
動的ブラインド信号分離
動的ブラインド信号分離の方法は、直前のデータウィンドウを処理することによって初期化情報を生成する。21でこの情報が入力され、22で直後のウィンドウのデータの直交性を初期化するために使用される。初期化されたデータは、23でヤコビ技術を使用して小さな更新角度で無相関化される。ステップ22および23は全体で統計用語で言う2次ステージの処理となり、直交正規信号を生成する。25で直交正規信号が初期化され、次いで、27でICAによって2次よりも高次の統計量を用いて小さな角度更新で分離され、分離信号が生成される。この方法は信号を分離し、それらの中から所望の信号を識別する取得フェーズ、および所望の信号だけが分離された後続のフェーズで実施することができる。この方法はまた、最初の結果を取得し、次いで後続のデータスナップショットを用いて直前の結果を繰り返し更新してスナップショット結果を生成し、その結果を重みづけされた直前の結果と組み合わせて指数関数的な減衰を生成することによって実施することもできる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は動的ブラインド信号分離、すなわち、とりわけ非定常環境で使用することができるブラインド信号分離、ならびにそれを実施するための方法、装置、およびコンピュータプログラムに関する。
【背景技術】
【0002】
近年、ブラインド信号(または信号源)分離(BSS)が信号処理の重要な分野として登場してきた。現在、ブラインド信号分離は生態臨床医学、財務分析、音声認識、電気通信などの用途で有効に使用されている。
【0003】
BSSの目的は、センサを用いて雑音や不要な干渉とともに検出された、各信号源からの混合信号の観測だけを前提として、いくつかの統計的に独立な信号を回復または分離することである。「ブラインド」という用語は、個別の信号源またはそれらが組み合わされた方法に関して、以前の情報(例えば、波形、周波数、帯域幅、位置など)がまったく使用できないことを示すために使用される。
【0004】
「ブラインド」という用語は、このような技術に関連づけられることが多いが、信号分離が達成できるために満たすべきいくつかの仮定が存在する。混合条件、すなわちセンサでの信号の結合処理は、線形かつ時不変(time−invariant)でなければならない。時不変という用語は、センサアレイで受信された信号の空間統計(組合せ)が時間とともに変化しないことを意味する。本発明に関する、結合処理の他の仮定は、信号がセンサに同時に到着するということである。この仮定は、瞬時混合(instantaneous mixing)の場合と呼ばれる。
【0005】
結合(混合)プロセスが線形、瞬時的、かつ時不変のときは、この問題に対する多くのBSS法が開発されてきた。これらの方法には、以下のようなものがある。
− I.J.Clarkeによって開発され、以下に記載されたブラインド信号分離(BLISS)アルゴリズム。J.G.McWhirter、I.J.Clarke、およびG.Spence、「Multi−linear algebra for independent component analysis」、SPIE’s 44th Annual Meeting、The International Symposium on Optical Science、Engineering and Instrumentation、Denver USA、18〜23rd July、1999。
− J.F.Cardoso、およびA.Souloumiac、「Blind beamforming for non−Gaussian signals」、IEE proc−F、Vol.140、no.6、pp.362〜370、Dec 1993に記載されたJADE(Joint Approximate Diagonalisation of Eigenmatrices)アルゴリズム。
− T.Blaschke、およびL.Wiskott、「An Improved Cumulant Based Method for Independent Component Analysis」、Proc.Int.Conf.on Artificial Neural Networks、ICANN’02.2002。この参考文献は3次統計量の使用に関するものであり、BLISSの代替方法である。また、この方法はBLISSやJADEに類似したブロックベースの技術である。
【0006】
国際公開第03/028550A2号パンフレットは、母親に外部から貼り付けられた腹部電極を使用して胎児のEGC信号を監視するBLISSの特定の応用例を開示している。電極信号はフィルタされ、独立成分分析(Independent Component Analysis、ICA)に基づくBSS技術で処理される。I.J.Clarke、「Direct Exploitation of non−Gaussianity as a Discriminant」、EUSIPCO ’98、Rhodes、Greece、8〜11 September、1998。
【0007】
国際公開第01/17109号パンフレットは、データをウィンドウ操作し、離散フーリエ変換を適用し、その結果を相互相関させることによるBSSを開示している。次に、最急降下法(gradient descent method)を使用して、混合された信号を分離する有限インパルス応答フィルタを定義する。米国特許第6321200号明細書(Casey)は、フィルタバンク分析を用い、結果として得られたデータをウィンドウ操作して多次元観測行列を生成し、行列の次元を圧縮し独立成分分析を用いて処理することによって混合信号から特徴抽出する方法を開示している。国際公開第03/090127号パンフレットは、4次キュムラント(cumulant)を使用したBSSを開示している。ディスジョイント(disjoint)直交信号のBSSは、A.Jourjine et al.、Proc.2000 IEEE Conference on Acoustics,Speech and Signal Processing、2000 ICASSP’00、5〜9 June 2000、Istanbul Turkey、Vol.5、pp 2985〜2988に開示されている。
【0008】
非定常条件を適用するとき、通常は非定常性に対処することが従来技術の目的ではないので、いくつかの従来技術のBSS法が検出し分離することができる信号の精度は制限される。これは、分離処理において信頼して使用できるデータの量が限られており、統計ベースのパラメータの推定値は正確でない可能性があるからである。さらに、(例えば、何時間にもわたる)大きなデータセットの処理は不可能である。これらの制限が、非定常問題のためのBSS法開発のきっかけとなった。このような方法には、次のようなものがある。
− 独立成分分析(ICA)のためのパーティクルフィルタ(particle filter)。R.M.EversonおよびS.J.Roberts、「Particle filters for non−stationary ICA」、Advances in Independent Components Analysis、Eds.M Girolami、Sprinter、pp.23〜41、2000。
− EASI(等価適応信号源分離(Equivariant Adaptive Source Separation))アルゴリズム。J.F.CardosoおよびB.Laheld、「Equivariant adaptive source separation」、IEEE Trans.on Signal Processing、vol.44、no 12、pp.3017〜3030、Dec.1996。
− カルマンフィルタアプローチを用いた自然勾配アルゴリズム(Natural Gradient Algorithm、NGA)。M.G.Jafari、H.W.SeahおよびJ.A.Chambers、「A Combined Kalman Filter and Natural Gradient Algorithm Approach for Blind Separation of Binary Distributed Sources in Time−Varying Channels」、IEEE conference on Acoustics,Speech and Signal Processing、Vol.5、pp.2769〜2772、May 2001。
− ブラインドデミクシング(demixing)アルゴリズム。Z.MarkowitzおよびH.Szu、「Blind Demixing Real−Time Algorithm of Piecewise Time Series」、Internal Joint Conference on Neural Networks IJCNN’99、Vol.2、pp.1033〜1037、1999。
【0009】
パーティクルフィルタリングは信号処理の比較的新しい領域であり、信号を追跡するためのロバストな方法を提供する。しかし、その計算コストのために、実時間BSSでのその使用は非現実的である。
【0010】
これに対して、EASIや(カルマンフィルタを用いた)NGAアルゴリズムは、はるかに計算上効率的である。これらの技術はそれぞれ、統計的アプローチおよび自然勾配アプローチを利用する。これらの技術は収束が遅くなる傾向があり、非定常環境ではゆっくり変化するシステムを追跡するためだけに適するものである。
【0011】
別法として、よりロバストな技術は(前述のBLISSやJADEなどの)「ブロック」アルゴリズムを使用するが、移動ウィンドウアプローチにおいて使用されるものである。ウィンドウという用語は、データの区分または「ブロック」のために使用される。データウィンドウが一連のセクションとして記録されたすべてのデータを時間内にカバーするように進み、各ウィンドウ位置で信号が分離されるものと想定されている。これらのブロックアルゴリズムは、データのブロックまたはウィンドウを相互に分離して処理する。これらのアルゴリズムはブラインドデミクシングにおいて使用することができ、以下のことを想定している。
− データの各ウィンドウは信号混合プロセスについての十分な情報を含み、信号の信頼できる推定値を得ることができる。
− 定常的混合条件が局所的に適用される。すなわち、各ウィンドウおよび隣接ウィンドウにおいて混合パラメータはゆっくり、滑らかに変化するものとする。
【発明の開示】
【発明が解決しようとする課題】
【0012】
移動ウィンドウアプローチを使用することに関する主要な問題は、「信号スワッピング」と呼ばれている。この問題は、順序が識別できない連続するウィンドウにおける、異なる順序の混合されていない信号から生じる。すなわち、最初のウィンドウでは、123456の順序で1〜6まで番号づけされた6つの信号を分離するように処理され、直後のウィンドウの処理では、これらの信号が413562など異なる未知の順序で生じる可能性がある。したがって、結果として生じる観測信号は、恐らく異なるソース信号からからランダムに集められた部分を含むことになる。連続信号の監視を可能にするために信号を正しく並べ直すことは、処理が困難か、現実的でないか、あるいは不可能な場合がある。
【0013】
ブラインドデミクシングアルゴリズムは、信号を並べ替えるための信号統計に関する事前の知識を仮定することによってこの問題を解決する。しかし、多くの用途では、信号統計はウィンドウごとに変化する。また、それらが未知のこともある。
【0014】
さらに、パーティクルフィルタリングの場合には、移動ウィンドウ技術の計算コストのために、実時間BSS処理のためのその技術を使用することが現実的でなくなる可能性がある。
【0015】
本発明の目的は、信号分離の代替方法を提供することである。
【課題を解決するための手段】
【0016】
本発明は、データのウィンドウに関連する信号の処理を含む動的ブラインド信号分離のための方法であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを含むペアに対して、各先行するウィンドウに関連して得られた結果を用いて後続のウィンドウを処理し、それによってそれぞれの後続のウィンドウに関連する信号の直交性および独立性の個別の初期化を実施して後続のウィンドウの近似結果を求めること、および
b)近似結果を処理して信号分離を達成すること
を含むことを特徴とする方法を提供する。
【0017】
本発明は、通常は従来技術のブロックアルゴリズムより迅速にデータを処理することができるという利点を提供する。その理由は、初期化により(最初のデータウィンドウ以外の)各データウィンドウのフル解析を実施する必要性が回避され、結果として計算が削減されるからである。これは、胎児の心拍監視などの用途で特に重要である。この用途では、緊急の場合に臨床介入(clinical intervention)を可能にするために可能な限り実時間に近い処理が望ましい。さらに、後述するように、直交性と独立性を個別に初期化することにより2ステージBSSに関連する問題が回避される。その問題とは、2ステージBSSの場合は、信号が正規化され、したがって適切に更新できなくなる可能性があることである。本発明は、先行ウィンドウの結果が後続ウィンドウの処理で使用可能であるような、時間に関して十分にゆっくり変化する監視システムに適用可能である。
【0018】
近似結果の処理は、小さな更新を用いて直交性を更新し、それによって無相関化を実現することを2次統計手順に組み込むことができる。直交性の更新は、ヤコビ(Jacobi)法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって実施することができる。
【0019】
この方法は、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化された信号の独立性を初期化する第2のステージの初期化を含むことができる。この第2のステージは、2次統計手順よりも高次の統計手順において、独立成分分析(ICA)を用いて小さな回転更新を初期化された信号に適用して信号の独立性および分離を実現する。2次統計手順よりも高次の手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0020】
この方法は、信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズにおいて実施することができる。
【0021】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0022】
この方法は、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを含むことができる。直前の結果は、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる。スナップショット結果を直前の処理結果と組み合わせる前に、直前の結果に忘却係数(forget factor)を用いて重みづけして指数関数的に減衰する後続のウィンドウを実施することもできる。
【0023】
第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階のテンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。
【0024】
スナップショット結果は平均スナップショットベクトルおよびスナップショット共分散行列を含み、さらに4階のテンソル更新としてモーメントを求めるための信号ベクトルを提供する無相関化され(decorrelated)正規化されたスナップショット等価量を含むことができる。また、スナップショット結果を直前の結果と組み合わせる前に、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを生成することができる。ただし、0<p<1である。
【0025】
他の態様において、本発明はデータのウィンドウに関連する信号を処理するようにプログラムされた動的ブラインド信号分離のためのコンピュータ装置であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えたペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施して後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ようにプログラムされることを特徴とするコンピュータ装置を提供する。
【0026】
このコンピュータ装置は、小さな更新を用いて近似結果の直交性を更新し、それによって2次統計手順における無相関化を実現するようにプログラムすることができる。このコンピュータ装置は、ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって直交性を更新するようにプログラムすることができる。
【0027】
このコンピュータ装置は、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するようにプログラムすることができる。この第2ステージは、2次統計手順よりも高次の統計手順において、初期化されたデータに小さな回転更新を適用して信号の独立性および分離を実現するためのICAを含む。2次統計手順よりも高次の手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0028】
このコンピュータ装置は、信号を分離し分離した信号の中から所望の信号を識別する取得フェーズ、および所望の信号だけを分離処理する後続のフェーズを実施するようにプログラムすることができる。
【0029】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0030】
このコンピュータ装置は、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となるようにプログラムすることができる。このコンピュータ装置は、スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するようにプログラムすることもできる。第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階のテンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。
【0031】
スナップショット結果は、平均スナップショットベクトルおよびスナップショット共分散行列を含むことができる。また、このコンピュータ装置は、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するようにプログラムすることができる。
【0032】
他の態様において、本発明は、データのウィンドウに関連する信号を処理することを含む動的ブラインド信号分離のためのコンピュータソフトウェアであって、コンピュータ装置を制御して
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えるペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施して後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ための命令を含むことを特徴とするコンピュータソフトウェアを提供する。
【0033】
このコンピュータソフトウェアは、小さな更新を用いて近似結果を処理し、それによって直交性を更新して2次統計手順における無相関化を実現するための命令を含むことができる。このコンピュータソフトウェアは、ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって直交性を更新する命令を含むことができる。
【0034】
このコンピュータソフトウェアは、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するための命令を含むことができる。この第2ステージは、2次統計手順よりも高次の統計手順において、ICAを用いて小さな回転更新を初期化されたデータに適用して信号の独立性および分離を実現する。2次統計手順よりも高次の統計手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0035】
このコンピュータソフトウェアは、信号が分離されその分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するための命令を含むことができる。
【0036】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0037】
このコンピュータソフトウェアは、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる命令を含むことができる。このコンピュータソフトウェアは、スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するための命令を含むことができる。
【0038】
第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。スナップショット結果は平均スナップショットベクトルおよびスナップショット共分散行列を含むことができる。このコンピュータソフトウェアは、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルと4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するための命令を含むことができる。
【0039】
本発明をより完全に理解できるように、次に本発明の実施形態について添付の図面を参照しながら説明する。
【発明を実施するための最良の形態】
【0040】
図1を参照すると、本発明の動的ブラインド信号分離(BSS)システム10は2つの信号源11および12からの信号を監視するように構成されている。図示されているように、システム10は、信号源11および12の両方からの出力信号15の受信に応答して電気信号を生成する3つのセンサ14A、14B、および14C(まとめて14)を備えるが、本発明の実際の応用例ではより多くのセンサを使用することもできる。本発明の1つの重要な用途は、胎児の心電図(胎児のECG)を非侵襲的(non−invasively)にモニタすることである。この用途は妊婦の腹部に貼り付けられた外部電極の形のセンサを使用する。このことは、国際公開第03/028550号パンフレット(以下「W550」)に記載されている。このパンフレットには、グランドと基準電極に加えて12個までの信号電極が記載されており、それぞれの信号チャネルを規定している。このパンフレットを本実施形態のベースとして使用する。このパンフレットは、単生児の妊婦に対する単一の胎児ECG、または双生児、三つ子などに対する複数の胎児信号の分離に関係している。
【0041】
センサ14はシステム10のデータ取得ステージ16に入力信号を提供する。そのステージでは、入力信号は、およそ500セットサンプル/秒の割合で、セット単位でサンプルされる。次に、各サンプルはデジタル化され記録される。サンプルの各セットは各センサ14からのそれぞれのサンプルからなり、各セットのサンプルはほぼ同時に記録される。記録された後で、これらの信号は信号分離ステージ17に送られ、そのステージでこれらの信号は処理されてソース信号15に対応する分離された、または混合されていない信号が生成される。分離された信号は解析ステージ18に送られ、そのステージで、分離された信号が解析されて胎児ECG信号、母体ECG信号、および雑音が区別される。
【0042】
胎児ECG監視で記録された信号の構造は複雑である。なぜならば、必要な胎児ECG信号が、はるかに強い母体ECG信号や筋肉雑音などの干渉信号の影響を受けるからである。代表的な従来技術のBSS法は、従来技術のBSS仮定が当てはまる比較的短いデータのセクションまたは時間ウィンドウに制限される。しかし、比較的長い期間にわたって信号が分離され監視されることを求める、良く知られた長い間の切実な要求が存在するが、そのためには、対応する従来技術の方法では十分ではない。
【0043】
取得ステージ16からのデータは、各センサ14からの信号をデジタル化することによって得られるデジタル信号からなる一連のデータ「ウィンドウ」と呼ばれるものとして処理され、代表的な信号は2,000〜3,000信号サンプルから構成することができる。各ウィンドウは部分的にその前のウィンドウとオーバラップさせることができる。すなわち、後述するように、サンプルのセットは両方に共通していてもよい。データウィンドウはデータブロック中の一連のウィンドウ位置によって進み、信号は各ウィンドウ位置ごとに分離され、最終的に全データブロックが処理されるものと想定される。最初のデータウィンドウは、信号分離ステージ17でBLISSまたはJADEなどのブロックモード法によって処理される。このことについてより詳細に説明する前に、各ウィンドウに対する信号モデルを確立し、そのモデルによってBSSを使用する。
【0044】
胎児ECG解析においては、セットあたりの信号サンプルの数は通常、信号電極の数、すなわちグランドおよび基準電極を除いた電極数に等しいと見なされる。
【0045】
BSSに関して、それぞれの信号電極からのm本のデジタル信号を有し、各信号がn個のサンプルを有するデータウィンドウ番号kの適切な(ノイズのない)データモデルは、
Xk=AkSk (1)
で与えられる。ただし、Xkはウィンドウ番号k内のデータからなる(m×n)の行列であり、その各行は(各々が1組のm個のデ−タサンプルとして表された)それぞれの信号である。SkはXkと類似した種類の(m×n)データ行列であるが、混合されていない信号、すなわち分離され、個別のソース信号15に対応する信号を表す。また、Akは(m×m)の混合行列であり、ソース信号15を組み合わせて、電極によって受信される、Xkに対応した混合信号を形成するための変換を表す。式(1)によって表される各ウィンドウの混合モデルは、線形で、瞬時的(instantaneous)で、時不変であると想定する。また、取扱いが便利であり必要な結果に影響を与えないので、各ウィンドウ内のデータは、ゼロ平均を有する(あるいは、実際には、各データは各データのサンプルから平均を減算することによってゼロ平均に変換できる)ものと想定する。
【0046】
BSSで解決すべき信号分離問題は、データ行列Skによって表される信号を(並べ替えによって)回復または非混合化することである。このことは、逆混合行列
【数1】
すなわち、Akの逆行列を求め、式(1)の両辺に前から掛けることによって実施することができる。すなわち、
【数2】
【0047】
k番目のデータウィンドウに対する式(2)は、直後のまたは(k+1)番目のウィンドウ用として書き直すことができる。すなわち、
【数3】
【0048】
逆混合行列
【数4】
を求めるために、BBSアルゴリズムは2つのステージを使用することができる。第1のステージは、2次統計量だけを使用し、信号を非相関化し正規化するものである。第2のステージは、通常は4次統計量を利用し、(第1のステージで得られた)非相関化され正規化された信号を独立にする。
【0049】
各ウィンドウにおいてこれら2つの処理が効率的かつ効果的に実施されるように、この追跡法はいくつかの重要な機能を有する。最初の2つの機能は、初期化および更新処理である。
【0050】
「初期化」という表現は、直前のデータウィンドウの混合行列に関する情報が現在のウィンドウの信号を初期化するために使用されることを意味する。この初期化には、初期化された信号をほぼ分離するという効果があり、したがって信号を非混合化するための完全な計算は必要でなくなる。この例では、信号自体が初期化されるが、実際には、そうすることは必須ではない。代わりに、中間的量を初期化することも可能である、すなわち、データから得られたパラメータ、例えば(後述する)共分散行列などデータの統計的尺度を代わりに初期化することも可能である。現在のウィンドウの混合行列を求めるために、初期化された信号は、初期化なしの場合に必要な量よりもより少ない量の更新しか必要としない。さらに、後で詳述するように、初期化を小さな更新と組み合わせることによって、信号スワッピングの問題を防止することもできる。
【0051】
現在のウィンドウ内の信号は、
【数5】
を使用して初期化できるものと考えられる。したがって、Sk+1に対する最初の近似
【数6】
は、Xk+1に
【数7】
ではなく
【数8】
を掛けること、すなわち
【数9】
によって提供される。
【0052】
式(4)によって提供される、推定された
【数10】
は、Xk+1よりも所望の値であるSk+1により近くなるはずである。しかし、(上述の)2ステージBSSアプローチでは、推定された各信号は同一のパワーを有するように正規化される。したがって、第1のステージ(無相関化)では、信号を更新することはできない。このことについては後で説明する。正規化処理が「実施されない」場合でも、無相関化処理を更新することによりそれ以前のステージの効果が取り消される。説明する本発明の実施例の特徴は、非混合化行列の対応する2次および高次成分を別々に更新することによってこの問題を回避することである。
【0053】
本実施例においては、後でより詳細に説明するように、初期化処理は2ステージで実施される。すなわち、これらのうちの第1のステージでは、信号の直交性が初期化され、次いで無相関化法を用いて信号の直交性が更新される。これによって信号は直交化される。次いで、第2ステージで信号の独立性が初期化され、高次統計ステージを用いて信号の独立性が更新される。これによって信号は独立になる。
【0054】
上述の第1のステージにおいて、1つの選択肢は(m×n)の行列Xkに関して無相関化法および正規化法を実施することである。これは、特異値が降順に配列されるときは特異値分解(SVD)と呼ばれることがある(M.MoonenおよびB.De Moor、「SVD and Signal Processing,III Algorithms,Architectures and Applications」、ASIN:0444821074、Elsevier 1995)。しかし、このような方法で信号を配列することは困難である。なぜならば、信号パワーがウィンドウごとに変化し、信号の再配列につながる可能性があるからである。したがって、信号のスワッピングが生じる可能性がある。すなわち、この処理は、実際には異なる信号のセグメントがつなぎ合わされた見かけ上の信号を生成する場合がある。本明細書では、信号がそのパワーに従って配列されることがないので、SVDより無相関化および正規化という用語の方が好ましい。
【0055】
データ行列Xkの2次分解は、次式で表すことができる。
【数11】
上式で、Ukはデータ行列の共分散行列
【数12】
の固有ベクトルを含む(m×m)のユニタリ行列であり、Vkは
【数13】
の固有ベクトルを含む(n×n)のユニタリ行列である。
【0056】
【数14】
または
【数15】
における上付きインデックスTは行列XkまたはVkの転置を示すものであり、Σkはその対角上に特異値(固有値の平方根)を備え、対角以外のすべての位置にゼロを備えた(m×n)の対角行列を示す。これらの特異値は必ずしも降順に配列されている訳ではなく、これらの特異値は、両方が対応するデータへの関連する固有ベクトルの相対的寄与率を示すものである。
【0057】
Ukの各列はそれぞれ直交正規特異ベクトルである。すなわち、それらはソース信号15の混合を示す空間ベクトルである。
【0058】
【数16】
の各行は、ソース信号15の推定値である直交正規特異ベクトルであるが、一般にこれらの推定値はソース信号の完全に分離されたバージョンではない。なぜならば、完全に分離するためには、それらがさらに相対的な回転を必要とするからである。無相関化によってソース信号を完全に分離することはできない。なぜならば、この無相関化は分解されたベクトルを相互に直交化する、すなわち相互に無相関にする2次無相関化だからである。本発明の多くの応用例では、信号の空間特性(位置)は類似している。したがって、それらの空間特性を異なるものにする解決策は、信号の分離に成功しないはずである。
【0059】
このような信号分離の失敗が図2に示されている。図2は、いわゆる「散布図」と呼ばれるものである。この図では、4つのプロット(a)〜(d)の垂直軸には第1の信号がプロットされ、水平軸には第2の信号がプロットされている。プロット上のポイントは正方形と長方形によって示され、それぞれの時間(サンプル時間)における2つの信号の値を表す。プロット(a)〜(d)は、混合および非混合の様々なステージの信号を示す。プロット(a)は2つのソース信号15の散布図であり、これらのソース信号15は(説明の都合上)ランダムな一様分布の信号と想定している。
【0060】
プロット(b)は、ソース信号の混合信号、すなわち混合後であるが非混合化処理前の2つの信号の散布図である。この図は、混合プロセスが伸張(stretching)、せん断(shearing)、および回転の複雑な組合せに対応していることを示している。プロット(c)は、プロット(b)信号の無相関化および正規化によって得られた2つの信号の散布図である。信号のこのような無相関化および正規化は、統計用語で2次に限定された処理方法を適用することによって得られる。すなわち、この方法は伸張とせん断が除去された推定信号を提供する。しかし、プロット(a)と(c)を比較すると、(c)の推定信号が(a)に対して回転されていることがわかる。すなわち、2次の方法は回転を除去することはできない。したがって、推定信号は未知の回転行列によってソース信号15と関連づけられており、プロット(c)の推定信号を回転して適切な分離信号を得るためにはこの行列を求めることが必要になる。プロット(d)は、プロット(c)の2つの信号を回転することによって得られた2つの信号を示す。回転だけを生成する処理は、せん断または伸張を生成しない。したがって、2次の方法によって得られた結果を是正することはない。回転は、散布図(d)の端部を座標軸(図示せず)に合わせるように選択される。正確な回転は、次に説明するより高次の統計を使用して決定される。ここで「高次」とは、2次よりも高い次数を意味する。
【0061】
信号分離において、未知の回転行列の決定は統計的独立条件を満たすことができる。数学的には、m本の信号x1〜xmの統計的独立性は、信号の結合確率関数p(x1...xm)を信号の結合確率関数p(xi)の積に因数分解する機能として表すことができる。すなわち、
【数17】
【0062】
この処理は高次統計量(HOS)を使用する。未知で独立な信号を分離するためのHOSの使用は、独立成分分析(ICA、通常は2次およびより高次の統計量に関係している)と呼ばれることが多い。この処理が、本実施例における分離処理の第2のステージである。
【0063】
式(5)から、非ゼロ特異値に関するデータだけを使用して、Xkは
【数18】
と表すことができる。ただし、
【数19】
はUkの最初のm列からなる(m×m)の行列であり、
【数20】
は
【数21】
の最初のm行からなる(m×n)の行列である。また、
【数22】
は、k番目のウィンドウのデータ行列Xkの特異値を含む(m×m)の行列である。図2(c)および(d)から、
【数23】
内の信号ベクトルは、回転によってソース信号15に関連づけられている。したがって、(m×m)のユニタリ回転行列Rkを
【数24】
に適用することによって、非混合化または分離されたソース信号15の推定値が生成される。しかし、この適用は、Iを単位行列として、
【数25】
が成り立つような、大きさが等しく逆方向の(m×m)の逆回転行列
【数26】
が同時に導入されない場合には、無相関化と正規化によって以前に得られた結果を許容できないほど変化させる。
【0064】
【数27】
を
【数28】
に掛けることによって、Xkに関する次式の表現が得られる。
【数29】
【0065】
式(7)において、積
【数30】
は混合行列Akの推定値であり、積
【数31】
はそれぞれの推定信号である各行を含む行列である。
【0066】
【数32】
の各推定信号は正規直交する、すなわち直交し、同一のパワーを有するように正規化されるが、相対パワーは推定混合行列Akに格納される。この正規化の態様は、ブラインド信号分離処理に対する2次ステージのアプローチに固有のものである。
【0067】
Rkは、ペアごとの回転の繰り返しシーケンスを用いて計算される(このことについては後述する)。各回転は、対応するペアごとのコスト関数によって評価されたときに、(
【数33】
から取り出された)信号のそれぞれのペアの統計的独立性を最大にするように設計される。この最大化のプロセスにおいて、BLISSおよびJADEアルゴリズムは高次統計ステージのための4次統計量を使用する。本実施形態では、BLISS高次統計ステージを使用する。
【0068】
各ウィンドウに関して、主要な目的は式(7)に含まれるパラメータを計算することである。各ウィンドウが、従来技術のように個別に処理される場合は、各ウィンドウに対する結果は個別に決定されることになる。すなわち、k個のウィンドウを使用する場合の計算コストは、単一のウィンドウの計算コストのk倍になる。このコストは、ウィンドウの数が大きい場合、例えばウィンドウの数が>20で、ウィンドウあたりの各信号が2,500サンプルを有しているような場合には非現実的なものになる。しかし、前述のように、各ウィンドウで得られた結果を後続のウィンドウの分離処理の初期化で使用することによって、必要な処理を削減できることが知られている。この初期化により、データは所望の結果により近い中間形式に変換され、処理が削減される。初期化により、分離された信号により近い信号がもたらされ、信号統計量の完全な計算が不要になる。この方法を可能にするために、混合行列Akが定常的である必要はないが、本発明の目的のためには、時間とともに比較的ゆっくりと変化する必要はある。
【0069】
BSS問題について論じてきたが、次にAkを用いて信号を初期化することが実現可能でないことを示すことができる。例えば、インデックスkの代わりに(k+1)を代入し、k番目のウィンドウの混合行列Akの推定値の逆行列である
【数34】
を両辺に乗じ、行列の逆行列を転置行列で置き換えることによって式(7)を書き直すと、次式が得られる。
【数35】
【0070】
式(8)において、
【数36】
は未知であり、データから推定する必要がある。
【0071】
【数37】
およびRkはユニタリ行列であり、したがって
【数38】
および
【数39】
が成り立つ。ただし、Iは単位行列を表す。Akがゆっくり変化する場合は、
【数40】
および
【数41】
が成り立つ。これら3つの近似式を用いると次式が得られる。
【数42】
【0072】
近似式(9)の右辺において、積
【数43】
は、それぞれが推定信号である行を含む行列である。これらの信号は初期化され、ほぼ正規直交化される。すなわち、ほぼ直交するとともに等しい信号パワーを有しており、無相関化法を用いた移動ウィンドウICAによって処理することができる。しかし、これらは式(5)の無相関化および正規化の方法を用いて得られ、この方法は信号パワーに基づいて正規化されていない信号同士を区別する。このような区別のために、式(5)の無相関化処理は一層困難なものになる。(以下で説明するように)データウィンドウ初期化処理が好ましい。この処理は、着信信号の直交性、すなわち(k+1)番目のデータウィンドウの直交性は初期化するが、それらの信号の正規化は行わない。
【0073】
この実施例は、各々が個別の初期化処理を含む2つの別々のステージで実施される。すなわち、これらのステージの第1のステージでは、k番目のウィンドウ行列
【数44】
を信号に適用することによって各信号の直交性が初期化され、次いでそれらの直交性は、無相関化法を用いて、(k+1)番目のウィンドウのデータを反映するように更新される。これにより、信号は直交する。次に、第2のステージでは、k番目のウィンドウの回転行列Rkをそれらに適用することによって信号の独立性が初期化され、次いで、高次の統計量を用いてそれらの独立性が更新される。これにより各信号は独立になる。
【0074】
図3は、本実施例における信号分離の構成図である。この図はこの実施例を要約するものであり、この例を理論解析と関連づけるために、後で提供される各式が参照される。k番目のデータウィンドウの処理により、行列
【数45】
およびRkの形の初期化情報がもたらされる。21で、行列
【数46】
が入力され、22で、式(16)を用いて直後の(k+1番目)のウィンドウ内のデータの直交性を初期化するために使用される。初期化されたデータは、23で式(18)を用いて小さな更新角度で無相関化される。この場合、「小さな」とは複数の可能性が使用可能であり、より小さなまたは最小の角度が選択されることを意味する。ステップ23は「ヤコビ法」と呼ばれる技術を使用する。この技術は、Adaptive Filter Theory (3rd Edition)、S.Haykin、1996に記載されている。「更新」という表現が使用されるのは、この表現が、ステップ23がステップ22で得られた結果を調整し、したがってk番目のデータウィンドウに基づく部分的な信頼から、後続の(k+1)番目のデータウィンドウに基づくより完全な信頼に結果が更新されるという事実を反映するからである。ヤコビ法は、(k+1)番目のウィンドウのデータ行列Xk+1の共分散行列を対角化することを含む。共分散行列は対称行列である。ステップ22と23は一体で統計用語で言う2次ステージの処理を形成し、直交正規(直交し正規化された)信号を生成する。
【0075】
行列Rkは24で入力され、25で直交正規信号に適用され、式(26)を用いてそれらの信号を初期化する。次に、初期化された直交正規信号は、27で回転により分離される。この回転による分離は、高次統計量と式(29)を用いて小さな角度更新でICAによって実施される。ここでもやはり、「小さな」は複数の可能な更新角度が使用可能であり、より小さい/最小の角度が選択されることを意味する。ステップ25および27は一体で、統計用語で言う高次ステージ処理となり、出力28で分離信号を生成する。
【0076】
多くの無相関化ルーチンにおいて、各信号はペアごとの回転の繰り返しシーケンスを用いて直交化される。これらの回転はそれぞれ、対応するペアごとの(2次)コスト関数によって評価されたときに、所与の信号ペアの直交性を最大にするように設計される。ヤコビ法では、このことは、上記のHaykinの参考文献に記載されたGivenの回転を用いて、対称行列を対角形に変換することによって達成することができる。例えば、2信号の場合には、ヤコビ法を使用する目的は、(n×1)ベクトルとして表された2つの信号x1およびx2の(2×2)に関する共分散行列X12を対角化することである。この行列はHaykinにより次式で与えられる。
【数47】
【0077】
この対角化は、式(10)の共分散行列を回転行列Qを用いて回転させ、(2×2)の行列Bを繰り返し形成してBの非対角要素をゼロにすることによって実施される。すなわち、
【数48】
【0078】
Givenの回転の各繰り返しにおいて、回転行列Qは対称行列X12の非対角要素を最小にするように決定される。行列X12が完全に対角になったとき、すなわち、そのすべての非対角行列要素がゼロになったとき、その行列が表す信号は互いに直交したことになる。このことは、式(11)で単にb12をゼロに設定し、これを満たすΘの値を決定することによって達成される。Bは対称行列である。したがって、b12=b21であり、Θをb12=0となるように決定することだけが必要である。b12およびb21をゼロに等しくすることによって信号x1およびx2を直交させることになり、したがってBは対角行列になる。したがって、Bの対角化はベクトルを直交させるための必要条件になり得る。
【0079】
式(7)を用いると、Xkの共分散行列
【数49】
が形成される。すなわち、
【数50】
【0080】
Rkがユニタリ行列であり、
【数51】
の各行に含まれる信号の推定値が互いに直交するので
【数52】
が成り立つ。
【0081】
したがって、
【数53】
となる。上式で、
【数54】
は(m×m)の対角行列であり、その対角要素はXkの固有値である。
【0082】
(k+1)番目のウィンドウについて、式(14)のkを(k+1)と書き直すと、共分散行列
【数55】
は、次式で表される。
【数56】
【0083】
新たに無相関性を計算することを避けるために、共分散行列
【数57】
は、直前のまたはk番目のウィンドウのために得られた
【数58】
を前から掛け、
【数59】
を後から掛けることによって初期化される。すなわち、
【数60】
【0084】
式(16)は、k番目のデータウィンドウで得られた結果を用いて
【数61】
が、データ行列Xk+1の共分散行列
【数62】
内の情報または信号またはベクトルの直交性を初期化することを表す。共分散行列
【数63】
で表された信号は、明示的にはデータ行列Xk+1の信号ではないが、データ行列Xk+1の信号から導かれたものである。したがって、本明細書で使用される「データウィンドウに関連する信号」という表現および類似の表現は、データ行列Xk+1の信号またはそれらから導かれた信号、例えば共分散行列
【数64】
の信号などを意味する。
【0085】
共分散行列
【数65】
は、データ行列Xk+1の統計量の2次尺度である。その初期化は図3の22であり、初期化によってその行列が含むベクトルの直交性が高まる。初期化によって、式(16)の左辺の行列
【数66】
も対角に近づく。すなわち、その行列の非対角要素が小さくなる。共分散行列
【数67】
を初期化する代わりに、別法として
【数68】
を使用して、データ行列Xk+1それ自体の情報または信号またはベクトルの直交性を初期化し、その結果から初期化された共分散行列を形成することもできる。
【0086】
前述のように、対角化された共分散行列は、その行列によって表される共分散を有するベクトルに直交性を与えるための条件である。
【0087】
22での初期化の後に、以下で述べるように(k+1)番目のデータウィンドウからの情報を使用してもたらされた直交性がさらに高められる。
【0088】
次に、ゆっくりと変化するシステムでは、
【数69】
および
【数70】
が成り立ち、したがって式(16)は、次式のように書き直すことができる。
【数71】
【0089】
(m×m)の対称行列の場合、データの初期化がなければ、ヤコビ対角化法は、その行列
【数72】
の行として表されたすべての関連する信号の単一の更新からなる各スイープごとにm3オーダの操作の繰り返しを必要とする。多数のスイープが必要となることもある。しかし、本発明に従って、22で初期化され式(16)および(17)によって与えられた行列
【数73】
は、すでにほぼ対角行列に近づいている。したがって、ヤコビ対角化法は、ほんのわずかな繰り返しを必要とするだけで収束する。したがって、本発明に従って、変換を用いて(k+1)番目のウィンドウ、すなわち現在のウィンドウの信号の直交性を初期化することによって、計算コストが削減されることになる。
【0090】
次のステップは、23で、この例の場合はヤコビ法を使用して(k+1)番目のウィンドウの対角化を完成させることである。この方法は、直交性に関して初期化済みの行列
【数74】
にヤコビ法を適用したときに推定された固有ベクトルである行列
【数75】
および
【数76】
を使用する。
【0091】
【数77】
および
【数78】
は、初期化された行列
【数79】
を対角化するための小さな回転を実施する回転行列である。すなわち、これらの回転行列は、この行列内の各ベクトルを次式のように更新することによって直交化させることになる。すなわち、
【数80】
【0092】
式(18)において、
【数81】
は、式(16)において直交性が初期化された共分散行列のヤコビ対角化法を用いて計算される。この行列を対角化するためにはユニタリ行列が必要である。前と同様に、
【数82】
が対角になるような行列Qによって実施される回転の形の変換が求められる。ただし、
【数83】
である。この方法は、
【数84】
がデータを初期化し、
【数85】
が小さな更新に基づくものであるという事実を使用する。これらの行列は、どちらもがユニタリであり、それらの積もユニタリになるので、それらの積の形で使用することができる。(k+1)番目のウィンドウの固有ベクトルの推定値
【数86】
は、次式で表される。
【数87】
また、推定信号
【数88】
は式(24)で定義される。これらはすべてステージ22および23で行われる。
【0093】
高次ステージ25/27に関して、式(24)から得られた信号は、Rkを用いて式(26)で初期化される。これは、図3に示されたステージ25で行われる。この処理は、式(24)から得られた信号中の4次情報を初期化する。これらの信号をより完全に独立にする、または分離させるために、それらは式(29)を使用して更新される。これはステージ27で行われる。
【0094】
式(5)で、kをk+1に書き換えると次式となる。
【数89】
【0095】
式(20)に前から
【数90】
を掛けると次式が得られる。
【数91】
【0096】
式(21)に前から
【数92】
を掛けると次式となる。
【数93】
上式で、
【数94】
は、行列
【数95】
中に含まれる固有値の平方根である各要素を含む対角行列である。すなわち、
【数96】
(方法20の高次統計ステージ25/27で使用される)行列
【数97】
に含まれる直交正規信号ベクトルは、式(23)を使用して式(22)から
【数98】
を消去することによって表すことができる。すなわち、
【数99】
【0097】
ベクトルまたは信号
【数100】
は、図3の2次ステージ22/23から出力された無相関化された信号である。前述のように、これらは、図2(c)および2(d)に関連して説明した未知の回転行列によって非混合化された信号(独立のソース信号に対応する)に関連づけられている。高次統計ステージ25/27はこの回転行列を推定するために使用される。繰り返し計算を削減するために、以前のウィンドウからの情報を使用して現在のウィンドウの分離処理を初期化する。
【0098】
(k+1)番目のウィンドウに関して、各々が非ゼロ固有値とゼロ平均を有するm個の直交正規信号ベクトルが、ヤコビ無相関化ステージ23から
【数101】
として求められる。次に、これらは、(m×m)のユニタリ回転行列
【数102】
と、ソース信号15の非混合バージョンである信号推定値
【数103】
の積として表される。
【0099】
【数104】
【0100】
推定値
【数105】
は、起こり得る信号スワッピングやスケールファクタを反映するために任意の並べ替えによって各ソース信号15に関連づけられる。式(25)の両辺に乗算するために、
【数106】
の転置かつ逆行列である回転行列Rk+1を推定する必要がある。すなわち、これにより式(25)の右辺から
【数107】
が消去され、その結果必要な推定値
【数108】
が復元される。混合行列がゆっくり変化する場合は、直前のまたはk番目のウィンドウからの情報を使用して次式が得られる。
【数109】
【0101】
式(26)は、ステップ23から出力された無相関化された信号が、k番目のデータウィンドウから得られたRkを掛けることによって、25でその独立性が初期化されることを表す。これにより、無相関化された信号中の4次情報が初期化される。信号の独立性を高め信号を分離するために、それらの信号は、ステップ27で(k+1)番目のデータウィンドウに基づいて以下のように更新される。すなわち、ゆるやかな変化に対しては
【数110】
となるので、次式が成り立つ。
【数111】
【0102】
BLISSなどのブロックベースアルゴリズムの高次統計ステージ25/27は、本発明に従って、式(27)からの信号の初期化された行列
【数112】
を使用して実施される。このステージは、行列
【数113】
のすべての信号ペアに対する単一の更新である各スイープあたり、ほぼ以下の回数だけ操作が繰り返される。
スイープあたりの操作回数≒20m(m−1)n/2 (28)
上式で、項m(m−1)/2はペアごとの操作の回数を示し、nは(k+1)番目のウィンドウにおける信号サンプルの数、または関連するデータ行列Xk+1の要素の数を表す。式(27)で規定された信号はほぼ分離されているので、信号の分離への収束のためには、高次統計ステージ25/27におけるわずかな回数のスイープの繰り返しだけが必要になる。BLISS推定処理から得られた角度が小さくなったときに、分離が生じたものと判断される。本発明による初期化は、信号を非混合化するために必要な計算ステップの数を削減する。信号の独立性はステップ25での更新によって高められる。また、元の信号ソースの非混合化または分離された推定値
【数114】
は、次式で与えられる。
【数115】
上式で、Rzは小さな回転または更新を実施するユニタリ回転行列である。Rzは、高次ステージ25/27において、初期化されたベクトル
【数116】
を用いて計算される。Rkと同様に、Rzはペアごとの回転の繰り返しシーケンスを用いて計算される。各ペアごとの回転は、
【数117】
から取り出されたそれぞれの信号ペアの統計的独立性を最大にするように設計される。また、独立性は対応するペアごとのコスト関数によって評価される。(k+1)番目のウィンドウのユニタリ回転行列Rk+1は、前述のように、無相関化によって得られた信号ベクトルを回転させる必要がある。このことは、Rkがデータを初期化し、RzがRkに対する小さな更新であるという事実を使用している。これらの行列はどちらもユニタリでありその積もユニタリになるので、これらを積として表すことができる。したがって、回転行列Rk+1は初期化行列と更新行列の積として表すことができる。すなわち、
Rk+1=RzRk (30)
【0103】
式(19)〜(30)に関連して説明した初期化および更新の処理は、信号の分離に関する計算負荷を削減することができる。さらに、それらの処理を使用して信号スワップと呼ばれる良く知られた問題を回避することもできる。このことについては後で説明する。
【0104】
要約すると、式(16)はデータ行列Xk+1内の情報(ベクトルまたは信号)の直交性に関する
【数118】
による初期化を表す。これは図3のステップ22に対応する。信号をより完全に直交させるために、それらは式(18)を用いてステップ23で更新される。更新された固有ベクトル
【数119】
は式(19)を用いて推定され、推定された信号
【数120】
は式(24)で定められる。高次ステージ25/27に関しては、25で、式(24)を用いて得られた信号が、Rkによって式(26)を用いて初期化される。ステップ25は、処理した信号中の4次情報を初期化する。これらの信号をより完全に独立化、または分離するために、ステップ27で、式(29)を用いてそれらの信号を更新して、現在の(k+1)番目のウィンドウをより完全に反映する。
【0105】
次に、信号スワップの問題に注目すると、この問題は胎児ECG解析に関して図4に示されている。4秒/2,000サンプルの長さで、8サンプル幅のデータウィンドウが使用される。すなわち、それぞれがウィンドウあたり2,000サンプルからなる8つの信号が存在する。50%のウィンドウオーバラップが使用される。すなわち、各ウィンドウの後半分が、直後のウィンドウの前半分になる。各ウィンドウは個別に処理され、センサ14は、グランドおよび基準電極に加えて8個の信号電極からなる。この図は、時間対振幅の8本の信号トレース1〜8(左側に表示)を示す。すなわち、これらのトレースは、各々が個別の分離された信号を表すことが意図されたものであるが、そうではなく、各々が複数の信号からの寄与を含んでいる。例えば、トレース3は、胎児ECGに対応するピーク周期性を有する第1の領域30、母体ECGに対応するピーク周期性を有する第2の領域32、および雑音からなる第3の領域34を含む。
【0106】
信号スワップの現象は、2次ステージ22/23(式(17)〜(22))および/または高次ステージ25/27で生じる可能性がある。この現象は、前述の初期化処理における、小さな回転更新を適用するだけで是正される。ここで、(前述のように)「小さな」は、複数の可能な回転が存在し、より小さい/最も小さいものが選択されることを意味する。以下の議論のために、xおよびyはベクトルであり、その各々は、データウィンドウの全長に広がる、それぞれのセンサからの信号のすべてのサンプルを表す
【数121】
のそれぞれの行である。xとyが2次ステージ22/23で初期化された後で、それらは互いにほぼ直交している。このことは図5に示されている。この図では、初期化されたベクトルxおよびy(実線矢印)は、破線40によって示された直交座標軸によって示されると同様に、ほぼ90度離れている。
【0107】
ベクトルxおよびyをより正確に直交させるために、それらの間に相対回転角θが導入される。この回転は、前述の対称行列に関するヤコビ対角化などの無相関化法によって実施される。すでにほぼ直交している信号について、この方法によって2つの解、すなわちθ≒0度およびθ≒90度が得られる。信号スワップを避けるためには、より小さな値であるθ≒0を選択すべきである。各信号が実際に、互いにより小さな値のθだけ相対的に回転させられる場合、これは次式によって与えられるGivensの回転行列に相当する。すなわち、
【数122】
【0108】
θ≒0のときは、1対の初期化された(ほぼ直交した)ベクトルxおよびyは次式を用いて更新することができる。
【数123】
【0109】
この場合、更新された信号は同一の順序であり、信号スワップが避けられる。これは、θ≒90度の場合と対照的であり、θ≒90度の場合には、あるベクトルを他のベクトルに対して回転させるGivens回転行列は次式となる。
【数124】
【0110】
式(33)を用いて、1対の初期化されたベクトルxおよびyを更新すると次式が得られる。
【数125】
【0111】
この場合、更新された信号は、xTと−yTの位置の入れ替わりによって示されるようにスワップされ、−yTの負号によって示されるように符号反転も生じる。
【0112】
したがって、ヤコビ無相関化法においては、解への収束を達成するために2つの角度の小さい方が選択される。したがって、2次ステージの初期化処理および小さい方の角度によるヤコビ更新を用いると、本発明により信号スワップが回避される。有効であるために、このアプローチは、考慮中のシステムがゆっくり変化すること、および結果としてθの値が小さくなることを利用している。
【0113】
信号スワップは高次統計量ステージでも起こり得る。なぜならば、やはり複数の選択できる解または回転角度が存在するからである。式(27)を使用してデータにRkを適用した後で、推定された信号ベクトルは、小さな回転によって対応するソース信号に関連づけられる。BLISSまたは高次統計量ステージでは、4次統計量が使用されるので、ここでは信号分離を達成するために選択可能な4つの角度が存在する。このことは図6に示されている。この図は、デカルト座標軸52に対して小さい角度で回転された2つのほぼ分離された信号の散布図50を示す。これらの信号が適切に分離されている場合は、散布図50の底辺および左辺である54および56は、それぞれの軸52に揃うはずである。このように信号がほぼ分離されているときは、散布図50を4つの角度(θ≒0,90,180,または270度)のうちの任意の1つで回転させて、軸52に揃えることができる。ここでもまた、本発明によれば、4つの角度のうちの最も小さい角度を選択することで信号スワップが避けられることが明らかになった。
【0114】
前述のように、BLISSは4次統計量に基づいている。BLISSの代わりに3次統計量に基づく技術を使用することも可能である。このことは、「An Improved Cumulant Based Method for Independent Component Analysis」、T.BlaschkeおよびL.Wiskott、Proc.Int.Conf.On Artificial Neural Networks、ICANN’02、2002に記載されている。3次および4次統計量の組合せを使用することも可能である。
【0115】
上述のように、本発明は、図4に示され解析されたデータを用いる胎児ECG解析に使用された。ただし、このデータは信号スワップを含んでいる。データウィンドウは、4秒/2,000サンプルの長さ、8サンプル幅、ウィンドウオーバラップ50%で使用された。すなわち、各ウィンドウの後半分は直後のウィンドウの前半分となっていた。センサ14は、グランドおよび基準電極に加えて8つの信号電極から構成され、8つの信号を生成した。各ウィンドウは、式(17)〜(30)によって示されるように処理された。結果は図7に示されている。この図は、時間対信号振幅の8本のトレース61〜68(左側に表示)を示す。これらの信号は、明らかに良く分離された信号を表しているように見える。なぜならば、各トレースに対して信号特性が変化しないからである。例えば、トレース61および65はどちらも、胎児ECGに対応する約140ビート/分を示す。トレース62、67、および68は、母体ECGに対応する約87ビート/分を示す。雑音を含む低周波信号は、トレース64上で良く分離されているように見える。また、雑音は63および66で分離されている。このことは、信号スワップを防止する本発明の機能を示している。例えば、複数の母体ECG信号が存在している理由は、心臓が点信号源ではなく、同一の広がった信号源からの複数のECG信号が存在する可能性があるからである。
【0116】
初期化および更新処理はまた、所望の信号だけに対象を絞り込むこともできる。この技術は、不要な信号を追跡することによって生じる不必要な計算を避けることができる。この技術は、関心のある信号(例えば、母体ECGや胎児ECG)を取得ステージで分類することができるという事実を利用する。胎児ECG解析では、この分類処理は、ユーザ(臨床医もしくは医者)の選択またはパターン分類技術によって実施することができる。ECG信号のパターン認識方法については、J.PanおよびW.J.Tompkins、「A Real−Time QRS Detection Algorithm」、IEEE Transactions on Biomedical Engineering 32(3):230〜236、1985に記載されている。
【0117】
所望の信号が識別された後で、この情報を使用してそれらの処理に集中または対象を絞り込むことができる。取得ステージ16で関心のある信号を分類した後で、そのような対象の絞込みのない場合の本発明と比べると、対象を絞り込む技術は、信号分離ステージ17での更新を所望の信号に制限することだけが異なる。
【0118】
図8は、所望の信号を絞り込んだ場合の信号分離80の構成図である。71で、直前の(k番目の)データウィンドウからの行列
【数126】
からなる初期化情報が入力され、72で
【数127】
が(k+1)番目のウィンドウ中のデータに適用されてその直交性が初期化される。次いで、後で詳述するように、73で所望の信号に対象が絞り込まれ、74で(他の信号を除く)それら所望の信号だけがヤコビ法を用いて小さい更新角度で無相関化される。ステップ72〜74は一体で、統計用語で言う2次ステージの処理となり直交正規信号を生成する。次に、75でk番目のウィンドウの回転行列Rkが入力され、76で直交正規信号に適用されてその独立性が初期化される。次に、77で再び所望の信号に対象が絞り込まれる。所望の信号は、78でICAによって高次統計量を用いた小さな角度の更新で分離される。ステップ76〜78は一体で、統計用語で言う高次ステージの処理となり、出力79で分離された信号を生成する。
【0119】
図8の73および77での所望の信号の絞込みは、2次および高次ステージの両方に示されている。これは必須ではなく、両方の代わりに一方または他方を使用することができる。77で高次ステージにおける所望の信号を絞り込むことによって、ほとんどの利点が得られる。この高次の対象を絞り込むアプローチは、2次情報を初期化し、式(16)を用いてヤコビ法で更新し、次いで式(27)を用いて高次データを初期化する処理を再度使用する。
【0120】
対象を絞り込む方法についてより詳細に説明する前に、高次ステージ76〜78がペアごとの回転の繰り返しシーケンスを使用して実施できることを再度強調しておく。これらの各回転は、信号のペアを形成する2つの信号の統計的独立性を最大にするように設計される。また、統計的独立性は関連するペアごとのコスト関数によって評価される。m本の信号v1〜vmの場合は、mC2またはm(m−1)/2の信号ペアが存在する。76でこれらの信号を初期化して、ゼロ平均の直交正規ベクトル
【数128】
から
【数129】
を形成した後で、ベクトルペアの総数は次のように表される。
【数130】
(35)の直交正規ベクトル
【数131】
から
【数132】
は、前述のように、直前のデータウィンドウを用いて得られた高次情報を使用して初期化されるものと想定されている。対象の絞込みが無ければ、繰り返しシーケンスにおいてこれらのペアのすべてを更新しなければならず、このことは、m(m−1)/2のペアを更新する必要があることを意味する。これに対して、対象を絞り込むアプローチでは、所望のベクトルを含むペアを更新することだけが必要である。これは以下のように可能である。
− 初期化および小さな更新処理により、各ベクトルは分離処理において、その順序を維持すること(各データウィンドウに対して、三角形の中のそれらの位置を変化させないこと)が可能になる。また、
− 信号取得ステージにおいて所望の信号(この例では、母体および胎児ECG)を識別することによって、更新処理におけるこれらの信号をベクトル
【数133】
および
【数134】
で表すことができる。次に、
【数135】
および
【数136】
だけを、個別および一体で含むペアに対象を絞り込むことができる。
【0121】
【数137】
および
【数138】
を含むペアが対象であり、他に無ければ、(35)の最初の2行だけを更新する必要がある。この更新は、全更新のm(m−1)/2ペアに対して(m−1)+(m−2)信号ペアだけを含む。この「対象を絞り込む」処理においては、母体および胎児信号だけが分離される。この例では必要がないので、他の信号の分離は実施されない。
【0122】
上述のように、この対象絞込みの方針は2次ステージ72〜74にも適用することができる。取得ステージの後で、式(11)などによって2次情報を初期化して初期化された共分散行列を生成することによって、この行列の所望の信号に対応する行は更新されるが、他の行は更新されないことになる。
【0123】
次に、図9を参照すると、双生児を妊娠している母親から得られたECGデータが示されている。これらのデータは、W550に記載されたような、グランドおよび基準電極に加えてそれぞれの信号チャネルに対する16個の外部腹部信号電極を使用して得られたものである。ただし、信号分離は使用されていない。データは30秒間にわたって取得されている。16本の信号トレース91〜106(左側に表示)が存在し、そのほとんど(92、93、95〜106)で強い母体ECG信号が、例えば107などの約0.8秒間隔(約72ビート/分)のスパイクとして観測することができる。双生児からの胎児ECG信号は、雑音により識別されない。
【0124】
図10は、本発明の技術を用いて図9に示された信号を分離することによって得られた結果を示す。ただし、上述の対象の絞込みによる所望の信号の選択は実施されていない。これらの信号を処理するために、6秒/3000サンプルの長さ、16信号チャネルなので16サンプル幅のデータウィンドウが使用された。各ウィンドウはそれぞれ、直前のウィンドウと60%(3.6秒)オーバラップした。図は信号トレース111〜126(左側に表示)を示し、トレース112と125が母体ECGである。トレース115と118は双生児の一方の胎児ECG信号であり、トレース121と123は双生児の他方のECG信号である。トレースは、信号が良く分離され連続であること、すなわち信号スワップが防止されていることを示している。
【0125】
本発明を適用して図10に示された結果を生成することは、16本の信号を追跡することによる計算負荷を伴う。取得ステージにおける特異値の使用などの信号検出手順を使用することもできた。特異値は、データ中の信号についてのパワーの指示を提供する。しかし、胎児ECG信号は弱いことが多いので、この検出方法は正確ではない。それにもかかわらず、取得ステージで信号を分離する際に、(パターンマッチングを使用して)それらを識別することができる。したがって、本発明の方法は所望の信号に集中するように対象を絞り込むことができる。パターン認識技術を使用して、繰り返し波形を検出することができる。例えば、心拍信号には、心臓学でQRS部と呼ばれている独特の形状の主要部分が含まれる。母体ECGのQRSは胎児信号のQRS部よりはるかに強く、より少ない繰り返しを示すはずである。
【0126】
図11は、図10に関して使用したのと同一のデータを使用して、それぞれの双生児からの胎児ECG信号に、(高次ステージにおいてのみ)対象を絞り込む形の本発明の方法を適用した結果を示す。双生児のそれぞれからの信号である2つの信号140および142が示され、それらはやはり連続である。すなわち、信号スワップは生じていない。対象を絞り込む方法は、対象を絞らない方法と同一の取得ステージ16を使用する。図10の信号115と121は、検査によって異なる双生児の胎児ECG信号と識別され、これらの信号は、対象を絞り込む形の本発明の方法を使用して追跡され、図11に示された結果を提供する。対象を絞り込むアプローチでは、取得ステージにおける最初のブロックのデータを使用して、すべての使用可能な信号が処理され、分離される。したがって、それらの中から所望の信号を選択することができる。所望の信号は
− ユーザによる検査、または
− 科学文献において広く使用可能な、多くのパターン認識技術のうちの1つ
のどちらによっても識別することができる。
【0127】
取得ステージの後で、所望の信号だけが処理されて完全に分離される。(35)の信号の3角形で示されるように、分離された信号の順序が取得ステージで決められた後で、各信号は、所望の信号が3角形の上部の行を占めるように並べ替えることができる。すなわち、この例では図10の信号115および121が第1および第2の信号になる。次いで、初期化および更新処理でこの順序が維持される。すなわち、更新処理においてこれらの信号の位置が知られているので、これらの信号に対象を絞り込むことができる。
【0128】
第2の実施例では、本発明の対象を絞り込む方法は、単生児の胎児ECG記録、すなわち一人の胎児のECGに適用することができる。この記録は、12の信号電極および関連するグランドと基準電極を使用し3分間継続される。図12には、それぞれの電極に対応する12の信号(a)〜(l)の30秒間の記録が示されている。このデータセットの記録を処理するために、長さが6秒でウィンドウオーバラップがゼロ(すなわち、連続的なウィンドウ)のデータウィンドウが使用される。結果は、記録の第1の(0〜1)分間、第2の(1〜2)分間、および第3の(2〜3)分間における、時間に対する3つのプロットとしてそれぞれ図13に示されている。また、同一の信号は同一の参照名で示されている。各プロットは、それぞれ胎児および母体の信号に対応する、信号150および152を示す。これらの信号は連続である。すなわち、スワップしていない。
【0129】
信号スワップに対処する他の方法は、オーバラップウィンドウを使用することであり、結果として生じたオーバラップする推定信号の相互相関を使用することである。例えば、ウィンドウkおよびk+1の推定信号のオーバラップ部分が、fサンプル長さであるとし、それぞれ(m×f)の行列
【数139】
および
【数140】
で表されるものとする。これらの行列の各行は推定信号を含み、オーバラップ部分は類似の信号を含む。行列
【数141】
は
【数142】
に次式によって関連づけられる
【数143】
上式で、Dは(m×m)の行列であり、その対角要素は1または−1(信号の反転を提供する場合)である。また、Pは(m×m)の置換行列(信号のスワップを提供するもの)である。このような状況は隣接ウィンドウ間で生じる。なぜならば、推定信号が異なる順序で並べられる可能性があり、また反転が生じる可能性があるからである。推定信号のオーバラップ部分は、この相関行列がほぼ対角行列になるまで並べ替えられる。その場合には、信号は同じ順序になっているはずである。この技術については、G.Spence、「A Joint Estimation Approach for Periodic Signal Analysis」、PhD thesis、Queen’s University Belfast、June 2003に記載されている。図14a〜bはこの技術を例示するものである。図14aでは、あるウィンドウからの8つの信号が直後のウィンドウからの8つの信号と相関している。ピーク160は、一方のウィンドウの信号番号8が他方のウィンドウの信号番号2に対応していることを示す。類似の所見が162など他のピークにも適用される。信号スワップは、2つのウィンドウからの相関する信号に同じ信号番号が対応づけられるように信号を再指定することによって修正される。それによって、図14bに示された状況が生じる。図14bは、信号の再指定を除けば図14aと同一である。この図で、相関する信号を示す164などのピークは対角だけに現れる。
【0130】
次に図15を参照すると、胎児ECGの監視を実施するために適した一般的な電極装置が170によって示されている。この装置は、母親の皮膚表面に配置し、そこから発生した電圧信号を監視するのに適した、いくつかの腹部電極171a、171b、171c、G、およびRを含む。ここで、Gはグランド電極、Rは基準電極、171a〜171bは信号電極を示す。便宜上、171aなど5つの電極だけが示されているが、分離すべき信号の数に対応して必要な数だけ使用することができる。電極171a等は、それぞれの保護リード172a〜172eを介してリードボックス173に接続される。このリードボックスはやはりコンピュータ174に接続される。
【0131】
リードボックス173は、信号電極171a等からの信号を処理する回路を含み、173aの差込図に示されている。回路は2つの信号電極171aおよび171b用に示されており、破線Dは他の信号電極用の類似の回路を示す。回路は、171a等の各信号電極ごとに、それぞれの低雑音差動増幅器175、ならびにどちらもがフィルタユニット176に組み込まれたアナログハイパスフィルタおよびアナログローパスアンチエイリアシング(anti−aliasing)フィルタを含む。フィルタ176は、共通の多チャネルアナログ−デジタル変換器(ADC)177に接続される。増幅器175は、基準電極Rからの信号をそれぞれの信号電極171a等からの信号から減算し、結果として得られた差動信号を増幅する。差動信号はADC177によってデジタル信号に変換され、次いで、前述のように、信号を分離するためにコンピュータ174を用いて記録され処理される。
【0132】
次に、図16および17を参照すると、これらの図は、やはり生理学的な監視のためのものであるが、本発明の他の応用例のための信号およびそれぞれに分離された信号の記録を示すものである。この応用例は、心拍数や呼吸数を検出するための受動的な睡眠記録である。これは、ある人が(呼吸が不能になり心拍数が増大する)睡眠時無呼吸を患っているかどうかを判定する助けとなる。
【0133】
図16の12本の信号201〜212(左側に表示)は、患者が寝ているマットレスの下に置かれた12個のセンサを使用して250Hzでサンプルされる。信号は、ベッド/マットレスを介してセンサによって受信された振動を示す。各々が4000信号サンプル長(16秒)の50個のデータウィンドウが、ウィンドウオーバラップ85%を用いて処理された。使用可能なすべての信号が処理された。すなわち、信号は対象が絞り込まれなかった。ウィンドウオーバラップが大きい理由は、本発明が、連続するウィンドウ間で状況がゆるやかに変化するという想定に基づいているからである。したがって、この想定を満たし、初期化処理をより正確なものにするためには、2つの連続するウィンドウの開始点間の時間差は十分に短くしなければならない。この場合、この基準を満たすためには、データウィンドウのわずか15%(2.4秒)の時間差になる。状況が許せば、非オーバラップの連続ウィンドウを使用するのが好ましい。なぜならば、必要なデータウィンドウの数がより少なくなり、処理時間が最小になるからである。
【0134】
図17には、12本の分離された信号221〜232(左側に表示)が示されている。これらの信号のうち221、224、および225は、約0.83秒の周期性を持つ推定された心臓信号である。信号226および228は、約4.4秒の周期性を持つ呼吸に対応する推定された信号である。
【0135】
初期化および更新処理なしで、上述の並べ替え技術を使用して信号スワップの問題を修正するための信号分離を実施することを想定することは、原理的には可能である。しかし、これには欠点がある。このことは、計算上有効な対象絞込みアプローチを使用する本発明の機能が使用できないことになる。さらに、相互相関技術において信頼できる推定を提供するためには、大きなウィンドウオーバラップを使用しなければならないことになるはずである。このことは、データを処理するために、より多くのウィンドウが必要になることを意味する。例えば、50%ウィンドウオーバラップでは、1度の処理(すなわち、オーバラップなし)に対してデータは2度処理される(2倍の長さを取る)ことになる。このことは、センサ14による混合された信号の検出と、非混合信号の生成との間の時間が長くなるので不利になる。胎児ECGの場合は、特にこのことが重要になる。なぜならば、心拍異常が検出された場合には臨床医の迅速な介入が必要になることがあり、処理時間が長くなりすぎると、遅すぎて胎児を救うことができなくなる可能性があるからである。
【0136】
本発明の前述の例は、複素値データにも適用することができる。2次および高次ステージを初期化し、小さな更新を使用する原理は不変であるが、2次ステージ(ヤコビ法)および高次(ICA)ステージの複素値バージョンが必要になる。複素値データに対するICAの使用については十分に研究されており、この問題に対する多くの無相関化およびICA技術が開発されてきた。複素値ヤコビ法に関する詳細については、S.Haykin、「Adaptive filter theory,second edition」、Prentice Hall、ISBN 0−13−013236−5、1991を参照されたい。
【0137】
さらに、複素値ICA法についてのより詳細な情報は、以下に記載されている。
P.Comon、「Independent component analysis,A new concept」、Signal Processing 36、pp.287〜314、1994
I.J.Clarke、「Exploiting non−Gaussianity for signal separation」、MILCOM 2000.21st Century Military Communications Conference Proceedings、Volume:2、22〜25 Oct.2000。
【0138】
上記3つの参考文献のうちの最後の文献で、Clarkeは、BLISSの拡張バージョンが、複素信号の同相および直交成分を個別の実信号として取り扱うことによって複素信号に対処できることを示している。ヤコビ法およびBLISSのこの拡張されたバージョンを使用することにより、初期化された信号の小さな更新がやはり可能になる。これは、ヤコビ技術においてより小さな角度が選択されるからであり、高次ステージにおける初期化された信号の回転がやはり4次統計量を使用するからである。
【0139】
(k+1)番目のウィンドウにおける本発明の複素値バージョンの各式は、以下の4つのステージに要約することができる。上付きインデックスのHは行列またはベクトルがエルミートであることを表す。これらの各式は、実数の場合を表すためにも使用できる。
【0140】
1.2次ステージにおける初期化
【数144】
2.複素値ヤコビ法を用いた更新
【数145】
3.高次ステージにおける初期化
【数146】
4.複素値ICAを用いた更新
【数147】
【0141】
式(39)および(40)はそれぞれ、更新された固有ベクトルおよび直交正規信号を表す。式(42)および(43)はそれぞれ、更新された独立信号および高次回転行列を表す。第4ステージの処理は、図3に関連して前述したように要約される。本発明の対象絞込み態様もまた複素値の場合に適用可能であり、この態様もやはり所望の信号を含む信号ペアだけを更新する。
【0142】
前述の説明で与えられた、中間量および結果を計算するための各式は、搬送媒体に収録され従来のコンピュータシステム上で動作する適切なコンピュータプログラムによって明確に評価することができる。このようなプログラムおよびシステムは、熟練したプログラマならば発明を必要とせずに容易に実装することができる。したがって、これ以上は説明しない。
【0143】
次に、本発明の他の実施形態について説明する。センサからのデータを実時間で処理するとき、1回でデータ行列を更新するために1つまたは少数のデータスナップショットだけが使用可能なことがある。ここで「スナップショット」は、1組の同時データサンプル、すなわち各センサからの信号のそれぞれの単一のサンプル、すなわちデータ行列の行として定義される。このような場合、前述の移動データウィンドウアプローチは大量のウィンドウオーバラップを必要とする。すなわち、連続する処理ステージ間でウィンドウの位置は限られた量だけしか移動できないことになる。したがって、データをカバーするために多数のウィンドウが必要になることがある。このことにより、(所望の解に初期化されているとしても)、各ウィンドウごとにかなりの程度の、そして恐らくは大量の冗長データがウィンドウの統計量として再計算されることになる。本発明のスライディングウィンドウバージョン(前述の例)を対象とした、これに対処するための1つのアプローチは、全体の統計量から最も古いスナップショットの統計量を減算することである。次に、最新に追加されたスナップショットの統計量が計算され、全体の統計量と最も古いスナップショットの統計量の差に加算される。やはり、BLISSアルゴリズムを実施するための2つの方法が存在する。一方のバージョンは、センサ信号またはデジタル化された等価量に直接作用し、他方は、それらの信号から得られた4階のテンソルに直接作用する。これらのバージョンからの結果のセットは等価になるはずであり、先の実施形態の移動ウィンドウアプローチのために使用することができる。
【0144】
冗長性の問題は繰り返し更新アプローチを使用することによっても回避することができる。このアプローチでは、信号分離は以前に計算された(再計算されない)古いデータの統計量と最新に追加されたデータから得られた新たに計算された統計量に関する重みづけられた尺度を用いて実施することができる。このアプローチは前述の移動ウィンドウアプローチと概念的に異なるものではない。このアプローチもやはり、初期化と小さな更新処理を使用し、やはり2次および高次統計ステージに適用される。しかし、矩形のウィンドウを用いた移動ウィンドウアプローチを使用する代わりに、指数関数的に減衰するウィンドウが使用される。これにより、本発明が、ウィンドウのオーバラップ領域を再計算する問題を回避しながら、最新の使用可能なデータスナップショットを繰り返し処理することが可能になる。その結果として、オーバラップウィンドウ部の統計量が再計算されないので、冗長性が最小になる。
【0145】
この実施形態では、繰り返し更新アプローチは2つの部分に分けられる。第1の部分は、先の実施形態と同様にデータの矩形のウィンドウを使用するものであり、取得ステージと呼ばれる。取得ステージでは、信号は前述のように分離される。取得ステージでは、データの1次、2次、および高次統計量が計算され、第2ステージで使用される。第2ステージでは、これらの統計量が繰り返し更新される(表2〜4参照)。n個のサンプルを用いる取得ステージにおいては、データは(m×n)のデータ行列X0=[x1 x2...xm]Tとして定義される。ただし、行x1〜xmはそれぞれ、それぞれのセンサの出力信号を表す。したがってX0は、各々がn個の要素を含むm個のベクトルx1〜xmによって表される。表1のX0および他のパラメータの下付き指標0は、取得ステージのt=0を表す。テンソルを形成する4次モーメントは以下の表1に示されている。これらのモーメントは、任意の種類の4つのベクトル、例えばテンソル要素Mijklが
【数148】
で与えられるようなyi、yj、yk、およびylの間の関係の尺度を示す。上式で、yi(τ)はベクトルyiのτ番目のサンプルを表す。また、τは整数の時間指標であり、連続するサンプル間の時間間隔Tsが乗算されるとサンプル時間を表す。
【表1】
【0146】
M0の各要素Mijklは次式で定義される。
【数149】
上式で、vi(τ)はi番目の信号ベクトルviの時間τでのサンプルであり、τはサンプリング時間間隔の単位であり、nは、先に示したように、各ベクトルあたりのサンプル数である。
【0147】
表1の定義を用いると、この例の2次ステージまたは繰り返し更新ステージは、数学的に以下のように定義することができる。説明の便宜上、このステージは、重みづけによって減衰させられた以前のスナップショットの寄与を含む以前のデータウィンドウと各更新あたりの新しいデータからなる単一のスナップショットの加算とを含むデータを用いて各々が作成された、一連の更新として説明される。このことは、より古いデータほど漸次、より大きく減衰させられることを意味する。各スナップショットは指標番号tを有する。ただし、tはサンプル時間間隔の単位でt=1〜Tであり、最初のステージまたは取得ステージはt=0で示される。しかしながら、本発明のこの実施形態は、各更新あたり単一のスナップショットに限定されるものではない。
【0148】
便宜上、ここでデータスナップショット(これまではxt)をdtと定義する。また、ここで2次統計量ステージから得られたスナップショットの無相関化され正規化された等価量(これまではvt)をztと定義する。
【0149】
取得の後で、各スナップショットdtごとに、それぞれの平均ベクトルvtが下表の式(50)を用いて繰り返し更新され、下表の式(51)を用いてデータスナップショットから減算される。以下の表2〜4において、繰り返し更新ステージの処理が定められる。各更新が複数のスナップショットを含む場合は、更新におけるすべてのスナップショットに関して平均が計算される。
【表2】
【0150】
式(50)および(51)は、信号処理において「忘却係数」と呼ばれるpおよび(1−p)の使用による、指数関数的に減衰するデータのウィンドウから生成される1次統計量を提供する。pの値は0と1の間に存在する。したがって、pおよび(1−p)は古いデータの影響を漸次減少させる。この例では、pの値は0と0.1の間に存在する可能性が高い。各更新ごとに(1−p)およびpが適用されるので指数関数的な減衰が生じる。したがって、スナップショット後の更新される回数が増えるほど、その影響が減衰する。例えば、u回の更新の後で、w番目の更新スナップショットはp(1−p)u−w+1だけ減衰する。ただし、取得ステージウィンドウのスナップショットはwの値に関しては無視される。忘却係数の値pは、取得データウィンドウの長さに関連させて設定することができる。それはまた、データの信頼を反映するように、適応させてpを設定することができるという利点も提供する。例えば、データの雑音成分が減少しているか増加しているかに応じて、処理の間にpの値を上方または下方に調整することができる。
【0151】
繰り返し更新ステージにおける処理手順の次の部分では、以下の表3の式(52)〜(56)が使用される。この部分では、データ行列の共分散行列χtによって表される2次統計量は、式(52)を使用して繰り返し更新される。ここで、時間tにおける共分散行列χtは、やはり指数関数的に減衰するウィンドウを提供するために、時間(t−1)の共分散行列χt−1に(1−p)を乗じたものと、新しいデータスナップショット
【数150】
の共分散行列
【数151】
にpを乗じたものとを加算することによって生成される。最初の更新に関して、t−1=0は関連する前の結果が表1に関連して説明した取得ステージからのものであることを示す。共分散行列χtは先の実施形態で説明したように(式(16)参照)、
【数152】
を前から乗算し、Ut−1を後から乗算することによって、式(53)によって初期化された直交成分を含む。ここで続いて、rモード積を示すためにxr(r=1,2...)を使用する。rモード積とは、例えば2次の場合にXXT=UλUT=λX1UX2Uを満たすものである。ただし、U、λ、Tに関しては、以前に定義済みである。したがって、表現λX1UX2Uは、行列Uがλの最初の次元に適用され、次いでλの第2の次元に適用されることを意味する。本実施形態の目的は、2次データ共分散行列を対角化することであり、この行列が全体のデータウィンドウを処理することによって生成されたものでははなく、式(52)の繰り返し更新から生成された場合であっても、先の実施形態と同様にその行列を対角化することである。式(54)で、行列
【数153】
は小さな更新を用いて対角化される。更新の結果は、式(55)および(56)で定義される。この実施形態では、各更新は単一のスナップショットを含むので、式(56)は単一のスナップショットの2次推定値ztを生成する。各更新が複数のスナップショットに関して実施される場合は、推定もまた複数のスナップショットに対して実施される。
【表3】
【0152】
本実施形態の次の(高次統計量)部分は、以下の表4の式(57)〜(62)を使用する。2次ステージの式(56)によるスナップショットの現在の推定値が、高次ステージに送られる。このスナップショットの4次モーメントテンソルは式(57)で形成され、繰り返し更新される。このテンソルは式(59)のRt−1の適用によりほぼ対角化されており、次いで小さな更新Rzを使用して式(60)によってより完全に対角化される。この4次テンソルの対角化は、この例における信号分離の必要条件である。これらはやはり、BLISSアルゴリズムを使用して計算することができる。回転行列は式(61)を使用して決定される。また、(時間tにおける)信号の推定値は式(62)によって与えられる。ここで繰り返し更新から4次統計量が生成されることを除けば、これらは先の実施形態と同じ種類の処理である。
【表4】
【0153】
実際には、各更新あたり複数のスナップショットを使用して繰り返し更新を実施することができる。その場合、この実施形態は、各更新あたりに存在するスナップショットと同数の推定信号スナップショットを生成する。
【0154】
この実施形態では、式(50)、(52)および(58)は指数関数的に減衰するウインドウ、すなわち忘却係数を使用して処理を重みづけしたウィンドウを形成する信号から生成される統計量を表す。図1〜17に関連して説明した第1の例の移動ウィンドウアプローチに関しては、統計量は矩形のウィンドウから生成される。式(51)、(53)〜(56)、および(59)〜(62)は、第1の実施形態と同じ処理である。高次ステージにおいてだけBLISSのテンソルバージョンが使用される。これにより、4次統計量を更新することが可能になる。
【0155】
臨床医による脳波図(EEG)測定結果の解析は、例えば癲癇、脳腫瘍、脳損傷などの脳機能不全を診断するために十分に確立された技術である。しかし、実際には、この解析は非常に困難なものになり得る。その理由は、EEG測定結果が、不要な電気的干渉(アーチファクト)により重大な影響を受けやすい微弱な電気信号を発生するからである。このような干渉は、眼球の移動および/またはまばたき(眼のアーチファクト)、患者の筋肉の動き、ならびに主電源による干渉などのソースから生じる。
【0156】
BSSアプローチを使用して不要な干渉を抑制することによって、EEGデータ中の関心のある信号を分離することができる。所望のEEG信号が反復的(「擬似連続的(pseudo−continuous)」)であるときは、追跡BBS法を使用してそれらを追跡することができるので、長期間の監視が可能になる。癲癇発作を繰り返す患者から臨床EEGデータを取得することができる。これらのデータは、反復的なEEG信号、すなわち時間に対するEEG電圧を発生する。これらのデータは、従来は、8つの頭皮電極を患者に貼り付け、EEG装置を用いて電極電圧を監視することによって取得していた。EEG信号は、干渉によって雑音が混入した繰り返しの癲癇発作信号から構成されていた。信号中の癲癇発作を推測することはできたが、干渉のために確実には識別することができなかった。例えば、8つの信号のいずれかの信号の極大を数えただけでは、発作の正確な回数は得られなかった。本発明の繰り返し追跡実施形態をEEG信号に適用して推定信号を提供することができる。5秒間にわたる取得ステージが使用され、各更新は256Hz、すなわち128デ−タサンプルを生成するのに0.5秒のサンプルレートで、128のデータスナップショットからなるそれぞれのセットを使用して生成された。推定された信号には信号のスワップが存在せず、干渉よりも大きな振幅の容易に識別可能なスパイクによって示される繰り返しの癲癇発作が示されている。信号対干渉および雑音比はスパイクの高さの変化に応じて3〜6の範囲となる。
【図面の簡単な説明】
【0157】
【図1】本発明の方法を示す概略構成図である。
【図2a】信号分離の各ステージを示す信号散布図である。
【図2b】信号分離の各ステージを示す信号散布図である。
【図2c】信号分離の各ステージを示す信号散布図である。
【図2d】信号分離の各ステージを示す信号散布図である。
【図3】本発明の方法を示す構成図である。
【図4】胎児のECG解析における信号スワッピングを示す図である。
【図5】本発明で使用される更新処理を示すベクトル図である。
【図6】2つのほぼ独立な信号の散布図である。
【図7】母体および胎児のECGデータを用いて本発明の信号分離を示す図である。
【図8】特定の信号に対象を絞り込むように構成された本発明の方法を示す構成図である。
【図9】双生児の妊婦の外部腹部電極を用いて得られた、信号分離前のECGデータを示す図である。
【図10】本発明を用いて図9のデータから信号を分離して得られた結果を示す図である。
【図11】図9のデータにおける双生児の胎児のECG信号に対象を絞り込むように構成された本発明の方法を用いて得られた結果を示す図である。
【図12】信号分離前の単生児の胎児ECGデータを示す図である。
【図13】図12のデータのECG信号に対象を絞り込むように構成された本発明の方法を用いて得られた結果を示す図である。
【図14a】信号スワッピングの修正の前後で相互相関された信号の擬似3次元プロットを示す図である。
【図14b】信号スワッピングの修正の前後で相互相関された信号の擬似3次元プロットを示す図である。
【図15】胎児ECG監視を実施するのに適した電極装置を概略的に示す図である。
【図16】患者が横たわっているマットレスの下のセンサを用いて得られた、信号分離前の心拍/呼吸データを示す図である。
【図17】本発明を使用して図16のデータから信号を分離して得られた結果を示す図である。
【技術分野】
【0001】
本発明は動的ブラインド信号分離、すなわち、とりわけ非定常環境で使用することができるブラインド信号分離、ならびにそれを実施するための方法、装置、およびコンピュータプログラムに関する。
【背景技術】
【0002】
近年、ブラインド信号(または信号源)分離(BSS)が信号処理の重要な分野として登場してきた。現在、ブラインド信号分離は生態臨床医学、財務分析、音声認識、電気通信などの用途で有効に使用されている。
【0003】
BSSの目的は、センサを用いて雑音や不要な干渉とともに検出された、各信号源からの混合信号の観測だけを前提として、いくつかの統計的に独立な信号を回復または分離することである。「ブラインド」という用語は、個別の信号源またはそれらが組み合わされた方法に関して、以前の情報(例えば、波形、周波数、帯域幅、位置など)がまったく使用できないことを示すために使用される。
【0004】
「ブラインド」という用語は、このような技術に関連づけられることが多いが、信号分離が達成できるために満たすべきいくつかの仮定が存在する。混合条件、すなわちセンサでの信号の結合処理は、線形かつ時不変(time−invariant)でなければならない。時不変という用語は、センサアレイで受信された信号の空間統計(組合せ)が時間とともに変化しないことを意味する。本発明に関する、結合処理の他の仮定は、信号がセンサに同時に到着するということである。この仮定は、瞬時混合(instantaneous mixing)の場合と呼ばれる。
【0005】
結合(混合)プロセスが線形、瞬時的、かつ時不変のときは、この問題に対する多くのBSS法が開発されてきた。これらの方法には、以下のようなものがある。
− I.J.Clarkeによって開発され、以下に記載されたブラインド信号分離(BLISS)アルゴリズム。J.G.McWhirter、I.J.Clarke、およびG.Spence、「Multi−linear algebra for independent component analysis」、SPIE’s 44th Annual Meeting、The International Symposium on Optical Science、Engineering and Instrumentation、Denver USA、18〜23rd July、1999。
− J.F.Cardoso、およびA.Souloumiac、「Blind beamforming for non−Gaussian signals」、IEE proc−F、Vol.140、no.6、pp.362〜370、Dec 1993に記載されたJADE(Joint Approximate Diagonalisation of Eigenmatrices)アルゴリズム。
− T.Blaschke、およびL.Wiskott、「An Improved Cumulant Based Method for Independent Component Analysis」、Proc.Int.Conf.on Artificial Neural Networks、ICANN’02.2002。この参考文献は3次統計量の使用に関するものであり、BLISSの代替方法である。また、この方法はBLISSやJADEに類似したブロックベースの技術である。
【0006】
国際公開第03/028550A2号パンフレットは、母親に外部から貼り付けられた腹部電極を使用して胎児のEGC信号を監視するBLISSの特定の応用例を開示している。電極信号はフィルタされ、独立成分分析(Independent Component Analysis、ICA)に基づくBSS技術で処理される。I.J.Clarke、「Direct Exploitation of non−Gaussianity as a Discriminant」、EUSIPCO ’98、Rhodes、Greece、8〜11 September、1998。
【0007】
国際公開第01/17109号パンフレットは、データをウィンドウ操作し、離散フーリエ変換を適用し、その結果を相互相関させることによるBSSを開示している。次に、最急降下法(gradient descent method)を使用して、混合された信号を分離する有限インパルス応答フィルタを定義する。米国特許第6321200号明細書(Casey)は、フィルタバンク分析を用い、結果として得られたデータをウィンドウ操作して多次元観測行列を生成し、行列の次元を圧縮し独立成分分析を用いて処理することによって混合信号から特徴抽出する方法を開示している。国際公開第03/090127号パンフレットは、4次キュムラント(cumulant)を使用したBSSを開示している。ディスジョイント(disjoint)直交信号のBSSは、A.Jourjine et al.、Proc.2000 IEEE Conference on Acoustics,Speech and Signal Processing、2000 ICASSP’00、5〜9 June 2000、Istanbul Turkey、Vol.5、pp 2985〜2988に開示されている。
【0008】
非定常条件を適用するとき、通常は非定常性に対処することが従来技術の目的ではないので、いくつかの従来技術のBSS法が検出し分離することができる信号の精度は制限される。これは、分離処理において信頼して使用できるデータの量が限られており、統計ベースのパラメータの推定値は正確でない可能性があるからである。さらに、(例えば、何時間にもわたる)大きなデータセットの処理は不可能である。これらの制限が、非定常問題のためのBSS法開発のきっかけとなった。このような方法には、次のようなものがある。
− 独立成分分析(ICA)のためのパーティクルフィルタ(particle filter)。R.M.EversonおよびS.J.Roberts、「Particle filters for non−stationary ICA」、Advances in Independent Components Analysis、Eds.M Girolami、Sprinter、pp.23〜41、2000。
− EASI(等価適応信号源分離(Equivariant Adaptive Source Separation))アルゴリズム。J.F.CardosoおよびB.Laheld、「Equivariant adaptive source separation」、IEEE Trans.on Signal Processing、vol.44、no 12、pp.3017〜3030、Dec.1996。
− カルマンフィルタアプローチを用いた自然勾配アルゴリズム(Natural Gradient Algorithm、NGA)。M.G.Jafari、H.W.SeahおよびJ.A.Chambers、「A Combined Kalman Filter and Natural Gradient Algorithm Approach for Blind Separation of Binary Distributed Sources in Time−Varying Channels」、IEEE conference on Acoustics,Speech and Signal Processing、Vol.5、pp.2769〜2772、May 2001。
− ブラインドデミクシング(demixing)アルゴリズム。Z.MarkowitzおよびH.Szu、「Blind Demixing Real−Time Algorithm of Piecewise Time Series」、Internal Joint Conference on Neural Networks IJCNN’99、Vol.2、pp.1033〜1037、1999。
【0009】
パーティクルフィルタリングは信号処理の比較的新しい領域であり、信号を追跡するためのロバストな方法を提供する。しかし、その計算コストのために、実時間BSSでのその使用は非現実的である。
【0010】
これに対して、EASIや(カルマンフィルタを用いた)NGAアルゴリズムは、はるかに計算上効率的である。これらの技術はそれぞれ、統計的アプローチおよび自然勾配アプローチを利用する。これらの技術は収束が遅くなる傾向があり、非定常環境ではゆっくり変化するシステムを追跡するためだけに適するものである。
【0011】
別法として、よりロバストな技術は(前述のBLISSやJADEなどの)「ブロック」アルゴリズムを使用するが、移動ウィンドウアプローチにおいて使用されるものである。ウィンドウという用語は、データの区分または「ブロック」のために使用される。データウィンドウが一連のセクションとして記録されたすべてのデータを時間内にカバーするように進み、各ウィンドウ位置で信号が分離されるものと想定されている。これらのブロックアルゴリズムは、データのブロックまたはウィンドウを相互に分離して処理する。これらのアルゴリズムはブラインドデミクシングにおいて使用することができ、以下のことを想定している。
− データの各ウィンドウは信号混合プロセスについての十分な情報を含み、信号の信頼できる推定値を得ることができる。
− 定常的混合条件が局所的に適用される。すなわち、各ウィンドウおよび隣接ウィンドウにおいて混合パラメータはゆっくり、滑らかに変化するものとする。
【発明の開示】
【発明が解決しようとする課題】
【0012】
移動ウィンドウアプローチを使用することに関する主要な問題は、「信号スワッピング」と呼ばれている。この問題は、順序が識別できない連続するウィンドウにおける、異なる順序の混合されていない信号から生じる。すなわち、最初のウィンドウでは、123456の順序で1〜6まで番号づけされた6つの信号を分離するように処理され、直後のウィンドウの処理では、これらの信号が413562など異なる未知の順序で生じる可能性がある。したがって、結果として生じる観測信号は、恐らく異なるソース信号からからランダムに集められた部分を含むことになる。連続信号の監視を可能にするために信号を正しく並べ直すことは、処理が困難か、現実的でないか、あるいは不可能な場合がある。
【0013】
ブラインドデミクシングアルゴリズムは、信号を並べ替えるための信号統計に関する事前の知識を仮定することによってこの問題を解決する。しかし、多くの用途では、信号統計はウィンドウごとに変化する。また、それらが未知のこともある。
【0014】
さらに、パーティクルフィルタリングの場合には、移動ウィンドウ技術の計算コストのために、実時間BSS処理のためのその技術を使用することが現実的でなくなる可能性がある。
【0015】
本発明の目的は、信号分離の代替方法を提供することである。
【課題を解決するための手段】
【0016】
本発明は、データのウィンドウに関連する信号の処理を含む動的ブラインド信号分離のための方法であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを含むペアに対して、各先行するウィンドウに関連して得られた結果を用いて後続のウィンドウを処理し、それによってそれぞれの後続のウィンドウに関連する信号の直交性および独立性の個別の初期化を実施して後続のウィンドウの近似結果を求めること、および
b)近似結果を処理して信号分離を達成すること
を含むことを特徴とする方法を提供する。
【0017】
本発明は、通常は従来技術のブロックアルゴリズムより迅速にデータを処理することができるという利点を提供する。その理由は、初期化により(最初のデータウィンドウ以外の)各データウィンドウのフル解析を実施する必要性が回避され、結果として計算が削減されるからである。これは、胎児の心拍監視などの用途で特に重要である。この用途では、緊急の場合に臨床介入(clinical intervention)を可能にするために可能な限り実時間に近い処理が望ましい。さらに、後述するように、直交性と独立性を個別に初期化することにより2ステージBSSに関連する問題が回避される。その問題とは、2ステージBSSの場合は、信号が正規化され、したがって適切に更新できなくなる可能性があることである。本発明は、先行ウィンドウの結果が後続ウィンドウの処理で使用可能であるような、時間に関して十分にゆっくり変化する監視システムに適用可能である。
【0018】
近似結果の処理は、小さな更新を用いて直交性を更新し、それによって無相関化を実現することを2次統計手順に組み込むことができる。直交性の更新は、ヤコビ(Jacobi)法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって実施することができる。
【0019】
この方法は、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化された信号の独立性を初期化する第2のステージの初期化を含むことができる。この第2のステージは、2次統計手順よりも高次の統計手順において、独立成分分析(ICA)を用いて小さな回転更新を初期化された信号に適用して信号の独立性および分離を実現する。2次統計手順よりも高次の手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0020】
この方法は、信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズにおいて実施することができる。
【0021】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0022】
この方法は、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを含むことができる。直前の結果は、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる。スナップショット結果を直前の処理結果と組み合わせる前に、直前の結果に忘却係数(forget factor)を用いて重みづけして指数関数的に減衰する後続のウィンドウを実施することもできる。
【0023】
第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階のテンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。
【0024】
スナップショット結果は平均スナップショットベクトルおよびスナップショット共分散行列を含み、さらに4階のテンソル更新としてモーメントを求めるための信号ベクトルを提供する無相関化され(decorrelated)正規化されたスナップショット等価量を含むことができる。また、スナップショット結果を直前の結果と組み合わせる前に、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを生成することができる。ただし、0<p<1である。
【0025】
他の態様において、本発明はデータのウィンドウに関連する信号を処理するようにプログラムされた動的ブラインド信号分離のためのコンピュータ装置であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えたペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施して後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ようにプログラムされることを特徴とするコンピュータ装置を提供する。
【0026】
このコンピュータ装置は、小さな更新を用いて近似結果の直交性を更新し、それによって2次統計手順における無相関化を実現するようにプログラムすることができる。このコンピュータ装置は、ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって直交性を更新するようにプログラムすることができる。
【0027】
このコンピュータ装置は、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するようにプログラムすることができる。この第2ステージは、2次統計手順よりも高次の統計手順において、初期化されたデータに小さな回転更新を適用して信号の独立性および分離を実現するためのICAを含む。2次統計手順よりも高次の手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0028】
このコンピュータ装置は、信号を分離し分離した信号の中から所望の信号を識別する取得フェーズ、および所望の信号だけを分離処理する後続のフェーズを実施するようにプログラムすることができる。
【0029】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0030】
このコンピュータ装置は、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となるようにプログラムすることができる。このコンピュータ装置は、スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するようにプログラムすることもできる。第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階のテンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。
【0031】
スナップショット結果は、平均スナップショットベクトルおよびスナップショット共分散行列を含むことができる。また、このコンピュータ装置は、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するようにプログラムすることができる。
【0032】
他の態様において、本発明は、データのウィンドウに関連する信号を処理することを含む動的ブラインド信号分離のためのコンピュータソフトウェアであって、コンピュータ装置を制御して
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えるペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施して後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ための命令を含むことを特徴とするコンピュータソフトウェアを提供する。
【0033】
このコンピュータソフトウェアは、小さな更新を用いて近似結果を処理し、それによって直交性を更新して2次統計手順における無相関化を実現するための命令を含むことができる。このコンピュータソフトウェアは、ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することによる対称行列の対角化に関係する技術によって直交性を更新する命令を含むことができる。
【0034】
このコンピュータソフトウェアは、各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するための命令を含むことができる。この第2ステージは、2次統計手順よりも高次の統計手順において、ICAを用いて小さな回転更新を初期化されたデータに適用して信号の独立性および分離を実現する。2次統計手順よりも高次の統計手順は、3次および4次統計手順の少なくとも一方であってもよい。
【0035】
このコンピュータソフトウェアは、信号が分離されその分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するための命令を含むことができる。
【0036】
ウィンドウに関連する信号は、ウィンドウ中のデータの統計的尺度であってもよい。
【0037】
このコンピュータソフトウェアは、データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる命令を含むことができる。このコンピュータソフトウェアは、スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するための命令を含むことができる。
【0038】
第1の結果は、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことができる。スナップショット結果は平均スナップショットベクトルおよびスナップショット共分散行列を含むことができる。このコンピュータソフトウェアは、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルと4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし、直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するための命令を含むことができる。
【0039】
本発明をより完全に理解できるように、次に本発明の実施形態について添付の図面を参照しながら説明する。
【発明を実施するための最良の形態】
【0040】
図1を参照すると、本発明の動的ブラインド信号分離(BSS)システム10は2つの信号源11および12からの信号を監視するように構成されている。図示されているように、システム10は、信号源11および12の両方からの出力信号15の受信に応答して電気信号を生成する3つのセンサ14A、14B、および14C(まとめて14)を備えるが、本発明の実際の応用例ではより多くのセンサを使用することもできる。本発明の1つの重要な用途は、胎児の心電図(胎児のECG)を非侵襲的(non−invasively)にモニタすることである。この用途は妊婦の腹部に貼り付けられた外部電極の形のセンサを使用する。このことは、国際公開第03/028550号パンフレット(以下「W550」)に記載されている。このパンフレットには、グランドと基準電極に加えて12個までの信号電極が記載されており、それぞれの信号チャネルを規定している。このパンフレットを本実施形態のベースとして使用する。このパンフレットは、単生児の妊婦に対する単一の胎児ECG、または双生児、三つ子などに対する複数の胎児信号の分離に関係している。
【0041】
センサ14はシステム10のデータ取得ステージ16に入力信号を提供する。そのステージでは、入力信号は、およそ500セットサンプル/秒の割合で、セット単位でサンプルされる。次に、各サンプルはデジタル化され記録される。サンプルの各セットは各センサ14からのそれぞれのサンプルからなり、各セットのサンプルはほぼ同時に記録される。記録された後で、これらの信号は信号分離ステージ17に送られ、そのステージでこれらの信号は処理されてソース信号15に対応する分離された、または混合されていない信号が生成される。分離された信号は解析ステージ18に送られ、そのステージで、分離された信号が解析されて胎児ECG信号、母体ECG信号、および雑音が区別される。
【0042】
胎児ECG監視で記録された信号の構造は複雑である。なぜならば、必要な胎児ECG信号が、はるかに強い母体ECG信号や筋肉雑音などの干渉信号の影響を受けるからである。代表的な従来技術のBSS法は、従来技術のBSS仮定が当てはまる比較的短いデータのセクションまたは時間ウィンドウに制限される。しかし、比較的長い期間にわたって信号が分離され監視されることを求める、良く知られた長い間の切実な要求が存在するが、そのためには、対応する従来技術の方法では十分ではない。
【0043】
取得ステージ16からのデータは、各センサ14からの信号をデジタル化することによって得られるデジタル信号からなる一連のデータ「ウィンドウ」と呼ばれるものとして処理され、代表的な信号は2,000〜3,000信号サンプルから構成することができる。各ウィンドウは部分的にその前のウィンドウとオーバラップさせることができる。すなわち、後述するように、サンプルのセットは両方に共通していてもよい。データウィンドウはデータブロック中の一連のウィンドウ位置によって進み、信号は各ウィンドウ位置ごとに分離され、最終的に全データブロックが処理されるものと想定される。最初のデータウィンドウは、信号分離ステージ17でBLISSまたはJADEなどのブロックモード法によって処理される。このことについてより詳細に説明する前に、各ウィンドウに対する信号モデルを確立し、そのモデルによってBSSを使用する。
【0044】
胎児ECG解析においては、セットあたりの信号サンプルの数は通常、信号電極の数、すなわちグランドおよび基準電極を除いた電極数に等しいと見なされる。
【0045】
BSSに関して、それぞれの信号電極からのm本のデジタル信号を有し、各信号がn個のサンプルを有するデータウィンドウ番号kの適切な(ノイズのない)データモデルは、
Xk=AkSk (1)
で与えられる。ただし、Xkはウィンドウ番号k内のデータからなる(m×n)の行列であり、その各行は(各々が1組のm個のデ−タサンプルとして表された)それぞれの信号である。SkはXkと類似した種類の(m×n)データ行列であるが、混合されていない信号、すなわち分離され、個別のソース信号15に対応する信号を表す。また、Akは(m×m)の混合行列であり、ソース信号15を組み合わせて、電極によって受信される、Xkに対応した混合信号を形成するための変換を表す。式(1)によって表される各ウィンドウの混合モデルは、線形で、瞬時的(instantaneous)で、時不変であると想定する。また、取扱いが便利であり必要な結果に影響を与えないので、各ウィンドウ内のデータは、ゼロ平均を有する(あるいは、実際には、各データは各データのサンプルから平均を減算することによってゼロ平均に変換できる)ものと想定する。
【0046】
BSSで解決すべき信号分離問題は、データ行列Skによって表される信号を(並べ替えによって)回復または非混合化することである。このことは、逆混合行列
【数1】
すなわち、Akの逆行列を求め、式(1)の両辺に前から掛けることによって実施することができる。すなわち、
【数2】
【0047】
k番目のデータウィンドウに対する式(2)は、直後のまたは(k+1)番目のウィンドウ用として書き直すことができる。すなわち、
【数3】
【0048】
逆混合行列
【数4】
を求めるために、BBSアルゴリズムは2つのステージを使用することができる。第1のステージは、2次統計量だけを使用し、信号を非相関化し正規化するものである。第2のステージは、通常は4次統計量を利用し、(第1のステージで得られた)非相関化され正規化された信号を独立にする。
【0049】
各ウィンドウにおいてこれら2つの処理が効率的かつ効果的に実施されるように、この追跡法はいくつかの重要な機能を有する。最初の2つの機能は、初期化および更新処理である。
【0050】
「初期化」という表現は、直前のデータウィンドウの混合行列に関する情報が現在のウィンドウの信号を初期化するために使用されることを意味する。この初期化には、初期化された信号をほぼ分離するという効果があり、したがって信号を非混合化するための完全な計算は必要でなくなる。この例では、信号自体が初期化されるが、実際には、そうすることは必須ではない。代わりに、中間的量を初期化することも可能である、すなわち、データから得られたパラメータ、例えば(後述する)共分散行列などデータの統計的尺度を代わりに初期化することも可能である。現在のウィンドウの混合行列を求めるために、初期化された信号は、初期化なしの場合に必要な量よりもより少ない量の更新しか必要としない。さらに、後で詳述するように、初期化を小さな更新と組み合わせることによって、信号スワッピングの問題を防止することもできる。
【0051】
現在のウィンドウ内の信号は、
【数5】
を使用して初期化できるものと考えられる。したがって、Sk+1に対する最初の近似
【数6】
は、Xk+1に
【数7】
ではなく
【数8】
を掛けること、すなわち
【数9】
によって提供される。
【0052】
式(4)によって提供される、推定された
【数10】
は、Xk+1よりも所望の値であるSk+1により近くなるはずである。しかし、(上述の)2ステージBSSアプローチでは、推定された各信号は同一のパワーを有するように正規化される。したがって、第1のステージ(無相関化)では、信号を更新することはできない。このことについては後で説明する。正規化処理が「実施されない」場合でも、無相関化処理を更新することによりそれ以前のステージの効果が取り消される。説明する本発明の実施例の特徴は、非混合化行列の対応する2次および高次成分を別々に更新することによってこの問題を回避することである。
【0053】
本実施例においては、後でより詳細に説明するように、初期化処理は2ステージで実施される。すなわち、これらのうちの第1のステージでは、信号の直交性が初期化され、次いで無相関化法を用いて信号の直交性が更新される。これによって信号は直交化される。次いで、第2ステージで信号の独立性が初期化され、高次統計ステージを用いて信号の独立性が更新される。これによって信号は独立になる。
【0054】
上述の第1のステージにおいて、1つの選択肢は(m×n)の行列Xkに関して無相関化法および正規化法を実施することである。これは、特異値が降順に配列されるときは特異値分解(SVD)と呼ばれることがある(M.MoonenおよびB.De Moor、「SVD and Signal Processing,III Algorithms,Architectures and Applications」、ASIN:0444821074、Elsevier 1995)。しかし、このような方法で信号を配列することは困難である。なぜならば、信号パワーがウィンドウごとに変化し、信号の再配列につながる可能性があるからである。したがって、信号のスワッピングが生じる可能性がある。すなわち、この処理は、実際には異なる信号のセグメントがつなぎ合わされた見かけ上の信号を生成する場合がある。本明細書では、信号がそのパワーに従って配列されることがないので、SVDより無相関化および正規化という用語の方が好ましい。
【0055】
データ行列Xkの2次分解は、次式で表すことができる。
【数11】
上式で、Ukはデータ行列の共分散行列
【数12】
の固有ベクトルを含む(m×m)のユニタリ行列であり、Vkは
【数13】
の固有ベクトルを含む(n×n)のユニタリ行列である。
【0056】
【数14】
または
【数15】
における上付きインデックスTは行列XkまたはVkの転置を示すものであり、Σkはその対角上に特異値(固有値の平方根)を備え、対角以外のすべての位置にゼロを備えた(m×n)の対角行列を示す。これらの特異値は必ずしも降順に配列されている訳ではなく、これらの特異値は、両方が対応するデータへの関連する固有ベクトルの相対的寄与率を示すものである。
【0057】
Ukの各列はそれぞれ直交正規特異ベクトルである。すなわち、それらはソース信号15の混合を示す空間ベクトルである。
【0058】
【数16】
の各行は、ソース信号15の推定値である直交正規特異ベクトルであるが、一般にこれらの推定値はソース信号の完全に分離されたバージョンではない。なぜならば、完全に分離するためには、それらがさらに相対的な回転を必要とするからである。無相関化によってソース信号を完全に分離することはできない。なぜならば、この無相関化は分解されたベクトルを相互に直交化する、すなわち相互に無相関にする2次無相関化だからである。本発明の多くの応用例では、信号の空間特性(位置)は類似している。したがって、それらの空間特性を異なるものにする解決策は、信号の分離に成功しないはずである。
【0059】
このような信号分離の失敗が図2に示されている。図2は、いわゆる「散布図」と呼ばれるものである。この図では、4つのプロット(a)〜(d)の垂直軸には第1の信号がプロットされ、水平軸には第2の信号がプロットされている。プロット上のポイントは正方形と長方形によって示され、それぞれの時間(サンプル時間)における2つの信号の値を表す。プロット(a)〜(d)は、混合および非混合の様々なステージの信号を示す。プロット(a)は2つのソース信号15の散布図であり、これらのソース信号15は(説明の都合上)ランダムな一様分布の信号と想定している。
【0060】
プロット(b)は、ソース信号の混合信号、すなわち混合後であるが非混合化処理前の2つの信号の散布図である。この図は、混合プロセスが伸張(stretching)、せん断(shearing)、および回転の複雑な組合せに対応していることを示している。プロット(c)は、プロット(b)信号の無相関化および正規化によって得られた2つの信号の散布図である。信号のこのような無相関化および正規化は、統計用語で2次に限定された処理方法を適用することによって得られる。すなわち、この方法は伸張とせん断が除去された推定信号を提供する。しかし、プロット(a)と(c)を比較すると、(c)の推定信号が(a)に対して回転されていることがわかる。すなわち、2次の方法は回転を除去することはできない。したがって、推定信号は未知の回転行列によってソース信号15と関連づけられており、プロット(c)の推定信号を回転して適切な分離信号を得るためにはこの行列を求めることが必要になる。プロット(d)は、プロット(c)の2つの信号を回転することによって得られた2つの信号を示す。回転だけを生成する処理は、せん断または伸張を生成しない。したがって、2次の方法によって得られた結果を是正することはない。回転は、散布図(d)の端部を座標軸(図示せず)に合わせるように選択される。正確な回転は、次に説明するより高次の統計を使用して決定される。ここで「高次」とは、2次よりも高い次数を意味する。
【0061】
信号分離において、未知の回転行列の決定は統計的独立条件を満たすことができる。数学的には、m本の信号x1〜xmの統計的独立性は、信号の結合確率関数p(x1...xm)を信号の結合確率関数p(xi)の積に因数分解する機能として表すことができる。すなわち、
【数17】
【0062】
この処理は高次統計量(HOS)を使用する。未知で独立な信号を分離するためのHOSの使用は、独立成分分析(ICA、通常は2次およびより高次の統計量に関係している)と呼ばれることが多い。この処理が、本実施例における分離処理の第2のステージである。
【0063】
式(5)から、非ゼロ特異値に関するデータだけを使用して、Xkは
【数18】
と表すことができる。ただし、
【数19】
はUkの最初のm列からなる(m×m)の行列であり、
【数20】
は
【数21】
の最初のm行からなる(m×n)の行列である。また、
【数22】
は、k番目のウィンドウのデータ行列Xkの特異値を含む(m×m)の行列である。図2(c)および(d)から、
【数23】
内の信号ベクトルは、回転によってソース信号15に関連づけられている。したがって、(m×m)のユニタリ回転行列Rkを
【数24】
に適用することによって、非混合化または分離されたソース信号15の推定値が生成される。しかし、この適用は、Iを単位行列として、
【数25】
が成り立つような、大きさが等しく逆方向の(m×m)の逆回転行列
【数26】
が同時に導入されない場合には、無相関化と正規化によって以前に得られた結果を許容できないほど変化させる。
【0064】
【数27】
を
【数28】
に掛けることによって、Xkに関する次式の表現が得られる。
【数29】
【0065】
式(7)において、積
【数30】
は混合行列Akの推定値であり、積
【数31】
はそれぞれの推定信号である各行を含む行列である。
【0066】
【数32】
の各推定信号は正規直交する、すなわち直交し、同一のパワーを有するように正規化されるが、相対パワーは推定混合行列Akに格納される。この正規化の態様は、ブラインド信号分離処理に対する2次ステージのアプローチに固有のものである。
【0067】
Rkは、ペアごとの回転の繰り返しシーケンスを用いて計算される(このことについては後述する)。各回転は、対応するペアごとのコスト関数によって評価されたときに、(
【数33】
から取り出された)信号のそれぞれのペアの統計的独立性を最大にするように設計される。この最大化のプロセスにおいて、BLISSおよびJADEアルゴリズムは高次統計ステージのための4次統計量を使用する。本実施形態では、BLISS高次統計ステージを使用する。
【0068】
各ウィンドウに関して、主要な目的は式(7)に含まれるパラメータを計算することである。各ウィンドウが、従来技術のように個別に処理される場合は、各ウィンドウに対する結果は個別に決定されることになる。すなわち、k個のウィンドウを使用する場合の計算コストは、単一のウィンドウの計算コストのk倍になる。このコストは、ウィンドウの数が大きい場合、例えばウィンドウの数が>20で、ウィンドウあたりの各信号が2,500サンプルを有しているような場合には非現実的なものになる。しかし、前述のように、各ウィンドウで得られた結果を後続のウィンドウの分離処理の初期化で使用することによって、必要な処理を削減できることが知られている。この初期化により、データは所望の結果により近い中間形式に変換され、処理が削減される。初期化により、分離された信号により近い信号がもたらされ、信号統計量の完全な計算が不要になる。この方法を可能にするために、混合行列Akが定常的である必要はないが、本発明の目的のためには、時間とともに比較的ゆっくりと変化する必要はある。
【0069】
BSS問題について論じてきたが、次にAkを用いて信号を初期化することが実現可能でないことを示すことができる。例えば、インデックスkの代わりに(k+1)を代入し、k番目のウィンドウの混合行列Akの推定値の逆行列である
【数34】
を両辺に乗じ、行列の逆行列を転置行列で置き換えることによって式(7)を書き直すと、次式が得られる。
【数35】
【0070】
式(8)において、
【数36】
は未知であり、データから推定する必要がある。
【0071】
【数37】
およびRkはユニタリ行列であり、したがって
【数38】
および
【数39】
が成り立つ。ただし、Iは単位行列を表す。Akがゆっくり変化する場合は、
【数40】
および
【数41】
が成り立つ。これら3つの近似式を用いると次式が得られる。
【数42】
【0072】
近似式(9)の右辺において、積
【数43】
は、それぞれが推定信号である行を含む行列である。これらの信号は初期化され、ほぼ正規直交化される。すなわち、ほぼ直交するとともに等しい信号パワーを有しており、無相関化法を用いた移動ウィンドウICAによって処理することができる。しかし、これらは式(5)の無相関化および正規化の方法を用いて得られ、この方法は信号パワーに基づいて正規化されていない信号同士を区別する。このような区別のために、式(5)の無相関化処理は一層困難なものになる。(以下で説明するように)データウィンドウ初期化処理が好ましい。この処理は、着信信号の直交性、すなわち(k+1)番目のデータウィンドウの直交性は初期化するが、それらの信号の正規化は行わない。
【0073】
この実施例は、各々が個別の初期化処理を含む2つの別々のステージで実施される。すなわち、これらのステージの第1のステージでは、k番目のウィンドウ行列
【数44】
を信号に適用することによって各信号の直交性が初期化され、次いでそれらの直交性は、無相関化法を用いて、(k+1)番目のウィンドウのデータを反映するように更新される。これにより、信号は直交する。次に、第2のステージでは、k番目のウィンドウの回転行列Rkをそれらに適用することによって信号の独立性が初期化され、次いで、高次の統計量を用いてそれらの独立性が更新される。これにより各信号は独立になる。
【0074】
図3は、本実施例における信号分離の構成図である。この図はこの実施例を要約するものであり、この例を理論解析と関連づけるために、後で提供される各式が参照される。k番目のデータウィンドウの処理により、行列
【数45】
およびRkの形の初期化情報がもたらされる。21で、行列
【数46】
が入力され、22で、式(16)を用いて直後の(k+1番目)のウィンドウ内のデータの直交性を初期化するために使用される。初期化されたデータは、23で式(18)を用いて小さな更新角度で無相関化される。この場合、「小さな」とは複数の可能性が使用可能であり、より小さなまたは最小の角度が選択されることを意味する。ステップ23は「ヤコビ法」と呼ばれる技術を使用する。この技術は、Adaptive Filter Theory (3rd Edition)、S.Haykin、1996に記載されている。「更新」という表現が使用されるのは、この表現が、ステップ23がステップ22で得られた結果を調整し、したがってk番目のデータウィンドウに基づく部分的な信頼から、後続の(k+1)番目のデータウィンドウに基づくより完全な信頼に結果が更新されるという事実を反映するからである。ヤコビ法は、(k+1)番目のウィンドウのデータ行列Xk+1の共分散行列を対角化することを含む。共分散行列は対称行列である。ステップ22と23は一体で統計用語で言う2次ステージの処理を形成し、直交正規(直交し正規化された)信号を生成する。
【0075】
行列Rkは24で入力され、25で直交正規信号に適用され、式(26)を用いてそれらの信号を初期化する。次に、初期化された直交正規信号は、27で回転により分離される。この回転による分離は、高次統計量と式(29)を用いて小さな角度更新でICAによって実施される。ここでもやはり、「小さな」は複数の可能な更新角度が使用可能であり、より小さい/最小の角度が選択されることを意味する。ステップ25および27は一体で、統計用語で言う高次ステージ処理となり、出力28で分離信号を生成する。
【0076】
多くの無相関化ルーチンにおいて、各信号はペアごとの回転の繰り返しシーケンスを用いて直交化される。これらの回転はそれぞれ、対応するペアごとの(2次)コスト関数によって評価されたときに、所与の信号ペアの直交性を最大にするように設計される。ヤコビ法では、このことは、上記のHaykinの参考文献に記載されたGivenの回転を用いて、対称行列を対角形に変換することによって達成することができる。例えば、2信号の場合には、ヤコビ法を使用する目的は、(n×1)ベクトルとして表された2つの信号x1およびx2の(2×2)に関する共分散行列X12を対角化することである。この行列はHaykinにより次式で与えられる。
【数47】
【0077】
この対角化は、式(10)の共分散行列を回転行列Qを用いて回転させ、(2×2)の行列Bを繰り返し形成してBの非対角要素をゼロにすることによって実施される。すなわち、
【数48】
【0078】
Givenの回転の各繰り返しにおいて、回転行列Qは対称行列X12の非対角要素を最小にするように決定される。行列X12が完全に対角になったとき、すなわち、そのすべての非対角行列要素がゼロになったとき、その行列が表す信号は互いに直交したことになる。このことは、式(11)で単にb12をゼロに設定し、これを満たすΘの値を決定することによって達成される。Bは対称行列である。したがって、b12=b21であり、Θをb12=0となるように決定することだけが必要である。b12およびb21をゼロに等しくすることによって信号x1およびx2を直交させることになり、したがってBは対角行列になる。したがって、Bの対角化はベクトルを直交させるための必要条件になり得る。
【0079】
式(7)を用いると、Xkの共分散行列
【数49】
が形成される。すなわち、
【数50】
【0080】
Rkがユニタリ行列であり、
【数51】
の各行に含まれる信号の推定値が互いに直交するので
【数52】
が成り立つ。
【0081】
したがって、
【数53】
となる。上式で、
【数54】
は(m×m)の対角行列であり、その対角要素はXkの固有値である。
【0082】
(k+1)番目のウィンドウについて、式(14)のkを(k+1)と書き直すと、共分散行列
【数55】
は、次式で表される。
【数56】
【0083】
新たに無相関性を計算することを避けるために、共分散行列
【数57】
は、直前のまたはk番目のウィンドウのために得られた
【数58】
を前から掛け、
【数59】
を後から掛けることによって初期化される。すなわち、
【数60】
【0084】
式(16)は、k番目のデータウィンドウで得られた結果を用いて
【数61】
が、データ行列Xk+1の共分散行列
【数62】
内の情報または信号またはベクトルの直交性を初期化することを表す。共分散行列
【数63】
で表された信号は、明示的にはデータ行列Xk+1の信号ではないが、データ行列Xk+1の信号から導かれたものである。したがって、本明細書で使用される「データウィンドウに関連する信号」という表現および類似の表現は、データ行列Xk+1の信号またはそれらから導かれた信号、例えば共分散行列
【数64】
の信号などを意味する。
【0085】
共分散行列
【数65】
は、データ行列Xk+1の統計量の2次尺度である。その初期化は図3の22であり、初期化によってその行列が含むベクトルの直交性が高まる。初期化によって、式(16)の左辺の行列
【数66】
も対角に近づく。すなわち、その行列の非対角要素が小さくなる。共分散行列
【数67】
を初期化する代わりに、別法として
【数68】
を使用して、データ行列Xk+1それ自体の情報または信号またはベクトルの直交性を初期化し、その結果から初期化された共分散行列を形成することもできる。
【0086】
前述のように、対角化された共分散行列は、その行列によって表される共分散を有するベクトルに直交性を与えるための条件である。
【0087】
22での初期化の後に、以下で述べるように(k+1)番目のデータウィンドウからの情報を使用してもたらされた直交性がさらに高められる。
【0088】
次に、ゆっくりと変化するシステムでは、
【数69】
および
【数70】
が成り立ち、したがって式(16)は、次式のように書き直すことができる。
【数71】
【0089】
(m×m)の対称行列の場合、データの初期化がなければ、ヤコビ対角化法は、その行列
【数72】
の行として表されたすべての関連する信号の単一の更新からなる各スイープごとにm3オーダの操作の繰り返しを必要とする。多数のスイープが必要となることもある。しかし、本発明に従って、22で初期化され式(16)および(17)によって与えられた行列
【数73】
は、すでにほぼ対角行列に近づいている。したがって、ヤコビ対角化法は、ほんのわずかな繰り返しを必要とするだけで収束する。したがって、本発明に従って、変換を用いて(k+1)番目のウィンドウ、すなわち現在のウィンドウの信号の直交性を初期化することによって、計算コストが削減されることになる。
【0090】
次のステップは、23で、この例の場合はヤコビ法を使用して(k+1)番目のウィンドウの対角化を完成させることである。この方法は、直交性に関して初期化済みの行列
【数74】
にヤコビ法を適用したときに推定された固有ベクトルである行列
【数75】
および
【数76】
を使用する。
【0091】
【数77】
および
【数78】
は、初期化された行列
【数79】
を対角化するための小さな回転を実施する回転行列である。すなわち、これらの回転行列は、この行列内の各ベクトルを次式のように更新することによって直交化させることになる。すなわち、
【数80】
【0092】
式(18)において、
【数81】
は、式(16)において直交性が初期化された共分散行列のヤコビ対角化法を用いて計算される。この行列を対角化するためにはユニタリ行列が必要である。前と同様に、
【数82】
が対角になるような行列Qによって実施される回転の形の変換が求められる。ただし、
【数83】
である。この方法は、
【数84】
がデータを初期化し、
【数85】
が小さな更新に基づくものであるという事実を使用する。これらの行列は、どちらもがユニタリであり、それらの積もユニタリになるので、それらの積の形で使用することができる。(k+1)番目のウィンドウの固有ベクトルの推定値
【数86】
は、次式で表される。
【数87】
また、推定信号
【数88】
は式(24)で定義される。これらはすべてステージ22および23で行われる。
【0093】
高次ステージ25/27に関して、式(24)から得られた信号は、Rkを用いて式(26)で初期化される。これは、図3に示されたステージ25で行われる。この処理は、式(24)から得られた信号中の4次情報を初期化する。これらの信号をより完全に独立にする、または分離させるために、それらは式(29)を使用して更新される。これはステージ27で行われる。
【0094】
式(5)で、kをk+1に書き換えると次式となる。
【数89】
【0095】
式(20)に前から
【数90】
を掛けると次式が得られる。
【数91】
【0096】
式(21)に前から
【数92】
を掛けると次式となる。
【数93】
上式で、
【数94】
は、行列
【数95】
中に含まれる固有値の平方根である各要素を含む対角行列である。すなわち、
【数96】
(方法20の高次統計ステージ25/27で使用される)行列
【数97】
に含まれる直交正規信号ベクトルは、式(23)を使用して式(22)から
【数98】
を消去することによって表すことができる。すなわち、
【数99】
【0097】
ベクトルまたは信号
【数100】
は、図3の2次ステージ22/23から出力された無相関化された信号である。前述のように、これらは、図2(c)および2(d)に関連して説明した未知の回転行列によって非混合化された信号(独立のソース信号に対応する)に関連づけられている。高次統計ステージ25/27はこの回転行列を推定するために使用される。繰り返し計算を削減するために、以前のウィンドウからの情報を使用して現在のウィンドウの分離処理を初期化する。
【0098】
(k+1)番目のウィンドウに関して、各々が非ゼロ固有値とゼロ平均を有するm個の直交正規信号ベクトルが、ヤコビ無相関化ステージ23から
【数101】
として求められる。次に、これらは、(m×m)のユニタリ回転行列
【数102】
と、ソース信号15の非混合バージョンである信号推定値
【数103】
の積として表される。
【0099】
【数104】
【0100】
推定値
【数105】
は、起こり得る信号スワッピングやスケールファクタを反映するために任意の並べ替えによって各ソース信号15に関連づけられる。式(25)の両辺に乗算するために、
【数106】
の転置かつ逆行列である回転行列Rk+1を推定する必要がある。すなわち、これにより式(25)の右辺から
【数107】
が消去され、その結果必要な推定値
【数108】
が復元される。混合行列がゆっくり変化する場合は、直前のまたはk番目のウィンドウからの情報を使用して次式が得られる。
【数109】
【0101】
式(26)は、ステップ23から出力された無相関化された信号が、k番目のデータウィンドウから得られたRkを掛けることによって、25でその独立性が初期化されることを表す。これにより、無相関化された信号中の4次情報が初期化される。信号の独立性を高め信号を分離するために、それらの信号は、ステップ27で(k+1)番目のデータウィンドウに基づいて以下のように更新される。すなわち、ゆるやかな変化に対しては
【数110】
となるので、次式が成り立つ。
【数111】
【0102】
BLISSなどのブロックベースアルゴリズムの高次統計ステージ25/27は、本発明に従って、式(27)からの信号の初期化された行列
【数112】
を使用して実施される。このステージは、行列
【数113】
のすべての信号ペアに対する単一の更新である各スイープあたり、ほぼ以下の回数だけ操作が繰り返される。
スイープあたりの操作回数≒20m(m−1)n/2 (28)
上式で、項m(m−1)/2はペアごとの操作の回数を示し、nは(k+1)番目のウィンドウにおける信号サンプルの数、または関連するデータ行列Xk+1の要素の数を表す。式(27)で規定された信号はほぼ分離されているので、信号の分離への収束のためには、高次統計ステージ25/27におけるわずかな回数のスイープの繰り返しだけが必要になる。BLISS推定処理から得られた角度が小さくなったときに、分離が生じたものと判断される。本発明による初期化は、信号を非混合化するために必要な計算ステップの数を削減する。信号の独立性はステップ25での更新によって高められる。また、元の信号ソースの非混合化または分離された推定値
【数114】
は、次式で与えられる。
【数115】
上式で、Rzは小さな回転または更新を実施するユニタリ回転行列である。Rzは、高次ステージ25/27において、初期化されたベクトル
【数116】
を用いて計算される。Rkと同様に、Rzはペアごとの回転の繰り返しシーケンスを用いて計算される。各ペアごとの回転は、
【数117】
から取り出されたそれぞれの信号ペアの統計的独立性を最大にするように設計される。また、独立性は対応するペアごとのコスト関数によって評価される。(k+1)番目のウィンドウのユニタリ回転行列Rk+1は、前述のように、無相関化によって得られた信号ベクトルを回転させる必要がある。このことは、Rkがデータを初期化し、RzがRkに対する小さな更新であるという事実を使用している。これらの行列はどちらもユニタリでありその積もユニタリになるので、これらを積として表すことができる。したがって、回転行列Rk+1は初期化行列と更新行列の積として表すことができる。すなわち、
Rk+1=RzRk (30)
【0103】
式(19)〜(30)に関連して説明した初期化および更新の処理は、信号の分離に関する計算負荷を削減することができる。さらに、それらの処理を使用して信号スワップと呼ばれる良く知られた問題を回避することもできる。このことについては後で説明する。
【0104】
要約すると、式(16)はデータ行列Xk+1内の情報(ベクトルまたは信号)の直交性に関する
【数118】
による初期化を表す。これは図3のステップ22に対応する。信号をより完全に直交させるために、それらは式(18)を用いてステップ23で更新される。更新された固有ベクトル
【数119】
は式(19)を用いて推定され、推定された信号
【数120】
は式(24)で定められる。高次ステージ25/27に関しては、25で、式(24)を用いて得られた信号が、Rkによって式(26)を用いて初期化される。ステップ25は、処理した信号中の4次情報を初期化する。これらの信号をより完全に独立化、または分離するために、ステップ27で、式(29)を用いてそれらの信号を更新して、現在の(k+1)番目のウィンドウをより完全に反映する。
【0105】
次に、信号スワップの問題に注目すると、この問題は胎児ECG解析に関して図4に示されている。4秒/2,000サンプルの長さで、8サンプル幅のデータウィンドウが使用される。すなわち、それぞれがウィンドウあたり2,000サンプルからなる8つの信号が存在する。50%のウィンドウオーバラップが使用される。すなわち、各ウィンドウの後半分が、直後のウィンドウの前半分になる。各ウィンドウは個別に処理され、センサ14は、グランドおよび基準電極に加えて8個の信号電極からなる。この図は、時間対振幅の8本の信号トレース1〜8(左側に表示)を示す。すなわち、これらのトレースは、各々が個別の分離された信号を表すことが意図されたものであるが、そうではなく、各々が複数の信号からの寄与を含んでいる。例えば、トレース3は、胎児ECGに対応するピーク周期性を有する第1の領域30、母体ECGに対応するピーク周期性を有する第2の領域32、および雑音からなる第3の領域34を含む。
【0106】
信号スワップの現象は、2次ステージ22/23(式(17)〜(22))および/または高次ステージ25/27で生じる可能性がある。この現象は、前述の初期化処理における、小さな回転更新を適用するだけで是正される。ここで、(前述のように)「小さな」は、複数の可能な回転が存在し、より小さい/最も小さいものが選択されることを意味する。以下の議論のために、xおよびyはベクトルであり、その各々は、データウィンドウの全長に広がる、それぞれのセンサからの信号のすべてのサンプルを表す
【数121】
のそれぞれの行である。xとyが2次ステージ22/23で初期化された後で、それらは互いにほぼ直交している。このことは図5に示されている。この図では、初期化されたベクトルxおよびy(実線矢印)は、破線40によって示された直交座標軸によって示されると同様に、ほぼ90度離れている。
【0107】
ベクトルxおよびyをより正確に直交させるために、それらの間に相対回転角θが導入される。この回転は、前述の対称行列に関するヤコビ対角化などの無相関化法によって実施される。すでにほぼ直交している信号について、この方法によって2つの解、すなわちθ≒0度およびθ≒90度が得られる。信号スワップを避けるためには、より小さな値であるθ≒0を選択すべきである。各信号が実際に、互いにより小さな値のθだけ相対的に回転させられる場合、これは次式によって与えられるGivensの回転行列に相当する。すなわち、
【数122】
【0108】
θ≒0のときは、1対の初期化された(ほぼ直交した)ベクトルxおよびyは次式を用いて更新することができる。
【数123】
【0109】
この場合、更新された信号は同一の順序であり、信号スワップが避けられる。これは、θ≒90度の場合と対照的であり、θ≒90度の場合には、あるベクトルを他のベクトルに対して回転させるGivens回転行列は次式となる。
【数124】
【0110】
式(33)を用いて、1対の初期化されたベクトルxおよびyを更新すると次式が得られる。
【数125】
【0111】
この場合、更新された信号は、xTと−yTの位置の入れ替わりによって示されるようにスワップされ、−yTの負号によって示されるように符号反転も生じる。
【0112】
したがって、ヤコビ無相関化法においては、解への収束を達成するために2つの角度の小さい方が選択される。したがって、2次ステージの初期化処理および小さい方の角度によるヤコビ更新を用いると、本発明により信号スワップが回避される。有効であるために、このアプローチは、考慮中のシステムがゆっくり変化すること、および結果としてθの値が小さくなることを利用している。
【0113】
信号スワップは高次統計量ステージでも起こり得る。なぜならば、やはり複数の選択できる解または回転角度が存在するからである。式(27)を使用してデータにRkを適用した後で、推定された信号ベクトルは、小さな回転によって対応するソース信号に関連づけられる。BLISSまたは高次統計量ステージでは、4次統計量が使用されるので、ここでは信号分離を達成するために選択可能な4つの角度が存在する。このことは図6に示されている。この図は、デカルト座標軸52に対して小さい角度で回転された2つのほぼ分離された信号の散布図50を示す。これらの信号が適切に分離されている場合は、散布図50の底辺および左辺である54および56は、それぞれの軸52に揃うはずである。このように信号がほぼ分離されているときは、散布図50を4つの角度(θ≒0,90,180,または270度)のうちの任意の1つで回転させて、軸52に揃えることができる。ここでもまた、本発明によれば、4つの角度のうちの最も小さい角度を選択することで信号スワップが避けられることが明らかになった。
【0114】
前述のように、BLISSは4次統計量に基づいている。BLISSの代わりに3次統計量に基づく技術を使用することも可能である。このことは、「An Improved Cumulant Based Method for Independent Component Analysis」、T.BlaschkeおよびL.Wiskott、Proc.Int.Conf.On Artificial Neural Networks、ICANN’02、2002に記載されている。3次および4次統計量の組合せを使用することも可能である。
【0115】
上述のように、本発明は、図4に示され解析されたデータを用いる胎児ECG解析に使用された。ただし、このデータは信号スワップを含んでいる。データウィンドウは、4秒/2,000サンプルの長さ、8サンプル幅、ウィンドウオーバラップ50%で使用された。すなわち、各ウィンドウの後半分は直後のウィンドウの前半分となっていた。センサ14は、グランドおよび基準電極に加えて8つの信号電極から構成され、8つの信号を生成した。各ウィンドウは、式(17)〜(30)によって示されるように処理された。結果は図7に示されている。この図は、時間対信号振幅の8本のトレース61〜68(左側に表示)を示す。これらの信号は、明らかに良く分離された信号を表しているように見える。なぜならば、各トレースに対して信号特性が変化しないからである。例えば、トレース61および65はどちらも、胎児ECGに対応する約140ビート/分を示す。トレース62、67、および68は、母体ECGに対応する約87ビート/分を示す。雑音を含む低周波信号は、トレース64上で良く分離されているように見える。また、雑音は63および66で分離されている。このことは、信号スワップを防止する本発明の機能を示している。例えば、複数の母体ECG信号が存在している理由は、心臓が点信号源ではなく、同一の広がった信号源からの複数のECG信号が存在する可能性があるからである。
【0116】
初期化および更新処理はまた、所望の信号だけに対象を絞り込むこともできる。この技術は、不要な信号を追跡することによって生じる不必要な計算を避けることができる。この技術は、関心のある信号(例えば、母体ECGや胎児ECG)を取得ステージで分類することができるという事実を利用する。胎児ECG解析では、この分類処理は、ユーザ(臨床医もしくは医者)の選択またはパターン分類技術によって実施することができる。ECG信号のパターン認識方法については、J.PanおよびW.J.Tompkins、「A Real−Time QRS Detection Algorithm」、IEEE Transactions on Biomedical Engineering 32(3):230〜236、1985に記載されている。
【0117】
所望の信号が識別された後で、この情報を使用してそれらの処理に集中または対象を絞り込むことができる。取得ステージ16で関心のある信号を分類した後で、そのような対象の絞込みのない場合の本発明と比べると、対象を絞り込む技術は、信号分離ステージ17での更新を所望の信号に制限することだけが異なる。
【0118】
図8は、所望の信号を絞り込んだ場合の信号分離80の構成図である。71で、直前の(k番目の)データウィンドウからの行列
【数126】
からなる初期化情報が入力され、72で
【数127】
が(k+1)番目のウィンドウ中のデータに適用されてその直交性が初期化される。次いで、後で詳述するように、73で所望の信号に対象が絞り込まれ、74で(他の信号を除く)それら所望の信号だけがヤコビ法を用いて小さい更新角度で無相関化される。ステップ72〜74は一体で、統計用語で言う2次ステージの処理となり直交正規信号を生成する。次に、75でk番目のウィンドウの回転行列Rkが入力され、76で直交正規信号に適用されてその独立性が初期化される。次に、77で再び所望の信号に対象が絞り込まれる。所望の信号は、78でICAによって高次統計量を用いた小さな角度の更新で分離される。ステップ76〜78は一体で、統計用語で言う高次ステージの処理となり、出力79で分離された信号を生成する。
【0119】
図8の73および77での所望の信号の絞込みは、2次および高次ステージの両方に示されている。これは必須ではなく、両方の代わりに一方または他方を使用することができる。77で高次ステージにおける所望の信号を絞り込むことによって、ほとんどの利点が得られる。この高次の対象を絞り込むアプローチは、2次情報を初期化し、式(16)を用いてヤコビ法で更新し、次いで式(27)を用いて高次データを初期化する処理を再度使用する。
【0120】
対象を絞り込む方法についてより詳細に説明する前に、高次ステージ76〜78がペアごとの回転の繰り返しシーケンスを使用して実施できることを再度強調しておく。これらの各回転は、信号のペアを形成する2つの信号の統計的独立性を最大にするように設計される。また、統計的独立性は関連するペアごとのコスト関数によって評価される。m本の信号v1〜vmの場合は、mC2またはm(m−1)/2の信号ペアが存在する。76でこれらの信号を初期化して、ゼロ平均の直交正規ベクトル
【数128】
から
【数129】
を形成した後で、ベクトルペアの総数は次のように表される。
【数130】
(35)の直交正規ベクトル
【数131】
から
【数132】
は、前述のように、直前のデータウィンドウを用いて得られた高次情報を使用して初期化されるものと想定されている。対象の絞込みが無ければ、繰り返しシーケンスにおいてこれらのペアのすべてを更新しなければならず、このことは、m(m−1)/2のペアを更新する必要があることを意味する。これに対して、対象を絞り込むアプローチでは、所望のベクトルを含むペアを更新することだけが必要である。これは以下のように可能である。
− 初期化および小さな更新処理により、各ベクトルは分離処理において、その順序を維持すること(各データウィンドウに対して、三角形の中のそれらの位置を変化させないこと)が可能になる。また、
− 信号取得ステージにおいて所望の信号(この例では、母体および胎児ECG)を識別することによって、更新処理におけるこれらの信号をベクトル
【数133】
および
【数134】
で表すことができる。次に、
【数135】
および
【数136】
だけを、個別および一体で含むペアに対象を絞り込むことができる。
【0121】
【数137】
および
【数138】
を含むペアが対象であり、他に無ければ、(35)の最初の2行だけを更新する必要がある。この更新は、全更新のm(m−1)/2ペアに対して(m−1)+(m−2)信号ペアだけを含む。この「対象を絞り込む」処理においては、母体および胎児信号だけが分離される。この例では必要がないので、他の信号の分離は実施されない。
【0122】
上述のように、この対象絞込みの方針は2次ステージ72〜74にも適用することができる。取得ステージの後で、式(11)などによって2次情報を初期化して初期化された共分散行列を生成することによって、この行列の所望の信号に対応する行は更新されるが、他の行は更新されないことになる。
【0123】
次に、図9を参照すると、双生児を妊娠している母親から得られたECGデータが示されている。これらのデータは、W550に記載されたような、グランドおよび基準電極に加えてそれぞれの信号チャネルに対する16個の外部腹部信号電極を使用して得られたものである。ただし、信号分離は使用されていない。データは30秒間にわたって取得されている。16本の信号トレース91〜106(左側に表示)が存在し、そのほとんど(92、93、95〜106)で強い母体ECG信号が、例えば107などの約0.8秒間隔(約72ビート/分)のスパイクとして観測することができる。双生児からの胎児ECG信号は、雑音により識別されない。
【0124】
図10は、本発明の技術を用いて図9に示された信号を分離することによって得られた結果を示す。ただし、上述の対象の絞込みによる所望の信号の選択は実施されていない。これらの信号を処理するために、6秒/3000サンプルの長さ、16信号チャネルなので16サンプル幅のデータウィンドウが使用された。各ウィンドウはそれぞれ、直前のウィンドウと60%(3.6秒)オーバラップした。図は信号トレース111〜126(左側に表示)を示し、トレース112と125が母体ECGである。トレース115と118は双生児の一方の胎児ECG信号であり、トレース121と123は双生児の他方のECG信号である。トレースは、信号が良く分離され連続であること、すなわち信号スワップが防止されていることを示している。
【0125】
本発明を適用して図10に示された結果を生成することは、16本の信号を追跡することによる計算負荷を伴う。取得ステージにおける特異値の使用などの信号検出手順を使用することもできた。特異値は、データ中の信号についてのパワーの指示を提供する。しかし、胎児ECG信号は弱いことが多いので、この検出方法は正確ではない。それにもかかわらず、取得ステージで信号を分離する際に、(パターンマッチングを使用して)それらを識別することができる。したがって、本発明の方法は所望の信号に集中するように対象を絞り込むことができる。パターン認識技術を使用して、繰り返し波形を検出することができる。例えば、心拍信号には、心臓学でQRS部と呼ばれている独特の形状の主要部分が含まれる。母体ECGのQRSは胎児信号のQRS部よりはるかに強く、より少ない繰り返しを示すはずである。
【0126】
図11は、図10に関して使用したのと同一のデータを使用して、それぞれの双生児からの胎児ECG信号に、(高次ステージにおいてのみ)対象を絞り込む形の本発明の方法を適用した結果を示す。双生児のそれぞれからの信号である2つの信号140および142が示され、それらはやはり連続である。すなわち、信号スワップは生じていない。対象を絞り込む方法は、対象を絞らない方法と同一の取得ステージ16を使用する。図10の信号115と121は、検査によって異なる双生児の胎児ECG信号と識別され、これらの信号は、対象を絞り込む形の本発明の方法を使用して追跡され、図11に示された結果を提供する。対象を絞り込むアプローチでは、取得ステージにおける最初のブロックのデータを使用して、すべての使用可能な信号が処理され、分離される。したがって、それらの中から所望の信号を選択することができる。所望の信号は
− ユーザによる検査、または
− 科学文献において広く使用可能な、多くのパターン認識技術のうちの1つ
のどちらによっても識別することができる。
【0127】
取得ステージの後で、所望の信号だけが処理されて完全に分離される。(35)の信号の3角形で示されるように、分離された信号の順序が取得ステージで決められた後で、各信号は、所望の信号が3角形の上部の行を占めるように並べ替えることができる。すなわち、この例では図10の信号115および121が第1および第2の信号になる。次いで、初期化および更新処理でこの順序が維持される。すなわち、更新処理においてこれらの信号の位置が知られているので、これらの信号に対象を絞り込むことができる。
【0128】
第2の実施例では、本発明の対象を絞り込む方法は、単生児の胎児ECG記録、すなわち一人の胎児のECGに適用することができる。この記録は、12の信号電極および関連するグランドと基準電極を使用し3分間継続される。図12には、それぞれの電極に対応する12の信号(a)〜(l)の30秒間の記録が示されている。このデータセットの記録を処理するために、長さが6秒でウィンドウオーバラップがゼロ(すなわち、連続的なウィンドウ)のデータウィンドウが使用される。結果は、記録の第1の(0〜1)分間、第2の(1〜2)分間、および第3の(2〜3)分間における、時間に対する3つのプロットとしてそれぞれ図13に示されている。また、同一の信号は同一の参照名で示されている。各プロットは、それぞれ胎児および母体の信号に対応する、信号150および152を示す。これらの信号は連続である。すなわち、スワップしていない。
【0129】
信号スワップに対処する他の方法は、オーバラップウィンドウを使用することであり、結果として生じたオーバラップする推定信号の相互相関を使用することである。例えば、ウィンドウkおよびk+1の推定信号のオーバラップ部分が、fサンプル長さであるとし、それぞれ(m×f)の行列
【数139】
および
【数140】
で表されるものとする。これらの行列の各行は推定信号を含み、オーバラップ部分は類似の信号を含む。行列
【数141】
は
【数142】
に次式によって関連づけられる
【数143】
上式で、Dは(m×m)の行列であり、その対角要素は1または−1(信号の反転を提供する場合)である。また、Pは(m×m)の置換行列(信号のスワップを提供するもの)である。このような状況は隣接ウィンドウ間で生じる。なぜならば、推定信号が異なる順序で並べられる可能性があり、また反転が生じる可能性があるからである。推定信号のオーバラップ部分は、この相関行列がほぼ対角行列になるまで並べ替えられる。その場合には、信号は同じ順序になっているはずである。この技術については、G.Spence、「A Joint Estimation Approach for Periodic Signal Analysis」、PhD thesis、Queen’s University Belfast、June 2003に記載されている。図14a〜bはこの技術を例示するものである。図14aでは、あるウィンドウからの8つの信号が直後のウィンドウからの8つの信号と相関している。ピーク160は、一方のウィンドウの信号番号8が他方のウィンドウの信号番号2に対応していることを示す。類似の所見が162など他のピークにも適用される。信号スワップは、2つのウィンドウからの相関する信号に同じ信号番号が対応づけられるように信号を再指定することによって修正される。それによって、図14bに示された状況が生じる。図14bは、信号の再指定を除けば図14aと同一である。この図で、相関する信号を示す164などのピークは対角だけに現れる。
【0130】
次に図15を参照すると、胎児ECGの監視を実施するために適した一般的な電極装置が170によって示されている。この装置は、母親の皮膚表面に配置し、そこから発生した電圧信号を監視するのに適した、いくつかの腹部電極171a、171b、171c、G、およびRを含む。ここで、Gはグランド電極、Rは基準電極、171a〜171bは信号電極を示す。便宜上、171aなど5つの電極だけが示されているが、分離すべき信号の数に対応して必要な数だけ使用することができる。電極171a等は、それぞれの保護リード172a〜172eを介してリードボックス173に接続される。このリードボックスはやはりコンピュータ174に接続される。
【0131】
リードボックス173は、信号電極171a等からの信号を処理する回路を含み、173aの差込図に示されている。回路は2つの信号電極171aおよび171b用に示されており、破線Dは他の信号電極用の類似の回路を示す。回路は、171a等の各信号電極ごとに、それぞれの低雑音差動増幅器175、ならびにどちらもがフィルタユニット176に組み込まれたアナログハイパスフィルタおよびアナログローパスアンチエイリアシング(anti−aliasing)フィルタを含む。フィルタ176は、共通の多チャネルアナログ−デジタル変換器(ADC)177に接続される。増幅器175は、基準電極Rからの信号をそれぞれの信号電極171a等からの信号から減算し、結果として得られた差動信号を増幅する。差動信号はADC177によってデジタル信号に変換され、次いで、前述のように、信号を分離するためにコンピュータ174を用いて記録され処理される。
【0132】
次に、図16および17を参照すると、これらの図は、やはり生理学的な監視のためのものであるが、本発明の他の応用例のための信号およびそれぞれに分離された信号の記録を示すものである。この応用例は、心拍数や呼吸数を検出するための受動的な睡眠記録である。これは、ある人が(呼吸が不能になり心拍数が増大する)睡眠時無呼吸を患っているかどうかを判定する助けとなる。
【0133】
図16の12本の信号201〜212(左側に表示)は、患者が寝ているマットレスの下に置かれた12個のセンサを使用して250Hzでサンプルされる。信号は、ベッド/マットレスを介してセンサによって受信された振動を示す。各々が4000信号サンプル長(16秒)の50個のデータウィンドウが、ウィンドウオーバラップ85%を用いて処理された。使用可能なすべての信号が処理された。すなわち、信号は対象が絞り込まれなかった。ウィンドウオーバラップが大きい理由は、本発明が、連続するウィンドウ間で状況がゆるやかに変化するという想定に基づいているからである。したがって、この想定を満たし、初期化処理をより正確なものにするためには、2つの連続するウィンドウの開始点間の時間差は十分に短くしなければならない。この場合、この基準を満たすためには、データウィンドウのわずか15%(2.4秒)の時間差になる。状況が許せば、非オーバラップの連続ウィンドウを使用するのが好ましい。なぜならば、必要なデータウィンドウの数がより少なくなり、処理時間が最小になるからである。
【0134】
図17には、12本の分離された信号221〜232(左側に表示)が示されている。これらの信号のうち221、224、および225は、約0.83秒の周期性を持つ推定された心臓信号である。信号226および228は、約4.4秒の周期性を持つ呼吸に対応する推定された信号である。
【0135】
初期化および更新処理なしで、上述の並べ替え技術を使用して信号スワップの問題を修正するための信号分離を実施することを想定することは、原理的には可能である。しかし、これには欠点がある。このことは、計算上有効な対象絞込みアプローチを使用する本発明の機能が使用できないことになる。さらに、相互相関技術において信頼できる推定を提供するためには、大きなウィンドウオーバラップを使用しなければならないことになるはずである。このことは、データを処理するために、より多くのウィンドウが必要になることを意味する。例えば、50%ウィンドウオーバラップでは、1度の処理(すなわち、オーバラップなし)に対してデータは2度処理される(2倍の長さを取る)ことになる。このことは、センサ14による混合された信号の検出と、非混合信号の生成との間の時間が長くなるので不利になる。胎児ECGの場合は、特にこのことが重要になる。なぜならば、心拍異常が検出された場合には臨床医の迅速な介入が必要になることがあり、処理時間が長くなりすぎると、遅すぎて胎児を救うことができなくなる可能性があるからである。
【0136】
本発明の前述の例は、複素値データにも適用することができる。2次および高次ステージを初期化し、小さな更新を使用する原理は不変であるが、2次ステージ(ヤコビ法)および高次(ICA)ステージの複素値バージョンが必要になる。複素値データに対するICAの使用については十分に研究されており、この問題に対する多くの無相関化およびICA技術が開発されてきた。複素値ヤコビ法に関する詳細については、S.Haykin、「Adaptive filter theory,second edition」、Prentice Hall、ISBN 0−13−013236−5、1991を参照されたい。
【0137】
さらに、複素値ICA法についてのより詳細な情報は、以下に記載されている。
P.Comon、「Independent component analysis,A new concept」、Signal Processing 36、pp.287〜314、1994
I.J.Clarke、「Exploiting non−Gaussianity for signal separation」、MILCOM 2000.21st Century Military Communications Conference Proceedings、Volume:2、22〜25 Oct.2000。
【0138】
上記3つの参考文献のうちの最後の文献で、Clarkeは、BLISSの拡張バージョンが、複素信号の同相および直交成分を個別の実信号として取り扱うことによって複素信号に対処できることを示している。ヤコビ法およびBLISSのこの拡張されたバージョンを使用することにより、初期化された信号の小さな更新がやはり可能になる。これは、ヤコビ技術においてより小さな角度が選択されるからであり、高次ステージにおける初期化された信号の回転がやはり4次統計量を使用するからである。
【0139】
(k+1)番目のウィンドウにおける本発明の複素値バージョンの各式は、以下の4つのステージに要約することができる。上付きインデックスのHは行列またはベクトルがエルミートであることを表す。これらの各式は、実数の場合を表すためにも使用できる。
【0140】
1.2次ステージにおける初期化
【数144】
2.複素値ヤコビ法を用いた更新
【数145】
3.高次ステージにおける初期化
【数146】
4.複素値ICAを用いた更新
【数147】
【0141】
式(39)および(40)はそれぞれ、更新された固有ベクトルおよび直交正規信号を表す。式(42)および(43)はそれぞれ、更新された独立信号および高次回転行列を表す。第4ステージの処理は、図3に関連して前述したように要約される。本発明の対象絞込み態様もまた複素値の場合に適用可能であり、この態様もやはり所望の信号を含む信号ペアだけを更新する。
【0142】
前述の説明で与えられた、中間量および結果を計算するための各式は、搬送媒体に収録され従来のコンピュータシステム上で動作する適切なコンピュータプログラムによって明確に評価することができる。このようなプログラムおよびシステムは、熟練したプログラマならば発明を必要とせずに容易に実装することができる。したがって、これ以上は説明しない。
【0143】
次に、本発明の他の実施形態について説明する。センサからのデータを実時間で処理するとき、1回でデータ行列を更新するために1つまたは少数のデータスナップショットだけが使用可能なことがある。ここで「スナップショット」は、1組の同時データサンプル、すなわち各センサからの信号のそれぞれの単一のサンプル、すなわちデータ行列の行として定義される。このような場合、前述の移動データウィンドウアプローチは大量のウィンドウオーバラップを必要とする。すなわち、連続する処理ステージ間でウィンドウの位置は限られた量だけしか移動できないことになる。したがって、データをカバーするために多数のウィンドウが必要になることがある。このことにより、(所望の解に初期化されているとしても)、各ウィンドウごとにかなりの程度の、そして恐らくは大量の冗長データがウィンドウの統計量として再計算されることになる。本発明のスライディングウィンドウバージョン(前述の例)を対象とした、これに対処するための1つのアプローチは、全体の統計量から最も古いスナップショットの統計量を減算することである。次に、最新に追加されたスナップショットの統計量が計算され、全体の統計量と最も古いスナップショットの統計量の差に加算される。やはり、BLISSアルゴリズムを実施するための2つの方法が存在する。一方のバージョンは、センサ信号またはデジタル化された等価量に直接作用し、他方は、それらの信号から得られた4階のテンソルに直接作用する。これらのバージョンからの結果のセットは等価になるはずであり、先の実施形態の移動ウィンドウアプローチのために使用することができる。
【0144】
冗長性の問題は繰り返し更新アプローチを使用することによっても回避することができる。このアプローチでは、信号分離は以前に計算された(再計算されない)古いデータの統計量と最新に追加されたデータから得られた新たに計算された統計量に関する重みづけられた尺度を用いて実施することができる。このアプローチは前述の移動ウィンドウアプローチと概念的に異なるものではない。このアプローチもやはり、初期化と小さな更新処理を使用し、やはり2次および高次統計ステージに適用される。しかし、矩形のウィンドウを用いた移動ウィンドウアプローチを使用する代わりに、指数関数的に減衰するウィンドウが使用される。これにより、本発明が、ウィンドウのオーバラップ領域を再計算する問題を回避しながら、最新の使用可能なデータスナップショットを繰り返し処理することが可能になる。その結果として、オーバラップウィンドウ部の統計量が再計算されないので、冗長性が最小になる。
【0145】
この実施形態では、繰り返し更新アプローチは2つの部分に分けられる。第1の部分は、先の実施形態と同様にデータの矩形のウィンドウを使用するものであり、取得ステージと呼ばれる。取得ステージでは、信号は前述のように分離される。取得ステージでは、データの1次、2次、および高次統計量が計算され、第2ステージで使用される。第2ステージでは、これらの統計量が繰り返し更新される(表2〜4参照)。n個のサンプルを用いる取得ステージにおいては、データは(m×n)のデータ行列X0=[x1 x2...xm]Tとして定義される。ただし、行x1〜xmはそれぞれ、それぞれのセンサの出力信号を表す。したがってX0は、各々がn個の要素を含むm個のベクトルx1〜xmによって表される。表1のX0および他のパラメータの下付き指標0は、取得ステージのt=0を表す。テンソルを形成する4次モーメントは以下の表1に示されている。これらのモーメントは、任意の種類の4つのベクトル、例えばテンソル要素Mijklが
【数148】
で与えられるようなyi、yj、yk、およびylの間の関係の尺度を示す。上式で、yi(τ)はベクトルyiのτ番目のサンプルを表す。また、τは整数の時間指標であり、連続するサンプル間の時間間隔Tsが乗算されるとサンプル時間を表す。
【表1】
【0146】
M0の各要素Mijklは次式で定義される。
【数149】
上式で、vi(τ)はi番目の信号ベクトルviの時間τでのサンプルであり、τはサンプリング時間間隔の単位であり、nは、先に示したように、各ベクトルあたりのサンプル数である。
【0147】
表1の定義を用いると、この例の2次ステージまたは繰り返し更新ステージは、数学的に以下のように定義することができる。説明の便宜上、このステージは、重みづけによって減衰させられた以前のスナップショットの寄与を含む以前のデータウィンドウと各更新あたりの新しいデータからなる単一のスナップショットの加算とを含むデータを用いて各々が作成された、一連の更新として説明される。このことは、より古いデータほど漸次、より大きく減衰させられることを意味する。各スナップショットは指標番号tを有する。ただし、tはサンプル時間間隔の単位でt=1〜Tであり、最初のステージまたは取得ステージはt=0で示される。しかしながら、本発明のこの実施形態は、各更新あたり単一のスナップショットに限定されるものではない。
【0148】
便宜上、ここでデータスナップショット(これまではxt)をdtと定義する。また、ここで2次統計量ステージから得られたスナップショットの無相関化され正規化された等価量(これまではvt)をztと定義する。
【0149】
取得の後で、各スナップショットdtごとに、それぞれの平均ベクトルvtが下表の式(50)を用いて繰り返し更新され、下表の式(51)を用いてデータスナップショットから減算される。以下の表2〜4において、繰り返し更新ステージの処理が定められる。各更新が複数のスナップショットを含む場合は、更新におけるすべてのスナップショットに関して平均が計算される。
【表2】
【0150】
式(50)および(51)は、信号処理において「忘却係数」と呼ばれるpおよび(1−p)の使用による、指数関数的に減衰するデータのウィンドウから生成される1次統計量を提供する。pの値は0と1の間に存在する。したがって、pおよび(1−p)は古いデータの影響を漸次減少させる。この例では、pの値は0と0.1の間に存在する可能性が高い。各更新ごとに(1−p)およびpが適用されるので指数関数的な減衰が生じる。したがって、スナップショット後の更新される回数が増えるほど、その影響が減衰する。例えば、u回の更新の後で、w番目の更新スナップショットはp(1−p)u−w+1だけ減衰する。ただし、取得ステージウィンドウのスナップショットはwの値に関しては無視される。忘却係数の値pは、取得データウィンドウの長さに関連させて設定することができる。それはまた、データの信頼を反映するように、適応させてpを設定することができるという利点も提供する。例えば、データの雑音成分が減少しているか増加しているかに応じて、処理の間にpの値を上方または下方に調整することができる。
【0151】
繰り返し更新ステージにおける処理手順の次の部分では、以下の表3の式(52)〜(56)が使用される。この部分では、データ行列の共分散行列χtによって表される2次統計量は、式(52)を使用して繰り返し更新される。ここで、時間tにおける共分散行列χtは、やはり指数関数的に減衰するウィンドウを提供するために、時間(t−1)の共分散行列χt−1に(1−p)を乗じたものと、新しいデータスナップショット
【数150】
の共分散行列
【数151】
にpを乗じたものとを加算することによって生成される。最初の更新に関して、t−1=0は関連する前の結果が表1に関連して説明した取得ステージからのものであることを示す。共分散行列χtは先の実施形態で説明したように(式(16)参照)、
【数152】
を前から乗算し、Ut−1を後から乗算することによって、式(53)によって初期化された直交成分を含む。ここで続いて、rモード積を示すためにxr(r=1,2...)を使用する。rモード積とは、例えば2次の場合にXXT=UλUT=λX1UX2Uを満たすものである。ただし、U、λ、Tに関しては、以前に定義済みである。したがって、表現λX1UX2Uは、行列Uがλの最初の次元に適用され、次いでλの第2の次元に適用されることを意味する。本実施形態の目的は、2次データ共分散行列を対角化することであり、この行列が全体のデータウィンドウを処理することによって生成されたものでははなく、式(52)の繰り返し更新から生成された場合であっても、先の実施形態と同様にその行列を対角化することである。式(54)で、行列
【数153】
は小さな更新を用いて対角化される。更新の結果は、式(55)および(56)で定義される。この実施形態では、各更新は単一のスナップショットを含むので、式(56)は単一のスナップショットの2次推定値ztを生成する。各更新が複数のスナップショットに関して実施される場合は、推定もまた複数のスナップショットに対して実施される。
【表3】
【0152】
本実施形態の次の(高次統計量)部分は、以下の表4の式(57)〜(62)を使用する。2次ステージの式(56)によるスナップショットの現在の推定値が、高次ステージに送られる。このスナップショットの4次モーメントテンソルは式(57)で形成され、繰り返し更新される。このテンソルは式(59)のRt−1の適用によりほぼ対角化されており、次いで小さな更新Rzを使用して式(60)によってより完全に対角化される。この4次テンソルの対角化は、この例における信号分離の必要条件である。これらはやはり、BLISSアルゴリズムを使用して計算することができる。回転行列は式(61)を使用して決定される。また、(時間tにおける)信号の推定値は式(62)によって与えられる。ここで繰り返し更新から4次統計量が生成されることを除けば、これらは先の実施形態と同じ種類の処理である。
【表4】
【0153】
実際には、各更新あたり複数のスナップショットを使用して繰り返し更新を実施することができる。その場合、この実施形態は、各更新あたりに存在するスナップショットと同数の推定信号スナップショットを生成する。
【0154】
この実施形態では、式(50)、(52)および(58)は指数関数的に減衰するウインドウ、すなわち忘却係数を使用して処理を重みづけしたウィンドウを形成する信号から生成される統計量を表す。図1〜17に関連して説明した第1の例の移動ウィンドウアプローチに関しては、統計量は矩形のウィンドウから生成される。式(51)、(53)〜(56)、および(59)〜(62)は、第1の実施形態と同じ処理である。高次ステージにおいてだけBLISSのテンソルバージョンが使用される。これにより、4次統計量を更新することが可能になる。
【0155】
臨床医による脳波図(EEG)測定結果の解析は、例えば癲癇、脳腫瘍、脳損傷などの脳機能不全を診断するために十分に確立された技術である。しかし、実際には、この解析は非常に困難なものになり得る。その理由は、EEG測定結果が、不要な電気的干渉(アーチファクト)により重大な影響を受けやすい微弱な電気信号を発生するからである。このような干渉は、眼球の移動および/またはまばたき(眼のアーチファクト)、患者の筋肉の動き、ならびに主電源による干渉などのソースから生じる。
【0156】
BSSアプローチを使用して不要な干渉を抑制することによって、EEGデータ中の関心のある信号を分離することができる。所望のEEG信号が反復的(「擬似連続的(pseudo−continuous)」)であるときは、追跡BBS法を使用してそれらを追跡することができるので、長期間の監視が可能になる。癲癇発作を繰り返す患者から臨床EEGデータを取得することができる。これらのデータは、反復的なEEG信号、すなわち時間に対するEEG電圧を発生する。これらのデータは、従来は、8つの頭皮電極を患者に貼り付け、EEG装置を用いて電極電圧を監視することによって取得していた。EEG信号は、干渉によって雑音が混入した繰り返しの癲癇発作信号から構成されていた。信号中の癲癇発作を推測することはできたが、干渉のために確実には識別することができなかった。例えば、8つの信号のいずれかの信号の極大を数えただけでは、発作の正確な回数は得られなかった。本発明の繰り返し追跡実施形態をEEG信号に適用して推定信号を提供することができる。5秒間にわたる取得ステージが使用され、各更新は256Hz、すなわち128デ−タサンプルを生成するのに0.5秒のサンプルレートで、128のデータスナップショットからなるそれぞれのセットを使用して生成された。推定された信号には信号のスワップが存在せず、干渉よりも大きな振幅の容易に識別可能なスパイクによって示される繰り返しの癲癇発作が示されている。信号対干渉および雑音比はスパイクの高さの変化に応じて3〜6の範囲となる。
【図面の簡単な説明】
【0157】
【図1】本発明の方法を示す概略構成図である。
【図2a】信号分離の各ステージを示す信号散布図である。
【図2b】信号分離の各ステージを示す信号散布図である。
【図2c】信号分離の各ステージを示す信号散布図である。
【図2d】信号分離の各ステージを示す信号散布図である。
【図3】本発明の方法を示す構成図である。
【図4】胎児のECG解析における信号スワッピングを示す図である。
【図5】本発明で使用される更新処理を示すベクトル図である。
【図6】2つのほぼ独立な信号の散布図である。
【図7】母体および胎児のECGデータを用いて本発明の信号分離を示す図である。
【図8】特定の信号に対象を絞り込むように構成された本発明の方法を示す構成図である。
【図9】双生児の妊婦の外部腹部電極を用いて得られた、信号分離前のECGデータを示す図である。
【図10】本発明を用いて図9のデータから信号を分離して得られた結果を示す図である。
【図11】図9のデータにおける双生児の胎児のECG信号に対象を絞り込むように構成された本発明の方法を用いて得られた結果を示す図である。
【図12】信号分離前の単生児の胎児ECGデータを示す図である。
【図13】図12のデータのECG信号に対象を絞り込むように構成された本発明の方法を用いて得られた結果を示す図である。
【図14a】信号スワッピングの修正の前後で相互相関された信号の擬似3次元プロットを示す図である。
【図14b】信号スワッピングの修正の前後で相互相関された信号の擬似3次元プロットを示す図である。
【図15】胎児ECG監視を実施するのに適した電極装置を概略的に示す図である。
【図16】患者が横たわっているマットレスの下のセンサを用いて得られた、信号分離前の心拍/呼吸データを示す図である。
【図17】本発明を使用して図16のデータから信号を分離して得られた結果を示す図である。
【特許請求の範囲】
【請求項1】
データのウィンドウに関連する信号の処理を含む動的ブラインド信号分離のための方法であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを含むペアに対して、各先行するウィンドウに関連して得られた結果を用いて後続のウィンドウを処理し、それによってそれぞれの後続のウィンドウに関連する信号の直交性および独立性の個別の初期化を実施して後続のウィンドウの近似結果を求めること、および
b)近似結果を処理して信号分離を達成すること
を含むことを特徴とする方法。
【請求項2】
近似結果の処理が、小さな更新を用いて直交性を更新することで無相関化を実現することを2次統計手順に組み込むことを特徴とする請求項1に記載の方法。
【請求項3】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性の更新が行われることを特徴とする請求項2に記載の方法。
【請求項4】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化された信号の独立性を初期化する第2ステージの初期化を含み、この第2ステージが、2次統計手順よりも高次の統計手順において、独立成分分析(ICA)を用いて小さな回転更新を初期化された信号に適用することで信号の独立性および分離を実現することを特徴とする請求項3に記載の方法。
【請求項5】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項4に記載の方法。
【請求項6】
信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズで実施されることを特徴とする請求項1に記載の方法。
【請求項7】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項1に記載の方法。
【請求項8】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新することでスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを含み、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となることを特徴とする請求項1に記載の方法。
【請求項9】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数で直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施することを特徴とする請求項8に記載の方法。
【請求項10】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項8に記載の方法。
【請求項11】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、さらに4階のテンソル更新としてモーメントを求めるための信号ベクトルを提供する無相関化され正規化されたスナップショット等価量を含むとともに、スナップショット結果を直前の結果と組み合わせる前に、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1であることを特徴とする請求項8に記載の方法。
【請求項12】
データのウィンドウに関連する信号を処理するようにプログラムされた動的ブラインド信号分離のためのコンピュータ装置であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えたペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施することで後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ようにプログラムされることを特徴とするコンピュータ装置。
【請求項13】
小さな更新を用いて近似結果の直交性を更新することで2次統計手順における無相関化を実現するようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項14】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性を更新するようにプログラムされることを特徴とする請求項13に記載のコンピュータ装置。
【請求項15】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するようにプログラムされ、この第2ステージが、2次統計手順よりも高次の統計手順において、初期化されたデータに小さな回転更新を適用して信号の独立性および分離を実現するためのICAを含むことを特徴とする請求項14に記載のコンピュータ装置。
【請求項16】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項15に記載のコンピュータ装置。
【請求項17】
信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項18】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項12に記載のコンピュータ装置。
【請求項19】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返して後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となるようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項20】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するようにプログラムされることを特徴とする請求項19に記載のコンピュータ装置。
【請求項21】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項19に記載のコンピュータ装置。
【請求項22】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、コンピュータ装置が、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するようにプログラムされることを特徴とする請求項19に記載のコンピュータ装置。
【請求項23】
データのウィンドウに関連する信号を処理することを含む動的ブラインド信号分離のためのコンピュータソフトウェアであって、コンピュータ装置を制御して
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えるペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いてそれぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施することで後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ための命令を含むことを特徴とするコンピュータソフトウェア。
【請求項24】
小さな更新を用いて近似結果を処理し、それによって直交性を更新して2次統計手順における無相関化を実現するための命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項25】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性を更新する命令を含むことを特徴とする請求項24に記載のコンピュータソフトウェア。
【請求項26】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するための命令を含み、この第2ステージが、2次統計手順よりも高次の統計手順において、ICAを用いて小さな回転更新を初期化されたデータに適用することで信号の独立性および分離を実現することを特徴とする請求項24に記載のコンピュータソフトウェア。
【請求項27】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項26に記載のコンピュータソフトウェア。
【請求項28】
信号が分離されその分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するための命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項29】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項30】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返して後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項31】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するための命令を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【請求項32】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【請求項33】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、コンピュータソフトウェアが、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するための命令を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【請求項1】
データのウィンドウに関連する信号の処理を含む動的ブラインド信号分離のための方法であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを含むペアに対して、各先行するウィンドウに関連して得られた結果を用いて後続のウィンドウを処理し、それによってそれぞれの後続のウィンドウに関連する信号の直交性および独立性の個別の初期化を実施して後続のウィンドウの近似結果を求めること、および
b)近似結果を処理して信号分離を達成すること
を含むことを特徴とする方法。
【請求項2】
近似結果の処理が、小さな更新を用いて直交性を更新することで無相関化を実現することを2次統計手順に組み込むことを特徴とする請求項1に記載の方法。
【請求項3】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性の更新が行われることを特徴とする請求項2に記載の方法。
【請求項4】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化された信号の独立性を初期化する第2ステージの初期化を含み、この第2ステージが、2次統計手順よりも高次の統計手順において、独立成分分析(ICA)を用いて小さな回転更新を初期化された信号に適用することで信号の独立性および分離を実現することを特徴とする請求項3に記載の方法。
【請求項5】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項4に記載の方法。
【請求項6】
信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズで実施されることを特徴とする請求項1に記載の方法。
【請求項7】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項1に記載の方法。
【請求項8】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新することでスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返すことによって後続のウィンドウを処理する後続のステージとを含み、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となることを特徴とする請求項1に記載の方法。
【請求項9】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数で直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施することを特徴とする請求項8に記載の方法。
【請求項10】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項8に記載の方法。
【請求項11】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、さらに4階のテンソル更新としてモーメントを求めるための信号ベクトルを提供する無相関化され正規化されたスナップショット等価量を含むとともに、スナップショット結果を直前の結果と組み合わせる前に、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1であることを特徴とする請求項8に記載の方法。
【請求項12】
データのウィンドウに関連する信号を処理するようにプログラムされた動的ブラインド信号分離のためのコンピュータ装置であって、
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えたペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いて、それぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施することで後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ようにプログラムされることを特徴とするコンピュータ装置。
【請求項13】
小さな更新を用いて近似結果の直交性を更新することで2次統計手順における無相関化を実現するようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項14】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性を更新するようにプログラムされることを特徴とする請求項13に記載のコンピュータ装置。
【請求項15】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するようにプログラムされ、この第2ステージが、2次統計手順よりも高次の統計手順において、初期化されたデータに小さな回転更新を適用して信号の独立性および分離を実現するためのICAを含むことを特徴とする請求項14に記載のコンピュータ装置。
【請求項16】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項15に記載のコンピュータ装置。
【請求項17】
信号が分離され分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項18】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項12に記載のコンピュータ装置。
【請求項19】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返して後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となるようにプログラムされることを特徴とする請求項12に記載のコンピュータ装置。
【請求項20】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するようにプログラムされることを特徴とする請求項19に記載のコンピュータ装置。
【請求項21】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項19に記載のコンピュータ装置。
【請求項22】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、コンピュータ装置が、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するようにプログラムされることを特徴とする請求項19に記載のコンピュータ装置。
【請求項23】
データのウィンドウに関連する信号を処理することを含む動的ブラインド信号分離のためのコンピュータソフトウェアであって、コンピュータ装置を制御して
a)連続するウィンドウのペアであって、各ペアが先行するウィンドウと後続のウィンドウを備えるペアを処理し、
b)各先行するウィンドウに関連して得られた結果を用いてそれぞれの後続のウィンドウに関連する信号の直交性と独立性に関する個別の初期化を実施することで後続のウィンドウの近似結果を求め、さらに
c)近似結果を処理して信号分離を達成する
ための命令を含むことを特徴とするコンピュータソフトウェア。
【請求項24】
小さな更新を用いて近似結果を処理し、それによって直交性を更新して2次統計手順における無相関化を実現するための命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項25】
ヤコビ法と呼ばれ、行列の非対角要素が実質的にゼロに等しくなるまで繰り返し回転を決定し適用することで対称行列を対角化することを含む技術によって直交性を更新する命令を含むことを特徴とする請求項24に記載のコンピュータソフトウェア。
【請求項26】
各先行するウィンドウごとに得られた結果を用いてそれぞれの後続のウィンドウに関連する無相関化されたデータの独立性を初期化する第2ステージの初期化を実施するための命令を含み、この第2ステージが、2次統計手順よりも高次の統計手順において、ICAを用いて小さな回転更新を初期化されたデータに適用することで信号の独立性および分離を実現することを特徴とする請求項24に記載のコンピュータソフトウェア。
【請求項27】
2次統計手順よりも高次の統計手順が3次および4次統計手順の少なくとも一方であることを特徴とする請求項26に記載のコンピュータソフトウェア。
【請求項28】
信号が分離されその分離された信号の中から所望の信号が識別される取得フェーズ、および所望の信号だけが処理されて分離される後続のフェーズを実施するための命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項29】
ウィンドウに関連する信号がウィンドウ内のデータの統計的尺度であることを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項30】
データの第1の先行ウィンドウを処理して第1の結果を得る取得ステージと、後続のデータスナップショットを用いて直前の結果を更新してスナップショット結果を生成することと、そのスナップショット結果を直前の結果と組み合わせることとを繰り返して後続のウィンドウを処理する後続のステージとを実施し、直前の結果が、直前の更新が存在する場合にはそれぞれの直前の更新で得られた結果となり、存在しない場合には第1の結果となる命令を含むことを特徴とする請求項23に記載のコンピュータソフトウェア。
【請求項31】
スナップショット結果を直前の結果と組み合わせる前に、忘却係数を用いて直前の結果に重みづけして指数関数的に減衰する後続のウィンドウを実施するための命令を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【請求項32】
第1の結果が、各場合における第1の先行ウィンドウに関する信号サンプルの平均ベクトルおよびデータ行列の共分散行列を含み、さらに4階テンソルとしてモーメントを求めるための信号ベクトルを得るためのデータ行列の無相関化および正規化を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【請求項33】
スナップショット結果が平均スナップショットベクトルおよびスナップショット共分散行列を含み、コンピュータソフトウェアが、無相関化され正規化されたスナップショット等価量を生成し、その等価量から信号ベクトルおよび4階のテンソル更新としてそのベクトルのモーメントを求め、スナップショット結果を忘却係数pで重みづけし直前の結果を別の忘却係数(1−p)で重みづけして指数関数的に減衰するウィンドウを実施し、0<p<1とし、さらにスナップショット結果を直前の結果と組み合わせる前にそのような重みづけを実施するための命令を含むことを特徴とする請求項30に記載のコンピュータソフトウェア。
【図1】

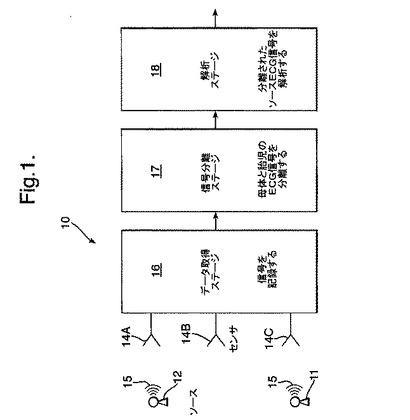
【図2a】
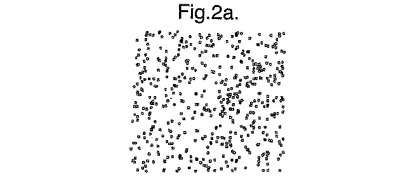
【図2b】

【図2c】
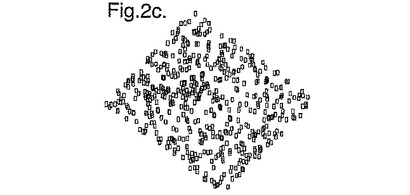
【図2d】
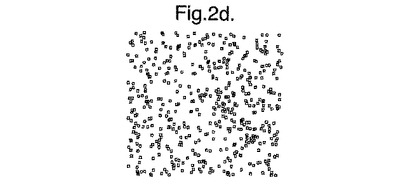
【図3】

【図4】
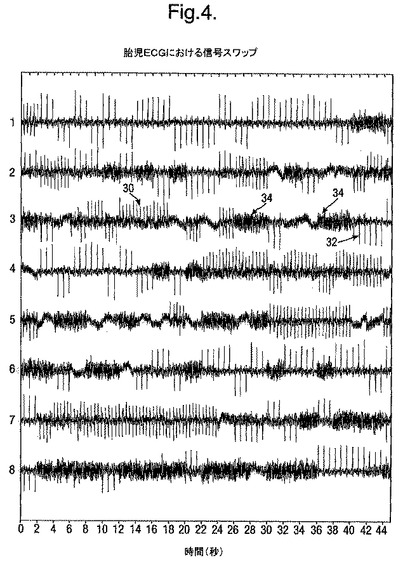
【図5】
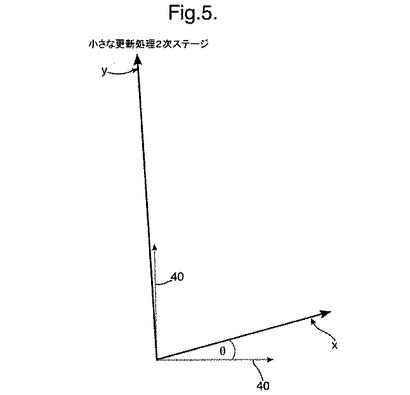
【図6】

【図7】
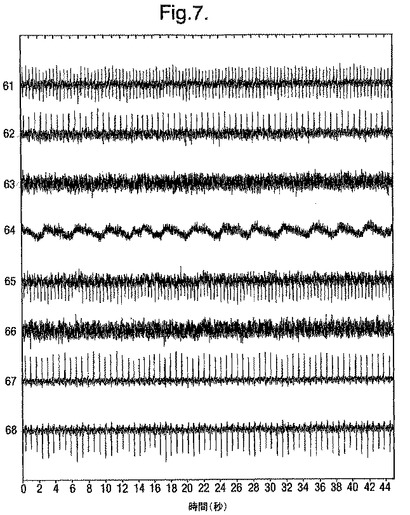
【図8】
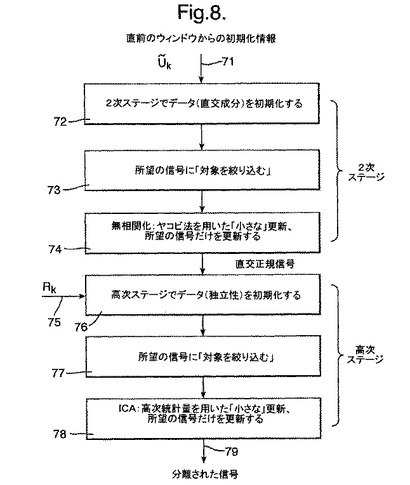
【図9】
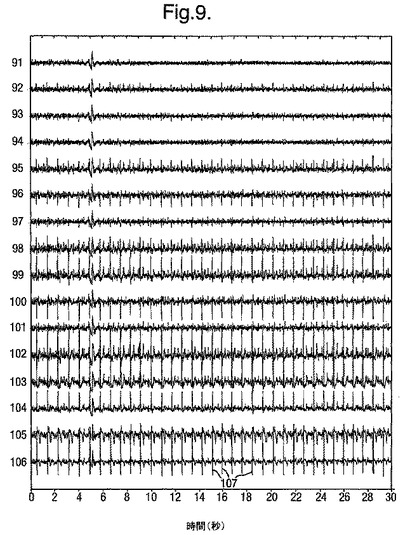
【図10】
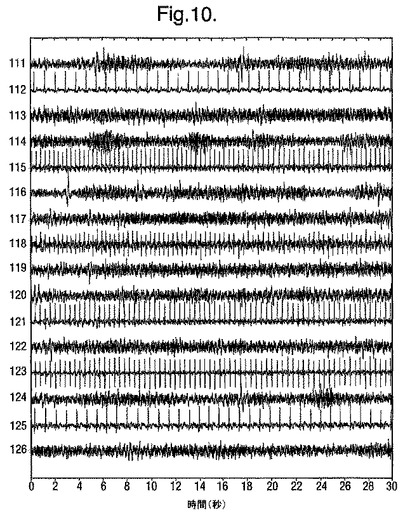
【図11】
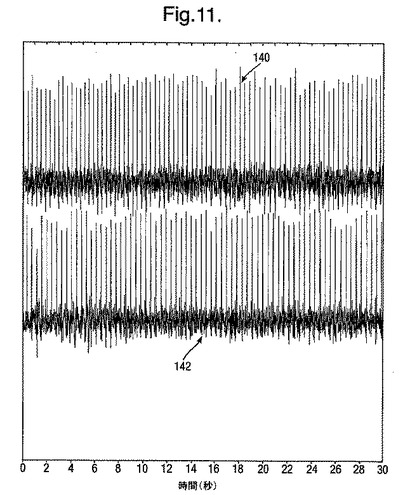
【図12】
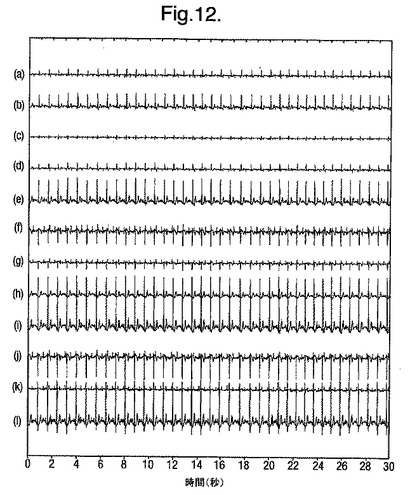
【図13】

【図14a】
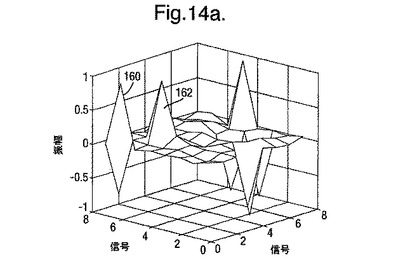
【図14b】
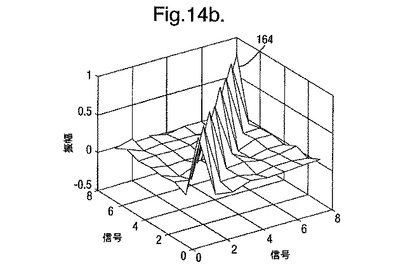
【図15】
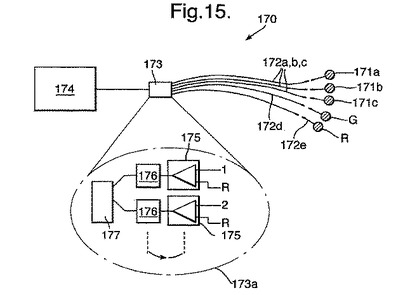
【図16】

【図17】
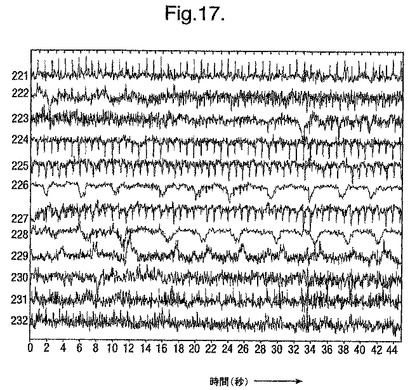
【図2a】
【図2b】
【図2c】
【図2d】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14a】
【図14b】
【図15】
【図16】
【図17】
【公表番号】特表2007−522536(P2007−522536A)
【公表日】平成19年8月9日(2007.8.9)
【国際特許分類】
【出願番号】特願2006−538934(P2006−538934)
【出願日】平成16年11月9日(2004.11.9)
【国際出願番号】PCT/GB2004/004714
【国際公開番号】WO2005/052848
【国際公開日】平成17年6月9日(2005.6.9)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
【公表日】平成19年8月9日(2007.8.9)
【国際特許分類】
【出願日】平成16年11月9日(2004.11.9)
【国際出願番号】PCT/GB2004/004714
【国際公開番号】WO2005/052848
【国際公開日】平成17年6月9日(2005.6.9)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
[ Back to top ]