が停止される(すなわち、EVモード制御が実行される)。なお、触媒の浄化能力が機関停止許可閾値よりも大きくなった後は、第1実施形態、または、第2実施形態、または、第3実施形態の動力装置の制御と同じ動力装置の制御が実行される。すなわち、触媒の浄化能力が機関停止許可閾値よりも大きくなった後は、要求動力に応じてEVモード制御またはHVおよび制御が実行される。
【0126】
なお、第4実施形態では、機関運転の停止を許可するか否かを決定するために触媒の浄化能力に関する閾値である機関停止許可閾値が用いられる。しかしながら、これに代えて、触媒の浄化能力が機関停止許可閾値以下となる蓋然性が高い機関運転の停止の継続時間を用いてもよい。この場合、たとえば、触媒の浄化能力が機関停止許可閾値以下となる蓋然性が高い機関運転の停止の継続時間が機関停止許可閾値として設定される。そして、機関運転の停止の継続時間が機関停止許可閾値以上となった後に初めて始動された機関運転の実行中、当該機関運転の始動時点から所定の時間が経過するまでの間、要求動力が機関停止閾値以下であっても当該機関運転の停止が禁止され、したがって、当該機関運転が継続される。そして、当該機関運転の始動時点から所定の時間が経過したときに機関運転の停止が許可される。したがって、当該機関運転の始動時点から所定の時間が経過した後に要求動力が機関停止閾値以下になったときには、機関運転が停止される。
【0127】
第4実施形態には、第1実施形態〜第3実施形態に関連して説明した利点に加えて、機関運転の停止中に触媒の浄化能力が停止閾値補正閾値よりも小さい機関停止許可閾値以下となったとき(すなわち、触媒の浄化能力が比較的大きく低下しているとき)に触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるという利点がある。すなわち、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下になった後に初めて始動された機関運転の実行中に要求動力が機関停止閾値以下になったときに常に機関運転が停止されると、触媒の浄化能力が機関停止許可閾値よりも大きくなる前に機関運転が停止される可能性がある。そして、この場合、触媒の浄化能力が機関停止許可閾値よりも大きくなるまでに比較的長い時間を要することになる。しかしながら、第4実施形態では、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下である間は、要求動力が機関停止閾値以下になったとしても機関運転が継続される。こうしたことから、機関運転の停止中に触媒の浄化能力が機関停止許可閾値以下になったときに触媒の浄化能力を早期に機関停止許可閾値よりも大きくすることができるのである。
【0128】
次に、第4実施形態の動力装置の制御を実行するルーチンの一例について説明する。このルーチンの一例が図7に示されている。なお、図7のルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0129】
図7のルーチンが開始されると、始めに、ステップ40において、要求動力Preqが取得される。次いで、ステップ41において、ステップ40で取得された要求動力Preqが零よりも大きい(Preq>0)か否かが判別される。ここで、Preq>0であると判別されたときには、ルーチンはステップ42に進む。一方、Preq>0ではないと判別されたときには、ルーチンはステップ47に進む。
【0130】
ステップ41においてPreq>0ではないと判別され、ルーチンがステップ47に進むと、第1発電電動機が動力駆動されている場合には、第1発電電動機の動力駆動が停止され、第1発電電動機の動力駆動が既に停止されている場合には、第1発電電動機の動力駆動の停止が継続され、第2発電電動機が動力駆動されている場合には、第2発電電動機の動力駆動が停止され、第2発電電動機の動力駆動が既に停止されている場合には、第2発電電動機の動力駆動の停止が継続される。次いで、ステップ48において、機関運転が実行されている場合には、機関運転が停止され、機関運転が既に停止されている場合には、機関運転の停止が継続される。次いで、ステップ49において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。なお、EVモード制御フラグFevは、EVモード制御が開始されたとき或いは動力装置からの動力の出力が終了したときにセットされ、HVモード制御が開始されたときにリセットされるフラグである。
【0131】
ステップ41においてPreq>0であると判別され、ルーチンがステップ42に進むと、要求動力に応じて第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が開始され、あるいは、第1発電電動機の動力駆動および第2発電電動機の動力駆動のいずれか一方または両方が継続される。次いで、ステップ43において、EVモード制御フラグFevがセットされている(Fev=1)か否かが判別される。ステップ43において、Fev=1であると判別されたとき(すなわち、EVモード制御が実行されているとき、あるいは、動力装置からの動力の出力が停止された後に初めてルーチンがステップ13に到来したとき)には、ルーチンはステップ44に進む。一方、Fev=1ではない(すなわち、Fev=0である)と判別されたとき(すなわち、HVモード制御が実行されているとき)には、ルーチンはステップ50Aに進む。
【0132】
ステップ43においてFev=1であると判別され、ルーチンがステップ44に進むと、ステップ40で取得された要求動力が機関始動閾値Pst以上である(Preq≧Pst)か否かが判別される。ここで、Preq≧Pstであると判別されたときには、ルーチンはステップ45に進む。一方、Preq≧Pstではないと判別されたときには、ルーチンは終了する。
【0133】
ステップ44においてPreq≧Pstであると判別され、ルーチンがステップ45に進むと、機関運転が始動される。次いで、ステップ46において、EVモード制御フラグFevがリセットされ(Fev←0)、ルーチンが終了する。
【0134】
ステップ43においてFev=1ではないと判別され、ルーチンがステップ50Aに進むと、機関運転継続フラグFinがリセットされている(Fin=0)か否かが判別される。機関運転継続フラグFinは、機関運転の停止を禁止して機関運転を継続すべきか否かを示すフラグであって、図8のステップ62でセットされ、図8のステップ63でリセットされるフラグである。ステップ50Aにおいて、Fin=0であると判別されたときには、ルーチンはステップ50に進む。一方、Fin=0ではないと判別されたときには、ルーチンは終了する。
【0135】
ステップ50AにおいてFin=0であると判別され、ルーチンがステップ50に進むと、ステップ40で取得された要求動力Preqが機関停止閾値Psp以下である(Preq≦Psp)か否かが判別される。ここで、Preq≦Pspであると判別されたときには、ルーチンはステップ51に進む。一方、Preq≦Pspではないと判別されたときには、ルーチンは終了する。
【0136】
ステップ50においてPreq≦Pspであると判別され、ルーチンがステップ51に進むと、機関運転が停止される。次いで、ステップ52において、EVモード制御フラグFevがセットされ(Fev←1)、ルーチンが終了する。
【0137】
次に、図7のステップ50Aにおいて用いられる機関運転継続フラグの設定を実行するルーチンの一例について説明する。このルーチンの一例が図8に示されている。なお、このルーチンは、所定時間が経過する毎に実行されるルーチンである。
【0138】
図8のルーチンが開始されると、始めに、ステップ60において、触媒の浄化能力CAが取得される。次いで、ステップ61において、ステップ60で取得された触媒の浄化能力CAが機関停止許可閾値CAin以下である(CA≦CAin)か否かが判別される。ここで、CA≦CAinであると判別されたときには、ルーチンはステップ62に進み、機関運転継続フラグFinがセットされ(Fin←1)、ルーチンが終了する。一方、CA≦CAinではないと判別されたときには、ルーチンはステップ63に進み、機関運転継続フラグFinがリセットされ(Fin←0)、ルーチンが終了する。
【0139】
なお、上述した実施形態の内燃機関は、圧縮自着火式の内燃機関であるが、本発明は、火花点火式の内燃機関(いわゆるガソリンエンジン)を具備する動力装置の制御装置にも適用可能である。
【符号の説明】
【0140】
10…内燃機関、MG1…第1発電電動機、MG2…第2発電電動機、21…燃料噴射弁、43…触媒コンバータ、43a…触媒、50…動力分配装置
【特許請求の範囲】
【請求項1】
内燃機関を具備し、動力を出力する動力装置であって、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定され、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる動力装置の制御装置において、
内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備し、零よりも大きい出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零以上の出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関始動閾値を補正するか否かを決定するために用いられる零以上の閾値が始動閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記始動閾値補正閾値よりも小さいときには前記基準機関始動閾値よりも小さい値が前記機関始動閾値に設定され、前記触媒の浄化能力が前記始動閾値補正閾値以上であるときには前記基準機関始動閾値に等しい値または前記基準機関始動閾値よりも大きい値が前記機関始動閾値に設定され、
前記触媒の浄化能力とは無関係に前記基準機関停止閾値に等しい値が前記機関停止閾値に設定される、動力装置の制御装置。
【請求項2】
請求項1に記載の内燃機関の制御装置において、前記基準機関停止閾値が零よりも大きい値であり、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定される、内燃機関の制御装置。
【請求項3】
内燃機関を具備し、動力を出力する動力装置であって、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定され、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる動力装置の制御装置において、
内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備し、零以上の出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零よりも大きい出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定され、
前記触媒の浄化能力とは無関係に前記基準機関始動閾値に等しい値が前記機関始動閾値に設定される、動力装置の制御装置。
【請求項4】
電動機をさらに具備し、要求動力が零よりも大きいときに当該動力装置から出力される動力の一部として前記電動機から出力される動力が利用される請求項1〜請求項3のいずれか1つに記載の動力装置の制御装置。
【請求項5】
請求項1〜請求項4のいずれか1つに記載の動力装置の制御装置において、前記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意され、
前記触媒の浄化能力が前記機関停止許可閾値以下となった後に初めて始動された内燃機関の運転の実行中に前記触媒の浄化能力が前記機関停止許可閾値以下である間、要求動力が前記機関停止閾値以下であっても内燃機関の運転を継続させ、前記触媒の浄化能力が前記機関停止許可閾値よりも大きくなった後、要求動力が前記機関停止閾値以下になったときに内燃機関の運転が停止される、動力装置の制御装置。
【請求項1】
内燃機関を具備し、動力を出力する動力装置であって、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定され、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる動力装置の制御装置において、
内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備し、零よりも大きい出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零以上の出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関始動閾値を補正するか否かを決定するために用いられる零以上の閾値が始動閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記始動閾値補正閾値よりも小さいときには前記基準機関始動閾値よりも小さい値が前記機関始動閾値に設定され、前記触媒の浄化能力が前記始動閾値補正閾値以上であるときには前記基準機関始動閾値に等しい値または前記基準機関始動閾値よりも大きい値が前記機関始動閾値に設定され、
前記触媒の浄化能力とは無関係に前記基準機関停止閾値に等しい値が前記機関停止閾値に設定される、動力装置の制御装置。
【請求項2】
請求項1に記載の内燃機関の制御装置において、前記基準機関停止閾値が零よりも大きい値であり、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定される、内燃機関の制御装置。
【請求項3】
内燃機関を具備し、動力を出力する動力装置であって、当該動力装置から出力される動力である出力動力に関する閾値であって内燃機関の運転を始動させるか否かを決定するために用いられる閾値が機関始動閾値として設定されるとともに、出力動力に関する閾値であって内燃機関の運転を停止させるか否かを決定するために用いられる閾値が機関停止閾値として設定され、内燃機関の運転の停止中に当該動力装置に要求される出力動力である要求動力が前記機関始動閾値以上になったときに内燃機関の運転を始動させ、内燃機関の運転中に要求動力が前記機関停止閾値以下になったときに内燃機関の運転を停止させる動力装置の制御装置において、
内燃機関が該内燃機関の燃焼室から排出される排気ガス中の成分を浄化する触媒を具備し、零以上の出力動力が前記機関始動閾値を設定するための基準となる基準機関始動閾値として予め用意され、零よりも大きい出力動力が前記機関停止閾値を設定するための基準となる基準機関停止閾値として予め用意され、前記触媒の浄化能力に関する閾値であって前記基準機関停止閾値を補正するか否かを決定するために用いられる零以上の閾値が停止閾値補正閾値として予め用意され、
前記触媒の浄化能力が前記停止閾値補正閾値よりも小さいときには前記基準機関停止閾値よりも小さい値が前記機関停止閾値に設定され、前記触媒の浄化能力が前記停止閾値補正閾値以上であるときには前記基準機関停止閾値に等しい値または前記基準機関停止閾値よりも大きい値が前記機関停止閾値に設定され、
前記触媒の浄化能力とは無関係に前記基準機関始動閾値に等しい値が前記機関始動閾値に設定される、動力装置の制御装置。
【請求項4】
電動機をさらに具備し、要求動力が零よりも大きいときに当該動力装置から出力される動力の一部として前記電動機から出力される動力が利用される請求項1〜請求項3のいずれか1つに記載の動力装置の制御装置。
【請求項5】
請求項1〜請求項4のいずれか1つに記載の動力装置の制御装置において、前記停止閾値補正閾値よりも小さい触媒の浄化能力が内燃機関の運転の停止を許可するか否かを決定するために用いられる機関停止許可閾値として用意され、
前記触媒の浄化能力が前記機関停止許可閾値以下となった後に初めて始動された内燃機関の運転の実行中に前記触媒の浄化能力が前記機関停止許可閾値以下である間、要求動力が前記機関停止閾値以下であっても内燃機関の運転を継続させ、前記触媒の浄化能力が前記機関停止許可閾値よりも大きくなった後、要求動力が前記機関停止閾値以下になったときに内燃機関の運転が停止される、動力装置の制御装置。
【図1】


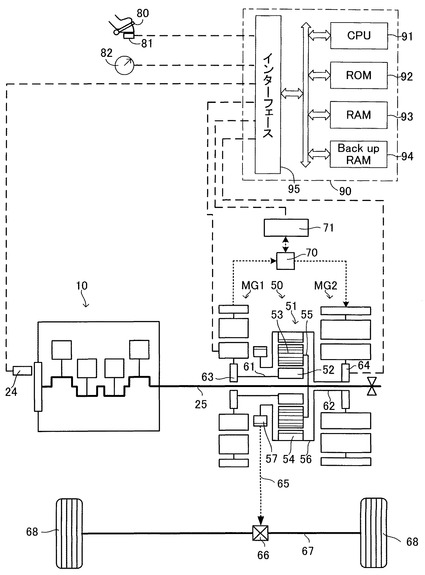
【図2】
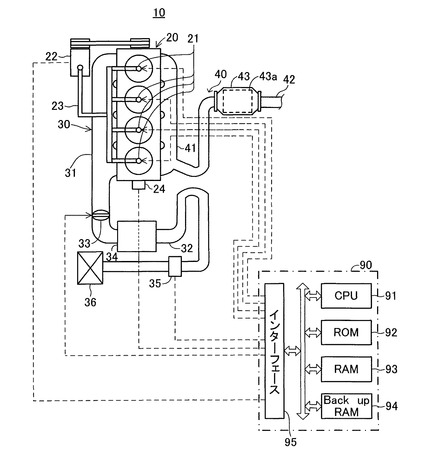
【図3】
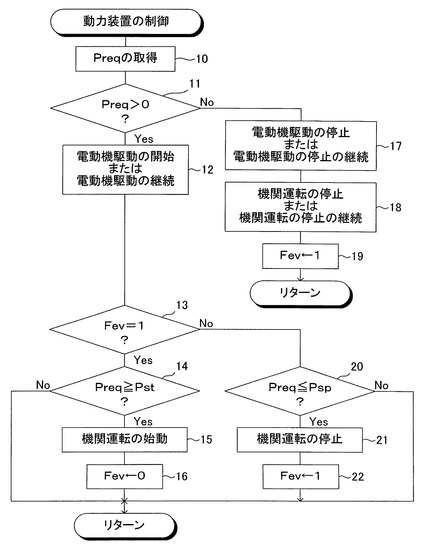
【図4】
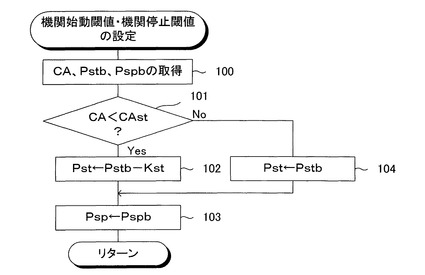
【図5】
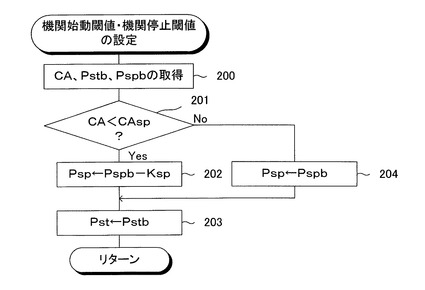
【図6】
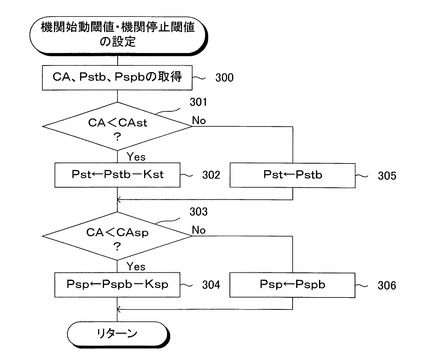
【図7】
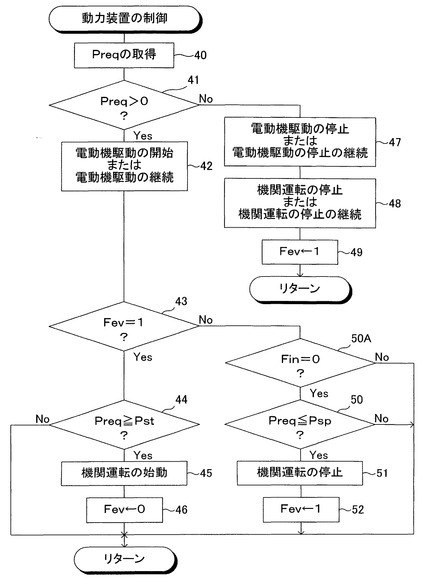
【図8】
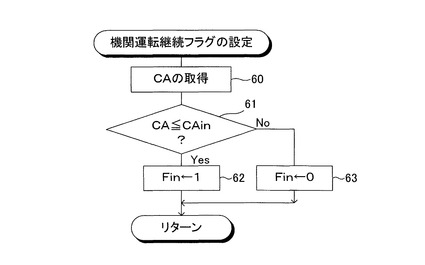
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−24223(P2013−24223A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162779(P2011−162779)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]