
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置と方法
【課題】安全で効果的な治療と治療過誤の危険を減じ、患者の不快感を最小化する放射線治療を提供する。
【解決手段】1箇所以上の計画位置に挿入されるn本の中空治療経路からなる一群と、mを2以上、nを1以上として、n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路36a,36bからなる一群と、m本の送出経路36a,36bのどれがn本の中空治療経路のどれに接続しているかを同定する同定手段とを有する。同定手段は追跡経路に収容された追跡要素と、エネルギー放出源を対応するソース経路33a,33bに保管するための保管手段と、エネルギー放出源をそれぞれのソース経路から相互接続された送出経路36a,36bと治療経路10のうちの対応する1本を経由して計画位置の1つに向かって一時的に挿入するための送出手段と、m本の送出経路の少なくとも1本を中空治療経路の対応する1本に連結するための連結手段とを備える。
【解決手段】1箇所以上の計画位置に挿入されるn本の中空治療経路からなる一群と、mを2以上、nを1以上として、n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路36a,36bからなる一群と、m本の送出経路36a,36bのどれがn本の中空治療経路のどれに接続しているかを同定する同定手段とを有する。同定手段は追跡経路に収容された追跡要素と、エネルギー放出源を対応するソース経路33a,33bに保管するための保管手段と、エネルギー放出源をそれぞれのソース経路から相互接続された送出経路36a,36bと治療経路10のうちの対応する1本を経由して計画位置の1つに向かって一時的に挿入するための送出手段と、m本の送出経路の少なくとも1本を中空治療経路の対応する1本に連結するための連結手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動物体の事前選択された解剖学的部分に対して放射線治療を行う装置に関する。この装置は、前記事前選択された解剖学的部分の1箇所以上の事前計画位置に挿入されるn本の中空治療経路からなる一群と、mを2以上、nを1以上として、前記n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路からなる一群と、追跡経路に収容され、前記相互接続されたm本の送出経路とm本の治療経路のそれぞれを経由して前記追跡経路から変位するように構成された追跡要素を有し、前記m本の送出経路のどれが前記n本の中空治療経路のどれに接続しているかを同定するための同定手段と、k≦mなるk個のエネルギー放出源を対応するソース経路に保管するための保管手段と、前記k個のエネルギー放出源をそれぞれのソース経路から前記相互接続されたm本の送出経路とm本の治療経路のうちの対応する1本を経由して前記解剖学的部分内の前記事前計画位置の1つに向かって一時的に挿入するための送出手段と、前記m本の送出経路の少なくとも1本を対応する1本の治療経路に連結するための連結手段とを備える。
【0002】
本発明はまた、動物体の事前選択された解剖学的部分に対して放射線治療を行う方法に関する。この方法は、i)前記事前選択された解剖学的部分の1箇所以上の位置にn本の中空治療経路からなる一群を挿入する工程と、ii)前記n本の中空治療経路からなる一群を固定位置決め接続テンプレートのn個の接続位置からなる一群と永続的に接続する工程と、iii)m本の送出経路からなる一群を前記テンプレートのn本の接続位置からなる一群のうちのm本に接続する工程と、iv)k個のエネルギー放出源をそれぞれ前記m本の送出経路及び相互接続されたn本の治療経路のうちの1本を経由して前記事前選択された解剖学的部分内の1つ以上の位置に向かって挿入する工程からなる。
【背景技術】
【0003】
遠隔アフタローダは、概して癌治療分野で使用され、特定時間だけ特定距離だけガンマ放射線放出源を収容した可撓性ワイヤを正確に進退させる装置である。遠隔アフタローダは、放射線放出源のための放射線遮蔽筺体の他に、テスト用の可撓性シミュレーションワイヤと、ガンマ放射線放出源を有する可撓性ワイヤと、2つのタイプのワイヤを操作するための特定制御及び移動機構とからなる。
【0004】
典型的には、治療場所への1本以上のカテーテルや針や他の閉経路(以下「治療経路」又は「治療針」)が患者内に位置決めされる。その後、治療経路はアフタローダに装着される。アフタローダは、線源保管庫から相互接続された送出経路及び前記送出経路に接続した治療経路を通して移動ワイヤ端の放射線源を前進させる。移動ワイヤはソースワイヤとも称される。
【0005】
続いてエネルギー放出源を相互接続した送出経路・治療経路経由で腫瘍内の数カ所に位置決めする。正しい治療放射線量を腫瘍に送出するために、この位置決めは治療計画システムによって計算された所定の順序に従って行われる。
【0006】
現在用いられている放射線(エネルギー)放出源は放射性線源である。この線源は、自然放射能性崩壊の原理に従ってガンマ放射線を持続的に放出するもので、使用放射性物質の固有半減期に特徴を持つ。このような治療に使用される線源は治療を実施する使用者(医者、物理学者、看護士など)に危険をもたらす。したがって、アフタローダは、専門技術者への被爆を最小に、或いは、一切被爆させることなく放射性線源を患者に挿入するために使用される。
【0007】
これらのアフタローダ装置は、治療を実施する使用者が患者から離れた所まで移動もしくは治療室を退室後に、患者に放射性線源を挿入することができる。換言すれば、放射性線源は、使用者が患者から離れた後、治療のために患者に装着される。そのためこのような装置は一般に「遠隔アフタローダ装置」と称される。
【発明の開示】
【発明が解決しようとする課題】
【0008】
近接照射療法を用いて大きな腫瘍を治療する必要がある場合、患者体(従って治療すべき腫瘍)内に挿入使用される中空針の数は大きなものとなりうる。腫瘍内に挿入する治療経路の数が増えるに従って、治療経路と送出経路との接続を間違える危険性は増し、その結果、誤実施を生じる。
【0009】
このため、治療経路及び相互接続した送出経路の同定を行って、事前計画された治療計画に従って腫瘍内の正確な位置に正しい送出経路と治療経路を経由して正しい線源を位置決めする。
【0010】
これらの従来装置の欠点は、ダミーが次の治療経路を照合した後でなければ線源を保管手段から送出経路・治療経路に移動できないという点である。このため、治療経路の数が多ければ待ち時間が多くなり、患者に対する平均治療時間が伸びてしまう(それゆえ不快感が増加する)。
【0011】
前述システムの更なる欠点は、患者が多数の治療経路に永続的に接続されており、治療計画に従って治療経路が送出経路に正しく接続されているかどうかを追跡要素(ダミー線源)が自動的に検知できないことである。
【0012】
上述の装置例は、本出願人名義の未発行ヨーロッパ特許出願第05076645.0号明細書に開示されている。
【0013】
本発明は、より安全でより効果的な治療を可能とし、治療過誤の危険を減じ、患者の不快感を最小化する、上述の序文に記載の装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明によれば、更に、連結手段の1つの連結位置だけで、k個のエネルギー放出源を択一的かつ同時に、m本の送出経路に接続したm本の治療経路からなる第1群に対してm本の送出経路経由で挿入可能となるように送出経路接続手段が構成される。なお、m本の送出経路とm本の治療経路は同定手段によって事前に照合される。
【0015】
これによって、複数のソース経路を正しく選択して追跡経路と共に1本以上の送出経路に正しく相互接続することが可能となる。その結果、複数のエネルギー放出源を前記特定の送出経路経由で患者体内に一時的に設置でき、事前計画された治療処置の順序で次の治療経路を正しく同定し同時に照合して、待ち時間を全体として減少できる、より多目的な装置となる。
【0016】
更にまた、この結果患者に与える不快感は減じられる。
【0017】
より具体的には、送出経路接続手段は円筒形要素を有し、円筒形要素はその縦軸を中心に回転可能であり、溝を有し、各溝は、前記ソース経路の1つ或いは前記追跡経路のどちらか一方に前記m本の送出経路の1つを相互接続させる。
【0018】
好適な一実施例では、前記溝の少なくとも2つは直線溝として成形される。また、他の実施例では、前記直線溝は互いに直交する。
【0019】
また、更なる実施例では、少なくとも1つの更なる溝が曲線溝として成形される。これにより、1本以上のソース経路が追跡経路と共に複数の送出経路・治療経路と素早く且つ多目的に同時相互接続され、(前記治療経路から複数のエネルギー放出源を挿入することによって)複数の治療処置を行い、次の治療時のために別の送出経路・治療経路を正しく同定することが可能となる。
【0020】
その結果、治療処置の速度を上げ、患者への不快感を軽減することになる。
【0021】
より具体的には、前記少なくとも1つの曲線溝は円筒周面の1/4を示す。
【0022】
一実施例では、前記溝は、回転の縦軸と垂直に延伸する前記円筒形要素の一端面に設けられる。また、別の実施例では、前記溝は、回転の縦軸とほぼ並行に延伸する前記円筒形要素の周面に設けられる。
【0023】
別の多目的な実施例では、送出経路接続手段は横方向に変位可能な移動要素を有し、前記移動要素には、前記m本の送出経路の1つを前記ソース経路の1つ或いは前記追跡経路のどちらか一方に相互接続する溝が設けられる。
【0024】
より具体的には前記溝は直線溝として成形される。また、前記溝は前記要素の横方向変位を考慮して傾斜している。
【0025】
本発明による装置の正確で安全な動作のために、前記m本の送出経路をそれぞれ前記対応するm本の中空治療経路の1本に接続するために接続手段が存在する。
【0026】
より具体的には、前記連結手段は、前記m本の送出経路を搬送するロボットアームを有し、前記ロボットアームはその自由端に連結要素を有する。前記連結要素は、前記n本の中空治療経路の群が接続されるテンプレートに係合するように構成される。
【0027】
動作誤差を最小化し、複数のエネルギー放出源を用いた治療処置を行う上で安全な環境を改善するために、連結手段は、連結要素上に存在する少なくとも1つの起動可能検知要素を有する。
【0028】
好適な一実施例では、検知要素は1対の発光要素と受光要素からなる。また、別の実施例では、連結手段は、治療中に連結要素とテンプレートとの連結を維持するために連結要素上に存在する少なくとも1つの電磁石を有する。
【0029】
本発明による装置の好適な一実施例では、k=2及びm=4である。
【0030】
本発明による方法は更に、工程iii)が、v)m本の送出経路を、治療経路に接続されたテンプレートの前記n個の接続位置からなる一群のうちの別のm個の位置に選択的かつ択一的に接続する工程を含むことを特徴とする。
【0031】
本発明は、また、放射線遮蔽区画に収容され、動物体の事前選択された解剖学的部分内の1つの位置に1つの挿入経路経由で挿入されるように構成されたエネルギー放出源を分類する方法にも関する。この方法は、a)前記エネルギー放出源を遮蔽要素を用いて前記放射線遮蔽区画から前記挿入経路経由で一定距離だけ変位させる工程と、b)前記一定距離の変位中に当該距離上の異なる位置において前記放射線放出源から送出される線量を検出する工程と、c)当該距離上の前記異なる位置における線量を判定する工程と、d)前記判定線量計測値を1つ以上の事前決定され記憶された線量−距離曲線と比較する工程とからなる。
【発明を実施するための最良の形態】
【0032】
付属図面を参照して本発明を説明する。
【0033】
明瞭にするために、以下の詳細な説明では、図面に示した対応する部分は同一参照番号で表示される。
【0034】
図1には、EP05076645.0に開示された従来技術による装置の具体的な一実施例が示されている。治療装置12は、治療計画ユニット12と放射線送出又は駆動手段8を有する。放射線送出又は駆動手段8は、接続要素22を備えたロボットアームに接続された搬送チューブ20を有する。接続要素22は、選択した治療経路10の近位端10aに連絡可能である。治療経路10は、テンプレート5を用いて、患者体1内部の事前選択された目標組織11、例えば、前立腺に挿入される。テンプレート5は別途患者体に接続される。
【0035】
接続要素22は、放射線駆動手段8に接続している送出経路の挿入口内に伸びる貫通孔を備える。接続要素22がテンプレート5及び中空針10の露出端10aに整列接触するまで、ロボットアームの移動は監視、操作される。それに続く追跡ワイヤ(図示せず)は、送出経路経由で、接続要素22に相互接続した中空針10に向かって誘導される。追跡ワイヤの遠位端には追跡要素が存在する。追跡要素は、好適には、電磁追跡要素である。
【0036】
選択した中空針10を経由した電磁追跡要素の変位は、EP05076645.0に記載の適当な手段を用いて再現することができる。得られた情報は中空針10の実際の姿勢を表現しており、この再現された姿勢や位置は、放射線治療を行う時に患者体内に挿入すべき複数の中空針10、10’などの事前計画姿勢と比較される。
【0037】
続いて、追跡要素を有する追跡ワイヤを中空針10から治療装置8、12内に引き戻す。放射線治療処置を実施するために、遠位端にエネルギー放出源(HDR又はLDR線源)を有する誘導又はソースワイヤを接続要素22及び中空針10経由で前進させる。
【0038】
続いて、誘導ワイヤ及びエネルギー放出源を治療装置8、12内に引き戻し、接続要素22をテンプレート5・針10から切り離し、患者体1内部の異なる位置に挿入した別の中空針10’に対して整列させる。
【0039】
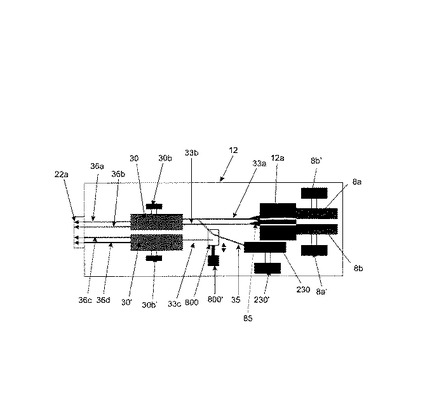
本発明の装置の第1実施例が図2に示される。本装置は筺体12に収容した複数のエネルギー放出源を操作可能である。本実施例では2つの線源を使用するが、3以上の線源を導入することも可能である。各エネルギー放出源60a、60bは対応するソースワイヤ34a、34bに搭載され、対応するソース経路33a、33bに収容され、遮蔽12aに保管される。線源60a、60bは、適当な放射線駆動手段8a、8b(変位手段)によって本装置から患者に対して進退させることができる。
【0040】
図1の従来技術と同様、図2の実施例には、送出経路36a、36bのどの経路が患者体1に位置決めされた治療経路10の1つに接続されているかを正確に同定するために、追跡経路35に収容した追跡ワイヤ23に接続した追跡要素23aを有する同定手段230が設けられる。
【0041】
図1の実施例には、埋め込まれた治療経路10、10’などのそれぞれにロボットアーム20を用いて順次接続される1つの送出経路が設けられているが、図2の実施例のロボットアームには、複数の治療経路又は埋込針10を患者体1内に配置するテンプレート55にロボットアーム20の接続要素22を用いて相互接続される少なくとも2本の送出経路36a、36bが設けられる。
【0042】
それゆえ、図2の実施例には、遮蔽12aを用いて装置12に安全に装着した対応するエネルギー放出源送出手段8a、8bにそれぞれ接続した少なくとも2つのソース経路33a、33bが設けられる。放射線駆動手段8a、8bからはエネルギー放出源60a、60b(本図には図示していないが、図8には図示)は、適当なソースワイヤ34a、34bを用いてソース経路33a、33b内を進退させることができる。同様に、同定手段230は追跡経路35に収容した追跡ワイヤ23を有する。この追跡ワイヤ23はその自由遠位端に追跡要素23aを備える。
【0043】
図2の装置12が正しく動作するために、前記ソース経路33a、33bの1つ以上を前記送出経路36a、36bの1つに正しく相互接続させるための所謂ソース経路接続手段30が設けられる。更に又、追跡経路35を別の前記送出経路36a、36bに同時接続するように送出経路接続手段30を構成する。
【0044】
換言すれば、図2に示す本発明の装置12は、追跡経路35を2つの送出経路36a、36bに接続し、2つのソース経路33a、33bを2つの送出経路36a、36bに同時に接続するか、ソース60a、60bの待ち時間を生じる照合手順後には2つの送出経路36a、36bに二者択一的に接続するか、同一接続位置でありながら2つの接続状態を二者択一的にのみ可能とする(本図には図示していないが、図8には図示)。
【0045】
図3A及び3Bには、送出経路接続手段30の第1実施例が示される。図3A及び3Bの実施例では、送出経路接続手段は円盤形要素として成形され、その縦軸30aを中心に回転可能である。このディスク30は溝31a、31b及び32a、32bを備える。各溝は、前記送出経路36a、36bの1本をソース経路33a、33bの1本又は追跡経路35のどちらか一方に相互接続可能である。図3A、3Bに明瞭に示すように、前記溝31a、31bの少なくとも2本は直線溝として成形される。これらの直線溝は本実施例では互いに直交する。別の実施例では、前記溝32a、32bの少なくとも1本は好適には1/4曲率を示す曲線溝として成形される。
【0046】
図3Aに示す第1動作状態では、円筒形接続要素30は、直線溝31aが放射線駆動装置8bのソース経路33bを送出経路36bに相互接続させるように位置決めされる。これによって、ソースワイヤ34bと前記放射線駆動手段8bに収容したエネルギー放出源60b(本図には図示しないが、図8には図示)はソース経路33b、相互接続溝又は経路31a経由で送出経路36bに向かって前進可能になる。同様に、相互接続溝又は経路31bは、ソース経路33aを送出経路36aに相互接続し、ソースワイヤ34aとエネルギー放出源60b(図示せず)が放射線駆動手段8aから送出経路36aに向かって前進可能になる。
【0047】
図2の装置は、追跡経路を2つの送出経路及び2つのソース経路に同時に接続するか、ソース60a、60bの待ち時間を生じる照合手順中には2つの送出経路に二者択一的に接続するか、同一接続位置でありながら2つの接続状態を二者択一的にのみ可能とする。
【0048】
図3Bでは、送出経路接続手段・円筒形要素30はその縦軸30aを中心に45°以上回転し、2つの直線溝31a、31bをソース経路33a、33b及び送出経路36a、36bの1つと整列させない。しかし、円盤形要素30の回転変位によって、今度は曲線溝32a、32bがソース経路33a−追跡経路35(送出経路36aを含む)及びソース経路33b(送出経路36bを含む)とそれぞれ整列する。
【0049】
この動作状態では、今度は放射線駆動手段8bのエネルギー放出源60b(図示せず)がソースワイヤ34bを用いてソース経路33b経由で他方の送出経路36bに向けて前進される。同時に、追跡経路35は曲線溝32a経由で一方の送出経路36aと相互接続されており、送出経路36aによる追跡ワイヤ23(追跡要素23aを含む)の前進が可能となっている。
【0050】
この動作状態で、放射線駆動手段8bを用いて1つの放射線処置が実施可能となるが、同時に、今度は追跡要素23aを用いて別の治療経路を同定してエネルギー放出源を患者体内まで挿入可能となる。
【0051】
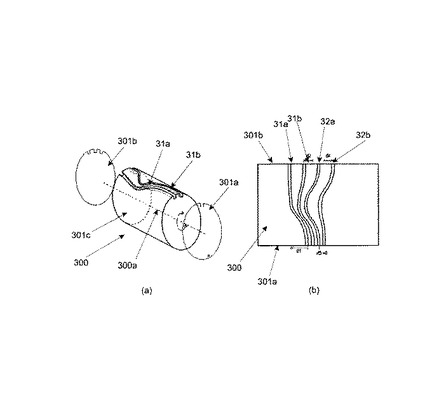
図7及び8には、送出経路接続手段の別の実施例が開示されるが、今度は参照番号300で示される。本実施例では、送出経路接続手段は更に、その縦軸300aを中心に回転可能な回転可能接続要素を含む。回転可能接続要素は、入口端面301aと出口端面301bを有する。図7及び8の実施例は、縦軸300aにほぼ平行に延びる複数の溝が存在する周面301cを持つ円筒形要素300を構成する。
【0052】
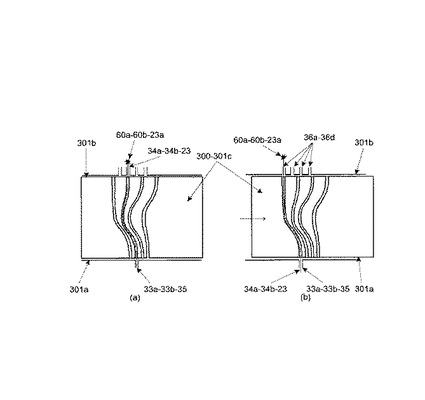
図7Aの実施例では2つの縦方向に延びる溝31a、31bが存在するが、図7Bの実施例では4つの溝31a、31b、32a、32bが存在する。円筒形の経路接続要素300が縦軸300aに沿って回転すると、1つ以上の動作状態で溝31a、31b、32a、32bはその入口端面301aにおいて前記ソース経路33a、33bの1つ及び追跡経路35と整列可能となる一方、溝31a、31b、32a、32bはその出口端面301bにおいて前記送出経路36a、36dの1つと整列可能となる(図8A、8Bを参照)。
【0053】
図8A、8Bで分かるように、円筒経路接続要素300の回転姿勢によって、前記ソース経路33a、33bの1つ又は追跡経路35から前記送出経路36a、36bの1つに向かって追跡ワイヤ23のソースワイヤ34a、34bを誘導して、対応するエネルギー放出源60a、60b又は追跡要素23aを、患者体内に埋め込まれ、対応する送出経路36a〜36dに相互接続した目標治療経路に向かって前進させることが可能となる。
【0054】
図4及び5には、本発明による送出経路接続手段の代替実施例が開示される。本実施例では、送出経路接続手段は移動要素80として構成される。移動要素80は、横方向(ソース経路33a、33b及び/又は追跡経路35の方位に垂直)に変位可能である。移動要素80には、移動要素の横方向変位によって送出経路36a、36bなどの1つをソース経路33a、33bの1つ又は追跡経路35に相互接続可能な溝又は経路が設けられる。移動要素80は2つの要素部分80a、80bからなる。要素部分80aは固定的に位置決めされる。要素部分80bは固定要素部分80aに対して横方向変位可能である。しかし、別の実施例では、要素部分80bを固定的に位置決めして、他方の要素部分80aが横方向変位可能であってもよいことは明らかであろう。
【0055】
要素部分80aには、本実施例では、3つの出口溝又は経路82a、82b、82cが設けられる。出口溝82a、82cは接続ブロック38経由で送出経路36aに接続されるが、出口溝82bは接続ブロック38経由で他方の送出経路36bに接続される。移動要素部分80bには、同様に、2つの入口溝又は経路83a、83bが設けられる。入口溝83a、83bは接続ブロック37を用いて、ここでは2つのソース経路33a、33b及び1つの追跡経路35に相互接続される。
【0056】
図4A、4B及び5A、5Bには4つの動作状態が示される。図4Aでは入口経路83a、83bが出口経路82a、82bに相互接続して、エネルギー放出源(図示せず)60a、60bをソース経路33a、33b経由で送出経路36a、36bに前進可能にする。
【0057】
図4Bの動作状態では、移動要素部分80bを横方向(右)に移動させ、入口経路83bを出口経路82c(及び送出経路36aを含むソース経路33b)に相互接続すると共に、入口経路83bを出口経路82b(及び送出経路36bを含むソース経路33a)に相互接続する。この動作状態では、ソース経路33a、33bと送出経路36a、36bとの相互接続は、図4Aの動作状態に対して移動又は切り換えられている。
【0058】
図5Aの動作状態(図4Aの状態に相当)では、正しい送出経路36a及び相互接続(図示せず)治療経路を同定するために、追跡経路35は、追跡要素を同定手段230(図2を参照)から入口経路83a、出口経路82aを経て送出経路36aへ前進させるのに使用される。図5Bの動作状態(図4Bの状態に相当)では、再度同定のために、追跡要素23aを追跡経路35から他方の送出経路36bへ前進させることができる。
【0059】
図6A及び6Bには、本発明による装置12の更に2つの実施例がより概略的に示されるが、これらは図2の実施例とほぼ同じ技術特徴を有する。図6A及び6Bの実施例は、更なる移動要素800が送出経路接続手段の一部となるという追加特徴を有する。前記更なる移動要素800は、図4、5の切替要素80の簡素化版であり、図6Aの実施例では追跡経路35に接続して切替要素30、30’に接続する1つの入口経路83aを有する。
【0060】
図6Bの実施例では、少なくとも2つのエネルギー放出源を用いる。エネルギー源はそれぞれ、遮蔽12aに収容され、放射線駆動手段8a、8b(図6Aの実施例と同様)によって変位される。更に、同定手段230に収容した1つの追跡要素23aを用いる。しかし、本実施例では、4本の送出経路36a〜36dが用いられ、ロボットアーム20(図2)を用いて患者体内に埋め込まれた対応する治療経路に相互接続される。前記送出経路36a〜36dの1つをソース経路33a、33bの1つ及び追跡経路35に対して正しく選択可能とするため、図3A〜3B(又は図4〜5、7〜8)に示すような2つの経路接続要素を移動要素と組み合わせて使用する。
【0061】
この図6Bの実施例にも、図4〜5の切替要素の簡素化版である移動要素800が使用される(図6Aに加えて示す)。移動要素800は、追跡経路35に接続した1つの入口経路83aを有し、切替要素30、30’に接続している。
【0062】
図6A〜6Bの2つの簡素化した移動要素800は、追跡経路35をソース経路33a、33b、33c、33dのどれか1つに(つまり、切替要素30、30’の一方に)相互接続するように駆動手段800’(要素部分80bの横方向に変位)によって操作可能である。同様に、各切替要素30、30’は、動作手段30b、30b’を用いて操作可能である。この操作は、例えば、図3A〜3Bの円盤形切替要素を回転させることによって、或いは、図7〜8の円筒切替要素を回転させることによって、或いは、図4〜5の切替要素を用いて行われる。各切替要素30、30’は、それぞれ送出経路36a〜36b又は36c〜36dのどちらか一方を選択するために使用される。
【0063】
図6A〜6Bの実施例を図3a〜3b、図4〜5或いは図7〜8の実施例と組み合わせると、2つのエネルギー放出源60a、60b(本図には図示していないが、図8に図示)をそれぞれのソース経路33a、33b及び追跡経路35経由で送出経路36a、36b(36a、36b)の方向に前進させることができる。この場合、送出経路接続手段30は、送出経路36a〜36dに択一的に接続でき、2つのエネルギー放出源60a、60b(本図ではなく図8に図示)を送出経路36a、36bのどちらか一方に同時且つ二者択一的に挿入可能である。
【0064】
同時に、追跡要素23aは、テンプレート55に対する(ロボットアーム20の)接続要素22の1つの接続位置において全ての送出経路36a〜36dを照合するように変位させることができる。まず、送出経路36a、36bが照合・同定される。その後、線源60a、60bがこの照合された送出経路36a、36bに挿入されると同時に、追跡ワイヤ23は切替要素80を送出経路36c、36dに切り替えて移動する。
【0065】
図9にはロボットアーム20の接続要素22の一実施例が開示される。この接続要素は、複数の中空治療経路10が接続したテンプレート55に係合するように構成される。テンプレート55には、従って、適当な連結部品10cを用いて複数の治療経路10(埋込針)を収容可能な複数の溝又は孔55aが設けられる。この治療経路10は患者体1内に埋め込まれる。
【0066】
接続要素22はテンプレート55から取り外し可能になっており、少なくとも2つの送出経路36a、36bを備えたロボットアーム20を対応する埋込治療経路10に順次相互接続可能である。それゆえ、患者10は、埋込治療経路(埋込針)10と同数の多数の送出経路によって本発明の装置12と相互接続されることが回避される。患者は、好適には治療台に固定したテンプレートに相互接続した多数の埋込治療経路10で不快なだけである。1つの治療期間中に限られた数の治療経路が対応する数の送出経路36a、36bに相互接続され、必要ならば人間(使用者)の手を借りずに完全に分離させることもできる、という方式でテンプレート55はロボットアーム20に順次連結される。このように人間の手を借りずに分離できるのは、治療期間中の撮像という特殊な場面において非常に有利となる。
【0067】
ロボットアーム20・接続要素22とテンプレート55の正しい係合を可能とするため、連結要素220、55bが接続要素22とテンプレート55の双方に存在する。連結要素はロボットアーム20上に存在する電磁石220からなる。電磁石220は、参照番号55bで示すテンプレート55上の特定位置に位置決めされた適当な磁気接触要素と相互作用する。接続要素22がテンプレート55と正しく接続されると、電磁石220は対応する磁気接触要素55bと正しい磁気接触を起こして固定連結を生じることになる。
【0068】
更に、ロボットアーム20は、テンプレート55内への挿入治療経路の存在を検知するための複数の検知要素221a、221bを備えることができる。ロボットアーム20・接続要素22とテンプレート55の正しい係合を可能とするため、検知要素221a、221bは接続要素22とテンプレート55の双方に存在し、1対の発光要素(ダイオード)221a、221bと受光要素221b、221aとして構成してもよい。前記検知要素221a、221b対と治療経路のテンプレート内への挿入接続要素22との正しい相互作用によって、正しい信号が発生し、装置12の制御手段へ送られることになる。
【0069】
接続要素22がテンプレート55と正しく係合されない限り、検知要素2221a、221b間には相互作用が生じず、装置12の制御装置には信号が送られない。それゆえ、同定手段230と放射線駆動手段8a、8bの双方共に起動されることはなく、追跡要素及び/又は1つ以上のエネルギー放出源が送出経路から自由開放接続要素22に偶発的に前進し、このエネルギー放出源60a、60bの意図せぬ前進によって環境の危険な放射線被曝などの危険、不安状況に陥ることが回避される。
【0070】
ロボットアーム20・接続要素22とテンプレート55との正しい係合が一旦確立されると、この係合は電磁石220と磁気接触要素55bによって維持される。
【0071】
図9に開示されている場合には、高周波同定要素222が同定手段の一部となる。各高周波同定要素222は前記n本の中空治療経路の1つ又は送出経路の1つ付近のテンプレート55に搭載される。前記治療経路10の1つ付近の高周波同定要素222(又はRFID)は、追跡要素23aが追跡ワイヤ23と共に変位している間に前記相互接続治療経路10の1つに向かって装置12、前記送出経路36a〜36dの1本を通過することによって制御又は始動可能となる。このため、追跡要素23aは、例えば追跡要素23aの強磁性特性によって、ある種の磁気活性を示さねばならない。
【0072】
追跡要素23aの通過によって、RFID222の高周波放出特性が変化することになる。一実施例では、RFID222は通常、所謂『オフ』又は『サイレント』又は『低エネルギー』状態であるが、前記追跡要素23aが対応する中空治療経路10を変位する間に通過すると、『オン』に切り替わる。別の実施例では、RFID222は持続的に電磁エネルギーを放出し、その放出電磁エネルギー放出量が前記追跡要素23aの通過によって変化する。更に別の実施例では、既に放出しているRFID222が前記追跡要素の通過によって完全にオフに切り替わる。
【0073】
3つの状況すべてにおいて、放出された高周波の変化(『オフ』から『オン』、高から低、或いは『オン』から『オフ』)は、従来技術において公知である適当な手段を用いて検知可能であり、同定手段230による同定に利用可能である。
【0074】
更なる実施例では、同定手段は、追跡要素23aに部分的に組み込まれてもよい。この実施例では、加速度計センサ及び/又はジャイロスコープセンサを利用する。加速時計は追跡要素23aが送出経路をある方向へ変位している間その加速度を測定し、ジャイロスコープセンサは加速度及び回転変化を信号に変換する。
【0075】
本実施例を用いれば、追跡要素の新しい位置決めを正しく行って、放射線治療の精度を改善し、送出経路と1本以上の治療経路との不正な相互接続による治療過誤を回避する。
【0076】
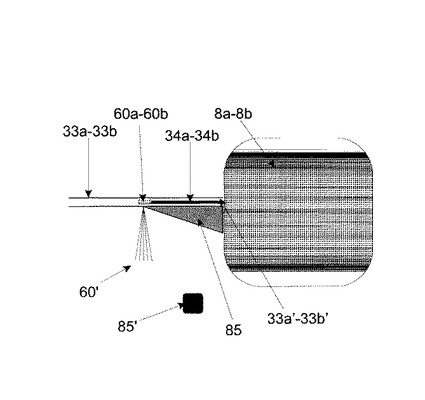
図10A及び10Bには、本発明による装置の特定の特徴を持つ更なる実施例が開示される。本実施例では、エネルギー放出源同定手段85、85’がソース経路33a、33bと放射線駆動手段8a、8bのエネルギー放出源の放射線遮蔽保管庫との各接続点に存在する。エネルギー放出源同定手段は、各放射線駆動手段8a、8bの出口開口33a’、33b’の近接部分に搭載された楔形要素85を有する。
【0077】
通常、本発明の装置で使用されるエネルギー放出源60a、60bは、持続的放出源、例えば、放射性線源(HDR又はPDR線源)と考えられる。前記放射線駆動手段8a、8bなどの1つが不正始動する可能性を回避するため、つまり、事前計画した目標放射線治療のために不正なエネルギー放出源が使用されることないように、エネルギー放出源60a、60bの放出する放射線60’は、放射線駆動手段8a、8bの放射線遮蔽保管庫を離れるや否や、直接監視される。
【0078】
このため、楔形要素85aは、放射線吸収材、例えば、鉛から製造し、線量分布を図10Bに示す放射線検出器85’によって検出する。エネルギー放出源60a、60bが放射線駆動手段8a、8bを離れて楔形遮蔽要素85に沿ってソース経路33a、33bを変位中に生じる検出線量分布から、前進中の線源60a、60bのエネルギー特性が正しく同定される。この測定方法を用いれば、ソース経路33a、33bを前進中のエネルギー放出源60a、60bを早期に同定し、不正な線源60a、60bがロボットアーム22に向かって装置12を前進するときに早期に正しく修正することができる。従って、環境(及び患者)への危険状況を回避すると共に、治療対象の患者への不正なエネルギー投与を回避することができる。
【図面の簡単な説明】
【0079】
【図1】従来技術による装置を示す図である。
【図2】本発明による装置の一実施例を示す図である。
【図3a】図2の装置の詳細ではあるが概略的な図である。
【図3b】図2の装置の詳細ではあるが概略的な図である。
【図4】本発明による装置の別の実施例の詳細ではあるが概略的な図である。
【図5】本発明による装置の別の実施例の詳細ではあるが概略的な図である。
【図6a】本発明による装置の別の実施例を示す図である。
【図6b】本発明による装置の別の実施例を示す図である。
【図7】本発明による装置の別の実施例を示す図である。
【図8】本発明による装置の別の実施例を示す図である。
【図9】本発明による装置の更に別の実施例を示す図である。
【図10a】本発明による装置の更に別の実施例を示す図である。
【図10b】ソース経路の変位と検出器信号との関係を示す図である。
【技術分野】
【0001】
本発明は、動物体の事前選択された解剖学的部分に対して放射線治療を行う装置に関する。この装置は、前記事前選択された解剖学的部分の1箇所以上の事前計画位置に挿入されるn本の中空治療経路からなる一群と、mを2以上、nを1以上として、前記n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路からなる一群と、追跡経路に収容され、前記相互接続されたm本の送出経路とm本の治療経路のそれぞれを経由して前記追跡経路から変位するように構成された追跡要素を有し、前記m本の送出経路のどれが前記n本の中空治療経路のどれに接続しているかを同定するための同定手段と、k≦mなるk個のエネルギー放出源を対応するソース経路に保管するための保管手段と、前記k個のエネルギー放出源をそれぞれのソース経路から前記相互接続されたm本の送出経路とm本の治療経路のうちの対応する1本を経由して前記解剖学的部分内の前記事前計画位置の1つに向かって一時的に挿入するための送出手段と、前記m本の送出経路の少なくとも1本を対応する1本の治療経路に連結するための連結手段とを備える。
【0002】
本発明はまた、動物体の事前選択された解剖学的部分に対して放射線治療を行う方法に関する。この方法は、i)前記事前選択された解剖学的部分の1箇所以上の位置にn本の中空治療経路からなる一群を挿入する工程と、ii)前記n本の中空治療経路からなる一群を固定位置決め接続テンプレートのn個の接続位置からなる一群と永続的に接続する工程と、iii)m本の送出経路からなる一群を前記テンプレートのn本の接続位置からなる一群のうちのm本に接続する工程と、iv)k個のエネルギー放出源をそれぞれ前記m本の送出経路及び相互接続されたn本の治療経路のうちの1本を経由して前記事前選択された解剖学的部分内の1つ以上の位置に向かって挿入する工程からなる。
【背景技術】
【0003】
遠隔アフタローダは、概して癌治療分野で使用され、特定時間だけ特定距離だけガンマ放射線放出源を収容した可撓性ワイヤを正確に進退させる装置である。遠隔アフタローダは、放射線放出源のための放射線遮蔽筺体の他に、テスト用の可撓性シミュレーションワイヤと、ガンマ放射線放出源を有する可撓性ワイヤと、2つのタイプのワイヤを操作するための特定制御及び移動機構とからなる。
【0004】
典型的には、治療場所への1本以上のカテーテルや針や他の閉経路(以下「治療経路」又は「治療針」)が患者内に位置決めされる。その後、治療経路はアフタローダに装着される。アフタローダは、線源保管庫から相互接続された送出経路及び前記送出経路に接続した治療経路を通して移動ワイヤ端の放射線源を前進させる。移動ワイヤはソースワイヤとも称される。
【0005】
続いてエネルギー放出源を相互接続した送出経路・治療経路経由で腫瘍内の数カ所に位置決めする。正しい治療放射線量を腫瘍に送出するために、この位置決めは治療計画システムによって計算された所定の順序に従って行われる。
【0006】
現在用いられている放射線(エネルギー)放出源は放射性線源である。この線源は、自然放射能性崩壊の原理に従ってガンマ放射線を持続的に放出するもので、使用放射性物質の固有半減期に特徴を持つ。このような治療に使用される線源は治療を実施する使用者(医者、物理学者、看護士など)に危険をもたらす。したがって、アフタローダは、専門技術者への被爆を最小に、或いは、一切被爆させることなく放射性線源を患者に挿入するために使用される。
【0007】
これらのアフタローダ装置は、治療を実施する使用者が患者から離れた所まで移動もしくは治療室を退室後に、患者に放射性線源を挿入することができる。換言すれば、放射性線源は、使用者が患者から離れた後、治療のために患者に装着される。そのためこのような装置は一般に「遠隔アフタローダ装置」と称される。
【発明の開示】
【発明が解決しようとする課題】
【0008】
近接照射療法を用いて大きな腫瘍を治療する必要がある場合、患者体(従って治療すべき腫瘍)内に挿入使用される中空針の数は大きなものとなりうる。腫瘍内に挿入する治療経路の数が増えるに従って、治療経路と送出経路との接続を間違える危険性は増し、その結果、誤実施を生じる。
【0009】
このため、治療経路及び相互接続した送出経路の同定を行って、事前計画された治療計画に従って腫瘍内の正確な位置に正しい送出経路と治療経路を経由して正しい線源を位置決めする。
【0010】
これらの従来装置の欠点は、ダミーが次の治療経路を照合した後でなければ線源を保管手段から送出経路・治療経路に移動できないという点である。このため、治療経路の数が多ければ待ち時間が多くなり、患者に対する平均治療時間が伸びてしまう(それゆえ不快感が増加する)。
【0011】
前述システムの更なる欠点は、患者が多数の治療経路に永続的に接続されており、治療計画に従って治療経路が送出経路に正しく接続されているかどうかを追跡要素(ダミー線源)が自動的に検知できないことである。
【0012】
上述の装置例は、本出願人名義の未発行ヨーロッパ特許出願第05076645.0号明細書に開示されている。
【0013】
本発明は、より安全でより効果的な治療を可能とし、治療過誤の危険を減じ、患者の不快感を最小化する、上述の序文に記載の装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明によれば、更に、連結手段の1つの連結位置だけで、k個のエネルギー放出源を択一的かつ同時に、m本の送出経路に接続したm本の治療経路からなる第1群に対してm本の送出経路経由で挿入可能となるように送出経路接続手段が構成される。なお、m本の送出経路とm本の治療経路は同定手段によって事前に照合される。
【0015】
これによって、複数のソース経路を正しく選択して追跡経路と共に1本以上の送出経路に正しく相互接続することが可能となる。その結果、複数のエネルギー放出源を前記特定の送出経路経由で患者体内に一時的に設置でき、事前計画された治療処置の順序で次の治療経路を正しく同定し同時に照合して、待ち時間を全体として減少できる、より多目的な装置となる。
【0016】
更にまた、この結果患者に与える不快感は減じられる。
【0017】
より具体的には、送出経路接続手段は円筒形要素を有し、円筒形要素はその縦軸を中心に回転可能であり、溝を有し、各溝は、前記ソース経路の1つ或いは前記追跡経路のどちらか一方に前記m本の送出経路の1つを相互接続させる。
【0018】
好適な一実施例では、前記溝の少なくとも2つは直線溝として成形される。また、他の実施例では、前記直線溝は互いに直交する。
【0019】
また、更なる実施例では、少なくとも1つの更なる溝が曲線溝として成形される。これにより、1本以上のソース経路が追跡経路と共に複数の送出経路・治療経路と素早く且つ多目的に同時相互接続され、(前記治療経路から複数のエネルギー放出源を挿入することによって)複数の治療処置を行い、次の治療時のために別の送出経路・治療経路を正しく同定することが可能となる。
【0020】
その結果、治療処置の速度を上げ、患者への不快感を軽減することになる。
【0021】
より具体的には、前記少なくとも1つの曲線溝は円筒周面の1/4を示す。
【0022】
一実施例では、前記溝は、回転の縦軸と垂直に延伸する前記円筒形要素の一端面に設けられる。また、別の実施例では、前記溝は、回転の縦軸とほぼ並行に延伸する前記円筒形要素の周面に設けられる。
【0023】
別の多目的な実施例では、送出経路接続手段は横方向に変位可能な移動要素を有し、前記移動要素には、前記m本の送出経路の1つを前記ソース経路の1つ或いは前記追跡経路のどちらか一方に相互接続する溝が設けられる。
【0024】
より具体的には前記溝は直線溝として成形される。また、前記溝は前記要素の横方向変位を考慮して傾斜している。
【0025】
本発明による装置の正確で安全な動作のために、前記m本の送出経路をそれぞれ前記対応するm本の中空治療経路の1本に接続するために接続手段が存在する。
【0026】
より具体的には、前記連結手段は、前記m本の送出経路を搬送するロボットアームを有し、前記ロボットアームはその自由端に連結要素を有する。前記連結要素は、前記n本の中空治療経路の群が接続されるテンプレートに係合するように構成される。
【0027】
動作誤差を最小化し、複数のエネルギー放出源を用いた治療処置を行う上で安全な環境を改善するために、連結手段は、連結要素上に存在する少なくとも1つの起動可能検知要素を有する。
【0028】
好適な一実施例では、検知要素は1対の発光要素と受光要素からなる。また、別の実施例では、連結手段は、治療中に連結要素とテンプレートとの連結を維持するために連結要素上に存在する少なくとも1つの電磁石を有する。
【0029】
本発明による装置の好適な一実施例では、k=2及びm=4である。
【0030】
本発明による方法は更に、工程iii)が、v)m本の送出経路を、治療経路に接続されたテンプレートの前記n個の接続位置からなる一群のうちの別のm個の位置に選択的かつ択一的に接続する工程を含むことを特徴とする。
【0031】
本発明は、また、放射線遮蔽区画に収容され、動物体の事前選択された解剖学的部分内の1つの位置に1つの挿入経路経由で挿入されるように構成されたエネルギー放出源を分類する方法にも関する。この方法は、a)前記エネルギー放出源を遮蔽要素を用いて前記放射線遮蔽区画から前記挿入経路経由で一定距離だけ変位させる工程と、b)前記一定距離の変位中に当該距離上の異なる位置において前記放射線放出源から送出される線量を検出する工程と、c)当該距離上の前記異なる位置における線量を判定する工程と、d)前記判定線量計測値を1つ以上の事前決定され記憶された線量−距離曲線と比較する工程とからなる。
【発明を実施するための最良の形態】
【0032】
付属図面を参照して本発明を説明する。
【0033】
明瞭にするために、以下の詳細な説明では、図面に示した対応する部分は同一参照番号で表示される。
【0034】
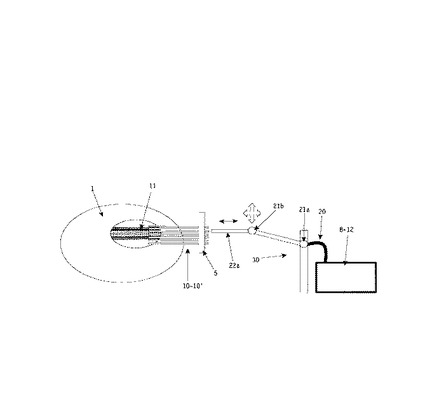
図1には、EP05076645.0に開示された従来技術による装置の具体的な一実施例が示されている。治療装置12は、治療計画ユニット12と放射線送出又は駆動手段8を有する。放射線送出又は駆動手段8は、接続要素22を備えたロボットアームに接続された搬送チューブ20を有する。接続要素22は、選択した治療経路10の近位端10aに連絡可能である。治療経路10は、テンプレート5を用いて、患者体1内部の事前選択された目標組織11、例えば、前立腺に挿入される。テンプレート5は別途患者体に接続される。
【0035】
接続要素22は、放射線駆動手段8に接続している送出経路の挿入口内に伸びる貫通孔を備える。接続要素22がテンプレート5及び中空針10の露出端10aに整列接触するまで、ロボットアームの移動は監視、操作される。それに続く追跡ワイヤ(図示せず)は、送出経路経由で、接続要素22に相互接続した中空針10に向かって誘導される。追跡ワイヤの遠位端には追跡要素が存在する。追跡要素は、好適には、電磁追跡要素である。
【0036】
選択した中空針10を経由した電磁追跡要素の変位は、EP05076645.0に記載の適当な手段を用いて再現することができる。得られた情報は中空針10の実際の姿勢を表現しており、この再現された姿勢や位置は、放射線治療を行う時に患者体内に挿入すべき複数の中空針10、10’などの事前計画姿勢と比較される。
【0037】
続いて、追跡要素を有する追跡ワイヤを中空針10から治療装置8、12内に引き戻す。放射線治療処置を実施するために、遠位端にエネルギー放出源(HDR又はLDR線源)を有する誘導又はソースワイヤを接続要素22及び中空針10経由で前進させる。
【0038】
続いて、誘導ワイヤ及びエネルギー放出源を治療装置8、12内に引き戻し、接続要素22をテンプレート5・針10から切り離し、患者体1内部の異なる位置に挿入した別の中空針10’に対して整列させる。
【0039】
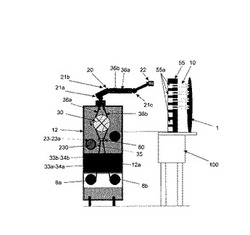
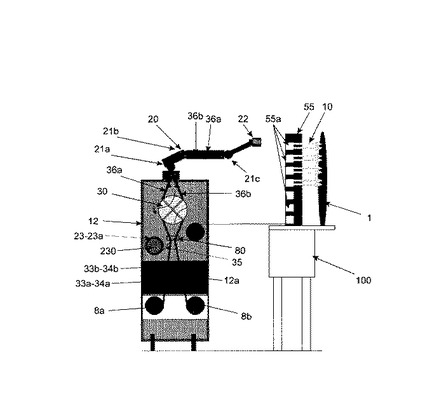
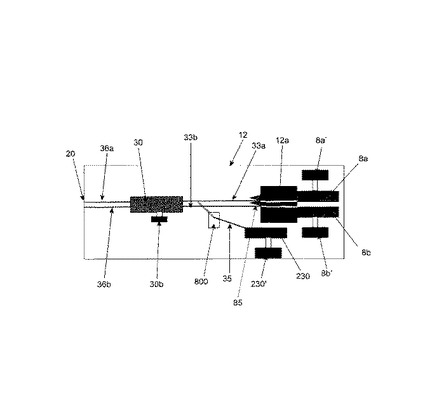
本発明の装置の第1実施例が図2に示される。本装置は筺体12に収容した複数のエネルギー放出源を操作可能である。本実施例では2つの線源を使用するが、3以上の線源を導入することも可能である。各エネルギー放出源60a、60bは対応するソースワイヤ34a、34bに搭載され、対応するソース経路33a、33bに収容され、遮蔽12aに保管される。線源60a、60bは、適当な放射線駆動手段8a、8b(変位手段)によって本装置から患者に対して進退させることができる。
【0040】
図1の従来技術と同様、図2の実施例には、送出経路36a、36bのどの経路が患者体1に位置決めされた治療経路10の1つに接続されているかを正確に同定するために、追跡経路35に収容した追跡ワイヤ23に接続した追跡要素23aを有する同定手段230が設けられる。
【0041】
図1の実施例には、埋め込まれた治療経路10、10’などのそれぞれにロボットアーム20を用いて順次接続される1つの送出経路が設けられているが、図2の実施例のロボットアームには、複数の治療経路又は埋込針10を患者体1内に配置するテンプレート55にロボットアーム20の接続要素22を用いて相互接続される少なくとも2本の送出経路36a、36bが設けられる。
【0042】
それゆえ、図2の実施例には、遮蔽12aを用いて装置12に安全に装着した対応するエネルギー放出源送出手段8a、8bにそれぞれ接続した少なくとも2つのソース経路33a、33bが設けられる。放射線駆動手段8a、8bからはエネルギー放出源60a、60b(本図には図示していないが、図8には図示)は、適当なソースワイヤ34a、34bを用いてソース経路33a、33b内を進退させることができる。同様に、同定手段230は追跡経路35に収容した追跡ワイヤ23を有する。この追跡ワイヤ23はその自由遠位端に追跡要素23aを備える。
【0043】
図2の装置12が正しく動作するために、前記ソース経路33a、33bの1つ以上を前記送出経路36a、36bの1つに正しく相互接続させるための所謂ソース経路接続手段30が設けられる。更に又、追跡経路35を別の前記送出経路36a、36bに同時接続するように送出経路接続手段30を構成する。
【0044】
換言すれば、図2に示す本発明の装置12は、追跡経路35を2つの送出経路36a、36bに接続し、2つのソース経路33a、33bを2つの送出経路36a、36bに同時に接続するか、ソース60a、60bの待ち時間を生じる照合手順後には2つの送出経路36a、36bに二者択一的に接続するか、同一接続位置でありながら2つの接続状態を二者択一的にのみ可能とする(本図には図示していないが、図8には図示)。
【0045】
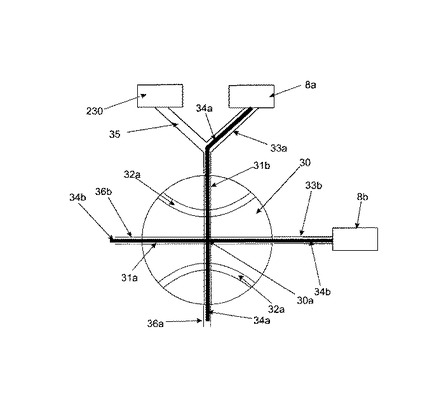
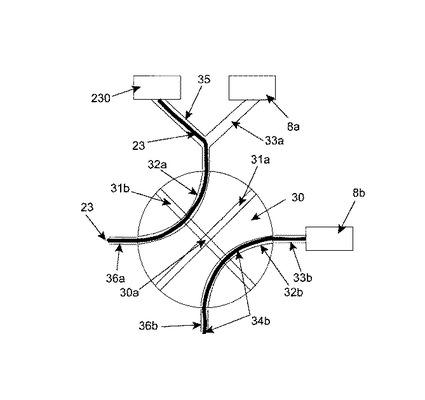
図3A及び3Bには、送出経路接続手段30の第1実施例が示される。図3A及び3Bの実施例では、送出経路接続手段は円盤形要素として成形され、その縦軸30aを中心に回転可能である。このディスク30は溝31a、31b及び32a、32bを備える。各溝は、前記送出経路36a、36bの1本をソース経路33a、33bの1本又は追跡経路35のどちらか一方に相互接続可能である。図3A、3Bに明瞭に示すように、前記溝31a、31bの少なくとも2本は直線溝として成形される。これらの直線溝は本実施例では互いに直交する。別の実施例では、前記溝32a、32bの少なくとも1本は好適には1/4曲率を示す曲線溝として成形される。
【0046】
図3Aに示す第1動作状態では、円筒形接続要素30は、直線溝31aが放射線駆動装置8bのソース経路33bを送出経路36bに相互接続させるように位置決めされる。これによって、ソースワイヤ34bと前記放射線駆動手段8bに収容したエネルギー放出源60b(本図には図示しないが、図8には図示)はソース経路33b、相互接続溝又は経路31a経由で送出経路36bに向かって前進可能になる。同様に、相互接続溝又は経路31bは、ソース経路33aを送出経路36aに相互接続し、ソースワイヤ34aとエネルギー放出源60b(図示せず)が放射線駆動手段8aから送出経路36aに向かって前進可能になる。
【0047】
図2の装置は、追跡経路を2つの送出経路及び2つのソース経路に同時に接続するか、ソース60a、60bの待ち時間を生じる照合手順中には2つの送出経路に二者択一的に接続するか、同一接続位置でありながら2つの接続状態を二者択一的にのみ可能とする。
【0048】
図3Bでは、送出経路接続手段・円筒形要素30はその縦軸30aを中心に45°以上回転し、2つの直線溝31a、31bをソース経路33a、33b及び送出経路36a、36bの1つと整列させない。しかし、円盤形要素30の回転変位によって、今度は曲線溝32a、32bがソース経路33a−追跡経路35(送出経路36aを含む)及びソース経路33b(送出経路36bを含む)とそれぞれ整列する。
【0049】
この動作状態では、今度は放射線駆動手段8bのエネルギー放出源60b(図示せず)がソースワイヤ34bを用いてソース経路33b経由で他方の送出経路36bに向けて前進される。同時に、追跡経路35は曲線溝32a経由で一方の送出経路36aと相互接続されており、送出経路36aによる追跡ワイヤ23(追跡要素23aを含む)の前進が可能となっている。
【0050】
この動作状態で、放射線駆動手段8bを用いて1つの放射線処置が実施可能となるが、同時に、今度は追跡要素23aを用いて別の治療経路を同定してエネルギー放出源を患者体内まで挿入可能となる。
【0051】
図7及び8には、送出経路接続手段の別の実施例が開示されるが、今度は参照番号300で示される。本実施例では、送出経路接続手段は更に、その縦軸300aを中心に回転可能な回転可能接続要素を含む。回転可能接続要素は、入口端面301aと出口端面301bを有する。図7及び8の実施例は、縦軸300aにほぼ平行に延びる複数の溝が存在する周面301cを持つ円筒形要素300を構成する。
【0052】
図7Aの実施例では2つの縦方向に延びる溝31a、31bが存在するが、図7Bの実施例では4つの溝31a、31b、32a、32bが存在する。円筒形の経路接続要素300が縦軸300aに沿って回転すると、1つ以上の動作状態で溝31a、31b、32a、32bはその入口端面301aにおいて前記ソース経路33a、33bの1つ及び追跡経路35と整列可能となる一方、溝31a、31b、32a、32bはその出口端面301bにおいて前記送出経路36a、36dの1つと整列可能となる(図8A、8Bを参照)。
【0053】
図8A、8Bで分かるように、円筒経路接続要素300の回転姿勢によって、前記ソース経路33a、33bの1つ又は追跡経路35から前記送出経路36a、36bの1つに向かって追跡ワイヤ23のソースワイヤ34a、34bを誘導して、対応するエネルギー放出源60a、60b又は追跡要素23aを、患者体内に埋め込まれ、対応する送出経路36a〜36dに相互接続した目標治療経路に向かって前進させることが可能となる。
【0054】
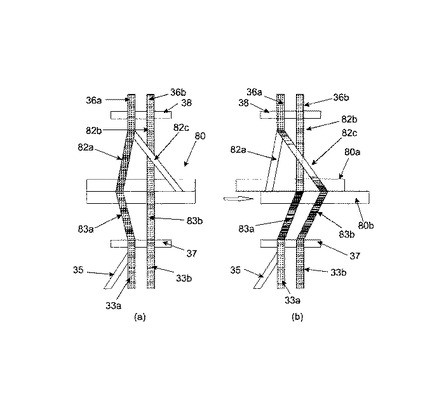
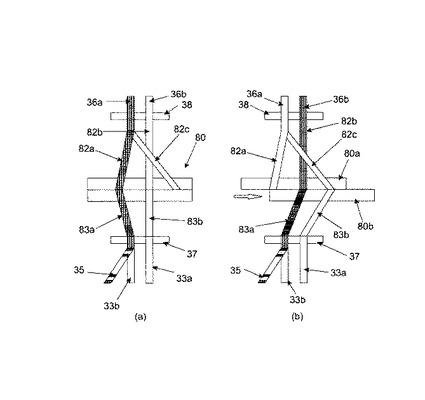
図4及び5には、本発明による送出経路接続手段の代替実施例が開示される。本実施例では、送出経路接続手段は移動要素80として構成される。移動要素80は、横方向(ソース経路33a、33b及び/又は追跡経路35の方位に垂直)に変位可能である。移動要素80には、移動要素の横方向変位によって送出経路36a、36bなどの1つをソース経路33a、33bの1つ又は追跡経路35に相互接続可能な溝又は経路が設けられる。移動要素80は2つの要素部分80a、80bからなる。要素部分80aは固定的に位置決めされる。要素部分80bは固定要素部分80aに対して横方向変位可能である。しかし、別の実施例では、要素部分80bを固定的に位置決めして、他方の要素部分80aが横方向変位可能であってもよいことは明らかであろう。
【0055】
要素部分80aには、本実施例では、3つの出口溝又は経路82a、82b、82cが設けられる。出口溝82a、82cは接続ブロック38経由で送出経路36aに接続されるが、出口溝82bは接続ブロック38経由で他方の送出経路36bに接続される。移動要素部分80bには、同様に、2つの入口溝又は経路83a、83bが設けられる。入口溝83a、83bは接続ブロック37を用いて、ここでは2つのソース経路33a、33b及び1つの追跡経路35に相互接続される。
【0056】
図4A、4B及び5A、5Bには4つの動作状態が示される。図4Aでは入口経路83a、83bが出口経路82a、82bに相互接続して、エネルギー放出源(図示せず)60a、60bをソース経路33a、33b経由で送出経路36a、36bに前進可能にする。
【0057】
図4Bの動作状態では、移動要素部分80bを横方向(右)に移動させ、入口経路83bを出口経路82c(及び送出経路36aを含むソース経路33b)に相互接続すると共に、入口経路83bを出口経路82b(及び送出経路36bを含むソース経路33a)に相互接続する。この動作状態では、ソース経路33a、33bと送出経路36a、36bとの相互接続は、図4Aの動作状態に対して移動又は切り換えられている。
【0058】
図5Aの動作状態(図4Aの状態に相当)では、正しい送出経路36a及び相互接続(図示せず)治療経路を同定するために、追跡経路35は、追跡要素を同定手段230(図2を参照)から入口経路83a、出口経路82aを経て送出経路36aへ前進させるのに使用される。図5Bの動作状態(図4Bの状態に相当)では、再度同定のために、追跡要素23aを追跡経路35から他方の送出経路36bへ前進させることができる。
【0059】
図6A及び6Bには、本発明による装置12の更に2つの実施例がより概略的に示されるが、これらは図2の実施例とほぼ同じ技術特徴を有する。図6A及び6Bの実施例は、更なる移動要素800が送出経路接続手段の一部となるという追加特徴を有する。前記更なる移動要素800は、図4、5の切替要素80の簡素化版であり、図6Aの実施例では追跡経路35に接続して切替要素30、30’に接続する1つの入口経路83aを有する。
【0060】
図6Bの実施例では、少なくとも2つのエネルギー放出源を用いる。エネルギー源はそれぞれ、遮蔽12aに収容され、放射線駆動手段8a、8b(図6Aの実施例と同様)によって変位される。更に、同定手段230に収容した1つの追跡要素23aを用いる。しかし、本実施例では、4本の送出経路36a〜36dが用いられ、ロボットアーム20(図2)を用いて患者体内に埋め込まれた対応する治療経路に相互接続される。前記送出経路36a〜36dの1つをソース経路33a、33bの1つ及び追跡経路35に対して正しく選択可能とするため、図3A〜3B(又は図4〜5、7〜8)に示すような2つの経路接続要素を移動要素と組み合わせて使用する。
【0061】
この図6Bの実施例にも、図4〜5の切替要素の簡素化版である移動要素800が使用される(図6Aに加えて示す)。移動要素800は、追跡経路35に接続した1つの入口経路83aを有し、切替要素30、30’に接続している。
【0062】
図6A〜6Bの2つの簡素化した移動要素800は、追跡経路35をソース経路33a、33b、33c、33dのどれか1つに(つまり、切替要素30、30’の一方に)相互接続するように駆動手段800’(要素部分80bの横方向に変位)によって操作可能である。同様に、各切替要素30、30’は、動作手段30b、30b’を用いて操作可能である。この操作は、例えば、図3A〜3Bの円盤形切替要素を回転させることによって、或いは、図7〜8の円筒切替要素を回転させることによって、或いは、図4〜5の切替要素を用いて行われる。各切替要素30、30’は、それぞれ送出経路36a〜36b又は36c〜36dのどちらか一方を選択するために使用される。
【0063】
図6A〜6Bの実施例を図3a〜3b、図4〜5或いは図7〜8の実施例と組み合わせると、2つのエネルギー放出源60a、60b(本図には図示していないが、図8に図示)をそれぞれのソース経路33a、33b及び追跡経路35経由で送出経路36a、36b(36a、36b)の方向に前進させることができる。この場合、送出経路接続手段30は、送出経路36a〜36dに択一的に接続でき、2つのエネルギー放出源60a、60b(本図ではなく図8に図示)を送出経路36a、36bのどちらか一方に同時且つ二者択一的に挿入可能である。
【0064】
同時に、追跡要素23aは、テンプレート55に対する(ロボットアーム20の)接続要素22の1つの接続位置において全ての送出経路36a〜36dを照合するように変位させることができる。まず、送出経路36a、36bが照合・同定される。その後、線源60a、60bがこの照合された送出経路36a、36bに挿入されると同時に、追跡ワイヤ23は切替要素80を送出経路36c、36dに切り替えて移動する。
【0065】
図9にはロボットアーム20の接続要素22の一実施例が開示される。この接続要素は、複数の中空治療経路10が接続したテンプレート55に係合するように構成される。テンプレート55には、従って、適当な連結部品10cを用いて複数の治療経路10(埋込針)を収容可能な複数の溝又は孔55aが設けられる。この治療経路10は患者体1内に埋め込まれる。
【0066】
接続要素22はテンプレート55から取り外し可能になっており、少なくとも2つの送出経路36a、36bを備えたロボットアーム20を対応する埋込治療経路10に順次相互接続可能である。それゆえ、患者10は、埋込治療経路(埋込針)10と同数の多数の送出経路によって本発明の装置12と相互接続されることが回避される。患者は、好適には治療台に固定したテンプレートに相互接続した多数の埋込治療経路10で不快なだけである。1つの治療期間中に限られた数の治療経路が対応する数の送出経路36a、36bに相互接続され、必要ならば人間(使用者)の手を借りずに完全に分離させることもできる、という方式でテンプレート55はロボットアーム20に順次連結される。このように人間の手を借りずに分離できるのは、治療期間中の撮像という特殊な場面において非常に有利となる。
【0067】
ロボットアーム20・接続要素22とテンプレート55の正しい係合を可能とするため、連結要素220、55bが接続要素22とテンプレート55の双方に存在する。連結要素はロボットアーム20上に存在する電磁石220からなる。電磁石220は、参照番号55bで示すテンプレート55上の特定位置に位置決めされた適当な磁気接触要素と相互作用する。接続要素22がテンプレート55と正しく接続されると、電磁石220は対応する磁気接触要素55bと正しい磁気接触を起こして固定連結を生じることになる。
【0068】
更に、ロボットアーム20は、テンプレート55内への挿入治療経路の存在を検知するための複数の検知要素221a、221bを備えることができる。ロボットアーム20・接続要素22とテンプレート55の正しい係合を可能とするため、検知要素221a、221bは接続要素22とテンプレート55の双方に存在し、1対の発光要素(ダイオード)221a、221bと受光要素221b、221aとして構成してもよい。前記検知要素221a、221b対と治療経路のテンプレート内への挿入接続要素22との正しい相互作用によって、正しい信号が発生し、装置12の制御手段へ送られることになる。
【0069】
接続要素22がテンプレート55と正しく係合されない限り、検知要素2221a、221b間には相互作用が生じず、装置12の制御装置には信号が送られない。それゆえ、同定手段230と放射線駆動手段8a、8bの双方共に起動されることはなく、追跡要素及び/又は1つ以上のエネルギー放出源が送出経路から自由開放接続要素22に偶発的に前進し、このエネルギー放出源60a、60bの意図せぬ前進によって環境の危険な放射線被曝などの危険、不安状況に陥ることが回避される。
【0070】
ロボットアーム20・接続要素22とテンプレート55との正しい係合が一旦確立されると、この係合は電磁石220と磁気接触要素55bによって維持される。
【0071】
図9に開示されている場合には、高周波同定要素222が同定手段の一部となる。各高周波同定要素222は前記n本の中空治療経路の1つ又は送出経路の1つ付近のテンプレート55に搭載される。前記治療経路10の1つ付近の高周波同定要素222(又はRFID)は、追跡要素23aが追跡ワイヤ23と共に変位している間に前記相互接続治療経路10の1つに向かって装置12、前記送出経路36a〜36dの1本を通過することによって制御又は始動可能となる。このため、追跡要素23aは、例えば追跡要素23aの強磁性特性によって、ある種の磁気活性を示さねばならない。
【0072】
追跡要素23aの通過によって、RFID222の高周波放出特性が変化することになる。一実施例では、RFID222は通常、所謂『オフ』又は『サイレント』又は『低エネルギー』状態であるが、前記追跡要素23aが対応する中空治療経路10を変位する間に通過すると、『オン』に切り替わる。別の実施例では、RFID222は持続的に電磁エネルギーを放出し、その放出電磁エネルギー放出量が前記追跡要素23aの通過によって変化する。更に別の実施例では、既に放出しているRFID222が前記追跡要素の通過によって完全にオフに切り替わる。
【0073】
3つの状況すべてにおいて、放出された高周波の変化(『オフ』から『オン』、高から低、或いは『オン』から『オフ』)は、従来技術において公知である適当な手段を用いて検知可能であり、同定手段230による同定に利用可能である。
【0074】
更なる実施例では、同定手段は、追跡要素23aに部分的に組み込まれてもよい。この実施例では、加速度計センサ及び/又はジャイロスコープセンサを利用する。加速時計は追跡要素23aが送出経路をある方向へ変位している間その加速度を測定し、ジャイロスコープセンサは加速度及び回転変化を信号に変換する。
【0075】
本実施例を用いれば、追跡要素の新しい位置決めを正しく行って、放射線治療の精度を改善し、送出経路と1本以上の治療経路との不正な相互接続による治療過誤を回避する。
【0076】
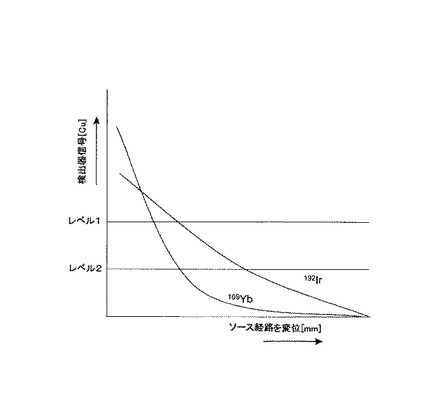
図10A及び10Bには、本発明による装置の特定の特徴を持つ更なる実施例が開示される。本実施例では、エネルギー放出源同定手段85、85’がソース経路33a、33bと放射線駆動手段8a、8bのエネルギー放出源の放射線遮蔽保管庫との各接続点に存在する。エネルギー放出源同定手段は、各放射線駆動手段8a、8bの出口開口33a’、33b’の近接部分に搭載された楔形要素85を有する。
【0077】
通常、本発明の装置で使用されるエネルギー放出源60a、60bは、持続的放出源、例えば、放射性線源(HDR又はPDR線源)と考えられる。前記放射線駆動手段8a、8bなどの1つが不正始動する可能性を回避するため、つまり、事前計画した目標放射線治療のために不正なエネルギー放出源が使用されることないように、エネルギー放出源60a、60bの放出する放射線60’は、放射線駆動手段8a、8bの放射線遮蔽保管庫を離れるや否や、直接監視される。
【0078】
このため、楔形要素85aは、放射線吸収材、例えば、鉛から製造し、線量分布を図10Bに示す放射線検出器85’によって検出する。エネルギー放出源60a、60bが放射線駆動手段8a、8bを離れて楔形遮蔽要素85に沿ってソース経路33a、33bを変位中に生じる検出線量分布から、前進中の線源60a、60bのエネルギー特性が正しく同定される。この測定方法を用いれば、ソース経路33a、33bを前進中のエネルギー放出源60a、60bを早期に同定し、不正な線源60a、60bがロボットアーム22に向かって装置12を前進するときに早期に正しく修正することができる。従って、環境(及び患者)への危険状況を回避すると共に、治療対象の患者への不正なエネルギー投与を回避することができる。
【図面の簡単な説明】
【0079】
【図1】従来技術による装置を示す図である。
【図2】本発明による装置の一実施例を示す図である。
【図3a】図2の装置の詳細ではあるが概略的な図である。
【図3b】図2の装置の詳細ではあるが概略的な図である。
【図4】本発明による装置の別の実施例の詳細ではあるが概略的な図である。
【図5】本発明による装置の別の実施例の詳細ではあるが概略的な図である。
【図6a】本発明による装置の別の実施例を示す図である。
【図6b】本発明による装置の別の実施例を示す図である。
【図7】本発明による装置の別の実施例を示す図である。
【図8】本発明による装置の別の実施例を示す図である。
【図9】本発明による装置の更に別の実施例を示す図である。
【図10a】本発明による装置の更に別の実施例を示す図である。
【図10b】ソース経路の変位と検出器信号との関係を示す図である。
【特許請求の範囲】
【請求項1】
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置であって、
前記事前選択された解剖学的部分の1箇所以上の事前計画位置に挿入されるn本の中空治療経路からなる一群と、
mを2以上、nを1以上として、前記n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路からなる一群と、
追跡経路に収容され、前記相互接続されたm本の送出経路とm本の治療経路のそれぞれを経由して前記追跡経路から変位するように構成された追跡要素を有し、前記m本の送出経路のどれが前記n本の中空治療経路のどれに接続しているかを同定するための同定手段と、
k≦mなるk個のエネルギー放出源を対応するソース経路に保管するための保管手段と、
前記k個のエネルギー放出源をそれぞれのソース経路から前記相互接続されたm本の送出経路とm本の治療経路のうちの対応する1本を経由して前記解剖学的部分内の前記事前計画位置の1つに向かって一時的に挿入するための送出手段と、
前記m本の送出経路の少なくとも1本をn本の中空治療経路の少なくとも1本に連結するための連結手段とを備え、
更に、連結手段の1つの連結位置だけで、k個のエネルギー放出源及び/又は追跡要素を択一的かつ同時に、前記m本の送出経路に接続したm本の治療経路からなる第1群に対してm本の送出経路経由で挿入可能となるように送出経路接続手段が構成され、前記m本の送出経路及び前記m本の治療経路は同定手段によって事前に照合されたことを特徴とする装置。
【請求項2】
送出経路接続手段は円筒形要素を有し、円筒形要素はその縦軸を中心に回転可能であり、溝を有し、各溝は、前記ソース経路の1つ或いは前記追跡経路のどちらか一方に前記m本の送出経路の1つを相互接続させることを特徴とする、請求項1に記載の装置。
【請求項3】
前記溝の少なくとも2本は直線溝として成形されることを特徴とする請求項2に記載の装置。
【請求項4】
前記直線溝は互いに直交することを特徴とする請求項3に記載の装置。
【請求項5】
少なくとも1本の更なる溝が曲線溝として成形されることを特徴とする請求項2ないし4のいずれか1項に記載の装置。
【請求項6】
前記少なくとも1本の曲線溝は円筒周面の1/4を示すことを特徴とする請求項5に記載の装置。
【請求項7】
前記溝は、回転の縦軸と垂直に延伸する前記円筒形要素の一端面に設けられることを特徴とする請求項2ないし6のいずれか1項に記載の装置。
【請求項8】
前記溝は、回転の縦軸とほぼ平行に延伸する前記円筒形要素の周面に設けられることを特徴とする請求項2ないし6のいずれか1項に記載の装置。
【請求項9】
送出経路接続手段は横方向に変位可能な移動要素を有し、前記移動要素には、前記m本の送出経路の1つを前記ソース経路の1つ或いは前記追跡経路のどちらか一方に相互接続する溝が設けられることを特徴とする請求項1ないし8のいずれか1項に記載の装置。
【請求項10】
前記溝は直線溝として成形されることを特徴とする請求項9に記載の装置。
【請求項11】
前記溝は前記要素の横方向変位を考慮して傾斜していることを特徴とする請求項9又は10に記載の装置。
【請求項12】
前記連結手段は、前記m本の送出経路を搬送するロボットアームを有し、前記ロボットアームはその自由端に連結要素を有することを特徴とする請求項1ないし11のいずれか1項に記載の装置。
【請求項13】
前記連結要素は、前記n本の中空治療経路の一群が接続されるテンプレートに係合するように構成されることを特徴とする請求項12に記載の装置。
【請求項14】
連結手段は、連結要素上に存在する少なくとも1つの起動可能検知要素を有することを特徴とする請求項13に記載の装置。
【請求項15】
検知要素と連結要素は1対の発光要素と受光要素からなることを特徴とする請求項14に記載の装置。
【請求項16】
連結手段は、治療中に連結要素とテンプレートとの連結を維持するために連結要素上に存在する少なくとも1つの電磁石を有することを特徴とする請求項12ないし15のいずれか1項に記載の装置。
【請求項17】
k=2及びm=4であることを特徴とする請求項1ないし15のいずれか1項に記載の装置。
【請求項18】
同定手段は、更に、前記n本の中空治療経路の1つにそれぞれ搭載される多数の高周波同定要素を有し、各高周波同定要素は対応する中空治療経路を変位する前記追跡要素によって制御されることを特徴とする請求項1ないし17のいずれか1項に記載の装置。
【請求項19】
前記高周波同定要素は、対応する中空治療経路を変位する前記追跡要素によってスイッチが入れられることを特徴とする請求項18に記載の装置。
【請求項20】
高周波同定要素は連続的に電磁エネルギーを放出しており、前記電磁エネルギーの放出量は、対応する中空治療経路を変位する前記追跡要素によって変化することを特徴とする請求項18に記載の装置。
【請求項21】
高周波同定要素は、対応する中空治療経路を変位する前記追跡要素によってスイッチが切られることを特徴とする請求項20に記載の装置。
【請求項22】
追跡要素には少なくとも1つのジャイロスコープセンサ及び/又は少なくとも1つの加速度計センサが設けられることを特徴とする請求項1ないし21のいずれか1項に記載の装置。
【請求項23】
各保管手段に対して、前記保管手段に保管されたエネルギー放出源が対応するソース経路を変位する時にエネルギー放出源のエネルギー特性を同定するために前記対応するソース経路付近にエネルギー放出源同定手段を搭載することを特徴とする請求項1ないし22のいずれか1項に記載の装置。
【請求項24】
前記エネルギー放出源同定手段は、1対のエネルギー遮蔽要素とエネルギー検出要素からなり、前記遮蔽要素は少なくとも部分的にソース経路をエネルギー検出要素から遮蔽することを特徴とする請求項23に記載の装置。
【請求項25】
前記エネルギー遮蔽要素は楔形要素として構成されることを特徴とする請求項24に記載の装置。
【請求項26】
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置と共に使用するエネルギー放出源同定手段において、前記装置は、それぞれ放射線遮蔽保管手段に収容され、前記保管手段に接続された対応するソース経路を経て前記事前選択された解剖学的部分へ移動可能な、少なくとも2つのエネルギー放出源を有し、前記エネルギー放出源同定手段は1対のエネルギー遮蔽要素とエネルギー検出要素からなり、前記エネルギー遮蔽要素は少なくとも部分的にソース経路をエネルギー検出要素から遮蔽することを特徴とするエネルギー放出源同定手段。
【請求項27】
前記エネルギー遮蔽要素は楔形要素として構成されることを特徴とする請求項26に記載のエネルギー放出源同定手段。
【請求項28】
動物体の事前選択された解剖学的部分に対して放射線治療を行う方法であって、
i) 前記事前選択された解剖学的部分の1箇所以上の位置にn本の中空治療経路からなる一群を挿入する工程と、
ii) 前記n本の中空治療経路からなる一群を固定位置決め接続テンプレートのn個の接続位置からなる一群と永続的に接続する工程と、
iii) m本の送出経路からなる一群を前記テンプレートのn本の接続位置からなる一群のうちのm本に接続する工程と、
iv) k個のエネルギー放出源をそれぞれ前記m本の送出経路及び相互接続されたn本の中空治療経路のうちの1本を経由して前記事前選択された解剖学的部分内の1つ以上の位置に向かって挿入する工程からなり、前記方法は更に、工程iii)が、
v) m本の送出経路を、治療経路に接続されたテンプレートの前記n個の接続位置からなる一群のうちの別のm個の位置に選択的かつ択一的に接続する工程を含むことを特徴とする方法。
【請求項29】
請求項1ないし25のいずれか1項に記載の装置を用いる工程を更に備えていることを特徴とする請求項28に記載の方法。
【請求項30】
放射線遮蔽区画に収容され、動物体の事前選択された解剖学的部分内の1つの位置に1つの挿入経路経由で挿入されるように構成されたエネルギー放出源を分類する方法において、
a) 前記エネルギー放出源を遮蔽要素を用いて前記放射線遮蔽区画から前記挿入経路経由で一定距離だけ変位させる工程と、
b) 前記一定距離の変位中に当該距離上の異なる位置において前記放射線放出源から送出される線量を検出する工程と、
c) 当該距離上の前記異なる位置における線量を判定する工程と、
d) 前記判定線量計測値を1つ以上の事前決定され記憶された線量−距離曲線と比較する工程とからなる方法。
【請求項1】
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置であって、
前記事前選択された解剖学的部分の1箇所以上の事前計画位置に挿入されるn本の中空治療経路からなる一群と、
mを2以上、nを1以上として、前記n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路からなる一群と、
追跡経路に収容され、前記相互接続されたm本の送出経路とm本の治療経路のそれぞれを経由して前記追跡経路から変位するように構成された追跡要素を有し、前記m本の送出経路のどれが前記n本の中空治療経路のどれに接続しているかを同定するための同定手段と、
k≦mなるk個のエネルギー放出源を対応するソース経路に保管するための保管手段と、
前記k個のエネルギー放出源をそれぞれのソース経路から前記相互接続されたm本の送出経路とm本の治療経路のうちの対応する1本を経由して前記解剖学的部分内の前記事前計画位置の1つに向かって一時的に挿入するための送出手段と、
前記m本の送出経路の少なくとも1本をn本の中空治療経路の少なくとも1本に連結するための連結手段とを備え、
更に、連結手段の1つの連結位置だけで、k個のエネルギー放出源及び/又は追跡要素を択一的かつ同時に、前記m本の送出経路に接続したm本の治療経路からなる第1群に対してm本の送出経路経由で挿入可能となるように送出経路接続手段が構成され、前記m本の送出経路及び前記m本の治療経路は同定手段によって事前に照合されたことを特徴とする装置。
【請求項2】
送出経路接続手段は円筒形要素を有し、円筒形要素はその縦軸を中心に回転可能であり、溝を有し、各溝は、前記ソース経路の1つ或いは前記追跡経路のどちらか一方に前記m本の送出経路の1つを相互接続させることを特徴とする、請求項1に記載の装置。
【請求項3】
前記溝の少なくとも2本は直線溝として成形されることを特徴とする請求項2に記載の装置。
【請求項4】
前記直線溝は互いに直交することを特徴とする請求項3に記載の装置。
【請求項5】
少なくとも1本の更なる溝が曲線溝として成形されることを特徴とする請求項2ないし4のいずれか1項に記載の装置。
【請求項6】
前記少なくとも1本の曲線溝は円筒周面の1/4を示すことを特徴とする請求項5に記載の装置。
【請求項7】
前記溝は、回転の縦軸と垂直に延伸する前記円筒形要素の一端面に設けられることを特徴とする請求項2ないし6のいずれか1項に記載の装置。
【請求項8】
前記溝は、回転の縦軸とほぼ平行に延伸する前記円筒形要素の周面に設けられることを特徴とする請求項2ないし6のいずれか1項に記載の装置。
【請求項9】
送出経路接続手段は横方向に変位可能な移動要素を有し、前記移動要素には、前記m本の送出経路の1つを前記ソース経路の1つ或いは前記追跡経路のどちらか一方に相互接続する溝が設けられることを特徴とする請求項1ないし8のいずれか1項に記載の装置。
【請求項10】
前記溝は直線溝として成形されることを特徴とする請求項9に記載の装置。
【請求項11】
前記溝は前記要素の横方向変位を考慮して傾斜していることを特徴とする請求項9又は10に記載の装置。
【請求項12】
前記連結手段は、前記m本の送出経路を搬送するロボットアームを有し、前記ロボットアームはその自由端に連結要素を有することを特徴とする請求項1ないし11のいずれか1項に記載の装置。
【請求項13】
前記連結要素は、前記n本の中空治療経路の一群が接続されるテンプレートに係合するように構成されることを特徴とする請求項12に記載の装置。
【請求項14】
連結手段は、連結要素上に存在する少なくとも1つの起動可能検知要素を有することを特徴とする請求項13に記載の装置。
【請求項15】
検知要素と連結要素は1対の発光要素と受光要素からなることを特徴とする請求項14に記載の装置。
【請求項16】
連結手段は、治療中に連結要素とテンプレートとの連結を維持するために連結要素上に存在する少なくとも1つの電磁石を有することを特徴とする請求項12ないし15のいずれか1項に記載の装置。
【請求項17】
k=2及びm=4であることを特徴とする請求項1ないし15のいずれか1項に記載の装置。
【請求項18】
同定手段は、更に、前記n本の中空治療経路の1つにそれぞれ搭載される多数の高周波同定要素を有し、各高周波同定要素は対応する中空治療経路を変位する前記追跡要素によって制御されることを特徴とする請求項1ないし17のいずれか1項に記載の装置。
【請求項19】
前記高周波同定要素は、対応する中空治療経路を変位する前記追跡要素によってスイッチが入れられることを特徴とする請求項18に記載の装置。
【請求項20】
高周波同定要素は連続的に電磁エネルギーを放出しており、前記電磁エネルギーの放出量は、対応する中空治療経路を変位する前記追跡要素によって変化することを特徴とする請求項18に記載の装置。
【請求項21】
高周波同定要素は、対応する中空治療経路を変位する前記追跡要素によってスイッチが切られることを特徴とする請求項20に記載の装置。
【請求項22】
追跡要素には少なくとも1つのジャイロスコープセンサ及び/又は少なくとも1つの加速度計センサが設けられることを特徴とする請求項1ないし21のいずれか1項に記載の装置。
【請求項23】
各保管手段に対して、前記保管手段に保管されたエネルギー放出源が対応するソース経路を変位する時にエネルギー放出源のエネルギー特性を同定するために前記対応するソース経路付近にエネルギー放出源同定手段を搭載することを特徴とする請求項1ないし22のいずれか1項に記載の装置。
【請求項24】
前記エネルギー放出源同定手段は、1対のエネルギー遮蔽要素とエネルギー検出要素からなり、前記遮蔽要素は少なくとも部分的にソース経路をエネルギー検出要素から遮蔽することを特徴とする請求項23に記載の装置。
【請求項25】
前記エネルギー遮蔽要素は楔形要素として構成されることを特徴とする請求項24に記載の装置。
【請求項26】
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置と共に使用するエネルギー放出源同定手段において、前記装置は、それぞれ放射線遮蔽保管手段に収容され、前記保管手段に接続された対応するソース経路を経て前記事前選択された解剖学的部分へ移動可能な、少なくとも2つのエネルギー放出源を有し、前記エネルギー放出源同定手段は1対のエネルギー遮蔽要素とエネルギー検出要素からなり、前記エネルギー遮蔽要素は少なくとも部分的にソース経路をエネルギー検出要素から遮蔽することを特徴とするエネルギー放出源同定手段。
【請求項27】
前記エネルギー遮蔽要素は楔形要素として構成されることを特徴とする請求項26に記載のエネルギー放出源同定手段。
【請求項28】
動物体の事前選択された解剖学的部分に対して放射線治療を行う方法であって、
i) 前記事前選択された解剖学的部分の1箇所以上の位置にn本の中空治療経路からなる一群を挿入する工程と、
ii) 前記n本の中空治療経路からなる一群を固定位置決め接続テンプレートのn個の接続位置からなる一群と永続的に接続する工程と、
iii) m本の送出経路からなる一群を前記テンプレートのn本の接続位置からなる一群のうちのm本に接続する工程と、
iv) k個のエネルギー放出源をそれぞれ前記m本の送出経路及び相互接続されたn本の中空治療経路のうちの1本を経由して前記事前選択された解剖学的部分内の1つ以上の位置に向かって挿入する工程からなり、前記方法は更に、工程iii)が、
v) m本の送出経路を、治療経路に接続されたテンプレートの前記n個の接続位置からなる一群のうちの別のm個の位置に選択的かつ択一的に接続する工程を含むことを特徴とする方法。
【請求項29】
請求項1ないし25のいずれか1項に記載の装置を用いる工程を更に備えていることを特徴とする請求項28に記載の方法。
【請求項30】
放射線遮蔽区画に収容され、動物体の事前選択された解剖学的部分内の1つの位置に1つの挿入経路経由で挿入されるように構成されたエネルギー放出源を分類する方法において、
a) 前記エネルギー放出源を遮蔽要素を用いて前記放射線遮蔽区画から前記挿入経路経由で一定距離だけ変位させる工程と、
b) 前記一定距離の変位中に当該距離上の異なる位置において前記放射線放出源から送出される線量を検出する工程と、
c) 当該距離上の前記異なる位置における線量を判定する工程と、
d) 前記判定線量計測値を1つ以上の事前決定され記憶された線量−距離曲線と比較する工程とからなる方法。
【図1】


【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6a】
【図6b】
【図7】
【図8】
【図9】

【図10a】
【図10b】
【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6a】
【図6b】
【図7】
【図8】
【図9】
【図10a】
【図10b】
【公開番号】特開2007−44534(P2007−44534A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【外国語出願】
【出願番号】特願2006−220575(P2006−220575)
【出願日】平成18年7月18日(2006.7.18)
【出願人】(500321966)
【氏名又は名称原語表記】Nucletron B.V.
【住所又は居所原語表記】Waardgelder 1,Veenendaal Netherlands
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2006−220575(P2006−220575)
【出願日】平成18年7月18日(2006.7.18)
【出願人】(500321966)
【氏名又は名称原語表記】Nucletron B.V.
【住所又は居所原語表記】Waardgelder 1,Veenendaal Netherlands
【Fターム(参考)】
[ Back to top ]