
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、動的自動利得制御機能を有するセンサインタフェースの方法及びシステムに関する。本出願は、参照によりその全体が本明細書に組み込まれ、本明細書の一部をなす、2011年2月23日に出願された米国特許出願第13/033234号に関連する。
【背景技術】
【0002】
多くの場合、例えば、電動機、発電機、内燃機関、ジェットエンジン、タービンなどのような機械や、これらによって駆動されるシステムは、性能特性及び動作特性(例えば、振動、熱、ノイズなど)、電気的特性(例えば、電流、電圧、抵抗など)、環境影響などに関して、様々な監視システムによる能動的監視が行われる。一般に、これらの機械を監視する監視システムは、その機械の近傍に配置されて、その機械に関連付けられた、1つ以上のトランスデューサを含む。例えば、監視システムは、受動磁気センサや磁気抵抗センサを用いることが可能である。以下では、これらのセンサを単に「センサ」、「磁気センサ」、又は「受動磁気センサ」と称することとし、これらは受動磁気センサ及び磁気抵抗センサを包含するものとする。
【0003】
一般に、受動磁気センサは、永久磁石とコイルとで構成されており、コイルの各側に信号線が接続されている。磁石からは磁界(磁束線)が発生し、これは、磁気センサの端部から空気中に広がる。鉄を含む物体が磁気センサの先端(即ち、プローブチップ)に近づくと、物体と、磁気センサに収容された磁石から発せられた磁界とが相互に作用して、コイルに電流が誘起され、これによって、交流(AC)電圧が発生する。この電圧を、磁気センサ出力として動作する信号線において検出することが可能である。磁束線が充満している領域にターゲットが入り、その後、そこから出ると、これによって、まず正の電圧ピークが発生し、その後に負の電圧ピークが発生する。この電圧出力は、本質的には正弦波状になりうるが、ターゲットの材料組成や形状に応じて歪む可能性がある。受動磁気センサから発生する出力信号の特性には、ターゲットの表面速度、ギャップの大きさ、ターゲットの形状、負荷インピーダンスを含むいくつかの要因が寄与する。
【0004】
表面速度は、ターゲットが磁気センサのプローブチップのそばを通過する際の速度であって、磁気センサから発生するパルスの振幅に直接影響する。ターゲット速度と出力電圧とを関連付ける厳密な関数は磁気センサごとに異なるが、速度と出力電圧との間の相関はほぼ線形関数(比例)である。ギャップの大きさは、ターゲットが磁気センサのプローブチップのそばを通過する際のターゲットとプローブチップとの間の距離を意味し、これも出力電圧に影響を及ぼす。ギャップが小さいほど、出力電圧は大きくなる。磁気センサのギャップの設定値は、およそ25ミルから30ミルが一般的である。一般に、ギャップの大きさと電圧出力との関係は、本質的に非線形である。ギャップを小さくすると、出力電圧が大幅に増加する可能性がある。ターゲットの形状寸法も、出力電圧の振幅及び形状に影響を及ぼす可能性がある。一般に、ターゲットが大きいほど、振幅は大きくなる。磁気センサの内部インピーダンスから見た相対的な負荷インピーダンスは、その負荷によって検出される磁気センサ出力電圧の大きさに影響を及ぼす。磁気センサは、一般に、出力を最大にすることとの整合性を保ちながら実インピーダンスが最小になるように設計される。コイル両端における電圧降下を最小化し、最大出力を負荷に与えるためには、負荷インピーダンスを、磁気センサのインピーダンスとの関連で高くしなければならない。一般に、負荷インピーダンスは、磁気センサの内部インピーダンスの少なくとも10倍にしなければならない。
【0005】
磁気センサを用いることの利点としては、磁気センサが受動的であるために外部電力が不要であること、磁気センサが非常にシンプルな設計であるために信頼性が高いこと、磁気センサが一般に低コストであることなどが挙げられる。しかしながら、これらのセンサを使用することには課題もある。課題の1つは、出力信号の振幅が速度によって大きく変動しうることである。このため、機械の(例えば、ゼロから3600rpmまで加速する)始動時データ特性を解析することが困難になる可能性がある。例えば、磁気センサの出力電圧は、ターゲットの通過速度に対して大幅に(例えば、10mVp−pから200Vp−pまで)変化する。この特性が問題になる可能性があるのは、ターゲットが低速で通過する際の磁気センサ出力を、ターゲットが高速で通過する際の出力と同じ精度で監視する場合である。低速の信号の場合は、信号対ノイズ比を改善するために増幅することが必要であるのに対し、高速の信号の場合は、回路上の制約によるクリッピングや歪みを防ぐために減衰させることが必要である。又、別の課題として、磁気センサが受動的であるために、磁気ピックアップの駆動力が小さく、ケーブルが長い場合には信号を駆動することができない。更に、磁気センサは、正確なギャップ読み(gap reading)には使用できない。振幅はギャップを表すことが可能であるが、与えられた出力電圧から、ギャップの大きさを正確に決定することはできない。これは、上述のように、他の様々な要因が出力に影響を及ぼすためである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6133728号明細書
【発明の概要】
【0007】
そこで、当該技術分野における課題(そのいくつかは上述のとおりである)を克服するシステム及び方法が必要とされている。具体的には、ターゲットが低速で通過する際の磁気センサ出力及び同じターゲットが高速で通過する際の磁気センサ出力の精度を改善できる動的自動利得制御機能を磁気センサに与えることが、上述の課題に対処する上で有用であろう。
【0008】
本明細書に記載の本発明の実施形態は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。
【0009】
一態様では、方法を示す。本方法は、センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。
【0010】
別の態様では、システムを示す。本システムは、時間とともに振幅が変化する交流差動電圧信号を発生させるように構成されたセンサを含む。更に、本システムは、交流差動電圧信号を受信し、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、第1の回路を含む。第2の回路は、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。
【0011】
更なる利点は、その一部が下記の記述において記載されているか、或いは実践を通じて習得可能である。これらの利点は、添付の特許請求の範囲で特記した要素及び組み合わせによって実現及び達成されよう。上記の概要及び下記の記述は、クレームされている通り、あくまでも例示及び説明のためのものであって、限定的なものではないことを理解されたい。
【0012】
添付図面は、本明細書に組み込まれていて本明細書の一部をなすものであり、実施形態を図示し、本明細書とともに、本方法及びシステムの原理を説明する役割を担っている。
【図面の簡単な説明】
【0013】
【図1】本発明によるシステムの一実施形態のブロック図である。
【図2】本発明の一態様による、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することが可能な回路の一実施形態の回路図である。
【図3】本発明の一態様による、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることが可能な回路の一実施形態の回路図である。
【図4】磁気センサの動的自動利得制御を行うために可能な操作を示すフローチャートである。
【図5】本開示の方法を実行するための一例示的動作環境を示すブロック図である。
【発明を実施するための形態】
【0014】
本方法及びシステムを開示及び記述する前に、本方法及びシステムが特定の統合方法、特定の部品、又は特定の構成に限定されることはない、ということを理解されたい。また、本明細書で使用する用語は、あくまでも特定の実施形態を記述するためのものであって、限定を意図したものではない。
【0015】
本明細書及び添付の特許請求の範囲で使用する際、文脈上明記しない限り、単数名詞は複数の指示対象も包含する。「約〜(或る特定の値)から、及び/又は、約・・・(別の特定の値)まで」という形で範囲を表現することがある。こうした範囲表現のときは、別の実施形態が、上記或る特定の値から、及び/又は、上記別の特定の値を含む。同様に、近似値として値を表現するときは、「約」を先立って使用することにより、その特定の値が別の実施形態を構成することが理解できよう。また、各範囲の端点は、別の端点に関して有意であり、且つ別の端点とは別個に有意である。更に、本明細書において範囲を例示するときは、示されている範囲には、特に明記しない限り、その間にある部分的な範囲も全て含まれることを認識されたい。
【0016】
「任意の」又は「任意で」とは、これに続いて記述される事象又は状況が生じることも生じないこともあり、当該記述には、当該事象又は状況が生じる場合も、当該事象又は状況が生じない場合も含まれることを意味する。
【0017】
本明細書及び特許請求の範囲を通じて、「有する」や、その変形である「備える」「含む」等の変形は、「〜を含むがそれに限定されない」ことを意味しており、例えば、その他の追加物、部品、整数値、又はステップ等を排除することを意図したものではない。「例示的な」とは、「〜の一例」であることを意味し、好適又は理想的な実施形態を示唆することを意図したものではない。「〜等の」は、限定的な意味で用いられるのではなく、説明するために用いられる。
【0018】
開示されるのは、開示の方法及びシステムの実施に使用可能な部品である。本明細書では、これら及びその他の部品を開示するが、これらの部品の組み合わせ、サブセット、相互作用、集合等を開示する際、これらの個々の及び集合的な組み合わせ及び置換が明記されていないこともあるが、本明細書では、全ての方法及びシステムについて、それぞれが具体的に熟慮されたものであることを理解されたい。このことは、(これに限定されることはないが)開示の方法ステップを含む、本願の全ての態様についても同じである。従って、実施可能な様々なステップが更に存在する場合、これらの更なるステップを、いずれの特定の実施形態とも一緒に実施可能であり、或いは、開示の方法の実施形態のいずれの組み合わせにおいても実施可能であることを理解されたい。
【0019】
好適な実施形態及びその中に含まれる実施例の詳細な説明を参照することにより、本方法及びシステムを容易に理解できる。
【0020】
本明細書に記載のとおり、本明細書に記載の本発明の実施形態は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。磁気センサの出力電圧は、ターゲットの通過速度に対して大幅に(例えば、10mVp−pから200Vp−pまで)変化する。この特性が問題になるのは、ターゲットが低速で通過する際のセンサ出力を、ターゲットが高速で通過する際の出力と同じ精度で監視する場合である。低速の信号の場合は、信号対ノイズ比を改善するために増幅することが必要であるのに対し、高速の信号の場合は、回路上の制約によるクリッピングや歪みを防ぐために減衰させることが必要である。そこで、本明細書に記載の実施形態の技術的効果は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって、そのターゲットの性能/挙動を磁気センサで監視する方法を提供することである。本発明の実施形態によれば、以前であればノイズから分離することが困難であった、低振幅信号の信号内容を取り込むことが可能になる。又、実施形態によれば、広範囲のターゲット速度及びこれらに対応する信号振幅にわたって信号対ノイズ比を動的スケーリングによって高めることが可能になる。
【0021】
本明細書に記載のシステム及び方法は、入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することが可能な磁気センサインタフェース回路を提供する。一態様では、本インタフェースは、磁気センサから差動電圧を受信する。この差動電圧は、シングルエンデッド電圧信号に変換され、(必要であれば)信号のクリッピングを防ぐために減衰される。減衰済みシングルエンデッド電圧信号は、信号対ノイズ比に応じて、信号波形をクリッピング又は変形させることなくスケーリング(増幅又は減衰)される。一態様では、減衰済みシングルエンデッド電圧信号は、信号波形の信号対ノイズ比を改善又は最大化するようにスケーリング(増幅又は減衰)される。一態様では、この増幅又は減衰は、デジタルプロセッサ又はフィールドプログラマブルゲートアレイ(FPGA)内のアルゴリズムによって選択され、このアルゴリズムは、アナログデジタル変換器(ADC)を用いて入力信号を継続的に監視する。ADCは、磁気センサの両端の接点で検出されたアナログ電圧のデジタル表現を出力する。ADCは、その入力を、上述のスケーリングされた減衰済みシングルエンデッド電圧から受け取る。これによって与えられるフィードバックループにより、本発明の実施形態は、クリッピング又は信号変形の発生を検出し、これが発生しないようにスケーリングを調節することが可能である。
【0022】
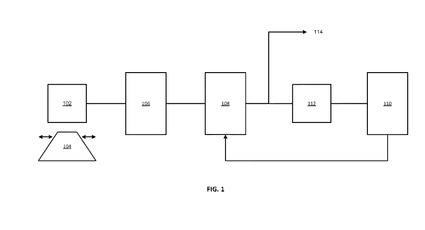
図1は、本発明の一実施形態の概略ブロック図を示す。センサ102は、センサ102のそばを通過するターゲット104を検出する。本明細書に記載のように、一態様では、センサ102は、当業者であれば周知の受動磁気センサ又は磁気抵抗センサであってよい。一態様では、ターゲット104がセンサ102のそばを通過すると、センサ102から電圧パルス又は信号が発生する。別の態様では、センサ102がターゲット104のそばを通過すると、電圧信号が発生する。センサ102から発生した電圧信号は、いくつかの要因に関連しており、それらは、ターゲット104の材料、ターゲット104の幾何形状又は形状、ターゲット104とセンサ102との間のギャップの大きさ、ターゲット104がセンサ102のそばを通過する(又はセンサ102がターゲット104のそばを通過する)際の速度などである。一態様では、電圧信号は、交流差動電圧パルス(即ち、グラウンド又は他のいずれかの共通ポイントを基準としない信号)である。一態様では、電圧信号は、水平(ゼロ)軸に関して対称であっても非対称であってもよい。この交流電圧信号の振幅は、ターゲット104がセンサ102に近づき、センサ102の下方を通り、センサ102を通過する際に(又はセンサ102がターゲット104に近づき、ターゲット104を通過する際に)、時間とともに変化する。一態様では、この交流電圧信号は、正弦波である。一態様では、この交流電圧信号は、正弦波ではない。一態様では、センサ102は、多くの様々なメーカーのいずれかから入手可能な受動磁気センサである。一態様では、センサ102は、AI−Tek Instruments,Inc.(コネチカット州チェシャー)から入手可能な受動磁気センサ又は可変磁気抵抗センサであってよい。一態様では、センサ102は、AI−Tek 70085−1010型受動磁気センサであってよい。ターゲット104は、様々な装置であってよい。一態様では、ターゲット104は、タービン(例えば、蒸気タービン、ガスタービンなど)のブレードであってよい。一態様では、ターゲット104は、圧縮機(例えば、ガスタービンなどで使用される圧縮機など)のブレードであってよい。一態様では、ターゲット104は、歯車の歯であってよい。
【0023】
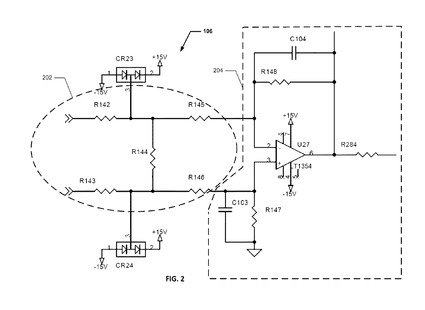
一態様では、センサ102から発生する交流差動電圧信号は、回路106によって受信される。一態様では、回路106は、交流差動電圧信号を受信し、この交流差動電圧信号を減衰済みシングルエンデッド電圧信号(即ち、グラウンド又は別の共通ポイントを基準とする信号)に変換する。一態様では、回路106は、交流差動電圧信号のピークツーピーク値に応じて、交流差動電圧信号を減衰させるか増幅する。一態様では、回路106は、交流差動電圧を固定量だけ減衰させる(即ち、交流差動電圧のピークツーピーク値を常に10パーセントだけ、15パーセントだけ、20パーセントだけ、というように減少させる)。一態様では、回路106は、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する。これは、減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、交流差動電圧信号を固定量だけ減衰させることにより、行う。一態様では、回路106は、交流差動電圧信号を、減衰済みシングルエンデッド電圧信号に変換する。これは、交流差動電圧信号の最大ピークツーピーク値に対する減衰済み最大電圧の比を交流差動電圧信号に乗じることにより、行う。一態様では、交流差動電圧信号の最大ピークツーピーク値は、約250ボルトピークツーピークであってよく、減衰済みシングルエンデッド電圧信号の減衰済み最大電圧は、約30ボルトピークツーピークであってよい。一態様では、回路106は、図2に示すように、抵抗分割器202と、シングルエンデッド出力を有する演算増幅器204とを含んでいる。図2は、本発明の一態様による、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することが可能な回路106の一実施形態の回路図である。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、抵抗分割器202を用いて交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器204に差動入力を与えることと、を含む。限定ではない一例として、抵抗分割器202は、R142=4.99キロオーム、R143=4.99キロオーム、R144=3.01キロオーム、R145=121キロオーム、及びR146=121キロオームの値を有するレジスタを含んでよい。又、限定ではない一例として、シングルエンデッド出力を有する演算増幅器回路204は、R147=49.9キロオーム、R148=49.9キロオーム、R284=2.0キロオーム、C103=5.6ピコファラド、及びC104=5.6ピコファラドの値を有するレジスタ及びキャパシタを含んでよい。図2の回路は、限定ではない例として示したものであり、同じ機能を別の回路で実現することも可能であることを理解されたい。
【0024】
図1を参照すると、減衰済みシングルエンデッド電圧信号は、スケーリング係数を乗じられることにより、動的にスケーリングされる。一態様では、スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。一態様では、スケーリング係数は、信号波形の信号対ノイズ比を改善又は最大化するように選択される。一態様では、回路106は、減衰済みシングルエンデッド電圧信号を第2の回路108に与える。第2の回路108は、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。一態様では、第2の回路108に関連付けられたフィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサ110が、スケーリング係数と減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように、スケーリング係数を自動的に設定する。一態様では、最大入力信号電圧は、約6.5ボルトピークツーピークであってよい。一態様では、第2の回路108に関連付けられたFPGA又はデジタルプロセッサ110は、あるアルゴリズムに従ってスケーリング係数を自動的に設定する。一態様では、このアルゴリズムは、FPGA又はデジタルプロセッサ110が、センサ102から発生した交流差動電圧信号を表すデジタル入力を受信し、この入力に比例するように減衰済みシングルエンデッド電圧信号をスケーリングすることを含む。一態様では、このデジタル入力は、アナログデジタル変換器(ADC)112によってデジタル信号に変換された、第2の回路108のスケーリング出力を含む。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、低い方の所定値ValueLを下回った場合には、減衰済みシングルエンデッド電圧信号の信号対ノイズ比を高めるために、スケーリング係数は1より大きくなり、減衰済みシングルエンデッド電圧信号は増幅される。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、低い方の所定値ValueL又は高い方の所定値ValueUと等しいか、ValueLとValueUとの間にある場合には、スケーリング係数は1になり、減衰済みシングルエンデッド電圧信号は増幅も減衰も行われない。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、高い方の所定値ValueUを上回った場合には、信号のクリッピング又は歪みを防ぐために、スケーリング係数は1未満になり、減衰済みシングルエンデッド電圧信号は更に減衰される。一態様では、回路108の出力114を監視システム(例えば、タービン、圧縮機などのブレード健康状態監視システム)に与えることが可能である。一態様では、出力114の値は、最大入力電圧レベル以下であってよい。一態様では、最大入力電圧信号の値は、監視システムの動作特性及び仕様によって決定されてよい。一態様では、最大入力電圧信号の値は、ADC112の動作特性及び仕様によって決定されてよい。
【0025】
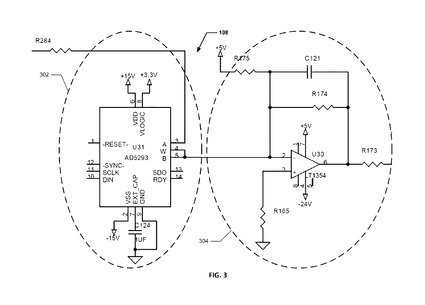
次に図1及び図3を参照すると、一態様では、減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路108は、スケーリング演算増幅器回路304を使用して、減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路108であり、スケーリング演算増幅器回路304は、FPGA又はデジタルプロセッサ110によって制御されるデジタルポテンショメータ302を有する。FPGA又はデジタルプロセッサ110は、上述のアルゴリズムに従って減衰済みシングルエンデッド電圧信号を動的にスケーリングするデジタルポテンショメータ302に入力を与える。一態様では、FPGA又はデジタルプロセッサ110は、減衰済みシングルエンデッド電圧信号のデジタル表現をADC112から受信し、スケーリング係数と減衰済みシングルエンデッド電圧レベルとの積が最大入力信号電圧以下になるようにデジタルポテンショメータ302を自動的に調節することにより、減衰済みシングルエンデッド電圧信号をスケーリングする。一態様では、スケーリング係数は1以上であり、例えば、1.0、1.1、1.2、2.0、2.5、10.0などである。別の態様では、スケーリング係数は1未満であり、例えば、0.95、0.90、0.5、0.33、0.10、0.01などである。
【0026】
図3は、本発明の一態様による、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることが可能な回路108の一実施形態の回路図である。一態様では、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、スケーリング演算増幅器回路304の出力の信号対ノイズ比が改善されるように、且つ、その出力が、信号のクリッピング又は歪みを発生させるほど大きくならないように、FPGA又はプロセッサ110が、上述のアルゴリズムに従ってデジタルポテンショメータ302を自動的に調節することを含む。一態様では、出力の信号対ノイズ比は最大化される。一態様では、デジタルポテンショメータ302の出力がスケーリング演算増幅器回路304に入力されて、スケーリング演算増幅器回路304の出力の動的スケーリングが行われる。限定ではない一例として、デジタルポテンショメータ302は更に、値が1マイクロファラドであるキャパシタC124を含んでよい。又、限定ではない一例として、スケーリング演算増幅器回路304は、R173=49.9キロオーム、R174=20.0キロオーム、R175=10.0キロオーム、R165=4.99キロオーム、及びC121=5.6ピコファラドの値を有するレジスタ及びキャパシタを含んでよい。一態様では、デジタルポテンショメータ302は、(例えば、Analog Devices,Inc.(マサチューセッツ州ノーウッド)から入手可能な)単一チャネル、1024ポジションのデジタルポテンショメータであってよい。一態様では、デジタルポテンショメータ302は、Analog Devices,Inc.のAD5293型デジタルポテンショメータであってよい。図3の回路は、限定ではない例として示したものであるが、同じ機能を別の回路で実現することも可能であることを理解されたい。
【0027】
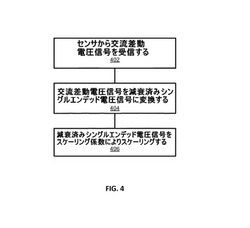
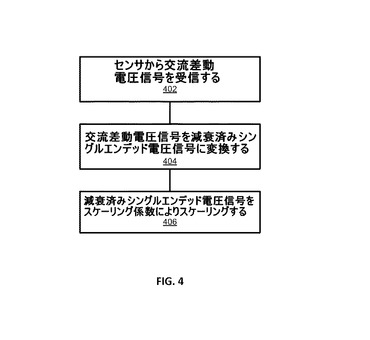
図4は、磁気センサの動的自動利得制御を行うために実施される操作を示している。ステップ402で、センサから交流差動電圧信号を受信する。一態様では、センサは受動磁気センサである。一態様では、センサは可変磁気抵抗センサである。交流差動電圧信号の振幅は、時間とともに変化する。例えば、センサがタービンのブレード台を監視している場合、機械が毎分ゼロ回転(0rpm)から動作速度(例えば、3600rpm)まで立ち上がるにつれて、センサからの交流差動電圧信号の振幅が増加する。これは、センサから発生する交流差動電圧信号が、ターゲットの材料組成、センサとターゲットとの間のギャップ、及びターゲットがセンサのそばを通過する(又はセンサがターゲットのそばを通過する)際の速度に関連しているためである。一態様では、ターゲットはタービンブレードである。ステップ404で、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する。一態様では、交流差動電圧信号は、最大ピークツーピーク値を有しており、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、最大ピークツーピーク値に対する減衰済み最大電圧の比を交流差動電圧信号に乗じることを含む。一態様では、交流差動電圧信号の最大ピークツーピーク値は、約250ボルトピークツーピークであってよく、減衰済みシングルエンデッド電圧信号の減衰済み最大電圧は、約30ボルトピークツーピークであってよい。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、交流差動電圧信号を固定量だけ減衰させることを含む。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、抵抗分割器を用いて交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器に差動入力を与えることと、を含む。ステップ406で、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。一態様では、スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。一態様では、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、本明細書に記載のように、スケーリング係数と減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるようにスケーリング係数を選択することを含む。一態様では、最大入力信号電圧は、約6.5ボルトピークツーピークであってよい。一態様では、減衰済みシングルエンデッド電圧レベルにスケーリング係数を乗じることによって減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、フィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサによって制御されるデジタルポテンショメータを有するスケーリング演算増幅器回路を用いて減衰済みシングルエンデッド電圧信号を動的にスケーリングすることを含む。一態様では、FPGA又はデジタルプロセッサは、減衰済みシングルエンデッド電圧信号のデジタル表現を受信して減衰済みシングルエンデッド電圧信号を動的にスケーリングし、スケーリング係数と減衰済みシングルエンデッド電圧レベルとの積が最大入力信号電圧以下になるようにデジタルポテンショメータを調節する。一態様では、スケーリング係数は1以上であり、例えば、1.0、1.1、1.2、2.0、2.5、10.0などである。別の態様では、スケーリング係数は1未満であり、例えば、0.95、0.90、0.5、0.33、0.10、0.01などである。
【0028】
上述のシステムは、複数のユニット(例えば、FPGA又はデジタルプロセッサ110など)を含むものとして示した。当業者であれば理解されるように、これは機能の説明であり、個々の機能は、ソフトウェア、ハードウェア、又はソフトウェアとハードウェアとの組み合わせにより実現可能である。FPGA又はプロセッサ110のようなユニットは、ソフトウェア、ハードウェア、又はソフトウェアとハードウェアの組み合わせであってよい。これらのユニットは、図5に示された、後述のデジタルポテンショメータ制御ソフトウェア506を含んでよい。一例示的態様では、これらのユニットは、図5に示された、後述のコンピュータ501を含んでよい。一態様では、コンピュータ501のプロセッサ503を用いて、コンピュータ実行可能コードの形で具体化された上述のアルゴリズムを実行し、本明細書に記載のデジタルポテンショメータ302を制御することが可能である。
【0029】
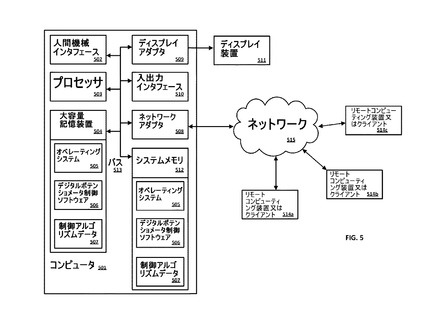
図5は、本開示の方法を実行するための一例示的動作環境を示すブロック図である。この例示的動作環境は、あくまで動作環境の一例であって、動作環境アーキテクチャの用途又は機能性の範囲に関して何らかの制限を与えるものではない。又、動作環境は、この例示的動作環境に示されたいずれかのコンポーネント又はコンポーネントの組み合わせに関連する従属性又は要件を有するものとして解釈されるべきではない。
【0030】
本発明の方法及びシステムは、他の様々な汎用又は専用のコンピューティングシステム環境又は構成とともに動作可能であってよい。本システム及び本方法との使用に好適となりうる周知のコンピューティングシステム、環境、及び/又は構成として、例えば、埋め込み処理ユニット、パーソナルコンピュータ、サーバコンピュータ、ラップトップ装置、マルチプロセッサシステムなどがあるが、これらに限定されない。更なる例として、機械監視システム、プログラマブル民生用電子機器、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ、スマートメータ、スマートグリッドコンポーネント、上述のシステム又は装置のいずれかを含む分散コンピューティング環境、FPGAなどがある。
【0031】
本開示の方法及びシステムの処理は、ソフトウェアコンポーネントによって実行可能である。本開示のシステム及び方法は、1つ以上のコンピュータ又は他の装置によって実行されるコンピュータ実行可能命令(プログラムモジュールなど)の一般的コンテキストの形で説明できる。一般に、プログラムモジュールは、特定のタスクを実行したり、特定の抽象データ型を実装したりするコンピュータコード、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造体などを含む。本開示の方法は又、通信ネットワークを介してリンクされている複数のリモート処理装置によってタスクが実行される、グリッドベースの分散コンピューティング環境においても実施可能である。分散コンピューティング環境では、プログラムモジュールは、ローカルとリモートの両方のコンピュータ記憶媒体(メモリ記憶装置を含む)に配置可能である。
【0032】
更に、当業者であれば理解されるように、本明細書に開示のシステム及び方法は、コンピュータ501の形の汎用コンピューティング装置を用いて実装可能である。コンピュータ501のコンポーネントとしては、限定ではなく、1つ以上のプロセッサ又は処理ユニット503、システムメモリ512、及びプロセッサ503を始めとする各種システムコンポーネントをシステムメモリ512と結合するシステムバス513があってよい。処理ユニット503が複数ある場合、本システムは、並列コンピューティングを利用することが可能である。
【0033】
システムバス513は、いくつかの可能なタイプのバス構造のうちの1つ以上を表しており、可能なタイプのバス構造には、メモリバス又はメモリコントローラ、ペリフェラルバス、アクセラレーテッドグラフィックスポート、及び各種バスアーキテクチャのいずれかを用いたプロセッサバス又はローカルバスが含まれる。例えば、そのようなアーキテクチャとして、ISA(Industry Standard Architecture)バス、MCA(Micro Channel Architecture)バス、EISA(Enhanced ISA)バス、VESA(Video Electronics Standards Association)ローカルバス、AGP(Accelerated Graphics Port)バス、並びに、PCI(Peripheral Component Interconnects)、PCI−Expressバス、PCMCIA(Personal Computer Memory Card Industry Association)、USB(Universal Serial Bus)などがあってよい。バス513、及び本明細書で指定されているすべてのバスは又、有線又は無線のネットワーク接続を用いて実装可能であり、プロセッサ503、大容量記憶装置504、オペレーティングシステム505、デジタルポテンショメータ制御ソフトウェア506、制御アルゴリズムデータ507(例えば、ValueL及びValueUの値、増幅又は減衰の設定、その他)、ネットワークアダプタ508、システムメモリ512、入出力インタフェース510、ディスプレイアダプタ509、ディスプレイ装置511、及び人間機械インタフェース502を含むサブシステムのそれぞれが、物理的に互いに離れた場所にあって、この形のバスを通じて接続されている1つ以上のリモートコンピューティング装置又はクライアント514a、b、cに収容可能であり、実質的に、完全な分散システム又は分散アーキテクチャが実装される。
【0034】
コンピュータ501は、典型的には、様々なコンピュータ可読媒体を含んでいる。例示的な可読媒体としては、持続性であってコンピュータ501からのアクセスが可能な任意の入手可能媒体であってよく、限定ではない例として、揮発性及び不揮発性媒体の両方、リムーバブル及び非リムーバブル媒体の両方がある。システムメモリ512は、揮発性メモリ(ランダムアクセスメモリ(RAM)など)及び/又は不揮発性メモリ(読み出し専用メモリ(ROM)など)の形でコンピュータ可読媒体を含む。システムメモリ512は、典型的には、制御アルゴリズムデータ507などのデータ及び/又はオペレーティングシステム505などのプログラムモジュールと、処理ユニット503から直接アクセス可能な、且つ/又は、処理ユニット503によって現在操作されているデジタルポテンショメータ制御ソフトウェア506とを収容している。
【0035】
別の態様では、コンピュータ501は、他の持続的、リムーバブル/非リムーバブル、揮発性/不揮発性コンピュータ記憶媒体を含んでもよい。例えば、図5は、大容量記憶装置504を示しており、大容量記憶装置504は、コンピュータコード、コンピュータ可読命令、データ構造体、プログラムモジュール、及び他のコンピュータ501用データの不揮発性記憶を行うことが可能である。限定ではない例として、大容量記憶媒体504は、ハードディスク、リムーバブル磁気ディスク、リムーバブル光ディスク、磁気カセットなどの磁気記憶装置、フラッシュメモリカード、CD−ROM、デジタル多用途ディスク(DVD)などの光記憶装置、ランダムアクセスメモリ(RAM)、読み出し専用メモリ(ROM)、電気的消去可能プログラム可能読み出し専用メモリ(EEPROM)などであってよい。
【0036】
オプションで、任意の数のプログラムモジュールを大容量記憶媒体504に記憶させることが可能であり、例えば、オペレーティングシステム505やデジタルポテンショメータ制御ソフトウェア506などを記憶させることが可能である。オペレーティングシステム505及びデジタルポテンショメータ制御ソフトウェア506のそれぞれ(又はこれらの何らかの組み合わせ)は、プログラミング及びデジタルポテンショメータ制御ソフトウェア506の各要素を含むことが可能である。制御アルゴリズムデータ507も、大容量記憶装置504に記憶させることが可能である。制御アルゴリズムデータ507は、当該技術分野において周知の1種類以上のデータベースのいずれかに格納可能である。そのようなデータベースとしては、例えば、DB2(登録商標)、Microsoft(登録商標) Access、Microsoft(登録商標) SQL Server、Oracle(登録商標)、mySQL、PostgreSQLなどがある。これらのデータベースは、集中化しても、複数システムにまたがって分散してもよい。
【0037】
別の態様では、ユーザは、入力装置(図示せず)からコンピュータ501にコマンド及び情報を入力することが可能である。そのような入力装置の限定ではない例として、キーボード、ポインティングデバイス(例えば、「マウス」)、マイクロホン、ジョイスティック、スキャナ、触覚入力装置(手袋や他の身体を覆うもの)などがある。これら及び他の入力装置は、システムバス513に結合された人間機械インタフェース502を介して処理ユニット503に接続可能であるが、他のインタフェース及びバス構造によっても接続可能であり、例えば、パラレルポート、ゲームポート、IEEE 1394ポート(ファイヤワイヤポートとも呼ぶ)、シリアルポート、又はUSB(ユニバーサルシリアルバス)などにより接続可能である。
【0038】
更に別の態様では、ディスプレイアダプタ509などのインタフェースを介して、ディスプレイ装置511をシステムバス513に接続することも可能である。コンピュータ501は、複数のディスプレイアダプタ509を有することが可能であり、且つ、コンピュータ501は、複数のディスプレイ装置511を有することが可能であるとしている。例えば、ディスプレイ装置は、モニタ、LCD(液晶ディスプレイ)、又はプロジェクタであってよい。ディスプレイ装置511に加えて、他の出力ペリフェラル装置として、入出力インタフェース510を介してコンピュータ501と接続可能な、スピーカ(図示せず)やプリンタ(図示せず)などのコンポーネントを含んでもよい。本方法の任意のステップ及び/又は結果を、任意の形で出力装置に出力することが可能である。このような出力は、限定ではなくテキスト、グラフィックス、アニメーション、音声、触感などを含む、任意の視覚的表現形式であってよい。
【0039】
コンピュータ501は、ネットワーク環境において、1つ以上のリモートコンピューティング装置又はクライアント514a、b、cとの論理接続を用いて動作可能である。例えば、リモートコンピューティング装置514は、パーソナルコンピュータ、ポータブルコンピュータ、サーバ、ルータ、ネットワークコンピュータ、スマートメータ、ベンダ又は製造元のコンピューティング装置、スマートグリッドコンポーネント、ピア装置又は他の共通ネットワークノードなどであってよい。コンピュータ501とリモートコンピューティング装置又はクライアント514a、b、cとの間の論理接続は、ローカルエリアネットワーク(LAN)及び一般的なワイドエリアネットワーク(WAN)を介して可能である。そのようなネットワーク接続は、ネットワークアダプタ508を通して可能である。ネットワークアダプタ508は、有線環境でも無線環境でも実装可能である。そのようなネットワーキング環境は、オフィス、企業規模コンピュータネットワーク、イントラネット、及び他のネットワーク515(インターネットなど)においては普通に存在するものである。
【0040】
本明細書では、説明のために、アプリケーションプログラム及び他の実行可能プログラムコンポーネント(オペレーティングシステム505など)を、個別のブロックとして示しているが、そのようなプログラム及びコンポーネントが、様々なタイミングで、コンピューティング装置501の様々な記憶コンポーネントに存在して、コンピュータの1つ以上のデータプロセッサによって実行されることは周知のとおりである。デジタルポテンショメータ制御ソフトウェア506の実装は、何らかの形のコンピュータ可読媒体に格納可能であり、或いは、何らかの形のコンピュータ可読媒体同士の間で送信可能である。本開示のどの方法も、コンピュータ可読媒体上に具体化されたコンピュータ可読命令によって実行可能である。コンピュータ可読媒体は、コンピュータからのアクセスが可能な、任意の入手可能媒体であってよい。限定ではない例として、コンピュータ可読媒体は、「コンピュータ記憶媒体」及び「通信媒体」を含んでよい。「コンピュータ記憶媒体」は、コンピュータ可読命令、データ構造体、プログラムモジュール、又は他のデータのような情報を記憶するための任意の方法又は技術において実装される揮発性及び不揮発性、リムーバブル及び非リムーバブルの媒体を含む。例示的なコンピュータ記憶媒体は、限定ではなく、RAM、ROM、EEPROM、フラッシュメモリなどのメモリ技術、CD−ROM、デジタル多用途ディスク(DVD)などの光記憶装置、磁気カセット、磁気テープ、磁気ディスク記憶装置などの磁気記憶装置、又は他の任意の、所望の情報を記憶することが可能であってコンピュータからのアクセスが可能である媒体などを含む。
【0041】
本方法及びシステムでは、機械学習や反復学習のような人工知能技術を採用することが可能である。そのような技術の限定ではない例として、エキスパートシステム、事例に基づく推論、ベイジアンネットワーク、行動ベースAI、ニューラルネットワーク、ファジーシステム、進化的計算法(例えば、遺伝的アルゴリズム)、群知能(例えば、アントアルゴリズム)、ハイブリッドインテリジェントシステム(例えば、ニューラルネットワークを通じて生成されるエキスパート推論規則、又は統計的学習から得られるプロダクション規則)などがある。
【0042】
以下の実施例は、当業者に向けて、本明細書において特許請求されるシステム、物品、装置、及び/又は方法の構成方法及び評価方法についての完全な開示及び説明を提供することを意図したものであるとともに、単に例示的であることを意図したものであって、本方法及びシステムの範囲を限定することを意図したものではない。数値については正確であるように努めたが、多少の誤差や偏差は容赦されたい。
【0043】
限定ではない一例示的応用では、本発明の実施形態をタービンブレード監視システムで使用することが可能である(ただし、本発明の範囲内では他の用途も予期されている)。例えば、本明細書に記載のセンサ102を用いて、ガスタービン台におけるタービンブレードの到着時刻(TOA)の変化を検出することが可能である。TOAの変化は、ブレードの故障の兆候である可能性がある。
【0044】
工業用ガスタービンにおいては、回転子の完全破壊につながる、圧縮機のブレードの「遊離」事象が問題であった。これらの事象は、ブレードにおいて始まった疲労亀裂が原因であり、これが伝搬して最終的な破壊を引き起こす。ブレードが遊離すると、通常は、回転子の大規模破壊が起こる。壊滅的な故障が発生する前にこの問題を検出するために、ブレード監視システムは、ブレードの到着時刻(TOA)データを計算及び記憶して、工業ガスタービンエンジンの圧縮機台において発達中の亀裂を検出するように設計された。
【0045】
ブレード通過測定の基本原理は、ワンスパーターン(once-per-turn)(キーフェーザ)トランスデューサを用いて時刻基準を設定し、その後、列内の各ブレードごとに、そのブレードがブレード通過検出トランスデューサのそばを通過した際のブレードの到着時刻(TOA)を測定することを含む。TOAの動的変化及び静的変化を解析することにより、亀裂の存在を示している可能性のあるブレード共振周波数のずれ及び/又は静的傾斜を検出する。
【0046】
機械がゼロから全速まで立ち上がるとセンサはある電圧範囲を突き抜けるため(機械の全速時には、ブレードの先端の速度が音速を超える可能性がある)、立ち上がり時には、低電圧時の信号対ノイズ比を改善し、高電圧時の歪みのクリッピングを防ぐために、センサの出力のスケーリング(即ち、増幅又は減衰)を行う必要がある。これにより、タービンブレードの健康状態を監視するために、センサ出力を用いてTOAを計算することが可能になる。従って、本明細書に記載のシステム及び方法の実施形態を用いることにより、前述の要件を満たすことが可能である。
【0047】
上述のように、且つ、当業者であれば理解されるように、本発明の実施形態は、システム、方法、又はコンピュータプログラム製品として構成可能である。従って、本発明の実施形態を構成する様々な手段は、すべてがハードウェアからなる手段、又はすべてがソフトウェアからなる手段、又はソフトウェアとハードウェアの何らかの組み合わせであってよい。更に、本発明の実施形態は、コンピュータ可読記憶媒体において具体化されたコンピュータ可読プログラム命令(例えば、コンピュータソフトウェア)を有する、コンピュータ可読記憶媒体上のコンピュータプログラム製品の形をとることが可能である。任意の好適な、持続的なコンピュータ可読記憶媒体が利用可能であり、具体的には、ハードディスク、CD−ROM、光記憶装置、又は磁気記憶装置などが利用可能である。
【0048】
本発明の実施形態を、方法、装置(即ち、システム)、及びコンピュータプログラム製品のブロック図及びフローチャート図を参照しながら説明してきた。ブロック図及びフローチャート図の各ブロック、並びに、ブロック図及びフローチャート図におけるブロック同士の組み合わせは、それぞれ、コンピュータプログラム命令を含む様々な手段によって実装可能であることが理解されよう。これらのコンピュータプログラム命令は、汎用コンピュータ、専用コンピュータ、又は他のプログラム可能データ処理装置(例えば、図5を参照して上述された1つ以上のプロセッサ503)にロードされて、コンピュータ又は他のプログラム可能データ処理装置において実行されるそれらの命令によって、1つ以上のフローチャートブロックで指定される機能を実装する手段が形成されるように、機械を生成することが可能である。
【0049】
これらのコンピュータプログラム命令は、持続的なコンピュータ可読メモリに格納することも可能であって、コンピュータ又は他のプログラム可能データ処理装置(例えば、図5の1つ以上のプロセッサ503)を、コンピュータ可読メモリに格納されたそれらの命令によって、1つ以上のフローチャートブロックで指定される機能を実装するコンピュータ可読命令を含む製造物が生成されるように、特定の方法で機能させることが可能である。これらのコンピュータプログラム命令は、コンピュータ又は他のプログラム可能データ処理装置にロードされて、そのコンピュータ又は他のプログラム可能データ処理装置において一連の操作ステップを実行させることも可能であり、これによって、そのコンピュータ又は他のプログラム可能データ処理装置において実行される命令が、1つ以上のフローチャートブロックで指定される機能を実装するステップを与えるように、コンピュータ実装プロセスを生成することが可能である。
【0050】
従って、ブロック図及びフローチャート図の各ブロックは、本明細書に記載の各機能を実行する手段の組み合わせ、本明細書に記載の各機能を実行するステップの組み合わせ、及び本明細書に記載の各機能を実行するプログラム命令手段をサポートしている。又、ブロック図及びフローチャート図の各ブロック、並びに、ブロック図及びフローチャート図におけるブロック同士の組み合わせは、本明細書に記載の各機能又は各ステップを実行する専用ハードウェアベースのコンピュータシステム、又は専用ハードウェアとコンピュータ命令との組み合わせによって実装可能であることも理解されよう。
【0051】
別途明記しない限り、本明細書で説明したいかなる方法も、方法ステップを特定の順番で実施することを要件としていると解釈されるべきではない。従って、方法クレームにおいて実際に、そのステップが辿るべき順序を列挙しているか又は請求項において当該ステップが特定の順序に限定される旨の記述がなされていない限り、順序を示唆するものではない。ステップの構成に関する論理、文法構造又は句読点から導き出される明白な意味合い、本明細書に記載の実施形態の数又はタイプを含めた、考えられるあらゆる非明示的な解釈の根拠についても同じことが言える。
【0052】
本明細書を通じて、様々な公報を参照した。これらの公報の開示内容全体が、参照により本明細書に援用され、これによって、本方法及びシステムが関連する最新技術をより完全に記述している。
【0053】
ここで、本発明のこれらの実施形態に付随した、上記の記述及びこれに関連する図面に示した教示の利益を有する、本発明の多くの改変及びその他の実施形態が、当業者には想到されよう。従って、本発明の実施時形態が、開示された特定の実施形態に限定されることはなく、その改変及びその他の実施形態も、添付の特許請求の範囲に含まれることを意図している。また、上記の説明及び関連する図面では、要素及び/機能の或る例示的な組み合わせのコンテキストにおいて実施形態を記述したが、要素及び/機能の異なる組み合わせも、添付の特許請求の範囲から逸脱することなく、変形形態によって提供可能である。この点において、例えば、以上に明記したものとは異なる要素及び/又は機能の組み合わせも、添付の特許請求の範囲のいずれかに記載のものであることも考えられる。本明細書では、特定の用語を用いたが、これらはあくまでも総称的に説明的な意味で用いられたものであって、限定目的で用いられているのではない。
【符号の説明】
【0054】
102 センサ
104 ターゲット
106 回路
108 第2の回路
110 FPGA又はデジタルプロセッサ
112 アナログデジタル変換器(ADC)
114 回路108の出力
202 抵抗分割器
204 シングルエンデッド出力を有する演算増幅器
302 デジタルポテンショメータ
304 スケーリング演算増幅器回路
501 コンピュータ
502 人間機械インタフェース
503 プロセッサユニット
504 大容量記憶装置
505 オペレーティングシステム
506 デジタルポテンショメータ制御ソフトウェア
507 制御アルゴリズムデータ
508 ネットワークアダプタ
509 ディスプレイアダプタ
510 入出力インタフェース
511 ディスプレイ装置
512 システムメモリ
513 システムバス
514 1つ以上のリモートコンピューティング装置又はクライアント
515 ネットワーク
【技術分野】
【0001】
本出願は、動的自動利得制御機能を有するセンサインタフェースの方法及びシステムに関する。本出願は、参照によりその全体が本明細書に組み込まれ、本明細書の一部をなす、2011年2月23日に出願された米国特許出願第13/033234号に関連する。
【背景技術】
【0002】
多くの場合、例えば、電動機、発電機、内燃機関、ジェットエンジン、タービンなどのような機械や、これらによって駆動されるシステムは、性能特性及び動作特性(例えば、振動、熱、ノイズなど)、電気的特性(例えば、電流、電圧、抵抗など)、環境影響などに関して、様々な監視システムによる能動的監視が行われる。一般に、これらの機械を監視する監視システムは、その機械の近傍に配置されて、その機械に関連付けられた、1つ以上のトランスデューサを含む。例えば、監視システムは、受動磁気センサや磁気抵抗センサを用いることが可能である。以下では、これらのセンサを単に「センサ」、「磁気センサ」、又は「受動磁気センサ」と称することとし、これらは受動磁気センサ及び磁気抵抗センサを包含するものとする。
【0003】
一般に、受動磁気センサは、永久磁石とコイルとで構成されており、コイルの各側に信号線が接続されている。磁石からは磁界(磁束線)が発生し、これは、磁気センサの端部から空気中に広がる。鉄を含む物体が磁気センサの先端(即ち、プローブチップ)に近づくと、物体と、磁気センサに収容された磁石から発せられた磁界とが相互に作用して、コイルに電流が誘起され、これによって、交流(AC)電圧が発生する。この電圧を、磁気センサ出力として動作する信号線において検出することが可能である。磁束線が充満している領域にターゲットが入り、その後、そこから出ると、これによって、まず正の電圧ピークが発生し、その後に負の電圧ピークが発生する。この電圧出力は、本質的には正弦波状になりうるが、ターゲットの材料組成や形状に応じて歪む可能性がある。受動磁気センサから発生する出力信号の特性には、ターゲットの表面速度、ギャップの大きさ、ターゲットの形状、負荷インピーダンスを含むいくつかの要因が寄与する。
【0004】
表面速度は、ターゲットが磁気センサのプローブチップのそばを通過する際の速度であって、磁気センサから発生するパルスの振幅に直接影響する。ターゲット速度と出力電圧とを関連付ける厳密な関数は磁気センサごとに異なるが、速度と出力電圧との間の相関はほぼ線形関数(比例)である。ギャップの大きさは、ターゲットが磁気センサのプローブチップのそばを通過する際のターゲットとプローブチップとの間の距離を意味し、これも出力電圧に影響を及ぼす。ギャップが小さいほど、出力電圧は大きくなる。磁気センサのギャップの設定値は、およそ25ミルから30ミルが一般的である。一般に、ギャップの大きさと電圧出力との関係は、本質的に非線形である。ギャップを小さくすると、出力電圧が大幅に増加する可能性がある。ターゲットの形状寸法も、出力電圧の振幅及び形状に影響を及ぼす可能性がある。一般に、ターゲットが大きいほど、振幅は大きくなる。磁気センサの内部インピーダンスから見た相対的な負荷インピーダンスは、その負荷によって検出される磁気センサ出力電圧の大きさに影響を及ぼす。磁気センサは、一般に、出力を最大にすることとの整合性を保ちながら実インピーダンスが最小になるように設計される。コイル両端における電圧降下を最小化し、最大出力を負荷に与えるためには、負荷インピーダンスを、磁気センサのインピーダンスとの関連で高くしなければならない。一般に、負荷インピーダンスは、磁気センサの内部インピーダンスの少なくとも10倍にしなければならない。
【0005】
磁気センサを用いることの利点としては、磁気センサが受動的であるために外部電力が不要であること、磁気センサが非常にシンプルな設計であるために信頼性が高いこと、磁気センサが一般に低コストであることなどが挙げられる。しかしながら、これらのセンサを使用することには課題もある。課題の1つは、出力信号の振幅が速度によって大きく変動しうることである。このため、機械の(例えば、ゼロから3600rpmまで加速する)始動時データ特性を解析することが困難になる可能性がある。例えば、磁気センサの出力電圧は、ターゲットの通過速度に対して大幅に(例えば、10mVp−pから200Vp−pまで)変化する。この特性が問題になる可能性があるのは、ターゲットが低速で通過する際の磁気センサ出力を、ターゲットが高速で通過する際の出力と同じ精度で監視する場合である。低速の信号の場合は、信号対ノイズ比を改善するために増幅することが必要であるのに対し、高速の信号の場合は、回路上の制約によるクリッピングや歪みを防ぐために減衰させることが必要である。又、別の課題として、磁気センサが受動的であるために、磁気ピックアップの駆動力が小さく、ケーブルが長い場合には信号を駆動することができない。更に、磁気センサは、正確なギャップ読み(gap reading)には使用できない。振幅はギャップを表すことが可能であるが、与えられた出力電圧から、ギャップの大きさを正確に決定することはできない。これは、上述のように、他の様々な要因が出力に影響を及ぼすためである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6133728号明細書
【発明の概要】
【0007】
そこで、当該技術分野における課題(そのいくつかは上述のとおりである)を克服するシステム及び方法が必要とされている。具体的には、ターゲットが低速で通過する際の磁気センサ出力及び同じターゲットが高速で通過する際の磁気センサ出力の精度を改善できる動的自動利得制御機能を磁気センサに与えることが、上述の課題に対処する上で有用であろう。
【0008】
本明細書に記載の本発明の実施形態は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。
【0009】
一態様では、方法を示す。本方法は、センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。
【0010】
別の態様では、システムを示す。本システムは、時間とともに振幅が変化する交流差動電圧信号を発生させるように構成されたセンサを含む。更に、本システムは、交流差動電圧信号を受信し、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、第1の回路を含む。第2の回路は、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。
【0011】
更なる利点は、その一部が下記の記述において記載されているか、或いは実践を通じて習得可能である。これらの利点は、添付の特許請求の範囲で特記した要素及び組み合わせによって実現及び達成されよう。上記の概要及び下記の記述は、クレームされている通り、あくまでも例示及び説明のためのものであって、限定的なものではないことを理解されたい。
【0012】
添付図面は、本明細書に組み込まれていて本明細書の一部をなすものであり、実施形態を図示し、本明細書とともに、本方法及びシステムの原理を説明する役割を担っている。
【図面の簡単な説明】
【0013】
【図1】本発明によるシステムの一実施形態のブロック図である。
【図2】本発明の一態様による、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することが可能な回路の一実施形態の回路図である。
【図3】本発明の一態様による、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることが可能な回路の一実施形態の回路図である。
【図4】磁気センサの動的自動利得制御を行うために可能な操作を示すフローチャートである。
【図5】本開示の方法を実行するための一例示的動作環境を示すブロック図である。
【発明を実施するための形態】
【0014】
本方法及びシステムを開示及び記述する前に、本方法及びシステムが特定の統合方法、特定の部品、又は特定の構成に限定されることはない、ということを理解されたい。また、本明細書で使用する用語は、あくまでも特定の実施形態を記述するためのものであって、限定を意図したものではない。
【0015】
本明細書及び添付の特許請求の範囲で使用する際、文脈上明記しない限り、単数名詞は複数の指示対象も包含する。「約〜(或る特定の値)から、及び/又は、約・・・(別の特定の値)まで」という形で範囲を表現することがある。こうした範囲表現のときは、別の実施形態が、上記或る特定の値から、及び/又は、上記別の特定の値を含む。同様に、近似値として値を表現するときは、「約」を先立って使用することにより、その特定の値が別の実施形態を構成することが理解できよう。また、各範囲の端点は、別の端点に関して有意であり、且つ別の端点とは別個に有意である。更に、本明細書において範囲を例示するときは、示されている範囲には、特に明記しない限り、その間にある部分的な範囲も全て含まれることを認識されたい。
【0016】
「任意の」又は「任意で」とは、これに続いて記述される事象又は状況が生じることも生じないこともあり、当該記述には、当該事象又は状況が生じる場合も、当該事象又は状況が生じない場合も含まれることを意味する。
【0017】
本明細書及び特許請求の範囲を通じて、「有する」や、その変形である「備える」「含む」等の変形は、「〜を含むがそれに限定されない」ことを意味しており、例えば、その他の追加物、部品、整数値、又はステップ等を排除することを意図したものではない。「例示的な」とは、「〜の一例」であることを意味し、好適又は理想的な実施形態を示唆することを意図したものではない。「〜等の」は、限定的な意味で用いられるのではなく、説明するために用いられる。
【0018】
開示されるのは、開示の方法及びシステムの実施に使用可能な部品である。本明細書では、これら及びその他の部品を開示するが、これらの部品の組み合わせ、サブセット、相互作用、集合等を開示する際、これらの個々の及び集合的な組み合わせ及び置換が明記されていないこともあるが、本明細書では、全ての方法及びシステムについて、それぞれが具体的に熟慮されたものであることを理解されたい。このことは、(これに限定されることはないが)開示の方法ステップを含む、本願の全ての態様についても同じである。従って、実施可能な様々なステップが更に存在する場合、これらの更なるステップを、いずれの特定の実施形態とも一緒に実施可能であり、或いは、開示の方法の実施形態のいずれの組み合わせにおいても実施可能であることを理解されたい。
【0019】
好適な実施形態及びその中に含まれる実施例の詳細な説明を参照することにより、本方法及びシステムを容易に理解できる。
【0020】
本明細書に記載のとおり、本明細書に記載の本発明の実施形態は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。磁気センサの出力電圧は、ターゲットの通過速度に対して大幅に(例えば、10mVp−pから200Vp−pまで)変化する。この特性が問題になるのは、ターゲットが低速で通過する際のセンサ出力を、ターゲットが高速で通過する際の出力と同じ精度で監視する場合である。低速の信号の場合は、信号対ノイズ比を改善するために増幅することが必要であるのに対し、高速の信号の場合は、回路上の制約によるクリッピングや歪みを防ぐために減衰させることが必要である。そこで、本明細書に記載の実施形態の技術的効果は、所与のターゲットの速度範囲全体(0〜最大rpm)にわたって、そのターゲットの性能/挙動を磁気センサで監視する方法を提供することである。本発明の実施形態によれば、以前であればノイズから分離することが困難であった、低振幅信号の信号内容を取り込むことが可能になる。又、実施形態によれば、広範囲のターゲット速度及びこれらに対応する信号振幅にわたって信号対ノイズ比を動的スケーリングによって高めることが可能になる。
【0021】
本明細書に記載のシステム及び方法は、入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することが可能な磁気センサインタフェース回路を提供する。一態様では、本インタフェースは、磁気センサから差動電圧を受信する。この差動電圧は、シングルエンデッド電圧信号に変換され、(必要であれば)信号のクリッピングを防ぐために減衰される。減衰済みシングルエンデッド電圧信号は、信号対ノイズ比に応じて、信号波形をクリッピング又は変形させることなくスケーリング(増幅又は減衰)される。一態様では、減衰済みシングルエンデッド電圧信号は、信号波形の信号対ノイズ比を改善又は最大化するようにスケーリング(増幅又は減衰)される。一態様では、この増幅又は減衰は、デジタルプロセッサ又はフィールドプログラマブルゲートアレイ(FPGA)内のアルゴリズムによって選択され、このアルゴリズムは、アナログデジタル変換器(ADC)を用いて入力信号を継続的に監視する。ADCは、磁気センサの両端の接点で検出されたアナログ電圧のデジタル表現を出力する。ADCは、その入力を、上述のスケーリングされた減衰済みシングルエンデッド電圧から受け取る。これによって与えられるフィードバックループにより、本発明の実施形態は、クリッピング又は信号変形の発生を検出し、これが発生しないようにスケーリングを調節することが可能である。
【0022】
図1は、本発明の一実施形態の概略ブロック図を示す。センサ102は、センサ102のそばを通過するターゲット104を検出する。本明細書に記載のように、一態様では、センサ102は、当業者であれば周知の受動磁気センサ又は磁気抵抗センサであってよい。一態様では、ターゲット104がセンサ102のそばを通過すると、センサ102から電圧パルス又は信号が発生する。別の態様では、センサ102がターゲット104のそばを通過すると、電圧信号が発生する。センサ102から発生した電圧信号は、いくつかの要因に関連しており、それらは、ターゲット104の材料、ターゲット104の幾何形状又は形状、ターゲット104とセンサ102との間のギャップの大きさ、ターゲット104がセンサ102のそばを通過する(又はセンサ102がターゲット104のそばを通過する)際の速度などである。一態様では、電圧信号は、交流差動電圧パルス(即ち、グラウンド又は他のいずれかの共通ポイントを基準としない信号)である。一態様では、電圧信号は、水平(ゼロ)軸に関して対称であっても非対称であってもよい。この交流電圧信号の振幅は、ターゲット104がセンサ102に近づき、センサ102の下方を通り、センサ102を通過する際に(又はセンサ102がターゲット104に近づき、ターゲット104を通過する際に)、時間とともに変化する。一態様では、この交流電圧信号は、正弦波である。一態様では、この交流電圧信号は、正弦波ではない。一態様では、センサ102は、多くの様々なメーカーのいずれかから入手可能な受動磁気センサである。一態様では、センサ102は、AI−Tek Instruments,Inc.(コネチカット州チェシャー)から入手可能な受動磁気センサ又は可変磁気抵抗センサであってよい。一態様では、センサ102は、AI−Tek 70085−1010型受動磁気センサであってよい。ターゲット104は、様々な装置であってよい。一態様では、ターゲット104は、タービン(例えば、蒸気タービン、ガスタービンなど)のブレードであってよい。一態様では、ターゲット104は、圧縮機(例えば、ガスタービンなどで使用される圧縮機など)のブレードであってよい。一態様では、ターゲット104は、歯車の歯であってよい。
【0023】
一態様では、センサ102から発生する交流差動電圧信号は、回路106によって受信される。一態様では、回路106は、交流差動電圧信号を受信し、この交流差動電圧信号を減衰済みシングルエンデッド電圧信号(即ち、グラウンド又は別の共通ポイントを基準とする信号)に変換する。一態様では、回路106は、交流差動電圧信号のピークツーピーク値に応じて、交流差動電圧信号を減衰させるか増幅する。一態様では、回路106は、交流差動電圧を固定量だけ減衰させる(即ち、交流差動電圧のピークツーピーク値を常に10パーセントだけ、15パーセントだけ、20パーセントだけ、というように減少させる)。一態様では、回路106は、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する。これは、減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、交流差動電圧信号を固定量だけ減衰させることにより、行う。一態様では、回路106は、交流差動電圧信号を、減衰済みシングルエンデッド電圧信号に変換する。これは、交流差動電圧信号の最大ピークツーピーク値に対する減衰済み最大電圧の比を交流差動電圧信号に乗じることにより、行う。一態様では、交流差動電圧信号の最大ピークツーピーク値は、約250ボルトピークツーピークであってよく、減衰済みシングルエンデッド電圧信号の減衰済み最大電圧は、約30ボルトピークツーピークであってよい。一態様では、回路106は、図2に示すように、抵抗分割器202と、シングルエンデッド出力を有する演算増幅器204とを含んでいる。図2は、本発明の一態様による、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することが可能な回路106の一実施形態の回路図である。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、抵抗分割器202を用いて交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器204に差動入力を与えることと、を含む。限定ではない一例として、抵抗分割器202は、R142=4.99キロオーム、R143=4.99キロオーム、R144=3.01キロオーム、R145=121キロオーム、及びR146=121キロオームの値を有するレジスタを含んでよい。又、限定ではない一例として、シングルエンデッド出力を有する演算増幅器回路204は、R147=49.9キロオーム、R148=49.9キロオーム、R284=2.0キロオーム、C103=5.6ピコファラド、及びC104=5.6ピコファラドの値を有するレジスタ及びキャパシタを含んでよい。図2の回路は、限定ではない例として示したものであり、同じ機能を別の回路で実現することも可能であることを理解されたい。
【0024】
図1を参照すると、減衰済みシングルエンデッド電圧信号は、スケーリング係数を乗じられることにより、動的にスケーリングされる。一態様では、スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。一態様では、スケーリング係数は、信号波形の信号対ノイズ比を改善又は最大化するように選択される。一態様では、回路106は、減衰済みシングルエンデッド電圧信号を第2の回路108に与える。第2の回路108は、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。一態様では、第2の回路108に関連付けられたフィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサ110が、スケーリング係数と減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように、スケーリング係数を自動的に設定する。一態様では、最大入力信号電圧は、約6.5ボルトピークツーピークであってよい。一態様では、第2の回路108に関連付けられたFPGA又はデジタルプロセッサ110は、あるアルゴリズムに従ってスケーリング係数を自動的に設定する。一態様では、このアルゴリズムは、FPGA又はデジタルプロセッサ110が、センサ102から発生した交流差動電圧信号を表すデジタル入力を受信し、この入力に比例するように減衰済みシングルエンデッド電圧信号をスケーリングすることを含む。一態様では、このデジタル入力は、アナログデジタル変換器(ADC)112によってデジタル信号に変換された、第2の回路108のスケーリング出力を含む。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、低い方の所定値ValueLを下回った場合には、減衰済みシングルエンデッド電圧信号の信号対ノイズ比を高めるために、スケーリング係数は1より大きくなり、減衰済みシングルエンデッド電圧信号は増幅される。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、低い方の所定値ValueL又は高い方の所定値ValueUと等しいか、ValueLとValueUとの間にある場合には、スケーリング係数は1になり、減衰済みシングルエンデッド電圧信号は増幅も減衰も行われない。一態様では、FPGA又はデジタルプロセッサ110へのデジタル入力が、高い方の所定値ValueUを上回った場合には、信号のクリッピング又は歪みを防ぐために、スケーリング係数は1未満になり、減衰済みシングルエンデッド電圧信号は更に減衰される。一態様では、回路108の出力114を監視システム(例えば、タービン、圧縮機などのブレード健康状態監視システム)に与えることが可能である。一態様では、出力114の値は、最大入力電圧レベル以下であってよい。一態様では、最大入力電圧信号の値は、監視システムの動作特性及び仕様によって決定されてよい。一態様では、最大入力電圧信号の値は、ADC112の動作特性及び仕様によって決定されてよい。
【0025】
次に図1及び図3を参照すると、一態様では、減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路108は、スケーリング演算増幅器回路304を使用して、減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路108であり、スケーリング演算増幅器回路304は、FPGA又はデジタルプロセッサ110によって制御されるデジタルポテンショメータ302を有する。FPGA又はデジタルプロセッサ110は、上述のアルゴリズムに従って減衰済みシングルエンデッド電圧信号を動的にスケーリングするデジタルポテンショメータ302に入力を与える。一態様では、FPGA又はデジタルプロセッサ110は、減衰済みシングルエンデッド電圧信号のデジタル表現をADC112から受信し、スケーリング係数と減衰済みシングルエンデッド電圧レベルとの積が最大入力信号電圧以下になるようにデジタルポテンショメータ302を自動的に調節することにより、減衰済みシングルエンデッド電圧信号をスケーリングする。一態様では、スケーリング係数は1以上であり、例えば、1.0、1.1、1.2、2.0、2.5、10.0などである。別の態様では、スケーリング係数は1未満であり、例えば、0.95、0.90、0.5、0.33、0.10、0.01などである。
【0026】
図3は、本発明の一態様による、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることが可能な回路108の一実施形態の回路図である。一態様では、減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、スケーリング演算増幅器回路304の出力の信号対ノイズ比が改善されるように、且つ、その出力が、信号のクリッピング又は歪みを発生させるほど大きくならないように、FPGA又はプロセッサ110が、上述のアルゴリズムに従ってデジタルポテンショメータ302を自動的に調節することを含む。一態様では、出力の信号対ノイズ比は最大化される。一態様では、デジタルポテンショメータ302の出力がスケーリング演算増幅器回路304に入力されて、スケーリング演算増幅器回路304の出力の動的スケーリングが行われる。限定ではない一例として、デジタルポテンショメータ302は更に、値が1マイクロファラドであるキャパシタC124を含んでよい。又、限定ではない一例として、スケーリング演算増幅器回路304は、R173=49.9キロオーム、R174=20.0キロオーム、R175=10.0キロオーム、R165=4.99キロオーム、及びC121=5.6ピコファラドの値を有するレジスタ及びキャパシタを含んでよい。一態様では、デジタルポテンショメータ302は、(例えば、Analog Devices,Inc.(マサチューセッツ州ノーウッド)から入手可能な)単一チャネル、1024ポジションのデジタルポテンショメータであってよい。一態様では、デジタルポテンショメータ302は、Analog Devices,Inc.のAD5293型デジタルポテンショメータであってよい。図3の回路は、限定ではない例として示したものであるが、同じ機能を別の回路で実現することも可能であることを理解されたい。
【0027】
図4は、磁気センサの動的自動利得制御を行うために実施される操作を示している。ステップ402で、センサから交流差動電圧信号を受信する。一態様では、センサは受動磁気センサである。一態様では、センサは可変磁気抵抗センサである。交流差動電圧信号の振幅は、時間とともに変化する。例えば、センサがタービンのブレード台を監視している場合、機械が毎分ゼロ回転(0rpm)から動作速度(例えば、3600rpm)まで立ち上がるにつれて、センサからの交流差動電圧信号の振幅が増加する。これは、センサから発生する交流差動電圧信号が、ターゲットの材料組成、センサとターゲットとの間のギャップ、及びターゲットがセンサのそばを通過する(又はセンサがターゲットのそばを通過する)際の速度に関連しているためである。一態様では、ターゲットはタービンブレードである。ステップ404で、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する。一態様では、交流差動電圧信号は、最大ピークツーピーク値を有しており、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、最大ピークツーピーク値に対する減衰済み最大電圧の比を交流差動電圧信号に乗じることを含む。一態様では、交流差動電圧信号の最大ピークツーピーク値は、約250ボルトピークツーピークであってよく、減衰済みシングルエンデッド電圧信号の減衰済み最大電圧は、約30ボルトピークツーピークであってよい。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、交流差動電圧信号を固定量だけ減衰させることを含む。一態様では、交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、抵抗分割器を用いて交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器に差動入力を与えることと、を含む。ステップ406で、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号を動的にスケーリングする。一態様では、スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。一態様では、減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、本明細書に記載のように、スケーリング係数と減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるようにスケーリング係数を選択することを含む。一態様では、最大入力信号電圧は、約6.5ボルトピークツーピークであってよい。一態様では、減衰済みシングルエンデッド電圧レベルにスケーリング係数を乗じることによって減衰済みシングルエンデッド電圧信号を動的にスケーリングすることは、フィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサによって制御されるデジタルポテンショメータを有するスケーリング演算増幅器回路を用いて減衰済みシングルエンデッド電圧信号を動的にスケーリングすることを含む。一態様では、FPGA又はデジタルプロセッサは、減衰済みシングルエンデッド電圧信号のデジタル表現を受信して減衰済みシングルエンデッド電圧信号を動的にスケーリングし、スケーリング係数と減衰済みシングルエンデッド電圧レベルとの積が最大入力信号電圧以下になるようにデジタルポテンショメータを調節する。一態様では、スケーリング係数は1以上であり、例えば、1.0、1.1、1.2、2.0、2.5、10.0などである。別の態様では、スケーリング係数は1未満であり、例えば、0.95、0.90、0.5、0.33、0.10、0.01などである。
【0028】
上述のシステムは、複数のユニット(例えば、FPGA又はデジタルプロセッサ110など)を含むものとして示した。当業者であれば理解されるように、これは機能の説明であり、個々の機能は、ソフトウェア、ハードウェア、又はソフトウェアとハードウェアとの組み合わせにより実現可能である。FPGA又はプロセッサ110のようなユニットは、ソフトウェア、ハードウェア、又はソフトウェアとハードウェアの組み合わせであってよい。これらのユニットは、図5に示された、後述のデジタルポテンショメータ制御ソフトウェア506を含んでよい。一例示的態様では、これらのユニットは、図5に示された、後述のコンピュータ501を含んでよい。一態様では、コンピュータ501のプロセッサ503を用いて、コンピュータ実行可能コードの形で具体化された上述のアルゴリズムを実行し、本明細書に記載のデジタルポテンショメータ302を制御することが可能である。
【0029】
図5は、本開示の方法を実行するための一例示的動作環境を示すブロック図である。この例示的動作環境は、あくまで動作環境の一例であって、動作環境アーキテクチャの用途又は機能性の範囲に関して何らかの制限を与えるものではない。又、動作環境は、この例示的動作環境に示されたいずれかのコンポーネント又はコンポーネントの組み合わせに関連する従属性又は要件を有するものとして解釈されるべきではない。
【0030】
本発明の方法及びシステムは、他の様々な汎用又は専用のコンピューティングシステム環境又は構成とともに動作可能であってよい。本システム及び本方法との使用に好適となりうる周知のコンピューティングシステム、環境、及び/又は構成として、例えば、埋め込み処理ユニット、パーソナルコンピュータ、サーバコンピュータ、ラップトップ装置、マルチプロセッサシステムなどがあるが、これらに限定されない。更なる例として、機械監視システム、プログラマブル民生用電子機器、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ、スマートメータ、スマートグリッドコンポーネント、上述のシステム又は装置のいずれかを含む分散コンピューティング環境、FPGAなどがある。
【0031】
本開示の方法及びシステムの処理は、ソフトウェアコンポーネントによって実行可能である。本開示のシステム及び方法は、1つ以上のコンピュータ又は他の装置によって実行されるコンピュータ実行可能命令(プログラムモジュールなど)の一般的コンテキストの形で説明できる。一般に、プログラムモジュールは、特定のタスクを実行したり、特定の抽象データ型を実装したりするコンピュータコード、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造体などを含む。本開示の方法は又、通信ネットワークを介してリンクされている複数のリモート処理装置によってタスクが実行される、グリッドベースの分散コンピューティング環境においても実施可能である。分散コンピューティング環境では、プログラムモジュールは、ローカルとリモートの両方のコンピュータ記憶媒体(メモリ記憶装置を含む)に配置可能である。
【0032】
更に、当業者であれば理解されるように、本明細書に開示のシステム及び方法は、コンピュータ501の形の汎用コンピューティング装置を用いて実装可能である。コンピュータ501のコンポーネントとしては、限定ではなく、1つ以上のプロセッサ又は処理ユニット503、システムメモリ512、及びプロセッサ503を始めとする各種システムコンポーネントをシステムメモリ512と結合するシステムバス513があってよい。処理ユニット503が複数ある場合、本システムは、並列コンピューティングを利用することが可能である。
【0033】
システムバス513は、いくつかの可能なタイプのバス構造のうちの1つ以上を表しており、可能なタイプのバス構造には、メモリバス又はメモリコントローラ、ペリフェラルバス、アクセラレーテッドグラフィックスポート、及び各種バスアーキテクチャのいずれかを用いたプロセッサバス又はローカルバスが含まれる。例えば、そのようなアーキテクチャとして、ISA(Industry Standard Architecture)バス、MCA(Micro Channel Architecture)バス、EISA(Enhanced ISA)バス、VESA(Video Electronics Standards Association)ローカルバス、AGP(Accelerated Graphics Port)バス、並びに、PCI(Peripheral Component Interconnects)、PCI−Expressバス、PCMCIA(Personal Computer Memory Card Industry Association)、USB(Universal Serial Bus)などがあってよい。バス513、及び本明細書で指定されているすべてのバスは又、有線又は無線のネットワーク接続を用いて実装可能であり、プロセッサ503、大容量記憶装置504、オペレーティングシステム505、デジタルポテンショメータ制御ソフトウェア506、制御アルゴリズムデータ507(例えば、ValueL及びValueUの値、増幅又は減衰の設定、その他)、ネットワークアダプタ508、システムメモリ512、入出力インタフェース510、ディスプレイアダプタ509、ディスプレイ装置511、及び人間機械インタフェース502を含むサブシステムのそれぞれが、物理的に互いに離れた場所にあって、この形のバスを通じて接続されている1つ以上のリモートコンピューティング装置又はクライアント514a、b、cに収容可能であり、実質的に、完全な分散システム又は分散アーキテクチャが実装される。
【0034】
コンピュータ501は、典型的には、様々なコンピュータ可読媒体を含んでいる。例示的な可読媒体としては、持続性であってコンピュータ501からのアクセスが可能な任意の入手可能媒体であってよく、限定ではない例として、揮発性及び不揮発性媒体の両方、リムーバブル及び非リムーバブル媒体の両方がある。システムメモリ512は、揮発性メモリ(ランダムアクセスメモリ(RAM)など)及び/又は不揮発性メモリ(読み出し専用メモリ(ROM)など)の形でコンピュータ可読媒体を含む。システムメモリ512は、典型的には、制御アルゴリズムデータ507などのデータ及び/又はオペレーティングシステム505などのプログラムモジュールと、処理ユニット503から直接アクセス可能な、且つ/又は、処理ユニット503によって現在操作されているデジタルポテンショメータ制御ソフトウェア506とを収容している。
【0035】
別の態様では、コンピュータ501は、他の持続的、リムーバブル/非リムーバブル、揮発性/不揮発性コンピュータ記憶媒体を含んでもよい。例えば、図5は、大容量記憶装置504を示しており、大容量記憶装置504は、コンピュータコード、コンピュータ可読命令、データ構造体、プログラムモジュール、及び他のコンピュータ501用データの不揮発性記憶を行うことが可能である。限定ではない例として、大容量記憶媒体504は、ハードディスク、リムーバブル磁気ディスク、リムーバブル光ディスク、磁気カセットなどの磁気記憶装置、フラッシュメモリカード、CD−ROM、デジタル多用途ディスク(DVD)などの光記憶装置、ランダムアクセスメモリ(RAM)、読み出し専用メモリ(ROM)、電気的消去可能プログラム可能読み出し専用メモリ(EEPROM)などであってよい。
【0036】
オプションで、任意の数のプログラムモジュールを大容量記憶媒体504に記憶させることが可能であり、例えば、オペレーティングシステム505やデジタルポテンショメータ制御ソフトウェア506などを記憶させることが可能である。オペレーティングシステム505及びデジタルポテンショメータ制御ソフトウェア506のそれぞれ(又はこれらの何らかの組み合わせ)は、プログラミング及びデジタルポテンショメータ制御ソフトウェア506の各要素を含むことが可能である。制御アルゴリズムデータ507も、大容量記憶装置504に記憶させることが可能である。制御アルゴリズムデータ507は、当該技術分野において周知の1種類以上のデータベースのいずれかに格納可能である。そのようなデータベースとしては、例えば、DB2(登録商標)、Microsoft(登録商標) Access、Microsoft(登録商標) SQL Server、Oracle(登録商標)、mySQL、PostgreSQLなどがある。これらのデータベースは、集中化しても、複数システムにまたがって分散してもよい。
【0037】
別の態様では、ユーザは、入力装置(図示せず)からコンピュータ501にコマンド及び情報を入力することが可能である。そのような入力装置の限定ではない例として、キーボード、ポインティングデバイス(例えば、「マウス」)、マイクロホン、ジョイスティック、スキャナ、触覚入力装置(手袋や他の身体を覆うもの)などがある。これら及び他の入力装置は、システムバス513に結合された人間機械インタフェース502を介して処理ユニット503に接続可能であるが、他のインタフェース及びバス構造によっても接続可能であり、例えば、パラレルポート、ゲームポート、IEEE 1394ポート(ファイヤワイヤポートとも呼ぶ)、シリアルポート、又はUSB(ユニバーサルシリアルバス)などにより接続可能である。
【0038】
更に別の態様では、ディスプレイアダプタ509などのインタフェースを介して、ディスプレイ装置511をシステムバス513に接続することも可能である。コンピュータ501は、複数のディスプレイアダプタ509を有することが可能であり、且つ、コンピュータ501は、複数のディスプレイ装置511を有することが可能であるとしている。例えば、ディスプレイ装置は、モニタ、LCD(液晶ディスプレイ)、又はプロジェクタであってよい。ディスプレイ装置511に加えて、他の出力ペリフェラル装置として、入出力インタフェース510を介してコンピュータ501と接続可能な、スピーカ(図示せず)やプリンタ(図示せず)などのコンポーネントを含んでもよい。本方法の任意のステップ及び/又は結果を、任意の形で出力装置に出力することが可能である。このような出力は、限定ではなくテキスト、グラフィックス、アニメーション、音声、触感などを含む、任意の視覚的表現形式であってよい。
【0039】
コンピュータ501は、ネットワーク環境において、1つ以上のリモートコンピューティング装置又はクライアント514a、b、cとの論理接続を用いて動作可能である。例えば、リモートコンピューティング装置514は、パーソナルコンピュータ、ポータブルコンピュータ、サーバ、ルータ、ネットワークコンピュータ、スマートメータ、ベンダ又は製造元のコンピューティング装置、スマートグリッドコンポーネント、ピア装置又は他の共通ネットワークノードなどであってよい。コンピュータ501とリモートコンピューティング装置又はクライアント514a、b、cとの間の論理接続は、ローカルエリアネットワーク(LAN)及び一般的なワイドエリアネットワーク(WAN)を介して可能である。そのようなネットワーク接続は、ネットワークアダプタ508を通して可能である。ネットワークアダプタ508は、有線環境でも無線環境でも実装可能である。そのようなネットワーキング環境は、オフィス、企業規模コンピュータネットワーク、イントラネット、及び他のネットワーク515(インターネットなど)においては普通に存在するものである。
【0040】
本明細書では、説明のために、アプリケーションプログラム及び他の実行可能プログラムコンポーネント(オペレーティングシステム505など)を、個別のブロックとして示しているが、そのようなプログラム及びコンポーネントが、様々なタイミングで、コンピューティング装置501の様々な記憶コンポーネントに存在して、コンピュータの1つ以上のデータプロセッサによって実行されることは周知のとおりである。デジタルポテンショメータ制御ソフトウェア506の実装は、何らかの形のコンピュータ可読媒体に格納可能であり、或いは、何らかの形のコンピュータ可読媒体同士の間で送信可能である。本開示のどの方法も、コンピュータ可読媒体上に具体化されたコンピュータ可読命令によって実行可能である。コンピュータ可読媒体は、コンピュータからのアクセスが可能な、任意の入手可能媒体であってよい。限定ではない例として、コンピュータ可読媒体は、「コンピュータ記憶媒体」及び「通信媒体」を含んでよい。「コンピュータ記憶媒体」は、コンピュータ可読命令、データ構造体、プログラムモジュール、又は他のデータのような情報を記憶するための任意の方法又は技術において実装される揮発性及び不揮発性、リムーバブル及び非リムーバブルの媒体を含む。例示的なコンピュータ記憶媒体は、限定ではなく、RAM、ROM、EEPROM、フラッシュメモリなどのメモリ技術、CD−ROM、デジタル多用途ディスク(DVD)などの光記憶装置、磁気カセット、磁気テープ、磁気ディスク記憶装置などの磁気記憶装置、又は他の任意の、所望の情報を記憶することが可能であってコンピュータからのアクセスが可能である媒体などを含む。
【0041】
本方法及びシステムでは、機械学習や反復学習のような人工知能技術を採用することが可能である。そのような技術の限定ではない例として、エキスパートシステム、事例に基づく推論、ベイジアンネットワーク、行動ベースAI、ニューラルネットワーク、ファジーシステム、進化的計算法(例えば、遺伝的アルゴリズム)、群知能(例えば、アントアルゴリズム)、ハイブリッドインテリジェントシステム(例えば、ニューラルネットワークを通じて生成されるエキスパート推論規則、又は統計的学習から得られるプロダクション規則)などがある。
【0042】
以下の実施例は、当業者に向けて、本明細書において特許請求されるシステム、物品、装置、及び/又は方法の構成方法及び評価方法についての完全な開示及び説明を提供することを意図したものであるとともに、単に例示的であることを意図したものであって、本方法及びシステムの範囲を限定することを意図したものではない。数値については正確であるように努めたが、多少の誤差や偏差は容赦されたい。
【0043】
限定ではない一例示的応用では、本発明の実施形態をタービンブレード監視システムで使用することが可能である(ただし、本発明の範囲内では他の用途も予期されている)。例えば、本明細書に記載のセンサ102を用いて、ガスタービン台におけるタービンブレードの到着時刻(TOA)の変化を検出することが可能である。TOAの変化は、ブレードの故障の兆候である可能性がある。
【0044】
工業用ガスタービンにおいては、回転子の完全破壊につながる、圧縮機のブレードの「遊離」事象が問題であった。これらの事象は、ブレードにおいて始まった疲労亀裂が原因であり、これが伝搬して最終的な破壊を引き起こす。ブレードが遊離すると、通常は、回転子の大規模破壊が起こる。壊滅的な故障が発生する前にこの問題を検出するために、ブレード監視システムは、ブレードの到着時刻(TOA)データを計算及び記憶して、工業ガスタービンエンジンの圧縮機台において発達中の亀裂を検出するように設計された。
【0045】
ブレード通過測定の基本原理は、ワンスパーターン(once-per-turn)(キーフェーザ)トランスデューサを用いて時刻基準を設定し、その後、列内の各ブレードごとに、そのブレードがブレード通過検出トランスデューサのそばを通過した際のブレードの到着時刻(TOA)を測定することを含む。TOAの動的変化及び静的変化を解析することにより、亀裂の存在を示している可能性のあるブレード共振周波数のずれ及び/又は静的傾斜を検出する。
【0046】
機械がゼロから全速まで立ち上がるとセンサはある電圧範囲を突き抜けるため(機械の全速時には、ブレードの先端の速度が音速を超える可能性がある)、立ち上がり時には、低電圧時の信号対ノイズ比を改善し、高電圧時の歪みのクリッピングを防ぐために、センサの出力のスケーリング(即ち、増幅又は減衰)を行う必要がある。これにより、タービンブレードの健康状態を監視するために、センサ出力を用いてTOAを計算することが可能になる。従って、本明細書に記載のシステム及び方法の実施形態を用いることにより、前述の要件を満たすことが可能である。
【0047】
上述のように、且つ、当業者であれば理解されるように、本発明の実施形態は、システム、方法、又はコンピュータプログラム製品として構成可能である。従って、本発明の実施形態を構成する様々な手段は、すべてがハードウェアからなる手段、又はすべてがソフトウェアからなる手段、又はソフトウェアとハードウェアの何らかの組み合わせであってよい。更に、本発明の実施形態は、コンピュータ可読記憶媒体において具体化されたコンピュータ可読プログラム命令(例えば、コンピュータソフトウェア)を有する、コンピュータ可読記憶媒体上のコンピュータプログラム製品の形をとることが可能である。任意の好適な、持続的なコンピュータ可読記憶媒体が利用可能であり、具体的には、ハードディスク、CD−ROM、光記憶装置、又は磁気記憶装置などが利用可能である。
【0048】
本発明の実施形態を、方法、装置(即ち、システム)、及びコンピュータプログラム製品のブロック図及びフローチャート図を参照しながら説明してきた。ブロック図及びフローチャート図の各ブロック、並びに、ブロック図及びフローチャート図におけるブロック同士の組み合わせは、それぞれ、コンピュータプログラム命令を含む様々な手段によって実装可能であることが理解されよう。これらのコンピュータプログラム命令は、汎用コンピュータ、専用コンピュータ、又は他のプログラム可能データ処理装置(例えば、図5を参照して上述された1つ以上のプロセッサ503)にロードされて、コンピュータ又は他のプログラム可能データ処理装置において実行されるそれらの命令によって、1つ以上のフローチャートブロックで指定される機能を実装する手段が形成されるように、機械を生成することが可能である。
【0049】
これらのコンピュータプログラム命令は、持続的なコンピュータ可読メモリに格納することも可能であって、コンピュータ又は他のプログラム可能データ処理装置(例えば、図5の1つ以上のプロセッサ503)を、コンピュータ可読メモリに格納されたそれらの命令によって、1つ以上のフローチャートブロックで指定される機能を実装するコンピュータ可読命令を含む製造物が生成されるように、特定の方法で機能させることが可能である。これらのコンピュータプログラム命令は、コンピュータ又は他のプログラム可能データ処理装置にロードされて、そのコンピュータ又は他のプログラム可能データ処理装置において一連の操作ステップを実行させることも可能であり、これによって、そのコンピュータ又は他のプログラム可能データ処理装置において実行される命令が、1つ以上のフローチャートブロックで指定される機能を実装するステップを与えるように、コンピュータ実装プロセスを生成することが可能である。
【0050】
従って、ブロック図及びフローチャート図の各ブロックは、本明細書に記載の各機能を実行する手段の組み合わせ、本明細書に記載の各機能を実行するステップの組み合わせ、及び本明細書に記載の各機能を実行するプログラム命令手段をサポートしている。又、ブロック図及びフローチャート図の各ブロック、並びに、ブロック図及びフローチャート図におけるブロック同士の組み合わせは、本明細書に記載の各機能又は各ステップを実行する専用ハードウェアベースのコンピュータシステム、又は専用ハードウェアとコンピュータ命令との組み合わせによって実装可能であることも理解されよう。
【0051】
別途明記しない限り、本明細書で説明したいかなる方法も、方法ステップを特定の順番で実施することを要件としていると解釈されるべきではない。従って、方法クレームにおいて実際に、そのステップが辿るべき順序を列挙しているか又は請求項において当該ステップが特定の順序に限定される旨の記述がなされていない限り、順序を示唆するものではない。ステップの構成に関する論理、文法構造又は句読点から導き出される明白な意味合い、本明細書に記載の実施形態の数又はタイプを含めた、考えられるあらゆる非明示的な解釈の根拠についても同じことが言える。
【0052】
本明細書を通じて、様々な公報を参照した。これらの公報の開示内容全体が、参照により本明細書に援用され、これによって、本方法及びシステムが関連する最新技術をより完全に記述している。
【0053】
ここで、本発明のこれらの実施形態に付随した、上記の記述及びこれに関連する図面に示した教示の利益を有する、本発明の多くの改変及びその他の実施形態が、当業者には想到されよう。従って、本発明の実施時形態が、開示された特定の実施形態に限定されることはなく、その改変及びその他の実施形態も、添付の特許請求の範囲に含まれることを意図している。また、上記の説明及び関連する図面では、要素及び/機能の或る例示的な組み合わせのコンテキストにおいて実施形態を記述したが、要素及び/機能の異なる組み合わせも、添付の特許請求の範囲から逸脱することなく、変形形態によって提供可能である。この点において、例えば、以上に明記したものとは異なる要素及び/又は機能の組み合わせも、添付の特許請求の範囲のいずれかに記載のものであることも考えられる。本明細書では、特定の用語を用いたが、これらはあくまでも総称的に説明的な意味で用いられたものであって、限定目的で用いられているのではない。
【符号の説明】
【0054】
102 センサ
104 ターゲット
106 回路
108 第2の回路
110 FPGA又はデジタルプロセッサ
112 アナログデジタル変換器(ADC)
114 回路108の出力
202 抵抗分割器
204 シングルエンデッド出力を有する演算増幅器
302 デジタルポテンショメータ
304 スケーリング演算増幅器回路
501 コンピュータ
502 人間機械インタフェース
503 プロセッサユニット
504 大容量記憶装置
505 オペレーティングシステム
506 デジタルポテンショメータ制御ソフトウェア
507 制御アルゴリズムデータ
508 ネットワークアダプタ
509 ディスプレイアダプタ
510 入出力インタフェース
511 ディスプレイ装置
512 システムメモリ
513 システムバス
514 1つ以上のリモートコンピューティング装置又はクライアント
515 ネットワーク
【特許請求の範囲】
【請求項1】
時間とともに振幅が変化する交流差動電圧信号をセンサ(102)から受信するステップと、
前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換するステップと、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングするステップであって、前記スケーリング係数は、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択されるステップと、
を含む方法。
【請求項2】
前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する前記ステップは、抵抗分割器(202)を用いて前記交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器(204)に差動入力を与えることと、を含む、請求項1に記載の方法。
【請求項3】
前記交流差動電圧信号をセンサ(102)から受信する前記ステップは、前記交流差動電圧信号を可変磁気抵抗センサから受信することを含む、請求項1から2のいずれかに記載の方法。
【請求項4】
前記可変磁気抵抗センサから発生する前記交流差動電圧信号は、ターゲット(104)の材料組成、前記センサ(102)と前記ターゲット(104)との間のギャップ、及び前記ターゲット(104)が前記センサ(102)のそばを通過する際の速度と関連している、請求項3に記載の方法。
【請求項5】
前記ターゲットはタービンブレードである、請求項4に記載の方法。
【請求項6】
時間とともに振幅が変化する交流差動電圧信号を発生させるように構成されたセンサ(102)と、
前記交流差動電圧信号を受信し、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、第1の回路(106)と、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路(108)であって、前記スケーリング係数は、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される、前記第2の回路(108)と、
を備えるシステム。
【請求項7】
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)は、前記スケーリング係数と前記減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように前記スケーリング係数を自動的に設定する、前記第2の回路(108)に関連付けられたフィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサ(110)を含む、請求項6に記載のシステム。
【請求項8】
前記減衰済みシングルエンデッド電圧レベルに前記スケーリング係数を乗じることにより前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)は、前記FPGA又はデジタルプロセッサ(110)によって制御されるデジタルポテンショメータ(302)を有するスケーリング演算増幅器回路(304)を用いて前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)である、請求項7に記載のシステム。
【請求項9】
前記FPGA又はデジタルプロセッサ(110)は、前記減衰済みシングルエンデッド電圧信号のデジタル表現をアナログデジタル変換器(ADC)(112)から受信し、前記スケーリング係数と前記減衰済みシングルエンデッド電圧レベルとの積が前記最大入力信号電圧以下になるように前記デジタルポテンショメータ(302)を自動的に調節することにより、前記減衰済みシングルエンデッド電圧信号をスケーリングする、請求項8に記載のシステム。
【請求項10】
前記第1の回路(106)は、抵抗分割器(202)及びシングルエンデッド出力を有する演算増幅器(204)を備え、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、前記抵抗分割器(202)を用いて前記交流差動電圧信号を分割することと、シングルエンデッド出力を有する前記演算増幅器(204)に差動入力を与えることと、を含む、請求項6に記載のシステム。
【請求項1】
時間とともに振幅が変化する交流差動電圧信号をセンサ(102)から受信するステップと、
前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換するステップと、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングするステップであって、前記スケーリング係数は、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択されるステップと、
を含む方法。
【請求項2】
前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する前記ステップは、抵抗分割器(202)を用いて前記交流差動電圧信号を分割することと、シングルエンデッド出力を有する演算増幅器(204)に差動入力を与えることと、を含む、請求項1に記載の方法。
【請求項3】
前記交流差動電圧信号をセンサ(102)から受信する前記ステップは、前記交流差動電圧信号を可変磁気抵抗センサから受信することを含む、請求項1から2のいずれかに記載の方法。
【請求項4】
前記可変磁気抵抗センサから発生する前記交流差動電圧信号は、ターゲット(104)の材料組成、前記センサ(102)と前記ターゲット(104)との間のギャップ、及び前記ターゲット(104)が前記センサ(102)のそばを通過する際の速度と関連している、請求項3に記載の方法。
【請求項5】
前記ターゲットはタービンブレードである、請求項4に記載の方法。
【請求項6】
時間とともに振幅が変化する交流差動電圧信号を発生させるように構成されたセンサ(102)と、
前記交流差動電圧信号を受信し、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、第1の回路(106)と、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路(108)であって、前記スケーリング係数は、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される、前記第2の回路(108)と、
を備えるシステム。
【請求項7】
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)は、前記スケーリング係数と前記減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように前記スケーリング係数を自動的に設定する、前記第2の回路(108)に関連付けられたフィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサ(110)を含む、請求項6に記載のシステム。
【請求項8】
前記減衰済みシングルエンデッド電圧レベルに前記スケーリング係数を乗じることにより前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)は、前記FPGA又はデジタルプロセッサ(110)によって制御されるデジタルポテンショメータ(302)を有するスケーリング演算増幅器回路(304)を用いて前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)である、請求項7に記載のシステム。
【請求項9】
前記FPGA又はデジタルプロセッサ(110)は、前記減衰済みシングルエンデッド電圧信号のデジタル表現をアナログデジタル変換器(ADC)(112)から受信し、前記スケーリング係数と前記減衰済みシングルエンデッド電圧レベルとの積が前記最大入力信号電圧以下になるように前記デジタルポテンショメータ(302)を自動的に調節することにより、前記減衰済みシングルエンデッド電圧信号をスケーリングする、請求項8に記載のシステム。
【請求項10】
前記第1の回路(106)は、抵抗分割器(202)及びシングルエンデッド出力を有する演算増幅器(204)を備え、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、前記抵抗分割器(202)を用いて前記交流差動電圧信号を分割することと、シングルエンデッド出力を有する前記演算増幅器(204)に差動入力を与えることと、を含む、請求項6に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−211581(P2012−211581A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−33479(P2012−33479)
【出願日】平成24年2月20日(2012.2.20)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−33479(P2012−33479)
【出願日】平成24年2月20日(2012.2.20)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]