
勾配推定装置

【課題】勾配急変時、勾配変化初期、又は、加減速中であっても勾配を高い精度で推定できるようにする。
【解決手段】勾配推定装置11は、車両1の運転状態に基づき車両1に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき車両1が走行中の勾配を推定し、これを内部勾配演算値とする。また、勾配推定装置11は、ナビゲーションシステム28から車両が走行中の勾配を取得し、これをナビ勾配とする。そして、勾配推定装置11は、内部勾配演算値とナビ勾配との差分に基づき内部勾配演算値を補正する。
【解決手段】勾配推定装置11は、車両1の運転状態に基づき車両1に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき車両1が走行中の勾配を推定し、これを内部勾配演算値とする。また、勾配推定装置11は、ナビゲーションシステム28から車両が走行中の勾配を取得し、これをナビ勾配とする。そして、勾配推定装置11は、内部勾配演算値とナビ勾配との差分に基づき内部勾配演算値を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、勾配を推定する技術に関する。
【背景技術】
【0002】
特許文献1に記載の自動変速機の変速制御装置は、勾配を推定する機能を有している。当該変速制御装置は、推定した勾配に応じてシフトパターンを変更し、勾配に適した変速を実現している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−167273号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
勾配は、車両の運転状態(車速、エンジン回転速度等)から演算によって求まる重量勾配抵抗に基づき推定することが可能である。
【0005】
しかしながら、従来の勾配の推定は、勾配急変時、勾配変化初期、又は、加減速中において、推定精度が低いとう問題があった。これは、推定処理の途中にフィルタリング処理が入っているので推定された勾配は実勾配に対して遅れ、また、加減速中は重量勾配抵抗の演算に用いる駆動力の演算誤差が大きくなるからである。
【0006】
本発明は、このような技術的課題に鑑みてなされたもので、勾配急変時、勾配変化初期、又は、加減速中であっても勾配を高い精度で推定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明のある態様によれば、勾配推定装置は、車両の運転状態に基づき車両に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき車両が走行中の勾配を推定し、これを内部勾配演算値とする。また、勾配推定装置は、ナビゲーションシステムから車両が走行中の勾配を取得し、これをナビ勾配とする。そして、勾配推定装置は、内部勾配演算値とナビ勾配との差分に基づき内部勾配演算値を補正することによって補正後勾配を演算する。
【発明の効果】
【0008】
上記態様によれば、実勾配と内部勾配演算値とのずれが大きくなる勾配急変時、勾配変化初期、又は、加減速中であっても、補正後勾配は内部勾配演算値に比べ実勾配により早く近づくことができ、勾配を高い精度で推定することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係る勾配推定装置を備えた車両の概略構成図である。
【図2】内部勾配演算値に誤差が生じる様子を示した図である。
【図3A】内部勾配演算値補正処理の内容を示したフローチャートである。
【図3B】内部勾配演算値補正処理の内容を示したフローチャートである。
【図4】ナビ勾配と勾配補正の有無との関係を示した図である。
【図5】ナビ勾配時間変化率の絶対値と勾配補正の有無との関係を示した図である。
【図6】加減速中か否かの判定の様子を示した図である。
【図7】加減速中の補正許可領域を示した図である。
【図8】勾配補正量を設定するためのテーブルである。
【図9】目標補正量を設定するためのテーブルである。
【図10】内部勾配演算値の時間変化率の絶対値と勾配補正の有無との関係を示した図である。
【図11】非加減速中の補正許可領域を示した図である。
【図12】内部勾配演算値が補正される様子を示したタイムチャートである。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0011】
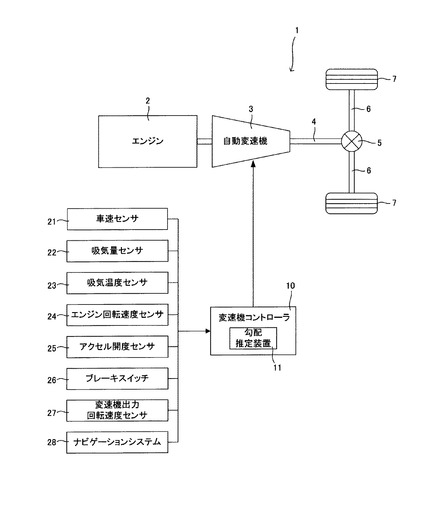
図1は、本発明の実施形態に係る勾配推定装置を備えた車両の概略構成図である。
【0012】
車両1は、動力源としてエンジン2を備え、エンジン2の動力が、自動変速機3、プロペラシャフト4、デファレンシャルユニット5及びドライブシャフト6を介して左右後輪7に伝達される構成である。
【0013】
変速機コントローラ10は、自動変速機3の変速段を制御するコントローラである。変速機コントローラ10には、車速センサ21、吸気量センサ22、吸気温度センサ23、エンジン回転速度センサ24、アクセル開度センサ25、ブレーキスイッチ26、変速機出力回転速度センサ27、ナビゲーションシステム28等からの信号が入力される。変速機コントローラ10は、これらセンサ及びデバイスからの入力信号に基づき、図示しない変速マップを参照して目標とする変速段を設定し、設定された変速段が実現されるように自動変速機3を制御する。
【0014】
変速機コントローラ10は、内部に勾配推定装置11を備えており、勾配推定装置11によって推定されたた勾配に基づき、変速マップの変速線を変更して、登坂路及び降板路における運転性を向上させる。例えば、登坂路であれば、ロー側の変速段が多用されるように変速線を変更する。
【0015】
勾配推定装置11は、エンジン2の駆動力Fから加速抵抗R1、空気抵抗R2及び転がり抵抗R3を減じ、その値にフィルタ処理を施すことによって重量勾配抵抗R0を演算する。
【0016】
エンジン2の駆動力Fは、エンジン2の回転速度と吸気量とに基づき所定のマップを参照することによってエンジン2のトルクを演算し、これと自動変速機3のトルクコンバータのトルク比、自動変速機3の変速比、終減速比、自動変速機3の伝達効率、及び、駆動輪である左右後輪7のタイヤ径に基づき演算される。
【0017】
加速抵抗R1は、車両1の重量及び加速度に基づき演算される。車両1の加速度は、変速機出力回転速度の時間変化率、タイヤ径及び終減速比に基づき演算される。以後、このようにして演算された車両加速度を「内部演算加速度」と称する。
【0018】
空気抵抗R2は、車速、車両1の前面投影面積、空気密度、及び、空気抵抗係数に基づき演算される。
【0019】
転がり抵抗R3は、車両1の重量及び転がり抵抗係数に基づき演算される。
【0020】
重量勾配抵抗R0が演算された、重量勾配抵抗と勾配との関係を規定したテーブルを参照して、車両1が現在走行中の路面の勾配を演算する。このようにして演算された勾配を以後、「内部勾配演算値」と称する。
【0021】
しかしながら、このようにして演算された内部勾配演算値は勾配急変時、勾配変化初期、又は、加減速中において、推定精度が低いとう問題があった。これは、上記の通り、勾配を推定する処理にはフィルタ処理が含まれており、また、加減速時は、重量勾配抵抗の演算に用いられるエンジン2の駆動力の演算精度が低くなるからである。
【0022】
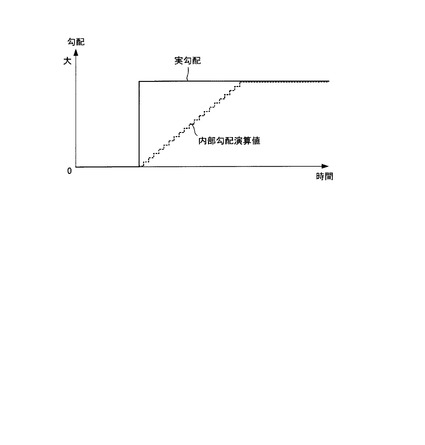
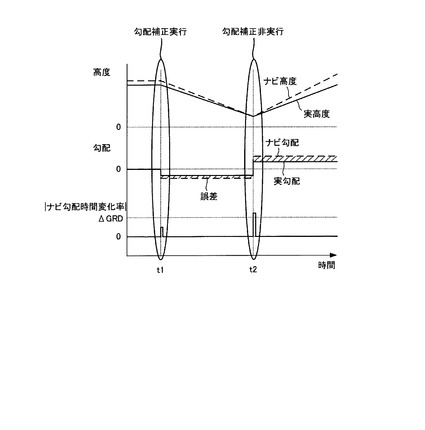
図2は、実勾配が変化したときの内部勾配演算値の変化を模式的に表した図である。内部勾配演算値の演算過程には複数のフィルタ処理が入るため、内部勾配演算値はこのように実勾配の変化に対して遅れて変化する。
【0023】
一方、ナビゲーションシステム28は地図データを備え、現在位置情報と地図データとから高度情報が得られるので、これに基づき勾配を演算すようにすることも考えられるが(以下、このようにして演算された勾配を「ナビ勾配」と称する。)、ナビゲーションシステム28に格納されている地図データには、メモリ容量(地図データを内部メモリに格納する場合)や通信速度(地図データを無線通信によって外部から入手する場合)の関係でデータが間引きされることによる誤差や、測量誤差が含まれていることから、ナビ勾配をそのまま制御に用いるには問題がある。
【0024】
そこで、勾配推定装置11は、内部勾配演算値をナビ勾配に基づき補正することで、より実際の勾配に近い勾配が得られるようにする。
【0025】
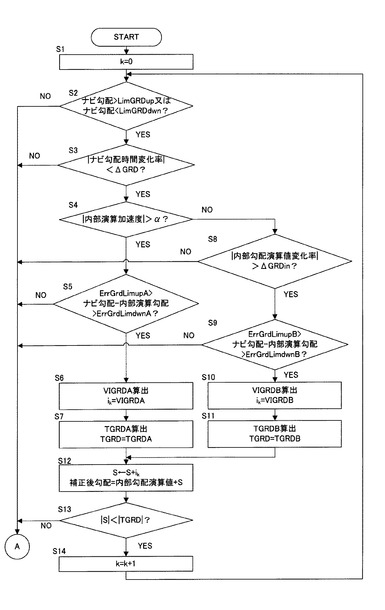
図3A及び図3Bは、内部勾配演算値を補正し、より実際の勾配に近い補正後勾配を得るための処理(内部勾配演算値補正処理)の内容を示したフローチャートであり、勾配推定装置11によって実行される。以下、これを参照しながら、内部勾配演算値の補正処理の内容について説明する。
【0026】
まず、勾配推定装置11は、カウンタkを0にセットする。カウンタkは、内部勾配演算値に後述する勾配補正量ikを加算した回数をカウントするカウンタである。
【0027】
次に、勾配推定装置11は、ナビ勾配が登坂判定しきい値LimGRDupよりも大きいか、及び、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さいかを判定する(S2)。ナビ勾配は、上記の通り、ナビゲーションシステム28からの高度情報に基づき演算される勾配であり、登坂路で正の値、平坦路でゼロ、降板路で負の値をとる。
【0028】
ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さい場合、すなわち、内部勾配演算値の補正が必要な状況である場合は、処理がS3に進む。
【0029】
これに対し、ナビ勾配が登坂判定しきい値LimGRDupと降坂判定しきい値LimGRDdwnとの間にある場合、すなわち、平坦路を走行中か勾配が僅かで内部勾配演算値の補正が必要でない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。
【0030】
平坦路や勾配が僅かな場合に内部勾配演算値の補正をしないのは、内部勾配演算値の誤差が少なく補正の必要が少ないことに加え、補正が頻繁に行われることによる補正後勾配のふらつきを防止するためである。
【0031】
この結果、図4に示すように、ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さい場合のみ、勾配推定装置11は内部勾配演算値の補正を行う。
【0032】
S3では、勾配推定装置11は、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さいか判断し、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さい場合は、処理がS4に進む。
【0033】
これに対し、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも大きい場合は、ナビ勾配の変化が極端であり、ナビ勾配が誤差を含んでいる可能性が高いので、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。
【0034】
ナビ勾配が極端に変化される場合とは、例えば、GPSによって自車位置を正確に測位できず地図上の自車位置が実際の自車位置とずれている場合に、その後自車位置が正確に測位されて地図上の自車位置が実際の自車位置まで瞬時に移動し、ナビゲーションシステム28からの高度情報が急激に変化する場合や、ナビゲーションシステム28のメモリ容量や通信速度の関係でデータが間引きされ、ナビ勾配が実際の勾配より急激に変化するような場合である。
【0035】
図5は、時間の経過とともにナビ勾配が変化する様子を示している。勾配推定装置11は、ナビ勾配の時間変化率が上限変化率ΔGRDよりも小さくなる時刻t1では、内部勾配演算値の補正を実行するが、ナビ勾配の時間変化率が上限変化率ΔGRDよりも大きく、ナビ勾配の誤差が大きい可能性の高いと判断される時刻t2では、内部勾配演算値の補正を行わない。
【0036】
S4では、勾配推定装置11は、内部演算加速度の絶対値が加減速判定しきい値αよりも大きいか判断する。この判断は、車両加減速中は駆動力変化が大きく、非加減速中と比べて内部勾配演算値の誤差が大きくなるので、車両1が加減速中か否かで内部勾配演算値の補正処理を異ならせるために行われる。
【0037】
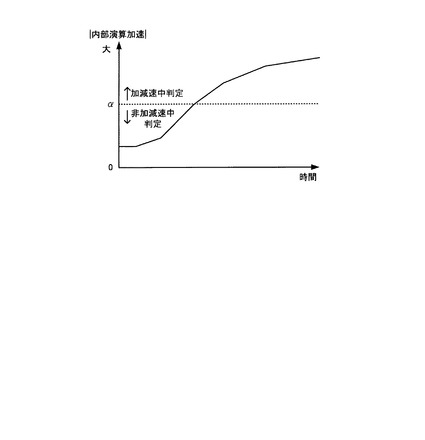
図6は、加減速中か否かの判定の様子を示しており、内部演算加速度の絶対値が加減速判定しきい値αよりも大きい場合は加減速中と判断され、小さい場合は非加減速中(定常走行又は緩加減速)と判断される。
【0038】
内部演算加速度の絶対値が加減速判定しきい値αよりも大きく加減速中との判断がなされた場合は処理がS5に進み、内部演算加速度の絶対値が加減速判定しきい値αよりも小さく非加減速中との判断がなされた場合は処理がS8に進む。
【0039】
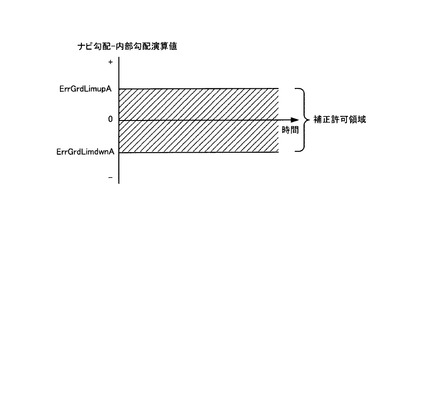
S5では、勾配推定装置11は、ナビ勾配と内部勾配演算値との差分を上限差分値ErrGrdLimupA及び下限差分値ErrGrdLimdwnAと比較し、差分が上限差分値ErrGrdLimupAと下限差分値ErrGrdLimdwnAとの間に入っているか、すなわち、差分が図7に示される補正許可領域に入っているか判断し、差分が補正許可領域に入っている場合は処理がS6に進む。
【0040】
差分が補正許可領域に入っていない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、差分が補正許可領域に入っていない場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が実行されるのを回避するためである。
【0041】
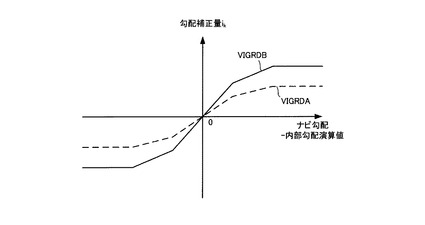
S6では、勾配推定装置11は、図8に示すテーブルを参照して、ナビ勾配と内部勾配演算値との差分に基づき、加減速時補正量VIGRDAを取得し、これを勾配補正量ikとして設定する。加減速時補正量VIGRDAは、ナビ勾配と内部勾配演算値との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば加減速時補正量VIGRDAは一定値をとる。すなわち、加減速時補正量VIGRDAには上限及び下限が設定される。
【0042】
これは、差分の絶対値が大きいほど、勾配補正量ikを増やし、内部勾配演算値が速やかに実勾配に近づくようにする一方で、補正後勾配が急変することよって補正後勾配を使用する制御(例えば、変速制御)に悪影響を及ぼしてしまうのを防止するためである。
【0043】
S7では、勾配推定装置11は、図9に示すテーブルを参照して、ナビ勾配と補正後勾配との差分に基づき、加減速時目標補正量TGRDAを取得し、これを目標補正量TGRDとして設定する。なお、S7の処理を初めて実行する場合は補正後勾配の値がないので、内部勾配演算値を補正後勾配として使用する。
【0044】
加減速時目標補正量TGRDAは、ナビ勾配と補正後勾配との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば加減速時目標補正量TGRDAは一定値をとる。すなわち、加減速時目標補正量TGRDAには上限及び下限が設定される。
【0045】
これは、差分の絶対値が大きいほどより大きな補正がなされるようにするためである。また、後述するように、内部勾配演算値に加算された勾配補正量ikの合計Sが目標補正量TGRDに達し、内部勾配演算値に加算する値を目標補正量TGRDから徐々に減らしていった場合に、補正後勾配が実勾配をオーバーシュートすることなく内部勾配演算値に収束するようにするためである。
【0046】
一方、内部演算加速度が加減速判定しきい値αよりも小さいとして進んだS8では、勾配推定装置11は、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも大きいか判断し、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも大きい場合は処理がS9に進む。
【0047】
これに対し、下限変化率ΔGRDinよりも小さい場合は処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、S2の処理と同趣旨で、内部勾配演算値の補正が必要な状況でのみ内部勾配演算値の補正が行われ、また、補正が頻繁に行われることによる補正後勾配のふらつきを防止するためである。
【0048】
図10は、S8の処理によって、内部勾配演算値の補正が許可・禁止される様子を示している。この図に示されるように、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも小さい場合は、内部勾配演算値の補正が禁止される。
【0049】
なお、フィルタ処理後ではなくフィルタ処理前の内部勾配演算値を用いるようにしているのは、フィルタ処理後の値は実勾配に対して遅れがあるのでその時点における勾配を判断するために用いるのは適切でないのと、非加減速中であれば演算される駆動力の演算誤差が小さく、内部勾配演算値の誤差も小さいので、フィルタ処理前の値であっても勾配の判断に十分使用可能だからである。
【0050】
フィルタ処理前の内部勾配演算値の時間変化率の絶対値が上限変化率ΔGRDinよりも大きい場合は、処理がS9に進む。
【0051】
S9では、勾配推定装置11は、ナビ勾配と内部勾配演算値との差分を上限差分値ErrGrdLimupB及び下限差分値ErrGrdLimdwnBと比較し、差分が上限差分値ErrGrdLimupBと下限差分値ErrGrdLimdwnBとの間に入っているか、すなわち、差分が図11に示される補正許可領域に入っているか判断し、差分が補正許可領域に入っている場合は処理がS10に進む。
【0052】
上限差分値ErrGrdLimupBは加減速中に使用される上限差分値ErrGrdLimupAよりも大きく、また、下限差分値ErrGrdLimdwnBは加減速中に使用される下限差分値ErrGrdLimdwnAよりも小さい。すなわち、補正許可領域は、非加減速中は、加減速中と比べて大きくなる。
【0053】
これは、非加減速中は、ナビ情報、内部勾配演算値ともに精度が高く、より広範囲にわたって補正が可能であることによる。
【0054】
差分が補正許可領域に入っていない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、差分が補正許可領域に入っていない場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が実行されるのを回避するためである。
【0055】
S10では、勾配推定装置11は、図8に示すテーブルを参照して、ナビ勾配と内部勾配演算値との差分に基づき、非加減速時補正量VIGRDBを取得し、これを勾配補正量ikとして設定する。非加減速時補正量VIGRDBは、ナビ勾配と内部勾配演算値との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば非加減速時補正量VIGRDBは一定値をとる。すなわち、非加減速時補正量VIGRDBには上限及び下限が設定される。
【0056】
これは、差分の絶対値が大きいほど、勾配補正量ikを増やし、内部勾配演算値が速やかに実勾配に近づくようにする一方で、補正後勾配が急変することよって補正後勾配を使用する制御(例えば、変速制御)に悪影響を及ぼしてしまうのを防止するためである。
【0057】
非加減速時補正量VIGRDBの傾向は、加減速中の加減速時補正量VIGRDAと同じ傾向であるが、非加減速中は、ナビ勾配、内部勾配演算値ともに精度が高いので、勾配補正量ikがより大きな値となるように、ナビ勾配と内部勾配演算値との差分が同じであれば、非加減速時補正量VIGRDBは加減速時補正量VIGRDAよりも大きな値に設定される。
【0058】
S11では、勾配推定装置11は、図9に示すテーブルを参照して、ナビ勾配と補正後勾配との差分に基づき、非加減速時目標補正量TGRDBを取得し、これを目標補正量TGRDとして設定する。なお、S11の処理を初めて実行する場合は、補正後勾配の値がないので、内部勾配演算値を補正後勾配として使用する。
【0059】
非加減速時目標補正量TGRDBは、ナビ勾配と補正後勾配との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば非加減速時目標補正量TGRDBは一定値をとる。すなわち、非加減速時目標補正量TGRDBには上限及び下限が設定される。
【0060】
これは、差分の絶対値が大きいほど、より大きな補正がなされるようにするためである。また、後述するように、内部勾配演算値に加算される勾配補正量ikの合計Sが目標補正量TGRDに達し、内部勾配演算値に加算する値を目標補正量TGRDから徐々に減らしていった場合に、補正後勾配が実勾配をオーバーシュートすることなく内部勾配演算値に収束するようにするためである。
【0061】
非加減速時目標補正量TGRDBの傾向は、加減速中の加減速時目標補正量TGRDAと同じ傾向であるが、非加減速中は、ナビ勾配、内部勾配演算値ともに精度が高いので、目標補正量TGRAがより大きな値となるように、ナビ勾配と補正勾配との差分が同じであれば、非加減速時目標補正量TGRDBは加減速時目標補正量TGRDAよりも大きな値に設定される。
【0062】
S6又はS10で勾配補正量ikが設定され、S7又はS8で目標補正量TGRDが設定されたら、勾配推定装置11は、勾配補正量ikの合計S(初期値は0)を更新し、合計Sを内部勾配演算値に加算することで補正後勾配を演算する(S12)。そして、勾配推定装置11は、カウンタkに1を加算する(S14)。
【0063】
以後、処置はS2に戻り、S2〜S13の処理が再び実行され、補正後勾配が更新される。
【0064】
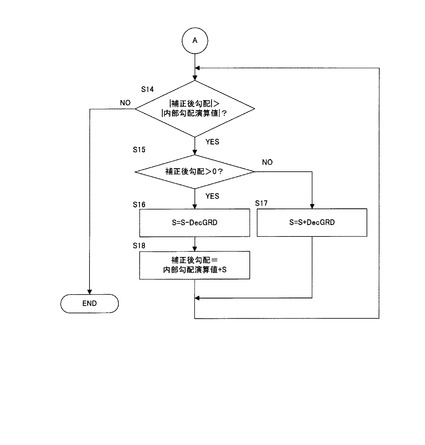
その後、内部勾配演算値に加算される勾配補正量ikの合計Sの絶対値が目標補正量TGRDの絶対値に達したら、処理がS13からS14(図3B)に進む(S13)。
【0065】
S14では、勾配推定装置11は、補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きいか判断する。補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きい場合は、補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きくなくなるまで、補正後勾配に加算する値を目標補正量TGRDから所定値DecGRDずつ減少させる処理(S15〜S18)を繰り返す。
【0066】
これによって、補正後勾配を徐々に内部勾配演算値に近づけ、最終的には補正後勾配を内部勾配演算値に一致させ、内部勾配演算値の補正処理を終了する。
【0067】
続いて、上記内部勾配演算値の補正を行うことによる作用効果について説明する。
【0068】
図12は、上記処理によって内部勾配演算値が補正される様子を示したタイムチャートである。
【0069】
この図に示されるように、内部勾配演算値はフィルタ処理があるために実勾配に対して遅れて変化し、補正後勾配は、ナビ勾配と内部勾配演算値との差分に基づき演算される勾配補正量ikを繰り返し内部勾配演算値に加算することで演算される(S13)。
【0070】
この結果、実勾配と内部勾配演算値とのずれが大きくなる勾配急変時、勾配変化初期、又は、加減速中であっても、補正後勾配は内部勾配演算値に比べ実勾配により早く近づくことができ、勾配を高い精度で推定することができる。
【0071】
そして、内部勾配演算値に加算された勾配補正量ikの合計Sが目標補正量TGRDに達したら、以後、内部勾配演算値に加算される値を目標補正量からDecGRDずつ減少させて、補正後勾配を内部勾配演算値に近づけるので(S14〜S18、図12中Aで囲んだ部分)、補正後勾配が実勾配をオーバーシュートするのを防止することができる。
【0072】
また、車両1の加速度の絶対値が加減速判定しきい値αよりも小さい場合は、車両1の加速度の絶対値が加減速判定しきい値αよりも大きい場合よりも、内部勾配演算値の補正を大きくするようにした。
【0073】
具体的には、内部勾配演算値とナビ勾配との差分に対する内部勾配演算値の補正量である勾配補正量ikの関係を規定するテーブルを、車両1の加速度が加減速判定しきい値αよりも小さい非加減速中と加減速判定しきい値αよりも大きい加減速中とそれぞれの場合について用意し(S6、S10、図8、図8は2つのテーブルを重ね合わせたもの)、これらのテーブルを参照して勾配補正量ikを演算するようにした。
【0074】
非加減速中はナビ勾配及び内部勾配演算値の精度が高いので、勾配補正量ikを増やしても問題は無く、これによって補正後勾配をより早く実勾配に近づけることが可能になる。また、加減速中と非加減速中で勾配補正量ikを異ならせる方法としては、本実施形態のようにそれぞれの場合について内部勾配演算値とナビ勾配との差分に対する勾配補正量ikの関係を規定するテーブルを用意するのが簡便で好適である。
【0075】
また、車両1の加速度の絶対値が加減速判定しきい値αよりも小さい場合は、内部勾配演算値の時間変化率の絶対値が上限変化率ΔGRDinよりも大きい場合にのみ、内部勾配演算値の補正を行うようにした(S8、図10)。非加減速中は、内部勾配演算値の精度が高いので、内部勾配演算値に基づき比較的精度よく勾配を判断することが可能である。そして、内部勾配演算値の補正を、内部勾配演算値の時間変化率が下限変化率ΔGRDinよりも大きい場合に限定することで、内部勾配演算値の補正が必要な状況でのみ実行されるようにし、内部勾配演算値の補正が不要な状況(平坦路、又は、勾配が僅かな状況)で内部勾配演算値の補正が頻繁に行われ、補正後勾配の値がふらつくのを防止することができる。
【0076】
また、ナビ勾配と内部勾配演算値との差分が、下限差分値ErrGrdLimdwnA(又はErrGrdLimdwnB)と上限差分値ErrGrdLimupA(又はErrGrdLimupB)の間にある場合にのみ、内部勾配演算値の補正を行うようにした(S5、S9、図7、図11)。これにより、ナビ勾配に含まれる誤差が大きい可能性がある状況では内部勾配演算値の補正が行われなくなり、ナビ勾配の誤差が大きい状況で内部勾配演算値の補正が行われることによる、勾配の推定精度悪化を防止することができる。
【0077】
このとき、車両1の加速度が加減速判定しきい値αよりも小さい場合は、車両1の加速度が加減速判定しきい値αよりも大きい場合よりも、下限差分値を小さくするとともに、上限差分値を大きくするようにした(S5、S9、図7、図11)。これにより、ナビ勾配及び内部勾配演算値の精度が高くなる非加減速中における補正の機会を増やし、勾配の推定精度をより高めることができる。
【0078】
また、ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、降板判定しきい値LumGRDdwnよりも小さい場合にのみ、内部勾配演算値の補正を行うようにした(S2、図4)。これにより、内部勾配演算値の補正が必要な状況でのみ内部勾配演算値の補正が行われ、また、補正が頻繁に行われることによる補正後勾配のふらつきを防止することができる。
【0079】
また、また、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さい場合にのみ、内部勾配演算値の補正を行うようにした(S3、図5)。ナビ勾配が急激に変化する場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が行わることによる勾配の推定精度低下を防止することができる。
【0080】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【符号の説明】
【0081】
11 勾配推定装置
28 ナビゲーションシステム
【技術分野】
【0001】
本発明は、勾配を推定する技術に関する。
【背景技術】
【0002】
特許文献1に記載の自動変速機の変速制御装置は、勾配を推定する機能を有している。当該変速制御装置は、推定した勾配に応じてシフトパターンを変更し、勾配に適した変速を実現している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−167273号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
勾配は、車両の運転状態(車速、エンジン回転速度等)から演算によって求まる重量勾配抵抗に基づき推定することが可能である。
【0005】
しかしながら、従来の勾配の推定は、勾配急変時、勾配変化初期、又は、加減速中において、推定精度が低いとう問題があった。これは、推定処理の途中にフィルタリング処理が入っているので推定された勾配は実勾配に対して遅れ、また、加減速中は重量勾配抵抗の演算に用いる駆動力の演算誤差が大きくなるからである。
【0006】
本発明は、このような技術的課題に鑑みてなされたもので、勾配急変時、勾配変化初期、又は、加減速中であっても勾配を高い精度で推定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明のある態様によれば、勾配推定装置は、車両の運転状態に基づき車両に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき車両が走行中の勾配を推定し、これを内部勾配演算値とする。また、勾配推定装置は、ナビゲーションシステムから車両が走行中の勾配を取得し、これをナビ勾配とする。そして、勾配推定装置は、内部勾配演算値とナビ勾配との差分に基づき内部勾配演算値を補正することによって補正後勾配を演算する。
【発明の効果】
【0008】
上記態様によれば、実勾配と内部勾配演算値とのずれが大きくなる勾配急変時、勾配変化初期、又は、加減速中であっても、補正後勾配は内部勾配演算値に比べ実勾配により早く近づくことができ、勾配を高い精度で推定することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施形態に係る勾配推定装置を備えた車両の概略構成図である。
【図2】内部勾配演算値に誤差が生じる様子を示した図である。
【図3A】内部勾配演算値補正処理の内容を示したフローチャートである。
【図3B】内部勾配演算値補正処理の内容を示したフローチャートである。
【図4】ナビ勾配と勾配補正の有無との関係を示した図である。
【図5】ナビ勾配時間変化率の絶対値と勾配補正の有無との関係を示した図である。
【図6】加減速中か否かの判定の様子を示した図である。
【図7】加減速中の補正許可領域を示した図である。
【図8】勾配補正量を設定するためのテーブルである。
【図9】目標補正量を設定するためのテーブルである。
【図10】内部勾配演算値の時間変化率の絶対値と勾配補正の有無との関係を示した図である。
【図11】非加減速中の補正許可領域を示した図である。
【図12】内部勾配演算値が補正される様子を示したタイムチャートである。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0011】
図1は、本発明の実施形態に係る勾配推定装置を備えた車両の概略構成図である。
【0012】
車両1は、動力源としてエンジン2を備え、エンジン2の動力が、自動変速機3、プロペラシャフト4、デファレンシャルユニット5及びドライブシャフト6を介して左右後輪7に伝達される構成である。
【0013】
変速機コントローラ10は、自動変速機3の変速段を制御するコントローラである。変速機コントローラ10には、車速センサ21、吸気量センサ22、吸気温度センサ23、エンジン回転速度センサ24、アクセル開度センサ25、ブレーキスイッチ26、変速機出力回転速度センサ27、ナビゲーションシステム28等からの信号が入力される。変速機コントローラ10は、これらセンサ及びデバイスからの入力信号に基づき、図示しない変速マップを参照して目標とする変速段を設定し、設定された変速段が実現されるように自動変速機3を制御する。
【0014】
変速機コントローラ10は、内部に勾配推定装置11を備えており、勾配推定装置11によって推定されたた勾配に基づき、変速マップの変速線を変更して、登坂路及び降板路における運転性を向上させる。例えば、登坂路であれば、ロー側の変速段が多用されるように変速線を変更する。
【0015】
勾配推定装置11は、エンジン2の駆動力Fから加速抵抗R1、空気抵抗R2及び転がり抵抗R3を減じ、その値にフィルタ処理を施すことによって重量勾配抵抗R0を演算する。
【0016】
エンジン2の駆動力Fは、エンジン2の回転速度と吸気量とに基づき所定のマップを参照することによってエンジン2のトルクを演算し、これと自動変速機3のトルクコンバータのトルク比、自動変速機3の変速比、終減速比、自動変速機3の伝達効率、及び、駆動輪である左右後輪7のタイヤ径に基づき演算される。
【0017】
加速抵抗R1は、車両1の重量及び加速度に基づき演算される。車両1の加速度は、変速機出力回転速度の時間変化率、タイヤ径及び終減速比に基づき演算される。以後、このようにして演算された車両加速度を「内部演算加速度」と称する。
【0018】
空気抵抗R2は、車速、車両1の前面投影面積、空気密度、及び、空気抵抗係数に基づき演算される。
【0019】
転がり抵抗R3は、車両1の重量及び転がり抵抗係数に基づき演算される。
【0020】
重量勾配抵抗R0が演算された、重量勾配抵抗と勾配との関係を規定したテーブルを参照して、車両1が現在走行中の路面の勾配を演算する。このようにして演算された勾配を以後、「内部勾配演算値」と称する。
【0021】
しかしながら、このようにして演算された内部勾配演算値は勾配急変時、勾配変化初期、又は、加減速中において、推定精度が低いとう問題があった。これは、上記の通り、勾配を推定する処理にはフィルタ処理が含まれており、また、加減速時は、重量勾配抵抗の演算に用いられるエンジン2の駆動力の演算精度が低くなるからである。
【0022】
図2は、実勾配が変化したときの内部勾配演算値の変化を模式的に表した図である。内部勾配演算値の演算過程には複数のフィルタ処理が入るため、内部勾配演算値はこのように実勾配の変化に対して遅れて変化する。
【0023】
一方、ナビゲーションシステム28は地図データを備え、現在位置情報と地図データとから高度情報が得られるので、これに基づき勾配を演算すようにすることも考えられるが(以下、このようにして演算された勾配を「ナビ勾配」と称する。)、ナビゲーションシステム28に格納されている地図データには、メモリ容量(地図データを内部メモリに格納する場合)や通信速度(地図データを無線通信によって外部から入手する場合)の関係でデータが間引きされることによる誤差や、測量誤差が含まれていることから、ナビ勾配をそのまま制御に用いるには問題がある。
【0024】
そこで、勾配推定装置11は、内部勾配演算値をナビ勾配に基づき補正することで、より実際の勾配に近い勾配が得られるようにする。
【0025】
図3A及び図3Bは、内部勾配演算値を補正し、より実際の勾配に近い補正後勾配を得るための処理(内部勾配演算値補正処理)の内容を示したフローチャートであり、勾配推定装置11によって実行される。以下、これを参照しながら、内部勾配演算値の補正処理の内容について説明する。
【0026】
まず、勾配推定装置11は、カウンタkを0にセットする。カウンタkは、内部勾配演算値に後述する勾配補正量ikを加算した回数をカウントするカウンタである。
【0027】
次に、勾配推定装置11は、ナビ勾配が登坂判定しきい値LimGRDupよりも大きいか、及び、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さいかを判定する(S2)。ナビ勾配は、上記の通り、ナビゲーションシステム28からの高度情報に基づき演算される勾配であり、登坂路で正の値、平坦路でゼロ、降板路で負の値をとる。
【0028】
ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さい場合、すなわち、内部勾配演算値の補正が必要な状況である場合は、処理がS3に進む。
【0029】
これに対し、ナビ勾配が登坂判定しきい値LimGRDupと降坂判定しきい値LimGRDdwnとの間にある場合、すなわち、平坦路を走行中か勾配が僅かで内部勾配演算値の補正が必要でない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。
【0030】
平坦路や勾配が僅かな場合に内部勾配演算値の補正をしないのは、内部勾配演算値の誤差が少なく補正の必要が少ないことに加え、補正が頻繁に行われることによる補正後勾配のふらつきを防止するためである。
【0031】
この結果、図4に示すように、ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、ナビ勾配が降坂判定しきい値LimGRDdwnよりも小さい場合のみ、勾配推定装置11は内部勾配演算値の補正を行う。
【0032】
S3では、勾配推定装置11は、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さいか判断し、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さい場合は、処理がS4に進む。
【0033】
これに対し、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも大きい場合は、ナビ勾配の変化が極端であり、ナビ勾配が誤差を含んでいる可能性が高いので、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。
【0034】
ナビ勾配が極端に変化される場合とは、例えば、GPSによって自車位置を正確に測位できず地図上の自車位置が実際の自車位置とずれている場合に、その後自車位置が正確に測位されて地図上の自車位置が実際の自車位置まで瞬時に移動し、ナビゲーションシステム28からの高度情報が急激に変化する場合や、ナビゲーションシステム28のメモリ容量や通信速度の関係でデータが間引きされ、ナビ勾配が実際の勾配より急激に変化するような場合である。
【0035】
図5は、時間の経過とともにナビ勾配が変化する様子を示している。勾配推定装置11は、ナビ勾配の時間変化率が上限変化率ΔGRDよりも小さくなる時刻t1では、内部勾配演算値の補正を実行するが、ナビ勾配の時間変化率が上限変化率ΔGRDよりも大きく、ナビ勾配の誤差が大きい可能性の高いと判断される時刻t2では、内部勾配演算値の補正を行わない。
【0036】
S4では、勾配推定装置11は、内部演算加速度の絶対値が加減速判定しきい値αよりも大きいか判断する。この判断は、車両加減速中は駆動力変化が大きく、非加減速中と比べて内部勾配演算値の誤差が大きくなるので、車両1が加減速中か否かで内部勾配演算値の補正処理を異ならせるために行われる。
【0037】
図6は、加減速中か否かの判定の様子を示しており、内部演算加速度の絶対値が加減速判定しきい値αよりも大きい場合は加減速中と判断され、小さい場合は非加減速中(定常走行又は緩加減速)と判断される。
【0038】
内部演算加速度の絶対値が加減速判定しきい値αよりも大きく加減速中との判断がなされた場合は処理がS5に進み、内部演算加速度の絶対値が加減速判定しきい値αよりも小さく非加減速中との判断がなされた場合は処理がS8に進む。
【0039】
S5では、勾配推定装置11は、ナビ勾配と内部勾配演算値との差分を上限差分値ErrGrdLimupA及び下限差分値ErrGrdLimdwnAと比較し、差分が上限差分値ErrGrdLimupAと下限差分値ErrGrdLimdwnAとの間に入っているか、すなわち、差分が図7に示される補正許可領域に入っているか判断し、差分が補正許可領域に入っている場合は処理がS6に進む。
【0040】
差分が補正許可領域に入っていない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、差分が補正許可領域に入っていない場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が実行されるのを回避するためである。
【0041】
S6では、勾配推定装置11は、図8に示すテーブルを参照して、ナビ勾配と内部勾配演算値との差分に基づき、加減速時補正量VIGRDAを取得し、これを勾配補正量ikとして設定する。加減速時補正量VIGRDAは、ナビ勾配と内部勾配演算値との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば加減速時補正量VIGRDAは一定値をとる。すなわち、加減速時補正量VIGRDAには上限及び下限が設定される。
【0042】
これは、差分の絶対値が大きいほど、勾配補正量ikを増やし、内部勾配演算値が速やかに実勾配に近づくようにする一方で、補正後勾配が急変することよって補正後勾配を使用する制御(例えば、変速制御)に悪影響を及ぼしてしまうのを防止するためである。
【0043】
S7では、勾配推定装置11は、図9に示すテーブルを参照して、ナビ勾配と補正後勾配との差分に基づき、加減速時目標補正量TGRDAを取得し、これを目標補正量TGRDとして設定する。なお、S7の処理を初めて実行する場合は補正後勾配の値がないので、内部勾配演算値を補正後勾配として使用する。
【0044】
加減速時目標補正量TGRDAは、ナビ勾配と補正後勾配との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば加減速時目標補正量TGRDAは一定値をとる。すなわち、加減速時目標補正量TGRDAには上限及び下限が設定される。
【0045】
これは、差分の絶対値が大きいほどより大きな補正がなされるようにするためである。また、後述するように、内部勾配演算値に加算された勾配補正量ikの合計Sが目標補正量TGRDに達し、内部勾配演算値に加算する値を目標補正量TGRDから徐々に減らしていった場合に、補正後勾配が実勾配をオーバーシュートすることなく内部勾配演算値に収束するようにするためである。
【0046】
一方、内部演算加速度が加減速判定しきい値αよりも小さいとして進んだS8では、勾配推定装置11は、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも大きいか判断し、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも大きい場合は処理がS9に進む。
【0047】
これに対し、下限変化率ΔGRDinよりも小さい場合は処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、S2の処理と同趣旨で、内部勾配演算値の補正が必要な状況でのみ内部勾配演算値の補正が行われ、また、補正が頻繁に行われることによる補正後勾配のふらつきを防止するためである。
【0048】
図10は、S8の処理によって、内部勾配演算値の補正が許可・禁止される様子を示している。この図に示されるように、フィルタ処理前の内部勾配演算値の時間変化率の絶対値が下限変化率ΔGRDinよりも小さい場合は、内部勾配演算値の補正が禁止される。
【0049】
なお、フィルタ処理後ではなくフィルタ処理前の内部勾配演算値を用いるようにしているのは、フィルタ処理後の値は実勾配に対して遅れがあるのでその時点における勾配を判断するために用いるのは適切でないのと、非加減速中であれば演算される駆動力の演算誤差が小さく、内部勾配演算値の誤差も小さいので、フィルタ処理前の値であっても勾配の判断に十分使用可能だからである。
【0050】
フィルタ処理前の内部勾配演算値の時間変化率の絶対値が上限変化率ΔGRDinよりも大きい場合は、処理がS9に進む。
【0051】
S9では、勾配推定装置11は、ナビ勾配と内部勾配演算値との差分を上限差分値ErrGrdLimupB及び下限差分値ErrGrdLimdwnBと比較し、差分が上限差分値ErrGrdLimupBと下限差分値ErrGrdLimdwnBとの間に入っているか、すなわち、差分が図11に示される補正許可領域に入っているか判断し、差分が補正許可領域に入っている場合は処理がS10に進む。
【0052】
上限差分値ErrGrdLimupBは加減速中に使用される上限差分値ErrGrdLimupAよりも大きく、また、下限差分値ErrGrdLimdwnBは加減速中に使用される下限差分値ErrGrdLimdwnAよりも小さい。すなわち、補正許可領域は、非加減速中は、加減速中と比べて大きくなる。
【0053】
これは、非加減速中は、ナビ情報、内部勾配演算値ともに精度が高く、より広範囲にわたって補正が可能であることによる。
【0054】
差分が補正許可領域に入っていない場合は、処理がS14(図3B)に進み、内部勾配演算値の補正を行わないようにする。これは、差分が補正許可領域に入っていない場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が実行されるのを回避するためである。
【0055】
S10では、勾配推定装置11は、図8に示すテーブルを参照して、ナビ勾配と内部勾配演算値との差分に基づき、非加減速時補正量VIGRDBを取得し、これを勾配補正量ikとして設定する。非加減速時補正量VIGRDBは、ナビ勾配と内部勾配演算値との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば非加減速時補正量VIGRDBは一定値をとる。すなわち、非加減速時補正量VIGRDBには上限及び下限が設定される。
【0056】
これは、差分の絶対値が大きいほど、勾配補正量ikを増やし、内部勾配演算値が速やかに実勾配に近づくようにする一方で、補正後勾配が急変することよって補正後勾配を使用する制御(例えば、変速制御)に悪影響を及ぼしてしまうのを防止するためである。
【0057】
非加減速時補正量VIGRDBの傾向は、加減速中の加減速時補正量VIGRDAと同じ傾向であるが、非加減速中は、ナビ勾配、内部勾配演算値ともに精度が高いので、勾配補正量ikがより大きな値となるように、ナビ勾配と内部勾配演算値との差分が同じであれば、非加減速時補正量VIGRDBは加減速時補正量VIGRDAよりも大きな値に設定される。
【0058】
S11では、勾配推定装置11は、図9に示すテーブルを参照して、ナビ勾配と補正後勾配との差分に基づき、非加減速時目標補正量TGRDBを取得し、これを目標補正量TGRDとして設定する。なお、S11の処理を初めて実行する場合は、補正後勾配の値がないので、内部勾配演算値を補正後勾配として使用する。
【0059】
非加減速時目標補正量TGRDBは、ナビ勾配と補正後勾配との差分の絶対値が大きくなるほど絶対値が大きくなるが、差分の変化量に対する変化量は小さくなり、差分の絶対値がある値よりも大きくなれば非加減速時目標補正量TGRDBは一定値をとる。すなわち、非加減速時目標補正量TGRDBには上限及び下限が設定される。
【0060】
これは、差分の絶対値が大きいほど、より大きな補正がなされるようにするためである。また、後述するように、内部勾配演算値に加算される勾配補正量ikの合計Sが目標補正量TGRDに達し、内部勾配演算値に加算する値を目標補正量TGRDから徐々に減らしていった場合に、補正後勾配が実勾配をオーバーシュートすることなく内部勾配演算値に収束するようにするためである。
【0061】
非加減速時目標補正量TGRDBの傾向は、加減速中の加減速時目標補正量TGRDAと同じ傾向であるが、非加減速中は、ナビ勾配、内部勾配演算値ともに精度が高いので、目標補正量TGRAがより大きな値となるように、ナビ勾配と補正勾配との差分が同じであれば、非加減速時目標補正量TGRDBは加減速時目標補正量TGRDAよりも大きな値に設定される。
【0062】
S6又はS10で勾配補正量ikが設定され、S7又はS8で目標補正量TGRDが設定されたら、勾配推定装置11は、勾配補正量ikの合計S(初期値は0)を更新し、合計Sを内部勾配演算値に加算することで補正後勾配を演算する(S12)。そして、勾配推定装置11は、カウンタkに1を加算する(S14)。
【0063】
以後、処置はS2に戻り、S2〜S13の処理が再び実行され、補正後勾配が更新される。
【0064】
その後、内部勾配演算値に加算される勾配補正量ikの合計Sの絶対値が目標補正量TGRDの絶対値に達したら、処理がS13からS14(図3B)に進む(S13)。
【0065】
S14では、勾配推定装置11は、補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きいか判断する。補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きい場合は、補正後勾配の絶対値が内部勾配演算値の絶対値よりも大きくなくなるまで、補正後勾配に加算する値を目標補正量TGRDから所定値DecGRDずつ減少させる処理(S15〜S18)を繰り返す。
【0066】
これによって、補正後勾配を徐々に内部勾配演算値に近づけ、最終的には補正後勾配を内部勾配演算値に一致させ、内部勾配演算値の補正処理を終了する。
【0067】
続いて、上記内部勾配演算値の補正を行うことによる作用効果について説明する。
【0068】
図12は、上記処理によって内部勾配演算値が補正される様子を示したタイムチャートである。
【0069】
この図に示されるように、内部勾配演算値はフィルタ処理があるために実勾配に対して遅れて変化し、補正後勾配は、ナビ勾配と内部勾配演算値との差分に基づき演算される勾配補正量ikを繰り返し内部勾配演算値に加算することで演算される(S13)。
【0070】
この結果、実勾配と内部勾配演算値とのずれが大きくなる勾配急変時、勾配変化初期、又は、加減速中であっても、補正後勾配は内部勾配演算値に比べ実勾配により早く近づくことができ、勾配を高い精度で推定することができる。
【0071】
そして、内部勾配演算値に加算された勾配補正量ikの合計Sが目標補正量TGRDに達したら、以後、内部勾配演算値に加算される値を目標補正量からDecGRDずつ減少させて、補正後勾配を内部勾配演算値に近づけるので(S14〜S18、図12中Aで囲んだ部分)、補正後勾配が実勾配をオーバーシュートするのを防止することができる。
【0072】
また、車両1の加速度の絶対値が加減速判定しきい値αよりも小さい場合は、車両1の加速度の絶対値が加減速判定しきい値αよりも大きい場合よりも、内部勾配演算値の補正を大きくするようにした。
【0073】
具体的には、内部勾配演算値とナビ勾配との差分に対する内部勾配演算値の補正量である勾配補正量ikの関係を規定するテーブルを、車両1の加速度が加減速判定しきい値αよりも小さい非加減速中と加減速判定しきい値αよりも大きい加減速中とそれぞれの場合について用意し(S6、S10、図8、図8は2つのテーブルを重ね合わせたもの)、これらのテーブルを参照して勾配補正量ikを演算するようにした。
【0074】
非加減速中はナビ勾配及び内部勾配演算値の精度が高いので、勾配補正量ikを増やしても問題は無く、これによって補正後勾配をより早く実勾配に近づけることが可能になる。また、加減速中と非加減速中で勾配補正量ikを異ならせる方法としては、本実施形態のようにそれぞれの場合について内部勾配演算値とナビ勾配との差分に対する勾配補正量ikの関係を規定するテーブルを用意するのが簡便で好適である。
【0075】
また、車両1の加速度の絶対値が加減速判定しきい値αよりも小さい場合は、内部勾配演算値の時間変化率の絶対値が上限変化率ΔGRDinよりも大きい場合にのみ、内部勾配演算値の補正を行うようにした(S8、図10)。非加減速中は、内部勾配演算値の精度が高いので、内部勾配演算値に基づき比較的精度よく勾配を判断することが可能である。そして、内部勾配演算値の補正を、内部勾配演算値の時間変化率が下限変化率ΔGRDinよりも大きい場合に限定することで、内部勾配演算値の補正が必要な状況でのみ実行されるようにし、内部勾配演算値の補正が不要な状況(平坦路、又は、勾配が僅かな状況)で内部勾配演算値の補正が頻繁に行われ、補正後勾配の値がふらつくのを防止することができる。
【0076】
また、ナビ勾配と内部勾配演算値との差分が、下限差分値ErrGrdLimdwnA(又はErrGrdLimdwnB)と上限差分値ErrGrdLimupA(又はErrGrdLimupB)の間にある場合にのみ、内部勾配演算値の補正を行うようにした(S5、S9、図7、図11)。これにより、ナビ勾配に含まれる誤差が大きい可能性がある状況では内部勾配演算値の補正が行われなくなり、ナビ勾配の誤差が大きい状況で内部勾配演算値の補正が行われることによる、勾配の推定精度悪化を防止することができる。
【0077】
このとき、車両1の加速度が加減速判定しきい値αよりも小さい場合は、車両1の加速度が加減速判定しきい値αよりも大きい場合よりも、下限差分値を小さくするとともに、上限差分値を大きくするようにした(S5、S9、図7、図11)。これにより、ナビ勾配及び内部勾配演算値の精度が高くなる非加減速中における補正の機会を増やし、勾配の推定精度をより高めることができる。
【0078】
また、ナビ勾配が登坂判定しきい値LimGRDupよりも大きい場合、又は、降板判定しきい値LumGRDdwnよりも小さい場合にのみ、内部勾配演算値の補正を行うようにした(S2、図4)。これにより、内部勾配演算値の補正が必要な状況でのみ内部勾配演算値の補正が行われ、また、補正が頻繁に行われることによる補正後勾配のふらつきを防止することができる。
【0079】
また、また、ナビ勾配の時間変化率の絶対値が上限変化率ΔGRDよりも小さい場合にのみ、内部勾配演算値の補正を行うようにした(S3、図5)。ナビ勾配が急激に変化する場合は、ナビ勾配に含まれている誤差が大きい可能性が高いので、このような状況で内部勾配演算値の補正が行わることによる勾配の推定精度低下を防止することができる。
【0080】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【符号の説明】
【0081】
11 勾配推定装置
28 ナビゲーションシステム
【特許請求の範囲】
【請求項1】
車両が走行中の勾配を推定する勾配推定装置であって、
前記車両の運転状態に基づき前記車両に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき前記車両が走行中の勾配を推定し、これを内部勾配演算値とする内部勾配演算手段と、
ナビゲーションシステムから前記車両が走行中の勾配を取得し、これをナビ勾配とするナビ勾配取得手段と、
前記内部勾配演算値と前記ナビ勾配との差分に基づき前記内部勾配演算値を補正することによって補正後勾配を演算する補正後勾配演算手段と、
を備えたことを特徴とする勾配推定装置。
【請求項2】
請求項1に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度の絶対値が加減速判定しきい値よりも小さい場合は、前記車両の加速度の絶対値が前記加減速判定しきい値よりも大きい場合よりも、前記内部勾配演算値の補正量を大きくする、
ことを特徴とする勾配推定装置。
【請求項3】
請求項2に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度の絶対値が加減速判定きい値よりも小さい場合は、前記内部勾配演算値の時間変化率が下限変化率よりも大きい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項4】
請求項1から3のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配と前記内部勾配演算値との差分が、下限差分値と上限差分値との間にある場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項5】
請求項4に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度が加減速判定しきい値よりも小さい場合は、前記車両の加速度が前記加減速判定しきい値よりも大きい場合よりも、前記下限差分値を小さくするとともに、前記上限差分値を大きくする、
ことを特徴とする勾配推定装置。
【請求項6】
請求項2又は3に記載の勾配推定装置であって、
前記内部勾配演算値と前記ナビ勾配の差分と前記内部勾配演算値の補正量である勾配補正量との関係を規定するテーブルを、前記車両の加速度が前記加減速判定しきい値よりも小さい場合と前記加減速判定しきい値よりも大きい場合とそれぞれについて備え、
前記補正後勾配演算手段は、これらのテーブルを参照して、前記勾配補正量を演算する、
ことを特徴とする勾配推定装置。
【請求項7】
請求項6に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記勾配補正量を前記内部勾配演算値に繰り返し加算することで前記補正後勾配を演算する、
ことを特徴とする勾配推定装置。
【請求項8】
請求項7に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配から前記補正後勾配を引いた値に基づき目標補正量を設定し、
前記内部勾配演算値に加算された前記勾配補正量の合計が前記目標補正量に達したら、以後、前記内部勾配演算値に加算される値を前記目標補正量から減少させて、前記補正後勾配を前記内部勾配演算値に近づける、
ことを特徴とする勾配推定装置。
【請求項9】
請求項1から8のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配が登坂判定しきい値よりも大きい場合、又は、降板判定しきい値よりも小さい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項10】
請求項1から9のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配の時間変化率の絶対値が上限変化率よりも小さい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項1】
車両が走行中の勾配を推定する勾配推定装置であって、
前記車両の運転状態に基づき前記車両に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき前記車両が走行中の勾配を推定し、これを内部勾配演算値とする内部勾配演算手段と、
ナビゲーションシステムから前記車両が走行中の勾配を取得し、これをナビ勾配とするナビ勾配取得手段と、
前記内部勾配演算値と前記ナビ勾配との差分に基づき前記内部勾配演算値を補正することによって補正後勾配を演算する補正後勾配演算手段と、
を備えたことを特徴とする勾配推定装置。
【請求項2】
請求項1に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度の絶対値が加減速判定しきい値よりも小さい場合は、前記車両の加速度の絶対値が前記加減速判定しきい値よりも大きい場合よりも、前記内部勾配演算値の補正量を大きくする、
ことを特徴とする勾配推定装置。
【請求項3】
請求項2に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度の絶対値が加減速判定きい値よりも小さい場合は、前記内部勾配演算値の時間変化率が下限変化率よりも大きい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項4】
請求項1から3のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配と前記内部勾配演算値との差分が、下限差分値と上限差分値との間にある場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項5】
請求項4に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記車両の加速度が加減速判定しきい値よりも小さい場合は、前記車両の加速度が前記加減速判定しきい値よりも大きい場合よりも、前記下限差分値を小さくするとともに、前記上限差分値を大きくする、
ことを特徴とする勾配推定装置。
【請求項6】
請求項2又は3に記載の勾配推定装置であって、
前記内部勾配演算値と前記ナビ勾配の差分と前記内部勾配演算値の補正量である勾配補正量との関係を規定するテーブルを、前記車両の加速度が前記加減速判定しきい値よりも小さい場合と前記加減速判定しきい値よりも大きい場合とそれぞれについて備え、
前記補正後勾配演算手段は、これらのテーブルを参照して、前記勾配補正量を演算する、
ことを特徴とする勾配推定装置。
【請求項7】
請求項6に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記勾配補正量を前記内部勾配演算値に繰り返し加算することで前記補正後勾配を演算する、
ことを特徴とする勾配推定装置。
【請求項8】
請求項7に記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配から前記補正後勾配を引いた値に基づき目標補正量を設定し、
前記内部勾配演算値に加算された前記勾配補正量の合計が前記目標補正量に達したら、以後、前記内部勾配演算値に加算される値を前記目標補正量から減少させて、前記補正後勾配を前記内部勾配演算値に近づける、
ことを特徴とする勾配推定装置。
【請求項9】
請求項1から8のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配が登坂判定しきい値よりも大きい場合、又は、降板判定しきい値よりも小さい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【請求項10】
請求項1から9のいずれか一つに記載の勾配推定装置であって、
前記補正後勾配演算手段は、前記ナビ勾配の時間変化率の絶対値が上限変化率よりも小さい場合にのみ、前記内部勾配演算値の補正を行う、
ことを特徴とする勾配推定装置。
【図1】


【図2】
【図3A】
【図3B】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】

【図12】

【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−44558(P2013−44558A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180605(P2011−180605)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]