
動線連結方法,装置及び動線連結プログラム
【課題】複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結できるようにする。
【解決手段】連結元動線の終点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。連結先動線の始点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。各人物画像との同定処理を行う。そして、同一人物であることが確認されると、連結元動線に連結先動線を連結する。
【解決手段】連結元動線の終点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。連結先動線の始点が検出された時点のカメラ画像データを選択する。そして、この画像データを処理して人物画像を抽出する。各人物画像との同定処理を行う。そして、同一人物であることが確認されると、連結元動線に連結先動線を連結する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば店舗内を移動する買物客の軌跡を示す動線データの連結技術に関する。
【背景技術】
【0002】
スーパーマーケット,コンビニエンスストア等の店舗内を移動する買物客の軌跡を動線として認識する動線認識システムには、カメラを用いた画像処理方式や無線タグリーダを用いた無線タグ追跡方式等がある。画像処理方式の場合、現状の画像処理技術では、各カメラで監視領域の全エリアを死角なく撮影したとしても、一人の買物客の監視領域全域の動きを1つの動線として追跡することはきわめて困難である。例えば、他の買物客とすれ違った際に動線が途切れたり、動線が入れ替わったりする場合が考えられる。
【0003】
例えば特許文献1には、画像処理方式の動線認識システムにより生成された複数の動線データの中から同一客に対する動線データを選択し、それぞれを連結して1本の動線データを生成する動線編集システムが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、動線認識に必要な情報処理はコンピュータを用いて行うが、その情報処理には大きな負荷を要するため、1台のコンピュータに接続可能なカメラや無線タグリーダの台数には限りがある。このため、単一の動線認識システムで動線を認識可能な監視領域の広さには自ずと限界がある。そこで、複数の動線認識システムで認識された動線の中から同一人物に対する動線を連結する技術が求められている。
【0005】
本発明はこのような事情に基づいてなされたもので、その目的とするところは、複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結することができ、広域な領域全体を補っての動線認識を可能ならしめる動線連結方法及び装置並びにプログラムを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の動線連結方法は、第1の動線認識エリア内を移動する移動体、例えば人物毎にその移動体が第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータが、第1の動線データベースに記憶された各動線データの中から、境界近傍を終点とする移動体の動線データを選択し(連結元動線選択段階)と、この選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択し(連結元画像選択段階)、この選択されたカメラ画像データから移動体画像を抽出する(連結元移動体画像抽出段階)。また、コンピュータが、第2の動線データベースに記憶された各動線データの中から、連結元動線選択段階により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択し(連結先動線選択段階)、この選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを第2の画像データベースから選択し(連結先画像選択段階)、この選択されたカメラ画像データから移動体画像を抽出する(連結先移動体画像抽出段階)。そして、コンピュータが、連結元移動体画像抽出段階により抽出された移動体画像と連結先移動体画像抽出段階により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定し、移動体が同一であると判定されると、連結元動線選択段階により選択された動線データに連結先動線選択段階により選択された動線データを連結することで、第1の動線データベースに記憶された各移動体の動線データと第2の動線データベースに記憶された各移動体の動線データとのなかから、同一移動体の動線データどうしを連結するようにしたものである。
【0007】
本発明の動線認識装置は、前記第1,第2の動線データベース及び第1,第2の画像データベースにアクセス可能で、第1の動線データベースに記憶された各動線データの中から、第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を終点とする移動体の動線データを選択する連結元動線選択手段と、この連結元動線選択手段により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択する連結元画像選択手段と、この連結元画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出手段と、第2の動線データベースに記憶された各動線データの中から、連結元動線選択手段により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択手段と、この連結先動線選択手段により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを第2の画像データベースから選択する連結先画像選択手段と、この連結先画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出手段と、連結元移動体画像抽出手段により抽出された移動体画像と連結先移動体画像抽出手段により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定手段と、この移動体同定手段により移動体が同一であると判定されると、連結元動線選択手段により選択された動線データに連結先動線選択手段により選択された動線データを連結する動線連結手段とを備えたものである。
【0008】
本発明の動線認識プロクラムは、前記第1,第2の動線データベース及び第1,第2の画像データベースにアクセス可能なコンピュータに、第1の動線データベースに記憶された各動線データの中から、第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を終点とする移動体の動線データを選択させる連結元動線選択機能と、の連結元動線選択機能により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択させる連結元画像選択機能と、この連結元画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結元移動体画像抽出機能と、第2の動線データベースに記憶された各動線データの中から、連結元動線選択機能により選択された動線データの終点が検出された時点の前後に境界近傍を始点として追跡された移動体の動線データを選択させる連結先動線選択機能と、この連結先動線選択機能により選択された動線データの始点が検出された時点の境界近傍を撮影したカメラ画像データを第2の画像データベースから選択させる連結先画像選択機能と、この連結先画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結先移動体画像抽出機能と、連結元移動体画像抽出機能により抽出された移動体画像と連結先移動体画像抽出機能により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定させる移動体同定機能と、この移動体同定機能により移動体が同一であると判定されると、連結元動線選択機能により選択された動線データに連結先動線選択機能により選択された動線データを連結させる動線連結機能とを実現させるためのものである。
【発明の効果】
【0009】
かかる手段を講じた本発明によれば、複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを連結することができ、広域な領域全体を補っての動線認識を可能ならしめる効果を奏する。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態である動線連結装置の要部構成を示すブロック図。
【図2】同実施形態が適用される店舗の説明図。
【図3】同実施形態における動線認識システムの概略構成図。
【図4】同実施形態において、画像データベースに記憶される画像データの構造を示す模式図。
【図5】同実施形態において、動線データベースに記憶される動線データの構造を示す模式図。
【図6】同実施形態における動線認識システムのカメラレイアウトの一例を示す模式図。
【図7】同実施形態において、動線連結装置が有する設定テーブルの一データ例を示す模式図。
【図8】同実施形態において、動線連結プログラムが起動したときの動線連結装置の制御部が実行する主要な処理手順を示す流れ図。
【図9】図8における連結元動線検出処理の具体的処理手順を示す流れ図。
【図10】図8における連結先動線選択処理の具体的処理手順を示す流れ図。
【図11】図8における連結実行処理の具体的処理手順を示す流れ図。
【発明を実施するための形態】
【0011】
以下、本発明を実施形態について、図面を用いて説明する。
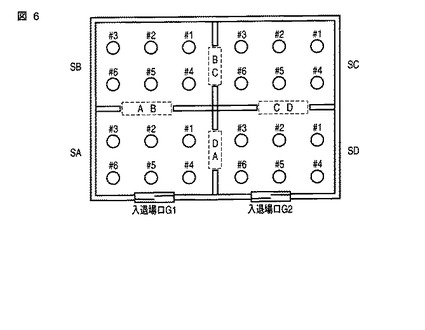
なお、この実施形態は、図2に示すように、互いに隣接して客が行き来できる4つの売場A,売場B,売場C及び売場Dを備えた店舗1に適用した場合である。
【0012】
図2に示すように、売場Aは、売場B及び売場Dと隣接し、売場Bは、売場A及び売場Cと隣接し、売場Cは、売場B及び売場Dと隣接し、売場Dは、売場C及び売場Aと隣接している。そして、隣接する各売場間には、それぞれ客が行き来できるように通路が形成されている。また、売場Aと売場Dとには、客が入退場可能な入退場口G1,G2が設けられている。
【0013】
各売場A〜Dには、それぞれその売場内を移動する移動体である人物(買物客)の軌跡を動線として認識するための動線認識システムSA,SB,SC,SDが構築されている。すなわち、売場Aは動線認識システムSAの動線認識エリアとなっており、売場Bは動線認識システムSBの動線認識エリアとなっており、売場Cは動線認識システムSCの動線認識エリアとなっており、売場Dは動線認識システムSDの動線認識エリアとなっている。
【0014】
本実施形態では、各動線認識システムSA,SB,SC,SDとして、いずれもカメラを用いた画像処理方式を採用する。画像処理方式の動線認識システムは、図3に示すように、複数基のカメラ2と、コンピュータを主体とした動線認識装置3とを備える。
【0015】
各カメラ2は、魚眼レンズを用いたカメラや全方位ミラー付のカメラ等の広角レンズカメラである。これらのカメラ2は、視体積交差法により、それぞれ対応する売場A,B,C,D内を移動する買物客の軌跡、すなわち人物動線を追跡するために用いられる。視体積交差法は、例えば客の頭部を複数の方向から撮影し、各画像の頭部の位置から頭部の店内空間に適宜設置された3次元座標系内の座標値を算出する方法である。1つの監視領域に配置されるカメラの台数は特に制限されないが、視体積交差法による位置検出精度を高めるためには少なくとも3台は必要である。
【0016】
各カメラ2は、動線認識装置3が備えるカメラコントロール部31の一元制御により一定の周期(例えば1/15秒)で撮影動作を繰り返し、その撮影画像(フレーム画像)を動線認識装置3に送信する。動線認識装置3は、カメラコントロール部31の他、カメラ画像データベース32、動線生成部33及び動線データベース34を備えている。
【0017】
カメラ画像データベース32は、各カメラ2で撮影されたフレーム画像データを順次蓄積する。カメラ画像データベース32に蓄積されるフレーム画像データの構造を、図4の模式図で示す。図4に示すように、フレーム画像データは、カメラID、フレーム番号及び撮影時刻が関連付けられて、カメラ画像データベース32に記憶される。カメラIDは、当該画像データを撮影したカメラ2の識別コードである。各カメラ2には、それぞれ固有のカメラIDが予め設定されている。フレーム番号は、各カメラ2でフレーム画像が撮影される毎にカウントアップされる“1”からの連続番号である。カメラコントロール部31の制御により、各カメラ2のフレーム番号は同期している。撮影日時は、当該画像データが撮影された時点の日時(年月日時分秒)である。
【0018】
動線生成部33は、カメラ画像データベース32に蓄積されたフレーム画像データの画像処理により動線認識エリア(売場)内を移動する買物客を認識し、この買物客が動線認識エリアに進入した地点である始点から退出した地点である終点までの動線認識エリア内での軌跡を示す動線データを作成する。動線生成部33は、例えば前記1に記載された技術により、複数に途切れた同一買物客の動線を1本の動線に連結する機能を有している。
【0019】
動線データベース34は、動線生成部33により買物客毎に生成される動線データを順次蓄積する。動線データベース34に蓄積される動線データの構造を、図5の模式図で示す。図5に示すように、動線データは、動線IDが関連付けられて、動線データベース34に記憶される。動線IDは、当該動線データを個々に特定するための動線特定情報である。動線生成部33は、買物客1名の動線データを生成する毎に、その動線データに固有の動線IDを付して、動線データベース34に格納する。
【0020】
動線データは、始点フレーム“1”のフレーム番号、及び終点フレーム“n”(n>1の整数)のフレーム番号と、始点フレーム“1”から終点フレーム“n”までのフレーム毎のインデックスデータとから構成されている。インデックスデータは、少なくとも店内の三次元座標(X,Y,H)とフレーム撮影時刻Tとを含む。始点フレーム“1”番号は、当該動線データの買物客が最初に認識されたフレーム画像のフレーム番号であり、このフレーム画像の撮影時刻が始点フレーム“1”に対するインデックスデータのフレーム撮影時刻Tとなる。終点フレーム”n”番号は、当該買物客が最後に認識されたフレーム画像のフレーム番号であり、このフレーム画像の撮影時刻が終点フレーム“n”に対するインデックスデータのフレーム撮影時刻Tとなる。フレーム番号毎の店内座標は、対応するフレーム番号のフレーム画像から認識された当該顧客の位置を、三次元の世界座標系(X,Y,H)で特定したものである。本実施形態では、図2において、左下の角をX軸及びY軸の原点O(0,0)とし、その床面をH(Height)軸の原点としている。
【0021】
図3の動線認識システムは、売場A,B,C,D毎に構築される。各動線認識システムのカメラ2は、それぞれ対応する売場A,B,C,Dの天井部等に分散して取り付けられる。本実施形態では、説明の便宜上、図6の#1〜#6に示すレイアウトで、カメラ2が売場A,B,C,D毎に各6基ずつ取り付けられているものとする。
【0022】
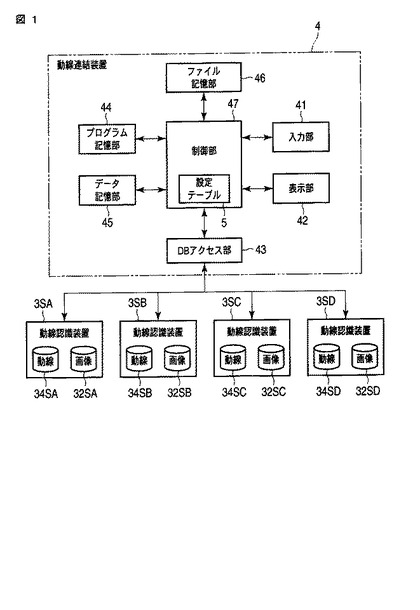
図1は、本発明に係わる動線連結装置4の要部構成を示すブロック図である。動線連結装置4は、入力部41、表示部42、データベースアクセス部43、プログラム記憶部44、データ記憶部45、ファイル記憶部46及び制御部47を備えている。入力部41は、キーボード,マウス等の入力デバイスからなる。表示部42は、液晶ディスプレイ,CRTディスプレイ等の表示デバイスからなる。タッチパネル付のディスプレイを用いることで、入力部と表示部を兼用してもよい。
【0023】
データベースアクセス部43は、各動線認識システムSA,SB,SC,SDの動線認識装置3(3SA,3SB,3SC,3SD)がそれぞれ有する動線データベース34SA,34SB,34SC,34SDとカメラ画像データベース32SA,32SB,32SC,32SDにアクセスし、動線データやフレーム画像データを読取ったり書き込んだりできる。
【0024】
プログラム記憶部44は、ROM(Read Only Memory)で構成されている。データ記憶部45は、RAM(Random Access Memory)で構成されている。ファイル記憶部46は、ハードディスクや光磁気ディスク等の記録媒体で構成されている。制御部47は、CPU(Central Processing Unit)を主体に構成されている。かかる構成の動線連結装置4は、パーソナルコンピュータ等のコンピュータ機器によって実現される。
【0025】
プログラム記憶部44には、コンピュータに、ある売場(動線認識エリア)の動線認識システムによって認識された動線データと、当該売場に隣接する他の売場の動線認識システムによって認識された動線データとの中から、売場間を行き来した同一買物客の動線データを選択させて連結させるプログラム、いわゆる動線連結プログラムが実装されている。制御部47は、上記動線連結プログラムに従い、動線データの連結を行う。
【0026】
以下、動線データの連結手順について、具体的に説明する。はじめに、各動線認識システムSA,SB,SC,SDの動線データベース34SA,34SB,34SC,34SDに記憶される動線データについて説明する。
【0027】
動線認識システムSAに対応した動線認識装置3SAの動線データベース34SAには、買物客が売場Aに進入した地点である始点から退出した地点である終点までの売場A内での軌跡を示す動線データが蓄積される。買物客は、入退場口G1または売場A,B間の通路AB若しくは売場D,A間の通路DAから売場Aに進入及び退出できる。したがって、動線データベース34SAに蓄積される動線データは、次の9種類である。
【0028】
1.入退場口G1から入店し、売場Aだけを回って入退場口G1から退店した買物客のデータ。
2.入退場口G1から入店し、通路ABを通って売場Bに移動した買物客のデータ。
3.入退場口G1から入店し、通路DAを通って売場Dに移動した買物客のデータ。
4.売場Bより通路ABを通って売場Aに入り、再び通路ABを通って売場Bに戻った買物客のデータ。
5.売場Bより通路ABを通って売場Aに入り、さらに通路DAを通って売場Dに移動した買物客のデータ。
6.売場Bより通路ABを通って売場Aに入り、入退場口G1から退店した買物客のデータ。
7.売場Dより通路DAを通って売場Aに入り、再び通路DAを通って売場Dに戻った買物客のデータ。
8.売場Dより通路DAを通って売場Aに入り、さらに通路ABを通って売場Bに移動した買物客のデータ。
9.売場Dより通路DAを通って売場Aに入り、入退場口G1から退店した買物客のデータ。
【0029】
動線認識システム2Bに対応した動線認識装置3SBの動線データベース34SBには、買物客が売場Bに進入した地点である始点から退出した地点である終点までの売場B内での軌跡を示す動線データが蓄積される。買物客は、通路ABまたは通路BCから売場Bに進入及び退出できる。したがって、動線データベース34SBに蓄積される動線データは、次の4種類である。
【0030】
1.売場Aより通路ABを通って売場Bに入り、再び通路ABを通って売場Aに戻った買物客のデータ。
2.売場Aより通路ABを通って売場Bに入り、さらに通路BCを通って売場Cに移動した買物客のデータ。
3.売場Cより通路BCを通って売場Bに入り、再び通路BCを通って売場Cに戻った買物客のデータ。
4.売場Cより通路BCを通って売場Bに入り、さらに通路ABを通って売場Aに移動した買物客のデータ。
【0031】
動線認識システム2Cに対応した動線認識装置3SCの動線データベース34SCには、買物客が売場Cに進入した地点である始点から退出した地点である終点までの売場C内での軌跡を示す動線データが蓄積される。買物客は、通路BCまたは通路CDから売場Cに進入及び退出できる。したがって、動線データベース34SCに蓄積される動線データは、次の4種類である。
【0032】
1.売場Bより通路BCを通って売場Cに入り、再び通路BCを通って売場Bに戻った買物客のデータ。
2.売場Bより通路BCを通って売場Cに入り、さらに通路CDを通って売場Dに移動した買物客のデータ。
3.売場Dより通路CDを通って売場Cに入り、再び通路CDを通って売場Dに戻った買物客のデータ。
4.売場Dより通路CDを通って売場Cに入り、さらに通路BCを通って売場Bに移動した買物客のデータ。
【0033】
動線認識システム2Dに対応した動線認識装置3SDの動線データベース34SDには、買物客が売場Dに進入した地点である始点から退出した地点である終点までの売場D内での軌跡を示す動線データが蓄積される。買物客は、入退場口G2または通路CD若しくは通路DAから売場Dに進入及び退出できる。したがって、動線データベース34SDに蓄積される動線データは、次の9種類である。
【0034】
1.入退場口G2から入店し、売場Dだけを回って入退場口G2から退店した買物客のデータ。
2.入退場口G2から入店し、通路DAを通って売場Aに移動した買物客のデータ。
3.入退場口G2から入店し、通路CDを通って売場Cに移動した買物客のデータ。
4.売場Aより通路DAを通って売場Dに入り、再び通路DAを通って売場Aに戻った買物客のデータ。
5.売場Aより通路DAを通って売場Dに入り、さらに通路CDを通って売場Cに移動した買物客のデータ。
6.売場Aより通路DAを通って売場Dに入り、入退場口G2から退店した買物客のデータ。
7.売場Cより通路CDを通って売場Dに入り、再び通路CDを通って売場Cに戻った買物客のデータ。
8.売場Cより通路CDを通って売場Dに入り、さらに通路DAを通って売場Aに移動した買物客のデータ。
9.売場Cより通路CDを通って売場Dに入り、入退場口G2から退店した買物客のデータ。
【0035】
ここで、売場Aとこの売場Aに隣接する売場Bとを考えると、その間の境界領域である通路ABを終点とする一方の動線認識システムによる動線データと、同通路ABを始点とする他方の動線認識システムによる動線データとを連結すればよい。すなわち、動線データベース34SAの2番目、4番目及び8番目のデータを連結元動線データとしたとき、動線データベース34SBの1番目と2番目のデータが連結先動線データの候補となる。逆に、動線データベース34SBの1番目と4番目のデータを連結元動線データとしたとき、動線データベース34SAの4番目,5番目及び6番目のデータが連結先動線データの候補となる。
【0036】
他の境界領域である通路BC,通路CD及び通路DAについても同様である。すなわち、動線データベース34SBの2番目及び3番目のデータを連結元動線としたとき、動線データベース34SCの1番目と2番目のデータが連結先動線の候補となり、動線データベース34SCの1番目と4番目のデータを連結元動線としたとき、動線データベース34SBの3番目と4番目のデータが連結先動線の候補となる。また、動線データベース34SCの2番目及び3番目のデータを連結元動線としたとき、動線データベース34SDの7番目、8番目及び9番目のデータが連結先動線の候補となり、動線データベース34SDの3番目、5番目及び7番目のデータを連結元動線としたとき、動線データベース34SCの3番目と4番目のデータが連結先動線の候補となる。また、動線データベース34SDの2番目、4番目及び8番目のデータを連結元動線としたとき、動線データベース34SAの7番目、8番目及び9番目のデータが連結先動線の候補となり、動線データベース34SAの3番目、5番目及び7番目のデータを連結元動線としたとき、動線データベース34SAの7番目、8番目及び9番目のデータが連結先動線の候補となる。
【0037】
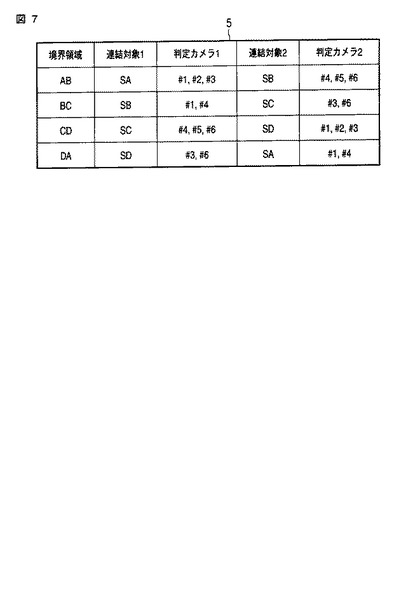
さて、本実施形態では、連結元動線に連結先動線を連結するに際し、その可否判定に、境界領域である通路AB,通路BC,通路CD及び通路DAの近傍を撮影したカメラ画像を使用する。これを実現するために、動線連結装置4は、図7に示すデータ構造の設定テーブル5を備えている。設定テーブル5は、制御部47が内蔵するメモリに記憶されていてもよいし、データ記憶部45に記憶されていてもよい。図7の設定テーブル5は、図6に示したカメラレイアウトに対応している。
【0038】
図6の場合、売場Aと売場Bとを結ぶ通路ABを撮影可能なカメラ2は、売場A側の動線認識システムSAでは#1,#2,#3の3台であり、売場B側の動線認識システムSBでは#4,#5,#6の3台である。売場Bと売場Cとを結ぶ通路BCを撮影可能なカメラ2は、売場B側の動線認識システムSBでは#1,#4の2台であり、売場C側の動線認識システムSCでは#3,#6の2台である。売場Cと売場Dとを結ぶ通路CDを撮影可能なカメラ2は、売場C側の動線認識システムSCでは#4,#5,#6の3台であり、売場D側の動線認識システムSDでは#1,#2,#3の3台である。売場Dと売場Aとを結ぶ通路DAを撮影可能なカメラ2は、売場D側の動線認識システムSDでは#3,#6の2台であり、売場A側の動線認識システムSAでは#1,#4の2台である。
【0039】
設定テーブル5には、境界領域である通路を特定する情報(項目「境界領域」)に対応して、連結対象となる一方の動線認識システムの識別情報(項目「連結対象1」)、及びその動線認識システムにおいて連結可否判定に使用される画像を撮影するカメラの特定情報(項目「判定カメラ1」)と、連結対象となる他方の動線認識システムの識別情報(項目「連結対象2」)、及びその動線認識システムにおいて連結可否判定に使用される画像を撮影するカメラの特定情報(項目「判定カメラ2」)とが設定されている。
【0040】
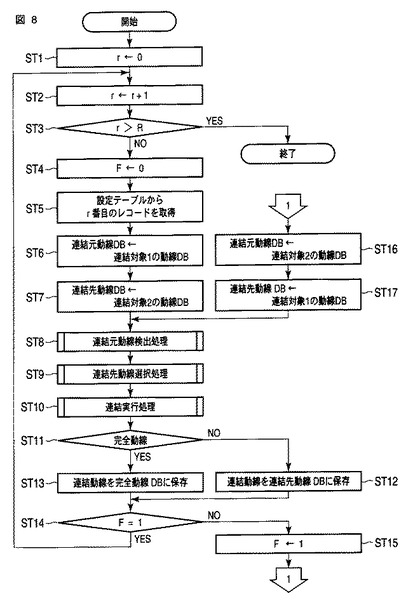
例えば入力部41の操作入力により、動線連結業務の開始が指令されると、動線連結プログラムが起動する。これにより、制御部47は、図8の流れ図に示す手順で各部を制御する。
【0041】
先ず、ST(ステップ)1としてレコードカウンタrを“0”に初期化する。次いで、ST2として上記レコードカウンタrを“1”だけカウントアップする。そして、ST3としてこのレコードカウンタrが設定テーブル5のレコード数R(本実施形態では4)を超えたか否かを判断する。
【0042】
この時点では、未だ超えていないので、制御部47は、ST4として制御フラグFを“0”にリセットする。なお、レコードカウンタr及び制御フラグFは、データ記憶部45に記憶されている。
【0043】
次に、制御部47は、ST5として設定テーブル5からレコード番号rのレコード(「境界領域」、「連結対象1」、「判定カメラ1」、「連結対象2」、「判定カメラ2」)を取得する。そして、ST6としてレコード番号rの設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの動線データベースを連結元動線データベースとして設定する。また、ST7として、レコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの動線データベースを連結先動線データベースとして設定する。
【0044】
次に、制御部47は、ST8として連結元動線データベースから連結元動線を検出する処理、いわゆる連結元動線検出処理を実行し、続いて、ST9として連結先動線データベースから連結先動線を選択する処理、いわゆる連結先動線選択処理を実行する。しかる後、ST10として連結元動線に連結先動線を連結する連結実行処理を実行する。なお、これら連結元動線検出処理、連結先動線選択処理及び連結実行処理については後述する。
【0045】
これらの処理が終了すると、制御部47は、ST11として連結後の動線データが完全動線であるか否かを判断する。本実施形態では、始点と終点とがいずれも入退場口G1またはG2にある動線データを完全動線と称する。連結後の動線データが完全動線でない場合(ST11のNO)、制御部47は、ST12として連結後の動線データを連結先動線データベースに上書き保存する。これに対し、連結後の動線データが完全動線である場合は(ST11のYES)、制御部47は、ST13として連結後の動線データを完全動線データベースに新規保存する。完全動線データベースは、ファイル記憶部46に形成されている。
【0046】
連結後の動線データを連結先動線データベースまたは完全動線データベースに保存したならば、制御部47は、ST14として制御フラグFをチェックする。この時点では、制御フラグFは“0”にリセットされているので、制御部47は、ST15として制御フラグFを”1”にセットする。そして、ST16として、今度はレコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの動線データベースを連結元動線データベースとして設定する。また、ST17として、同設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの動線データベースを連結先動線データベースとして設定する。そして、制御部47は、再びST8〜ST10の連結元動線検出処理、連結先動線選択処理及び連結実行処理を実行する。その結果、連結後の動線データが完全動線でなければ(ST11のNO)、連結先動線データベースに上書き保存し(ST12)、完全動線であれば(ST11のYES)、完全動線データベースに新規保存する(ST13)。なお、連結後動線データを連結先動線データベースに上書き保存するのでなく、新規保存し、連結先動線データベースから連結前の連結先動線データを削除してもよい。
【0047】
こうして、連結後の動線データを連結先動線データベースまたは完全動線データベースに保存したならば、制御部47は、再び制御フラグFをチェックする(ST14)。この時点では、制御フラグFは“1”にセットされているので、制御部47は、ST2の処理に戻る。以後、制御部47は、レコードカウンタrがレコード数Rを越えるまで、ST4〜ST17の処理を繰返し実行する。レコードカウンタrがレコード数Rを越えたならば(ST3のYES)、設定テーブル5に設定されている全てのレコードについて処理されたので、動線連結プログラムが終了する。
【0048】
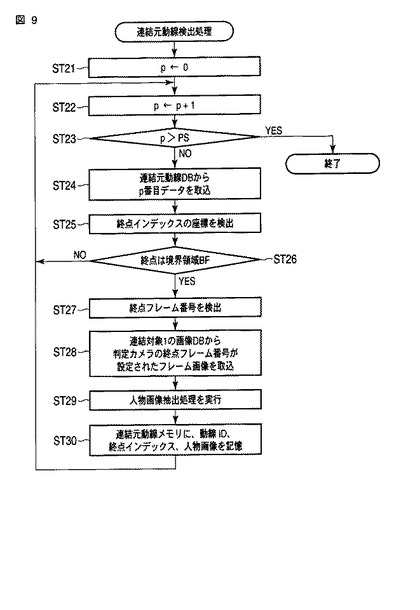
図9は連結元動線検出処理の具体的な処理手順を示す流れ図である。前記ST8にて連結元動線検出処理が開始されると、制御部47は、先ず、ST21として第1ポインタpを一旦“0”にリセットする。次いで、ST22として上記第1ポインタpを“1”だけ増加する。そして、ST23としてこの第1ポインタpが、前記ST6またはST16の処理で設定された連結元動線データベースの動線データ数PSを超えたか否かを判断する。
【0049】
第1ポインタpが連結元動線データベースの動線データ数PSを超えていない場合(ST23のNO)、制御部47は、ST24として連結元動線データベースからp番目の動線データを取り込む。そして、ST25としてこのp番目動線データの終点を示すフレームnインデックス情報から二次元座標(Xn,Yn)を検出する。そして、ST26としてこの二次元座標(Xn,Yn)の地点が、所定の境界領域BF内に位置するか否かを判断する。
【0050】
ここで、所定の境界領域BFとは、レコード番号rの設定テーブルレコードの項目「境界領域」の識別情報で特定される通路の領域(図6中、波線で囲われた通路AB,BC,CD,DAの各矩形領域)である。制御部47は、通路AB,BC,CD及びDAの境界領域毎に、その左上角の二次元座標と右下角の二次元座標とを示すデータを予め記憶している。ST26の処理にて二次元座標(Xn,Yn)を取得すると、この座標が、該当する境界領域BFの左上角と右下角の各座標を結ぶ矩形の領域内に存在するか否かを判別する。存在する場合には、当該動線データの終点が該当する境界領域BF内に位置すると決定する。
【0051】
当該動線データの終点が境界領域BF内に位置していない場合(ST26のNO)、制御部47は、ST22の処理に戻る。これに対し、当該動線データの終点が境界領域BF内に位置している場合には(ST26のYES)、制御部47は、当該動線データを連結元動線として選択する(連結元動線選択手段)。
【0052】
制御部47は、p番目動線データを連結元動線データとして選択すると、ST27として、このp番目動線データの終点フレームn番号を検出する。次いで、ST28としてレコード番号rの設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの画像データベースを検索する。そして、同設定テーブルレコードの[判定カメラ1]に設定されている識別情報で特定されるカメラ2の画像データの中から、終点フレームn番号が設定されたフレーム画像を取り込む(連結元画像選択手段)。
【0053】
次に、制御部47は、ST29として終点フレームn番号のフレーム画像データを解析して、これらの画像データから人物画像を抽出する(連結元移動体画像抽出手段)。そして、人物画像を抽出できたならば、制御部47は、ST30としてp番目動線データの動線ID、及び、終点を示すフレームnインデックス情報と、抽出された人物画像のデータとを関連付けた1レコードを生成し、データ記憶部45上の連結元動線メモリに記憶させる。しかる後、制御部47は、ST22の処理に戻る。
【0054】
以後、制御部47は、第1ポインタpを増加する毎に、ST24〜ST30の処理を繰返し実行する。そして、第1ポインタpが連結元動線データベースの動線データ数PSを超えたならば、この連結元動線検出処理を終了する。
【0055】
図10は連結先動線検出処理の具体的な処理手順を示す流れ図である。前記ST9にて連結先動線検出処理が開始されると、制御部47は、先ず、ST41として第1ポインタpを一旦“0”にリセットする。次いで、ST42として上記第1ポインタpを“1”だけ増加する。そして、ST43としてこの第1ポインタpが、前記ST7またはST17の処理で設定された連結先動線データベースのレコード数PFを超えたか否かを判断する。
【0056】
第1ポインタpが連結先動線データベースの動線データ数PFを超えていない場合(ST43のNO)、制御部47は、ST44として連結先動線データベースからp番目の動線データを取り込む。そして、ST45としてこのp番目動線データの始点を示すフレーム1インデックス情報から二次元座標(X1,Y1)を検出する。そして、ST46としてこの二次元座標(X1,Y1)の地点が、所定の境界領域BF内か否かを判断する。
【0057】
この判断処理は、前記連結元動線検出処理のST26の処理と同様である。p番目当該動線データの始点が境界領域BF内に位置していない場合(ST46のNO)、制御部47は、ST42の処理に戻る。これに対し、当該動線データの始点が境界領域BF内に位置している場合には(ST46のYES)、制御部47は、当該動線データを連結先動線として選択する(連結先動線選択手段)。
【0058】
制御部47は、p番目動線データを連結先動線データとして選択すると、ST47として、このp番目動線データの始点フレーム1番号を検出する。次いで、ST48としてレコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの画像データベースを検索する。そして、同設定テーブルレコードの[判定カメラ2]に設定されている識別情報で特定されるカメラ2の画像データの中から、始点フレーム1番号が設定されたフレーム画像を取り込む(連結先画像選択手段)。
【0059】
次に、制御部47は、ST49として始点フレーム1番号のフレーム画像データを解析して、これらの画像データから人物画像を抽出する(連結先移動体画像抽出手段)。そして、人物画像を抽出できたならば、制御部47は、ST50としてp番目動線データの動線ID、及び、始点を示すフレーム1インデックス情報と、抽出した人物画像のデータとを関連付けた1レコードを生成し、データ記憶部45上の連結先動線メモリに記憶させる。しかる後、制御部47は、ST42の処理に戻る。
【0060】
以後、制御部47は、第1ポインタpを増加する毎に、ST44〜ST50の処理を繰返し実行する。そして、第1ポインタpが連結先動線データベースの動線データ数PFを超えたならば、この連結先動線検出処理を終了する。
【0061】
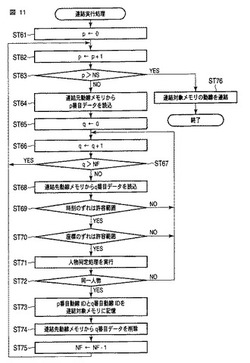
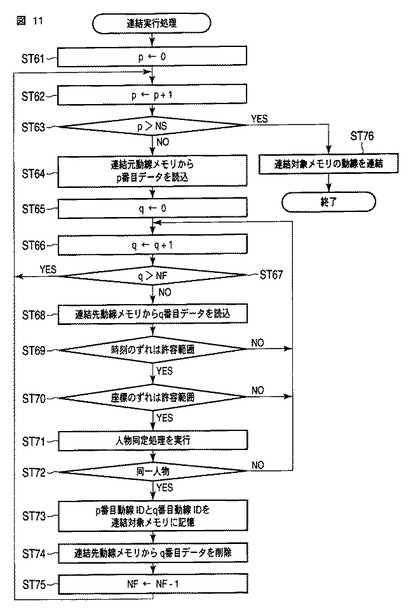
図11は連結実行処理の具体的な処理手順を示す流れ図である。前記ST10にて連結実行処理が開始されると、制御部47は、先ず、ST61として第1ポインタpを一旦“0”にリセットする。次いで、ST62として上記第1ポインタpを“1”だけ増加する。そして、ST63としてこの第1ポインタpが連結元動線メモリのレコード数NSを超えたか否かを判断する。
【0062】
第1ポインタpが連結元動線メモリのレコード数NSを超えていない場合(ST63のNO)、制御部47は、ST64として連結元動線メモリからp番目のレコードデータを読み込む。
【0063】
次に、制御部47は、ST65として第2ポインタqを一旦“0”にリセットする。次いで、ST66として上記第2ポインタqを“1”だけ増加する。そして、ST67としてこの第2ポインタqが連結先動線メモリのレコード数NFを超えたか否かを判断する。
【0064】
第2ポインタqが連結先動線メモリのレコード数NFを超えていない場合(ST67のNO)、制御部47は、ST68として連結先動線メモリからq番目のレコードデータを読み込む。
【0065】
次に、制御部47は、ST69として連結元動線メモリから読込んだp番目レコードデータに含まれる終点フレームnインデックス情報の時刻Tnと、連結先動線メモリから読込んだq番目レコードデータに含まれる始点フレーム1インデックス情報の時刻T1とを比較し、時間差ΔT=|Tn−T1|を算出する。そして、この時間差ΔTが予め設定された許容範囲内か否かを判断する。時間差ΔTが許容範囲を超える場合(ST69のNO)、制御部47は、ST66の処理に戻る。
【0066】
時間差ΔTが許容範囲であった場合には(ST69のYES)、制御部47は、ST70として同終点フレームnインデックス情報の三次元座標(Xn,Yn,Hn)が示す地点から同始点フレーム1インデックス情報の三次元座標(X1,Y1,H1)が示す地点までの距離ΔLを算出する。そして、この距離ΔLが予め設定された許容範囲内か否かを判断する。距離ΔLが許容範囲を超える場合(ST70のNO)、制御部47は、ST66の処理に戻る。
【0067】
時間差ΔTに続いて距離ΔLが許容範囲であった場合には(ST70のYES)、制御部47は、ST71として連結元動線メモリのp番目レコードデータに含まれる人物画像データと連結先動線メモリのq番目レコードデータに含まれる人物画像データとから、両人物画像データで特定される人物が同一人物であるか否かを判定するための人物同定処理を実行する(移動体同定手段)。
【0068】
この人物同定処理の結果、同一人物でないと判定された場合には(ST72のNO)、制御部47は、ST66の処理に戻る。これに対し、同一人物であると判定された場合には(ST72のYES)、制御部47は、ST73として連結元動線メモリのp番目レコードデータに含まれる動線IDと、連結先動線メモリのq番目レコードデータに含まれる動線IDとを関連付けた1レコードを生成し、データ記憶部45上の連結対象メモリに記憶させる。
【0069】
しかる後、制御部47は、ST74として連結先動線メモリからq番目レコードデータを削除する。また、ST75として連結先動線メモリのレコード数NFを“1”だけ減算する。その後、制御部47は、ST62の処理に戻る。
【0070】
このように、連結元動線メモリのp番目レコードデータに対しては、その終点フレームnインデックス情報の時刻Tnに対する始点フレーム1インデックス情報の時刻T1の時間差ΔTが許容範囲内で、かつ、その終点座標(Xn,Yn,Hn)から始点座標(X1,Y1,H1)までの距離ΔLが許容範囲内のq番目レコードデータが、連結先動線の候補として選択される。
【0071】
制御部47は、連結先動線の候補となるq番目動線データを連結先動線メモリから取得できるまで、ST66〜ST70の処理を繰返し実行する。そして、連結先動線の候補となるq番目動線データを取得できたならば、制御部47は、前記人物同定処理を行う。その結果、同一人物でないと判定されたならば、再び、ST66〜ST70の処理を繰返し実行する。
【0072】
これに対し、同一人物であると判定されたならば、q番目動線データを連結先動線として決定する。そして、連結元動線であるp番目動線データの動線IDと、連結先動線であるq番目動線データの動線IDとを、連結対象メモリに記憶させる。このとき、連結先動線メモリからq番目動線データを削除する。そして、これに伴い、連結先動線メモリのデータ数NFを“1”だけ減算する。その後、制御部47は、ST62の処理に戻る。なお、連結先動線メモリに記憶されたレコードデータの全てをチェックしたが、連結先動線となり得るq番目レコードデータを検出できかった場合も、制御部47は、ST62の処理に戻る。
【0073】
以後、制御部47は、第1ポインタpをさらに“1”だけ増加して、ST64〜ST75の処理を再度実行する。そして、第1ポインタpが連結元動線メモリのレコード数NSを超えたならば、制御部47は、ST76の処理に進む。
【0074】
ST76では、連結対象メモリに記憶されたp番目レコードデータの動線IDによって特定される動線データを連結元動線とし、このp番目動線IDに対応するq番目レコードデータの動線IDによって特定される動線データを連結先動線として、両動線データを連結する。
【0075】
具体的には、制御部47は、先ず、連結元動線の終点座標(Xn,Yn,Hn)と、連結先動線の始点座標(X1,Y1,H1)とを比較する。そして、両座標が一致しない場合、制御部47は、終点座標(Xn,Yn,Hn)に対する始点座標(X1,Y1,H1)のずれを座標誤差として算出する。すなわち、X座標に対する誤差ΔXを“Xn−X1”で算出し、Y座標に対する誤差ΔYを“Yn−Y1”で算出し、Z座標に対する誤差ΔZを“Hn−H1”で算出する。そして、連結先動線の始点座標及び終点座標と各インデックス情報の座標に、それぞれ上記座標誤差ΔX,ΔY,ΔZを加算して、連結先動線の始点座標が連結元動線の終点座標と一致するように補正する(動線補正手段)。
【0076】
また、制御部47は、連結元動線の終点フレームnインデックス情報の時刻Tnと、連結先動線の始点フレーム1インデックス情報の時刻T1とを比較する。そして、両時刻が一致しない場合、制御部47は、時刻Tnに対する時刻T1のずれを時間誤差ΔT(=Tn−T1)として算出する。そして、連結先動線の各インデックス情報に含まれる時刻にそれぞれ上記時間誤差ΔTを加算して、連結先動線の始点座標が検出された時刻が連結元動線の終点座標が検出された時刻と一致するように補正する(動線補正手段)。
【0077】
しかる後、制御部47は、連結元動線に連結先動線を連結する。すなわち、連結元動線の終点座標を連結先動線の終点座標に置換する。また、連結元動線の最終インデックス情報(Xn,Yn,Tn)の後に、連結先動線のフレーム2インデックス情報(X2,Y2,T2)から後の全てのインデックス情報を追加する。こうすることにより、連結元動線のデータは、p番目動線データにq番目動線データを連結したデータとなる(動線連結手段)。
【0078】
制御部47は、連結対象メモリに記憶した全てのデータについて、ST76の動線連結処理を実行する。そして、実行完了後、この連結実行処理を終了する。
【0079】
ここで、図9のST29及び図10のST49において、カメラ画像データからゆがみのない人物画像を抽出する技術は、例えば2や3などに開示されている周知の技術を利用する。同様に、図11のST71において、抽出した2つの人物画像を対比(パターン認識、色ヒストグラム間の類似度等)して同一人物であるか否かを判定する人物同定処理の技術は、例えば4や前記3などに開示されている周知の技術を利用する。
【0080】
このように構成された本実施形態において、今、設定テーブル5のデータが図7の通りであったとする。この場合、先ず、売場Aから売場Bに移動した買物客の動線データが以下の手順で連結される。
【0081】
手順1.動線認識システムSAの動線データベース34SAから終点座標が通路領域AB内の動線データを連結元動線として選択する。
手順2.動線認識システムSAの画像データベース32SAから、識別情報#1,#2及び#3で特定されるカメラ2の画像データのうち、連結元動線の終点フレームn番号と一致するフレーム画像データを取り込む。
手順3.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順4.連結元動線の動線ID及び終点フレームnインデックス情報と、人物画像データとを連結元動線メモリに記憶する。
手順5.動線認識システムSBの動線データベース34SBから始点座標が通路領域AB内の動線データを連結先動線として選択する。
手順6.動線認識システムSBの画像データベース32SBから、識別情報#4,#5及び#6で特定されるカメラ2の画像データのうち、連結先動線の始点フレーム1番号と一致するフレーム画像データを取り込む。
手順7.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順8.連結先動線の動線ID及び始点フレーム1インデックス情報と、人物画像データとを連結先動線メモリに記憶する。
手順9.連結元動線メモリからp番目レコードデータを選択する。
手順10.p番目レコードデータの終点フレームnインデックス情報に対し、始点フレーム1インデックス情報の時刻及び座標のずれがいずれも許容範囲内のq番目レコードデータを連結先動線メモリから選択する。
手順11.p番目レコードデータの人物画像とq番目レコードデータの人物画像とから人物同定処理を実行する。
手順12.人物同定処理により同一人物であると確認されると、p番目レコードデータの動線IDで特定される連結元動線データに、q番目レコードデータの動線IDで特定される連結先動線データを連結する。
手順13.連結元動線メモリ内の全てのレコードデータについて、手順9〜手順12を繰り返す。
【0082】
かくして、売場Aから売場Bに移動した買物客の動線データが連結される。次に、売場Bから売場Aに移動した買物客の動線データが以下の手順で連結される。
手順14.動線認識システムSBの動線データベース34SBから終点座標が通路領域AB内の動線データを連結元動線として選択する。
手順15.動線認識システムSBの画像データベース32SBから、識別情報#4,#5及び#6で特定されるカメラ2の画像データのうち、連結元動線の終点フレームn番号と一致するフレーム画像データを取り込む。
手順16.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順17.連結元動線の動線ID及び終点フレームnインデックス情報と、人物画像データとを連結元動線メモリに記憶する。
手順18.動線認識システムSAの動線データベース34SAから始点座標が通路領域AB内の動線データを連結先動線として選択する。
手順19.動線認識システムSAの画像データベース32SAから、識別情報#1,#2及び#3で特定されるカメラ2の画像データのうち、連結先動線の始点フレーム1番号と一致するフレーム画像データを取り込む。
手順20.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順21.連結先動線の動線ID及び始点フレーム1インデックス情報と、人物画像データとを連結先動線メモリに記憶する。
手順22〜手順26.手順9〜手順13と同一。
【0083】
かくして、売場Bから売場Aに移動した買物客の動線データが連結される。次に、売場Bから売場Cに移動した買物客、売場Cから売場Bに移動した買物客、売場Cから売場Dに移動した買物客、売場Dから売場Cに移動した買物客、売場Dから売場Aに移動した買物客、売場Aから売場Dに移動した買物客の順に、同様な手順で動線データが連結される。
【0084】
このように本実施形態によれば、複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを自動的に連結することができる。したがって、広域な領域全体を補っての動線認識を、オペレータの負担になることなく可能ならしめる効果を奏する。
【0085】
また、本実施形態では、連結元動線として選択された動線データの終点と連結先動線として選択された動線データの始点とが一致するように、少なくとも一方の動線データを補正するようにしている。したがって、連結元動線と連結先動線とを確実に接続することができる。
【0086】
なお、この発明は前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。
【0087】
例えば、前記実施形態では、図11の連結実行処理において、先にST69として時間のずれを判定し、次いでST70として座標のずれを判定したが、先に座標のずれを判定し後から時間のずれを判定してもよい。また、時間と座標のいずれか一方だけを判定し、許容範囲内であれば、人物同定処理を行うようにしてもよい。
【0088】
また、前記実施形態では、図1のST76において、連結先動線の始点が連結元動線の終点と一致するように連結先動線のデータを補正したが、連結元動線の終点が連結先動線の始点と一致するように連結元動線のデータを補正してもよい。また、動線データを補正するのでなく、連結元動線の終点と連結先動線の始点との間を直線で結ぶ線形補間により補間してもよい。あるいは、連結元動線の終点から数ポイント前までの各インデックス情報の二次元座標と連結先動線の始点から数ポイント先までの各インデックス情報の二次元座標とを比較し、最も近接した座標のインデックス情報を起点に、連結元動線データと連結先動線データとを連結するようにしてもよい。
【0089】
また、前記実施形態では、各売場の動線認識システムSA,SB,SC,SDを、カメラを用いた画像処理方式を採用したが、その他の方式、たとえば無線タグ追跡方式を採用してもよい。この場合、第1の動線認識エリアと該エリアに隣接する第2の動線認識エリアとの境界付近を、第1の動線認識エリア側から撮影するための第1のカメラと、第2の動線認識エリア側から撮影するための第2のカメラとを設置する。そして、各カメラのフレーム画像テータを時間情報と関連付けて画像データベースで記憶する。そして、第1の動線認識エリア内を移動して境界領域を終点とする連結元動線に対し、その終点座標と終点到達時刻に近似した始点座標及び始点検出時刻を有して第2の動線認識エリア内を移動する連結先動線が選択されると、第1のカメラの終点到達時刻をフレーム時刻とする画像データと第2のカメラの始点検出時刻をフレーム時刻とする画像データとにそれぞれ撮影されている人物の同定処理を行うことで、前記実施形態と同様な作用効果を奏することができる。
【0090】
ただし、本実施形態のように、カメラを用いた画像処理方式を採用することにより、動線認識用のカメラをそのまま動線連結を判定するための画像データ取得用のカメラとして兼用できるので、システムコストを低減できる効果を奏する。
【0091】
また、本発明は、隣接する売場間の顧客動線を連結する装置に限定されるものではなく、第1の動線認識エリア内を移動する移動体(人、動物、車両等)の動線データと、この第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体の動線データとを連結する装置にも同様に適用できるものである。
【0092】
また、前記実施形態では、田の字型に区分された売場の中心部で各売場が仕切られており、例えば売場Aに居る買物客は、売場Bまたは売場Dには行かれるが売場Cには行かれない店舗に本発明を適用したが、本発明を適用可能な店舗形態はこれに限定されるものではない。例えば、田の字型に区分された売場の中心部で各売場が仕切られていなくても、設定テーブル5に、項目「連結対象1」に対応して動線認識システムSAを、項目「判定カメラ1」に対応して#1を、項目「連結対象2」に対応して動線認識システムSCを、項目「判定カメラ2」に対応して#6をそれぞれ設定したレコードと、項目「連結対象1」に対応して動線認識システムSBを、項目「判定カメラ1」に対応して#4を、項目「連結対象2」に対応して動線認識システムSDを、項目「判定カメラ2」に対応して#3をそれぞれ設定したレコードとを追加することにより、前記実施形態と同様に適用できるものである。
【0093】
また、前記実施形態では、動線連結プログラムをプログラム記憶部44に予め記憶しているものとして本発明を説明したが、このプログラムは、ネットワークから動線連結装置4にダウンロードしても良いし、記録媒体に記憶させたものを動線連結装置4にインストールしてもよい。記録媒体としては、CD−ROM等プログラムを記憶でき、かつコンピュータが読み取り可能な記録媒体であれば、その形態は何れの形態であってもよい。また、このように予めインストールやダウンロードにより得る機能は、コンピュータ内部のOS(オペレーティング・システム)等と協働してその機能を実現させるものであってもよい。
【0094】
この他、前記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を組合わせてもよい。
【符号の説明】
【0095】
3SA,3SB,3SC,3SD…動線認識システム、4…動線連結装置、5…設定テーブル、32SA,32SB,32SC,32SD…画像データベース、34SA,34SB,34SC,34SD…動線データベース、43…データベースアクセス部、44…プログラム記憶部、47…制御部。
【先行技術文献】
【特許文献】
【0096】
【特許文献1】特開2009−009394号公報
【特許文献2】特開2001−209795号公報
【特許文献3】特開2009−059042号公報
【特許文献4】特開2002−305717号公報
【技術分野】
【0001】
本発明は、例えば店舗内を移動する買物客の軌跡を示す動線データの連結技術に関する。
【背景技術】
【0002】
スーパーマーケット,コンビニエンスストア等の店舗内を移動する買物客の軌跡を動線として認識する動線認識システムには、カメラを用いた画像処理方式や無線タグリーダを用いた無線タグ追跡方式等がある。画像処理方式の場合、現状の画像処理技術では、各カメラで監視領域の全エリアを死角なく撮影したとしても、一人の買物客の監視領域全域の動きを1つの動線として追跡することはきわめて困難である。例えば、他の買物客とすれ違った際に動線が途切れたり、動線が入れ替わったりする場合が考えられる。
【0003】
例えば特許文献1には、画像処理方式の動線認識システムにより生成された複数の動線データの中から同一客に対する動線データを選択し、それぞれを連結して1本の動線データを生成する動線編集システムが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、動線認識に必要な情報処理はコンピュータを用いて行うが、その情報処理には大きな負荷を要するため、1台のコンピュータに接続可能なカメラや無線タグリーダの台数には限りがある。このため、単一の動線認識システムで動線を認識可能な監視領域の広さには自ずと限界がある。そこで、複数の動線認識システムで認識された動線の中から同一人物に対する動線を連結する技術が求められている。
【0005】
本発明はこのような事情に基づいてなされたもので、その目的とするところは、複数の動線認識システムでそれぞれ認識される動線のなかから同一人物に対する動線どうしを連結することができ、広域な領域全体を補っての動線認識を可能ならしめる動線連結方法及び装置並びにプログラムを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の動線連結方法は、第1の動線認識エリア内を移動する移動体、例えば人物毎にその移動体が第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータが、第1の動線データベースに記憶された各動線データの中から、境界近傍を終点とする移動体の動線データを選択し(連結元動線選択段階)と、この選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択し(連結元画像選択段階)、この選択されたカメラ画像データから移動体画像を抽出する(連結元移動体画像抽出段階)。また、コンピュータが、第2の動線データベースに記憶された各動線データの中から、連結元動線選択段階により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択し(連結先動線選択段階)、この選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを第2の画像データベースから選択し(連結先画像選択段階)、この選択されたカメラ画像データから移動体画像を抽出する(連結先移動体画像抽出段階)。そして、コンピュータが、連結元移動体画像抽出段階により抽出された移動体画像と連結先移動体画像抽出段階により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定し、移動体が同一であると判定されると、連結元動線選択段階により選択された動線データに連結先動線選択段階により選択された動線データを連結することで、第1の動線データベースに記憶された各移動体の動線データと第2の動線データベースに記憶された各移動体の動線データとのなかから、同一移動体の動線データどうしを連結するようにしたものである。
【0007】
本発明の動線認識装置は、前記第1,第2の動線データベース及び第1,第2の画像データベースにアクセス可能で、第1の動線データベースに記憶された各動線データの中から、第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を終点とする移動体の動線データを選択する連結元動線選択手段と、この連結元動線選択手段により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択する連結元画像選択手段と、この連結元画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出手段と、第2の動線データベースに記憶された各動線データの中から、連結元動線選択手段により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択手段と、この連結先動線選択手段により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを第2の画像データベースから選択する連結先画像選択手段と、この連結先画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出手段と、連結元移動体画像抽出手段により抽出された移動体画像と連結先移動体画像抽出手段により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定手段と、この移動体同定手段により移動体が同一であると判定されると、連結元動線選択手段により選択された動線データに連結先動線選択手段により選択された動線データを連結する動線連結手段とを備えたものである。
【0008】
本発明の動線認識プロクラムは、前記第1,第2の動線データベース及び第1,第2の画像データベースにアクセス可能なコンピュータに、第1の動線データベースに記憶された各動線データの中から、第1の動線認識エリアと第2の動線認識エリアとが隣接する境界近傍を終点とする移動体の動線データを選択させる連結元動線選択機能と、の連結元動線選択機能により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを第1の画像データベースから選択させる連結元画像選択機能と、この連結元画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結元移動体画像抽出機能と、第2の動線データベースに記憶された各動線データの中から、連結元動線選択機能により選択された動線データの終点が検出された時点の前後に境界近傍を始点として追跡された移動体の動線データを選択させる連結先動線選択機能と、この連結先動線選択機能により選択された動線データの始点が検出された時点の境界近傍を撮影したカメラ画像データを第2の画像データベースから選択させる連結先画像選択機能と、この連結先画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結先移動体画像抽出機能と、連結元移動体画像抽出機能により抽出された移動体画像と連結先移動体画像抽出機能により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定させる移動体同定機能と、この移動体同定機能により移動体が同一であると判定されると、連結元動線選択機能により選択された動線データに連結先動線選択機能により選択された動線データを連結させる動線連結機能とを実現させるためのものである。
【発明の効果】
【0009】
かかる手段を講じた本発明によれば、複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを連結することができ、広域な領域全体を補っての動線認識を可能ならしめる効果を奏する。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施形態である動線連結装置の要部構成を示すブロック図。
【図2】同実施形態が適用される店舗の説明図。
【図3】同実施形態における動線認識システムの概略構成図。
【図4】同実施形態において、画像データベースに記憶される画像データの構造を示す模式図。
【図5】同実施形態において、動線データベースに記憶される動線データの構造を示す模式図。
【図6】同実施形態における動線認識システムのカメラレイアウトの一例を示す模式図。
【図7】同実施形態において、動線連結装置が有する設定テーブルの一データ例を示す模式図。
【図8】同実施形態において、動線連結プログラムが起動したときの動線連結装置の制御部が実行する主要な処理手順を示す流れ図。
【図9】図8における連結元動線検出処理の具体的処理手順を示す流れ図。
【図10】図8における連結先動線選択処理の具体的処理手順を示す流れ図。
【図11】図8における連結実行処理の具体的処理手順を示す流れ図。
【発明を実施するための形態】
【0011】
以下、本発明を実施形態について、図面を用いて説明する。
なお、この実施形態は、図2に示すように、互いに隣接して客が行き来できる4つの売場A,売場B,売場C及び売場Dを備えた店舗1に適用した場合である。
【0012】
図2に示すように、売場Aは、売場B及び売場Dと隣接し、売場Bは、売場A及び売場Cと隣接し、売場Cは、売場B及び売場Dと隣接し、売場Dは、売場C及び売場Aと隣接している。そして、隣接する各売場間には、それぞれ客が行き来できるように通路が形成されている。また、売場Aと売場Dとには、客が入退場可能な入退場口G1,G2が設けられている。
【0013】
各売場A〜Dには、それぞれその売場内を移動する移動体である人物(買物客)の軌跡を動線として認識するための動線認識システムSA,SB,SC,SDが構築されている。すなわち、売場Aは動線認識システムSAの動線認識エリアとなっており、売場Bは動線認識システムSBの動線認識エリアとなっており、売場Cは動線認識システムSCの動線認識エリアとなっており、売場Dは動線認識システムSDの動線認識エリアとなっている。
【0014】
本実施形態では、各動線認識システムSA,SB,SC,SDとして、いずれもカメラを用いた画像処理方式を採用する。画像処理方式の動線認識システムは、図3に示すように、複数基のカメラ2と、コンピュータを主体とした動線認識装置3とを備える。
【0015】
各カメラ2は、魚眼レンズを用いたカメラや全方位ミラー付のカメラ等の広角レンズカメラである。これらのカメラ2は、視体積交差法により、それぞれ対応する売場A,B,C,D内を移動する買物客の軌跡、すなわち人物動線を追跡するために用いられる。視体積交差法は、例えば客の頭部を複数の方向から撮影し、各画像の頭部の位置から頭部の店内空間に適宜設置された3次元座標系内の座標値を算出する方法である。1つの監視領域に配置されるカメラの台数は特に制限されないが、視体積交差法による位置検出精度を高めるためには少なくとも3台は必要である。
【0016】
各カメラ2は、動線認識装置3が備えるカメラコントロール部31の一元制御により一定の周期(例えば1/15秒)で撮影動作を繰り返し、その撮影画像(フレーム画像)を動線認識装置3に送信する。動線認識装置3は、カメラコントロール部31の他、カメラ画像データベース32、動線生成部33及び動線データベース34を備えている。
【0017】
カメラ画像データベース32は、各カメラ2で撮影されたフレーム画像データを順次蓄積する。カメラ画像データベース32に蓄積されるフレーム画像データの構造を、図4の模式図で示す。図4に示すように、フレーム画像データは、カメラID、フレーム番号及び撮影時刻が関連付けられて、カメラ画像データベース32に記憶される。カメラIDは、当該画像データを撮影したカメラ2の識別コードである。各カメラ2には、それぞれ固有のカメラIDが予め設定されている。フレーム番号は、各カメラ2でフレーム画像が撮影される毎にカウントアップされる“1”からの連続番号である。カメラコントロール部31の制御により、各カメラ2のフレーム番号は同期している。撮影日時は、当該画像データが撮影された時点の日時(年月日時分秒)である。
【0018】
動線生成部33は、カメラ画像データベース32に蓄積されたフレーム画像データの画像処理により動線認識エリア(売場)内を移動する買物客を認識し、この買物客が動線認識エリアに進入した地点である始点から退出した地点である終点までの動線認識エリア内での軌跡を示す動線データを作成する。動線生成部33は、例えば前記1に記載された技術により、複数に途切れた同一買物客の動線を1本の動線に連結する機能を有している。
【0019】
動線データベース34は、動線生成部33により買物客毎に生成される動線データを順次蓄積する。動線データベース34に蓄積される動線データの構造を、図5の模式図で示す。図5に示すように、動線データは、動線IDが関連付けられて、動線データベース34に記憶される。動線IDは、当該動線データを個々に特定するための動線特定情報である。動線生成部33は、買物客1名の動線データを生成する毎に、その動線データに固有の動線IDを付して、動線データベース34に格納する。
【0020】
動線データは、始点フレーム“1”のフレーム番号、及び終点フレーム“n”(n>1の整数)のフレーム番号と、始点フレーム“1”から終点フレーム“n”までのフレーム毎のインデックスデータとから構成されている。インデックスデータは、少なくとも店内の三次元座標(X,Y,H)とフレーム撮影時刻Tとを含む。始点フレーム“1”番号は、当該動線データの買物客が最初に認識されたフレーム画像のフレーム番号であり、このフレーム画像の撮影時刻が始点フレーム“1”に対するインデックスデータのフレーム撮影時刻Tとなる。終点フレーム”n”番号は、当該買物客が最後に認識されたフレーム画像のフレーム番号であり、このフレーム画像の撮影時刻が終点フレーム“n”に対するインデックスデータのフレーム撮影時刻Tとなる。フレーム番号毎の店内座標は、対応するフレーム番号のフレーム画像から認識された当該顧客の位置を、三次元の世界座標系(X,Y,H)で特定したものである。本実施形態では、図2において、左下の角をX軸及びY軸の原点O(0,0)とし、その床面をH(Height)軸の原点としている。
【0021】
図3の動線認識システムは、売場A,B,C,D毎に構築される。各動線認識システムのカメラ2は、それぞれ対応する売場A,B,C,Dの天井部等に分散して取り付けられる。本実施形態では、説明の便宜上、図6の#1〜#6に示すレイアウトで、カメラ2が売場A,B,C,D毎に各6基ずつ取り付けられているものとする。
【0022】
図1は、本発明に係わる動線連結装置4の要部構成を示すブロック図である。動線連結装置4は、入力部41、表示部42、データベースアクセス部43、プログラム記憶部44、データ記憶部45、ファイル記憶部46及び制御部47を備えている。入力部41は、キーボード,マウス等の入力デバイスからなる。表示部42は、液晶ディスプレイ,CRTディスプレイ等の表示デバイスからなる。タッチパネル付のディスプレイを用いることで、入力部と表示部を兼用してもよい。
【0023】
データベースアクセス部43は、各動線認識システムSA,SB,SC,SDの動線認識装置3(3SA,3SB,3SC,3SD)がそれぞれ有する動線データベース34SA,34SB,34SC,34SDとカメラ画像データベース32SA,32SB,32SC,32SDにアクセスし、動線データやフレーム画像データを読取ったり書き込んだりできる。
【0024】
プログラム記憶部44は、ROM(Read Only Memory)で構成されている。データ記憶部45は、RAM(Random Access Memory)で構成されている。ファイル記憶部46は、ハードディスクや光磁気ディスク等の記録媒体で構成されている。制御部47は、CPU(Central Processing Unit)を主体に構成されている。かかる構成の動線連結装置4は、パーソナルコンピュータ等のコンピュータ機器によって実現される。
【0025】
プログラム記憶部44には、コンピュータに、ある売場(動線認識エリア)の動線認識システムによって認識された動線データと、当該売場に隣接する他の売場の動線認識システムによって認識された動線データとの中から、売場間を行き来した同一買物客の動線データを選択させて連結させるプログラム、いわゆる動線連結プログラムが実装されている。制御部47は、上記動線連結プログラムに従い、動線データの連結を行う。
【0026】
以下、動線データの連結手順について、具体的に説明する。はじめに、各動線認識システムSA,SB,SC,SDの動線データベース34SA,34SB,34SC,34SDに記憶される動線データについて説明する。
【0027】
動線認識システムSAに対応した動線認識装置3SAの動線データベース34SAには、買物客が売場Aに進入した地点である始点から退出した地点である終点までの売場A内での軌跡を示す動線データが蓄積される。買物客は、入退場口G1または売場A,B間の通路AB若しくは売場D,A間の通路DAから売場Aに進入及び退出できる。したがって、動線データベース34SAに蓄積される動線データは、次の9種類である。
【0028】
1.入退場口G1から入店し、売場Aだけを回って入退場口G1から退店した買物客のデータ。
2.入退場口G1から入店し、通路ABを通って売場Bに移動した買物客のデータ。
3.入退場口G1から入店し、通路DAを通って売場Dに移動した買物客のデータ。
4.売場Bより通路ABを通って売場Aに入り、再び通路ABを通って売場Bに戻った買物客のデータ。
5.売場Bより通路ABを通って売場Aに入り、さらに通路DAを通って売場Dに移動した買物客のデータ。
6.売場Bより通路ABを通って売場Aに入り、入退場口G1から退店した買物客のデータ。
7.売場Dより通路DAを通って売場Aに入り、再び通路DAを通って売場Dに戻った買物客のデータ。
8.売場Dより通路DAを通って売場Aに入り、さらに通路ABを通って売場Bに移動した買物客のデータ。
9.売場Dより通路DAを通って売場Aに入り、入退場口G1から退店した買物客のデータ。
【0029】
動線認識システム2Bに対応した動線認識装置3SBの動線データベース34SBには、買物客が売場Bに進入した地点である始点から退出した地点である終点までの売場B内での軌跡を示す動線データが蓄積される。買物客は、通路ABまたは通路BCから売場Bに進入及び退出できる。したがって、動線データベース34SBに蓄積される動線データは、次の4種類である。
【0030】
1.売場Aより通路ABを通って売場Bに入り、再び通路ABを通って売場Aに戻った買物客のデータ。
2.売場Aより通路ABを通って売場Bに入り、さらに通路BCを通って売場Cに移動した買物客のデータ。
3.売場Cより通路BCを通って売場Bに入り、再び通路BCを通って売場Cに戻った買物客のデータ。
4.売場Cより通路BCを通って売場Bに入り、さらに通路ABを通って売場Aに移動した買物客のデータ。
【0031】
動線認識システム2Cに対応した動線認識装置3SCの動線データベース34SCには、買物客が売場Cに進入した地点である始点から退出した地点である終点までの売場C内での軌跡を示す動線データが蓄積される。買物客は、通路BCまたは通路CDから売場Cに進入及び退出できる。したがって、動線データベース34SCに蓄積される動線データは、次の4種類である。
【0032】
1.売場Bより通路BCを通って売場Cに入り、再び通路BCを通って売場Bに戻った買物客のデータ。
2.売場Bより通路BCを通って売場Cに入り、さらに通路CDを通って売場Dに移動した買物客のデータ。
3.売場Dより通路CDを通って売場Cに入り、再び通路CDを通って売場Dに戻った買物客のデータ。
4.売場Dより通路CDを通って売場Cに入り、さらに通路BCを通って売場Bに移動した買物客のデータ。
【0033】
動線認識システム2Dに対応した動線認識装置3SDの動線データベース34SDには、買物客が売場Dに進入した地点である始点から退出した地点である終点までの売場D内での軌跡を示す動線データが蓄積される。買物客は、入退場口G2または通路CD若しくは通路DAから売場Dに進入及び退出できる。したがって、動線データベース34SDに蓄積される動線データは、次の9種類である。
【0034】
1.入退場口G2から入店し、売場Dだけを回って入退場口G2から退店した買物客のデータ。
2.入退場口G2から入店し、通路DAを通って売場Aに移動した買物客のデータ。
3.入退場口G2から入店し、通路CDを通って売場Cに移動した買物客のデータ。
4.売場Aより通路DAを通って売場Dに入り、再び通路DAを通って売場Aに戻った買物客のデータ。
5.売場Aより通路DAを通って売場Dに入り、さらに通路CDを通って売場Cに移動した買物客のデータ。
6.売場Aより通路DAを通って売場Dに入り、入退場口G2から退店した買物客のデータ。
7.売場Cより通路CDを通って売場Dに入り、再び通路CDを通って売場Cに戻った買物客のデータ。
8.売場Cより通路CDを通って売場Dに入り、さらに通路DAを通って売場Aに移動した買物客のデータ。
9.売場Cより通路CDを通って売場Dに入り、入退場口G2から退店した買物客のデータ。
【0035】
ここで、売場Aとこの売場Aに隣接する売場Bとを考えると、その間の境界領域である通路ABを終点とする一方の動線認識システムによる動線データと、同通路ABを始点とする他方の動線認識システムによる動線データとを連結すればよい。すなわち、動線データベース34SAの2番目、4番目及び8番目のデータを連結元動線データとしたとき、動線データベース34SBの1番目と2番目のデータが連結先動線データの候補となる。逆に、動線データベース34SBの1番目と4番目のデータを連結元動線データとしたとき、動線データベース34SAの4番目,5番目及び6番目のデータが連結先動線データの候補となる。
【0036】
他の境界領域である通路BC,通路CD及び通路DAについても同様である。すなわち、動線データベース34SBの2番目及び3番目のデータを連結元動線としたとき、動線データベース34SCの1番目と2番目のデータが連結先動線の候補となり、動線データベース34SCの1番目と4番目のデータを連結元動線としたとき、動線データベース34SBの3番目と4番目のデータが連結先動線の候補となる。また、動線データベース34SCの2番目及び3番目のデータを連結元動線としたとき、動線データベース34SDの7番目、8番目及び9番目のデータが連結先動線の候補となり、動線データベース34SDの3番目、5番目及び7番目のデータを連結元動線としたとき、動線データベース34SCの3番目と4番目のデータが連結先動線の候補となる。また、動線データベース34SDの2番目、4番目及び8番目のデータを連結元動線としたとき、動線データベース34SAの7番目、8番目及び9番目のデータが連結先動線の候補となり、動線データベース34SAの3番目、5番目及び7番目のデータを連結元動線としたとき、動線データベース34SAの7番目、8番目及び9番目のデータが連結先動線の候補となる。
【0037】
さて、本実施形態では、連結元動線に連結先動線を連結するに際し、その可否判定に、境界領域である通路AB,通路BC,通路CD及び通路DAの近傍を撮影したカメラ画像を使用する。これを実現するために、動線連結装置4は、図7に示すデータ構造の設定テーブル5を備えている。設定テーブル5は、制御部47が内蔵するメモリに記憶されていてもよいし、データ記憶部45に記憶されていてもよい。図7の設定テーブル5は、図6に示したカメラレイアウトに対応している。
【0038】
図6の場合、売場Aと売場Bとを結ぶ通路ABを撮影可能なカメラ2は、売場A側の動線認識システムSAでは#1,#2,#3の3台であり、売場B側の動線認識システムSBでは#4,#5,#6の3台である。売場Bと売場Cとを結ぶ通路BCを撮影可能なカメラ2は、売場B側の動線認識システムSBでは#1,#4の2台であり、売場C側の動線認識システムSCでは#3,#6の2台である。売場Cと売場Dとを結ぶ通路CDを撮影可能なカメラ2は、売場C側の動線認識システムSCでは#4,#5,#6の3台であり、売場D側の動線認識システムSDでは#1,#2,#3の3台である。売場Dと売場Aとを結ぶ通路DAを撮影可能なカメラ2は、売場D側の動線認識システムSDでは#3,#6の2台であり、売場A側の動線認識システムSAでは#1,#4の2台である。
【0039】
設定テーブル5には、境界領域である通路を特定する情報(項目「境界領域」)に対応して、連結対象となる一方の動線認識システムの識別情報(項目「連結対象1」)、及びその動線認識システムにおいて連結可否判定に使用される画像を撮影するカメラの特定情報(項目「判定カメラ1」)と、連結対象となる他方の動線認識システムの識別情報(項目「連結対象2」)、及びその動線認識システムにおいて連結可否判定に使用される画像を撮影するカメラの特定情報(項目「判定カメラ2」)とが設定されている。
【0040】
例えば入力部41の操作入力により、動線連結業務の開始が指令されると、動線連結プログラムが起動する。これにより、制御部47は、図8の流れ図に示す手順で各部を制御する。
【0041】
先ず、ST(ステップ)1としてレコードカウンタrを“0”に初期化する。次いで、ST2として上記レコードカウンタrを“1”だけカウントアップする。そして、ST3としてこのレコードカウンタrが設定テーブル5のレコード数R(本実施形態では4)を超えたか否かを判断する。
【0042】
この時点では、未だ超えていないので、制御部47は、ST4として制御フラグFを“0”にリセットする。なお、レコードカウンタr及び制御フラグFは、データ記憶部45に記憶されている。
【0043】
次に、制御部47は、ST5として設定テーブル5からレコード番号rのレコード(「境界領域」、「連結対象1」、「判定カメラ1」、「連結対象2」、「判定カメラ2」)を取得する。そして、ST6としてレコード番号rの設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの動線データベースを連結元動線データベースとして設定する。また、ST7として、レコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの動線データベースを連結先動線データベースとして設定する。
【0044】
次に、制御部47は、ST8として連結元動線データベースから連結元動線を検出する処理、いわゆる連結元動線検出処理を実行し、続いて、ST9として連結先動線データベースから連結先動線を選択する処理、いわゆる連結先動線選択処理を実行する。しかる後、ST10として連結元動線に連結先動線を連結する連結実行処理を実行する。なお、これら連結元動線検出処理、連結先動線選択処理及び連結実行処理については後述する。
【0045】
これらの処理が終了すると、制御部47は、ST11として連結後の動線データが完全動線であるか否かを判断する。本実施形態では、始点と終点とがいずれも入退場口G1またはG2にある動線データを完全動線と称する。連結後の動線データが完全動線でない場合(ST11のNO)、制御部47は、ST12として連結後の動線データを連結先動線データベースに上書き保存する。これに対し、連結後の動線データが完全動線である場合は(ST11のYES)、制御部47は、ST13として連結後の動線データを完全動線データベースに新規保存する。完全動線データベースは、ファイル記憶部46に形成されている。
【0046】
連結後の動線データを連結先動線データベースまたは完全動線データベースに保存したならば、制御部47は、ST14として制御フラグFをチェックする。この時点では、制御フラグFは“0”にリセットされているので、制御部47は、ST15として制御フラグFを”1”にセットする。そして、ST16として、今度はレコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの動線データベースを連結元動線データベースとして設定する。また、ST17として、同設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの動線データベースを連結先動線データベースとして設定する。そして、制御部47は、再びST8〜ST10の連結元動線検出処理、連結先動線選択処理及び連結実行処理を実行する。その結果、連結後の動線データが完全動線でなければ(ST11のNO)、連結先動線データベースに上書き保存し(ST12)、完全動線であれば(ST11のYES)、完全動線データベースに新規保存する(ST13)。なお、連結後動線データを連結先動線データベースに上書き保存するのでなく、新規保存し、連結先動線データベースから連結前の連結先動線データを削除してもよい。
【0047】
こうして、連結後の動線データを連結先動線データベースまたは完全動線データベースに保存したならば、制御部47は、再び制御フラグFをチェックする(ST14)。この時点では、制御フラグFは“1”にセットされているので、制御部47は、ST2の処理に戻る。以後、制御部47は、レコードカウンタrがレコード数Rを越えるまで、ST4〜ST17の処理を繰返し実行する。レコードカウンタrがレコード数Rを越えたならば(ST3のYES)、設定テーブル5に設定されている全てのレコードについて処理されたので、動線連結プログラムが終了する。
【0048】
図9は連結元動線検出処理の具体的な処理手順を示す流れ図である。前記ST8にて連結元動線検出処理が開始されると、制御部47は、先ず、ST21として第1ポインタpを一旦“0”にリセットする。次いで、ST22として上記第1ポインタpを“1”だけ増加する。そして、ST23としてこの第1ポインタpが、前記ST6またはST16の処理で設定された連結元動線データベースの動線データ数PSを超えたか否かを判断する。
【0049】
第1ポインタpが連結元動線データベースの動線データ数PSを超えていない場合(ST23のNO)、制御部47は、ST24として連結元動線データベースからp番目の動線データを取り込む。そして、ST25としてこのp番目動線データの終点を示すフレームnインデックス情報から二次元座標(Xn,Yn)を検出する。そして、ST26としてこの二次元座標(Xn,Yn)の地点が、所定の境界領域BF内に位置するか否かを判断する。
【0050】
ここで、所定の境界領域BFとは、レコード番号rの設定テーブルレコードの項目「境界領域」の識別情報で特定される通路の領域(図6中、波線で囲われた通路AB,BC,CD,DAの各矩形領域)である。制御部47は、通路AB,BC,CD及びDAの境界領域毎に、その左上角の二次元座標と右下角の二次元座標とを示すデータを予め記憶している。ST26の処理にて二次元座標(Xn,Yn)を取得すると、この座標が、該当する境界領域BFの左上角と右下角の各座標を結ぶ矩形の領域内に存在するか否かを判別する。存在する場合には、当該動線データの終点が該当する境界領域BF内に位置すると決定する。
【0051】
当該動線データの終点が境界領域BF内に位置していない場合(ST26のNO)、制御部47は、ST22の処理に戻る。これに対し、当該動線データの終点が境界領域BF内に位置している場合には(ST26のYES)、制御部47は、当該動線データを連結元動線として選択する(連結元動線選択手段)。
【0052】
制御部47は、p番目動線データを連結元動線データとして選択すると、ST27として、このp番目動線データの終点フレームn番号を検出する。次いで、ST28としてレコード番号rの設定テーブルレコードの項目「連結対象1」の識別情報で特定される動線認識システムの画像データベースを検索する。そして、同設定テーブルレコードの[判定カメラ1]に設定されている識別情報で特定されるカメラ2の画像データの中から、終点フレームn番号が設定されたフレーム画像を取り込む(連結元画像選択手段)。
【0053】
次に、制御部47は、ST29として終点フレームn番号のフレーム画像データを解析して、これらの画像データから人物画像を抽出する(連結元移動体画像抽出手段)。そして、人物画像を抽出できたならば、制御部47は、ST30としてp番目動線データの動線ID、及び、終点を示すフレームnインデックス情報と、抽出された人物画像のデータとを関連付けた1レコードを生成し、データ記憶部45上の連結元動線メモリに記憶させる。しかる後、制御部47は、ST22の処理に戻る。
【0054】
以後、制御部47は、第1ポインタpを増加する毎に、ST24〜ST30の処理を繰返し実行する。そして、第1ポインタpが連結元動線データベースの動線データ数PSを超えたならば、この連結元動線検出処理を終了する。
【0055】
図10は連結先動線検出処理の具体的な処理手順を示す流れ図である。前記ST9にて連結先動線検出処理が開始されると、制御部47は、先ず、ST41として第1ポインタpを一旦“0”にリセットする。次いで、ST42として上記第1ポインタpを“1”だけ増加する。そして、ST43としてこの第1ポインタpが、前記ST7またはST17の処理で設定された連結先動線データベースのレコード数PFを超えたか否かを判断する。
【0056】
第1ポインタpが連結先動線データベースの動線データ数PFを超えていない場合(ST43のNO)、制御部47は、ST44として連結先動線データベースからp番目の動線データを取り込む。そして、ST45としてこのp番目動線データの始点を示すフレーム1インデックス情報から二次元座標(X1,Y1)を検出する。そして、ST46としてこの二次元座標(X1,Y1)の地点が、所定の境界領域BF内か否かを判断する。
【0057】
この判断処理は、前記連結元動線検出処理のST26の処理と同様である。p番目当該動線データの始点が境界領域BF内に位置していない場合(ST46のNO)、制御部47は、ST42の処理に戻る。これに対し、当該動線データの始点が境界領域BF内に位置している場合には(ST46のYES)、制御部47は、当該動線データを連結先動線として選択する(連結先動線選択手段)。
【0058】
制御部47は、p番目動線データを連結先動線データとして選択すると、ST47として、このp番目動線データの始点フレーム1番号を検出する。次いで、ST48としてレコード番号rの設定テーブルレコードの項目「連結対象2」の識別情報で特定される動線認識システムの画像データベースを検索する。そして、同設定テーブルレコードの[判定カメラ2]に設定されている識別情報で特定されるカメラ2の画像データの中から、始点フレーム1番号が設定されたフレーム画像を取り込む(連結先画像選択手段)。
【0059】
次に、制御部47は、ST49として始点フレーム1番号のフレーム画像データを解析して、これらの画像データから人物画像を抽出する(連結先移動体画像抽出手段)。そして、人物画像を抽出できたならば、制御部47は、ST50としてp番目動線データの動線ID、及び、始点を示すフレーム1インデックス情報と、抽出した人物画像のデータとを関連付けた1レコードを生成し、データ記憶部45上の連結先動線メモリに記憶させる。しかる後、制御部47は、ST42の処理に戻る。
【0060】
以後、制御部47は、第1ポインタpを増加する毎に、ST44〜ST50の処理を繰返し実行する。そして、第1ポインタpが連結先動線データベースの動線データ数PFを超えたならば、この連結先動線検出処理を終了する。
【0061】
図11は連結実行処理の具体的な処理手順を示す流れ図である。前記ST10にて連結実行処理が開始されると、制御部47は、先ず、ST61として第1ポインタpを一旦“0”にリセットする。次いで、ST62として上記第1ポインタpを“1”だけ増加する。そして、ST63としてこの第1ポインタpが連結元動線メモリのレコード数NSを超えたか否かを判断する。
【0062】
第1ポインタpが連結元動線メモリのレコード数NSを超えていない場合(ST63のNO)、制御部47は、ST64として連結元動線メモリからp番目のレコードデータを読み込む。
【0063】
次に、制御部47は、ST65として第2ポインタqを一旦“0”にリセットする。次いで、ST66として上記第2ポインタqを“1”だけ増加する。そして、ST67としてこの第2ポインタqが連結先動線メモリのレコード数NFを超えたか否かを判断する。
【0064】
第2ポインタqが連結先動線メモリのレコード数NFを超えていない場合(ST67のNO)、制御部47は、ST68として連結先動線メモリからq番目のレコードデータを読み込む。
【0065】
次に、制御部47は、ST69として連結元動線メモリから読込んだp番目レコードデータに含まれる終点フレームnインデックス情報の時刻Tnと、連結先動線メモリから読込んだq番目レコードデータに含まれる始点フレーム1インデックス情報の時刻T1とを比較し、時間差ΔT=|Tn−T1|を算出する。そして、この時間差ΔTが予め設定された許容範囲内か否かを判断する。時間差ΔTが許容範囲を超える場合(ST69のNO)、制御部47は、ST66の処理に戻る。
【0066】
時間差ΔTが許容範囲であった場合には(ST69のYES)、制御部47は、ST70として同終点フレームnインデックス情報の三次元座標(Xn,Yn,Hn)が示す地点から同始点フレーム1インデックス情報の三次元座標(X1,Y1,H1)が示す地点までの距離ΔLを算出する。そして、この距離ΔLが予め設定された許容範囲内か否かを判断する。距離ΔLが許容範囲を超える場合(ST70のNO)、制御部47は、ST66の処理に戻る。
【0067】
時間差ΔTに続いて距離ΔLが許容範囲であった場合には(ST70のYES)、制御部47は、ST71として連結元動線メモリのp番目レコードデータに含まれる人物画像データと連結先動線メモリのq番目レコードデータに含まれる人物画像データとから、両人物画像データで特定される人物が同一人物であるか否かを判定するための人物同定処理を実行する(移動体同定手段)。
【0068】
この人物同定処理の結果、同一人物でないと判定された場合には(ST72のNO)、制御部47は、ST66の処理に戻る。これに対し、同一人物であると判定された場合には(ST72のYES)、制御部47は、ST73として連結元動線メモリのp番目レコードデータに含まれる動線IDと、連結先動線メモリのq番目レコードデータに含まれる動線IDとを関連付けた1レコードを生成し、データ記憶部45上の連結対象メモリに記憶させる。
【0069】
しかる後、制御部47は、ST74として連結先動線メモリからq番目レコードデータを削除する。また、ST75として連結先動線メモリのレコード数NFを“1”だけ減算する。その後、制御部47は、ST62の処理に戻る。
【0070】
このように、連結元動線メモリのp番目レコードデータに対しては、その終点フレームnインデックス情報の時刻Tnに対する始点フレーム1インデックス情報の時刻T1の時間差ΔTが許容範囲内で、かつ、その終点座標(Xn,Yn,Hn)から始点座標(X1,Y1,H1)までの距離ΔLが許容範囲内のq番目レコードデータが、連結先動線の候補として選択される。
【0071】
制御部47は、連結先動線の候補となるq番目動線データを連結先動線メモリから取得できるまで、ST66〜ST70の処理を繰返し実行する。そして、連結先動線の候補となるq番目動線データを取得できたならば、制御部47は、前記人物同定処理を行う。その結果、同一人物でないと判定されたならば、再び、ST66〜ST70の処理を繰返し実行する。
【0072】
これに対し、同一人物であると判定されたならば、q番目動線データを連結先動線として決定する。そして、連結元動線であるp番目動線データの動線IDと、連結先動線であるq番目動線データの動線IDとを、連結対象メモリに記憶させる。このとき、連結先動線メモリからq番目動線データを削除する。そして、これに伴い、連結先動線メモリのデータ数NFを“1”だけ減算する。その後、制御部47は、ST62の処理に戻る。なお、連結先動線メモリに記憶されたレコードデータの全てをチェックしたが、連結先動線となり得るq番目レコードデータを検出できかった場合も、制御部47は、ST62の処理に戻る。
【0073】
以後、制御部47は、第1ポインタpをさらに“1”だけ増加して、ST64〜ST75の処理を再度実行する。そして、第1ポインタpが連結元動線メモリのレコード数NSを超えたならば、制御部47は、ST76の処理に進む。
【0074】
ST76では、連結対象メモリに記憶されたp番目レコードデータの動線IDによって特定される動線データを連結元動線とし、このp番目動線IDに対応するq番目レコードデータの動線IDによって特定される動線データを連結先動線として、両動線データを連結する。
【0075】
具体的には、制御部47は、先ず、連結元動線の終点座標(Xn,Yn,Hn)と、連結先動線の始点座標(X1,Y1,H1)とを比較する。そして、両座標が一致しない場合、制御部47は、終点座標(Xn,Yn,Hn)に対する始点座標(X1,Y1,H1)のずれを座標誤差として算出する。すなわち、X座標に対する誤差ΔXを“Xn−X1”で算出し、Y座標に対する誤差ΔYを“Yn−Y1”で算出し、Z座標に対する誤差ΔZを“Hn−H1”で算出する。そして、連結先動線の始点座標及び終点座標と各インデックス情報の座標に、それぞれ上記座標誤差ΔX,ΔY,ΔZを加算して、連結先動線の始点座標が連結元動線の終点座標と一致するように補正する(動線補正手段)。
【0076】
また、制御部47は、連結元動線の終点フレームnインデックス情報の時刻Tnと、連結先動線の始点フレーム1インデックス情報の時刻T1とを比較する。そして、両時刻が一致しない場合、制御部47は、時刻Tnに対する時刻T1のずれを時間誤差ΔT(=Tn−T1)として算出する。そして、連結先動線の各インデックス情報に含まれる時刻にそれぞれ上記時間誤差ΔTを加算して、連結先動線の始点座標が検出された時刻が連結元動線の終点座標が検出された時刻と一致するように補正する(動線補正手段)。
【0077】
しかる後、制御部47は、連結元動線に連結先動線を連結する。すなわち、連結元動線の終点座標を連結先動線の終点座標に置換する。また、連結元動線の最終インデックス情報(Xn,Yn,Tn)の後に、連結先動線のフレーム2インデックス情報(X2,Y2,T2)から後の全てのインデックス情報を追加する。こうすることにより、連結元動線のデータは、p番目動線データにq番目動線データを連結したデータとなる(動線連結手段)。
【0078】
制御部47は、連結対象メモリに記憶した全てのデータについて、ST76の動線連結処理を実行する。そして、実行完了後、この連結実行処理を終了する。
【0079】
ここで、図9のST29及び図10のST49において、カメラ画像データからゆがみのない人物画像を抽出する技術は、例えば2や3などに開示されている周知の技術を利用する。同様に、図11のST71において、抽出した2つの人物画像を対比(パターン認識、色ヒストグラム間の類似度等)して同一人物であるか否かを判定する人物同定処理の技術は、例えば4や前記3などに開示されている周知の技術を利用する。
【0080】
このように構成された本実施形態において、今、設定テーブル5のデータが図7の通りであったとする。この場合、先ず、売場Aから売場Bに移動した買物客の動線データが以下の手順で連結される。
【0081】
手順1.動線認識システムSAの動線データベース34SAから終点座標が通路領域AB内の動線データを連結元動線として選択する。
手順2.動線認識システムSAの画像データベース32SAから、識別情報#1,#2及び#3で特定されるカメラ2の画像データのうち、連結元動線の終点フレームn番号と一致するフレーム画像データを取り込む。
手順3.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順4.連結元動線の動線ID及び終点フレームnインデックス情報と、人物画像データとを連結元動線メモリに記憶する。
手順5.動線認識システムSBの動線データベース34SBから始点座標が通路領域AB内の動線データを連結先動線として選択する。
手順6.動線認識システムSBの画像データベース32SBから、識別情報#4,#5及び#6で特定されるカメラ2の画像データのうち、連結先動線の始点フレーム1番号と一致するフレーム画像データを取り込む。
手順7.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順8.連結先動線の動線ID及び始点フレーム1インデックス情報と、人物画像データとを連結先動線メモリに記憶する。
手順9.連結元動線メモリからp番目レコードデータを選択する。
手順10.p番目レコードデータの終点フレームnインデックス情報に対し、始点フレーム1インデックス情報の時刻及び座標のずれがいずれも許容範囲内のq番目レコードデータを連結先動線メモリから選択する。
手順11.p番目レコードデータの人物画像とq番目レコードデータの人物画像とから人物同定処理を実行する。
手順12.人物同定処理により同一人物であると確認されると、p番目レコードデータの動線IDで特定される連結元動線データに、q番目レコードデータの動線IDで特定される連結先動線データを連結する。
手順13.連結元動線メモリ内の全てのレコードデータについて、手順9〜手順12を繰り返す。
【0082】
かくして、売場Aから売場Bに移動した買物客の動線データが連結される。次に、売場Bから売場Aに移動した買物客の動線データが以下の手順で連結される。
手順14.動線認識システムSBの動線データベース34SBから終点座標が通路領域AB内の動線データを連結元動線として選択する。
手順15.動線認識システムSBの画像データベース32SBから、識別情報#4,#5及び#6で特定されるカメラ2の画像データのうち、連結元動線の終点フレームn番号と一致するフレーム画像データを取り込む。
手順16.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順17.連結元動線の動線ID及び終点フレームnインデックス情報と、人物画像データとを連結元動線メモリに記憶する。
手順18.動線認識システムSAの動線データベース34SAから始点座標が通路領域AB内の動線データを連結先動線として選択する。
手順19.動線認識システムSAの画像データベース32SAから、識別情報#1,#2及び#3で特定されるカメラ2の画像データのうち、連結先動線の始点フレーム1番号と一致するフレーム画像データを取り込む。
手順20.取り込んだフレーム画像データを解析して人物画像を抽出する。
手順21.連結先動線の動線ID及び始点フレーム1インデックス情報と、人物画像データとを連結先動線メモリに記憶する。
手順22〜手順26.手順9〜手順13と同一。
【0083】
かくして、売場Bから売場Aに移動した買物客の動線データが連結される。次に、売場Bから売場Cに移動した買物客、売場Cから売場Bに移動した買物客、売場Cから売場Dに移動した買物客、売場Dから売場Cに移動した買物客、売場Dから売場Aに移動した買物客、売場Aから売場Dに移動した買物客の順に、同様な手順で動線データが連結される。
【0084】
このように本実施形態によれば、複数の動線認識システムでそれぞれ認識される動線のなかから同一移動体に対する動線どうしを自動的に連結することができる。したがって、広域な領域全体を補っての動線認識を、オペレータの負担になることなく可能ならしめる効果を奏する。
【0085】
また、本実施形態では、連結元動線として選択された動線データの終点と連結先動線として選択された動線データの始点とが一致するように、少なくとも一方の動線データを補正するようにしている。したがって、連結元動線と連結先動線とを確実に接続することができる。
【0086】
なお、この発明は前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。
【0087】
例えば、前記実施形態では、図11の連結実行処理において、先にST69として時間のずれを判定し、次いでST70として座標のずれを判定したが、先に座標のずれを判定し後から時間のずれを判定してもよい。また、時間と座標のいずれか一方だけを判定し、許容範囲内であれば、人物同定処理を行うようにしてもよい。
【0088】
また、前記実施形態では、図1のST76において、連結先動線の始点が連結元動線の終点と一致するように連結先動線のデータを補正したが、連結元動線の終点が連結先動線の始点と一致するように連結元動線のデータを補正してもよい。また、動線データを補正するのでなく、連結元動線の終点と連結先動線の始点との間を直線で結ぶ線形補間により補間してもよい。あるいは、連結元動線の終点から数ポイント前までの各インデックス情報の二次元座標と連結先動線の始点から数ポイント先までの各インデックス情報の二次元座標とを比較し、最も近接した座標のインデックス情報を起点に、連結元動線データと連結先動線データとを連結するようにしてもよい。
【0089】
また、前記実施形態では、各売場の動線認識システムSA,SB,SC,SDを、カメラを用いた画像処理方式を採用したが、その他の方式、たとえば無線タグ追跡方式を採用してもよい。この場合、第1の動線認識エリアと該エリアに隣接する第2の動線認識エリアとの境界付近を、第1の動線認識エリア側から撮影するための第1のカメラと、第2の動線認識エリア側から撮影するための第2のカメラとを設置する。そして、各カメラのフレーム画像テータを時間情報と関連付けて画像データベースで記憶する。そして、第1の動線認識エリア内を移動して境界領域を終点とする連結元動線に対し、その終点座標と終点到達時刻に近似した始点座標及び始点検出時刻を有して第2の動線認識エリア内を移動する連結先動線が選択されると、第1のカメラの終点到達時刻をフレーム時刻とする画像データと第2のカメラの始点検出時刻をフレーム時刻とする画像データとにそれぞれ撮影されている人物の同定処理を行うことで、前記実施形態と同様な作用効果を奏することができる。
【0090】
ただし、本実施形態のように、カメラを用いた画像処理方式を採用することにより、動線認識用のカメラをそのまま動線連結を判定するための画像データ取得用のカメラとして兼用できるので、システムコストを低減できる効果を奏する。
【0091】
また、本発明は、隣接する売場間の顧客動線を連結する装置に限定されるものではなく、第1の動線認識エリア内を移動する移動体(人、動物、車両等)の動線データと、この第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体の動線データとを連結する装置にも同様に適用できるものである。
【0092】
また、前記実施形態では、田の字型に区分された売場の中心部で各売場が仕切られており、例えば売場Aに居る買物客は、売場Bまたは売場Dには行かれるが売場Cには行かれない店舗に本発明を適用したが、本発明を適用可能な店舗形態はこれに限定されるものではない。例えば、田の字型に区分された売場の中心部で各売場が仕切られていなくても、設定テーブル5に、項目「連結対象1」に対応して動線認識システムSAを、項目「判定カメラ1」に対応して#1を、項目「連結対象2」に対応して動線認識システムSCを、項目「判定カメラ2」に対応して#6をそれぞれ設定したレコードと、項目「連結対象1」に対応して動線認識システムSBを、項目「判定カメラ1」に対応して#4を、項目「連結対象2」に対応して動線認識システムSDを、項目「判定カメラ2」に対応して#3をそれぞれ設定したレコードとを追加することにより、前記実施形態と同様に適用できるものである。
【0093】
また、前記実施形態では、動線連結プログラムをプログラム記憶部44に予め記憶しているものとして本発明を説明したが、このプログラムは、ネットワークから動線連結装置4にダウンロードしても良いし、記録媒体に記憶させたものを動線連結装置4にインストールしてもよい。記録媒体としては、CD−ROM等プログラムを記憶でき、かつコンピュータが読み取り可能な記録媒体であれば、その形態は何れの形態であってもよい。また、このように予めインストールやダウンロードにより得る機能は、コンピュータ内部のOS(オペレーティング・システム)等と協働してその機能を実現させるものであってもよい。
【0094】
この他、前記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を組合わせてもよい。
【符号の説明】
【0095】
3SA,3SB,3SC,3SD…動線認識システム、4…動線連結装置、5…設定テーブル、32SA,32SB,32SC,32SD…画像データベース、34SA,34SB,34SC,34SD…動線データベース、43…データベースアクセス部、44…プログラム記憶部、47…制御部。
【先行技術文献】
【特許文献】
【0096】
【特許文献1】特開2009−009394号公報
【特許文献2】特開2001−209795号公報
【特許文献3】特開2009−059042号公報
【特許文献4】特開2002−305717号公報
【特許請求の範囲】
【請求項1】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータにより、前記第1の動線データベースに記憶された各移動体の動線データと前記第2の動線データベースに記憶された各移動体の動線データとのなかから、同一移動体の動線データどうしを連結する動線連結方法であって、
前記コンピュータは、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択する連結元動線選択段階と、
この連結元動線選択段階により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択する連結元画像選択段階と、
この連結元画像選択段階により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出段階と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択段階により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択段階と、
この連結先動線選択段階により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択する連結先画像選択段階と、
この連結先画像選択段階により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出段階と、
前記連結元移動体画像抽出段階により抽出された移動体画像と前記連結先移動体画像抽出段階により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定段階と、
この移動体同定段階により移動体が同一であると判定されると、前記連結元動線選択段階により選択された動線データに前記連結先動線選択段階により選択された動線データを連結する動線連結段階と、
を備えることを特徴とする動線連結方法。
【請求項2】
前記動線連結段階は、前記連結元動線選択段階により選択された動線データの終点と前記連結先動線選択段階により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正する動線補正段階を含むことを特徴とする請求項1記載の動線連結方法。
【請求項3】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択段階は、前記連結元動線選択段階により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択し、
前記連結元先画像選択段階は、前記連結先動線選択段階により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択することを特徴とする請求項1または2記載の動線連結方法。
【請求項4】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能であり、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択する連結元動線選択手段と、
この連結元動線選択手段により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択する連結元画像選択手段と、
この連結元画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出手段と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択手段により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択手段と、
この連結先動線選択手段により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択する連結先画像選択手段と、
この連結先画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出手段と、
前記連結元移動体画像抽出手段により抽出された移動体画像と前記連結先移動体画像抽出手段により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定手段と、
この移動体同定手段により移動体が同一であると判定されると、前記連結元動線選択手段により選択された動線データに前記連結先動線選択手段により選択された動線データを連結する動線連結手段と、
を具備したことを特徴とする動線連結装置。
【請求項5】
前記動線連結手段は、前記連結元動線選択手段により選択された動線データの終点と前記連結先動線選択手段により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正する動線補正手段を含むことを特徴とする請求項4記載の動線連結装置。
【請求項6】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択手段は、前記連結元動線選択手段により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択し、
前記連結元先画像選択手段は、前記連結先動線選択手段により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択することを特徴とする請求項4または5記載の動線連結装置。
【請求項7】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータに、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択させる連結元動線選択機能と、
この連結元動線選択機能により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択させる連結元画像選択機能と、
この連結元画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結元移動体画像抽出機能と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択機能により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択させる連結先動線選択機能と、
この連結先動線選択機能により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択させる連結先画像選択機能と、
この連結先画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結先移動体画像抽出機能と、
前記連結元移動体画像抽出機能により抽出された移動体画像と前記連結先移動体画像抽出機能により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定させる移動体同定機能と、
この移動体同定機能により移動体が同一であると判定されると、前記連結元動線選択機能により選択された動線データに前記連結先動線選択機能により選択された動線データを連結させる動線連結機能と、
を実現させるための動線連結プログラム。
【請求項8】
前記動線連結機能は、コンピュータに、前記連結元動線選択機能により選択された動線データの終点と前記連結先動線選択機能により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正させる動線補正機能を含むものである請求項7記載の動線連結プログラム。
【請求項9】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択機能は、コンピュータに、前記連結元動線選択機能により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択させ、
前記連結元先画像選択機能は、コンピュータに、前記連結先動線選択機能により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択させるものである請求項7または8記載の動線連結プログラム。
【請求項1】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータにより、前記第1の動線データベースに記憶された各移動体の動線データと前記第2の動線データベースに記憶された各移動体の動線データとのなかから、同一移動体の動線データどうしを連結する動線連結方法であって、
前記コンピュータは、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択する連結元動線選択段階と、
この連結元動線選択段階により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択する連結元画像選択段階と、
この連結元画像選択段階により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出段階と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択段階により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択段階と、
この連結先動線選択段階により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択する連結先画像選択段階と、
この連結先画像選択段階により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出段階と、
前記連結元移動体画像抽出段階により抽出された移動体画像と前記連結先移動体画像抽出段階により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定段階と、
この移動体同定段階により移動体が同一であると判定されると、前記連結元動線選択段階により選択された動線データに前記連結先動線選択段階により選択された動線データを連結する動線連結段階と、
を備えることを特徴とする動線連結方法。
【請求項2】
前記動線連結段階は、前記連結元動線選択段階により選択された動線データの終点と前記連結先動線選択段階により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正する動線補正段階を含むことを特徴とする請求項1記載の動線連結方法。
【請求項3】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択段階は、前記連結元動線選択段階により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択し、
前記連結元先画像選択段階は、前記連結先動線選択段階により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択することを特徴とする請求項1または2記載の動線連結方法。
【請求項4】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能であり、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択する連結元動線選択手段と、
この連結元動線選択手段により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択する連結元画像選択手段と、
この連結元画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結元移動体画像抽出手段と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択手段により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択する連結先動線選択手段と、
この連結先動線選択手段により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択する連結先画像選択手段と、
この連結先画像選択手段により選択されたカメラ画像データから移動体画像を抽出する連結先移動体画像抽出手段と、
前記連結元移動体画像抽出手段により抽出された移動体画像と前記連結先移動体画像抽出手段により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定する移動体同定手段と、
この移動体同定手段により移動体が同一であると判定されると、前記連結元動線選択手段により選択された動線データに前記連結先動線選択手段により選択された動線データを連結する動線連結手段と、
を具備したことを特徴とする動線連結装置。
【請求項5】
前記動線連結手段は、前記連結元動線選択手段により選択された動線データの終点と前記連結先動線選択手段により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正する動線補正手段を含むことを特徴とする請求項4記載の動線連結装置。
【請求項6】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択手段は、前記連結元動線選択手段により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択し、
前記連結元先画像選択手段は、前記連結先動線選択手段により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択することを特徴とする請求項4または5記載の動線連結装置。
【請求項7】
第1の動線認識エリア内を移動する移動体毎にその移動体が前記第1の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第1の動線認識エリア内での軌跡を示す動線データを記憶するための第1の動線データベース、前記第1の動線認識エリアに隣接する第2の動線認識エリア内を移動する移動体毎にその移動体が前記第2の動線認識エリアに進入した地点である始点から退出した地点である終点までの前記第2の動線認識エリア内での軌跡を示す動線データを記憶するための第2の動線データベース、少なくとも前記第1の動線認識エリアと前記第2の動線認識エリアとが隣接する境界近傍を前記第1の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第1の画像データベース、及び、少なくとも前記境界近傍を前記第2の動線認識エリア側から撮影したカメラ画像データを撮影時刻とともに記憶する第2の画像データベースの各データベースに対してアクセスが可能なコンピュータに、
前記第1の動線データベースに記憶された各動線データの中から、前記境界近傍を終点とする移動体の動線データを選択させる連結元動線選択機能と、
この連結元動線選択機能により選択された動線データの終点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第1の画像データベースから選択させる連結元画像選択機能と、
この連結元画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結元移動体画像抽出機能と、
前記第2の動線データベースに記憶された各動線データの中から、前記連結元動線選択機能により選択された動線データの終点が検出された時点の前後に前記境界近傍を始点として追跡された移動体の動線データを選択させる連結先動線選択機能と、
この連結先動線選択機能により選択された動線データの始点が検出された時点の前記境界近傍を撮影したカメラ画像データを前記第2の画像データベースから選択させる連結先画像選択機能と、
この連結先画像選択機能により選択されたカメラ画像データから移動体画像を抽出させる連結先移動体画像抽出機能と、
前記連結元移動体画像抽出機能により抽出された移動体画像と前記連結先移動体画像抽出機能により抽出された移動体画像とを照合して各画像の移動体が同一か否かを判定させる移動体同定機能と、
この移動体同定機能により移動体が同一であると判定されると、前記連結元動線選択機能により選択された動線データに前記連結先動線選択機能により選択された動線データを連結させる動線連結機能と、
を実現させるための動線連結プログラム。
【請求項8】
前記動線連結機能は、コンピュータに、前記連結元動線選択機能により選択された動線データの終点と前記連結先動線選択機能により選択された動線データの始点とが一致するように少なくとも一方の前記動線データを補正させる動線補正機能を含むものである請求項7記載の動線連結プログラム。
【請求項9】
前記第1の動線データベースに記憶される移動体の動線データは、前記第1の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記第2の動線データベースに記憶される移動体の動線データは、前記第2の動線認識エリア内を撮影したカメラ画像データから検出された当該移動体の位置座標と検出時点の時間情報とにその移動体を検出したカメラ画像データを特定するデータを関連付けた情報をインデックス情報として始点から終点まで時系列に蓄積したものであり、
前記連結元画像選択機能は、コンピュータに、前記連結元動線選択機能により選択された動線データの終点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第1の画像データベースから選択させ、
前記連結元先画像選択機能は、コンピュータに、前記連結先動線選択機能により選択された動線データの始点に対応したインデックス情報のカメラ画像データを特定するデータで特定されるカメラ画像データを前記第2の画像データベースから選択させるものである請求項7または8記載の動線連結プログラム。
【図1】


【図2】

【図3】

【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−170564(P2011−170564A)
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願番号】特願2010−32948(P2010−32948)
【出願日】平成22年2月17日(2010.2.17)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
【公開日】平成23年9月1日(2011.9.1)
【国際特許分類】
【出願日】平成22年2月17日(2010.2.17)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
[ Back to top ]